Что такое TB6612FNG и каковы его основные характеристики. Как подключить и использовать TB6612FNG для управления двигателями. Какие преимущества дает TB6612FNG по сравнению с другими драйверами двигателей. На что обратить внимание при работе с TB6612FNG.
Что представляет собой драйвер двигателей TB6612FNG
TB6612FNG — это компактный и эффективный драйвер для управления двумя двигателями постоянного тока или одним шаговым двигателем. Он разработан компанией Toshiba и обладает следующими ключевыми характеристиками:
- Напряжение питания: 2.5-13.5В
- Максимальный постоянный ток: 1.2А на канал
- Пиковый ток: 3.2А на канал
- Частота ШИМ: до 100 кГц
- Встроенная защита от перегрева
- Малые размеры: корпус SSOP24
TB6612FNG позволяет независимо управлять двумя двигателями постоянного тока, регулируя их скорость и направление вращения. Это делает его отличным выбором для различных робототехнических проектов.
Подключение и использование TB6612FNG
Для работы с TB6612FNG необходимо подключить:
- Питание двигателей VM (2.5-13.5В)
- Питание логики VCC (2.7-5.5В)
- Входы управления направлением IN1, IN2 для первого двигателя
- Входы управления направлением IN3, IN4 для второго двигателя
- Входы ШИМ PWMA и PWMB для регулировки скорости
- Вывод STBY для включения/выключения драйвера
Управление двигателями осуществляется подачей сигналов на входы IN1-IN4 и ШИМ-сигналов на PWMA/PWMB. Это позволяет реализовать различные режимы работы:
- Вращение по часовой стрелке
- Вращение против часовой стрелки
- Быстрая остановка
- Плавная остановка
- Регулировка скорости с помощью ШИМ
Преимущества TB6612FNG перед другими драйверами
TB6612FNG имеет ряд преимуществ по сравнению с популярным драйвером L298N:
- Более высокий КПД за счет использования MOSFET-транзисторов
- Меньшие размеры и вес
- Встроенная защита от перегрева
- Более высокая частота ШИМ (до 100 кГц)
- Меньшее падение напряжения на драйвере
Это позволяет использовать TB6612FNG в более компактных устройствах и получать лучшую производительность при управлении двигателями.
На что обратить внимание при работе с TB6612FNG
При использовании TB6612FNG следует учитывать несколько важных моментов:
- Не превышать максимально допустимый ток и напряжение
- Обеспечить хороший теплоотвод при работе на больших токах
- Использовать конденсаторы для фильтрации помех по цепям питания
- Правильно подключать защитные диоды при работе с индуктивной нагрузкой
- Учитывать падение напряжения на драйвере при выборе напряжения питания двигателей
При соблюдении этих рекомендаций TB6612FNG обеспечит надежное и эффективное управление двигателями в вашем проекте.
Практические примеры использования TB6612FNG
TB6612FNG широко применяется в различных областях робототехники и автоматизации. Вот несколько примеров его использования:
- Управление моторами в мобильных роботах
- Приводы в 3D-принтерах и ЧПУ-станках
- Автоматизированные системы в умном доме
- Управление сервоприводами в игрушках
- Небольшие электротранспортные средства
Благодаря своей универсальности, TB6612FNG может применяться практически в любых проектах, требующих управления двигателями постоянного тока малой и средней мощности.
Программное управление TB6612FNG
Для управления TB6612FNG с помощью микроконтроллера (например, Arduino) можно использовать следующие базовые функции:
- Установка направления вращения двигателей
- Управление скоростью с помощью ШИМ
- Плавный разгон и торможение
- Реализация различных режимов работы
Вот пример простого кода для управления двигателем с помощью Arduino:
«`cpp // Определение выводов #define PWMA 5 #define AIN1 7 #define AIN2 8 #define STBY 9 void setup() { pinMode(PWMA, OUTPUT); pinMode(AIN1, OUTPUT); pinMode(AIN2, OUTPUT); pinMode(STBY, OUTPUT); digitalWrite(STBY, HIGH); // Включение драйвера } void loop() { // Вращение вперед digitalWrite(AIN1, HIGH); digitalWrite(AIN2, LOW); analogWrite(PWMA, 200); // Скорость 0-255 delay(2000); // Вращение назад digitalWrite(AIN1, LOW); digitalWrite(AIN2, HIGH); analogWrite(PWMA, 200); delay(2000); // Остановка digitalWrite(AIN1, LOW); digitalWrite(AIN2, LOW); analogWrite(PWMA, 0); delay(1000); } «`Этот код демонстрирует базовое управление одним двигателем с изменением направления вращения и скорости. Для более сложных задач можно разработать библиотеку, реализующую все возможности TB6612FNG.
Альтернативы TB6612FNG
Хотя TB6612FNG является отличным выбором для многих проектов, существуют и альтернативные решения:
- L298N — более мощный, но менее эффективный драйвер
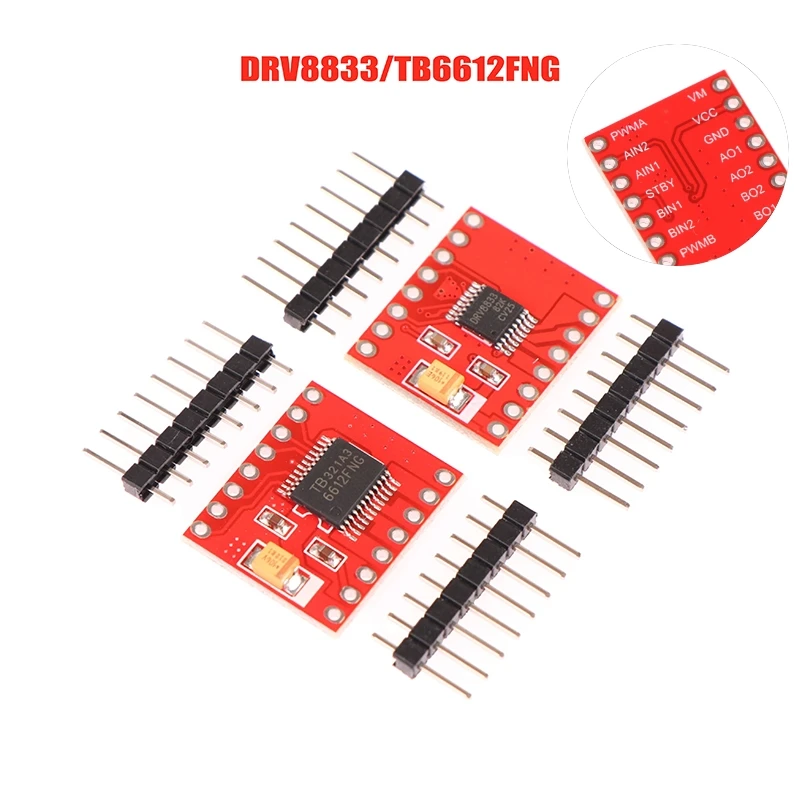
- DRV8833 — похожий по характеристикам драйвер от Texas Instruments
- A4988 — специализированный драйвер для шаговых двигателей
- L9110S — простой драйвер для маломощных двигателей
Выбор конкретного драйвера зависит от требований проекта, таких как необходимая мощность, напряжение питания, размеры и стоимость.
Заключение
TB6612FNG представляет собой современное и эффективное решение для управления двигателями постоянного тока в различных проектах. Его основные преимущества:
- Высокая эффективность и низкое тепловыделение
- Компактные размеры
- Широкий диапазон напряжений питания
- Возможность управления двумя двигателями независимо
- Встроенные защитные функции
При правильном использовании TB6612FNG обеспечивает надежное и эффективное управление двигателями в робототехнических и автоматизированных системах. Его универсальность и доступность делают его отличным выбором для широкого спектра проектов — от любительских до профессиональных.
Драйвер TB6612FNG | AlexGyver Community
VictorArx
★★✩✩✩✩✩
- #1
Здравствуйте дорогие форумчане! Только зарегистрировался и ещё не очень знаю порядки на форуме, прошу сильно не пинать. Вопрос такой. Как соединить два драйвера
TB6612FNG, чтобы увеличить силу тока на моторы. С уважением .
bort707
★★★★★★✩
- #2
зачем два? один будет усиливать другой, чтоли?VictorArx написал(а):
соединить два драйвера
Нажмите для раскрытия.
..
 ..
..
Эдуард Анисимов
★★★★★★✩
- #3
По моему никак.
Только собрать аналог на рассыпухе. На мощных транзисторах.
VictorArx
★★✩✩✩✩✩
- #4
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А. Это я прочитал в характеристиках. Дать ссылку?PiratFox написал(а):
Опять люди прогуливали школьные уроки физики, где про закон Ома рассказывали.
Печально, господа — товарищи… Нажмите для раскрытия…
Эдуард Анисимов
★★★★★★✩
- #5
Дайте. Интересно.
VictorArx
★★✩✩✩✩✩
- #6
Надеюсь никого не обидел. Счас нарисую. http://know.smartelements.ru/main:motors:tb6612Эдуард Анисимов написал(а):
Дайте.
Интересно.
Нажмите для раскрытия…
xof
★✩✩✩✩✩✩
- #7
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.VictorArx написал(а):
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А. Это я прочитал в характеристиках. Дать ссылку?
Нажмите для раскрытия…
 2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.Даташит производителя не упоминает про объединение драйверов или каналов.
Да и зачем вообще эти извращения ? Почему не взять более подходящий драйвер сразу ?
VictorArx
★★✩✩✩✩✩
- #8
Избыточное цитирование
Можете посоветовать мощнее? Габариты не должны быть большими, не влезут в модель.xof написал(а):
The TB6612FNG Motor Driver can control up to two DC motors at a constant current of 1.2A (3.2A peak). Two input signals (IN1 and IN2) can be used to control the motor in one of four function modes: CW, CCW, short-brake and stop. The two motor outputs (A and B) can be separately controlled, and the speed of each motor is controlled via a PWM input signal with a frequency up to 100kHz. The STBY pin should be pulled high to take the motor out of standby mode.
Даташит производителя не упоминает про объединение драйверов или каналов.
Да и зачем вообще эти извращения ? Почему не взять более подходящий драйвер сразу ?
Нажмите для раскрытия…
Эдуард Анисимов
★★★★★★✩
- #9
@VictorArx, Там об этом ни слова. По крайней мере я не нашёл.
По крайней мере я не нашёл.
VictorArx
★★✩✩✩✩✩
- #10
ОписаниеЭдуард Анисимов написал(а):
@VictorArx, Там об этом ни слова. По крайней мере я не нашёл.
Нажмите для раскрытия…
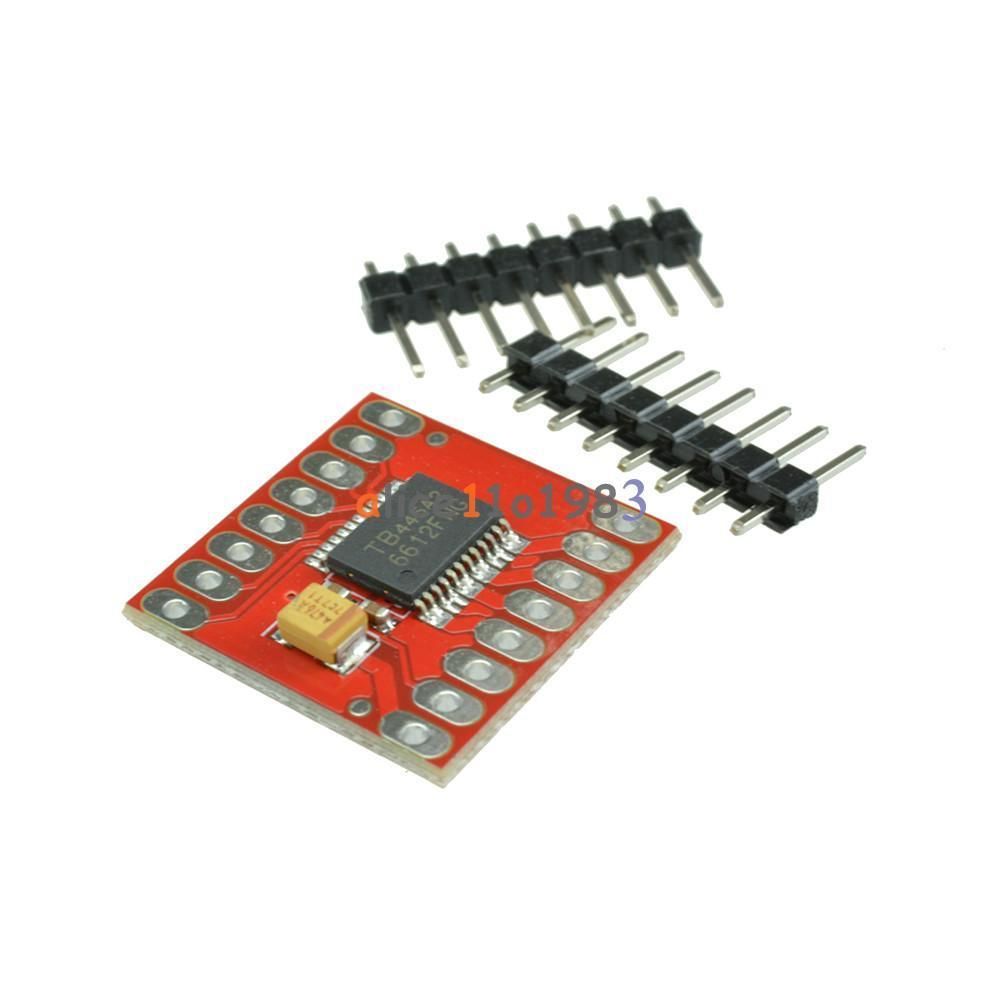
Драйвер моторов представляет из себя плату с микросхемой, позволяющей управлять моторами.
Напрямую, подключать моторы к контроллерам очень опасно, так как моторы потребляют значительно больший ток, чем может выдать контроллер. Для решения задачи разделения питания и управления моторами и существуют драйверы моторов.
Драйвер моторов на базе микросхемы TB6612 позволит управлять мощными моторами или сервоприводом. С помощью данного драйвера можно независимо управлять двумя коллекторными моторами или одним шаговым. Драйвер обладает компактными размерами и будет незаменим в управлении небольшими роботами или в компактных проектах, где использовать шилды или громоздкие драйверы затруднительно.
Модуль имеет два управляющих канала, каждый из которых позволяет управлять нагрузкой до 1,2 А. Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А.
Микросхема имеет встроенную защиту по температуре, перенапряжению и короткому замыканию.
PiratFox
★★★★★✩✩
- #11
Да я же не злобно…VictorArx написал(а):
Это я про уроки школьной физики ответил пирату.
Нажмите для раскрытия…
Смотрел даташит. Так Вы перепутали. Тама суммированы токи по двум каналам, а через один тот же остался. Увы и аххх…
Эдуард Анисимов
★★★★★★✩
- #12
Так пусть схему покажут как это сделать, раз утверждают.VictorArx написал(а):
Два канала можно объединить в один и управлять одним мощным мотором до 2,4 А.
Нажмите для раскрытия…
Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками.
 Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.А здесь схема и так уже мостовая. Если параллельно соединить два моста, можно получить хороший бадабум. А может и нет. Пусть схему покажут, тогда поверю.
И как писал @xof, в даташите нет упоминания про такое включение. А нет в даташите, нет в реале.
И на лифте то же много чего написано, однако он поднимается на стальном тросе.
VictorArx
★★✩✩✩✩✩
- #13
Избыточное цитирование
Согласен с Вами. Обычно , если утверждают подобное, то приводят принципиальную схему. Буду искать более мощный драйвер. Этот понравился по причине малых габаритов и без радиатора. Алекс советовал в видео.Эдуард Анисимов написал(а):
Так пусть схему покажут как это сделать, раз утверждают.

Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками. Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
А здесь схема и так уже мостовая. Если параллельно соединить два моста, можно получить хороший бадабум. А может и нет. Пусть схему покажут, тогда поверю.
И как писал @xof, в даташите нет упоминания про такое включение. А нет в даташите, нет в реале.
И на лифте то же много чего написано, однако он поднимается на стальном тросе.Нажмите для раскрытия…
PiratFox
★★★★★✩✩
- #14
Эдик, но ведь ток через один транзистор не изменится. Ты ведь Инженер, хоть ты уж не путай ток и мощность. Или что, транзисторы параллельно соединять для увеличения тока? Теоретически возможно, но на практике тот ещё цирк. Серьёзные инженеры такой вариант даже не обсуждают.Эдуард Анисимов написал(а):
Я знаю, что можно взять две полумостовые схемы, которые управляют двумя нагрузками.
Если их объеденить в мост, они смогут управлять нагрузкой в два раза мощнее.
Нажмите для раскрытия…
VictorArx
★★✩✩✩✩✩
- #15
Как Вам это?VictorArx написал(а):
Согласен с Вами. Обычно , если утверждают подобное, то приводят принципиальную схему.
Буду искать более мощный драйвер. Этот понравился по причине малых габаритов и без радиатора. Алекс советовал в видео.
Нажмите для раскрытия…
Эдуард Анисимов
★★★★★★✩
- #16
Прочитал это и задумался. А ведь здравая мысль. Но здесь есть какое то но. Не зря же применяют такое включение. Я это знаю по обычным аккустическим усилителям. Сам усилитель — это полумост. Если на один подать прямой сигнал а на второй в противофазе, то колонку можно подключить от выхода одного к выходу второго. Получается мостовая схема. Увеличивающая выходную мощность в два раза. Но при этом меняется схема подключения. При обычном подключении нагрузка подключена относительно земли и при питании +-70 вольт, на динамике напруга меняется в этих пределах. В мостовом включении получается что на динамик подаётся +-140 вольт. Вот и увеличение выходной мощности при том же токе.PiratFox написал(а):
Эдик, но ведь ток через один транзистор не изменится.
Ты ведь Инженер, хоть ты уж не путай ток и мощность. Или что, транзисторы параллельно соединять для увеличения тока? Теоретически возможно, но на практике тот ещё цирк. Серьёзные инженеры такой вариант даже не обсуждают.
Нажмите для раскрытия…
Nikanor
★★✩✩✩✩✩
- #17
такой бутер возможен . если микросхемы полностью одинаковые.VictorArx написал(а):
Как Вам это?Нажмите для раскрытия…
такое возможно только если они из одной партии.
а это не ведомо.
если запаралелить два канала — должно работать.
только про радиатор нужно помнить.
poty
★★★★★★✩
- #18
@VictorArx, это профанация. Подключенные двигатели без нагрузки не смогут «взять» ток в 5А, очевидно это и спасает автора такого видео от фиаско.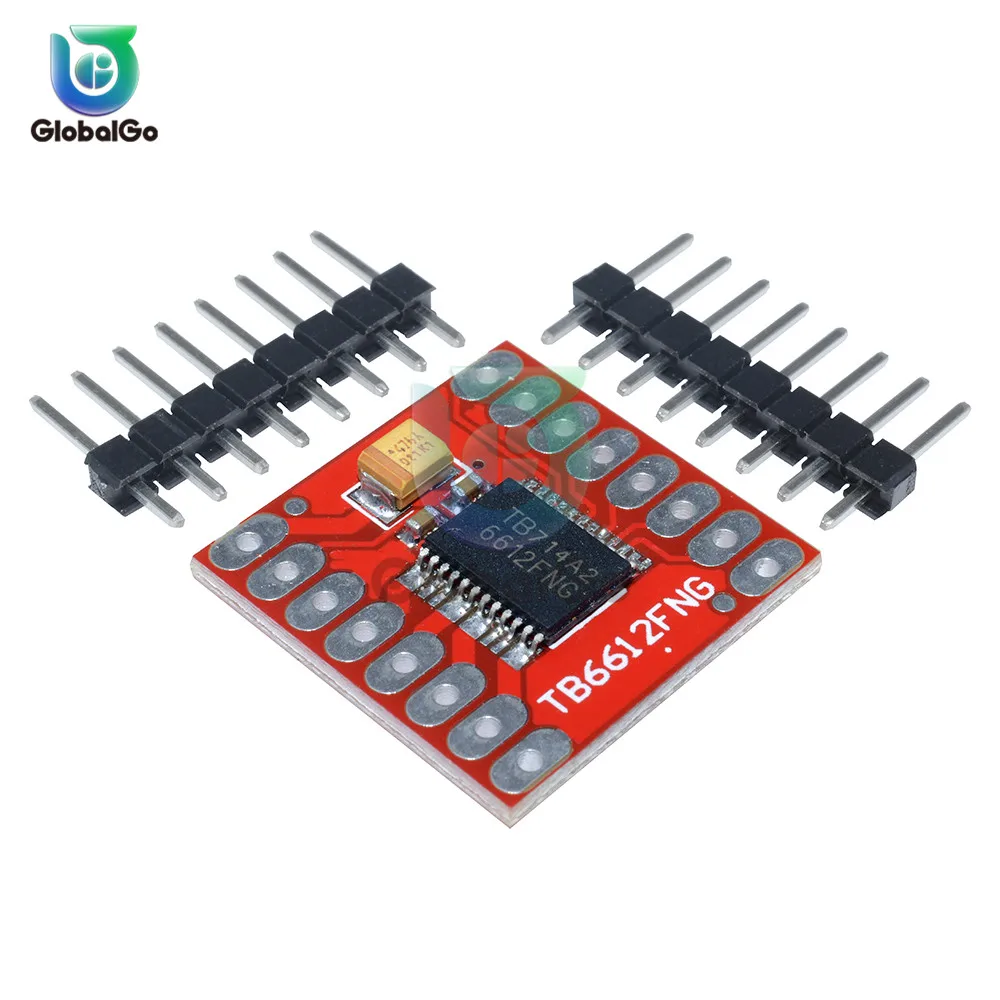 Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель. Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель. Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
VictorArx
★★✩✩✩✩✩
- #19
Если запараллелить каналы, как сказал предыдущий товарищь, мобудь сработает? Мне надо на канал 2A.poty написал(а):
@VictorArx, это профанация. Подключенные двигатели без нагрузки не смогут «взять» ток в 5А, очевидно это и спасает автора такого видео от фиаско. Если Вы посмотрите на его канал, то увидите, что один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель.
Вернее, он соединил три 1А преобразователей, но максимум тока получил около 2А. Посчитал, что один из преобразователей — неисправен. Ха-ха…
Нажмите для раскрытия…
PiratFox
★★★★★✩✩
- #20
один раз он уже «не понимал», почему не может соединить несколько DC/DC преобразователей впараллель.
Дык ясно, почему не понимал. Потому, что этот человек ни разу не инженер. Более того, он ещё и школьную физику плохо знает, а вернее, не знает совсем.
VictorArx
★★✩✩✩✩✩
- #21
Буду эксперементировать. Так , как я тоже не инженер, а токмо учусь, поэтому чтобы запараллелить два канала одного драйвера нужно просто соединять все одноимённые выводы с одинаковыми цифрами? Например А1 с В1 и т.Nikanor написал(а):
такой бутер возможен . если микросхемы полностью одинаковые.
такое возможно только если они из одной партии.
а это не ведомо.если запаралелить два канала — должно работать.
только про радиатор нужно помнить.
Нажмите для раскрытия…
 д.
д.
PiratFox
★★★★★✩✩
- #22
не делайте такого, если Вы в здравом уме. Впрочем, если хотите ощутить запах горелой электроники — то вперёд!VictorArx написал(а):
Если запараллелить каналы, как сказал предыдущий товарищь, мобудь сработает? Мне надо на канал 2A.
Нажмите для раскрытия…
Nikanor
★★✩✩✩✩✩
- #23
на L293D я такое делал.
и никакого дыма не было.
может и с этим прокатит.
драйвер не дорогой.
можно и попробовать.
ну а нет — берите более мощный.
только размеры будут намного больше.
VictorArx
★★✩✩✩✩✩
- #24
За драйвер я не переживаю. У меня радиоуправляемый механизм.Nikanor написал(а):
на L293D я такое делал.
и никакого дыма не было.
может и с этим прокатит.
драйвер не дорогой.
можно и попробовать.
ну а нет — берите более мощный.
только размеры будут намного больше.Нажмите для раскрытия…
 Чтоб всю электронику, нажитую непосильным трудом не спалить.
Чтоб всю электронику, нажитую непосильным трудом не спалить.
ТехнарьКто
★★★★★✩✩
- #25
Предложенный вариант может быть реализован при условии, что параллельно соединенные модули имеют совершенно идентичные характеристики и работают при одинаковой температуре.VictorArx написал(а):
Буду эксперементировать. Так , как я тоже не инженер, а токмо учусь, поэтому чтобы запараллелить два канала одного драйвера нужно просто соединять все одноимённые выводы с одинаковыми цифрами? Например А1 с В1 и т.д.
Нажмите для раскрытия…
 Такое условие практически нереализуемо из-за относительно больших разбросов характеристик. При параллельном включении для выравнивания токов применяют резисторы малых сопротивлений на выходе силовой части. Например A1 на резистор и B1 на резистор, а уже свободные концы резисторов объединяют. При этом надо понимать, что ожидаемый ток будет 75% от суммы токов всех устройств. В ролике с технической точки зрения показан бред, а реальность штука жестокая да еще и с приколами. Прикол заключается в том, что привинтив радиатор на микросхему модуля да еще и вентилятор сверху, можно получить эти два ампера и с одного модуля. Вы наверняка забыли, что двигатель в момент запуска потребляет значительно больше номинального и Вам отнюдь надо много более 2A. Пробуйте объединять, но с резисторами. Потом расскажите.
Такое условие практически нереализуемо из-за относительно больших разбросов характеристик. При параллельном включении для выравнивания токов применяют резисторы малых сопротивлений на выходе силовой части. Например A1 на резистор и B1 на резистор, а уже свободные концы резисторов объединяют. При этом надо понимать, что ожидаемый ток будет 75% от суммы токов всех устройств. В ролике с технической точки зрения показан бред, а реальность штука жестокая да еще и с приколами. Прикол заключается в том, что привинтив радиатор на микросхему модуля да еще и вентилятор сверху, можно получить эти два ампера и с одного модуля. Вы наверняка забыли, что двигатель в момент запуска потребляет значительно больше номинального и Вам отнюдь надо много более 2A. Пробуйте объединять, но с резисторами. Потом расскажите.
Драйвер двигателя tb6612fng в категории «Техника и электроника»
Войди и получай выгодные условия доставки
поиск в товарах / по продавцам
Наборы и компоненты для самостоятельной сборки электроники
Компрессометры и масломеры автомобильные
Контакты, разъемы для плат
Масла, смазки для инструмента
Программаторы микросхем
Запчасти и комплектующие для 3D устройств
Контроллеры и комплектующие для SATA, SAS, SCSI RAID
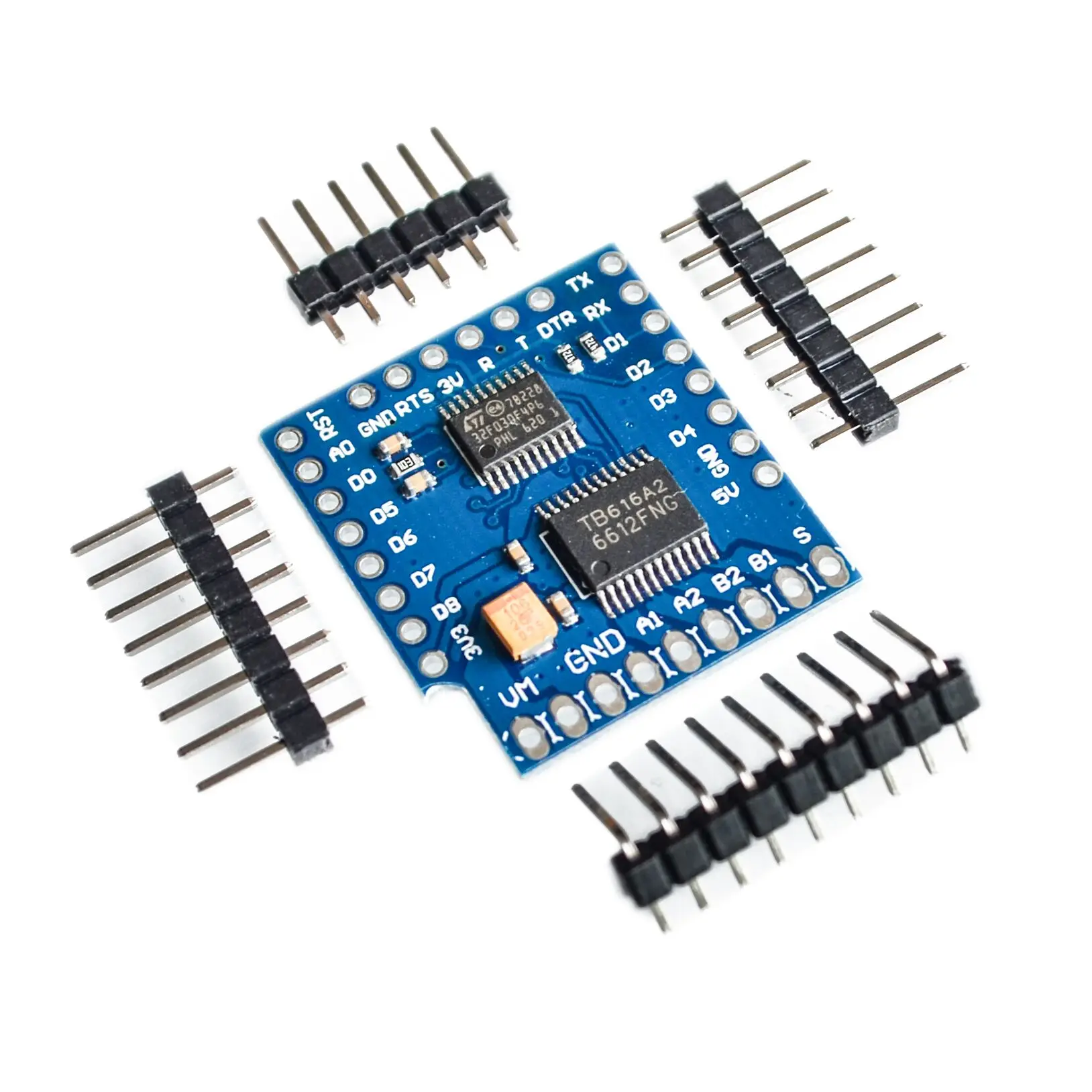
Драйвер шагового двигателя TB6612FNG для WeMos D1 mini
Готово к отправке
224 грн
Купить
ОдессаДрайвер шагового двигателя TB6612FNG
Готово к отправке
224 грн
Купить
ОдессаДрайвер шагового двигателя TB6612FNG V3. 0 PSX2 NRF24L01 + ИК IIC
0 PSX2 NRF24L01 + ИК IIC
Готово к отправке
897 грн
Купить
ОдессаДрайвер шагового двигателя TB6612FNG для WeMos D1 mini
Готово к отправке
220 грн
Купить
ОдессаДрайвер шагового двигателя TB6612FNG
Готово к отправке
220 грн
Купить
ОдессаДрайвер шагового двигателя TB6612FNG V3.0 PSX2 NRF24L01 + ИК IIC
Готово к отправке
878 грн
Купить
ОдессаШилд WeMos для ESP8266 D1 Mini двойной драйвер мотора TB6612FNG
В наличии
154.80 грн
172 грн
Купить
Шилд WeMos для ESP8266 D1 Mini двойной драйвер мотора TB6612FNG
В наличии
225 грн
Купить
Модуль WEMOS I2C Dual Motor Driver для Arduino
Недоступен
117 грн
Смотреть
Драйвер двигателя TB6612FNG Arduino (аналог L298N) [#9-6]
Недоступен
54 грн
Смотреть
ЗапорожьеСмотрите также
Двухканальный драйвер
Шаговый драйвер
Стартовый набор arduino
Драйвер мотора
Драйвер шагового двигателя для ардуино
Arduino display
Ардуино модули
Ардуино комплектующие
Набор модулей для arduino
Внешние датчики
Драйвер шагового двигателя tb6600
Драйвер двигателя l298
Модуль драйвер двигателя l298n
Arduino контроллер двигателя
Драйвера ардуино
Драйвер двигателя tb6612fng со скидкой
Драйвер двигателя tb6612fng оптом
Популярные категории
Техника и электроника
Запчасти для техники и электроники
Наборы и компоненты для самостоятельной сборки электроники
Оборудование и товары для предоставления услуг
Оборудование для автосервиса
Оборудование для техосмотра и контрольное оборудование
Компрессометры и масломеры автомобильные
Электрооборудование
Электронные компоненты
Пассивные компоненты
Контакты, разъемы для плат
Компоненты АСУТП
Программаторы микросхем
Инструмент
Оснастка для инструмента
Масла, смазки для инструмента
Насколько вам
удобно на проме?
TB6612FNG Dual Motor Driver Carrier
Обзор
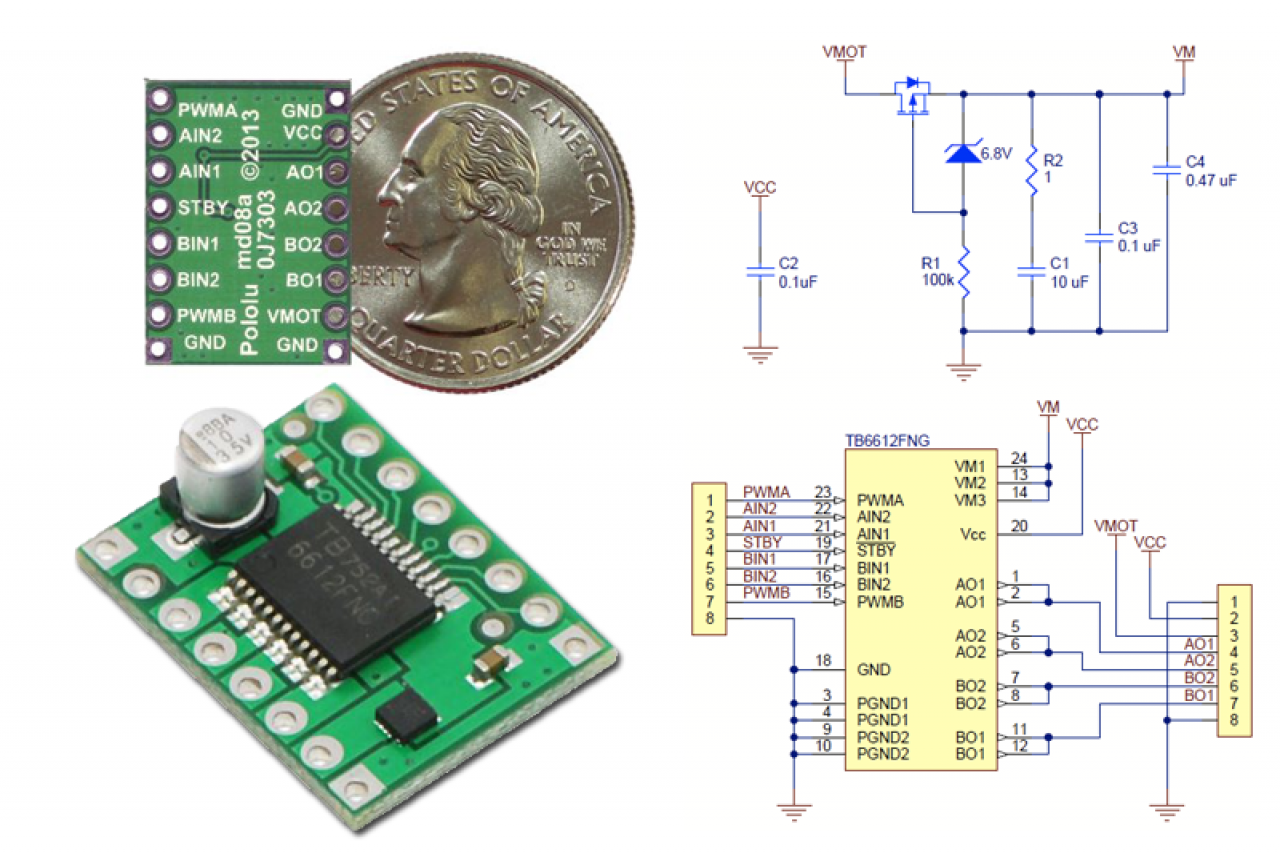
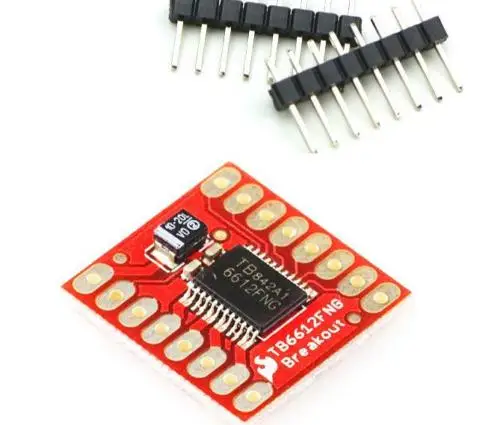
TB6612FNG (308k pdf) — это отличный драйвер для двух двигателей, который идеально подходит для сопряжения двух небольших двигателей постоянного тока, таких как наша микрометаллическая шестерня. к микроконтроллеру, и он также может использоваться для управления одним биполярным шаговым двигателем. H-мосты на основе MOSFET гораздо более эффективны, чем H-мосты на основе BJT, используемые в более старых драйверах, таких как L298N и Sanyo LB1836M, что позволяет подавать на двигатели больший ток и меньше потреблять от источника логики. (LB1836 по-прежнему превосходит TB6612 для действительно низковольтных приложений). Наша небольшая коммутационная плата дает вам прямой доступ ко всем функциям TB6612FNG, а также добавляет конденсаторы питания и защиту от переполюсовки батареи в цепи питания двигателя (примечание: защита от переполюсовки на соединении Vcc отсутствует).
к микроконтроллеру, и он также может использоваться для управления одним биполярным шаговым двигателем. H-мосты на основе MOSFET гораздо более эффективны, чем H-мосты на основе BJT, используемые в более старых драйверах, таких как L298N и Sanyo LB1836M, что позволяет подавать на двигатели больший ток и меньше потреблять от источника логики. (LB1836 по-прежнему превосходит TB6612 для действительно низковольтных приложений). Наша небольшая коммутационная плата дает вам прямой доступ ко всем функциям TB6612FNG, а также добавляет конденсаторы питания и защиту от переполюсовки батареи в цепи питания двигателя (примечание: защита от переполюсовки на соединении Vcc отсутствует).
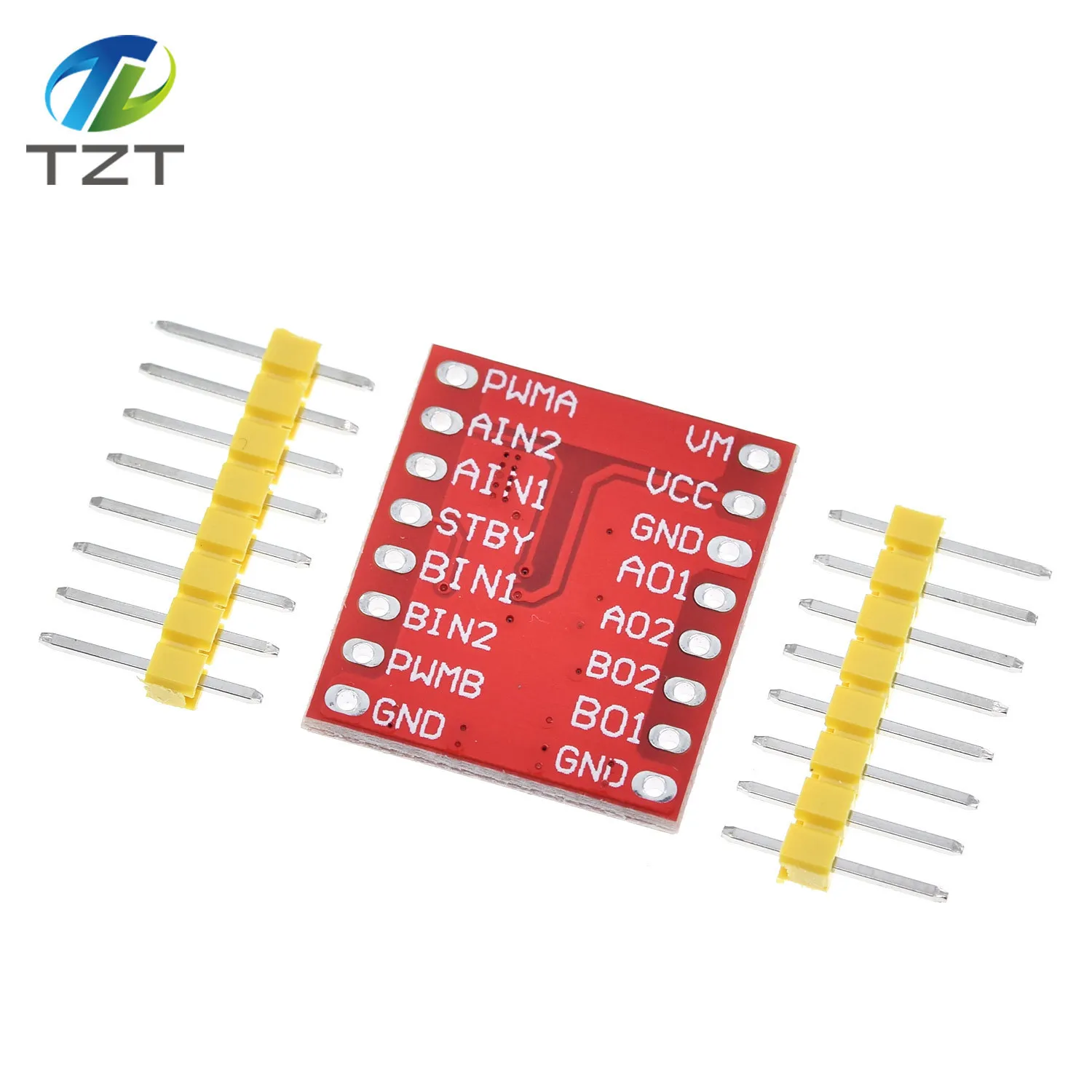
В типичном приложении силовые соединения выполняются на одной стороне платы, а управляющие — на другой. Все управляющие входы имеют внутренний низкий уровень. Каждый из двух каналов двигателя имеет два контакта управления направлением и контакт управления скоростью, который принимает вход ШИМ с частотой до 100 кГц.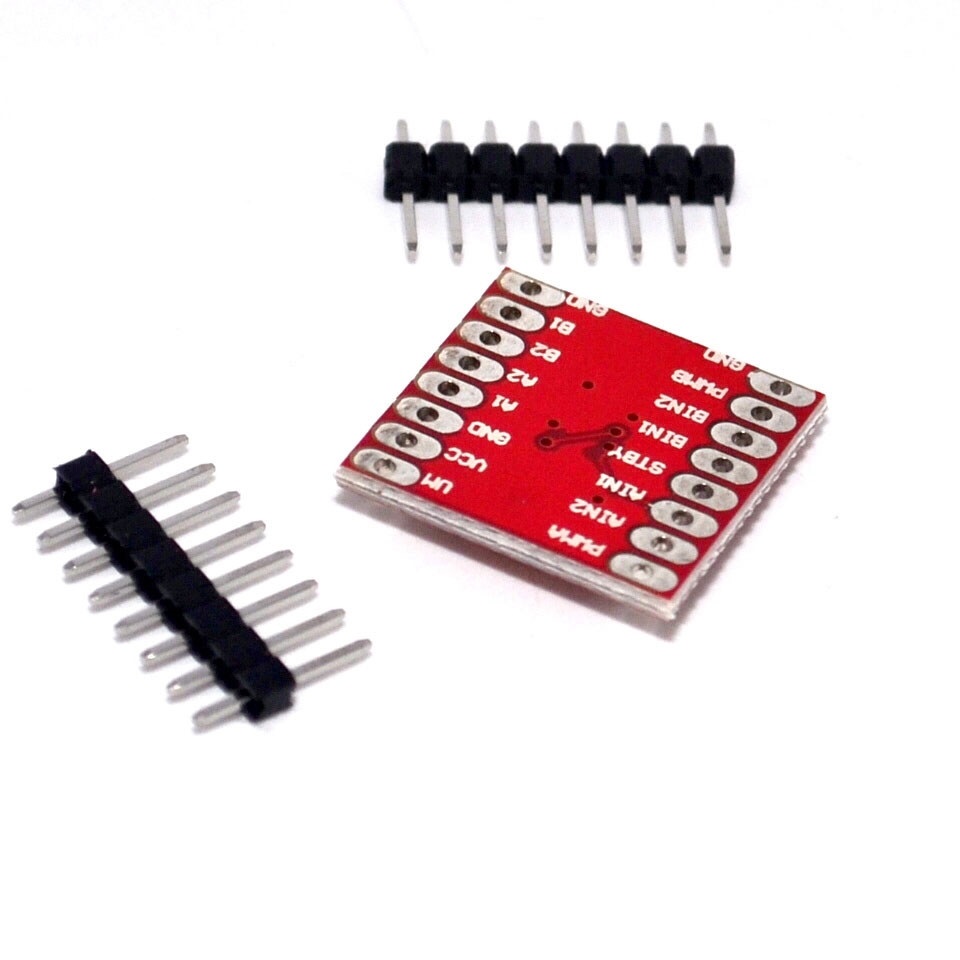 На вывод STBY должен быть подан высокий уровень, чтобы вывести драйвер из режима ожидания.
На вывод STBY должен быть подан высокий уровень, чтобы вывести драйвер из режима ожидания.
| Держатель двухмоторного драйвера TB6612FNG на макетной плате. |
|---|
Расстояние между рядами разъемов на печатной плате на 0,1 дюйма меньше, чем в стандартном 0,6-дюймовом DIP-корпусе (например, Baby Orangutan), но расстояние между контактами позволяет удобно разместить его в 0,1-дюймовых макетных и перфорационных платах.
Для более продвинутого контроллера мотора на основе этого драйвера рассмотрите контроллер мотора с двумя последовательными портами qik 2s9v1 Для контроллера робота на основе этого драйвера рассмотрите робота Baby Orangutan, Orangutan SV-328, Orangutan SVP-1284 и 3pi. которые подключают TB6612 к программируемому пользователем микроконтроллеру AVR.Для аналогичного драйвера двигателя, который легко использовать с Arduinos, рассмотрите наш шилд драйвера двойного двигателя DRV8835, а для аналогичного драйвера двигателя с гораздо более высоким максимальным рабочим напряжением рассмотрите наш A4990 двухмоторный водительский носитель.
Характеристики и характеристики
- Драйвер двигателя с двойным H-мостом: может управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем
- Рекомендуемое напряжение двигателя (VMOT): от 4,5 В до 13,5 В (может работать при напряжении до 2,5 В со сниженными характеристиками)
- Логическое напряжение (VCC): от 2,7 В до 5,5 В
- Максимальный выходной ток: 3 А на канал
- Непрерывный выходной ток: 1 А на канал (может быть включен параллельно для обеспечения непрерывного тока 2 А)
- Максимальная частота ШИМ: 100 кГц
- Встроенная схема отключения при перегреве
- Фильтрующие конденсаторы на обеих линиях питания
- Защита от обратного питания двигателя
Фактическое рассеивание мощности
Драйвер двигателя TB6612, используемый на несущей плате, имеет пиковый номинальный ток 3 А на канал. Пиковые значения предназначены для быстрых переходных процессов (например, при первом включении двигателя), а непрерывный номинал 1 А зависит от различных условий, таких как температура окружающей среды.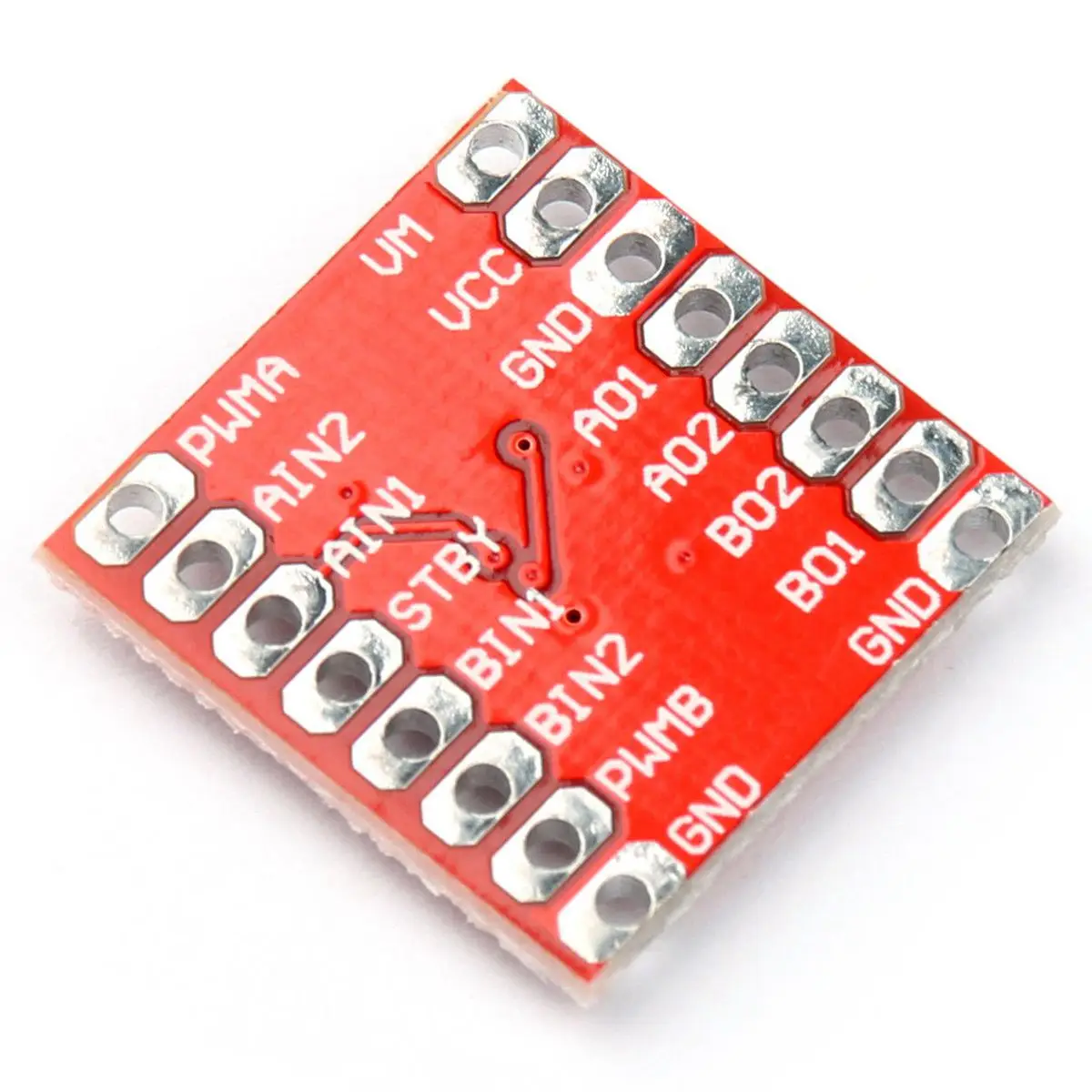 Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхемы драйвера двигателя, но производительность можно улучшить, добавив радиатор.
Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхемы драйвера двигателя, но производительность можно улучшить, добавив радиатор.
Этот продукт может нагреть достаточно, чтобы обжечь вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Аппаратные средства в комплекте
1×16-контактная отламывающаяся 0,1-дюймовая вилка входит в комплект поставки драйвера двигателя TB6612FNG. Эта полоса может быть дополнительно припаяна к несущей плате, чтобы ее можно было использовать с перфорированными платами, макетными платами без пайки или 0,1-дюймовыми гнездовыми разъемами. (Коллекторы могут поставляться как две части 1×8 или как одна часть 1×16, которую можно разломить пополам.)
Принципиальная схема
Эта схема также доступна для скачивания в формате pdf (85k pdf).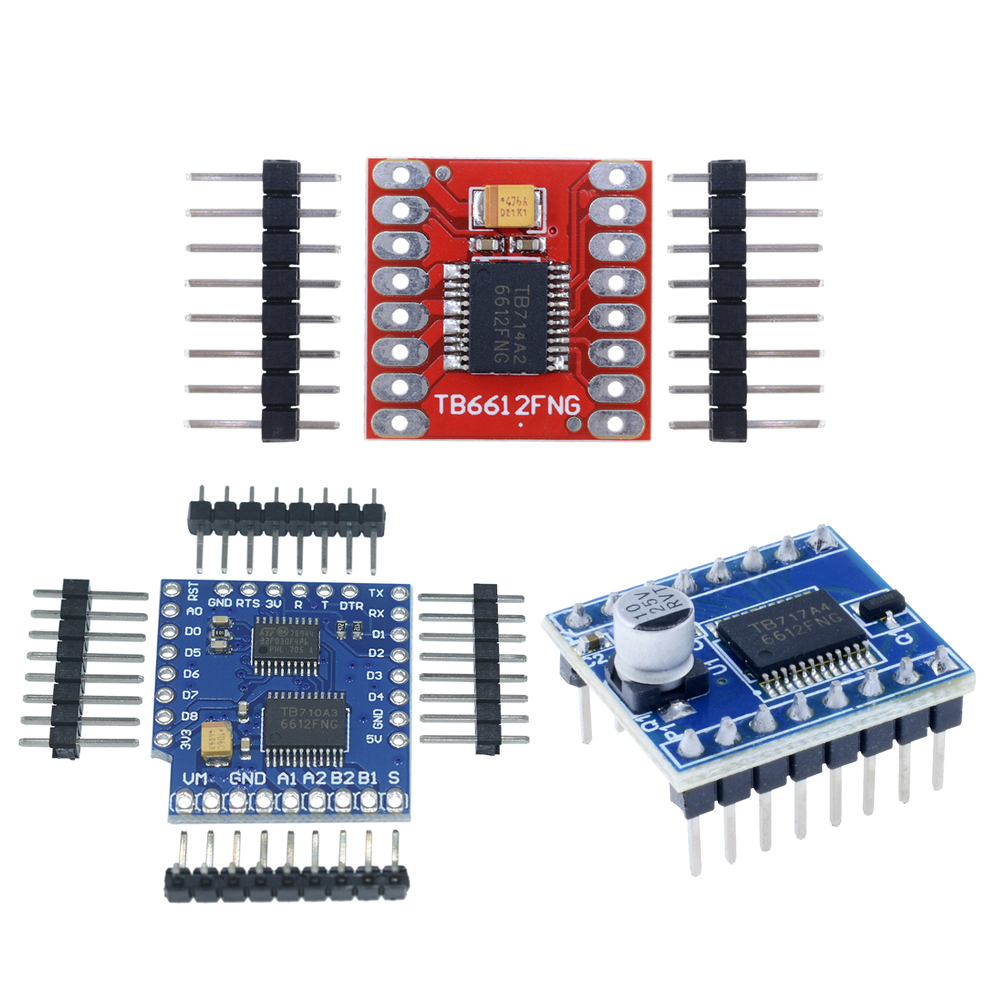
Этот товар часто покупают вместе с:
| Шариковый ролик Pololu с металлическим шариком 3/8″ |
| Массив датчиков отражения QTR-8A |
| Pololu Micro Metal Кронштейн для мотор-редуктора — Черный |
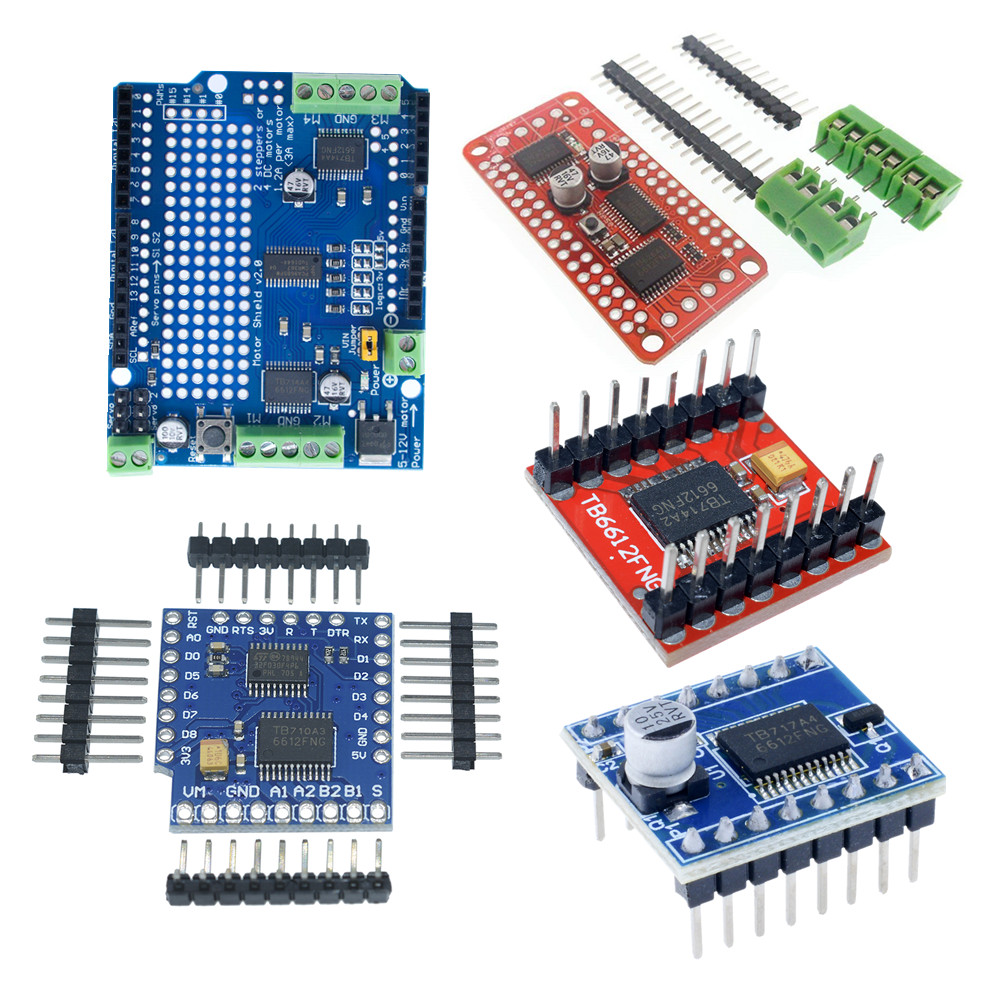
TB6612FNG: Двойной привод двигателя постоянного тока + DoRobot | от J3 | Jungletronics
Драйвер двигателя SparkFun — 3,2 А при 13,5 В пик — Ardu-Serie#49
Опубликовано в·
7 мин чтения·
3 ноября 201 8Эта крошечная доска — простой способ используйте драйвер двойного двигателя Toshiba TB6612FNG , который может независимо управлять двумя двунаправленными двигателями постоянного тока или одним биполярным шаговым двигателем 9двигатель 0064.
Цель данного поста В этом руководстве рассматривается драйвер двигателя TB6612FNG, который имеет диапазон питания от 2,5 В до 13,5 В и поддерживает 90 141 1,2 А постоянного тока и Пиковый ток 3,2 А (на канал), поэтому он может хорошо работать с нашими двигателями постоянного тока J3 Caterpillar-Crawler-Chassis v 1.TB6612FNG SparkFun Breakout0 (см.0142 :)
Драйвер двигателя TB6612FNG может управлять двумя двигателями постоянного тока (до ) при постоянном токе 1,2 А ( 3,2 А пик ). Два входных сигнала (IN1 и IN2) могут использоваться для управления двигателем в одном из четырех режимов функции : по часовой стрелке, против часовой стрелки, короткий тормоз и стоп. два выхода двигателя (A и B) могут управляться отдельно, а скорость каждого двигателя регулируется с помощью ШИМ входной сигнал с частотой до 100кГц . Штифт STBY следует вытянуть на вверх , чтобы вывести двигатель из режима ожидания.
- Драйвер двигателя с двойным Н-мостом: может управлять двумя двигателями постоянного тока или одним биполярным шаговым двигателем
- Рекомендуемое напряжение двигателя (VMOT): от 4,5 В до 13,5 В (может работать при напряжении до 2,5 В со снижением номинальной производительности)
- Логическое напряжение (VCC): от 2,7 В до 5,5 В
- Максимальный выходной ток: 3 А на канал
- Выходной ток, непрерывный: 1 А на канал (может быть включен параллельно для обеспечения непрерывного тока 2 А)
- Максимальная частота ШИМ: 100 кГц
- Встроенная схема отключения при перегреве
- Фильтрующие конденсаторы на обеих линиях питания
- Защита от обратного тока питания двигателя
 Конечно, двигатель будет тянуть более 40 мА
Конечно, двигатель будет тянуть более 40 мА тока и может испортить микросхему Arduino !]
TB6612FNG — это отличный драйвер для двух двигателей, который идеально подходит для сопряжения двух небольших двигателей постоянного тока, таких как микромоторы с металлическим редуктором Pololu, с микроконтроллером, а также может использоваться для управления одним биполярным шаговым двигателем.
Что мне больше всего понравилось в этой плате, так это то, что контакты расположены так, что входные контакты находятся на одной стороне, а выходные — на другой. Прохладный!
Что мне меньше всего понравилось в этой доске, так это то, что шелк находится внизу. Мы должны отметить контакты на отдельной бумаге или, как только нам нужно идентифицировать контакты, мы должны удалить плату из перфорированной платы. Привередливая вещь! Не делай этого! получить эту доску от Sparkfun. У него шелк на лице 🙂 Это конкурентный дифференциал! (Благодаря экспертному персоналу Sparkfun)
Н-мосты на основе полевых МОП-транзисторов намного эффективнее, чем Н-мосты на основе биполярных транзисторов, используемые в более старых драйверах, таких как L298N и Sanyo LB1836M, что позволяет подавать на двигатели больший ток и меньше потреблять от питание логики (у LB1836 все еще есть бит TB6612 для действительно низковольтных приложений).
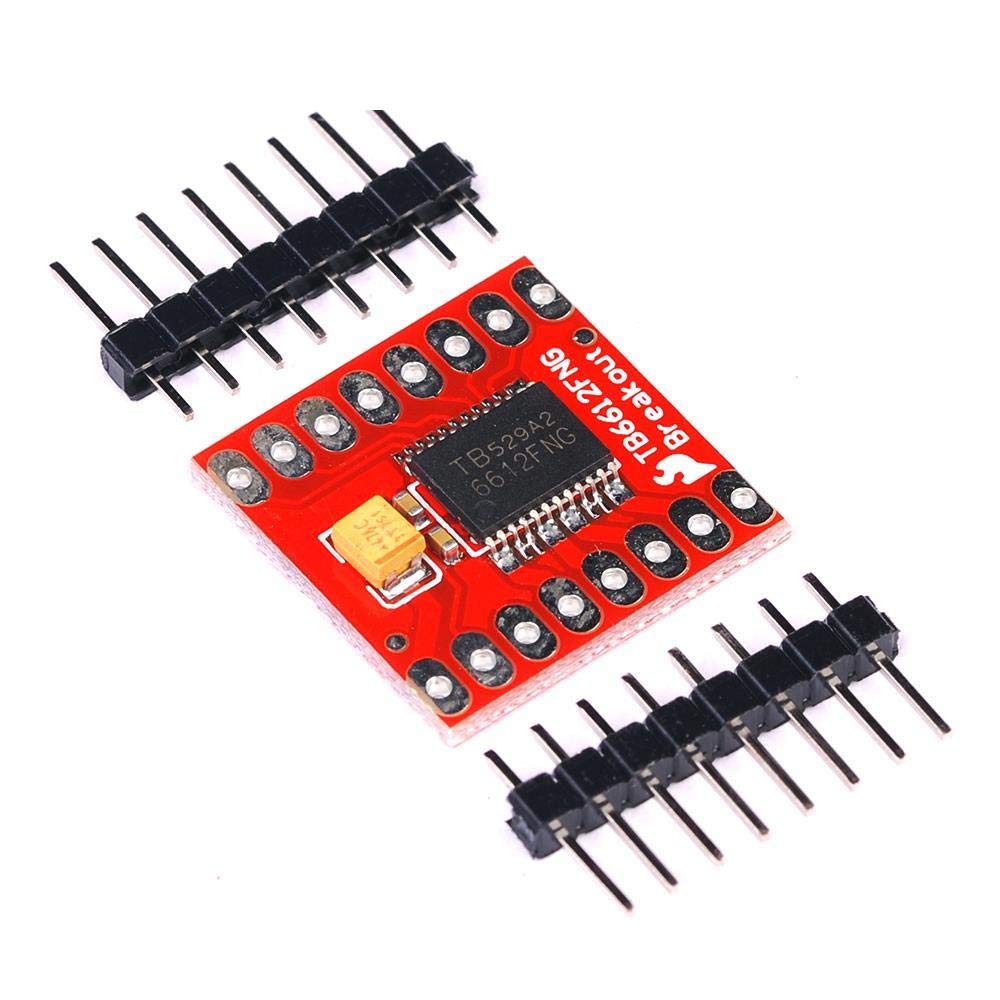
Эта небольшая коммутационная плата дает вам прямой доступ ко всем функциям TB6612FNG, а также добавляет конденсаторы питания и защиту от переполюсовки батареи на питании двигателя (примечание: защита от переполюсовки на соединении Vcc отсутствует).
В типичном приложении силовые соединения выполняются на одной стороне платы, а управляющие — на другой. Все управляющие входы имеют внутренний низкий уровень. Каждый из двух каналов двигателя имеет два контакта управления направлением и контакт управления скоростью, который принимает вход ШИМ с частотой до 100 кГц. На вывод STBY должен быть подан высокий уровень, чтобы вывести драйвер из режима ожидания.
Напряжение питания логики (VCC) может находиться в диапазоне 2,7–5,5 В постоянного тока, в то время как напряжение питания двигателя (VM) ограничено максимальным напряжением 15 В постоянного тока. Выходной ток рассчитан до 1,2 А на канал (или до 3,2 А для короткого одиночного импульса).
Этот маленький драйвер я купил в свободной продаже и он имеет китайское происхождение. Тем не менее, я рекомендую вам покупать напрямую у Sparkfun.
Тем не менее, я рекомендую вам покупать напрямую у Sparkfun.
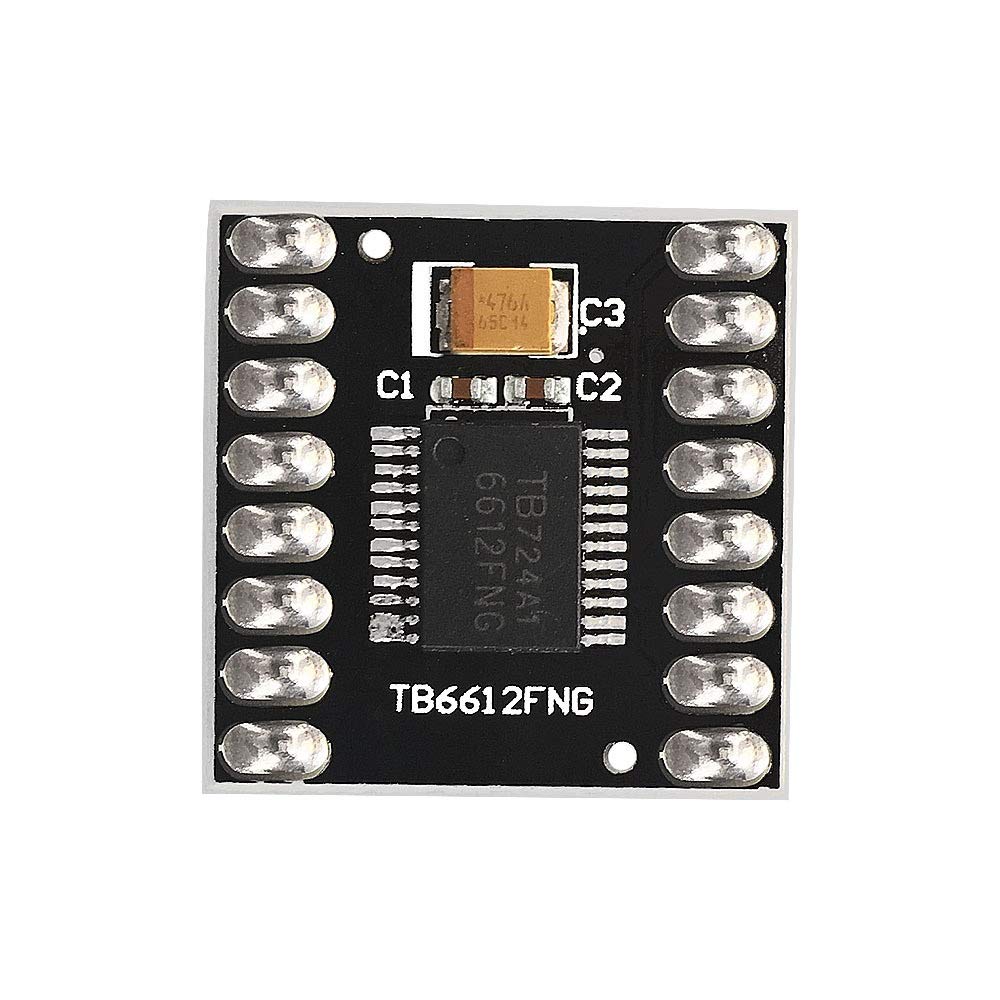
Эта маленькая плата поставляется с развязывающими конденсаторами на обеих линиях питания. Все контакты TB6612FNG разбиты на два разъема с шагом 0,1 дюйма — давайте припаяем контакты — контакты расположены таким образом, что входные контакты находятся на одной стороне, а выходные — на другой.
Давайте обсудим распиновку для Прорыв TB6612FNG.У нас в основном три типа контактов: мощность , вход и выход , и все они помечены на обратной стороне платы.
Пункты , которые следует помнить при обращении с ИС (из технического описания):
(1) Цепь отключения при перегреве Цепи отключения при перегреве не обязательно защищают ИС при любых обстоятельствах. Если схемы теплового отключения срабатывают при перегреве, немедленно сбросьте статус тепловыделения. В зависимости от метода использования и условий использования, например, превышение абсолютных максимальных значений может привести к неправильной работе схемы теплового отключения или выходу из строя микросхемы перед срабатыванием;
(2) Расчет теплового излучения При использовании ИС с большим током, например усилителя мощности, регулятора или драйвера, проектируйте устройство таким образом, чтобы тепло излучалось должным образом, не превышая указанную температуру перехода (ТДж) при любое время и состояние.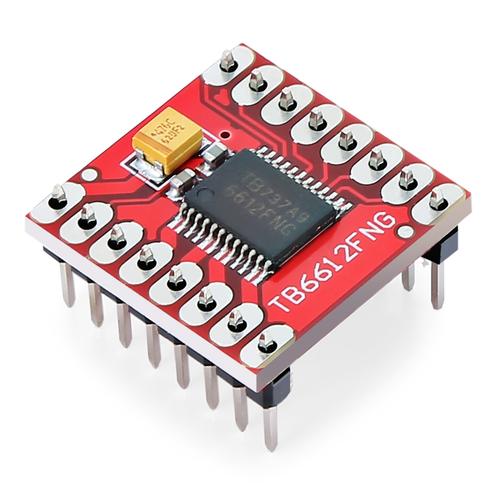 Эти микросхемы выделяют тепло даже при обычном использовании. Несоответствующая конструкция теплового излучения ИС может привести к сокращению срока службы ИС, ухудшению характеристик ИС или поломке ИС. Кроме того, при проектировании устройства следует учитывать влияние теплового излучения ИС на периферийные компоненты;
Эти микросхемы выделяют тепло даже при обычном использовании. Несоответствующая конструкция теплового излучения ИС может привести к сокращению срока службы ИС, ухудшению характеристик ИС или поломке ИС. Кроме того, при проектировании устройства следует учитывать влияние теплового излучения ИС на периферийные компоненты;
(3) Противо-ЭДС Когда двигатель вращается в обратном направлении, резко останавливается или замедляется, ток течет обратно к источнику питания двигателя из-за эффекта противо-ЭДС. Если способность источника питания потреблять ток невелика, источник питания двигателя устройства и выходные контакты могут подвергаться воздействию условий, превышающих максимально допустимые значения. Чтобы избежать этой проблемы, учитывайте влияние противо-ЭДС при проектировании системы (ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА — Против противо-ЭДС — Как подготовить двигатель постоянного тока — Краткий совет — Ardu_Serie#50)
При этом у вас должны быть базовые знания, чтобы начать работу над вашим следующим проектом по перевозке автомобилей. Для получения дополнительной информации о драйвере двигателя TB6612FNG перейдите по ссылкам ниже:
Для получения дополнительной информации о драйвере двигателя TB6612FNG перейдите по ссылкам ниже:
- Sparkfun Руководство по подключению TB6612FNG
- Pololu TB6612FNG Двойной держатель привода двигателя
- Управление 2 двигателя с TB6612FNG + Arduino ( билдр )
- SparkFun Eagle Файлы
- TB6612FNG Спецификация
- SparkFun GitHub
- TB6612FNG Схема
- J3 Caterpillar-Crawler- Шасси v 1.0 — ArduSerie#46
Похожие сообщения:
Встречайте DoRobot — Методы сборки J3 Caterpillar-Crawler-Chassis v 1.0 — ArduSerie # 46
L 9100S — Игрушечный драйвер, простой в использовании — Игрушечный низковольтный мост, простой в использовании двигатель — .8A @ 12 В пик — Ardu_Serie # 47
E ASYDRIVER : 4-проводной драйвер шагового двигателя — Brian Schmalz Design на A3967 IC — Bi-Polar Motors — 0,75 А при пиковом токе 30 В — Легко использовать их! Ardu_Serie # 48
D RV8825 — Сильноточный драйвер шагового двигателя — Шаговый двигатель — биполярный режим — 2,5 А при 45 В пик.
