Как работают современные термостабилизаторы на микроконтроллерах. Какие преимущества они дают по сравнению с аналоговыми схемами. Как правильно выбрать и настроить термостабилизатор для конкретной задачи. Какие режимы энергосбережения используются в микроконтроллерах термостабилизаторов.
Принципы работы термостабилизаторов на микроконтроллерах
Термостабилизаторы на микроконтроллерах представляют собой современное решение для точного поддержания заданной температуры в различных устройствах и системах. В отличие от аналоговых схем, микроконтроллеры позволяют реализовать более сложные алгоритмы управления и обеспечить высокую точность регулирования.
Основные компоненты термостабилизатора на микроконтроллере включают:
- Микроконтроллер — «мозг» системы, выполняющий алгоритм управления
- Датчик температуры — измеряет текущую температуру объекта
- Нагревательный элемент — обеспечивает нагрев при необходимости
- Силовой ключ — управляет включением/выключением нагревателя
- Источник питания — обеспечивает электропитание схемы
Принцип работы термостабилизатора на микроконтроллере заключается в следующем:

- Микроконтроллер считывает показания с датчика температуры
- Сравнивает текущую температуру с заданной
- При необходимости включает или выключает нагреватель через силовой ключ
- Процесс повторяется циклически для поддержания заданной температуры
Преимущества микроконтроллерных термостабилизаторов
Использование микроконтроллеров в термостабилизаторах дает ряд существенных преимуществ по сравнению с аналоговыми схемами:
- Высокая точность поддержания температуры (до 0.1°C)
- Возможность реализации сложных алгоритмов управления
- Простота настройки и изменения параметров
- Расширенная функциональность (таймеры, режимы работы и т.д.)
- Возможность подключения к компьютеру для мониторинга
- Низкое энергопотребление за счет спящих режимов
За счет этих преимуществ микроконтроллерные термостабилизаторы находят широкое применение в различных областях — от бытовой техники до промышленного оборудования.
Выбор микроконтроллера для термостабилизатора
При разработке термостабилизатора важно правильно подобрать микроконтроллер. Основные критерии выбора:

- Производительность — должна быть достаточной для реализации алгоритма
- Наличие АЦП для подключения датчика температуры
- Наличие ШИМ для управления нагревателем
- Низкое энергопотребление, особенно в спящих режимах
- Достаточный объем памяти программ и данных
- Наличие интерфейсов для связи (UART, SPI, I2C)
Для большинства применений подойдут 8-битные микроконтроллеры начального уровня, например:
- ATmega328P (Arduino)
- PIC16F1xxx
- STM8S
Для более сложных систем с высокими требованиями к точности регулирования можно использовать 32-битные микроконтроллеры на базе ARM Cortex-M.
Алгоритмы управления в термостабилизаторах
Микроконтроллер позволяет реализовать различные алгоритмы управления температурой. Наиболее распространенные:
Двухпозиционное регулирование (on-off)
Самый простой алгоритм — нагреватель включается при температуре ниже заданной и выключается при превышении. Недостаток — колебания температуры.
ПИД-регулирование
Более сложный алгоритм, учитывающий не только текущую ошибку, но и ее интеграл и производную. Обеспечивает высокую точность, но требует настройки коэффициентов.

Fuzzy-логика
Алгоритм на основе нечеткой логики позволяет учесть различные факторы и обеспечить плавное управление. Сложен в реализации, но дает хорошие результаты.
Выбор конкретного алгоритма зависит от требований к точности и особенностей объекта регулирования.
Энергосбережение в микроконтроллерных термостабилизаторах
Важной задачей при разработке термостабилизаторов является снижение энергопотребления, особенно для автономных устройств. Современные микроконтроллеры предоставляют различные возможности для экономии энергии:
Спящие режимы
В перерывах между измерениями и управлением микроконтроллер может переходить в режим сна с минимальным потреблением. Различают несколько уровней сна:
- Idle — отключение ЦПУ при работе периферии
- Power-down — отключение большинства систем кроме RTC
- Standby — полное отключение с сохранением содержимого RAM
Динамическое изменение частоты
Снижение тактовой частоты в периоды низкой нагрузки позволяет существенно уменьшить энергопотребление. Многие микроконтроллеры поддерживают динамическое переключение частоты.
Оптимизация кода
Грамотное написание программы с минимизацией числа инструкций и использованием аппаратных возможностей микроконтроллера также способствует снижению энергопотребления.
Комбинация этих методов позволяет создавать энергоэффективные термостабилизаторы с длительным временем автономной работы.
Практическое применение термостабилизаторов на микроконтроллерах
Термостабилизаторы на базе микроконтроллеров находят широкое применение в различных областях:
- Бытовая техника (холодильники, обогреватели)
- Медицинское оборудование (инкубаторы, анализаторы)
- Промышленные системы (термостаты, печи)
- Сельское хозяйство (теплицы, инкубаторы)
- Научные приборы (калориметры, термостаты)
Рассмотрим несколько конкретных примеров использования микроконтроллерных термостабилизаторов:
Инкубатор для яиц
Точное поддержание температуры критично для успешного выведения птенцов. Микроконтроллер позволяет реализовать сложный алгоритм с учетом влажности и периодического охлаждения яиц.
Термостат для аквариума
Микроконтроллерный термостабилизатор обеспечивает комфортные условия для рыб, поддерживая заданную температуру воды с высокой точностью.
Система обогрева теплицы
Управление температурой в теплице требует учета множества факторов — наружной температуры, влажности, освещенности. Микроконтроллер позволяет реализовать сложный алгоритм для создания оптимального микроклимата.
Настройка и калибровка термостабилизаторов
Важным этапом при разработке и внедрении термостабилизатора является его настройка и калибровка. Основные шаги:
- Калибровка датчика температуры для обеспечения точных измерений
- Настройка параметров алгоритма управления (коэффициенты ПИД-регулятора)
- Установка диапазона регулирования и гистерезиса
- Программирование дополнительных функций (таймеры, режимы работы)
- Тестирование системы в различных условиях
Правильная настройка позволяет добиться максимальной эффективности термостабилизатора в конкретных условиях применения.
Перспективы развития термостабилизаторов на микроконтроллерах
Технологии микроконтроллеров постоянно развиваются, открывая новые возможности для совершенствования термостабилизаторов:
- Повышение точности регулирования за счет более совершенных алгоритмов
- Снижение энергопотребления благодаря новым технологиям производства микросхем
- Расширение функциональности (беспроводное управление, интеграция в «умный дом»)
- Удешевление систем за счет развития технологий производства
Можно ожидать, что в ближайшие годы микроконтроллерные термостабилизаторы будут становиться все более доступными и эффективными, находя применение в самых разных областях.

Термостабилизатор — RadioRadar
Автору довелось ремонтировать подогреватель детского питания, блок управления которого был собран на микроконтроллере на многослойной печатной плате. Напряжение питания присутствовало, но ничего не управлялось, многочисленные светодиоды не светились. Решено было сделать плату управления заново, без микроконтроллера, на доступных элементах.
Схема разработанного термостабилизатора приведена на рис. 1. В устройстве использован нагреватель от ремонтируемой конструкции. Источник питания, как и в оригинале, собран по схеме с балластным конденсатором С1. Указанная на схеме ёмкость конденсатора обеспечивает выходной ток 42 мА при номинальном напряжении сети и выходном напряжении 12 В [1]. Светодиод HL2 индицирует наличие питающего напряжения. На схеме не показаны цепи защиты от перегрева, сохранённые от ремонтируемой конструкции.
Рис. 1. Схема термостабилизатора
Датчик температуры RK1 — терморезистор из ремонтируемого устройства с отрицательным температурным коэффициентом и сопротивлением 100 кОм при комнатной температуре и около 50 кОм при температуре 40 оС. Терморезистор питается от стабилизатора напряжения 5 В на микросхеме DA1 через резисторы R3 и R4, конденсатор С3 служит для снижения наводок от сети 230 В.
Терморезистор питается от стабилизатора напряжения 5 В на микросхеме DA1 через резисторы R3 и R4, конденсатор С3 служит для снижения наводок от сети 230 В.
Несколько нетрадиционен пороговый элемент, собранный на микросхеме TL431 (отечественный аналог — КР142ЕН19А), называемой «регулируемый стабилитрон» [2]. Основное её свойство заключается в том, что при напряжении на входе (вывод 1) менее 2,5 В выходной ток, протекающий через микросхему (через выводы 2 и 3), не превышает 1 мА, а при достижении этого значения резко увеличивается. Ток менее 1 мА создаёт падение напряжения на резисторе R6 менее 330 мВ, которое недостаточно для включения транзистора VT1, открывающегося, как и все кремниевые биполярные транзисторы, при напряжении база-эмиттер в пределах 500…600 мВ.
Если температура датчика RK1 ниже значения, заданного движком подстроечного резистора R3, и его сопротивление больше суммы сопротивлений резисторов R3 и R4, напряжение на выводе 1 DA2 превышает 2,5 В. Ток через микросхему DA2 создаёт на резисторе R6 падение напряжения, достаточное для открывания транзистора VT1. Коллекторный ток VT1 включает реле К1, которое замыкает свои контакты К1.1 и подаёт входное сетевое напряжение на нагреватель. При этом включается светодиод HL1. Резистор R7 ограничивает ток через микросхему DA2 и базу транзистора VT1.
Коллекторный ток VT1 включает реле К1, которое замыкает свои контакты К1.1 и подаёт входное сетевое напряжение на нагреватель. При этом включается светодиод HL1. Резистор R7 ограничивает ток через микросхему DA2 и базу транзистора VT1.
Когда температура датчика превысит заданное значение, его сопротивление уменьшится до значения, меньшего суммы сопротивлений резисторов R3 и R4, транзистор и реле выключатся. Резистор R5 обеспечивает небольшую положительную обратную связь, что создаёт условия для чёткого скачкообразного переключения микросхемы DA2, транзистора и реле.
Таким образом, включением и выключением нагревателя будет поддерживаться постоянная температура в месте установки термодатчика. Подстроечным резистором R3 можно установить температуру стабилизации в пределах 20…50 оС.
В устройстве применены реле SRD-12VDC-SL-C с рабочим напряжением 12 В и сопротивлением обмотки 400 Ом, ультраяркие светодиоды диаметром 3 мм зелёного (HL1) и красного (HL2) свечения. Резисторы R8 и R9 желательно подобрать такого сопротивления (не менее 5,1 кОм), чтобы зрительно яркость свечения светодиодов была примерно одинаковой. Конденсатор С1 — К73-17 на номинальное напряжение 400 В, но лучше здесь применить импортный аналог конденсатора К73-17 на номинальное напряжение 630 В, С2 и С3 — импортные аналоги К50-35. Подстроечный резистор R3 — СП3-19а, резистор R5 — КИМ, остальные — МЛТ, С2-23, С2-33 указанной на схеме мощности. Диодный мост VD1 — любой на номинальное обратное напряжение не менее 50 В и прямой ток не менее 0,5 А. Стабилитрон VD2 — на напряжение 12 В и рассеиваемую мощность не менее 0,5 Вт, диод VD3 — любой кремниевый маломощный. Транзистор VT1 — кремниевый структуры p-n-p с коэффициентом передачи токабазы не менее 50 при коллекторном токе 30 мА. Микросхема 78L05 (DA1) заменима на КР1157ЕН5, TL431 (DA2) — на КР142ЕН19.
Резисторы R8 и R9 желательно подобрать такого сопротивления (не менее 5,1 кОм), чтобы зрительно яркость свечения светодиодов была примерно одинаковой. Конденсатор С1 — К73-17 на номинальное напряжение 400 В, но лучше здесь применить импортный аналог конденсатора К73-17 на номинальное напряжение 630 В, С2 и С3 — импортные аналоги К50-35. Подстроечный резистор R3 — СП3-19а, резистор R5 — КИМ, остальные — МЛТ, С2-23, С2-33 указанной на схеме мощности. Диодный мост VD1 — любой на номинальное обратное напряжение не менее 50 В и прямой ток не менее 0,5 А. Стабилитрон VD2 — на напряжение 12 В и рассеиваемую мощность не менее 0,5 Вт, диод VD3 — любой кремниевый маломощный. Транзистор VT1 — кремниевый структуры p-n-p с коэффициентом передачи токабазы не менее 50 при коллекторном токе 30 мА. Микросхема 78L05 (DA1) заменима на КР1157ЕН5, TL431 (DA2) — на КР142ЕН19.
Терморезистор RK1 может быть любым с подходящим конструктивным оформлением, отрицательным температурным коэффициентом и при температуре 20 оС иметь сопротивление от 27 до 100 кОм. Соответственно, сумма сопротивлений резисторов R3 и R4 должна быть примерно равна сопротивлению терморезистора при комнатной температуре, а резистора R5 — в 300…500 раз больше. Если термостабилизатор предполагается использовать для других целей, сопротивление каждого из резисторов R3 и R4 должно быть равно примерно 70…80 % от сопротивления терморезистора при стабилизируемой температуре.
Соответственно, сумма сопротивлений резисторов R3 и R4 должна быть примерно равна сопротивлению терморезистора при комнатной температуре, а резистора R5 — в 300…500 раз больше. Если термостабилизатор предполагается использовать для других целей, сопротивление каждого из резисторов R3 и R4 должно быть равно примерно 70…80 % от сопротивления терморезистора при стабилизируемой температуре.
Практически все элементы устройства смонтированы на печатной плате из фольгированного с одной стороны стеклотекстолита толщиной 1,5 мм. Чертёж платы приведён на рис. 2. На плате со стороны печатных проводников необходимо припаять три перемычки из изолированного провода. На виде расположения деталей они показаны штриховыми линиями. Фото собранной платы, установленной на переднюю панель нагревателя, показано на рис. 3. Несколько неравномерная плотность установки радиоэлементов на плате объясняется особенностями конструкции нагревателя.
Рис. 2. Плата устройства и элементы на ней
Рис. 3. Внешний вид собранной платы
3. Внешний вид собранной платы
Поскольку все цепи устройства гальванически связаны с сетью, проверку собранной платы следует производить от источника постоянного тока, подключив его через миллиамперметр к сетевым контактам платы в произвольной полярности, предварительно замкнув выводы конденсатора С1. Терморезистор RK1 должен иметь комнатную температуру, а движок под-строечного резистора R3 установлен в положение минимального сопротивления. Плавно увеличивая от 10 В напряжение источника питания, необходимо добиться потребляемого тока 40 мА. Реле К1 должно включиться, оба светодиода — светиться.
После этого измеряют напряжение на стабилитроне VD2 и выводе 1 микросхемы DA1, оно должно быть 12±0,5 В и 5±0,25 В соответственно.
Нагревая терморезистор до требуемой стабилизируемой температуры (можно вложить его в согнутую пополам пластиковую трубку и опустить эту трубку в воду с необходимой температурой) и вращая движок подстроечного резистора R3, добиваются выключения реле, что будет заметно по щелчку и погасанию светодиода HL1. Перемещая движок вперёд-назад, устанавливают его в положение, среднее между включением и выключением светодиода.
Перемещая движок вперёд-назад, устанавливают его в положение, среднее между включением и выключением светодиода.
Далее, сняв перемычку с конденсатора С1 и полностью собрав подогреватель, проверяют его работоспособность при работе от сети.
Литература
1. Бирюков С. Блоки питания с балластным конденсатором. — Схемотехника, 2004, № 6, с. 28, 29.
2. Нечаев И. Необычное применение микросхемы КР142ЕН19А. — Радио, 2003, № 5, с. 53, 54.
Автор: С. Бирюков, г. Москва
Электронный термометр с беспроводным датчиком | RadioLaba.ru
Решил я сделать двухканальный термометр, только не обычный, а с беспроводным датчиком для улицы. Идея конечно не новая, на рынке уже имеются подобные термометры промышленного производства. Так как у меня были наработки по подключению радиомодулей к микроконтроллеру, я начал разрабатывать свой вариант беспроводного термометра.
Для измерения температуры я использовал распространенные датчики DS18B20, для отображения показаний применил не менее популярный ЖК дисплей Nokia 5110. Радиомодули и алгоритм передачи данных я рассматривал ранее в статье про передатчик и приемник на 433 МГц
Радиомодули и алгоритм передачи данных я рассматривал ранее в статье про передатчик и приемник на 433 МГц
Ниже представлена схема беспроводного датчика на микроконтроллере PIC12F675.
После подачи питания микроконтроллер считывает значение температуры с датчика BK1 и отправляет эти данные на радиопередатчик A1, после чего происходит переход в спящий режим. Пробуждение микроконтроллера происходит по прерыванию, которое генерируется изменением уровня на линии GP0. К этой линии подключена RC цепочка на элементах R2 и C4, которая выполняют функцию таймера. При выходе из спящего режима на линии GP0 устанавливается низкий логический уровень, тем самым конденсатор C4 разряжается. Перед уходом в “сон” линия настраивается на вход, конденсатор начинает заряжаться через резистор R4, при достижении порогового напряжения (около 1,2В) происходит прерывание и пробуждение микроконтроллера. При указанных на схеме номиналах R2, C4 период пробуждения составляет примерно 5 минут. Установив перемычку JP1, можно сократить период до 5,5 секунд. Путем подбора конденсатора и резистора можно настраивать желаемое время периода, но при этом надо учитывать ток заряда конденсатора, в плане энергопотребления.
Путем подбора конденсатора и резистора можно настраивать желаемое время периода, но при этом надо учитывать ток заряда конденсатора, в плане энергопотребления.
Значение температуры по радиоканалу передается в виде пакета из 3-х байт, последний байт представляет собой контрольную сумму первых 2-х байт. Алгоритм передачи данных, который я использую, в принципе позволяет обходиться без контрольной суммы, вероятность приема неправильных данных низкая. Скорость передачи составляет 3,3 Кбит/сек. Каждый раз после измерения температуры отсылается 3 пакета байтов, пауза между пакетами составляет 10 мс, такой вариант передачи я применил для увеличения надежности получения данных приемником. Это связано с тем, что приемная сторона прерывает прием сигнала на 4-5 мс, во время измерения температуры с внутреннего (домашнего) датчика.
В качестве питания используется батарея 6F22 на 9В (“Крона”), модуль радиопередатчика A1 питается напрямую от батареи. Для питания микроконтроллера используется микромощный стабилизатор напряжения DA1 (MCP1702) на 5В, собственный ток потребления стабилизатора составляет всего 1-2 мкА, максимальный ток нагрузки до 250 мА. Стабилизатор MCP1702 можно заменить на LP2950, ток потребления которого выше и составляет 75 мкА. Обычные стабилизаторы напряжения типа L78хх имеют большой ток потребления в несколько миллиампер, поэтому не годятся для аппаратуры с батарейным питанием. Ток потребления устройства в спящем режиме меняется с течением времени по мере заряда конденсатора С4, первые 2,5 минуты потребление составляет 10 мкА, последующие 2,5 минуты ток плавно увеличивается, до момента выхода из спящего режима. Данное явление возникает из-за наличия токов переключения входного буфера микроконтроллера.
Стабилизатор MCP1702 можно заменить на LP2950, ток потребления которого выше и составляет 75 мкА. Обычные стабилизаторы напряжения типа L78хх имеют большой ток потребления в несколько миллиампер, поэтому не годятся для аппаратуры с батарейным питанием. Ток потребления устройства в спящем режиме меняется с течением времени по мере заряда конденсатора С4, первые 2,5 минуты потребление составляет 10 мкА, последующие 2,5 минуты ток плавно увеличивается, до момента выхода из спящего режима. Данное явление возникает из-за наличия токов переключения входного буфера микроконтроллера.
Хочу отметить, что при низких температурах емкость батареек уменьшается быстрее, не все типы батареек можно использовать в таких условиях. Лучшими показателями при отрицательных температурах обладают литиевые батарейки, далее следуют Ni-Mh аккумуляторы, щелочные батарейки занимают третью позицию, солевые элементы не пригодны для таких условий.
Ниже представлена схема термометра на микроконтроллере PIC16F628A.
Дисплей HG1, датчик BK1 и микроконтроллер питаются напряжением 3,3В от стабилизатора DA2. Такое значение было выбрано в связи с характеристиками дисплея, максимальное напряжение питания которого составляет 3,3В, кроме этого отпадает необходимость в согласовании уровней напряжения между линиями ввода/вывода дисплея и микроконтроллера. Модуль приемника A1 питается от стабилизатора DA1, с выходным напряжением 5В. Резисторы R6, R7 установлены для согласования уровней напряжения.
Микроконтроллер DD1 считывает значение температуры с датчика BK1 каждые 2 секунды, параллельно принимает сигнал с приемника, при получении пакета байтов от передатчика вспыхивает светодиод HL1. В верхней части дисплея отображается надпись “Дом”, под которой выводится значение температуры с внутреннего (домашнего) датчика, ниже отображается надпись “Улица” и температура, полученная от беспроводного датчика. После приема данных по радиоканалу, микроконтроллер запускает таймер, который ведет отсчет времени для контроля получения данных. Если данные не были получены за период отсчета таймера, вместо показаний температуры, на дисплее высвечивается символы тире “- – – – -”. Время отсчета можно задать в пределах 1-15 минут с шагом в одну минуту. Для этого, перед программированием микроконтроллера, необходимо записать число от 1 до 15 в ячейку EEPROM с адресом 0x00. По умолчанию устанавливается период в 7 минут. При неисправности датчиков BK1, для обоих устройств, вместо значения соответствующей температуры, выводится надпись “ERROR”. Кнопка SB1 управляет подсветкой дисплея, по умолчанию подсветка включена. Кнопка SB2 предназначена для регулировки контрастности дисплея, так как у разных экземпляров она может отличаться.
Если данные не были получены за период отсчета таймера, вместо показаний температуры, на дисплее высвечивается символы тире “- – – – -”. Время отсчета можно задать в пределах 1-15 минут с шагом в одну минуту. Для этого, перед программированием микроконтроллера, необходимо записать число от 1 до 15 в ячейку EEPROM с адресом 0x00. По умолчанию устанавливается период в 7 минут. При неисправности датчиков BK1, для обоих устройств, вместо значения соответствующей температуры, выводится надпись “ERROR”. Кнопка SB1 управляет подсветкой дисплея, по умолчанию подсветка включена. Кнопка SB2 предназначена для регулировки контрастности дисплея, так как у разных экземпляров она может отличаться.
Для питания устройства подойдет нестабилизированный источник питания с выходным напряжением 8-12В. Оба устройства размещены в пластиковых корпусах. Антенна для радиомодулей выполнена в виде отрезка одножильного провода длиной 17 см (четверть длины волны несущей частоты).
ТЕРМОСТАБИЛИЗАТОР ДЛЯ ИНКУБАТОРА — АВТОМАТИКА — РАДИОЭЛЕКТРОНИКА — ТЕХНИЧЕСКИЕ CТАТЬИ
Эта схема была трижды повторена на заказ, и ни разу ни одной жалобы на ее работу не поступало. Не смотря на простоту, схема тем не менее обеспечивает точность поддержания температуры до ±0,1°С в диапазоне +34…42°С.
Не смотря на простоту, схема тем не менее обеспечивает точность поддержания температуры до ±0,1°С в диапазоне +34…42°С.Внимание! Схема имеет гальваническую связь с сетью! При сборке и наладке соблюдать повышенную осторожность! При эксплуатации ручка переменного резистора R3 должна иметь надежную изоляцию!
Диоды VD1 и VD2 — КД209 или иные с допустимым обратным напряжением не менее 400В и прямым током не менее 0,5А. Напряжение для конденсатора C1 указано действующее. Если неизвестно, какое напряжение указано в маркировке конденсатора, лучше брать на 350В, желательно применять тип МБМ или иной, допускающий работу на переменном токе. Транзистор VT1 — любой маломощный соответствующей проводимости с коэффициентом усиления не менее 100. Симистор VS1 может быть заменен на КУ208, однако мощность нагрузки и надежность в целом снизятся. Без теплоотвода указанный на схеме тиристор позволяет подключать нагрузку (лампа накаливания или нагревательный элемент) мощностью до 300 Вт. Микросхема DD1 может быть заменена без изменения схемы на К561ЛЕ5 или аналоги серии К564.
Резисторы R4 и R7 — необязательные. При их наличии точность поддержания снижается до ±0,5…0,8°С, однако происходит четкое включение и выключение нагревательного элемента (из-за гистерезиса схемы). Если R4 заменить закороткой, а от R7 отказаться — точность резко повышается, однако возможен «звонковый» режим переключения нагрузки (особенно заметно при использовании лампы накаливания). В принципе, для инкубатора это роли не играет.
Терморезистор R5 — так же любого типа, я применял КМТ. Устанавливается он так, чтобы не было его непосредственного нагрева от лампы или нагревателя. В инкубаторе желательно предусмотреть меры для обеспечения конвекции воздуха.
Градуировку шкалы резистора R3 необходимо выполнять по показаниям точного термометра (в крайнем случае — медицинского). Для упрощения процесса градуировки можно поместить R5 в емкость с трансформаторным (машинным) маслом, нагреваемую в горячей воде.
источник: arvresearch. nm.ru
nm.ru
Минимизация энергопотребления в микроконтроллерах
Так же, как газ (бензин / дизель) важен для передвижения велосипедов, грузовиков и автомобилей (да, кроме Tesla!), Электроэнергия важна для большинства электронных приложений и, более того, для встраиваемых систем. системные приложения, которые обычно работают от батарей (с ограниченным энергопотреблением), от обычных мобильных телефонов до умных домашних устройств.
Ограниченный характер заряда батареи подразумевает необходимость обеспечения того, чтобы уровень энергопотребления этих устройств был разумным, чтобы стимулировать их внедрение и использование.Особенно с устройствами на базе Интернета вещей, где можно ожидать, что устройство будет работать до 8-10 лет без подзарядки без замены батареи.
Эти тенденции привели к реализации соображений низкого энергопотребления при проектировании встраиваемых систем , и на протяжении многих лет проектировщики, инженеры и производители в разное время разрабатывали несколько интеллектуальных способов эффективного управления мощностью, потребляемой продуктами, чтобы гарантировать их долговечность. дольше без подзарядки.Многие из этих методов сосредоточены на микроконтроллере, который является сердцем большинства устройств. В сегодняшней статье мы рассмотрим некоторые из этих методов и то, как их можно использовать для минимизации энергопотребления микроконтроллеров. Хотя микропроцессор потребляет меньше энергии, но его можно использовать везде, где бы он ни находился, перейдите по ссылке, чтобы узнать, чем микропроцессор отличается от микроконтроллера.
дольше без подзарядки.Многие из этих методов сосредоточены на микроконтроллере, который является сердцем большинства устройств. В сегодняшней статье мы рассмотрим некоторые из этих методов и то, как их можно использовать для минимизации энергопотребления микроконтроллеров. Хотя микропроцессор потребляет меньше энергии, но его можно использовать везде, где бы он ни находился, перейдите по ссылке, чтобы узнать, чем микропроцессор отличается от микроконтроллера.
Методы энергосбережения для микроконтроллеров
1.Спящий режим
Спящие режимы (обычно называемые режимами с низким энергопотреблением), возможно, являются наиболее популярным методом снижения энергопотребления микроконтроллеров. Обычно они включают отключение определенных схем или часов, которые приводят в действие определенные периферийные устройства микроконтроллеров .
В зависимости от архитектуры и производителя микроконтроллеры обычно имеют разные виды спящих режимов, причем каждый режим обладает способностью отключать больше внутренних схем или периферийных устройств по сравнению с другим. Режимы сна обычно варьируются от глубокого сна или выключенного до режима ожидания и дремоты.
Режимы сна обычно варьируются от глубокого сна или выключенного до режима ожидания и дремоты.
Некоторые из доступных режимов описаны ниже . Следует отметить, что характеристики, а также название этих режимов могут отличаться от производителя к производителю.
я. Режим ожидания / сна
Обычно это самый простой из реализуемых разработчиками режимов пониженного энергопотребления. Этот режим позволяет микроконтроллеру вернуться к полной работе с очень высокой скоростью .Следовательно, это не лучший режим, если цикл питания устройства требует, чтобы оно очень часто выходило из спящего режима, так как при выходе микроконтроллера из спящего режима потребляется большое количество энергии. Возврат в активный режим из режима ожидания обычно происходит по прерыванию. Этот режим реализован на микроконтроллере путем отключения дерева тактовых импульсов, которое управляет схемой ЦП, в то время как первичные высокочастотные тактовые импульсы микроконтроллера продолжают работать. . При этом ЦП может возобновить работу сразу после активации триггера пробуждения.Стробирование тактовой частоты широко используется для отсечения сигналов в режимах с низким энергопотреблением для микроконтроллеров, и этот режим эффективно стробирует тактовые сигналы через ЦП.
. При этом ЦП может возобновить работу сразу после активации триггера пробуждения.Стробирование тактовой частоты широко используется для отсечения сигналов в режимах с низким энергопотреблением для микроконтроллеров, и этот режим эффективно стробирует тактовые сигналы через ЦП.
ii. Режим ожидания
Standby Mode — еще один режим с низким энергопотреблением, который легко реализовать разработчикам. Это очень похоже на режим ожидания / сна, поскольку он также включает использование стробирования часов в ЦП , но одно существенное отличие состоит в том, что он позволяет изменять содержимое оперативной памяти, что обычно не происходит в режиме ожидания / сна. .В режиме ожидания высокоскоростные периферийные устройства, такие как DMA (прямой доступ к памяти), последовательные порты, периферийные устройства ADC и AES, продолжают работать, чтобы обеспечить их доступность сразу после выхода ЦП из спящего режима. Для некоторых MCU RAM также остается активной и может быть доступна через DMA, что позволяет сохранять и получать данные без вмешательства CPU. Потребляемая мощность в этом режиме может составлять всего 50 мкА / МГц для микроконтроллеров малой мощности.
Потребляемая мощность в этом режиме может составлять всего 50 мкА / МГц для микроконтроллеров малой мощности.
iii. Режим глубокого сна
Режим глубокого сна, как правило, включает в себя отключение высокочастотных часов и других схем в микроконтроллере, оставляя только схему синхросигнала, используемую для управления критическими элементами, такими как сторожевой таймер, обнаружение отключения и схемы сброса при включении.Другие MCU могут добавлять к нему другие элементы для повышения общей эффективности. Потребляемая мощность в этом режиме может составлять всего 1 мкА в зависимости от конкретного MCU.
iv. Режим остановки / выключения
Некоторые микроконтроллеры имеют разные варианты этого дополнительного режима. В этом режиме как высокие, так и низкие генераторы обычно отключены, оставив включенными только некоторые регистры конфигурации и другие критические элементы.
Функции всех упомянутых выше спящих режимов отличаются от MCU к MCU, но общее практическое правило таково; чем глубже сон, тем больше периферийных устройств отключается во время сна и тем меньше потребляемая мощность, хотя обычно это также означает; тем больше энергии потребляется для восстановления системы.Таким образом, разработчик должен рассмотреть этот вариант и выбрать правильный MCU для задачи, не идя на компромиссы, влияющие на спецификацию системы.
2. Динамическое изменение частоты процессора
Это еще один широко распространенный метод эффективного снижения мощности, потребляемой микроконтроллером. Это, безусловно, самый старый метод и немного сложнее, чем режимы сна. Он включает в себя микропрограммное обеспечение, динамически управляющее тактовой частотой процессора, чередуя высокую и низкую частоту , так как соотношение между частотой процессора и количеством потребляемой мощности является линейным (как показано ниже).
Реализация этого метода обычно следует этому шаблону; когда система находится в состоянии ожидания, микропрограммное обеспечение устанавливает тактовую частоту на низкую скорость, позволяя устройству экономить энергию, а когда системе требуется выполнить тяжелые вычисления, тактовая частота восстанавливается.
Существуют контрпродуктивные сценарии изменения частоты процессора, которые обычно возникают в результате плохо разработанной прошивки. Такие сценарии возникают, когда тактовая частота поддерживается на низком уровне, пока система выполняет тяжелые вычисления.Низкая частота в этом сценарии означает, что системе потребуется больше времени, чем необходимо для выполнения поставленной задачи, и, таким образом, накопительно будет потребляться то же количество энергии, которое проектировщики пытались сэкономить. Таким образом, необходимо проявлять особую осторожность при реализации этого метода в критических по времени приложениях.
3. Структура микропрограммы обработчика прерываний
Структура микропрограммы обработчика прерываний
Это один из самых экстремальных методов управления питанием в микроконтроллерах .Это стало возможным благодаря нескольким микроконтроллерам, таким как ядра ARM Cortex-M, которые имеют бит ожидания при выходе в регистре SCR. Этот бит дает микроконтроллеру возможность засыпать после выполнения процедуры прерывания. Хотя существует ограничение на количество приложений, которые будут бесперебойно работать таким образом, это может быть очень полезным методом для полевых датчиков и других долгосрочных приложений, основанных на сборе данных.
Большинство из других техник, на мой взгляд, являются вариациями уже упомянутых выше .Например, метод выборочной периферийной синхронизации — это, по сути, разновидность спящих режимов, в которых разработчик выбирает периферийные устройства для включения или выключения. Этот метод требует глубоких знаний целевого микроконтроллера и может быть не очень удобен для новичков.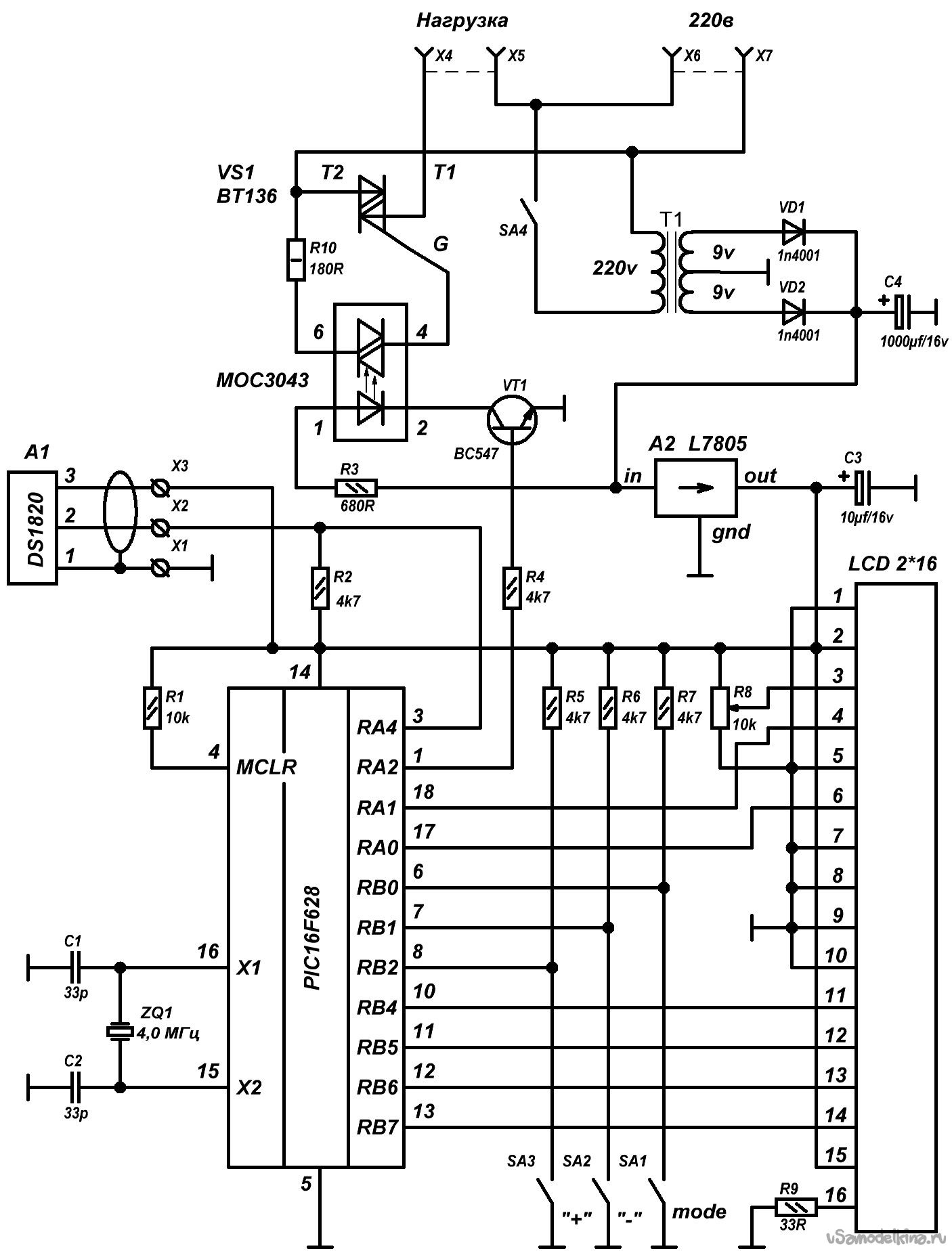
4. Прошивка с оптимизацией энергопотребления
Один из лучших способов уменьшить количество энергии, потребляемой микроконтроллером, — это написать эффективную и хорошо оптимизированную прошивку .Это напрямую влияет на объем работы, выполняемой ЦП за раз, и, в свою очередь, способствует увеличению мощности, потребляемой микроконтроллером. При написании микропрограммного обеспечения следует прилагать усилия, чтобы уменьшить размер кода и количество циклов, поскольку каждая выполняемая ненужная инструкция является тратой части энергии, хранящейся в батарее. Ниже приведены некоторые общие советы на основе C для разработки оптимизированной прошивки;
- По возможности используйте класс «Static Const», чтобы предотвратить копирование массивов, структур и т. Д. Во время выполнения.это потребляет энергию.
- Использовать указатели. Вероятно, они являются самой сложной частью языка C для понимания для начинающих, но они лучше всего подходят для эффективного доступа к структурам и объединениям.

- Избегайте Modulo!
- По возможности, локальные переменные важнее глобальных. Локальные переменные содержатся в ЦП, а глобальные переменные хранятся в ОЗУ, ЦП быстрее обращается к локальным переменным.
- Типы данных без знака — ваш лучший друг там, где это возможно.
- По возможности используйте «обратный отсчет» для петель.
- Вместо битовых полей для целых чисел без знака используйте битовые маски.
Подходы для уменьшения количества энергии, потребляемой микроконтроллером, не ограничиваются упомянутыми выше подходами на основе программного обеспечения, существуют подходы на основе аппаратного обеспечения , такие как метод управления напряжением ядра, но чтобы сохранить длину этого сообщения в разумных пределах, мы сохраним их на другой день.
Заключение
Реализация продукта с низким энергопотреблением начинается с выбора микроконтроллера, и это может сбивать с толку, когда вы пытаетесь просмотреть различные варианты, доступные на рынке. При сканировании таблица данных может хорошо работать для получения общей производительности микроконтроллеров, но для приложений с критическим энергопотреблением это может быть очень дорогостоящим подходом. Чтобы понять истинные характеристики мощности микроконтроллера, разработчики должны принять во внимание электрические характеристики и функции низкого энергопотребления, доступные микроконтроллеру . Разработчики должны заботиться не только о потреблении тока в каждом из режимов питания, рекламируемых в спецификации MCU, , они должны учитывать время пробуждения, источники пробуждения и периферийные устройства , которые доступны для использования в режимах низкого энергопотребления. .
При сканировании таблица данных может хорошо работать для получения общей производительности микроконтроллеров, но для приложений с критическим энергопотреблением это может быть очень дорогостоящим подходом. Чтобы понять истинные характеристики мощности микроконтроллера, разработчики должны принять во внимание электрические характеристики и функции низкого энергопотребления, доступные микроконтроллеру . Разработчики должны заботиться не только о потреблении тока в каждом из режимов питания, рекламируемых в спецификации MCU, , они должны учитывать время пробуждения, источники пробуждения и периферийные устройства , которые доступны для использования в режимах низкого энергопотребления. .
Важно проверить функции микроконтроллера, который вы планируете использовать, чтобы выяснить, какие варианты у вас есть для реализации с низким энергопотреблением. Микроконтроллеры были одним из самых больших бенефициаров технологического прогресса, и теперь существует несколько микроконтроллеров со сверхнизким энергопотреблением, которые гарантируют, что у вас есть ресурсы, которые помогут вам оставаться в рамках вашего бюджета на электроэнергию. Некоторые из них также предоставляют несколько программных инструментов для анализа мощности, которыми вы можете воспользоваться для эффективного проектирования.Личным фаворитом является линейка микроконтроллеров MSP430 от Texas Instrument.
Некоторые из них также предоставляют несколько программных инструментов для анализа мощности, которыми вы можете воспользоваться для эффективного проектирования.Личным фаворитом является линейка микроконтроллеров MSP430 от Texas Instrument.
Выбор между микроконтроллером и микропроцессором
Мозг встроенного устройства, который является процессором, является ключевым фактором, определяющим успех или неудачу устройства в выполнении задач, для которых оно предназначено. Блок обработки отвечает за каждый процесс, от ввода в систему до конечного вывода, поэтому выбор правильной платформы для мозга становится очень важным при проектировании устройства, поскольку все остальное будет зависеть от точности этого решения.
Микроконтроллер и микропроцессор
Компоненты обработки, используемые для встроенных устройств, можно разделить на две большие категории; Микроконтроллеры и микропроцессоры .
Микроконтроллеры — это небольшие вычислительные устройства на одной микросхеме, которые содержат одно или несколько процессорных ядер с устройствами памяти, встроенными вместе с программируемыми портами ввода-вывода специального и общего назначения (I / O). Они используются особенно в приложениях, где нужно выполнять только определенные повторяющиеся задачи.Мы уже обсуждали вопрос выбора подходящего микроконтроллера для ваших встраиваемых проектов.
Они используются особенно в приложениях, где нужно выполнять только определенные повторяющиеся задачи.Мы уже обсуждали вопрос выбора подходящего микроконтроллера для ваших встраиваемых проектов.
Микропроцессоры , с другой стороны, представляют собой вычислительные устройства общего назначения, которые включают в себя все функции центрального процессора на кристалле, но не включают в себя периферийные устройства, такие как память, а также входные и выходные контакты, такие как микроконтроллер.
Хотя производители сейчас меняют множество вещей, стирающих грань между микроконтроллерами и микропроцессорами, например использование памяти на микросхемах для микропроцессоров и возможность микроконтроллеров подключаться к внешней памяти, между этими компонентами и разработчиком все еще существуют ключевые различия. между ними нужно будет выбрать лучшее для конкретного проекта.
Узнайте больше о разнице между микроконтроллером и микропроцессором.
Факторы, которые следует учитывать при выборе MPU или MCU
Прежде чем принимать какое-либо решение о дальнейших действиях в отношении устройства обработки, которое будет использоваться для проектирования встраиваемого продукта, важно разработать спецификации проекта. Разработка проектных спецификаций дает возможность для предварительного проектирования устройства, который помогает детально определить проблему, которую необходимо решить, как ее решить, выделить компоненты, которые будут использоваться, и многое другое.Это помогает проектировщику принимать обоснованные общие решения по проекту и помогает определить, в каком направлении двигаться блоку обработки.
Некоторые из факторов проектной спецификации, которые необходимо учитывать перед выбором между микроконтроллером и микропроцессором, описаны ниже.
1. Вычислительная мощность
Вычислительная мощность — один из основных (если не главный) факторов, которые следует учитывать при выборе между микроконтроллером и микропроцессором. Это один из основных факторов, влияющих на микропроцессоры. Он измеряется в DMIPS (миллионы инструкций в секунду) и представляет собой количество инструкций, которые микроконтроллер или микропроцессор может обработать за секунду. По сути, это показатель того, насколько быстро устройство может выполнить назначенную ему задачу.
Это один из основных факторов, влияющих на микропроцессоры. Он измеряется в DMIPS (миллионы инструкций в секунду) и представляет собой количество инструкций, которые микроконтроллер или микропроцессор может обработать за секунду. По сути, это показатель того, насколько быстро устройство может выполнить назначенную ему задачу.
Хотя определение точной вычислительной мощности , необходимой для вашего проекта, может быть очень сложной задачей, можно сделать обоснованное предположение, изучив задачу (и), устройство создается для выполнения и какие вычислительные требования этих задач могут быть.Например, разработка устройства, которое требует использования полной операционной системы либо встроенного Linux, Windows CE или любой другой ОС, потребует вычислительной мощности до 500 DMIPS, что звучит как процессор? Да. Чтобы добавить к этому, для запуска операционной системы на устройстве потребуется блок управления памятью (MMU), который увеличит требуемую вычислительную мощность. Приложения устройств, которые включают в себя много арифметических операций, также требуют очень высоких значений DMIPS , и чем больше математических / числовых вычислений должно выполнять устройство, тем больше требования к конструкции склоняются в сторону использования микропроцессора из-за требуемой вычислительной мощности.
Приложения устройств, которые включают в себя много арифметических операций, также требуют очень высоких значений DMIPS , и чем больше математических / числовых вычислений должно выполнять устройство, тем больше требования к конструкции склоняются в сторону использования микропроцессора из-за требуемой вычислительной мощности.
Еще одно важное значение вычислительной мощности, которое влияет на выбор между микропроцессорами и микроконтроллерами, — это сложность или простота таких вещей, как Пользовательские интерфейсы . В наши дни желательно иметь красочные и интерактивные графические интерфейсы даже для самых простых приложений. Большинство библиотек, используемых для создания пользовательских интерфейсов, таких как QT, требуют вычислительной мощности до 80–100 DMIPS, и чем больше анимаций, изображений и другого мультимедийного содержимого будет отображаться, тем больше потребуется вычислительная мощность.Однако более простые пользовательские интерфейсы на экранах с низким разрешением требуют небольшой вычислительной мощности и могут питаться с помощью микроконтроллеров, так как в наши дни довольно много из них имеют встроенные интерфейсы для взаимодействия с различными дисплеями
Помимо некоторых основных функций, упомянутых выше, важно зарезервировать некоторую вычислительную мощность для связи и других периферийных устройств . Хотя большинство примеров, приведенных выше, как правило, поддерживают использование микропроцессоров, они, как правило, более дороги по сравнению с микроконтроллерами и будут излишними при использовании в определенных решениях, например, использование микропроцессора 500 DMIPS для автоматизации лампочки приведет к общей стоимости продукта выше, чем обычно, и может в конечном итоге привести к его провалу на рынке.
Хотя большинство примеров, приведенных выше, как правило, поддерживают использование микропроцессоров, они, как правило, более дороги по сравнению с микроконтроллерами и будут излишними при использовании в определенных решениях, например, использование микропроцессора 500 DMIPS для автоматизации лампочки приведет к общей стоимости продукта выше, чем обычно, и может в конечном итоге привести к его провалу на рынке.
2. Интерфейсы
Интерфейс, который будет использоваться для соединения различных элементов продукта. является одним из факторов, которые необходимо учитывать перед выбором между микроконтроллером и микропроцессором. Важно убедиться, что используемый блок обработки имеет интерфейсы, необходимые для других компонентов.
С точки зрения возможности подключения и связи, например, большинство микроконтроллеров и микропроцессоров обладают интерфейсами, необходимыми для подключения к устройствам связи, но когда высокоскоростные периферийные устройства связи, такие как сверхскоростной USB 3. 0, требуются несколько портов 10/100 Ethernet или порт Gigabit Ethernet, все склоняется в сторону микропроцессора, поскольку интерфейс, необходимый для их поддержки, обычно находится только на них, потому что они более способны обрабатывать большие объемы данные и скорость, с которой эти данные передаются.
0, требуются несколько портов 10/100 Ethernet или порт Gigabit Ethernet, все склоняется в сторону микропроцессора, поскольку интерфейс, необходимый для их поддержки, обычно находится только на них, потому что они более способны обрабатывать большие объемы данные и скорость, с которой эти данные передаются.
Влияние протоколов, используемых для этих интерфейсов, на объем памяти, необходимой для микропрограммного обеспечения, следует подтвердить, поскольку они имеют тенденцию увеличивать требования к памяти.Общее практическое правило состоит в том, что конструкция на основе микропроцессора должна применяться для приложений, которым требуется высокоскоростное соединение с большим объемом передаваемых данных , особенно когда система предполагает использование операционной системы.
3. Память
Эти два устройства обработки данных обрабатывают память и хранилище данных по-разному. Например, микроконтроллеры поставляются со встроенными фиксированными устройствами памяти, а микропроцессоры имеют интерфейсы, к которым можно подключать устройства памяти. Два основных следствия этого:
Два основных следствия этого:
Стоимость
Микроконтроллер становится более дешевым решением, поскольку не требует использования дополнительного запоминающего устройства, в то время как микропроцессор становится дорогостоящим решением, которое должно быть принято из-за этих дополнительных требований.
Ограниченная память
Фиксированная память микроконтроллера ограничивает объем данных, которые могут храниться в нем. Эта ситуация не применима к процессорам, поскольку они обычно подключаются к внешним устройствам памяти.Хорошим примером того, когда это ограничение может быть проблемой, является разработка прошивки для устройства. Добавление дополнительных килобайт к размеру кода может потребовать изменения используемого микроконтроллера, но если дизайн был основан на процессоре, нам нужно будет только изменить устройство памяти. Таким образом, микропроцессоры предлагают большую гибкость с памятью .
Есть несколько других факторов, основанных на памяти, которые необходимо учитывать, один из них — , время запуска (загрузки) .Микропроцессоры, например, хранят микропрограммное обеспечение во внешней памяти (обычно во внешней NAND или последовательной флэш-памяти), а при загрузке микропрограммное обеспечение загружается в DRAM процессора. Хотя это происходит за пару секунд, это может быть не идеально для некоторых приложений. С другой стороны, микроконтроллер занимает меньше времени .
По общим соображениям скорости, MCU обычно выигрывает из-за его способности обращаться к наиболее критичным по времени приложениям из-за используемого в них ядра процессора, того факта, что память встроена, а микропрограммное обеспечение, используемое с ними, всегда является либо RTOS или голый металл C.
4. Мощность
Последний момент, который следует рассмотреть, — это энергопотребление. В то время как микропроцессоры имеют режимы с низким энергопотреблением, этих режимов не так много, как в типичных микроконтроллерах, а с внешними компонентами, необходимыми для микропроцессорной конструкции, добиться режимов с низким энергопотреблением немного сложнее. Помимо режимов с низким энергопотреблением, фактическое количество энергии, потребляемой микропроцессором, намного ниже, чем потребляет микропроцессор, потому что чем больше возможности обработки, тем больше энергии требуется для поддержания работы процессора.
Таким образом, микроконтроллерынаходят применение, в котором требуется обработка сверхнизкой мощности. Устройства , такие как пульты дистанционного управления, бытовая электроника и несколько интеллектуальных устройств, в которых упор в дизайне сделан на длительный срок службы батарей. Они также используются там, где требуется строго детерминированное поведение.
С другой стороны, микропроцессорыидеально подходят для промышленных и бытовых приложений, которые требуют операционной системы , требуют больших вычислений и требуют высокоскоростного подключения или пользовательского интерфейса с большим количеством мультимедийной информации.
Заключение
Существует несколько других факторов, которые служат определяющими при выборе между этими двумя платформами, и все они относятся к производительности, возможностям и бюджету, но общий выбор становится проще, когда имеется надлежащая предварительная разработка системы и четко сформулированы требования. Микроконтроллеры в основном используются в решениях с очень ограниченным бюджетом спецификации и жесткими требованиями к питанию, тогда как микропроцессоры используются в приложениях с огромными требованиями к вычислениям и производительности.
Замените тепловой стабилизатор напряжения MGB
Слева вверху: биметаллический элемент, обернутый резистивной проволокой, устаревшего термического стабилизатора напряжения.
Справа внизу: твердотельный электронный регулятор напряжения, который можно использовать вместо него.
Установка твердотельного регулятора внутри корпуса Lucas
, как опубликовано в BritishV8 Magazine, Volume XVI, Issue 2, October 2008 текст: Curtis Jacobson
фото: Jim Miller
Примечания: в этой статье упоминается оборудование MGB, схемы и т. Д., а информация не могут быть переданы на другие ретроавтомобили.
Справочная информация
Используете ли вы оригинальные датчики уровня топлива и температуры охлаждающей жидкости на своем 1968 году? или позже МГБ? В отличие от современных датчиков вторичного рынка, эти два старомодных датчика тепловые («биметаллические») устройства. Их стрелка индикатора соединена с коротким балка, построенная из двух разнородных металлов. Луч обмотан проволокой сопротивления, который нагревается пропорционально количеству проходящего через него электрического тока.Положение стрелки манометра определяется изгибом балки из-за различного скорости теплового расширения двух металлов. Для правильной работы уровень топлива MG и Датчики температуры охлаждающей жидкости необходимо использовать с внешним стабилизатором напряжения. (Примечание: манометр MGB 1968-1972 годов также является тепловым прибором. Однако из-за уникальной природы датчика ему не требуется стабилизатор напряжения.)
На схематическом чертеже ниже «Схема стабилизатора напряжения серийного MGB» изображена как подключены датчики топлива и температуры.Таким образом, датчики разработаны для получения постоянного напряжения питания 10 Вольт, и это работа Voltage Стабилизатор, чтобы его обеспечить. Датчики уровня топлива и температуры охлаждающей жидкости на выходе соответствующих датчиков подключаются через свои крепления к шасси / земле. Датчики действуют как переменные резисторы; их сопротивление изменяется в зависимости от уровня топлива или температура охлаждающей жидкости соответственно.
Сам стабилизатор напряжения номинально рассчитан на 12 вольт. Однако мы знаем из ощутите, что «напряжение на входе» не такое стабильное и предсказуемое! Ряд факторов влияют на доступное напряжение питания, в том числе: состояние заряда аккумулятора, мощность генератора или генератора переменного тока в любой момент (что может по оборотам двигателя), а также от того, включены ли различные нагрузки в системе или нет.
Пожалуйста, поддержите компании-спонсоры, которые делают возможным создание BritishV8, в том числе:
Независимо от того, насколько стабильно или предсказуемо напряжение питания 12 В, напряжение Назначение стабилизатора — сгладить дела. В качестве обобщения можно сказать: «Если Стабилизатор напряжения обеспечивает более 10 вольт, оба датчика показывают высокое значение. Если он обеспечивает менее 10 Вольт, оба датчика показывают низкие значения «.
Однако это обобщение не совсем верно, потому что исходный MG Voltage Стабилизатор вообще не регулирует напряжение! Вместо этого он переключает питание «на» и «выключено» для достижения среднего напряжения (с течением времени) около 10 вольт.Если разобрать старомодный стабилизатор напряжения, вы обнаружите биметаллический элемент с намотанным на него проводом сопротивления (очень похоже на схему автоматического сброса прерыватель, и не совсем в отличие от самих датчиков.) Нагрев в проводе сопротивления заставляет биметаллический элемент изгибаться. Биметаллический элемент фактически прогибается и вперед довольно быстро, и, в свою очередь, он быстро открывает и закрывает набор контактов точки. Таким образом, он переключается между номинальным напряжением питания около 12 В и отключенное состояние (т.е.е. ноль вольт!) Это подходит старомодным, однокатушечным Датчики MGB довольно хороши, потому что в них встроено много механического демпфирования. в них. Если ваши манометры достаточно демпфированы, вы можете не увидеть, что их иглы постоянно шевелятся при включении и выключении стабилизатора напряжения; ты будешь воспринимайте только «средние» показания, которые они вам показывают.
По современным стандартам термостабилизаторы напряжения неточны и непостоянны. Их производительность сильно различается между летним и зимним временем, потому что их точность зависит от температуры окружающей среды.Нагрев под приборной панелью (например, когда лобовое стекло дефростеры включены) могут вызвать значительное смещение показаний датчиков. Вывод также может изменяться в течение срока службы стабилизатора напряжения как биметаллического элемента. усталости, поскольку внутренние контакты загрязняются и т. д. При обрыве провода сопротивления Стабилизатор напряжения просто пропускает электрический ток при постоянном и постоянном токе. нерегулируемое напряжение, поэтому старые термометры будут показывать высокие значения.
Если ваш стабилизатор напряжения старый или сломанный, или если вы просто хотите улучшить точность и постоянство ваших указателей уровня топлива и температуры охлаждающей жидкости, вы Возможно, вы захотите рассмотреть возможность перехода на современный твердотельный электронный регулятор напряжения.
ВАЖНОЕ ПРИМЕЧАНИЕ: если вы замените оригинальные датчики MGB на вторичные, вам, вероятно, следует удалить и НЕ заменять свой старомодный термостабилизатор напряжения. (Перемычка на соединениях стабилизатора напряжения.) Современные двухкатушечные манометры обеспечивают точная информация независимо от напряжения питания, но они могут быть неадекватно демпфированы, чтобы приспособиться к резким циклам включения / выключения теплового стабилизатора напряжения.
Пожалуйста, поддержите компании-спонсоры, которые делают возможным создание BritishV8, в том числе:
Список покупок
Твердотельные регуляторы напряжения недорогие, но их может быть сложно найти локально.Их проще всего купить в Интернете. «Google» номера деталей для выявления потенциальных поставщиков.
National Semiconductor «LM2940T-10.0» и NTE Electronics «NTE1953» являются твердотельные стабилизаторы напряжения с малым падением напряжения (LDO). Если вы поставите любой из них при постоянном напряжении от 10,5 В до 30 В они будут обеспечивать постоянный выход напряжение 10,0В. Подобно старомодному биметаллическому стабилизатору напряжения, они не может повысить напряжение: поэтому, если напряжение питания упадет ниже 10.5V, эти LDO будет «отключаться» и просто проходить через любое доступное напряжение питания.
Примечание: есть и другие альтернативные регуляторы напряжения, которые также можно использовать. Один например, номер детали Texas Instruments «UA7810CKCS» (он же «7810» или «LM7810») что, честно говоря, вы, вероятно, с большей вероятностью найдете в своей местной Radio Shack. В Основным преимуществом устройств National Semiconductor или NTE Electronics является их несколько более низкие характеристики отсева.
Также необходимо: всего несколько предметов, включая паяльник, припой, около шести дюймов изолированный провод, термоусадочная трубка (или, возможно, изолента) и т. д.
Дополнительные принадлежности: небольшая светодиодная лампа и резистор на 1000 Ом.
Выводы полупроводникового стабилизатора напряжения
слева направо: V IN , «GND», V OUT
Убедитесь, что твердотельный регулятор надежно заземлен на металлическую крышку.
Проезд
1. Отсоедините аккумулятор автомобиля и снимите оригинальный стабилизатор напряжения. из машины. (Примечание: стабилизатор напряжения установлен на стороне драйвера брандмауэр чуть выше рулевой колонки.)
2. Откройте регулятор напряжения, осторожно поддев язычки, которые зажимают металлическая крышка к пластиковому основанию.
3. Вырежьте и снимите старый биметаллический механизм регулятора, соблюдая осторожность. оставьте достаточно двух клемм, чтобы позже припаять к ним провода.
4. Подготовьте твердотельный регулятор напряжения, отрезав центр его три терминала. (Эта клемма номинально является заземлением, и будет избыточным с монтажным выступом в нашей установке.Они связаны внутренне …)
Нравится эта статья? Наш журнал финансируется благодаря щедрой поддержке таких читателей, как вы!
Чтобы внести свой вклад в наш операционный бюджет, нажмите здесь и следуйте инструкциям.
(Предлагаемый взнос составляет двадцать долларов в год. Не стесняйтесь давать больше!)
5. Используя короткий провод, установите перемычку между клеммами твердотельного регулятора напряжения. V IN (12 В) к клемме «B» на пластиковом основании.Тщательно припаяйте оба соединения.
6. Используя короткий провод, установите перемычку между полупроводниковым регулятором напряжения. V OUT (выход 10 В) к клемме «I» на пластиковом основании. Тщательно припаяйте оба соединения.
7. Светодиодный индикатор не является обязательным. Его цель — просто показать, что система запитана. и заземлен, и что регулятор напряжения работает. Светодиод подключается к одному конец регулятора напряжения 10V «OUT» терминала, а на другом конце он подключен на землю через резистор 1000 Ом.
8. Для правильной работы твердотельный регулятор должен быть электрически хорошо заземлен по отношению к остальной части автомобиля. Для этого сначала подключите его к металлической крышке регулятора напряжения с помощью крепежного винта и гайки. Заметка: сам регулятор напряжения в свою очередь должен быть заземлен на автомобиль путем его крепления. Если крепежные детали корродированы или загрязнены, их следует очистить на этом этапе.
Осторожно загните края металлической крышки обратно на пластиковую основу.
Дополнительный светодиодный индикатор просто указывает на то, что регулятор напряжения включен, заземлен и функционирует.
Выраженные мнения принадлежат авторам и предоставлены без каких-либо гарантий.
Применяете на свой страх и риск.
Фотографии Джима Миллера для британского журнала V8. Все права защищены.
Схематический чертеж «Цепи стабилизатора напряжения стандартного MGB» был получен из схемы Advance Auto-Wire,
и использовался здесь с разрешения.
— Руководство для новичков — Таймеры и счетчики
Микроконтроллер— Руководство для начинающих — Базовое и стандартное использование таймера и счетчика и часов микроконтроллера
Таймеры и счетчики настолько важны, что вы найдете множество примеров повсюду. эту серию руководств. Как следует из названия, таймеры могут показывать время и считать.Подсчет а время позволяет делать действительно крутые вещи, например регулировать яркость Светодиоды, управляющие углом сервопривода, принимают данные датчиков, которые передают в PWM (широтно-импульсная модуляция — подробнее об этом в другом руководстве), делая таймер (как на плите), или просто добавив переменную времени в микроконтроллер проект.
Но сначала важно знать, что внутри (или снаружи) микроконтроллеров AVR есть часы.Фактически, все микроконтроллеры имеют в себе часы (или используют тот, который находится вне микроконтроллера). Микроконтроллерам нужны часы, чтобы наши программы могли выполняться в ритме с часами. Это основная функция микроконтроллеров. Базовая инструкция обрабатывается, когда проходит тиканье часов. Так же, как эти программы, которые мы пишем, по мере прохождения часов, инструкции обрабатываются синхронно с тактами часов.
Функции таймера и счетчика в микроконтроллере просто отсчитывают синхронно с часами микроконтроллера.Однако счетчик может считать только до 256 (8-битный счетчик) или 65535 (16-битный счетчик). Это далеко от 1000000 тиков в секунду, которые обеспечивает стандартный микроконтроллер AVR. Микроконтроллер предоставляет очень полезную функцию, называемую предварительным масштабированием. Предварительное масштабирование — это просто способ счетчика пропустить определенное количество тактов микроконтроллера. Микроконтроллеры AVR позволяют выполнять предварительное масштабирование (пропуск) чисел: 8, 64, 256 и 1024. То есть, если в качестве предварительного делителя установлено 64, счетчик будет считать только каждый раз, когда часы отсчитывают 64 раза.Это означает, что за одну секунду (когда микроконтроллер тикает один миллион раз) счетчик будет считать только до 15625. вы могли видеть, что если счетчик досчитает до этого числа, вы сможете мигать светодиодом каждую секунду.
В основном таймеры имеют регистр для управления и регистр, в котором хранится счетчик. количество. Регистр управления содержит несколько переключателей для включения и выключения функций. И вы уже догадались… Одна из функций — выбрать предварительное масштабирование. Контроль Регистр называется TCCR0 или TCCR1 (Регистр управления таймером / счетчиком). TCCR0 — это 8-битный регистр управления и имеет только 8-битный регистр управления, поэтому есть только 8 переключателей для включения и выключения. TCCR1 — 16-битный, поэтому у него есть 16 переключателей для включения и выключен, но он находится в двух 8-битных регистрах с метками A и B (TCCR1A и TCCR1B). Переключатели следующие: FOC (принудительное сравнение выходных данных), WGM (генерация сигналов). Mode), COM (режим сравнения совпадения вывода) и CS (выбор часов).
Регистр, в котором хранится счетчик, называется регистром TCNT. И есть 8-битный версия (TCNT0) и 16-разрядная версия (TCNT1). Регистр TCNT1 фактически получает свое число из двух других 8-битных регистров, чтобы создать полное 16-битное число, но это все делается за кулисами (абстрактно), поэтому вам не нужно беспокоиться о том, как TCNT1 получил эту возможность иметь 16-битную версию, просто подумайте, это волшебство.
На видео были показаны две программы: одна показывает только мигание одного светодиода. примерно через 1 секунду, и другая программа, в которой один ряд из 7 светодиодов гоняется за каждую секунду, и еще один ряд из 7 светодиодов преследует каждый в 1 секунду. Последняя программа показан здесь, поскольку он имеет большинство функций, используемых с 16-битным таймером.
Не повторяя предыдущих постов, программа инициализирует порты для светодиодов и устанавливает таймер / счетчик №1 (16-битный таймер).Элемент управления TCCR1B Регистр используется для установки коэффициента предварительного масштабирования 64 с переключателями CS10 и CS11.
Поскольку мы хотим, чтобы один из 7 светодиодов следил за 1/7 секунды каждый, мы берем число 15,625 (1000000/64 — помните, что 1000000 — это тактовая частота микроконтроллера 1 МГц) и разделите его на 7, чтобы получить ~ 2,232,143. Вы говорите, но используете только 2232 в программе !! это потому, что TCNT1 принимает только целые числа (без десятичных знаков).В настоящее время вы говорите, отсчет времени будет отклоняться на величину десятичной дроби !! Верно, но Внутренние часы АРН в любом случае неточны на +/- 10%. Если используется внешний кристалл, вы можете использовать идеальное число, которое представляет соответствующий счетчик.
Вы заметите, что TCNT1 также сбрасывается на ноль вручную. Это необходимо в противном случае TCNT1 будет продолжать отсчет после установленного условия 2232.Есть и другие функции управления, которые имеют автоматическое обнуление этого числа, но мы доберемся до это в другом руководстве. Остальные части программы используют то, что мы узнали i предыдущие руководства (включение и выключение светодиодов и массивов).
#includeint main (пусто)
{ DDRB = 0b01111111;
PORTB = 0b00000000;
DDRD = 0b01111111;
PORTD = 0b00000000;
TCCR1B | = 1
int LEDNumber [2];
а (1)
{ если (TCNT1> 2232)
{ TCNT1 = 0;
PORTB = 1
LEDNumber [0] ++;
если (LEDNumber [0]> 6)
{
LEDNumber [0] = 0;
PORTD = 1 << LEDNumber [1];
LEDNumber [1] ++;
если (LEDNumber [1]> 6)
LEDNumber [1] = 0;
} } } }Thermal Smart Control 101: как решить проблемы с качеством печати
войти в систему- Логин
- Зарегистрировано
- 中文 — 简
- Английский
-
Решения
- Производство
- Склад и логистика
- Розничная торговля
- Здравоохранение
- Развлечения и гостиничный бизнес
- Вывески на заказ
-
Продукты
Промышленные принтеры штрих-кодов
Настольные принтеры штрих-кода
Мобильные принтеры штрих-кодов
Механизмы и модули печати
Принтеры цветных этикеток
Принадлежности
Аксессуары
- шириной 4 дюйма
- MX240P серии
- Mh340 серии
- TTP-2410MT Серия
- TTP-2410MU Серия
- MB240 серии
- TTP-246M Серия Pro
- ML240 серии
- ME240 серии
- TTP-244M Серия Pro
- шириной 6 дюймов
- TTP-2610MT Серия
- шириной 8 дюймов
- TTP-286MT серии
- шириной 2 дюйма
- Серия ТТП-225
- Серия TDP-225
- TDP-324W Серия
- шириной 4 дюйма
- TX200 серии
- ТТП-247 Серия
- TC серии
- TE200 серии
- ТТП-244 Pro
- ТТП-244CE
- Серия TTP-243 Pro
- TDP-247 Серия
- DA210-DA220 серии
- TDP-244
- шириной 2 дюйма
- Альфа-2Р
- ТДМ-20
- шириной 3 дюйма
- Альфа-3Р
- ТДМ-30
- шириной 4 дюйма
- Альфа-4Л
- шириной 4 дюйма
- Серия PEX-1000
- MH серии
- MB серии
- TE серии
- шириной 4 дюйма
- Серия CPX4
- Этикетки для термотрансферной и прямой термопечати
- Ленты для термотрансферной печати
- Этикетки для струйных принтеров
- Струйные баки
- Браслеты
- Расходные материалы для мобильной печати
- Чистящие средства
- КП-200 плюс
- Резак для этикеток
-
Поддержка и загрузки
- Поддержка продукта и загрузки
- Техническая поддержка
- Гарантия и услуги
- Снятый с производства продукт
- Учебный центр
-
Партнеры
- Стать нашим партнером
- Партнерский портал
- Партнеры по программным решениям
- Блог
-
Связаться с нами
- Онлайн-запрос
-
О TSC
- Профиль компании
- Гарантия качества
- Окружающая среда
- Взаимодействие с заинтересованными сторонами
- Новости / События / Информационный бюллетень
- Конфиденциальность
