Какие существуют основные виды электродвигателей. Как классифицируются двигатели постоянного и переменного тока. Какие параметры важны при выборе электродвигателя. Каковы особенности синхронных и асинхронных двигателей.
Классификация электродвигателей по роду тока
Электродвигатели можно разделить на две большие категории в зависимости от используемого рода тока:
- Двигатели постоянного тока
- Двигатели переменного тока
Рассмотрим особенности каждого типа подробнее.
Двигатели постоянного тока
Электродвигатели постоянного тока обладают высоким КПД при преобразовании электрической энергии в механическую. Их главные особенности:
- Наличие щеточно-коллекторного узла для соединения подвижной и неподвижной частей
- Возможность плавного регулирования скорости вращения
- Высокий пусковой момент
По конструкции щеточно-коллекторного узла различают:
- Коллекторные двигатели
- Бесколлекторные двигатели
- Самовозбуждающиеся (с параллельным, последовательным или смешанным возбуждением)
- С возбуждением от постоянных магнитов
Двигатели переменного тока
Двигатели переменного тока представлены широким ассортиментом устройств. Их основная классификация:
- Синхронные двигатели
- Асинхронные двигатели
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Их применяют для создания мощных электроприводов.
Асинхронные двигатели имеют частоту вращения ротора, отличную от частоты вращения магнитного поля. Это наиболее распространенный тип электродвигателей в промышленности и быту.
Типы электродвигателей по числу фаз
По количеству фаз питающего напряжения различают следующие типы электродвигателей:
- Однофазные
- Двухфазные
- Трехфазные
- Многофазные
Наиболее распространены трехфазные асинхронные двигатели. Они обеспечивают высокую мощность и эффективность при относительно низкой стоимости.
Классификация по способу защиты
Важным параметром при выборе электродвигателя является степень защиты его корпуса от внешних воздействий. Различают следующие основные типы защиты:

- IP21, IP22 — защищенные
- IP23, IP24 — с защитой от брызг и капель
- IP44 — IP54 — закрытое исполнение
- IP55, IP56 — с защитой от влаги
- IP65, IP66 — с высоким уровнем защиты от пыли
- IP67, IP68 — герметичные
Чем выше степень защиты, тем в более жестких условиях может эксплуатироваться электродвигатель.
Категории размещения электродвигателей
В зависимости от условий эксплуатации электродвигатели подразделяют на следующие категории размещения:
- Для помещений с высокой влажностью
- Для закрытых помещений с естественной вентиляцией
- Для эксплуатации на открытом воздухе
- Для помещений с искусственно регулируемыми климатическими параметрами
- Для помещений с изменяющимися влажностью и температурой
Правильный выбор категории размещения обеспечивает надежную работу электродвигателя в заданных условиях.
Климатическое исполнение электродвигателей
Согласно ГОСТ 15150-69, электродвигатели классифицируют по климатическому исполнению:
- В — для всех макроклиматических районов
- ХЛ — для холодного климата
- УХЛ — для умеренного и холодного климата
- У — для умеренного климата
- ТВ — для влажного тропического климата
- ТС — для сухого тропического климата
- О — для общеклиматического применения
- М — для умеренно-холодного морского климата
- ТМ — для тропического морского климата
- ОМ — для всех районов на суше и на море
Климатическое исполнение указывается в маркировке двигателя и определяет возможность его применения в конкретных климатических условиях.

Особенности синхронных электродвигателей
Синхронные электродвигатели имеют ряд отличительных характеристик:
- Частота вращения ротора равна частоте вращения магнитного поля статора
- Высокий КПД, особенно при больших мощностях
- Возможность работы с высоким коэффициентом мощности
- Более сложная конструкция по сравнению с асинхронными двигателями
- Необходимость в специальных устройствах пуска и синхронизации
Синхронные двигатели широко применяются в мощных промышленных установках, где требуется постоянная скорость вращения независимо от нагрузки.
Характеристики асинхронных электродвигателей
Асинхронные электродвигатели являются наиболее распространенным типом электрических машин. Их основные особенности:
- Простота конструкции и высокая надежность
- Возможность прямого пуска от сети
- Частота вращения ротора отличается от частоты вращения магнитного поля статора
- КПД несколько ниже, чем у синхронных двигателей, особенно при малых мощностях
Асинхронные двигатели широко используются в промышленности, сельском хозяйстве, бытовой технике и других областях.

Выбор электродвигателя: ключевые параметры
При выборе электродвигателя необходимо учитывать следующие основные параметры:
- Мощность
- Частота вращения
- Напряжение питания
- Режим работы (кратковременный, повторно-кратковременный, продолжительный)
- Условия эксплуатации (температура, влажность, запыленность)
- Способ монтажа
- Степень защиты
Правильный выбор этих параметров обеспечивает эффективную и надежную работу электродвигателя в конкретных условиях применения.
Техника безопасности при работе с электродвигателями
При монтаже и эксплуатации электродвигателей необходимо соблюдать следующие правила безопасности:
- Перед подключением проверять соответствие параметров питающей сети характеристикам двигателя
- Измерять сопротивление изоляции обмоток перед установкой
- Обеспечивать правильное заземление корпуса двигателя
- Не производить монтаж под напряжением
- Регулярно проводить осмотр и техническое обслуживание
- Соблюдать требования к охлаждению двигателя
- Не допускать перегрузок и перегрева двигателя
Соблюдение этих правил обеспечивает безопасную работу электродвигателя и продлевает срок его службы.
Типы и виды электродвигателей — переменного и постоянного тока, коллекторные, асинхронные, прямого привода
электрика, сигнализация, видеонаблюдение, контроль доступа (СКУД), инженерно технические системы (ИТС)
Одним из основных стимулов к широкой электрификации, начавшейся в XX веке, стала возможность легкого преобразования энергии электрического тока в механическую — к тому времени уже был известен коллекторный электродвигатель, изобретенный Якоби еще в первой половине XIX века.
Изобретение асинхронного двигателя переменного тока стало еще большим шагом вперед.
Электромотор лишился механически трущихся и искрящих узлов (щеток и коллектора), превзойдя по бесшумности и ресурсу любой другой существовавший в то время тип привода.
Независимо от конструкции, любой электродвигатель устроен одинаково: внутри цилиндрической проточки в неподвижной обмотке (статоре) вращается ротор, в котором возбуждается магнитное поле, приводящее к отталкиванию его полюсов от статора.
Поддержание постоянного отталкивания требует:
- перекоммутации обмоток ротора, как это делается на коллекторных электродвигателях;
- создания вращающегося магнитного поля в самом статоре (классический пример – асинхронный трехфазный двигатель).
Достоинства электродвигателей переоценить трудно. Это:
- Крайняя простота.
- Электродвигатель состоит из минимального количества узлов, поэтому ломаться в нем практически нечему.
- Самостоятельный запуск.
- Электродвигателю не нужен пусковой импульс, он начинает вращаться сам при включении питания (исключение – однофазные электродвигатели с пусковой обмоткой, но они практически вышли из употребления). Это позволяет отказаться от холостого хода, включая электромотор только при необходимости.
- Отсутствие вибраций.
-
Так как в электродвигателях энергия магнитного поля непосредственно преобразуется во вращение, при должной балансировке ротора они полностью бесшумны и не создают вибрации.
- Легкость управления оборотами и крутящим моментом.
- Несмотря на то, что на разных типах электродвигателей это достигается разными способами, управление ими в любом случае достаточно просто и надежно.
- Возможность реверса.
- На коллекторном двигателе достаточно поменять местами полюса якоря, на трехфазном электромоторе – изменить порядок включения фаз.
- Обратимость.
- Коллекторные электродвигатели при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
Благодаря удобству передачи на большие расстояния и легкости преобразования переменный ток успешно стал стандартом электроснабжения.
В сфере же производства электродвигателей его способность возбуждать переменное магнитное поле в статоре и соответственно индуцировать ток в короткозамкнутой обмотке ротора позволила создать асинхронные электродвигатели.
Ротор такого электродвигателя – это металлический цилиндр, в пазы которого под углом к оси вращения запрессованы или залиты токопроводящие жилы, на торцах ротора объединенные кольцами в одно целое. Переменное магнитное поле статора возбуждает в роторе, напоминающем беличье колесо, противоток и, соответственно, отталкивающее его от статора магнитное поле.
В зависимости от числа обмоток статора асинхронный двигатель может быть:
Однофазным – в этом случае главным недостатком двигателя становится невозможность самостоятельного запуска, так как вектор силы отталкивания проходит строго через ось вращения.
Для начала работы двигателю необходим или стартовый толчок, или включение отдельной пусковой обмотки, создающей дополнительный момент силы, смещающий их суммарный вектор относительно оси якоря.
Двухфазный электродвигатель имеет две обмотки, в которых фазы смещены на угол, соответствующий геометрическому углу между обмотками. В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
В этом случае в электродвигателе создается так называемое вращающееся магнитное поле (спад напряженности поля в полюсах одной обмотки происходит синхронно с нарастанием его в другой).
Такой двигатель становится способным к самостоятельному запуску, однако имеет трудности с реверсом. Поскольку в современном электроснабжении не используются двухфазные сети, фактически электродвигатели этого рода применяются в однофазных сетях с включением второй фазы через фазовращающий элемент (обычно – конденсатор).
Трехфазный асинхронный электродвигатель – наиболее совершенный тип асинхронного мотора, так как в нем появляется возможность легкого реверса – изменение порядка включения фазных обмоток изменяет направление вращения магнитного поля, а соответственно и ротора.
Коллекторные двигатели переменного тока используются в тех случаях, когда требуется получение высоких частот вращения (асинхронные электродвигатели не могут превышать скорость вращения магнитного потока в статоре – для промышленной сети 50 Гц это 3000 об/мин).
Кроме того, они выигрывают в пусковом крутящем моменте (здесь он пропорционален току, а не оборотам) и имеют меньший пусковой ток, меньше перегружая электросеть при запуске. Также они позволяют легко управлять своими оборотами.
Обратной стороной этих достоинств становится дороговизна (требуется изготовление ротора с наборным сердечником, несколькими обмотками и коллектором, который к тому же сложнее балансировать) и меньший ресурс. Помимо необходимости в регулярной замене стирающихся щеток, со временем изнашивается и сам коллектор.
Синхронный электродвигатель имеет ту особенность, что магнитное поле ротора индуцируется не магнитным полем статора, а собственной намоткой, подключенной к отдельному источнику постоянного тока.
Благодаря этому частота его вращения равна частоте вращения магнитного поля статора, откуда и происходит сам термин «синхронный».
Как и двигатель постоянного тока, синхронный двигатель переменного тока является обратимым:
- при подаче напряжения на статор он работает как электродвигатель;
- при вращении от внешнего источника он сам начинает возбуждать в фазных обмотках переменный ток.

Основная область использования синхронных электродвигателей – высокомощные приводы. Здесь увеличение КПД относительно асинхронных электромоторов означает значительное снижение потерь электроэнергии.
Также синхронные двигатели используются в электротранспорте. Однако, для управления скоростью в этом случае требуются мощные частотные преобразователи, зато при торможении возможен возврат энергии в сеть.
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Так как постоянный ток не способен создать изменяющееся магнитное поле, обеспечение непрерывного вращения ротора требует принудительной перекоммутации обмоток, или дискретного изменения направления магнитного поля.
Старейший из известных способов – это использование электромеханического коллектора. В этом случае якорь электродвигателя имеет несколько разнонаправленных обмоток, соединенных с находящимися в соответствующем положении относительно щеток ламелями коллектора.
В момент включения питания возникает импульс в обмотке, соединенной со щетками, после чего ротор проворачивается, и в том же месте относительно полюсов статора включается новая обмотка.
Так как намагниченность статора во время работы коллекторного электродвигателя постоянного тока не изменяется, вместо сердечника с обмотками могут использоваться мощные постоянные магниты, что сделает мотор компактнее и легче.
Коллекторный двигатель не лишен ряда недостатков. Это:
- высокий уровень помех, как передаваемых в питающую сеть при переключении обмоток якоря, так и возбуждаемых искрением щеток;
- неизбежный износ коллектора и щеток;
- повышенная шумность при работе.
Современная силовая электроника позволила избавиться от этих недостатков, применяя так называемый шаговый двигатель – в нем ротор имеет постоянную намагниченность, а внешнее устройство последовательно меняет направление тока в нескольких обмотках статора.
Фактически за единичный импульс тока ротор проворачивается на фиксированный угол (шаг), откуда и пошло название электромоторов такого типа.
Шаговые электродвигатели бесшумны, а также позволяют в широчайших пределах регулировать как крутящий момент (амплитудой импульсов), так и обороты (частотой), а также легко реверсируются изменением порядка следования сигналов.
По этой причине они широко используются в сервоприводах и автоматике, однако их максимальная мощность определяется возможностями силовой управляющей схемы, без которой шаговые двигатели неработоспособны.
© 2012-2022 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
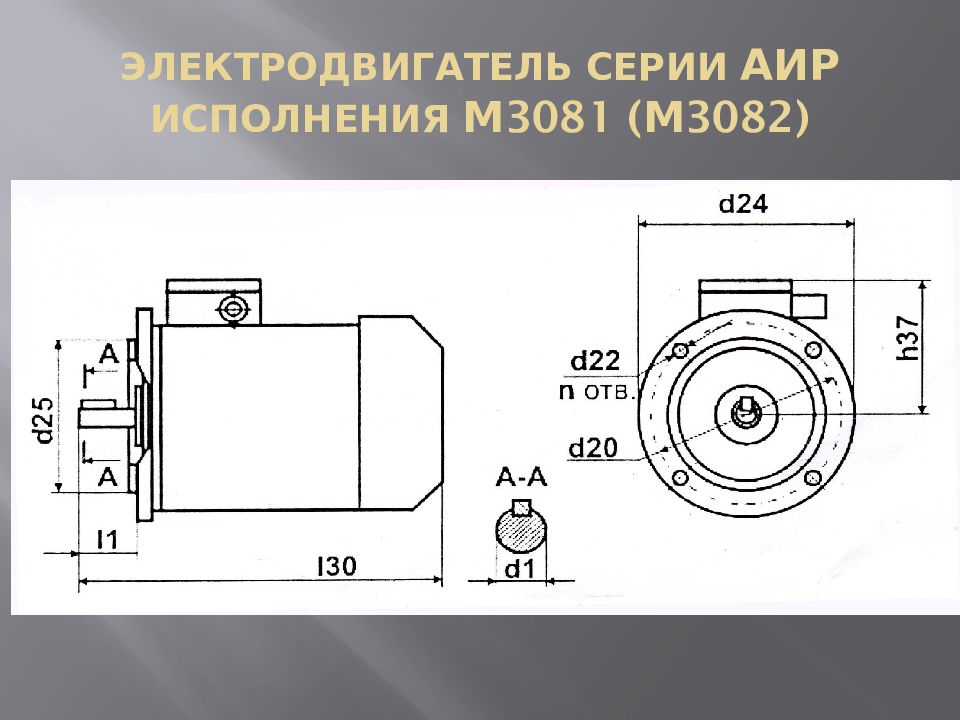
Виды электродвигателей и их модификации
Модификации электродвигателей
Асинхронные электродвигатели АИР благодаря несложной конструкции, неимения нестационарных контактов и невысокой цене, при высокой ремонтопригодности, востребованы во всех без исключения отраслях промышленности. Поскольку данный тип моторов очень распространен, он имеет достаточно широкий ряд модификаций. Из-за этого часто встает вопрос, какие электродвигатели выбрать под те или иные задачи. Давайте разберемся, какие бывают электродвигатели и какую маркировку они имеют.
Какие бывают электродвигатели
Электродвигатель с повышенным скольжением (С).
Моторы с повышенным скольжением (АИРС) устанавливают на механизмы, которые работают с большими нагрузками, нежели могут выдержать обычные асинхронные эл двигатели. Также их ставят на агрегаты, которые работают в повторно-кратковременном режиме. Для того чтобы обеспечить данные режимы работы в обмотке ротора используют катанку из стали с более высокой сопротивляемостью к деформациям. По сути, они отличаются от стандартных моторов только лишь внутренним строением. Такие двигатели часто применяют на судовом оборудовании.
Двигатель с самовентиляцией и защищенного исполнения (Н).
Это машины, у которых вентилятор закреплен на собственном валу и при вращении он создает аэродинамическое давление. В данном случае мотор имеет закрытое исполнение с рубчатой поверхностью. Служит это для повышения плоскости охлаждения. Применяются, например, в силовых насосах, используемых при добыче нефти или газа.
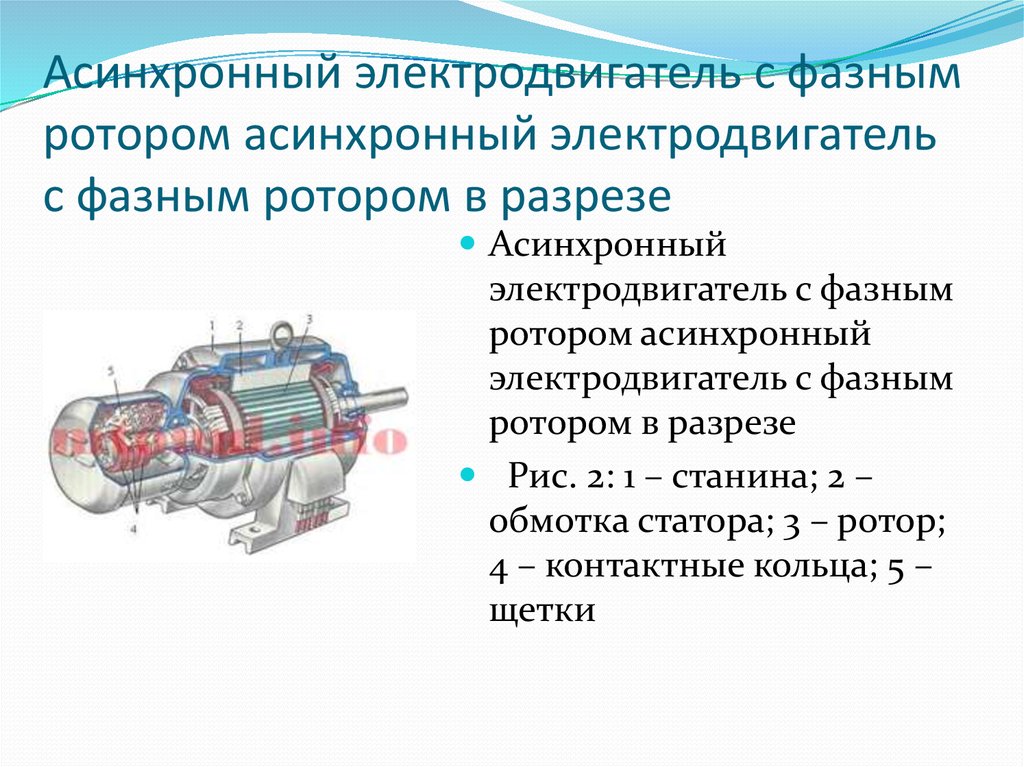
Эл двигатель с фазным ротором (К).
Данный мотор можно регулировать с помощью добавления в цепь ротора дополнительных резисторов. Данное исполнение позволяет повысить пусковой момент и пусковые токи. Сопротивление, в большинстве случаев, дополняется с помощью реостатов.
Встраиваемый электродвигатель (В).
Как ясно из названия, они предназначены для встраивания в какой-либо механизм. По своим характеристикам не отличаются от двигателей основного исполнения. Применяются в токарных станках, например.
С электромагнитным тормозом (Е).
Как правило, такие двигатели устанавливаются на оборудование, в котором необходима возможность практически мгновенной остановки (станочно-конвейерное оборудование). На самом деле это обычный асинхронный двигатель, в котором предусмотрен электронный тормоз. Возможно исполнение с ручкой растормаживания (модификация Е2).
Двигатели для привода центробежных моноблочных насосов (Ж).
Отличаются от обычных электродвигателей наличием продленного вала. Делается это для постановки рабочих колес насосов.
Для мотор-редукторов (РЗ).
Конструктивно ничем не отличаются от остальных электродвигателей АИР, за исключением особой формы фланцевого подшипникового щита, которая обеспечивает установку усиленного подшипника и специального рабочего конца вала.
Эл двигатели АИР для станков-качалок (С).
Находят применение на нефтепромысле. Идентичны моторам, на базе которых созданы. Подразумевается их размещение на открытом воздухе.
Для приводов лифтов (Л).
Предназначены для привода лебедок лифтов. Данная модификация двигателей позволяет получить плавность хода всего механизма за счет постоянного момента на валу ротора.
Со встроенными датчиками (Б).
Как ясно из названия – установленные различные датчики для защиты электродвигателя. Например, температурный датчик: при нагреве двигателя устройства защиты воздействуют на цепь контактора или пускателя и отключают машину.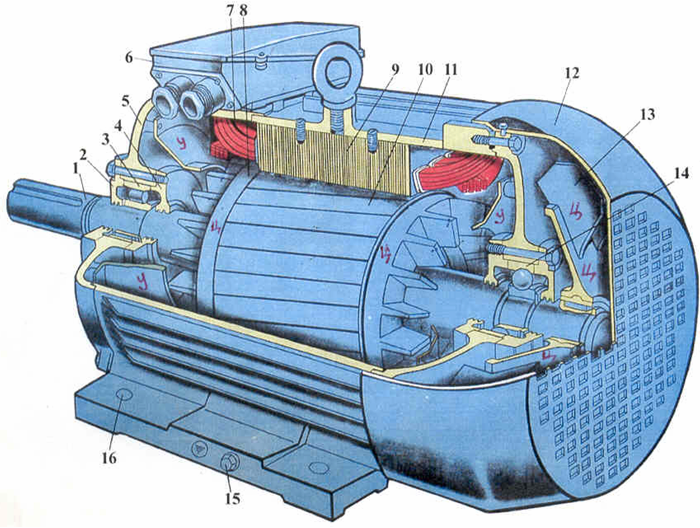 Используются на атомных станциях или других предприятиях, где чрезвычайно важна безаварийность.
Используются на атомных станциях или других предприятиях, где чрезвычайно важна безаварийность.
Двигатели с повышенной точностью по установочным размерам (П).
Имеют повышенную точность таких параметров как биение рабочего конца вала и так далее. Уменьшен сохранившийся дисбаланс роторов двигателей.
Специалисты компании УЭСК помогут сделать правильный выбор
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| АИР56В2 | 0,25 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 |
| АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 2,2 | 0,91 | 4,7 |
| АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,2 | 2,3 | 1,77 | 8,7 |
| АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| АИР71В4 | 0,75 | 1390 | 73,0 | 0,76 | 6,0 | 2,3 | 2,3 | 2,05 | 10 |
| АИР71А6 | 0,37 | 880 | 62,0 | 0,70 | 4,7 | 1,9 | 2,0 | 1,3 | 8,4 |
| АИР71В6 | 0,55 | 880 | 65,0 | 0,72 | 4,7 | 1,9 | 2,1 | 1,8 | 10 |
| АИР71А8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР71В8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР80А2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80А2ЖУ2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80В2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80В2ЖУ2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80А4 | 1,1 | 1390 | 76,2 | 0,77 | 6,0 | 2,3 | 2,3 | 2,85 | 14 |
| АИР80В4 | 1,5 | 1400 | 78,5 | 0,78 | 6,0 | 2,3 | 2,3 | 3,72 | 16 |
| АИР80А6 | 0,75 | 905 | 69,0 | 0,72 | 5,3 | 2,0 | 2,1 | 2,3 | 14 |
| АИР80В6 | 1,1 | 905 | 72,0 | 0,73 | 5,5 | 2,0 | 2,1 | 3,2 | 16 |
| АИР80А8 | 0,37 | 675 | 62,0 | 0,61 | 4,0 | 1,8 | 1,9 | 1,49 | 15 |
| АИР80В8 | 0,55 | 680 | 63,0 | 0,61 | 4,0 | 1,8 | 2,0 | 2,17 | 18 |
| АИР90L2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L2ЖУ2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L4 | 2,2 | 1410 | 80,0 | 0,81 | 7,0 | 2,3 | 2,3 | 5,1 | 17 |
| АИР90L6 | 1,5 | 920 | 76,0 | 0,75 | 5,5 | 2,0 | 2,1 | 4,0 | 18 |
| АИР90LA8 | 0,75 | 680 | 70,0 | 0,67 | 4,0 | 1,8 | 2,0 | 2,43 | 23 |
| АИР90LB8 | 1,1 | 680 | 72,0 | 0,69 | 5,0 | 1,8 | 2,0 | 3,36 | 28 |
| АИР100S2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100S2ЖУ2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100L2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100L2ЖУ2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100S4 | 3,0 | 1410 | 82,6 | 0,82 | 7,0 | 2,3 | 2,3 | 6,8 | 21 |
| АИР100L4 | 4,0 | 1435 | 84,2 | 0,82 | 7,0 | 2,3 | 2,3 | 8,8 | 37 |
| АИР100L6 | 2,2 | 935 | 79,0 | 0,76 | 6,5 | 2,0 | 2,1 | 5,6 | 33,5 |
| АИР100L8 | 1,5 | 690 | 74,0 | 0,70 | 5,0 | 1,8 | 2,0 | 4,4 | 33,5 |
| АИР112M2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М2ЖУ2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М4 | 5,5 | 1440 | 85,7 | 0,83 | 7,0 | 2,3 | 2,3 | 11,7 | 45 |
| АИР112MA6 | 3,0 | 960 | 81,0 | 0,73 | 6,5 | 2,1 | 2,1 | 7,4 | 41 |
| АИР112MB6 | 4,0 | 860 | 82,0 | 0,76 | 6,5 | 2,1 | 2,1 | 9,75 | 50 |
| АИР112MA8 | 2,2 | 710 | 79,0 | 0,71 | 6,0 | 1,8 | 2,0 | 6,0 | 46 |
| АИР112MB8 | 3,0 | 710 | 80,0 | 0,73 | 6,0 | 1,8 | 2,0 | 7,8 | 53 |
| АИР132M2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132М2ЖУ2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132S4 | 7,5 | 1460 | 87,0 | 0,84 | 7,0 | 2,3 | 2,3 | 15,6 | 52 |
| АИР132M4 | 11 | 1450 | 88,4 | 0,84 | 7,0 | 2,2 | 2,3 | 22,5 | 60 |
| АИР132S6 | 5,5 | 960 | 84,0 | 0,77 | 6,5 | 2,1 | 2,1 | 12,9 | 56 |
| АИР132M6 | 7,5 | 970 | 86,0 | 0,77 | 6,5 | 2,0 | 2,1 | 17,2 | 61 |
| АИР132S8 | 4,0 | 720 | 81,0 | 0,73 | 6,0 | 1,9 | 2,0 | 10,3 | 70 |
| АИР132M8 | 5,5 | 720 | 83,0 | 0,74 | 6,0 | 1,9 | 2,0 | 13,6 | 86 |
| АИР160S2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160S2ЖУ2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160M2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160М2ЖУ2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160S4 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160S4ЖУ2 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160M4 | 18,5 | 1470 | 90,0 | 0,86 | 7,5 | 2,2 | 2,3 | 36,3 | 142 |
| АИР160S6 | 11 | 970 | 87,5 | 0,78 | 6,5 | 2,0 | 2,1 | 24,5 | 125 |
| АИР160M6 | 15 | 970 | 89,0 | 0,81 | 7,0 | 2,0 | 2,1 | 31,6 | 155 |
| АИР160S8 | 7,5 | 720 | 85,5 | 0,75 | 6,0 | 1,9 | 2,0 | 17,8 | 125 |
| АИР160M8 | 11 | 730 | 87,5 | 0,75 | 6,5 | 2,0 | 2,0 | 25,5 | 150 |
| АИР180S2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180S2ЖУ2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180M2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180М2ЖУ2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180S4 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180S4ЖУ2 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180M4 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180М4ЖУ2 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180M6 | 18,5 | 980 | 90,0 | 0,81 | 7,0 | 2,1 | 2,1 | 38,6 | 160 |
| АИР180M8 | 15 | 730 | 88,0 | 0,76 | 6,6 | 2,0 | 2,0 | 34,1 | 172 |
| АИР200M2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200М2ЖУ2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200L2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200L2ЖУ2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200M4 | 37 | 1475 | 92,0 | 0,87 | 7,2 | 2,2 | 2,3 | 70,2 | 230 |
| АИР200L4 | 45 | 1475 | 92,5 | 0,87 | 7,2 | 2,2 | 2,3 | 84,9 | 260 |
| АИР200M6 | 22 | 980 | 90,0 | 0,83 | 7,0 | 2,0 | 2,1 | 44,7 | 195 |
| АИР200L6 | 30 | 980 | 91,5 | 0,84 | 7,0 | 2,0 | 2,1 | 59,3 | 225 |
| АИР200M8 | 18,5 | 730 | 90,0 | 0,76 | 6,6 | 1,9 | 2,0 | 41,1 | 210 |
| АИР200L8 | 22 | 730 | 90,5 | 0,78 | 6,6 | 1,9 | 2,0 | 48,9 | 225 |
| АИР225M2 | 55 | 2970 | 93,0 | 0,90 | 7,5 | 2,0 | 2,3 | 100 | 320 |
| АИР225M4 | 55 | 1480 | 93,0 | 0,87 | 7,2 | 2,2 | 2,3 | 103 | 325 |
| АИР225M6 | 37 | 980 | 92,0 | 0,86 | 7,0 | 2,1 | 2,1 | 71,0 | 360 |
| АИР225M8 | 30 | 735 | 91,0 | 0,79 | 6,5 | 1,9 | 2,0 | 63 | 360 |
| АИР250S2 | 75 | 2975 | 93,6 | 0,90 | 7,0 | 2,0 | 2,3 | 135 | 450 |
| АИР250M2 | 90 | 2975 | 93,9 | 0,91 | 7,1 | 2,0 | 2,3 | 160 | 530 |
| АИР250S4 | 75 | 1480 | 93,6 | 0,88 | 6,8 | 2,2 | 2,3 | 138,3 | 450 |
| АИР250M4 | 90 | 1480 | 93,9 | 0,88 | 6,8 | 2,2 | 2,3 | 165,5 | 495 |
| АИР250S6 | 45 | 980 | 92,5 | 0,86 | 7,0 | 2,1 | 2,0 | 86,0 | 465 |
| АИР250M6 | 55 | 980 | 92,8 | 0,86 | 7,0 | 2,1 | 2,0 | 104 | 520 |
| АИР250S8 | 37 | 740 | 91,5 | 0,79 | 6,6 | 1,9 | 2,0 | 78 | 465 |
| АИР250M8 | 45 | 740 | 92,0 | 0,79 | 6,6 | 1,9 | 2,0 | 94 | 520 |
| АИР280S2 | 110 | 2975 | 94,0 | 0,91 | 7,1 | 1,8 | 2,2 | 195 | 650 |
| АИР280M2 | 132 | 2975 | 94,5 | 0,91 | 7,1 | 1,8 | 2,2 | 233 | 700 |
| АИР280S4 | 110 | 1480 | 94,5 | 0,88 | 6,9 | 2,1 | 2,2 | 201 | 650 |
| АИР280M4 | 132 | 1480 | 94,8 | 0,88 | 6,9 | 2,1 | 2,2 | 240 | 700 |
| АИР280S6 | 75 | 985 | 93,5 | 0,86 | 6,7 | 2,0 | 2,0 | 142 | 690 |
| АИР280M6 | 90 | 985 | 93,8 | 0,86 | 6,7 | 2,0 | 2,0 | 169 | 800 |
| АИР280S8 | 55 | 740 | 92,8 | 0,81 | 6,6 | 1,8 | 2,0 | 111 | 690 |
| АИР280M8 | 75 | 740 | 93,5 | 0,81 | 6,2 | 1,8 | 2,0 | 150 | 800 |
| АИР315S2 | 160 | 2975 | 94,6 | 0,92 | 7,1 | 1,8 | 2,2 | 279 | 1170 |
| АИР315M2 | 200 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315МВ2 | 250 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315S4 | 160 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 288 | 1000 |
| АИР315M4 | 200 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 360 | 1200 |
| АИР315S6 | 110 | 985 | 94,0 | 0,86 | 6,7 | 2,0 | 2,0 | 207 | 880 |
| АИР315М(А)6 | 132 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 245 | 1050 |
| АИР315MВ6 | 160 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 300 | 1200 |
| АИР315S8 | 90 | 740 | 93,8 | 0,82 | 6,4 | 1,8 | 2,0 | 178 | 880 |
| АИР315М(А)8 | 110 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 217 | 1050 |
| АИР315MВ8 | 132 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 260 | 1200 |
| АИР355S2 | 250 | 2980 | 95,5 | 0,92 | 6,5 | 1.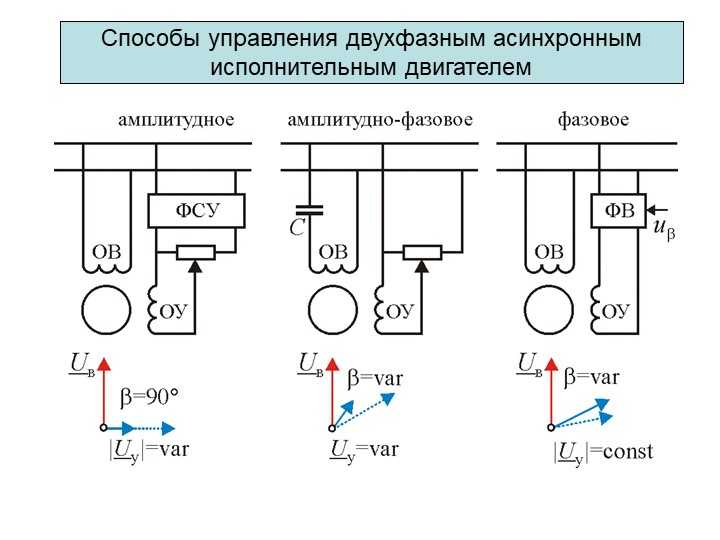 6 6 |
2,3 | 432,3 | 1700 |
| АИР355M2 | 315 | 2980 | 95,6 | 0,92 | 7,1 | 1,6 | 2,2 | 544 | 1790 |
| АИР355S4 | 250 | 1490 | 95,6 | 0,90 | 6,2 | 1,9 | 2,9 | 441 | 1700 |
| АИР355M4 | 315 | 1480 | 95,6 | 0,90 | 6,9 | 2,1 | 2,2 | 556 | 1860 |
| АИР355MА6 | 200 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 292 | 1550 |
| АИР355S6 | 160 | 990 | 95,1 | 0,88 | 6,3 | 1,6 | 2,8 | 291 | 1550 |
| АИР355МВ6 | 250 | 990 | 94,9 | 0,88 | 6,7 | 1,9 | 2,0 | 454,8 | 1934 |
| АИР355L6 | 315 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 457 | 1700 |
| АИР355S8 | 132 | 740 | 94,3 | 0,82 | 6,4 | 1,9 | 2,7 | 259,4 | 1800 |
| АИР355MА8 | 160 | 740 | 93,7 | 0,82 | 6,4 | 1,8 | 2,0 | 261 | 2000 |
| АИР355MВ8 | 200 | 740 | 94,2 | 0,82 | 6,4 | 1,8 | 2,0 | 315 | 2150 |
| АИР355L8 | 132 | 740 | 94,5 | 0,82 | 6,4 | 1,8 | 2,0 | 387 | 2250 |
Виды и типы электродвигателей | Публикации
Электрический двигатель
Электродвигатель представляет собой электрическую машину, которая преобразовывает электроэнергию в энергию вращения вала с незначительными тепловыми потерями. Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
Главный принцип работы любого электродвигателя заключается в использовании электромагнитной индукции в качестве основной движущей силы. Для этого конструкция электродвигателя включает:
- Неподвижную часть (статор или индуктор).
- Подвижную часть (ротор или якорь).
В зависимости от предназначения, применяемого рода тока и конструктивных особенностей электрические двигатели имеют большое количество разновидностей.
Двигатели постоянного тока
Электродвигатели постоянного тока объединяют широкий ассортимент устройств, обеспечивающих высокий КПД при трансформации электрической энергии в механическую. Для надежного соединения электрической цепи подвижной и неподвижной части электропривода постоянного тока используют щеточно-коллекторный узел. В зависимости от конструктивных особенностей щеточно-коллекторного узла, все электрические машины постоянного тока подразделяют на следующие группы:
- Коллекторные.
- Бесколлекторные.
В свою очередь коллекторные электродвигатели условно разделяют на следующие виды:
- Самовозбуждающиеся.

- С возбуждением от электромагнитов постоянного действия.
Устройства с независимым возбуждением характеризуются низкой мощностью, поэтому данные электроприводы используют для не ответственных операций с низкой нагрузкой. Машины с самовозбуждением подразделяют на:
- Устройства с последовательным возбуждением, где якорь подключается последовательно обмотке возбуждения.
- Электродвигатели с параллельным возбуждением, где якорь включается параллельно обмотке возбуждения.
- Электропривод смешанного возбуждения, который характеризуется наличием параллельных и последовательных соединений.
Двигатели переменного тока
Электродвигатели переменного тока представлены широкой номенклатурой устройств, которые различают по многочисленным конструктивным и эксплуатационным характеристикам. В зависимости от скорости вращения ротора выделяют электрические машины синхронного и асинхронного типа.
Синхронные двигатели характеризуются одинаковой скоростью вращения ротора и магнитного поля питающего напряжения. Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Подобный тип электрических двигателей используют для изготовления устройств с высокой мощностью. Кроме этого существует еще одна разновидность синхронного привода — шаговые двигатели. Они имеют строго заданное в пространстве положение ротора, которое фиксируется подачей питания на обмотку статора. При этом переход из одного положения в другое осуществляется посредством подачи напряжения на требуемую обмотку.
Асинхронный электрический двигатель имеет частоту вращения ротора отличную от частоты вращения магнитного поля питающего напряжения. В настоящее время этот тип электродвигателей получил самое широкое распространение как на производстве, так и в быту.
В зависимости от количества фаз питающего напряжения электропривод принадлежит к одной из групп:
- 1-нофазные;
- 2-хфазные;
- 3-хфазные;
- многофазные.
Категория размещения и климатическое исполнение
Все электродвигатели производят с учетом воздействия во время эксплуатации определенных факторов окружающей среды. По этой причине все электрические машины подразделяют на следующие категории размещения:
По этой причине все электрические машины подразделяют на следующие категории размещения:
- Для помещений с высоким уровнем влажности.
- Для помещений закрытого типа с вентиляцией естественного типа без искусственного регулирования климатических параметров. При этом ограничено воздействие пыли, влаги и УФ- излучения.
- В условиях открытого пространства.
- Для помещений закрытого типа с искусственным регулированием климатических параметров. При этом ограничено воздействие пыли, влаги и УФ-излучения.
- Для помещений с изменением влажности и температуры, которые не отличаются от изменений на улице.
В зависимости от климатического исполнения в соответствии с требованиями ГОСТ 15150 — 69 все электрические двигатели подразделяют на следующие типы исполнения:
- Все возможные макроклиматические районы (В).
- Холодный (ХЛ).
- Все морские районы (ОМ).
- Сухой тропический (ТС).
- Общий (О).
- Умеренный (У).
- Умеренный морской (М).
- Влажный тропический (ТВ).
Категория размещения и климатическое исполнение указывают в условном обозначении электродвигателя на его бирке и в паспорте.
Степень защиты корпуса
Для условного обозначения степени защиты корпуса электрической машины от воздействия вредных факторов окружающей среды используют аббревиатуру IP. При этом на корпусе электропривода указывают следующую информацию:
- Высокий уровень защиты от пыли — IP65, IP66.
- Защищенные — не ниже IP21, IP22.
- С защитой от влаги — IP55, IP5.
- С защитой от брызг и капель — IP23, IP24.
- Закрытое исполнение — IP44 — IP54.
- Герметичные — IP67, IP68.
При подборе электрического двигателя для эксплуатации в условиях воздействия определенных вредных факторов, необходимо тщательно подходить к выбору степени защиты его корпуса.
Общие требования безопасности при монтаже и эксплуатации
При монтаже электрического двигателя необходимо придерживаться следующих требований:
- Перед подключением проверить соответствие частоты и напряжения питающей сети с информацией на паспорте электрического двигателя.
- Перед установкой электрической машины обязательно проводят измерение сопротивления электрической изоляции обмотки статора относительно корпуса. При неудовлетворительных значениях проводят просушивание изоляции до достижения требуемого значения.
- При сопряжении валов необходимо точно соблюдать соосность с допустимым отклонением не более 0,2 мм.
- Для заземления корпуса электродвигателя используют только специальные заземляющие устройства, предусмотренные инструкцией завода производителя.
- Строго запрещен монтаж электропривода под напряжением.
В процессе эксплуатации электрических машин следует придерживаться следующих основных правил:
- Регулярный осмотр состояния электродвигателя является залогом своевременного определения неисправностей.
- Регулярно на протяжении всего срока эксплуатации проводят проверку исправности токовой и тепловой защиты, чистку и смазку, проверку контактных соединений и надежности заземления.
- При наличии повышенного шума или стука, проводят вибродиагностику с целью определения состояния подшипников и других вращающихся деталей.

- Следует исключить длительную работу однофазного электродвигателя в режиме холостого хода, что негативно влияет на срок его службы.
- Запрещается эксплуатация электрического двигателя с неисправной защитой от перегрева, перегрузки или завышенным значением сопротивления контура заземления.
Крановые электродвигатели
Крановые электродвигатели представляют собой асинхронные устройства переменного тока или двигатели постоянного тока с параллельным или последовательным возбуждением.
В отличие от других категорий электродвигателей, крановые электроприводы имеют следующие особенности:
- Большинство крановых электрических двигателей имеет закрытое исполнение корпуса.
- Момент инерции на роторе составляет минимально возможное значение, что обеспечивает минимальные потери энергии во время переходных процессов.
- Кратковременная перегрузка по моменту для крановых двигателей постоянного тока составляет 2,0 — 5,0, а для электромоторов переменного тока 2,3 — 3,5.

- Класс нагревостойкости изоляционных материалов не менее F.
- У кранового электропривода переменного тока в номинальном режиме ПВ составляет не менее 80 минут.
- С целью получения большой перегрузочной способности по моменту добиваются высоких значений магнитного потока.
- Отношение максимально допустимой частоты вращения к номинальному значению для электродвигателей постоянного тока составляет 3,5 — 4,9, а для машин переменного тока 2,5.
Эксплуатация кранового привода характеризуется следующими условиями эксплуатации:
- Частые пуски, реверсы и торможения.
- Регулирование частоты вращения в широком диапазоне значений.
- Повышенная вибрация и тряски.
- Повторно-кратковременный режим работы.
- Воздействие высокой температуры, газа, пыли и пара.
- Значительная перегрузка во время работы.
Общепромышленные электрические двигатели
Электродвигатели общепромышленного исполнения применяют для привода механизмов, которые не предъявляют особых требований к показателям КПД, энергосбережения, скольжению и пусковым характеристикам. Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
Они характеризуются повторно-кратковременным режимом работы и изоляцией с классом нагревостойкости класса F. Наиболее популярными в этой категории являются асинхронные электрические двигатели марки АИР с короткозамкнутым ротором. Благодаря многочисленным достоинствам, этот тип электропривода с успехом применяется на всех производственных предприятиях. От продукции других торговых марок его отличает:
- Простая конструкция с отсутствием подвижных контактов.
- Низкая стоимость в сравнении с электрическими машинами других типов.
- Высокая ремонтопригодность всех главных узлов и рабочих элементов.
- Использование напряжения сети 380 В без дополнительных регуляторов или фильтров.
- Монтаж двигателя осуществляется на лапах или фланцах, поэтому происходит в минимально короткий срок.
Электрические машины общепромышленного исполнения находят применение в сферах деятельности, где нет необходимости в высоких эксплуатационных параметрах: вентиляционные системы, насосные станции, станочное оборудование, компрессорные установки и др. Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Эксплуатация общепромышленных электродвигателей осуществляется в двух основных режимах: генераторный и двигательный. При этом в генераторном режиме электрические двигатели являются источником электроэнергии за счет преобразования механической энергии вращения вала. В двигательном режиме привод общепромышленного исполнения потребляет электроэнергию и превращает её в механическую энергию вращения вала.
Электрические двигатели с электромагнитным тормозом
Электрический привод с электромагнитным тормозом предназначен для эксплуатации в повторно-кратковременном или кратковременном режиме. Он разработан специально для механизмов, которые требуют форсированной остановки в строго регламентированное время. К таким механизмам относят: электрические тали, автоматизированные складские системы, обрабатывающие станки и др. Тормозной механизм, как правило, располагают со стороны противоположной валу двигателя. Он обеспечивает быстрое торможение электрического привода при отключении питания, а при повторной подаче напряжения растормаживает его.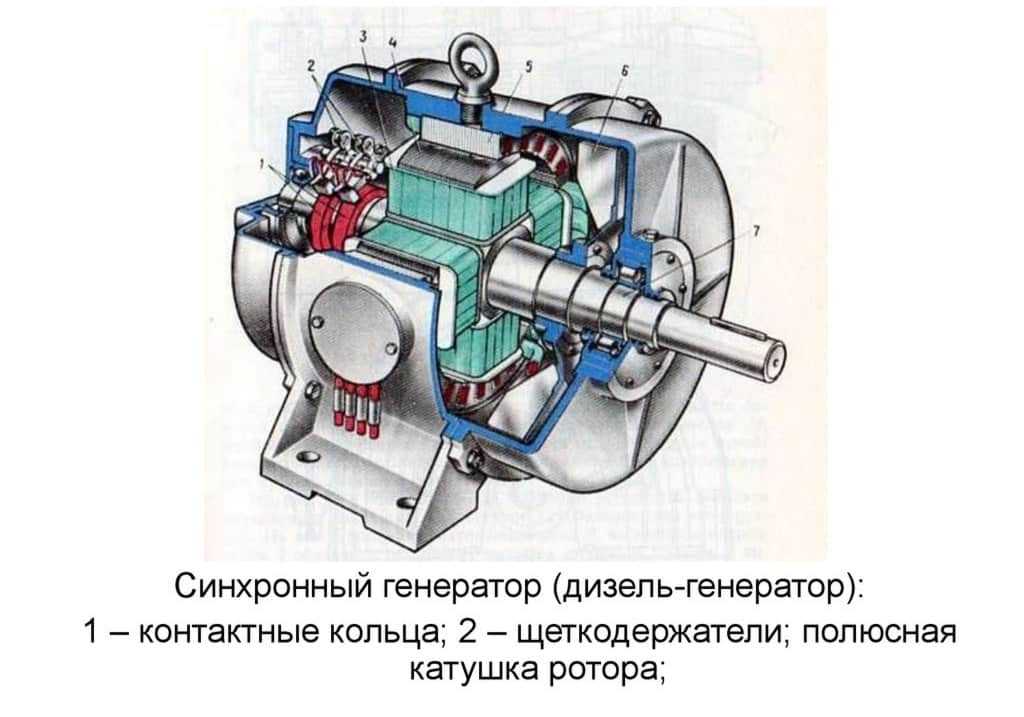
Электрические машины со встроенным электромагнитным тормозом работают по следующему принципу:
- Электромагнитную катушку тормоза подключают последовательно к одной из фазных обмоток электродвигателя.
- Катушка получает постоянное напряжение посредством выпрямляющего устройства, которое располагают возле коробки с выводами или переменное напряжение непосредственно с обмотки электродвигателя.
- При отсутствии фазного напряжения катушка обесточивается, и якорь прочно зажимает блокировочный механизм.
- После восстановления электрического питания катушка подтягивает якорь, что позволяет валу двигателя свободно перемещаться.
В зависимости от способа монтажа электромоторы со встроенным электромагнитным тормозом изготавливают в следующих исполнениях:
- С горизонтальным валом.
- С вертикальным валом.
Благодаря своим преимуществам по времени остановки вала электродвигателя, этот тип электропривода обеспечивает надежную и безопасную эксплуатацию устройств с высокими требованиями к позиционированию или аварийной остановке.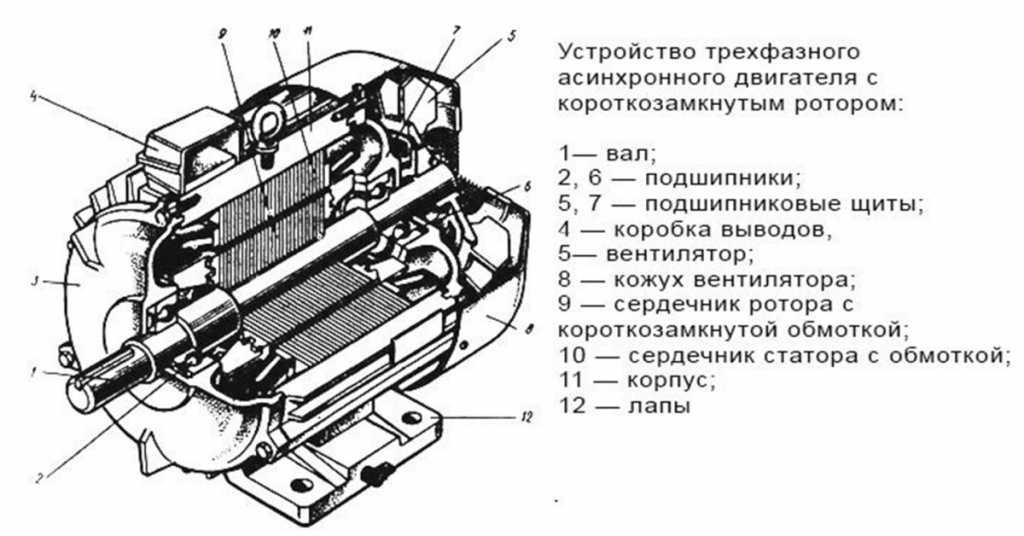
Типи електродвигунів, принципи їх роботи та особливості
Складно недооцінити роль сучасних електродвигунів. Це промислові і побутові агрегати, що виконують різну роботу: від забезпечення працездатності будівельної техніки до виконання виробничих завдань. На українському ринку великою популярністю користуються мотори змінного струму. Це однофазні і трифазні агрегати, які використовуються в різних умовах. Особливо затребувана серія АИР. У деяких випадках доречніше застосування електродвигунів постійного струму. Вони володіють унікальними особливостями. Сьогодні ми обговоримо типи моторів, чим відрізняються різні моделі (числом оборотів, кліматичним виконанням і ін), звернемо увагу на серію асинхронних двигунів АИР.
Види електричних двигунів і принципи їх роботи
Електродвигуном називають пристрій, що перетворює електричну енергію в механічну. Саме тому його ключовими характеристиками є потужність і число оборотів в хвилину. Переважна більшість однофазних, трифазних та інших моторів складається з двох частин: ротора і статора. Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Подаючи електрика на даний агрегат, можна домогтися обертання рухомого елемента.
Існує безліч способів класифікації електродвигунів. Початковим є поділ за типом живлення. Виділяють два види двигунів:
- постійного струму;
- змінного струму.
Чим відрізняються вони один від одного у використанні? Двигуни постійного струму характеризуються рівномірним обертанням. Їх встановлюють в електротранспорті, бурових верстатах, підйомно-транспортних машинах і т. д. Двигуни змінного струму дешевше у виготовленні, надійніше в експлуатації. Вони також поділяються на різні додаткові типи:
- побутові та промислові;
- синхронні і асинхронні;
- однофазні і трифазні.
Яскравим представником пристроїв даного типу є електродвигун АИР. Це асинхронний двигун змінного струму, який знайшов собі застосування в промисловій та побутовій сфері. Двигуни АИР випускаються як в однофазному (живляться від мережі 220 В), так і в трифазному виконанні. На ринку можна знайти безліч подібних моторів з різним числом обертів.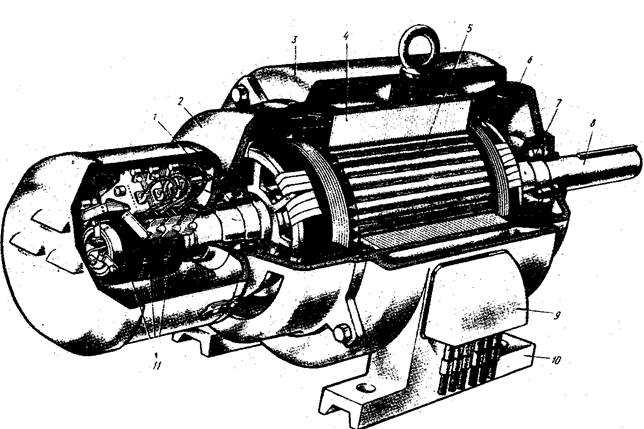 Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Якщо говорити про те, чим відрізняються електродвигуни АИР від інших схожих типів агрегатів, то тут можна виділити компактні габарити, простоту конструкції, легкість обслуговування. Більш докладно ці однофазні і трифазні пристрої розглянемо в іншому розділі статті.
Двигуни постійного струму
Обговорюючи типи сучасних електродвигунів, прийнято починати з пристроїв постійного струму. Це складні пристрої, здатні видавати велику потужність і кількість обертів. За характером порушення вони поділяються на:
- незалежні;
- паралельні;
- послідовні;
- змішані.
У кожного типу є свої особливості і рекомендацію по застосуванню. Наприклад, двигуни з незалежним збудженням не можна запускати без навантаження. Дотримання правил експлуатації — гарантія стабільної та ефективної роботи двигуна постійного струму.
До основних переваг даних агрегатів відносять:
- екологічність і надійність;
- можливість застосування в ролі генератора;
- швидкий запуск, легке управління;
- компактні габарити і просту конструкцію.

Чим відрізняються електродвигуни цього типу від двигунів змінного струму? Основний момент — можливість плавного регулювання швидкості обертання (кількості оборотів) вала. Саме це визначає якість побутове та промислове застосування даних машин.
Електродвигуни змінного струму
Як ми вже говорили, електродвигуни змінного струму є найбільш затребуваними. Їх частіше можна зустріти як в побутових, так і в промислових умовах. Вони поділяються на синхронні та асинхронні, бувають однофазними і трифазними. Розглянемо кожен тип більш докладно.
Синхронні двигуни змінного струму
Почнемо з синхронних пристроїв. Число оборотів в хвилину їх ротора дорівнює частоті обертання МП. Це забезпечує стабільну швидкість двигунів даного типу. Застосування досить широко: компресори, насоси, генератори, вентилятори і т. д.
Особливості асинхронних електродвигунів
В асинхронних електродвигунах частота обертання магнітного поля не співпадає з кількістю оборотів в хвилину ротора. Існує два види подібних двигунів змінного струму: з короткозамкненою рухомою частиною і з фазною. В залежності від типу електроланцюга, асинхронні двигуни поділяються на однофазні і трифазні. Чим відрізняються? Перші частіше використовуються в побутових умовах, а другі актуальні для промислових об’єктів. Асинхронні електродвигуни АИР випускаються в обох варіантах. Ключові переваги:
Існує два види подібних двигунів змінного струму: з короткозамкненою рухомою частиною і з фазною. В залежності від типу електроланцюга, асинхронні двигуни поділяються на однофазні і трифазні. Чим відрізняються? Перші частіше використовуються в побутових умовах, а другі актуальні для промислових об’єктів. Асинхронні електродвигуни АИР випускаються в обох варіантах. Ключові переваги:
- універсальність до експлуатації;
- величезна різноманітність моделей;
- ремонтопридатність, надійність корпусу;
- невеликі габарити при високій потужності;
- низький рівень видаваного шуму;
- високий ККД і тривалий термін служби.
Вибираючи однофазні або трифазні асинхронні двигуни АИР, враховуйте особливості місця їх застосування. Ці промислові та побутові агрегати випускаються в різних кліматичних виконаннях. Тому вивчаючи їх характеристики, звертайте увагу не тільки на потужність і число обертів.
Однофазні та трифазні, синхронні і асинхронні, АИР або інших серій — електродвигуни застосовуються в побутовій і промисловій сфері, де полегшують працю людини і вирішують завдання, які без них нездійсненні.
Виды и типы электродвигателей – постоянного и переменного тока, синхронные и асинхронные
Электрические машины (электродвигатели), преобразовывающие электроэнергию в механическую имеют широкую сферу применения и повсеместно используются в быту и на производстве.
Несмотря на типовое конструктивное исполнение (наличие неподвижного статора или индуктора и вращающегося ротора или якоря) и принцип действия эти устройства разделяются на виды имеющими свои особенности:
- тип и значение напряжения питания;
- характер синхронизации рабочего поля с частотой вращения ротора.
С преимуществами и недостатками каждого вида стоит ознакомиться заранее.
КЛАССИФИКАЦИЯ И ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
Одним из основных параметров классификации является тип напряжения питания:
- постоянное;
- переменное.
Двигатели постоянного тока, подключаются к аккумуляторам, солнечным батареям или блокам питания. Данная группа представлена двигателями с возможностью самосинхронизации, повышенной перегрузочной способностью и равномерностью вращения.
Из-за потребности в источнике постоянного напряжения их применение ограничено, но именно этот вид двигателей используется при необходимости точной и быстрой регулировки электроприводов с высокой мощностью.
Двигатели переменного тока являются более универсальными и имеют широкую сферу применения. Этот тип электродвигателей имеет простую конструкцию со статором из ферромагнитных пластин и устанавливается практически везде – от бытовых приборов до приводов тяжелого оборудования.
Похожее исполнение и принцип действия с электродвигателями постоянного тока имеют двигатели пульсирующего тока и универсальные устройства, работающие на обоих видах питания.
Первые устанавливаются на электровозах и подключаются через соответствующие выпрямители. Вторые применяются при необходимости получения частоты вращения свыше стандартных 3000 об/мин и чаще всего устанавливаются в бытовой технике, работающей и от аккумуляторов, и от обычной сети.
В зависимости от конструкции электродвигатели постоянного тока разделяются на коллекторные, оснащенные щеточно-коллекторным узлом, и бесколлекторные (они же – вентильные). Первые в свою очередь разделяются на виды с самовозбуждением (параллельным, последовательным или смешанным) или с независимым возбуждением обмотки.
Первые в свою очередь разделяются на виды с самовозбуждением (параллельным, последовательным или смешанным) или с независимым возбуждением обмотки.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
В зависимости от принципа действия и характера взаимодействия с электромагнитным полем полем двигатели переменного тока разделяются на:
- синхронные;
- асинхронные.
У первых угловая скорость магнитного поля статора всегда совпадает или движется дискретно частоте вращения ротора.
Устройство таких двигателей таких типов бывает разным: мощные виды синхронных двигателей практически всегда имеют на якоре обмотку возбуждения, устройства с малой и средней мощностью оснащаются постоянным магнитами.
Также в группу синхронных входят модели с питанием обмотки от полупроводниковых элементов (вентильные реактивные электродвигатели) и устройства с шаговым угловым перемещением ротора.
Асинхронные электрические машины имеют самую широкую сферу применения и наиболее распространены в быту и производстве.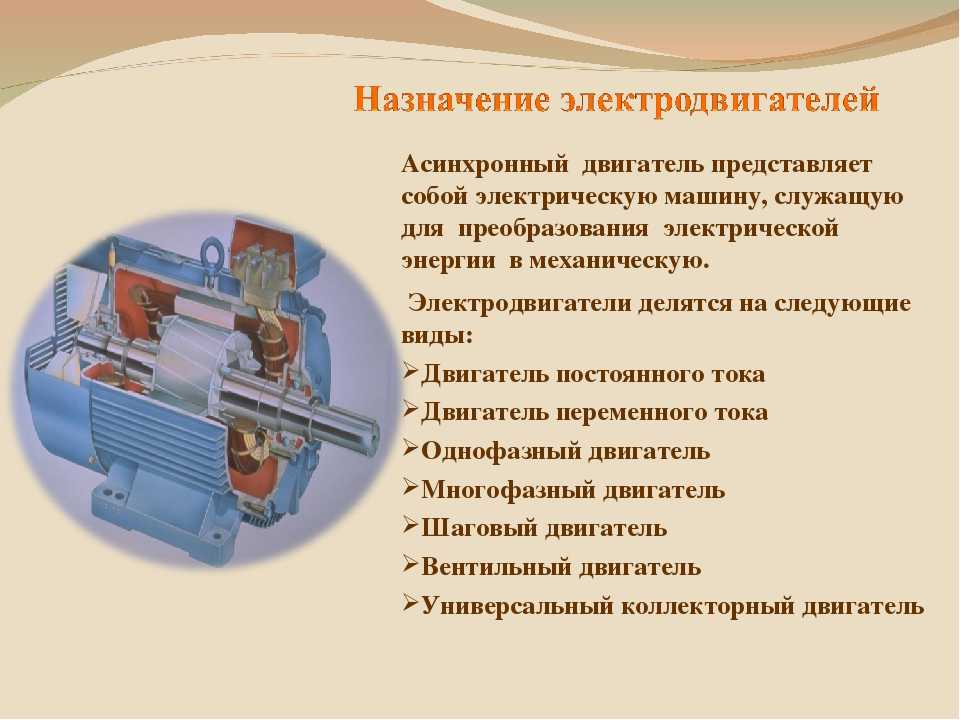
Данная группа представлена электродвигателями с разным числом фаз на обмотке (одно-, двух-, трех- и многофазные) и исполнением ротора (фазным и короткозамкнутым). Конструкция статора при этом практически едина, разница проявляется только в вариантах исполнения обмотки.
Помимо основных параметров (типа напряжения питания, синхронизации э/м поля с частотой вращения и исполнением статора и ротора) все электродвигатели условно разделяются на:
1. Модели с разной категорией и климатическим исполнением. Основным ориентиром при выборе конкретного типа служит советский, но все еще действующий ГОСТ 15150-69.
2. Виды с разной степенью пыле- и влагозащиты корпуса – от IP21 до IP68.
3. Двигатели для повторно-кратковременного запуска или продолжительного применения в рабочем режиме. Примером первых служат системы электропривода кранов, лебедок или шиберов, вторых – э/д насосов, вентиляторов или другого непрерывно работающего оборудования.
4. Устройства с малой, средней и большой мощностью.
ДОСТОИНСТВА И НЕДОСТАТКИ РАЗЛИЧНЫХ ТИПОВ ЭЛЕКТРИЧЕСКИХ ДВИГАТЕЛЕЙ
Постоянного тока.
Рабочие характеристики электродвигателей этого вида во многом зависят от типа подключения обмотки возбуждения.
При последовательном возбуждении достигается максимально высокий момент на валу, но увеличиваются риски ухода системы «в разнос», при параллельном – при меньшем моменте более стабильны обороты, при смешанном – возникает возможность регулировки обеих параметров.
Лучшие показатели в плане точности регулировки пускового момента и скорости имеют двигатели с независимым возбуждением, имеющие возможности регулировки параметров вне зависимости от нагрузки на валу.
Свою роль играет и конструктивное исполнение. Виды с коллекторно-щеточным узлом имеют доступную стоимость и простую регулировку, но склонны к относительно быстрому износу и перегреву. Вентильные бесконтактные электродвигатели характеризуются повышенным КПД и долгим сроком службы, но стоят дороже.
К общим преимуществам постоянников относят:
- возможность и несложную реализацию регулировки частоты вращения;
- сравнительную простоту исполнения;
- отличные пусковые свойства;
- возможность эксплуатации в режиме электродвигателя и генератора;
- компактные габариты.
Минусы проявляются в ограничении применения по типу питания, высокой себестоимости, сложности в эксплуатации и повышенном износе у коллекторных разновидностей. Щетки в узле при необходимости меняются, но это требует дополнительных средств и времени.
Несмотря на недостатки, применение этого типа электродвигателей признано оптимальным при оснащении подъемного, бурового и ряда производственного оборудования. Именно ими оснащают привода эскалаторов, электротранспорта, типографских станков и работающего от батарей ручного электро инструмента.
Синхронные электродвигатели переменного тока.
Преимущества этого вида проявляются в стабильности частоты в пределах заданной нагрузки, сопротивляемости перегрузкам, эргономичности и минимальной чувствительности к перепадам напряжения. При необходимости они могут использоваться в качестве генераторов.
При необходимости они могут использоваться в качестве генераторов.
Минусы определяются усложненной конструкцией двигателя, более трудным пуском и проблемами при регулировке скорости. Последний параметр остается стабильным и меняется лишь при изменении частоты тока питания. Применение этих видов считается оправданным при мощности потребления свыше 100 Вт, в остальных случаях они замещаются асинхронными видами.
Максимальный эффект достигается при их вводе в системы привода компрессоров, насосных станций, крупногабаритных вентиляторов и аналогичного промышленного оборудования.
Асинхронные двигатели.
Показатели машин этого типа напрямую зависят от числа фаз обмотки и ее исполнения. Наиболее востребованный вид – трехфазный асинхронный с короткозамкнутым ротором используется практически везде, от бытовой техники до промышленных станков и машин. Тот же тип со встроенной многофазной обмоткой признан самым совершенным и надежным.
Востребованность асинхронных электродвигателей объясняется простотой производства (и как следствие – более низкой себестоимостью), надежностью и низкими расходами при применении.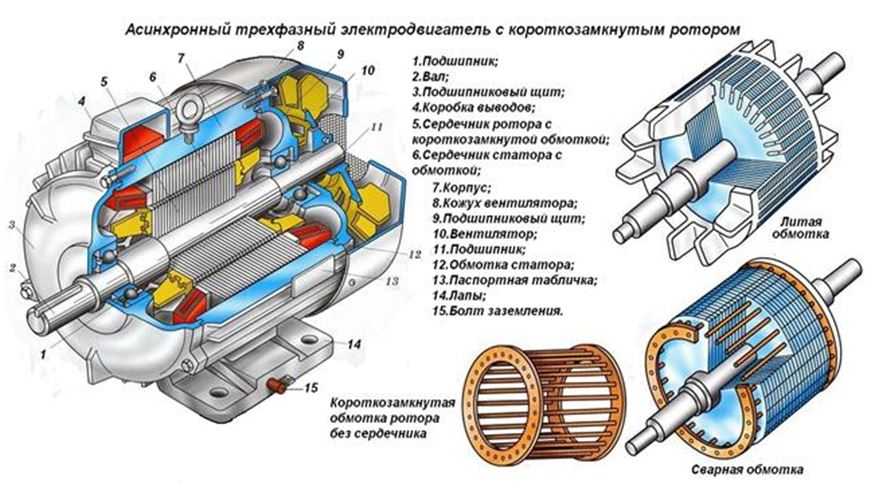
Назвать их идеальными нельзя, этот тип имеет небольшой пусковой момент, ограниченный коэффициент мощности, зависимость от перепадов напряжения и слабую регулировки скорости.
Последние два недостатки устраняется вводом в схемы частотного преобразователя, в целом плюсы асинхронных устройств преобладают над минусами.
* * *
© 2014-2022 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер, могут выражать мнение автора и не подлежат использованию в качестве руководящих и нормативных документов.
какие они бывают / Хабр
В прошлых статьях был рассмотрен принцип работы синхронного и асинхронного электродвигателей, а также рассказано, как ими управлять. Но видов электродвигателей существует гораздо больше! И у каждого из них свои свойства, область применения и особенности.
В этой статье будет небольшой обзор по разным типам электродвигателей с фотографиями и примерами применений. Почему в пылесос ставятся одни двигатели, а в вентилятор вытяжки другие? Какие двигатели стоят в сегвее? А какие двигают поезд метро?
Каждый электродвигатель обладает некоторыми отличительными свойствами, которые обуславливают его область применения, в которой он наиболее выгоден. Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
Синхронные, асинхронные, постоянного тока, коллекторные, бесколлекторные, вентильно-индукторные, шаговые… Почему бы, как в случае с двигателями внутреннего сгорания, не изобрести пару типов, довести их до совершенства и ставить их и только их во все применения? Давайте пройдемся по всем типам электродвигателей, а в конце обсудим, зачем же их столько и какой двигатель «самый лучший».
С этим двигателем все должны быть знакомы с детства, потому что именно этот тип двигателя стоит в большинстве старых игрушек. Батарейка, два проводка на контакты и звук знакомого жужжания, вдохновляющего на дальнейшие конструкторские подвиги. Все ведь так делали? Надеюсь. Иначе эта статья, скорее всего, не будет вам интересна. Внутри такого двигателя на валу установлен контактный узел – коллектор, переключающий обмотки на роторе в зависимости от положения ротора. Постоянный ток, подводимый к двигателю, протекает то по одним, то по другим частям обмотки, создавая вращающий момент. Кстати, не уходя далеко, всех ведь, наверное, интересовало – что за желтые штучки стояли на некоторых ДПТ из игрушек, прямо на контактах (как на фото сверху)? Это конденсаторы – при работе коллектора из-за коммутаций потребление тока импульсное, напряжение может также меняться скачками, из-за чего двигатель создает много помех. Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Они особенно мешают, если ДПТ установлен в радиоуправляемой игрушке. Конденсаторы как раз гасят такие высокочастотные пульсации и, соответственно, убирают помехи.
Двигатели постоянного тока бывают как очень маленького размера («вибра» в телефоне), так и довольно большого – обычно до мегаватта. Например, на фото ниже показан тяговый электродвигатель электровоза мощностью 810кВт и напряжением 1500В.
Почему ДПТ не делают мощнее? Главная проблема всех ДПТ, а в особенности ДПТ большой мощности – это коллекторный узел. Скользящий контакт сам по себе является не очень хорошей затеей, а скользящий контакт на киловольты и килоамперы – и подавно. Поэтому конструирование коллекторного узла для мощных ДПТ – целое искусство, а на мощности выше мегаватта сделать надежный коллектор становится слишком сложно (рекорд — 12,5МВт).
В потребительском качестве ДПТ хорош своей простотой с точки зрения управляемости. Его момент прямо пропорционален току якоря, а частота вращения (по крайней мере холостой ход) прямо пропорциональна приложенному напряжению. Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Поэтому до наступления эры микроконтроллеров, силовой электроники и частотного регулируемого привода переменного тока именно ДПТ был самым популярным электродвигателем для задач, где требуется регулировать частоту вращения или момент.
Также нужно упомянуть, как именно в ДПТ формируется магнитный поток возбуждения, с которым взаимодействует якорь (ротор) и за счет этого возникает вращающий момент. Этот поток может делаться двумя способами: постоянными магнитами и обмоткой возбуждения. В небольших двигателях чаще всего ставят постоянные магниты, в больших – обмотку возбуждения. Обмотка возбуждения – это еще один канал регулирования. При увеличении тока обмотки возбуждения увеличивается её магнитный поток. Этот магнитный поток входит как в формулу момента двигателя, так и в формулу ЭДС. Чем выше магнитный поток возбуждения, тем выше развиваемый момент при том же токе якоря. Но тем выше и ЭДС машины, а значит при том же самом напряжении питания частота вращения холостого хода двигателя будет ниже. Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Зато если уменьшить магнитный поток, то при том же напряжении питания частота холостого хода будет выше, уходя в бесконечность при уменьшении потока возбуждения до нуля. Это очень важное свойство ДПТ. Вообще, я очень советую изучить уравнения ДПТ – они простые, линейные, но их можно распространить на все электродвигатели – процессы везде схожие.
Как ни странно, это самый распространенный в быту электродвигатель, название которого наименее известно. Почему так получилось? Его конструкция и характеристики такие же, как у двигателя постоянного тока, поэтому упоминание о нем в учебниках по приводу обычно помещается в самый конец главы про ДПТ. При этом ассоциация коллектор = ДПТ так прочно заседает в голове, что не всем приходит на ум, что двигатель постоянного тока, в названии которого присутствует «постоянный ток», теоретически можно включать в сеть переменного тока. Давайте разберемся.
Как изменить направление вращения двигателя постоянного тока? Это знают все, надо сменить полярность питания якоря. А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
А ещё? А еще можно сменить полярность питания обмотки возбуждения, если возбуждение сделано обмоткой, а не магнитами. А если полярность сменить и у якоря, и у обмотки возбуждения? Правильно, направление вращения не изменится. Так что же мы ждем? Соединяем обмотки якоря и возбуждения последовательно или параллельно, чтобы полярность изменялась одинаково и там и там, после чего вставляем в однофазную сеть переменного тока! Готово, двигатель будет крутиться. Есть один только маленький штрих, который надо сделать: так как по обмотке возбуждения протекает переменный ток, её магнитопровод, в отличие от истинного ДПТ, надо изготовить шихтованным, чтобы снизить потери от вихревых токов. И вот мы и получили так называемый «универсальный коллекторный двигатель», который по конструкции является подвидом ДПТ, но… прекрасно работает как от переменного, так и от постоянного тока.
Этот тип двигателей наиболее широко распространен в бытовой технике, где требуется регулировать частоту вращения: дрели, стиральные машины (не с «прямым приводом»), пылесосы и т. п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
п. Почему именно он так популярен? Из-за простоты регулирования. Как и в ДПТ, его можно регулировать уровнем напряжения, что для сети переменного тока делается симистором (двунаправленным тиристором). Схема регулирования может быть так проста, что помещается, например, прямо в «курке» электроинструмента и не требует ни микроконтроллера, ни ШИМ, ни датчика положения ротора.
Еще более распространенным, чем коллекторные двигатели, является асинхронный двигатель. Только распространен он в основном в промышленности – где присутствует трехфазная сеть. Про принцип его работы написана отдельная статья. Если кратко, то его статор – это распределенная двухфазная или трехфазная (реже многофазная) обмотка. Она подключается к источнику переменного напряжения и создает вращающееся магнитное поле. Ротор можно представлять себе в виде медного или алюминиевого цилиндра, внутри которого находится железо магнитопровода. К ротору в явном виде напряжение не подводится, но оно индуцируется там за счет переменного поля статора (поэтому двигатель на английском языке называют индукционным). Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Возникающие вихревые токи в короткозамкнутом роторе взаимодействуют с полем статора, в результате чего образуется вращающий момент.
Почему асинхронный двигатель так популярен? У него нет скользящего контакта, как у коллекторного двигателя, а поэтому он более надежен и требует меньше обслуживания. Кроме того, такой двигатель может пускаться от сети переменного тока «прямым пуском» – его можно включить коммутатором «на сеть», в результате чего двигатель запустится (с большим пусковым током 5-7 крат, но допустимым). ДПТ относительно большой мощности так включать нельзя, от пускового тока погорит коллектор. Также асинхронные привода, в отличие от ДПТ, можно делать гораздо большей мощности – десятки мегаватт, тоже благодаря отсутствию коллектора. При этом асинхронный двигатель относительно прост и дешев.
Асинхронный двигатель применяется и в быту: в тех устройствах, где не нужно регулировать частоту вращения. Чаще всего это так называемые «конденсаторные» двигатели, или, что тоже самое, «однофазные» асинхронники. Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Хотя на самом деле с точки зрения электродвигателя правильнее говорить «двухфазные», просто одна фаза двигателя подключается в сеть напрямую, а вторая через конденсатор. Конденсатор делает фазовый сдвиг напряжения во второй обмотке, что позволяет создать вращающееся эллиптическое магнитное поле. Обычно такие двигатели применяются в вытяжных вентиляторах, холодильниках, небольших насосах и т.п.
Минус асинхронного двигателя по сравнению с ДПТ в том, что его сложно регулировать. Асинхронный электродвигатель – это двигатель переменного тока. Если асинхронному двигателю просто понизить напряжение, не понизив частоту, то он несколько снизит скорость, да. Но у него увеличится так называемое скольжение (отставание частоты вращения от частоты поля статора), увеличатся потери в роторе, из-за чего он может перегреться и сгореть. Можно представлять это себе как регулирование скорости движения легкового автомобиля исключительно сцеплением, подав полный газ и включив четвертую передачу. Чтобы правильно регулировать частоту вращения асинхронного двигателя нужно пропорционально регулировать и частоту, и напряжение.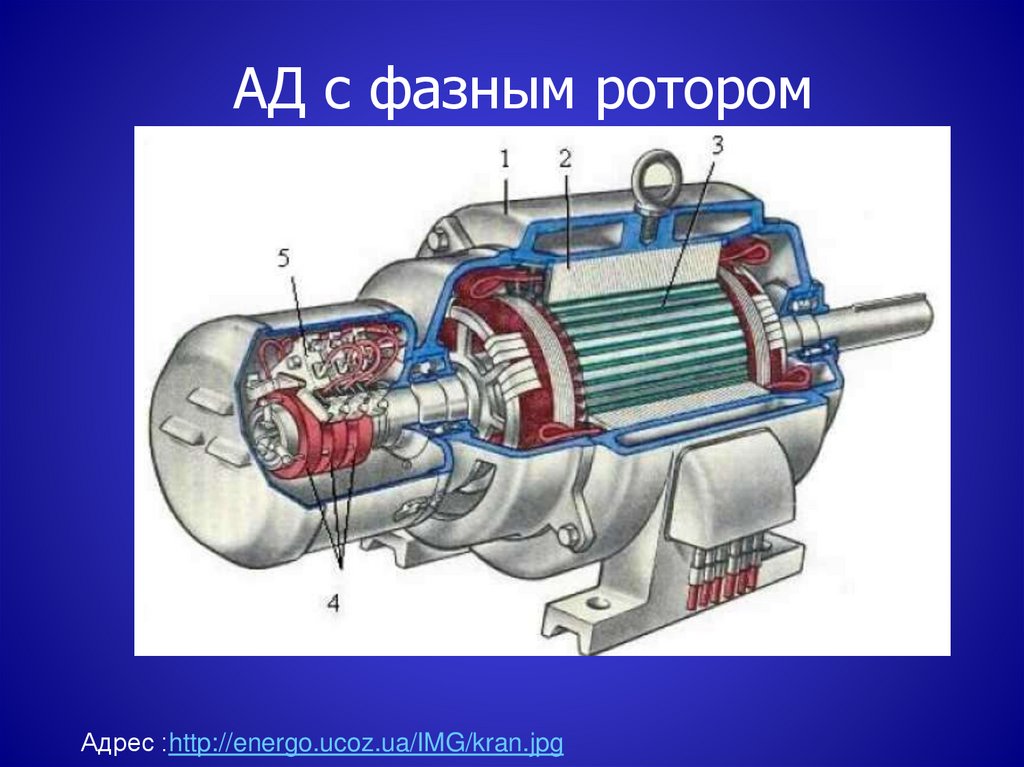 А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
А лучше и вовсе организовать векторное управление, как более подробно было описано в прошлой статье. Но для этого нужен преобразователь частоты – целый прибор с инвертором, микроконтроллером, датчиками и т.п. До эры силовой полупроводниковой электроники и микропроцессорной техники (в прошлом веке) регулирование частотой было экзотикой – его не на чем было делать. Но сегодня регулируемый асинхронный электропривод на базе преобразователя частоты – это уже стандарт-де-факто.
Про принцип работы синхронного двигателя также была отдельная статья. Синхронных приводов бывает несколько подвидов – с магнитами (PMSM) и без (с обмоткой возбуждения и контактными кольцами), с синусоидальной ЭДС или с трапецеидальной (бесколлекторные двигатели постоянного тока, BLDC). Сюда же можно отнести некоторые шаговые двигатели. До эры силовой полупроводниковой электроники уделом синхронных машин было применение в качестве генераторов (почти все генераторы всех электростанций – синхронные машины), а также в качестве мощных приводов для какой-либо серьезной нагрузки в промышленности.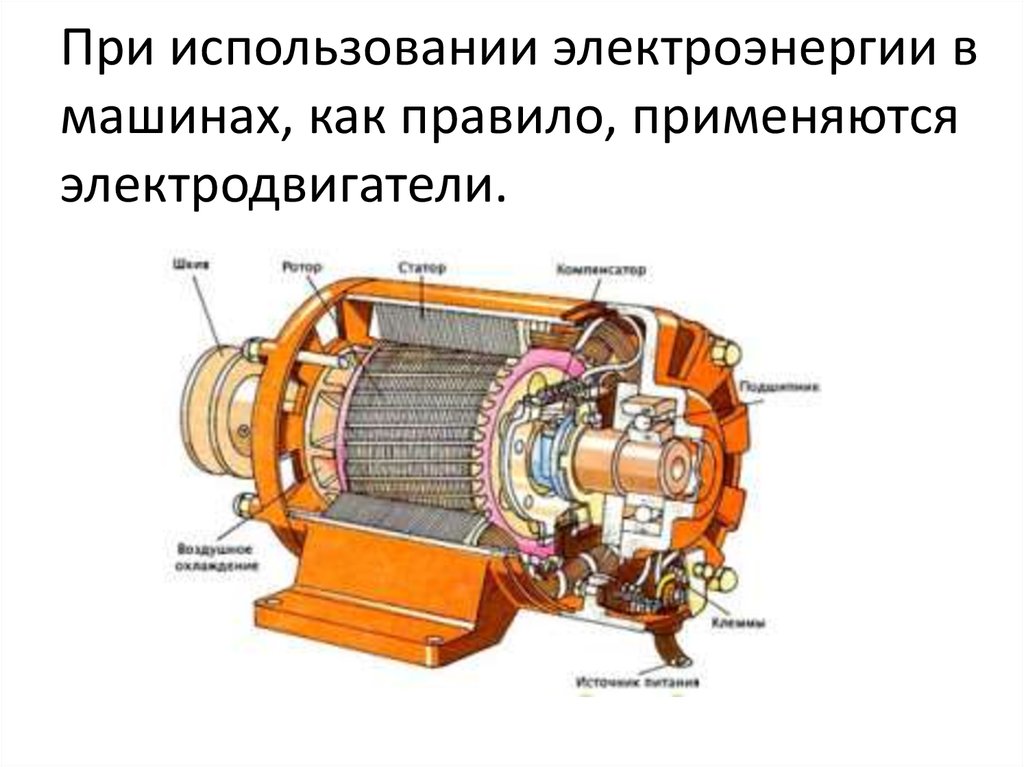
Все эти машины выполнялись с контактными кольцами (можно увидеть на фото), о возбуждении от постоянных магнитов при таких мощностях речи, конечно же, не идет. При этом у синхронного двигателя, в отличие от асинхронного, большие проблемы с пуском. Если включить мощную синхронную машину напрямую на трехфазную сеть, то всё будет плохо. Так как машина синхронная, она должна вращаться строго с частотой сети. Но за время 1/50 секунды ротор, конечно же, разогнаться с нуля до частоты сети не успеет, а поэтому он будет просто дергаться туда-сюда, так как момент получится знакопеременный. Это называется «синхронный двигатель не вошел в синхронизм». Поэтому в реальных синхронных машинах применяют асинхронный пуск – делают внутри синхронной машины небольшую асинхронную пусковую обмотку и закорачивают обмотку возбуждения, имитируя «беличью клетку» асинхронника, чтобы разогнать машину до частоты, примерно равной частоте вращения поля, а уже после этого включается возбуждение постоянным током и машина втягивается в синхронизм.
И если у асинхронного двигателя регулировать частоту ротора без изменения частоты поля хоть как-то можно, то у синхронного двигателя нельзя никак. Он или крутится с частой поля, или выпадает из синхронизма и с отвратительными переходными процессами останавливается. Кроме того, у синхронного двигателя без магнитов есть контактные кольца – скользящий контакт, чтобы передавать энергию на обмотку возбуждения в роторе. С точки зрения сложности, это, конечно, не коллектор ДПТ, но всё равно лучше бы было без скользящего контакта. Именно поэтому в промышленности для нерегулируемой нагрузки применяют в основном менее капризные асинхронные привода.
Но все изменилось с появлением силовой полупроводниковой электроники и микроконтроллеров. Они позволили сформировать для синхронной машины любую нужную частоту поля, привязанную через датчик положения к ротору двигателя: организовать вентильный режим работы двигателя (автокоммутацию) или векторное управление. При этом характеристики привода целиком (синхронная машина + инвертор) получились такими, какими они получаются у двигателя постоянного тока: синхронные двигатели заиграли совсем другими красками. Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
Поэтому начиная где-то с 2000 года начался «бум» синхронных двигателей с постоянными магнитами. Сначала они робко вылезали в вентиляторах кулеров как маленькие BLDC двигатели, потом добрались до авиамоделей, потом забрались в стиральные машины как прямой привод, в электротягу (сегвей, Тойота приус и т.п.), всё больше вытесняя классический в таких задачах коллекторный двигатель. Сегодня синхронные двигатели с постоянными магнитами захватывают всё больше применений и идут семимильными шагами. И все это – благодаря электронике. Но чем же лучше синхронный двигатель асинхронного, если сравнивать комплект преобразователь+двигатель? И чем хуже? Этот вопрос будет рассматриваться в конце статьи, а сейчас давайте пройдемся еще по нескольким типам электродвигателей.
У него много названий. Обычно его коротко называют вентильно-индукторный двигатель (ВИД) или вентильно-индукторная машина (ВИМ) или привод (ВИП). В английской терминологии это switched reluctance drive (SRD) или motor (SRM), что переводится как машина с переключаемым магнитным сопротивлением. Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Но чуть ниже будет рассматриваться другой подвид этого двигателя, отличающийся по принципу действия. Чтобы не путать их друг с другом, «обычный» ВИД, который рассмотрен в этом разделе, мы на кафедре электропривода в МЭИ, а также на фирме ООО «НПФ ВЕКТОР» называем «вентильно-индукторный двигатель с самовозбуждением» или коротко ВИД СВ, что подчеркивает принцип возбуждения и отличает его от машины, рассмотренной далее. Но другие исследователи его также называют ВИД с самоподмагничиванием, иногда реактивный ВИД (что отражает суть образования вращающего момента).
Конструктивно это самый простой двигатель и по принципу действия похож на некоторые шаговые двигатели. Ротор – зубчатая железка. Статор – тоже зубчатый, но с другим числом зубцов. Проще всего принцип работы поясняет вот эта анимация:
Подавая постоянный ток в фазы в соответствии с текущим положением ротора можно заставить двигатель вращаться. Фаз может быть разное количество. Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Форма тока реального привода для трех фаз показа на рисунке (токоограничение 600А):
Однако за простоту двигателя приходится платить. Так как двигатель питается однополярными импульсами тока, напрямую «на сеть» его включать нельзя. Обязательно требуется преобразователь и датчик положения ротора. Причем преобразователь не классический (типа шестиключевой инвертор): для каждой фазы у преобразователя для SRD должны быть полумосты, как на фото в начале этого раздела. Проблема в том, что для удешевления комплектующих и улучшения компоновки преобразователей силовые ключи и диоды часто не изготавливаются отдельно: обычно применяются готовые модули, содержащие одновременно два ключа и два диода – так называемые стойки. И именно их чаще всего и приходится ставить в преобразователь для ВИД СВ, половину силовых ключей просто оставляя незадействованной: получается избыточный преобразователь. Хотя в последние годы некоторые производители IGBT модулей выпустили изделия, предназначенные именно для SRD.
Следующая проблема – это пульсации вращающего момента. В силу зубчатой структуры и импульсного тока момент редко получается стабильным – чаще всего он пульсирует. Это несколько ограничивает применимость двигателей для транспорта – кому хочется иметь пульсирующий момент на колесах? Кроме того, от таких импульсов тянущего усилия не очень хорошо себя чувствуют подшипники двигателя. Проблема несколько решается специальным профилированием формы тока фазы, а также увеличением количества фаз.
Однако даже при этих недостатках двигатели остаются перспективными в качестве регулируемого привода. Благодаря их простоте сам двигатель получается дешевле классического асинхронного двигателя. Кроме того, двигатель легко сделать многофазным и многосекционным, разделив управление одним двигателем на несколько независимых преобразователей, которые работают параллельно. Это позволяет повысить надежность привода – отключение, скажем, одного из четырех преобразователей не приведет к остановке привода в целом – трое соседей будут какое-то время работать с небольшой перегрузкой. Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Для асинхронного двигателя такой фокус выполнить так просто не получается, так как невозможно сделать несвязанные друг с другом фазы статора, которые бы управлялись отдельным преобразователем полностью независимо от других. Кроме того, ВИД очень хорошо регулируются «вверх» от основной частоты. Железку ротора можно раскручивать без проблем до очень высоких частот.
Мы на фирме ООО «НПФ ВЕКТОР» выполнили несколько проектов на базе этого двигателя. Например, делали небольшой привод для насосов горячего водоснабжения, а также недавно закончили разработку и отладку системы управления для мощных (1,6 МВт) многофазных резервируемых приводов для обогатительных фабрик АК «АЛРОСА». Вот машинка на 1,25 МВт:
Вся система управления, контроллеры и алгоритмы были сделаны у нас в ООО «НПФ ВЕКТОР», силовые преобразователи спроектировала и изготовила фирма ООО «НПП «ЦИКЛ+». Заказчиком работы и проектировщиком самих двигателей являлась фирма ООО «МИП «Мехатроника» ЮРГТУ (НПИ)».
Это совсем другой тип двигателя, отличающийся по принципу действия от обычного ВИД. Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
Исторически известны и широко используются вентильно-индукторные генераторы такого типа, применяемые на самолетах, кораблях, железнодорожном транспорте, а вот именно двигателями такого типа почему-то занимаются мало.
На рисунке схематично показана геометрия ротора и магнитный поток обмотки возбуждения, а также изображено взаимодействие магнитных потоков статора и ротора, при этом ротор на рисунке установлен в согласованное положение (момент равен нулю).
Ротор собран из двух пакетов (из двух половинок), между которыми установлена обмотка возбуждения (на рисунке показана как четыре витка медного провода). Несмотря на то, что обмотка висит «посередине» между половинками ротора, крепится она к статору и не вращается. Ротор и статор выполнены из шихтованного железа, постоянные магниты отсутствуют. Обмотка статора распределенная трехфазная – как у обычного асинхронного или синхронного двигателя. Хотя существуют варианты такого типа машин с сосредоточенной обмоткой: зубцами на статоре, как у SRD или BLDC двигателя. Витки обмотки статора охватывают сразу оба пакета ротора.
Витки обмотки статора охватывают сразу оба пакета ротора.
Упрощенно принцип работы можно описать следующим образом: ротор стремится повернуться в такое положение, при котором направления магнитного потока в статоре (от токов статора) и роторе (от тока возбуждения) совпадут. При этом половина электромагнитного момента образуется в одном пакете, а половина – в другом. Со стороны статора машина подразумевает разнополярное синусоидальное питание (ЭДС синусоидальна), электромагнитный момент активный (полярность зависит от знака тока) и образован за счет взаимодействия поля, созданного током обмотки возбуждения с полем, созданного обмотками статора. По принципу работы эта машина отлична от классических шаговых и SRD двигателей, в которых момент реактивный (когда металлическая болванка притягивается к электромагниту и знак усилия не зависит от знака тока электромагнита).
С точки зрения управления ВИД НВ оказывается эквивалентен синхронной машине с контактными кольцами. То есть, если вы не знаете конструкцию этой машины и используете её как «черный ящик», то она ведет себя практически неотличимо от синхронной машины с обмоткой возбуждения. Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Можно сделать векторное управление или автокоммутацию, можно ослаблять поток возбуждения для повышения частоты вращения, можно усиливать его для создания большего момента – всё так, как будто это классическая синхронная машина с регулируемым возбуждением. Только ВИД НВ не имеет скользящего контакта. И не имеет магнитов. И ротор в виде дешевой железной болванки. И момент не пульсирует, в отличие от SRD. Вот, например, синусоидальные токи ВИД НВ при работе векторного управления:
Кроме того, ВИД НВ можно создавать многофазным и многосекционным, аналогично тому, как это делается в ВИД СВ. При этом фазы оказываются несвязанными друг с другом магнитными потоками и могут работать независимо. Т.е. получается как будто бы несколько трехфазных машин в одной, к каждой из которых присоединяется свой независимый инвертор с векторным управлением, а результирующая мощность просто суммируется. Координации между преобразователями при этом не требуется никакой – только общее задание частоты вращения.
Минусы этого двигателя тоже есть: напрямую от сети он крутиться не может, так как, в отличие от классических синхронных машин, ВИД НВ не имеет асинхронной пусковой обмотки на роторе. Кроме того, он сложнее по конструкции, чем обычный ВИД СВ (SRD).
На основе данного двигателя мы также сделали несколько успешных проектов. Например, один из них – это серия приводов насосов и вентиляторов для районных теплостанций г. Москвы мощностью 315-1200кВт (ссылка на проект). Это низковольтные (380В) ВИД НВ с резервированием, где одна машина «разбита» на 2, 4 или 6 независимых трехфазных секций. На каждую секцию ставится свой однотипный преобразователь с векторным бездатчиковым управлением. Таким образом можно легко наращивать мощность на базе однотипной конструкции преобразователя и двигателя. При этом часть преобразователей подключено к одному вводу питания районной теплостанции, а часть к другому. Поэтому если происходит «моргушка питания» по одному из вводов питания, то привод не встает: половина секций кратковременно работают в перегрузке, пока питание не восстановится. Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
Как только оно восстанавливается, на ходу в работу автоматически вводятся отдыхавшие секции. Вообще, наверное, этот проект заслуживал бы отдельной статьи, поэтому пока про него закончу, вставив фото двигателя и преобразователей:
К сожалению, двумя словами здесь не обойтись. И общими выводами про то, что у каждого двигателя свои достоинства и недостатки – тоже. Потому что не рассмотрены самые главные качества – массогабаритные показатели каждого и типов машин, цена, а также их механические характеристики и перегрузочная способность. Оставим нерегулируемый асинхронный привод крутить свои насосы напрямую от сети, тут ему конкурентов нет. Оставим коллекторные машины крутить дрели и пылесосы, тут с ними в простоте регулирования тоже потягаться сложно.
Давайте рассмотрим регулируемый электропривод, режим работы которого – длительный. Коллекторные машины здесь сразу исключаются из конкуренции по причине ненадежности коллекторного узла. Но остались еще четыре – синхронный, асинхронный, и два типа вентильно-индукторных. Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Если мы говорим о приводе насоса, вентилятора и чего-то похожего, что используется в промышленности и где масса и габариты особо не важны, то здесь из конкуренции выпадают синхронные машины. Для обмотки возбуждения требуются контактные кольца, что является капризным элементом, а постоянные магниты очень дороги. Конкурирующими вариантами остаются асинхронный привод и вентильно-индукторные двигатели обоих типов.
Как показывает опыт, все три типа машин успешно применяются. Но – асинхронный привод невозможно (или очень сложно) секционировать, т.е. разбить мощную машину на несколько маломощных. Поэтому для обеспечения большой мощности асинхронного преобразователя требуется делать его высоковольтным: ведь мощность – это, если грубо, произведение напряжения на ток. Если для секционируемого привода мы можем взять низковольтный преобразователь и наставить их несколько, каждый на небольшой ток, то для асинхронного привода преобразователь должен быть один. Но не делать же преобразователь на 500В и ток 3 килоампера? Это провода нужны с руку толщиной. Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность.
Поэтому для увеличения мощности повышают напряжение и снижают ток. А высоковольтный преобразователь – это совсем другой класс задачи. Нельзя просто так взять силовые ключи на 10кВ и сделать из них классический инвертор на 6 ключей, как раньше: и нет таких ключей, а если есть, они очень дороги. Инвертор делают многоуровневым, на низковольтных ключах, соединенных последовательно в сложных комбинациях. Такой инвертор иногда тянет за собой специализированный трансформатор, оптические каналы управления ключами, сложную распределенную систему управления, работающую как одно целое… В общем, сложно всё у мощного асинхронного привода. При этом вентильно-индукторный привод за счет секционирования может «отсрочить» переход на высоковольтный инвертор, позволяя сделать привода до единиц мегаватт от низковольтного питания, выполненные по классической схеме. В этом плане ВИПы становятся интереснее асинхронного привода, да еще и обеспечивают резервирование. С другой стороны, асинхронные привода работают уже сотни лет, двигатели доказали свою надежность. ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
ВИПы же только пробивают себе дорогу. Так что здесь надо взвесить много факторов, чтобы выбрать для конкретной задачи наиболее оптимальный привод.
Но всё становится еще интереснее, когда речь заходит о транспорте или о малогабаритных устройствах. Там уже нельзя беспечно относиться к массе и габаритам электропривода. И вот там уже нужно смотреть на синхронные машины с постоянными магнитами. Если посмотреть только на параметр мощности деленной на массу (или размер), то синхронные машины с постоянными магнитами вне конкуренции. Отдельные экземпляры могут быть в разы меньше и легче, чем любой другой «безмагнитный» привод переменного тока. Но здесь есть одно опасное заблуждение, которое я сейчас постараюсь развеять.
Если синхронная машина в три раза меньше и легче – это не значит, что для электротяги она подходит лучше. Всё дело в отсутствии регулировки потока постоянных магнитов. Поток магнитов определяет ЭДС машины. На определенной частоте вращения ЭДС машины достигает напряжения питания инвертора и дальнейшее повышение частоты вращения становится затруднительно.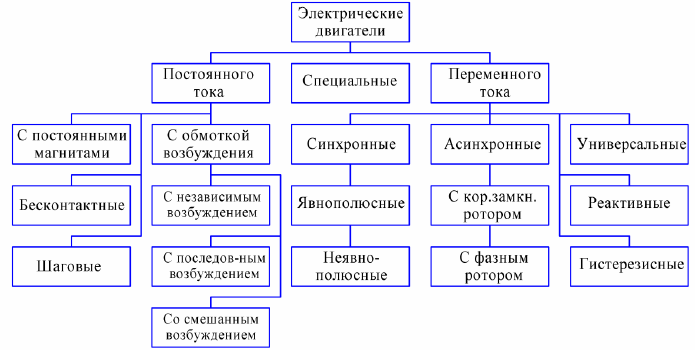 Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
Тоже самое касается и повышения момента. Если нужно реализовать больший момент, в синхронной машине нужно повышать ток статора – момент возрастет пропорционально. Но более эффективно было бы повысить и поток возбуждения – тогда и магнитное насыщение железа было бы более гармоничным, а потери были бы ниже. Но опять же поток магнитов повышать мы не можем. Более того, в некоторых конструкциях синхронных машин и ток статора нельзя повышать сверх определенной величины – магниты могут размагнититься. Что же получается? Синхронная машина хороша, но только лишь в одной единственной точке – в номинальной. С номинальной частотой вращения и номинальным моментом. Выше и ниже – всё плохо. Если это нарисовать, то получится вот такая характеристика частоты от момента (красным):
На рисунке по горизонтальной оси отложен момент двигателя, по вертикальной – частота вращения. Звездочкой отмечена точка номинального режима, например, пусть это будет 60кВт. Заштрихованный прямоугольник – это диапазон, где возможно регулирование синхронной машины без проблем – т. е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
е. «вниз» по моменту и «вниз» по частоте от номинала. Красной линией отмечено, что можно выжать из синхронной машины сверх номинала – небольшое повышение частоты вращения за счет так называемого ослабления поля (на самом деле это создание лишнего реактивного тока по оси d двигателя в векторном управлении), а также показана некоторая возможная форсировка по моменту, чтобы было безопасно для магнитов. Всё. А теперь давайте поставим эту машину в легковое транспортное средство без коробки передач, где батарея рассчитана на отдачу 60кВт. Желаемая тяговая характеристика изображена синим. Т.е. начиная с самой низкой скорости, скажем, с 10км/ч привод должен развивать свои 60кВт и продолжать их развивать вплоть до максимальной скорости, скажем 150км/ч. Синхронная машина и близко не лежала: её момента не хватит даже чтобы заехать на бордюр у подъезда (или на поребрик у парадной, для полит. корректности), а разогнаться машина сможет лишь до 50-60км/ч.
Что же это значит? Синхронная машина не подходит для электротяги без коробки передач? Подходит, конечно же, просто надо по-другому её выбрать.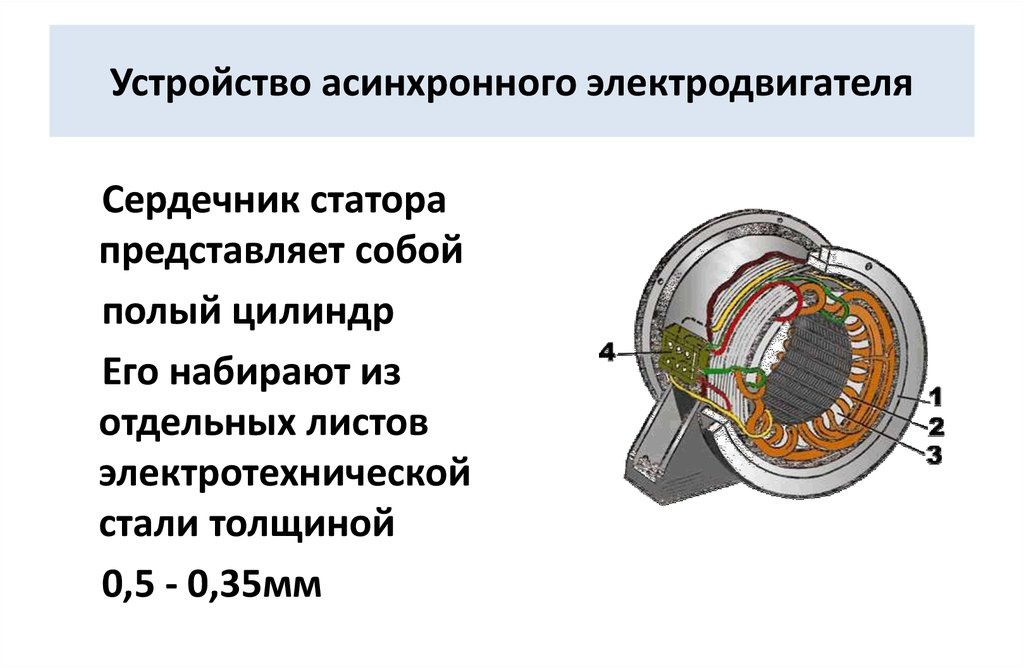 Вот так:
Вот так:
Надо выбрать такую синхронную машину, чтобы требуемый тяговый диапазон регулирования был весь внутри её механической характеристики. Т.е. чтобы машина одновременно могла развить и большой момент, и работать на большой частоте вращения. Как вы видите из рисунка… установленная мощность такой машины будет уже не 60кВт, а 540кВт (можно посчитать по делениям). Т.е. в электромобиль с батареей на 60кВт придется установить синхронную машину и инвертор на 540кВт, просто чтобы «пройти» по требуемому моменту и частоте вращения.
Конечно же, так как описано, никто не делает. Никто не ставит машину на 540кВт вместо 60кВт. Синхронную машину модернизируют, пытаясь «размазать» её механическую характеристику из оптимума в одной точке вверх по скорости и вниз по моменту. Например, прячут магниты в железо ротора (делают инкорпорированными), это позволяет не бояться размагнитить магниты и ослаблять поле смелее, а также перегружать по току побольше. Но от таких модификаций синхронная машина набирает вес, габариты и становится уже не такой легкой и красивой, какой она была раньше. Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Появляются новые проблемы, такие как «что делать, если в режиме ослабления поля инвертор отключился». ЭДС машины может «накачать» звено постоянного тока инвертора и выжечь всё. Или что делать, если инвертор на ходу пробился — синхронная машина замкнется и может токами короткого замыкания убить и себя, и водителя, и всю оставшуюся живой электронику — нужны схемы защиты и т.п.
Поэтому синхронная машина хороша там, где большого диапазона регулирования не требуется. Например, в сегвее, где скорость с точки зрения безопасности может быть ограничена на 30км/ч (или сколько там у него?). А еще синхронная машина идеальна для вентиляторов: у вентилятора сравнительно мало изменяется частота вращения, от силы раза в два – больше особо нет смысла, так как воздушный поток ослабевает пропорционально квадрату скорости (примерно). Поэтому для небольших пропеллеров и вентиляторов синхронная машина – это то, что нужно. И как раз она туда, собственно, успешно ставится.
Тяговую кривую, изображенную на рисунке синим цветом, испокон веков реализуют двигатели постоянного тока с регулируемым возбуждением: когда ток обмотки возбуждения изменяют в зависимости от тока статора и частоты вращения. При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
При увеличении частоты вращения уменьшается и ток возбуждения, позволяя машине разгоняться выше и выше. Поэтому ДПТ с независимым (или смешанным) управлением возбуждением классически стоял и до сих пор стоит в большинстве тяговых применений (метро, трамваи и т.п.). Какая же электрическая машина переменного тока может с ним поспорить?
К такой характеристике (постоянства мощности) могут лучше приблизиться двигатели, у которых регулируется возбуждение. Это асинхронный двигатель и оба типа ВИПов. Но у асинхронного двигателя есть две проблемы: во-первых, его естественная механическая характеристика – это не кривая постоянства мощности. Потому что возбуждение асинхронного двигателя осуществляется через статор. А поэтому в зоне ослабления поля при постоянстве напряжения (когда на инверторе оно закончилось) подъем частоты в два раза приводит к падению тока возбуждения в два раза и моментоообразующего тока тоже в два раза. А так как момент на двигателе – это произведение тока на поток, то момент падает в 4 раза, а мощность, соответственно, в два. Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Вторая проблема – это потери в роторе при перегрузке с большим моментом. В асинхронном двигателе половина потерь выделяется в роторе, половина в статоре. Для уменьшения массогабаритных показателей на транспорте часто применяется жидкостное охлаждение. Но водяная рубашка эффективно охладит лишь статор, за счет явления теплопроводности. От вращающегося ротора тепло отвести значительно сложнее – путь отвода тепла через «теплопроводность» отрезан, ротор не касается статора (подшипники не в счет). Остается воздушное охлаждение путем перемешивая воздуха внутри пространства двигателя или излучение тепла ротором. Поэтому ротор асинхронного двигателя получается своеобразным «термосом» — единожды перегрузив его (сделав динамичный разгон на машине), требуется долгое время ждать остывания ротора. А ведь его температуру еще и не измерить… приходится только предсказывать по модели.
Здесь нужно отметить, как мастерски обе проблемы асинхронного двигателя обошли в Тесла в своей Model S. Проблему с отводом тепла из ротора они решили… заведя во вращающийся ротор жидкость (у них есть соответствующий патент, где вал ротора полый и он омывается внутри жидкостью, но достоверно я не знаю, применяют ли они это).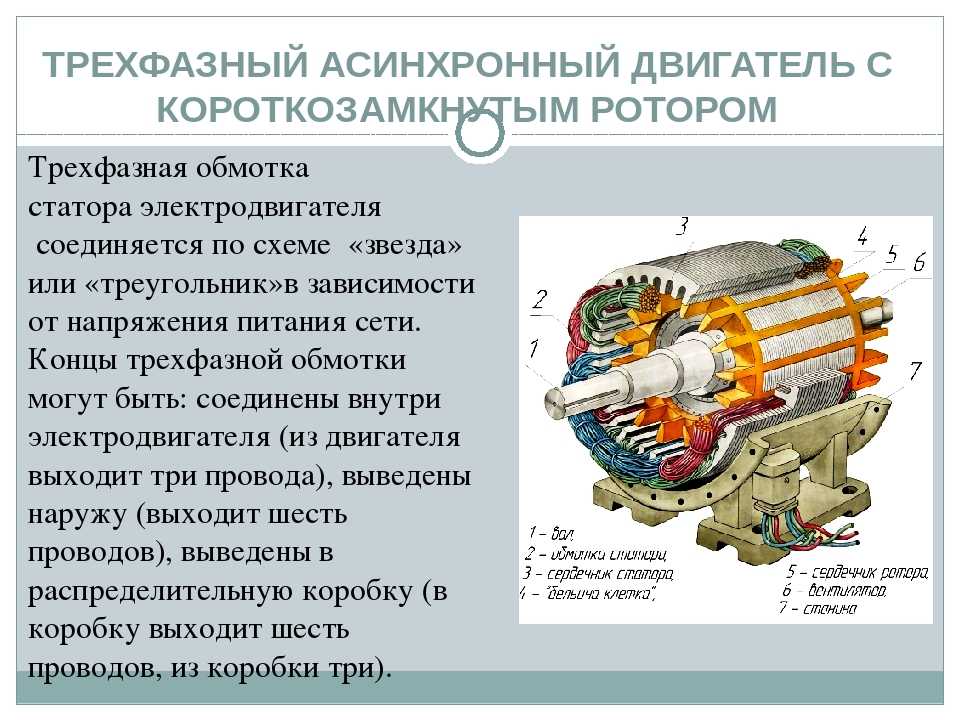 А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А вторую проблему с резким уменьшением момента при ослаблении поля… они не решали. Они поставили двигатель с тяговой характеристикой, почти как у меня нарисована для «избыточного» синхронного двигателя на рисунке выше, только у них не 540кВт, а 300кВт. Зона ослабления поля в тесле очень маленькая, где-то два крата. Т.е. они поставили «избыточный» для легкового автомобиля двигатель, сделав вместо бюджетного седана по сути спорт-кар с огромной мощностью. Недостаток асинхронного двигателя обратили в достоинство. Но если бы они попытались сделать менее «производительный» седан, мощностью 100кВт или меньше, то асинхронный двигатель, скорее всего, был бы точно таким же (на 300кВт), просто его искусственно задушили электроникой бы под возможности батареи.
А теперь ВИПы. Что могут они? Какая тяговая характеристика у них? Про ВИД СВ я точно сказать не могу – это по своему принципу работы нелинейный двигатель, и от проекта к проекту его механическая характеристика может сильно меняться. Но в целом он скорее всего лучше асинхронного двигателя в плане приближения к желаемой тяговой характеристике с постоянством мощности. А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
А вот про ВИД НВ я могу сказать подробнее, так как мы на фирме им очень плотно занимаемся. Видите вон ту желаемую тяговую характеристику на рисунке выше, которая нарисована синим цветом, к которой мы хотим стремиться? Это на самом деле не просто желаемая характеристика. Это реальная тяговая характеристика, которую мы по точкам по датчику момента сняли для одного из ВИД НВ. Так как ВИД НВ имеет независимое внешнее возбуждение, то его качества наиболее приближены к ДПТ НВ, который тоже может сформировать такую тяговую характеристику за счет регулирования возбуждения.
Так что же? ВИД НВ – идеальная машина для тяги без единой проблемы? На самом деле нет. Проблем у него тоже куча. Например, его обмотка возбуждения, которая «висит» между пакетами статора. Хоть она и не вращается, от неё тоже сложно отводить тепло – получается ситуация почти как ротором асинхронника, лишь немного получше. Можно, в случае надобности, «кинуть» трубку охлаждения со статора. Вторая проблема – это завышенные массогабаритные показатели. Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
Глядя на рисунок ротора ВИД НВ, можно видеть, что пространство внутри двигателя используется не очень эффективно – «работают» только начало и конец ротора, а середина занята обмоткой возбуждения. В асинхронном двигателе, например, вся длина ротора, всё железо «работает». Сложность сборки – засунуть обмотку возбуждения внутрь пакетов ротора надо еще суметь (ротор делается разборным, соответственно, есть проблемы с балансировкой). Ну и просто массогабаритные характеристики пока получаются не очень-то выдающимися по сравнению с теми же асинхронными двигателями Тесла, если накладывать тяговые характеристики друг на друга.
А также есть еще общая проблема обоих типов ВИД. Их ротор – пароходное колесо. И на высоких частотах вращения (а высокая частота нужна, так высокочастотные машины при той же мощности меньше тихоходных) потери от перемешивания воздуха внутри становятся очень значительными. Если до 5000-7000 об/мин ВИД еще можно сделать, то на 20000 об/мин это получится большой миксер.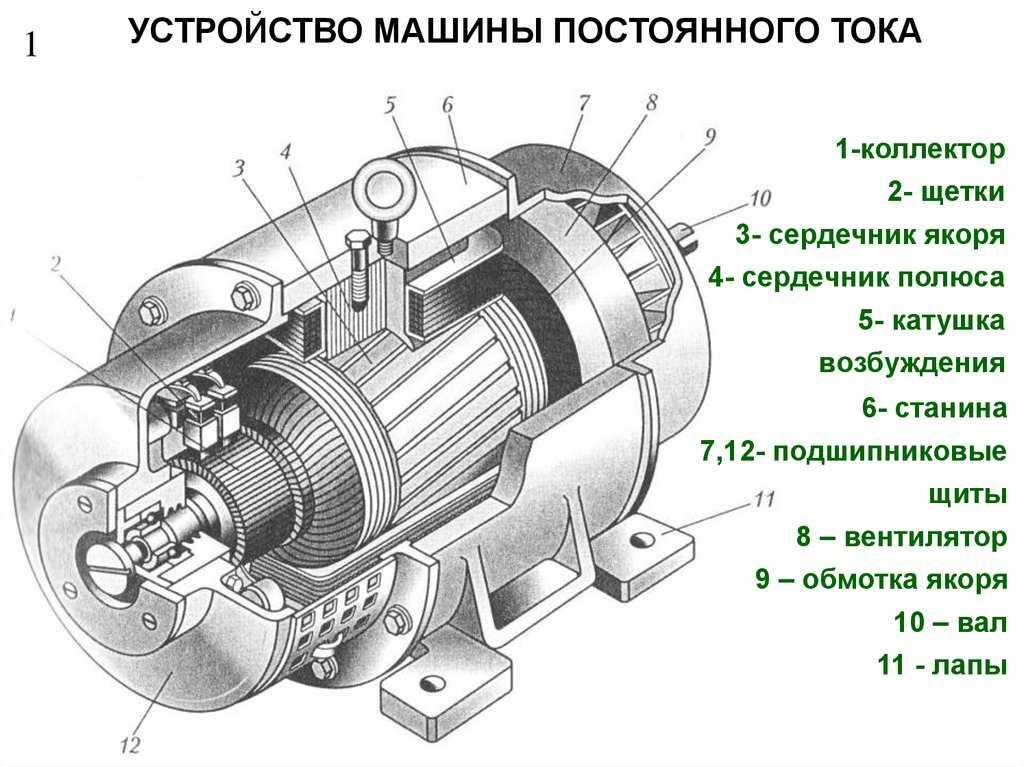 А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
А вот асинхронный двигатель на такие частоты и гораздо выше сделать вполне можно за счет гладкого статора.
Так что же лучше всего в итоге для электротяги? Какой двигатель самый лучший?
Понятия не имею. Все плохие. Надо изобретать дальше. Но мораль статьи такова – если вы хотите сравнить между собой разные типы регулируемого электропривода, то нужно сравнивать на конкретной задаче с конкретной требуемой механической характеристикой по всем-всем параметрам, а не просто по мощности. Также в этой статье не рассмотрены еще куча нюансов сравнения. Например, такой параметр как длительность работы в каждой из точек механической характеристики. На максимальном моменте обычно ни одна машина не может работать долго – это режим перегрузки, а на максимальной скорости очень плохо себя чувствуют синхронные машины с магнитами – там у них огромные потери в стали. А еще интересный параметр для электротяги – потери при движении выбегом, когда водитель отпустил газ. Если ВИПы и асинхронные двигатели будут крутиться как болванки, то у синхронной машины с постоянными магнитами останутся почти номинальные потери в стали из-за магнитов. И так далее, и так далее…
И так далее, и так далее…
Поэтому нельзя вот так просто взять и выбрать лучший электропривод.
UPD:
Обобщая замечания в комментариях, необходимо дополнить некоторые важные, как оказалось, вещи, которые я изначально опустил как маловажные.
1. Асинхронные двигатели до эры преобразователей частоты регулировали за счет применения так называемого фазного ротора — когда ротор делался в виде обмотки, а не беличьей клетки, а через контактные кольца (как у синхронной машины) фазы ротора выводились наружу. Включая в цепь ротора резисторы можно было мягко пускать АД и безопасно регулировать частоту вращения, изменяя сопротивление. Проблема в том, что очень много энергии при этом терялось в резисторах — иногда до половины от подводимой к приводу мощности.
2. В статье не упомянуты синхронные реактивные машины и их совмещение с синхронными машинами с постоянными магнитами. Если сделать ротор синхронной машины с магнитами явнополюсным — например таким, как нарисован ротор SRD двигателя на gif анимации, то развиваемый момент может быть не только активным, но и реактивным — как у SRD. Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
Подбирая оптимальное сочетание активного и реактивного момента можно частично исключить проблемы классической синхронной машины с магнитами, значительно расширив диапазон работы с постоянством мощности. Получается некий гибрид реактивной машины и синхронной с магнитами.
3. Шаговые двигатели не рассмотрены, потому что по принципу действия они в первом приближении схожи либо с синхронными машинами с постоянными магнитами, либо с SRD двигателями — зависит от конкретного типа шаговика. Только шаговые двигатели, в отличие от «силовых» приводов, имеют гораздо большее количество пар полюсов (зубцов) для увеличения коэффициента электрической редукции: чтобы одному периоду тока соответствовало меньшее угловое перемещение вала. Управление шаговиками обычно тривиальное — последовательный перебор фаз друг за другом (шаги). Более продвинутые системы дробят шаг, подавая в двигатель «микрошаги» — по сути приближая управление к синусоидальному. Еще более продвинутые используют датчик положения ротора и применяют полноценное векторное управление. Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
Но в таком случае и машину нужно делать более качественную, а называться в сумме это будет уже настоящим сервоприводом.
17 Различные типы электродвигателей
Машина, преобразующая электрическую энергию в механическую, называется электродвигателем. Взаимодействие магнитного поля и электрического тока в обмотке катушки в большинстве случаев приводит в движение двигатели. В результате этого он создает силу в виде крутящего момента, передаваемого на вал двигателя.
Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей. Расположение проводников и поля в некоторых типах электродвигателей различаются. Он также регулирует механический выходной крутящий момент, скорость и положение, которые можно использовать.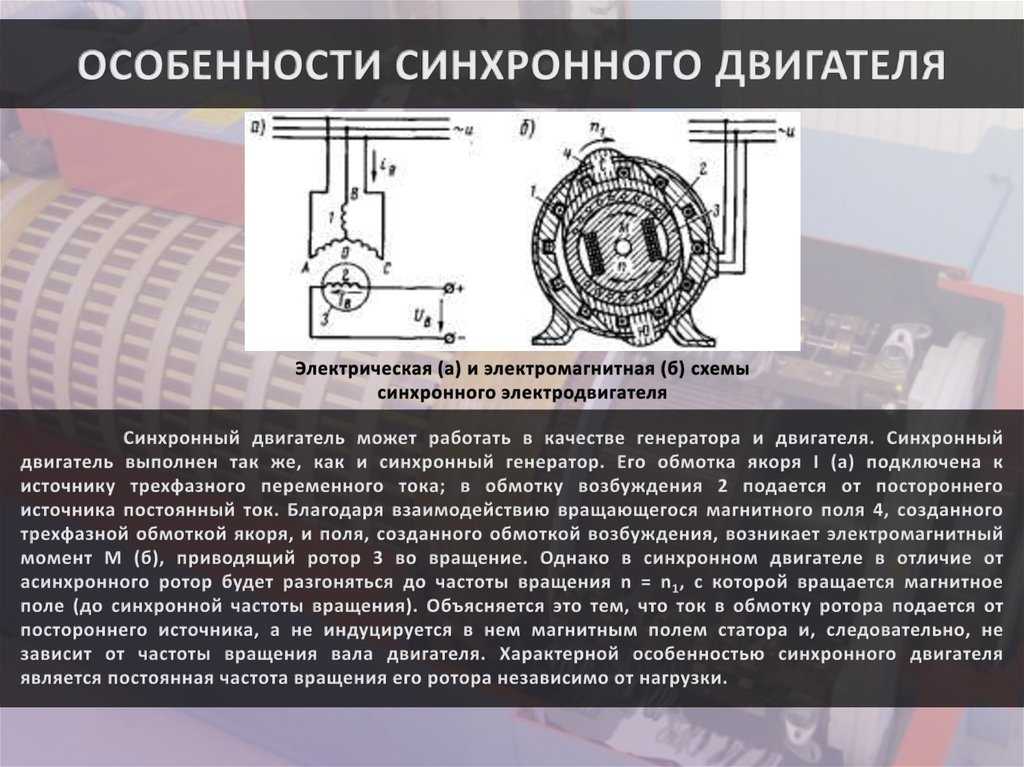
Современные электродвигатели могут обеспечить надежную механическую энергию для промышленных применений. Вентиляторы, воздуходувки и насосы, а также станки, транспортные средства и дисковые приводы — все это примеры промышленного применения. В электрических часах используются небольшие двигатели. В этой статье вы узнаете о 16 распространенных типах электродвигателей и их функциях.
Дополнительная информация: Серводвигатель
Содержание
- 1 Типы электродвигателей
- 1.1 AC Motor
- 1.2 Induction motor
- 1.3 1-phase induction motor
- 1.4 3-phase induction motor
- 1.5 Series motor
- 1.6 Join our Newsletter
- 1.7 Compound motor
- 1.8 PDMC motor
- 1.9 Синхронный двигатель
- 1.10 Шаговый двигатель
- 1.11 Бесщеточный двигатель
- 1.12 Универсальный двигатель
- 1.13 Гистерезисный двигатель
- 1.14 Реактивный двигатель
- 1.
 95 Линейный двигатель0022
95 Линейный двигатель0022 - 1.16 Двигатель постоянного тока
- 1.17 Шунтирующий двигатель
- 1.18 Двигатель с независимым возбуждением
- 2 Заключение
- 2.1 Пожалуйста, поделитесь!
Типы электродвигателей
Ниже приведены распространенные типы электродвигателей:
- Двигатель постоянного тока
- Шунтирующий двигатель
- Двигатель с независимым возбуждением Двигатель серии
- Составной двигатель
- Двигатель PDMC
- Двигатель переменного тока
- Асинхронный двигатель
- 1-фазный асинхронный двигатель
- 3-фазный асинхронный двигатель
- Синхронный двигатель
- Шаговый двигатель
- Бесщеточный двигатель
- Универсальный двигатель
- Гистерезис двигателя
- Сопротивление двигателя
- Линейный двигатель
Двигатель переменного тока
Двигатель переменного тока (AC) представляет собой тип электродвигателя, который преобразует переменный ток в механическую энергию посредством явления электромагнитной индукции. Он состоит из двух основных частей: внешнего статора, который генерирует магнитное поле с помощью переменного тока, и внутреннего ротора, который генерирует второе магнитное поле с помощью выходного вала.
Он состоит из двух основных частей: внешнего статора, который генерирует магнитное поле с помощью переменного тока, и внутреннего ротора, который генерирует второе магнитное поле с помощью выходного вала.
Постоянные магниты, реактивная энергия и электрические обмотки постоянного или переменного тока могут использоваться для создания магнитных полей ротора. В промышленности трехфазные двигатели переменного тока обычно используются для преобразования большой мощности из электрической энергии в механическую работу. Двигатель требует меньше энергии для запуска и является более прочным и долговечным.
Асинхронный двигатель
Для создания крутящего момента этому двигателю необходим электрический ток, который получается за счет электромагнитной индукции от вращающегося магнитного поля обмотки статора. В результате можно построить асинхронный двигатель без электрического соединения с ротором.
Асинхронные двигатели широко используются в промышленности, торговле и домашнем хозяйстве. Поскольку они работают на более низкой скорости, чем синхронные двигатели, эти двигатели иногда называют «асинхронными двигателями». Они имеют простую, прочную конструкцию, недорогую и не требуют особого ухода.
Поскольку они работают на более низкой скорости, чем синхронные двигатели, эти двигатели иногда называют «асинхронными двигателями». Они имеют простую, прочную конструкцию, недорогую и не требуют особого ухода.
Однофазный асинхронный двигатель
Однофазный источник питания используется для питания однофазного двигателя переменного тока, как следует из названия. На статоре используется однофазная обмотка, а на роторе — короткозамкнутая обмотка. Импульсное магнитное поле создается при подаче однофазного питания на обмотку статора. Из-за инерции в пульсирующем поле ротор не вращается.
Подробнее: Знакомство со стартером двигателя
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель преобразует трехфазную входную электрическую мощность в выходную механическую энергию с использованием электромеханической энергии. Эти двигатели используются в различных промышленных приложениях и предназначены для работы от трехфазных источников питания переменного тока. Дробилки, плунжерные насосы, краны, подъемники, компрессоры и конвейеры — вот лишь некоторые из областей применения.
Дробилки, плунжерные насосы, краны, подъемники, компрессоры и конвейеры — вот лишь некоторые из областей применения.
Серийный двигатель
Серийный двигатель представляет собой набор отдельных двигателей, в которых возбуждение соединено последовательно с обмоткой якоря, что позволяет протекать через нее большому току. Серийный двигатель выполняет ту же функцию, что и другие двигатели, в том смысле, что он преобразует электрическую энергию в механическую.
Присоединяйтесь к нашей рассылке новостей
Этот вид арматуры имеет клемму питания на одном конце и катушку возбуждения на другом. Когда внешнее магнитное поле почти сформировано, с ним взаимодействует проводник с током, и может производиться вращательное движение. Для электроприводов с постоянной и переменной скоростью они подходят как для приводов высокой, так и малой мощности.
Составной двигатель
Обмотка якоря составных электродвигателей соединена как с последовательными, так и с шунтирующими катушками возбуждения. Он несет достаточный магнитный поток в якоре, чтобы обеспечить достаточный крутящий момент, чтобы помочь вращаться с желаемой скоростью.
Он несет достаточный магнитный поток в якоре, чтобы обеспечить достаточный крутящий момент, чтобы помочь вращаться с желаемой скоростью.
Этот мотор был создан для улучшения качеств обоих моторов. Шунтовой двигатель имеет очень эффективное регулирование скорости, тогда как последовательный двигатель имеет очень высокий начальный крутящий момент. Однако пусковой момент ниже, чем у последовательного двигателя, а регулирование скорости менее эффективно, чем у параллельного двигателя.
Подробнее: Понимание диэлектрической проницаемости конденсатора
Двигатель PDMC
Полюса постоянного магнита используются в этих типах двигателей, как следует из названия. В этом двигателе магниты намагничены радиально и размещены на внутренних стенках цилиндрического стального статора. Поскольку в этом двигателе нет катушки возбуждения, крутящий момент создается взаимодействием потока якоря и постоянного потока.
Сердечник якоря, коммутатор и обмотка якоря составляют двигатель PDMC. Рабочее напряжение двигателя постоянного тока с постоянным током составляет 6 вольт, при этом 12 вольт доступны, если питание 24 вольта постоянного тока подается от источников напряжения, таких как батареи или выпрямители. Двигатели PMDC обычно используются в приложениях, требующих крошечных двигателей постоянного тока.
Рабочее напряжение двигателя постоянного тока с постоянным током составляет 6 вольт, при этом 12 вольт доступны, если питание 24 вольта постоянного тока подается от источников напряжения, таких как батареи или выпрямители. Двигатели PMDC обычно используются в приложениях, требующих крошечных двигателей постоянного тока.
Синхронный двигатель
Он определяется как двигатель переменного тока, в котором вращение ротора синхронизировано с частотой сети. В этом случае все обороты ротора равны целому числу, кратному частоте приложенного тока.
Для работы этого двигателя не требуется индукционный ток. В отличие от асинхронных двигателей, этот многофазный двигатель переменного тока оснащен электромагнитами на статоре, которые создают вращающееся магнитное поле. Эти двигатели часто используются в приложениях, требующих точного и постоянного действия.
Шаговый двигатель
Это тип электродвигателя, который разделяет полный оборот на множество равных шагов. До тех пор, пока двигатель соответствующим образом масштабируется для приложения с точки зрения крутящего момента и скорости, положением двигателя можно управлять, работая и удерживая любую из этих ступеней без какого-либо датчика положения для обратной связи.
До тех пор, пока двигатель соответствующим образом масштабируется для приложения с точки зрения крутящего момента и скорости, положением двигателя можно управлять, работая и удерживая любую из этих ступеней без какого-либо датчика положения для обратной связи.
Ротор и статор являются двумя наиболее важными компонентами. Ротор представляет собой вращающийся вал двигателя, а статор содержит неподвижные части двигателя, которые представляют собой электромагниты. Без необходимости активировать двигатель, эти двигатели могут обеспечить гибкость и постоянный удерживающий момент. Среди прочего, они используются в 3D-принтерах, текстильных машинах и печатных машинах.
Бесщеточный двигатель
Бесщеточный электродвигатель постоянного тока, работающий от источника постоянного тока. Двигатель оснащен электронным контроллером, который изменяет постоянные токи в обмотках двигателя, в результате чего магнитные поля вращаются в пространстве и следуют за ротором с постоянными магнитами.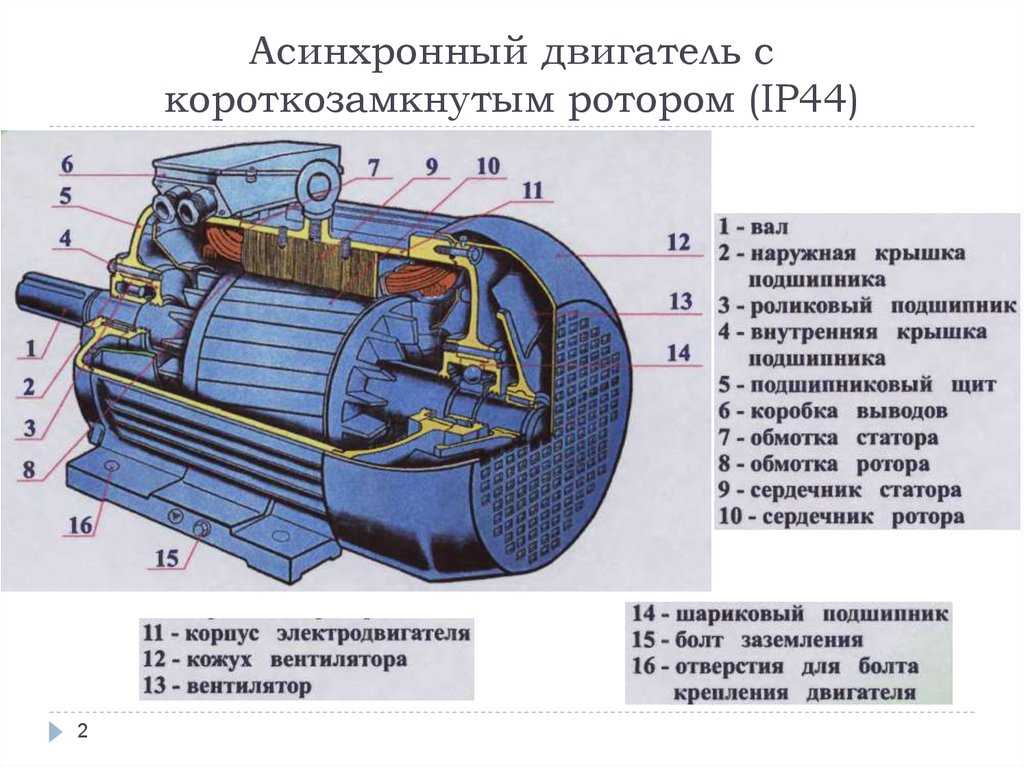
Контроллер также управляет скоростью и крутящим моментом двигателя, регулируя фазу и амплитуду импульсов постоянного тока. Электродвигатели такого типа чрезвычайно эффективны, обеспечивая огромный крутящий момент в широком диапазоне скоростей. Бесщеточные двигатели используются в различных устройствах, включая жесткие диски, CD/DVD-плееры, насосы и т. д.
Подробнее: Обычные типы изоляторов, используемых в линиях электропередачи электромагнит в качестве статора. Переменная скорость, высокий крутящий момент трансмиссии и высокий начальный крутящий момент — все это атрибуты этого двигателя. Универсальные двигатели широко распространены в пылесосах, швейных машинах и других бытовых приборах.
Универсальный двигатель построен аналогично двигателю постоянного тока, но с некоторыми модификациями, позволяющими ему работать от сети переменного тока. Электродвигатели такого типа рассчитаны на вращение с высокой скоростью более 3500 об/мин. Поскольку катушка возбуждения и якорь будут иметь обратную полярность с источником тока, этот двигатель будет эффективно работать от источника переменного тока.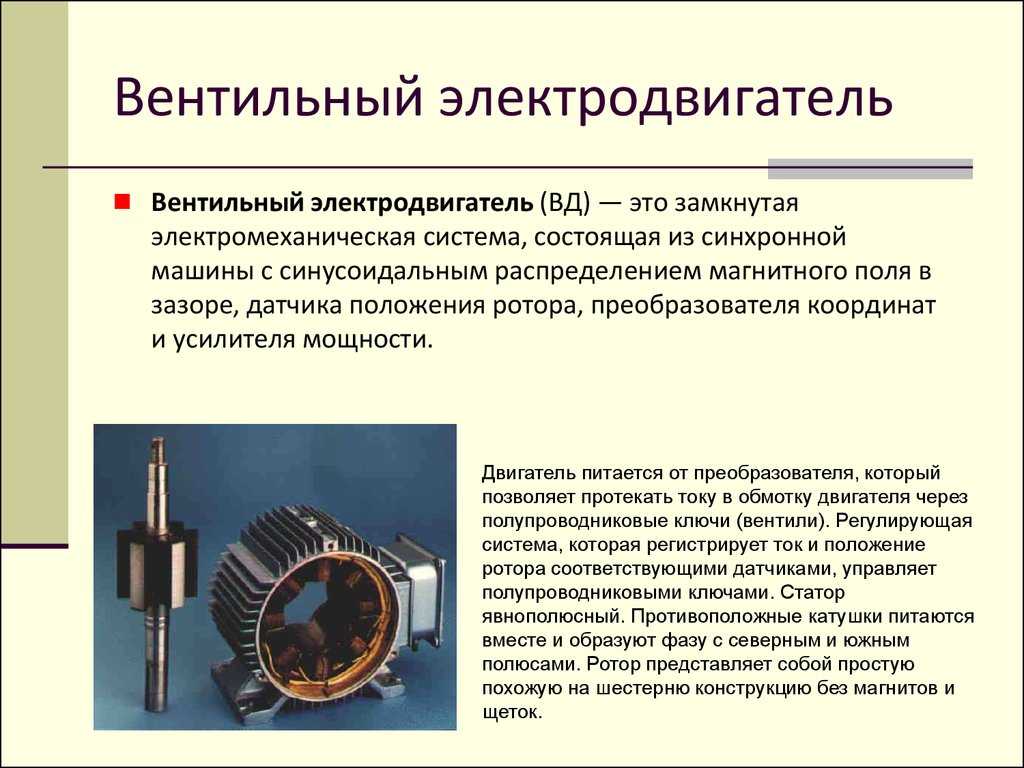
Гистерезисный двигатель
Это асинхронный двигатель с цилиндрическим ротором, который работает за счет индуцированных гистерезисных потерь в стальном роторе с высоким удерживанием. Он может работать в одной из трех фаз и бесшумен для окружающей среды, а также поддерживает постоянный темп.
Кроме того, эти типы электродвигателей долговечны и надежны в полевых условиях и могут работать на различных скоростях. Гистерезис и вихревые токи, которые индуцируются обмоткой статора, ответственны за крутящий момент, создаваемый в двигателе. В электрических часах, магнитофонах, проигрывателях и других устройствах звукозаписи и производства используются двигатели с гистерезисом.
Реактивный двигатель m
Реактивные двигатели с ферромагнитным ротором без обмоток имеют непостоянные магнитные полюса. Эти типы двигателей обеспечивают большую мощность по разумной цене, что делает их привлекательными для различных применений.
Когда магнитное вещество помещается в магнитное поле, оно всегда движется вверх с малым сопротивлением в соответствии с принципом работы этого двигателя. Основной недостаток заключается в том, что при работе на малых оборотах у него возникают значительные пульсации крутящего момента, что создает шум. Многие области применения включают таймеры, сигнальные устройства, записывающее оборудование и т. д.
Основной недостаток заключается в том, что при работе на малых оборотах у него возникают значительные пульсации крутящего момента, что создает шум. Многие области применения включают таймеры, сигнальные устройства, записывающее оборудование и т. д.
Линейный двигатель
Линейные двигатели имеют прямой ротор и статор, таким образом, вместо создания крутящего момента за счет вращения, он создает линейную силу по всей своей длине. С другой стороны, эти электродвигатели не всегда прямые.
Активный компонент линейного двигателя, например, подключен, тогда как более типичные двигатели имеют непрерывный контур. Существует два типа линейных двигателей: линейные двигатели с низким ускорением и линейные двигатели с высоким ускорением. Эти двигатели можно использовать для приведения в действие ленточных конвейеров, челноков текстильных ткацких станков и другого оборудования линейного перемещения.
Подробнее: Электрическая система автомобиля
Двигатель постоянного тока
Электродвигатели постоянного тока представляют собой электродвигатели вращательного типа, преобразующие электрическую энергию в механическую. Это указывает на то, что входная электрическая энергия представляет собой постоянный ток, который затем преобразуется в механическое вращение. Магнитное поле создает силы, которые используются в наиболее распространенных типах двигателей постоянного тока.
Это указывает на то, что входная электрическая энергия представляет собой постоянный ток, который затем преобразуется в механическое вращение. Магнитное поле создает силы, которые используются в наиболее распространенных типах двигателей постоянного тока.
Проводник с током получает крутящий момент и развивает направление движения при создании магнитного поля. Почти каждый двигатель постоянного тока имеет внутреннее устройство, электромеханическое или электронное, которое регулярно переключает направление тока в двигателе. В игрушках, электромобилях, кранах, подъемниках и сталепрокатных станах используются эти двигатели самых разных размеров.
Шунтовой двигатель
Это тип двигателя постоянного тока, в котором обмотка возбуждения и обмотка якоря соединены параллельно. В результате две обмотки двигателя подвергаются воздействию одного и того же источника напряжения, и он поддерживает индуктивную скорость при любой нагрузке.
При включении двигателя постоянного тока ток проходит как через статор, так и через ротор. Это приводит к созданию двух полей: полюса и арматуры. Шунтовые двигатели известны своим низким пусковым моментом и стабильной скоростью работы. Центробежные насосы, элеваторы, токарные станки, конвейеры и прядильные машины используют этот тип двигателя.
Это приводит к созданию двух полей: полюса и арматуры. Шунтовые двигатели известны своим низким пусковым моментом и стабильной скоростью работы. Центробежные насосы, элеваторы, токарные станки, конвейеры и прядильные машины используют этот тип двигателя.
Двигатель с независимым возбуждением
В этих типах электродвигателей основное питание подается независимо на якорь и обмотку возбуждения, как следует из названия. Поскольку обмотка возбуждения питается от отдельного источника постоянного тока, ток от якоря через нее не проходит.
Двигатели постоянного тока с независимым возбуждением идеально подходят для приложений, требующих широкого диапазона изменений скорости. Сталепрокатные заводы, бумагоделательные машины, судовые двигатели и другие устройства используют электродвигатели этого типа.
Подробнее: Понимание ядерной энергии
Заключение
Комбинируя магнетизм и электрический ток, электродвигатель генерирует механическую энергию, используя постоянный или переменный ток. Из-за условий эксплуатации и размера двигателя это чрезвычайно эффективные устройства. Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей.
Из-за условий эксплуатации и размера двигателя это чрезвычайно эффективные устройства. Источники постоянного тока, такие как батареи или выпрямители, и/или источники переменного тока, такие как электрические сети, инверторы или электрические генераторы, используются для питания электродвигателей. Тип источника питания, конструкция, применение и тип выходной скорости — все это факторы, которые можно использовать для классификации двигателей.
Это все, что касается этой статьи, в которой обсуждаются различные типы электродвигателей. Надеюсь, вы многому научитесь из прочитанного, если да, поделитесь с другими учениками. Спасибо за чтение, увидимся!
Типы двигателей. Классификация двигателей переменного и постоянного тока и специальных двигателей
Электрический двигатель представляет собой машину, преобразующую электрическую энергию в механическую. Он используется для создания крутящего момента для подъема грузов, перемещения объектов и выполнения различных других механических работ. В следующей статье мы обсудим различные типы электродвигателей, такие как двигатели переменного и постоянного тока, а также специальные типы двигателей и т. д.
В следующей статье мы обсудим различные типы электродвигателей, такие как двигатели переменного и постоянного тока, а также специальные типы двигателей и т. д.
Электродвигатели в основном делятся на три типа.
- Двигатели переменного тока
- Двигатели постоянного тока
- Специальные двигатели
Содержание
Электродвигатель переменного тока
Электродвигатель переменного тока преобразует электрическую энергию переменного тока (переменного тока) в механическую энергию. Эти электродвигатели питаются от однофазного или трехфазного переменного тока. Основным принципом работы двигателя переменного тока является вращающееся магнитное поле (ВМП), создаваемое обмоткой статора при пропускании через нее переменного тока. Ротор (имеющий собственное магнитное поле) следует за RMF и начинает вращение.
Двигатели переменного тока подразделяются на два типа.
- Синхронный двигатель
- Асинхронный или асинхронный двигатель
Синхронный двигатель
Как следует из названия, такой двигатель переменного тока имеет постоянную скорость, называемую синхронной скоростью, которая зависит только от частоты питающего тока.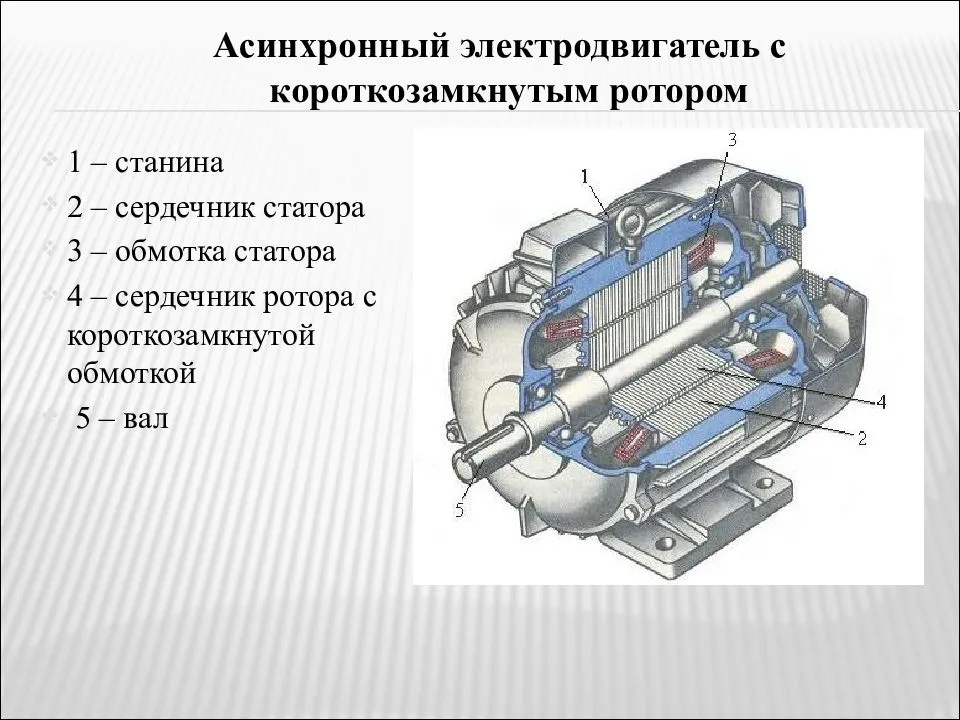 Скорость таких электродвигателей меняется только при изменении частоты питания и остается постоянной при изменении нагрузки. Он используется для применения с постоянной скоростью и контроля точности.
Скорость таких электродвигателей меняется только при изменении частоты питания и остается постоянной при изменении нагрузки. Он используется для применения с постоянной скоростью и контроля точности.
Синхронный двигатель имеет ту же конструкцию статора, что и асинхронный двигатель, и создает вращающееся магнитное поле при подаче входного переменного тока. В то время как конструкция ротора может варьироваться, например, он использует отдельное возбуждение постоянного тока для создания собственного магнитного поля.
- Связанный пост: Разница между синхронным и асинхронным двигателем
Синхронный двигатель с возбуждением
Для такого синхронного двигателя требуется возбуждение постоянным током. Возбуждение постоянным током означает, что ротор имеет отдельный источник постоянного тока для создания собственного магнитного потока. Этот поток реагирует с вращающимся потоком статора, создавая вращение.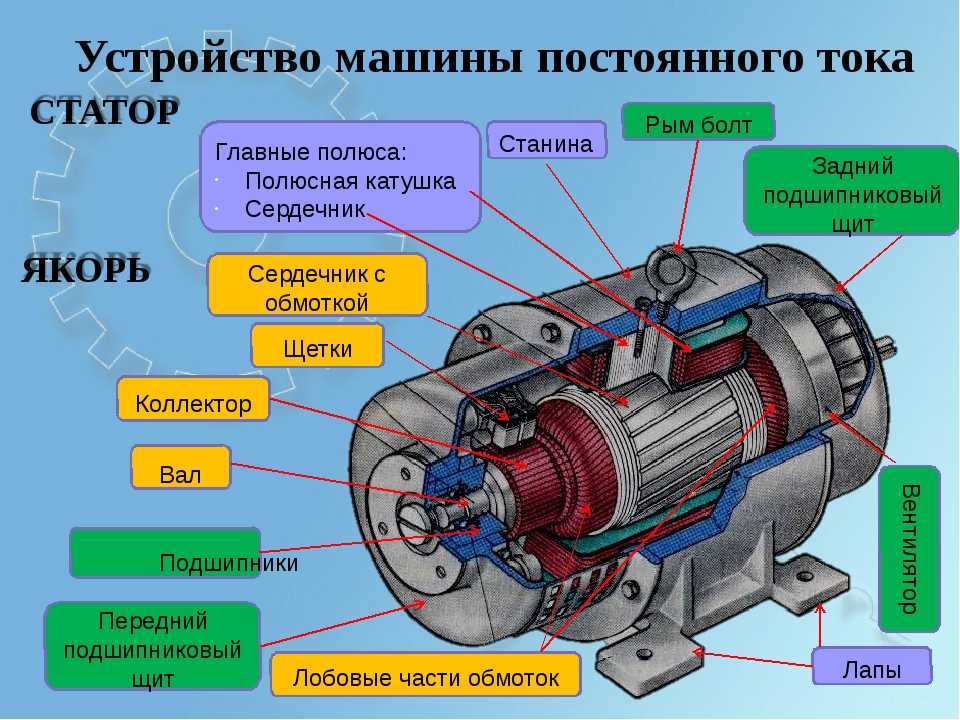 В роторе с проволочной обмоткой используется сборка коммутатора и щеток для подачи тока на обмотки ротора.
В роторе с проволочной обмоткой используется сборка коммутатора и щеток для подачи тока на обмотки ротора.
Однофазный синхронный двигатель
Такой синхронный двигатель работает от однофазного переменного тока. Если быть точным, на самом деле он использует две фазы, причем вторая фаза является производной от первой фазы. Причина использования двух фаз заключается в том, что одна фаза не может генерировать вращающееся магнитное поле. Такой двигатель может запускаться в любом направлении, т. е. его направление не определено, поэтому для задания направления используется дополнительное пусковое устройство.
Скорость такого двигателя зависит только от частоты сети. Они используются в записывающих инструментах, настенных электрических часах.
Трехфазный синхронный двигатель
Эти синхронные двигатели работают от трехфазного источника питания. Преимущество трехфазного переменного тока заключается в том, что он создает вращающееся магнитное поле в статоре, а расположение фаз определяет направление вращения. Эти двигатели не нуждаются в каком-либо специальном пусковом механизме, чтобы определить его направление. Однако для возбуждения ротору по-прежнему требуется дополнительный источник постоянного тока.
Эти двигатели не нуждаются в каком-либо специальном пусковом механизме, чтобы определить его направление. Однако для возбуждения ротору по-прежнему требуется дополнительный источник постоянного тока.
Они используются в отраслях, где требуется постоянная скорость при различных нагрузках и требуется точное позиционирование в робототехнике.
Синхронный двигатель без возбуждения
Такой синхронный двигатель, который не требует возбуждения постоянным током, т. е. ротор не требует отдельного источника постоянного тока для создания магнитного потока. В них используются роторы с короткозамкнутым ротором, такие как тот, который используется в асинхронном двигателе.
Реактивный двигатель
Это однофазный синхронный двигатель, работающий по принципу создания крутящего момента на основе магнитного сопротивления. Существует два типа обмоток статора: основные обмотки и вспомогательные обмотки. Вспомогательные обмотки используются для запуска двигателя. Он имеет ротор с короткозамкнутым ротором (без обмоток), как и в асинхронном двигателе, изготовленном из ферромагнитного материала.
Он имеет ротор с короткозамкнутым ротором (без обмоток), как и в асинхронном двигателе, изготовленном из ферромагнитного материала.
Двигатель запускается как настоящий однофазный асинхронный двигатель, используя вспомогательную обмотку. Как только двигатель достигает скорости, близкой к синхронной, вспомогательная обмотка отключается, а ротор блокируется в синхронизме из-за ферромагнитной природы ротора, пытающегося удержаться в положении с меньшим сопротивлением во вращающемся магнитном поле.
Похожие сообщения:
- Почему нам нужно установить стартер с двигателем?
- Что такое стартер двигателя? Типы пускателей двигателей и методы пуска двигателей
Гистерезисный двигатель
Такой тип синхронного двигателя работает по принципу гистерезисных потерь или остаточного магнетизма, возникающего в роторе. Такие электродвигатели работают как от однофазной, так и от трехфазной сети переменного тока. в однофазном гистерезисном двигателе есть вспомогательная обмотка рядом с основной обмоткой, как в реактивном двигателе. Ротор цилиндрической формы изготовлен из ферромагнитного материала с высокой магнитной сохраняющей способностью или гистерезисными потерями, например из закаленной стали. Ротор поддерживается немагнитным валом.
в однофазном гистерезисном двигателе есть вспомогательная обмотка рядом с основной обмоткой, как в реактивном двигателе. Ротор цилиндрической формы изготовлен из ферромагнитного материала с высокой магнитной сохраняющей способностью или гистерезисными потерями, например из закаленной стали. Ротор поддерживается немагнитным валом.
Двигатель запускается как асинхронный. Вращающееся магнитное поле статора индуцирует вихревые токи в роторе. Вихревой ток создает крутящий момент вместе с гистерезисным крутящим моментом из-за высоких свойств гистерезисных потерь материала ротора. Из-за вихревого крутящего момента двигатель ведет себя как асинхронный двигатель.
Как только двигатель достигает скорости, близкой к синхронной, вращающееся магнитное поле статора синхронно притягивает ротор. Ферромагнитная природа ротора создает противоположные магнитные полюса из-за RMF статора, и он начинает вести себя как постоянный магнит. При такой скорости между статором и ротором нет относительного движения. Так что индукции нет. Следовательно, нет ни вихревых токов, ни вихретокового крутящего момента. Крутящий момент, создаваемый двигателем на синхронной скорости, обусловлен гистерезисом, поэтому он называется двигателем с гистерезисом.
Так что индукции нет. Следовательно, нет ни вихревых токов, ни вихретокового крутящего момента. Крутящий момент, создаваемый двигателем на синхронной скорости, обусловлен гистерезисом, поэтому он называется двигателем с гистерезисом.
Основным преимуществом гистерезисного двигателя является то, что он бесщеточный и внутри ротора нет обмоток. Не издает шума и работает тихо.
Недостатки
- Создает очень низкий крутящий момент
- Если момент нагрузки увеличивается до определенного предела, его скорость падает, поэтому он больше не работает как синхронный двигатель
- Имеет меньшую эффективность
- Доступен только в небольших размерах.
Используется в проигрывателях, которым требуется постоянная скорость для функций записи и воспроизведения. Также электрические часы требуют постоянной скорости и т. д.
Асинхронный двигатель
Тип двигателя переменного тока, который никогда не работает на синхронной скорости, называется асинхронным. Скорость его ротора всегда меньше синхронной скорости. Не требует отдельного возбуждения ротора.
Скорость его ротора всегда меньше синхронной скорости. Не требует отдельного возбуждения ротора.
Асинхронные двигатели кратко делятся на два типа;
- Асинхронный двигатель
- Коллекторный двигатель
Асинхронный двигатель
Асинхронный двигатель представляет собой тип асинхронного двигателя переменного тока, который работает по принципу электромагнитной индукции между статором и ротором. Вращающийся магнитный поток индуцирует ток в роторе из-за электромагнитной индукции, которая создает крутящий момент в роторе. Это наиболее используемый электродвигатель в промышленности.
Он в основном делится на два типа в зависимости от конструкции ротора.
Похожие сообщения:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Асинхронный двигатель с короткозамкнутым ротором
Ротор такого асинхронного двигателя напоминает короткозамкнутый ротор.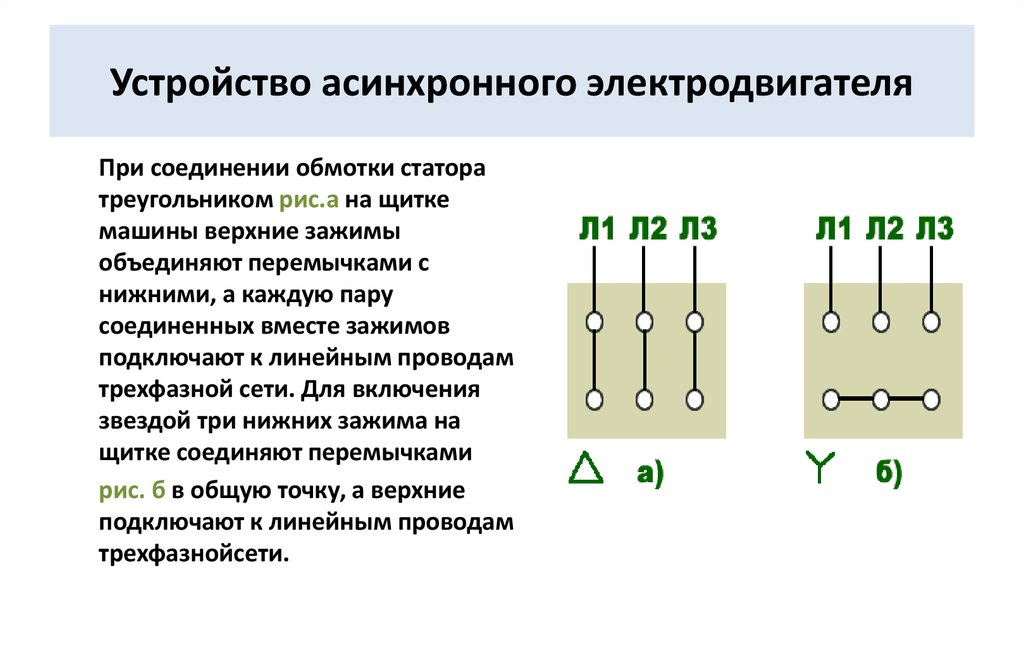 Он сделан из медных стержней, соединенных на обоих концах с помощью проводящего кольца, образуя замкнутую цепь. Электрического соединения с ротором нет.
Он сделан из медных стержней, соединенных на обоих концах с помощью проводящего кольца, образуя замкнутую цепь. Электрического соединения с ротором нет.
Изменяющееся магнитное поле статора индуцирует ток в стержнях ротора. Индуцированный ток создает собственное магнитное поле в роторе, которое взаимодействует с вращающимся магнитным полем статора и пытается устранить его, вращаясь с ним в том же направлении.
Простая конструкция, недорогой и более надежный. Поскольку отсутствует электрическое соединение или сборка коллектора и щетки, требуется меньше обслуживания.
Асинхронный двигатель с контактным кольцом или ротором
A контактное кольцо или асинхронный двигатель с фазным ротором — это другой тип асинхронного двигателя, в котором ротор состоит из обмоток, соединенных с контактными кольцами. Токосъемные кольца используются для подключения обмоток к внешним резисторам для управления током ротора и, следовательно, позволяют управлять характеристиками скорости/крутящего момента.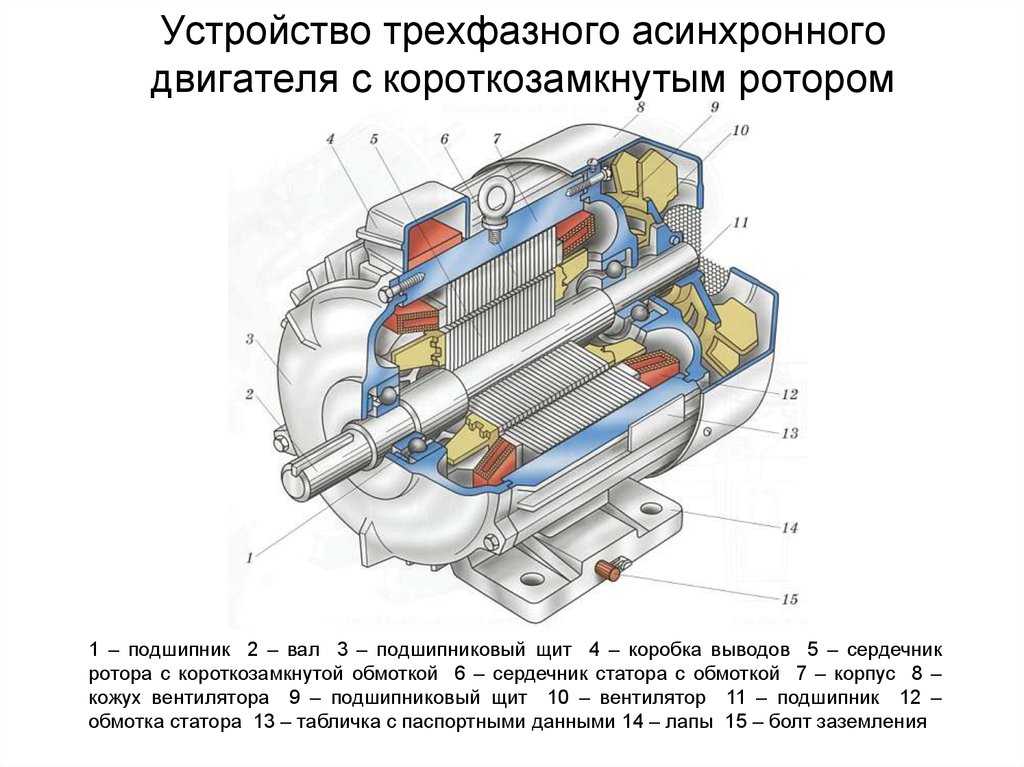
Он имеет тот же принцип работы, что и асинхронный двигатель с короткозамкнутым ротором, за исключением того, что индуктивным током в роторе можно управлять с помощью внешних резисторов. Внешнее сопротивление также помогает увеличить сопротивление ротора во время запуска двигателя, чтобы уменьшить высокий пусковой ток. Это также увеличивает пусковой момент для левой высокоинерционной нагрузки.
Недостатком контактных колец является то, что они постоянно скользят вместе со щетками, что требует дорогостоящего обслуживания из-за механического износа. Конструкция сложная и дороже, чем двигатель с короткозамкнутым ротором.
- Связанный пост: Разница между однофазным и трехфазным асинхронным двигателем
Пусковой асинхронный двигатель с конденсатором
Это однофазный асинхронный двигатель, в котором последовательно с вспомогательной обмоткой используется конденсатор для создания дополнительного крутящего момента во время пуска. Его название ясно указывает на то, что конденсатор используется только для запуска двигателя и отключается, когда двигатель достигает скорости, близкой к синхронной, с помощью центробежного переключателя.
Его название ясно указывает на то, что конденсатор используется только для запуска двигателя и отключается, когда двигатель достигает скорости, близкой к синхронной, с помощью центробежного переключателя.
Он имеет две обмотки статора, называемые основной обмоткой и вспомогательной обмоткой. Вспомогательная обмотка включена последовательно с конденсатором с помощью центробежного переключателя. Когда двигатель запускается, ток протекает через обе обмотки, создавая высокий пусковой момент. Как только двигатель достигает 70-80% полной скорости, центробежный выключатель отключает питание вспомогательных обмоток. Двигатель возобновляет работу на основной обмотке.
Конденсаторный пусковой и конденсаторный двигатель
Это также однофазный асинхронный двигатель, но в его работе используются два конденсатора. Два конденсатора — это пусковой конденсатор и рабочий конденсатор. Пусковой конденсатор используется только для запуска конденсатора, чтобы обеспечить очень высокий пусковой момент, в то время как рабочий конденсатор используется постоянно для нормальной работы двигателя.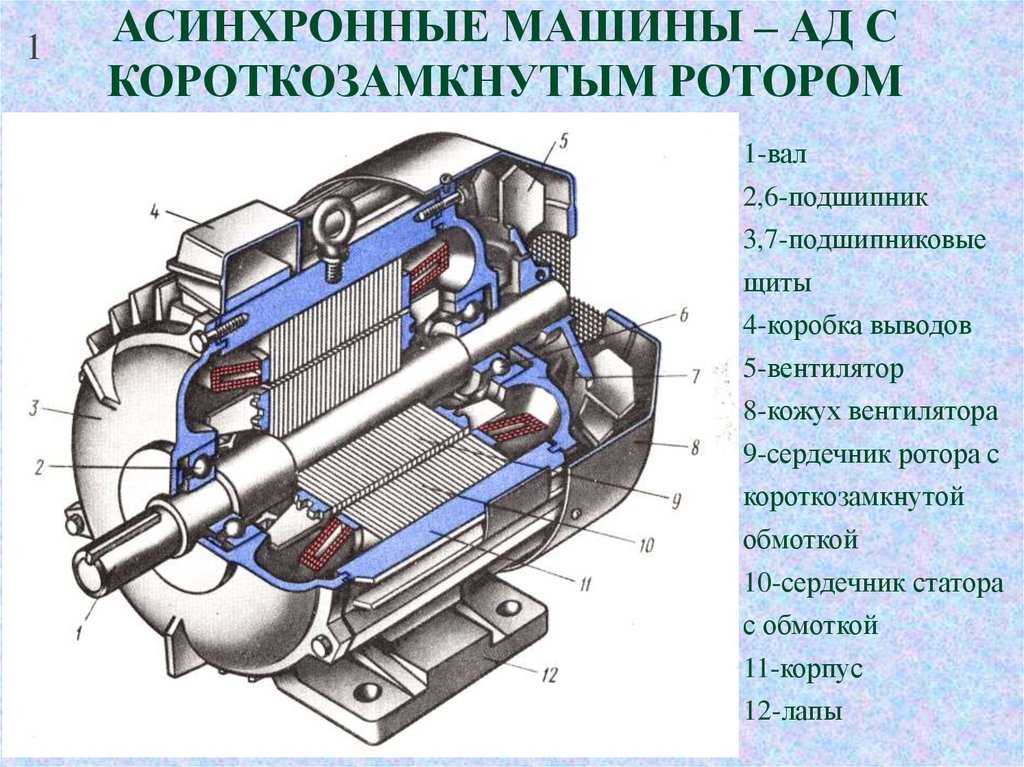 Пусковой конденсатор подключается и отключается с помощью центробежного переключателя.
Пусковой конденсатор подключается и отключается с помощью центробежного переключателя.
Когда двигатель запускается, оба конденсатора подключаются, создавая высокий пусковой момент для ротора. По мере набора скорости ротора выключатель отключает пусковой конденсатор. В таком двигателе постоянно используются как основная, так и вспомогательная обмотки, поэтому его работа более плавная, чем двигатель, работающий только от основной обмотки, такой как двигатели с конденсаторным двигателем.
Сообщение по теме: Какова роль конденсатора в двигателях потолочного вентилятора?
Коллекторный двигатель
Это тип двигателя переменного тока, в котором для питания ротора используется коллектор и щеточный узел. Такие электродвигатели имеют ротор фазного типа.
Двигатель серии переменного тока
Как известно, электродвигатели имеют два типа обмоток: обмотки статора, известные как обмотки возбуждения, и обмотки ротора или обмотки якоря.
Когда эти обе обмотки соединены последовательно, это называется двигателем с последовательным возбуждением. Он также известен как универсальный двигатель из-за его способности работать как от источника переменного, так и постоянного тока.
Обмотки возбуждения пропускают такой же ток, что и обмотки ротора. Щетки, подающие ток на обмотку якоря через коммутатор, закорачивают обмотки якоря и действуют как короткозамкнутый трансформатор. Щетки создают дуги, которые уменьшаются с увеличением скорости.
Серийный двигатель переменного тока с компенсацией
Это модифицированная форма двигателя переменного тока, в которой дополнительная обмотка, известная как компенсационная обмотка, добавлена последовательно с существующими обмотками возбуждения и якоря для устранения эффекта трансформатора, который происходит в некомпенсированном последовательном двигателе. .
Компенсационная обмотка добавляется в статор помимо обмоток возбуждения и подключается, как показано на рисунке, для устранения или смягчения проблемы искрения.
Похожие сообщения:
- Типы катушек индуктивности и их применение
- Предохранители и типы предохранителей – конструкция, работа и применение
Репульсный двигатель
Репульсный двигатель также является однофазным двигателем переменного тока, в котором вход переменного тока подается только на обмотку возбуждения или обмотку статора. Обмотки якоря соединены с коллектором. Обмотки якоря закорачиваются с помощью пары короткозамкнутых щеток. Электрическая связь между обмотками возбуждения и обмотками якоря отсутствует. Ток ротора создается за счет индукции.
Щетки сконфигурированы таким образом, что их можно перемещать для изменения угла относительно воображаемой оси статора. Двигатель можно останавливать, запускать и реверсировать, изменяя угол наклона щеток, а также изменяя скорость двигателя.
Поскольку ротор закорочен с помощью щеток для образования петли, ток индуцируется при протекании переменного тока в обмотке возбуждения. Этот индуцированный ток, протекающий в обмотках ротора, создает собственное магнитное поле. Направление магнитного поля зависит от угла наклона щеток. Это магнитное поле взаимодействует с полем статора, и ротор реагирует соответствующим образом. Для вращения щетки слегка поворачиваются на 20° в любом направлении, чтобы двигатель вращался в этом направлении. Размещение кистей на 90° или 180° или 0° остановит двигатель. Изменение угла увеличивает или уменьшает отталкивание между магнитным полем статора и ротора, а скорость вращения ротора меняется.
Стартовый крутящий момент также можно регулировать, изменяя угол наклона щеток, обеспечивая максимальный пусковой крутящий момент при 45°. Этот двигатель использовался для тяги из-за его превосходного регулирования скорости, но его заменили другие тяговые двигатели.
Похожие сообщения:
- Символы электродвигателей
- Схемы подключения питания и управления трехфазным двигателем
Асинхронный двигатель с отталкивающим пуском
Асинхронный двигатель с отталкивающим пуском, также известный как асинхронный двигатель с отталкивающим пуском, представляет собой модифицированную версию асинхронного двигателя с короткозамкнутым ротором, в котором используется высокий пусковой крутящий момент двигателя отталкивания. асинхронный двигатель с короткозамкнутым ротором.
Имеется специальный механизм для запуска и работы двигателя. Во время запуска двигателя пара короткозамкнутых щеток соединяется с коллектором под углом, как в репульсионном двигателе. Как только двигатель набирает скорость, механизм поднимает щетки и соединяет стержень вместе, закорачивая коммутатор, образуя ротор с короткозамкнутым ротором. Двигатель возобновляет работу как асинхронный двигатель.
Преимущество репульсионного пуска в 5-6 раз выше пускового момента по сравнению с любым другим асинхронным двигателем. Щетки также имеют более длительный срок службы, поскольку они используются только для запуска двигателя. Следовательно, эти электродвигатели имеют высокий механический срок службы и требуют меньшего обслуживания.
Двигатель постоянного тока
Двигатель постоянного тока — это еще один основной тип электродвигателя, который работает только от постоянного или постоянного тока. В постоянном токе нет фаз, поэтому электродвигатели постоянного тока используют для работы только 2 провода. Это первые изобретённые двигатели. Его скоростью легче управлять, лишь изменяя напряжение питания. Он предлагает простые механизмы запуска, остановки, ускорения и реверса. Стоимость установки двигателя постоянного тока очень низкая, но они требуют обслуживания, стоимость которого значительно возрастает с увеличением размера и мощности двигателя.
- Связанная запись: Разница между двигателями переменного и постоянного тока
Основным принципом работы двигателей постоянного тока является правило левой руки Флеминга. Проводник с током внутри магнитного поля испытывает взаимно перпендикулярную силу тяги.
Двигатели постоянного тока можно кратко разделить на следующие типы:
- Коллекторный двигатель постоянного тока
- Бесщеточный двигатель постоянного тока
- Электродвигатели постоянного тока без сердечника или без сердечника
Коллекторный двигатель постоянного тока
Как следует из названия, такие электродвигатели постоянного тока имеют щетки и коллекторы. Они используются для соединения стационарного контура с вращающимся контуром. В этом случае обмотка ротора двигателя запитывается через токопроводящие щетки. Недостатком любого щеточного двигателя является то, что они требуют частого обслуживания из-за постоянного скольжения щеток и образования искр между ними. Однако они довольно просты по конструкции и стоят дорого.
Коллекторные электродвигатели постоянного тока далее классифицируются в
- Двигатель с независимым возбуждением
- Двигатель постоянного тока с самовозбуждением
- Электродвигатель постоянного тока с постоянными магнитами
Двигатель постоянного тока с независимым возбуждением
Такой тип двигателей постоянного тока имеет отдельное возбуждение. Возбуждение относится к возбуждению обмоток возбуждения, также известных как обмотки статора. Обе обмотки, то есть обмотки возбуждения и обмотки якоря, подключаются к отдельному источнику питания.
В такой конфигурации мы можем самостоятельно усилить магнитное поле, увеличив возбуждение постоянным током без изменения тока якоря. Это главная отличительная черта того, что ток якоря не протекает через обмотку возбуждения.
- Связанный пост: Машина постоянного тока – конструкция, работа, типы и применение
Двигатель постоянного тока с самовозбуждением
Этот тип коллекторных двигателей постоянного тока имеет обмотки возбуждения с самовозбуждением. Обмотка возбуждения электрически связана с обмотками якоря. Один источник питания питает обе обмотки. Поэтому он не требует отдельного источника возбуждения.
Однако обмотки возбуждения могут быть соединены последовательно, параллельно и частично последовательно с обмотками якоря. Вот почему двигатели постоянного тока с самовозбуждением подразделяются на следующие типы.
- Серийная рана
- Шунтирующая рана
- Сложная рана
Двигатель постоянного тока с последовательной обмоткой
В двигателе постоянного тока с последовательной обмоткой обмотка возбуждения соединена последовательно с обмоткой якоря. Поэтому ток, протекающий через обмотки возбуждения, такой же, как и ток, протекающий через обмотки якоря.
Скорость таких электродвигателей меняется в зависимости от нагрузки, подключенной к двигателю.
Двигатель постоянного тока с шунтирующей обмоткой
Такие двигатели постоянного тока имеют обмотку возбуждения (также известную как шунтирующая обмотка возбуждения), соединенную параллельно с обмоткой якоря. Он допускает полное напряжение на клеммах обмотки возбуждения, в то время как обе обмотки имеют одинаковое напряжение на ней. В то время как подаваемый ток делится на ток возбуждения и ток якоря.
Такие электродвигатели используются для его применения с постоянной скоростью, поскольку он поддерживает свою скорость в диапазоне связанных с ним нагрузок. Шунтирующая обмотка относится к обмоткам, соединенным параллельно.
Related Posts:
- Стартер со звездой-треугольником – (Y-Δ) стартер, схема питания, управления и проводки
- Способ пуска стартера со звездой-треугольником без таймера
Двигатель постоянного тока со сложной обмоткой
Двигатель постоянного тока с комбинированной обмоткой использует характеристики как двигателя постоянного тока с последовательной обмоткой, так и двигателя постоянного тока с параллельной обмоткой. он сочетает в себе как параллельную, так и последовательную комбинацию обмоток возбуждения и якоря.
Из-за сочетания последовательной и параллельной обмоток двигатели с комбинированной обмоткой можно разделить на следующие два типа в зависимости от характера обмоток.
- Кумулятивный компаунд
- Дифференциальный состав
Совокупное соединение
Когда шунтирующее поле и обмотки последовательного возбуждения создают поток в одном и том же направлении, поток шунтирующего поля помогает увеличить поток основного последовательного поля, говорят, что двигатель является двигателем с кумулятивной составной обмоткой.
Общий поток, генерируемый в таком случае, всегда больше, чем первоначальный поток.
Дифференциально-составной
Когда шунтирующее поле и обмотки последовательного возбуждения создают поток в противоположном направлении, поток уменьшает влияние друг друга, говорят, что это дифференциально-составной двигатель постоянного тока.
Общий генерируемый поток всегда меньше исходного. Они не находят практического применения в промышленности.
Оба составных двигателя могут быть короткошунтовыми и длинношунтовыми в зависимости от расположения обмоток. Короткий шунт и длинный шунт двигателя постоянного тока объясняются ниже.
Двигатель постоянного тока с коротким шунтом
Двигатель называется двигателем постоянного тока с коротким шунтом, если шунтирующие обмотки возбуждения параллельны только обмоткам якоря и включены последовательно с обмотками возбуждения, как показано на рисунке ниже. Он также известен как двигатель с комбинированной обмоткой.
Двигатель постоянного тока с длинным шунтом
Двигатель постоянного тока называется двигателем с длинным шунтом, если указанные шунтирующие обмотки возбуждения параллельны как обмотке якоря, так и обмотке возбуждения.
- Связанный пост: Регулирование скорости двигателя постоянного тока – методы управления напряжением, реостатом и потоком
Двигатель постоянного тока с постоянными магнитами (PMDC)
Двигатель постоянного тока с постоянными магнитами, также известный как двигатель постоянного тока с постоянными магнитами, представляет собой еще один тип коллекторного двигателя постоянного тока. Он имеет обычный якорь, как и остальные щеточные электродвигатели постоянного тока, описанные выше. Однако здесь нет статора или обмотки возбуждения, магнитное поле создается с помощью постоянного магнита, размещенного в статоре.
Когда обмотки якоря, несущие входной ток, расположены внутри северного и южного полюсов магнита. Магнитное поле взаимодействует с ним, и якорь испытывает вращательную силу.
Постоянный магнит создает постоянное магнитное поле, которое заложено во время строительства и не может быть изменено после этого. Однако сила магнита со временем уменьшается. В некоторых конструкциях имеется дополнительное поле возбуждения, которое помогает увеличить его магнитную силу при его уменьшении.
PMDC не требует возбуждения поля для создания потока поля, так как он создается постоянным магнитом. Это повышает его эффективность, так как на возбуждение не расходуется дополнительная мощность. Отсутствие обмотки возбуждения значительно уменьшает габариты двигателя. Поэтому двигатели PMDC имеют компактную конструкцию. Они также очень дешевле и лучше всего подходят для приложений с низким энергопотреблением.
Связанная статья: Уравнение мощности, напряжения и ЭДС двигателя постоянного тока – формулы
Бесщеточный двигатель постоянного тока
Как следует из названия, бесщеточный или бесщеточный двигатель постоянного тока — это еще один основной тип двигателя постоянного тока, который не имеет угольных щеток и коллекторов в сборе. Это означает, что входная мощность подается не на вращающуюся часть двигателя, а на статор двигателя, который в данном случае состоит из нескольких обмоток, а ротор состоит из постоянного магнита.
Он имеет несколько обмоток статора, каждая из которых расположена под разными углами для создания потока в разных направлениях. Вход переключается между обмотками статора для создания магнитного поля, которое толкает и тянет магнитное поле ротора, заставляя его вращаться в своем направлении. Датчик Холла используется для определения положения ротора и переключения входа на правильную обмотку статора соответственно.
Поскольку вход постоянного тока на статор необходимо переключать, в таких электродвигателях использовалась электронная коммутация вместо механической коммутации с использованием переключающих устройств, таких как тиристоры. Эти переключатели управляются с помощью микроконтроллера для точного переключения входа между обмотками статора. По сути, он переключает вход постоянного тока на трехфазное питание, которое создает плавное вращающееся магнитное поле.
Скорость бесщеточного двигателя зависит от частоты переменного тока, подаваемого контроллером. Поэтому его еще называют 9.0291 синхронный двигатель
Контроллер, используемый для бесщеточного двигателя, более сложный и очень дорогой. Он не работает без своего контроллера, который также обеспечивает точное управление скоростью и позиционированием ротора. Но стоимость контроллера намного больше, чем стоимость самого двигателя.
Поскольку нет щеток, нет электрических или электромагнитных помех и искр, возникающих при механической коммутации. Это помогает увеличить срок службы двигателя, а также эффективность двигателя. Энергия, рассеиваемая щетками, преобразуется в механическую мощность. И они также не требуют обслуживания.
Связанный пост: Разница между щеточным и бесщеточным двигателем
Двигатели постоянного тока без сердечника или без сердечника
Как следует из названия, такие двигатели постоянного тока не имеют многослойного железного сердечника. Обмотка ротора намотана косой или сотовой формой, образуя самонесущую полую клетку, часто изготавливаемую с использованием эпоксидной смолы. Ротор из постоянных магнитов установлен в полом роторе.
Конструкция без сердечника устраняет проблемы и потери, связанные с железными сердечниками традиционных двигателей. Например, такие электродвигатели не имеют потерь в стали, что увеличивает КПД двигателя до 90%. Конструкция также уменьшает индуктивность обмотки, что уменьшает искры, образующиеся между щетками и коллектором, тем самым увеличивая срок службы двигателя. Это также уменьшает массу и инерцию ротора, что также увеличивает скорость ускорения и замедления двигателя.
Специальные двигатели
Существует несколько типов специальных электродвигателей, которые представляют собой модифицированные версии других двигателей, предназначенных для специальных целей. Некоторые из этих электродвигателей приведены ниже.
Серводвигатели
Серводвигатель — это особый тип двигателя, используемый для толкания/тяги, подъема или вращения объекта под определенным углом. Серводвигатель может быть рассчитан на работу как от сети переменного, так и постоянного тока. Серводвигатель, который работает от источника постоянного тока, называется серводвигателем постоянного тока, а те, которые работают от переменного тока, называются серводвигателем переменного тока. Это простой двигатель с контроллером и несколькими шестернями для увеличения крутящего момента.
Эти двигатели рассчитаны в кг/см (килограмм на сантиметр). Он указывает, какой вес сервопривод может поднять на определенном расстоянии. Например. сервопривод мощностью 3 кг/см может поднять груз массой 3 кг, который находится на расстоянии 1 см от его вала. Грузоподъемность снижается с увеличением расстояния.
Серводвигатель состоит из редуктора, контроллера, датчика и системы обратной связи. Зубчатая передача используется для уменьшения скорости и значительного увеличения крутящего момента. Контроллер используется для сравнения входного сигнала (заданное положение) и сигнала от датчика (фактическое положение сервопривода), полученного через систему обратной связи. Контроллер сравнивает эти два сигнала и устраняет ошибку между ними, вращая вал двигателя.
Серводвигатели имеет три провода. Два из них используются для подачи питания, а третий используется для управления положением сервопривода. Он управляется путем подачи пульсирующего сигнала через микроконтроллер с использованием ШИМ (широтно-импульсной модуляции).
Сервопривод может поворачиваться на 90° в любом направлении, что в сумме составляет 180°. В нейтральном положении он находится в среднем положении под углом 90°. Он может вращаться, изменяя ширину импульса от 1 мс до 2 мс, где 1 мс соответствует 0°, 1,5 мс соответствует 90°, а 2 мс соответствует углу вала 180°.
Прямой привод
Двигатель с прямым приводом, также известный как моментный двигатель, представляет собой еще один тип двигателя, который создает высокий крутящий момент на низкой скорости, даже когда он глохнет. Полезная нагрузка напрямую связана с ротором, что исключает использование редуктора, ремней, редукторов и т. д. Это бесщеточный синхронный двигатель с постоянными магнитами без коммутаторов и щеток. Поскольку нет механического износа, он надежен и имеет длительный срок службы. Тот факт, что в нем меньше механических частей, означает, что он требует меньшего обслуживания и низкой стоимости.
Похожие сообщения:
- Привод переменного тока – работа и типы электрических приводов и ЧРП
- Привод постоянного тока – работа и типы приводов постоянного тока
Линейные двигатели
Линейный двигатель имеет развернутые статор и ротор, которые создают линейную силу вместо силы вращения. Если вы нарежете любой двигатель и положите его на поверхность, вы получите линейный двигатель.
Обмотки якоря имеют линейную конструкцию, которая пропускает трехфазный ток для создания магнитного поля. магнитное поле не вращается, а движется прямолинейно. Магнитное поле взаимодействует с магнитным полем, создаваемым плоским постоянным магнитом, лежащим под ним. Взаимодействие между ними создает линейную силу друг на друга, поэтому якорь движется вперед или назад.
Это двигатель переменного тока с контроллером, таким как серводвигатель. Питание подается на первичную часть двигателя, содержащую обмотки. Он генерирует собственное магнитное поле, полярность которого зависит от фазы питания переменного тока. Вторичная часть двигателя представляет собой постоянный магнит, магнитное поле которого взаимодействует с магнитным полем первичной части и в результате притягивает и отталкивает его, создавая линейную силу. Величина тока определяет силу, а скорость изменения тока определяет скорость первичной части.
Линейные двигатели используются в робототехнике, медицинском оборудовании, автоматизации производства и т. д.
Шаговый двигатель
Шаговый двигатель или шаговый двигатель — это бесщеточный двигатель постоянного тока, полный оборот которого делится на несколько равных шагов. Такой двигатель вращается ступенчато (фиксированные градусы), а не непрерывно. Такое шаговое движение обеспечивает большую точность, которая используется в робототехнике.
Шаговый двигатель работает в импульсном режиме. Каждый импульс перемещает двигатель на один шаг. Точность двигателя зависит от количества шагов на оборот. Размер ступеней определяется при ее проектировании. Однако скоростью двигателя можно управлять, применяя последовательность импульсов переменной частоты. Контроллер внутри серводвигателя перемещает ротор вперед или назад на один шаг при каждом импульсе.
Используется для точного и точного позиционирования. Он обеспечивает полный крутящий момент в состоянии покоя. Он требует меньше обслуживания благодаря бесщеточной конструкции. Таким образом, они очень надежны и имеют долгий срок службы.
Шаговый двигатель благодаря точному позиционированию используется в промышленных станках, используемых для автоматического изготовления изделий, станках с ЧПУ. Он также нашел применение в медицинских инструментах и машинах, а также в камерах видеонаблюдения. Степпер широко используется в электронных гаджетах и других интеллектуальных электронных системах.
- Связанный пост: Формулы и уравнения синхронных, шаговых и двигателей переменного тока
Универсальный двигатель
Универсальный двигатель — это особый тип двигателя, который может работать как от сети переменного, так и постоянного тока. это щеточный двигатель с последовательным возбуждением, в котором обмотки возбуждения соединены последовательно с обмотками якоря. Они обеспечивают максимальный пусковой крутящий момент при высокой рабочей скорости.
Поскольку обмотки соединены последовательно, направление тока через обе обмотки остается одинаковым, даже если направление тока изменяется несколько раз в секунду. Хотя двигатель может работать медленнее на переменном токе из-за реактивного сопротивления обмоток.
Связанные сообщения об электродвигателях:
- Почему мощность двигателя указана в кВт, а не в кВА?
- Пускатель прямого действия — схема подключения пускателя DOL для двигателей
- Расчет размера кабеля для двигателей LT и HT
- Что такое КПД двигателя и как его повысить?
- Защита двигателя – Типы неисправностей и защитные устройства
Основы выбора двигателя: двигатели переменного/постоянного тока
Какой тип электродвигателя выбрать для конвейера, стола XYZ или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) или постоянного тока (постоянного тока).
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации. Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы внутри этих категорий.
Помните, что некоторые производители могут предлагать как двигатели, так и драйверы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
| Двигатели переменного тока |
Двигатели переменного тока можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с пусковым конденсатором, с пусковым конденсатором/рабочим конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами с разделенным конденсатором, мы рассмотрим только двигатели PSC.
Каждый тип двигателя PSC похож по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Различные типы двигателей переменного тока «PSC»
|
Асинхронные двигатели / асинхронные двигатели
Асинхронные двигатели являются наиболее распространенными и рассчитаны на непрерывную работу. Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показаны конструкция и конструкция асинхронного двигателя.
|
① Фланцевый кронштейн |
Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре. На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
В этой записи блога можно найти дополнительную информацию об асинхронных двигателях переменного тока.
Асинхронные двигатели надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть выполнены за счет комбинации трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
|
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. |
Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для операций пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками. Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.
|
В задней части реверсивного двигателя установлен фрикционный тормозной механизм. Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. |
|
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Двигатели с электромагнитным тормозом сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания. По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым отпуская тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Двигатели с электромагнитным тормозом используются в вертикальных приложениях, где необходимо удерживать груз, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели предназначены для обеспечения высокого пускового крутящего момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постоянно уменьшается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
|
Простая регулировка крутящего момента для натяжения
|
Синхронные двигатели
Синхронные двигатели называются «синхронными», поскольку они используют специальный ротор для синхронизации своей скорости с частотой входной мощности. Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы. Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут работать от источника переменного тока и обеспечивают превосходные характеристики пуска и остановки, их иногда называют «шаговыми двигателями переменного тока».
| Двигатели постоянного тока |
Двигатели постоянного тока используют постоянный ток для питания угольных щеток и коллектора или для электрической коммутации обмоток с драйвером. Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Электродвигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Различные типы двигателей постоянного тока
|
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри щеточного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания. Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются нескольких типов: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные. Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и замкнутой обратной связи, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя. Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Узнайте больше о различиях между щеточными и бесщеточными двигателями
Бесщеточные двигатели и приводные системы часто сравнивают с двигателями переменного тока и системами с частотно-регулируемым приводом. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным размером корпуса.
| Бесколлекторный двигатель + драйвер | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели обладают рядом преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Преимущества бесщеточного двигателя
| Преимущества по сравнению с щеточными двигателями | 9Преимущества 0926 по сравнению с двигателями переменного тока|
|
|
С технической точки зрения бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для еще более точных приложений благодаря их превосходной способности останавливаться в точных местах. Про эти моторы я писал отдельные заметки.
Узнайте о различиях между гибридными шаговыми двигателями, двигателями с постоянными магнитами и шаговыми двигателями с регулируемой скоростью.
Узнайте больше о различиях между серводвигателями и шаговыми двигателями. . Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Этот пост в блоге дает общее представление о многих типах двигателей переменного/постоянного тока, представленных на рынке. В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка. Очень важно найти поставщика двигателей, который может гарантировать качество работы, предоставлять экспертную поддержку для широкого спектра продуктов и поставлять его в разумно короткие сроки.
Готовы к небольшой практике? Какой тип двигателя вы бы использовали для этих приложений?
Нажмите на GIF-файлы приложений ниже, чтобы увидеть рекомендуемые двигатели для этих приложений.
| Конвейер промывки | Стол XYZ |
Темы: конвейер, двигатели переменного тока, Шаговые двигатели, Контроль скорости, Размер двигателя, BLDC двигатели, Смывать, Серводвигатели, Основы управления движением
Различные типы двигателей и их использование
star_borderПодписаться на статью
billd700
10star_border 1вопрос_ответ 6thumb_up
Ваша следующая статья
Дэйв из DesignSpark
Как вы относитесь к этой статье? Помогите нам предоставить лучший контент для вас.
Дэйв из DesignSpark
Спасибо! Ваш отзыв получен.
Дэйв из DesignSpark
Не удалось отправить отзыв. Повторите попытку позже.
Дэйв из DesignSpark
Что вы думаете об этой статье?
При покупке двигателя часто спрашивают, какая технология лучше, переменный или постоянный ток, но дело в том, что это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного тока обладают высокой гибкостью во многих функциях, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока. Некоторые из ключевых преимуществ:
- Низкая мощность запрос на запуск
- Управляемое ускорение
- Регулируемая рабочая скорость
- Регулируемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение помех в сети электропитания
Текущей тенденцией для преобразователей частоты является добавление дополнительных функций и функций программируемого логического управления (ПЛК), которые добавляют преимущества, но требуют более высоких технических знаний при обслуживании.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока из RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока и скорость остается постоянной при различных нагрузках, поэтому идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы, контрольно-измерительные приборы, машины и системы управления технологическими процессами
Щелкните здесь для примера Синхронный двигатель из RS
Асинхронный двигатель
Этот тип двигателя использует электромагнитную индукцию от магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента. Это наиболее распространенный тип двигателя переменного тока, который важен для промышленности из-за его нагрузочной способности, при этом однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовых приборах, тогда как трехфазные асинхронные двигатели больше используются в промышленности. применения, включая компрессоры, насосы, конвейерные системы и подъемное оборудование.
Щелкните здесь для примера Асинхронный двигатель из RS
Двигатели постоянного тока
Двигатели постоянного тока были первым широко используемым типом двигателей, а начальные затраты на системы (двигатели и привод) обычно меньше, чем на системы переменного тока для маломощных агрегатов. Однако при более высокой мощности общие затраты на техническое обслуживание увеличиваются, и это необходимо учитывать. Скорость двигателей постоянного тока можно контролировать, изменяя напряжение питания, они доступны в широком диапазоне напряжений, наиболее популярными типами являются 12 и 24 В. Преимущества двигателя постоянного тока:
- Простая установка
- Регулирование скорости в широком диапазоне
- Быстрый пуск, остановка, реверс и ускорение
- Высокий пусковой момент
- Линейная кривая скорость-момент
Двигатели постоянного тока широко используются в небольших инструментах и приборах, вплоть до электромобилей, лифтов и лебедок. Это более традиционный тип двигателя, который обычно используется в недорогих приложениях, где система управления относительно проста, например, в потребительских приложениях и в более простом промышленном оборудовании. Эти типы двигателей можно разделить на:
- Серийная обмотка — здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а управление скоростью осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента двигателя скорость падает. Применение включает в себя автомобили, подъемники, подъемники и краны, поскольку он имеет высокий пусковой крутящий момент.

- Шунтовая обмотка – Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости за счет увеличения тока двигателя. Он имеет средний уровень пускового крутящего момента при постоянной скорости, поэтому подходит для таких применений, как токарные станки, пылесосы, конвейеры и шлифовальные машины.
- Составная обмотка – совокупность последовательных и шунтирующих, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям. Этот тип имеет высокий пусковой крутящий момент и может работать плавно при незначительном изменении нагрузки. Он используется для привода компрессоров, центробежных насосов с переменным напором, ротационных прессов, циркулярных пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, требующих точного управления и низкого крутящего момента, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы при интенсивном использовании), и имеют гораздо более простую механическую конструкцию (без щеток). Контроллер двигателя использует датчики Холла для определения положения ротора, благодаря чему контроллер может точно управлять двигателем с помощью тока в обмотках ротора для регулирования скорости. Преимуществом этой технологии является длительный срок службы, минимальное техническое обслуживание и высокая эффективность (85-90%), а недостатками являются более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для управления скоростью и положением в приложениях, где требуются надежность и прочность, таких как вентиляторы, насосы и компрессоры.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением без обратной связи, от принтеров до промышленных приложений, таких как высокоскоростное оборудование для захвата и размещения.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет контролировать скорость, крутящий момент и положение двигателя, а интеллектуальная электроника управляет всеми тремя параметрами, поэтому, если для быстрого разгона до определенной скорости требуется больший крутящий момент, требуется больший ток. доставлены, они известны как бесщеточные серводвигатели.
Пример щеточного и бесщеточного двигателей постоянного тока
Хотите продолжить чтение статей от DesignSpark?
Станьте участником, чтобы бесплатно получить неограниченный доступ ко всему контенту DesignSpark!
Зарегистрируйтесь, чтобы стать участником
Уже являетесь участником DesignSpark? Логин
Поделиться этой записью
thumb_upМне нравится star_borderПодписаться на статью
Опыт работы в области электроники и электротехники, внимательное отношение к инновациям и принципам работы.
Рекомендуемые статьи
Ваша следующая статья
22 Типы электродвигателей и их характеристики
Типы электродвигателей включают двигатели переменного тока, постоянного тока, щеточные, бесщеточные, шаговые, серводвигатели, универсальные, гистерезисные, синхронные, асинхронные, составные, однофазные, трехфазные, линейные и асинхронные двигатели.
Электродвигатель сам по себе является электромеханическим устройством, которое преобразует электричество в механическую энергию в виде вращательного движения по принципу электромагнитной индукции [11].
Факторы, используемые для классификации типов электродвигателей, включают источник тока, конструкцию конструкции, скорость вращения, режим работы и назначение.
В этой статье обсуждаются типы электродвигателей и критерии их классификации в соответствии с приведенной ниже схемой;
-An Overview of the Types of Electric Motors
-Comparing Types of Electric Motors: DC and AC Comparison
-Conclusion
An Overview of the Electric Типы двигателей
Двумя основными типами электродвигателей являются двигатели переменного и постоянного тока .
Это основные типы, поскольку тип тока, подаваемого на электродвигатель, определяет его работу, а также его оптимальную конструкцию и другие факторы.
Электродвигатель переменного тока работает от источника переменного тока, в то время как двигатель постоянного тока использует постоянный ток.
Типы электродвигателей рассматриваются ниже в зависимости от факторов, использованных при их классификации; 1). Электродвигатель переменного тока как один из типов электродвигателей
Электродвигатель переменного тока преобразует переменный ток в механическую энергию.
Потенциальные источники электроэнергии для этого типа электродвигателя включают дизельные генераторы и возобновляемые технологии, такие как когенерационные электростанции, атомные электростанции и ветряные турбины .
Генераторы переменного тока также могут быть разных типов из-за различий, основанных на других классификационных факторах, таких как конструкция и работа.
Однако двумя основными (под)типами электродвигателей этой категории являются асинхронные и синхронные двигатели переменного тока. Эти два различаются на основе относительных скоростей вращения статора и ротора.
Электродвигатели переменного тока более широко используются, чем двигатели постоянного тока. Это связано с тем, что переменный ток является более практичной и универсальной формой электрического тока, что дает двигателю переменного тока более широкий спектр применения.
Двигатель переменного тока как один из типов электрических двигателей Электродвигатель постоянного токаЭлектродвигатель постоянного тока преобразует постоянный ток в механическую энергию в форме вращательного движения за счет эффекта электромагнетизма.
В отличие от других типов электродвигателей, которые могут получать заряд от электрогенератора, двигатель постоянного тока обычно зависит от батареи в качестве источника питания [2].
В этой категории есть три основных подтипа: двигатели с постоянным током, параллельные, последовательные и со смешанной обмоткой.
Двигатель постоянного тока как один из типов электродвигателей (Источник: Ильякрив, 2009 г. .CC BY-SA 3.0.)
С точки зрения конструкции и конструкции двигатель постоянного тока проще своего аналога переменного тока.
Из-за однонаправленного потока электричества постоянного тока двигатели постоянного тока не работают в фазах. Их выходом также можно управлять, изменяя величину подаваемого напряжения.
— Типы электродвигателей на основе конструкции
3). Коллекторный электродвигатель
Коллекторные электродвигатели оснащены «щетками», которые представляют собой подвижные соединительные клеммы, подающие электрический ток на катушку проводника.
Щетки используются наряду с коммутаторами для передачи тока от стационарного источника к вращающейся катушке [17]. Они могут возникать как в двигателях переменного, так и постоянного тока.
Хотя щеточные электродвигатели имеют простую конструкцию, они требуют серьезного обслуживания и подвержены проблемам с подключением.
4). Бесщеточный электродвигатель как один из типов электродвигателей
Бесщеточные двигатели являются одним из наиболее эффективных типов электродвигателей.
При отсутствии щеток и коммутаторов они зависят от электромагнитной индукции, обеспечивающей движение ротора и преобразование механической энергии. Это называется электронной коммутацией [5].
Для работы бесщеточных двигателей требуются эффективные постоянные магниты. Как правило, они меньше по размеру и более эффективны, чем щеточный электродвигатель.
— Типы электродвигателей в зависимости от режима работы
5). Синхронный электродвигатель как один из типов электродвигателей
Синхронный двигатель можно рассматривать как один из типов электродвигателей, работающих только на переменном токе [8].
Синхронный двигатель работает в стабильных условиях электромеханического преобразования. Это приводит к постоянной скорости вращения, которая может изменяться только при изменении частоты электропитания [4].
Из-за стабильности вращения синхронные двигатели используются в приложениях, требующих точности и согласованности.
Постоянная электромеханическая скорость синхронных двигателей часто достигается за счет возбуждения постоянным током, посредством которого подается постоянный ток для создания магнитного поля [10].
Области применения этого типа электродвигателя включают системы автоматизации, где требуется точность и постоянство.
Электродвигатели других типов можно отнести к категории синхронных. Эти синхронные двигатели отличаются друг от друга другими характеристиками, такими как фаза работы и режим возбуждения.
Синхронный двигатель как один из типов электродвигателей (Источник: MePaJa 2016 .CC BY-SA 4.0.)
6). Асинхронный электродвигатель
Асинхронный двигатель является одним из типов электродвигателей с приводом от переменного тока.
Преобразует переменный ток в механическую энергию в форме вращательного движения, которое не происходит со стабильной или постоянной скоростью.
В отличие от синхронного электродвигателя, асинхронные двигатели не имеют системы возбуждения постоянного тока.
По конструктивному исполнению некоторые второстепенные типы электродвигателей можно отнести к категории асинхронных. К ним относятся коллекторные и асинхронные двигатели.
Асинхронный двигатель как один из типов электродвигателей. Однофазный электродвигательОднофазный электродвигатель работает от однофазной сети переменного тока.
Этот тип тока обычно не создает вращающееся магнитное поле, а создает полупериодное пульсирующее магнитное поле, которое колеблется между 0 и 180°C.
Поскольку создаваемое поле не является вращательным, большинство однофазных электродвигателей не запускаются самостоятельно [13]. Скорее, они зависят от внешнего пускового механизма, который обеспечивает крутящий момент, необходимый для запуска вращательного движения.
Использование однофазного тока подразумевает, что этот тип электродвигателя имеет относительно простой режим работы.
Скорость электромеханического преобразования можно регулировать изменением частоты подачи тока. Однофазные электродвигатели также подходят для относительно простых приложений, таких как электрические часы.
8). Трехфазный электродвигатель как один из типов электродвигателей
Трехфазный электродвигатель работает на переменном токе, который течет одновременно по трем фазам.
Благодаря многофазному питанию это один из типов электродвигателей, который обеспечивает стабильное, постоянное электромеханическое вращение при различных нагрузках.
В отличие от большинства однофазных двигателей, трехфазный двигатель запускается самостоятельно и используется в различных промышленных процессах, требующих постоянства и точности.
Различные типы электродвигателей могут быть отнесены к категории трехфазных на основе различий в конструкции и принципах работы. К ним относятся асинхронные, синхронные и трехфазные асинхронные двигатели.
9). Электродвигатель без возбуждения
Электродвигатель без возбуждения представляет собой широкую группу, включающую различные типы электродвигателей (различных по конструкции и/или принципу действия), которые являются синхронными, но не зависят от возбуждения постоянным током.
Двигатели без возбуждения рассчитаны исключительно на взаимодействие между колеблющимся электромагнитным потоком, создаваемым током в проводнике, и вращающимся потоком, создаваемым обмотками возбуждения или постоянным магнитом.
Некоторые типы электродвигателей, которые можно отнести к этой категории, включают универсальные, репульсные и реактивные двигатели.
10). Электродвигатель с независимым возбуждением как один из типов электродвигателей
В электродвигателе с независимым возбуждением якорь ротора получает отдельное питание постоянным током от обмотки возбуждения статора [15].
Этот режим работы подразумевает, что электромагнитным полем от обмоток можно легко управлять, изменяя источник постоянного тока.
Благодаря высокой производительности и гибкому управлению скоростью двигатели с независимым возбуждением используются в самых разных отраслях промышленности [16].
11). Электродвигатель постоянного тока
Двигатель постоянного тока с постоянными магнитами зависит от постоянного магнита для создания магнитного поля, которое будет взаимодействовать с текущими зарядами в якоре.
Существует сходство между принципом работы двигателя PMDC и традиционными процессами производства электроэнергии . Вращательное движение возникает, когда постоянное магнитное поле взаимодействует с текущими зарядами в проводнике.
Постоянный магнит сам по себе является частью узла статора, заменяя обмотку возбуждения.
Из-за наличия постоянного магнитного поля электродвигатели с постоянным магнитным полем обычно не требуют возбуждения от источника постоянного тока [18]. Это повышает эффективность и производительность по сравнению с другими типами электродвигателей.
Отсутствие обмотки возбуждения также позволяет уменьшить размер двигателя с постоянным током с постоянным током по сравнению с двигателями других типов.
Однако эффективность может снизиться по мере уменьшения силы постоянного магнитного поля. Двигатели PMDC используются для приложений, требующих стабильности и контроля скорости.
12). Шунтирующий электродвигатель постоянного тока как один из типов электродвигателей
Шунтирующий двигатель постоянного тока представляет собой тип электродвигателя, в котором обмотки возбуждения и обмотки якоря соединены параллельно друг другу [3].
Этот тип соединения известен как шунт и служит связующим звеном или путем, по которому ток может протекать от обмоток возбуждения к якорю.
Шунтирующие двигатели постоянного тока имеют самовозбуждение, поскольку ток, используемый для создания вращающегося электромагнитного потока, циркулирует внутри самого двигателя.
Поскольку одинаковое напряжение протекает через обмотки возбуждения и обмотки якоря, крутящий момент может уменьшаться по мере увеличения скорости вращения в шунтирующем двигателе постоянного тока. Этот эффект обусловлен сопротивлением, создаваемым якорем, напряжению от обмоток возбуждения.
Однако шунтирующий двигатель постоянного тока обеспечивает хорошую регулировку и постоянный электромагнитный поток. Крутящий момент также можно увеличить, увеличив ток питания обмотки возбуждения.
13). Электродвигатель серии постоянного тока как один из типов электродвигателей
Двигатель постоянного тока также имеет самовозбуждение и очень похож на шунтирующий двигатель постоянного тока.
Отличаются только конфигурацией электрических цепей обмоток возбуждения и якоря.
В то время как две обмотки (возбуждение, якорь) в параллельном двигателе соединены параллельно, в последовательном двигателе постоянного тока эти компоненты соединены последовательно [9].
Преимущество последовательного соединения заключается в том, что оно позволяет как обмотке возбуждения, так и обмотке якоря работать на полную мощность, поскольку между ними нет заметного сопротивления или падения напряжения.
В результате двигатель постоянного тока создает большой начальный крутящий момент. Эта возможность полезна в системах, где требуется большой пусковой момент, например, в автомобилях.
Однако сила магнитного потока от обмоток возбуждения может уменьшиться во время работы двигателя из-за противодействующей электродвижущей силы (ЭДС) от вращающегося якоря. Это означает, что двигатель серии постоянного тока не может быть идеальным для приложений, где необходимы постоянство и стабильность.
14). Составной электродвигатель постоянного тока
Составной двигатель постоянного тока можно описать как гибридное устройство, обладающее характеристиками двух различных типов электродвигателей. Составной двигатель постоянного тока
сочетает в себе характеристики конструкции и конфигурации параллельных и последовательных двигателей постоянного тока [1].
В этом типе электродвигателя обычно имеется два узла обмотки возбуждения-якоря. Одна из двух сборок имеет последовательное соединение (между якорем и обмотками возбуждения). в то время как другой разделяет параллельное (шунтовое) соединение.
В зависимости от мельчайших подробностей конфигурации и работы составные двигатели постоянного тока можно разделить на подкатегории, включающие короткошунтовые, длинношунтовые, накопительные и дифференциальные двигатели.
В составных двигателях постоянного тока с длинным шунтом шунтирующая обмотка возбуждения имеет параллельное соединение с шунтирующей обмоткой якоря и последовательной обмоткой возбуждения. Составной двигатель постоянного тока с коротким шунтом имеет параллельное соединение только между шунтирующей обмоткой возбуждения и обмоткой якоря, тогда как последовательное соединение происходит также между последовательной обмоткой возбуждения и обмоткой якоря.
В накопительном составном двигателе постоянного тока магнитные потоки от обмотки возбуждения и обмотки якоря не противодействуют друг другу. Скорее, они работают кумулятивно, создавая сильный общий поток с высоким выходным крутящим моментом.
Напротив, составной дифференциальный двигатель постоянного тока создает противоположные потоки от своей обмотки возбуждения и обмотки якоря. Это вызывает обратную зависимость от тока нагрузки, так что общий поток двигателя уменьшается по мере увеличения тока нагрузки.
Дифференциальные составные двигатели обычно не используются для практического применения, поскольку они склонны создавать чрезмерную электродвижущую силу.
15). Линейный электродвигатель как один из типов электродвигателей
Линейный двигатель отличается от других типов электродвигателей конфигурацией его обмотки.
В линейных двигателях обмотки возбуждения (статора) и якоря (ротора) развернуты. Это означает, что проводники вытягиваются, а не наматываются по длине устройства.
В результате такой конфигурации линейный электродвигатель создает электродвижущую силу, которая действует в линейном (а не вращательном или круговом) направлении. Следовательно, вращательный момент отсутствует, поскольку он заменяется линейной силой.
Другой способ описать принцип работы и мощность линейного двигателя — это преобразование электрического тока в поступательное движение [6].
Для достижения своего режима работы линейный электродвигатель имеет плоское поперечное сечение. Во многих случаях это включает в себя плоский постоянный магнит, который создает магнитное поле, взаимодействующее с электромагнитной силой, создаваемой развернутой обмоткой статора (поля).
Когда эти два силовых поля взаимодействуют, создается линейная электромеханическая сила, которая заставляет якорь двигаться в линейном (вперед или назад) направлении, а не в направлении вращения.
В линейном двигателе можно регулировать как линейную электромеханическую силу, так и скорость поступательного движения якоря, соответственно изменяя величину и частоту питающего тока.
16). Электродвигатель серии переменного тока
Двигатель серии переменного тока представляет собой электродвигатель, работающий на переменном токе, обмотки возбуждения и якоря которого соединены последовательно друг с другом.
В результате схожести конструкции с двигателем постоянного тока, двигатель переменного тока также известен как «модифицированный двигатель постоянного тока».
В зависимости от режима протекания тока между обмотками возбуждения и обмотками якоря двигатели серии постоянного тока можно разделить на компенсированные и некомпенсированные.
В некомпенсированных двигателях постоянного тока между обмоткой возбуждения и обмоткой якоря может происходить реверсирование тока. Это можно назвать «трансформаторным эффектом» и возникает из-за противоположных направлений тока в двух обмотках.
Двигатели постоянного тока без компенсации имеют обмотку, последовательно соединенную между обмоткой возбуждения и обмоткой якоря. Этот компонент устраняет эффект трансформатора, устраняя эффект реверсирования тока, возникающий при протекании электричества от обмотки возбуждения к якорю.
17). Шаговый электродвигатель как один из типов электродвигателей
Шаговый электродвигатель производит вращательное движение ступенчатым образом [14].
Вместо того, чтобы производить электромеханическую энергию в форме постоянного вращения, этот тип электродвигателя генерирует электромеханическое вращение, которое совершает один полный оборот за несколько шагов.
Для этого ротор помещается под воздействие внешнего магнитного поля. Это поле заставляет обмотки якоря двигаться импульсами или фазами из-за ступенчатого выравнивания заряженного проводника с полем.
Шаговые двигатели часто бывают бесщеточными и могут требовать минимального обслуживания. Они относительно точны, и их точность зависит от количества шагов в каждом полном обороте. Области применения включают плоттеры, генераторы, средства управления технологическими процессами и другие электронные системы.
Шаговый двигатель как один из типов электродвигателей СерводвигательСерводвигатель или серводвигатель — это тип электродвигателя, предназначенный для управления угловым направлением и скоростью вращения.
Управляя вращением, серводвигатель достигает высокой степени точности, что важно для некоторых приложений, таких как робототехника.
Серводвигатель довольно сложен по своей конструкции и эксплуатации по сравнению с другими типами электродвигателей. Обычно это система, состоящая из зубчатых колес и контроллеров для координации генерации и реализации механической энергии в виде вращательного движения.
Кроме того, серводвигатели могут приводиться в действие как переменным, так и постоянным током. Они также могут генерировать вращательное или линейное движение, в зависимости от их конструкции.
Компоненты серводвигателя включают датчик, систему обратной связи, контроллер и редуктор.
Система обратной связи, датчик и контроллер помогают добиться точности в отношении желаемого угла поворота, а редуктор используется для управления крутящим моментом и скоростью вращения.
В отличие от других двигателей, которые в основном вращаются на 360°, серводвигатель достигает максимального поворота на 180°, который происходит в двух сегментах по 90° каждый.
19).
Гистерезисный электродвигатель Гистерезисный двигатель представляет собой электродвигатель, работа которого основана на гистерезисных потерях остаточного магнетизма.
Он может быть отнесен к синхронным типам электродвигателей и может работать с однофазным или трехфазным питанием.
В двигателях с гистерезисом ротор обычно изготавливается из ферромагнитных материалов с высокими остаточными магнитными свойствами, которые допускают возникновение гистерезисных потерь, таких как сталь.
В качестве альтернативы ротор может состоять из внешнего магнитного кольца и внутреннего немагнитного сердечника [12]. Он также обычно имеет цилиндрическую форму и может быть соединен с валом, не обладающим магнитными свойствами.
Гистерезисные двигатели не используют возбуждение постоянным током. Они скорее создают электромеханическую силу за счет индукции, поскольку ток, протекающий через обмотки якоря (ротора), создает магнитное поле, которое взаимодействует с полем, создаваемым обмотками возбуждения (статора).
После создания электромеханической силы и начала вращения в обмотках вращающегося поля (статора) индуцируется вихревой ток. Этот ток создает электромагнитный момент, который взаимодействует с остаточным магнетизмом из-за гистерезисных потерь в обмотках ротора.
В результате взаимодействия обоих магнитных полей ротор и статор могут вращаться синхронно.
По сравнению с другими типами электродвигателей гистерезисный двигатель имеет простую и эффективную конструкцию, в которой обычно отсутствуют щеточные и роторные обмотки. Однако крутящий момент, создаваемый этим двигателем, относительно невелик.
20). Отталкивающий электродвигатель как один из типов электродвигателей
Двигатель отталкивания представляет собой тип электродвигателя, работа которого основана на отталкивании одноименных полюсов.
Его можно отнести к одному из типов электродвигателей, зависящих от переменного тока, а также обычно работающих от однофазного переменного тока.
В репульсионном двигателе источник тока подключается либо к обмотке возбуждения, либо к обмотке якоря. Также присутствуют коммутаторы и щетки, которые действуют как клеммы для поддержки передачи тока на якорь.
Между обмотками якоря и обмотками возбуждения в репульсионных двигателях обычно нет прямой связи. Скорее ротор достигает движения посредством электромагнитной индукции.
Движение ротора создает электромагнитное поле, синхронное с магнитным полем, создаваемым статором (или обмотками возбуждения). Отталкивание одинаковых полюсов этих двух полей создает крутящий момент, который обеспечивает движущую силу ротора.
Угол поворота 20° обычно применяется к статору, чтобы вызвать непрерывное вращение ротора. Скорость вращения и интенсивность отталкивания можно регулировать, изменяя угол поворота статора.
— Типы электродвигателей по назначению
21). Реактивный электродвигатель
Реактивный электродвигатель работает на основе создания крутящего момента за счет магнитного сопротивления.
В зависимости от принципа работы реактивный двигатель можно отнести к одному из типов электродвигателей, работающих с синхронным однофазным током.
В реактивном двигателе ротор обычно выполнен из ферромагнитного материала без обмоток или постоянных магнитов. Эти подкомпоненты отсутствуют, потому что ротор зависит от неравенства в интенсивности магнитного потока для достижения вращательного движения.
Когда электромагнитное поле индуцируется в статоре реактивного двигателя, это поле воздействует на ротор, изготовленный из ферромагнитного материала.
В результате ротор вынужден выравниваться с полем в области наименьшего сопротивления или отталкивания. Следовательно, ротор совершал вращательное движение синхронно по отношению к электромагнитному полю.
22). Универсальный электродвигатель как один из типов электродвигателей
Универсальный двигатель — тип электродвигателя, предназначенный для создания вращения с переменной скоростью и высоким рабочим крутящим моментом [7].
Они могут использовать однофазный переменный или постоянный ток и могут быть щеточными двигателями, в которых обмотки возбуждения и обмотки якоря соединены последовательным соединением. Последовательное соединение подразумевает, что обе обмотки проводят ток в одном направлении.
Универсальные двигатели идеально подходят для высокоскоростных операций и имеют то преимущество, что они относительно недороги.
Универсальный двигатель как один из типов электродвигателей (Источник: Marrrci 2012 .CC BY-SA 3.0.)
Сравнение типов электродвигателей: сравнение двигателей постоянного и переменного тока
Вывод
Типы электродвигателей:
- Электродвигатель переменного тока
- Электродвигатель постоянного тока
- Коллекторный электродвигатель
- Бесщеточный электродвигатель
- Синхронный электродвигатель
- Асинхронный электродвигатель
- Однофазный электродвигатель
- Трехфазный электродвигатель
- Электродвигатель без возбуждения
- Электродвигатель с независимым возбуждением
- Электродвигатель постоянного тока
- Шунтирующий электродвигатель постоянного тока
- Электродвигатель постоянного тока
- Составной электродвигатель постоянного тока
- Линейный электродвигатель
- Электродвигатель серии AC
- Шаговый электродвигатель
- Электродвигатель сервопривода
- Электродвигатель с гистерезисом
- Отталкивающий электродвигатель
- Реактивный электродвигатель
- Универсальный электродвигатель
Каждый из этих типов имеет отличительные характеристики и различается в зависимости от их текущего источника, конструкции, режима работы и применения.
Каталожные номера
1). Аль-Наиб, AMTI (2019). «Двигатели постоянного тока». Доступно по адресу: https://www.researchgate.net/publication/332835517_DC_Motors. (По состоянию на 10 мая 2022 г.).
2). Айинла, Л.; Юсуф, А. (2018). «Проектирование и реализация генератора переменного тока с использованием двигателя постоянного тока». Переработка и использование сырья для устойчивого развития, Инженерный факультет, Университет Ннамди Азикиве, Авка, Нигерия. Том: стр. 1014-1022. Доступно по адресу: https://www.researchgate.net/publication/327338426_Design_and_Implementation_of_an_AC_Power_Generator_using_DC_Motor. (По состоянию на 10 мая 2022 г.).
3). Бабакер, А. (2021). «Реакция шунтирующего двигателя постоянного тока во время запуска». IJIREEICE 9(1):38-44. Доступно по адресу: https://doi.org/10.17148/IJIREEICE.2021.9106. (По состоянию на 10 мая 2022 г.).
4). Эль-Сехиеми, Р. ; Абдельванесс, М. (2015). «Эксплуатационные характеристики асинхронного синхронного двигателя с регулируемой скоростью». Доступно по ссылке: https://www.researchgate.net/publication/287988632_Operation_Performance_of_Variable_Speed_Induction_Synchronous_Motor. (По состоянию на 10 мая 2022 г.).
5). Гамазо-Реал, Дж.; Васкес-Санчес, Э.; Гомес-Хил, Дж. (2010). «Управление положением и скоростью бесщеточных двигателей постоянного тока с использованием бессенсорных методов и тенденций применения». Датчики 10(7). Доступно по ссылке: https://doi.org/10.3390/s100706901. (По состоянию на 10 мая 2022 г.).
6). Гирас, Дж. Ф. (2012). «Линейные электродвигатели». Производство, передача и распределение электроэнергии (стр. 34.1-34.28 (679-706)) Издание: CRC Press Taylor & Franics Group. Доступно по адресу: https://doi.org/10.1201/b12056-40. (По состоянию на 9 мая 2022 г.).
7). Имран, О.А.; Наджмал-Дин, В .; Алмакки, ANJ (2019). «Управление скоростью универсального двигателя». Международный журнал силовой электроники и приводных систем 10(1):41. Доступно по адресу: https://doi.org/10.11591/ijpeds.v10.i1.pp41-47. (По состоянию на 10 мая 2022 г.).
8). Ким, С. (2017). «Двигатели переменного тока». Управление электродвигателем (стр. 95-152). Доступно по адресу: https://doi.org/10.1016/B978-0-12-812138-2.00003-9. (По состоянию на 10 мая).
9). Кундхар, Массачусетс; Джунеджо, А.К.; Саанд, А.С.; Keerio, MU (2016) . «Управление скоростью двигателя постоянного тока с помощью традиционных методов и методов ПЛК». Доступно по адресу: https://www.researchgate.net/publication/343224424_Speed_Control_of_DC_Series_Motor_with_Conventional_and_PLC_Techniques. (По состоянию на 10 мая 2022 г.).
10). Карта.; Лю, В .; Мао, С .; Пэн, Дж.; Луо, Г. (2014). «Метод возбуждения в процессе запуска трехступенчатой бесщеточной синхронной машины». Dianji yu Kongzhi Xuebao/Electric Machines and Control 18(10):68-73, 80. (По состоянию на 10 мая 2022 г.).
11). Мэнни, Д. (2017) . «Различия между электродвигателями и генераторами». Доступно по адресу: https://www.plantengineering.com/articles/differences-between-electric-motors-and-generators/ (по состоянию на 1 мая 2022 г.).
12). Ниасар, А.Х.; Заре, М .; Могбелли, Х. (2013). «Динамическое моделирование и симуляция сверхскоростного гистерезисного двигателя с окружным потоком», Journal of Engineering, vol. 2013 г., идентификатор статьи 898634, 7 страниц, 2013 г.. Доступно по ссылке: https://doi.org/10.1155/2013/898634. (По состоянию на 10 мая 2022 г.).
13). Принси, AJ (2020). «Однофазное замыкание в электродвигателях: причины, последствия и методы защиты». Доступно по адресу: https://www.researchdive.com/blog/induction-motors-main-types-and- Different-applications. (По состоянию на 10 мая 2022 г.).
14). Радж, Р.А.; Сундхантира, П .; Реганатан, Г. (2019). «Моделирование и управление гибридным шаговым двигателем с использованием LabVIEW». IJIREEICE 7(5):49-55. Доступно по адресу: https://doi.org/10.17148/IJIREEICE.2019.7513. (По состоянию на 10 мая 2022 г.).
15). Рамалингам, Н.; Сатишкумар, С.; Баласубрамани, К.; Бубалан, К.; Навин, С .; Шридхар, Н. (2016). «Управление скоростью двигателя постоянного тока с питанием от инвертора с помощью ПИ-регулятора». Доступно по ссылке: https://doi.org/10.9790/1676-1103016569. (По состоянию на 10 мая 2022 г.).
16). Садик, А.А.; Мамман, Б.Х.; Ахмед, М. (2013). «Управление скоростью тока возбуждения двигателя постоянного тока с использованием метода нечеткой логики». Международный журнал информационных и вычислительных технологий, , том 3, номер 8 (2013 г.), стр. 751–756. Доступно по адресу: https://www.researchgate.net/publication/269809133_Field_Current_Speed_Control_of_Direct_Current_Motor_using_Fuzzy_Logic_Technique. (Доступ 9май 2022 г.).
17). Сава, К. Исато, М.; Уэно, Т .; Накано, К .; Кондо, К. (2017). «Коммутационные характеристики и износ щеток двигателя постоянного тока при высокой скорости вращения». Конференция IEEE Holm 2017 по электрическим контактам. Доступно по ссылке: https://doi.org/10.1109/HOLM.2017.8088082. (По состоянию на 10 мая 2022 г.).
18). Тун, З.М.; Наинг, Т.Л. (2018). «Моделирование двигателя PMDC и идентификация параметров для целей управления». Доступно по ссылке: https://www.researchgate.net/publication/325946951_PMDC_Motor_Modeling_and_Parameter_Identification_for_Control_Purpose. (По состоянию на 10 мая 2022 г.).
Различные типы двигателей, используемых в электромобилях
Электрические транспортные средства не являются чем-то новым для этого мира, но технологический прогресс и повышенная забота о контроле над загрязнением окружающей среды придали им мобильность будущего. Основным элементом электромобиля, помимо аккумуляторов для электромобилей, которые заменяют двигатели внутреннего сгорания, является электродвигатель 9.0292 . Быстрое развитие в области силовой электроники и методов управления создало пространство для использования различных типов электродвигателей в электромобилях. Высокий пусковой момент двигателя серии постоянного тока делает его подходящим вариантом для тягового применения. Это был наиболее широко используемый двигатель для тяги в начале 1900-х годов. Преимуществом этого двигателя является легкое регулирование скорости, а также он может выдерживать резкое увеличение нагрузки. Все эти характеристики делают его идеальным тяговым двигателем. Основным недостатком двигателей постоянного тока является высокая потребность в обслуживании из-за щеток и коллекторов. Эти двигатели используются на индийских железных дорогах. Аналогичны двигателям постоянного тока с постоянными магнитами. Бесколлекторным его называют потому, что он не имеет коллекторно-щеточного устройства. Коммутация в этом двигателе осуществляется электронным способом, поэтому двигатели BLDC не требуют технического обслуживания. Двигатели BLDC имеют тяговые характеристики, такие как высокий пусковой крутящий момент, высокий КПД около 95-98% и т. д. Двигатели BLDC подходят для проектирования с высокой удельной мощностью. Двигатели BLDC являются наиболее предпочтительными двигателями для электромобилей из-за их тяговых характеристик. Вы можете узнать больше о двигателях BLDC, сравнив их с обычным коллекторным двигателем. Электродвигатели BLDC также бывают двух типов: i. Двигатель BLDC типа Out-runner: В этом типе ротор двигателя находится снаружи, а статор внутри. ii. Вращающийся двигатель BLDC: В этом типе ротор двигателя находится внутри, а статор снаружи, как у обычных двигателей. Этим двигателям требуется внешняя система трансмиссии для передачи мощности на колеса, из-за этого конфигурация с внешним бегунком немного громоздка по сравнению с конфигурацией с внутренним бегунком. Именно по этим причинам этот двигатель широко используется в электромобилях. Основной недостаток — высокая стоимость из-за постоянных магнитов. Перегрузка двигателя сверх определенного предела сокращает срок службы постоянных магнитов из-за тепловых условий. Этот двигатель также аналогичен двигателю BLDC с постоянными магнитами на роторе . Подобно двигателям BLDC, эти двигатели также обладают такими тяговыми характеристиками, как высокая удельная мощность и высокий КПД. Разница в том, что PMSM имеет синусоидальную противоЭДС, тогда как BLDC имеет трапецеидальную противоЭДС. Асинхронные двигатели не имеют высокого пускового момента, как двигатели постоянного тока серии при работе с фиксированным напряжением и фиксированной частотой. Но эту характеристику можно изменить с помощью различных методов управления, таких как FOC или методы v/f. В двигателях с постоянными магнитами магниты вносят свой вклад в плотность потока B. Поэтому регулировать значение B в асинхронных двигателях проще, чем в двигателях с постоянными магнитами. Это связано с тем, что в асинхронных двигателях значение B можно регулировать, изменяя напряжение и частоту (V/f) в зависимости от требований к крутящему моменту. Это помогает уменьшить потери, что, в свою очередь, повышает эффективность. Tesla Model S — лучший пример, демонстрирующий высокую производительность асинхронных двигателей Электродвигатели, используемые в автомобилестроении, должны иметь такие характеристики, как высокий пусковой крутящий момент, высокая удельная мощность, хороший КПД и т. д.
1. Двигатель постоянного тока Этот двигатель относится к категории коллекторных двигателей постоянного тока.
2. Бесщеточные двигатели постоянного тока Его также называют как Hub Motors , потому что колесо напрямую соединено с внешним ротором. Этот тип двигателей не требует внешнего редуктора. В некоторых случаях сам двигатель имеет встроенные планетарные передачи. Этот двигатель делает автомобиль в целом менее громоздким, поскольку он не требует никакой системы передач. Это также устраняет необходимость в пространстве для установки двигателя. Существует ограничение на размеры двигателя, которое ограничивает выходную мощность в конфигурации с бегунком. Этот двигатель широко используется производителями электрических велосипедов, такими как Hullikal, Tronx, Spero, легкоскоростных велосипедов и т. д. Он также используется производителями двухколесных транспортных средств, такими как 22 Motors, NDS Eco Motors и т. д. Многие производители трехколесных транспортных средств, такие как Goenka Electric Motors, Speego Vehicles, Kinetic Green, Volta Automotive, используют двигатели BLDC. Производители скутеров с низкими и средними характеристиками также используют двигатели BLDC для движения.
3. Синхронный двигатель с постоянными магнитами (СДПМ) Синхронные двигатели с постоянными магнитами доступны для более высоких номинальных мощностей. PMSM — лучший выбор для высокопроизводительных приложений, таких как автомобили, автобусы. Несмотря на высокую стоимость, СДПМ составляет жесткую конкуренцию асинхронным двигателям за счет более высокого КПД, чем у последних. PMSM также дороже, чем двигатели BLDC. Большинство производителей автомобилей используют двигатели PMSM для своих гибридных и электрических транспортных средств . Например, Toyota Prius, Chevrolet Bolt EV, Ford Focus Electric, мотоциклы Zero S/SR, Nissan Leaf, Hinda Accord, BMW i3 и т. д. используют двигатель PMSM для движения.
4. Трехфазные асинхронные двигатели переменного тока При использовании этих методов управления максимальный крутящий момент становится доступным при запуске двигателя, который подходит для тягового применения. Асинхронные двигатели с короткозамкнутым ротором имеют долгий срок службы из-за меньшего обслуживания. Асинхронные двигатели могут быть рассчитаны на КПД до 92-95%. Недостаток асинхронного двигателя заключается в том, что для него требуется сложная схема инвертора, а управление двигателем затруднено . Выбрав асинхронные двигатели, Тесла, возможно, хотел устранить зависимость от постоянных магнитов. Даже Mahindra Reva e2o использует трехфазный асинхронный двигатель для движения. Крупные производители автомобилей, такие как TATA Motors, планируют использовать асинхронные двигатели в своих автомобилях и автобусах. Производитель двухколесных транспортных средств TVS Motors выпустит электрический скутер, в котором для движения используется асинхронный двигатель. Асинхронные двигатели являются предпочтительным выбором для электромобилей, ориентированных на производительность, из-за их низкой стоимости. Другим преимуществом является то, что он может выдерживать суровые условия окружающей среды. Благодаря этим преимуществам индийские железные дороги начали замену двигателей постоянного тока асинхронными двигателями переменного тока.
5. Реактивные реактивные двигатели (SRM)
Реактивные реактивные двигатели относятся к категории двигателей с переменным реактивным сопротивлением с двойной заметностью. Импульсные реактивные двигатели просты по конструкции и надежны. Ротор SRM представляет собой кусок многослойной стали без обмоток или постоянных магнитов . Это уменьшает инерцию ротора, что способствует высокому ускорению. Надежный характер SRM делает его подходящим для высокоскоростных приложений. SRM также предлагает высокую удельную мощность, что является обязательными характеристиками электромобилей. Поскольку выделяемое тепло в основном сосредоточено на статоре, двигатель легче охлаждать. Самым большим недостатком СРМ является сложность в управлении и увеличение схемы включения . У него также есть некоторые проблемы с шумом. Как только SRM выйдет на коммерческий рынок, в будущем он сможет заменить PMSM и асинхронные двигатели.
Советы по выбору подходящего двигателя для вашего электромобиля
Для выбора подходящего двигателя для электромобиля необходимо сначала перечислить требования к характеристикам, которым должен соответствовать автомобиль, условиям эксплуатации и затраты, связанные с ним.
