Какие бывают основные типы электроприводов. Как классифицируются электроприводы по различным признакам. Каковы особенности и области применения разных типов электроприводов. Какие компоненты входят в состав современных электроприводов.
Классификация электроприводов по типу двигателя
Электроприводы можно разделить на несколько основных типов в зависимости от используемого электродвигателя:
- Приводы постоянного тока
- Асинхронные приводы
- Синхронные приводы
- Вентильные приводы
- Шаговые приводы
Каковы особенности каждого типа привода? Приводы постоянного тока обладают хорошей управляемостью, но требуют частого обслуживания из-за наличия щеточно-коллекторного узла. Асинхронные приводы просты и надежны, но имеют сложности с регулированием скорости. Синхронные приводы эффективны, но дороги. Вентильные приводы сочетают преимущества двигателей постоянного и переменного тока. Шаговые приводы обеспечивают точное позиционирование.
Классификация по способу управления
- Нерегулируемые
- Регулируемые
- Программно-управляемые
- Следящие
- Адаптивные
Чем отличаются эти типы приводов? Нерегулируемые работают с постоянной скоростью. Регулируемые позволяют изменять скорость в определенном диапазоне. Программно-управляемые работают по заданной программе. Следящие отрабатывают изменение управляющего сигнала. Адаптивные автоматически подстраиваются под изменяющиеся условия работы.
Основные компоненты современного электропривода
В состав современного электропривода обычно входят следующие основные компоненты:
- Электродвигатель
- Силовой преобразователь
- Устройство управления
- Датчики
- Механическая передача
Какую роль выполняет каждый компонент? Электродвигатель преобразует электрическую энергию в механическую. Силовой преобразователь регулирует параметры питания двигателя. Устройство управления формирует сигналы управления. Датчики обеспечивают обратную связь. Механическая передача согласует параметры двигателя и рабочего органа.
Типы электродвигателей в современных электроприводах
В современных электроприводах применяются различные типы электродвигателей:
- Коллекторные двигатели постоянного тока
- Асинхронные двигатели с короткозамкнутым ротором
- Асинхронные двигатели с фазным ротором
- Синхронные двигатели с электромагнитным возбуждением
- Синхронные двигатели с возбуждением от постоянных магнитов
- Вентильные двигатели
- Шаговые двигатели
Какие преимущества и недостатки у разных типов двигателей? Коллекторные ДПТ обладают хорошей управляемостью, но требуют обслуживания. Асинхронные двигатели просты и надежны. Синхронные имеют высокий КПД. Вентильные сочетают достоинства ДПТ и АД. Шаговые обеспечивают точное позиционирование.
Классификация преобразователей в электроприводах
В электроприводах применяются различные типы преобразователей электрической энергии:
- Выпрямители
- Инверторы
- Преобразователи частоты
- Импульсные преобразователи постоянного тока
- Тиристорные регуляторы напряжения
Для чего используется каждый тип преобразователя? Выпрямители преобразуют переменный ток в постоянный. Инверторы — постоянный в переменный. Преобразователи частоты регулируют частоту и напряжение питания АД. Импульсные преобразователи регулируют напряжение постоянного тока. Тиристорные регуляторы изменяют действующее значение переменного напряжения.
Области применения различных типов электроприводов
Разные типы электроприводов находят применение в различных отраслях:
- Приводы постоянного тока — в металлургии, бумажной промышленности
- Асинхронные приводы — в общепромышленных механизмах
- Синхронные приводы — в мощных компрессорах, вентиляторах
- Вентильные приводы — в станках, роботах, электротранспорте
- Шаговые приводы — в станках с ЧПУ, принтерах
Почему определенные типы приводов используются в конкретных областях? Это зависит от требований к диапазону регулирования скорости, точности позиционирования, динамике, энергоэффективности и других факторов для конкретных механизмов.
Тенденции развития современных электроприводов
Основные направления совершенствования электроприводов в настоящее время:
- Повышение энергоэффективности
- Улучшение массогабаритных показателей
- Расширение функциональных возможностей
- Повышение надежности
- Снижение стоимости
Как достигается улучшение характеристик электроприводов? За счет применения новых конструкционных материалов, совершенствования алгоритмов управления, использования современной силовой электроники, внедрения цифровых систем управления, оптимизации конструкции. Это позволяет создавать более эффективные и функциональные приводы.
Типы электроприводов
Строительные машины и оборудование, справочник
Категория:
Электрооборудование строительных машин
Публикация:
Типы электроприводов
Читать далее:
Режимы работы электроприводов
Типы электроприводов
Применяемые в производстве электроприводы можно подразделить на три основных типа: групповой, одиночный и многодвигательный.
Этот привод из-за ряда существенных недостатков (большие потери энергии в трансмиссиях, остановка всех машин при неисправности электродвигателя, трудность выполнения правил техники безопасности) в настоящее время почти не применяется.
При одиночном электроприводе от одного электродвигателя приводится в действие один производственный механизм. Первоначально одиночный электропривод выполнялся в виде электродвигателя, стоящего отдельно от производственного механизма и связанного с ним ременной (или какой-либо другой) передачей.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 1. Схематическое изображение развития элекгооппи-вода радиально-сверлильното станка
При проектировании индивидуального электропривода стремятся к созданию более тесного конструктивного соединения двигателя с производственным механизмом, т. е. получению наиболее простых по устройству и совершенных механизмов.
Многодвигательным называется привод, который состоит из нескольких одиночных электроприводов, каждый из которых предназначен для приведения в действие определенных рабочих органов производственного механизма. Многодвигательные электроприводы получают все более широкое применение в сложных производственных механизмах, так как упрощают кинематику производственного механизма, повышают его производительность, улучшают качество работы, уменьшают потери энергии в промежуточных передачах, облегчают обслуживание механизма. В строительном производстве многодвигательный электропривод нашел применение в электрифицированных экскаваторах средней и большой производительности, крановых установках и др.
Многодвигательные электроприводы получают все более широкое применение в сложных производственных механизмах, так как упрощают кинематику производственного механизма, повышают его производительность, улучшают качество работы, уменьшают потери энергии в промежуточных передачах, облегчают обслуживание механизма. В строительном производстве многодвигательный электропривод нашел применение в электрифицированных экскаваторах средней и большой производительности, крановых установках и др.
Применение индивидуального и, особенно, многодвигательного электропривода открыло широкие возможности для автоматизации процесса управления производственными механизмами и значительного повышения их производительности. Полная или частичная автоматизация обеспечивает работу механизмов при оптимальных значениях скорости и усилий, а также дает возможность сократить количество обслуживающего персонала.
От выбора того или иного типа электропривода зависят основные эксплуатационные показатели машины: ее производительность, надежность работы, удобство обслуживания, а также во многих случаях — общий вес машины.
В механизмах с безредукторным электроприводом, например в подъемных лебедках мощных экскаваторов или в электроинструментах, промежуточные элементы между электродвигателем и рабочим механизмом отсутствуют. При индивидуальном электроприводе может быть достигнуто настолько тесное соединение двигателя с механизмом, что конструктивно они представляют собой единое целое. Примером такого решения может служить электробарабан, применяемый для привода ленты транспортера.
Рекламные предложения:
Читать далее: Режимы работы электроприводов
Категория: — Электрооборудование строительных машин
Главная → Справочник → Статьи → Форум
1.1. Типы электроприводов
А в т о м а т и з и р о в а н н ы м э л е к
т р о п р и в о д о м называется
электромеханическая система, состоящая
иэ электродвигателя, передаточного
устройств, системы питания и управления,
предназначенных для приведения в
движение исполнительных органов рабочей
машины и управления этим движением, с
целью формирования статических и
динамических характеристик электропривода,
отвечающих требованиям производственного
механизма.
Разнообразные электроприводы с учетом их исторического развития и с точки зрения способов распределения механической энергии можно разделить на три основных типа: групповой; индивидуальный и взаимосвязанный электропривод.
Групповой электропривод обеспечивает движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины. Передача механической энергии от одного двигателя к нескольким рабочим машинам и ее распределение между ними производится с помощью одной или нескольких трансмиссий. Такой групповой привод называют также трансмиссионным (рис. 1.1).
Дальнейшее развитие электропривода было связано с отказом от распределения механической энергии между рабочими машинами, т. е. от трансмиссий, за счет установки на каждую рабочую машину своего электродвигателя ЭД (рис. 1.2).
Однако
при таком электроприводе сохраняются
системы распределения механической
энергии внутри машины, имевшие место и
в трансмиссионном приводе.
.Вследствие своего технического несовершенства трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному.
Индивидуальный привод по сравнению с трансмиссионным и групповым обладает рядом преимуществ: производственные помещения не загромождаются тяжелыми трансмиссиями и передаточными устройствами; улучшаются условия работы и т.д.
При индивидуальном электроприводе за счет того, что каждый рабочий орган машины приводится в движение самостоятельным электродвигателем, рабочие органы машины оказываются уже не связанными друг с другом и поэтому значительно упрощаются механические передачи.
Наконец,
при использовании индивидуального
электропривода создаются наиболее
благоприятные условия для автоматизации
работы машин и технологических процессов.
Индивидуальный электропривод широко применяется в различных современных машинах, например в сложных металлорежущих станках (рис. 1.3), в прокатных станах металлургического производства, в подъемно-транспортных машинах, экскаваторах, в роботах-манипуляторах и т. п.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок или положение исполнительных органов рабочих машин. Необходимость в таком приводе часто возникает по конструктивным или технологическим соображениям.
Примером
взаимосвязанного электропривода может
служить привод цепного конвейера. На
рис. 1.4 показана схема такого привода,
рабочим органом которого является цепь,
приводимая в движение двумя или
несколькими двигателями ,
расположенными вдоль цепи. Эти двигатели
имеют вынужденно одинаковую скорость.
Взаимосвязанный электропривод широко применяется в различных современных машинах и агрегатах.
По степени управляемости электропривод может быть:
1) нерегулируемый — для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью;
2) регулируемый — для сообщения изменяемой скорости исполнительному органу машины;
3) программно-управляемый — управляемый в соответствии с заданной программой;
4) следящий — автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5)
адаптивный
— автоматически избирающий структуру
или параметры системы управления при
изменении условий работы машины с целью
выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле различают электроприводы:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу.
По уровню автоматизации различают электроприводы:
1) неавтоматизированный, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный, управляемый автоматическим регулированием параметров;
3)
автоматический,
в котором управляющее воздействие
вырабатывается автоматическим устройством
без участия оператора.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
типов электроприводов | Электрические двигатели
Типы электрических приводовсостоят из следующих основных частей: нагрузка, двигатель, модулятор мощности, блок управления и источник. Существует большое количество нагрузок, и каждая нагрузка имеет свои специфические требования. Некоторые общие аспекты нагрузок обсуждаются, а конкретные требования к некоторым общим нагрузкам обсуждаются в последующих главах. Здесь мы исследуем четыре типа электрических приводов; а именно двигатели, модуляторы мощности, источники и блок управления.
Электродвигатели
Двигатели, обычно используемые в электроприводах: двигатели постоянного тока – параллельные, последовательные, составные и с постоянными магнитами; Асинхронные двигатели — с короткозамкнутым ротором, с фазным ротором и линейные; Синхронные двигатели — возбужденное поле и постоянный магнит; бесщеточные двигатели постоянного тока; Шаговые двигатели; и переключаемые реактивные двигатели.
В прошлом асинхронные и синхронные двигатели использовались главным образом в приводах с постоянной скоростью. Вариаторы, входящие в состав этих машин, были либо слишком дорогими, либо имели очень низкий КПД. Следовательно, в приводах с регулируемой скоростью преобладали двигатели постоянного тока. 9Двигатели переменного тока 0003
теперь используются в приводах с регулируемой скоростью также благодаря разработке полупроводниковых преобразователей, использующих тиристоры, силовые транзисторы, IGBT и GTO.
Из-за наличия коллектора и щеток двигатели постоянного тока имеют ряд недостатков по сравнению с двигателями переменного тока (асинхронными и синхронными): более высокая стоимость, масса, объем и инерция при той же мощности, необходимость частого обслуживания, непригодность для взрывоопасных и загрязненные среды и ограничения по максимальному напряжению, скорости и номинальной мощности. Асинхронный двигатель с короткозамкнутым ротором, который стоит почти одну треть двигателя постоянного тока того же номинала, чрезвычайно прочен, практически не требует обслуживания и может быть рассчитан на более высокие скорости, крутящий момент и номинальную мощность. Двигатели с фазным ротором дороже, чем двигатели с короткозамкнутым ротором. Их потребности в техническом обслуживании, хотя и больше, чем у двигателей с короткозамкнутым ротором, гораздо меньше по сравнению с двигателями постоянного тока. Они также доступны в номинальной мощности. Синхронные двигатели с возбуждением и постоянными магнитами имеют более высокий КПД и коэффициент мощности при полной нагрузке, чем асинхронные двигатели. Двигатели с обмоткой возбуждения могут быть рассчитаны на более высокую номинальную мощность, чем асинхронные двигатели. Однако по сравнению с асинхронными двигателями с короткозамкнутым ротором они имеют более высокую стоимость и размер при том же номинале и требуют большего обслуживания. Синхронные двигатели с постоянными магнитами обладают всеми преимуществами асинхронных двигателей с короткозамкнутым ротором, за исключением того, что они доступны с меньшей номинальной мощностью.
Двигатели с фазным ротором дороже, чем двигатели с короткозамкнутым ротором. Их потребности в техническом обслуживании, хотя и больше, чем у двигателей с короткозамкнутым ротором, гораздо меньше по сравнению с двигателями постоянного тока. Они также доступны в номинальной мощности. Синхронные двигатели с возбуждением и постоянными магнитами имеют более высокий КПД и коэффициент мощности при полной нагрузке, чем асинхронные двигатели. Двигатели с обмоткой возбуждения могут быть рассчитаны на более высокую номинальную мощность, чем асинхронные двигатели. Однако по сравнению с асинхронными двигателями с короткозамкнутым ротором они имеют более высокую стоимость и размер при том же номинале и требуют большего обслуживания. Синхронные двигатели с постоянными магнитами обладают всеми преимуществами асинхронных двигателей с короткозамкнутым ротором, за исключением того, что они доступны с меньшей номинальной мощностью.
Благодаря многочисленным преимуществам двигателей переменного тока, описанным выше, приводы переменного тока успешно заменили приводы постоянного тока в ряде приложений с регулируемой скоростью.
Бесщеточный двигатель постоянного тока чем-то похож на синхронный двигатель с постоянными магнитами, но имеет меньшую стоимость и требует более простого и дешевого преобразователя. Он рассматривается для маломощных высокоскоростных приводов и сервоприводов в качестве альтернативы серводвигателю постоянного тока, который до сих пор был очень популярен. Серводвигатель постоянного тока имеет все перечисленные выше недостатки коллектора и щеток. При низких уровнях мощности кулоновское трение между щетками и коллектором нежелательно, так как оно неблагоприятно влияет на точность привода в установившемся режиме.
В последнее время шаговый двигатель стал популярным для управления положением, а реактивный реактивный двигатель — для управления скоростью.
Модуляторы мощности
Классифицировать модуляторы мощности сложно. Несколько удовлетворительная классификация:
(a) Преобразователи;
(b) Переменные импедансы и
(c) Коммутационные цепи.
Некоторые приводы могут использовать более одного из этих модуляторов. Будут рассмотрены те модуляторы мощности, которые используются в промышленных приводах.
(a) Преобразователи
Когда модулятор мощности выполняет функцию (iii) (см. Раздел 1.1), его можно классифицировать как преобразователь. Обычно преобразователь также выполняет функцию (i) в дополнение к (ii). В зависимости от схемы он также может выполнять функцию (iv) модулятора мощности. Необходимость в преобразователе возникает, когда характер доступной электроэнергии отличается от той, которая требуется для двигателя. Источники питания обычно бывают следующих типов:
- Фиксированное напряжение и фиксированная частота переменного тока
- Фиксированное напряжение постоянного тока.
Для управления двигателями постоянного тока требуется переменное напряжение постоянного тока, тогда как для двигателей переменного тока требуется либо переменное напряжение переменного тока с фиксированной частотой, либо переменное напряжение переменного тока с переменной частотой.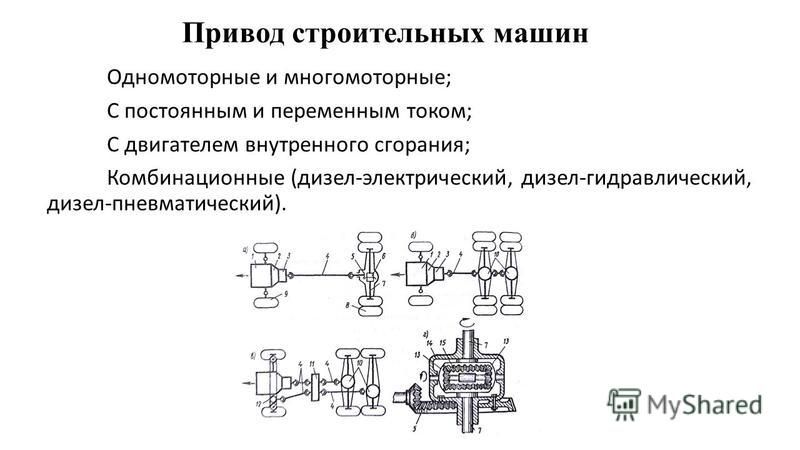 Этим требованиям к двигателю удовлетворяют следующие преобразователи и их комбинации:
Этим требованиям к двигателю удовлетворяют следующие преобразователи и их комбинации:
1.Преобразователи переменного тока в постоянный:
Преобразователи переменного тока в постоянный показаны на рис. 1.2. Преобразователь рис. 1.2 (а) используется для получения постоянного питания фиксированного напряжения. от сети переменного тока фиксированного напряжения. Такой преобразователь известен как неуправляемый выпрямитель. Преобразователи, показанные на рис. 1.2 (b)–(j), позволяют получать переменное напряжение постоянного тока из источника переменного тока с фиксированным напряжением. В преобразователях рис. I.2(b) и (c), плавное изменение выходного напряжения может быть достигнуто за счет управления углом открытия тиристоров преобразователя маломощными сигналами от блока управления. Преобразователь на рис. 1.2 (b) является двухквадрантным преобразователем в том смысле, что он способен обеспечивать переменное постоянное напряжение любой полярности с положительным током. Однако преобразователь на рис. 1.2(c) является одноквадрантным преобразователем (положительные напряжение и ток). Преобразователи рис. 1.2 (b) и (c) создают гармоники как на стороне постоянного, так и на стороне переменного тока и имеют низкий коэффициент мощности для низких напряжений постоянного тока. Преобразователи на рис. 1.2 (d), (e) и (f) работают с коэффициентом основной мощности, равным единице.
Однако преобразователь на рис. 1.2(c) является одноквадрантным преобразователем (положительные напряжение и ток). Преобразователи рис. 1.2 (b) и (c) создают гармоники как на стороне постоянного, так и на стороне переменного тока и имеют низкий коэффициент мощности для низких напряжений постоянного тока. Преобразователи на рис. 1.2 (d), (e) и (f) работают с коэффициентом основной мощности, равным единице.
Выходное напряжение в преобразователе 1.2(d) изменяется путем приложения механической силы. Можно получить только несколько дискретных ступеней постоянного напряжения. В преобразователе рис. 1.2(д) выходное напряжение можно бесступенчато изменять, управляя коэффициентом заполнения полупроводниковых приборов прерывателя маломощными электрическими сигналами от блока управления. Преобразователь рис. 1.2(0) представляет собой управляемый выпрямитель, использующий самокоммутирующиеся устройства, такие как силовые транзисторы, ИСТ и ГТО. Это может быть одно- или двухквадрантный преобразователь в зависимости от схемы. При встречно-параллельном соединении преобразователи рис. 2 (b) и (f) могут обеспечивать работу в четырех квадрантах (переменное напряжение и ток любой полярности). В преобразователе переменного тока в постоянный, показанном на рис. блок управления (усилитель) более высокого уровня мощности, чем блоки управления преобразователей рис. 1.2 (b), (c), (e) и (0). Он может работать во всех четырех квадрантах. Из-за двух вращающихся машин, он имеет ряд недостатков: громоздкий, тяжелый, шумный, менее производительный, медленно реагирующий, дорогой и требует специального фундамента Недостатки, связанные с коммутатором и щетками файлового генератора постоянного тока (рис. 1.2(ж)) устранены в преобразователе рис. 1.2(h), однако этот преобразователь может работать только в одном квадранте. в некоторых очень старых устройствах также может использоваться преобразователь переменного тока в постоянный, показанный на рис. 1.2(i) и (j) с использованием магнитного усилителя и амплидина соответственно. Магнитные усилители и амплидины управляются маломощными сигналами постоянного тока.
При встречно-параллельном соединении преобразователи рис. 2 (b) и (f) могут обеспечивать работу в четырех квадрантах (переменное напряжение и ток любой полярности). В преобразователе переменного тока в постоянный, показанном на рис. блок управления (усилитель) более высокого уровня мощности, чем блоки управления преобразователей рис. 1.2 (b), (c), (e) и (0). Он может работать во всех четырех квадрантах. Из-за двух вращающихся машин, он имеет ряд недостатков: громоздкий, тяжелый, шумный, менее производительный, медленно реагирующий, дорогой и требует специального фундамента Недостатки, связанные с коммутатором и щетками файлового генератора постоянного тока (рис. 1.2(ж)) устранены в преобразователе рис. 1.2(h), однако этот преобразователь может работать только в одном квадранте. в некоторых очень старых устройствах также может использоваться преобразователь переменного тока в постоянный, показанный на рис. 1.2(i) и (j) с использованием магнитного усилителя и амплидина соответственно. Магнитные усилители и амплидины управляются маломощными сигналами постоянного тока.
2. Регуляторы напряжения переменного тока или регуляторы переменного тока:
регуляторы напряжения переменного тока (рис. 1.3) используются для получения переменного напряжения той же частоты от источника постоянного переменного напряжения. Контроллер напряжения на рис. 1.3 (а) обеспечивает фиксированное (меньшее) напряжение питания переменного тока. Автотрансформаторы, способные выдавать переменное выходное напряжение, не используются из-за скользящих контактов. Переменное напряжение переменного тока с несколькими дискретными шагами получается от контроллера рис. 1.3 (b). Управление осуществляется механической силой. Выходное напряжение и ток источника являются синусоидальными. В преобразователе, показанном на рис. 1.3(с), используется тиристорный регулятор напряжения. Бесступенчатое регулирование выходного напряжения можно получить, управляя углом открытия тиристоров преобразователя маломощными сигналами от блока управления. Выходное напряжение и ток источника имеют гармоники, а коэффициент мощности невелик при низких выходных напряжениях. Немногие старые приводы могут использовать магнитный усилитель для получения переменного напряжения постоянного тока. Из-за высокой стоимости, веса и объема, а также низкой эффективности они были заменены тиристорными регуляторами напряжения почти во всех приложениях.
Немногие старые приводы могут использовать магнитный усилитель для получения переменного напряжения постоянного тока. Из-за высокой стоимости, веса и объема, а также низкой эффективности они были заменены тиристорными регуляторами напряжения почти во всех приложениях.
3. Преобразователи или преобразователи постоянного тока (рис. 1.4):
Они используются для получения переменного напряжения постоянного тока от постоянного напряжения постоянного тока и разработаны с использованием полупроводниковых устройств, таких как силовые транзисторы, IGBT, GTO, мощные МОП-транзисторы и тиристоры. Выходное напряжение можно бесступенчато изменять, регулируя скважность устройства маломощными сигналами от блока управления.
4. Инверторы:
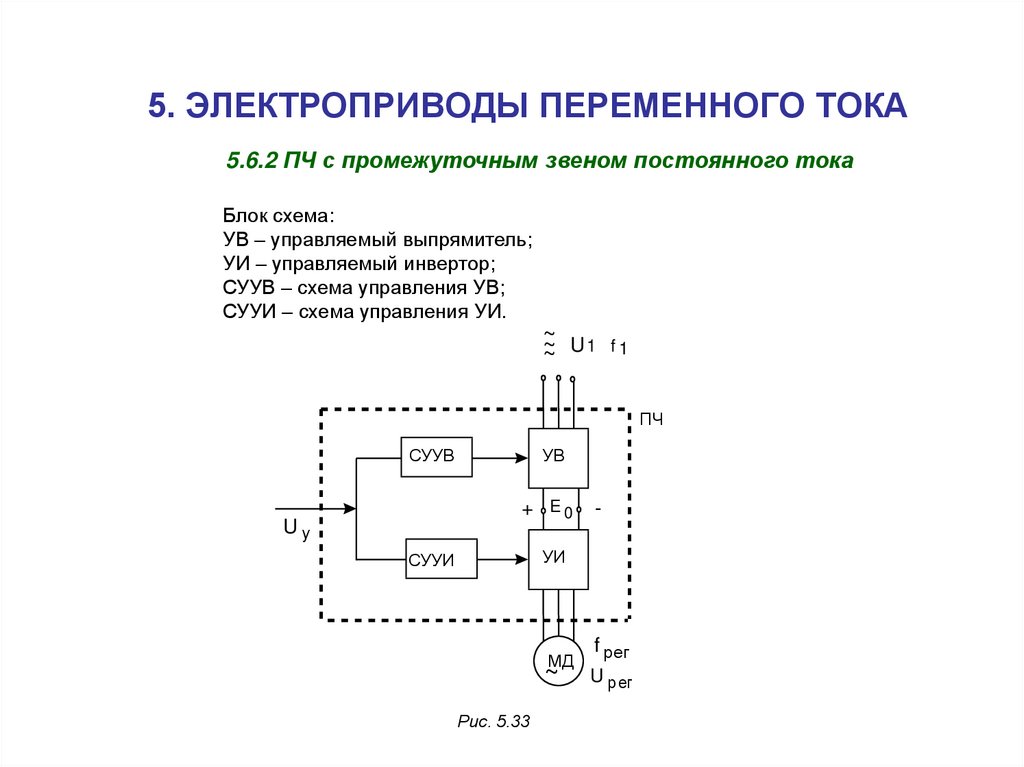
Инверторы используются для получения переменной частоты от источника постоянного тока. Ступенчатые инверторы на рис. 1.5 (а) могут быть спроектированы так, чтобы они вели себя как источник напряжения или источник тока.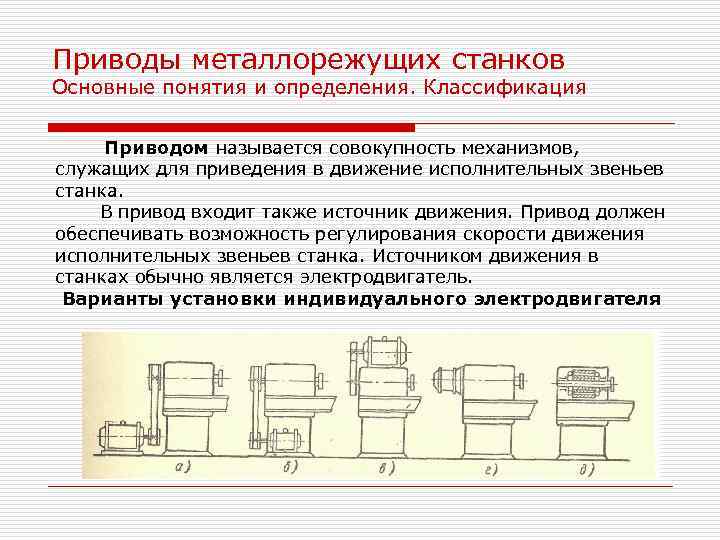 Соответственно, они известны как инверторы источников напряжения или источников тока. Для управления двигателем переменного тока необходимо также контролировать напряжение/ток вместе с частотой. Изменение выходного напряжения/тока может быть достигнуто за счет изменения входного постоянного напряжения. Это достигается либо установкой прерывателя между источником постоянного тока с фиксированным напряжением и инвертором, либо инвертор может питаться от преобразователя переменного тока в постоянный из тех, что показаны на рис. 1.2(b), (c) или (f). Выходное напряжение и ток имеют ступенчатую форму волны, следовательно, они имеют значительное количество гармоник. Переменная частота и переменное напряжение переменного тока получаются непосредственно из постоянного напряжения постоянного тока, когда инвертор управляется широтно-импульсной модуляцией (ШИМ) (рис. 1.5 (б)). ШИМ-управление также уменьшает гармоники выходного напряжения. Инверторы построены с использованием полупроводниковых устройств, таких как тиристоры, силовые транзисторы, IGBT, GTO и силовые МОП-транзисторы.
Соответственно, они известны как инверторы источников напряжения или источников тока. Для управления двигателем переменного тока необходимо также контролировать напряжение/ток вместе с частотой. Изменение выходного напряжения/тока может быть достигнуто за счет изменения входного постоянного напряжения. Это достигается либо установкой прерывателя между источником постоянного тока с фиксированным напряжением и инвертором, либо инвертор может питаться от преобразователя переменного тока в постоянный из тех, что показаны на рис. 1.2(b), (c) или (f). Выходное напряжение и ток имеют ступенчатую форму волны, следовательно, они имеют значительное количество гармоник. Переменная частота и переменное напряжение переменного тока получаются непосредственно из постоянного напряжения постоянного тока, когда инвертор управляется широтно-импульсной модуляцией (ШИМ) (рис. 1.5 (б)). ШИМ-управление также уменьшает гармоники выходного напряжения. Инверторы построены с использованием полупроводниковых устройств, таких как тиристоры, силовые транзисторы, IGBT, GTO и силовые МОП-транзисторы. Они управляются управляющими импульсами, полученными от блока управления малой мощности. В прошлом питание переменной частоты получали от преобразователя частоты, использующего вращающуюся машину. Такие схемы устарели из-за многочисленных недостатков.
Они управляются управляющими импульсами, полученными от блока управления малой мощности. В прошлом питание переменной частоты получали от преобразователя частоты, использующего вращающуюся машину. Такие схемы устарели из-за многочисленных недостатков.
5.Циклопреобразователь
Циклопреобразователь (рис. 1.6) преобразует переменный ток постоянного напряжения и частоты в переменный ток переменного напряжения и переменной частоты. Они построены с использованием тиристоров и управляются сигналами запуска, поступающими от блока управления малой мощности. Выходная частота ограничена 40 % частоты сети, чтобы удерживать гармоники выходного напряжения и тока источника в допустимых пределах.
(b) Переменный импеданс
Переменные резисторы обычно используются для управления недорогими приводами постоянного и переменного тока, а также необходимы для динамического торможения приводов. Переменные резисторы могут иметь две (полную и нулевую) и более ступеней – и могут управляться вручную или автоматически с помощью контакторов. Бесступенчатое изменение сопротивления можно получить с помощью полупроводникового переключателя параллельно с постоянным сопротивлением; изменение коэффициента заполнения переключателя дает бесступенчатое изменение действующего значения сопротивления. В приложениях с высокой мощностью используются жидкие реостаты, известные как регуляторы скольжения, для получения бесступенчатого изменения сопротивления.
Бесступенчатое изменение сопротивления можно получить с помощью полупроводникового переключателя параллельно с постоянным сопротивлением; изменение коэффициента заполнения переключателя дает бесступенчатое изменение действующего значения сопротивления. В приложениях с высокой мощностью используются жидкие реостаты, известные как регуляторы скольжения, для получения бесступенчатого изменения сопротивления.
Катушки индуктивности, обычно двухступенчатые (полная и нулевая), используются для ограничения пускового тока двигателей переменного тока. В старых приводах также могут использоваться реакторы насыщения для управления асинхронными двигателями. В реакторах насыщения реактивное сопротивление регулируется бесступенчато путем управления постоянным током обмотки управления.
(c) Цепи переключения
Операции переключения необходимы для достижения любого из следующего: (i) для изменения соединений двигателя для изменения его рабочего квадранта, (ii) для изменения параметров цепи двигателя дискретными шагами для автоматического управление пуском и торможением, (iii) для работы двигателей и приводов в соответствии с заданной последовательностью, (iv) для обеспечения блокировки для предотвращения неправильной работы и (v) для отключения двигателя при возникновении ненормальных условий работы.
Коммутационные операции в силовой цепи двигателя осуществляются электромагнитными реле большой мощности, называемыми контакторами. Недавно были предприняты попытки использовать тиристорные ключи. Тиристорные переключатели имеют недостатки, заключающиеся в том, что они не могут обеспечить идеальную изоляцию между цепью источника и двигателя. Следовательно, контакторы продолжают широко использоваться. Операция переключения в зависимости от конкретного положения нагрузки осуществляется с помощью концевых выключателей.
В прошлом операции последовательности и блокировки выполнялись с помощью электромагнитных реле малой мощности. Твердотельные реле заменили их почти во всех приложениях. Для реализации сложных операций последовательности и блокировки используются программируемые логические контроллеры (ПЛК).
Источники
В Индии в большинстве мест легко доступны однофазные и трехфазные источники переменного тока 50 Гц. Приводы очень малой мощности обычно питаются от однофазного источника. Остальные приводы питаются от 3-х фазного источника; за исключением тяговых приводов, где даже при очень высоких уровнях мощности из соображений экономии используется однофазное питание. Большинство приводов питаются от источника переменного тока либо напрямую, либо через преобразователь. При прямом питании от сети переменного тока частотой 50 Гц максимальная скорость асинхронных и синхронных двигателей ограничена 3000 об/мин. Для более высоких скоростей переход на более высокочастотный источник питания становится обязательным. Двигатели малой и средней мощности (десятки киловатт) обычно питаются от сети 400 В; для высоких номиналов двигатели могут быть рассчитаны на 3,3 кВ, 6,6 кВ, 11 кВ и выше.
Остальные приводы питаются от 3-х фазного источника; за исключением тяговых приводов, где даже при очень высоких уровнях мощности из соображений экономии используется однофазное питание. Большинство приводов питаются от источника переменного тока либо напрямую, либо через преобразователь. При прямом питании от сети переменного тока частотой 50 Гц максимальная скорость асинхронных и синхронных двигателей ограничена 3000 об/мин. Для более высоких скоростей переход на более высокочастотный источник питания становится обязательным. Двигатели малой и средней мощности (десятки киловатт) обычно питаются от сети 400 В; для высоких номиналов двигатели могут быть рассчитаны на 3,3 кВ, 6,6 кВ, 11 кВ и выше.
В случае применения в авиации и космонавтике питание переменного тока частотой 400 Гц обычно используется для достижения высокого отношения мощности к весу двигателей.
При магистральной тяге предпочтительнее источник высокого напряжения из соображений экономии. В Индии используется электроснабжение 25 кВ, 50 Гц. При подземной тяге основными расходами являются стоимость туннеля, которую следует минимизировать, сохранив его поперечное сечение, достаточное для проезда поезда. Следовательно, зазор между проводом под напряжением и землей также должен быть минимальным. Ввиду этого в подземных тяговых системах используется низковольтный (от 500 до 750 В) источник постоянного тока. В Западной Индии (от Бомбея до Игатпури) 1500 В постоянного тока используется для основной линии и пригородной тяги, что неэкономично, и поэтому будущие установки не будут его использовать.
При подземной тяге основными расходами являются стоимость туннеля, которую следует минимизировать, сохранив его поперечное сечение, достаточное для проезда поезда. Следовательно, зазор между проводом под напряжением и землей также должен быть минимальным. Ввиду этого в подземных тяговых системах используется низковольтный (от 500 до 750 В) источник постоянного тока. В Западной Индии (от Бомбея до Игатпури) 1500 В постоянного тока используется для основной линии и пригородной тяги, что неэкономично, и поэтому будущие установки не будут его использовать.
Некоторые приводы питаются от батареи, напр. автопогрузчики и молоковозы. В зависимости от размера напряжение батареи может иметь типичные значения 6 мкВ, 12 В, 24 В, 48 В и 110 В постоянного тока. Другим примером приводов, питаемых от источника постоянного тока низкого напряжения, являются приводы на солнечных батареях, используемые в космических и водяных насосах. Эти приводы, несмотря на то, что в настоящее время они очень дороги, имеют большое будущее для применения в сельском водоснабжении и маломощном транспорте.
Хотя выбор двигателя зависит от типа питания, существует множество других факторов, которые еще более важны. Следовательно, двигатель постоянного тока может быть предпочтительнее двигателя переменного тока, даже если имеется источник переменного тока, а двигатели переменного тока могут быть предпочтительнее двигателя постоянного тока, даже если источник питания постоянного тока.
Блок управления
Элементы управления модулятором мощности находятся в блоке управления. Характер блока управления для конкретного привода зависит от используемого модулятора мощности. Из-за их большого количества здесь обсуждаются только два случая.
При использовании полупроводниковых преобразователей блок управления будет состоять из схем запуска, в которых используются линейные и цифровые интегральные схемы и транзисторы, и микропроцессора, когда требуется сложное управление. Когда управление коммутационными цепями требуется для какой-либо из целей, описанных в гл. 1.3.2(c), функция блока управления будет заключаться в обеспечении последовательности и блокировки. Как уже говорилось, используются твердотельные реле, а при сложном управлении могут использоваться программируемые логические контроллеры (ПЛК).
1.3.2(c), функция блока управления будет заключаться в обеспечении последовательности и блокировки. Как уже говорилось, используются твердотельные реле, а при сложном управлении могут использоваться программируемые логические контроллеры (ПЛК).
Блок-схема электропривода, типы и применение
Биполярный транзистор – по умолчанию
Включите JavaScript
Биполярный транзистор – определение, конструкция, типы и применение и приложения. Б.С. Якоби в 1838 году разработал первый электрический привод для приведения в движение лодки с использованием батареи постоянного тока в двигателе постоянного тока. Скорость асинхронного двигателя можно точно контролировать, одновременно изменяя напряжение и частоту. Привод, используемый для управления скоростью асинхронного двигателя, называется приводом VF.
Таким образом, электропривод очень важен для управления скоростью двигателя для оптимизации процесса, а также для экономии энергии.
Что такое электропривод?
Когда мы думаем об управлении скоростью двигателя, первое название, которое приходит нам на ум, это электропривод. Электропривод – это система, которая регулирует скорость вращения электрической машины. Привод имеет первичный двигатель, такой как бензиновый двигатель, дизельный двигатель, паровая турбина, гидравлический двигатель, электродвигатель, газовая или паровая турбина. Первичный двигатель подает энергию на привод для управления движением.
Электропривод управляет скоростью двигателя. Электропривод может быть приводом VF или приводом постоянного тока, в зависимости от приложений.
Блок-схема электропривода
Блок-схема электропривода показана ниже.
Электропривод имеет источник, модулятор мощности, двигатель, нагрузку, датчик, блок управления и ввод команд.
Источник питания
Источник питания обеспечивает систему необходимой энергией. Преобразователь преобразует источник энергии в переменное напряжение и частоту в соответствии с принципами управления двигателем.
Преобразователь преобразует источник энергии в переменное напряжение и частоту в соответствии с принципами управления двигателем.
Модулятор мощности
Модулятор мощности управляет выходным напряжением и частотой для управления скоростью двигателя. Модулятор мощности выдает напряжение и частоту на двигатель, который управляет скоростью двигателя. Модулятор мощности обеспечивает такие функции, как повышение пускового момента, пуск с разгоном и остановка с замедлением и т. д.
Потребляемый ток от источника питания может превышать его, иначе это может вызвать падение напряжения. Поэтому модулятор мощности ограничивает ток двигателя, а также источник.
Модулятор мощности может изменять энергию в зависимости от потребности двигателя. Например, инвертор преобразует постоянный ток в переменный для работы асинхронного двигателя. Кроме того, модулятор может управлять двигателем и в режиме торможения. Следовательно, модулятор мощности управляет напряжением источника и током двигателя.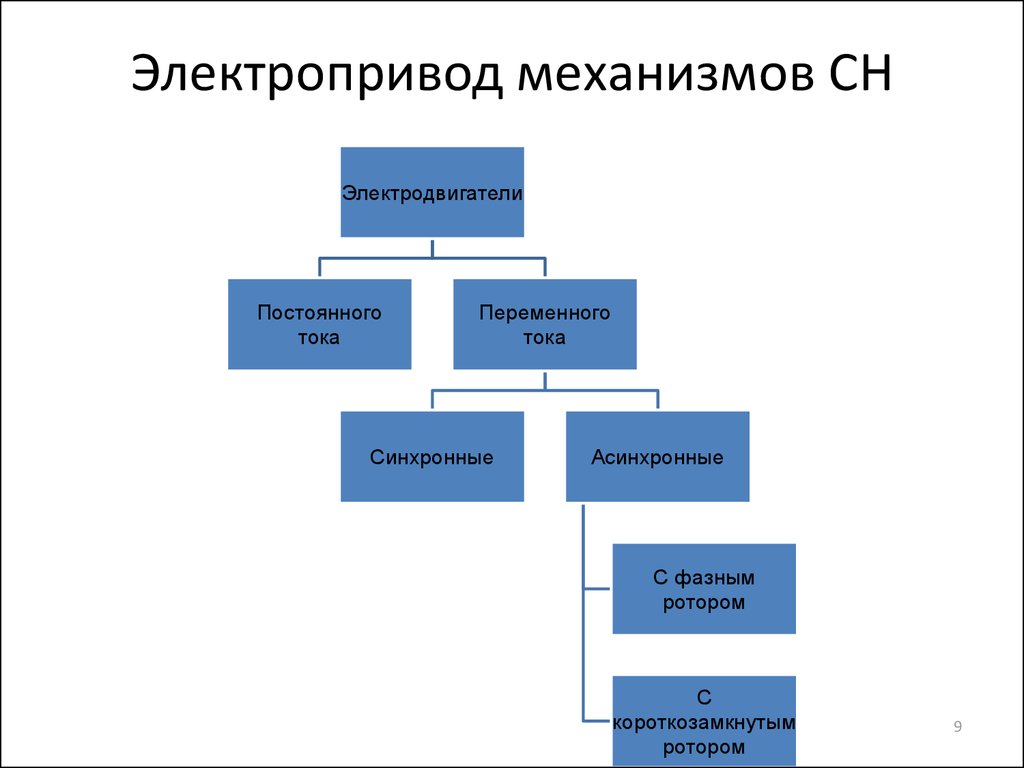 Если источником является постоянный ток и нам нужно управлять асинхронным двигателем, то модулятор мощности преобразует постоянный ток в переменный.
Если источником является постоянный ток и нам нужно управлять асинхронным двигателем, то модулятор мощности преобразует постоянный ток в переменный.
Загрузка
Нагрузкой, подключенной к электроприводу, может быть инвертор, преобразователь, двигатель или любая другая механическая нагрузка, такая как насос, вентилятор или станки. Нагрузочные характеристики могут иметь постоянный и переменный крутящий момент.
Блок управления
Блок управления управляет модулятором мощности, который может работать на уровнях мощности и малых напряжениях. Блок управления получает входные команды и обратную связь от двигателя и выдает их на модулятор мощности. Кроме того, модулятор мощности управляет скоростью двигателя.
Блок датчиков
Блок датчиков измеряет скорость и ток двигателя и передает сигнал в блок управления системы привода. Чувствительный блок образует замкнутую систему для точного управления скоростью двигателя. Примерами датчиков являются датчики скорости и датчики тока.
Примерами датчиков являются датчики скорости и датчики тока.
Двигатель
Электродвигатель приводит в движение механическую нагрузку. Двигатель может быть постоянного или переменного тока. Контроллер двигателя выбирается в соответствии с типом двигателя.
Обычно используются следующие двигатели.
- Двигатели постоянного тока – последовательные, шунтирующие/параллельные двигатели постоянного тока, составные двигатели и двигатели постоянного тока с постоянными магнитами.
- Асинхронные двигатели – асинхронный двигатель с короткозамкнутым ротором и контактным кольцом
- Бесщеточные двигатели постоянного тока или бесщеточные двигатели постоянного тока
- Шаговые двигатели.
Типы электрических приводов
Приводы подразделяются на три типа: групповой привод, индивидуальный привод и многодвигательный привод. Кроме того, мы можем классифицировать электрические приводы следующим образом.
На основе поставки
- Приводы переменного тока – Привод переменного тока регулирует скорость асинхронного двигателя путем изменения частоты электропитания двигателя. Привод переменного тока также известен как привод с переменной частотой (VFD) или привод с регулируемой скоростью (VSD).
- Приводы постоянного тока – Приводы постоянного тока регулируют скорость двигателей постоянного тока путем изменения напряжения на якоре двигателя. Существует два типа приводов постоянного тока: аналоговые приводы постоянного тока и цифровые приводы постоянного тока.
На основе скорости
- Приводы с постоянной скоростью — В станках требуется постоянная скорость. Для достижения этой функции предпочтителен асинхронный двигатель с короткозамкнутым ротором с ручным управлением.
- Приводы с регулируемой скоростью — При управлении некоторыми процессами желательно иметь управление скоростью для оптимизации процесса и экономии энергии.
 Для этих приложений используются приводы с регулируемой скоростью.
Для этих приложений используются приводы с регулируемой скоростью.
На основе параметра управления
- Приводы с постоянным крутящим моментом – Для некоторых нагрузок требуется постоянный крутящий момент во всем диапазоне скоростей. Привод подает на нагрузку постоянный крутящий момент. В частотно-регулируемом приводе постоянный крутящий момент поддерживается за счет поддержания постоянного отношения напряжение/Гц. Примерами являются винтовые компрессоры и ленточные конвейеры.
- Приводы с переменным крутящим моментом – Приводы с переменным крутящим моментом обеспечивают переменный крутящий момент в соответствии с требованием крутящего момента нагрузки. Преобразователь частоты можно запрограммировать для работы в режиме постоянного или переменного крутящего момента.
- Приводы с постоянной мощностью — Когда скорость привода превышает его базовую скорость, он работает в режиме постоянной мощности.
 Увеличение скорости осуществляется за счет метода ослабления потока. Следовательно, крутящий момент уменьшается с увеличением скорости. Таким образом, привод работает в режиме постоянной мощности.
Увеличение скорости осуществляется за счет метода ослабления потока. Следовательно, крутящий момент уменьшается с увеличением скорости. Таким образом, привод работает в режиме постоянной мощности. - Приводы с векторным управлением — В ЧРП векторное управление обеспечивает более точное управление скоростью, чем скалярное управление. При векторном управлении скорость и крутящий момент регулируются одновременно для достижения наилучших характеристик привода. Этот метод широко используется в асинхронных двигателях и синхронных двигателях переменного тока.
На основе количества двигателей
- Приводы с одним двигателем – Имеется один двигатель для конкретного применения. Пример – токарный станок
- Многодвигательные приводы – Существуют отдельные двигатели для приведения в движение различных частей станка. Пример – Кран EOT
- Групповые приводы – Один двигатель приводит в движение две или несколько машин.
 Остальные машины соединены с валом двигателя через ремни и шкивы. Сцепление осуществляется через муфту.
Остальные машины соединены с валом двигателя через ремни и шкивы. Сцепление осуществляется через муфту.
Преимущества электрических приводов
Ниже перечислены преимущества использования электрических приводов.
- Электроприводы экологичны, так как не выделяют дыма, паров, золы и т. д. В результате электроприводы наиболее подходят для метрополитена.
- Электроприводы универсальны в своей работе — в электроприводах используются такие электронные устройства, как SCR, IGBT, MOSFET и микроконтроллеры, поэтому приводом легко управлять, а его производительность выше.
- Электроприводы могут управляться удаленно.
- Электроприводы занимают значительно меньше места, поскольку имеют компактные размеры.
- Электроприводы могут регулировать крутящий момент, скорость и мощность в широком диапазоне.
- Электроприводы мгновенно запускают двигатель, поскольку им не требуется время на прогрев.
- Электроприводы очень надежны.

- Электроприводы могут эксплуатироваться в различных условиях окружающей среды, таких как химические, горнодобывающие, взрывоопасные и радиоактивные среды.
- Электрические приводы, работающие от электроэнергии, имеют многочисленные преимущества перед другими источниками энергии.
- Электрическим приводам требуется меньше терминального пространства, поскольку они имеют высокую плановую скорость и большую пропускную способность.
- Электрические приводы являются наиболее экономичными, поскольку они требуют меньше обслуживания и меньше времени на техническое обслуживание.
Недостатки электропривода
Ниже приведены недостатки использования электроприводов.
- Они дорого стоят.
- Нельзя устанавливать при отсутствии источника электроэнергии
- Электроприводы создают гармоники и загрязняют электрическую сеть,
- Они производят электронные помехи.
- Электроприводы подходят только для электрифицированных путей.

