Что такое трехфазный синхронный двигатель. Как устроен синхронный двигатель. Как работает синхронный электродвигатель. Каковы основные характеристики синхронных двигателей. Чем отличается синхронный двигатель от асинхронного. Каковы преимущества и недостатки синхронных двигателей.
Принцип работы трехфазного синхронного двигателя
Трехфазный синхронный двигатель — это электрическая машина переменного тока, ротор которой вращается с частотой, равной частоте вращения магнитного поля статора. Рассмотрим основные принципы работы данного типа электродвигателей:
- Статор двигателя создает вращающееся магнитное поле за счет трехфазного переменного тока в обмотках
- Ротор представляет собой электромагнит, питаемый постоянным током
- Магнитные поля статора и ротора взаимодействуют, создавая вращающий момент
- Частота вращения ротора всегда равна частоте вращения магнитного поля статора
- При изменении нагрузки меняется только угол между осями полей статора и ротора
Таким образом, главная особенность синхронного двигателя — постоянная скорость вращения ротора, не зависящая от нагрузки на валу. Это определяет области применения таких двигателей.

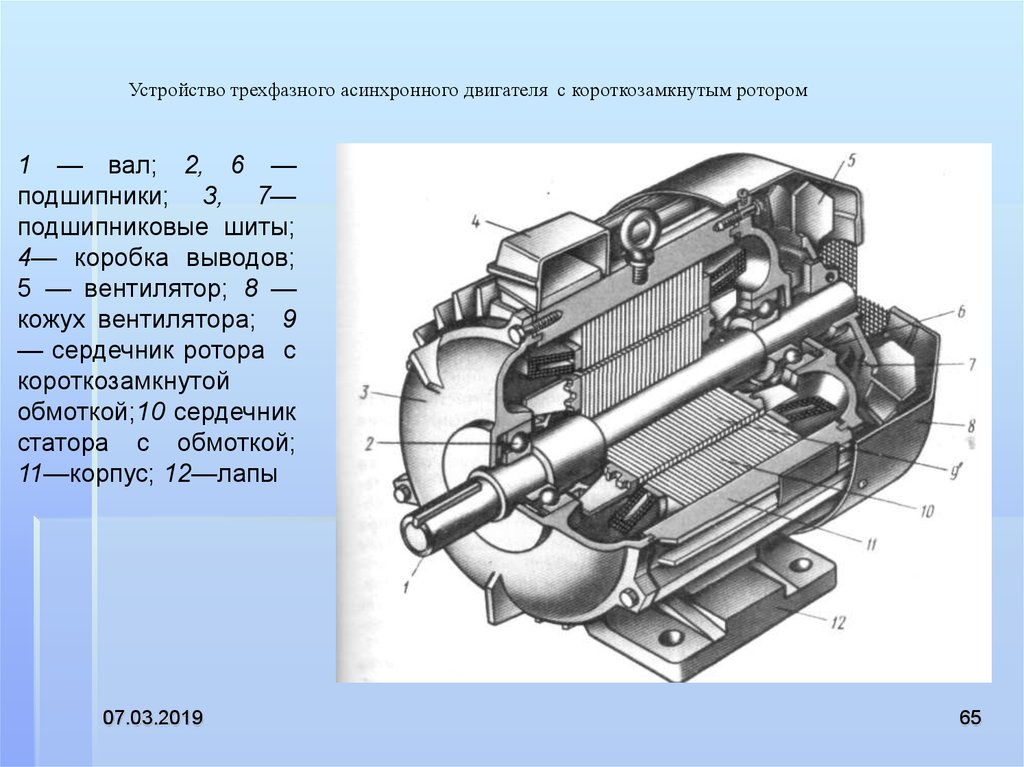
Конструкция синхронного электродвигателя
Основные элементы конструкции трехфазного синхронного двигателя:
- Статор с трехфазной обмоткой, создающей вращающееся магнитное поле
- Ротор с обмоткой возбуждения, питаемой постоянным током
- Контактные кольца для подвода постоянного тока к обмотке ротора
- Пусковая короткозамкнутая обмотка на роторе
- Подшипниковые щиты
- Вал для передачи вращающего момента
- Система охлаждения (вентилятор)
Статор и ротор разделены воздушным зазором. По конструкции ротора различают явнополюсные и неявнополюсные синхронные двигатели. Явнополюсные имеют выступающие полюса на роторе и применяются при низких скоростях вращения. Неявнополюсные используются в высокоскоростных двигателях.
Характеристики синхронных двигателей
Основные характеристики, описывающие работу трехфазных синхронных двигателей:
- Механическая характеристика — зависимость частоты вращения от момента на валу. У синхронного двигателя она представляет собой прямую линию.
- Угловая характеристика — зависимость электромагнитного момента от угла нагрузки. Она определяет перегрузочную способность двигателя.
- U-образные характеристики — зависимости тока статора от тока возбуждения при постоянной нагрузке. Позволяют оценить режимы работы по коэффициенту мощности.
- Рабочие характеристики — зависимости основных параметров (ток, КПД, коэффициент мощности и др.) от полезной мощности на валу.
Знание этих характеристик позволяет правильно выбрать и эксплуатировать синхронный двигатель в конкретных условиях применения.

Пуск синхронного двигателя
Процесс пуска синхронного двигателя имеет свои особенности:
- Пусковой момент двигателя при подаче питания на обмотку статора равен нулю
- Для создания начального вращения используется пусковая короткозамкнутая обмотка на роторе
- Двигатель запускается как асинхронный и разгоняется до подсинхронной скорости (95-98% от синхронной)
- Затем в обмотку ротора подается постоянный ток возбуждения
- Ротор втягивается в синхронизм под действием электромагнитных сил
Существуют и другие способы пуска — с помощью вспомогательного разгонного двигателя или частотного преобразователя. Выбор метода пуска зависит от мощности двигателя и условий эксплуатации.
Сравнение синхронных и асинхронных двигателей
Основные отличия синхронных двигателей от асинхронных:
| Параметр | Синхронный двигатель | Асинхронный двигатель |
|---|---|---|
| Скорость вращения | Постоянная, равна синхронной | Переменная, меньше синхронной |
| Конструкция ротора | Электромагнит с обмоткой возбуждения | Короткозамкнутая обмотка |
| Пусковые свойства | Сложный пуск | Простой прямой пуск |
| Регулирование скорости | Только изменением частоты питания | Различными способами |
| Коэффициент мощности | Регулируемый, может быть емкостным | Всегда <1, индуктивный характер |
Выбор типа двигателя зависит от конкретных требований применения — необходимости точного поддержания скорости, диапазона регулирования, условий пуска и других факторов.

Преимущества и недостатки синхронных двигателей
Рассмотрим основные достоинства и ограничения применения трехфазных синхронных двигателей:
Преимущества:
- Постоянная скорость вращения независимо от нагрузки
- Высокий КПД, особенно у двигателей большой мощности
- Возможность работы с опережающим коэффициентом мощности
- Устойчивость к колебаниям напряжения сети
- Хорошие регулировочные свойства по реактивной мощности
Недостатки:
- Сложность конструкции из-за наличия системы возбуждения
- Трудности при пуске, необходимость специальных пусковых устройств
- Возможность выпадения из синхронизма при перегрузках
- Высокая стоимость по сравнению с асинхронными двигателями
- Сложность регулирования скорости вращения
Несмотря на указанные недостатки, синхронные двигатели находят широкое применение в промышленности, особенно для привода механизмов большой мощности, не требующих регулирования скорости.
Области применения синхронных электродвигателей
Трехфазные синхронные двигатели используются в следующих областях:

- Привод мощных насосов и компрессоров в нефтегазовой отрасли
- Привод вентиляторов и дымососов на электростанциях
- Прокатные станы в металлургии
- Судовые гребные электрические установки
- Привод шаровых мельниц в горнодобывающей промышленности
- Синхронные компенсаторы для улучшения коэффициента мощности в электрических сетях
- Привод генераторов постоянного тока
Выбор синхронного двигателя обусловлен необходимостью точного поддержания скорости, высоким КПД при больших мощностях и возможностью работы с опережающим коэффициентом мощности.
Перспективы развития синхронных двигателей
Основные направления совершенствования трехфазных синхронных двигателей:
- Применение постоянных магнитов вместо электромагнитной системы возбуждения
- Использование современных магнитных материалов для снижения потерь
- Разработка эффективных систем управления для улучшения динамических характеристик
- Создание высокоскоростных синхронных двигателей для специальных применений
- Интеграция синхронных двигателей в системы рекуперативного торможения
Развитие технологий позволяет расширить области применения синхронных двигателей и повысить их энергоэффективность. Это делает их перспективным типом электрических машин для промышленных приводов большой мощности.

Синхронный электродвигатель с обмоткой возбуждения
Дмитрий Левкин
- Конструкция
- Принцип работы
- Синхронная скорость
- Прямой запуск
- Выход из синхронизма
- Синхронный компенсатор
Синхронный электродвигатель с обмоткой возбуждения, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть. Статор обычно имеет стандартную трехфазную обмотку, а ротор выполнен с обмоткой возбуждения. Обмотка возбуждения соединена с контактными кольцами к которым через щетки подходит питание.
Синхронный электродвигатель с обмоткой возбуждения (щетки не показаны)
Постоянная скорость вращения синхронного электродвигателя достигается за счет взаимодействия между постоянным и вращающимся магнитным полем. Ротор синхронного электродвигателя создает постоянное магнитное поле, а статор – вращающееся магнитное поле.
Работа синхронного электродвигателя основана на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора
Статор: вращающееся магнитное поле
На обмотки катушек статора подается трехфазное переменное напряжение. В результате создается вращающееся магнитное поле, которое вращается со скоростью пропорциональной частоте питающего напряжения. Подробнее о том, как посредством трехфазного напряжения питания образуется вращающееся магнитное поле можно прочитать в статье «Трехфазный асинхронный электродвигатель».
Взаимодействие между вращающимся (у статора) и постоянным (у ротора) магнитными полями
Ротор: постоянное магнитное поле
Обмотка ротора возбуждается источником постоянного тока через контактные кольца. Магнитное поле создаваемое вокруг ротора возбуждаемое постоянным током показано ниже. Очевидно, что ротор ведет себя как постоянный магнит, так как имеет такое же магнитное поле (в качестве альтернативы можно представить, что ротор сделан из постоянных магнитов).
Магнитные поля ротора и статора сцепленные друг с другом
Скорость с которой вращается магнитное поле может быть вычислена по следующему уравнению:
,
- где N s – частота вращения магнитного поля, об/мин,
- f – частота тока статора, Гц,
- p – количество пар полюсов.
Это значит, что скорость синхронного электродвигателя может очень точно контролироваться изменением частоты питающего тока. Таким образом эти электродвигатели подходят для высокоточных приложений.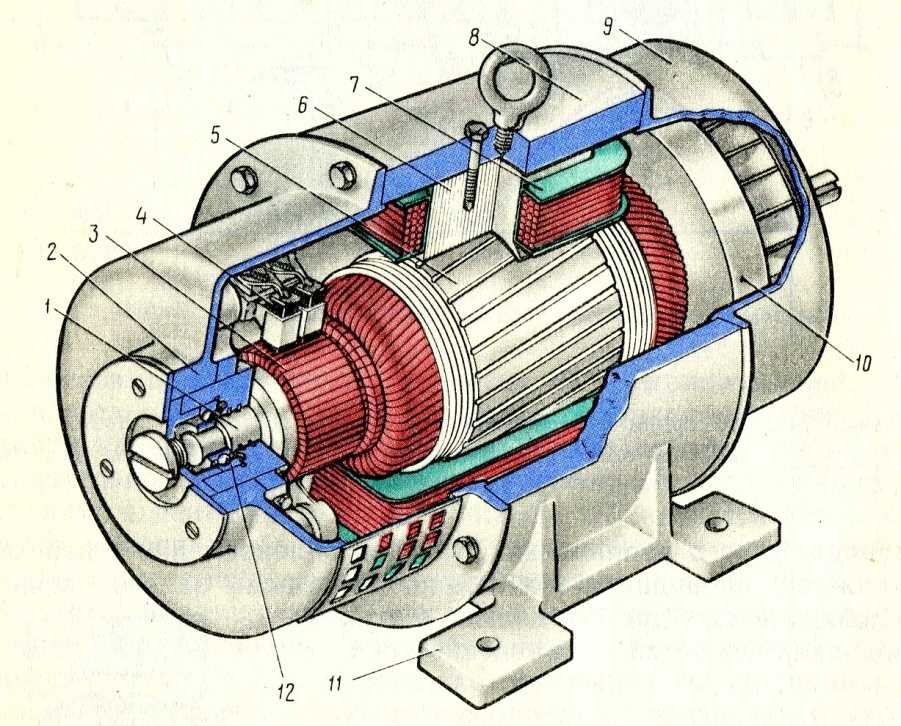
Почему синхронные электродвигатели не запускаются от электрической сети?
Если ротор не имеет начального вращения, ситуация отличается от описанной выше. Северный полюс магнитного поля ротора будет притягиваться к южному полюсу вращающегося магнитного поля, и начнет двигаться в том же направлении. Но так как ротор имеет определенный момент инерции, его стартовая скорость будет очень низкой. За это время южный полюс вращающегося магнитного поля будет замещен северным полюсом. Таким образом появятся отталкивающие силы. В результате чего ротор начнет вращаться в обратную сторону. Таким образом ротор не сможет запуститься.
Демпферная обмотка — прямой запуск синхронного двигателя от электрической сети
Чтобы реализовать самозапуск синхронного электродвигателя без системы управления между наконечниками ротора размещается «беличья клетка», которая также называется демпферной обмоткой. При запуске электродвигателя катушки ротора не возбуждаются. Под действием вращающегося магнитного поля, индуцируется ток в витках «беличьей клетки» и ротор начинает вращаться подобно тому, как запускаются асинхронные двигатели.
Когда ротор достигает своей максимальной скорости, подается питание на обмотку возбуждения ротора. В результате, как говорилось ранее, полюса ротора сцепляются с полюсами вращающегося магнитного поля и ротор начинает вращаться с синхронной скоростью. При вращении ротора с синхронной скоростью, относительное движение между белечьей клеткой и вращающимся магнитным полем равно нулю. Это значит, что отсутствует ток в короткозамкнутых витках, а следовательно «беличья клетка» не оказывает воздействия на синхронную работу электродвигателя.
Синхронные электродвигатели имеют постоянную скорость независящую от нагрузки (при условии что нагрузка не превышает макимально допустимую). Если момент нагрузки больше, чем момент создаваемый самим электродвигателем, то он выйдет из синхронизма и остановиться. Низкое напряжение питания и низкое напряжение возбуждения также могут быть причинами выхода двигателя из синхронизма.
Синхронные электродвигатели могут также использоваться для улучшения коэффициента мощности системы. Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
Когда единственной целью использования синхронных электродвигателей является улучшение коэффициента мощности их называют синхронными компенсаторами. В таком случае вал электродвигателя не соединяется с механической нагрузкой и вращается свободно.
Трехфазный синхронный двигатель с постоянными магнитами YGT | Производителя
серии YGT
Трехфазный синхронный двигатель с постоянными магнитами серии YGT является вентильным двигателем, изготовленным с применением редкоземельных элементов и обеспечивающим плавную работу без резистивной потери роторов, что снижает общие потери на 20%-30% и повышает эффективность на 3%-4%.
Вентильный двигатель может быть использован для замены универсального асинхронного двигателя и синхронного двигателя. Также он способен работать в различных рабочих условиях, в особенности, в условиях, при которых происходит периодическое изменение нагрузки, например, в насосных установках для добычи нефти. Данный электродвигатель имеет более высокий уровень энергосбережения (10% до 30%), чем асинхронные двигатели.
Характеристики
1. Высокий пусковой вращающий момент, большая перегрузочная способность
Наш трехфазный синхронный двигатель с постоянными магнитами имеет более высокий пусковой вращающий момент, большую перегрузочную способность и пониженную установленную мощность. Его вращающий момент и перегрузочная способность в среднем в один два раза, а иногда и в три раза, выше, чем у асинхронных двигателей. Коэффициент между максимальным пусковым вращающим моментом и номинальным вращающим моментом составляет 3.25. Также данный трехфазный синхронный двигатель отличается плавным запуском работы;
2. Высокая рабочая эффективность
Отсутствуют потери за счет скольжения во время работы двигателя. Магнитное поле сформировано с помощью постоянных магнитов, поэтому отсутствует необходимость в индуктивном намагничивающем токе статора. Асинхронные двигатели не обладают данным преимуществом. Таким образом, рабочая эффективность синхронного двигателя с постоянными магнитами обычно на 3%-4% выше, чем у асинхронного двигателя;
3. Высокий коэффициент мощности
Высокий коэффициент мощности
Постоянные магниты используются в качестве источника возбуждения. Коэффициент мощности асинхронного двигателя с постоянными магнитами может достигать 0.98 в процессе работы при полной нагрузке. Когда коэффициент нагрузки превышает 50%, коэффициент мощности значительно увеличивается и даже может превысить номинальную мощность. Таким образом, нет необходимости в конденсаторах компенсации, что сокращает расходы.
4. Уникальный дизайн, долгий срок службы
Роторная структура двигателя, изготовленная с применением редкоземельных элементов, уникальна: охлаждающие циркуляционные каналы понижают повышающуюся температуру роторов и поддерживают требуемую рабочую температуру постоянных магнитов, стабилизируя магнитное поле и увеличивая срок службы магнитов.
Возможна замена постоянных магнитов, встроенных в синхронный двигатель. Поэтому если магнетизм ослаблен или полностью утерян вследствие сгоревшего двигателя, можно легко его починить или заменить, что сокращает расходы пользователя.
5. Высокая совместимость, легкое обслуживание
Синхронный двигатель, изготовленный с применением редкоземельных элементов, оснащен тем же каркасом, что и двигатели серии Y и Y2. Его внешний размер и установочный размер такие же, что и у двигателей серии Y и Y2. Учитывая данный факт, синхронный двигатель YGT, двигатель Y и двигатель Y2 совместимы друг с другом и имеют похожие требования к техобслуживанию. Таким образом, можно легко заменить асинхронный двигатель двигателем YGT.
Электродвигатель данной серии, произведенный нашей фабрикой, имеет номинальную мощность от 5.5кВт до 45кВт. Входное напряжение составляет 380В, 660В, 1140В переменного тока с частотой 50Гц.
Трехфазный синхронный двигатель с постоянными магнитами серии YGT
| Показатели работы | |||||||||||||
| Серия | Тип модели | Номинальное напряжение В | Номинальная мощность кВт | Номинальный ток A | КПД% | Коэффициент мощности косинусφ | Шум Дб(A) | Крутящий момент заторможенного ротора Номинальный крутящий момент | Ток заторможенного ротора Номинальный ток IST IN | Мощность заменяемого асинхронного двигателякВт | |||
| Синхронная скорость 1500об/мин | |||||||||||||
| YGT | 132S-4 | 380/660/1140 | 5.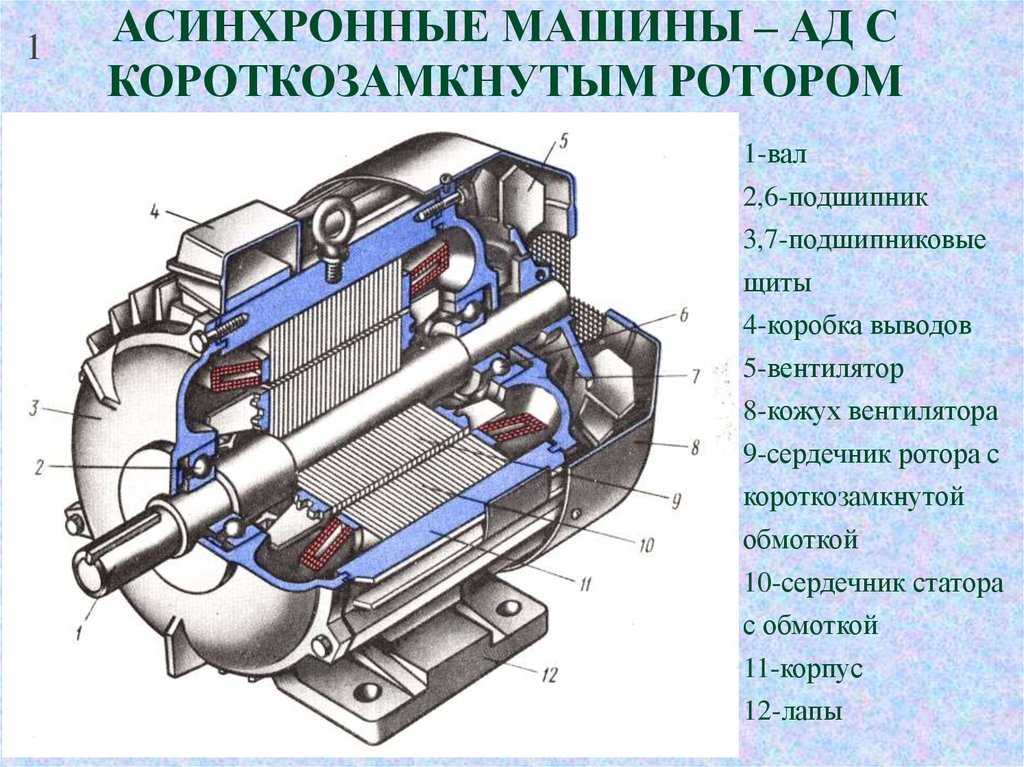 5 5 | 9.2/5.3/3.1 | 92.1 | 0.98 | 75 | 2.8 | 9.5 | 7.5~ 11 | |||
| YGT | 132M-4 | 380/660/1140 | 7.5 | 12.5/7.2/4.2 | 92.2 | 0.98 | 75 | 2.8 | 9.5 | 11~15 | |||
| YGT | 160M-4 | 380/660/1140 | 11 | 18/10.4/6.0 | 93.1 | 0.98 | 75 | 2.8 | 9.5 | 15~18.5 | |||
| YGT | 160L-4 | 380/660/1140 | 15 | 25/14.4/8.3 | 92.4 | 0.98 | 78 | 2.8 | 9.5 | 18.5~22 | |||
| YGT | 180M-4 | 380/660/1140 | 18.5 | 31/17.9/10.3 | 93.0 | 0.98 | 82 | 2.8 | 9.5 | 22~30 | |||
| YGT | 180L-4 | 380/660/1140 | 22 | 36/21/12 | 93.6 | 0. 98 98 | 82 | 2.8 | 9.5 | 30~37 | |||
| YGT | 200L-4 | 380/660/1140 | 30 | 49/28/16 | 93.9 | 0.98 | 82 | 2.8 | 9.5 | 37~45 | |||
| YGT | 225S-4 | 380/660/1140 | 37 | 62/36/21 | 94.5 | 0.98 | 83 | 2.8 | 9.5 | 45~55 | |||
| YGT | 225M-4 | 380/660/1140 | 45 | 73/42/24 | 95.1 | 0.98 | 86 | 2.8 | 9.5 | 55~75 | |||
| YGT | 250M-4 | 380/660/1140 | 55 | 90/52/30 | 95.0 | 0.98 | 86 | 2.8 | 9.5 | 75~90 | |||
| Синхронная скорость 1000об/мин | |||||||||||||
| YGT | 132S-6 | 380/660/1140 | 3 | 5/2.9/1.7 | 90.3 | 0.98 | 73 | 2. 8 8 | 9.5 | 4~5.5 | |||
| YGT | 132M1-6 | 380/660/1140 | 4 | 6.8/3.9/2.3 | 91.0 | 0.98 | 73 | 2.8 | 9.5 | 5.5~7.5 | |||
| YGT | 132M2-6 | 380/660/1140 | 5.5 | 9.2/5.3/3.1 | 90.3 | 0.98 | 73 | 2.8 | 9.5 | 7.5~11 | |||
| YGT | 160M-6 | 380/660/1140 | 7.5 | 12.9/7.4/4.3 | 90.2 | 0.98 | 73 | 2.8 | 9.5 | 11~15 | |||
| YGT | 160L-6 | 380/660/1140 | 11 | 18.6/10.7/6.2 | 91.5 | 0.98 | 73 | 2.8 | 9.5 | 15~18.5 | |||
| Синхронная скорость 750об/мин | |||||||||||||
| YGT | 225S0-8 | 380/660/1140 | 11 | 18.4/10.6/6.1 | 92.5 | 0. 98 98 | 75 | 2.7 | 9.0 | 15~18.5 | |||
| YGT | 225S1-8 | 380/660/1140 | 15 | 25/15/8.4 | 92.5 | 0.98 | 77 | 2.7 | 9.0 | 18.5~22 | |||
| YGT | 225S2-8 | 380/660/1140 | 18.5 | 31/18/10.3 | 92.8 | 0.98 | 77 | 2.7 | 9.0 | 22~30 | |||
| YGT | 225M-8 | 380/660/1140 | 22 | 37/21/12 | 93.7 | 0.98 | 80 | 2.7 | 9.0 | 30~37 | |||
| YGT | 280S-8 | 380/660/1140 | 37 | 62/36/21 | 93.0 | 0.98 | 82 | 2.7 | 9.0 | 45~55 | |||
| YGT | 280M-8 | 380/660/1140 | 45 | 75/43/25 | 93.6 | 0.98 | 82 | 2.7 | 9.0 | 55~75 | |||
| Синхронная скорость 500об/мин | |||||||||||||
| YGT | 200L1-12 | 380/660/1140 | 5. 5 5 | 9.4/5.5/3.2 | 90.5 | 0.98 | 72 | 2.5 | 8.8 | 7.5~11 | |||
| YGT | 225S1-12 | 380/660/1140 | 7.5 | 12.7/7.4/4.3 | 91.3 | 0.98 | 72 | 2.5 | 8.8 | 11~15 | |||
| YGT | 225S2-12 | 380/660/1140 | 11 | 18.6/10.7/6.2 | 91.6 | 0.98 | 75 | 2.4 | 8.8 | 15~18.5 | |||
| YGT | 225M1-12 | 380/660/1140 | 15 | 25/15/8.5 | 91.7 | 0.98 | 76 | 2.4 | 8.8 | 18.5~22 | |||
| YGT | 225M2-12 | 380/660/1140 | 18.5 | 31/18/10.3 | 94.3 | 0.98 | 76 | 2.4 | 8.8 | 22~30 | |||
| YGT | 250M1-12 | 380/660/1140 | 22 | 37/21/12 | 92.1 | 0.98 | 80 | 2.4 | 8.8 | 30~37 | |||
| YGT | 280S-12 | 380/660/1140 | 30 | 51/30/17 | 91. 2 2 | 0.98 | 80 | 2.4 | 8.8 | 37~45 | |||
| YGT | 280M-12 | 380/660/1140 | 37 | 62/36/21 | 92.5 | 0.98 | 82 | 2.4 | 8.8 | 45~55 | |||
| YGT | 315S-12 | 380/660/1140 | 45 | 74/43/25 | 94.5 | 0.98 | 82 | 2.4 | 8.8 | 55~75 | |||
| Синхронная скорость 375об/мин | |||||||||||||
| YGT | 280S1-16 | 380/660/1140 | 18.5 | 31/18/10 | 93.2 | 0.98 | 75 | 2.3 | 8.6 | 22~30 | |||
| YGT | 280S2-16 | 380/660/1140 | 22 | 37/22/13 | 91.4 | 0.98 | 76 | 2.3 | 8.6 | 30~37 | |||
| YGT | 280M1-16 | 380/660/1140 | 30 | 51/29/17 | 92.2 | 0.98 | 80 | 2.3 | 8.6 | 37~45 | |||
| YGT | 280M2-16 | 380/660/1140 | 37 | 62/36/21 | 93. 4 4 | 0.98 | 80 | 2.3 | 8.6 | 45~55 | |||
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Содержание
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента.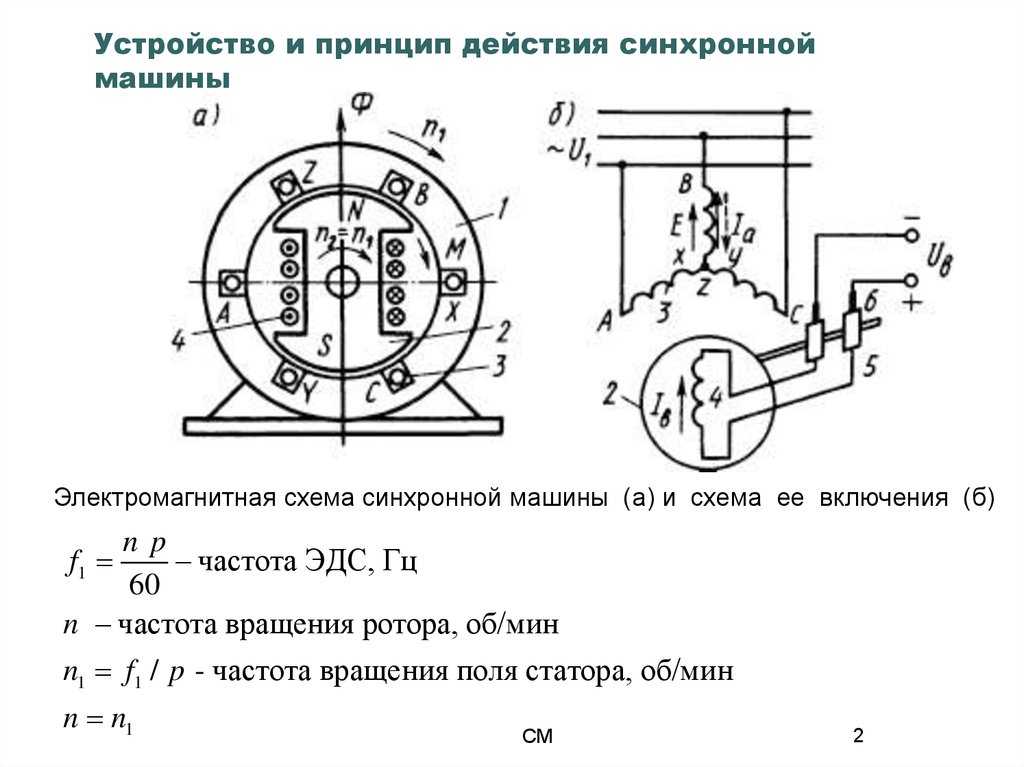 Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой.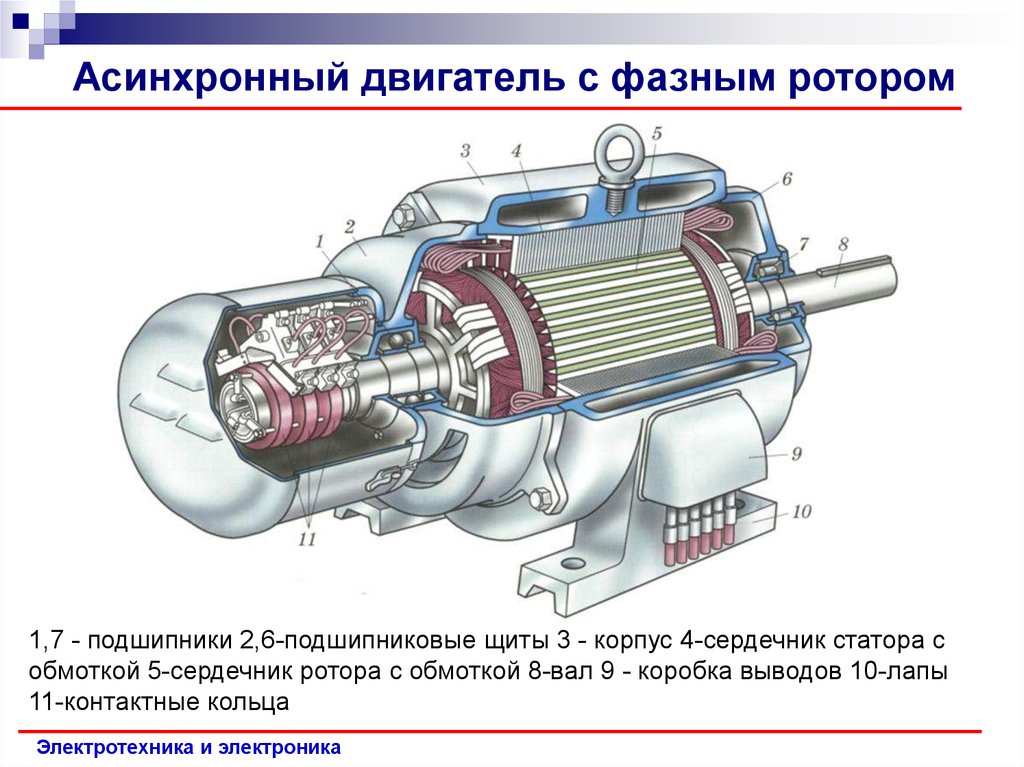 Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.

- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов.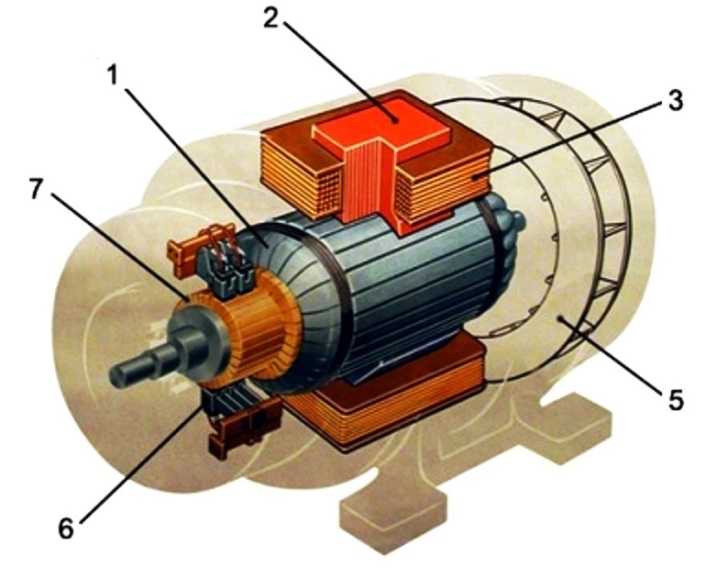 Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Работа 6. Трехфазный синхронный двигатель [1, с. 352…372; 2, с. 289…318]
26
Цель работы – экспериментальное исследование свойств синхронного двигателя (пуск, угловые и U-образные характеристики).
I. Программа работы
1. Ознакомление с конструкцией трехфазного синхронного двигателя и его паспортными данными.
2. Пуск синхронного двигателя.
3. Снятие угловых характеристик.
4. Снятие U-образных характеристик.
II. Общие сведения и описание установки
Основными
частями синхронной машины (рис.1) являются:
статор с трехфазной обмоткой, соединенной
звездой или треугольником (выводы С 6.1), ротор или неявнополюсный,
или с явно выраженными полюсами и
обмоткой постоянного тока (И1, И2
на рис.1), питающийся от возбудителя
В. Возбудитель может выполняться в виде
генератора постоянного тока параллельного
возбуждения (выводы обмотки, возбуждения
Ш1, Ш2 на рис.1). В лаборатории
ЭМ СПГГИ вместо возбудителя применяется
другой источник постоянного тока (блок
209 – выпрямитель).
6.1), ротор или неявнополюсный,
или с явно выраженными полюсами и
обмоткой постоянного тока (И1, И2
на рис.1), питающийся от возбудителя
В. Возбудитель может выполняться в виде
генератора постоянного тока параллельного
возбуждения (выводы обмотки, возбуждения
Ш1, Ш2 на рис.1). В лаборатории
ЭМ СПГГИ вместо возбудителя применяется
другой источник постоянного тока (блок
209 – выпрямитель).
Рис. 6.1
На роторе синхронных двигателей большой и средней мощности, кроме обмотки возбуждения, имеется короткозамкнутая пусковая обмотка, аналогичная короткозамкнутой обмотке ротора асинхронного двигателя. В двигателе, установленном лаборатории ЭМ СПГГИ в качестве пусковой обмотки двигателя используется трехфазная роторная обмотка, а в качестве обмотки возбуждения эта же обмотка в однофазном варианте.
Принцип
действия трехфазного синхронного
двигателя основан на том, что вращающееся
магнитное поле статора взаимодействует
с электромагнитами ротора. Вращающееся
магнитное поле создается трехфазным
током обмотки статора, электромагнитное
поле ротора возбуждается постоянным
током. Частота вращения магнитного поля
статора n0 и ротора
n определяются только
частотой тока f и числом пар полюсов
обмотки р:
Вращающееся
магнитное поле создается трехфазным
током обмотки статора, электромагнитное
поле ротора возбуждается постоянным
током. Частота вращения магнитного поля
статора n0 и ротора
n определяются только
частотой тока f и числом пар полюсов
обмотки р:
. (1)
Под действием нагрузки на валу синхронного двигателя происходит пространственное смещение ротора по отношению к вращающемуся полю статора на угол , приводящее к возрастанию вращающий момента, препятствующего этому смещению.
, (2)
где – угол нагрузки, равный сдвигу по фазе между фазным напряжением U1, и ЭДС E0; x – синхронное сопротивление фазы статора.
Зависимость
МЭМ=f()»
при Iв=const, U1=const
называется угловой характеристикой
неявнополюсного синхронного двигателя,
которая изображается в третьем квадранте
(линия 1, рис.6.2).Линией 3 отмечена
характеристика явнополюсного двигателя,
точка 1 ограничивает рабочий участок,
на котором MЭМ≈k.
Рис. 6.2 Рис. 6.3
При изменении нагрузки на валу синхронного двигателя от холостого хода до номинальной и кратковременных перегрузках, не превышающих максимального момента, частота вращения двигателя остается постоянной, что является одной из основных особенностей синхронного двигателя. Поэтому зависимость частоты вращения n от момента М на валу (при постоянных частоте f и напряжении U1), называемая механической характеристикой
,
изображается прямой, параллельной оси моментов (рис. 6.3).
При
возникновении нагрузок с моментами
М>Мm двигатель выпадает из
синхронизма. Благодаря наличию на роторе
короткозамкнутой обмотки синхронный
двигатель пускается как короткозамкнутый
асинхронный. Обмотка возбуждения при
этом замыкается на сопротивление R≈10Rв,
где Rв – сопротивление
обмотки возбуждения. При замкнутой
накоротко обмотке возбуждения или при
возбужденном роторе синхронный двигатель
не разгоняется до нужной частоты
вращения. По достижении «подсинхронной»
частоты вращения (n≈0,95n0)
в обмотку возбуждения подается постоянный
ток и ротор втягивается в синхронное
вращение. При нормальной работе
короткозамкнутая обмотка является
успокоительной обмоткой, так как
препятствует резким изменениям угла
.
По достижении «подсинхронной»
частоты вращения (n≈0,95n0)
в обмотку возбуждения подается постоянный
ток и ротор втягивается в синхронное
вращение. При нормальной работе
короткозамкнутая обмотка является
успокоительной обмоткой, так как
препятствует резким изменениям угла
.
Второй важной особенностью синхронного двигателя является возможность работы при одной и той же механической нагрузке с различными коэффициентами мощности, как по величине, так и по характеру (индуктивной или емкостной), что достигается за счет изменения тока возбуждения.
Обычно синхронные двигатели выпускаются для работы с опережающим током (cosн=0,8) и поэтому используются, как средство повышения коэффициента мощности участков сетей.
Зависимость тока статора I1 от тока возбуждения Iвс при одних к тех же механических нагрузках Р2 называется V-образными характеристиками синхронного двигателя (рис. 6.4)
при .
Если
обозначить ток возбуждения, при котором
cos=1,
Iвс0 то режим при
Iвс>Iвс0
называется перевозбуждением двигателя. Ток статора I1 при
этом опережает по фазе напряжение U1
и синхронный двигатель является
активно-емкостной нагрузкой для сети.
Ток статора I1 при
этом опережает по фазе напряжение U1
и синхронный двигатель является
активно-емкостной нагрузкой для сети.
Рис. 6.4 Рис. 6.5
При недовозбуждении (Iвс<Iв0) режим – индуктивный.
Минимальное значение тока I1=I1а на U-образной характеристике при cos=1 определяется нагрузкой на валу и потерями в двигателе.
Рабочими характеристиками синхронного двигателя называются зависимости параметров n, M, P, I1, , cos от мощности Р2 при U1=U1н; f=fн и Iвс=Iвсн (рис. 6.5).
Снятие рабочих характеристик производится путем изменения нагрузки на валу. Для создания нагрузки применяется генератор постоянного тока с независимым возбуждением.
Полезная мощность синхронного двигателя определяется как
, (3)
где Р1 – потребляемая двигателем мощность.
Для определения КПД двигателя находится КПД агрегата
, (4)
где
P2Г=UI
– полезная мощность нагрузочного
генератора; Г-–
КПД генератора; U, I
– напряжение и ток генератора.
Полагая ≈Г, получаем
(5)
Момент синхронного двигателя
(6)
Коэффициент мощности
(7)
Трехфазный синхронный двигатель
Изобретение относится к области электротехники и может быть использовано в трехфазных машинах с возбуждением от постоянных магнитов. Предлагаемый трехфазный синхронный двигатель состоит из трехфазного статора, обмотки которого создают вращающееся магнитное поле, и ротора, который содержит втулку из неферромагнитного материала, полюса возбуждения из ферромагнитных пластин с прослойками из пластин постоянных магнитов и дополнительные полюса из ферромагнитного материала с прослойками из неферромагнитного материала, устанавливаемыми вдоль радиальной осей дополнительных полюсов. Технический результат, достигаемый при использовании данного изобретения, состоит в обеспечении максимальной эффективности двигателя, определяемой соотношением между развиваемой двигателем полезной механической мощностью (Рмех. пол) и потребляемой двигателем электрической мощностью (Рэл.потр). 5 ил.
пол) и потребляемой двигателем электрической мощностью (Рэл.потр). 5 ил.
Изобретение связано с использованием трехфазных машин с возбуждением от постоянных магнитов Н02К 21/27.
Наиболее близким решением к заявленному изобретению является патент на синхронный двигатель с явно выраженными полюсами статора RU 2334341 (автор Бихман Р.И.) от 16.05.2007 г., который следует принять за прототип.
Отличием заявленного изобретения от прототипа является конструкция ротора двигателя, состоящего из неферромагнитной втулки ротора, полюсов возбуждения и дополнительных полюсов.
Полюса возбуждения состоят из ферромагнитных пластин (4) с прослойками из пластин постоянных магнитов (5). Все пластины перпендикулярны радиальным осям полюсов возбуждения.
Дополнительные полюса (6) из ферромагнитного материала с радиальными прослойками из неферромагнитного материала (7) устанавливаются вдоль радиальной оси дополнительных полюсов вплотную к полюсам возбуждения.
Целью изобретения является конструкция двигателя с максимальной эффективностью (Э), т.е. отношением полезной механической мощности, развиваемой двигателем (Рмех.пол) к потребляемой электрической мощности (Рэл.потр).
Заявленный синхронный двигатель содержит трехфазный статор (1, 2) обмотки которого (3) создают вращающееся магнитное поле, и ротор, состоящий из неферромагнитной втулки (8), на которой размещены полюса возбуждения и дополнительные полюса.
Полюса возбуждения состоят из ферромагнитных пластин (4) с прослойками из пластин постоянных магнитов (5). Все пластины установлены в плоскостях, перпендикулярных радиальным осям полюсов возбуждения.
Дополнительные полюса (6), устанавливаемые вплотную к полюсам возбуждения, выполнены из ферромагнитного материала с радиальными прослойками из неферромагнитного материала (7), размещаемыми вдоль оси дополнительных полюсов.
На фиг.1 приведено поперечное сечение заявленной конструкции трехфазного синхронного двигателя с явно выраженными полюсами статора с числом пар полюсов ротора Р=2.
На фиг.2а, 2b, 2с и 2d показаны пути прохождения осей магнитных потоков возбуждения (черными линиями) и осей магнитных потоков, создаваемых токами в обмотке статора (красными линиями) при углах между осями полюсов возбуждения и осями вращающегося магнитного поля статора (θ) при углах θ, равных 90, 60, 30 и 0 «электрических» градусов соответственно.
На фиг.1 и 2 приняты следующие обозначения:
1 — спинка статора; 2 — полюса статора; 3 — обмотки статора; 4 — ферромагнитные пластины полюсов возбуждения; 5 — пластины постоянных магнитов полюсов возбуждения; 6 — дополнительные полюса; 7 — радиальные прослойки из неферромагнитного материала; 8 — втулка ротора; 9 — вал двигателя.
Трехфазный синхронный двигатель, состоящий из статора из шихтованной тонколистовой электротехнической стали с трехфазной обмоткой, создающей вращающееся магнитное поле статора, и ротора, содержащего втулку из неферромагнитного материала, полюса возбуждения из ферромагнитных пластин с прослойками из пластин постоянных магнитов, а дополнительные полюса, устанавливаемые вплотную к полюсам возбуждения, выполнены из ферромагнитного материала и содержат прослойки из неферромагнитного материала, устанавливаемые вдоль радиальной оси дополнительных полюсов.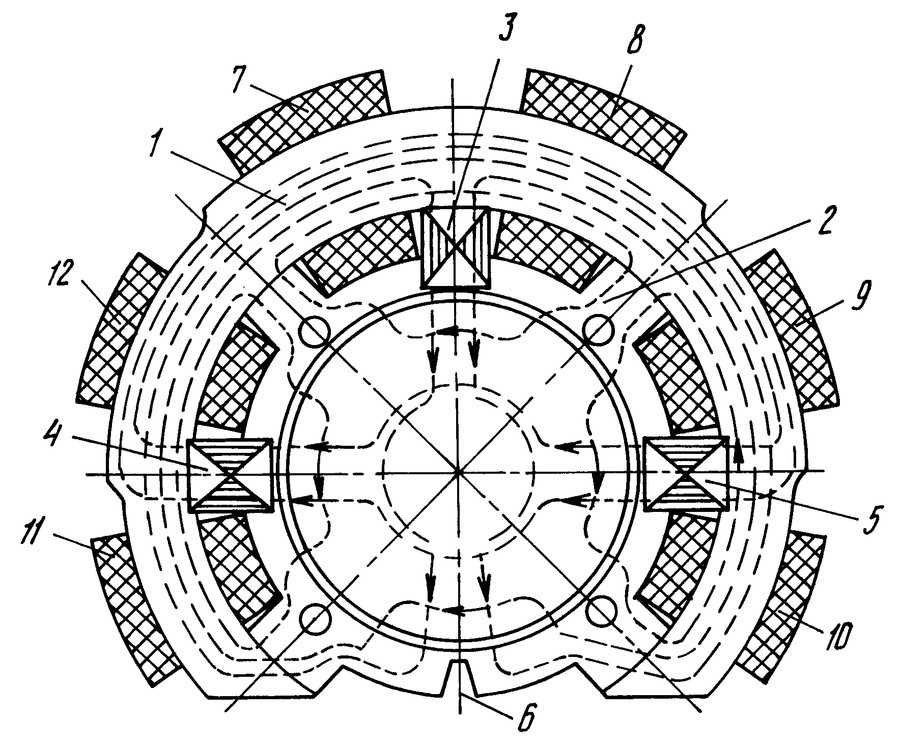
Похожие патенты:
Синхронный генератор // 2406211
Изобретение относится к области электротехники и касается особенностей конструктивного выполнения синхронных электрических машин, в частности — синхронных генераторов.
Бесконтактная редукторная магнитоэлектрическая машина с полюсным зубчатым индуктором // 2392723
Изобретение относится к области электротехники и в частности — к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается особенностей конструктивного исполнения бесконтактных магнитоэлектрических машин с электромагнитной редукцией и может быть использовано в системах автоматики, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, прямых приводов в бытовой технике, электроприводов бетоносмесителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами его вращения, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов и синхронных генераторов преобразователей частоты.
Электродвигатель с интенсивным магнитным потоком // 2336622
Изобретение относится к электротехнике и может быть использовано в электродвигателях для стиральных машин. .
Электродвигатель с постоянными магнитами // 2321143
Изобретение относится к электротехнике, к электродвигателям с постоянными магнитами. .
Устройство компенсированного двухфазного генератора повышенной эффективности // 2317628
Изобретение относится к области электротехники и касается особенностей конструктивного выполнения синхронных электрических машин с возбуждением от постоянных магнитов.
Электромеханический усилитель руля автомобиля и электродвигатель для усилителя руля // 2278797
Ротор высокооборотной электрической машины // 2273940
Изобретение относится к области электротехники и электромашиностроения, а именно к конструкциям роторов высокооборотных электрических машин. .
Электрическая машина // 2241298
Изобретение относится к области электротехники, в частности к электрическим машинам и электроприводу. .
.
Ротор электрической машины с постоянными магнитами // 2231896
Изобретение относится к области электротехники, а именно к роторам электрической машины с постоянными магнитами, и может быть использован в синхронных двигателях и генераторах, а также в вентильных двигателях, применяемых в электроприводах промышленных роботов, лентопротяжных механизмов, киноаппаратуре и программных устройствах.
Бесщеточный электродвигатель // 2231200
Изобретение относится к области электротехники и касается особенностей бесщеточных электродвигателей. .
Бесконтактная редукторная магнитоэлектрическая машина // 2407135
Изобретение относится к области электротехники и касается конструкций бесконтактных редукторных магнитоэлектрических машин с электромагнитной редукцией, предназначенных для использования в качестве мотор-колес, мотор-барабанов, прямых приводов в бытовой технике (электромясорубки, стиральные машины и пр.), электроприводов бетономестителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами вращения вала, а также в качестве высокочастотных электрических генераторов.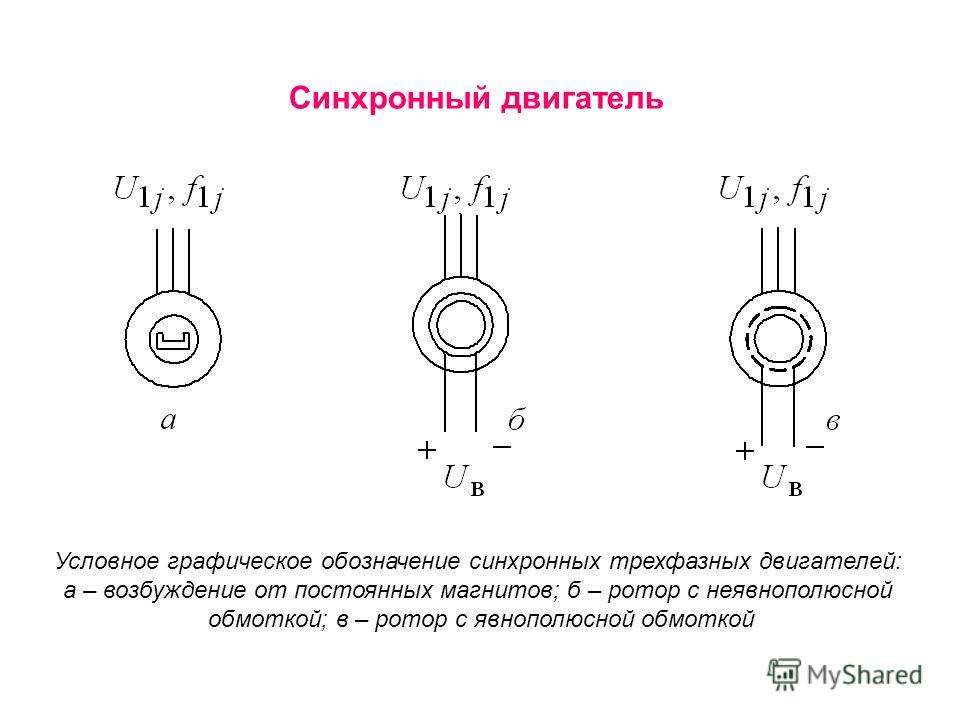
Однофазный бесконтактный магнитоэлектрический генератор // 2393615
Изобретение относится к области электротехники, в частности — к однофазным электрическим генераторам с постоянными магнитами, и может быть использовано в автономных системах электрооборудования, в автоматике и бытовой технике, на авиационном и автомобильном транспорте, в качестве ветрогенераторов, высокочастотных электрических генераторов и синхронных преобразователей частоты однофазного переменного тока, а также при выпрямлении переменной ЭДС при помощи неуправляемых и управляемых полупроводниковых вентилей — в качестве генераторов постоянного тока, возбудителей синхронных генераторов передвижных мини-электростанций, подвозбудителей главных возбудителей синхронных генераторов на стационарных электростанциях.
Бесконтактная редукторная электрическая машина с комбинированным возбуждением // 2390086
Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается особенностей конструктивного исполнения бесконтактных электрических машин с электромагнитной редукцией, и может быть использовано в системах автоматики, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, электроприводов большой и средней мощности судов, транспортных средств, бетоносмесителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами его вращения, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов и синхронных генераторов преобразователей частоты.
Бесконтактная редукторная магнитоэлектрическая машина с многопакетным индуктором // 2382475
Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям, электроприводам и генераторам, касается особенностей конструктивного исполнения бесконтактных магнитоэлектрических электрических машин с электромагнитной редукцией и может быть использовано в системах автоматики, в качестве мотор-колес, мотор-барабанов, стартер-генераторов, электроусилителей руля, прямых приводов в бытовой технике, электроприводов бетоносмесителей, грузоподъемных механизмов, ленточных транспортеров, насосов для перекачки жидкостей, механизмов с высокими моментами на валу и низкими частотами его вращения, а также в качестве ветрогенераторов, гидрогенераторов, высокочастотных электрических генераторов и синхронных генераторов преобразователей частоты.
Магнитная система ротора и способ ее изготовления // 2264022
Изобретение относится к области электротехники и касается конструктивного исполнения магнитных систем роторов бесколлекторных электрических машин с постоянными магнитами.
Статор ветроэлектрогенератора // 2253042
Изобретение относится к области ветроэнергетики, а именно к ветроэлектрогенераторам. .
Однофазный синхронный самозапускающийся двигатель // 2251783
Изобретение относится к однофазным двухполюсным синхронным двигателям малой мощности. .
Ротор скважинного генератора // 2183043
Изобретение относится к электротехнике, а именно, к электромашинным источникам питания инклинометрических систем. .
Способ изготовления ротора высокоскоростной электрической машины // 2155430
Изобретение относится к электротехнике, а именно — к технологии изготовления высокоскоростных электрических машин с постоянными магнитами, и может быть использовано также при сборке других вращающихся конструкций.
Однофазный синхронный генератор (варианты) // 2081495
Изобретение относится к электротехнике и может быть использовано в автономных энергоустановках. .
Неявнополюсный ротор синхронной электрической машины // 2410819
Изобретение относится к области электротехники и электромашиностроения, в частности к особенностям конструктивного выполнения роторов электрических машин. .
.
Однофазные электродвигатели напряжения 220В © Геостарт
Рубрика: Инструменты и оборудование
Наша жизнь стала уже просто немыслима без различных электромоторов. Пылесосы, стиральные машины, холодильники вентиляторы, кондиционеры, даже часы — все эти приборы снабжены электродвигателями. Если прибор подключается к домашней электрической сети, то, вероятнее всего, в нем стоит однофазный асинхронный двигатель 220В.
Принцип действия
Всем нам на школьных уроках физики демонстрировали опыты с проволочной рамкой, помещенной в поле постоянного магнита. Если через рамку пропустить ток, то на проводники в правой и левой части рамки будет действовать силы Ампера, создающие вращающий момент, и рамка с током будет поворачиваться до тех пор, пока она не займет положение, в котором действующие силы уравновешивают друг друга.
Если заставить поле вращаться, рамка с током будет вращаться вместе с ним. На этом принципе основана работа синхронного электродвигателя. Рамка с магнитами — аналог электрического двигателя. Вращающаяся рамка с током — ротор. Неподвижные магниты — статор.
Рамка с магнитами — аналог электрического двигателя. Вращающаяся рамка с током — ротор. Неподвижные магниты — статор.
Трехфазный синхронный двигатель
Теперь надо заставить неподвижный статор создать вращающееся магнитное поле.
Для начала заменим постоянные магниты катушками с током обмотками статора. Катушка с током создает такое же магнитное поле, как и магнит. Разместим на статоре не одну катушку-магнит, а три, повернув их на 120 градусов относительно друг друга. Подадим на эти обмотки переменный ток со сдвигом фаз на 120 градусов. Именно так сдвинуты фазы в трехфазной сети.
Результирующее магнитное поле есть результат векторного сложения трех полей. Суммарный вектор магнитной индукции будет вращаться с частотой переменного тока. За один период магнитное поле, создаваемое статором трехфазного двигателя, совершает полный оборот. Ротор, который аналогичен катушке с током, поворачивается вместе с магнитным полем статора с той же скоростью. Таким образом ротор синхронного двигателя вращается частотой питающего переменного тока.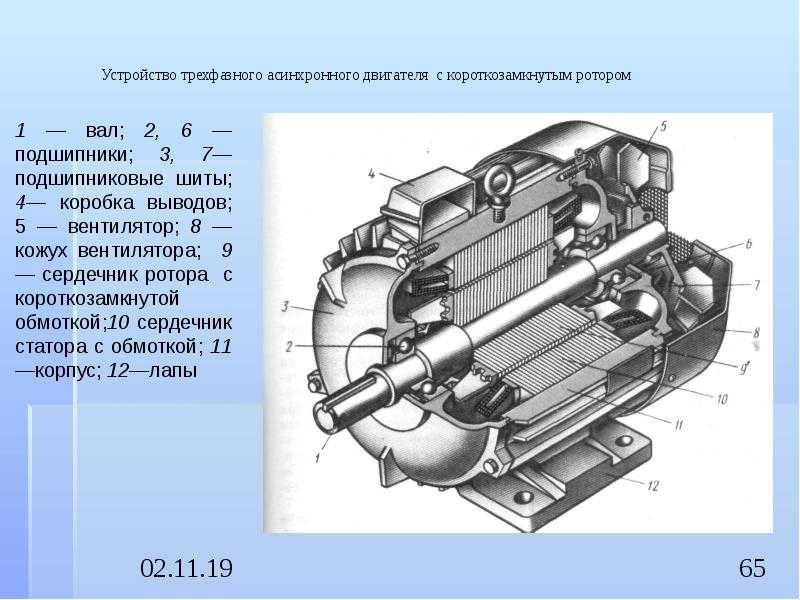
Синхронные двигатели обладают самыми лучшими характеристиками, развивают максимальную мощность и обеспечивают высокий КПД. Однако там тяжелый ротор с обмотками, который сложно балансировать. К обмоткам ротора надо подводить ток, а это требует применения крайне ненадежного щеточного узла. В общем, синхронный двигатель — это хорошо, но сложно, дорого и не очень надежно.
Трехфазный асинхронный двигатель
Замкнем концы рамки накоротко. Получим один короткозамкнутый виток. Наш трехфазный статор создает вращающееся магнитное поле. Пусть это поле и создает ток в короткозамкнутом роторе.
Когда поле статора вращается относительно неподвижной рамки, оно создает в ее контуре переменный магнитный поток. По закону электромагнитной индукции переменное поле наводит в рамке электрический ток . Ток создает вращающий момент, и рамка поворачивается вслед за магнитным полем, как и в синхронном двигателе.
Но есть одно принципиальное отличие. В синхронном двигателе ротор вращается одновременно, то есть синхронно с полем статора. Ротор относительно поля статора неподвижен.
В синхронном двигателе ротор вращается одновременно, то есть синхронно с полем статора. Ротор относительно поля статора неподвижен.
В асинхронном двигателе ротор пытается догнать вращающееся поле, но всегда немного отстает, как бы скользит относительно него. Если вдруг скорость вращения ротора точно сравняется со скоростью поля, то в роторе перестанет наводиться ток индукции.
Разность частот вращения магнитного поля и ротора асинхронного двигателя называется скольжением. Именно оно обеспечивает наличие тока в роторе.
Асинхронные электродвигатели уступают синхронным по всем характеристикам , но значительно проще, легче, надежнее и дешевле. Практически все электрические двигатели, применяемые сегодня в промышленности — это асинхронные трехфазные двигатели.
Механическая характеристика
Механическая характеристика двигателя — это зависимость момента на валу от скорости вращения.
Как уже было сказано, скорость вращения ротора в асинхронном двигателе всегда отличается от скорости вращения поля статора на величину скольжения.
Скольжение S = (n1- n2)/n1, где n1 — это скорость вращения поля, а n2 — скорость вращения ротора.
Характеристика показывает, что двигатель может работать в пяти режимах:
- Холостой ход.
- Пуск.
- Двигательный режим.
- Режим рекуперации.
- Генераторный режим.
В режиме холостого хода скольжение S равно 0. Ротор вращается синхронно с магнитным полем, как в синхронном двигателе, а момент вращения равен 0. Режим холостого хода — чисто гипотетический и никогда не реализуется на практике.
В момент пуска ротор еще неподвижен и S= 1. Момент вращения при S=1 называется пусковым моментом.
После пуска ротор входит в двигательный режим и начинает раскручиваться, постепенно догоняя магнитное поле. В двигательном режиме 1 > S > 0.
В двигательном режиме 1 > S > 0.
Если ротор вдруг каким-то образом обгонит поле, то наступит режим рекуперации. При этом двигатель отдает энергию в сеть. В режиме рекуперации S < 0.
S > 1 соответствует генераторному режиму. В генераторном режиме ротор движется навстречу потоку и генерирует электрический ток.
S = Sn соответствует номинальному режиму. Номинальное значение скольжения составляет обычно 2−8%.
Однофазный асинхронный двигатель
Можно еще упросить трехфазный асинхронный двигатель .
Оставим на статоре всего одну обмотку и подадим туда однофазный электрический ток. У нас получился однофазный асинхронный двигатель. В этом двигателе поле статора неподвижно — в этом принципиальное отличие однофазного двигателя от многофазного. Тем не менее такой двигатель работает.
Однофазный двигатель не может стартовать самостоятельно. Ничего особенного в этом нет. Привычный нам двигатель внутреннего сгорания тоже надо сначала раскрутить. В автомобиле мы пользуемся дополнительным электродвигателем — стартером, а в бензопиле делаем это вручную, дергая пусковой шнур.
В автомобиле мы пользуемся дополнительным электродвигателем — стартером, а в бензопиле делаем это вручную, дергая пусковой шнур.
Если однофазный двигатель подтолкнуть, причем в любую сторону, он разгонится и будет поддерживать вращение в заданном направлении.
Ели ротору придать вращение в определенном направлении, он будет двигаться попутно с одним полем и навстречу другому.
Двигатель можно представить как два трехфазных мотора, насаженных на один вал, но включенных во встречном направлении. При запуске вал неподвижен и моторы уравновешивают друг друга.
Если вал раскрутить внешней силой в каком-то направлении, то один мотор, запущенный в попутном направлении, окажется в двигательном режиме, а другой — в генераторном. Механическая характеристика показывает, что крутящий момент в двигательном режиме больше, чем в генераторном , поэтому попутный мотор перетягивает.
Пуск
Для запуска однофазного электромотора на его статоре наматывают дополнительную пусковую обмотку перпендикулярно основной и подают в нее ток со сдвигом по фазе. Для сдвига фазы последовательно с обмоткой включают фазосдвигающий элемент. В качестве фазосдвигающего элемента можно использовать резистор, дроссель или конденсатор. В любом случае полное комплексное сопротивление в цепях основной и пусковой обмоток будет разным, и токи получат фазовый сдвиг.
Для сдвига фазы последовательно с обмоткой включают фазосдвигающий элемент. В качестве фазосдвигающего элемента можно использовать резистор, дроссель или конденсатор. В любом случае полное комплексное сопротивление в цепях основной и пусковой обмоток будет разным, и токи получат фазовый сдвиг.
Чаще всего для сдвига фаз используют конденсатор.
Скорость вращения
В сетях наших энергоснабжающих компаний используется переменное напряжение 220/380 с частотой 50 Гц. Причем частота переменного тока 50 Гц поддерживается с точностью до 2 процентов. Как нам уже известно, ротор синхронного электромотора вращается с частотой переменного тока . То есть при частоте питающей сети 50 Гц ротор совершает 50 оборотов в секунду или 3000 оборотов в минуту. Обмотку статора можно разделить на секции и сделать мотор многополюсным. В многополюсном моторе скорость понижается с ростом числа полюсов и в общем случае равна 3000/ p оборотов, где p — это число полюсов.
Таким образом скорость вращения сетевого электромотора в нашей стране не может быть выше 3000 оборотов в минуту. В странах, где принята частота сети в 60 Гц, например, в США, электромоторы крутятся с максимальной скоростью в 3600 оборотов в минуту. И здесь мы снова отстаем от Америки.
В синхронном электромоторе обороты не зависят от нагрузки. При росте нагрузки ротор синхронной машины отстает от поля на больший угол, но частота вращения не меняется.
В асинхронном режиме величина скольжения зависит от нагрузки. Таким образом, при увеличении нагрузки скорость асинхронного электромотора падает.
Схемы подключения
Пусковая обмотка, включенная со сдвигом по фазе, поворачивает магнитное поле и превращает на время запуска однофазный электродвигатель в двухфазный.
Дополнительная обмотка не рассчитана на длительную работу и после выхода на рабочий режим должна быть отключена. Отключение производится либо вручную кнопкой, либо центробежным выключателем, либо тепловым реле по нагреву пусковой обмотки.
В однофазном двигателе в рабочем режиме магнитное поле статора неподвижно . В этом его главное отличие от многофазного.
Иногда ошибочно называют однофазными электромоторы, дополнительная обмотка которых подключена через конденсатор постоянно.
В однофазную сеть можно подключить и трехфазный мотор, если одну из фазных обмоток подключить через конденсатор. Так что, если в вашем распоряжении вдруг оказался промышленный трехфазный электромотор, вы можете использовать его в однофазной домашней сети, хотя и с потерей мощности и более низким КПД.
Сравнение двигателей
Синхронный
- На роторе есть обмотка, в которую подается ток.
- Частота вращения вала совпадает или кратна частоте питающей сети.
- Скорость стабильна и не меняется под нагрузкой.
Асинхронный
- Ротор не подключен к источнику тока.
- Частота вращения вала ниже частоты сети на величину скольжения.

- Скорость снижается с ростом нагрузки.
Однофазный асинхронный
- Единственная обмотка на статоре.
- Вращается в любом направлении.
- Не запускается самостоятельно.
|
автор Егорова София |
Трехфазный синхронный двигатель | Строительство | Работа | Методы запуска
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
В этой статье мы подробно рассмотрели конструкцию трехфазного синхронного двигателя, принцип работы, способы пуска и применение:
- Конструкция синхронного двигателя
- Принцип работы
- Применение синхронных двигателей
- Методы пуска синхронных двигателей
Трехфазный синхронный двигатель не имеет пускового момента. Его нужно довести до скорости или как можно ближе к ней каким-то другим способом, чтобы он мог привести себя в синхронизм.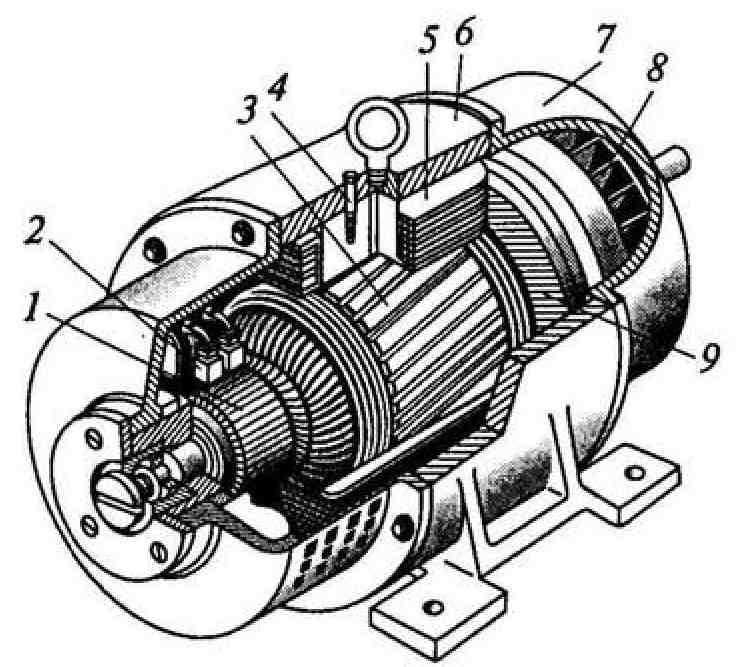
После набора скорости поле ротора можно возбудить постоянным током, после чего ротор, по сути, протаскивается с той же скоростью, что и трехфазное поле статора. Его скорость синхронизирована со скоростью поля статора. Принципиально он заметно отличается от асинхронного двигателя 9.0018, где вращающееся поле статора давит на индуцированное поле ротора. Это заставляет ротор вращаться, но с некоторым проскальзыванием, тогда как в синхронном двигателе проскальзывания не может быть, а просто «зависание» из-за нагрузки, приложенной к машине. Это показано на Рисунок 1 и показано как угол крутящего момента. Если нагрузка становится слишком большой для синхронного двигателя, он немедленно выходит из синхронизма и останавливается.
Рисунок 1 Относительное положение магнитных полей статора и ротора
Конструкция синхронного двигателя
Статор
Статор имеет трехфазную обмотку того же типа, что и в генераторе переменного тока или асинхронном двигателе.
Когда эта обмотка находится под напряжением переменного тока, она создает магнитный поток, который вращается со скоростью, называемой синхронной скоростью. Это та же самая скорость, с которой должна работать синхронная машина, чтобы генерировать напряжение переменного тока на частоте сети.
Скорость вращающегося магнитного поля можно определить по следующей формуле:
Ротор
Несмотря на то, что конструкция аналогична ротору генератора переменного тока, он обычно имеет явно выраженные полюса. При возбуждении постоянным током он создает чередующиеся северный и южный магнитные полюса, которые притягиваются к полюсам, созданным в статоре.
Принцип работы
Синхронный двигатель работает по принципу магнитного притяжения между двумя магнитными полями противоположной полярности; один — это вращающееся магнитное поле статора, а другой — магнитное поле ротора.
Синхронный двигатель имеет крутящий момент только при синхронной скорости, поэтому необходимо предпринять специальные шаги, чтобы разогнать двигатель до скорости и синхронизировать его с источником питания. Затем два магнитных поля вращаются с одинаковой скоростью и фиксируются друг с другом.
Затем два магнитных поля вращаются с одинаковой скоростью и фиксируются друг с другом.
Влияние нагрузки на синхронный двигатель
Когда синхронный двигатель работает без нагрузки, взаимное расположение полюсов статора и ротора совпадает (см. Рисунок 1(a) ).
При приложении нагрузки ротор должен продолжать вращаться с синхронной скоростью, но из-за тормозящего действия нагрузки полюс ротора отстает от полюса статора. Их относительное положение смещено на угол а, который называется углом «крутящего момента» или «нагрузки» (см. 9).0017 Рисунок 1(b) ). Чем больше приложенная нагрузка, тем больше угол крутящего момента.
Магнитная связь между каждым полюсом статора и ротора искажается в зависимости от приложенной нагрузки. Если нагрузка на двигатель становится чрезмерной, магнитная муфта разрывается, и ротор замедляется до полной остановки.
Когда двигатель вращается с синхронной скоростью, с фиксированным возбуждением постоянного тока в обмотках ротора, поток ротора разрезает обмотки статора, индуцируя напряжение в каждой фазной обмотке. По закону Ленца это напряжение противодействует приложенному напряжению. Соотношение фаз между этим индуцированным напряжением и приложенным напряжением зависит от относительного положения каждого полюса статора и ротора, которые, в свою очередь, зависят от нагрузки, приложенной к двигателю.
По закону Ленца это напряжение противодействует приложенному напряжению. Соотношение фаз между этим индуцированным напряжением и приложенным напряжением зависит от относительного положения каждого полюса статора и ротора, которые, в свою очередь, зависят от нагрузки, приложенной к двигателю.
На примере идеального синхронного двигателя без потерь можно рассмотреть работу на холостом ходу. Если пренебречь потерями в двигателе, на холостом ходу угол крутящего момента равен нулю, поэтому индуцированное напряжение В g и приложенное напряжение В равны и противоположны. Результирующее напряжение В R на обмотках равно нулю, поэтому ток, потребляемый от источника, также равен нулю. Это показано векторами на Рисунок 2(a) . Рисунок 2 Влияние нагрузки на линейный ток при постоянном возбуждении теперь (180 − α) ° E не совпадает по фазе с приложенным напряжением В (см. Рисунок 2(b) ).
Рисунок 2(b) ).
Сочетание этих двух напряжений дает эффективное напряжение В R на обмотках статора, что достаточно для получения тока I от источника питания. Из-за относительно высокой индуктивности обмоток статора линейный ток I в каждой обмотке отстает от каждого результирующего напряжения В R почти на 90°E. Это приводит к тому, что линейный ток I отстает от приложенного напряжения на Φ.
По мере увеличения нагрузки угол крутящего момента увеличивается. Это вызывает увеличение результирующего напряжения В R на каждой обмотке статора (см. Рисунок 2(c) ). Из-за увеличения значения В R линейный ток I увеличивается, а фазовый угол Φ между приложенным напряжением В и линейным током I также увеличивается. Следовательно, при фиксированном возбуждении любое увеличение нагрузки синхронного двигателя приведет к увеличению линейного тока при более низком коэффициенте мощности.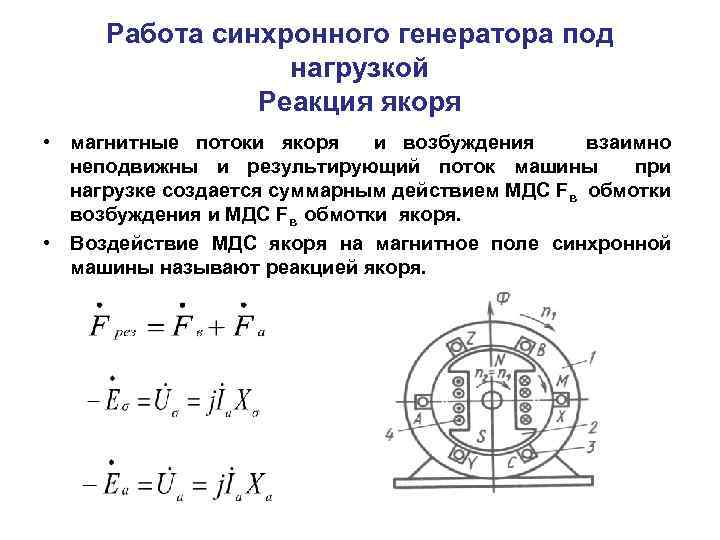
Эффект переменного возбуждения поля
Если нагрузка, приложенная к синхронному двигателю, постоянна, то и мощность, подводимая к двигателю, также постоянна. При изменении возбуждения поля ротора изменяется и индуцированное напряжение в каждой обмотке статора.
Векторная диаграмма Рисунок 3(a) на обороте представляет условия для данной нагрузки при коэффициенте мощности, равном единице. Потребляемая мощность на фазу составляет VI 1 . Если возбуждение поля ротора уменьшается, индуцированное напряжение V g уменьшается (см. Рисунок 3(b) ). Это приводит к тому, что линейный ток I 2 отстает от приложенного напряжения В на Φ 2 .
Поскольку нагрузка и, следовательно, потребляемая мощность постоянны, компонент мощности I 2 должен оставаться таким же, как I 1 в Рисунок 3(a) . Линейный ток I 2 должен увеличиться, чтобы компенсировать запаздывающий коэффициент мощности. Следовательно, уменьшение возбуждения поля постоянного тока вызывает увеличение линейного тока и отстающий коэффициент мощности.
Линейный ток I 2 должен увеличиться, чтобы компенсировать запаздывающий коэффициент мощности. Следовательно, уменьшение возбуждения поля постоянного тока вызывает увеличение линейного тока и отстающий коэффициент мощности.
Рисунок 3 Эффект изменения возбуждения постоянным током
Если возбуждение постоянным током увеличивается, индуцируемое напряжение В g увеличивается (см. Рисунок 3(c)). Линейный ток I 3 опередит приложенное напряжение В на Φ 3 , а также будет больше, чем I 1 в компоненте 3 (a)18, используемом для питания. то же самое из-за того, что нагрузка остается постоянной. Следовательно, увеличение возбуждения постоянным током вызывает увеличение линейного тока и опережающего коэффициента мощности.
Видно, что если возбуждение синхронного двигателя на постоянной нагрузке изменяется от низкого до более высокого значения, то:
1. Ток статора постепенно уменьшается, достигает минимума, а затем снова увеличивается
Ток статора постепенно уменьшается, достигает минимума, а затем снова увеличивается
2. Коэффициент мощности, вначале отстающий, постепенно увеличивается, становится единицей при минимальном токе статора, а затем снова уменьшается, но становится опережающим.
Следует соблюдать осторожность при регулировке возбуждения синхронного двигателя. Есть пределы, до которых это можно довести с безопасностью.
Перевозбуждение и недовозбуждение могут привести к нестабильности синхронного двигателя. Как только эти пределы превышены, мощность, вырабатываемая двигателем, снижается, и опасность перегрузки становится неизбежной, поскольку машина превышает свои проектные пределы.
Наиболее очевидная ситуация — это недовозбуждение , когда магнитная связь между вращающимся полем и ротором настолько ослаблена, что нагрузка превышает тяговый момент двигателя, и он выходит из синхронизма.
Перевозбуждение создает ситуацию, когда ток сети и механическая нагрузка превышают номинальную нагрузку машины при полной нагрузке, а магнитная связь становится настолько жесткой, что изменения нагрузки создают чрезмерные механические нагрузки на вал двигателя.
Колебания в синхронных двигателях
Изменение нагрузки синхронного двигателя вызывает изменение значения угла крутящего момента (см. Рисунок 1 ). В общем, инерция ротора препятствует мгновенному переходу к новым условиям, в результате чего ротор смещается за точку равновесия и затем должен корректироваться.
В то время как ротор и вращающееся поле в статоре все еще вращаются с синхронной средней скоростью, изменение нагрузки на ротор вызывает это периодическое колебание вокруг точки равновесия. Эти выбросы или колебания вызывают нежелательные колебания линейного тока двигателя.
Обычный метод демпфирования этих выбросов заключается в использовании демпфирующей обмотки, называемой амортизирующей обмоткой . Он состоит из медных стержней, встроенных в полюсные поверхности ротора и закороченных на каждом конце (см.0017 Рисунок 4). Любые выбросы вызывают индуцированное напряжение в медных стержнях. Это приводит к созданию магнитного поля, противостоящего эффекту помпажа.
Это приводит к созданию магнитного поля, противостоящего эффекту помпажа.
Рисунок 4 Явнополюсные с амортизирующими обмотками
Часто закорачивающие стержни растягиваются вокруг ротора, в результате чего ротор с короткозамкнутым ротором наматывается на явно выраженные полюса. Ослабляя любую тенденцию ротора к колебанию, они также могут помочь двигателю запуститься, действуя как секции обмотки с короткозамкнутым ротором. По сути, эта обмотка позволяет запустить двигатель как асинхронный двигатель.
Применение синхронных двигателей
Коррекция коэффициента мощности
Возможность регулирования коэффициента мощности синхронного двигателя во время его работы может быть успешно использована в промышленности как средство коррекции коэффициент мощности нагрузок, питаемых от сети предприятия.
Синхронный двигатель может работать без нагрузки, но чаще он используется для привода какого-либо оборудования, необходимого для работы установки; например, воздушные или гидравлические компрессоры, высокочастотные генераторы переменного тока, большие вентиляторы и воздуходувки или системы подачи воды под высоким давлением.
Дополнительным преимуществом может быть экономический стимул, предлагаемый распределительными организациями для обеспечения определенного минимального значения коэффициента мощности в установке. Например, плата за кВтч может быть снижена, если коэффициент мощности не опустится ниже 0,75 или аналогичного Рисунок . Там, где распределяется большое количество энергии и требуется коррекция коэффициента мощности, специально разработанные синхронные двигатели работают без какой-либо подключенной нагрузки. В этих условиях синхронный двигатель с перевозбуждением называется «синхронным конденсатором» или «конденсатором».
Контроль напряжения
Важным применением является контроль напряжения для линий электропередачи . Синхронные двигатели устанавливаются в подходящих местах на линии, и их возбуждение регулируется по желанию, чтобы заставить их потреблять отстающие или опережающие токи для повышения или понижения напряжения. При установке синхронных двигателей в этих условиях наблюдается большая стабильность напряжения на линии передачи.
При установке синхронных двигателей в этих условиях наблюдается большая стабильность напряжения на линии передачи.
Низкоскоростные приводы
Синхронный двигатель имеет хороший КПД, и при низких скоростях его высокая начальная стоимость адекватно компенсируется сравнительно более низкими эксплуатационными расходами. При низких скоростях асинхронный двигатель имеет падающий КПД, тогда как синхронный двигатель сохраняет свой высокий КПД.
Дробильные головки для горных пород и руды
Для этого применения требуется дробильная головка, которая движется очень медленно и имеет очень тяжелый вращающийся маховик для обеспечения кинетической энергии, когда на дробильную головку воздействуют внезапные ударные нагрузки.
Методы пуска синхронных двигателей
Вспомогательные двигатели
Некоторые синхронные двигатели оснащены специальным двигателем, предназначенным для использования только в период пуска. Вспомогательный двигатель разгоняет синхронный двигатель до скорости, на которой он сначала синхронизируется, а затем подключается к источнику питания. Это дорогостоящий метод, особенно если требуются высокие пусковые моменты.
Вспомогательный двигатель разгоняет синхронный двигатель до скорости, на которой он сначала синхронизируется, а затем подключается к источнику питания. Это дорогостоящий метод, особенно если требуются высокие пусковые моменты.
Пуск асинхронного двигателя
В этом методе на обмотки статора подается пониженное линейное напряжение, а обмотка постоянного тока на роторе закорачивается. С помощью амортизирующих обмоток вся машина ведет себя как асинхронный двигатель, разгоняясь до скорости немного ниже синхронной.
В нужный момент короткое замыкание устраняется из обмотки ротора, на обмотку ротора подается постоянный ток, а на обмотку статора подается полное линейное напряжение. Поскольку скорость лишь немного меньше синхронной скорости, поле ротора может синхронизироваться с полем статора и ускоряться до синхронизма.
Вы нашли apk для Android? Вы можете найти новые бесплатные игры и приложения для Android.
Трехфазные синхронные двигатели Вопросы и ответы
Этот набор вопросов и ответов с несколькими вариантами ответов (MCQ) посвящен теме «Двигатели постоянного тока — трехфазные синхронные двигатели».
1. Прямая ось взята вдоль ________
а) Межполярная ось
б) Полюсная ось ротора
в) Между межполюсной и роторной осью
г) Параллельно межполюсной оси
View Answer
Ответ: b
Объяснение: Прямая ось ориентирована вдоль оси полюса ротора, а квадратурная ось расположена под углом 90° к оси полюса ротора. Прямая ось не ориентирована вдоль межполярной оси.
2. Четырехполюсный трехфазный асинхронный двигатель частотой 60 Гц работает со скоростью 1500 об/мин. Частота тока ротора двигателя в Гц составляет __________
а) 5
б) 4
в) 2
г) 7
Просмотр Ответ
Ответ: б
Пояснение: При заданном числе полюсов = 4. Частота питания составляет 60 Гц. Скорость вращения ротора 1500 об/мин. № с = 120×f÷P = 120×60÷4 = 1800 об/мин. S=N с -N r ÷N с = 1800-1500÷1800 = 0,166. F 2 =sf=0,166×60=4 Гц.
3. Рассчитать фазовый угол синусоидального сигнала z(t)=8cos(45t+2π÷15).
a) 2π÷39
b) 2π÷15
c) π÷4
d) 2π÷44
View Answer
Ответ: b
Пояснение: Синусоидальная форма обычно выражается в виде V=V м sin(ωt+α), где V м представляет собой пиковое значение, ω представляет собой угловую частоту, α представляет собой разность фаз.
объявление
объявление
4. Пути потока рассеяния ________ на угловом положении ротора.
a) Зависимый
b) Пропорциональный
c) Независимый
d) Зависимый и независимый
Просмотреть Ответ
Ответ: c
Пояснение: Поток рассеяния и реактивное сопротивление рассеяния постоянны независимо от углового положения ротора. Хотя реакция якоря зависит от углового положения ротора в машине с явным полюсом, но в машине с цилиндрическим ротором обе величины не зависят от положения ротора.
5. Явление рысканья в синхронном двигателе также называют _________
a) Помпаж
b) Качание фазы
c) Колебание фазы
d) Помпаж и качание фазы
Просмотреть ответ
Ответ: d
Объяснение: Во время поиска , мощность колеблется, поэтому наблюдаются скачки напряжения, и, следовательно, это можно назвать скачком. Кроме того, фазовый угол ротора колеблется, и это называется качанием фазы.
Кроме того, фазовый угол ротора колеблется, и это называется качанием фазы.
6. Что из нижеперечисленного используется для предотвращения явления рысканья в синхронных генераторах?
a) Демпферные стержни
b) Короткие хорды
c) Распределенная обмотка
d) Демпферные стержни и короткие хорды
View Answer
Ответ: a
Пояснение: Демпферные стержни пытаются поддерживать синхронность между вращающимся магнитным полем и ротором поэтому они помогают предотвратить охоту. Он производит скачки в машине.
7. В синхронной машине последовательность фаз может быть изменена путем изменения направления _________
a) Направление ротора
b) Полярность возбуждения
c) Клемма якоря
d) Направление ротора и клемма якоря
Посмотреть ответ
Ответ: a
Пояснение: В синхронном генераторе последовательность фаз определяется направлением вращения ротора, а в синхронном двигателе последовательность фаз определяет направление вращения ротора.
реклама
8. Наклон кривой V-I 7°. Рассчитайте значение сопротивления. Предположим, что зависимость между напряжением и током представляет собой прямую линию.
а) 0,122 Ом
b) 0,360 Ом
c) 0,377 Ом
d) 0,578 Ом
Посмотреть ответ
Ответ: a
Пояснение: Наклон кривой V-I представляет собой сопротивление. Указанный наклон составляет 7 °, поэтому R = tan (7 °) = 0,122 Ом. Наклон кривой IV пропорционален сопротивлению.
9. В асинхронном двигателе, когда количество пазов в статоре не равно целому числу пазов в роторе _________
а) Может быть неравномерность характеристик скольжения момента
б) Будет доступен высокий пусковой момент
в ) Машина работает лучше
d) Машина может не запуститься
Просмотреть ответ
Ответ: c
Объяснение: Если количество пазов статора не является целым кратным числа пазов ротора, машина не запустится. Это не вызывает явления зубчатости.
объявление
10. Трехфазный асинхронный двигатель работает со скоростью почти 1500 об/мин без нагрузки и 900 об/мин при полной нагрузке при питании от трехфазной сети частотой 50 Гц. Какова соответствующая скорость поля ротора относительно ротора?
Трехфазный асинхронный двигатель работает со скоростью почти 1500 об/мин без нагрузки и 900 об/мин при полной нагрузке при питании от трехфазной сети частотой 50 Гц. Какова соответствующая скорость поля ротора относительно ротора?
a) 300 оборотов в минуту
b) 400 оборотов в минуту
c) 600 оборотов в минуту
d) 500 оборотов в минуту
Посмотреть ответ
Ответ: c
Пояснение: Частота питания = 50 Гц. Скорость двигателя без нагрузки = 1500 об/мин. Скорость двигателя при полной нагрузке = 900 об/мин. Поскольку скорость холостого хода двигателя составляет почти 1500 об/мин, следовательно, синхронная скорость близка к 1500 об/мин. Скорость роторного поля=1500 об/мин. Скорость роторного поля относительно ротора = 1500-900 = 600 об/мин.
11. Для практичного синхронного двигателя тяговый момент возникает, когда угол крутящего момента почти равен ________
a) 0°
b) 30°
c) 45°
d) 75°
View Answer
Ответ: d
Объяснение: В практическом синхронном двигателе сопротивлением якоря нельзя пренебречь, поэтому происходит вырыв при дельта=бета, который является углом импеданса и практически равен 75°.
12. Рассчитайте активную мощность резистора сопротивлением 8 Ом при протекании через него тока силой 8 А.
a) 512 Вт
b) 514 Вт
c) 512 Вт
d) 518 Вт
Посмотреть ответ
Ответ: a
Пояснение: Резистор представляет собой линейный элемент. Он только поглощает реальную мощность и рассеивает ее в виде тепла. Напряжение и ток находятся в одной фазе в случае резистора, поэтому угол между V и I равен 90°. P = I 2 R = 8×8×8 = 512 Вт.
Sanfoundry Global Education & Learning Series – Electric Drives.
Чтобы попрактиковаться во всех областях электропривода, здесь представлен полный набор из более чем 1000 вопросов и ответов с несколькими вариантами ответов .
Следующие шаги:
- Получите бесплатную грамоту в области электроприводов
- Участие в конкурсе по сертификации электроприводов
- Станьте лучшим игроком в категории «Электроприводы»
- Пройти тест электропривода
- Практические тесты по главам: глава 1, 2, 3, 4, 5, 6, 7, 8, 9, 10
- Пробные тесты по главам: глава 1, 2, 3, 4, 5, 6, 7, 8, 9, 10
реклама
реклама
Подпишитесь на наши информационные бюллетени (тематические). Участвуйте в конкурсе сертификации Sanfoundry, чтобы получить бесплатный Сертификат отличия. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий!
Участвуйте в конкурсе сертификации Sanfoundry, чтобы получить бесплатный Сертификат отличия. Присоединяйтесь к нашим социальным сетям ниже и будьте в курсе последних конкурсов, видео, стажировок и вакансий!
Ютуб | Телеграмма | Линкедин | Инстаграм | Фейсбук | Твиттер | Пинтерест
Маниш Бходжасиа, ветеран технологий с более чем 20-летним стажем работы в Cisco и Wipro, является основателем и техническим директором компании Sanfoundry . Он живет в Бангалоре и занимается разработкой Linux Kernel, SAN Technologies, Advanced C, Data Structures & Alogrithms. Оставайтесь на связи с ним в LinkedIn.
Подпишитесь на его бесплатные мастер-классы на Youtube и технические обсуждения в Telegram SanfoundryClasses.
Repository@Nottingham Home
Репозиторий в Ноттингеме предназначен для демонстрации опубликованных результатов исследований университета в открытом доступе. По возможности рецензируемые документы, принятые к публикации, или готовые художественные произведения, представленные публично, будут доступны здесь в полном цифровом формате, а также будут даны гиперссылки на стандартные опубликованные версии. См. наши Политики для получения дополнительной информации.
По возможности рецензируемые документы, принятые к публикации, или готовые художественные произведения, представленные публично, будут доступны здесь в полном цифровом формате, а также будут даны гиперссылки на стандартные опубликованные версии. См. наши Политики для получения дополнительной информации.
Возможность проведения рандомизированного плацебо-контролируемого исследования по оценке того, предотвращают ли жирные кислоты омега-3 приступы подагры при начале лечения, снижающего уровень уратов (2022)
Журнальная статья
Абхишек, А., Фуллер, А., Накаферо, Г., Чжан, В., Дамблтон, Дж., Хоуки, К., … Доэрти, М. (в печати). Возможность проведения рандомизированного плацебо-контролируемого исследования по оценке того, предотвращают ли жирные кислоты омега-3 приступы подагры при начале лечения, снижающего уровень уратов.Успехи ревматологии на практике,
Покрытие L-DOPA для улучшения прочности фосфатного стекловолокна и улучшения поверхности раздела волокно/матрица (2022)
Журнальная статья
Тан, К., Радд, К.Д., Парсонс, А.Дж., Шармин, Н., и Ахмед, И. (2022). Покрытие L-DOPA улучшило прочность фосфатного стекловолокна и улучшило поверхность раздела волокно/матрица. Журнал механического поведения биомедицинских материалов, 136, статья 105480. https://doi.org/10.1016/j.jmbbm.2022.105480Сообщалось, что леводопа (L-DOPA) является многообещающим клеем для различных материалов. В этом исследовании мы использовали L-ДОФА в качестве межфазного агента для композитов фосфатное стекловолокно/поликапролактон (PGF/PCL) с целью улучшить межфазное.
.. Узнайте больше о покрытии L-DOPA, улучшающем прочность фосфатного стекловолокна и поверхность раздела волокно/матрица.
Электрокаталитическое выделение водорода на микро- и мезопористых кобальтовых металлоорганических каркасах (2022)
Журнальная статья
Икбал, Б., Лейборн, А., О’Ши, Дж. Н., Арджент, С. П., и Захир, М. (2022). Электрокаталитическое выделение водорода на микро- и мезопористых металлоорганических каркасах кобальта. Молекулярный катализ, 531, статья 112711. https://doi.org/10.1016/j.mcat.2022.112711Разработка устройств электролиза воды имеет решающее значение для устойчивого производства зеленого водородного топлива.
Однако медленная кинетика и высокое перенапряжение являются ключевыми недостатками для производства водорода во время реакции выделения водорода в полуэлементе… Узнайте больше об электрокаталитическом выделении водорода на микро- и мезопористых металлоорганических каркасах кобальта.
Эрадикация Helicobacter pylori для первичной профилактики кровотечения из пептической язвы у пожилых пациентов, которым назначен аспирин (HEAT): рандомизированное плацебо-контролируемое исследование в первичной медико-санитарной помощи (2022)
Журнальная статья
Хоки, С. Дж., Эйвери, А. Дж., Купленд, С. А. С., Крукс, С.Дж., Дамблтон, Дж. С., Хоббс, Ф. Д. Р., … Стивенсон, Д. (в печати). Эрадикация Helicobacter pylori для первичной профилактики кровотечения из пептической язвы у пожилых пациентов, которым назначен аспирин (HEAT): рандомизированное плацебо-контролируемое исследование в первичной медико-санитарной помощи. Ланцет,
Изучите эти темы исследований
Расширенный поиск
Просто оставьте поля пустыми, если вы не хотите искать
Идентификатор репозитория Ноттингема
Заголовок
все из
Имя
Год
Ключевые слова
все из
Исследовательские центры/группы
0100 — Американские и канадские исследования0101 — Американские и канадские исследования0400 — Искусственная среда0500 — Химия0501 — Химия — Магазины0510 — Химия — Неорганическая0520 — Химия — Органическая0530 — Химия — Физическая0560 — Химия — CNL Carbon Neutral Lab0600 — Гражданская 070 Медицинская наука 0700 — Молекулярная наука1070 — Клиническая онкология0704 — Гематология0705 — Иммунология0707 — Микробиология0708 — Патология0711 — Молекулярная микробиология0712 — CETA0800 — Науки общественного здравоохранения0801 — Реабилитация и старение0802 — Отдел первичной медицинской помощи0804 — Науки общественного здравоохранения0805 — PRIMIS+0806 — Отдел поддержки исследований и разработок Trent0808 — 9CLAHRC0808 — 9CLAHRC0808- Психиатрия — Подразделение0810 — Психиатрия развития0811 — Нарушения обучаемости0812 — Психиатрия0813 — Психиатрия — Поведенческие науки0814 — Психиатрия — Коммунальное психическое здоровье0815 — Психофармакология0816 — Психиатрия пожилого возраста0817 — CHS — Q Research0818 — Отдел поддержки клинических испытаний (CTSU)0910 — Информатика традиционной китайской медицины — Информатика0920 — Институт информатики IT0930 — IMA0940 — Лаборатория компьютерного зрения0950 — ASAP0951 — MRL0960 — CIMI0961 — CIMI0970 — ADAC0990 — HORIZON Digital Economy Hub1100 — Экономика1200 — Education1202 — Образование — PDSO1210 — Образование — Программы бакалавриата1220 — Образование — Аспирантура — Преподается1230 — Образование — Аспирантура — Research2240 — Education — Research2250 — Education — SCITT1260 — Education — PGCE1270 — Education — PGCCE1290 — Educstion — EBITT1295 — Образование — Teach First1300 — Электротехника и электроника1400 — Английский язык2401 — Английский LiPP1450 — CELE1500 — География1501 — География — Программа управления окружающей средой1502 — Центр окружающей среды1503 — Центр исследований геохимии окружающей среды2601 — Департамент истории искусства1602 — History1700 — Клинические науки — Human Development1701 — Клинические науки — NURTURE1702 — Клинические науки — NURTURE — M Med Sci1703 — Клинические науки — Obs & Gynae — Derby1704 — Клинические науки — Obs & Gynae — City1705 — Клинические науки — Здоровье детей в Derby1706 — Клинические науки — Paeds Oncology1707 — Клинические науки — Paeds Oncology — Лаборатория Fndg1708 — Клинические науки — HD Центр регенеративной медицины 1800 — Гуманитарные науки 1801 — Археология 1802 — Классика 1803 — Музыка 1804 — Философия 1805 — Теология 1806 — Университетский музей 1807 — Foundation Arts 1808 — Классика и археология 1900 — Право1901 — Центр права в области прав человека2000 — Машиностроение, материалы и технология производства2100 — Бизнес-школа2102 — Бизнес-школа — MBA2103 — Институт WH&O2104 — Институт инноваций и предпринимательства2105 — Институт туризма и путешествий2106 — Школа современного китайского языка2107 — Центр корпоративного права Социальная ответственность2108 — Группа управления операциями2109 — Бизнес-школа — Executive Education2110 — Докторская степень в области клинической психологии2111 — Ноттингемский институт Конфуция2112 — Бизнес-школа — N. Lab2200 — Математические науки2210 — Теоретическая механика2220 — Статистика2230 — Чистая математика2240 — Математика Физика2300 — Клинические науки1 in2301 — Клинические науки — Acad Radiology2311 — Клинические науки — Cardio Medicine2312 — Клинические науки — Therapeutics & Mol Med2313 — Клинические науки — Клиническая неврология2314 — Клинические науки — WDDC2315 — Клинические науки — Dermatology2320 — Клинические науки — GI Surgery2321 — Клинические науки — Хирургия груди2322 — Клинические науки — Офтальмология2323 — Клинические науки — Оториноларингология2324 — Клинические науки — Отдел изучения рака2325 — Клинические науки — Сосудистая хирургия2330 — Клинические науки — Респираторная медицина2331 — Клинические науки — Медицина инсульта2332 — Клинические науки — Сосудистая медицина2333 — Клинические науки — Академическая ревматология2340 — Клинические науки — Анестезия и внутренняя помощь2341 — Клинические науки — Ортопедическая и неотложная хирургия2400 — CLAS Central2401 — Французский язык3402 — Немецкий язык2403 — Испанский, португальский и латиноамериканский языки2404 — Славяноведение2405 — Языковой центр2406 — Современные языки и культуры2408 — Культура, Медиа и визуальные исследования2500 — Науки о здоровье — Исследования по сестринскому делу2520 — Науки о здоровье — Дерби2524 — Науки о здоровье — Ноттингем2525 — Науки о здоровье — Ноттингем — Postreg2526 — Науки о здоровье — Физиотерапия2550 — Науки о здоровье — Акушерство2570 — Науки о здоровье — HQ2600 — Pharmacy2601 — CBS in Pharmacy2610 — Аптека — Преподавание2620 — Аптека — Исследования3630 — Аптека — Магазины2640 — Аптека — Исследование рака3650 — IPSET2700 — Физика и астрономия2701 — Центр визуализации сэра Питера Мэнсфилда2800 — Политика2850 — Методы и данные социальных наук2900 — Психология2901 — Педагогическая психология2910 — Психология — Мозг и тело3000 — Химическая и экологическая инженерия3100 — Социология и социальная политика3102 — Социальная работа3103 — Nottingham Policy Centre3150 — Ann Craft Trust3200 — Факультет MHS3200 — Факультет MHS3202 — MHS — Отдел биомедицинских услуг3203 — MHS — Stores3204 — Медицинское образование Unit3204 — Медицинское образование Unit3206 — PGDO Разовое финансирование декана3207 — PGDO — Периодическое финансирование WDC3209 — Факультет MHS — PGME Central3210 — Центр клинических навыков3210 — Центр клинических навыков3212 — PGDO — Разовое финансирование WDC3213 — PGDO — Контракт — Первичный Care Section3213 — PGDO — Contract — Primary Care Section3214 — MEU — Contract — Primary Care Section3214 — MEU Contract — Primary Care Section3215 — Center for Biomedical Sciences3215 — Center for Biomedicular Sciences3217 — Interprofessional Learning Unit3217 — Interprofessional Learning Unit3218 — Clinical Research Facility3218 — Clinical Research Объект3219- Факультетская исследовательская группа 3220 — Группа клинических испытаний 3220 — Группа клинических испытаний 3221 — Центр глубокого секвенирования 3221 — Центр глубокого секвенирования 3222 — Поступательная визуализация 3222 — Операционные затраты на трансляционную визуализацию 3223 — Медицина и здоровье для поступающих в аспирантуру4401 — Отделение хирургии груди 3500 — Бионауки 3501 — Бионауки — Службы поддержки 3510 — Науки о животных 3520 — Науки о продуктах питания 3530 — Науки о питании 3540 — Науки о растениях и растениеводстве 3541 — Геномика зерновых культур 3550 — Науки о сельском хозяйстве и окружающей среде 3560 — MAFF — Экономика сельского хозяйства 3570 — NASC (Arabidopsis) 3580 — BRU — Central3581 — Оранжереи3582 — CPIB3593 — Ферма 3594 — Национальный центр молочных исследований 4600 — Школа наук о жизни — Центр 3601 — Науки о жизни — Медицинские магазины 3602 — Центр исследований синтетической биологии 3800 — Ветеринарные науки 4000 — Факультет искусств 4010 — Центр перспективных исследований (CAS) 4100 — Право и социальные науки 4101 — Институт для науки и общества4105 — Институт методов и данных4210 — Культура, кино и медиа4500 — Инженерный факультет4510 — Мастерские инженерного факультета4700 — Научно-исследовательский институт обучения4800 — Школа медицины — Центр4801 — Детское здоровье, акушерство и гинекология4802 — Клиническая неврология4803 — Эпидемиология и общественное здравоохранение5804 — Рак и стволовые клетки4805 — Первичная медико-санитарная помощь4806 — Психиатрия и прикладная психология4807 — Реабилитация и старение4808 — Респираторная медицина4809- Ревматология, ортопедия и дерматология4810 — Медицинские науки и аспирантура в области медицины4811 — Ноттингемский центр болезней пищеварительного тракта4812 — PRIMIS4813 — Служба дизайна исследований для Ист-Мидлендса4814 — CLAHRC4815 — Q Research5816 — Отдел клинических испытаний4817 — Институт исследований слуха5818 — Отдел медицинского образования4819 — Клинические навыки и взаимопомощь -профессиональное обучение 4820 — Центр передового опыта в области терапевтических антител 4821 — Центр клинических исследований 4822 — Радиологические и визуализирующие науки 4823 — EMAHSN4981 — Future Foods Research Beacon4982 — Rights Lab Research Beacon5000 — IS — Central5020 — IS — Library Central6000 — CFO Central6200 — REGS6201 — REGS (группа стратегии исследований) 6202 — REGS (управление исследованиями) 6212 — BEIS (коммерциализация) 6213 — REGS (исследования Контракты) 6214 — BEIS6216 — REGS (исследовательские разработки) 6217 — REGS (исследовательские операции) 6218 — BEIS (группа партнерства) 6219 — BEIS (передача знаний) 6221 — BEIS (Азиатский бизнес-центр) 6222 — REGS (результаты исследований) 6271 — R&I — Взаимодействие и партнерство6600 — Коммерческие услуги6900 — Финансовый менеджмент6901 — Финансовый менеджмент (Трансформация)6902 — Финансовый менеджмент (Корпоративные услуги)6903 — Финансовый менеджмент (Коммерческие финансы MHS)6904 — Финансовый менеджмент (Коммерческие финансы A, SS, S, E)6905 — Финансовый менеджмент (Коммерческие финансы) 8010 — ER — Communications & Advocacy8500 — Офис вице-канцлера8519 — Поддержка PVCКитайский кампусФакультет искусствФакультет искусств (центральный)Инженерный факультетИнженерный факультетMHS — ЦентральныйФакультет медицины и здравоохраненияФакультет естественных наукФакультет социальных наукФакультет социальных наук — ЦентральныйФинансовый менеджментФинансы и бизнес ServicesInformation ServicesInformation ServicesLearning Science Research InstituteMalaysia CampsNottingham CampusNottingham University Business SchoolPVC SupportREGSШкола биологических наукШкола химииШкола компьютерных наукШкола современного китайского языкаШкола культур, языков и регионоведенияШкола экономикиШкола образованияШкола ol of EnglishШкола географииШкола медицинских наукШкола гуманитарных наукШкола праваШкола естественных наукШкола математических наукМедицинская школаФармацевтическая школаФизика и астрономияШкола политики и международных отношенийШкола психологииШкола социологии и социальной политикиШкола ветеринарной медицины и естественных наукУниверситет Ноттингема
Lab2200 — Математические науки2210 — Теоретическая механика2220 — Статистика2230 — Чистая математика2240 — Математика Физика2300 — Клинические науки1 in2301 — Клинические науки — Acad Radiology2311 — Клинические науки — Cardio Medicine2312 — Клинические науки — Therapeutics & Mol Med2313 — Клинические науки — Клиническая неврология2314 — Клинические науки — WDDC2315 — Клинические науки — Dermatology2320 — Клинические науки — GI Surgery2321 — Клинические науки — Хирургия груди2322 — Клинические науки — Офтальмология2323 — Клинические науки — Оториноларингология2324 — Клинические науки — Отдел изучения рака2325 — Клинические науки — Сосудистая хирургия2330 — Клинические науки — Респираторная медицина2331 — Клинические науки — Медицина инсульта2332 — Клинические науки — Сосудистая медицина2333 — Клинические науки — Академическая ревматология2340 — Клинические науки — Анестезия и внутренняя помощь2341 — Клинические науки — Ортопедическая и неотложная хирургия2400 — CLAS Central2401 — Французский язык3402 — Немецкий язык2403 — Испанский, португальский и латиноамериканский языки2404 — Славяноведение2405 — Языковой центр2406 — Современные языки и культуры2408 — Культура, Медиа и визуальные исследования2500 — Науки о здоровье — Исследования по сестринскому делу2520 — Науки о здоровье — Дерби2524 — Науки о здоровье — Ноттингем2525 — Науки о здоровье — Ноттингем — Postreg2526 — Науки о здоровье — Физиотерапия2550 — Науки о здоровье — Акушерство2570 — Науки о здоровье — HQ2600 — Pharmacy2601 — CBS in Pharmacy2610 — Аптека — Преподавание2620 — Аптека — Исследования3630 — Аптека — Магазины2640 — Аптека — Исследование рака3650 — IPSET2700 — Физика и астрономия2701 — Центр визуализации сэра Питера Мэнсфилда2800 — Политика2850 — Методы и данные социальных наук2900 — Психология2901 — Педагогическая психология2910 — Психология — Мозг и тело3000 — Химическая и экологическая инженерия3100 — Социология и социальная политика3102 — Социальная работа3103 — Nottingham Policy Centre3150 — Ann Craft Trust3200 — Факультет MHS3200 — Факультет MHS3202 — MHS — Отдел биомедицинских услуг3203 — MHS — Stores3204 — Медицинское образование Unit3204 — Медицинское образование Unit3206 — PGDO Разовое финансирование декана3207 — PGDO — Периодическое финансирование WDC3209 — Факультет MHS — PGME Central3210 — Центр клинических навыков3210 — Центр клинических навыков3212 — PGDO — Разовое финансирование WDC3213 — PGDO — Контракт — Первичный Care Section3213 — PGDO — Contract — Primary Care Section3214 — MEU — Contract — Primary Care Section3214 — MEU Contract — Primary Care Section3215 — Center for Biomedical Sciences3215 — Center for Biomedicular Sciences3217 — Interprofessional Learning Unit3217 — Interprofessional Learning Unit3218 — Clinical Research Facility3218 — Clinical Research Объект3219- Факультетская исследовательская группа 3220 — Группа клинических испытаний 3220 — Группа клинических испытаний 3221 — Центр глубокого секвенирования 3221 — Центр глубокого секвенирования 3222 — Поступательная визуализация 3222 — Операционные затраты на трансляционную визуализацию 3223 — Медицина и здоровье для поступающих в аспирантуру4401 — Отделение хирургии груди 3500 — Бионауки 3501 — Бионауки — Службы поддержки 3510 — Науки о животных 3520 — Науки о продуктах питания 3530 — Науки о питании 3540 — Науки о растениях и растениеводстве 3541 — Геномика зерновых культур 3550 — Науки о сельском хозяйстве и окружающей среде 3560 — MAFF — Экономика сельского хозяйства 3570 — NASC (Arabidopsis) 3580 — BRU — Central3581 — Оранжереи3582 — CPIB3593 — Ферма 3594 — Национальный центр молочных исследований 4600 — Школа наук о жизни — Центр 3601 — Науки о жизни — Медицинские магазины 3602 — Центр исследований синтетической биологии 3800 — Ветеринарные науки 4000 — Факультет искусств 4010 — Центр перспективных исследований (CAS) 4100 — Право и социальные науки 4101 — Институт для науки и общества4105 — Институт методов и данных4210 — Культура, кино и медиа4500 — Инженерный факультет4510 — Мастерские инженерного факультета4700 — Научно-исследовательский институт обучения4800 — Школа медицины — Центр4801 — Детское здоровье, акушерство и гинекология4802 — Клиническая неврология4803 — Эпидемиология и общественное здравоохранение5804 — Рак и стволовые клетки4805 — Первичная медико-санитарная помощь4806 — Психиатрия и прикладная психология4807 — Реабилитация и старение4808 — Респираторная медицина4809- Ревматология, ортопедия и дерматология4810 — Медицинские науки и аспирантура в области медицины4811 — Ноттингемский центр болезней пищеварительного тракта4812 — PRIMIS4813 — Служба дизайна исследований для Ист-Мидлендса4814 — CLAHRC4815 — Q Research5816 — Отдел клинических испытаний4817 — Институт исследований слуха5818 — Отдел медицинского образования4819 — Клинические навыки и взаимопомощь -профессиональное обучение 4820 — Центр передового опыта в области терапевтических антител 4821 — Центр клинических исследований 4822 — Радиологические и визуализирующие науки 4823 — EMAHSN4981 — Future Foods Research Beacon4982 — Rights Lab Research Beacon5000 — IS — Central5020 — IS — Library Central6000 — CFO Central6200 — REGS6201 — REGS (группа стратегии исследований) 6202 — REGS (управление исследованиями) 6212 — BEIS (коммерциализация) 6213 — REGS (исследования Контракты) 6214 — BEIS6216 — REGS (исследовательские разработки) 6217 — REGS (исследовательские операции) 6218 — BEIS (группа партнерства) 6219 — BEIS (передача знаний) 6221 — BEIS (Азиатский бизнес-центр) 6222 — REGS (результаты исследований) 6271 — R&I — Взаимодействие и партнерство6600 — Коммерческие услуги6900 — Финансовый менеджмент6901 — Финансовый менеджмент (Трансформация)6902 — Финансовый менеджмент (Корпоративные услуги)6903 — Финансовый менеджмент (Коммерческие финансы MHS)6904 — Финансовый менеджмент (Коммерческие финансы A, SS, S, E)6905 — Финансовый менеджмент (Коммерческие финансы) 8010 — ER — Communications & Advocacy8500 — Офис вице-канцлера8519 — Поддержка PVCКитайский кампусФакультет искусствФакультет искусств (центральный)Инженерный факультетИнженерный факультетMHS — ЦентральныйФакультет медицины и здравоохраненияФакультет естественных наукФакультет социальных наукФакультет социальных наук — ЦентральныйФинансовый менеджментФинансы и бизнес ServicesInformation ServicesInformation ServicesLearning Science Research InstituteMalaysia CampsNottingham CampusNottingham University Business SchoolPVC SupportREGSШкола биологических наукШкола химииШкола компьютерных наукШкола современного китайского языкаШкола культур, языков и регионоведенияШкола экономикиШкола образованияШкола ol of EnglishШкола географииШкола медицинских наукШкола гуманитарных наукШкола праваШкола естественных наукШкола математических наукМедицинская школаФармацевтическая школаФизика и астрономияШкола политики и международных отношенийШкола психологииШкола социологии и социальной политикиШкола ветеринарной медицины и естественных наукУниверситет Ноттингема
Тип
КнигаКнига ГлаваМатериалы конференцииНабор данныхЦифровой артефактВыставка/ПерформансЖурнальная статьяДругоеПатентФизический артефактПрезентация/КонференцияОтчетТезисРабочий документ
Статус публикации
ОтправленоПринятоВ прессеОпубликованоНеопубликовано
Название журнала или публикации
все из
Заказать результаты
По последнему изменению (сначала самые последние) По последнему изменению (сначала самые старые) По году (сначала самые новые) По году (сначала самые старые) По названию
23.
 Синхронная машина — преобразование электроэнергии EE2E11
Синхронная машина — преобразование электроэнергии EE2E11 В этой лекции мы изучим устройство и принцип работы синхронной машины. Статор синхронной машины имеет трехфазную обмотку переменного тока, которую также называют обмоткой якоря. Ротор имеет либо обмотку возбуждения, питаемую постоянным током, либо постоянные магниты для создания магнитного поля.
Прослушав лекцию, мы сможем рассказать о конструкции и принципах работы синхронной машины. Мы должны уметь применять эквивалентную схему для решения задач и понимать, что такое угол мощности, и использовать его для расчетов.
23.1. Принцип работы синхронной машины
Начнем с принципа работы синхронной машины.
Если на роторе установлены магниты, при вращении ротора в воздушном зазоре синхронной машины будет создаваться вращающееся магнитное поле.
Как мы изучали в прошлой лекции, в трехфазной обмотке будут индуцироваться симметричные трехфазные напряжения, если три фазы сдвинуты друг к другу на 120 градусов.
Предполагая, что ротор вращается против часовой стрелки, а фаза в фазе также расположена в последовательности a-b-c, трехфазное наведенное напряжение можно описать как
\[\начать{разделить} \начать{выравнивать} e_a(t) &= E_m\sin(\omega t) \\ e_b(t) &= E_m\sin(\omega t-\frac{2\pi}{3}) \\ e_c(t) &= E_m\sin(\omega t+\frac{2\pi}{3}) \end{выравнивание} \end{split}\]
Из прошлой лекции, если количество витков каждой фазы \(N\), угловая скорость вращения \(\omega\), амплитуда плотности потока \(E_m\ ), радиус внутренней поверхности статора \(r\), то среднеквадратичное значение наведенного напряжения равно
\[ E = \frac{|E_m|}{\sqrt{2}} = \frac{2\omega NB_mlr}{\sqrt{2}}. \]
По-видимому, индуцированное напряжение пропорционально как плотности потока, так и угловой скорости вращения. Константа наведенного напряжения определяется как \(k_e\), поэтому
\[ E = k_e\omega B_m. \]
Таким образом, индуцированное напряжение можно контролировать, изменяя скорость вращения \(\omega\) и магнитное поле \(B_m\).
Индуцированное напряжение имеет ту же частоту, что и электрическая скорость ротора \(\omega_e = p\omega_m\), где \(p\) — число пар полюсов, \(\omega_m\) — механический угол ротора скорость. Ротор вращается на синхронная скорость , поэтому мы называем этот тип электрической машины синхронной машиной .
Если мы запитаем трехфазную обмотку трехфазными токами той же последовательности фаз и той же частоты, что и индуктивное напряжение, из трехфазной части этого курса, мы знаем, что будет получена постоянная передача мощности.
Если мы изучим магнитное поле внутри воздушного зазора, мы увидим, что вращающееся магнитное поле также будет генерироваться трехфазными токами статора, которые движутся с той же скоростью, что и магнитное поле, создаваемое обмоткой ротора.
23.2. Конструкция синхронной машины
Затем изучаем устройство синхронной машины.
Для трехфазной синхронной машины якорь статора всегда имеет трехфазную симметричную обмотку.
Со стороны ротора может быть несколько различных конструкций. В зависимости от того, как генерируется магнитное поле ротора, мы имеем
- Ротор с постоянными магнитами
-
Магнитное поле ротора создается постоянными магнитами, установленными на роторе.
- Ротор с обмоткой возбуждения
-
Магнитное поле ротора создается обмоткой возбуждения, установленной на роторе.
В зависимости от того, имеет ли ротор гладкую поверхность, имеем
- Неявноявный ротор
-
Воздушный зазор равномерный, т. е. ротор не имеет явно выраженных полюсов.
- Явновидный ротор
-
Ротор имеет явно выраженные полюса, вследствие чего воздушный зазор неравномерен.
Статор имеет трехфазную клемму для приема или передачи трехфазных токов.
Ток возбуждения в обмотке возбуждения должен быть постоянным.
Для подачи постоянного тока возбуждения на вращающуюся обмотку ротора используется щеточно-контактный механизм.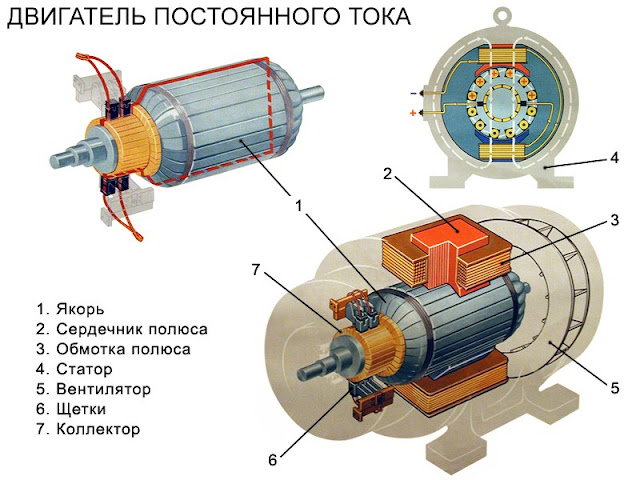 В правом нижнем углу слайда вы можете найти упрощенную схему синхронной машины.
В правом нижнем углу слайда вы можете найти упрощенную схему синхронной машины.
23.3. Пример
Здесь мы показываем несколько примеров практического применения синхронных машин.
Синхронные машины широко используются в электросетях. Здесь вы видите синхронную машину, используемую на электростанции, левая часть установки — машину возбуждения, которая используется для генерирования постоянного тока возбуждения для питания обмотки возбуждения. Из поперечного сечения видно, что синхронная машина является неявнонаправленной синхронной машиной. Обычно неявнонаправленные синхронные генераторы, используемые для электростанций, имеют 2 полюса и используются в высокоскоростных приложениях с высокой скоростью (3000 об / мин для 50 Гц), например, на тепловых электростанциях и атомных электростанциях. Первичными двигателями в этих приложениях обычно являются паровые турбины или газовые турбины.
Здесь показан ротор и конструкция синхронного генератора, используемого для тепловой электростанции.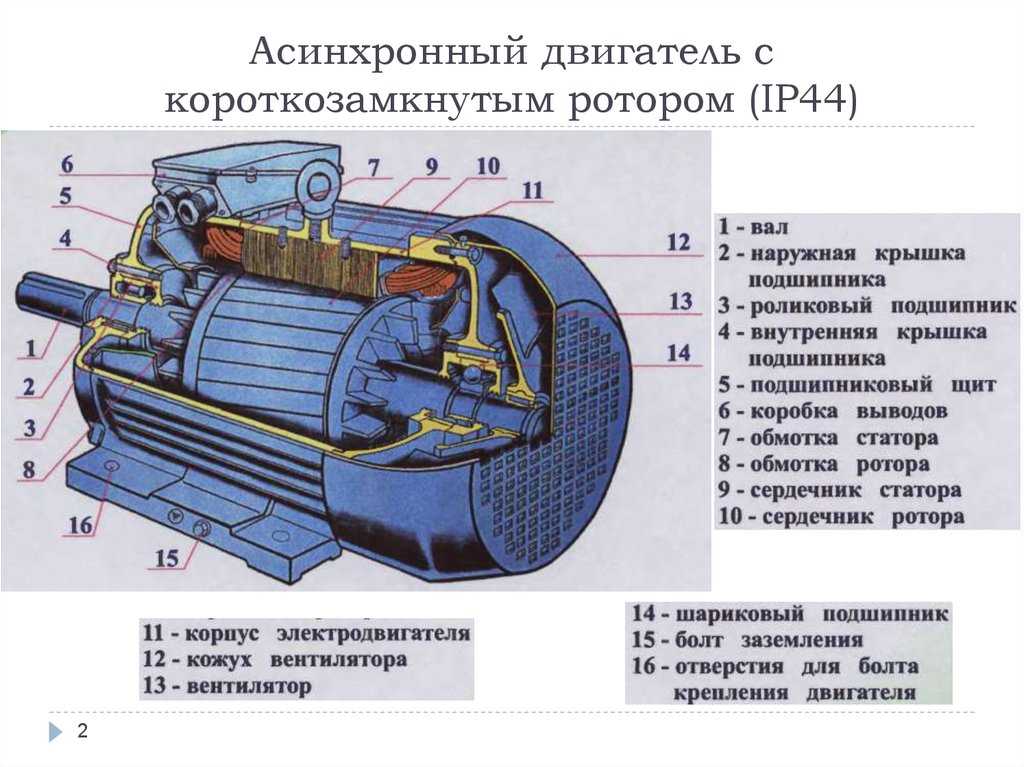
На фото показан момент установки синхронного генератора на гидроэлектростанции. Обычно на гидроэлектростанциях используются явнополюсные синхронные генераторы. Скорость вращения обычно низкая, а количество полюсов велико, поэтому на низкой скорости можно достичь 50 или 60 Гц.
Помимо производства электроэнергии, синхронные машины также используются в приложениях, требующих высокой мощности или высокой эффективности. Например, в современных сервоприводах и электромобилях широко используются синхронные машины с постоянными магнитами. Поскольку синхронному генератору с постоянными магнитами не требуется ток возбуждения для создания магнитного поля ротора, они могут обеспечить высокую эффективность, компактные размеры и улучшенную динамику.
23.4. Эквивалентная схема
Подобно машине постоянного тока, эквивалентная схема может использоваться для расчета производительности синхронной машины.
Если мы предположим, что индуцированные напряжения и токи трех фаз сбалансированы и симметричны, то мы можем просто рассчитать электрические характеристики для одной фазы. Затем можно рассчитать трехфазную мощность путем умножения однофазной мощности на три.
Поэтому для расчета производительности достаточно использовать однофазную эквивалентную схему.
Затем можно рассчитать трехфазную мощность путем умножения однофазной мощности на три.
Поэтому для расчета производительности достаточно использовать однофазную эквивалентную схему.
Внизу показана эквивалентная схема одной фазы. Эквивалентная схема здесь соответствует обозначению двигателя. Кроме того, мы предполагаем, что ротор не является явно выраженным, поэтому индуктивность фазы не изменяется при вращении ротора. Однофазное входное напряжение \(\mathbf{V}_{in}\) и фазное индуцированное напряжение \(\mathbf{E}\) являются векторами. Импеданс фазы помещается между ними, что должно быть комплексным импедансом, поскольку мы сейчас имеем дело с электрической цепью переменного тока. Здесь \(X_s\) также называется синхронное реактивное сопротивление .
23.5. Решение задач
Теперь воспользуемся эквивалентной схемой для решения нескольких задач.
В первом примере вычисляется частота по числу полюсов и скорости вращения ротора. Если количество полюсов равно \(P\), количество пар полюсов будет
.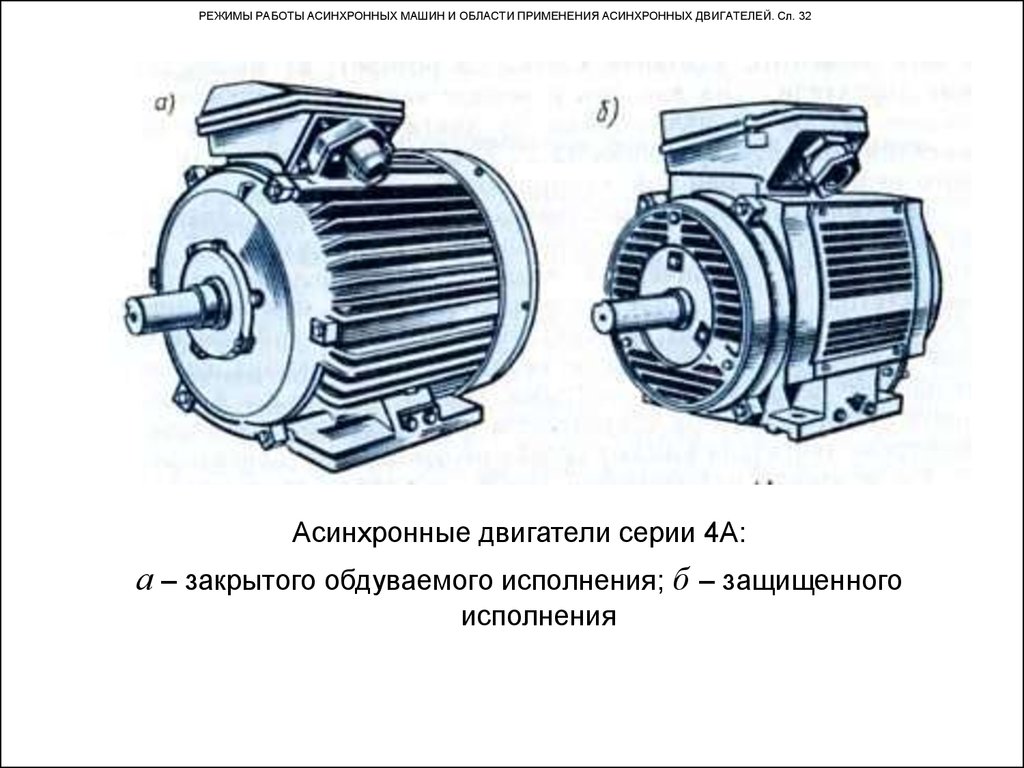 \[
р = \ гидроразрыв {P} {2}.
\]
\[
р = \ гидроразрыв {P} {2}.
\]
Согласно соотношению между электрическим углом \(\theta_e\) и механическим углом \(\theta\): \(\theta_e = p\theta\), имеем
\[ f = \frac{np}{60} = \frac{nP/2}{60}. \]
Наведенное напряжение пропорционально скорости или частоте, поэтому мы имеем
\[ \frac{E_{новый}}{E_{старый}} = \frac{n_{новый}}{n_{старый}} = \frac{f_{новый}}{f_{старый}}, \]
, если оставить ток возбуждения неизменным.
Второй пример — расчет коэффициента мощности и индуктивного напряжения на основе известной мощности, входного напряжения и импеданса фазы.
Сначала мы должны преобразовать линейное напряжение в линейное в фазное.
Поскольку машина подает мощность на механическую нагрузку, входная мощность равна
\[ P_{in} = P_{out} + P_{cu}, \]
где \(P_{cu}\) — потери в статоре, \(P_{out}\) — выходная мощность.
Поскольку использовалась эквивалентная схема для каждой фазы, здесь мы также преобразуем мощность в мощность для каждой фазы для расчета коэффициента мощности.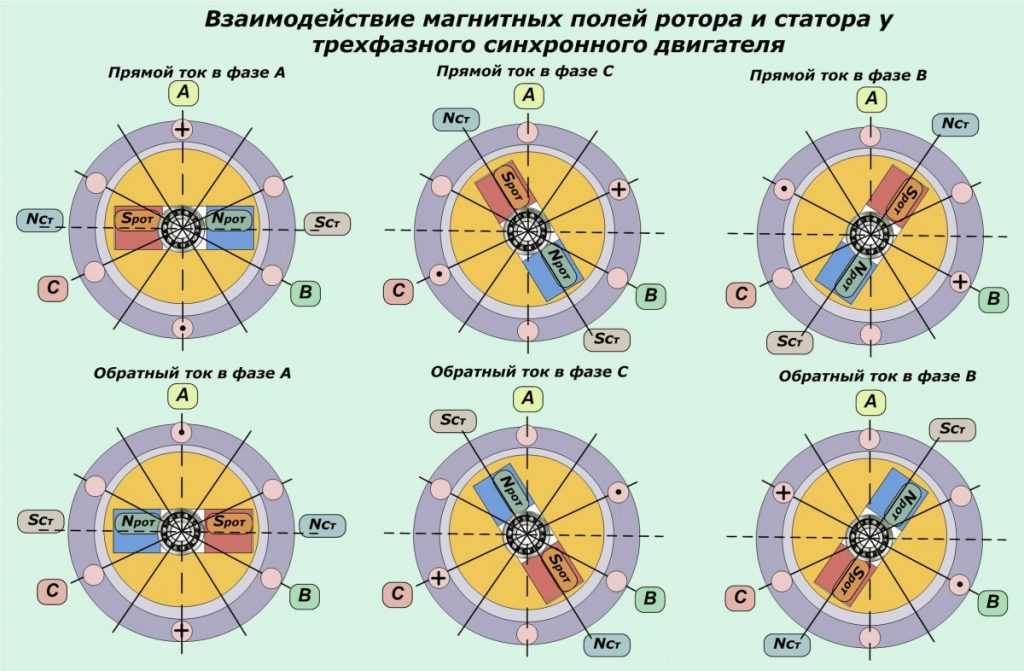
Зная коэффициент мощности \(\mathrm{pf} = \cos \phi\), мы можем получить комплексный ток как 92\фи}. \end{выравнивание} \end{split}\]
Здесь знак перед элементом синуса отрицательный, потому что коэффициент мощности отстает.
Затем из закона напряжения Кирхгофа получают фазное индуцированное напряжение,
\[ \mathbf{E} = \mathbf{V}_{in} — \mathbf{I}(r+jX_s). \]
Имейте в виду, что здесь используется обозначение двигателя.
Пример аналогичен предыдущему. Однако теперь мы должны следовать обозначениям генератора.
Сначала необходимо рассчитать фазный ток по мощности и коэффициенту мощности. Обратите внимание, что синхронная машина подключена треугольником, поэтому \(I_{line} = \sqrt{3} I_{\phi}\).
23.6. Домашнее задание
Мы можем применить эквивалентную схему для решения домашнего задания. Попробуйте решить ее самостоятельно и проверьте приведенный ниже сценарий, чтобы найти правильный ответ.
импортировать numpy как np импортировать cmath из дисплея импорта IPython.\circ$'.format(abs(E_phi), cmath.phase(E_phi)/ нп.пи*180))) # б). изменение коэффициента мощности pf_new = 0,9\circ$'.format(abs(E_phi), cmath.phase(E_phi)/np.pi*180))) # в). компенсация конденсатором # разница в реактивной мощности dQ = P_phi/pf*np.sqrt(1-pf**2) - P_phi/pf_new*np.sqrt(1-pf_new**2) # добавленная емкость C = dQ/(V_phi**2 * 2*np.pi*f) печать (ф'с). Добавлен конденсатор {C*1e6:.2f} мкФ.') # г). распечатать ('d). По сравнению с методом компенсации коэффициента мощности на основе конденсатора: синхронная машина имеет более высокие потери, более высокую стоимость и менее надежную вращающуюся часть, но может обеспечить бесступенчатую компенсацию. 9\circ\]
c). Добавлен конденсатор 127,93 мкФ. г). По сравнению с методом компенсации коэффициента мощности на основе конденсатора: синхронная машина имеет более высокие потери, более высокую стоимость и менее надежную вращающуюся часть, но может обеспечить бесступенчатую компенсацию.Синхронные двигатели и генераторы | Industry Today
Функция и использование синхронных двигателей.

В настоящее время имеется большой выбор синхронных двигателей и генераторов для широкого спектра промышленных применений. Электродвигатели стали неотъемлемой частью промышленного производства. Они преобразуют электрическую энергию в механическую, позволяя промышленным машинам выполнять возложенные на них задачи. Не все электродвигатели выполняют схожий набор задач, но некоторые из них специально разработаны для той или иной отрасли.
Применение в промышленности
Помимо множества различных функций, облегчаемых тщательно разработанными двигателями, задачи, выполняемые в промышленности, пожалуй, самые сложные. Некоторые электродвигатели используются при добыче угля, а некоторые двигатели обеспечивают энергию для дробления и измельчения в цементной промышленности. С другой стороны, для сталелитейных заводов требуется стабильный ввод для обеспечения непрерывности их производственного процесса в чрезвычайно теплой атмосфере. По этой причине они часто используют специальные двигатели для конвейерных лент.
Сахарная промышленность полагается на специализированные высоковольтные двигатели или двигатели высшего класса IE4, поскольку они могут обеспечивать более высокое напряжение, не требуя большого количества электроэнергии.
Применение в производственных машинах
Электродвигатели используются не только для питания полей и оборудования, но и для привода целого ряда производственных машин. Двигатели внизу — это те, которые приводят в движение пропеллер, включают турбину или всасывают дым и мусор в людных общественных или частных местах. В гидротехнических сооружениях именно электродвигатели помогают накачивать воду. Кроме того, существуют усовершенствованные трехфазные электродвигатели, которые используются в компрессорах, поскольку они могут достаточно охлаждаться и, таким образом, выдерживать более высокие температуры. Эти преимущества также делают их идеальным выбором для промышленных котлов.
В электрических системах, которые мы используем в промышленности, на электростанциях или в частных домах, двигатели и генераторы стали повседневным устройством.
В связи со спросом на системы с высокой энергоэффективностью и низким энергопотреблением можно наблюдать изобретение новых моделей этих электрических устройств. Основным расчетным фактором для надежной работы двигателей и генераторов является коэффициент мощности. Это отношение подаваемой мощности к требуемой мощности. Обычно общая мощность, потребляемая в промышленности и на заводах, рассчитывается на основе коэффициента мощности. Поэтому коэффициент мощности всегда должен поддерживаться на постоянном уровне. Однако из-за увеличения реактивной мощности в этих устройствах снижается коэффициент мощности. Введено множество методов для поддержания коэффициента мощности на постоянном уровне. Концепция синхронного двигателя является одной из них.
Синхронный двигатель: что это такое?
Вот как определяется синхронный двигатель: Двигатель переменного тока, в котором в стационарном состоянии вращение вала синхронно частоте приложенного тока.
Синхронный двигатель не работает с асинхронным током.
В отличие от асинхронных двигателей, эти двигатели имеют многофазные магниты переменного тока на статоре, которые создают вращающееся магнитное поле. В этом случае ротор имеет постоянный магнит, который синхронен с вращающимся магнитным полем и вращается синхронно с частотой подаваемого тока.
Функциональность синхронного двигателя
Работа синхронных двигателей основана на взаимодействии магнитного поля статора в сочетании с магнитным полем ротора. В статор включены трехфазные обмотки, работающие от трехфазного тока. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле. Ротор питается постоянным током.
Если нагрузка превышает аварийную нагрузку, двигатель десинхронизируется. Преимущество трехфазной обмотки статора заключается в том, что она определяет направление вращения. При однофазной обмотке нет необходимости определять направление вращения, и двигатель может запускаться в обоих направлениях. Пусковые устройства необходимы для управления направлением вращения этих синхронных двигателей.

Области применения синхронных двигателей
Синхронные двигатели обычно используются там, где требуется постоянная и точная скорость. Типичным применением этих маломощных двигателей являются позиционеры. Они также используются в приводах роботов. Синхронные двигатели также используются в шаровых мельницах, часах, проигрывателях и проигрывателях. Они также используются в качестве серводвигателей и синхронизаторов.
Такие двигатели доступны в диапазоне от размера подковы до промышленного размера с высокой производительностью. Хотя они используются в высокопроизводительных промышленных размерах, эти двигатели могут выполнять две основные функции. Один из них является эффективным средством преобразования энергии переменного тока в механическую энергию, а другой - корректором коэффициента мощности.
разница между серводвигателем и трехфазным синхронным двигателем
Добро пожаловать на EDAboard.com
Добро пожаловать на наш сайт! EDAboard.
com — это международный дискуссионный форум по электронике, посвященный программному обеспечению EDA, схемам, схемам, книгам, теории, документам, asic, pld, 8051, DSP, сети, радиочастотам, аналоговому дизайну, печатным платам, руководствам по обслуживанию... и многому другому. более! Для участия необходимо зарегистрироваться. Регистрация бесплатна. Нажмите здесь для регистрации.
Регистрация Авторизоваться
JavaScript отключен. Для лучшего опыта, пожалуйста, включите JavaScript в вашем браузере, прежде чем продолжить.
- Автор темы кольцо0
- Дата начала
- Статус
-
Закрыто для дальнейших ответов.
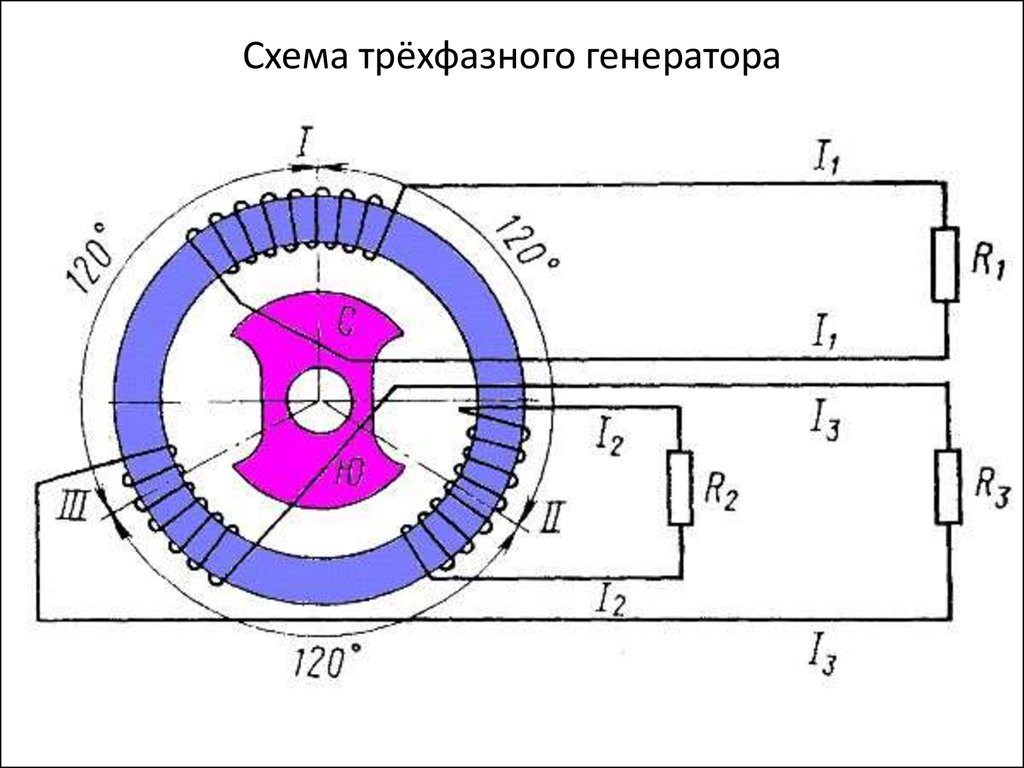
кольцо0
Членский уровень 3
Серводвигатель вопрос
У меня пока очень мало опыта работы с двигателями, поэтому вопрос может показаться глупым, но...
В чем разница между серводвигателем и обычным трехфазным синхронным двигателем? Я имею в виду, могу ли я управлять последним с помощью соответствующего частотного преобразователя и энкодера, как если бы это был сервопривод? А как быть с асинхронными двигателями?
сандервуд
Членский уровень 4
Серводвигатель вопрос
Привет,
Я думаю, что делает двигатель сервоприводом так, как вы им управляете (по замкнутому циклу). Поэтому в качестве серводвигателей могут использоваться трехфазные синхронные и асинхронные двигатели. Способы управления этими двумя типами двигателей различны из-за того, что в синхронных машинах поле либо постоянное (магниты), либо управляется независимо.
зеленый лес
Уровень новичка 4
Re: Вопрос о серводвигателе
ring0 сказал:
У меня пока очень мало опыта работы с двигателями, поэтому вопрос может показаться глупым, но...
чем отличается серводвигатель от обычного трехфазного синхронного двигателя? Я имею в виду, могу ли я управлять последним с помощью соответствующего частотного преобразователя и энкодера, как если бы это был сервопривод? А как быть с асинхронными двигателями?
Нажмите, чтобы развернуть...
Сервосистема представляет собой систему управления с замкнутым контуром, поэтому серводвигатели должны иметь энкодер или резольвер, тахометр или другие измерительные устройства.
Трехфазные синхронные двигатели имеют измерительные устройства, это серводвигатели.
3-фазные синхронные двигатели не имеют измерительных устройств, они не являются серводвигателями
кольцо0
Участник уровня 3
Re: разница между серводвигателем и трехфазным синхронным двигателем м
Спасибо, Сандервуд, я только что подумал о том же, но мне нужен был кто-то, кто это подтвердит.
Мистер Крутой
Расширенный член уровня 2
Re: разница между серводвигателем и трехфазным синхронным двигателем
да? Синхронные двигатели
также являются замкнутыми контурами. ваш ток должен быть синфазным с противо-ЭДС двигателя, иначе он не работает! правда, вам не нужно контролировать положение, регулируйте положение, если вы не хотите - это необязательно для синхронного двигателя. но вы определенно должны знать положение и, по крайней мере, направлять этот сигнал на вращающийся вектор вашего контроллера.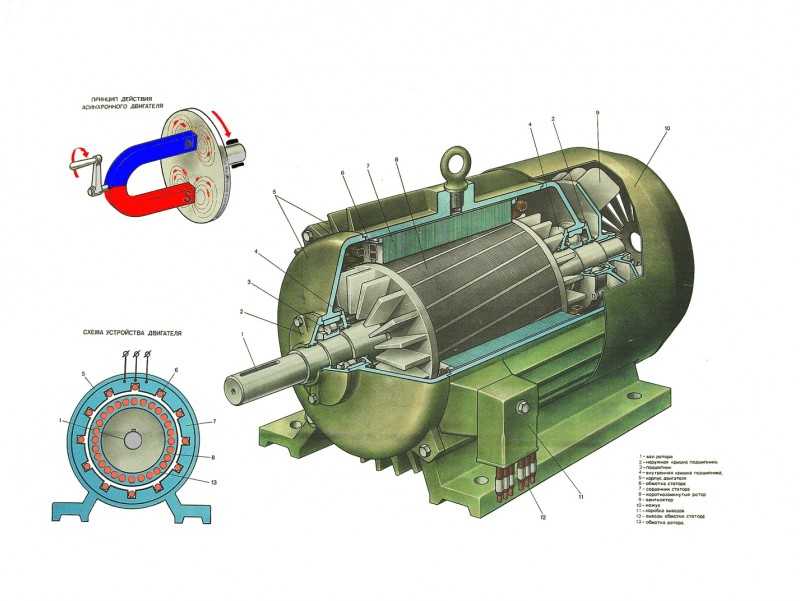 используйте его напрямую или регулируйте его, в обоих сценариях требуется обратная связь по положению (как минимум).
используйте его напрямую или регулируйте его, в обоих сценариях требуется обратная связь по положению (как минимум).
я думаю, что разница невелика... шаговый двигатель - это контроллер положения. это означает, что он поворачивается на определенное расстояние, а затем останавливается в определенном положении. поэтому упор (точность, воспроизводимость и т. д.) делается на контроль положения. эти двигатели обычно имеют более трех фаз, ну и что… вы просто копируете одно и то же оборудование X раз и учитываете это в своем алгоритме управления.
Синхронный двигатель предназначен для создания крутящего момента при непрерывном вращательном движении.
силовая электроника такая же, возможно только количество фаз другое. алгоритм управления имеет такую же топологию. например, вполне разумно иметь контур управления положением и на СИНХРОННОМ двигателе.. зависит от приложения, требуется ли такой уровень точности управления скоростью. да, есть и контур управления скоростью. .. но вам может понадобиться еще больше регулирования, поэтому вы добавляете контур положения. в чем разница между высокоточным синхронным двигателем и шаговым двигателем?
.. но вам может понадобиться еще больше регулирования, поэтому вы добавляете контур положения. в чем разница между высокоточным синхронным двигателем и шаговым двигателем?
Мистер Крутой
- Статус
- Закрыто для дальнейших ответов.
-
С
Совместимость серводвигателя и привода
- Автор CrabMan
- Ответов: 1
Форум робототехники и автоматизации
-
р
крутящий момент и скорость серводвигателя
- Автор Rajashri.Shevale
- Ответов: 2
Форум робототехники и автоматизации
-
А
некоторые основные вопросы о серводвигателях и шаговых двигателях
- Автор anan1975
- Ответов: 1
Форум робототехники и автоматизации
-
С
Проблема с трехфазным двигателем постоянного тока
- Автор shipra123
- Ответов: 1
Форум робототехники и автоматизации
-
М
Как устранить неполадки трехфазного серводвигателя переменного тока?
- Создан механиком Майком
