Как работает ШИМ-управление бесщеточными двигателями постоянного тока. Какие преимущества дает использование ШИМ. На что следует обратить внимание при выборе параметров ШИМ-сигнала. Каковы ограничения ШИМ-регулирования для бесщеточных двигателей.
Принцип работы бесщеточных двигателей постоянного тока
Бесщеточные двигатели постоянного тока (БДПТ) отличаются от коллекторных двигателей тем, что в них коммутация осуществляется не механически с помощью щеток, а электронным способом. Драйвер БДПТ состоит из 6 электронных ключей (обычно транзисторов), образующих трехфазный Н-мост. Это позволяет управлять тремя фазами двигателя, последовательно включая и выключая их в зависимости от положения ротора относительно статора.
Способы регулирования мощности двигателей постоянного тока
Существует два основных способа регулирования мощности двигателей постоянного тока:
- Линейные драйверы — изменяют напряжение или ток плавно, но имеют большие потери мощности
- Импульсные драйверы — модулируют напряжение и ток путем быстрого включения/выключения силовых транзисторов
Импульсные драйверы более энергоэффективны, меньше нагреваются и компактнее. Чаще всего в них используется метод широтно-импульсной модуляции (ШИМ).
Принцип работы ШИМ-регулирования
ШИМ заключается в изменении скважности (отношения длительности импульса к периоду) импульсов при фиксированной частоте. Чем больше скважность, тем выше среднее напряжение, подаваемое на двигатель. Преимущества ШИМ:
- Высокий КПД за счет ключевого режима работы транзисторов
- Простота реализации
- Фиксированная частота переключения, облегчающая фильтрацию помех
Влияние индуктивности обмоток двигателя
Обмотки двигателя обладают индуктивностью, которая препятствует быстрому изменению тока. При подаче напряжения ток нарастает экспоненциально с постоянной времени τ = L/R, где L — индуктивность, R — сопротивление обмотки. Аналогично при снятии напряжения ток спадает экспоненциально.
Выбор частоты ШИМ
Частота ШИМ должна быть достаточно высокой, чтобы:
- Обеспечить плавную модуляцию тока
- Уложиться несколько периодов ШИМ за время одного шага коммутации двигателя
- Минимизировать пульсации момента
Типичные значения частоты ШИМ для БДПТ — от 20 кГц до 100 кГц. При этом электрическая постоянная времени двигателя обычно составляет сотни микросекунд, что позволяет току успевать реагировать на каждый цикл ШИМ.

Ограничения ШИМ-регулирования
При очень низких скважностях ШИМ (менее 5-10%) могут возникать проблемы:
- Недостаточная энергия импульса для преодоления ЭДС двигателя
- Нелинейность характеристики момент-ток
- Повышенные пульсации момента
Поэтому для БДПТ обычно устанавливают минимальную скважность ШИМ на уровне 5-10%.
Преимущества использования ШИМ для управления БДПТ
Применение ШИМ-регулирования для бесщеточных двигателей постоянного тока дает ряд важных преимуществ:
- Высокая энергоэффективность по сравнению с линейными регуляторами
- Широкий диапазон регулирования скорости и момента
- Простота реализации в микроконтроллерах
- Возможность точного управления током двигателя
- Снижение акустического шума на высоких частотах ШИМ
Особенности применения ШИМ для различных типов БДПТ
При выборе параметров ШИМ необходимо учитывать особенности конкретного типа бесщеточного двигателя:
- Для высокоскоростных двигателей требуется более высокая частота ШИМ
- Двигатели с низкой индуктивностью обмоток требуют повышенной частоты ШИМ
- Для двигателей с датчиками Холла частота ШИМ должна быть согласована с частотой опроса датчиков
- В синусоидальных БДПТ ШИМ может использоваться для формирования синусоидального тока
Заключение
ШИМ-регулирование является эффективным методом управления бесщеточными двигателями постоянного тока. При правильном выборе параметров ШИМ-сигнала обеспечивается высокая энергоэффективность, широкий диапазон регулирования и низкий уровень пульсаций момента. Однако необходимо учитывать ограничения метода и особенности конкретных типов двигателей для достижения оптимальных характеристик привода.
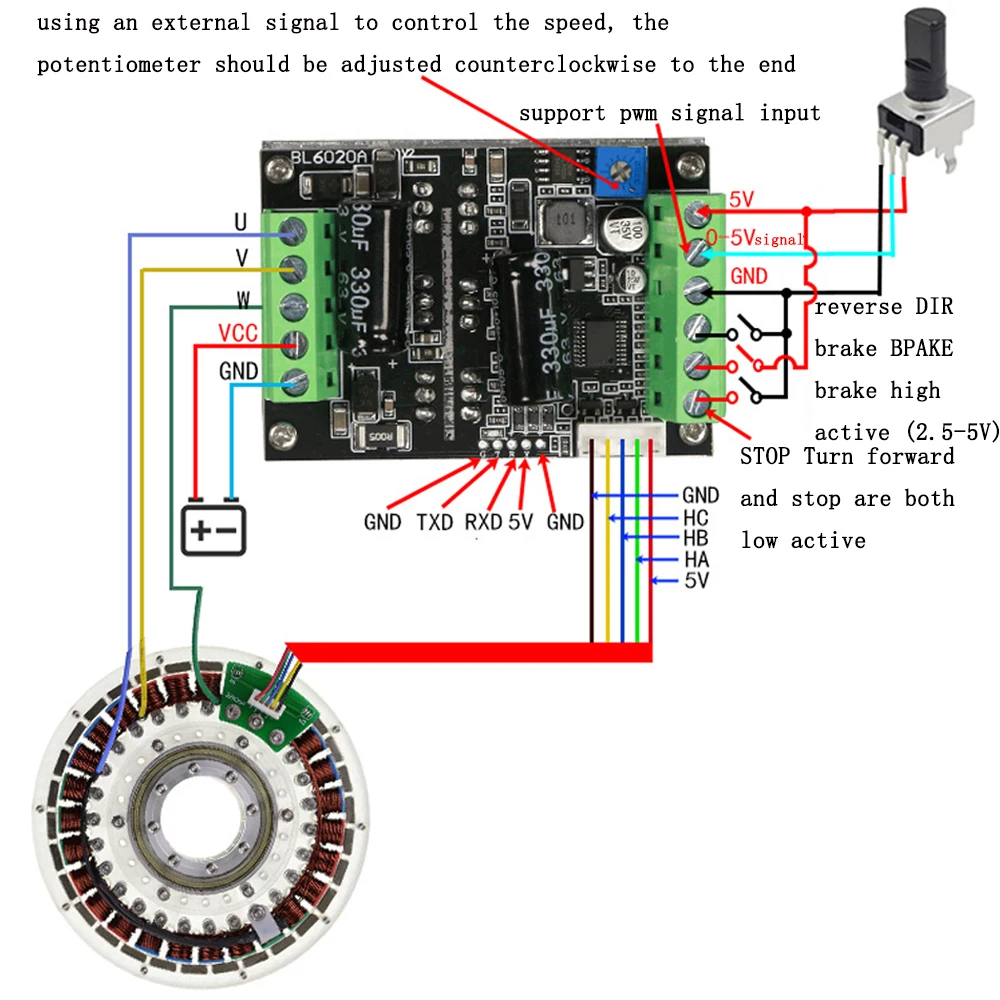
SALUS PCSOL201 PWM контроллер солнечных коллекторов
Настоящая Политика конфиденциальности является составной частью Пользовательского соглашения Сайта и действует в отношении всей информации, в том числе персональных данных Пользователя, получаемых Администрацией Сайта в процессе работы Пользователя с Сайтом, исполнения Пользовательского соглашения и соглашений между Администрацией сайта и Пользователем. Использование Сайта означает безоговорочное согласие Пользователя с настоящей Политикой конфиденциальности и указанными в ней условиями обработки его персональных данных; в случае несогласия с этими условиями Пользователь должен воздержаться от использования Сайта.
Перед использованием Сайта Пользователю необходимо внимательно изучить настоящую Политику конфиденциальности.
1. ПЕРСОНАЛЬНЫЕ ДАННЫЕ
1.1. Предоставление в любой форме (регистрация на Сайте, осуществление заказов, подписка на рекламные рассылки и тд.) своих персональных данных Администрации сайта, Пользователь выражает согласие на обработку персональных данных Администрацией сайта в соответствии с Федеральным законом “О персональных данных” от 27. 07.2006 №152-ФЗ.
07.2006 №152-ФЗ.
1.2. Обработка персональных данных осуществляется в целях исполнения Пользовательского соглашения и иных соглашений между Администрацией сайта и Пользователем.
1.3. Обработка персональных данных производится исключительно на территории Российской Федерации, с соблюдением действующего законодательства Российской Федерации.
1.4. Согласие Пользователя на обработку его персональных данных дается Администрации сайта на срок исполнения обязательств между Пользователем и Администрацией сайта в рамках Пользовательского соглашения или других соглашений между Пользователем и Администрацией сайта.
1.5. В случае отзыва согласия на обработку персональных данных Пользователя, Пользователь уведомляет об этом Администрацию Сайта письменно или по электронной почте. После получения данного уведомления Администрация Сайта прекращает обработку персональных данных Пользователя и удаляет.
1.6. Сайт не имеет статуса оператора персональных данных. Персональные данные Пользователя не передаются каким-либо третьим лицам, за исключением случаев, прямо предусмотренных настоящей Политикой конфиденциальности.
2. МЕРЫ ПО ЗАЩИТЕ ПЕРСОНАЛЬНЫХ ДАННЫХ
2.1. В своей деятельности Администрация сайта руководствуется Федеральным законом “О персональных данных” от 27.07.2006 №152-ФЗ.
2.2. Администрация сайта принимает все разумные меры по защите персональных данных Пользователей и соблюдает права субъектов персональных данных, установленные действующим законодательством Российской Федерации.
2.3. Защита персональных данных Пользователя осуществляется с использованием физических, технических и административных мероприятий, нацеленных на предотвращение риска потери, неправильного использования, несанкционированного доступа, нарушения конфиденциальности и изменения данных. Меры обеспечения безопасности включают в себя межсетевую защиту и шифрование данных, контроль физического доступа к центрам обработки данных, а также контроль полномочий на доступ к данным.
3. ИЗМЕНЕНИЕ ПОЛИТИКИ КОНФИДЕНЦИАЛЬНОСТИ
3.1. Администрация сайта оставляет за собой право в одностороннем порядке вносить любые изменения в Политику конфиденциальности без предварительного уведомления Пользователя. Актуальный текст Политики конфиденциальности размещен на данной странице.
Актуальный текст Политики конфиденциальности размещен на данной странице.
Китай Прожектор ШИМ-управление БПЛА Прожектор Регулировка яркости Регулировка цвета Производитель и поставщик
Китай Прожектор ШИМ-управление БПЛА Прожектор Регулировка яркости Регулировка цвета Производитель и поставщик | ViewproUAVДобро пожаловать в торговый центр Viewpro UAV!
Мой список пожеланий 0 Предметы)
Вернуться в магазин за едой К кассе
SKU: # 001 — В Наличии
АМЕРИКАНСКИЙ ДОЛЛАР$
сравнить
запрос
Войдите, чтобы добавить пожеланий
Download as PDF
Подробности по продукту
Направляющий огонь бортового ночного прожектора ASL03
Встроенный переключатель, быстрый и простой в использовании
Направляющий свет прожектора имеет функцию включения
свет без дистанционного управления, что обеспечивает более
удобный способ для полевых приложений.
Когда канал дистанционного управления БПЛА ограничен, нужно только
получить доступ к сигналу управления углом,
Для ночных полетов с относительно фиксированным светом и
яркость, просто нажмите переключатель, прежде чем дрон взлетит, чтобы
включите свет и отрегулируйте цвет/яркость!
Корпус из алюминиевого сплава, отличная защита
Продукт имеет конструкцию из авиационного алюминиевого сплава с хорошим защитным эффектом, что дает вам больше спокойствия в сложных условиях.
Благодаря интеллектуальному контролю температуры и тепловым ребрам вентилятора большой площади из алюминиевого сплава он безопасен и стабилен, долговечен и надежен.
Высокоточное двухосное качание, 90-градусный контроль тангажа
Используйте цифровой рулевой механизм с высоким крутящим моментом 20 кг для управления направлением освещения, внутренний цельнометаллический зубчатый привод, хорошую производительность и долгий срок службы;
С помощью переключателя дистанционного управления можно изменить угол наклона освещения.
регулируемый, с высокой точностью управления, стабильностью и долговечностью.
Кол-во:
Покупатели также приобрели:
%OFF-
У вас нет товаров в корзине !!
- English
- Russian
- Gujarati
Что такое ШИМ и как он работает?
*Обновлено 3 октября 2019 г. *
*
Возможность управления скоростью вращения вентилятора и удовлетворение бесшумных вычислений не всегда присутствовали, когда речь шла о персональных компьютерах. Ранние компьютеры x86 не имели активного охлаждения, потому что выделялось мало тепла, вплоть до появления первых моделей 486. С того времени и до сих пор энергопотребление и тепловыделение компьютеров росли в геометрической прогрессии, как и их производительность.
Начиная с самых первых процессоров Pentium, заявленных с TDP 7 Вт, и вплоть до современного процессора AMD FX 9590 с номиналом 220 Вт, охлаждение также имело свой эволюционный путь. TDP расшифровывается как «Расчетная тепловая мощность» и представляет собой максимальное количество тепла, выделяемого процессором. Если вы наткнулись на аббревиатуру, которую не понимаете, загляните на нашу страницу «Глоссарий жидкостного охлаждения», и вы, возможно, найдете правильный ответ!
4-контактный разъем PWM может автоматически контролировать скорость ваших вентиляторов и насосов.
Ранние самодельные контроллеры вентиляторов использовали простой «вольтмод», выбирая 5, 7 или 12 В от классического разъема Molex. Затем последовало использование обычных резисторов для замедления вентиляторов, вентиляторов, оснащенных терморезисторами, различных потенциометров для ручного управления скоростью в широком диапазоне и т. д.
Но в настоящее время, если вы хотите контролировать скорость своих вентиляторов и , ШИМ-управление — это путь. Каждая основная материнская плата, выпускаемая сегодня с завода, оснащена как минимум одним 4-контактным разъемом ШИМ. Материнские платы высокого класса предлагают 4-6 или даже больше таких 4-контактных разъемов вентилятора/насоса, а система ШИМ является очень эффективным и интеллектуальным способом управления вентиляторами. Однако даже сегодня, спустя много лет после появления ШИМ в 2003 году, есть пользователи, которые до сих пор не знакомы с его преимуществами. И что еще хуже, есть серьезные компании, которые производят продвинутые и хорошо спроектированные вентиляторы со старомодными 3-контактными разъемами.
Поэтому мы объясним, что такое ШИМ на самом деле, как он управляет скоростью вращения вентиляторов и насосов, а также покажем вам пример профиля ШИМ в одном из программ, предоставляемых производителями материнских плат.
По количеству проводов — контактов, которые есть у вентилятора — можно выделить три основных типа соединений. Вентиляторы с двумя проводами имеют только плюс и минус (земля) и все. Второй тип имеет три провода; два для питания вентилятора и один, который несет так называемый «тах» или тахометрический сигнал (по-английски: провод, который дает показания текущей скорости вращения вентилятора). По этому третьему проводу посылается сигнал с определенной частотой, которая пропорциональна скорости вращения вентилятора, выраженной в RPM (оборотов в минуту). Третий тип вентиляторов, использующих четыре провода, — это вентиляторы с ШИМ, о них и пойдет речь в этой статье, наряду с помпами с ШИМ.
ШИМ (широтно-импульсная модуляция) или широтно-импульсная модуляция — широко распространенный термин в мире электротехники. Он имеет широкий спектр применения, например, в области телекоммуникаций, звукового оборудования, серводвигателей и т. д. Нас, энтузиастов, интересует применение ШИМ в регулировании напряжения. Если вы следили за нашей недавней статьей в блоге о MOSFET и VRM, вы знаете, о чем мы говорим. Некоторые из вас наверняка уже знают, по какому принципу работает широтно-импульсная модуляция (ШИМ), но тем не менее мы объясним, как она на самом деле управляет скоростью вращения вентилятора или помпы.
Он имеет широкий спектр применения, например, в области телекоммуникаций, звукового оборудования, серводвигателей и т. д. Нас, энтузиастов, интересует применение ШИМ в регулировании напряжения. Если вы следили за нашей недавней статьей в блоге о MOSFET и VRM, вы знаете, о чем мы говорим. Некоторые из вас наверняка уже знают, по какому принципу работает широтно-импульсная модуляция (ШИМ), но тем не менее мы объясним, как она на самом деле управляет скоростью вращения вентилятора или помпы.
Короче говоря, ШИМ работает как переключатель, который постоянно включается и выключается, тем самым регулируя мощность, которую получает двигатель вентилятора или насоса. Система ШИМ, которая используется для управления вентиляторами и насосами, работает с двигателем, получая либо +12 В (полная мощность), либо 0 В (без питания). Чтобы лучше понять, как это работает, взгляните на диаграмму ниже.
Итак, на двигатель подаются импульсы мощности. Представьте это так же, как если бы вы крутили колесо рукой.![]() Вы можете толкать колесо каждые 5 секунд с одинаковой силой, и оно будет продолжать вращаться. Вы также можете ускорить интервал, когда вы нажимаете на колесо; скажем, вы подталкиваете его каждые 3 секунды. В этом случае вы заметите, что колесо вращается немного быстрее, и почти так же, как работает широтно-импульсная модуляция. Скорость двигателя, т. е. вентилятора или насоса, определяется шириной ШИМ-сигнала — продолжительностью времени, в течение которого он включен.
Вы можете толкать колесо каждые 5 секунд с одинаковой силой, и оно будет продолжать вращаться. Вы также можете ускорить интервал, когда вы нажимаете на колесо; скажем, вы подталкиваете его каждые 3 секунды. В этом случае вы заметите, что колесо вращается немного быстрее, и почти так же, как работает широтно-импульсная модуляция. Скорость двигателя, т. е. вентилятора или насоса, определяется шириной ШИМ-сигнала — продолжительностью времени, в течение которого он включен.
Как видно из приведенной выше диаграммы, рабочий цикл 10 % дает всего несколько импульсов мощности в течение определенного периода времени, что означает, что двигатель будет вращаться медленно, а рабочий цикл 100 % означает, что вентилятор/насос будет работать с полная скорость, постоянно включенный.
Важно знать, что здесь не используется регулировка напряжения, а при использовании ШИМ-регулирования на двигатель постоянно подается 12 вольт. По этой причине 4-контактный разъем материнской платы следует использовать только для одного вентилятора или, в конечном итоге, для двух с помощью Y-разветвителя. Помпы с водяным охлаждением имеют значительно большее энергопотребление, поэтому питание в основном подключается к разъему molex, а два других провода тача и ШИМ подключаются к разъему материнской платы для ШИМ-управления и считывания скорости.
Помпы с водяным охлаждением имеют значительно большее энергопотребление, поэтому питание в основном подключается к разъему molex, а два других провода тача и ШИМ подключаются к разъему материнской платы для ШИМ-управления и считывания скорости.
Если ШИМ-сигнал отсутствует, почти все вентиляторы будут работать на 100% мощности, а большинство насосов, используемых в водяном охлаждении, будут работать на некоторой средней скорости. Это означает, что если вы хотите запустить насос на полную мощность, вам нужно подключить его к ШИМ-сигналу, который установлен на 100% рабочий цикл.
Вентиляторы более высокого качества имеют свои собственные специальные микросхемы драйверов ИС внутри ступицы двигателя, которые генерируют наклонный ШИМ-сигнал вместо плоского прямоугольного. Плоские прямоугольные сигналы имеют тенденцию создавать неприятные щелчки, когда вентилятор работает на низких скоростях. Внезапное повышение мощности при подаче на двигатель +12 вольт приводит к рывкам ротора, что в некоторых случаях создает щелкающий звук. Использование специальных интегральных схем обеспечивает более мягкое включение двигателя при каждом подаче импульса. Это не то, что вам действительно нужно знать, но здесь вы поймете, почему качественные вентиляторы PWM стоят немного дороже.
Использование специальных интегральных схем обеспечивает более мягкое включение двигателя при каждом подаче импульса. Это не то, что вам действительно нужно знать, но здесь вы поймете, почему качественные вентиляторы PWM стоят немного дороже.
Почему ШИМ так важен? Ну, почти все вентиляторы «умирают» при понижении напряжения ниже 5В, но с ШИМ-управлением вентиляторы могут достигать очень низких рабочих скоростей в 300-600 об/мин. Они не умирают буквально; они просто отключаются и перестают крутиться, и именно поэтому зачастую заявленный диапазон скоростей вращения вентилятора может быть достигнут только при использовании ШИМ-регулирования. На этих скоростях вентиляторы абсолютно бесшумны, а некоторые вентиляторы можно даже полностью отключить с помощью ШИМ-регулирования. Еще одна очень интересная особенность ШИМ-регулирования заключается в том, что вы можете использовать один ШИМ-сигнал для управления всеми вашими вентиляторами. Поскольку на вентиляторы постоянно подается 12 вольт, можно использовать специальные разветвители концентраторов вентиляторов, которые будут посылать один ШИМ-сигнал на все подключенные вентиляторы или даже помпы.-.jpg.b17b6a49410d76c90a124e80879d45dd.jpg) Таким образом, все ваши вентиляторы и насосы будут работать в гармонии.
Таким образом, все ваши вентиляторы и насосы будут работать в гармонии.
Давайте взглянем на некоторые программы, которые производители материнских плат предоставляют для регулирования ШИМ. Почти каждый производитель материнских плат очень серьезно относится к регулированию ШИМ, и поэтому у нас есть очень подробные настройки, что действительно хорошо. Все ваши компоненты, производящие шум, можно поддерживать на низких скоростях, и вы можете настроить кривую рабочего цикла ШИМ в соответствии с показаниями температуры. В приведенном выше примере Gigabyte EasyTune профиль ШИМ настроен на работу вентиляторов примерно на 55% скорости при температуре процессора 60°C или ниже. Когда температура достигает 70°C, вентиляторы ускоряются до 100% рабочего цикла. Простой и очень эффективный способ получить бесшумный компьютер, конечно, если у вас есть качественные PWM-вентиляторы и качественные PWM-насосы.
Все продукты EK, например, вентиляторы и насосы, имеют функцию PWM, и вам просто нужно найти следующий значок в нашем магазине! 🙂
Узнайте больше о продуктах EK
Посетите магазин EK
Просмотрите наши высокопроизводительные линейки продуктов Quantum, Lignum и Classic, комплекты и аксессуары.
Перейти в магазин EK
Сборные компьютеры Fluid Gaming
Не умеете делать своими руками? Ознакомьтесь с нашими сборными ПК с полным водяным охлаждением.
Посетите EK Fluid Gaming
Следуйте за нами
Обслуживание и поддержка
Варианты оплаты
Служба быстрой доставки
Спасибо!
Мы благодарим вас за то, что вы выбрали EK в качестве поставщика решений для охлаждения. EK стремится к совершенству во всех аспектах – от наших продуктов до наших услуг. Если по какой-либо причине вы не удовлетворены или вообще нуждаетесь в помощи, сообщите нам об этом.
Эдвард Кениг, основатель
Вентиляторы для жидкостного охлаждения: что вам нужно знать XForma MKII от Дерика Магнусена Прокрутите вверхПонимание эффекта ШИМ при управлении бесщеточным двигателем постоянного тока
Цели обучения
- Понимание коммутации бесщеточного двигателя постоянного тока.
- Обзор регулирования ШИМ для бесщеточных двигателей постоянного тока.
- Узнайте пределы ШИМ для бесколлекторных двигателей постоянного тока.
Разработчики систем управления движением часто сталкиваются с трудностями при выборе или разработке электроники, использующей широтно-импульсную модуляцию (ШИМ) для управления бесщеточными двигателями постоянного тока. Полезно помнить о некоторых основных физических явлениях, чтобы избежать непредвиденных проблем с производительностью. В этом документе приведены общие рекомендации по использованию ШИМ-драйвера с бесщеточным двигателем постоянного тока.
Рис. 1: Пример Н-моста трехфазного двигателя, состоящего из шести транзисторов и подключенного к трем фазам двигателя. Предоставлено: Portescap
Коммутация бесщеточного двигателя постоянного тока
В отличие от щеточных двигателей постоянного тока, в которых коммутация осуществляется механически щетками, бесщеточные двигатели постоянного тока коммутируются электронным способом. Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Это означает, что фазы двигателей включаются и выключаются последовательно в соответствии с относительным положением ротора по отношению к статору. Для трехфазного бесщеточного двигателя постоянного тока драйвер состоит из шести электронных переключателей (обычно транзисторов), обычно называемых трехфазным Н-мостом (см. рис. 1). Эта конфигурация позволяет использовать три двунаправленных выхода для питания трех фаз двигателя.
Рис. 2: Схематичное поперечное сечение запуска бесщелевого двигателя постоянного тока Шаг 3. Синяя область — это ротор с двухполюсным постоянным магнитом. Магнитное поле, создаваемое магнитом, показано синей стрелкой. Оранжевая область — трехфазная обмотка. Когда ток течет из фазы A в фазу C, он индуцирует магнитное поле, которое для упрощения представлено оранжевой стрелкой. Ротор будет вращаться, когда обе стрелки выровняются. Привод будет коммутировать фазы (вращая магнитное поле статора, оранжевая стрелка), чтобы поддерживать угол как можно ближе к 90 градусов между магнитными полями статора и ротора (максимальный создаваемый крутящий момент). Предоставлено: Portescap
Предоставлено: Portescap
Открытие и закрытие транзисторов в определенной последовательности активирует фазы двигателя для поддержания оптимальной ориентации магнитного поля, индуцируемого статором по отношению к магниту ротора (см. рис. 2, рис. 3 и рис. 4).
Рис. 3: Фазный ток и состояние датчика Холла с шестиступенчатой коммутацией. Предоставлено: Portescap
Двигатель может приводиться в действие широко используемой шестиступенчатой трапециевидной коммутацией (см. рис. 3) или может использоваться для достижения более совершенного векторного управления, также называемого поле-ориентированным управлением (FOC). , в зависимости от сложности электроники (см. рис. 4).
Рис. 4: Фазный ток при использовании усилителя на ВОК. Предоставлено: Portescap
Регулирование ШИМ для бесщеточных двигателей постоянного тока
В щеточном (см. рис. 5) или бесщеточном двигателе постоянного тока (см. рис. 6) рабочая точка (скорость и крутящий момент) приложения может варьироваться. Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то и другое, для достижения желаемого выходного сигнала движения.
Роль усилителя состоит в том, чтобы изменять напряжение питания или ток, или и то и другое, для достижения желаемого выходного сигнала движения.
Часто существует два разных способа изменения напряжения или тока:
- Линейные драйверы (или линейные усилители)
- Драйверы прерывателя (или линейные усилители).
Линейные усилители регулируют мощность, подаваемую на двигатель, путем изменения напряжения или тока. Мощность, которая не передается двигателю, рассеивается (потеря мощности, см. рис. 6). В результате для рассеивания мощности требуется большой радиатор, что увеличивает размер усилителя и затрудняет его интеграцию в приложение.
Усилитель-прерыватель модулирует напряжение (и ток) путем включения и выключения силовых транзисторов. Основным преимуществом является экономия энергии, когда транзистор выключен. Это помогает продлить срок службы батареи приложения, меньше нагревает электронику и позволяет уменьшить размер электроники. Большую часть времени в усилителях с прерывателем используется метод ШИМ.
Рисунок 5: Сравнение архитектуры управления движением между щеточным двигателем постоянного тока и бесщеточным двигателем постоянного тока. Предоставлено: Portescap
Метод ШИМ заключается в изменении рабочего цикла на фиксированной частоте (см. рис. 7) для регулировки напряжения или тока в пределах желаемого целевого значения. Обратите внимание, что одним из преимуществ метода ШИМ для прерывания тока по сравнению с другими методами является то, что частота переключения является фиксированным параметром. Это облегчает разработчикам электроники фильтрацию генерируемых акустических и электромагнитных помех.
Рис. 6: Пример линейного усилителя, питающего двигатель. Мощность, постоянно рассеиваемая драйвером для этой катушки двигателя, составляет: P_dissipated (усилитель) = (24 – 19) * 1 = 5 Вт Предоставлено: Portescap
двигатель — это полное напряжение шины. Когда транзистор открыт 50 % времени, среднее напряжение, подаваемое на двигатель, составляет половину напряжения на шине.![]() Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Когда транзистор закрыт 100% времени, на двигатель не подается напряжение.
Рисунок 7: Различные рабочие циклы ШИМ. Обратите внимание, что частота одинакова для всех случаев, тогда как среднее напряжение (пунктирная линия) пропорционально коэффициенту заполнения. Предоставлено: Portescap
Эффект индуктивности в бесщеточных двигателях постоянного тока
Двигатель постоянного тока характеризуется индуктивностью L, сопротивлением R и противоэлектродвижущей силой (противо-ЭДС) E, включенными последовательно. Обратная ЭДС представляет собой напряжение, вызванное магнитной индукцией (закон индукции Фарадея-Ленца), которое противодействует приложенному напряжению и пропорционально скорости двигателя. См. рис. 8, на котором показан двигатель при включенной и выключенной ШИМ.
Рисунок 8: Упрощенные эквивалентные схемы, представляющие двигатель постоянного тока, когда ШИМ включен (слева) и выключен (справа). Для простоты правая схема соответствует режиму медленного затухания (ток рециркулирует в двигателе).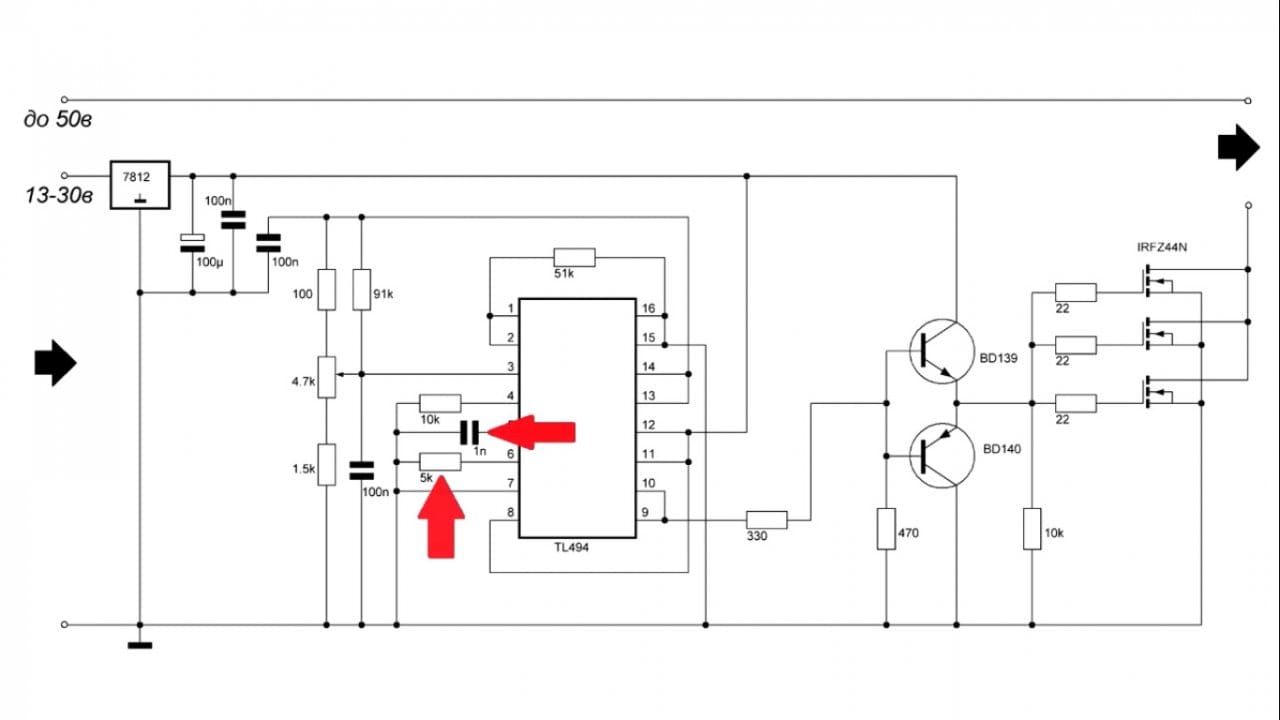 Предоставлено: Portescap
Предоставлено: Portescap
А пока, для простоты, давайте не будем рассматривать обратную ЭДС.
При подаче напряжения или отключении напряжения в цепи RL дроссель будет препятствовать изменению тока. При приложении напряжения U к цепи RL ток будет следовать экспоненциальному росту первого порядка, динамика которого зависит от электрической постоянной времени τ, равной отношению L/R (см. рис. 9).). Оно асимптотически достигнет стационарного значения, то есть 99,7% U/R, после 5-кратного увеличения постоянной времени.
Рис. 9: Экспоненциальный рост тока в цепи RL. Предоставлено: Portescap
Такое же экспоненциальное поведение будет наблюдаться при разрядке цепи RL. См. рис. 10.
На практике бесщеточные усилители постоянного тока имеют довольно высокую частоту ШИМ и не позволяют току достичь установившегося состояния. Эта частота обычно выше 50 кГц, поэтому ток можно правильно модулировать с достаточным количеством циклов, возникающих на каждом этапе коммутации. Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Для частоты ШИМ 50 кГц время цикла закрытия и открытия транзистора равно 20 мкс. Учитывая шестиступенчатую коммутацию, время одной коммутации для двигателя с одной полюсной парой, работающего со скоростью 40 000 об/мин (667 Гц), займет 250 мкс. Это позволит, по крайней мере, 250/20 = 12,5 циклов ШИМ в течение одного шага коммутации.
Рисунок 10: Экспоненциальное падение тока в цепи RL. Предоставлено: Portescap
Бесщеточные двигатели постоянного тока имеют электрическую постоянную времени τ, равную нескольким сотням микросекунд. Таким образом, у тока будет время среагировать во время каждого цикла ШИМ (см. рис. 11). Однако механическая постоянная времени находится в диапазоне нескольких миллисекунд, поэтому разница между механической и электрической постоянной времени составляет 10. Поэтому ротор самого двигателя не успеет среагировать при переключении напряжения на типичных частотах ШИМ. Низкие частоты ШИМ в несколько тысяч герц могут вызывать вибрации ротора и слышимый шум. Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Желательно выходить за пределы слышимого спектра, то есть как минимум выше 20 кГц.
Пределы ШИМ для бесколлекторных двигателей постоянного тока
ШИМ приводит к нарастанию и падению тока в каждом цикле. Разница между минимальным и максимальным значением тока называется пульсацией тока ∆ I (см. рисунок 11). Пульсации сильного тока могут быть проблематичными. Желательно, чтобы она была как можно ниже.
Рис. 11: Типичные пульсации тока, создаваемые ШИМ с частотой 50 кГц в установившемся режиме (рабочий цикл 80 %). Рабочий цикл одинаков в обоих случаях, поэтому средний ток одинаков. На графике слева показаны низкие пульсации тока. Среднеквадратичное значение тока близко к среднему значению тока. На графике справа показаны высокие пульсации тока. Среднеквадратичное значение тока значительно выше, чем среднее значение тока. Предоставлено: Portescap
Крутящий момент двигателя постоянного тока пропорционален среднему току, как показано в формуле:
Обратите внимание, что для крутящего момента двигателя необходимо учитывать средний ток I avg . Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рисунке 11, средний ток одинаков в обоих случаях (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
Средний ток зависит только от рабочего цикла и не зависит от пульсаций тока. Как видно на рисунке 11, средний ток одинаков в обоих случаях (одинаковый рабочий цикл), тогда как пульсации сильно различаются (разная электрическая постоянная времени).
В отличие от щеточных двигателей постоянного тока, бесщеточные двигатели постоянного тока не имеют щеток. Сильные пульсации тока не являются проблемой для самого срока службы. Пульсации тока будут иметь большое влияние на потери двигателя, вызывая ненужный нагрев. Пульсация тока приведет к двум типам потерь:
Потери в джоулях
Пульсации тока увеличат среднеквадратичное значение тока, которое является значением, учитываемым при расчете потерь в джоулях. Пульсации будут генерировать дополнительный нагрев без увеличения среднего тока и, следовательно, без увеличения крутящего момента. Обратите внимание, что это прямоугольная зависимость от среднеквадратичного значения тока.
Если T – период времени ШИМ, среднеквадратичное значение тока можно рассчитать по формуле:
Потери в стали
магнитное поле в проводящем материале будет индуцировать напряжение, которое затем будет генерировать циркулирующие токи, называемые вихревыми токами.
Потери на вихревые токи пропорциональны квадрату скорости двигателя и квадрату тока двигателя. Основываясь на практических измерениях, когда пульсации тока высоки, дополнительные потери в стали могут стать значительными. Важно, чтобы пульсации тока были как можно меньше.
Давайте определим формулу текущей пульсации, чтобы мы могли определить рекомендации по ее минимизации.
Из схемы двигателя (см. рис. 8) мы можем вывести уравнение двигателя:
Предположим, что изменение тока является линейным в течение коротких периодов времени T_ON и T_OFF. Следовательно, мы можем переписать дифференциальное уравнение следующим образом:
В предположении устойчивого состояния пульсации тока постоянны:
Таким образом, два уравнения можно объединить в одно:
Мы можем упростить уравнение, введя коэффициент заполнения D и частоту ШИМ f ШИМ:
Отсюда можно вывести формулу пульсаций тока ∆I:
Вариация пульсаций тока в зависимости от рабочего цикла ШИМ представляет собой параболу, как показано на рисунке 12.![]()
Рисунок 12: Пульсации тока в зависимости от рабочего цикла ШИМ. Предоставлено: Portescap
Максимальное значение пульсаций достигается при коэффициенте заполнения 50%, т.е. D=0,5:
Из уравнения 15, есть несколько параметров, влияющих на:
- Источник питания U ШИМ
- Рабочий цикл D
- Частота ШИМ f ШИМ 90 102
- Индуктивность Л.
Рекомендации к минимизация пульсаций тока в бесщеточных двигателях постоянного тока
Мы можем дать некоторые рекомендации по минимизации пульсаций:
Уменьшить или адаптировать напряжение питания
Пульсации тока пропорциональны напряжению питания. Наличие высокого напряжения питания может быть полезно для достижения экстремальных рабочих точек, требующих высокой скорости или большей мощности. Однако, если приложение не требует высокой скорости или мощности, более низкое напряжение питания будет полезно для уменьшения пульсаций тока. Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно удерживать рабочий цикл ШИМ как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Работа в той же точке нагрузки с более низким напряжением питания также увеличит рабочий цикл, что еще больше уменьшит пульсации тока. Важно удерживать рабочий цикл ШИМ как можно дальше от 50%, что является наихудшим случаем (рис. 12).
Увеличьте частоту ШИМ
Чем выше частота, тем короче время цикла ШИМ; следовательно, у тока будет меньше времени для роста. Для бесколлекторных двигателей постоянного тока рекомендуются частоты ШИМ не менее 50 кГц. Частоты ШИМ 80 кГц и более были бы даже более подходящими для двигателей с очень малой электрической постоянной времени.
Увеличение индуктивности
Бесщеточные двигатели постоянного тока имеют очень маленькое значение индуктивности. Рекомендуется добавить внешние индуктивности, так как они будут замедлять нарастание и падение тока, тем самым уменьшая пульсации тока. Кроме того, указанное значение индуктивности дано для частоты ШИМ 1 кГц. Поскольку индуктивность двигателя изменяется в зависимости от частоты ШИМ, при типичной частоте ШИМ 50 кГц индуктивность может уменьшиться до 70 % от указанного значения.
Рисунок 13: Бесщеточный двигатель с дополнительной индуктивностью. Предоставлено: Portescap
Хотя это решение решит текущую проблему с пульсациями, может быть непросто интегрировать дополнительные индуктивности, особенно когда пространство ограничено. Поэтому часто целесообразно сначала изучить два других варианта.
ШИМ имеет много преимуществ и является наиболее широко используемым решением для бесколлекторных драйверов постоянного тока. Установка соответствующего напряжения ШИМ и использование высокой частоты ШИМ поможет уменьшить пульсации и избежать использования дополнительных индуктивностей. Сегодняшняя стоимость электронных компонентов делает простым решением использование высокой частоты ШИМ. Разработчики электроники должны учитывать эти параметры при разработке системы управления движением, когда важны размер и вес электроники (например, портативные устройства со встроенной электроникой) или когда срок службы батареи является ключевым критерием (дополнительная энергия, рассеиваемая джоулевыми потерями на внутреннее сопротивление).
