Как работает тиристор в цепи переменного тока. Какие существуют схемы управления симистором. Как происходит включение тиристора и какие есть способы регулирования мощности на переменном токе.
Принцип работы тиристора в цепи переменного тока
Тиристор представляет собой полупроводниковый прибор, который может находиться в двух состояниях — открытом (проводящем) и закрытом (непроводящем). В цепи переменного тока тиристор работает следующим образом:
- В положительный полупериод при подаче управляющего сигнала тиристор открывается и пропускает ток
- В отрицательный полупериод тиристор закрывается и ток не проходит
- При переходе напряжения через ноль тиристор снова закрывается
- Открытие тиристора в следующий положительный полупериод возможно только при новой подаче управляющего сигнала
Таким образом, меняя момент подачи управляющего импульса, можно регулировать угол открытия тиристора и соответственно мощность, передаваемую в нагрузку.
Схемы управления симистором на переменном токе
Симистор представляет собой разновидность тиристора, способную проводить ток в обоих направлениях. Основные схемы управления симистором включают:
- Управление с помощью диака — диак открывает симистор при достижении напряжением определенного уровня
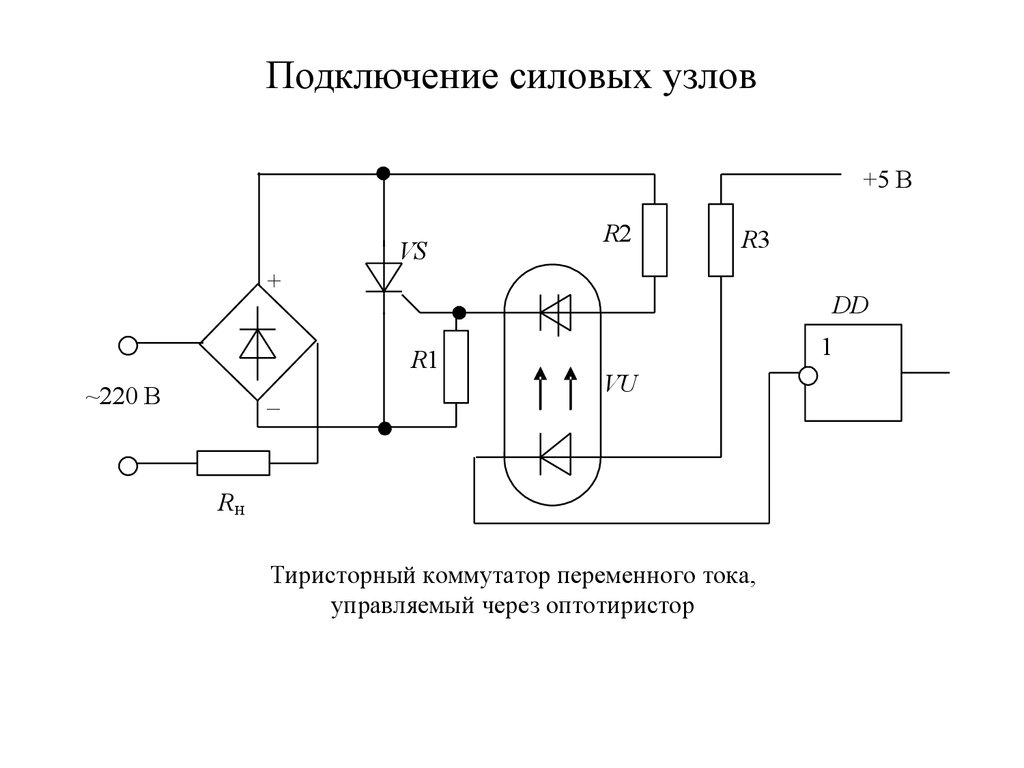
- Управление через оптопару — позволяет гальванически развязать цепь управления и силовую цепь
- Управление с помощью микроконтроллера — дает возможность точно задавать моменты открытия симистора
- Фазоимпульсное управление — открытие симистора происходит в определенные моменты синусоиды напряжения
Выбор конкретной схемы зависит от требуемой точности регулирования, мощности нагрузки и других факторов.
Способы включения тиристора в цепь переменного тока
Существует несколько основных способов включения тиристора в цепь переменного тока:
- Однополупериодная схема — тиристор включен последовательно с нагрузкой
- Двухполупериодная схема — используются два встречно-параллельно включенных тиристора
- Мостовая схема — тиристор включается в диагональ диодного моста
- Схема с симметричным тиристором (симистором)
Двухполупериодные и мостовые схемы позволяют более полно использовать мощность источника питания. Симисторные схемы наиболее просты в реализации.

Методы регулирования мощности на переменном токе
Для регулирования мощности, передаваемой в нагрузку на переменном токе, применяются следующие основные методы:
- Фазовое регулирование — изменение угла открытия тиристора/симистора
- Широтно-импульсная модуляция — включение/выключение нагрузки на высокой частоте
- Частотное регулирование — изменение частоты питающего напряжения
- Автотрансформаторное регулирование — изменение действующего значения напряжения
Наиболее распространенным является фазовое регулирование с помощью тиристоров/симисторов, позволяющее плавно и экономично изменять мощность в нагрузке.
Преимущества тиристорных регуляторов мощности
Использование тиристорных регуляторов для управления мощностью на переменном токе имеет ряд важных преимуществ:
- Высокий КПД — минимальные потери энергии при регулировании
- Бесконтактность — отсутствие механического износа
- Быстродействие — возможность управления в каждом периоде сети
- Широкий диапазон регулирования — от единиц до сотен киловатт
- Простота управления — возможность автоматизации
- Малые габариты и вес по сравнению с другими типами регуляторов
Эти преимущества обусловили широкое применение тиристорных регуляторов в промышленности и быту.

Области применения тиристорных регуляторов переменного тока
Тиристорные и симисторные регуляторы мощности на переменном токе используются в следующих основных областях:
- Регулирование яркости осветительных приборов
- Управление электронагревательными устройствами
- Регулирование скорости вращения электродвигателей
- Управление мощностью электросварочных аппаратов
- Стабилизация напряжения в электросетях
- Плавный пуск мощных электродвигателей
- Регулирование мощности в электропечах
Широкое распространение тиристорные регуляторы получили также в бытовой технике — диммерах, регуляторах мощности электроинструментов и т.д.
Схемотехника тиристорных регуляторов мощности
Типовая схема тиристорного регулятора мощности на переменном токе включает следующие основные функциональные узлы:
- Силовая часть — тиристор или симистор с элементами защиты
- Схема управления — формирователь управляющих импульсов
- Схема синхронизации с сетью
- Схема регулирования угла открытия тиристора
- Схема защиты от помех и перенапряжений
Конкретная реализация зависит от мощности, требуемой точности регулирования и других факторов. Современные регуляторы часто выполняются на базе микроконтроллеров.

Основные проблемы при использовании тиристорных регуляторов
При применении тиристорных регуляторов мощности на переменном токе могут возникать следующие проблемы:
- Генерация высших гармоник тока в сеть
- Снижение коэффициента мощности
- Создание радиопомех
- Возникновение перенапряжений при коммутации
- Сложность управления индуктивной нагрузкой
Для решения этих проблем применяются специальные схемотехнические решения — снабберные цепи, фильтры, схемы мягкой коммутации и др. При правильном проектировании большинство проблем успешно преодолевается.
|


 4).
4).
 ..22 Ом и светодиод оптосимистора или два соединенных последовательно светодиода оптотиристоров. Рис.7.
..22 Ом и светодиод оптосимистора или два соединенных последовательно светодиода оптотиристоров. Рис.7.


 com
comТиристор как элемент автоматики, его работа на постоянном и переменном токе. — Студопедия
Поделись
Тиристорявляется управляемым полупроводниковым прибором, который предназначен для бесконтактной коммутации электрических цепей. Принцип действия тиристора основан на физических явлениях в кристалле полупроводника (кремния), состоящем из слоёв с разными типами проводимости. Конструктивно тиристор состоит из четырёхслойного кристалла кремния, помещённого в герметизированный металлический корпус. Внешние выводы от крайних слоёв кристалла служат анодом и катодом, а вывод от среднего слоя является управляющим электродом.
Графическое изображение тиристора.
Условное обозначение тиристора дано на рис.12,а. Там же приведена его вольт-амперная характеристика. Тиристор может находиться только в двух крайних состояниях проводимости. Либо он полностью проводит, т.е. при любом токе падение напряжения на тиристоре не превышает 1-1,5 В, либо тиристор заперт, тогда при любом напряжении ток через тиристор очень мал. Переход в эти состояния обеспечивается соответствующими токами управления.
Либо он полностью проводит, т.е. при любом токе падение напряжения на тиристоре не превышает 1-1,5 В, либо тиристор заперт, тогда при любом напряжении ток через тиристор очень мал. Переход в эти состояния обеспечивается соответствующими токами управления.
Ток управления подается на управляющий электрод. При отсутствии сигнала управления (Iу=0) и Uмакс < Uт:макс тиристор имеет большое (но конечное) сопротивление и через нагрузку протекает небольшой ток (ветвь 1 на рис. 12,а). Если Uмакс > Uт:макс, то тиристор открывается и через нагрузку течет ток, определяемый её сопротивлением. При номинальном токе управления Iу.н переход на ветвь 2 происходит по пунктирной кривой. Таким образом, при отсутствии тока управления Iу=0 тиристор ведет себя как очень большое сопротивление, при наличии номинального тока управления – как очень малое сопротивление. После прохождения переменного тока через нуль тиристор восстанавливает свои вентильные свойства, цепь тока обрывается.
Если к тиристору приложить обратное напряжение, то он останется в запертом состоянии до тех пор, пока приложенное напряжение не превысит напряжения пробоя Uпр=Uобр. макс.
Эти свойства тиристора могут быть использованы для построения схем автоматического управления, создания усилителей, релейных элементов и для бездуговой коммутации электрических цепей.
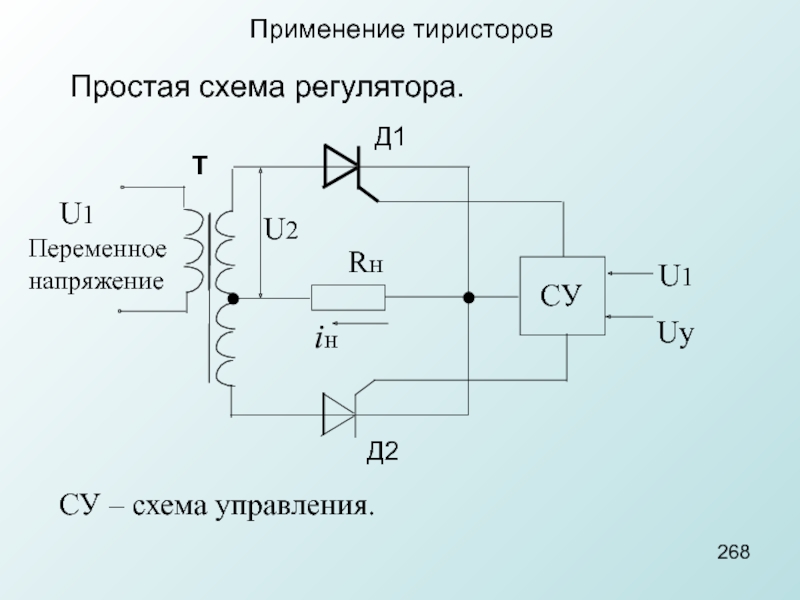
Для регулирования тока в оба полупериода применяется схема включения рис. 12,б. В настоящее время создан полупроводниковый управляемый вентиль на оба направления — симметричный тиристор или симистор, обладающий свойствами схемы рис. 12,б. Условное обозначение симистора дано на рис. 12, в. Большим недостатком тиристора является гальваническая связь между входной цепью и управляемой цепью. В настоящее время созданы тиристоры с оптической системой управления (оптроны). Управляющий сигнал воздействует на светодиод. Световой поток этого диода воздействует на фототиристор, который открывается под действием светового потока.
Достоинства тиристоров: малые габариты, простота конструкции, отсутствие подвижных частей, неограниченное число допустимых включений, длительный срок эксплуатации без обслуживания и ремонта, отсутствие шума и вибрации при включениях и отключениях.
Тиристор как релейный элемент.
Простейший релейный элемент, использующий тиристор, показан на рис. 12, г. Источник питания переменного тока. Цепь управления питается от того же источника. Напряжение питания выбирается так, что Uмакс < U т.макс. При разомкнутом ключе K1 ток Iу=0, тиристор закрыт и ток в нагрузке Rн равен нулю. После замыкания K1 при положительной полуволне напряжения тиристор открывается и через нагрузку протекает ток, пока полярность напряжения не станет отрицательной. В следующий положительный полупериод через нагрузку снова протекает ток. После размыкания ключа К1в положительный полупериод напряжения ток продолжает протекать через нагрузку до своего нулевого значения. После прохода тока через нуль цепь разрывается.
После прохода тока через нуль цепь разрывается.
Резистор R1 ограничивает ток Iу, а вентиль Д1защищает управляющий переход тиристора от обратного напряжения. Следует отметить, что принципиально схема может работать и на постоянном токе, но для закрытия тиристора после снятия управляющего сигнала необходимо применение специальных схем, которые отключаемый постоянный ток превращают в переменный, после чего цепь разрывается тиристором.
Ключ K1 может быть бесконтактным (транзистор, магнитный усилитель).
На рис. 13 представлена схема управления обмоткой Л мощного контактора. Элемент Т-402 имеет мощность 3 Вт, недостаточную для управления таким контактором. При подаче напряжения на вход 3 или 5 транзистор открывается. Точка 9 соединяется с нулевой шиной. Потенциал управляющего электрода становится положительным. Тиристор открывается, и через него получает питание обмотка Л. Резистор R ограничивает ток управляющего электрода. Коэффициент усиления тиристора по току достигает 104, а по мощности 105.
Резистор R ограничивает ток управляющего электрода. Коэффициент усиления тиристора по току достигает 104, а по мощности 105.
Рис.13. Схема тиристорного усилителя.
Тиристор как регулирующий элемент.
Если использовать для управления тиристором МУС или БМУ, то, изменяя ток управления усилителя, мы можем изменять угол насыщения магнитопровода и момент появления напряжения на нагрузке, которое открывает тиристор. Таким образом, система МУС — тиристор позволяет осуществить широтно-импульсное регулирование тока в нагрузке.
На рис. 14 представлена тиристорная схема управления двигателем постоянного тока. Тиристор в этой схеме является управляемым выпрямителем. Управление тиристором производится напряжением, создаваемым на резисторе Rн током нагрузки МУС. Магнитодвижущая сила обмотки смещения wсм выбирается такой, чтобы при токе управления МУС, равном нулю, ток нагрузки через резистор Rн был минимальным.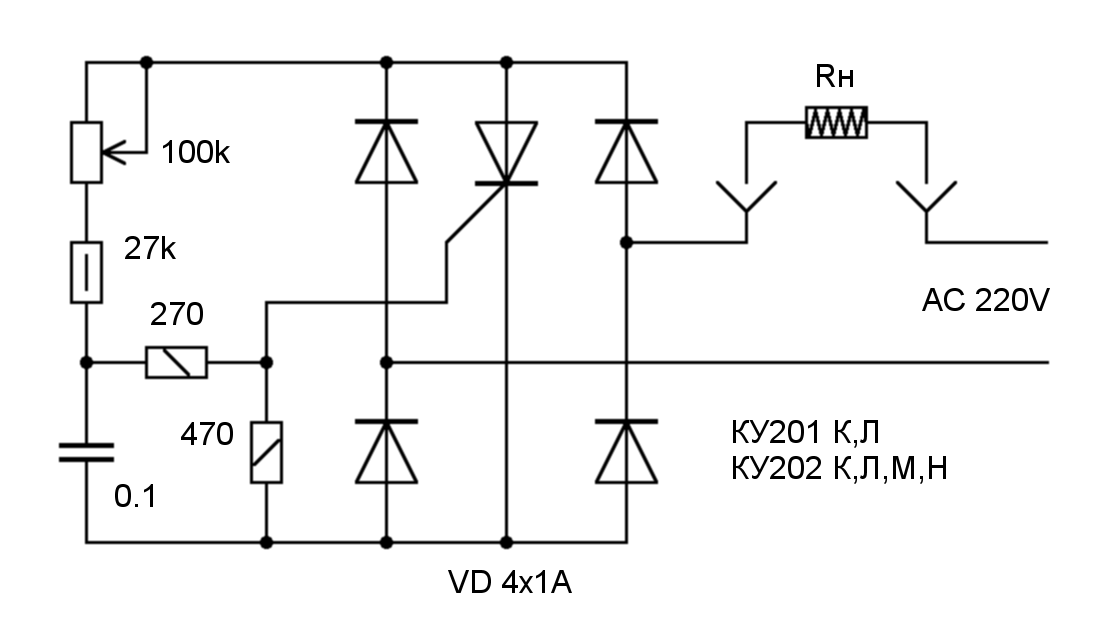 Диод Д2 служит для того, чтобы тиристор Т не открывался током холостого хода МУС (напряжение холостого хода на резисторе Rн меньше порогового напряжения диода Д2). При подаче тока управления в МУС напряжение, создаваемое на резисторе Rн, открывает тиристор, через двигатель протекает ток iа. Из-за наличия индуктивности цепи якоря тиристор закрывается не в нуле напряжения, а в момент t2, когда ток становится равным нулю. Регулируя ток управления МУС, можно менять угол открытия тиристора а и средний ток, протекающий через якорь.
Диод Д2 служит для того, чтобы тиристор Т не открывался током холостого хода МУС (напряжение холостого хода на резисторе Rн меньше порогового напряжения диода Д2). При подаче тока управления в МУС напряжение, создаваемое на резисторе Rн, открывает тиристор, через двигатель протекает ток iа. Из-за наличия индуктивности цепи якоря тиристор закрывается не в нуле напряжения, а в момент t2, когда ток становится равным нулю. Регулируя ток управления МУС, можно менять угол открытия тиристора а и средний ток, протекающий через якорь.
| 60.)Тиристорные пускатели |
Тиристорные пускатели являются бесконтактными аппаратамии служат для включения и выключения электромеханических систем. В каждой фазе пускателя (рис. 1) включены незапирающиеся тиристоры VS1 — VS3 и диоды VD1 — VD3. Тиристоры открываются один раз в течение периода последовательно через промежутки времени Т/3, в моменты времени, когда подается импульс на открывание тиристора, при прохождении напряжения через нуль в сторону увеличения его в проводящем направлении.
После того как напряжение достигнет нулевого значения, тиристор становится непроводящим и напряжение данной фазы подается через параллельный диод. По истечении одной трети периода включается следующий тиристор и т. д. Этим обеспечивается непрерывная подача энергии приемнику, например асинхронному двигателю МА (рис. 1). Отметим, что в приводе отсутствуют контактные устройства, имеются только кнопки «Пуск» и «Стоп».
Рис. 1. Тиристорный пускатель
Импульсы на открывание тиристоров подаются на зажимы 1, 2, 3, 4, 5, 6 формирователя импульсов, который питается от отдельного трансформатора Т через диоды VD4, VD5 и VD6, чем обеспечивается подача импульсов одной полярности. При нажатии кнопки «Пуск» включаются формирователь импульсов и пускатель.
Тиристоры открываются один раз в течение периода последовательно через промежутки времени Т/3, в моменты времени, когда подается импульс на открывание тиристора, при прохождении напряжения через нуль в сторону увеличения его в проводящем направлении.
После того как напряжение достигнет нулевого значения, тиристор становится непроводящим и напряжение данной фазы подается через параллельный диод. По истечении одной трети периода включается следующий тиристор и т. д. Этим обеспечивается непрерывная подача энергии приемнику, например асинхронному двигателю МА (рис. 1). Отметим, что в приводе отсутствуют контактные устройства, имеются только кнопки «Пуск» и «Стоп».
Рис. 1. Тиристорный пускатель
Импульсы на открывание тиристоров подаются на зажимы 1, 2, 3, 4, 5, 6 формирователя импульсов, который питается от отдельного трансформатора Т через диоды VD4, VD5 и VD6, чем обеспечивается подача импульсов одной полярности. При нажатии кнопки «Пуск» включаются формирователь импульсов и пускатель. Защита двигателя обеспечивается при помощи предохранителей F и схемы защиты от недопустимых токов. В каждой фазе пускателя включены трансформаторы тока. Токи трех фаз суммируются и преобразуются в напряжение. При установленном значении напряжения, если оно действует не кратковременно, снимаются открывающие импульсы и привод останавливается. При нажатии кнопки «Стоп» также прекращается подача импульсов.
Формирователь импульсов тиристорного пускателя
Для управления тиристорами, т. е. для формирования в соответствующие моменты времени управляющих импульсов, могут применяться различные устройства: электромагнитные с магнитными усилителями и трансформаторами, маломощные тиристорные устройства, транзисторные устройства и др. Наибольшее распространение получили транзисторные схемы, одна из которых будет рассмотрена.
Управление может производиться по горизонтальному или вертикальному принципу. При горизонтальном управлении напряжение переменного тока может сдвигаться по фазе («горизонтально») при помощи фазовращателя, обычно в пределах угла от 0 до π.
Защита двигателя обеспечивается при помощи предохранителей F и схемы защиты от недопустимых токов. В каждой фазе пускателя включены трансформаторы тока. Токи трех фаз суммируются и преобразуются в напряжение. При установленном значении напряжения, если оно действует не кратковременно, снимаются открывающие импульсы и привод останавливается. При нажатии кнопки «Стоп» также прекращается подача импульсов.
Формирователь импульсов тиристорного пускателя
Для управления тиристорами, т. е. для формирования в соответствующие моменты времени управляющих импульсов, могут применяться различные устройства: электромагнитные с магнитными усилителями и трансформаторами, маломощные тиристорные устройства, транзисторные устройства и др. Наибольшее распространение получили транзисторные схемы, одна из которых будет рассмотрена.
Управление может производиться по горизонтальному или вертикальному принципу. При горизонтальном управлении напряжение переменного тока может сдвигаться по фазе («горизонтально») при помощи фазовращателя, обычно в пределах угла от 0 до π. Полученные от фазовращателей напряжения, например для мостового трехфазного выпрямителя шесть напряжений, сдвинутых по фазе на углы π/3, подаются на формирователь, выдающий управляющие импульсы достаточной длительности.
Больше распространен вертикальный принцип управления, при котором управляющий импульс формируется, например, в моменты равенства управляющего напряжения линейно возрастающему пилообразному напряжению.
Подобная схема для одного канала управления двухполупериодного выпрямителя дана на рис. 2, а. На вход поступает переменное напряжение м, сформированное в виде прямоугольных импульсов, имеющих ширину π (рис. 2,б).
Рис. 2. Формирователь импульсов тиристорного пускателя: a — схема получения управляющих импульсов, б — временные диаграммы напряжений в узлах схемы
Отрицательное напряжение подается через диод VD1 на базу транзистора VT1 в течение проводящей части периода. В эти отрезки времени напряжение ur4С1 относительно невелико. После того как снимается отрицательное напряжение с базы транзистора VT1 начинает возрастать напряжение ur4С1 практически линейно при больших сопротивлениях г2 и г4.
Полученные от фазовращателей напряжения, например для мостового трехфазного выпрямителя шесть напряжений, сдвинутых по фазе на углы π/3, подаются на формирователь, выдающий управляющие импульсы достаточной длительности.
Больше распространен вертикальный принцип управления, при котором управляющий импульс формируется, например, в моменты равенства управляющего напряжения линейно возрастающему пилообразному напряжению.
Подобная схема для одного канала управления двухполупериодного выпрямителя дана на рис. 2, а. На вход поступает переменное напряжение м, сформированное в виде прямоугольных импульсов, имеющих ширину π (рис. 2,б).
Рис. 2. Формирователь импульсов тиристорного пускателя: a — схема получения управляющих импульсов, б — временные диаграммы напряжений в узлах схемы
Отрицательное напряжение подается через диод VD1 на базу транзистора VT1 в течение проводящей части периода. В эти отрезки времени напряжение ur4С1 относительно невелико. После того как снимается отрицательное напряжение с базы транзистора VT1 начинает возрастать напряжение ur4С1 практически линейно при больших сопротивлениях г2 и г4. Когда это возрастающее напряжение ur4С1 станет равным управляющему напряжению Uy, появляется напряжение на выходе транзистора VT2. При дифференцировании импульса тока в цепи транзистора VT2 формируется импульс напряжения uвых в цепи управления тиристора.
В представленной схеме (рис. 2, а) диод VD4 служит для ограничения отрицательного напряжения, подаваемого на базу транзистора VT2, диод VD3 препятствует замыканию источника управляющего напряжения через разряженный конденсатор С1 или насыщенный транзистор VT1, а диод VD5 ограничивает значение выходного импульса.
Когда это возрастающее напряжение ur4С1 станет равным управляющему напряжению Uy, появляется напряжение на выходе транзистора VT2. При дифференцировании импульса тока в цепи транзистора VT2 формируется импульс напряжения uвых в цепи управления тиристора.
В представленной схеме (рис. 2, а) диод VD4 служит для ограничения отрицательного напряжения, подаваемого на базу транзистора VT2, диод VD3 препятствует замыканию источника управляющего напряжения через разряженный конденсатор С1 или насыщенный транзистор VT1, а диод VD5 ограничивает значение выходного импульса.
|
Методы управления мощностью переменного тока | Реостат, Напряжение, Тиристор Регулятор мощности
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
Для управления мощностью переменного тока в нагрузке было разработано множество методов. Некоторые из них нашли широкое применение, в то время как другие имеют особую специализацию в своем применении.
Импульсное управление
Реостатное управление
Управление напряжением
Тиристорное управление мощностью
Мощность нагрузки может регулироваться методом переключения, когда нагрузка включается и выключается; или линейными методами, когда мощность нагрузки регулируется путем непрерывного или бесконечного регулирования напряжения нагрузки.
Коммутируемое управление
В принципе, метод переключения является самым простым методом управления мощностью. Как показано на Рисунок 1 , управление состоит из переключателя для подключения или отключения нагрузки от источника питания. Управление ограничено простым действием включения/выключения. Мощность переменного тока, рассеиваемая нагрузкой, определяется током и напряжением нагрузки.
Рисунок 1 Переключение управления нагрузкой
Эта форма управления ограничена ситуациями, когда управление включением/выключением — это все, что требуется, например, управление температурой запасенной воды, когда переключатель фактически представляет собой термостат и циклы нагрузка в зависимости от изменения температуры.
Разновидностью переключаемого управления является управление simmerstat. Симмерстат — это переключатель, который включается и выключается небольшим нагревательным элементом внутри него. Сам контакт переключателя установлен на биметаллической пластине, которая изгибается при изменении температуры, открывая и закрывая переключатель.
Средняя мощность переменного тока, рассеиваемая нагрузкой, контролируется относительным временем включения/выключения simmerstat. Действие переключения не зависит от мощности, фактически рассеиваемой в нагрузке. В некоторых ситуациях это может быть недостатком.
Симмерстат широко используется для управления нагревательными элементами, такими как конфорки на электрических плитах и электрические одеяла.
Преимущества этого метода в том, что он прост и относительно недорог. Недостатки заключаются в том, что он обеспечивает грубое управление, относительно ненадежен и неточен, а также подвержен контактному износу и/или усталости.
В реостатном управлении используется последовательно соединенный реостат (переменное сопротивление), как показано на Рисунок 2 , для управления мощностью нагрузки. Поскольку сопротивление включается последовательно с нагрузкой, напряжение нагрузки и, следовательно, мощность переменного тока уменьшается. Снижение напряжения нагрузки вызвано падением напряжения на реостате.
Мощность переменного тока можно регулировать от очень низкого значения до полной мощности. Однако для широкого диапазона регулирования реостат может быть физически очень большим; на самом деле он может быть больше, чем нагрузка. Для управления нагрузкой мощность должна рассеиваться в реостате. Это потеря мощности, которая приводит к низкой эффективности при низких настройках нагрузки. При уменьшении мощности нагрузки до 50 % мощность, рассеиваемая в реостате, равна мощности нагрузки. 9
Например, предположим, что нагрузка в Рис. определить мощность нагрузки, входную мощность и КПД.
Если бы реостат в Рисунок 2 был установлен на 10 Ом, мощность нагрузки дополнительно снизилась бы до 250 Вт. КПД также уменьшился бы: в этом примере до 50 процентов. При дальнейшем снижении мощности нагрузки снижается и КПД.
Эта форма управления широко используется в оборудовании старой конструкции. Из-за его низкой эффективности и, как правило, плохой работы, в настоящее время он в значительной степени вытеснен более современными методами.
Помимо низкой эффективности, нежелательным аспектом этого метода является характер изменения напряжения нагрузки при изменении тока нагрузки. Это называется « плохое регулирование нагрузки» и может быть преодолено с помощью автоматических регуляторов напряжения, но это становится очень дорогим, когда мощность нагрузки высока, и все еще не компенсирует низкую эффективность метода.
Преимущество этого метода управления питанием переменного тока состоит в том, что он очень прост. Недостатки в том, что он очень неэффективен, громоздкий, очень дорогой (если принять во внимание эксплуатационные расходы) и плохо регулирует нагрузку.
Недостатки в том, что он очень неэффективен, громоздкий, очень дорогой (если принять во внимание эксплуатационные расходы) и плохо регулирует нагрузку.
Управление напряжением
Этот метод регулирует мощность нагрузки таким же образом, как и реостатное управление, т. е. путем изменения напряжения нагрузки, но с использованием либо вариака, либо катушки индуктивности. Эти методы подходят только для источников переменного тока и нагрузок. Использование Variac или индуктора с отводами позволяет преодолеть низкую эффективность реостатного метода.
Вариаки и катушки индуктивности являются очень эффективными устройствами по сравнению с реостатами. Вариак — это форма трансформатора. Это переменный автотрансформатор. Эти устройства эффективны, но имеют тот недостаток, что они громоздки, тяжелы и дороги, особенно при высокой мощности нагрузки.
Мощность переменного тока можно регулировать от нуля до номинальной мощности. Рисунок 3 показывает Variac, подключенный для управления мощностью нагрузки.
Рисунок 3 Регулятор мощности Variac
Этот метод очень эффективен (можно ожидать КПД более 90 %), обеспечивает точное управление и достаточно хорошую регулировку напряжения нагрузки. Из-за высокой стоимости и массы Variac он обычно ограничивается приложениями с низким энергопотреблением. Скользящие контакты в Variac также могут иметь проблемы с износом.
Метод индуктора с ответвлениями представляет собой вариант системы с регулируемым автотрансформатором. Он имеет ограниченное количество регулировок и эффективно добавляет импеданс последовательно с нагрузкой. Этот метод более эффективен, чем метод реостата, но все же не обеспечивает очень хорошего регулирования нагрузки.
На рисунке 4 показан дроссель с ответвлениями, подключенный для управления мощностью переменного тока в нагрузке.
Рисунок 4 Регулирование мощности с помощью индуктора с ответвлениями
Этот метод используется для управления скоростью потолочных вентиляторов и других маломощных устройств. Управление высокими значениями мощности нагрузки с помощью этого метода потребует больших и дорогих катушек индуктивности.
Управление высокими значениями мощности нагрузки с помощью этого метода потребует больших и дорогих катушек индуктивности.
Преимущества метода заключаются в том, что он прост и эффективен, а его недостатки заключаются в том, что он является дорогостоящим для нагрузок средней и высокой мощности, плохо регулирует нагрузку и обеспечивает управление только дискретными шагами.
Тиристорное управление мощностью
Тиристорное управление в значительной степени вытеснило все другие методы управления мощностью переменного тока. Он предлагает эффективное и экономичное управление мощностью в большинстве приложений от очень низкого до очень высокого уровня мощности. На рисунке 5 показана упрощенная схема тиристорного регулятора мощности.
Рисунок 5 Тиристорное управление мощностью переменного тока
Тиристоры представляют собой семейство электронных устройств, разработанных специально для обеспечения функций управления мощностью. По сути, это управляемые переключатели. Тиристоры включаются импульсом тока затвора, причем затвор является управляющим выводом устройства. После включения эти устройства оказывают очень малое сопротивление и, следовательно, рассеивают очень мало энергии, что обеспечивает высокую эффективность.
По сути, это управляемые переключатели. Тиристоры включаются импульсом тока затвора, причем затвор является управляющим выводом устройства. После включения эти устройства оказывают очень малое сопротивление и, следовательно, рассеивают очень мало энергии, что обеспечивает высокую эффективность.
Тиристорные регуляторы обеспечивают эффективное управление мощностью переменного тока одним из двух методов :
1. Управление фазой — форма волны переменного тока «разбивается» для достижения различных значений напряжения нагрузки. Форма волны напряжения нагрузки больше не является синусоидальной, но во многих приложениях это не проблема. Переменное напряжение получается за счет задержки «срабатывания» тиристора и, следовательно, уменьшения времени проводимости.
Преимущество этого метода заключается в том, что его можно применять к нагрузкам переменного или постоянного тока, питаемым от источника переменного тока. Его недостаток в том, что он создает радиочастотные помехи (РЧП) при срабатывании тиристора. Сигналы в Рисунок 6 представляют типичные формы сигналов напряжения нагрузки, поступающие от тиристорного контроллера с фазовым управлением.
Сигналы в Рисунок 6 представляют типичные формы сигналов напряжения нагрузки, поступающие от тиристорного контроллера с фазовым управлением.
Рисунок 6 Осциллограммы напряжения нагрузки управления фазой
2. Переключение при нулевом напряжении — был ли этот метод управления разработан для преодоления ВЧ-помех, создаваемых методами управления фазой. Он работает аналогично симмерстату в том смысле, что напряжение нагрузки регулируется путем управления относительным временем включения/выключения. Однако в этом случае время включения и выключения будет измеряться в циклах.
При большой мощности тиристор будет включен на большее количество циклов, чем выключен, а при малой мощности — обратное. Чтобы свести к минимуму радиопомехи, тиристор переключается, когда напряжение питания пересекает ноль или достигает нуля вольт. В отличие от управления simmerstat, этот метод может использовать обратную связь от нагрузки для обеспечения точного управления. Этот метод подходит только для резистивных нагрузок, таких как нагревательные элементы. Он не подходит для индуктивных нагрузок. Типичные формы сигналов показаны на Рисунок 7 .
Этот метод подходит только для резистивных нагрузок, таких как нагревательные элементы. Он не подходит для индуктивных нагрузок. Типичные формы сигналов показаны на Рисунок 7 .
Рисунок 7 Осциллограммы нагрузки для переключения при нулевом напряжении
Тиристорные регуляторы широко используются для управления мощностью переменного тока в промышленных и бытовых приложениях. Тиристорный контроллер может быть спроектирован и изготовлен для управления лампой в домашних условиях или для управления нагрузками, такими как двигатель мощностью 1500 кВт в промышленности.
Преимущество тиристорных регуляторов в том, что они относительно недороги (с учетом эксплуатационных расходов), высокоэффективны, надежны, адаптируются к большинству ситуаций, хорошо регулируют нагрузку и относительно компактны.
Недостатком является то, что могут потребоваться сложные схемы запуска или управления. Цепи управления фазой создают радиочастотные помехи (РЧП), и большинство контроллеров создают несинусоидальные сигналы, которые имеют тенденцию генерировать гармоники в питании.
Тиристорные устройства, наиболее часто используемые для управления мощностью в нагрузке:
- Кремниевые выпрямители (SCR)
- Запорные тиристоры (тиристоры GTO)
- Триаки.
Тиристоры являются переключающими устройствами. Они запускаются (включаются) импульсом тока через клемму затвора. Тиристор должен сопровождаться подходящей пусковой схемой, в которой активный компонент известен как «пусковое устройство». Триггерные устройства:
- Однопереходные транзисторы (UJT)
- Программируемые однопереходные транзисторы (PUT)
- Диаки.
Вы нашли apk для Android? Вы можете найти новые бесплатные игры и приложения для Android.
Регулятор напряжения переменного тока, регулятор напряжения переменного тока
Базовая электроника
Энгр Фахад
Отправить письмо
26 ноября 2020 г.
4 787
Содержание
Контроллер напряжения переменного тока:
Контроллер или регулятор напряжения переменного тока преобразует фиксированный источник переменного напряжения в переменный источник переменного напряжения и управляет мощностью нагрузки, изменяя среднеквадратичное значение напряжения нагрузки. Выходная частота всегда равна входной частоте и может использоваться в промышленности для управления скоростью трехфазного асинхронного двигателя, магнитного управления мощностью переменного тока и переключения ответвлений трансформатора нагрузки. Он также используется в управлении реактивной мощностью. Самый простой способ управления Напряжение переменного тока подается на нагрузку с помощью переключателя переменного тока. Этот переключатель будет двунаправленным, как симистор или пара тиристоров, соединенных встречно-параллельно. Переключающие устройства, отличные от тиристоров, также могут использоваться для реализации двунаправленных переключателей. В большинстве случаев результат управления не зависит от используемого переключателя. Практические ограничения доступных в настоящее время номиналов симисторов часто делают необходимым использование SCR в приложениях с очень большой мощностью, для которых могут использоваться симисторы.
В большинстве случаев результат управления не зависит от используемого переключателя. Практические ограничения доступных в настоящее время номиналов симисторов часто делают необходимым использование SCR в приложениях с очень большой мощностью, для которых могут использоваться симисторы.
Управление мощностью переменного тока:
Существует два основных метода управления интегральным циклом мощности нагрузки или интегральным циклом мощности, которые изменяют только уровень напряжения сигнала, а частота формы волны остается неизменной. Первый метод подходит для систем с большой постоянной времени, таких как системы контроля температуры. Питание нагрузки можно подключить к источнику и нагрузке на несколько полных циклов, затем отключить источник от нагрузки на другое количество циклов и повторить цикл переключения. Периоды включения и выключения относительной продолжительности рабочего цикла d регулируются таким образом, чтобы средняя мощность, подаваемая на нагрузку, соответствовала какой-либо конкретной цели. В идеальных условиях средняя мощность нагрузки может регулироваться от 0% до 100%.
В идеальных условиях средняя мощность нагрузки может регулироваться от 0% до 100%.
Интегральное управление циклом:
Интегральное управление циклом не будет использоваться, если нагрузки имеют короткую постоянную времени. В таких ситуациях можно использовать управление фазой. При фазовом регулировании нагрузка подключается к питанию на n циклов и отключается от питания на «m» циклов интегрального цикла. Напряжение на нагрузке можно изменять, изменяя угол зажигания для каждого полупериода периода. Если ⍺=0, выходное напряжение максимально, если ⍺=π, выходное напряжение минимально.
Таким образом, выходное напряжение можно регулировать до любого значения между нулем и напряжением источника. Этот процесс создает переменный выходной сигнал с регулируемой фазой, который подходит для таких приложений, как управление молнией и скоростью двигателя.
Однофазный двухполупериодный контроллер переменного напряжения:
В однофазном двухволновом контроллере переменного напряжения мы используем два тиристора, включенных встречно-параллельно, которые будут подключены к входному напряжению переменного тока. На выходе подключен резистор, напряжение, которое мы подаем со входа, будет равно В м sinωt , что обеспечит ввод в синусоидальной форме. Мы подадим триггерный импульс на обе стороны тиристоров. В котором тиристор 1 будет работать в положительном полупериоде, а тиристор 2 будет работать в отрицательном полупериоде. Мы получим напряжение на резисторе.
На выходе подключен резистор, напряжение, которое мы подаем со входа, будет равно В м sinωt , что обеспечит ввод в синусоидальной форме. Мы подадим триггерный импульс на обе стороны тиристоров. В котором тиристор 1 будет работать в положительном полупериоде, а тиристор 2 будет работать в отрицательном полупериоде. Мы получим напряжение на резисторе.
Рабочий:
Когда мы обеспечим цикл положительного напряжения напряжения источника, верхняя часть цикла будет положительной, а нижняя часть будет отрицательной. Ток, который будет течь от источника напряжения, будет источником тока. Этот ток будет течь от тиристора 1. Таким образом, в положительный полупериод тиристор 1 будет проводить. После угла ⍺ на затворе тиристора будет подан триггерный импульс, обеспечивающий перевод тиристора в проводящее положение. ⍺ угол — это угол открытия, для активации которого требуется триггерный импульс на воротах. Когда он сработает, он начнет проводить ток, тирситор 2 не будет проводить. Напряжение на тиристоре 2 упадет, но на тиристоре 1 напряжение не упадет. Ток от тиристора 1 пойдет на резистор, который будет известен как выходной ток. Форма выходного сигнала будет равна . Его значение будет между 0 и π. Мы не получим никакого напряжения, если мы не обеспечим триггерное напряжение на затворе. На диаграмме точка, в которой у нас нет напряжения, известна как угол открытия ⍺. На диаграмме мы показываем две волны, одна волна — это напряжение источника, а другая — выходное напряжение. Тиристор будет давать выходное напряжение после угла открытия. Волна исходного напряжения перед углом открытия не будет возникать на выходе. Тиристор будет проводить в течение периода времени T1. Выходной ток будет таким же, как и напряжение.
Напряжение на тиристоре 2 упадет, но на тиристоре 1 напряжение не упадет. Ток от тиристора 1 пойдет на резистор, который будет известен как выходной ток. Форма выходного сигнала будет равна . Его значение будет между 0 и π. Мы не получим никакого напряжения, если мы не обеспечим триггерное напряжение на затворе. На диаграмме точка, в которой у нас нет напряжения, известна как угол открытия ⍺. На диаграмме мы показываем две волны, одна волна — это напряжение источника, а другая — выходное напряжение. Тиристор будет давать выходное напряжение после угла открытия. Волна исходного напряжения перед углом открытия не будет возникать на выходе. Тиристор будет проводить в течение периода времени T1. Выходной ток будет таким же, как и напряжение.
Во время отрицательного полупериода тиристор 1 не проводит ток. Только тиристор 2 будет проводить теперь мы снова подадим импульс запуска для тиристора 2 после угла открытия тиристор 2 начнет проводить ток пойдет на резистор. Форма волны будет происходить между π и 2π.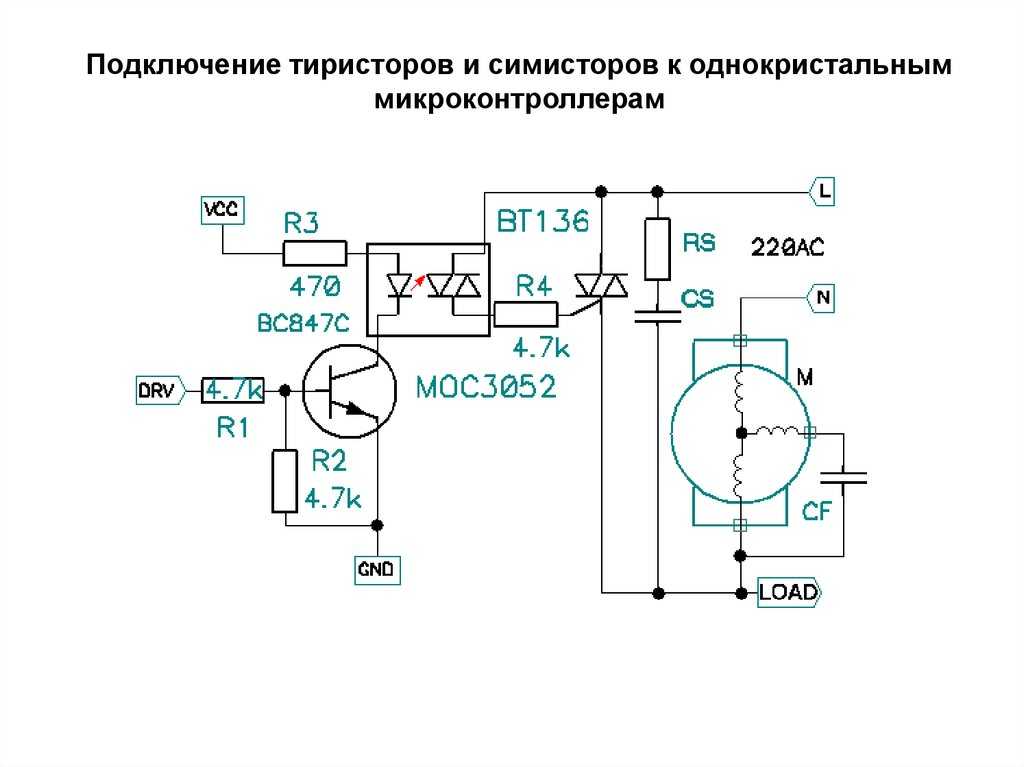 Выходной ток будет аналогичен выходному напряжению. Теперь снова при появлении положительного цикла тиристор закроется и начнет работать тиристор 1.
Выходной ток будет аналогичен выходному напряжению. Теперь снова при появлении положительного цикла тиристор закроется и начнет работать тиристор 1.
Однофазное управление с нагрузкой RL:
Напряжение будет подаваться со входа, которое будет V m sinωt. При этом положительный цикл будет переходить от тиристора 1 к нагрузкам, представляющим собой резистор и индуктор. Индуктор начнет накапливать энергию. I g1 представляет ток тиристора 1, а I g2 представляет ток тиристора 2, который будет находиться в обратном смещении. Тиристор не проводит ток при угле ⍺. Когда импульс закончится, выходной ток не будет равен нулю. Ток будет близок к максимальному, потому что на выходе подключена катушка индуктивности. Индуктор будет поддерживать выходной ток, чтобы ток не стал внезапно равным нулю. Когда выходной ток будет равен нулю, выходное напряжение также будет равно нулю, а при подаче импульса на триггер тиристора будет формироваться выходное напряжение.
Это напряжение будет равно максимальному напряжению. Импульс, в котором выходной ток отрицательный, а напряжение положительное, обусловлен тиристором 2, который будет находиться в проводящем состоянии. Когда придет отрицательный цикл, он будет проводить на определенном пределе из-за индуктора. Ток будет течь, пока не станет равным нулю. Когда ток станет равным нулю, падение напряжения на тиристоре 1 будет положительным, а падение напряжения на тиристоре 2 — отрицательным. При возникновении отрицательного цикла полярность питания будет изменена. При отрицательном начале цикла выходной ток уменьшится, и наступит точка, в которой мы подарим его с β, при котором выходной ток будет равен нулю. Начнет течь ток от индуктора, который был сохранен индуктором, и ток начнет уменьшаться, что обозначается как β. В этом состоянии тиристор 1 также будет находиться в проводящем состоянии. Тиристор 1 будет проводить между ⍺ и β.
Ток будет равен нулю после β в течение определенного времени. Тогда ток пойдет в обратном направлении. Когда отрицательный полупериод завершится, выходной ток не будет равен нулю и будет близок к максимальному значению.
Тогда ток пойдет в обратном направлении. Когда отрицательный полупериод завершится, выходной ток не будет равен нулю и будет близок к максимальному значению.
Двухступенчатый регулятор напряжения переменного тока с последовательным управлением с нагрузкой R:
В этом мы будем использовать набор тиристоров, соединенных встречно-параллельно, т.е. мы будем использовать четыре тиристора в этой схеме. Напряжение источника обеспечит переменное напряжение, которое будет состоять из первичной обмотки и вторичной обмотки. Вторичная обмотка будет иметь отвод от центра, две обмотки будут взаимно соединены. Напряжение с одной обмотки будет V1= V m sinωt и напряжение на второй обмотке
V2= V m sinωt
Цепь подключена к резистивной нагрузке на выходе.
Рабочий:
Тиристоры Т3 и Т4 будут работать только тогда, когда ωt=0 означает, что угол открытия ⍺ будет равен нулю. Тиристоры Т1 и Т2 сработают при подаче импульса под определенным углом, т. е. угол открытия будет под определенной фазой. Когда мы начнем питание от напряжения источника, когда произойдет положительный цикл и ωt=0, тогда тиристор 3 будет проводить, и ток будет проходить от тиристора 3. Напряжение будет от вторичной обмотки V2, а ток источника будет течь от тиристора T3. когда ⍺ будет равно нулю, когда ωt будет равно ⍺, то подадим триггерный импульс на затвор T1, тогда тиристор 3 закроется, а тиристор 1 в это время будет открыт, тогда напряжение будет от V1+V2 и ток источника будет течь в T1. Волна пойдет вверх после триггерного импульса. Это связано с тем, что сначала было только одно напряжение, которое было V1, а теперь у нас есть два напряжения, которые равны V1 + V2, вся вторичная обмотка будет работать.
е. угол открытия будет под определенной фазой. Когда мы начнем питание от напряжения источника, когда произойдет положительный цикл и ωt=0, тогда тиристор 3 будет проводить, и ток будет проходить от тиристора 3. Напряжение будет от вторичной обмотки V2, а ток источника будет течь от тиристора T3. когда ⍺ будет равно нулю, когда ωt будет равно ⍺, то подадим триггерный импульс на затвор T1, тогда тиристор 3 закроется, а тиристор 1 в это время будет открыт, тогда напряжение будет от V1+V2 и ток источника будет течь в T1. Волна пойдет вверх после триггерного импульса. Это связано с тем, что сначала было только одно напряжение, которое было V1, а теперь у нас есть два напряжения, которые равны V1 + V2, вся вторичная обмотка будет работать.
Когда от источника придет отрицательный цикл, первичка и младшая вторичка начнут работать, напряжение будет V2, когда мы подадим триггерный импульс на T4, он начнет проводить. Выходное напряжение будет начинаться в обратном направлении, и ωt будет равно π. Выходной ток будет также в обратном направлении. Когда на затвор T2 будет подаваться триггерный импульс, выходное напряжение будет равно V1+V2.
Выходной ток будет также в обратном направлении. Когда на затвор T2 будет подаваться триггерный импульс, выходное напряжение будет равно V1+V2.
Многоступенчатое последовательное управление напряжением:
Контроллер будет подключен в многоступенчатом режиме. На вторичной обмотке будет отдельное напряжение, такое, что 1В на одной обмотке, 2В на второй обмотке и 8В на третьей обмотке.
Рабочий:
При подаче напряжения источника потечет ток источника с тиристора Т3 и он начнет работать и с Т3. T1 и T2 начнут работать под углом ⍺. Напряжение будет 10 Вм, что является суммой 2 и 8 вольт. В положительном цикле верхняя часть вторичной обмотки при подаче триггерного напряжения на тиристор Т1 начнет проводить ток. Тогда выходное напряжение будет суммой всех напряжений обмоток 1, 2 и 8В, что равно 11В. когда произойдет отрицательный цикл, тиристор T4 начнет проводить. Выходное напряжение будет суммой 2 и 8, что равно 10В.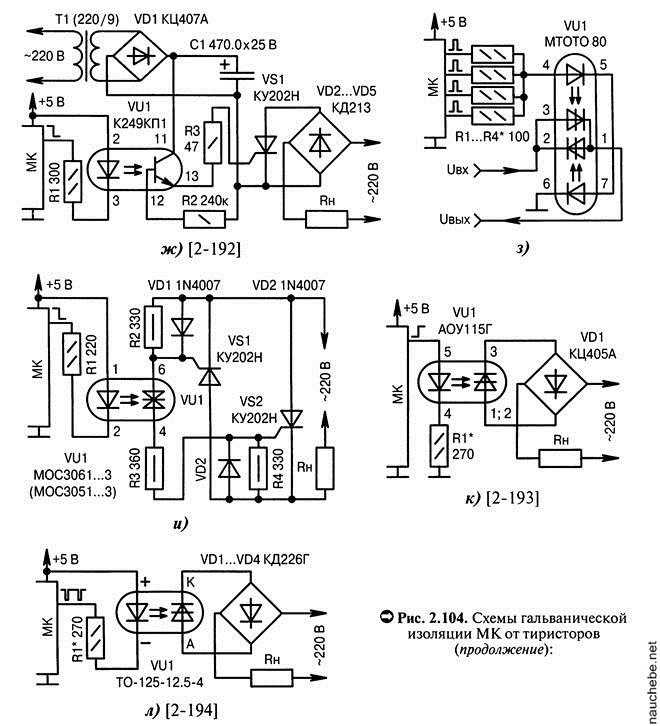 При этом на тиристор Т2 будет подан триггерный импульс, который начнет проводить при π+⍺. Когда T1 и T2 будут проводить, мы добавим все напряжения обмотки, а когда T3 и T4 будут проводить, мы добавим только две обмотки.
При этом на тиристор Т2 будет подан триггерный импульс, который начнет проводить при π+⍺. Когда T1 и T2 будут проводить, мы добавим все напряжения обмотки, а когда T3 и T4 будут проводить, мы добавим только две обмотки.
Повышающий циклопреобразователь со средней точкой:
В этом типе преобразователя P1 и P2 представляют собой тиристоры положительного типа, а N1 и N2 — тиристоры отрицательного типа, а нагрузка подключается к средней точке вторичной обмотки.
Работа циклоконвертера заключается в преобразовании частоты. Как следует из названия, это увеличит частоту. Выходная частота будет больше, чем входная частота. Верхняя часть схемы представлена буквой A, а нижняя часть представлена буквой B. Источник обеспечивает переменное напряжение. Когда появится положительное напряжение от источника, P1 и N2 начнут проводить одновременно. Точно так же P2 и N1 будут работать одновременно. В положительном цикле A станет положительным по отношению к B. Ток будет течь от P1 к нагрузке. P1 будет после ωt 1 за счет принудительной коммутации, и направление тока будет изменено. N2 также находится в проводящем состоянии A будет отрицательным по отношению к B. ток будет течь из точки O и проходить через N2, этот процесс будет выполняться в течение положительного полупериода. Выходное напряжение N2 будет отрицательным и мы пожертвуем при ωt 2. Аналогичный процесс будет продолжаться снова P1 начнет проводить этот процесс будет продолжаться до тех пор, пока положительный цикл не закончится.
Ток будет течь от P1 к нагрузке. P1 будет после ωt 1 за счет принудительной коммутации, и направление тока будет изменено. N2 также находится в проводящем состоянии A будет отрицательным по отношению к B. ток будет течь из точки O и проходить через N2, этот процесс будет выполняться в течение положительного полупериода. Выходное напряжение N2 будет отрицательным и мы пожертвуем при ωt 2. Аналогичный процесс будет продолжаться снова P1 начнет проводить этот процесс будет продолжаться до тех пор, пока положительный цикл не закончится.
Теперь, когда произойдет отрицательный цикл, P2 начнет проводить, и ток пойдет на нагрузку. Тогда ток будет проходить через N1.
Повышающий мостовой циклоконвертер:
В этом преобразователе тиристоры P1, P2, P3 и P4 используются для положительного цикла, а четыре других тиристора — N1, N2, N3 и N4 — для отрицательного полупериода. Нагрузка подключается между ними. В преобразователе этого типа P1 и P2 будут преобразовываться одновременно, а N1 и N2 будут преобразовываться одновременно. Они будут проводить параллельно в положительный полупериод. В период между 0 и π четыре тиристора будут проводить ток источника, который будет течь от положительных тиристоров и будет двигаться к P1, который находится в проводящем состоянии и проходит через нагрузку. Откуда он будет идти к P2 и снова к источнику.
Они будут проводить параллельно в положительный полупериод. В период между 0 и π четыре тиристора будут проводить ток источника, который будет течь от положительных тиристоров и будет двигаться к P1, который находится в проводящем состоянии и проходит через нагрузку. Откуда он будет идти к P2 и снова к источнику.
Результат, полученный в течение этого периода, будет от 0 до ωt1. При ωt1 за счет принудительной коммутации оба тиристора будут закрыты. N1 и N2 будут в рабочем состоянии. Теперь ток будет течь от отрицательного тиристора и будет проходить от N1, затем к нагрузке, откуда он проходит через N2, а затем к источнику. Теперь снова произойдет принудительная коммутация, и P1 и P2 начнут проводить. Аналогичный процесс будет использоваться для отрицательного цикла. Когда произойдет отрицательный цикл, P3 и P4 начнут проводить. Точка a станет отрицательной по отношению к точке b. Ток начнет течь вниз, когда произойдет силовая коммутация P3 и P4, а N3 и N4 начнут проводить.
