Как устроен асинхронный электродвигатель. Какие основные части входят в его конструкцию. На каком принципе основана работа асинхронного двигателя. Каковы преимущества и недостатки асинхронных электродвигателей. Где применяются асинхронные двигатели в промышленности и быту.
Конструкция асинхронного электродвигателя: основные элементы
Асинхронный электродвигатель состоит из двух основных частей:
- Статор — неподвижная часть
- Ротор — вращающаяся часть
Статор представляет собой полый цилиндр, собранный из тонких стальных пластин. На внутренней поверхности статора расположены пазы, в которые укладывается трехфазная обмотка.
Ротор устанавливается внутри статора на подшипниках. Он также набран из стальных пластин, в пазах которого размещена короткозамкнутая обмотка типа «беличье колесо».
Дополнительные элементы конструкции:
- Вал — для передачи вращающего момента
- Подшипниковые щиты
- Вентилятор — для охлаждения
- Клеммная коробка — для подключения питания
- Корпус — защищает внутренние части
Принцип работы асинхронного двигателя
Принцип действия асинхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с токами, индуцированными этим полем в обмотке ротора.

Ключевые моменты работы асинхронного двигателя:
- При подаче трехфазного напряжения на обмотку статора создается вращающееся магнитное поле.
- Это поле пересекает проводники обмотки ротора и индуцирует в них ЭДС.
- Под действием ЭДС в обмотке ротора возникают токи.
- Взаимодействие токов ротора с полем статора создает вращающий момент.
- Ротор начинает вращаться вслед за полем статора, но с некоторым отставанием (скольжением).
Особенности работы асинхронного электродвигателя
Какие ключевые особенности характеризуют работу асинхронного двигателя?
- Скорость вращения ротора всегда меньше скорости вращения магнитного поля статора
- Разница между скоростями вращения поля и ротора называется скольжением
- При увеличении нагрузки скольжение возрастает
- Максимальный момент развивается при скольжении 5-10%
- КПД асинхронных двигателей достигает 90-95%
Преимущества асинхронных электродвигателей
Асинхронные двигатели получили широкое распространение благодаря ряду важных достоинств:
- Простота конструкции и надежность
- Невысокая стоимость
- Высокий КПД
- Возможность прямого пуска от сети
- Хорошие пусковые характеристики
- Возможность кратковременных перегрузок
Недостатки асинхронных электродвигателей
Каковы основные недостатки асинхронных двигателей?
- Небольшой пусковой момент при прямом пуске
- Большой пусковой ток (5-7 крат от номинального)
- Низкий коэффициент мощности при малых нагрузках
- Сложность регулирования скорости
- Чувствительность к колебаниям напряжения сети
Применение асинхронных электродвигателей
Где находят применение асинхронные двигатели в промышленности и быту?
- Приводы насосов, вентиляторов, компрессоров
- Конвейеры и транспортеры
- Подъемно-транспортные механизмы
- Металлообрабатывающие станки
- Бытовая техника (пылесосы, стиральные машины и др.)
- Системы вентиляции и кондиционирования
- Электроинструмент
Типы асинхронных электродвигателей
Асинхронные двигатели подразделяются на несколько основных типов:
- По числу фаз питающей сети:
- Трехфазные
- Однофазные
- По типу ротора:
- С короткозамкнутым ротором
- С фазным ротором
- По числу пар полюсов:
- Двухполюсные
- Четырехполюсные
- Многополюсные
Регулирование скорости асинхронных двигателей
Какие способы используются для регулирования частоты вращения асинхронных электродвигателей?
- Изменение частоты питающего напряжения
- Изменение числа пар полюсов обмотки статора
- Регулирование напряжения, подводимого к статору
- Введение добавочного сопротивления в цепь ротора (для двигателей с фазным ротором)
Наиболее эффективным и экономичным является частотное регулирование с помощью преобразователей частоты.
Пуск асинхронных электродвигателей
Пуск асинхронного двигателя — важный этап его работы, сопровождающийся значительными пусковыми токами. Как осуществляется пуск асинхронных двигателей?
- Прямой пуск — подключение напрямую к сети (для двигателей малой мощности)
- Пуск переключением обмоток статора со звезды на треугольник
- Пуск с помощью автотрансформатора
- Плавный пуск с использованием устройств плавного пуска
- Частотный пуск с применением преобразователя частоты
Энергоэффективность асинхронных электродвигателей
Повышение энергоэффективности асинхронных двигателей — важная задача современной промышленности. Какие методы используются для повышения КПД асинхронных электродвигателей?
- Применение электротехнической стали с улучшенными магнитными свойствами
- Оптимизация геометрии активной части двигателя
- Использование медной обмотки ротора вместо алюминиевой
- Снижение механических потерь за счет совершенствования подшипниковых узлов
- Применение частотно-регулируемого электропривода
Принцип работы и устройство асинхронного двигателя
Асинхронный (индукционный) двигатель – механизм, превращающий силу переменного тока в механическую. Под асинхронным подразумевают, что скорость движения магнитной силы статора выше аналогичной величины оборотов ротора.
Для того, чтобы получше представлять, что такое асинхронный двигатель и принцип действия трехфазного асинхронного двигателя, где он используется и как работает, необходимо разобраться в его составных частях и деталях, исследовать технические характеристики. Кроме того, не лишним будет понять, как происходит преобразование силы во время пуска и где используется асинхронный двигатель на практике.
В сегодняшней статье мы попробуем ответить на самые интересные вопросы, связанные с асинхронными двигателями, разобраться в том, что такое устройство однофазного асинхронного двигателя, рассмотрим принципы работы, а также плюсы и минусы данного типа устройств.
Немного истории
Первый подобный механизм электродвигателей появился еще в 1888 году и представил его американский инженер Никола Тесла. Однако, его опытный образец устройства и был не самым удачным, так как был двух фазным или много фазным и рабочие характеристики асинхронного двигателя не удовлетворяли потребителей. Поэтому широкого распространения не получил.
А вот благодаря российскому ученому Михаилу Доливо-Доброволь скому в изобретение удалось вдохнуть новую жизнь. Именно ему принадлежит первенство в деле создания первого в мире трехфазного асинхронного мотора. Такое усовершенствование конструкции стало революционным, так как принцип работы трехфазного асинхронного двигателя позволял использовать для работы всего три провода, а не четыре. Так что для плавного пуска устройства в массовое производство препятствий больше не оставалось.
Сегодня, благодаря своей простоте эти машины получили широкое распространение, а механическая характеристика асинхронного двигателя устраивает всех водителей.
Каждый год доля асинхронных двигателей, среди всех двигателей мира, составляет 90%.
Простота в использовании, принцип действия асинхронного двигателя, легкий пуск, надежность и дешевизна, помогли этим моторам распространиться по всему миру и буквально совершить технический переворот в промышленности.
Принцип работы трехфазного двигателя основан на питании от трех фаз переменного тока в стандартной сети. Для работы ему требуется именно такое электричество и поэтому он назван трех фазным.
Устройство трехфазного двигателя
Любой мотор асинхронного типа, независимо от его мощности и размеров, состоит из одних и тех же частей, механическая характеристика асинхронного двигателя также одна и та же. Главными среди составляющих являются:
- статор (неподвижная часть машины)
- ротор (вращающаяся часть)
Помимо этого, в современных трех фазных двигателях можно найти следующие детали:
- вал
- подшипники
- обмотку
- заземление
- корпус (в который монтируются все детали)
Как уже указывалось выше, базовые элементы двигателя — это статор (неподвижная часть) и ротор (подвижная деталь).
Статор выполнен в виде цилиндра, составлен данный элемент из множества металлических, форменных листов. Внутренняя часть создана таким образом, чтобы расположить обмотку. Центры обмоток расположены под углом в 120 градусов, а подключение происходит, исходя из доступного напряжения и двух возможных вариантов: на три или пять контактов.
Ротором называют подвижную часть подобного мотора, которая необходима для плавного пуска. Устройство асинхронного двигателя с фазным ротором является полноценным, ведь именно во вращении ротора состоит основной принцип работы трехфазного мотора.
Принципы, использование которых лежит в работе такого приспособления, как устройство асинхронного двигателя:
- Правило левой руки буравчика.
- Закон электромагнитной индукции Фарадея.
Исходя из типа обмотки, ротор может быть короткозамкнутым или фазным.
Короткозамкнутым называют ротор, состоящий из множества стальных частей. Работа асинхронного двигателя с короткозамкнутым ротором заключается в следующем: в специальные пазы заливают алюминий, формирующий сердцевины, крепящиеся с обеих сторон стопорными кольцами, такая конструкция получила название «беличья клетка». Называется так, потому что замкнута накоротко и в ней не может использоваться сопротивление.
Фазным называют ротор, который обмотан по принципу, аналогичному статору, подходящему для трехфазной сети. Края проводки сердцевины замыкают в звезду, а оставшиеся контакты подводят к контактным частям.
Согласно принципу обратимости, любым фазным асинхронным двигателям свойственна возможность работать в качестве двигателя, генератора или электромагнитного тормоза. Электромеханическая характеристика асинхронного двигателя:
- Двигатель.
- Самый частый вид использования механизма.
- Генератор.
- Действие машины можно обратить, то есть механическую энергию, приложенную к сердцевине можно превратить в электрический ток. Для этого центральной части нужно вращаться быстрей магнитного поля. Потребляя механическую энергию генератор начнет создавать тормозной момент, возвращая электрическую энергию.
- Электромагнитный тормоз.
Изменение порядка чередования фаз приводит к тому, что магнитное поле и сердцевина вращаются в различные стороны, при этом потребляется как механическая энергия, так и напряжение сети, создавая тормозной момент. Собранная энергия приводит к нагреву машины.
Принцип работы трехфазного двигателя
Принцип работы асинхронного двигателя в следующем: подавая напряжение на статор, в его проводке возникает магнитное воздействие, которая благодаря углу размещения осей обмоток, суммируется и создает итоговый, вращающий магнитный поток.
Вращаясь, он создает в проводниках электродвижущую силу. Обмотка сердцевины, создана таким образом, что при включении в сеть, появляется сила, налаживающаяся на действие статора и создающая движение.
Устройство и принцип действия асинхронного двигателя зависит и от сердцевины. Движение сердцевины происходит, когда магнитная сила статора и пусковой момент преодолевают тормозную мощность ротора и внутренняя часть начинает движение, в этот момент проявляется такой показатель, как скольжение.
Скольжение очень важный параметр. В начале движения ротора оно равно 1, но вместе с ростом частоты движения, наблюдается выравнивание, и как следствие снижаются электродвижущие силы и ток в обмотках, это приводит к снижению вращающего момента.
Существует крайний предел скольжения, превышать это значение не стоит, ведь механизм может «опрокинуться», что приведет к нарушению его нормальной работы. Минимальное скольжение происходит на холостых оборотах мотора, при увеличении момента значение будет расти, до наступления критической отметки.
Для создания асинхронной работы нужно сделать так, чтобы напряжение статора и общий магнитный поток соответствовали значению переменного тока.
Во время пуска вектор результирующего магнитного поля неподвижной части плавно вращается с определенной частотой. Через сечение ротора проходит магнитный поток. Электроэнергия, подходящая к двигателю в момент пуска, уходит на перемагничивание статора и ротора.
Стоит заметить, что для электромоторов, в том числе асинхронных свойственно то, что во время пуска в короткий промежуток времени достигается до 150% крутящего момента. Пусковой ток превышает номинальный в 7 раз и из-за этого, в момент пуска падает напряжение во всей электрической сети. Если падение напряжения слишком большое, то даже сам двигатель может не запуститься – таков принцип его действия. Поэтому на практике используют устройство плавного пуска.
Устройство плавного пуска
Устройства плавного пуска асинхронных двигателей имеет свою специфику. Оно используется для плавного пуска или остановки электромагнитных двигателей. Может быть механическим, электромеханичес ким или полностью электронным.
Пусковая характеристика асинхронного двигателя предназначена:
- для плавного разгона асинхронного двигателя
- для плавной остановки
- для снижения тока во время пуска
- для синхронизации нагрузки и крутящего момента
Принцип работы и действия устройства плавного пуска основаны на широкой вариативности переменных. Как следствие, появляются большие возможности для управления режимами работы.
Хорошие и плохие свойства асинхронных моторов
Асинхронный двигатель принцип работы и устройство имеет достоинства и недостатки. Трансформаторы, внутри которых находится вращающийся ротор, используемый для работы двигателя, получили обширное применение так как принцип действия у них простой и понятный, а само устройство работает бесперебойно. Однако и короткозамкнутым и фазным устройствам свойственны определенные недостатки. Причем именно принцип их действия лежит в основе данных минусов.
Плюсы:
- Короткозамкнутым и фазным устройствам свойственна простота конструкции.
- Так как принцип действия очень прост, устройства получаются дешевыми.
- Простота пуска и высокие эксплуатационные характеристики.
- Простота пуска обеспечивает легкое управление.
- Принцип действия и работы таков, что асинхронные моторы могут работать в тяжелых условиях.
Минусы:
- Принцип работы основан на том, что при изменении скорости, теряется мощность.
- Когда увеличивается нагрузка, практически сразу начинает снижаться крутящий момент.
- В момент плавного пуска, мощность асинхронного мотора достаточно низкая.
Стоит отметить, что в настоящее время, отдается предпочтение устройствам с короткозамкнутым ротором. А вот устройства, в которых ротор фазный используются в редких случаях, как правило, когда достигается большая мощность.
Асинхронный двигатель. Устройство и принцип действия однофазного и трехфазного асинхронного электродвигателя.
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Асинхронные двигатели — это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели. Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках. Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.Устройство и принцип действия асинхронных электродвигателей
1. Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра — намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник
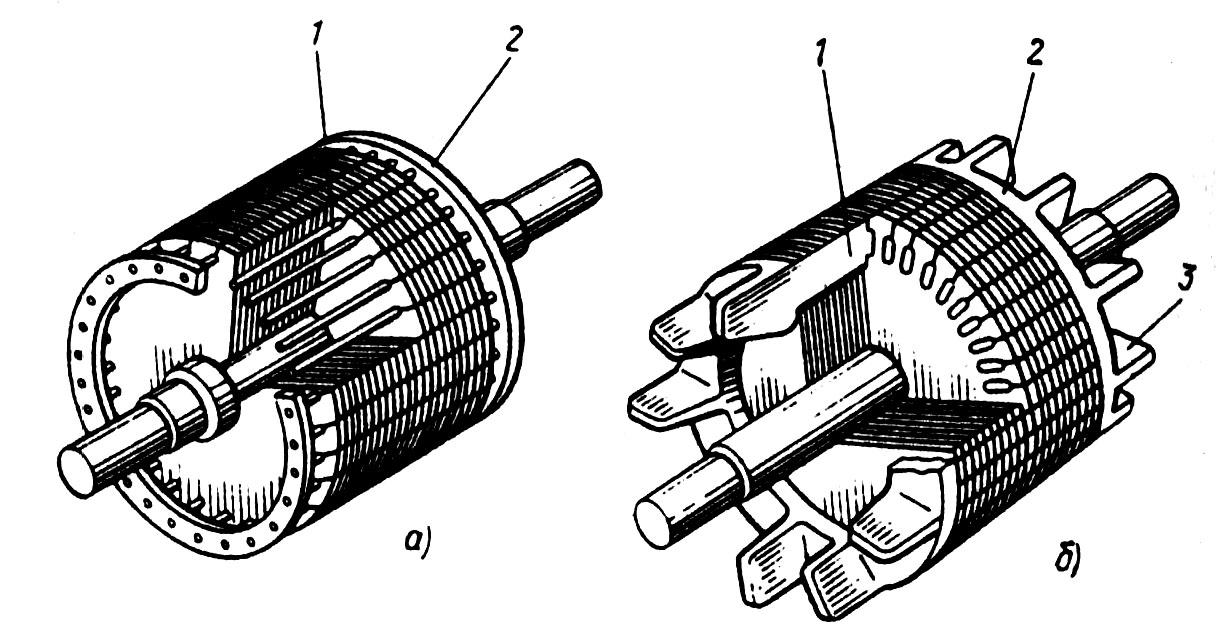
Более подробные сведения о схемах соединения и условных обозначениях начал и концов обмоток представлены ниже. Ротор двигателя состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в которых располагается обмотка ротора. Различают два вида обмоток ротора: фазную и короткозамкнутую. Фазная обмотка аналогична обмотке статора, соединенной в звезду. Концы обмотки ротора соединяют вместе и изолируют, а начала присоединяют к контактным кольцам, располагающимся на валу двигателя. На контактные кольца, изолированные друг от друга и от вала двигателя и вращающиеся вместе с ротором, накладываются неподвижные щетки, к которым присоединяют внешние цепи. Это позволяет, изменяя сопротивление ротора, регулировать скорость вращения двигателя и ограничивать пусковые токи. Наибольшее применение получила короткозамкнутая обмотка типа «беличьей клетки». Обмотка ротора крупных двигателей включает латунные или медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают или приваривают стержни. Для серийных АД малой и средней мощности обмотку ротора изготавливают путем литья под давлением алюминиевого сплава. При этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения условий охлаждения двигателя, затем пакет напрессовывается на вал 3. (рис. 3). На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.
Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения — это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
2. Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита.
Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом — вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
Алиев И.И.
Лекция №9 — Устройство и принцип действия асинхронных электродвигателей
Электрические машины, преобразующие электрическую энергию переменного тока в механическую энергию, называютсяэлектродвигателями переменного тока.
В промышленности наибольшее распространение получилиасинхронные двигатели трехфазного тока. Рассмотрим устройство и принцип действия этих двигателей.
Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля.
Для уяснения работы такого двигателя проделаем следующий опыт.
Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Рисунок 1. Простейшая модель для получения вращающегося магнитного поля
Начнем вращать магнит за ручку по часовой стрелке. Поле магнита также начнет вращаться и при вращении будет пересекать своими силовыми линиями медный цилиндр. В цилиндре, по закону электромагнитной индукции, возникнут вихревые токи, которые создадут свое собственноемагнитное поле — поле цилиндра. Это поле будет взаимодействовать с магнитным полем постоянного магнита, в результате чего цилиндр начнет вращаться в ту же сторону, что и магнит.
Установлено, что скорость вращения цилиндра несколько меньше скорости вращения поля магнита.
Действительно, если цилиндр вращается с той же скоростью, что и магнитное поле, то магнитные силовые линии не пересекают его, а следовательно, в нем не возникают вихревые токи, вызывающие вращение цилиндра.
Скорость вращения магнитного поля принято называть синхронной, так как она равна скорости вращения магнита, а скорость вращения цилиндра — асинхронной (несинхронной). Поэтому сам двигатель получил название асинхронного двигателя. Скорость вращения цилиндра (ротора) отличается от синхронной скорости вращения магнитного поля на небольшую величину, называемую скольжением.
Обозначив скорость вращения ротора через n1 и скорость вращения поля через n мы можем подсчитать величину скольжения в процентах по формуле:
s = (n — n1) / n.
В приведенном выше опыте вращающееся магнитное поле и вызванное им вращение цилиндра мы получали благодаря вращению постоянного магнита, поэтому такое устройство еще не являетсяэлектродвигателем. Надо заставить электрический ток создавать вращающееся магнитное поле и использовать его для вращения ротора. Задачу эту в свое время блестяще разрешил М. О. Доливо-Добровольский. Он предложил использовать для этой цели трехфазный ток.
Устройство асинхронного электродвигателя М. О. Доливо-Добровольского
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемогостатором электродвигателя, помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемыйротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим — подробнее этот процесс.
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки. В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
Если на статоре разместить по окружности шесть обмоток, то будет созданочетырехполюсное вращающееся магнитное поле. При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f, равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60) / 1 = 3000 об/мин,
при четырехполюсном статоре n = (50 х 60) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p: n = (f х 60) / p,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.
Однако отставание ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 — 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
Рассмотрим теперь устройство асинхронных электродвигателей
Асинхронный электродвигатель в разобранном виде: а) статор; б) ротор в короткозамкнутом исполнении; в) ротор в фазном исполнении (1 — станина; 2 — сердечник из штампованных стальных листов; 3 — обмотка; 4 — вал; 5 — контактные кольца)
Статор современного асинхронного электродвигателя имеет невыраженные полюсы, т. е. внутренняя поверхность статора сделана совершенно гладкой.
Чтобы уменьшить потери на вихревые токи, сердечник статора набирают из тонких штампованных стальных листов.Собранный сердечник статора закрепляют в стальном корпусе.
В пазы статора закладывают обмотку из медной проволоки. Фазовые обмотки статора электродвигателя соединяются «звездой» или «треугольником», для чего все начала и концы обмоток выводятся на корпус — на специальный изоляционный щиток. Такое устройство статора очень удобно, так как позволяет включать его обмотки на разные стандартные напряжения.
Ротор асинхронного двигателя, подобно статору, набирается из штампованных листов стали. В пазы ротора закладывается обмотка.
В зависимости от конструкции ротора асинхронные электродвигатели делятся на двигатели с короткозамкнутым ротором и фазным ротором.
Обмотка короткозамкнутого ротора сделана из медных стержней, закладываемых в пазы ротора. Торцы стержней соединены при помощи медного кольца. Такая обмотка называется обмоткой типа «беличьей клетки». Заметим, что медные стержни в пазах не изолируются.
В некоторых двигателях «беличью клетку» заменяют литым ротором.
Асинхронный двигатель с фазным ротором (с контактными кольцами) применяется обычно в электродвигателях большой мощности и в тех случаях; когда необходимо, чтобы электродвигатель создавал большое усилие при трогании с места. Достигается это тем, что в обмотки фазного двигателя включается пусковой реостат.
Короткозамкнутые асинхронные двигатели пускаются в ход двумя способами:
1) Непосредственным подключением трехфазного напряжения сети к статору двигателя. Этот способ самый простой и наиболее популярный.
2) Снижением напряжения, подводимого к обмоткам статора. Напряжение снижают, например, переключая обмотки статора со «звезды» на «треугольник».
Пуск двигателя в ход происходит при соединении обмоток статора «звездой», а когда ротор достигнет нормального числа оборотов, обмотки статора переключаются на соединение «треугольником».
Ток в подводящих проводах при этом способе пуска двигателя уменьшается в 3 раза по сравнению с тем током, который возник бы при пуске двигателя прямым включением в сеть с обмотками статора, соединенными «треугольником». Однако этот способ пригоден лишь в том случае, если статор рассчитан для нормальной работы при соединении его обмоток «треугольником».
Наиболее простым, дешевым и надежным является асинхронный электродвигатель с короткозамкнутым ротором, но этот двигатель обладает некоторыми недостатками — малым усилием при трогании с места и большим пусковым током. Эти недостатки в значительной мере устраняются применением фазного ротора, но применение такого ротора значительно удорожает двигатель и требует пускового реостата.
Типы асинхронных электродвигателей
Основной тип асинхронных машин — трехфазный асинхронный двигатель. Он имеет три обмотки на статоре, смещенные в пространстве на 120°. Обмотки соединяются в звезду или треугольник и питаются трехфазным переменным током.
Двигатели малой мощности в большинстве случаев выполняются какдвухфазные. В отличие от трехфазных двигателей они имеют на статоре две обмотки, токи в которых для создания вращающегося магнитного поля должны быть сдвинуты на угол π/2.
Если токи в обмотках равны по модулю и сдвинуты по фазе на 90°, то работа подобного двигателя ничем не будет отличаться от работы трехфазного. Однако такие двигатели с двумя обмотками на статоре в большинстве случаев питаются от однофазной сети и сдвиг, приближающийся к 90°, создается искусственным путем, обычно за счет конденсаторов.
Однофазный двигатель, имеющий только одну обмотку на статоре, практически неработоспособен. При неподвижном роторе в двигателе создается только пульсирующее магнитное поле и вращающий момент равен нулю. Правда, если ротор такой машины раскрутить до некоторой скорости, то далее она может выполнять функции двигателя.
В этом случае, хотя и будет только пульсирующее поле, но оно слагается из двух симметричных — прямого и обратного, которые создают неравные моменты — больший двигательный и меньший тормозной, возникающий за счет токов ротора повышенной частоты (скольжение относительно обратносинхронного поля больше 1).
В связи с изложенным однофазные двигатели снабжаются второй обмоткой, которая используется как пусковая. В цепь этой обмотки для создания фазового сдвига тока включают конденсаторы, емкость которых может быть достаточно велика (десятки микрофарад при мощности двигателя менее 1 кВт).
В системах управления используются двухфазные двигатели, которые иногда называют исполнительными. Они имеют две обмотки на статоре, сдвинутые в пространстве на 90°. Одна из обмоток, называемая обмоткой возбуждения, непосредственно подключается к сети 50 или 400 Гц. Вторая используется как обмотка управления.
Для создания вращающегося магнитного поля и соответствующего момента ток в обмотке управления должен быть сдвинут на угол, близкий к 90°. Регулирование скорости двигателя, как будет показано ниже, осуществляется изменением значения или фазы тока в этой обмотке. Реверс обеспечивается изменением фазы тока в управляющей обмотке на 180° (переключением обмотки).
Двухфазные двигатели изготовляются в нескольких исполнениях:
-
с короткозамкнутым ротором,
-
с полым немагнитным ротором,
-
с полым магнитным ротором.
Линейные двигатели
Преобразование вращательного движения двигателя в поступательное движение органов рабочей машины всегда связано с необходимостью использования каких-либо механических узлов: зубчатых реек, винта и др. Поэтому иногда целесообразно выполнение двигателя с линейным перемещением ротора-бегунка (название ’’ротор” при этом может быть принято только условно — как движущегося органа).
В этом случае двигатель, как говорят, может быть развернут. Обмотка статора линейного двигателя выполняется так же, как и у объемного двигателя, но только должна быть заложена в пазы на всю длину максимального возможного перемещения ротора-бегунка. Ротор-бегунок обычно короткозамкнутый, с ним сочленяется рабочий орган механизма. На концах статора, естественно, должны находиться ограничители, препятствующие уходу ротора за рабочие пределы пути.
Асинхронный электродвигатель устройство и принцип работы
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.
У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Электродвигатель предназначен для преобразования, с малыми потерями, электрическую энергию в механическую.
Предлагаем рассмотреть принцип действия асинхронного электродвигателя с короткозамкнутым ротором, трехфазного и однофазного типа, а также его конструкцию и схемы подключения.
Строение двигателя
Основные элементы электродвигателя это – статор, ротор, их обмотки и магнитопровод.
Преобразование электрической энергии в механическую происходит во вращающейся части мотора — роторе.
У двигателя переменного тока, ротор получает энергию не только за счет магнитного поля, но и при помощи индукции. Таким образом, они называются асинхронными двигателями. Это можно сравнить с вторичной обмоткой трансформатора. Эти асинхронные двигатели еще называют вращающимися трансформаторами. Чаще всего используется модели рассчитанные на трех фазное включение.
Конструкция асинхронного двигателя
Направление вращения электродвигателя задается правилом левой руки буравчика: оно демонстрирует связь между магнитным полем и проводником.
Второй очень важный закон – Фарадея:
- ЭДС наводиться в обмотке, но электромагнитный поток меняется во временем.
- Величина наведенной ЭДС прямо пропорциональна скорости изменения электрического потока.
- Направление ЭДС противодействует току.
Принцип действия
При подаче напряжения на неподвижные обмотки статора, оно создает магнитное в статора. Если подается напряжение переменного тока, то магнитный поток, созданный им, изменяется. Так статор производит изменение магнитного поля, и ротор получает магнитные потоки.
Таким образом, ротор электродвигателя принимает эти поток статора и, следовательно, вращается. Это основной принцип работы и скольжения в асинхронных машинах. Из вышеизложенного следует отметить, что магнитный поток статора (и его напряжение) должно быть равно переменному току для вращения ротора, так что асинхронная машина может работать только от сети переменного тока.
Принцип работы асинхронного двигателя
Когда такие двигатели действуют в качестве генератора, они будет генерировать непосредственно переменный ток. В случае такой работы, ротор вращается с помощью внешних средств скажем, турбины. Если ротор имеет некоторый остаточный магнетизм, то есть некоторые магнитные свойства, которые сохраняет по типу магнита внутри материала, то ротор создает переменный поток в стационарной обмотке статора. Так что это обмотки статора будут получать наведенное напряжение по принципу индукции.
Индукционные генераторы используются в небольших магазинах и домашних хозяйствах, чтобы обеспечить дополнительную поддержку питания и являются наименее дорогостоящими из-за легкого монтажа. В последнее время они широко используется людьми в тех странах, где электрические машины теряют мощность из-за постоянных перепадов напряжения в питающей электросети. Большую часть времени, ротор вращается при помощи небольшого дизельного двигателя соединенного с асинхронным генератором переменного напряжения.
Как вращается ротор
Вращающийся магнитный поток проходит через воздушный зазор между статором, ротором и обмоткой неподвижных проводников в роторе. Этот вращающийся поток, создает напряжение в проводниках ротора, тем самым заставляя наводиться в них ЭДС. В соответствии с законом Фарадея электромагнитной индукции, именно это относительное движение между вращающимся магнитным потоком и неподвижными обмотками ротора, которые возбуждает ЭДС, и является основой вращения.
Двигатель с короткозамкнутым ротором, в котором проводники ротора образовывают замкнутую цепь, в следствии чего возникает ЭДС наводящая ток в нем, направление задается законом Ленса, и является таким, чтобы противодействовать причине его возникновения. Относительное движение ротора между вращающимся магнитным потоком и неподвижным проводником и является его действием к вращению. Таким образом, чтобы уменьшить относительную скорость, ротор начинает вращаться в том же направлении, что и вращающийся поток на обмотках статора, пытаясь поймать его. Частота наведенной на него ЭДС такая же, как частота питания.
Гребневые асинхронные двигатели
Когда напряжение питания низкое, возбуждение обмоток короткозамкнутого ротора не происходит. Это обусловлено тем что, когда число зубцов статора и число зубьев ротора равное, таким образом вызывая магнитную фиксацию между статором и ротором. Этот физический контакт иначе называется зубо-блокировкой или магнитной блокировкой. Данная проблема может быть преодолена путем увеличения количества пазов ротора или статора.
Подключение
Асинхронный двигатель можно остановить, просто поменяв местами любые два из выводов статора. Это используется во время чрезвычайных ситуаций. После он изменяет направление вращающегося потока, который производит вращающий момент, тем самым вызывая разрыв питания на роторе. Это называется противофазным торможением.
Видео: Как работает асинхронный двигатель
Для того чтобы этого не происходило в однофазном асинхронном двигателе, необходимо использование конденсаторного устройства.
Его нужно подключить к пусковой обмотке, но предварительно обязательно проводится его расчет. Формула
QC = Uс I 2 = U 2 I 2 / sin 2
Схема: Подключение асинхронного двигателя
Из которой следует, что электрические машины переменного тока двухфазного или однофазного типа, должны снабжаться конденсаторами с мощностью, равной самой мощности двигателя.
Аналогия с муфтой
Рассматривая принцип действия асинхронного электродвигателя, используемого в промышленных машинах, и его технические характеристики, нужно сказать про вращающуюся муфту механического сцепления . Крутящий момент на валу привода должен равняться крутящему моменту на ведомом валу. Кроме того, следует подчеркнуть, что эти два момента являются одним и тем же, поскольку крутящий момент линейного преобразователя вызывается трением между дисков внутри самой муфты.
Электромагнитная муфта сцепления
Похожий принцип действия и у тягового двигателя с фазным ротором. Система такого мотора состоит из восьми полюсов (из которых 4 – основные, а 4 – добавочные), и остовы. На основных полюсах расположены медные катушки. Вращение такого механизма обязано зубчатой передаче, которая получает крутящий момент от вала якоря, так же называемого сердечником. Включение в сеть, производится четырьмя гибкими кабелями. Основное назначение многополюсного электродвигателя – приведение в движение тяжелой техники: тепловозы, тракторы, комбайны и в некоторых случаях, станки.
Достоинства и недостатки
Устройство асинхронного двигателя является практически универсальным, но так же, у данного механизма есть свои плюсы и минусы.
Преимущества асинхронных двигателей переменного тока:
- Конструкция простой формы.
- Низкая стоимость производства.
- Надежная и практичная в обращении конструкция.
- Не прихотлив в эксплуатации.
- Простая схема управления
Эффективность этих двигателей очень высока, так как нет потерь на трение, и относительно высокий коэффициент мощности.
Недостатки асинхронных двигателей переменного тока:
- Не возможен контроль скорости без потерь мощности.
- Если увеличивается нагрузка – уменьшается момент.
- Относительно небольшой пусковой момент.
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени tток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени tповернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с tдо t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойnкоторая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n от р и f представлена в табл.5.2.
Принцип работы асинхронного двигателя с короткозамкнутым ротором
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
Асинхронный двигатель – принцип работы и устройство
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель – это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство
На рисунке: 1 – вал, 2,6 – подшипники, 3,8 – подшипниковые щиты, 4 – лапы, 5 – кожух вентилятора, 7 – крыльчатка вентилятора, 9 – короткозамкнутый ротор, 10 – статор, 11 – коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется “беличьей клеткой“. В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье – асинхронный двигатель с фазным ротором.
Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s – это величина, которая показывает, насколько синхронная частота n1 магнитного поля статора больше, чем частота вращения ротора n2, в процентном соотношении.
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр – критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме – 1 – 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
{SOURCE}
Режимы и принцип работы асинхронного электродвигателя
Асинхронно – слово греческого происхождения (ασύγχρονα, где: α- отрицание, σύγ — вместе, χρονα – время), используется в русском языке для обозначения (наименования) процессов не совпадающих во времени.
Асинхронной, в электротехнике, принято называть машину, в процессе работы которой частота вращения ротора не равна частоте изменения магнитного поля создаваемого обмотками статора, вызывающего это вращение.
К асинхронным электрическим машинам относятся: асинхронные двигатели с короткозамкнутым ротором, асинхронные двигатели с фазным ротором, асинхронные микродвигатели общего применения, асинхронные тахогенераторы и другие, работающие по тому же принципу. Асинхронные электрические машины очень широко распространены благодаря таким качествам как: высокая надёжность, относительно низкая стоимость, приемлемые габариты и вес, просты в обслуживании. С появлением современных частотных преобразователей значительно расширился спектр применения асинхронных электродвигателей, благодаря возможности довольно просто и оптимально реализовывать такие функции как управление по скорости и моменту, вплоть до решения задач позиционирования. Не удивительно, что асинхронные двигатели применяются повсюду, особенно это касается асинхронных электродвигателей, объём выпуска которых занимает около 90% общего объёма мирового выпуска электрических машин.
Принцип действия и режимы работы
Рассмотрим принцип работы асинхронного электродвигателя с помощью электромагнитной схемы (рис.1,а), которая отличается от электромагнитной схемы трансформатора тем, что неподвижный статор 1 представляет собой первичную обмотку, а вращающийся ротор 3 – вторичную. Магнитная связь между ротором и статором зависит от величины воздушного зазора между ними, поэтому, при изготовлении машины, в большинстве случаев, его стараются делать как можно меньше. На статоре расположена обмотка 2, катушки которой размещаются равномерно по его окружности. Обмотку статора (фазы A-X , B-Y, C-Z ) выполняют трёхфазной, или в общем случае многофазной, и соединяют её фазы в Y (звезду) или в (треугольник), что оказывает существенное влияние на такие характеристики как: мощность, плавность хода, величины пусковых токов и других параметров. Обмотку ротора а-x, b-y, c-z также выполняют трёхфазной или многофазной и тоже равномерно размещают по его окружности. В простейшем случаях включения, фазы ротора а-x, b-y, c-z, замыкают накоротко (см. рис. 1,б).
Рис.1. Электромагнитная схема асинхронного двигателя (а – направление электромагнитного момента при работе в режиме двигателя, б – подключение к сети трёхфазного тока) , где: 1- неподвижный статор; 2- обмотка статора; 3- вращающийся ротор; 4- обмотка ротора.Когда обмотки статора асинхронной электрической машины подключены к сети трехфазного тока, в нём создаётся вращающееся магнитное поле, частота вращения которого (n1) синхронна с частотой сети, питающей эти обмотки, и вычисляется по формуле:
n1 = 60 x f1 / p
где: n1 – частота вращения магнитного поля статора; f1 – частота сети; p – число пар полюсов обмоток статора.
Вращающееся магнитное поле индуктирует в проводниках ротора электрической машины ЭДС, что вызывает прохождение по ним тока, взаимодействие которого с магнитным потоком создаёт электромагнитный момент. Направление ЭДС, индуктированной в проводниках обмоток ротора, показано на рисунке 1, а согласно правилу правой руки, для случая, когда вращении магнитного потока (Ф) происходит по часовой стрелке. Крестики и точки на рисунке показывают направление активной составляющей тока ротора, совпадающего по фазе с индуктированной ЭДС.
Известно, что если проводники с током расположить в магнитном поле, то на них будут действовать электромагнитые силы, направление которых можно определить при помощи правила левой руки. Приложенное к каждому проводнику ротора суммарное усилие (Fрез), создаёт электромагнитный момент (М), который “увлекает” ротор за вращающимся магнитным полем, создаваемым обмотками статора.
Ротор вращается, если величина момента (М) достаточна для преодоления внутренних сил трения (подшипники, сопротивление воздуха и так далее), а также тормозного момента, приложенного к валу от приводимого во вращение механизма, если таковой имеется. Установившаяся частота вращения ротора (n2) зависит от соотношения вышеперечисленных сил и создаваемых ими моментов. Очевидно, что при этом будет выполняться соотношение:
0 ≤ n2 <n1. Такой режим работы асинхронного электродвигателя называется двигательным. Разность частот n1 (вращения магнитного поля) и n2 (вращения ротора), выраженную в относительных единицах, принято называть скольжением. Наверное потому, что вращающееся магнитное поле статора “скользит” по обмоткам ротора “увлекая” ротор за собой, подобно скольжению потоков жидкости или воздуха по лопастям турбин гидравлических или пневматических машин.
Скольжение определяют по формуле:
где: s – скольжение; n1 – частота магнитного поля статора; n2 – частота вращения ротора. Скольжение также может быть представлено и в процентном соотношении:
Поскольку, при двигательном режиме выполняется соотношение 0 ≤ n2 <n1, то очевидно, что скольжения для этого режима будет находиться в пределах 1≥ S >0 (или 100%≥ S >0%).
Но асинхронная электрическая машина может работать и в других режимах. Если её ротор разогнать до частоты превышающей частоту магнитного поля статора (то есть n2>n1) при помощи внешнего момента другого механизма (например механически соединить с двигателем, вал которого вращается быстрее), то изменятся направление ЭДС и активной составляющей тока в проводниках обмотки ротора, что вызовет переход машины в генераторный режим работы (рис.2,а). Электромагнитный момент (М), при этом, становится тормозящим изменив своё направление, а электрическая машина, получая механическую энергию от внешнего источника, превращает её в электрическую и отдаёт в сеть, питающую обмотки статора. В генераторном режиме выполняются соотношения: n2>n1, S<0.
Если в момент работы асинхронного электродвигателя в двигательном режиме (когда 0 ≤ n2 <n1, а 1≥S >0) изменить направление вращения магнитного поля статора (например, изменив схему подключения обмоток статора к питающей сети с помощью магнитных пускателей), так чтобы магнитное поле статора стало вращаться противоположно направлению вращения ротора, то машина перейдёт в режим электромагнитного торможения (рис.2,б). При этом, ЭДС и активная составляющая тока в проводниках обмотки ротора будут сохранять (до определённого момента) то же направление, что и в прежнем двигательном режиме. Машина будет продолжать получать энергию от питающей сети, но эта энергия будет направлена на торможение вращения ротора. Электромагнитный момент (М), в данном режиме, как результат взаимодействия электромагнитных сил, направлен против вращения ротора и является тормозящим.
Рис.2. Направление электромагнитного момента в асинхронной машине (а – при работе в генераторном режиме; б – при работе в режиме электромагнитного торможения).На практике, асинхронные двигатели чаще всего работают в двигательном режиме, что, в свою очередь, довольно часто не исключает применений режима электромагнитного торможения электродвигателей.
Итого, кратко повторим, асинхронный электродвигатель работает только при наличии скольжения, то есть неравенстве частот n1 и n2. Только в этом случае в обмотках ротора сможет индуктироваться ЭДС, и как следствие, возникать электромагнитный момент. Поскольку ротор вращается не синхронно с полем статора, машину называют асинхронной.
Устройство асинхронного электродвигателя
Устройство и принцип действия асинхронных электродвигателей
Всем привет. Рад вас видеть у себя на сайте. Тема сегодняшней статьи: устройство и принцип действия асинхронных электродвигателей. Так же я бы хотел немного сказать о способах регулировки их частоты вращения, и перечислить их основные преимущества и недостатки.
Раньше, я уже писал статьи, касающиеся асинхронных электродвигателей. Если кому интересно, то можете почитать. Вот список:
Схема пуска асинхронного двигателя.
Расчёт тока электродвигателя.
Реверсивное управление асинхронным электродвигателем с короткозамкнутым ротором.
Ну а теперь давайте перейдём к теме сегодняшней статьи.
В нынешнее время, очень трудно представить, как бы существовали все промышленные предприятия, если бы не было асинхронных машин. Эти двигателя установлены практически везде. Даже дома у каждого человека есть такой двигатель. Он может стоять на вашей стиральной машинке, на вентиляторе, на насосной станции, в вытяжке и так далее.
Вообще асинхронный электродвигатель – это колоссальный прорыв в мировой промышленности. Во всём мире их выпускают более 90 процентов от количества всех выпускаемых двигателей.
Асинхронный электродвигатель – это электрическая машина, которая преобразовывает электрическую энергию в механическую. То есть потребляет электрический ток, а взамен дают крутящий момент, с помощью которого можно вращать многие агрегаты.
А само слово «асинхронный» — означает неодновременных или не совпадающий по времени. Потому что у таких двигателей частота вращения ротора немного отстаёт от частоты вращения электромагнитного поля статора. Ещё это отставанием называют – скольжением.
Обозначается это скольжение буквой: S
А вычисляется скольжение по такой формуле: S = ( n1 — n2 )/ n1 — 100%
Где, n1 – это синхронная частота магнитного поля статора;
n2 – это частота вращения вала.
Устройство асинхронного электродвигателя.
Двигатель состоит из таких частей:
1. Статор с обмотками. Или станина внутри которой находится статор с обмотками.
2. Ротор. Это если короткозамкнутый. А если фазный, то можно сказать, что это якорь или даже коллектор. Я думаю, ошибки не будет.
3. Подшипниковые щиты. На мощных двигателях ещё спереди стоят подшипниковые крышки с уплотнителями.
4. Подшипники. Могут стоять скольжения или качения, в зависимости от исполнения.
5. Вентилятор охлаждения. Изготавливается из пластмассы или металла.
6. Кожух вентилятора. Имеет прорези для подачи воздуха.
7. Борно или клеммная коробка. Для подключения кабелей.
Это все его основные детали, но в зависимости от вида, типа и исполнения может немного изменяться.
Асинхронные электродвигателя в основном выпускают двух видов: трёхфазные и однофазные. В свою очередь трёхфазные ещё подразделяются на подвиды: с короткозамкнутым ротором или фазным ротором.
Самые распространённые – это трёхфазные с короткозамкнутым ротор.
Статор имеет круглую форму и набирается с листов специальной стали, которые изолированы между собой, и эта собранная конструкция образует сердечник с пазами. В пазы сердечника укладываются обмотки, со специального обмоточного, изолированного лаком провода. Провод это отливают в основном из меди, но также есть и с алюминия. Если двигатель очень мощный, то обмотки делаю шиной. Обмотки укладывают так, чтобы они были сдвинуты относительно друг друга на 120 градусов. Соединяются обмотки статора в звезду или в треугольник.
Ротор, как выше я уже писал выше, бывает короткозамкнутый или фазный.
Короткозамкнутый представляет собой вал, на который надеваются листы, из тоже специальной, стали. Эти наборные листы образую сердечник, в пазы которого заливают расплавленный алюминий. Этот алюминий равномерно растекается по пазам и образует стержни. А по краям эти стержни замыкают алюминиевыми кольцами. Получается своего рода «беличья клетка».
Фазный ротор представляет собой вал с сердечником и тремя обмотками. Одни концы, которых обычно соединяют в звезду, а вторые три конца присоединяют к токосъемным кольцам. А на эти кольца, с помощью щёток подают электрический ток.
Если в цепь фазных обмоток добавить нагрузочный реостат, и при пуске двигателя увеличивать активное сопротивление, то таким способ можно уменьшить большие пусковые токи.
Принцип действия.
Когда на обмотки статора подаются электрический ток, то в этих обмотках возникает электрический поток. Как вы помните, из выше написанных слов, фазы у нас смещены относительно друг друга на 120 градусов. И вот этот поток в обмотках начинает вращаться.
И при вращении магнитного потока статора, в обмотках ротора появляется электрический ток, и своё магнитное поле. Два этих магнитных поля начинают взаимодействовать и заставляют вращаться ротор электродвигателя. Это если ротор короткозамкнутый.
По принципу роботы вот посмотрите видео ролик.
Ну а с фазным ротором, по сути, принцип тот же. Напряжение подаётся на статор и на ротор. Появляются два магнитных поля, которые начинают взаимодействовать и вращать ротор.
Достоинства и недостатки асинхронных двигателей.
Основные достоинства асинхронного электродвигателя с короткозамкнутым ротором:
1. Очень простое устройство, что позволяет сократить затраты на его изготовление.
2. Цена намного меньше по сравнению с другими двигателями.
3. Очень простая схема запуска.
4. Скорость вращения вала практически не меняется с увеличением нагрузки.
5. Хорошо переносит кратковременные перегрузы.
6. Возможность подключения трёхфазных двигателей в однофазную сеть.
7. Надёжность и возможность эксплуатировать практически в любых условиях.
8. Имеет очень высокий показатель КПД и cos φ.
Недостатки:
1. Не возможности контролировать частоту вращения ротора без потери мощности.
2. Если увеличить нагрузку, то уменьшается момент.
3. Пусковой момент очень мал по сравнению с другими машинами.
4. При недогрузе увеличивается показатель cos φ
5. Высокие показатели пусковых токов.
Достоинства двигателей с фазным ротором:
1. По сравнению с короткозамкнутыми двигателями, имеет достаточно большой вращающий момент. Что позволяет его запускать под нагрузкой.
2. Может работать с небольшим перегрузом, и при этом частота вращения вала практически не меняется.
3. Небольшой пусковой ток.
4. Можно применять автоматические пусковые устройства.
Недостатки:
1. Большие габариты.
2. Показатели КПД и cos φ меньше, чем у двигателей с короткозамкнутым ротором. И при недогрузе эти показатели имеют минимальное значение
3. Нужно обслуживать щёточный механизм.
На этом буду заканчивать свою статью. Если она была вам полезной, то поделитесь нею со своими друзьями в социальных сетях. Если есть вопросы, то задавайте их в комментариях и подписывайтесь на обновления. Пока.
С уважением Александр!
5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени t0ток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t0, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени t0повернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с t0до t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойn0которая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n0 от р и f представлена в табл.5.2.
Таблица 5.2
| f = 50 Гц | Р | 1 | 2 | 3 | 4 | 5 | 6 |
| n0, об/мин | 3000 | 1500 | 1000 | 750 | 600 | 500 | |
| р=1 | f. ГЦ | 50 | 100 | 200 | 400 | 500 | 1000 |
Круговое вращающееся магнитное поле характеризуется тем, что пространственный вектор магнитной индукции этого поля Во вращается равномерно (n0= const).
При необходимости изменить направление вращения магнитного поля статора нужно поменять порядок следования токов в фазных обмотках статора, для чего переключают фазы на зажимах двигателя (рис.5.6).
Рис.5.6. Изменение направления вращения магнитного поля.
Устройство и принцип работы асинхронного двигателя
Немало техники — бытовой, строительной, производственной имеют двигатели. Если задаться целью и проверить тип мотора, в 90% окажется, что стоит асинхронный двигатель. Это обусловлено простотой конструкции, высоким КПД, отсутствием электрического контакта с движущейся частью (в моделях с короткозамкнутым ротором). В общем, причин достаточно.
Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.
Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.
Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.
Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).
Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Асинхронный двигатель с фазным ротором
Для фиксации ротора к корпусу статора делают две крышки с подшипниками. На одной из крышек закрепляются щетки, которые прижимаются к кольцам на валу, за счёт чего имеют с ними хороший контакт. Для регулировки скорости вращения щетки соединены с реостатом. Изменяя его сопротивление, меняем напряжение, а с ним и скорость вращения.
Что лучше короткозамкнутый или фазный?
Несмотря на то что двигатели с фазовым ротором лучше стартуют, позволяют в процессе работы плавно менять скорость при помощи обычного реостата, чаще применяется моторы короткозамкнутого типа. В этой конструкции отсутствуют щетки, которые выходят из строя первыми. Кроме того, более простое устройство подвижной части снижает стоимость двигателя, агрегат служит дольше, уход и техобслуживание проще.
Какой лучше: короткозамкнутый ротор или фазный
Тем не менее стоит более подробно ознакомиться с достоинствами и недостатками обоих типов асинхронных двигателей. Итак, достоинства короткозамкнутого асинхронного двигателя:
- Простая конструкция.
- Лёгкое обслуживание.
- Более высокий КПД.
- Нет искрообразования.
Недостатки:
Из-за высокого пускового тока прямое включение допускается для двигателей мощностью до 200 кВт. Более мощные требуют пускорегулирующей аппаратуры. Обычно используют частотный преобразователь, который плавно увеличивает ток, обеспечивая плавный старт без перегрузок.
Преимущество асинхронного фазного двигателя:
- Быстрый и беспроблемный старт.
- Позволяет менять скорость в процессе работы.
- Прямое подключение возможно, практически без ограничения мощности.
Недостатки тоже есть: наличие щёток, возможность искрения, сложное и частое обслуживание.
Как регулируется частота вращения
Как уже писали, частота вращения ротора зависит от количества полюсов статора. Чем больше количество полюсов, тем меньше скорость. Но это не только так можно регулировать скорость вращения. Она еще зависит от напряжения и частоты питания.
Способы регулирования частоты асинхронного двигателя
Напряжение можно регулировать, установив потенциометр на входе. Частоту регулируют поставив частотный преобразователь. Частотник — более выгодное решение, так как он ещё и снижает стартовые токи и может быть программируемым.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Асинхронный двигатель: принцип работы и устройство :
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.
Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.
Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.
У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи
Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Асинхронный двигатель: принцип работы, особенности конструкции
Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Оглавление:
- Область применения
- Разновидности моторов
- Устройство асинхронного двигателя
- Особенности устройства каждого из элементов
- Ротор
- Принцип работы
- Маркировка электродвигателя
- Скольжение
- Двигателя с фазным ротором
- Недостатки асинхронных электродвигателей
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
- Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
Разновидности моторов
От типа питающей сети асинхронные электродвигатели подразделяются на:
- Трехфазные. Обмотки асинхронных двигателей такого типа состоят из 3 катушек, специальным образом уложенных в пазах статора. Они предназначены для работы в промышленности, так как имеют высокий КПД и cosφ приближенный к 1, а для обеспечения дополнительной экономии работают с системой рекуперации энергии при торможении, выступая генератором.
- Однофазный асинхронный двигатель. Применяется в быту и промышленности: старые стиральные машины, бытовые вентиляторы, холодильное и прочие виды оборудования. Имеют меньший КПД, мощность, по сравнению с трехфазными, что объясняется потерями в статоре из-за отсутствия дополнительной фазы.
Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Особенности устройства каждого из элементов
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор запрессован в корпус либо же расположен между фланцами. Корпус и боковые крышки изготовлены из чугуна или сплава алюминия. На них имеются ребра для увеличения площади и повышения эффективности отведения тепла при работе. Такое устройство позволяет лучше охлаждать двигатель, обеспечивая продолжительную работу при предельных нагрузках.
Однополюсная обмотка такого электродвигателя наматывается из 3-х катушек. Каждая из них называется фазой. Для достижения требуемых параметров работы мотора обмотка укладывается в противоположных пазах сердечника. Катушки соединяются между собой специальным образом в соответствии со схемой подключения и ожидаемых характеристик, обеспечивая возбуждение магнитного поля и необходимый момент при вращении.
Все концы датчиков выводятся в клеммную коробку, что позволяет их соединять в звезду или треугольник, что зависит от схемы подключения системы управления, величины питания. 3-фазный электродвигатель является универсальным, при необходимости его можно подключать к однофазному питанию с линейным напряжением. При соединении обмоток треугольником напряжение обмоток равно линейному Uф, а при подключении по схеме звезды – √3Uф.
Ротор
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Принцип работы
Асинхронный двигатель принцип работы имеет достаточно простой. Он основан на двух физических явлениях:
- При подаче напряжения на статорные обмотки в двигателе возникает вращающееся магнитное поле.
- Поле оказывает воздействие на ток, индуцируемый в роторе. А это создает крутящий момент, поворачивающий вал двигателя относительно полюсов.
За каждый поворот вала полюса меняются полярностью с частотой сети. Поэтому напряжение обмотки статора имеет стандартную частоту, а скорость вращения зависит от:
- нагрузки на валу;
- количества пар полюсов;
- особенностей намотки статора.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Скольжение
При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
Скольжение позволяет объяснить принцип работы. За счет отставания частоты вращения ротора от магнитного поля статора и обеспечивается наведение ЭДС в короткозамкнутом роторе. Но если бы поле вращалось со скоростью частоты ЭДС в роторе, то собственно вращения не происходило.
Скольжение, являясь относительной величиной, измеряется в %. И становится больше при увеличении нагрузки на валу двигателя.
Двигателя с фазным ротором
Когда речь идет о моторах с фазным ротором, то он имеет немного иное устройство. Также имеется 3 обмотки, которые соединены в звезду, а их начала выведены на подводящие кольца. Сравнивая два типа двигателя с короткозамкнутым и фазным роторами, то у второго развивается момент сразу же под высокой нагрузкой. Такие моторы получили применение в системах, где требуется сделать мощный приводной агрегат с высокой тягой. Также такие моторы являются более удобными для регулируемого управления посредством регулятора частоты.
Недостатки асинхронных электродвигателей
В стандартном исполнении без магнитов на роторе асинхронные электродвигатели являются маломощными. Они неспособны сразу обеспечить высокий крутящий момент. А также для их запуска требуется большое количество электрической мощности, которая может превышать предельно допустимые показатели системы питания. Поэтому их пуск должен выполняться без нагрузки. Кроме этого, асинхронные электродвигатели являются мощными источниками электромагнитных помех, сопровождающимися сбоями в работе различных других устройств, находящихся вблизи. Для снижения их влияния необходимо предусматривать качественное заземление и обязательное экранирование.
Принцип работы асинхронного двигателя— StudiousGuy
Асинхронные двигатели — одно из величайших изобретений в истории человечества. На ее долю приходится около 45% от общего потребления электроэнергии во всем мире, это повсеместная технология в современном мировом машиностроении. Фактически, всемирно известная корпорация по производству электромобилей Tesla назвала свою организацию в честь изобретателя асинхронного двигателя Николы Тесла. Асинхронный двигатель — это электродвигатель с приводом от переменного тока (AC), который использует электромагнитную индукцию для преобразования электрической энергии в механическую.Он также известен как асинхронный двигатель, поскольку частота вращения двигателя обычно меньше и не синхронизируется с частотой входного переменного тока. Асинхронные двигатели имеют несколько преимуществ по сравнению с аналогичными двигателями постоянного тока, такие как более низкая стоимость конструкции и обслуживания, простота эксплуатации, более высокая скорость, долговечность и т. Д., Что делает их более пригодными для использования. Чтобы понять принцип работы асинхронного двигателя, давайте сначала разберемся, в каких частях он является отличной машиной.
Указатель статей (Нажмите, чтобы перейти)
Компоненты асинхронного двигателя
Асинхронный двигатель может быть разных форм и размеров, но чаще всего это цилиндрическое устройство с торчащим из него осевым валом.Вращательное действие вала осуществляется за счет особого расположения следующих компонентов.
Статор
Статор асинхронного двигателя представляет собой полый цилиндрический сердечник, состоящий из многослойных и многослойных тонких металлических листов. Это неподвижная часть с прорезями для намотки катушки электромагнитной цепи двигателя. Многослойная структура статора используется для предотвращения потерь на вихревые токи и гистерезиса, которые в противном случае возникли бы с твердым сердечником.Катушка статора, также известная как обмотка статора, сделана из медных проводов, изолированных эмалью, лаком или смолами, чтобы избежать короткого замыкания.
Ротор
Ротор — это вращающаяся часть асинхронного двигателя. Это цилиндрический блок, установленный на валу, который несет механическую нагрузку. При производстве асинхронных двигателей используются два типа роторов.
Ротор с беличьей клеткой
Ротор с короткозамкнутым ротором — один из наиболее широко используемых роторов в производстве асинхронных двигателей из-за его исключительных характеристик, таких как надежность, прочность и низкая стоимость производства.Он получил свое название от своей цилиндрической конструкции в виде клетки, состоящей из продольных токопроводящих стержней, изготовленных из алюминия или меди, закороченных накоротко с кольцами, выполненными из того же материала на обоих концах. Стержни ротора слегка перекошены, чтобы они не блокировались зазорами между катушками статора, обеспечивая плавное и бесшумное вращение. Кроме того, количество стержней не должно равняться целому кратному числу пазов статора, так как это может вызвать магнитную блокировку обоих компонентов.
Ротор с обмоткой
Ротор с обмоткой, также известный как ротор с контактным кольцом, представляет собой цилиндрический блок, сделанный из тонких многослойных стальных листов, уложенных друг на друга, и на его периферии есть прорези для удержания вращающихся обмоток. Концы вращающихся обмоток соединены с тремя контактными кольцами, размещенными вокруг вала. Контактные кольца соединены с батареями переменного сопротивления через щетки, что позволяет оператору изменять скорость двигателя, изменяя сопротивление.
Вал
Вал представляет собой длинный стержень из углеродистой стали, расположенный вдоль цилиндрической оси асинхронного двигателя. Это элемент, который обеспечивает преобразованную механическую энергию для конечного использования. Головка вала соединена с различными механическими нагрузками, такими как шкивы, шестерни и т. Д., Тогда как задняя часть соединена с вентилятором внутри двигателя.
Подшипники
Вал ротора удерживается подшипниками на обоих концах корпуса двигателя. Подшипники минимизируют трение вала, соединенного с корпусом, повышая эффективность двигателя.Корпус асинхронного двигателя содержит все компоненты двигателя, обеспечивает электрические соединения и обеспечивает вентиляцию деталей двигателя для уменьшения тепловыделения. Конструкция корпуса часто включает ребра для отвода тепла.
Вентилятор
Вентилятор в асинхронном двигателе действует как вытяжка и охлаждает асинхронный двигатель, рассеивая тепло. Он соединен с валом, который передает вращательное движение ротора на вентилятор.
Кожух
Кожух асинхронного двигателя содержит все компоненты двигателя, обеспечивает электрические соединения и обеспечивает вентиляцию деталей двигателя для уменьшения тепловыделения.Конструкция корпуса часто включает ребра для отвода тепла.
Принцип работы асинхронного двигателя
Асинхронный двигатель работает по принципу электромагнитной индукции. Это явление, при котором ЭДС индуцируется поперек проводника, когда он находится внутри переменного магнитного поля. Эта индуцированная ЭДС в катушке задается законом электромагнитной индукции Фарадея, который гласит, что электродвижущая сила вокруг замкнутого пути равна отрицательной скорости изменения во времени магнитного потока, заключенного на этом пути.Математически это выражение можно записать как
ε = — \ frac {dΦ} {dt}Где ε — наведенная ЭДС, Φ — магнитный поток, а t обозначает время.
Взаимодействие между двумя магнитными полями заставляет ротор вращаться. Чтобы понять концепцию более подробно, давайте посмотрим на работу асинхронного двигателя.
Работа асинхронного двигателя
Когда переменный ток течет через обмотки статора, он создает магнитное поле вокруг катушек обмоток.Катушки внутри статора расположены таким образом (пространственно разнесены на 120 °), что создаваемое ими магнитное поле начинает вращаться вследствие периодически меняющегося направления входного переменного тока. Вращающееся магнитное поле индуцирует ток, который течет через замкнутые обмотки ротора. Затем течение тока создает обратную ЭДС, которая противодействует изменению магнитного поля, создаваемого обмотками статора. Обратная ЭДС обмоток ротора отстает на 90 градусов (без нагрузки) от ЭДС обмоток статора.Эта разница в силе создает крутящий момент и заставляет ротор вращаться вокруг оси вала. Задержка также заставляет обмотки ротора вращаться немного медленнее, чем вращающееся поле. Разница между скоростью известна как «проскальзывание» в технических терминах и может варьироваться в зависимости от нескольких факторов, таких как нагрузка на двигатель, сопротивление цепи ротора и сила магнитного поля, создаваемого двигателем. статор. Асинхронный двигатель работает аналогично трансформатору, причем первичная и вторичная обмотки являются обмотками статора и ротора соответственно.Асинхронный двигатель также известен как вращающийся трансформатор из-за вращательного движения обмоток ротора. Работа асинхронных двигателей может различаться в зависимости от их типа.
Типы асинхронных двигателей
Асинхронные двигателив основном подразделяются на две категории в зависимости от источника питания, с которым они работают, то есть трехфазные асинхронные двигатели и однофазные асинхронные двигатели.
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель — один из наиболее часто используемых асинхронных двигателей в промышленных и коммерческих целях.Как следует из названия, трехфазные асинхронные двигатели — это те, которые работают от трехфазного источника переменного тока. Чтобы понять принцип работы трехфазного асинхронного двигателя, необходимо немного узнать о трехфазном источнике питания переменного тока. Направление тока в источнике питания переменного тока периодически меняется, генерируя синусоидальную форму волны, причем каждый цикл показывает величину тока, идущую от нуля до максимума в одном направлении, обратно до нуля, а затем до максимума в противоположном направлении.Трехфазный источник питания переменного тока содержит три различных синусоидальных сигнала переменного тока, так что, когда один из циклов проходит через ноль, два других могут компенсировать уменьшенную величину тока в цепи. Большинство наших бытовых электроприборов могут эффективно работать с частотой 50-60 Гц (циклов в секунду) одной синусоидальной формы волны переменного тока; однако в промышленных целях применяется трехфазный источник переменного тока для удовлетворения требований высокой мощности.
В трехфазном асинхронном двигателе статор состоит из трех наборов обмоток, на которые подается входной трехфазный переменный ток.Обмотки статора расположены по Y-образной схеме, образуя разность фаз в 120 градусов. Эта конструкция обеспечивает вращающееся магнитное поле, и согласно закону Ленца ротор начинает вращаться в своем направлении, чтобы нейтрализовать эффект электромагнитной индукции. Тем не менее, из-за разницы между индуцированным магнитным потоком ротора и магнитным потоком статора, ротор никогда не достигает скорости вращающегося магнитного поля. Гипотетически, если ротор сможет достичь скорости, аналогичной скорости вращающегося магнитного поля, путем приложения некоторой внешней силы, не будет никакого запаздывания между потоками, и электромагнитная индукция немедленно прекратится.В основном это два
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Как следует из названия, трехфазный асинхронный двигатель с короткозамкнутым ротором содержит ротор с короткозамкнутым ротором (описанный выше) и работает от трехфазного источника переменного тока. Вращающееся магнитное поле индуцирует ток через проводящие стержни, который дополнительно генерирует магнитный поток ротора и заставляет ротор вращаться. Цилиндрическая конструкция клетки имеет определенные преимущества, такие как прочная конструкция и низкие затраты на техническое обслуживание; однако наиболее важной особенностью роторов с короткозамкнутым ротором является простота конструкции для создания различных вариантов.Характеристики скорости-момента трехфазного асинхронного двигателя с короткозамкнутым ротором можно легко изменить, отрегулировав перекос и длину токопроводящих стержней внутри ротора. Это позволяет легко заменять двигатели разных производителей, что упрощает замену двигателей. Тем не менее, отсутствие контроля скорости в асинхронных двигателях с короткозамкнутым ротором является недостатком их уникальной конструкции. Короткозамкнутые кольца на концах ротора не дают места для добавления переменного сопротивления, и поэтому трехфазный асинхронный двигатель с короткозамкнутым ротором работает с постоянной скоростью после достижения установившегося состояния.
Трехфазный асинхронный электродвигатель с контактным кольцом
Трехфазный асинхронный двигатель с контактным кольцом, также известный как трехфазный асинхронный двигатель с обмоточным ротором, представляет собой асинхронный двигатель с регулируемой скоростью. Ротор этих двигателей состоит из цилиндрического блока, содержащего многослойные стальные пластины, намотанные катушками из медной проволоки. Обмотки ротора имеют трехфазную конфигурацию, при этом выводы каждой фазы подключены к контактным кольцам. Контактное кольцо — это электромеханическое устройство, которое помогает передавать мощность и электрические сигналы от неподвижного компонента к вращающемуся.Когда источник переменного тока используется для возбуждения обмотки статора, создается магнитный поток. Вращающееся магнитное поле индуцирует ток через проводящие стержни, который создает дополнительный магнитный поток в роторе и заставляет его вращаться. Тем не менее, из-за большего количества витков в обмотках ротора индуцированное напряжение выше, чем индуцированный ток. Когда двигатель включен, внешнее сопротивление, приложенное к обмоткам ротора, заставляет ток ротора ослаблять вращающееся магнитное поле статора.Это означает, что как только двигатель достигает полной скорости, сопротивление можно регулировать для управления скоростью вращения, что дает операторам возможность выбирать пусковой момент и рабочие характеристики. Индуктивное реактивное сопротивление и разность фаз между I и V могут быть уменьшены, что позволяет двигателю обеспечивать высокий пусковой крутящий момент. По сравнению со стандартными двигателями с короткозамкнутым ротором сложность и необходимость обслуживания контактных колец и щеток высоки. Тем не менее, в приложениях с высокими инерционными нагрузками, таких как большие вентиляторы, насосы и мельницы, конструкция с фазным ротором позволяет постепенно ускорять нагрузку за счет управления скоростью и крутящим моментом.
Преимущества трехфазного асинхронного двигателя
- Они имеют простую конструкцию и прочную конструкцию, что делает их долговечными и простыми в управлении.
- Стоимость обслуживания трехфазных асинхронных двигателей значительно ниже по сравнению с однофазными асинхронными двигателями.
- Наиболее важной особенностью, которая делает трехфазные асинхронные двигатели широко применяемыми в промышленности, является то, что они самозапускаются и не требуют какого-либо внешнего механизма для запуска вращения ротора.Вращающееся магнитное поле, создаваемое Y-образной структурой обмоток статора, достаточно эффективно для создания пускового момента, чего нет в однофазных асинхронных двигателях.
- Разделение трехфазного входного переменного тока в трехфазном асинхронном двигателе вызывает распределение нагрузки и делает двигатель более эффективным с точки зрения характеристик скорости-момента.
- Ротор трехфазного асинхронного двигателя с короткозамкнутым ротором не имеет физического электрического соединения, что позволяет избежать потерь тока, которые могут возникнуть во время передачи.
- Трехфазный асинхронный двигатель работает во вращающемся магнитном поле с постоянной величиной, то есть крутящий момент постоянный, а не пульсирующий.
- Устойчивое магнитное поле также снижает вибрацию двигателя.
Недостатки трехфазного асинхронного двигателя
- Трехфазный асинхронный двигатель потребляет больше тока в условиях небольшой нагрузки из-за низкого коэффициента мощности. В результате происходит большая утечка меди и низкий КПД.
- Чтобы получить контроль скорости в трехфазном асинхронном двигателе, требуется больше электрических компонентов, что приводит к сложному электрическому механизму.
- Асинхронный двигатель имеет высокий пусковой ток. Это вызывает снижение напряжения во время запуска.
Приложения
Трехфазные асинхронные двигатели в основном используются в промышленных условиях. Асинхронные двигатели с короткозамкнутым ротором используются как в быту, так и в промышленности, особенно в приложениях, где не требуется регулирование скорости двигателя, таких как погружные насосы, прокатные прессы, шлифовальные машины, конвейеры, компрессоры напольных мельниц и т. Д.Двигатели с фазным ротором, напротив, используются в приложениях с большой нагрузкой, требующих высокого пускового момента, например, в лифтах, кранах, линейных валах, мельничных прессах и т. Д.
Однофазный асинхронный двигатель
Однофазные асинхронные двигатели практически идентичны трехфазным асинхронным двигателям; однако эти двигатели работают от однофазного источника переменного тока. Однофазные асинхронные двигатели широко используются в маломощных устройствах, например, в бытовых приборах. Они меньше по размеру и дешевле в производстве.Поскольку большинство этих двигателей имеют дробную мощность в киловаттах, они также известны как двигатели с дробной мощностью. Статор однофазного асинхронного двигателя представляет собой неподвижную часть с многослойной конструкцией, состоящей из штамповок, аналогичной таковой у трехфазного асинхронного двигателя. Обмотка статора поддерживается пазами на краю этих штамповок. Для активации этой обмотки используется однофазный источник переменного тока. Ротор состоит из пазов, заполненных токопроводящими алюминиевыми или медными стержнями. Индуцированное магнитное поле в роторе будет взаимодействовать с магнитным полем статора, образуя вращающееся поле.Даже с одной обмоткой это поле заставляет двигатель работать в том направлении, в котором он был запущен. Однако, когда двигатели подключены к нагрузке, невозможно обеспечить начало вращения. Чтобы обойти эту трудность, однофазный двигатель временно преобразуется в двухфазный двигатель, чтобы обеспечить вращающийся поток. Помимо основной обмотки статора предусмотрена пусковая обмотка. Пусковая или вспомогательная обмотка сделана очень резистивной, а основная или рабочая обмотка — очень индуктивной.Из-за огромной разницы фаз между этими двумя двигателями создается достаточный крутящий момент для вращения ротора.
Асинхронный двигатель с расщепленной фазой
В однофазном асинхронном двигателе с расщепленной фазой, также известном как двигатель с резистивным пуском, вспомогательная или пусковая обмотки расположены на 90 ° от основных обмоток статора. Вспомогательные обмотки вместе с резистором подключаются к основным обмоткам последовательно и параллельно источнику переменного тока. Вспомогательная обмотка имеет несколько витков небольшого диаметра.Вспомогательные обмотки создают разность фаз между обоими потоками, создаваемыми основной обмоткой и обмоткой ротора. Когда двигатель развивает от 75 до 80% максимальной скорости, центробежный выключатель отключает эту обмотку, что неэффективно в рабочих условиях. В этом случае двигатель работает только от основной обмотки статора. Такой подход дает очень небольшую разность фаз, и, следовательно, пусковой момент в этих двигателях очень низкий. В результате они используются в приложениях, требующих умеренного начального крутящего момента, например, в вентиляторах, воздуходувках или шлифовальных машинах.
Асинхронный двигатель с конденсаторным пуском
Этот двигатель представляет собой более сложный вариант асинхронного двигателя с расщепленной фазой. Индукции с разделением фаз недостаточно для создания высокого крутящего момента, поскольку разность фаз, вызванная вспомогательными обмотками, мала. Этот недостаток устраняется в конденсаторном пусковом двигателе путем последовательного включения конденсатора со вспомогательной обмоткой. Этот двигатель оснащен конденсатором сухого типа, работающим на переменном токе. Тем не менее, этот конденсатор не используется постоянно.В этой схеме также используется центробежный переключатель, который отключает конденсатор и вспомогательную обмотку, когда двигатель работает на 75-80% синхронной скорости. Конденсатор потребляет большую разность фаз между током, протекающим через основные обмотки, и током, протекающим через вспомогательные обмотки. В результате, по сравнению с асинхронным двигателем с расщепленной фазой, пусковой крутящий момент этого двигателя чрезвычайно высок и даже на 300 процентов превышает полную нагрузочную способность асинхронного двигателя с разъемной поверхностью.Этот двигатель используется в приложениях, где требуется высокий пусковой крутящий момент, например, в токарных станках, компрессорах, сверлильных станках и т. Д.
Конденсатор пусковой конденсатор Асинхронный двигатель
Конденсаторный пусковой конденсаторный двигатель имеет два конденсатора в параллельной конфигурации, подключенных последовательно к вспомогательной обмотке. Один из этих двух конденсаторов используется исключительно для инициирования (пусковой конденсатор) и имеет высокое значение емкости, а другой постоянно соединен с двигателем (рабочий конденсатор) и имеет низкое значение емкости.Пусковой конденсатор соединен последовательно с центробежным выключателем, который выключается, когда скорость двигателя достигает 70% от скорости. Рабочий конденсатор улучшает коэффициент мощности двигателя, обеспечивая дополнительный заряд переменного тока. В рабочем режиме к двигателю подключены как рабочая, так и вспомогательная обмотки. Пусковой момент и КПД этого двигателя очень высоки. Следовательно, это можно использовать в приложениях, где требуется высокий пусковой крутящий момент, например, в холодильнике, кондиционере, потолочном вентиляторе, компрессоре и т. Д.
Асинхронный двигатель с экранированными полюсами
Асинхронный двигатель с экранированными полюсами представляет собой однофазный асинхронный двигатель с самозапуском и медным кольцом, затеняющим полюса статора. Это медное кольцо служит вторичной обмоткой двигателя, и когда питание подается на статор, в медных кольцах индуцируется магнитный поток. Поток медного кольца взаимодействует с потоком обмоток статора, создавая вращающееся магнитное поле. Асинхронный двигатель с экранированными полюсами состоит из ротора с короткозамкнутым ротором, который взаимодействует с вращающимся магнитным полем.Это взаимодействие создает крутящий момент в роторе и вращает его. Важно отметить, что асинхронный двигатель с экранированными полюсами может вращаться только в одном направлении. Эти двигатели не обладают хорошим коэффициентом мощности и в основном используются в качестве реле в таких устройствах, как вентиляторы, фены, проекторы, проигрыватели и т. Д.
Преимущества однофазных асинхронных двигателей
Основным преимуществом однофазного асинхронного двигателя является простота сборки и сборки. Асинхронный двигатель работает независимо от состояния окружающей среды.В результате двигатель получается мощный и механически прочный.
Недостатки однофазных асинхронных двигателей
Хотя однофазные двигатели механически просты, известно, что они работают медленно или перегреваются при высокой нагрузке. Более того, поскольку однофазные двигатели не запускаются автоматически, они требуют дополнительных схем для запуска, что, в свою очередь, дает больше места для коротких замыканий и отказов.
Что такое электродвигатель?
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую, обычно в форме вращательного движения.Проще говоря, это устройства, которые используют электроэнергию для выработки движущей силы.
Электродвигатели не только предоставляют простые и эффективные средства для создания высоких уровней выходной мощности привода, но их также легко уменьшить, что позволяет использовать их в других механизмах и оборудовании. В результате они находят широкое применение как в промышленности, так и в повседневной жизни.
Принцип действия
Вы помните, как в школе вас учили правилу левой руки Флеминга? Электродвигатели являются применением этого правила, когда сила, создаваемая электрическим током, протекающим через катушку в присутствии магнитного поля, заставляет вал двигателя вращаться.
На диаграмме ниже правило левой руки Флеминга говорит нам, что восходящая сила генерируется, когда ток течет перпендикулярно магнитному полю от магнита * .
Как достигается вращение в электродвигателе
В случае щеточного электродвигателя постоянного тока * 1 , например, эту силу можно использовать для поддержания непрерывного вращения путем изменения направления тока на каждый пол-оборота катушки (что достигается с помощью щетки и коллектор * 2 )
-
* 1
Двигатель постоянного тока: двигатель с питанием от постоянного тока (DC)
-
* 2
Щетки и коммутатор: используются вместе, они меняют направление тока каждый раз, когда вал двигателя делает пол-оборота.
История электродвигателей
Британский ученый Майкл Фарадей признан особенно влиятельным среди многих ученых 19 века, которые сыграли роль в изобретении и разработке электродвигателей. В 1821 году Фарадей провел успешный эксперимент, в котором вращение проволоки осуществлялось с помощью магнита вместе с магнитным полем, создаваемым электрическим током. В 1831 году он изобрел закон магнитной индукции, заложив основу для значительного прогресса в области электродвигателей и генераторов.
Со временем было разработано множество других типов электродвигателей, а также конструкции, которые можно считать типичными двигателями постоянного тока.
Впоследствии, в 1872 году, практический электродвигатель был не столько изобретен, сколько обнаружен, когда один из генераторов, представленных на Всемирной выставке в Вене, начал вращаться самостоятельно после случайного подключения к другому генератору. Это привело людей к пониманию того, что принцип работы генераторов можно использовать и в двигателях. Последовавший за этим быстрый рост практического использования генераторов был таким, что они стали основой многих отраслей в 20 веке.
Двигатели и генераторы
В то время как электродвигатели преобразуют электрическую энергию во вращение и другие формы механической энергии, генераторы выполняют обратную роль преобразования механической энергии в электрическую.
Несмотря на эти противоположные функции, двигатели и генераторы очень похожи по конструкции и принципу действия. Фактически, простой эксперимент, в котором два модельных двигателя соединены вместе, — это все, что нужно, чтобы продемонстрировать, что электродвигатель также может работать как генератор.
Естественно, учитывая разные способы их использования, эти два типа машин всегда разрабатывались отдельно.
Типы электродвигателей
Электродвигатели бывают разных форм в зависимости от типа используемого тока, конструкции их катушек (обмоток) и того, как они создают магнитное поле. Соответственно, их можно классифицировать по-разному.
Ниже описаны три типа электродвигателей, обычно используемых как в быту, так и в промышленности.
Двигатели постоянного тока
Это двигатели, приводимые в действие источником постоянного тока. Они сгруппированы в щеточные или бесщеточные (BLDC) двигатели в зависимости от того, используют ли они щетку * 1 .
В то время как щеточные двигатели постоянного тока должны быть подключены только к источнику постоянного тока для работы, бесщеточные двигатели постоянного тока требуют датчика для определения ориентации магнитных полюсов ротора * 2 и цепи привода для подачи соответствующего тока.
Двигатели переменного тока
Это двигатели, приводимые в действие источником переменного тока.Они сгруппированы в зависимости от того, является ли этот источник питания однофазным * 1 или трехфазным * 2 .
Однофазные двигатели дополнительно подразделяются на конденсаторные двигатели, которые используют конденсатор * 3 для создания крутящего момента, и двигатели с расщепленными полюсами, которые имеют дополнительную катушку (обмотку), называемую затеняющей катушкой * 4 .
-
* 1
Однофазный: обычный источник питания переменного тока, обычно доступный в домах.
-
* 2
Трехфазный: источник питания переменного тока, который в основном используется в промышленности.
-
* 3
Конденсатор: электронный компонент, накапливающий электрическую энергию.
-
* 4
Затеняющая катушка: Катушка с замкнутым контуром, намотанная вокруг части сердечника статора.
Шаговые двигатели
Это двигатели, которые вращаются на фиксированный шаг (угол) каждый раз, когда вводится импульс * 1 .
Шаговые двигатели можно сгруппировать по конструкции их ротора. Двигатели с постоянным магнитом (PM) * 2 имеют магнит в роторе * 3 , двигатели с переменным магнитным сопротивлением (VR) * 4 имеют железный сердечник, а гибридные двигатели имеют и то, и другое.
-
* 1
Pulse: Короткий всплеск электричества, возникающий при включении и выключении источника питания.
-
* 2
Ротор: вращающаяся часть двигателя. Вал двигателя является частью ротора.
-
* 3
Двигатель с постоянными магнитами: двигатель с постоянным магнитом
-
* 4
ДвигательVR: двигатель с переменным магнитным сопротивлением, в котором сердечники расположены как зубья шестерни, при этом эта компоновка определяет угол шага.
Обзор типов электродвигателей
В таблице ниже перечислены основные характеристики трех различных типов двигателей.
Помимо перечисленных выше, существует множество других типов электродвигателей.
| Тип | Характеристики |
|---|---|
| Линейный двигатель | Двигатель, скользящий в линейном направлении |
| Ультразвуковой мотор | Двигатель, приводимый в движение посредством ультразвуковых колебаний |
| Двигатель без сердечника | Щеточный двигатель постоянного тока с ротором без железного сердечника или бесщеточный двигатель со статором без железного сердечника |
| Универсальный двигатель | Двигатель с фазным ротором и фазным статором, работающий как на переменном, так и на постоянном токе |
| Гистерезис двигателя | Электродвигатель переменного тока, в роторе которого используется материал, обладающий гистерезисом и вращающийся за счет гистерезисного момента |
| Двигатель SR | Шаговый двигатель VR, который также имеет функцию определения положения ротора, что позволяет избежать потери синхронизации |
Применение двигателей
Хотя электродвигатели используются по-разному, ниже перечислены общие области применения бесщеточных двигателей постоянного тока и шаговых двигателей, поставляемых ASPINA.
Применения для бесщеточных двигателей постоянного тока
Благодаря своим характеристикам: небольшие размеры, высокая мощность, низкий уровень шума и вибрации, а также длительный срок службы, бесщеточные двигатели постоянного тока находят широкое применение в таких приложениях, как системы вентиляции (воздухоочистители и другие виды кондиционирования воздуха), бытовые приборы, холодильники. , водонагреватели, торговые автоматы, копировальные аппараты, принтеры, проекторы, оргтехника, приборы, транспортные средства и медицинские приборы.
- Кондиционеры
- Финансовые терминалы (банкоматы), обменные автоматы, автоматы по обмену валюты, автоматы по продаже билетов
- Бытовая техника
- Чистые помещения
- Водонагреватели и горелки
- Оптическая продукция
- Торговые автоматы
- Принтеры
- Витрины для морозильных и холодильных камер
- Копировальные аппараты
- Медицинское оборудование
- Оргтехника
- Лабораторные аналитические системы
Применения для шаговых двигателей
Превосходная точность остановки, высокий крутящий момент на средних и низких скоростях и превосходная отзывчивость шаговых двигателей означают, что они могут использоваться в широком спектре приводных приложений, требующих точного управления.
- Производственное оборудование
- Оптические приводы (приводы Blu-ray, DVD и т. Д.)
- Медицинское оборудование
- Лазерные принтеры
- Приборы лабораторные аналитические
- Цифровые фотоаппараты
- Банкоматы
- Жалюзи кондиционера
- Торговые автоматы
- Аттракционы
- Автоматы по продаже билетов
- Копировальные аппараты
- Роботы
Преодоление проблем с электродвигателями
ASPINA поставляет не только автономные шаговые двигатели, но и системные продукты, которые включают в себя системы привода и управления, а также механическую конструкцию.Они подкреплены всесторонней поддержкой, которая простирается от прототипа до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым для различных отраслей промышленности, приложений и продуктов клиентов, а также для конкретных производственных условий.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних этапах разработки.
Вы боретесь со следующими проблемами?
Выбор двигателя
- У вас еще нет подробных спецификаций или чертежей, но нужна консультация по двигателям?
- У вас нет сотрудников, имеющих опыт работы с двигателями, и вы не можете определить, какой двигатель лучше всего подойдет для вашего нового продукта?
Разработка двигателя и сопутствующих компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и передать на аутсорсинг приводные системы и разработку двигателей?
- Хотите сэкономить время и силы, связанные с изменением конструкции существующих механических компонентов при замене двигателя?
Уникальное требование
- Нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался от него?
- Не можете найти двигатель, который дает вам необходимый контроль, и вот-вот теряете надежду?
Ищете ответы на эти проблемы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.
Ссылки на глоссарий и страницы часто задаваемых вопросов
Двигатель асинхронный, принцип работы
Слово «двигатель» всегда порождает представление о чем-то подвижном, а еще чаще — о вращающемся. Конечно это из-за двигателя. Суть любого двигателя в том, чтобы преобразовать какую-то энергию в движение. Вы знаете, какой двигатель был первым? Считается, что это был парус. Не будет ошибкой сказать, что самый распространенный двигатель — электрический.Среди всего разнообразия электромобилей этого класса наибольшее распространение получил асинхронный двигатель, принцип действия которого основан на использовании двух основных проявлений электрической энергии — электромагнетизма и электрической индукции.
Чтобы понять принцип работы асинхронного электродвигателя, вспомним простейшие опыты из школьного курса физики:
- Если проводник проходит через проводник, вокруг него возникает магнитное поле, пропорциональное току;
- Если взять два проводника с током, то между ними есть силовое поле — они отталкиваются или притягиваются, как любые кусочки магнитов;
- Если один проводник с током движется относительно другого, который не подключен к источнику, но его цепь замкнута, то в нем появляется ток.
Физическая, а точнее умозрительная, модель процесса включает понятие магнитных силовых линий, которыми мы обозначаем наличие магнитных свойств. Вот они и растягивают свои «щупальца» во все стороны, и если на пути оказывается ферромагнитный материал, т.е. такой, что магнитные линии сосредоточены, то на него действует движущая сила. А если сам этот материал является магнитом, то еще сильнее проявляется силовое взаимодействие магнитных полей.Магнитное поле проводника можно увеличить, намотав большое количество витков на стержень из ферромагнетика; в простейшем случае это обычный металлический цилиндр из черного металла. Сделать жезл наподобие подковы довольно легко, а на него намотать моток. Концы «подковы» стали полюсами магнита, который при включении тока через катушку создает мощное, максимальное в центре полюсов магнитное поле. Обычно мы визуализируем это на чертежах с помощью линий.
Если мы поместим металлический стержень в зазор между полюсами, а затем начнем вращать нашу магнитную «подкову», то заметим, что стержень тоже будет вращаться. Почему наше устройство называется асинхронным двигателем? Принцип работы этой электрической машины, как уже было сказано, основан на явлении электромагнитной индукции, т.е. пересечении магнитными линиями индуктора корпуса нашего стержня. Причем «пересечение» возможно только тогда, когда скорость вращения магнитного поля индуктора — «подковы» — больше скорости вращения стержня.Этот параметр двигателя — асинхронная скорость вращения — называется «скольжением» и может достигать до 7% от номинальной скорости магнитного поля статора.
Максимум магнитного поля в «подковообразном» промежутке меняет свое пространственное положение при вращении. В соответствии с законом электромагнитной индукции в стержне возникает электрический ток вместе со своим «спутником жизни» — магнитным полем. Магнитные поля прилипают, взаимодействуют и … вращают ротор. Настоящий асинхронный двигатель полностью повторяет принцип работы, описанный здесь.Все, круг замкнут — у нас есть два объекта без механической связи, но вращение одного из них, получающего электрическую энергию, приводит к вращению другого. Роль невидимой «веревки» выполняют магнитные поля подковообразного магнита и стержня.
Для создания двигателя почти ничего не остается — нужно не вращать подкову, а заставить вращаться магнитное поле самостоятельно. Другими словами, принцип действия демонстрирует принцип действия тем, что в нем точка максимума магнитного поля движется в статоре по кругу, как если бы это наш вращающийся электромагнит.Осталось поработать по малому — «закрутить» магнитное поле.
Задача о вращающемся магнитном поле решается следующим образом:
- По кругу расположены три пары полюсов — катушки — под углом 120 градусов;
- Синусоидальное напряжение подается на каждую катушку от отдельного источника. Считается, что полный временной цикл синусоиды (периода) составляет 360 градусов. Положительный пик напряжения возникает через 90 градусов после нулевого значения — все, как учат в школе;
- Изюминка в том, что пики напряжения возникают со сдвигом по времени на треть периода (электрики говорят «три фазы со сдвигом на 120 градусов») — это принцип работы асинхронного двигателя.Максимум напряженности магнитного поля перемещается от первой пары полюсов ко второй, а затем и к третьей. Затем процесс повторяется, что эквивалентно смещению, точнее «вращению» магнитного поля.
Итак, просто и без шума электрическая энергия статора превращается в механическое движение ротора. На создание этого чудо-двигателя человечеству потребовалось несколько десятилетий, а у нас было 15 минут, чтобы с уверенностью сказать: асинхронный двигатель? Нет ничего проще.
Как работают электродвигатели переменного тока?
Двигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC). Двигатели переменного тока широко используются в промышленности, в первую очередь из-за их высокого КПД и их способности создавать постоянный крутящий момент до номинальной скорости.
Типы двигателей переменного тока
Два наиболее широко используемых типа двигателей переменного тока — это асинхронные двигатели и синхронные двигатели.
Трехфазный асинхронный двигатель переменного тока повышенной эффективности IronHorse®
Как работают электродвигатели переменного тока
Двумя основными частями двигателя переменного тока являются статор (неподвижный внешний барабан) и ротор; вращающаяся внутренняя часть двигателя, которая прикреплена к валу двигателя (и приводит в движение).И статор, и ротор создают вращающиеся магнитные поля. В обмотках статора это вращающееся поле обеспечивается синусоидальной природой переменного тока. В роторе магнитное поле создается постоянными магнитами, реактивным сопротивлением или дополнительными электрическими обмотками.
Синхронные двигатели работают синхронно с частотой питающего тока, поскольку их роторы имеют либо постоянные магниты, либо электромагниты, генерирующие вращающееся электромагнитное поле.
В асинхронном двигателе магнитное поле в обмотках ротора «индуцируется» магнитным полем статора. Чтобы эта индукция создавала крутящий момент, скорость поля ротора должна отставать от поля магнитного поля статора. Этот дифференциал скоростей известен как «скольжение» и является причиной того, что асинхронные двигатели будут иметь номинальное число оборотов, указанное на паспортной табличке, примерно на 5% меньше, чем их синхронная скорость. Например, модель Ironhorse MTRP-001-3DB18 (1 л.с., трехфазный, четырехполюсный, асинхронный двигатель переменного тока) имеет номинальную синхронную скорость 1800 об / мин (при условии мощности 60 Гц), но номинальная частота вращения на паспортной табличке составляет 1760.Вал этого двигателя будет вращаться со скоростью 1760 об / мин при питании «поперек линии» с трехфазным питанием 60 Гц по стандарту США.
Отличия от двигателей постоянного тока
Промышленные двигатели постоянного тока исторически были щеточными. Двигатели постоянного тока со щетками и коммутаторами имеют ряд недостатков по сравнению с двигателями переменного тока: дополнительное обслуживание (замена щеток), ограниченные диапазоны скоростей и общий ожидаемый срок службы меньше. Асинхронные двигатели переменного тока не имеют щеток и имеют гораздо более длительный срок службы.
Скорость двигателяпостоянного тока регулируется путем изменения тока якоря, в то время как управление скоростью двигателя переменного тока достигается путем изменения частоты переменного тока, часто с помощью частотно-регулируемого привода (ЧРП).
Бесщеточные двигатели постоянного токастали доступны в течение последних нескольких десятилетий, прежде всего в результате появления полупроводниковых схем управления, необходимых для их работы, а также наличия высококачественных постоянных магнитов. Бесщеточные двигатели постоянного тока не требуют щеток или физического коммутатора и, следовательно, имеют увеличенный срок службы.Они также преодолевают ограничения скорости щеточных версий.
Управление двигателем переменного тока
Когда требуется простое включение / выключение, часто используются контакторы или ручные пускатели двигателей. Контакторы (большие трехфазные реле) позволяют ПЛК или другому контроллеру переключать питание на двигатель переменного тока. Реверсивные пускатели двигателей представляют собой специализированные версии с двумя контакторами, подключенными таким образом, что они также позволяют изменять направление вращения вала двигателя. Ручные пускатели двигателей включают ручку с ручным управлением, которая позволяет оператору переключать мощность.Все эти типы известны как «поперечное» управление — двигатель подключается непосредственно к «линии» входящего питания (через контактор или пускатель двигателя).
Устройства плавного пуска
Устройства плавного пуска— это более сложные средства управления двигателем, которые позволяют использовать линейные изменения ускорения и замедления для более плавной остановки и запуска двигателей, чем это возможно при поперечном управлении. В устройствах плавного пуска обычно используются кремниевые управляющие выпрямители (управление тиристором) для постепенного увеличения или уменьшения угла зажигания для медленного увеличения или уменьшения количества используемой энергии и обеспечения более плавного пуска или замедления по сравнению с пускателем двигателя, подключенным к сети. .Устройства плавного пуска снижают износ двигателя и любых подключенных механических устройств, а также значительно снижают пусковой ток, необходимый для запуска двигателя. Для больших двигателей это может иметь серьезные последствия для снижения затрат на коммунальные услуги.
Регулятор скорости (ЧРП)
Трехфазные асинхронные двигатели переменного тока иногда получают питание от частотно-регулируемых приводов (ЧРП), которые, как следует из названия, изменяют частоту питания двигателя, чтобы изменять скорость двигателя.Эти устройства принимают стандартную входную мощность 60 Гц (одно- или трехфазную), преобразуют ее в постоянный ток, а затем используют широтно-импульсную модуляцию (ШИМ) для создания моделируемой мощности переменного тока любой частоты, необходимой для вращения двигателя с заданной скоростью. Подробнее о VFD здесь.
Однофазный режим
Также доступны однофазные асинхронные двигатели переменного тока. Эти двигатели требуют специальной схемы для запуска (пусковые конденсаторы и центробежные переключатели), но работают так же, как их трехфазные аналоги, когда они вращаются.Однофазные асинхронные двигатели переменного тока несовместимы с частотно-регулируемыми приводами и могут привести к более высоким расходам на коммунальные услуги из-за своей несбалансированной нагрузки в электросети.
Как указать двигатели переменного тока
Если вы указываете двигатель для нового приложения, начните с определения необходимого напряжения, скорости и мощности, а также типа приложения, как описано в этой статье.
Если вы заменяете двигатель подходящего размера в существующем приложении, вы можете найти всю необходимую информацию на паспортной табличке существующего двигателя.См. Этот информационный документ «Важные соображения по замене и определению размеров электродвигателей переменного тока», чтобы узнать, как определить, нужно ли перематывать или заменять электродвигатель, и как найти электродвигатель подходящего размера для вашего приложения.
В дополнение к стандартным спецификациям для скорости двигателя, мощности и рабочего напряжения разработчики должны также учитывать конструкцию NEMA (соотношение скорость-крутящий момент-проскальзывание), тип корпуса и условия охлаждения (если таковые имеются), размер корпуса и варианты монтажа. Вот несколько рекомендаций:
Классификация проектов NEMA
Существует четыре различных проектных классификации NEMA по скорости, крутящему моменту и скольжению, которые помогают определить пригодность для различных приложений:
- NEMA design A; подходит для широкого спектра применений, таких как вентиляторы и насосы.Двигатели имеют максимальное скольжение 5%, пусковой ток от высокого до среднего, нормальный момент заторможенного ротора и нормальный момент пробоя.
- NEMA дизайн B; предназначен для широкого спектра применений с нормальным пусковым моментом (вентиляторы, нагнетатели и насосы). Двигатели имеют максимальное скольжение 5%, низкий пусковой ток, высокий крутящий момент заблокированного ротора и нормальный момент пробоя.
- NEMA дизайн C; предназначен для оборудования с высокоинерционным пуском — например, поршневых насосов прямого вытеснения. Двигатели имеют максимальное скольжение 5%, низкий пусковой ток, высокий крутящий момент заблокированного ротора и нормальный момент пробоя.
- NEMA дизайн D; предназначен для оборудования с очень большим моментом инерции пусков (краны, подъемники и т. д.). Двигатели имеют максимальное скольжение 5-13%, низкий пусковой ток и очень высокий крутящий момент заблокированного ротора.
Тип корпуса и охлаждение
Распространенные типы корпусов включают защиту от капель (DP), полностью закрытые с вентиляторным охлаждением (TEFC) и полностью закрытые без вентиляции (TENV).
- Каплестойкие двигатели — это двигатели с открытой рамой, предназначенные для внутреннего применения в чистой окружающей среде.Вентиляционные отверстия предназначены для предотвращения попадания падающих твердых частиц и жидкостей. Двигатели
- TEFC имеют вентилятор, прикрепленный к задней части вала двигателя, чтобы помочь охладить двигатель. Несмотря на то, что в корпусе двигателя нет вентиляционных отверстий, корпус не герметичен для воздуха или жидкости. Хотя двигатель TEFC может работать при более высокой температуре окружающей среды, будьте осторожны на низких скоростях (под управлением VFD), поскольку охлаждающий вентилятор прикреплен к валу двигателя, и ему может потребоваться определенная минимальная скорость для эффективного охлаждения двигателя. Двигатели
- TENV также не имеют вентиляции, но корпус не герметичен для воздуха или жидкости.
Дополнительные классификации включают двигатели, рассчитанные на промывку (TEWD), взрывозащищенные двигатели (XPRF) и двигатели, предназначенные для использования во взрывоопасных зонах (HAZ).
Размер рамы и установка
Большинство двигателей переменного тока сегодня построено для определенных размеров NEMA. В небольших диапазонах мощности многие двигатели доступны в размере корпуса «NEMA 56C». «56» относится к размерам корпуса двигателя. «C» обозначает двигатель, устанавливаемый на поверхность «C» (фланец).Это самый популярный тип двигателя с торцевым креплением, который имеет особую схему расположения болтов на конце вала, позволяющую производить монтаж. Критическими размерами двигателей с C-образной гранью являются окружность болта, диаметр приводного устройства и размер вала. Двигатели с фланцем C всегда имеют резьбовые монтажные отверстия на лицевой стороне двигателя. Многие двигатели предлагаются как с вариантами монтажа C-Face, так и с жесткой или съемной монтажной базой. По мере увеличения мощности используется ряд различных обозначений Т-образной рамы для обозначения стандартных размеров NEMA.
Для VFD или нет для VFD
Если вы планируете использовать асинхронный двигатель переменного тока с частотно-регулируемым приводом (VFD) — существует ряд дополнительных соображений, ознакомьтесь с нашей статьей «В VFD или нет в VFD».
Для получения дополнительной информации о спецификациях и размерах двигателей всех типов щелкните здесь.
Типы двигателей переменного тока — Классификация и применение двигателей переменного тока
Введение
Все мы знаем, что без электричества мы не можем выполнять свою работу.Если мы посмотрим на мир, в котором живем, то основное развитие технологий и цивилизации произошло только после появления электричества и электрических устройств. Можем ли мы представить себе жизнь без кондиционеров / потолочных вентиляторов, светильников, компьютеров, устройств связи и многого другого.
Совершенно очевидно, что электричество и электрическое оборудование играют жизненно важную роль в каждом сантиметре нашей жизни. Одним из таких устройств, совершивших гигантский скачок для человечества как в бытовом, так и в промышленном секторах, является «Мотор».Двигатели переменного тока используются гораздо чаще, чем двигатели постоянного тока, по нескольким практическим причинам, о которых мы узнаем позже.
A.C. Двигатели играют очень важную роль в повседневной жизни, начиная от перекачки воды в верхний резервуар и заканчивая маневренной рукой современного робота. Основным фактором, который привел к принятию и широкому использованию в различных областях, является его гибкость и огромное разнообразие, которое может удовлетворить практически любой спрос. Чтобы знать, какие существуют различные типы двигателей переменного тока, чтобы они идеально соответствовали спросу, очень важно знать о различных классификациях двигателей A.C.Motors.
Типы электродвигателей переменного тока
- Классификация основана на принципе действия :
(a) Синхронные двигатели.
1. Обычный
2. Super
(б) Асинхронные двигатели.
1. Асинхронные двигатели:
(a) Беличья клетка
(b) Контактное кольцо (внешнее сопротивление).
- Коллекторные двигатели:
(a) Серия
(b) Компенсированная
(c) Шунтирующая
(d) Отталкивание
(e) Индукция отталкивания-старта
(f) индукция
- Классификация по типу тока:
1.Однофазный
2. Трехфазный
- Классификация на основе Скорость работы:
1. Постоянная скорость.
2. Переменная скорость.
3. Регулируемая скорость.
- Классификация на основе Структурные особенности:
1. Открытая
2. Закрытая
3. Полузакрытая
4. Вентилируемая
5. Трубная вентилируемая
6. Заклепочная рама- глаз и т. д..
Обзор асинхронных двигателей
1. Синхронные двигатели и их использование : Эти двигатели имеют роторную нагрузку с той же скоростью, что и скорость вращения статора по току. Другими словами, мы можем сказать, что эти двигатели не имеют скольжения по току статора. Иногда они используются не для управления нагрузкой, а вместо этого действуют как «синхронный конденсатор», чтобы улучшить коэффициент мощности локальной сети, к которой он подключен.Такие двигатели используются даже в высокоточных устройствах позиционирования, таких как современные роботы. Они также могут действовать как шаговые двигатели.
2. Асинхронные двигатели и их применение: Наиболее распространенная форма двигателя, которая используется в повседневной жизни от перекачивания воды в верхний резервуар до питательных насосов котла электростанции, такие двигатели правят. Эти двигатели очень гибкие в использовании и почти во всем соответствуют требованиям нагрузки. Наиболее широко используемые асинхронные двигатели
очень важны для многих отраслей промышленности из-за их несущей способности и гибкости.Эти двигатели, в отличие от синхронных двигателей, скользят по сравнению с полем тока статора. Они обычно используются для различных типов насосов, компрессоров и действуют как первичные двигатели для многих механизмов.
3. Одно- и трехфазные двигатели и их применение: Двигатели переменного тока могут найти свое применение в 2 формах в зависимости от источника питания. Однофазные двигатели обычно используются в бытовых приборах с низким энергопотреблением, таких как потолочные вентиляторы, миксеры-измельчители, переносные электроинструменты и т. Д.Трехфазные двигатели обычно используются для высоких требований к мощности, таких как силовые приводы для компрессоров, гидравлических насосов, компрессоров кондиционирования воздуха, ирригационных насосов и многого другого.
4. Двигатели с постоянной, переменной и регулируемой скоростью: Как уже было сказано, двигатели переменного тока очень гибкие во многих отношениях, включая управление скоростью. Есть двигатели, которые должны работать с постоянной скоростью для воздушных компрессоров. Некоторые насосы охлаждающей воды с приводом от a.c. двигатели могут работать на двух или трех скоростях, просто переключая количество используемых полюсов. При изменении количества полюсов изменяется и скорость. Они лучше всего подходят для насосов охлаждения забортной воды в судовых машинных отделениях и на многих электростанциях. Скорость двигателей также может непрерывно изменяться с помощью некоторых электронных устройств, поэтому это может быть подходящим для определенных применений, таких как грузовой насос судна, скорость разгрузки которого должна быть снижена в соответствии с требованиями терминалов.
5. Двигатели различной конструкции : Эти типы двигателей имеют различное расположение наружной клетки в зависимости от использования или каких-либо особых промышленных требований. Для двигателей, используемых на газовых и нефтяных терминалах, кожух должен быть искробезопасным, таким образом, он может иметь либо закрытый кожух, либо систему с вентилируемой трубой, чтобы искры, возникающие внутри двигателя, не вызывали возгорания за его пределами. Кроме того, многие двигатели полностью закрыты, поскольку они могут быть открыты для погодных условий, как те, что используются на гидроэлектростанциях.
Кредиты изображений:
www.alibaba.com
www.tpub.com
www.praireturbines.com
www.new-motortrends.com
кредитов содержания:
Электрические машины A.K. И Б.Л. Тераджа.
Принцип работы двигателя переменного тока с основами и конструкцией
Принцип работы двигателя переменного тока основан на простых принципах магнетизма. Но прежде чем подробно обсудить принцип работы двигателя переменного тока, давайте разберемся с основами.AC — это сокращение от Alternating Current . В то время как постоянный или постоянный ток остается постоянным во времени, переменный ток периодически меняет свое направление.
Разница между переменным током и постоянным током:
Профиль постоянного напряжения показан на рисунке ниже. Посмотрите, как величина напряжения остается постоянной с течением времени. Генератор постоянного тока и двигатель постоянного тока требуют такого напряжения для работы.
Форма сигнала постоянного напряжения
Ниже приводится профиль напряжения переменного тока.
Один полный цикл питания переменного тока
- При подаче сигнала переменного тока для двигателя переменного тока величина напряжения начинается с нуля, увеличивается до максимального значения, а затем начинает уменьшаться, пока снова не достигнет нуля. Он составляет полупериод и известен как положительный полупериод .
- После завершения полупериода величина напряжения снова увеличивается, но уже в обратном направлении.Он следует той же схеме, что и положительный полупериод, и известен как отрицательный полупериод .
Отрицательный полупериод переменного тока
- Комбинация положительных и отрицательных циклов составляет один полный цикл.
- Время, необходимое для завершения этого цикла, известно как период времени . Обратная величина периода времени — , частота . Итак, для электрической системы с частотой 50 Гц этот один цикл завершается за 0.02 сек. Электродвигатели переменного тока
- работают по принципу электромагнитной индукции . Он преобразует электрическую энергию (в форме переменного тока) в механическую энергию (вращение вала).
- Принцип работы двигателя переменного тока подробно объясняется после базовой конструкции двигателя переменного тока.
Базовая конструкция двигателя переменного тока
Конструкция двигателя переменного тока** Источник изображения
Итак, разобравшись с основами, давайте узнаем, как двигатель переменного тока выглядит изнутри.
- Если упростить конструкцию двигателя переменного тока, он состоит из двух основных частей. Стационарная конструкция (он же статор) и вращающаяся часть (он же ротор).
- Неподвижная часть состоит из катушек, покрывающих всю ее внутреннюю периферию. При прохождении электрического тока через эти обмотки электромагниты возбуждаются, создавая полюса чередующейся полярности. В двигателях переменного тока
- в качестве ротора используется либо постоянный магнит , либо сердечник из тонкой многослойной стали .В последнем в качестве проводника используются токопроводящие шины вместо катушек с проволокой.
- Вал удерживает вращающуюся часть двигателя. Подшипники между ними обеспечивают свободное движение ротора.
- Наружная рама охватывает как неподвижную, так и вращающуюся часть. Он защищает двигатель от воды или любых других факторов окружающей среды.
** Изображение предоставлено
Подробное описание принципа работы двигателя переменного тока
Чтобы понять, как работает двигатель переменного тока, рассмотрим ротор с постоянными магнитами.Ротор свободно перемещается между двумя полюсами электромагнитного статора (полюс A и B) с небольшим воздушным зазором между ними. Электромагниты подключаются напрямую к источнику переменного тока.
При подаче питания переменного тока на электромагниты подается напряжение и формируются магнитные полюса.
Дело 1:
Во время положительного полупериода подачи переменного тока пусть полюс A достигает полярности северного полюса, а полюс B достигает полярности южного полюса.Теперь по закону магнетизма противоположные полюса будут притягиваться друг к другу. Итак, полюс А притягивает южный полюс ротора. И ротор выравнивается в положении, как показано на рисунке.
Ориентация ротора во время положительного полупериода
Дело 2:
Во время отрицательного полупериода полярность источника переменного тока меняется на противоположную, и, следовательно, полярность полюсов также меняется на противоположную. Итак, теперь полюс A достигает полярности южного полюса, а полюс B — полярности северного полюса.
В этой ситуации одинаковые полюса обращены друг к другу.Таким образом, отталкивающая магнитная сила будет пытаться отклонить ротор из этого положения. Когда ротор отклоняется, в картину вступает сила притяжения. Таким образом, теперь полюс А притягивает северный полюс ротора. Ротор выравнивается в новом положении, как показано на рисунке.
Вращающееся магнитное поле в двигателе переменного тока
Ротор повернулся на угол 180 градусов. Ротор снова поворачивается на 180 градусов в предстоящем положительном полупериоде и так далее.Этот оборот ротора продолжается до тех пор, пока на обмотку статора подается питание.
Вращающееся магнитное поле статора с питанием переменного токаЕсли мы наблюдаем, магнитное поле статора постоянно изменяется. В каждом цикле подачи переменного тока магнитное поле кажется вращающимся внутри периферии статора. Технически это называется вращающимся магнитным полем.
Что такое RPM (оборотов в минуту)?
Оборот ротора на 180 градусов за один цикл переменного токаДля любой вращающейся машины число оборотов в минуту означает скорость вращения ротора.Это количество оборотов ротора за одну минуту. На приведенном выше рисунке показано, что ротор вращается на 180 градусов за один цикл переменного тока. Таким образом, для системы с частотой 50 Гц ротор совершает один оборот за 0,02 секунды. Верный? Итак, за одну секунду этот ротор сделает 50 оборотов. Следовательно, за одну минуту ротор успешно совершит 3000 оборотов внутри периферии статора. Очень быстро, правда? Итак, в нашем обсуждаемом примере скорость ротора составляет 3000 об / мин.
Заключение
Вышеупомянутая теория была просто примером, объясняющим, как работает двигатель переменного тока.В электрических системах двигатели переменного тока обычно имеют более двух электромагнитных полюсов для лучшего распределения магнитного потока. Не все двигатели переменного тока используют постоянный магнит. В зависимости от области применения требуются разные типы роторов. Но основной принцип работы двигателя переменного тока всегда остается неизменным. то есть заставляя ротор вращаться в соответствии с вращающимся магнитным полем статора.
Теория двигателей переменного тока | Sciencing
Обновлено 8 декабря 2018 г.
Дж. Дайан Дотсон
Никола Тесла изобрел двигатели переменного тока, или двигатели переменного тока, в конце 19 века.Двигатели переменного тока отличаются от двигателей постоянного или постоянного тока тем, что в них используется переменный ток, который меняет направление. Двигатели переменного тока преобразуют электрическую энергию в механическую. Двигатели переменного тока по-прежнему широко используются в современной жизни, и вы можете найти их в бытовой технике и гаджетах у себя дома.
TL; DR (слишком долго; не читал)
Электродвигатели переменного тока или электродвигатели переменного тока были изобретены Николой Тесла в 19 веке. Теория электродвигателя переменного тока предполагает использование электромагнитов с токами для создания силы и, следовательно, движения.
Каков принцип работы двигателя?
Простейший принцип работы двигателя заключается в использовании электромагнитов с токами для создания силы для перемещения чего-либо, другими словами, для преобразования электрической энергии в механическую энергию вращения. В двигателях установлены электромагниты, расположенные во вложенных кольцах, причем полярность магнитов в кольцах чередуется с севера на юг. Магниты ротора движутся, а магниты статора — нет. Полярность этих электромагнитов с севера на юг должна постоянно меняться.
Как работает двигатель переменного тока?
До изобретений Теслы двигатели постоянного тока были основным типом двигателей. Двигатель переменного тока работает, подавая переменный ток на обмотки статора, которые создают вращающееся магнитное поле. Поскольку магнитное поле вращается таким образом, двигатель переменного тока не нуждается в силе или механической помощи для воздействия на ротор. Ротор будет вращаться за счет магнитного поля и создавать крутящий момент на приводном валу двигателя. Скорость вращения зависит от количества магнитных полюсов в статоре.Эта скорость называется синхронной скоростью. Однако асинхронные двигатели переменного тока работают с задержкой или скольжением, чтобы обеспечить прохождение тока ротора.
Различные двигатели переменного тока будут иметь разное количество полюсов и, следовательно, разную скорость по сравнению друг с другом. Однако скорость двигателя переменного тока не является переменной, а скорее постоянной. В этом отличие от многих двигателей постоянного тока. Двигатели переменного тока не требуют щеток (силовых контактов) или коммутаторов, которые необходимы двигателям постоянного тока.
Изобретения Теслы кардинально изменили ландшафт двигателей, создав более эффективные и надежные устройства.Эти двигатели переменного тока произвели революцию в отрасли и проложили путь для использования во многих устройствах, используемых в 21 веке, таких как кофемолки, вентиляторы для душа, кондиционеры и холодильники.
Сколько типов двигателей существует?
Существует несколько типов двигателей переменного тока, работающих по одному и тому же основному принципу. Многие из этих двигателей представляют собой разновидности асинхронных двигателей переменного тока, хотя более современные двигатели переменного тока с постоянными магнитами, или PMAC, работают немного иначе.
Самым распространенным двигателем переменного тока является универсальный трехфазный асинхронный двигатель.Этот многофазный двигатель работает с задержкой, а не с синхронной скоростью. Эта разница в скорости называется скольжением двигателя. Индуцированные токи, протекающие в роторе, вызывают это скольжение, что приводит к возникновению большого тока при его запуске. Из-за скольжения эти двигатели считаются асинхронными. Трехфазные асинхронные двигатели обладают высокой мощностью и эффективностью с высоким пусковым моментом. Таким двигателям часто требуется механическое пусковое усилие для приведения ротора в движение. Трехфазные асинхронные двигатели — это мощные двигатели, обычно используемые в промышленных устройствах.
Двигатели с короткозамкнутым ротором — это двигатель переменного тока, в котором алюминиевые или медные токопроводящие шины на роторе расположены параллельно валу. Размер и форма токопроводящих стержней влияет на крутящий момент и скорость. Название происходит от сходства устройства с клеткой.
Асинхронный двигатель с фазным ротором — это двигатель переменного тока, который состоит из ротора с обмотками, а не стержнями. Асинхронным двигателям с фазным ротором требуется высокий пусковой момент. Сопротивление вне ротора влияет на скорость крутящего момента.
Однофазный асинхронный двигатель представляет собой двигатель переменного тока, в котором пусковая обмотка добавлена под прямым углом к обмотке главного статора. Универсальные двигатели — это однофазные двигатели, которые могут работать как от переменного, так и от постоянного тока. Пылесос в вашем доме, скорее всего, оснащен универсальным двигателем.
Конденсаторные двигатели — это тип двигателей переменного тока, который влечет за собой добавление емкости для создания фазового сдвига между обмотками. Они удобны для машин, требующих высокого пускового момента, таких как компрессоры.
Конденсаторные двигатели — это однофазные двигатели переменного тока, которые уравновешивают хороший пусковой момент и ход. В этих двигателях используются конденсаторы, подключенные к вспомогательным пусковым обмоткам. В некоторых печных вентиляторах вы найдете конденсаторные двигатели. В двигателях с конденсаторным пуском используется конденсатор с пусковой обмоткой, который может создавать наибольший пусковой крутящий момент. Оба этих типа двигателей требуют двух конденсаторов в дополнение к переключателю, поэтому их части поднимают цену на такие двигатели. Если выключатель убрать, полученный двигатель с постоянным разделенным конденсатором будет работать с меньшими затратами, но также будет использовать более низкий пусковой момент.Эти типы двигателей переменного тока, хотя и являются более дорогими в эксплуатации, хорошо подходят для нужд с высоким крутящим моментом, таких как воздушные компрессоры и вакуумные насосы.
Электродвигатели с расщепленной фазой — это электродвигатели переменного тока, в которых используется пусковая обмотка небольшого калибра и различные соотношения сопротивления и реактивного сопротивления. Это дает разность фаз через узкие проводники. Двигатели с разделенной фазой обеспечивают более низкий пусковой момент, чем другие конденсаторные двигатели, и высокий пусковой ток. Поэтому электродвигатели с расщепленной фазой обычно используются в небольших вентиляторах, небольших шлифовальных машинах или электроинструментах.Мощность электродвигателей с расщепленной фазой может достигать 1/3 л.с.
Двигатели с расщепленными полюсами — это недорогие однофазные асинхронные двигатели переменного тока с одной обмоткой. Двигатели с экранированными полюсами используют магнитный поток между незатененными и затемненными частями затененной катушки из меди. Их лучше всего использовать в качестве небольших одноразовых двигателей, не требующих длительного времени работы или большого крутящего момента.
Синхронные двигатели названы так потому, что создаваемые ими магнитные полюса вращают ротор с синхронной скоростью.Количество пар полюсов определяет скорость синхронного двигателя. Подтипы синхронных двигателей включают трехфазные и одиночные синхронные двигатели.
Гистерезисные двигатели представляют собой стальные цилиндры без обмоток и зубьев. Эти двигатели обладают постоянным крутящим моментом и работают плавно, поэтому их часто используют в часах.
В большинстве двигателей переменного тока используются электромагниты, потому что они не ослабевают, в отличие от постоянных магнитов. Однако новые технологии сделали двигатели переменного тока с постоянными магнитами жизнеспособными и даже предпочтительными в определенных обстоятельствах.Двигатели переменного тока с постоянными магнитами или PMAC используются в приложениях, требующих точного крутящего момента и скорости. Это надежные, популярные сегодня моторы. Магниты установлены на роторе либо на его поверхности, либо в его пластинах. Магниты, используемые в PMAC, сделаны из редкоземельных элементов. Они производят больше магнитного потока, чем индукционные магниты. PMAC — это синхронные машины, которые работают с высоким КПД и функционируют независимо от того, является ли потребность в крутящем моменте переменной или постоянной. PMAC работают при более низких температурах, чем другие двигатели переменного тока.Это помогает снизить износ деталей двигателя. Благодаря своей высокой эффективности PMAC потребляют меньше энергии. Более высокие первоначальные затраты в конечном итоге компенсируются длительной работой этого эффективного двигателя.
Может ли любой двигатель переменного тока работать с регулируемой скоростью?
Одно из преимуществ двигателей постоянного тока заключается в том, что их скорость может изменяться. Двигатели переменного тока, однако, не склонны работать с переменной скоростью. Они работают с постоянной скоростью независимо от нагрузки. Это полезно для поддержания точной скорости.Однако для некоторых приложений требуется переменная скорость. Попытки изменить скорость двигателей переменного тока могут привести к их повреждению или перегреву. Однако есть способы обойти эти проблемы и создать двигатель переменного тока с регулируемой скоростью. Существуют механические решения для изменения скорости двигателей переменного тока. В некоторых устройствах это можно сделать с помощью шкивов, например токарного станка. Другое механическое решение — использовать промежуточный вал.
Многие современные машины по-прежнему работают на основе оригинальных асинхронных двигателей переменного тока Николы Теслы.Эти двигатели выдержали испытание временем благодаря своей адаптивности и долговечности. Инженеры стремятся сделать двигатели более эффективными, с меньшим износом и тепловыделением, с меньшими затратами и меньшим воздействием на окружающую среду.
