Как устроен двигатель постоянного тока. Каков принцип его работы. Какие особенности характерны для двигателей постоянного тока. В чем преимущества бесконтактных двигателей постоянного тока.
Устройство двигателя постоянного тока
Двигатель постоянного тока состоит из следующих основных частей:
- Статор — неподвижная часть двигателя, создающая основное магнитное поле
- Ротор (якорь) — вращающаяся часть двигателя
- Коллектор — устройство для преобразования постоянного тока в переменный
- Щетки — обеспечивают контакт между коллектором и внешней цепью
- Воздушный зазор между статором и ротором
Статор содержит главные полюса с сердечниками и обмотками возбуждения. Ротор состоит из сердечника из электротехнической стали и обмотки. Коллектор выполнен в виде медных пластин, изолированных друг от друга.
Принцип работы двигателя постоянного тока
Принцип действия двигателя постоянного тока основан на взаимодействии магнитного поля статора и тока в обмотке ротора. Основные этапы работы:

- При подаче напряжения по обмотке статора протекает ток, создающий магнитное поле
- В обмотке вращающегося ротора индуцируется ЭДС
- Взаимодействие тока ротора с магнитным полем статора создает вращающий момент
- Коллектор обеспечивает изменение направления тока в роторе при его вращении
- В результате ротор непрерывно вращается, преобразуя электрическую энергию в механическую
Направление вращения ротора можно изменить, поменяв полярность питающего напряжения или направление тока в обмотке возбуждения.
Особенности двигателей постоянного тока
Двигатели постоянного тока обладают рядом важных особенностей:
- Широкий диапазон регулирования скорости вращения
- Высокий КПД во всем диапазоне регулирования
- Большой пусковой момент
- Линейные механические характеристики
- Простота управления
Эти особенности обуславливают применение двигателей постоянного тока в электроприводах с повышенными требованиями к диапазону регулирования скорости и точности позиционирования.
Преимущества бесконтактных двигателей постоянного тока
Бесконтактные двигатели постоянного тока имеют ряд преимуществ по сравнению с коллекторными:

- Повышенная надежность за счет отсутствия щеточно-коллекторного узла
- Отсутствие искрения и радиопомех
- Возможность работы во взрывоопасных средах
- Сниженный уровень шума
- Меньшие эксплуатационные расходы
В бесконтактных двигателях функцию коммутации выполняют полупроводниковые ключи, управляемые датчиком положения ротора. Это позволяет сохранить преимущества двигателей постоянного тока, устранив недостатки коллекторных машин.
Области применения двигателей постоянного тока
- Электротранспорт (электровозы, электропоезда, трамваи, троллейбусы)
- Станочное оборудование
- Прокатные станы
- Подъемно-транспортные механизмы
- Роботы и манипуляторы
- Приводы прецизионных станков
Двигатели постоянного тока незаменимы там, где требуется плавное регулирование скорости в широком диапазоне, высокая точность позиционирования, большой пусковой момент.
Типы двигателей постоянного тока
Существуют следующие основные типы двигателей постоянного тока:

- С независимым возбуждением
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С возбуждением от постоянных магнитов
Выбор типа двигателя зависит от требуемых характеристик и условий эксплуатации. Например, двигатели с последовательным возбуждением развивают большой пусковой момент и применяются на электротранспорте.
Регулирование скорости двигателей постоянного тока
Скорость вращения двигателя постоянного тока можно регулировать следующими способами:
- Изменением напряжения, подводимого к якорю
- Изменением тока возбуждения
- Введением добавочного сопротивления в цепь якоря
- Импульсным регулированием напряжения
Наиболее эффективным является регулирование изменением напряжения на якоре. Это позволяет получить плавное регулирование скорости в широком диапазоне при сохранении высокого КПД.
Достоинства и недостатки двигателей постоянного тока
Основные достоинства двигателей постоянного тока:
- Широкий диапазон регулирования скорости
- Высокая точность регулирования
- Большой пусковой момент
- Линейность характеристик
К недостаткам можно отнести:
- Наличие коллекторно-щеточного узла (в классических конструкциях)
- Относительно высокую стоимость
- Необходимость источника постоянного тока
Применение бесконтактных конструкций позволяет устранить основной недостаток, связанный с коллектором, сохранив все преимущества двигателей постоянного тока.
Устройство и принцип работы двигателя постоянного тока
Устройство и принцип работы двигателя постоянного тока
Электротехника занимает особое место в жизни современного человека. Электродвигатель входит в перечень популярных устройств, что находят применение в разных направлениях деятельности человека. Недавно был опубликован текст, где детально изложены все нюансы силового агрегатного механизма, функционирующего в сети переменного тока.
Тема этой статьи затрагивает двигатель постоянного тока: устройство и принцип действия системы, особенности конструкции, способы коммуникации с электросетью и прочие нюансы.
Особенности силового агрегата
Ответ на вопрос: «из чего состоит двигатель постоянного тока» выглядит так:
- 1. Вал для монтажа остальных компонентов.
- 2. Роторный элемент (якорь), в который входят:
- 2.1 Сердечник – комплекс металлических элементов, изготовленных из стального сплава для электротехники.
- 2.2 Обмотка.
- 2.3 Коллектор.
- 2.4 Главный полюс – комплекс металлических элементов (пластин). В случае небольших агрегатных механизмов допустимо производство полюсов из магнитов.
- 2.5 Обмотка возбуждения.
- 2.6 Цельные вспомогательные полюсы (в малогабаритных системах отсутствуют) позволяют оптимизировать коммутацию. Их размещают между ключевых полюсов.
- 2.7 Обмотка из окрашенной проводки вспомогательного полюса.
- 3. Корпус двигателя изготавливают из чугуна. Этот металл хорошо зарекомендовал себя при эксплуатации в экстремальных условиях. Он обладает оптимальным значением износостойкости. Чтобы улучшить корпус, инженеры разрабатывают конструкцию с ребрами, позволяющими соблюдать правильный баланс температур при эксплуатации агрегата. Полюсы и якорь монтируют в корпус. Они нужны для формирования индуктора.
- 4. Конечные элементы обмотки зоны полюсов подключается к коробке с клеммами. В этом техническом блоке имеются модули, обеспечивающие сопряжение с индуктором и щетками якоря. Имеются технологические разъемы, позволяющие установить сальники (нужны для подвода силового кабеля). Существуют устройства небольшой мощности. Конструкция такого двигателя допускает вывод обмотки в коробку с клеммами, при этом один из зажимов полюсов и траверса щеток должны находиться в плотной коммуникации в машине. В коробку клемм следует выводить оставшиеся зажимы. Большие силовые агрегаты эксплуатируют в условиях значительного номинального напряжения. Следовательно, отсутствует необходимость в монтаже коробки клемм. Нижний блок станины выступает в виде точки вывода проводки. В случае параллельной системы допустимо использовать силовые кабели. Последовательное соединение предусматривает наличие шин.
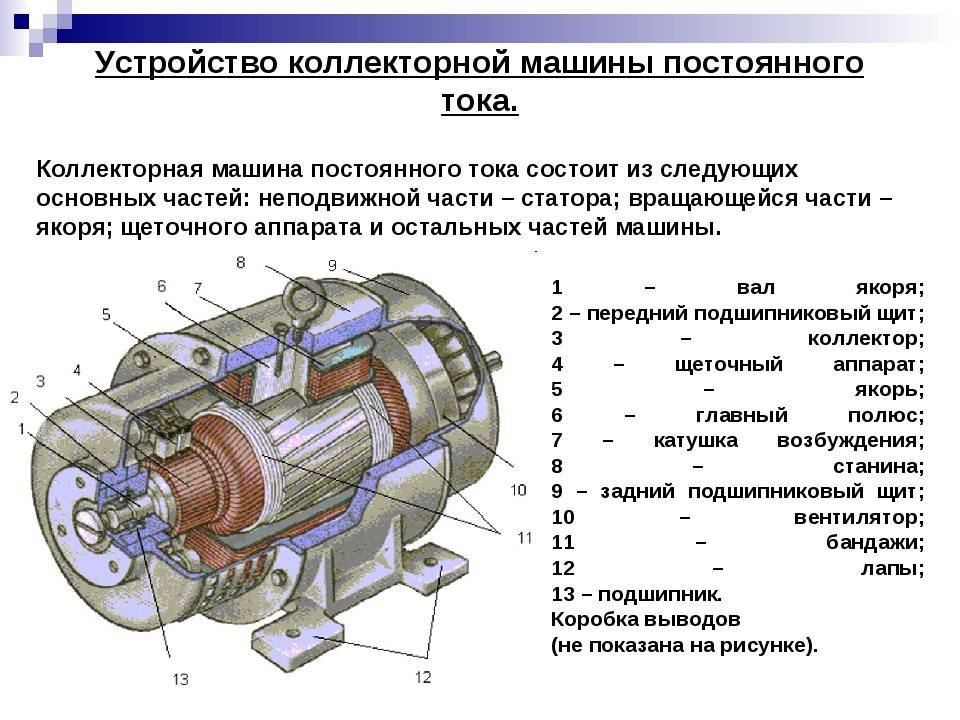
Устройство коллекторной машины постоянного тока предусматривает наличие следующих элементов:
- 1. Блок подшипников: щиты (на них монтируют наружные и внутренние крышки), шарнирные элементы.
- 2. Узел щеток: кронштейн, держатели, а также сами щетки. Система фиксируется на выпуклости крышки заднего щита. Она необходима для организации подачи энергии к ротору, а также для трансформации тока в якоре.
- 3. Вентилятор обеспечивает низкую температуру нагрева конструкции во время эксплуатации.
- 4. Пружины и болты для упрощения погрузки-разгрузки, а также установки двигателя.
- 5. Лапы для минимизации вибрации во время эксплуатации.
- 6. Кожух защиты вентилятора, а также кожух вывода обдува.
- 7. Шильдик с перечнем ключевых параметров.
Способы подключения
Особого внимания заслуживает подключение двигателя постоянного тока к сети 220. На коробке клемм указывается определенная маркировка на основании параметров двигателя. На базе этих данных выбирается способ подключения кабельной системы. Рассмотрим все способы подачи питания более подробно.
Запуск обмотки от независимых источников
Такое устройство функционирует в случае, когда напряжение на обмотке и якорь получают питание энергией от разных источников энергии. В зону размещения силового кабеля подключаются два двужильных провода (серый и синий). Предварительно зачищаются края. Позднее их оснащают наконечниками.
Далее следует начать подключать каждую из жил. Инструкция по коммуникациям между жилами и клеммами представлена во внутренней части коробки клемм. Рекомендуется четко следовать предложенной системе действий. В рассматриваемом случае система выглядит следующим образом:
- 1. Синяя жила первого провода соединяется с клеммой Н1, а к клемме Н2 подключается серая жила.
- 2. Синяя жила второго провода сопрягается с клеммой Я2, а к клемме Д2 присоединяют серую жилу.
Последовательное и параллельное возбуждение обмотки
Чтобы подключить такие агрегаты, нужно завести один двужильный кабель (должны быть синяя и серая жилы). Концы зачищаются и оснащаются наконечники. Рассмотрим особенности каждого из них.
Когда идет подключение системы с параллельной активацией обмотки, следует выполнить монтаж перемычек между контактной парой Д2 и Ш1, а также Я2 и Ш2. Соответственно серая жила подключается к клемме Д2, а синий провод соединяется с клеммой Я2. Возможно аналогичное сопряжение с модулями Ш1 и Ш2.
Когда наблюдается последовательная активация сети, ставят перемычку из гибкого материала с обеих сторон клемм С2 и Я2. Силовой кабель с наконечниками подключается так: серый элемент в коммуникации с клеммой Д2 (как и в случае, что описан выше), при этом синий фрагмент подключается к клемме С2.
Особенности функционирования
Принцип действия двигателя постоянного тока кратко – актуальный вопрос, интересующий многих пользователей. Рассмотрим его максимально подробно.
Происходит подача напряжения, начинается процесс циркуляции электричества по проводам обмотки. Можно заметить формирование зоны полярности между смежными полюсами. Образуется определенного рода магнитная система, провоцирующая возникновение магнитного поля. Коллектор передает стабильный поток энергии на якорь, при этом с двух сторон наблюдается коммуникация с созданным магнитным полем. Электромагнитная индукция запускает вращающий момент. Происходит поворот ротора. Активизируется система щеток. Обеспечивается постоянное вращение ротора за счет тесной коммуникации элементов.
В электрическом двигателе якорь может вращаться в любом направлении. Трансформировать обороты можно при помощи простого действия. Достаточно сменить направление тока в обмотке. Для этого меняется полярность питающих жил в коробке клемм. Такого эффекта удается достигнуть за счет перестановки кабеля положительного заряда в отрицательное положение, а отрицательного заряда – в положительное значение соответственно. Новая схема подключения выглядит так: серую жилу соединяют с клеммой Н1 (Я2), а синий провод прикрепляют к клемме Н2 (Д2).
Когда меняются полярные зоны в системе запуска и вращающегося элемента, преобразование движения не наблюдается. Изменения становятся возможны только в случае, когда меняется направление тока в обмотке или якоре. Задачу удается реализовать, когда происходит монтаж подготовленных перемычек между контактной группой С1, Д2, С2. Для этого используется серый кабель. Питание подключается в таком порядке: серая жила подключена к клемме С1, а синяя — к клемме Я2.
Перемычки между клеммами С1, Д2, С2 могут быть смонтированы при помощи синего провода. В этом случае схема подключения силового кабеля выглядит в обратном порядке от схемы, что изложена выше (серый провод соединяют с клеммой Я2, а синий провод сопрягают с клеммой С1).
Двигатель постоянного тока можно переключить в реверс. Для этого рекомендуется менять направление движения электричества в обмотке якоря. Подобное обстоятельство объясняет факт того, что обрыв провода в обмотке возбуждения может спровоцировать критическое увеличение ЭДС. В результате вероятнее всего будет наблюдаться пробой изоляции проводки.
Двигатель постоянного тока – это силовой агрегат, обеспечивающий функционирование электротехнических приспособлений. Выше детально рассмотрены устройство, принцип функционирования, а также способы подключения двигателя. Этот вопрос более детально изложен на видео, где специалисты на наглядном примере демонстрируют все нюансы, что описаны в этой статье.
Электродвигатель постоянного тока. Принцип действия и устройство. – www.motors33.ru
На рис. 1-1 представлена простейший электродвигатель постоянного тока, а на рис. 1-2 дано его схематическое изображение в осевом направлении. Неподвижная часть двигателя, называемая индуктор, состоит из полюсов и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в электродвигателе основного магнитного потока. Индуктор изображенной на рис. 1-1 имеет два полюса 1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу цилиндрического якоря 2 и коллектора. 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Обмотка якоря в показанном на рис. 1-1 и 1-2 простейшем электродвигателе имеет один виток. Концы витка соединены с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. На коллектор налегают две неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в нормальных электродвигателях постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током. Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу. Сердечники полюсов и ярмо также изготовляются из ферромагнитных материалов.
Рис. 1-1. Простейший электродвигатель постоянного тока
Рис. 1-2. Работа простейшего электродвигателя постоянного тока в режиме генератора (а) и двигателя (б).
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по «правилу правой руки» и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Двигатель постоянного тока.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного тока из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
Принцип действия двигателя постоянного тока: конструкция и особенности
Главной конструктивной и характерной принадлежностью машины постоянного тока, служит использование для присоединения к электрической сети коммутатора, предназначенного для преобразования величин постоянного тока в переменный ток. Коммутатор является непременным элементом любой машины этого типа ввиду того, что ее якорная обмотка двигателя подразумевает наличие переменного тока.
Особенности двигателя постоянного тока
Двигательные устройства постоянного тока отличаются широкими возможностями регулирования скорости вращения и обладают способностью сохранять во всем диапазоне регулирования высокий КПД, а также имеют в наличии механические характеристики, благодаря которым двигатели могут использоваться по специальному назначению, в соответствии с необходимыми требованиями.
Принцип работы
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того, как якорь и коллектор повернутся на 180 градусов виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того, чтобы снизить пульсацию в пазах якоря, прибавляют добавочное количество витков.
Конструкция двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора обеспечивается полюсными наконечниками.
Чередование полярности полюсов во время движения электрического тока достигается за счет соединения катушек главных полюсов в обмотку возбуждения. Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Бесконтактные электродвигатели постоянного тока
Для нормальной работы двигателя постоянного тока необходимо изменять направление тока в проводниках якорной обмотки при изменении его положения относительно полюсов магнитного поля статора. Это переключение в обычных двигателях постоянного тока обеспечивается с помощью коллектора, простейшая конструкция которого показана на рис. 2,в. Однако наличие этого устройства, принципиально необходимого для двигателей постоянного тока, вызывает появление у этих двигателей некоторых нежелательных свойств.
В первую очередь к ним относится необходимость постоянного надзора и ухода за коллекторно-щеточным узлом, так как при эксплуатации двигателя щетки истираются, а коллектор загрязняется и обгорает. Кроме того, неизбежное искрение щеточно-коллекторного аппарата создает радиопомехи, затрудняет применение двигателей во взрывоопасных помещениях и средах. Работа коллекторно-щеточного узла создает также дополнительный шум при работе двигателя.
Стремление устранить механический коллекторно-щеточный узел и заменить его каким-либо бесконтактным устройством с теми же функциями привело к появлению так называемых бесконтактных двигателей постоянного тока. Эти двигатели имеют такие же характеристики, как двигатели с обычным коллектором, но обладают более высокой надежностью и простотой в эксплуатации, не создают при своей работе радиопомех и дополнительного шума.
В настоящее время разработано несколько видов таких двигателей, отличающихся друг от друга способом возбуждения, схемами включения обмоток и типами электрических коммутирующих устройств.
Подробное описание всех типов бесконтактных двигателей постоянного тока выполнить очень трудно, поэтому остановимся лишь на пояснении основных принципов их действия, общих для всех двигателей.
Схема рис. 1 иллюстрирует принцип работы так называемого двигателя с вращающимся выпрямителем.
Рис. 1. Принцип работы бесконтактного двигателя постоянного тока с вращающимся выпрямителем.
Обмотка якоря изображена рамкой, состоящей из проводников А и Б, помещенных в поле магнита N—S.
Представим, что на якоре расположено устройство, состоящее из четырех управляемых ключей К1—К4, которые могут замыкаться или размыкаться любым необходимым нам образом. Эти ключи соединены в так называемую мостовую схему, к одной из диагоналей которой подключены проводники рамки А и Б, а к другой с помощью скользящих контактов СК подводится напряжение от внешнего источника постоянного тока.
Обратимся вначале к схеме на рис. 1,а. Пусть в указанном на этой схеме положении рамки будут замкнуты ключи К1 и КЗ и разомкнуты ключи К2 и К4. Тогда ток в проводниках А и Б будет иметь указанное на рисунке направление и рамка под действием сил F будет поворачиваться против часовой стрелки.
Рассмотрим теперь положение рамки после ее поворота на 180°, показанное на рис. 1,6. Допустим при этом, что ключи К1 и КЗ разомкнулись, а ключи К2 и К4 замкнулись. Тогда, как нетрудно заметить из рис. 1,6, ток в проводниках А к Б изменит свое направление на противоположное. Вследствие этого сохранится взаимное расположение полюсов магнитного поля и проводников с током, соответствующее показанному на рис. 1,а, а тем самым и направление момента и частоты вращения якоря двигателя. При повороте рамки еще на 180° (рис. 1,а) вновь должны замкнуться ключи К1 и КЗ и разомкнуться ключи К2 и К4 и так далее.
Таким образом, имея рассмотренную ключевую схему, в которой ключи управляются в зависимости от положения рамки (якоря) двигателя указанным способом, можно обеспечить обычную работу двигателя постоянного тока.
Однако преимущества рассмотренной схемы коммутации по сравнению с обычным коллектором (механическим коммутатором) проявятся, очевидно, лишь в том случае, если ключи К1—К4 будут бесконтактными элементами, например полупроводниковыми приборами. Поэтому в реальных бесконтактных двигателях постоянного тока в качестве ключей К1—К4 мостовой схемы, приведенной на рис. 15, используются транзисторы (для двигателей небольших мощностей) или управляемые полупроводниковые диоды-тиристоры (для двигателей средних и больших мощностей.). Открытие и закрытие транзисторов или тиристоров происходят по сигналам специального датчика положения, который укреплен на роторе и выдает управляющие импульсы на соответствующие бесконтактные ключи в зависимости от положения проводников обмотки.
Таким образом, необходимыми элементами бесконтактного двигателя являются мостовая переключающая схема с бесконтактными полупроводниковыми ключами и датчик положения, управляющий этими ключами.
Следует отметить, что в некоторых конструкциях двигателей в качестве ключей используются герметичные контакты (герконы).
Однако у такого двигателя имеется существенный недостаток: токоподвод к якорю происходит с помощью скользящего щеточного контакта. Хотя такой узел рис. 2. Бесконтактный двигатель постоянного тока с обмоткой переменного тока на статоре (щетка — контактное кольцо) и не создает столько неудобств, сколько щеточно-коллекторное устройство, его наличие все же является нежелательным.
Результатом разработок полностью бесконтактного двигателя постоянного тока является конструкция, показанная на рис. 2. Она во многом напоминает устройство синхронного двигателя с возбуждением от постоянных магнитов: ротор двигателя (в такой конструкции двигателя он часто называется индуктором) представляет собой постоянный магнит, а обмотка переменного тока (на рис. 2 показан лишь один ее виток) уложена на неподвижной части двигателя — статоре. В остальном конструкция двигателя соответствует схеме на рис. 1: питание обмотки осуществляется от одной диагонали мостовой схемы, на вторую диагональ которой подается напряжение сети постоянного тока. Ключи К1—К4, образующие мостовую схему, также управляются от датчика положения ДП, установленного на роторе двигателя. В качестве ключей используются, как правило, транзисторы или тиристоры. Датчик положения вырабатывает импульсы для управления ключами таким образом, чтобы обеспечивалось нужное направление тока в проводниках обмотки статора при изменении положения ротора (индуктора).
Остановимся теперь несколько подробнее на описании специфичных узлов бесконтактного двигателя постоянного тока: мостовой схемы и датчика положения. Назначением мостовой схемы, как уже отмечалось выше, является изменение направления тока в обмотке якоря при работе двигателя, или, другими словами, преобразование постоянного тока источника питания в переменный ток проводников обмотки якоря.
Такое устройство, преобразующее постоянный ток в переменный, называется инвертором в отличие от выпрямителя, который преобразует переменный ток в постоянный).
Рассмотрим одну из распространенных схем тиристорного инвертора — мостовую двухполупериодную однофазную схему, работа которой по существу и рассматривалась выше на примерах схем рис. 1 и 2.
Основную часть схемы инвертора (рис. 3,а) образуют четыре тиристора 77—Т4 (аналогия ключей К.1— К4 в схемах на рис. 1 и 2). Тиристоры управляются импульсами напряжения от датчика положения: при подаче импульсов тиристоры начинают пропускать ток — открываются, при снятии импульсов—закрываются (отметим, что при питании тиристоров от сети постоянного тока для их закрытия после снятия управляющего импульса должна использоваться специальная коммутационная схема, которая на рис. 2 не показана.
Рис. 3. Принцип работы инвертора.
а — электрическая схема; б — диаграмма токов в элементах инвертора.
Тиристоры работают попарно и попеременно: в течение половины оборота ротора двигателя включены (пропускают ток) тиристоры 77 и ТЗ, в течение второй половины оборота — тиристоры Т2 и Т4. Как видно из схемы, приведенной на рис. 3,а, при открытии тиристоров 77 и ТЗ ток в обмотке якоря имеет одно направление (сплошные стрелки на рисунке), а при открытии тиристоров Т2 и Т4 и закрытии тиристоров 77 и ТЗ ток изменит свое направление в обмотке якоря на противоположное (пунктирные стрелки).
Токовая диаграмма работы элементов схемы, приведенной на рис. 3,а, в зависимости от угла поворота а ротора двигателя показана на рис. 3,6, где 1Т, Ля — соответственно токи тиристоров и обмотки якоря.
Для бесконтактных двигателей постоянного тока разработано несколько типов датчиков положения ротора, которые при своей работе обычно используют энергию магнитного или электрического поля или лучевую энергию.
К датчикам, использующим энергию магнитного поля, относятся индуктивные датчики, датчики Холла, магниточувствительные сопротивления и магнитодиоды.
Индуктивные датчики в свою очередь подразделяются на датчики электродвижущей силы (ЭДС) вращения, датчики с переменным воздушным зазором и датчики с подмагничиванием. Наибольшее распространение для бесконтактных двигателей нашли дифференциальные трансформаторные датчики с переменным воздушным зазором. Эти датчики отличаются простотой и надежностью конструкции и вырабатывают импульсы для управления полупроводниковыми ключами инвертора с требуемыми параметрами.
Схема датчика положения этого типа показана на рис. 4.
Рис. 4. Схема датчика положения ДП бесконтактного двигателя.
Датчик состоит из Ш-образного сердечника 1 и цилиндрического якоря 2 с вырезом, соединяемого с ротором двигателя. На сердечнике датчика расположены три обмотки. Две из них, называемые обмотками возбуждения, располагаются на крайних стержнях и включаются последовательно-встречно. При таком их включении магнитный поток в среднем стержне всегда равен разности магнитных потоков от каждой обмотки возбуждения. На среднем стержне находится обмотка управления датчика, с которой снимается сигнал Uy для управления инвертором. Обычно обмотки возбуждения питаются от переменного напряжения повышенной частоты (в 10—20 раз превышающей частоту коммутации тока в проводниках обмотки якоря), что позволяет снизить габариты датчика.
Датчик работает следующим образом. Когда якорь датчика перекрывает все три стержня сердечника, магнитные потоки каждой обмотки возбуждения равны, ЭДС в катушке управления не наводится и импульсы управления на инвертор не подаются.
Если же якорь перекрывает средний стержень и один из крайних (что имеет место при показанном на рис. 4 положении ротора), то магнитные потоки обмоток возбуждения становятся различными, появляется магнитный поток в среднем стержне и в обмотке управления наводится ЭДС.
При непрерывном вращении якоря обмотка управления вырабатывает последовательность импульсов, при этом их продолжительность (а точнее, скважность — отношение длительности импульса к периоду повторяемости) определяется конфигурацией якоря. Так, при показанном на рис. 4 вырезе, составляющем половину окружности якоря, длительность импульса составляет половину периода.
Практически схемы таких датчиков положения содержат несколько сердечников, число которых соответствует количеству секций (проводников) обмотки якоря.
Перспективным является также применение датчиков положения, использующих гальваномагнитный эффект Холла. Сущность его заключается в том, что в некоторых полупроводниках при прохождении по их продольной оси электрического тока и воздействии внешнего магнитного поля на электродах поперечной оси возникает разность потенциалов. Таким образом, если датчик Холла поместить на статоре двигателя и подвести к нему ток по продольной оси, то при прохождении полюсов индуктора двигателя (или специального индуктора) вблизи датчика на электродах его поперечной оси появляется разность потенциалов (ЭДС датчика), которая может быть использована для управления инвертором.
В качестве датчиков положения могут использоваться различные магниточувствительные сопротивления и магнитодиоды, внутреннее сопротивление электрическому току которых зависит от величины внешнего магнитного потока.
Распространение получили также различные датчики, использующие лучевую энергию. Они состоят из источника излучения и приемника. Источниками лучистой энергии могут быть различные радиоактивные элементы, электрические лампы и светодиоды. В качестве приемников для этих датчиков применяются фоторезисторы, фотодиоды и фототриоды. Фототриоды обладают лучшими показателями работы — значительной чувствительностью и выходной мощностью, малой инерционностью, но являются более дорогими приборами.
Меньшее распространение для бесконтактных двигателей постоянного тока получили емкостные датчики — устройства, использующие для своей работы энергию электрического поля. По принципу своего действия они представляют собой конденсаторы, емкость которых зависит от положения индуктора двигателя. Эти датчики маломощны, подвержены влиянию паразитных емкостей, требуют дополнительных согласующих схем для совместной работы с инверторами.
Выше уже отмечалось, что по своему устройству бесконтактный двигатель постоянного тока во многом повторяет синхронный двигатель. Поэтому в принципе любой синхронный двигатель может быть превращен в бесконтактный двигатель постоянного тока, если обмотки статора питать от трехфазного инвертора, который будет управляться сигналами датчика положения, установленного на роторе (индукторе) этого синхронного двигателя. Такая система (синхронный двигатель—инвертор—датчик положения) обладает характеристиками и свойствами двигателя постоянного тока.
Вместе с тем электропромышленность выпускает и специально сконструированные бесконтактные двигатели постоянного тока. В основном это двигатели малой мощности, применяемые в различных устройствах автоматики, звукозаписывающей и звуковоспроизводящей аппаратуре, часовых и лентопротяжных механизмах, измерительной аппаратуре и т. д.
В табл. 1 приведены технические данные бесконтактных двигателей постоянного тока серии МБ.
Таблица 1
Двигатели этой серии имеют возбуждение от постоянных магнитов и снабжаются инвертором на транзисторах, который конструктивно выполнен в виде отдельного блока. Этот блок герметизирован и имеет объем от 400 до 900 см3. Датчик положения двигателей МБ трансформаторного типа встроен в корпус двигателя. Двигатели серии МБ допускают регулирование частоты вращения в широких пределах. Первые четыре двигателя, приведенные в табл. 1, имеют стабилизированную частоту вращения. Контроль частоты вращения осуществляется с помощью встроенного синхронного тахогенератора, имеющего при номинальной частоте вращения напряжение 6 В. Двигатели этой серии имеют нормальное исполнение с креплением двигателя за корпус (буква Н в названии двигателя) и фланцевое исполнение (буква Ф). Внешний диаметр двигателей серии МБ колеблется от 35 до 70 мм, а их длина — от 62 до 106 мм.
Работа и схемы электродвигателей постоянного тока
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
Шаговые двигатели. Принцип работы и управление
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
Двигатели постоянного тока
Прежде всего давайте определимся какую функцию выполняют двигатели. Они превращают электрическую энергию в механическую.
Первый электрический двигатель был создан в 1834 году русским учёным Борисом Семёновичем Якоби.
В деятельности человека находят свое применение электродвигатели самых разных конструкций. В производстве их используют для того, чтобы привести в движение станки и механизмы, трамваи, троллейбусы, электровозы и многое другое. Электродвигатели используются даже в игрушках.
Почему же все-таки именно электродвигатели, а не паровые двигатели или, например двигатели внутреннего сгорания? Основным преимуществом двигателя, работающего на электричестве, можно назвать то, что при его работе не выделяются вредные газы, дым или пар. Для их работы не нужны запасы топлива или воды. Электродвигатели легко установить в любом удобном месте: и на стене, и под полом трамвая или троллейбуса и даже в колесах лунохода.
На производстве и в быту чаще всего используют коллекторный электродвигатель. Перед вами модель простейшего коллекторного электродвигателя. Он состоит из неподвижной части – статора и вращающейся части – ротора. В качестве статора выступает постоянный магнит. Ротор состоит из якоря и коллектора. Простейшим якорем может быть электромагнит, который представляет собой сердечник и обмотку. На валу якоря укреплён коллектор, который представляет собой два полукольца. Они изолированы не только друг от друга, но и от вала двигателя. Каждый вывод обмотки якоря припаивают к отдельному полукольцу. Электрический ток от батареек поступает в обмотку якоря через щётки – специальные скользящие контакты. Щётки чаще всего представляют собой две упругие металлические пластины, которые соединены проводами с источником тока и прижаты к полукольцам коллектора.
Поскольку якорь – это электромагнит, то у него должны быть южный и северный полюса.
Давайте узнаем, как они образуются.
Щётки соединяются с источником тока так, как показано на рисунке. Благодаря такому соединению электрический ток, который проходит по обмотке якоря делает одну сторону якоря северным полюсом, а вторую – южным.
По схеме видно, что северный полюс якоря располагается рядом с северным полюсом статора, а южный полюс якоря – рядом с южным полюсом статора.
Одноименные магнитные полюса отталкиваются, и якорь начинает вращаться. Вместе с якорем поворачивается и коллектор.
Северный полюс якоря при вращении притягивается к южному полюсу статора. Но еще до того как они сблизятся полукольца коллектора притягиваются друг к другу и полярность якоря опять изменяется. То есть меняется направление тока в обмотке якоря. Другими словами, коллектор в электродвигателе – это специальный переключатель, который меняет направление в обмотке якоря автоматически.
Как только полярность якоря меняется, полюса вновь отталкиваются друг от друга и вращение продолжается.
В основном в качестве постоянного магнита для создания магнитного тока используют электромагниты.
Существует два способа подключения обмотки возбуждения к источнику тока: параллельно по отношению к обмотке якоря и последовательно ей.
От того каким именно способом присоединена обмотка возбуждения зависят свойства электродвигателя.
Если подключение параллельное, то с увеличением механической нагрузки на вал число оборотов двигателя практически не меняется. Двигатели с таким видом соединения обмотки возбуждения к якорю чаще всего используются для привода станков.
При последовательном соединении с увеличением механической нагрузки на вал, число оборотов резко уменьшается. Двигатели такого рода находят свое применение на электрическом транспорте.
По сравнению с полем постоянных магнитов, электромагнитное возбуждение двигателя позволяет не только усилить магнитное поле, но и управлять его интенсивностью.
Для того, чтобы управлять интенсивностью магнитного поля нужно реостатом менять величину тока в цепи обмотки возбуждения. Этим изменяется число оборотов двигателя.
Еще один способ менять число оборотов двигателя – смена напряжения на его зажимах. Но этот способ – более дорогой. Поскольку, если через реостат проходит весь ток двигателя, то появляются дополнительные потери электроэнергии.
Понятно, что мы рассмотрели очень упрощенную модель электродвигателя. Настоящий имеет более сложное строение.
В основном вместо постоянного магнита для создания магнитного поля статора используется мощный электромагнит. Обмотка возбуждения такого двигателя одновременно выполняет роль обмотки одного из полюсов. Соединять обмотки полюсов надо так, чтобы полюсные наконечники сердечников имели разную полярность, которая будет обращена к якорю.
Посмотрите, как выглядит вращающийся ротор двигателя. Он состоит из якоря и коллектора.
Чтобы коэффициент полезного действия двигателя возрастал, нужно на сердечнике якоря разместить несколько обмоток. Это приводит к тому, что в коллектор входит не два полукольца, а много медных пластин. Они изолированы не только друг от друга, но и от вала двигателя.
Графитовые щётки накладывают на коллектор. К гладкой поверхности коллектора щётки прижимают с помощью пружин. Движение якоря по валу напрямую передается рабочим органам потребителя. Вращается вал в подшипниках, которые запрессованы в переднюю и заднюю крышки статора. Охлаждается двигатель вентилятором, крыльчатка которого располагается на валу.
Подведем итоги урока.
Сегодня мы с вами говорили о двигателе постоянного тока. Выяснили устройство и принцип действия коллекторного электродвигателя. Узнали, что у него две основные части: неподвижная часть — статор, который представляет собой магнит, создающий постоянное магнитное поле. И вращающаяся часть – ротор. Составные части ротора – якорь и коллектор. Электрический ток от источника подается на обмотку якоря через щётки.
Рассмотрели два случая подключения обмотки возбуждения к источнику тока в роторе, состоящем из электромагнита.
И познакомились с устройством настоящего рабочего электродвигателя.
Принципы работы двигателя постоянного тока: преимущества и недостатки двигателей постоянного тока
Мы уже рассмотрели тему двигателей постоянного тока в отдельной статье, и на Linquip есть много статей о его различных типах, все из которых вы можете получить с помощью простого поиск. Но в этой статье мы специально собираемся обсудить, как это работает, и подробно остановимся на правилах, по которым сконструирован этот тип двигателя. Чтобы лучше понять принципы работы двигателей постоянного тока, мы предоставили информацию о целях создания и использования этих двигателей и их типах, а также об их преимуществах и недостатках, с которыми мы можем столкнуться.
Linquip собрал всю доступную информацию по этой теме, чтобы избавить вас от необходимости читать разрозненный контент. Оставайся с нами до конца. Для начала давайте посмотрим, что такое двигатель постоянного тока и что он для нас делает.
Что такое двигатель постоянного тока?
В этом разделе и прежде чем мы перейдем к основному предмету принципов работы двигателя постоянного тока, важно знать, что делает двигатель постоянного тока и какие части задействованы для работы такого устройства, как двигатели постоянного тока.
Двигатель постоянного тока — один из первых электродвигателей, предназначенных для преобразования электрической энергии постоянного тока в механическую.Это одно из величайших устройств, изобретенных людьми, и с тех пор оно произвело удивительную революцию в нашей жизни. Эта вращающаяся электрическая машина занимала разные типы, все они содержат почти одинаковые компоненты, которые взаимодействуют на основе либо механизма электронного, либо механизма электромеханического, который отвечает за изменение направления тока в двигателе.
Двигатель постоянного тока состоит из статора, якоря или ротора и коммутатора со щетками. Это основные компоненты, которые входят в состав всех двигателей постоянного тока.Если мы хотим очень кратко объяснить, как работает этот тип двигателя, мы должны сказать, что противоположная полярность между двумя магнитными полями двигателя заставляет его вращаться. Эти двигатели могут быть самыми простыми двигателями, доступными с точки зрения конструкции и производительности, но они имеют широкий спектр применения, включая те, которые используются в бытовых приборах, таких как электрические бритвы, и те, которые используются в различных отраслях промышленности.
Краткое описание различных типов двигателей постоянного тока
В предыдущем разделе мы обсудили, что делает двигатель постоянного тока и для каких целей он был изобретен.Позже мы кратко упомянули, как это работает в целом. Как мы отмечали ранее, у этого типа двигателей есть несколько подкатегорий, наиболее распространенными из которых являются последовательные, шунтирующие, постоянные магниты, бесщеточные и составные двигатели постоянного тока. Поскольку мы рассмотрели каждый из этих типов двигателей постоянного тока в отдельных статьях. Ниже мы кратко упомянем их на память.
Двигатели с постоянными магнитами, также известные как двигатели с постоянным магнитом, являются одними из двигателей постоянного тока, в которых для создания магнитного поля используется постоянный магнит.Этот тип двигателей постоянного тока обладает отличным пусковым моментом с хорошей регулировкой скорости. Имея ограниченный крутящий момент, обычно в устройствах с низкой мощностью используются двигатели с постоянными магнитами.
поле параллельных двигателей подключено параллельно обмоткам якоря. Этот тип двигателей обеспечивает прекрасное регулирование скорости благодаря тому, что шунтирующее поле может возбуждаться отдельно от обмоток якоря. Кроме того, параллельные двигатели также обеспечивают упрощенное управление реверсированием.
Серийный двигатель состоит из полевой обмотки с несколькими витками провода, по которому проходит ток якоря.Как и двигатели постоянного тока, серийные двигатели обладают большим пусковым моментом. Но в отличие от двигателей постоянного тока, серийные двигатели не могут регулировать скорость. Кроме того, если серийные двигатели работают без нагрузки, это может быть очень опасно. Эти ограничения делают серийные двигатели непригодными для применения в приводах с регулируемой скоростью.
Составные двигатели имеют шунтирующее поле, которое возбуждается отдельно, как и у параллельных двигателей постоянного тока. Составные двигатели постоянного тока похожи на постоянные и серийные двигатели с точки зрения обеспечения хорошего пускового момента, но у них есть некоторые проблемы с регулированием скорости в приводах с регулируемой скоростью.
Разработка принципа работы двигателей постоянного тока
Теперь, когда мы привыкли к назначению и наиболее часто используемым типам двигателей постоянного тока, будет легче понять, на каком основании и согласно каким правилам и нормам работают эти двигатели.
Двигатели постоянного тока работают по принципу электромагнетизма, который впервые ввел Фарадей. Принцип электромагнетизма Фарадея гласит, что проводник с током сталкивается с силой, когда его помещают в магнитное поле.С другой стороны, согласно правилу левой руки Флеминга, проводник всегда движется в направлении, перпендикулярном току и магнитному полю.
Как мы упоминали ранее, для лучшего понимания работы двигателя постоянного тока необходимо, чтобы мы знали все детали конструкции. Якорь — это вращающаяся часть, которая расположена между северным и южным полюсами постоянного или электромагнита, а статор — их неподвижная часть, магнитные поля которой взаимодействуют с магнитным полем ротора или якоря.
Катушка якоря, состоящая из коммутатора и щеток, подключена к источнику постоянного тока. Коммутатор превращает переменный ток, индуцированный в якоре, в постоянный, и щетки перемещают этот ток от вращающейся части двигателя к неподвижной внешней нагрузке.
Как работает двигатель постоянного тока?
В предыдущем разделе мы обнаружили, что двигатели постоянного тока работают на основе принципа электромагнетизма Фарадея и правила левой руки Флеминга. В этом разделе мы покажем вам, как именно работает двигатель постоянного тока и как его компоненты взаимодействуют для запуска этого устройства.
Статор двигателя постоянного тока имеет неподвижный набор магнитов и катушку с проводом, через которую проходит ток, чтобы создать электромагнитное поле, выровненное по центру катушки. Чтобы сконцентрировать магнитное поле. Одна или несколько обмоток изолированного провода намотаны вокруг сердечника двигателя.
Обмотки изолированного провода подключены к поворотному электрическому переключателю, который называется коммутатором, подающим электрический ток на обмотки. Коммутатор позволяет по очереди возбуждать каждую катушку якоря, создавая постоянную вращающую силу.
Для создания этой устойчивой вращающей силы, называемой также крутящим моментом, катушки якоря включаются и выключаются в последовательности, в результате чего создается вращающееся магнитное поле, которое взаимодействует с различными полями неподвижных магнитов в статоре.
Это взаимодействие между вращающимся магнитным полем и полем стационарных магнитов в статоре в конечном итоге заставляет его вращаться. Эти ключевые принципы работы двигателей постоянного тока позволяют им преобразовывать электрическую энергию из постоянного тока в механическую энергию посредством вращательного движения, которое затем может использоваться для приведения в движение объектов.
Преимущества и недостатки двигателей постоянного тока
Существует широкий ассортимент двигателей постоянного тока различных размеров и размеров, подходящих для различных нужд. Маленькие можно использовать в игрушках, инструментах и бытовой технике, а более крупные используются в лифтах и подъемниках, а также в двигателях электромобилей и промышленных приборов.
Хотя двигатели переменного тока снизили объем продаж двигателей постоянного тока из-за простой генерации и передачи с меньшими потерями на большие расстояния, необходимости меньшего обслуживания и возможности эксплуатации во взрывоопасных средах, двигатели постоянного тока по-прежнему используются там, где переменный ток не может удовлетворить потребности. .У двигателей постоянного тока есть свои уникальные особенности и важность в отраслях, которые компенсируют множество других преимуществ, которыми обладают двигатели переменного тока по сравнению с ними.
Выше мы упомянули некоторые недостатки DC по сравнению с AC. Ниже приведены некоторые из наиболее заметных преимуществ двигателей постоянного тока:
- Они подходят для низкоскоростного крутящего момента
- Они имеют регулируемую скорость
- Они предлагают широкий диапазон регулирования скорости как ниже, так и выше номинальной скорости
- Они имеют очень высокий и сильный пусковой крутящий момент
- Они используются в таких устройствах, как электропоезда и краны, которые в начальных условиях испытывают огромную нагрузку.
- Они более доступны по цене
- Их обслуживание простое и занимает мало времени
Заключение
в этой статье мы постарались дать вам основную и исчерпывающую информацию о принципах работы двигателя постоянного тока.мы говорили о конструкции и конструкции двигателей постоянного тока, о том, что они делают и для каких целей они были разработаны. Кроме того, для лучшего понимания мы привели базовую информацию о различных типах двигателей постоянного тока. Затем мы подошли к разделу, в котором рассказали о принципе работы и функциональных возможностях этого типа двигателя. В конце мы перечислили для вас некоторые особенности, недостатки и недостатки этого типа двигателя и упомянули, где этот тип двигателя обычно используется.
Если у вас есть опыт использования различных типов коллекторных двигателей, мы будем очень рады услышать ваше мнение в комментариях. Кстати, если у вас есть какие-либо вопросы по этой теме и вы все еще не уверены в этом устройстве, вы можете зарегистрироваться на нашем веб-сайте и дождаться, пока наши специалисты по Linquip ответят на ваши вопросы. Надеюсь, вам понравилась эта статья.
Машина постоянного тока — конструкция, работа, типы, уравнения ЭДС и приложения
Машины постоянного тока можно разделить на два типа, а именно двигатели постоянного тока и генераторы постоянного тока .Большинство машин постоянного тока эквивалентны машинам переменного тока, потому что они включают в себя как переменные токи, так и переменные напряжения. Выход машины постоянного тока является выходом постоянного тока, потому что они преобразуют напряжение переменного тока в напряжение постоянного тока. Преобразование этого механизма известно как коммутатор, поэтому эти машины также называются коммутаторами. Машина постоянного тока чаще всего используется в качестве двигателя. Основные преимущества этой машины включают регулировку крутящего момента, а также легкую скорость. Применение машины постоянного тока ограничено поездами, мельницами и шахтами.Например, в вагонах метро, а также в троллейбусах могут использоваться двигатели постоянного тока. В прошлом в автомобилях были установлены динамо-машины постоянного тока для зарядки батарей.
Что такое машина постоянного тока?
Машина постоянного тока — это электромеханическое устройство для преобразования энергии. Принцип работы машины постоянного тока заключается в том, что электрический ток течет через катушку в магнитном поле, а затем магнитная сила создает крутящий момент, который вращает двигатель постоянного тока. Машины постоянного тока подразделяются на два типа, такие как генератор постоянного тока и двигатель постоянного тока.
Машина постоянного токаОсновная функция генератора постоянного тока заключается в преобразовании механической энергии в электрическую мощность постоянного тока, тогда как двигатель постоянного тока преобразует мощность постоянного тока в механическую энергию. Электродвигатель переменного тока часто используется в промышленных приложениях для преобразования электрической энергии в механическую. Однако двигатель постоянного тока применим там, где необходимо хорошее регулирование скорости и широкий диапазон скоростей, например, в системах электрических транзакций.
Конструкция машины постоянного тока
Конструкция машины постоянного тока может быть выполнена с использованием некоторых основных частей, таких как ярмо, полюсный сердечник и полюсные наконечники, полюсная катушка и обмотка возбуждения, сердечник якоря, обмотка якоря или проводник, коммутатор, щетки и подшипники.Некоторые из частей машины постоянного тока обсуждаются ниже.
Конструкция машины постоянного токаХомут
Другое название ярма — рама. Основная функция ярма в машине — обеспечить механическую опору, предназначенную для столбов, и защитить всю машину от влаги, пыли и т. Д. Материалы, используемые в ярме, изготовлены из чугуна, литой стали или прокатной стали.
Полюс и полюс сердечник
Полюс машины постоянного тока представляет собой электромагнит, а обмотка возбуждения намотана между полюсами.Когда обмотка возбуждения находится под напряжением, полюс дает магнитный поток. Материалы, используемые для этого, — литая сталь, чугун или сердечник полюса. Он может быть изготовлен из отожженных стальных пластин для уменьшения падения мощности из-за вихревых токов.
Полусапожки
Башмак для столба в машине постоянного тока является обширной деталью, а также для увеличения области полюса. Из-за этой области поток может распространяться внутри воздушного зазора, а также дополнительный поток может проходить через воздушное пространство к якорю.Материал, используемый для изготовления полюсного башмака, — это чугун, в противном случае — литой конь, а также использовалась отожженная стальная пластина, чтобы уменьшить потери мощности из-за вихревых токов.
Обмотки возбуждения
В этом случае обмотки намотаны в области полюсного сердечника и называются катушкой возбуждения. Когда ток подается через обмотку возбуждения, он приводит в действие полюсы, которые создают необходимый магнитный поток. Материал обмоток возбуждения — медь.
Сердечник якоря
Сердечник арматуры включает в себя огромное количество слотов по краю.В этих пазах находится провод якоря. Он обеспечивает путь с низким сопротивлением к потоку, создаваемому обмоткой возбуждения. Материалы, используемые в этом сердечнике, представляют собой материалы с низкой магнитной проницаемостью, такие как литое железо. Ламинирование используется для уменьшения потерь из-за вихревых токов.
Обмотка якоря
Обмотка якоря может быть образована путем соединения между собой проводников якоря. Когда обмотка якоря поворачивается с помощью первичного двигателя, в ней индуцируется как напряжение, так и магнитный поток.Эта обмотка подключена к внешней цепи. Материалы, используемые для этой обмотки, представляют собой проводящий материал, такой как медь.
Коммутатор
Основная функция коммутатора в машине постоянного тока — собирать ток с проводника якоря, а также подавать ток на нагрузку с помощью щеток. А также обеспечивает однонаправленный крутящий момент для двигателя постоянного тока. Коммутатор может быть построен с огромным количеством сегментов в форме ребра жестко тянутой меди. Сегменты в коммутаторе защищены тонким слоем слюды.
Кисти
Щетки в машине постоянного тока собирают ток от коммутатора и подают его на внешнюю нагрузку. Щетки изнашиваются со временем, чтобы часто проверять. В щетках используются графит, в противном случае — углерод, имеющий прямоугольную форму.
Типы машин постоянного тока
Возбуждение машины постоянного тока подразделяется на два типа, а именно: раздельное возбуждение и самовозбуждение. В машинах постоянного тока с отдельным типом возбуждения катушки возбуждения активируются отдельным источником постоянного тока.В машинах постоянного тока с самовозбуждением ток через обмотку возбуждения подается вместе с машиной. Основные типы машин постоянного тока подразделяются на четыре типа, включая следующие.
- Машина постоянного тока с независимым возбуждением
- Шунтирующий / шунтирующий аппарат. Машина для намотки / серии
- .
- Машина для комплексных обмоток / составных обмоток.
с раздельным возбуждением
В машине с независимым возбуждением постоянного тока для активации катушек возбуждения используется отдельный источник постоянного тока.
Шунтирующая рана
В машинах постоянного тока с шунтирующей обмоткой катушки возбуждения соединены параллельно через якорь . Поскольку шунтирующее поле получает полное напряжение o / p генератора, иначе — напряжение питания двигателя, оно обычно состоит из огромного количества витков тонкой проволоки с небольшим током возбуждения.
Обмотка серииВ машинах постоянного тока с последовательной намоткой катушки возбуждения соединены последовательно через якорь. Поскольку последовательная обмотка возбуждения получает ток якоря, а также большой ток якоря, в связи с этим последовательная обмотка возбуждения включает в себя несколько витков проволоки с большим поперечным сечением.
Составная рана
Составная машина включает как последовательные, так и шунтирующие поля. Две обмотки подключены к каждому полюсу машины. Последовательная намотка машины включает в себя несколько витков огромной области поперечного сечения, а также шунтирующие обмотки, включающие несколько витков тонкой проволоки.
Подключение составной машины можно выполнить двумя способами. Если шунтирующее поле соединено параллельно только якорем, то машину можно назвать « короткой шунтирующей составной машиной », и если шунтирующее поле соединено параллельно как арматурой, так и последовательным полем, тогда машина называется «машина с длинным шунтом».
Уравнение ЭДС машины постоянного тока
Машина постоянного тока e.m.f может быть определена как когда якорь в машине постоянного тока вращается, напряжение может генерироваться внутри катушек. В генераторе ЭДС вращения можно назвать генерируемой ЭДС, а Er = Eg. В двигателе ЭДС вращения можно назвать встречной или обратной ЭДС, а Er = Eb.
Пусть Φ — полезный поток для каждого полюса в пределах webers
P — общее количество полюсов
z — общее количество проводников внутри якоря
n — частота вращения якоря в оборот за секунду
А — это нет.параллельных полос по всей арматуре среди щеток противоположной полярности.
Z / A — это нет. проводов якоря в серии для каждой параллельной полосы
Поскольку магнитный поток для каждого полюса равен ‘Φ’, каждый проводник режет магнитный поток ‘PΦ’ за один оборот.
Напряжение, создаваемое для каждого проводника = наклон потока на каждый оборот в WB / Время, затраченное на один оборот в секундах
Поскольку «n» оборотов совершаются за одну секунду, а 1 оборот будет выполнен за 1 / n секунду.Таким образом, время одного оборота якоря составляет 1 / нсек.
Нормативное значение производимого напряжения для каждого проводника
p Φ / 1 / n = np Φ вольт
Вырабатываемое напряжение (E) может быть определено с помощью количества проводов якоря в серии I на любой отдельной дорожке между щетками, таким образом, создаваемое напряжение в целом
E = стандартное напряжение для каждого проводника x № проводов в серии на каждую полосу
E = n.P.Φ x Z / A
Вышеупомянутое уравнение — это e.м.ф. уравнение машины постоянного тока.
Машина постоянного тока против машины переменного тока
Разница между двигателем переменного тока и двигателем постоянного тока заключается в следующем.
|
Двигатель переменного тока |
Двигатель постоянного тока |
| Двигатель переменного тока — это электрическое устройство, которое приводится в действие от сети переменного тока | .Двигатель постоянного тока — это один из видов вращающихся двигателей, используемых для изменения энергии постоянного тока на механическую. |
| Они подразделяются на два типа, такие как синхронные и асинхронные двигатели. | Эти двигатели доступны в двух типах, например, щеточные двигатели. |
| Электродвигатель переменного тока питается от переменного тока | Входное питание двигателя постоянного тока — постоянный ток |
| В этом двигателе нет щеток и коммутаторов. | В этом двигателе присутствуют угольные щетки и коммутаторы. |
| Входные фазы питания двигателей переменного тока одно- и трехфазные | Входные фазы питания двигателей постоянного тока однофазные |
| Характеристики якоря двигателей переменного тока: якорь неактивен, а магнитное поле вращается. | Характеристики якоря двигателей постоянного тока: якорь поворачивается, а магнитное поле остается неактивным. |
| Он имеет три входных терминала, таких как RYB. | Он имеет две входные клеммы, такие как положительный и отрицательный |
| Управление скоростью двигателя переменного тока может осуществляться путем изменения частоты. | Регулировка скорости двигателя постоянного тока может осуществляться путем изменения тока обмотки якоря |
| КПД двигателя переменного тока ниже из-за потери индукционного тока и скольжения двигателя. | Эффективность двигателя постоянного тока высока из-за отсутствия индукционного тока и скольжения. |
| Не требует обслуживания | Требует обслуживания |
| Двигатели переменного тока используются везде, где требуется высокая скорость, а также переменный крутящий момент. | Двигатели постоянного токаиспользуются везде, где требуется регулируемая скорость, а также высокий крутящий момент. |
| На практике они используются в крупных отраслях промышленности | На практике они используются в бытовой технике |
Потери в машине постоянного тока
Мы знаем, что основная функция машины постоянного тока заключается в преобразовании механической энергии в электрическую.При использовании этого метода преобразования вся входная мощность не может быть преобразована в выходную мощность из-за потерь мощности в различных формах. Тип потери может меняться от одного устройства к другому. Эти потери снизят эффективность устройства, а также увеличат температуру. Потери энергии в машинах постоянного тока можно разделить на электрические, в противном случае — потери на медь, потери в сердечнике или потери в железе, механические потери, потери в щетках и потери при рассеянной нагрузке.
Преимущества машины постоянного тока
К достоинствам этой машины можно отнести следующее.
- Машины постоянного тока, такие как двигатели постоянного тока, имеют различные преимущества, такие как высокий пусковой крутящий момент, реверсирование, быстрый запуск и остановка, изменяемые скорости через входное напряжение
- Они очень легко контролируются, а также дешевле по сравнению с AC .
- Контроль скорости хороший
- Крутящий момент высокий
- Работа бесшовная
- Без гармоник
- Простота установки и обслуживания
Применение машины постоянного тока
В настоящее время производство электроэнергии может производиться в больших объемах в виде переменного тока (переменного тока).Следовательно, использование машин постоянного тока, таких как двигатели и генераторы, генераторы постоянного тока крайне ограничено, поскольку они используются в основном для обеспечения возбуждения генераторов переменного тока крошечного и среднего диапазона. В промышленности машины постоянного тока используются для различных процессов, таких как сварка, электролитика и т. Д.
Обычно генерируется переменный ток, который затем преобразуется в постоянный ток с помощью выпрямителей. Следовательно, генератор постоянного тока подавляется с помощью источника переменного тока, который выпрямляется для использования в нескольких приложениях.Двигатели постоянного тока часто используются в качестве приводов с регулируемой скоростью и там, где происходят серьезные изменения крутящего момента.
Применение машины постоянного тока в качестве двигателя используется путем разделения на три типа, таких как последовательные, шунтирующие и составные, тогда как применение машины постоянного тока в качестве генератора подразделяется на генераторы с раздельным возбуждением, последовательные и шунтирующие генераторы.
Таким образом, речь идет о машинах постоянного тока. Из приведенной выше информации, наконец, мы можем сделать вывод, что машины постоянного тока — это генератор постоянного тока и двигатель постоянного тока.Генератор постоянного тока в основном используется для подачи источников постоянного тока к машине постоянного тока на электростанциях. В то время как двигатель постоянного тока приводит в действие некоторые устройства, такие как токарные станки, вентиляторы, центробежные насосы, печатные машины, электровозы, подъемники, краны, конвейеры, прокатные станы, авто-рикши, льдогенераторы и т. Д. Вот вопрос для вас, что такое коммутация в машина постоянного тока?
Двигатель постоянного тока— Основы, конструкция, типы и применение
Почти каждое механическое развитие, которое мы видим вокруг себя, достигается с помощью электродвигателя.Электрические машины — это способ преобразования энергии. Двигатели потребляют электрическую энергию и производят механическую энергию. Электродвигатели используются для питания сотен устройств, которые мы используем в повседневной жизни. Электродвигатели в целом подразделяются на две разные категории: двигатели постоянного тока (DC) и двигатели переменного тока (AC). В этой статье мы собираемся обсудить двигатель постоянного тока и его работу. А также как работают редукторные двигатели постоянного тока.
Что такое двигатель постоянного тока?
Двигатель постоянного тока — это электродвигатель, работающий от постоянного тока.В электродвигателе работа зависит от простого электромагнетизма. Проводник с током создает магнитное поле, и когда он помещается во внешнее магнитное поле, он сталкивается с силой, пропорциональной току в проводнике и силе внешнего магнитного поля. Это устройство, преобразующее электрическую энергию в механическую. Он работает на том факте, что проводник с током, помещенный в магнитное поле, испытывает силу, которая заставляет его вращаться относительно исходного положения.Практический двигатель постоянного тока состоит из обмоток возбуждения, обеспечивающих магнитный поток, и якоря, который действует как проводник.
Бесщеточный двигатель постоянного токаНа вход бесщеточного двигателя постоянного тока подается ток / напряжение, а на выходе — крутящий момент. Понять работу двигателя постоянного тока очень просто из базовой схемы, показанной ниже. Двигатель постоянного тока в основном состоит из двух основных частей. Вращающаяся часть называется ротором, а неподвижная часть также называется статором. Ротор вращается относительно статора.
Ротор состоит из обмоток, которые электрически связаны с коммутатором. Геометрия щеток, контактов коммутатора и обмоток ротора такова, что при подаче питания полярности обмотки под напряжением и магнитов статора смещены, и ротор будет вращаться до тех пор, пока он почти не будет выпрямлен полевыми магнитами статора.
Когда ротор достигает выравнивания, щетки перемещаются к следующим контактам коммутатора и включают следующую обмотку.Вращение меняет направление тока через обмотку ротора, вызывая переворот магнитного поля ротора, заставляя его продолжать вращаться.
Конструкция двигателя постоянного тока
Конструкция двигателя постоянного тока показана ниже. Очень важно знать его конструкцию, прежде чем узнавать, что она работает. Важнейшими частями этого двигателя являются якорь и статор.
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКАКатушка якоря — это вращающаяся часть, а неподвижная часть — это статор. При этом катушка якоря подключена к источнику постоянного тока, который включает в себя щетки, а также коммутаторы.Основная функция коммутатора — преобразовывать переменный ток в постоянный, индуцируемый в якоре. Подача тока может быть обеспечена с помощью щетки от вращающейся части двигателя к неактивной внешней нагрузке. Расположение якоря может быть выполнено между двумя полюсами электромагнита или постоянным.
Детали двигателя постоянного тока
В двигателях постоянного тока существуют различные популярные конструкции двигателей, такие как бесщеточные двигатели с постоянным магнитом, серийные, с составной обмоткой, шунтирующие шунты или стабилизированные шунты.В целом, части двигателя постоянного тока в этих популярных конструкциях одинаковы, но вся работа этого двигателя одинакова. Основные части двигателя постоянного тока включают следующее.
Статор
Стационарная часть, такая как статор, является одной из частей двигателя постоянного тока, которая включает в себя обмотки возбуждения. Основная функция этого — получение снабжения.
Ротор
Ротор — это динамическая часть двигателя, которая используется для создания механических оборотов агрегата.
Щетки
Щетки, в которых используется коммутатор, в основном работают как мост, фиксируя неподвижную электрическую цепь по направлению к ротору.
Коммутатор
Это разрезное кольцо с медными сегментами. Это также одна из самых важных частей двигателя постоянного тока.
Обмотки возбуждения
Эти обмотки сделаны с катушками возбуждения, которые известны как медные провода. Эти обмотки охватывают примерно прорези в полюсных наконечниках.
Обмотки якоря
Эти обмотки в двигателе постоянного тока имеют два типа конструкции, такие как Lap и Wave.
Хомут
Магнитная рама, такая как ярмо, иногда изготавливается из чугуна или стали.Работает как охранник.
Поляки
Полюса в двигателе состоят из двух основных частей, таких как полюсный сердечник и полюсные наконечники. Эти важные части соединены друг с другом посредством гидравлической силы и соединены с вилкой.
Зубья / прорезь
Непроводящие вкладыши паза часто застревают между стенками паза, а также катушками для защиты от царапин, механической поддержки и дополнительной электроизоляции. Магнитный материал между пазами называется зубцами.
Корпус двигателя
Корпус двигателя поддерживает щетки, подшипники и железный сердечник.
Принцип работы
Электрическая машина, которая используется для преобразования энергии из электрической в механическую, известна как двигатель постоянного тока. Принцип работы двигателя постоянного тока заключается в том, что когда проводник с током находится в магнитном поле, он испытывает механическую силу. Это направление силы может быть определено с помощью правила левой руки Флемминга, а также ее величины.
Если первый палец вытянут, второй палец, а также большой палец левой руки будут расположены вертикально друг к другу, и основной палец указывает направление магнитного поля, следующий палец означает текущее направление, а большой палец, подобный третьему пальцу, означает направление силы, действующей через проводник.
F = BIL Ньютонов
Где,
‘B’ — плотность магнитного потока,
«I» — текущий
‘L’ — длина проводника в магнитном поле.
Каждый раз, когда обмотка якоря подводится к источнику постоянного тока, в обмотке устанавливается ток. Обмотка возбуждения или постоянные магниты создают магнитное поле. Таким образом, проводники якоря будут испытывать силу из-за магнитного поля, основанного на вышеуказанном принципе.
Коммутатор спроектирован как секции для достижения однонаправленного крутящего момента, иначе путь силы перевернулся бы каждый раз, когда путь движения проводника перевернулся в магнитном поле.Итак, это принцип работы двигателя постоянного тока.
Типы двигателей постоянного тока
Различные типы двигателей постоянного тока обсуждаются ниже.
Мотор-редукторы постоянного тока
Мотор-редукторы имеют тенденцию снижать скорость двигателя, но с соответствующим увеличением крутящего момента. Это свойство пригодится, поскольку двигатели постоянного тока могут вращаться со скоростью, слишком высокой для электронного устройства. Мотор-редукторы обычно состоят из щеточного двигателя постоянного тока и редуктора, прикрепленного к валу.Двигатели различаются как приводные от двух соединенных между собой агрегатов. Он имеет множество приложений из-за затрат на проектирование, упрощение и создание приложений, таких как промышленное оборудование, приводы, медицинские инструменты и робототехника.
- Ни один хороший робот не может быть построен без шестеренок. Учитывая все обстоятельства, очень важно хорошее понимание того, как шестерни влияют на такие параметры, как крутящий момент и скорость.
- Шестерни работают по принципу механического преимущества. Это означает, что, используя разные диаметры шестерен, мы можем менять скорость вращения и крутящий момент.Роботы не имеют желаемого отношения скорости к крутящему моменту.
- В робототехнике крутящий момент лучше скорости. С помощью шестерен можно менять высокую скорость на лучший крутящий момент. Увеличение крутящего момента обратно пропорционально снижению скорости.
Редукторный двигатель постоянного тока
Понижение скорости в шестернях состоит из того, что маленькая шестерня приводит в движение большую шестерню. В редукторе может быть несколько комплектов этих редукторов.
Снижение скорости мотор-редуктора постоянного токаИногда целью использования мотор-редуктора является уменьшение скорости вращения вала двигателя в приводимом устройстве, например, в небольших электрических часах, где крошечный синхронный двигатель может вращаться со скоростью 1200 об / мин. уменьшается до одного об / мин, чтобы вращать секундную стрелку, и дополнительно уменьшается в часовом механизме, чтобы вращать минутную и часовую стрелки.Здесь величина движущей силы не имеет значения, пока ее достаточно для преодоления фрикционных ударов часового механизма.
Двигатель постоянного тока серииДвигатель серии
A — это двигатель постоянного тока, в котором обмотка возбуждения внутри последовательно соединена с обмоткой якоря. Серийный двигатель обеспечивает высокий пусковой крутящий момент, но никогда не должен работать без нагрузки и способен перемещать очень большие нагрузки на валу при первом включении. Серийные двигатели также известны как двигатели с последовательной обмоткой.
В последовательных двигателях обмотки возбуждения последовательно соединены с якорем. Напряженность поля зависит от тока якоря. Когда его скорость снижается из-за нагрузки, серийный двигатель развивает более высокий крутящий момент. Его пусковой момент больше, чем у других двигателей постоянного тока.
Он также может легче излучать тепло, накопленное в обмотке из-за большого количества протекающего тока. Его скорость значительно меняется между полной и нулевой нагрузкой.Когда нагрузка снимается, скорость двигателя увеличивается, а ток через якорь и катушки возбуждения уменьшается. Работа больших машин без нагрузки опасна.
Двигатель серииТок через якорь и катушки возбуждения уменьшается, сила магнитных линий вокруг них ослабевает. Если бы сила магнитных линий вокруг катушек уменьшалась с той же скоростью, что и ток, протекающий через них, то обе будут уменьшаться с той же скоростью на
., который увеличивает скорость двигателя.
Преимущества
Преимущества серийного двигателя заключаются в следующем.
- Огромный пусковой крутящий момент
- Простая конструкция
- Проектировать легко
- Простое техническое обслуживание
- Экономичный
Приложения
Двигатели сериимогут создавать огромную крутящую мощность, крутящий момент из состояния холостого хода. Эта характеристика делает серийные двигатели подходящими для небольших электроприборов, универсального электрооборудования и т. Д.Серийные двигатели не подходят, когда требуется постоянная скорость. Причина в том, что скорость серийных двигателей сильно варьируется в зависимости от нагрузки.
Параллельный двигатель
Параллельные двигатели — это параллельные двигатели постоянного тока, в которых обмотки возбуждения шунтированы или подключены параллельно обмотке якоря двигателя. Шунтирующий двигатель постоянного тока обычно используется из-за его наилучшего регулирования скорости. Следовательно, и обмотка якоря, и обмотки возбуждения имеют одинаковое напряжение питания, однако существуют отдельные ветви для потока тока якоря и тока возбуждения.
Параллельный двигатель имеет несколько отличительных рабочих характеристик от последовательного двигателя. Поскольку катушка шунтирующего возбуждения сделана из тонкой проволоки, она не может производить большой ток для запуска, как последовательное поле. Это означает, что параллельный двигатель имеет чрезвычайно низкий пусковой момент, что требует, чтобы нагрузка на вал была довольно небольшой.
Шунтирующий двигательКогда на шунтирующий двигатель подается напряжение, через шунтирующую катушку протекает очень слабый ток. Якорь параллельного двигателя аналогичен серийному двигателю, и он потребляет ток для создания сильного магнитного поля.Из-за взаимодействия магнитного поля вокруг якоря и поля, создаваемого вокруг шунтирующего поля, двигатель начинает вращаться.
Как и в серийном двигателе, когда якорь начинает вращаться, он производит обратную ЭДС. Обратная ЭДС приведет к тому, что ток в якоре начнет уменьшаться до очень небольшого уровня. Величина тока, потребляемого якорем, напрямую зависит от размера нагрузки, когда двигатель достигает полной скорости. Поскольку нагрузка обычно мала, ток якоря будет небольшим.
Преимущества
К преимуществам параллельного двигателя можно отнести следующее.
- Простое управление, обеспечивающее высокий уровень гибкости для решения сложных проблем привода
- Высокая доступность, поэтому требуются минимальные усилия по обслуживанию
- Высокий уровень электромагнитной совместимости
- Очень плавный ход, поэтому низкая механическая нагрузка на всю систему и высокие динамические процессы управления
- Широкий диапазон регулирования и низкие скорости, поэтому универсальное применение
Приложения
Электродвигатели постоянного токаидеально подходят для систем с ременным приводом.Этот двигатель с постоянной скоростью используется в промышленных и автомобильных приложениях, таких как станки и намоточные / разматывающие машины, где требуется высокая точность крутящего момента.
Составные двигатели постоянного тока
Составные двигателипостоянного тока включают в себя шунтирующее поле с независимым возбуждением, которое имеет отличный пусковой крутящий момент, однако он сталкивается с проблемами в приложениях с регулируемой скоростью. Поле в этих двигателях может быть подключено последовательно через якорь, а также через шунтирующее поле, которое возбуждается отдельно.Последовательное поле дает превосходный пусковой момент, тогда как шунтирующее поле дает улучшенное регулирование скорости. Но последовательное поле вызывает проблемы с управлением в приводах с регулируемой скоростью и обычно не используется в 4-квадрантных приводах.
с раздельным возбуждением
Как следует из названия, обмотки возбуждения иначе катушки запитываются через отдельный источник постоянного тока. Уникальность этих двигателей заключается в том, что ток якоря не проходит через обмотки возбуждения, поскольку обмотка возбуждения усилена от отдельного внешнего источника постоянного тока.Уравнение крутящего момента двигателя постоянного тока: Tg = Ka φ Ia. В этом случае крутящий момент изменяется посредством изменения магнитного потока поля «φ» & независимо от тока якоря «Ia».
Самовозбуждение
Как следует из названия, в этом типе двигателя ток в обмотках может подаваться через двигатель, в противном случае — через саму машину. Кроме того, этот двигатель разделен на двигатель с последовательной обмоткой и двигатель с параллельной обмоткой.
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянным магнитом или постоянным магнитом имеет обмотку якоря.Эти двигатели разработаны с постоянными магнитами, размещенными на внутренней стороне сердечника статора для создания магнитного потока. С другой стороны, ротор включает в себя обычный якорь постоянного тока, включая щетки и сегменты коммутатора.
В двигателе постоянного тока с постоянными магнитами магнитное поле может быть создано с помощью постоянного магнита. Таким образом, входной ток не используется для возбуждения, которое используется в кондиционерах, дворниках, автомобильных стартерах и т. Д.
Подключение двигателя постоянного тока к микроконтроллеру
Микроконтроллеры не могут управлять двигателями напрямую.Итак, нам нужен какой-то драйвер для управления скоростью и направлением двигателей. Драйверы двигателей будут действовать как устройства взаимодействия между микроконтроллерами и двигателями. Драйверы двигателей будут действовать как усилители тока, поскольку они принимают управляющий сигнал низкого тока и выдают сигнал высокого тока. Этот сильноточный сигнал используется для привода двигателей. Использование микросхемы L293D — простой способ управления двигателем с помощью микроконтроллера. Он содержит внутри две схемы драйвера H-моста.
Эта микросхема предназначена для управления двумя моторами.L293D имеет два набора устройств, где 1 набор имеет вход 1, вход 2, выход 1, выход 2 с разрешающим контактом, в то время как другой набор имеет вход 3, вход 4, выход 3, выход 4 с другим разрешающим контактом. Вот видео, относящееся к L293D
Вот пример двигателя постоянного тока, который связан с микроконтроллером L293D. Двигатель постоянного тока, соединенный с микроконтроллером L293DL293D имеет два набора устройств, в которых один набор имеет вход 1, вход 2, выход 1 и выход 2, а другой набор имеет вход 3, вход 4, выход 3 и выход 4, в соответствии с вышеизложенным. диаграмма,
- Если штифты № 2 и 7 высокие, то штифты № 3 и 6 также высокие.Если разрешение 1 и штифт 2 имеют высокий уровень, а штифт 7 остается низким, двигатель вращается в прямом направлении.
- Если разрешение 1 и штифт 7 высокие, а штифт 2 низкий, то двигатель вращается в обратном направлении.
Сегодня двигатели постоянного тока все еще используются во многих областях, таких как игрушки и дисководы, или в больших размерах для работы сталепрокатных станов и бумагоделательных машин.
Уравнения двигателя постоянного тока
Величина испытываемого потока составляет
.F = BlI
Где, B- Плотность потока, создаваемого обмотками возбуждения
l- Активная длина жилы
I-ток, проходящий через проводник
При вращении проводника индуцируется ЭДС, действующая в направлении, противоположном подаваемому напряжению.Дается как
Где, Ø- Флуз из-за обмоток возбуждения
P- Количество полюсов
Константа А-А
Н — Скорость двигателя
Z- Количество проводников
Напряжение питания, В = E b + I a R a
Развиваемый крутящий момент
Таким образом, крутящий момент прямо пропорционален току якоря.
Кроме того, скорость зависит от тока якоря, следовательно, крутящий момент и скорость двигателя косвенно зависят друг от друга.
Для параллельного двигателя постоянного тока скорость остается почти постоянной, даже если крутящий момент увеличивается от холостого хода до полной нагрузки.
Для двигателя постоянного тока скорость уменьшается по мере увеличения крутящего момента от холостого хода до полной нагрузки.
Таким образом, крутящим моментом можно управлять, изменяя скорость. Контроль скорости достигается либо
- Изменение магнитного потока путем управления током через обмотку возбуждения — метод управления потоком. С помощью этого метода скорость регулируется выше номинальной.
- Контроль напряжения якоря — Обеспечивает контроль скорости ниже нормальной.
- Контроль напряжения питания — Обеспечивает контроль скорости в обоих направлениях.
Работа в 4 квадранте
Обычно двигатель может работать в 4 различных регионах. Четырехквадрантный режим работы двигателя постоянного тока включает в себя следующее.
- В качестве мотора, вращающегося вперед или по часовой стрелке.
- Как генератор в прямом направлении.
- Как двигатель в обратном направлении или против часовой стрелки.
- Как генератор в обратном направлении.
- В первом квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в положительном направлении.
- Во втором квадранте направление крутящего момента меняется на противоположное, и двигатель действует как генератор
- В третьем квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в отрицательном направлении.
- В квадранте 4 двигатель работает как генератор в реверсивном режиме.
- В первом и третьем квадранте двигатель работает как в прямом, так и в обратном направлении.Например, двигатели в кранах для подъема груза и его опускания.
Во втором и четвертом квадранте двигатель действует как генератор в прямом и обратном направлениях соответственно и возвращает энергию источнику питания. Таким образом, способ управления работой двигателя, чтобы заставить его работать в любом из 4-х квадрантов, заключается в управлении его скоростью и направлением вращения.
Скорость регулируется либо изменением напряжения якоря, либо ослаблением поля. Направление крутящего момента или направление вращения контролируется изменением степени, в которой приложенное напряжение больше или меньше обратной ЭДС.
Распространенные неисправности двигателей постоянного тока
Важно знать, а также понимать отказы и отказы двигателя, чтобы описать наиболее подходящие устройства безопасности для каждого случая. Есть три типа отказов двигателя: механические, электрические и механические, которые перерастают в электрические. К наиболее частым сбоям относятся следующие:
- Пробой изоляции
- Перегрев
- Перегрузки
- Отказ подшипника
- Вибрация
- Заблокированный ротор
- Несоосность вала
- Обратный ход
- Дисбаланс фаз
Наиболее распространенные неисправности, возникающие в двигателях переменного тока, а также в двигателях постоянного тока, включают следующие.
- Когда двигатель установлен неправильно
- Когда двигатель заблокирован из-за грязи
- Когда двигатель содержит воду
- При перегреве двигателя
Двигатель постоянного тока 12 В
Двигатель постоянного тока 12 В — недорогой, компактный и мощный, который используется в нескольких приложениях. Выбор подходящего двигателя постоянного тока для конкретного применения — сложная задача, поэтому очень важно работать с конкретной компанией. Лучшим примером этих двигателей является METMotors, поскольку они производят высококачественные двигатели PMDC (постоянный магнит постоянного тока) уже более 45 лет.
Как выбрать правильный мотор?
С помощью METmotors можно очень легко выбрать двигатель постоянного тока 12 В, потому что профессионалы этой компании сначала изучат ваше правильное применение, а затем рассмотрят многочисленные характеристики, а также спецификации, чтобы гарантировать, что вы получите наилучший продукт.
Рабочее напряжение — одна из характеристик этого двигателя.
Когда двигатель приводится в действие от батарей, обычно выбираются низкие рабочие напряжения, поскольку для получения определенного напряжения требуется меньшее количество ячеек.Но при высоких напряжениях двигатель постоянного тока обычно более эффективен. Несмотря на то, что его работа достижима при напряжении 1,5 В до 100 В. Наиболее часто используемые двигатели — 6v, 12v и 24v. Другими основными характеристиками этого двигателя являются скорость, рабочий ток, мощность и крутящий момент.
Двигатели постоянного тока на 12 В идеально подходят для различных применений с использованием источника постоянного тока, требующего рабочего крутящего момента, а также высокого пускового момента. Эти двигатели работают на меньших скоростях по сравнению с двигателями с другими напряжениями.
Характеристики этого двигателя в основном различаются в зависимости от компании-производителя, а также области применения.
- Скорость двигателя от 350 до 5000 об / мин
- Номинальный крутящий момент этого двигателя колеблется от 1,1 до 12,0 фунт-дюймов
- Выходная мощность этого мотора составляет от 01 до 21 л.с.
- Размеры рамы 60 мм, 80 мм, 108 мм
- Щетки сменные
- Типичный срок службы щетки 2000+ часов
Обратная ЭДС в двигателе постоянного тока
Когда токопроводящий проводник расположен в магнитном поле, крутящий момент будет индуцироваться по проводнику, и крутящий момент будет вращать проводник, который рассекает поток магнитного поля.Основываясь на явлении электромагнитной индукции, когда проводник разрезает магнитное поле, внутри проводника возникает ЭДС.
Направление наведенной ЭДС можно определить с помощью правила правой руки Флемминга. Согласно этому правилу, если мы сжимаем большой палец, указательный и центральный палец под углом 90 °, после этого указательный палец будет обозначать направление магнитного поля. Здесь большой палец представляет собой движение проводника, а средний палец обозначает ЭДС, наведенную на проводник.
Применяя правило правой руки Флемминга, мы можем заметить, что направление индуцированной ЭДС противоположно приложенному напряжению. Таким образом, ЭДС называется обратной или встречной ЭДС. Развитие обратной ЭДС может происходить последовательно за счет приложенного напряжения, но в обратном направлении, то есть обратная ЭДС сопротивляется протеканию тока, который ее вызывает.
Величину обратной ЭДС можно выразить с помощью аналогичного выражения, подобного следующему.
Eb = NP ϕZ / 60A
Где
«Eb» — это ЭДС двигателя, наведенная обратная ЭДС.
«А» — это нет.параллельных полос по всей арматуре среди щеток обратной полярности
«P» — это нет. полюсов
«N» — это скорость
‘Z’ — полное количество проводников внутри якоря
‘ϕ’ — полезный поток для каждого полюса.
В приведенной выше схеме величина обратной ЭДС всегда мала по сравнению с приложенным напряжением. Несоответствие между ними почти равнозначно, если двигатель постоянного тока работает в обычных условиях. Ток будет индуцироваться в двигателе постоянного тока из-за основного источника питания.Соотношение между основным питанием, противо-ЭДС и током якоря можно выразить как Eb = V — IaRa.
Приложение для управления работой двигателя постоянного тока в 4 квадрантах
Управление работой двигателя постоянного тока в 4-х квадрантах может быть достигнуто с помощью микроконтроллера, сопряженного с 7 переключателями.
4-квадрантное управлениеВариант 1: При нажатии переключателя пуска и по часовой стрелке логика микроконтроллера выдает низкий логический уровень на контакт 7 и высокий логический уровень на контакт 2, заставляя двигатель вращаться по часовой стрелке и работать в режиме 1. кв квадрант.Скорость двигателя можно изменять, нажимая переключатель PWM, вызывая приложение импульсов различной длительности к разрешающему выводу микросхемы драйвера, таким образом изменяя приложенное напряжение.
Случай 2: При нажатии переднего тормоза логика микроконтроллера применяет низкий логический уровень к выводу 7 и высокий логический уровень к выводу 2, и двигатель стремится работать в обратном направлении, вызывая его немедленную остановку.
Аналогичным образом нажатие переключателя против часовой стрелки заставляет двигатель двигаться в обратном направлении, т.е.е. работают в квадранте 3 rd , и нажатие переключателя тормоза заднего хода приводит к мгновенной остановке двигателя.
Таким образом, посредством правильного программирования микроконтроллера и переключателей можно управлять работой двигателя в каждом направлении.
Итак, это все о двигателе постоянного тока. Преимущества двигателя постоянного тока заключаются в том, что они обеспечивают превосходное управление скоростью для ускорения и замедления, простую для понимания конструкцию и простую и дешевую конструкцию привода.Вот вам вопрос, каковы недостатки двигателя постоянного тока?
Фото:
Типы двигателей постоянного тока— щеточные, бесщеточные и серводвигатели постоянного тока
Введение
Почти каждое механическое движение, которое мы видим сегодня, совершается с помощью электродвигателя. Электродвигатель потребляет электрическую энергию и производит механическую энергию. Электродвигатели бывают разных номиналов и размеров. Некоторые применения больших электродвигателей включают лифты, прокатные станы и электропоезда.Некоторые области применения малых электродвигателей — роботы, автомобили и электроинструменты. Электродвигатели делятся на два типа: двигатели постоянного тока и двигатели переменного тока. Функция двигателей переменного и постоянного тока одинакова, то есть преобразовывать электрическую энергию в механическую.
Основное различие между этими двумя состоит в источнике питания, который представляет собой источник переменного тока для двигателей переменного тока и источник постоянного тока, такой как батарея для двигателей постоянного тока. Электродвигатели переменного и постоянного тока состоят из статора, который является неподвижной частью, и ротора, который является вращающейся частью или якорем двигателя.Принцип работы электродвигателя основан на взаимодействии магнитного поля, создаваемого статором, и электрического тока, протекающего в роторе, для создания скорости вращения и крутящего момента.
Существуют разные типы двигателей постоянного тока, и все они работают по одному и тому же принципу. Двигатель постоянного тока — это электромеханический привод, используемый для непрерывного движения с регулируемой скоростью вращения. Двигатели постоянного тока идеально подходят для использования в приложениях, где требуется регулирование скорости, сервоуправление или позиционирование.
Ниже показан простой двигатель постоянного тока.
Ссылка на ресурс изображения: mind.ilstu.edu/curriculum/medical_robotics/dcmotor.jpg
Как упоминалось ранее, любой двигатель состоит из двух частей, а именно. статор и ротор. В зависимости от конфигурации и конструкции существует три типа двигателей постоянного тока: щеточный двигатель, бесщеточный двигатель и серводвигатель.
Принцип работы двигателя постоянного тока
Устройство электромеханического преобразования энергии принимает электрическую энергию на входе и производит механическую энергию на выходе.Для этой задачи широко используются три электрические машины: двигатель постоянного тока, асинхронный или асинхронный двигатель и синхронный двигатель. Асинхронный двигатель и синхронные двигатели — это двигатели переменного тока. Во всех двигателях электрическая энергия преобразуется в механическую при изменении магнитного потока, связывающего катушку.
Электродвигатель принимает электрическую энергию на входе и преобразует ее в механическую энергию.
ЭлектродвигательКогда электрическая энергия подается на проводник, расположенный перпендикулярно направлению магнитного поля, результатом взаимодействия между электрическим током, протекающим через проводник, и магнитным полем является сила.Эта сила толкает проводник в направлении, перпендикулярном как току, так и магнитному полю, следовательно, сила носит механический характер.
Значение силы можно рассчитать, если известны плотность магнитного поля B, длина проводника L и ток, протекающий в проводнике I.
Сила, действующая на проводник, определяется соотношением
.F = B × I × L Ньютон
Направление движения проводника можно определить с помощью правила левой руки Флеминга.
Правило левой руки Флеминга применимо ко всем электродвигателям.
Рисунок, представляющий Правило левой руки Флеминга, показан ниже.
Ссылка на изображение
: daido-electronics.co.jp/english/qa/magnet_lexicon/ha/images/ha12.gif
Когда проводник, по которому проходит ток, помещается в магнитное поле, на проводник действует сила, перпендикулярная направлениям магнитного поля и тока.
Согласно правилу Флеминга для левой руки, большой палец левой руки представляет направление силы, указательный палец представляет направление магнитного поля, а средний палец представляет направление тока.
Двигатель постоянного тока состоит из двух наборов катушек, называемых обмоткой якоря и обмоткой возбуждения. Обмотка возбуждения используется для создания магнитного поля. Для этого также можно использовать набор постоянных магнитов. Если используются обмотки возбуждения, это электромагнит. Обмотка возбуждения — это неподвижная часть двигателя или статора. Обмотка якоря является роторной частью двигателя. Ротор находится внутри статора. Ротор или якорь подключаются к внешней цепи через механический коммутатор.
Как правило, ферромагнитные материалы используются для изготовления статора и ротора, разделенных воздушным зазором. Обмотки катушек внутри статора состоят из последовательного или параллельного соединения нескольких катушек. Медные обмотки обычно используются как для обмоток якоря, так и для обмоток возбуждения.
Принцип работы двигателя постоянного тока объясняется ниже.
Принцип работы двигателя постоянного токаСсылка на ресурс изображения: ustudy.in/sites/default/files/images/dc%20motor.JPG
Рассмотрим катушку, помещенную в магнитное поле с магнитной индукцией В Тесла. Когда на катушку подается постоянный ток, подключенный к источнику постоянного тока, ток I течет по длине катушки. Электрический ток в катушке взаимодействует с магнитным полем, и в результате на катушку действует сила в соответствии с уравнением силы Лоренца. Сила пропорциональна силе магнитного поля и силы тока в проводнике.
Тот же принцип используется в двигателе постоянного тока, который состоит из нескольких катушек, намотанных на якорь, и все катушки испытывают одинаковую силу.Результатом этой силы является вращение якоря. Вращение проводника в магнитном поле приведет к возникновению крутящего момента. Магнитный поток, связанный с проводником, различается в разных положениях катушки в магнитном поле, и это вызывает индукцию ЭДС в катушке в соответствии с законами электромагнитной индукции Фарадея. Эта ЭДС называется обратной ЭДС. Направление этой ЭДС противоположно напряжению питания, которое отвечает за протекание тока в проводнике.Следовательно, общая величина тока, протекающего в якоре, пропорциональна разнице между напряжением питания и обратной ЭДС.
Электрический эквивалент двигателя постоянного тока показан ниже.
Эквивалентная схема двигателя постоянного токаЭлектрическая эквивалентная схема двигателя постоянного тока разделена на две цепи: цепь возбуждения и цепь якоря. Полевая цепь отвечает за магнитное поле и питается отдельным постоянным напряжением V f . Сопротивление и индуктивность обмотки возбуждения представлены R f и L f .В результате напряжения в обмотке возникает ток I f , который создает необходимое магнитное поле.
В якоре напряжение V T приложено к клеммам двигателя, а в цепи якоря протекает ток I a . Сопротивление обмотки якоря Ra, а полное напряжение, индуцированное в якоре, составляет E b .
Применение закона Кирхгофа для обеих цепей,
V f = I f * R f
V T = I a * R a + E b
Крутящий момент, развиваемый в двигателе, составляет
.T = K * I a * Φ
Где k — постоянная величина, зависящая от геометрии катушки, а Φ — магнитный поток.
Электрическая мощность двигателя E b * I a .
Развиваемая мощность, которая представляет собой мощность, преобразованную в механическую форму, приведена ниже:
P = T * ω n , где ω — угловая скорость.
Это полная мощность, которая передается наведенному напряжению якоря, а
E b * I a = T * ω n
Типы двигателей постоянного тока Двигатели постоянного тока
в основном делятся на два типа по способу питания ротора.Это щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока. Как видно из названия, щетки присутствуют в щеточном двигателе постоянного тока для подачи тока на вращающийся якорь через коммутатор, тогда как в бесщеточном двигателе постоянного тока нет необходимости в щетках, поскольку он использует ротор с постоянными магнитами.
Матовый двигатель постоянного тока
В двигателях этого типа магнитное поле создается пропусканием тока через коммутатор и щетку, которые находятся внутри ротора. Следовательно, они называются щеточными двигателями. Щетки изготовлены из угля.Это могут быть двигатели с независимым возбуждением или с самовозбуждением.
Статорная часть двигателя состоит из катушек, соединенных по кругу таким образом, что образуются требуемые альтернативные северный и южный полюса. Эта катушка может быть установлена последовательно или параллельно обмотке катушки ротора, образуя двигатели постоянного тока с последовательной обмоткой и двигатели постоянного тока с параллельной обмоткой. Якорь или роторная часть двигателя постоянного тока состоит из коммутатора, который представляет собой проводник с током, подключенный на одном конце к медным сегментам, которые электрически изолированы.Внешнее питание может быть подключено к коммутатору через щетки при вращении якоря.
Типы щеточных электродвигателей постоянного тока
Двигатели постоянного токаклассифицируются по электрическому соединению обмотки якоря и обмотки возбуждения. Из разных типов соединений возникают разные типы двигателей. Двигатели постоянного тока делятся на основе генерации магнитного поля. Существует три основных типа двигателей постоянного тока: с раздельным возбуждением, с самовозбуждением и с постоянным магнитом. В двигателях с постоянными магнитами используется мощный магнит для создания необходимого магнитного поля.В случае двигателей с независимым возбуждением и двигателей с самовозбуждением в конструкции статора размещен электромагнит.
Двигатели постоянного тока с самовозбуждением снова делятся на три типа: с параллельным возбуждением, с последовательным возбуждением и с смешанным возбуждением.
Типы двигателейс комбинированным возбуждением подразделяются на типы с кумулятивным смешанным возбуждением и дифференциальные двигатели с длинным шунтом и коротким шунтом в каждом из типов с комбинированным возбуждением.
Двигатели с автономным возбуждением
Как следует из названия, электродвигатель постоянного тока с независимым возбуждением использует отдельные источники питания для обмотки якоря и обмотки возбуждения.Это означает, что обмотка якоря и обмотка возбуждения электрически отделены друг от друга.
Двигатели с раздельным возбуждениемТок якоря и ток возбуждения не мешают друг другу, поскольку их источники различны. Но общая входная мощность — это сумма отдельных мощностей. Если V f и I f — это напряжение и ток, соответствующие цепи магнитного поля, а V t и I a — напряжение и ток, соответствующие цепи якоря, то общая входная мощность определяется как V f * I f + V t * I a .
Двигатели с самовозбуждением
В двигателях постоянного тока с самовозбуждением вместо отдельных источников напряжения обмотка возбуждения и обмотка якоря подключаются через единый источник питания. Это соединение может быть выполнено двумя способами: шунтирующим или параллельным и последовательным. Следовательно, самовозбуждающиеся двигатели снова подразделяются на двигатели постоянного тока с параллельной обмоткой и двигатели постоянного тока с последовательной обмоткой.
Шунтирующие двигатели постоянного тока : В случае параллельных двигателей постоянного тока обмотка возбуждения и обмотка якоря подключаются параллельно через одно и то же питание, и, следовательно, обмотки возбуждения подвергаются полному напряжению на клеммах.Несмотря на то, что питание одинаковое, ток возбуждения и ток якоря различаются. Скорость параллельного двигателя постоянного тока постоянна и не зависит от механической нагрузки на выходе.
Структура параллельного двигателя постоянного тока показана ниже.
Шунтирующий двигатель постоянного токаЭлектрический эквивалент параллельного двигателя постоянного тока показан ниже.
Шунтирующая эквивалентная цепь двигателя постоянного токаЕсли E b — это противоэдс двигателя, то
V t = E b + I a * R a
Если постоянная якоря Ka и скорость его вращения ω, то
E b = K a * ω * Φ
Где Φ — магнитный поток.
Следовательно,
V t = K a * ω * Φ + I a * R a
Суммарный ток равен I t = I f + I a
Следовательно, общая мощность P = V т * I т
Двигатели серии : В случае серийных двигателей постоянного тока обмотка возбуждения и обмотки якоря соединены последовательно с источником питания. Следовательно, в обмотке возбуждения и обмотки якоря протекает одинаковый ток.
Двигатель с последовательной обмоткой также называется универсальным двигателем, поскольку он работает от источника переменного или постоянного напряжения.
Двигатель с последовательной обмоткой всегда будет вращаться в одном направлении независимо от полярности источника напряжения. Это связано с тем, что при изменении полярности полярность обмотки якоря и направление магнитного поля меняются одновременно. Скорость серийного двигателя постоянного тока зависит от механической нагрузки.
Схематическое изображение двигателя постоянного тока с последовательным возбуждением показано ниже.
Двигатель постоянного тока серииЭлектрический эквивалент последовательного двигателя постоянного тока показан ниже.
Эквивалентная схема двигателя постоянного тока серииСоставные двигатели: В двигателях с комбинированной обмоткой используется комбинация как последовательных обмоток, так и шунтирующих обмоток возбуждения. Последовательная обмотка включена последовательно с якорем двигателя, а параллельная обмотка включена параллельно.
Поскольку существует две цепи возбуждения, которые создают магнитные поля, составные двигатели постоянного тока можно разделить на два типа в зависимости от ориентации магнитного потока.Это кумулятивные составные двигатели постоянного тока и дифференциальные составные двигатели постоянного тока.
Если поток шунтирующего поля способствует потоку последовательного поля, т. Е. Оба находятся в одном направлении, то это совокупный составной двигатель постоянного тока. В этом случае полный магнитный поток складывается из отдельных потоков.
Φ ВСЕГО = Φ СЕРИЯ + Φ КОЛОДКА
Структура совокупности составных двигателей постоянного тока представлена на следующем рисунке.
Суммарная составная цепь электродвигателя постоянного токаЭлектрический эквивалент показан ниже.
Эквивалентная схема кумулятивного составного двигателя постоянного токаВ случае дифференциальных составных двигателей постоянного тока поток, создаваемый последовательным полем и шунтирующим полем, имеет противоположное направление, а общий поток представляет собой разницу между ними.
Φ ВСЕГО = Φ СЕРИЯ — Φ КОЛОДКА
В этом случае чистый магнитный поток меньше исходного, и, следовательно, дифференциальные составные двигатели постоянного тока не находят многих практических применений.
Как накопительные, так и дифференциальные составные двигатели постоянного тока можно разделить на устройства с длинным шунтом и устройства с коротким шунтом на основе шунтирования обмотки возбуждения шунта.
В случае длинных параллельных двигателей обмотка возбуждения параллельна якорю и последовательной обмотке возбуждения.
Длинный шунтЕсли обмотка возбуждения параллельна только якорю, то это короткий шунт.
Короткий шунтДвигатели постоянного тока с постоянными магнитами: В двигателях постоянного тока с постоянными магнитами для создания магнитного поля используется мощный магнит. Следовательно, двигатель постоянного тока с постоянными магнитами состоит только из обмотки якоря.
Щеточный двигатель постоянного тока с постоянными магнитами показан ниже.
Ссылка на ресурс изображения: hades.mech.northwestern.edu/images/thumb/c/cf/Motor_Commutators.jpg/400px-Motor_Commutators.jpg
Щеточные двигатели постоянного тока с постоянными магнитами меньше и дешевле двигателей постоянного тока с обмоткой статора. Обычно редкоземельные магниты, такие как самарий-кобальт или неодим-железо-бор, используются в качестве магнитов в двигателях постоянного тока с постоянными магнитами, поскольку они являются очень мощными магнитами и имеют сильные магнитные поля.
Характеристики скорости / момента двигателя постоянного тока с постоянными магнитами более линейны, чем у двигателей постоянного тока с обмоткой статора.
Недостатком щеточного двигателя постоянного тока является возникновение искр между коллектором и щетками в условиях большой нагрузки. Это выделяет большое количество тепла и сокращает срок службы двигателя.
Бесщеточный двигатель постоянного тока
Бесщеточные двигатели постоянного тока обычно состоят из ротора с постоянным магнитом и статора с обмоткой. Эта конструкция за счет использования постоянных магнитов в роторе устраняет необходимость в щетках в роторной части. Следовательно, в отличие от щеточных двигателей постоянного тока, этот тип не содержит щеток и, следовательно, не изнашивается щетками, так как выделяется небольшое количество тепла.
Ссылка на изображение
: zeva.com.au/Tech/Motors/BLDC.gif
Поскольку в двигателе нет щеток, должны быть другие средства для определения углового положения ротора. Датчики на эффекте Холла используются для создания сигналов обратной связи, необходимых для управления любыми полупроводниковыми переключающими устройствами. Бесщеточные двигатели постоянного тока дороже щеточных двигателей постоянного тока и более эффективны, чем их щеточные собратья.
Серводвигатель постоянного тока
Маленький двигатель постоянного тока будет вращаться с высокой скоростью, но его крутящий момент недостаточен для перемещения любой нагрузки.Серводвигатель постоянного тока состоит из четырех частей: обычного двигателя постоянного тока, коробки передач для управления скоростью, цепи управления и блока определения положения. Коробка передач принимает входную скорость и переходит на более медленную, но более практичную скорость. Блок определения положения обычно представляет собой потенциометр. Схема управления представляет собой усилитель детектора ошибок.
В серводвигателях постоянного тока положение вала является обратной связью со схемой управления, и поэтому они используются в приложениях с обратной связью.
Потенциометр подсоединен к валу.Это позволяет цепи управления отслеживать положение двигателя. Это положение сравнивается схемой управления с опорным входным сигналом. Выход схемы управления — это обратная связь с двигателем. Если есть какое-либо несоответствие между текущим положением и референтным положением, на выходе усилителя обнаружения ошибок генерируется сигнал ошибки. По этому сигналу вал поворачивается, перемещается в нужное место и останавливается.
Большинство серводвигателей постоянного тока могут вращаться на 180 0 в любом направлении.Серводвигатели постоянного тока используются в устройствах с дистанционным управлением, робототехнике и даже в крупных промышленных приложениях.
Ссылка на изображение
: e lectrical4u.com/electrical/wp-content/uploads/2013/07/servo-motor-3.png
Привод двигателя постоянного тока
Двигатель постоянного тока можно включать и выключать с помощью транзисторов, переключателей или реле. Простейшей формой управления двигателем является линейное управление, в котором используется биполярный переходной транзистор, действующий как переключатель.Назначение цепей возбуждения — контролировать ток в обмотках. Скорость двигателя можно контролировать, изменяя величину базового тока транзистора. Если транзистор находится в активном состоянии, двигатель вращается с половинной скоростью, поскольку только половина напряжения питания поступает на двигатель. Двигатель вращается с максимальной скоростью, когда на него подается все напряжение питания. Это происходит, когда транзистор находится в состоянии насыщения.
Следующая схема используется для вращения двигателя в одном направлении.
Цепь управления однонаправленным двигателемВ приведенной выше схеме очень важны резисторы R b и R 1 . Резистор R b используется для защиты цепи управления от скачков тока. Резистор R 1 обеспечивает выключение транзистора, когда входной вывод находится в тройном состоянии.
Скорость двигателя можно регулировать путем модуляции напряжения питания, поскольку скорость пропорциональна среднему значению питания.
Импульсное питаниеПроцент времени включения называется рабочим циклом. Рабочий цикл для указанного выше импульса задается как β = a / (a + b).
Изменяя рабочий цикл, т.е. изменяя ширину импульса, можно изменять скорость вращения двигателя. Это называется методом ШИМ (широтно-импульсной модуляции). Скорость также можно изменять без изменения ширины импульса. Это достигается изменением частоты импульса. Это называется ЧИМ (частотно-импульсная модуляция).
Изменение направления двигателя постоянного тока: Недостатком вышеупомянутой схемы управления является то, что она является однонаправленной, т.е. двигатель всегда вращается в одном направлении. Чтобы изменить направление вращения двигателя, необходимо поменять полярность питания. Для этого можно использовать разные переключатели.
Первое подключение использует переключатель DPDT (двухполюсный, двухпозиционный).
Подключение показано ниже.
Переключатель DPDTКогда переключатель находится в положении A, двигатель вращается в прямом направлении.Когда клеммы двигателя подключены к переключателю в положении B, направление меняется на противоположное.
Второе соединение использует четыре переключателя SPST (Single Post, Single Throw).
Коммутатор SPSTКомбинируя разные переключатели, можно получить разные функциональные возможности.
Комбинации и соответствующие операции следующие.
A + D — прямое направление
B + C — обратное направление
A + B — остановка и тормоз
C + D — остановка и тормоз
Все ВЫКЛ — Остановлено
H — Драйвер мотора моста
Чтобы добиться лучшего двунаправленного управления двигателем постоянного тока, требуется схема, называемая H-мостом.Название H-мост дано из-за его схематического вида по отношению к положению двигателя на центральной планке. Эта схема может использоваться для перемещения тока в любом направлении через обмотки двигателя.
Схема драйвера двигателя постоянного тока с Н-мостом показана ниже.
H Схема управления мостомУправляющий сигнал CNTRL 1, CNTRL 2, CNTRL 3 и CNTRL 4 используется для включения и выключения транзисторов Q1, Q2, Q3 и Q4 соответственно.
Операция не требует пояснений.Одно важное соображение, которое необходимо принять во внимание, заключается в том, что все полевые транзисторы должны быть в выключенном состоянии, когда входы непредсказуемы, чтобы транзисторы на каждой половине H-моста не включались одновременно. Следовательно, для каждого транзистора используется понижающий резистор.
Другая схема для реализации H-Bridge показана ниже.
L293D Драйвер двигателя IC
L293D IC — это микросхема драйвера двигателя, которая работает по концепции H-моста.Эта ИС позволяет двигателю двигаться в обоих направлениях. L293D IC — это 16-контактное устройство с двумя наборами входов и выходов. Следовательно, можно управлять двумя двигателями постоянного тока с помощью одной ИС.
Схема выводов микросхемы L293D приведена ниже.
Контакты 2, 7 и 10, 15 — это управляющие сигналы, которые используются для управления вращением двигателей.
Для двигателя 1,
Контакт 2 = логическая 1 и контакт 7 = логический 0 — прямое направление
Контакт 2 = логический 0 и контакт 7 = логическая 1 — обратное направление
Для других комбинаций вращения нет.
Аналогично двигателю 2,
Контакт 10 = логическая 1 и контакт 15 = логический 0 — прямое направление
Контакт 10 = логический 0 и контакт 15 = логическая 1 — обратное направление.
Схема управления двумя двигателями с использованием ИС драйвера двигателя L293D показана ниже.
Источник напряжения VCC1 используется для внутренних операций, то есть для активации сигналов, включения или отключения. Для привода двигателя используется питание VCC2. Обычно VCC1 = 5 В и VCC2 = 9 или 12 В.
ДАЛЕЕ — ДАТЧИКИ ЗВУКА
Принцип работы двигателя постоянного тока— StudiousGuy
В нашей повседневной жизни мы сталкиваемся с множеством электрических устройств с батарейным питанием, которые преобразуют электрическую энергию в механическую, например фены, игрушечные транспортные средства, крошечные вентиляторы, триммеры и т. Д.Электрический компонент, ответственный за это действие, — это двигатель постоянного тока, присутствующий внутри этих устройств. Двигатель постоянного тока — это устройство, которое работает на постоянном токе и преобразует его в механическую работу. Официальная заслуга в изобретении двигателя постоянного тока принадлежит американскому кузнецу Томасу Дэвенпорту; однако несколько других ученых, в том числе Уильям Стерджен и Фрэнк Джулиан Спраг, также внесли свой вклад в разработку двигателя постоянного тока. Сегодня двигатели постоянного тока стали неотъемлемой частью промышленного сектора и используются в различных приложениях, таких как двигатели электромобилей, лифты, краны и приводы сталепрокатных станов.Чтобы понять, как работает двигатель постоянного тока, давайте сначала рассмотрим компоненты, используемые в его конструкции.
Указатель статей (Нажмите, чтобы перейти)
Компоненты двигателя постоянного тока
Двигатель постоянного тока обычно выглядит как цилиндрическое устройство с выходящим из него валом, который вращается при приложении постоянного тока. Это действие выполняется путем расположения следующих компонентов определенным образом.
Статор
Статор или стальное ярмо представляет собой цилиндрический металлический кожух, внутри которого размещены все остальные элементы двигателя постоянного тока.Одна сторона статора содержит выходящий из нее вертикальный вал, а другая сторона имеет два вывода, к которым подключен источник постоянного тока.
Магниты
Внутри статора двигателя постоянного тока установлены два стационарных постоянных магнита. Они действуют как северный и южный полюса магнита, создавая поперек них горизонтальное магнитное поле.
Арматура
В электротехнике термин якорь относится к конструкции вращающихся катушек под действием электромагнитной силы.В двигателе постоянного тока якорь состоит из ротора, расположенного между двумя магнитами. Ротор представляет собой структуру из многослойных дисков, обернутых катушкой проводящего поля. Вал, выходящий из двигателя, проходит вдоль оси якоря и вращается вместе с ней.
Полевая катушка
Катушка возбуждения или обмотка возбуждения в двигателе постоянного тока представляет собой катушку из медных проводов, которая заменяет постоянные магниты, прикрепленные к внутренним стенкам статора. Когда через эту катушку проходит постоянный ток от батареи, он образует электромагнит, полярность которого можно контролировать, создавая желаемое магнитное поле.
Коммутатор
Коммутатор — это полая цилиндрическая деталь, сегментированная во многих местах для изменения полярности электромагнитной катушки якоря внутри двигателя постоянного тока. Это важная часть двигателя для работы от источника постоянного тока. Он находится на конце якоря вокруг вала. Концы катушки якоря подключены к коммутатору, а все остальные части, кроме щеток, электрически изолированы от него.
Кисти
Щетки в двигателе постоянного тока — это компоненты, которые соединяют статические клеммы с вращающимися частями двигателя.Обычно они изготавливаются из угольного графита, поскольку он отлично проводит электричество и обладает отличными смазочными свойствами. Коммутатор расположен между двумя щетками, которые дополнительно подключены к клеммам двигателя, замыкая цепь с источником питания постоянного тока.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока работает по принципу, что всякий раз, когда проводник с током помещается в магнитное поле, он испытывает магнитную силу, направление которой задается правилом левой руки Флеминга.Другими словами, двигатель постоянного тока вращается из-за взаимодействия магнитного поля постоянного магнита с магнитным полем электромагнита с током.
Правило левой руки Флеминга
Правило левой руки Флеминга — это мнемонический инструмент для понимания взаимно перпендикулярных отношений между током, приложенным магнитным полем и индуцированной силой в электродвигателе. Если мы вытянем указательный, средний и большой пальцы левой руки во взаимно перпендикулярных направлениях, совместив средний палец с условным направлением тока внутри тока, а указательный палец — с приложенным магнитным полем, тогда большой палец даст направление силы, испытываемой проводником.Чтобы понять, как это работает внутри двигателя постоянного тока, давайте обсудим работу двигателя постоянного тока более подробно.
Работа двигателя постоянного тока
Чтобы понять, как работает двигатель постоянного тока, давайте сначала рассмотрим более простой случай, когда одна прямоугольная проволочная петля размещена внутри северного и южного полюсов постоянного магнита. Когда ток протекает через проволочную петлю, он создает вокруг нее магнитное поле, которое взаимодействует с ранее существовавшим магнитным полем постоянных магнитов, в результате чего возникает сила отталкивания, направление которой можно определить с помощью правила левой руки Флеминга.Направление тока для сегмента провода около северного полюса постоянного магнита — вперед (идущий от положительного полюса батареи), что приводит к тому, что сила направляется вниз. Точно так же для участка провода около южного полюса постоянного магнита ток течет назад (к отрицательному выводу батареи), в результате чего сила направляется вверх. Два противоположных направления сил развивают крутящий момент в катушке, заставляя ее вращаться вокруг оси.
Тем не менее, одиночная петля из проволоки не обладает достаточной магнитной силой, чтобы преодолевать магнитный поток постоянных магнитов, и в конечном итоге остановится, образуя равновесие.Напряженность магнитного поля электромагнита усиливается за счет наматывания его на лопасти ротора. В двигателе постоянного тока ток входит в катушку через коммутатор, который трется об одну из щеток, подключенных к источнику постоянного тока. Когда ток проходит через катушку, ротор начинает вращаться в результате действующего на него крутящего момента. Сегментация коммутатора позволяет якорю избегать положения равновесия, отключая некоторые катушки от источника питания и обеспечивая однонаправленный крутящий момент.Этот цикл периодически повторяется, что приводит к вращению вала, прикрепленного к якорю.
Типы двигателей постоянного тока
Двигатели постоянного тока (DC) повсеместно используются в сегодняшнем промышленном секторе и служат для различных автомобильных приложений малого и среднего размера, от робототехники до транспорта. Из-за их универсальной функциональности на рынке доступно несколько типов двигателей постоянного тока, которые можно разделить на следующие категории в зависимости от их подключения:
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянными магнитами является типичным примером двигателя постоянного тока, в котором постоянные магниты создают поперечное магнитное поле внутри статора.Пара (или пары) радиально намагниченных постоянных магнитов прикреплены к внутренним стенкам статора, причем северный и южный полюса поочередно обращены друг к другу и создают однородное магнитное поле между ними. Цилиндрическая форма стального статора не только удерживает постоянные магниты, но и служит обратным каналом с низким сопротивлением для магнитного потока. Недостатком этих типов двигателей постоянного тока является то, что постоянные магниты могут со временем терять свои магнитные свойства; однако в некоторых усовершенствованных двигателях постоянного тока с постоянными магнитами магниты работают вместе с дополнительными катушками возбуждения, чтобы компенсировать потерю намагниченности.
Приложения
Двигатели постоянного тока с постоянными магнитами обычно используются в тех электрических устройствах, которые не потребляют много энергии и не требуют очень эффективного управления скоростью двигателя. Немногочисленные примеры таких электрических устройств — игрушечные машинки, дворники, нагнетатели горячего воздуха, приводы компакт-дисков и т. Д.
Двигатель постоянного тока с отдельным возбуждением
Возбужденный двигатель постоянного тока содержит катушку электромагнитного поля вместо постоянных магнитов для создания магнитного поля внутри статора.Эти двигатели имеют устройство возбуждения поля, установленное внутри двигателя, которое генерирует магнитное поле с помощью электрического тока. В двигателе постоянного тока с независимым возбуждением схема, обеспечивающая ток для возбуждения возбуждения, имеет источник напряжения, отличный от того, который подает ток на катушки якоря. Другими словами, ток, протекающий через катушки якоря, не течет через катушки устройств возбуждения поля. Устройство возбуждения поля работает с постоянным напряжением, тогда как катушки якоря могут иметь переменное напряжение для регулирования скорости двигателя.Кроме того, переключением полярности катушек возбуждения можно мгновенно изменить направление вращения вала двигателя. Тем не менее, недостатком является стоимость дополнительного источника напряжения, необходимого для возбуждения катушки возбуждения.
Приложения
Двигатели постоянного тока с раздельным возбуждением обычно встречаются в электроприборах, требующих вращения в обоих направлениях с точным контролем скорости. Они используются в различных устройствах, включая бумагоделательные машины, электрические силовые установки и даже контроллеры тяги в электропоездах.
Двигатели постоянного тока с самовозбуждением
Как следует из названия, электродвигатели постоянного тока с самовозбуждением имеют общий источник напряжения для катушек возбуждения и катушек якоря. Обе катушки могут быть подключены либо последовательно, либо параллельно, либо в некоторой комбинации последовательно-параллельной конфигурации. В зависимости от конфигурации подключения, двигатели постоянного тока с самовозбуждением подразделяются на следующие три категории:
Самовозбуждающийся двигатель постоянного тока с последовательной обмоткой
В двигателе постоянного тока с последовательным возбуждением катушка возбуждения внутри последовательно соединена с катушкой якоря.Хотя конструкция электродвигателя постоянного тока с последовательным возбуждением и самовозбуждением аналогична структуре других электродвигателей постоянного тока с возбуждением, катушка возбуждения самовозбуждающегося электродвигателя постоянного тока содержит относительно меньше витков и имеет более толстый провод, чем катушка якоря, что обеспечивает низкое электрическое сопротивление. В результате, создаваемый в этом случае электромагнитный момент намного выше, чем обычно, что приводит к более высокой скорости двигателя. Тем не менее, регулировка скорости в двигателях с самовозбуждением с последовательной обмоткой не так впечатляет, как в других двигателях с возбуждением.
Приложения
Из-за высокой скорости вращения самовозбуждающиеся двигатели с последовательной обмоткой обычно используются в качестве стартеров для тяжелых промышленных устройств, таких как краны и лифты.Кроме того, серийные двигатели часто используются только в течение короткого промежутка времени, например, нескольких секунд, потому что большой последовательный ток может сжечь катушки последовательного возбуждения, сделав двигатель бесполезным.
Двигатели постоянного тока с параллельным возбуждением и самовозбуждением
В двигателе постоянного тока с шунтовой обмоткой и самовозбуждении катушка возбуждения подключена параллельно катушке якоря двигателя, что приводит к одинаковому напряжению, но разной величине и потоку тока для обеих катушек. По сравнению с обмоткой якоря двигателя постоянного тока обмотка возбуждения имеет значительно большее количество витков, чтобы увеличить полезную магнитную связь, и проводник меньшего диаметра для увеличения сопротивления (меньший ток).Это дает самовозбуждающемуся двигателю постоянного тока с шунтовой обмоткой уникальную способность саморегулировать свою скорость при приложении нагрузки к валу клемм ротора. Другими словами, когда двигатель переключается с холостого хода на нагруженный, скорость двигателя существенно не колеблется.
Приложения
Двигатели постоянного тока с шунтовой обмоткой и самовозбуждением обычно встречаются в устройствах, которые работают с постоянной скоростью. Их способность к саморегулированию скорости пригодится там, где требуется точное управление скоростью, например.g., шлифовальные станки, печатные машины, токарные станки и т. д. Тем не менее, нагрузка во время запуска двигателя должна быть ограничена, так как он не может обеспечить высокий пусковой крутящий момент.
Самовозбуждающиеся электродвигатели постоянного тока с комбинированной обмоткой
Самовозбуждающийся двигатель постоянного тока с составной обмоткой, также известный как составной двигатель постоянного тока, представляет собой комбинацию как последовательных, так и параллельных двигателей. В составных двигателях постоянного тока катушки возбуждения подключены к катушкам якоря как последовательно, так и параллельно.Цель такой структурной комбинации — получить лучшие качества обоих типов. Параллельный двигатель имеет очень эффективное регулирование скорости, тогда как последовательный двигатель имеет очень высокий начальный крутящий момент. В результате составной двигатель постоянного тока является фантастическим компромиссом с точки зрения этих характеристик. Обе катушки возбуждения работают вместе, чтобы обеспечить требуемый магнитный поток и желаемую скорость вращения. Основываясь на соединениях катушки возбуждения с катушкой якоря, электродвигатели постоянного тока с комбинированной обмоткой можно разделить на два основных типа:
- Длинные шунтирующие двигатели постоянного тока с составной обмоткой — это двигатели, в которых катушка возбуждения с параллельной обмоткой соединена параллельно через последовательную комбинацию якоря и катушки возбуждения.
- Короткие шунтирующие электродвигатели постоянного тока с составной обмоткой — это такие двигатели, в которых ток сначала проходит через последовательно включенную обмотку возбуждения, а затем разделяется на параллельное соединение обмотки возбуждения с параллельной обмоткой и обмотки якоря.
Кроме того, составные двигатели постоянного тока также можно разделить на две другие категории в зависимости от возбуждения и характеристик компаундирования:
- Суммарное смешение: В двигателе постоянного тока с кумулятивным составом поток шунтирующего поля, создаваемый катушкой шунтирующего поля, усиливает эффект потока основного поля, создаваемого катушкой последовательного поля.Другими словами, поток, создаваемый обмоткой шунтирующей катушки, складывается с потоком, создаваемым последовательной обмоткой катушки, чтобы получить общий поток.
- Дифференциальное соединение: Говорят, что двигатель имеет дифференциальное соединение, если поток шунтирующего поля снижает влияние основной последовательной обмотки. Это происходит из-за противоположной полярности катушки возбуждения с шунтирующей обмоткой и катушки с последовательной обмоткой. Поскольку чистый поток, созданный в этом случае, ниже, чем исходный поток, эта конфигурация вряд ли будет иметь какое-либо практическое применение.
Приложения
Подобно электродвигателям постоянного тока с шунтовой обмоткой и самовозбуждением, составной электродвигатель постоянного тока также часто используется в устройствах, требующих работы с быстрой и постоянной скоростью. Основное различие в их полезности состоит в том, что составные двигатели постоянного тока могут работать независимо от нагрузки, приложенной к валу. Другими словами, в случае составных двигателей постоянного тока нагрузка не вызывает особого беспокойства. Обычные применения электродвигателей постоянного тока с составной обмоткой можно увидеть в таких машинах, как эскалаторы, лифты, штамповочные прессы, прокатные станы, поршневые машины и т. Д.
Двигатели переменного тока и двигатели постоянного тока
Между двигателями переменного тока и двигателями постоянного тока есть несколько ключевых различий, помимо очевидного, которое связано с тем, как каждый из этих компонентов получает питание. Ниже приводится краткое описание каждого из этих типов двигателей с кратким описанием различий между ними.
Чтобы узнать больше о различных типах двигателей, обратитесь к нашему руководству по покупке двигателей.
Что такое двигатели переменного тока?
Двигатели переменного тока— это электромеханические устройства, преобразующие электрическую энергию в виде переменного напряжения и тока в механическую энергию.Асинхронные двигатели бывают разных типов, которые можно охарактеризовать как асинхронные двигатели (асинхронные) или синхронные двигатели, которые содержат статор и ротор. Асинхронные двигатели могут быть однофазными или многофазными, в то время как синхронные двигатели включают электродвигатели с сопротивлением и электродвигатели с гистерезисом. См. Соответствующее руководство «Типы двигателей переменного тока», чтобы узнать больше о каждом из них.
Что такое двигатели постоянного тока?
Двигатели постоянного тока могут преобразовывать электрическую энергию, подаваемую на них в виде постоянного тока, в механическую энергию вращения.То же устройство можно использовать в обратном направлении для выработки электроэнергии постоянного тока от вращения вала двигателя. При таком использовании устройство работает как генератор. Доступны несколько основных типов двигателей постоянного тока. К ним относятся двигатели постоянного тока с постоянным магнитом, двигатели постоянного тока с последовательной обмоткой, шунтирующие двигатели постоянного тока, комбинированные двигатели постоянного тока и бесщеточные двигатели постоянного тока. В нашем соответствующем руководстве «Типы двигателей постоянного тока» содержится дополнительная информация о каждом из этих типов.
Чем электродвигатели переменного и постоянного тока отличаются друг от друга?
Хотя двигатели переменного и постоянного тока вырабатывают механическую энергию в виде вращающегося вала двигателя, между ними есть несколько ключевых отличий:
Входная мощность
Двигатели переменного токаработают от входного электрического сигнала, представляющего собой переменный ток и напряжение, которые меняются по амплитуде и направлению по мере завершения цикла входной формы волны переменного тока.Двигатели переменного тока могут работать как от однофазного источника питания, так и от многофазного источника с несколькими входами напряжения, которые работают с разностью фаз друг от друга (обычно 120 o или 2π / 3 радиан в случае трехфазного власть). Двигатели постоянного тока питаются от однонаправленного тока (который не меняет направление со временем), подаваемого от источника постоянного тока. Общая значимость мощности переменного тока означает, что может возникнуть необходимость в преобразовании в мощность постоянного тока при использовании двигателя постоянного тока, например при использовании преобразователя переменного тока в постоянный или источника питания постоянного тока.
Магнитное поле
В многофазных двигателях переменного тока, поскольку катушки статора питаются переменным током, создается вращающееся магнитное поле, или RMF, которое, согласно закону индукции Фарадея, генерирует ЭДС в катушках ротора. Эта ЭДС приводит к возникновению тока в роторе и приложенного чистого крутящего момента, заставляющего его вращаться, а также генерирующего вращающееся магнитное поле. Асинхронные двигатели проявляют явление, известное как скольжение, при котором скорость ротора (N r ) меньше синхронной скорости вращающегося поля статора (N s ).Сдвиг математически выражается как:
В двигателе постоянного тока постоянный магнит или набор катушек возбуждения создают магнитное поле, которое не вращается. На катушки якоря подается ток, в результате чего якорь вращается.
Конструкция с прямым и косвенным подключением
В двигателе переменного тока подача питания на катушки статора через прямое подключение к многофазному источнику питания переменного тока — это все, что необходимо для вращения ротора.Принцип электромагнитной индукции генерирует ток в роторе без необходимости прямого электрического подключения.
Для двигателя постоянного тока ток должен подаваться как на катушки постоянного возбуждения (если не используется постоянный магнит), так и на якорь. Для этого в щеточных двигателях постоянного тока используется набор подпружиненных угольных щеток, которые прижимаются к кольцу коммутатора, которое передает ток на катушки якоря и катушки возбуждения при вращении якоря.В зависимости от того, выполняется ли соединение катушки возбуждения параллельно с катушкой якоря (параллельный двигатель) или последовательно с катушкой якоря (двигатель с последовательной обмоткой), результирующая конфигурация двигателя постоянного тока будет иметь разные рабочие характеристики.
Использование щеток и коммутатора оказывает несколько влияний на работу двигателей постоянного тока:
- Щетки подвержены износу из-за механического трения, а это означает, что ремонт и замена щеток неизбежны, что влияет на размещение двигателя из-за необходимости доступа.
- Контакт щетки с коммутатором может вызвать искры и дугу, которые могут вызвать точечную коррозию и повреждение коммутатора, а также могут быть источником воспламенения — проблема в некоторых средах, где существует риск воздействия легковоспламеняющихся паров или газов.
- Трение щетки является причиной снижения эффективности двигателей постоянного тока, которые их используют, поскольку часть входящей энергии расходуется на трение и не используется для создания движения.
- Щеточные двигатели постоянного тока создают больше шума и образуют пыль из-за износа щетки, которая обычно представляет собой углерод или графит.
Контроль скорости
В двигателе переменного тока скорость двигателя регулируется входной частотой переменного тока, подаваемого на катушки статора, и прямо пропорциональна. По мере увеличения частоты увеличивается скорость двигателя. Контроллеры частотно-регулируемого привода используются для регулировки входной частоты по желанию для достижения желаемой скорости вращения двигателя.
Для двигателей постоянного тока скорость устройства регулируется путем изменения напряжения и тока, которые прикладываются к катушкам или обмоткам якоря, или путем регулировки тока, протекающего в катушках возбуждения (следовательно, влияя на силу магнитного поля для катушка возбуждения).Соотношение скорости и тока снова пропорционально.
Механизм запуска
Многофазные двигатели переменного тока считаются самозапускающимися и не требуют дополнительной электроники, кроме частотно-регулируемого управления скоростью. Как однофазные двигатели переменного тока, так и двигатели постоянного тока требуют пускового механизма для управления условиями пуска. Например, в больших двигателях постоянного тока обратная ЭДС, генерируемая в якоре, пропорциональна скорости якоря и поэтому мала при запуске.Это состояние может вызвать сильный ток через якорь, потенциально вызывающий выгорание. Таким образом, для этих двигателей необходимо контролировать нарастание входного напряжения при запуске.
Производительность
Двигатели переменного токачасто используются из-за их высокоскоростного и переменного крутящего момента, но обычно крутящий момент будет падать с увеличением скорости двигателя. Двигатели постоянного тока могут обеспечивать высокий крутящий момент и полезны там, где требуется регулирование скорости. Двигатели постоянного тока могут обеспечивать более постоянный крутящий момент во всем диапазоне скоростей и, как правило, обеспечивать более быструю реакцию на изменения нагрузки, чем двигатели переменного тока.В зависимости от конфигурации соединения катушек (последовательное или параллельное) для двигателей постоянного тока могут быть получены разные характеристики в зависимости от значения нагрузки. Серийные двигатели демонстрируют более высокий пусковой момент, но имеют более резкое падение скорости при увеличении нагрузки. Параллельные или параллельные двигатели постоянного тока обеспечивают более низкий пусковой момент, но имеют более плоское соотношение скорости и нагрузки и, следовательно, могут обеспечивать постоянную скорость почти независимо от приложенной нагрузки.
Двигатели переменного токастрадают от проблем с эффективностью из-за потерь индукционного тока и скольжения, упомянутых ранее.Двигатели постоянного тока, в которых используются постоянные магниты, могут быть примерно на 30% эффективнее, поскольку им не нужно потреблять энергию для создания электромагнита, но есть некоторая потеря эффективности из-за потерь энергии из-за трения щеток. Бесщеточные двигатели постоянного тока более эффективны, чем двигатели со щетками, но выигрыш в эффективности достигается в основном на участках кривой производительности двигателя с низкой или нулевой нагрузкой.
Другие соображения
Для заданного количества механической работы двигатели переменного тока обычно больше, чем двигатели постоянного тока, а бесщеточные конструкции постоянного тока являются наименьшими.Двигатели переменного тока имеют длительный срок службы, в то время как двигатели постоянного тока требуют большего обслуживания для тех конструкций, в которых используются щетки и коммутаторы, которые имеют механический износ. Двигатели с электронной коммутацией (ЕСМ) представляют собой бесщеточные двигатели постоянного тока, которые исключают механическую коммутацию и использование щеток в пользу электронной коммутации и управления, тем самым увеличивая срок службы, снижая энергопотребление, обеспечивая охлаждение и улучшая производительность.
Сводка
В этой статье представлено краткое обсуждение разницы между двигателями переменного и постоянного тока.Для получения информации о других продуктах обратитесь к нашим дополнительным руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http://www.ohioelectricmotors.com/2015/07/what-is-the-difference-between-an-ac-motor-and-a-dc-motor/
- https://www.precision-elec.com/difference-between-ac-and-dc-motors/
- https://www.powerelectric.com/motor-resources/motors101/ac-motors-vs-dc-motors
- https: // физикаоб.com / двигатель переменного тока и двигатель постоянного тока /
- https://www.orientalmotor.com/brushless-dc-motors-gear-motors/technology/AC-brushless-brasted-motors.html
- https://www.machinedesign.com/motion-control/what-s-difference-between-ac-dc-and-ec-motors
- http://electricalacademia.com/electrical-comparisons/difference-between-ac-motor-and-dc-motor/
- https://www.veichi.org/solutions/related-articles/what-is-the-difference-between-ac-and-dc-motors.html
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Принцип работы или принцип действия двигателя постоянного тока
Двигатель постоянного тока имеет жизненно важное значение для промышленности сегодня и не менее важен для инженеров, чтобы детально изучить принцип работы двигателя постоянного тока , который мы обсуждали в этой статье.Чтобы понять принцип действия двигателя постоянного тока , нам нужно сначала взглянуть на его конструктивную особенность с одним контуром.
Самая простая конструкция двигателя постоянного тока содержит токоведущий якорь, соединенный с концом питания через сегменты коммутатора и щетки. Якорь помещается между северным и южным полюсами постоянного или электромагнита, как показано на схеме выше.
Как только мы подаем в якорь постоянный ток, на него действует механическая сила из-за электромагнитного воздействия магнита на проводники якоря.Теперь, чтобы углубиться в детали принципа действия двигателя постоянного тока , важно, чтобы мы четко понимали правило левой руки Флеминга для определения направления силы, действующей на проводники якоря двигателя постоянного тока.
Если проводник с током помещен в магнитное поле перпендикулярно, то на проводник действует сила в направлении, взаимно перпендикулярном как направлению поля, так и проводнику с током. Правило левой руки Флеминга может определять направление вращения двигателя.Это правило гласит, что если мы вытянем указательный, средний и большой пальцы левой руки перпендикулярно каждому из них, то средний палец окажется в направлении тока в проводнике, а указательный палец — в направлении магнитного поля, то есть, с севера на южный полюс, затем большой палец указывает направление созданной механической силы.
Для ясного понимания принципа двигателя постоянного тока мы должны определить величину силы, рассматривая диаграмму ниже.
Мы знаем, что когда бесконечно малый заряд dq движется со скоростью v под действием электрического поля E и магнитного поля B, тогда сила Лоренца dF, испытываемая зарядом, определяется выражением: —
Для работы двигателя постоянного тока , учитывая E = 0.
т.е. это произведение dq v и магнитного поля B.
Где dL — длина проводника, несущего заряд q.
Из диаграммы 1 st мы можем видеть, что конструкция двигателя постоянного тока такова, что направление тока через проводник якоря во всех случаях перпендикулярно полю.Следовательно, сила действует на проводник якоря в направлении, перпендикулярном как однородному полю, так и постоянному току.
Итак, если мы возьмем ток в левой части проводника якоря равным I, а ток в правой части проводника якоря равным -I, потому что они текут в противоположном направлении друг к другу. .
Затем сила на левом проводе якоря,
Точно так же сила на правом проводе,
Следовательно, мы можем видеть, что в этом положении сила с обеих сторон одинакова по величине, но противоположна в направление.Поскольку два проводника разделены некоторым расстоянием w = шириной витка якоря, две противоположные силы создают вращающую силу или крутящий момент, который приводит к вращению проводника якоря.
Теперь давайте рассмотрим выражение крутящего момента, когда поворот якоря создает угол α (альфа) с его начальным положением.
Создаваемый крутящий момент равен,
Здесь α (альфа) — угол между плоскостью поворота якоря и исходной плоскостью или начальным положением якоря, которое здесь находится вдоль направления магнитного поля.
Наличие члена cosα в уравнении крутящего момента очень хорошо означает, что в отличие от силы крутящий момент во всех положениях не является одинаковым. Фактически, он меняется с изменением угла α (альфа). Чтобы объяснить изменение крутящего момента и принцип вращения двигателя, давайте проведем пошаговый анализ.
Шаг 1:
Первоначально рассматриваемый якорь находится в его начальной точке или исходном положении, где угол α = 0.
Так как α = 0, член cos α = 1 или максимальное значение, следовательно, крутящий момент в этом положении максимальное значение τ = BILw.Этот высокий пусковой момент помогает преодолеть начальную инерцию покоя якоря и приводит его во вращение.
Шаг 2:
После того, как якорь приводится в движение, угол α между фактическим положением якоря и его начальным исходным положением продолжает увеличиваться на пути его вращения, пока не станет 90 o от его исходного положения. Следовательно, уменьшается член cosα, а также значение крутящего момента.
Крутящий момент в этом случае определяется выражением τ = BILwcosα, которое меньше, чем BIL w, когда α больше 0 o .
Шаг 3:
На пути вращения якоря достигается точка, в которой фактическое положение ротора точно перпендикулярно его начальному положению, т.е. α = 90 o , и в результате член cosα = 0.
Крутящий момент, действующий на проводник в этом положении, определяется выражением
, т.е. в этом случае на якорь практически не действует крутящий момент. Но все же якорь не останавливается, это связано с тем, что работа двигателя постоянного тока спроектирована таким образом, что инерции движения в этой точке достаточно, чтобы преодолеть эту точку нулевого крутящего момента. .Как только ротор пересекает это положение, угол между фактическим положением якоря и исходной плоскостью снова уменьшается, и на него снова начинает действовать крутящий момент.
