Как устроен электродвигатель и на каком принципе он работает. Какие основные компоненты входят в конструкцию электродвигателя. Как взаимодействуют магнитные поля статора и ротора. Какие виды электродвигателей существуют и в чем их особенности.
Основные компоненты и принцип действия электродвигателя
Электродвигатель — это устройство, преобразующее электрическую энергию в механическую. Его работа основана на взаимодействии магнитных полей статора и ротора. Рассмотрим основные компоненты электродвигателя и принцип его действия:
- Статор — неподвижная часть двигателя, создающая основное магнитное поле
- Ротор — вращающаяся часть, взаимодействующая с полем статора
- Обмотки — провода, по которым протекает электрический ток
- Щетки и коллектор — устройства для подвода тока к ротору (в двигателях постоянного тока)
При подаче электрического тока в обмотки статора создается вращающееся магнитное поле. Оно взаимодействует с магнитным полем ротора, вызывая его вращение. Крутящий момент передается на вал двигателя.
Виды электродвигателей и их особенности
Существует несколько основных видов электродвигателей, различающихся по принципу работы:
Двигатели постоянного тока
Работают от источника постоянного напряжения. Основные особенности:
- Простота регулирования скорости вращения
- Высокий пусковой момент
- Наличие щеточно-коллекторного узла
Асинхронные двигатели переменного тока
Наиболее распространенный тип. Ключевые характеристики:
- Простая и надежная конструкция
- Работа от стандартной трехфазной сети
- Скорость вращения ротора меньше скорости магнитного поля статора
Синхронные двигатели
Ротор вращается синхронно с магнитным полем статора. Отличительные черты:
- Постоянная скорость вращения независимо от нагрузки
- Высокий КПД при больших мощностях
- Сложность запуска
Принцип работы коллекторного двигателя постоянного тока
Коллекторный двигатель постоянного тока имеет ряд особенностей:
- Ток подается на обмотки ротора через щетки и коллектор
- При вращении ротора происходит переключение обмоток
- Это обеспечивает постоянное направление вращающего момента
- Скорость регулируется изменением напряжения питания
Коллекторные двигатели обладают высоким пусковым моментом и широким диапазоном регулирования скорости. Однако наличие щеточно-коллекторного узла снижает надежность и требует обслуживания.

Устройство и работа асинхронного двигателя
Асинхронный двигатель имеет более простую конструкцию:
- Статор с трехфазной обмоткой
- Ротор типа «беличья клетка» или с обмоткой
- Отсутствие щеток и коллектора
Принцип действия асинхронного двигателя:
- Трехфазный ток создает вращающееся магнитное поле статора
- В обмотке ротора индуцируются токи
- Взаимодействие токов ротора с полем статора создает вращающий момент
- Ротор вращается со скоростью, меньшей скорости поля статора (асинхронно)
Асинхронные двигатели широко применяются благодаря простоте конструкции и высокой надежности. Их недостаток — сложность регулирования скорости без применения специальных устройств.
Сравнение синхронных и асинхронных двигателей
Синхронные и асинхронные двигатели имеют ряд отличий:
| Характеристика | Синхронный двигатель | Асинхронный двигатель |
|---|---|---|
| Скорость вращения | Постоянная, синхронная с полем статора | Переменная, зависит от нагрузки |
| КПД | Выше, особенно при больших мощностях | Немного ниже |
| Пусковые характеристики | Требуют специальных устройств для пуска | Хорошие пусковые характеристики |
| Сложность конструкции | Более сложная | Простая и надежная |
Выбор типа двигателя зависит от конкретного применения. Асинхронные двигатели чаще используются в промышленности, а синхронные — в мощных установках, где важна постоянная скорость вращения.

Применение электродвигателей в современной технике
Электродвигатели находят широкое применение в различных областях:
- Промышленное оборудование (станки, конвейеры, насосы)
- Транспорт (электромобили, электропоезда, трамваи)
- Бытовая техника (стиральные машины, пылесосы, вентиляторы)
- Робототехника и автоматизация
- Аэрокосмическая отрасль
Развитие технологий привело к созданию новых типов электродвигателей:
- Бесколлекторные двигатели постоянного тока
- Шаговые двигатели для точного позиционирования
- Линейные двигатели для прямолинейного движения
Эти инновации расширяют возможности применения электродвигателей и повышают их эффективность.
Преимущества и недостатки электродвигателей
Электродвигатели имеют ряд преимуществ по сравнению с другими типами двигателей:
- Высокий КПД (до 95% и выше)
- Экологичность (отсутствие вредных выбросов)
- Простота управления и регулирования
- Низкий уровень шума и вибраций
- Возможность работы в различных условиях
Однако есть и некоторые недостатки:
- Зависимость от источника электроэнергии
- Сложность использования в автономных устройствах
- Возможные проблемы с перегревом при длительной работе
Несмотря на эти ограничения, электродвигатели остаются одним из самых эффективных и универсальных типов приводов в современной технике.
Перспективы развития электродвигателей
Развитие технологий открывает новые возможности для совершенствования электродвигателей:- Использование новых материалов (например, высокотемпературных сверхпроводников)
- Внедрение интеллектуальных систем управления
- Повышение энергоэффективности
- Миниатюризация для применения в микроэлектромеханических системах (МЭМС)
- Разработка гибридных систем с комбинацией различных типов двигателей
Эти инновации позволят расширить области применения электродвигателей и повысить их эффективность в существующих приложениях.
Урок 36 (дополнительный материал). Принцип действия электродвигателя. Электроизмерительные приборы
Принцип действия электродвигателя.
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Устройство и принцип работы простейшего электродвигателя.
В основе конструкции электрического двигателя лежит эффект, обнаруженный Майклом Фарадеем в 1821 году: что взаимодействие электрического тока и магнита может вызывать непрерывное вращение. Один из первых двигателей, нашедших практическое применение, был двигатель Бориса Семеновича Якоби (1801 –1874), приводивший в движение катер с 12 пассажирами на борту. Однако для широкого использования электродвигателя необходим был источник дешевой электроэнергии — электромагнитный генератор.
Принцип работы электродвигателя очень прост: вращение вызывается силами магнитного притяжения и отталкивания, действующими между полюсами подвижного электромагнита (ротора) и соответствующими полюсами внешнего магнитного поля, создаваемого неподвижным электромагнитом (или постоянным магнитом) — статором.
Вращающаяся часть электрической машины называется ротором (или якорем), а неподвижная — статором. В простом электродвигателе постоянного тока блок катушки служит ротором, а постоянный магнит — статором.
Сложность заключается в том, чтобы добиться непрерывного вращения двигателя. А для этого надо сделать так, чтобы полюс подвижного электромагнита, притянувшись к противоположному полюсу статора, автоматически менялся на противоположный — тогда ротор не замрет на месте, а повернется дальше — по инерции и под действием возникшего в этот момент отталкивания.
Для автоматического переключения полюсов ротора служит коллектор. Он представляет собой пару закрепленных на валу ротора пластин, к которым подключены обмотки ротора. Ток на эти пластины подается через токоснимающие контакты (щетки). При повороте ротора на 180° пластины меняются местами — это автоматически меняет направление тока и, следовательно, полюсы подвижного электромагнита. Так как одноименные полюсы взаимно отталкиваются, катушка продолжает вращаться, а ее полюсы притягиваются к соответствующим полюсам на другой стороне магнита.
Простейший электродвигатель
Простейший электродвигатель работает только на постоянном токе (от батарейки). Ток проходит по рамке, расположенной между полюсами постоянного магнита. Взаимодействие магнитных полей рамки с током и магнита заставляет рамку поворачиваться. После каждого полуоборота коллектор переключает контакты рамки, подходящие к батарейке, и поэтому рамка вращается.
В некоторых двигателях для создания магнитного поля вместо постоянного магнита служит электромагнит. Витки проволоки такого электромагнита называются обмоткой возбуждения.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Промышленный электродвигатель
Электроизмерительные приборы.
Электроизмерительные приборы — класс устройств, применяемых для измерения различных электрических величин.
Группа электромагнитных приборов является наиболее распространенной. Принцип их действия, использованный впервые еще Ф. Кольраушем в 1884 году, основан на перемещении подвижной железной части под влиянием магнитного потока, создаваемого катушкой, по которой пропускается ток. Практическое осуществление этого принципа отличается разнообразием.
Ориентирующее действие магнитного поля на контур с током используют в электроизмерительных приборах магнитоэлектрической системы – амперметрах, вольтметрах и др.
Устройство прибора магнитоэлектрической системы
Измерительный прибор магнитоэлектрической системы устроен следующим образом.
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят на двух полуосях О и О’, к которым прикреплена также стрелка прибора 4. Ось удерживается двумя тонкими спиральными пружинами 3. Силы упругости пружин, возвращающие рамку к положению равновесия в отсутствие тока, подобраны такими, чтобы были пропорциональными углу отклонения стрелки от положения равновесия. Катушку помещают между полюсами постоянного магнита М с наконечниками формы полого цилиндра. Внутри катушки располагают цилиндр 1 из мягкого железа. Такая конструкция обеспечивает радиальное направление линий магнитной индукции в области нахождения витков катушки (см рисунок).
В результате при любом положении катушки силы, действующие на нее со стороны магнитного поля, максимальны и при неизменной силе тока постоянны. Векторы F и –F изображают силы, действующие на катушку со стороны магнитного поля и поворачивающие ее. Катушка с током поворачивается до тех пор, пока силы упругости со стороны пружины не уравновесят силы, действующие на рамку со стороны магнитного поля. Увеличивая силу тока в рамке в 2 раза, рамка повернётся на угол, вдвое больший. Это происходит потому, что Fm~I.
Силы, действующие на рамку с током прямо пропорциональны силе тока, то есть можно, проградуировав прибор, измерять силу тока в рамке.
Точно так же можно прибор настроить на измерение напряжения в цепи, если проградуировать шкалу в вольтах, причём сопротивление рамки с током должно быть выбрано очень большим по сравнению с сопротивлением участка цепи, на котором измеряем напряжение.
Дополнительные материалы.
1. Видео-ролик «Принцип работы электродвигателя»
2. Презентация «Электроизмерительные приборы» скачать с Яндекса
Медиа-материалы из Единой коллекции Цифровых Образовательных Ресурсов:
Рисунок «Вольтметр» 8_140
Рисунок-плакат «Электродвигатель» 8_224
Слайд-шоу «Работа электродвигателя» 8_225
Рисунок-плакат «Электроизмерительный прибор электродинамической системы» 8_227
Рисунок-плакат «Электроизмерительный прибор» 8_228
Слайд-шоу «Работа амперметра» 8_229
Слайд-шоу «Работа электроизмерительного прибора» 8_230
Принцип действия электродвигателя
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Принцип работы электродвигателя — основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором. Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи.
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Принцип работы электродвигателя — разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
 В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.

Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.

При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.

На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
- обмотка секционирована не на две, а на большее количество частей;
- каждая секция обмотки смонтирована на своем полюсе;
- коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.

У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону. периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

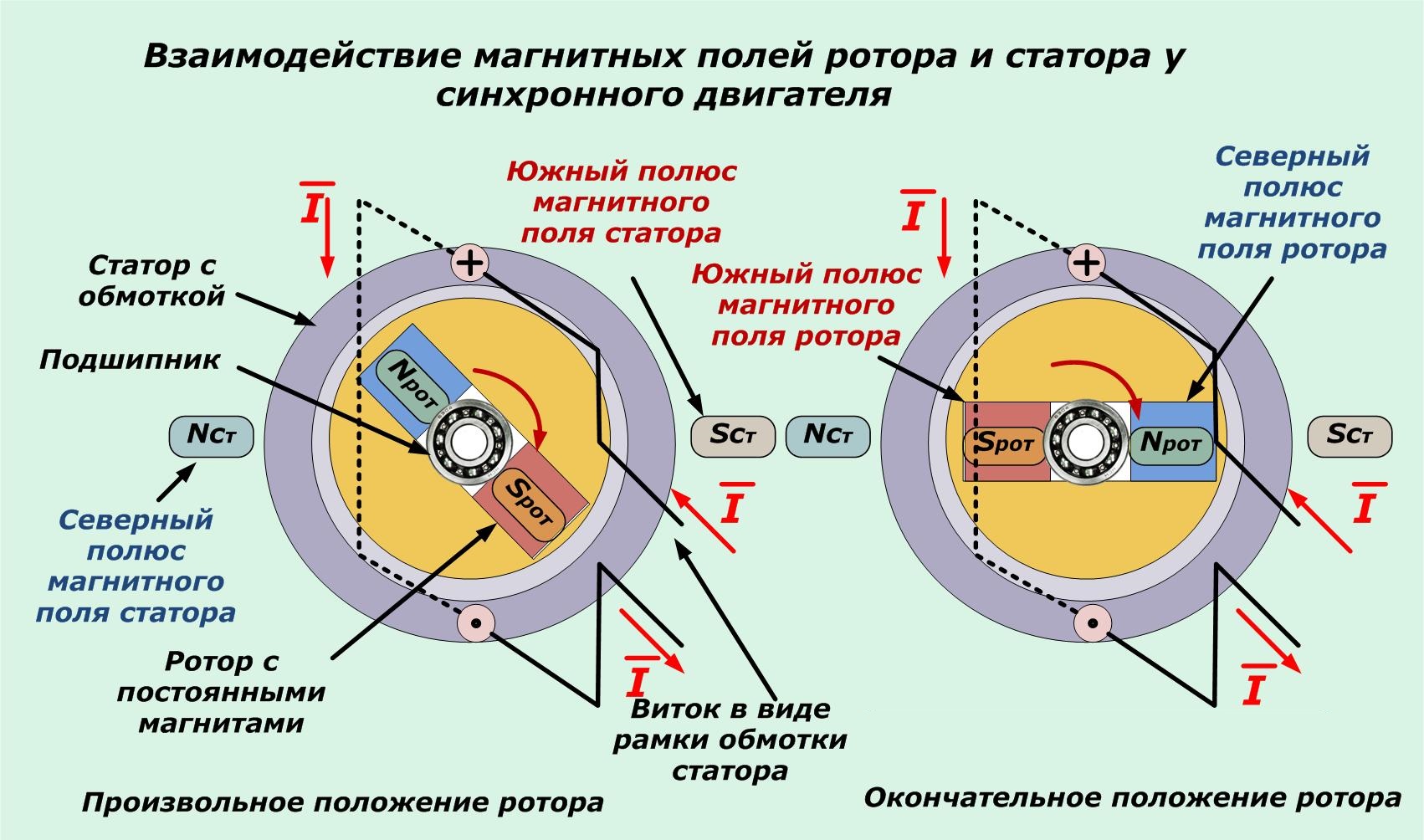
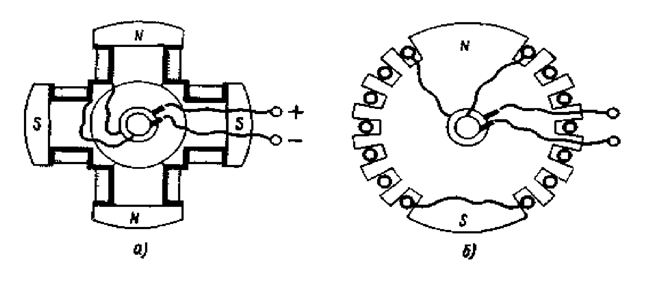
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.

В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.

В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «·».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.

Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе. Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.

Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.

Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.

У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
низкие энергетические показатели.
Основные понятия
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.

Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.

Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.

Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Вращение под действием магнитного поля
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.

Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.

Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.

Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.

Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.

В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).

Принцип действия
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.



Статор электродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.

Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор электродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.

При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).

Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.

Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
Принцип действия электродвигателя
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором. Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи .
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.

Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
принцип работы и устройство (фото)
Синхронный электродвигатель – электрическая установка, действующая от сети переменного и постоянного тока. Синхронная машина улучшает коэффициент мощности. Данные моторы используются довольно часто в электрической системе, потому что они подходят для любой сети напряжения и обладают высокими экономическими данными.
Область применения
- конвейеры,
- мощные вентиляторы,
- мельницы,
- эксгаустеры,
- компрессоры,
- дробилки,
- прокатные станки.
Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Устройство электродвигателя
Синхронный мотор имеет две основные части — статор и ротор. Неподвижная часть называется статором, а подвижный элемент ротором.
 Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Однофазный двигатель с короткозамкнутым ротором, расположенным в статоре или снаружи в двигателях обращенного вида. В основе ротора — постоянные магниты. Материал магнитов имеет высокую коэрцитивную силу. Полюсы ротора могут быть явно и неявно выраженными. Синхронный двигатель с короткозамкнутым ротором бывает с магнитами на поверхности или с уже встроенными.
Статор представлен корпусом и сердечником, состоящим из двухфазных и трехфазных обмоток. Обмотка бывает распределенная и сосредоточенная. У распределенной насчитываются пазы полюса и фазы Q= 2,3.
У сосредоточенной обмотки пазы полюса и фазы Q=1. Пазы размещены на одинаковом расстоянии на окружности неподвижной части двигателя. Катушки статора соединяются последовательно или параллельно. Такие обмотки не могут влиять на форму кривой ЭДС. Электродвижущая сила имеет трапецеидальную и синусоидальную форму. У явно выраженного полюса форма ротора и наводимая электродвижущая сила проводника является трапециевидной формы (а). При необходимости создания синусоидальной ЭДС, полюсные наконечники приобретают другую форму, где величина кривой распределения индукции близкая синусоидальной. Осуществление возможно благодаря наличию скосов на наконечнике полюса ротора.
Ротор синхронного двигателя переменного тока: а — явно выраженный полюс, 6 — неявно выраженный полюс.
Неявно выраженные полюса обладают равной индуктивностью продольных и поперечных осей, а явно выраженные полюса имеют одинаковую величину поперечной и продольной индуктивности (б).
Принцип действия

Принцип действия электрической машины переменного тока: 1 — статор, 2 — ротор.
У однофазного двигателя отсутствует пусковой момент. При подключении обмотки якоря к сети переменного тока, ротор неподвижен, в обмотку возбуждения поступает постоянный ток, за время одного изменения напряжения, два раза происходит смена направления электромагнитного момента. Значение среднего момента равняется нулю. Ротор разгоняется посредством внешнего момента до вращающейся частоты, которая приближается к синхронности.
Из-за высокого значения коэффициента мощности обеспечивается снижение потребления электричества, уменьшаются потери. В сравнении с асинхронным механизмом с такой же мощностью, синхронный двигатель имеет КПД выше. Так как крутящийся момент аналогичен напряжению сети. Даже снижение напряжения не влияет на нагрузочную способность. Что свидетельствует о надежности механизма.
Тип подключения делится на однофазный и трехфазный. Синхронные агрегаты чаще бывают трехфазными. При положении проводников трехфазного двигателя в определенной геометрической позиции появляется электромагнитное поле, которое вращается с одновременной скоростью. При имении магнита во вращающемся поле, они замыкают, крутятся параллельно. Двигатель можно назвать нерегулируемым, так как его скорость постоянная.
Пуск электродвигателя
Существует два способа пуска синхронной машины.
- Асинхронное включение
Схема пуска на основе глухо подключенного возбудителя, применима для статистического момента нагрузки менее 0,4, без падений напряжения.
![]()
Асинхронный пуск с помощью трансформатора
В обмотке возбуждения замыкается сопротивление разряда, избегая тем самым перебои возбуждения обмотки на впуске, потому как на небольшой скорости вращения ротора возникают перенапряжения. Если скорость приближается к синхронной, реагирует контактор, а обмотка возбуждения переключается из разрядного сопротивления на якорь возбудителя.
- Применение тиристорного возбудителя
Возбуждение, осуществляемое при помощи электромагнитного реле
Пуск с тиристорным возбудителем более надежный, обладает высоким КПД. Легче становится управление возбуждением, напряжение шин, остановка в аварийном режиме. Во многих моделях электродвигателей установлены тиристорные возбудители. Подача возбуждения работает автоматически функцией скорости и тока.
Синхронный компенсатор
Упрощенная конструкция для холостого хода называется компенсатором.
 Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Потребление электричества, помимо активной мощности, нуждается в реактивной мощности. Генератор вырабатывает реактивную мощность с минимальными затратами. Переход реактивной мощности генератора связан с потерями на линии передач. Поэтому применение компенсаторов является обоснованным экономически. При возбуждении синхронные двигатели не используют напряжение сети, а при перевозбуждении отдают реактивную мощность.
Синхронный электродвигатель применяется в сети переменного и постоянного тока, обеспечивая высокую надежность работы. Этот двигатель улучшит коэффициент мощности предприятия.
Урок 36 (дополнительный материал). Принцип действия электродвигателя. Электроизмерительные приборы
Принцип действия электродвигателя.
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Устройство и принцип работы простейшего электродвигателя.
В основе конструкции электрического двигателя лежит эффект, обнаруженный Майклом Фарадеем в 1821 году: что взаимодействие электрического тока и магнита может вызывать непрерывное вращение. Один из первых двигателей, нашедших практическое применение, был двигатель Бориса Семеновича Якоби (1801 –1874), приводивший в движение катер с 12 пассажирами на борту. Однако для широкого использования электродвигателя необходим был источник дешевой электроэнергии — электромагнитный генератор.
Принцип работы электродвигателя очень прост: вращение вызывается силами магнитного притяжения и отталкивания, действующими между полюсами подвижного электромагнита (ротора) и соответствующими полюсами внешнего магнитного поля, создаваемого неподвижным электромагнитом (или постоянным магнитом) — статором.
Вращающаяся часть электрической машины называется ротором (или якорем), а неподвижная — статором. В простом электродвигателе постоянного тока блок катушки служит ротором, а постоянный магнит — статором.
Сложность заключается в том, чтобы добиться непрерывного вращения двигателя. А для этого надо сделать так, чтобы полюс подвижного электромагнита, притянувшись к противоположному полюсу статора, автоматически менялся на противоположный — тогда ротор не замрет на месте, а повернется дальше — по инерции и под действием возникшего в этот момент отталкивания.
Для автоматического переключения полюсов ротора служит коллектор. Он представляет собой пару закрепленных на валу ротора пластин, к которым подключены обмотки ротора. Ток на эти пластины подается через токоснимающие контакты (щетки). При повороте ротора на 180° пластины меняются местами — это автоматически меняет направление тока и, следовательно, полюсы подвижного электромагнита. Так как одноименные полюсы взаимно отталкиваются, катушка продолжает вращаться, а ее полюсы притягиваются к соответствующим полюсам на другой стороне магнита.
Простейший электродвигатель
Простейший электродвигатель работает только на постоянном токе (от батарейки). Ток проходит по рамке, расположенной между полюсами постоянного магнита. Взаимодействие магнитных полей рамки с током и магнита заставляет рамку поворачиваться. После каждого полуоборота коллектор переключает контакты рамки, подходящие к батарейке, и поэтому рамка вращается.
В некоторых двигателях для создания магнитного поля вместо постоянного магнита служит электромагнит. Витки проволоки такого электромагнита называются обмоткой возбуждения.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Промышленный электродвигатель
Электроизмерительные приборы.
Электроизмерительные приборы — класс устройств, применяемых для измерения различных электрических величин.
Группа электромагнитных приборов является наиболее распространенной. Принцип их действия, использованный впервые еще Ф. Кольраушем в 1884 году, основан на перемещении подвижной железной части под влиянием магнитного потока, создаваемого катушкой, по которой пропускается ток. Практическое осуществление этого принципа отличается разнообразием.
Ориентирующее действие магнитного поля на контур с током используют в электроизмерительных приборах магнитоэлектрической системы – амперметрах, вольтметрах и др.
Устройство прибора магнитоэлектрической системы
Измерительный прибор магнитоэлектрической системы устроен следующим образом.
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят на двух полуосях О и О’, к которым прикреплена также стрелка прибора 4. Ось удерживается двумя тонкими спиральными пружинами 3. Силы упругости пружин, возвращающие рамку к положению равновесия в отсутствие тока, подобраны такими, чтобы были пропорциональными углу отклонения стрелки от положения равновесия. Катушку помещают между полюсами постоянного магнита М с наконечниками формы полого цилиндра. Внутри катушки располагают цилиндр 1 из мягкого железа. Такая конструкция обеспечивает радиальное направление линий магнитной индукции в области нахождения витков катушки (см рисунок).
В результате при любом положении катушки силы, действующие на нее со стороны магнитного поля, максимальны и при неизменной силе тока постоянны. Векторы F и –F изображают силы, действующие на катушку со стороны магнитного поля и поворачивающие ее. Катушка с током поворачивается до тех пор, пока силы упругости со стороны пружины не уравновесят силы, действующие на рамку со стороны магнитного поля. Увеличивая силу тока в рамке в 2 раза, рамка повернётся на угол, вдвое больший. Это происходит потому, что Fm~I.
Силы, действующие на рамку с током прямо пропорциональны силе тока, то есть можно, проградуировав прибор, измерять силу тока в рамке.
Точно так же можно прибор настроить на измерение напряжения в цепи, если проградуировать шкалу в вольтах, причём сопротивление рамки с током должно быть выбрано очень большим по сравнению с сопротивлением участка цепи, на котором измеряем напряжение.
Дополнительные материалы.
1. Видео-ролик «Принцип работы электродвигателя»
2. Презентация «Электроизмерительные приборы» скачать с Яндекса
Медиа-материалы из Единой коллекции Цифровых Образовательных Ресурсов:
Рисунок «Вольтметр» 8_140
Рисунок-плакат «Электродвигатель» 8_224
Слайд-шоу «Работа электродвигателя» 8_225
Рисунок-плакат «Электроизмерительный прибор электродинамической системы» 8_227
Рисунок-плакат «Электроизмерительный прибор» 8_228
Слайд-шоу «Работа амперметра» 8_229
Слайд-шоу «Работа электроизмерительного прибора» 8_230
Принцип действия электрического двигателя 🚩 как работает электромотор 🚩 Наука 🚩 Другое
Электродвигателем называется техническая система, в которой энергия электричества трансформируется в энергию механического типа. Работа такого двигателя построена на явлении электромагнитной индукции. Устройство электромотора предполагает наличие в нем неподвижного элемента – статора, а также подвижной части, называемой якорем или ротором.
В традиционном электрическом двигателе статор – это внешняя часть конструкции. Этот элемент формирует неподвижное магнитное поле. Подвижный ротор помещают внутрь статора. В его состав входят постоянные магниты, сердечник с обмотками, коллектор и щетки. Электрические токи протекают через обмотку, состоящую обычно из множества витков медного провода.
При работе электродвигателя, подключенного к источнику энергии, происходит взаимодействие полей статора и ротора. Появляется вращающий момент. Он и приводит ротор электромотора в движение. Таким образом, подаваемая на обмотки электроэнергия трансформируется в энергию вращательного движения. Вращение вала электродвигателя передается на рабочий орган технической системы, в состав которой включен двигатель.
Электродвигатель представляет собой одну из разновидностей электрических машин, к которым также относятся и генераторы. Благодаря свойству обратимости электромотор в случае необходимости способен выполнять функции генератора. Возможен и обратный переход. Но чаще всего каждую электрическую машину конструируют исключительно для выполнения вполне определенной функции. Иными словами, электромотор будет эффективнее всего работать именно в этом своем качестве.
Происходящее в двигателе преобразование электроэнергии в энергию механического вращения непременно связано с энергетическими потерями. Причинами этого явления становится нагревание проводников, намагничивание сердечников, вредная сила трения, возникающая даже при использовании подшипников. На коэффициент полезного действия электромотора влияет даже трение движущихся частей о воздух. И все же в самых совершенных двигателях КПД достаточно высок и может достигать 90%.
Обладая рядом неоспоримых достоинств, двигатели, работающие на электричестве, получили чрезвычайно широкое распространение в промышленности и в быту. Главное преимущество такого двигателя состоит в удобстве его использования и высоких эксплуатационных характеристиках. Электромотор не дает вредных выбросов в атмосферу, поэтому очень перспективно его применение в автомобилях.
устройство, принцип работы, режимы работы, пуск
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
 Рис. 1. Устройство синхронного электродвигателя
Рис. 1. Устройство синхронного электродвигателя- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
 Рис. 2. Принцип действия синхронного электродвигателя
Рис. 2. Принцип действия синхронного электродвигателяКак видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
 Рис. 3. Принцип формирования потоков в синхронной электрической машине
Рис. 3. Принцип формирования потоков в синхронной электрической машинеПри подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
 Рис. 4. Схематическое обозначение синхронного электродвигателя
Рис. 4. Схематическое обозначение синхронного электродвигателя Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
 Рис. 5. Отличие асинхронного от синхронного электродвигателя
Рис. 5. Отличие асинхронного от синхронного электродвигателя Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
 Рис. 6. Синхронный электродвигатель с постоянными магнитами
Рис. 6. Синхронный электродвигатель с постоянными магнитамиС реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
 Рис. 7. Пример реактивного ротора
Рис. 7. Пример реактивного ротораВ зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
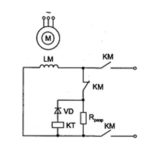
 Рис. 8. Схема пуска синхронного двигателя
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
 Рис. 9. Генераторный способ пуска синхронного двигателя
Рис. 9. Генераторный способ пуска синхронного двигателяКак видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
 Рис. 10. Тиристорная схема пуска синхронного двигателя
Рис. 10. Тиристорная схема пуска синхронного двигателяВ первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Библиографический список
- Ю.А. Макаричев, В.Н. Овсянников «Синхронные машины» 2010
- Абрамович Б.Н., Круглый А.А. «Возбуждение, регулирование и устойчивость синхронных двигателей» 1983
- Андреева Е.Г., Морозова Н.С. «Синхронные машины» 2015
- Глебов И.А. «Проблемы пуска сверхмощных синхронных маши» 1988
- Емец В.Ф., Попков А.А., Петров Г.А. «Синхронные электрические машины» 2009
- Кислицын А.Л. «Синхронные машины» 2000
Электродвигатель — части двигателя, работа электродвигателя и применение
-
- Классы
- Класс 1–3
- Класс 4–5
- Класс 6–10
- Класс 11–12
- КОНКУРЕНТНЫЙ ЭКЗАМЕН
- BNAT 000 000 NC Книги
- Книги NCERT для класса 5
- Книги NCERT для класса 6
- Книги NCERT для класса 7
- Книги NCERT для класса 8
- Книги NCERT для класса 9
- Книги NCERT для класса 10
- Книги NCERT для класса 11
- Книги NCERT для класса 12
- NCERT Exemplar
- NCERT Exemplar Class 8
- NCERT Exemplar Class 9
- NCERT Exemplar Class 10
- NCERT Exemplar Class 11
- 9000 9000
- NCERT Exemplar Class
- Решения RS Aggarwal, класс 12
- Решения RS Aggarwal, класс 11
- Решения RS Aggarwal, класс 10 90 003 Решения RS Aggarwal класса 9
- Решения RS Aggarwal класса 8
- Решения RS Aggarwal класса 7
- Решения RS Aggarwal класса 6
- Решения RD Sharma
- RD Sharma Class 6 Решения
- Решения RD Sharma
- Решения RD Sharma класса 8
- Решения RD Sharma класса 9
- Решения RD Sharma класса 10
- Решения RD Sharma класса 11
- Решения RD Sharma класса 12
- BNAT 000 000 NC Книги
- PHYSICS
- Механика
- Оптика
- Термодинамика Электромагнетизм
- ХИМИЯ
- Органическая химия
- Неорганическая химия
- Периодическая таблица
- MATHS
- Теорема Пифагора 0004
- 000300030004
- Простые числа
- Взаимосвязи и функции
- Последовательности и серии
- Таблицы умножения
- Детерминанты и матрицы
- Прибыль и убыток
- Полиномиальные уравнения
- Деление фракций
- Классы
- 000
- 000
- 000
- 000
- 000
- 000 Microology
- 000
- 000 Microology
- 000 BIOG3000
- FORMULAS
- Математические формулы
- Алгебраические формулы
- Тригонометрические формулы
- Геометрические формулы
- КАЛЬКУЛЯТОРЫ
- Математические калькуляторы
- 0003000 PBS4000
- 000300030002 Примеры калькуляторов химии Класс 6
- Образцы бумаги CBSE для класса 7
- Образцы бумаги CBSE для класса 8
- Образцы бумаги CBSE для класса 9
- Образцы бумаги CBSE для класса 10
- Образцы бумаги CBSE для класса 11
- Образцы бумаги CBSE чел. для класса 12
- CBSE — вопросник за предыдущий год, класс 10
- CBSE — за предыдущий год — вопросник, класс 12
- HC Verma Solutions Class 11 Physics
- Решения HC Verma, класс 12, физика
- Решения Лакмира Сингха, класс 9
- Решения Лакмира Сингха, класс 10
- Решения Лакмира Сингха, класс 8
- CBSE Notes
- Примечания CBSE класса 7
Трехфазные асинхронные двигатели — Принцип работы
Каков принцип работы трехфазных асинхронных двигателей?
Электродвигатель преобразует электрическую энергию в механическую, которая затем подается на различные типы нагрузок. A.c. двигатели работают от переменного тока. Электродвигатели подразделяются на синхронные, однофазные, трехфазные, асинхронные и специальные. Из всех типов трехфазные асинхронные двигатели наиболее широко используются в промышленности, главным образом потому, что для них не требуется пусковое устройство.
 Рис. Создание вращающегося магнитного поля в трехфазном асинхронном двигателе
Рис. Создание вращающегося магнитного поля в трехфазном асинхронном двигателе Трехфазный асинхронный двигатель получил свое название от того факта, что ток ротора индуцируется магнитным полем, а не электрическими соединениями.
Принцип действия трехфазного асинхронного двигателя основан на выработке среднеквадратичной силы.
Создание вращающегося магнитного поля
Статор асинхронного двигателя состоит из нескольких перекрывающихся обмоток, смещенных на электрический угол 120 °.Когда первичная обмотка или статор подключены к трехфазному источнику переменного тока, он создает вращающееся магнитное поле, которое вращается с синхронной скоростью.
Направление вращения двигателя зависит от чередования фаз линий питания и порядка, в котором эти линии подключены к статору. Таким образом, изменение мест подключения любых двух первичных клемм к источнику питания изменит направление вращения на противоположное.
Число полюсов и частота приложенного напряжения определяют синхронную скорость вращения статора двигателя.Двигатели обычно имеют 2, 4, 6 или 8 полюсов. Синхронная скорость — термин, обозначающий скорость, с которой будет вращаться поле, создаваемое первичными токами, — определяется следующим выражением.
Синхронная скорость вращения = (120 * частота питания) / Число полюсов статора
Создание магнитного потока
Вращающееся магнитное поле в статоре — это первая часть работы. Чтобы создать крутящий момент и, таким образом, вращаться, роторы должны пропускать ток.В асинхронных двигателях этот ток исходит от проводников ротора. Вращающееся магнитное поле, создаваемое в статоре, пересекает проводящие стержни ротора и индуцирует ЭДС.
Обмотки ротора асинхронного двигателя либо замкнуты через внешнее сопротивление, либо напрямую закорочены. Следовательно, ЭДС, индуцированная в роторе, заставляет ток течь в направлении, противоположном направлению вращающегося магнитного поля в статоре, и приводит к вращательному движению или крутящему моменту в роторе.
Как следствие, частота вращения ротора не достигает синхронной скорости среднеквадратичного значения в статоре. Если бы скорости совпадали, ЭДС не было бы. индуцированный в роторе, ток не будет протекать, и, следовательно, не будет создаваться крутящий момент. Разница между скоростями статора (синхронной скорости) и ротора называется скольжением.
Вращение магнитного поля в асинхронном двигателе имеет то преимущество, что не требуется никаких электрических соединений с ротором.
В результате получается двигатель, который:
- Самозапускающийся
- Взрывозащищенный (из-за отсутствия контактных колец или коллекторов и щеток, которые могут вызывать искры)
- Прочная конструкция
- Недорого
- Легче обслуживать
— Основы, типы и применение электродвигателей постоянного тока
Практически каждое механическое усовершенствование, которое мы видим вокруг себя, достигается с помощью электродвигателя. Электрические машины — это способ преобразования энергии. Двигатели потребляют электрическую энергию и производят механическую энергию. Электродвигатели используются для питания сотен устройств, которые мы используем в повседневной жизни.
Электродвигатели в целом подразделяются на две разные категории: двигатели постоянного тока (DC) и двигатели переменного тока (AC).В этой статье мы собираемся обсудить двигатель постоянного тока и его работу. А также как работают редукторные двигатели постоянного тока.
Двигатель постоянного тока — это электродвигатель, работающий от постоянного тока. В электродвигателе работа зависит от простого электромагнетизма. Проводник с током создает магнитное поле, и когда он помещается во внешнее магнитное поле, он сталкивается с силой, пропорциональной току в проводнике и силе внешнего магнитного поля.Это устройство, преобразующее электрическую энергию в механическую. Он работает на том факте, что проводник с током, помещенный в магнитное поле, испытывает силу, которая заставляет его вращаться относительно исходного положения.
Практичный двигатель постоянного тока состоит из обмоток возбуждения, обеспечивающих магнитный поток, и якоря, который действует как проводник.
 Работа бесщеточных двигателей постоянного тока
Работа бесщеточных двигателей постоянного тока На вход бесщеточного двигателя постоянного тока подается ток / напряжение, а на выходе — крутящий момент. Понять работу двигателя постоянного тока очень просто из базовой схемы, показанной ниже.Двигатель постоянного тока в основном состоит из двух основных частей. Вращающаяся часть называется ротором, а неподвижная часть также называется статором. Ротор вращается относительно статора.
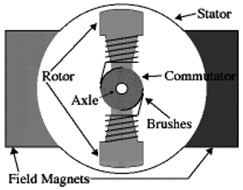 ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА Ротор состоит из обмоток, причем обмотки электрически связаны с коммутатором. Геометрия щеток, контактов коммутатора и обмоток ротора такова, что при подаче питания полярности обмотки под напряжением и магнитов статора смещены, и ротор будет вращаться до тех пор, пока он не будет почти выпрямлен с помощью полевых магнитов статора.

Когда ротор достигает выравнивания, щетки перемещаются к следующим контактам коммутатора и включают следующую обмотку. Вращение меняет направление тока через обмотку ротора, вызывая переворот магнитного поля ротора, заставляя его продолжать вращаться.
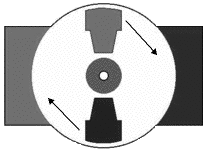
Преимущества двигателя постоянного тока:
- Обеспечивают превосходное управление скоростью для ускорения и замедления
- Простая для понимания конструкция
- Простая и дешевая конструкция привода
Подключение двигателя постоянного тока к микроконтроллеру
Микроконтроллеры не могут управлять двигателями прямо.Итак, нам нужен какой-то драйвер для управления скоростью и направлением двигателей. Драйверы двигателей будут действовать как устройства взаимодействия между микроконтроллерами и двигателями. Драйверы двигателей будут действовать как усилители тока, поскольку они принимают управляющий сигнал низкого тока и выдают сигнал высокого тока. Этот сильноточный сигнал используется для привода двигателей. Использование микросхемы L293D — простой способ управления двигателем с помощью микроконтроллера. Он содержит внутри две схемы драйвера H-моста.
Эта микросхема предназначена для управления двумя моторами.L293D имеет два набора устройств, где 1 набор имеет вход 1, вход 2, выход 1, выход 2 с контактом включения, а другой набор имеет вход 3, вход 4, выход 3, выход 4 с другим контактом разрешения.
Вот видео, относящееся к L293D
Вот пример двигателя постоянного тока, который сопряжен с микроконтроллером L293D.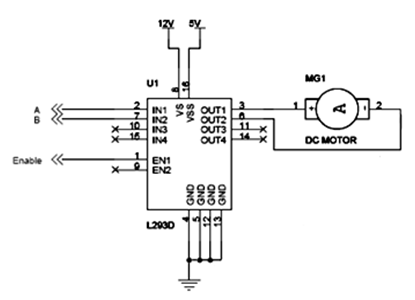 Двигатель постоянного тока, соединенный с микроконтроллером L293D
Двигатель постоянного тока, соединенный с микроконтроллером L293D L293D имеет два набора устройств, в которых один набор имеет вход 1, вход 2, выход 1 и выход 2, а другой набор имеет вход 3, вход 4, выход 3 и выход 4, в соответствии с вышеизложенным диаграмма,
- Если на выводах № 2 и 7 высокий уровень, то на выводах № 3 и 6 также высокий уровень.Если разрешение 1 и штифт 2 высокие, а штифт 7 низкий, то двигатель вращается в прямом направлении.
- Если разблокировка 1 и штифт 7 высокие, а штифт 2 низкий, то двигатель вращается в обратном направлении.
Сегодня двигатели постоянного тока все еще используются во многих областях, таких как игрушки и дисководы, или в больших размерах для работы сталепрокатных станов и бумагоделательных машин.
Уравнения двигателя постоянного тока
Величина испытываемого магнитного потока составляет
F = BlI
Где, B- Плотность потока, создаваемого магнитными обмотками
l- Активная длина проводника
I-Ток, проходящий через проводник
При вращении проводника индуцируется ЭДС, действующая в направлении, противоположном подаваемому напряжению.Он задается как
Где Ø- Fluz из-за обмоток возбуждения
P- Количество полюсов
AA постоянная
N — Скорость двигателя
Z- Количество проводов
Напряжение питания, V = E b + I a R a
Развиваемый крутящий момент равен
Таким образом, крутящий момент прямо пропорционален току якоря.
Кроме того, скорость зависит от тока якоря, следовательно, крутящий момент и скорость двигателя косвенно зависят друг от друга.
Для параллельного двигателя постоянного тока скорость остается почти постоянной, даже если крутящий момент увеличивается от холостого хода до полной нагрузки.
Для двигателя постоянного тока скорость уменьшается по мере увеличения крутящего момента от холостого хода до полной нагрузки.
Таким образом, крутящим моментом можно управлять, изменяя скорость. Управление скоростью достигается либо
- Изменение магнитного потока путем управления током через обмотку возбуждения — метод управления потоком. С помощью этого метода скорость регулируется выше номинальной.
- Контроль напряжения якоря — Обеспечивает контроль скорости ниже нормальной.
- Контроль напряжения питания — Обеспечивает контроль скорости в обоих направлениях.
Работа двигателя постоянного тока в 4 квадрантах
Как правило, двигатель может работать в 4 разных регионах:
- Как двигатель в прямом или по часовой стрелке.
- Как генератор в прямом направлении.
- В качестве двигателя в обратном или против часовой стрелки.
- Как генератор в обратном направлении.
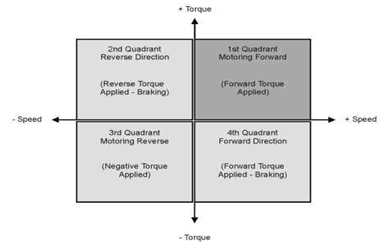 4-х квадрантный режим работы двигателя постоянного тока
4-х квадрантный режим работы двигателя постоянного тока В первом квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в положительном направлении.
Во втором квадранте направление крутящего момента меняется на противоположное, и двигатель действует как генератор
В третьем квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в отрицательном направлении.
В квадранте 4 двигатель действует как генератор в реверсивном режиме.
В первом и третьем квадранте двигатель работает как в прямом, так и в обратном направлении. Например, двигатели в кранах, чтобы поднимать груз, а также опускать его.
Во втором и четвертом квадранте двигатель действует как генератор в прямом и обратном направлениях соответственно и возвращает энергию источнику питания.Таким образом, способ управления работой двигателя, чтобы заставить его работать в любом из 4-х квадрантов, заключается в управлении его скоростью и направлением вращения. Скорость регулируется либо изменением напряжения якоря, либо ослаблением поля. Направление крутящего момента или направление вращения регулируется путем изменения степени, в которой приложенное напряжение больше или меньше обратной ЭДС.
Приложение для управления работой двигателя постоянного тока в 4-х квадрантах
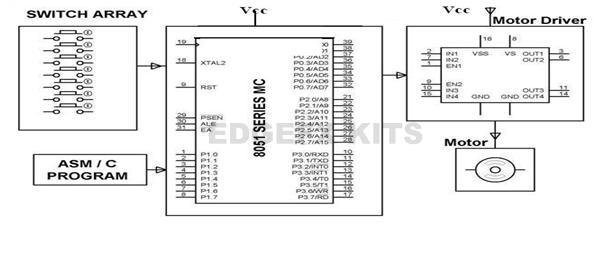 4-х квадрантное управление
4-х квадрантное управление Управление работой двигателя постоянного тока в 4-х квадрантах может быть достигнуто с помощью микроконтроллера, сопряженного с 7 переключателями.
Случай 1: Когда пуск и нажат переключатель по часовой стрелке, логика микроконтроллера выдает низкий логический уровень на контакт 7 и высокий логический уровень на контакт 2, заставляя двигатель вращаться по часовой стрелке и работать в квадранте 1 st . Скорость двигателя можно изменять, нажимая переключатель PWM, вызывая приложение импульсов различной длительности к разрешающему выводу микросхемы драйвера, таким образом изменяя приложенное напряжение.
Случай 2: При нажатии переднего тормоза логика микроконтроллера применяет низкий логический уровень к выводу 7 и высокий логический уровень к выводу 2, и двигатель стремится работать в обратном направлении, вызывая его мгновенную остановку.
Аналогичным образом нажатие переключателя против часовой стрелки заставляет двигатель двигаться в обратном направлении, то есть работать в квадранте 3 rd , а нажатие переключателя тормоза заднего хода приводит к мгновенной остановке двигателя.
Таким образом, правильным программированием микроконтроллера и переключателями можно управлять работой двигателя в каждом направлении.
Типы двигателей постоянного тока
Редукторные двигатели постоянного тока:
Редукторные двигатели имеют тенденцию снижать скорость двигателя, но с соответствующим увеличением крутящего момента.Это свойство очень удобно, поскольку двигатели постоянного тока могут вращаться со скоростью, слишком высокой для электронного устройства. Мотор-редукторы обычно состоят из щеточного двигателя постоянного тока и редуктора, прикрепленного к валу. Двигатели различаются как приводные от двух соединенных между собой агрегатов. Он имеет множество применений из-за затрат на проектирование, упрощает создание приложений, таких как промышленное оборудование, приводы, медицинские инструменты и робототехника.
- Ни один хороший робот не может быть построен без шестеренок.Учитывая все обстоятельства, очень важно хорошее понимание того, как шестерни влияют на такие параметры, как крутящий момент и скорость.
- Шестерни работают по принципу механического преимущества. Это означает, что, используя разные диаметры шестерен, мы можем менять скорость вращения и крутящий момент. Роботы не имеют желаемого отношения скорости к крутящему моменту.
- В робототехнике крутящий момент лучше скорости. С шестеренками можно менять высокую скорость на лучший крутящий момент. Увеличение крутящего момента обратно пропорционально снижению скорости.
 Редукторные двигатели постоянного тока
Редукторные двигатели постоянного тока Снижение скорости редукторного двигателя постоянного тока:
 Снижение скорости редукторного двигателя постоянного тока
Снижение скорости редукторного двигателя постоянного тока Снижение скорости в редукторах состоит из маленькой шестерни, приводящей в движение большую шестерню. В редукторе может быть несколько комплектов этих редукторов. Иногда цель использования редукторного двигателя состоит в том, чтобы уменьшить скорость вращения вала двигателя в приводимом устройстве, например, в небольших электрических часах, где крошечный синхронный двигатель может вращаться со скоростью 1200 об / мин, но снижается до одного об / мин для привода. секундная стрелка и дополнительно уменьшенная в часовом механизме для управления минутной и часовой стрелками.Здесь величина движущей силы не имеет значения, пока ее достаточно для преодоления фрикционных ударов часового механизма.
Двигатель постоянного тока серии :
Двигатель сериипредставляет собой двигатель постоянного тока, в котором обмотка возбуждения внутри последовательно соединена с обмоткой якоря. Серийный двигатель обеспечивает высокий пусковой момент, но никогда не должен работать без нагрузки и способен перемещать очень большие нагрузки на валу при первом включении. Серийные двигатели также известны как двигатели с последовательной обмоткой.
В последовательных двигателях обмотки возбуждения последовательно соединены с якорем. Напряженность поля изменяется с увеличением тока якоря. Когда его скорость снижается из-за нагрузки, серийный двигатель развивает более высокий крутящий момент. Его пусковой момент больше, чем у других двигателей постоянного тока. Он также может легче излучать тепло, накопленное в обмотке, из-за большого количества протекающего тока. Его скорость значительно меняется между полной и нулевой нагрузкой. Когда нагрузка снимается, скорость двигателя увеличивается, а ток через якорь и катушки возбуждения уменьшается.Работа больших машин без нагрузки опасна.
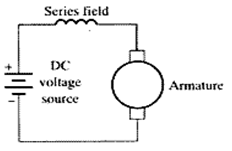 Двигатель серии
Двигатель серии Ток через якорь и катушки возбуждения уменьшается, сила силовых линий вокруг них ослабевает. Если бы сила магнитных линий вокруг катушек уменьшалась с той же скоростью, что и ток, протекающий через них, то и те, и другие уменьшались бы с той же скоростью, с которой увеличивается скорость двигателя.
Преимущества серийных двигателей:
- Огромный пусковой крутящий момент
- Простая конструкция
- Простое проектирование
- Простое техническое обслуживание
- Рентабельность
Применения серийных двигателей:
Двигатели сериимогут производить огромную мощность вращения, крутящий момент из состояния холостого хода.Эта характеристика делает серийные двигатели подходящими для небольших электроприборов, универсального электрического оборудования и т. Д. Серийные двигатели не подходят, когда требуется постоянная скорость. Причина в том, что скорость серийных двигателей сильно меняется в зависимости от нагрузки.
Шунтирующий двигатель :
Шунтирующий двигатель — это шунтирующий двигатель постоянного тока, в котором обмотки возбуждения шунтированы или подключены параллельно обмотке якоря двигателя. Шунтирующий двигатель постоянного тока обычно используется из-за его наилучшего регулирования скорости.Также, следовательно, и обмотка якоря, и обмотки возбуждения имеют одинаковое напряжение питания, однако существуют отдельные ветви для потока тока якоря и тока возбуждения.
Параллельный двигатель имеет несколько отличительных рабочих характеристик от серийного двигателя. Поскольку катушка шунтирующего поля сделана из тонкой проволоки, она не может производить большой ток для запуска, как последовательное поле. Это означает, что параллельный двигатель имеет чрезвычайно низкий пусковой крутящий момент, что требует, чтобы нагрузка на вал была довольно небольшой.
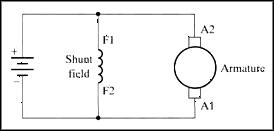 Шунтирующий двигатель
Шунтирующий двигатель Когда на шунтирующий двигатель подается напряжение, через шунтирующую катушку протекает очень слабый ток. Якорь шунтирующего двигателя аналогичен серийному двигателю, и он потребляет ток для создания сильного магнитного поля. Из-за взаимодействия магнитного поля вокруг якоря и поля, создаваемого вокруг шунтирующего поля, двигатель начинает вращаться. Как и в серийном двигателе, когда якорь начинает вращаться, он производит обратную ЭДС. Обратная ЭДС приведет к тому, что ток в якоре начнет уменьшаться до очень небольшого уровня.Величина тока, потребляемого якорем, напрямую зависит от размера нагрузки, когда двигатель достигает полной скорости. Поскольку нагрузка обычно мала, ток якоря будет небольшим.
Преимущества параллельного двигателя:
- Простое управление, обеспечивающее высокий уровень гибкости для решения сложных проблем привода
- Высокая доступность, поэтому требуются минимальные усилия по обслуживанию
- Высокий уровень электромагнитной совместимости
- Очень плавная работа, поэтому низкое механическое напряжение всей системы и высокие динамические процессы управления.
- Широкий диапазон регулирования и низкие скорости, поэтому универсальное применение.
Применение параллельного двигателя:
Параллельные двигатели постоянного тока очень подходят для применений с ременным приводом.Этот двигатель постоянной скорости используется в промышленных и автомобильных приложениях, таких как станки и намоточные / разматывающие машины, где требуется высокая точность крутящего момента.
Фото:
.Что такое бесщеточный двигатель постоянного тока (BLDC)? Структура, работа и применение
Конструкция, работа и применение BLDC (бесщеточный двигатель постоянного тока)
Бесщеточные двигатели постоянного тока (BLDC) стали предметом пристального внимания многих производителей двигателей, поскольку эти двигатели становятся все более предпочтительными выбор для многих приложений, особенно в области техники управления двигателями. Двигатели BLDC превосходят щеточные двигатели постоянного тока по многим параметрам, таким как способность работать на высоких скоростях, высокий КПД и лучший отвод тепла.
Они являются неотъемлемой частью современной приводной техники, чаще всего используются для приводов, станков, электродвигателей, робототехники, компьютерной периферии, а также для выработки электроэнергии. С развитием бессенсорной технологии, помимо цифрового управления, эти двигатели стали настолько эффективными с точки зрения общей стоимости системы, размера и надежности. 
Что такое бесщеточный двигатель постоянного тока (BLDC)?
Бесщеточный двигатель постоянного тока (известный как BLDC) — это синхронный электродвигатель с постоянными магнитами , который приводится в действие электричеством постоянного тока (DC) и выполняет систему коммутации с электронным управлением (коммутация — это процесс создания крутящего момента в двигателе. изменяя фазные токи через него в соответствующее время) вместо системы механической коммутации.Двигатели BLDC также называют двигателями с трапециевидными постоянными магнитами.
В отличие от обычного щеточного двигателя постоянного тока, в котором щетки механически контактируют с коммутатором на роторе, образуя электрический путь между источником постоянного тока и обмотками якоря ротора, двигатель BLDC использует электрическую коммутацию с ротором с постоянными магнитами и статором. с последовательностью катушек. В этом двигателе постоянный магнит (или полюса поля) вращается, а токоведущие проводники закреплены.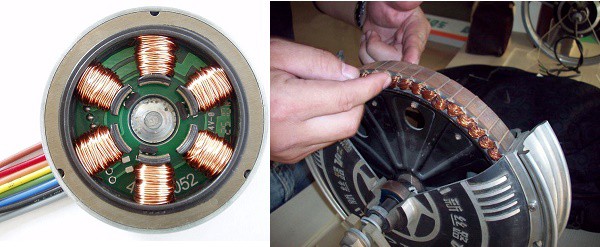
Катушки якоря переключаются электронно с помощью транзисторов или кремниевых выпрямителей в правильном положении ротора таким образом, что поле якоря находится в пространственной квадратуре с полюсами поля ротора. Следовательно, сила, действующая на ротор, заставляет его вращаться. Датчики Холла или угловые энкодеры обычно используются для определения положения ротора и размещаются вокруг статора. Обратная связь по положению ротора с датчика помогает определить, когда следует переключить ток якоря.
Эта электронная коммутационная система устраняет необходимость в коллекторном устройстве и щетках в двигателе постоянного тока и, следовательно, обеспечивает более надежную и менее шумную работу. Из-за отсутствия щеток двигатели BLDC могут работать на высоких скоростях. КПД двигателей BLDC обычно составляет от 85 до 90 процентов, тогда как электродвигатели постоянного тока щеточного типа имеют КПД от 75 до 80 процентов. Доступны широкие разновидности двигателей BLDC: от небольшого диапазона мощности до дробного, целого и большого диапазонов мощности.

Конструкция двигателя BLDC
Двигатели BLDC могут быть сконструированы в различных физических конфигурациях. В зависимости от обмоток статора они могут быть однофазными, двухфазными или трехфазными. Однако чаще всего используются трехфазные двигатели BLDC с ротором с постоянными магнитами. 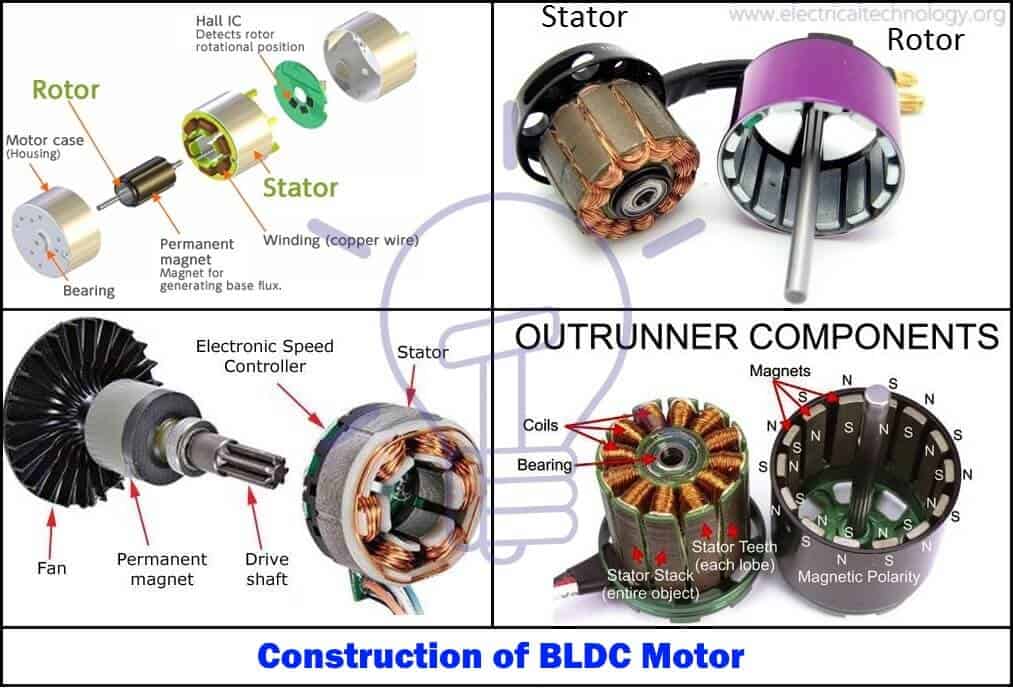
Конструкция этого двигателя во многом схожа с трехфазным асинхронным двигателем, а также с обычным двигателем постоянного тока.Этот двигатель, как и все другие двигатели, имеет статор и ротор. 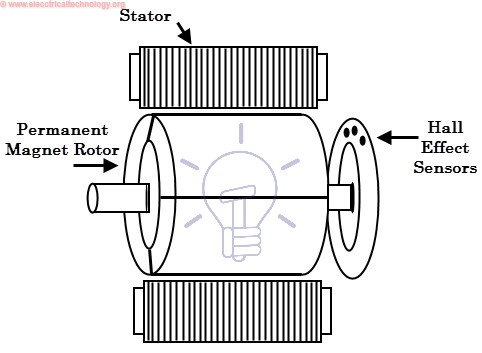
Статор двигателя BLDC, состоящий из многослойных стальных пластин, несущих обмотки. Эти обмотки размещены в пазах, которые прорезаны в осевом направлении по внутренней периферии статора. Эти обмотки могут быть расположены по схеме звезды или треугольника. Однако большинство двигателей BLDC имеют трехфазный статор, соединенный звездой.
Каждая обмотка состоит из множества соединенных между собой катушек, при этом одна или несколько катушек помещаются в каждый паз.Для формирования четного числа полюсов каждая из этих обмоток распределена по периферии статора. 
Статор необходимо выбирать с правильным номинальным напряжением в зависимости от мощности источника питания. Для робототехники, автомобилестроения и малых исполнительных устройств предпочтительны двигатели BLDC с напряжением 48 В или менее. Для промышленных приложений и систем автоматизации используются двигатели с номинальным напряжением 100 В и выше.
Ротор
Двигатель BLDC имеет постоянный магнит в роторе.Число полюсов ротора может варьироваться от 2 до 8 пар полюсов с чередованием южного и северного полюсов в зависимости от требований приложения. Для достижения максимального крутящего момента в двигателе плотность магнитного потока материала должна быть высокой. Для создания необходимой плотности магнитного поля необходим подходящий магнитный материал для ротора. 
Ферритовые магниты недороги, однако они имеют низкую магнитную индукцию для данного объема. Магниты из редкоземельных сплавов обычно используются в новых конструкциях.Некоторые из этих сплавов — самарий-кобальт (SmCo), неодим (Nd) и феррит и бор (NdFeB). Ротор может быть сконструирован с различными конфигурациями сердечника, такими как круглый сердечник с постоянным магнитом на периферии, круглый сердечник с прямоугольными магнитами и т. Д.
Датчики Холла
Датчик Холла предоставляет информацию для синхронизации возбуждения якоря статора с положением ротора . Поскольку коммутация двигателя BLDC управляется электроникой, обмотки статора должны быть последовательно запитаны для вращения двигателя.Перед подачей питания на конкретную обмотку статора необходимо подтверждение положения ротора. Таким образом, датчик Холла, встроенный в статор, определяет положение ротора.
Большинство двигателей BLDC имеют три датчика Холла, встроенные в статор. Каждый датчик генерирует сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ним. Точная последовательность коммутации обмотки статора может быть определена на основе комбинации характеристик этих трех датчиков.
Принцип работы и работа двигателя BLDC
Двигатель BLDC работает по принципу, аналогичному принципу обычного двигателя постоянного тока, т.е.е., закон силы Лоренца, который гласит, что когда проводник с током помещен в магнитное поле, он испытывает силу. В результате силы реакции на магнит будет действовать равная и противоположная сила. В случае двигателя BLDC токопроводящий проводник неподвижен, а постоянный магнит движется.
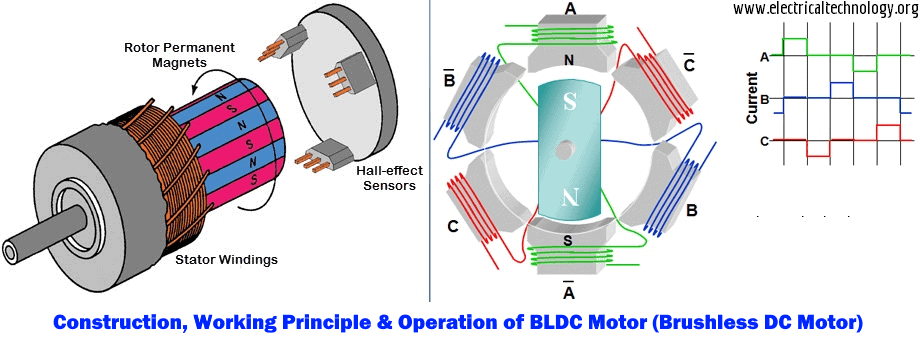
Когда обмотки статора электрически переключаются источником питания, он становится электромагнитом и начинает создавать однородное поле в воздушном зазоре.Хотя источником питания является постоянный ток, при переключении генерируется сигнал переменного напряжения трапециевидной формы. Из-за силы взаимодействия между статором электромагнита и ротором с постоянным магнитом ротор продолжает вращаться.
Рассмотрим рисунок ниже, на котором статор двигателя возбуждается в зависимости от различных состояний переключения. При переключении обмоток на сигналы высокого и низкого уровня, соответствующая обмотка запитывается как северный и южный полюса. Ротор с постоянным магнитом с северным и южным полюсами совмещен с полюсами статора, заставляя двигатель вращаться.
Обратите внимание, что двигатель создает крутящий момент из-за развития сил притяжения (при выравнивании Север-Юг или Юг-Север) и сил отталкивания (при выравнивании Север-Север или Юг-Юг). Таким образом, двигатель вращается по часовой стрелке. 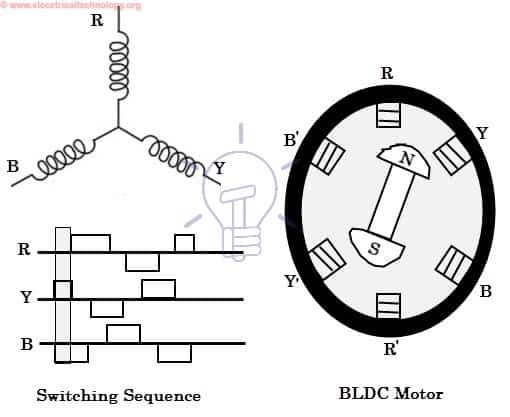
Здесь может возникнуть вопрос, как мы узнаем, какая катушка статора должна быть под напряжением и когда это делать. Это потому что; Непрерывное вращение двигателя зависит от последовательности переключения катушек. Как обсуждалось выше, датчики Холла передают электронному контроллеру обратную связь по положению вала.
На основе этого сигнала от датчика, контроллер решает включить определенные катушки. Датчики на эффекте Холла генерируют сигналы низкого и высокого уровня всякий раз, когда полюса ротора проходят рядом с ними. Эти сигналы определяют положение вала.
Бесщеточный привод двигателя постоянного тока
Как описано выше, схема электронного контроллера подает питание на соответствующую обмотку двигателя путем поворота транзистора или других твердотельных переключателей для непрерывного вращения двигателя. На рисунке ниже показана схема привода простого двигателя BLDC , которая состоит из моста MOSFET (также называемого мостом инвертора), электронного контроллера, датчика Холла и двигателя BLDC.
Здесь датчики Холла используются для обратной связи по положению и скорости. Электронный контроллер может быть блоком микроконтроллера или микропроцессором, или процессором DSP, или блоком FPGA, или любым другим контроллером. Этот контроллер получает эти сигналы, обрабатывает их и отправляет управляющие сигналы в схему драйвера MOSFET. 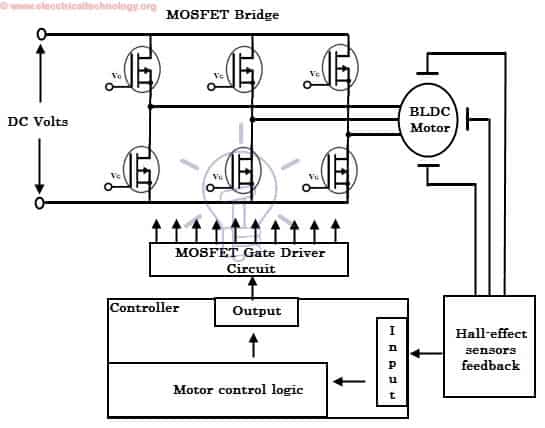
Помимо переключения на номинальную скорость двигателя, дополнительная электронная схема изменяет скорость двигателя в зависимости от требуемого применения. Эти блоки управления скоростью обычно реализуются с ПИД-регуляторами для точного управления.Кроме того, с помощью современных приводов можно производить четырехквадрантный режим работы двигателя, сохраняя при этом высокую эффективность при изменении скорости.
Связанные статьи по электроприводам
Преимущества двигателя BLDC
Двигатель BLDC имеет несколько преимуществ по сравнению с обычными двигателями постоянного тока, и некоторые из них
- У него нет механического коммутатора и связанных с ним проблем
- Высокая эффективность благодаря использованию ротор с постоянными магнитами
- Высокая скорость работы даже в нагруженных и ненагруженных условиях из-за отсутствия щеток, ограничивающих скорость
- Меньшая геометрия двигателя и меньший вес, чем щеточные двигатели постоянного тока и асинхронные двигатели переменного тока
- Длительный срок службы без проверки и техническое обслуживание требуется для системы коллектора
- Более высокая динамическая характеристика из-за низкой инерции и несущих обмоток в статоре
- Меньше электромагнитных помех
- Тихая работа (или низкий уровень шума) из-за отсутствия щеток
Недостатки бесщеточного двигателя
- Эти двигатели дорогие 9012 1 Требуется электронный контроллер для управления этим двигателем стоит дорого
- Недоступность многих интегрированных решений электронного управления, особенно для крошечных двигателей BLDC
- Требуется сложная схема привода
- Необходимы дополнительные датчики
Вы также можете прочитать: Подключение трехфазного двигателя Звезда / треугольник (Y-Δ) назад / вперед с таймером Схема питания и управления
Применения бесщеточных двигателей постоянного тока (BLDC)
Бесщеточные двигатели постоянного тока (BLDC) используются для самых разных применений требования, такие как переменные нагрузки, постоянные нагрузки и приложения для позиционирования в областях промышленного управления, автомобилестроения, авиации, систем автоматизации, медицинского оборудования и т. д.Некоторые специфические области применения двигателей BLDC:
- Жесткие диски компьютеров и DVD / CD-плееры
- Электромобили, гибридные автомобили и электрические велосипеды
- Промышленные роботы, станки с ЧПУ и простые системы с ременным приводом
- Стиральные машины, компрессоры и сушилки
- Вентиляторы, насосы и нагнетатели
Вы также можете прочитать
.