Как устроены промышленные роботы. Из каких основных частей состоит робот-манипулятор. Какие бывают типы промышленных роботов. Какие датчики используются в роботах.
Основные компоненты промышленного робота
Промышленный робот-манипулятор обычно состоит из следующих основных частей:
- Механическая рука (манипулятор) — выполняет движения и перемещения
- Приводы — обеспечивают движение звеньев манипулятора
- Система управления — контролирует движения робота
- Датчики — собирают информацию об окружающей среде
- Рабочий орган — инструмент для выполнения операций
Манипулятор промышленного робота представляет собой механическую руку, состоящую из нескольких звеньев, соединенных шарнирами. Обычно робот имеет от 4 до 6 степеней свободы, что позволяет ему совершать разнообразные движения.
Типы промышленных роботов по конструкции
Выделяют следующие основные типы промышленных роботов по конструкции:
- Декартовые (линейные) роботы — имеют три линейные оси движения
- SCARA роботы — имеют две вращательные и одну линейную оси
- Шарнирные (сочлененные) роботы — имеют несколько вращательных сочленений
- Параллельные роботы — имеют параллельные кинематические цепи
- Цилиндрические роботы — имеют одну вращательную и две линейные оси
Выбор типа робота зависит от задач, которые он должен выполнять. Наиболее универсальными и распространенными являются шарнирные роботы-манипуляторы.

Приводы промышленных роботов
Для обеспечения движений звеньев манипулятора применяются различные типы приводов:
- Электрические — наиболее распространены, обеспечивают высокую точность
- Гидравлические — развивают большие усилия, применяются для тяжелых роботов
- Пневматические — обеспечивают высокую скорость, но меньшую точность
Электрические сервоприводы являются оптимальным выбором для большинства промышленных роботов благодаря своей надежности и точности позиционирования.
Система управления робота
Система управления промышленного робота выполняет следующие основные функции:
- Хранение и выполнение управляющей программы
- Расчет траекторий движения звеньев манипулятора
- Управление приводами для реализации движений
- Обработка информации от датчиков
- Диагностика состояния робота
Современные системы управления роботами строятся на базе промышленных компьютеров или специализированных контроллеров. Они позволяют программировать сложные алгоритмы работы робота.
Датчики промышленных роботов
Для получения информации об окружающей среде и состоянии самого робота применяются различные датчики:

- Датчики положения звеньев (энкодеры) — определяют угол поворота осей
- Силомоментные датчики — измеряют усилия и моменты в сочленениях
- Тактильные датчики — определяют контакт с объектами
- Системы технического зрения — анализируют рабочую зону
- Датчики расстояния — измеряют дистанцию до объектов
Информация от датчиков позволяет роботу адаптироваться к изменениям в рабочей зоне и повышает точность его работы.
Рабочие органы промышленных роботов
На конце манипулятора робота устанавливается рабочий орган для выполнения технологических операций. Это может быть:
- Захватное устройство — для перемещения объектов
- Сварочная головка — для сварочных работ
- Краскопульт — для окрасочных работ
- Фреза или сверло — для механообработки
- Измерительный щуп — для контроля размеров
Рабочий орган подбирается под конкретную задачу, которую должен выполнять робот. Многие роботы оснащаются системой автоматической смены инструмента.
Принципы работы промышленного робота
Работа промышленного робота основана на следующих принципах:

- Робот выполняет заданную программу движений
- Система управления рассчитывает траектории перемещения звеньев
- Приводы обеспечивают движение по рассчитанным траекториям
- Датчики контролируют положение звеньев и внешнюю среду
- При необходимости вносятся корректировки в движения
Благодаря этим принципам робот может точно и быстро выполнять запрограммированные операции, адаптируясь к небольшим изменениям в рабочей зоне.
Программирование промышленных роботов
Существует несколько способов программирования промышленных роботов:
- Обучение — оператор вручную задает точки траектории
- Программирование на специальных языках (например, KRL, RAPID)
- Офлайн-программирование в CAD/CAM системах
- Программирование с помощью виртуальных симуляторов
Современные методы позволяют быстро создавать и отлаживать управляющие программы для роботов, не останавливая производственный процесс.
Применение промышленных роботов
Промышленные роботы-манипуляторы широко применяются в различных отраслях:
- Машиностроение — сварка, окраска, сборка
- Электроника — монтаж компонентов, упаковка
- Пищевая промышленность — фасовка, упаковка
- Фармацевтика — дозирование, упаковка
- Логистика — палетирование, сортировка
Роботизация позволяет повысить производительность, качество и гибкость производства, а также улучшить условия труда персонала.

Устройство (схема) промышленного робота. Приводы промышленных роботов. Механизмы промышленных роботов.
Устройство современных промышленных роботов довольно сложно. Этим объясняется то, что производители выполняют их обслуживание и ремонт практически всегда сами.
Устройство промышленного робота может быть различным в зависимости от типа робота: шарнирный робот, дельта робот или SCARA робот. Рассмотрим схему промышленного робота на примере шарнирного робота. Упрощенно робот состоит из следующих компонентов:
-
блока управления с пультом;
-
опорной конструкции;
-
привода руки манипулятора;
-
руки манипулятора;
-
запястья манипулятора;
-
захватного устройства.


Компоненты робота-манипулятора соединяются с помощью суставов (обычно от 4-х до 6). Каждый элемент представляет собой полую металлическую конструкцию с проложенными внутри коммуникациями. Каждое сочленение робота приводится в движение при помощи шаговых двигателей, которые позволяют частям робота перемещаться очень точно, при этом одинаково точно независимо от количества циклов.
Исполнительный механизм робота манипулятора представляет собой открытую кинематическую цепь, звенья которой последовательно соединены собой и обладают, как правило, одной степенью свободы. Подвижность робота определяется сочетанием и взаимным расположением сочленений, при это условно сочленения подразделяются на две группы: выполняющие транспортную функцию, предназначенные для вывода манипулятора в нужную позицию, и выполняющие ориентирующую функцию, отвечающие за ориентацию рабочего органа.
На конце манипулятора промышленного робота устанавливается исполнительный (рабочий) орган.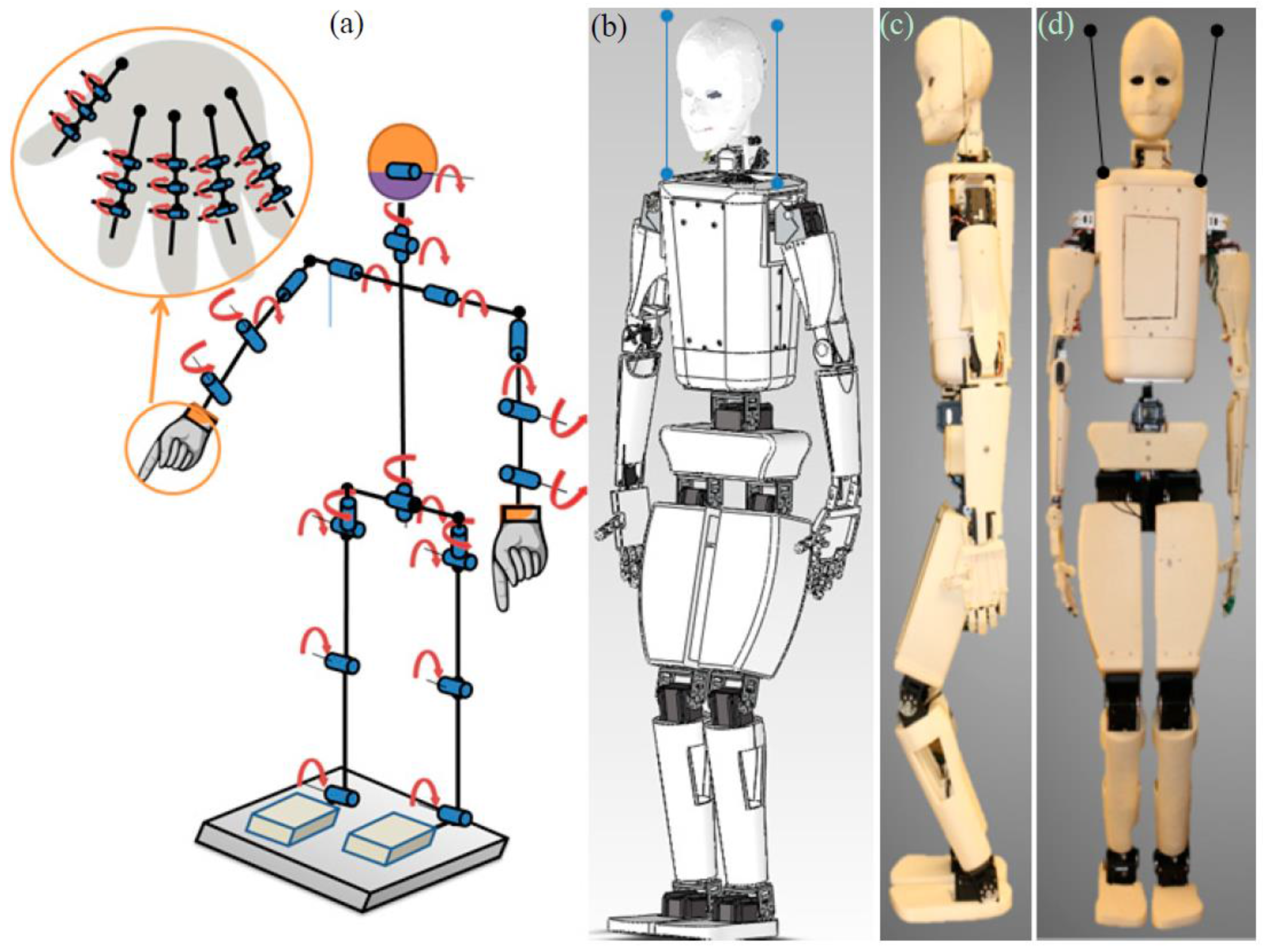 В качестве рабочего органа чаще всего выступает захват или иной специализированный инструмент. Как уже было сказано выше, самым распространенным видом исполнительного органа является схват, предназначенный для захвата и перемещения груза. Подробнее о захватах для промышленного робота вы можете прочитать по ссылке.
В качестве рабочего органа чаще всего выступает захват или иной специализированный инструмент. Как уже было сказано выше, самым распространенным видом исполнительного органа является схват, предназначенный для захвата и перемещения груза. Подробнее о захватах для промышленного робота вы можете прочитать по ссылке.
В общем виде все захватные устройства подразделяются на схватывающие, поддерживающие и удерживающие.
В качестве рабочего органа промышленного робота могут использоваться сварочные клещи, пульверизатор, фреза, дрель, нож, сварочная головка, отвертка и т.д.
Приводы промышленных роботов предназначены для приведения в движение звеньев манипулятора и бывают: электрические, гидравлические и пневматические. Об электрических приводах промышленных роботов мы немного сказали выше. Скажем еще, что электрические приводы роботов являются наиболее распространенными ввиду своей точности. Гидравлические приводы промышленных роботов обеспечивают большее усилие и быстродействие, однако они устанавливаются лишь на роботах очень большой грузоподъемности.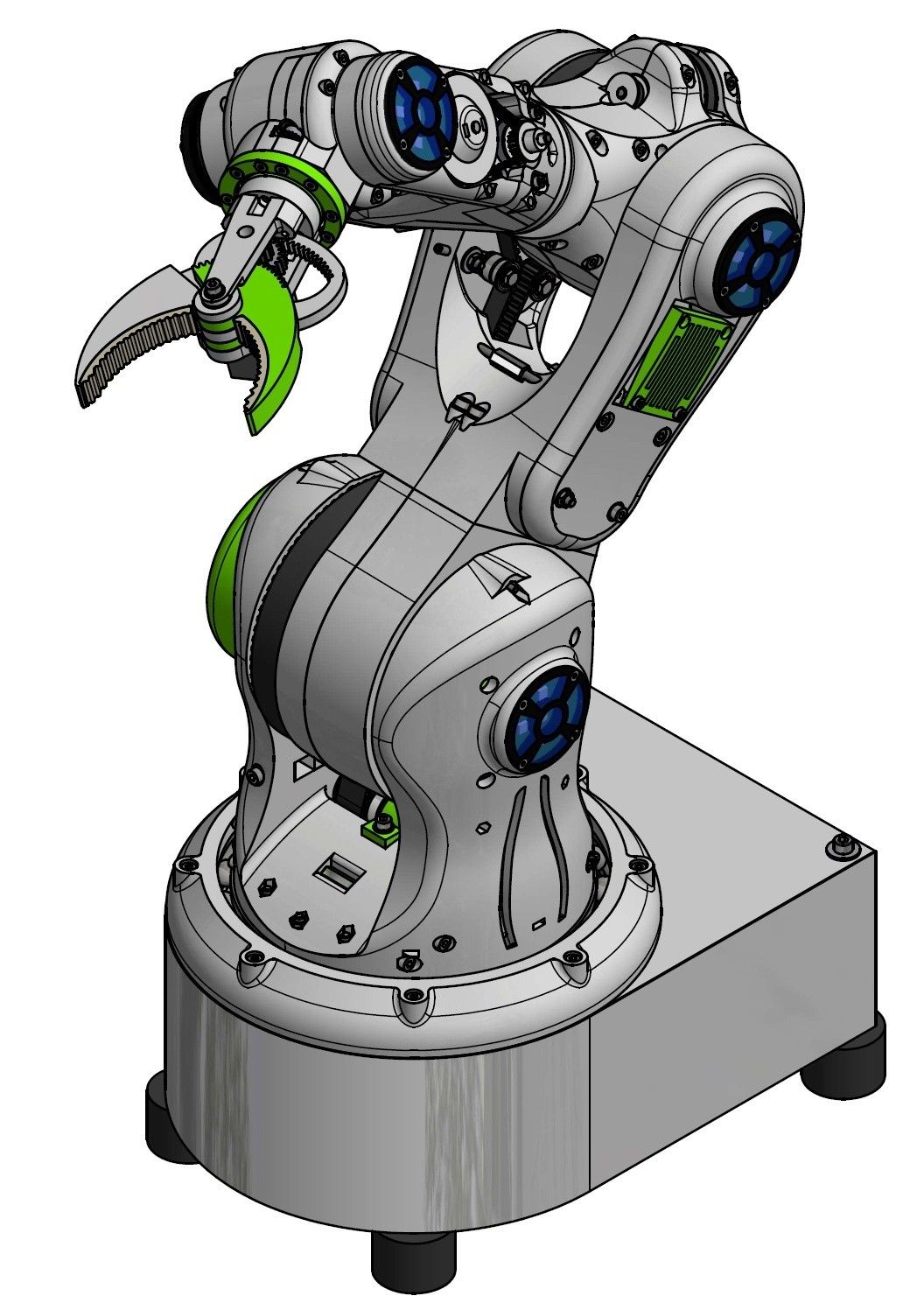
Следует отметить что механизмы промышленных роботов всех основных производителей обладают высокой износоустойчивостью, обеспечивая ресурс работы до обслуживания в несколько тысяч часов и более.
Контроллеры промышленного робота состоят из блока управления и пульта управления. Блок управления предназначен для управления роботом, при этом он может одновременно управлять несколькими роботами. Пульт управления предназначен для программирования робота или оперативного внесения изменений в его работу.
Если у вас есть какие-либо вопросы по устройству (схеме) промышленного робота вы всегда можете обратиться к специалистам компании АЛЬФА ИНЖИНИРИНГ. Мы будем рады проконсультировать вас по всем вопросам работы промышленного робота и в случае необходимости выполним внедрение робототехнической ячейки на базе роботов FANUC «под ключ».
Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека — “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения — именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
(Типы роботов)
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам — от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека — робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
- Назначения машины;
- Условий ее работы;
- Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
Человекоподобный робот состоит из нескольких основных частей:
- Голова — верхняя часть конструкции;
- Торс — основной каркас робота;
- Руки-манипуляторы с силовыми механизмами;
- Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т. е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс — наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом — задачи для верхних конечностей — манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Для распознавания окружающей обстановки — предметов, особенностей ландшафта — роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.
(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т. п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
п. Наиболее важный датчик для андроида — гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины — компьютер или систему компьютеров.
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер — набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.

Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.
(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным — аккумуляторы, солнечные батареи;
- Внешним — электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков — увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.

(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов «пальцами». Манипуляторы приводятся в действие силовыми механизмами — сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).
(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.
д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси — шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.
(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке
- Тип робота: андроид
- Способ управления: автономный
- Задача: преодолеть лестничный пролет
-
После включения питания загружается ЦПУ, которая проводит проверку всех систем.

- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
Что такое роботы и как они работают?
Корпоративный ИИК
- Участник TechTarget
Робот — это тип автоматизированной машины, которая может выполнять определенные задачи практически без вмешательства человека, быстро и точно. Область робототехники, которая занимается проектированием, проектированием и эксплуатацией роботов, значительно продвинулась вперед за последние 50 лет.
Область робототехники, которая занимается проектированием, проектированием и эксплуатацией роботов, значительно продвинулась вперед за последние 50 лет.
IDC определяет робототехнику как один из шести акселераторов инноваций, стимулирующих цифровую трансформацию. Другие включают 3D-печать, когнитивные вычисления, безопасность следующего поколения и виртуальную реальность или дополненную реальность.
Что умеют роботы?
По сути, существует столько различных типов роботов, сколько и задач, которые они должны выполнять. Роботы могут выполнять некоторые задачи лучше, чем люди, но другие лучше оставить людям, а не машинам.
Следующие вещи роботы делают лучше, чем люди:
- Автоматизируйте ручные или повторяющиеся действия в корпоративных или промышленных условиях.
- Работайте в непредсказуемых или опасных условиях, чтобы выявлять такие опасности, как утечки газа.
- Обрабатывать и доставлять отчеты для обеспечения безопасности предприятия.
- Заполнение фармацевтических рецептов и подготовка капельниц.
- Доставляйте онлайн-заказы, обслуживание номеров и даже пакеты с едой в экстренных случаях.
- Помощь во время операций.
- Роботы также могут воспроизводить музыку, отслеживать береговую линию в поисках опасных хищников, помогать в поиске и спасении и даже помогать в приготовлении пищи.
Несмотря на растущую повсеместность, использование роботов имеет ряд недостатков.
Могут, например:
- проводить операции, но не успокаивать испуганных пациентов;
- чувствуют скрытые шаги в закрытой зоне, но не принимают мер против незваных гостей;
- проводить занятия для пожилых людей, но не облегчить их одиночество;
- помогают медикам с диагнозами, но не сопереживают больным; и
- учиться на данных, но неправильно реагировать на непредвиденные ситуации.
Все более сложные возможности роботов в конечном итоге устранят некоторые человеческие задачи, но не все. Современные технологии робототехники могут автоматизировать только 25% задач в непредсказуемых, зависящих от человека областях, таких как строительство и уход за больными. Но роботы зависят от человеческого программирования — и (скорее всего) так будет всегда.
Современные технологии робототехники могут автоматизировать только 25% задач в непредсказуемых, зависящих от человека областях, таких как строительство и уход за больными. Но роботы зависят от человеческого программирования — и (скорее всего) так будет всегда.
Типы роботов
Разных типов роботов столько же, сколько задач.
1. Андроиды
Андроиды — это роботы, похожие на людей. Они часто мобильны, передвигаются на колесах или гусеничном ходу. По данным Американского общества инженеров-механиков, эти роботы-гуманоиды используются в таких областях, как уход и личная помощь, поиск и спасение, исследование и исследование космоса, развлечения и образование, связи с общественностью и здравоохранение, а также производство. По мере роста количества вариантов использования и приложений рынок Android к 2026 году достигнет 13 миллиардов долларов9.0014
2. Телечир
Телехир — это сложный робот, которым дистанционно управляет человек-оператор системы телеприсутствия. Это дает этому человеку ощущение присутствия в отдаленной, опасной или чужой среде и позволяет ему взаимодействовать с ней, поскольку телехир постоянно обеспечивает сенсорную обратную связь.
Это дает этому человеку ощущение присутствия в отдаленной, опасной или чужой среде и позволяет ему взаимодействовать с ней, поскольку телехир постоянно обеспечивает сенсорную обратную связь.
3. Робот телеприсутствия
Робот телеприсутствия имитирует опыт и некоторые возможности физического присутствия в определенном месте. Он сочетает в себе удаленный мониторинг и управление с помощью телеметрии, передаваемой по радио, проводам или оптическим волокнам, и позволяет проводить удаленные бизнес-консультации, здравоохранение, домашний мониторинг, уход за детьми и многое другое.
Роботизированная хирургическая система da Vinci позволяет хирургам управлять миниатюрными хирургическими инструментами, установленными на роботизированных руках, с помощью другой руки с увеличенной 3D-камерой. Камера позволяет врачам видеть участок, когда они манипулируют инструментами с помощью основных элементов управления, управляемых пальцами.4. Промышленный робот
IFR (Международная федерация робототехники) определяет промышленного робота как «перепрограммируемый многоцелевой манипулятор с автоматическим управлением, программируемый по трем или более осям». Пользователи также могут адаптировать этих роботов для различных приложений. Сочетание этих роботов с искусственным интеллектом помогло предприятиям перейти от простой автоматизации к более сложным задачам более высокого уровня.
Пользователи также могут адаптировать этих роботов для различных приложений. Сочетание этих роботов с искусственным интеллектом помогло предприятиям перейти от простой автоматизации к более сложным задачам более высокого уровня.
По данным IFR, в 2019 году во всем мире было установлено более 390 000 промышленных роботов, причем лидируют Китай, Япония и США.
В промышленных условиях такие роботы могут делать следующее:
- оптимизировать производительность процесса;
- автоматизировать производство для повышения производительности и эффективности;
- ускорить разработку продукта;
- повысить безопасность; и
- более низкие затраты.
5. Рой роботов
Роевые роботы (также известные как роботы-насекомые) работают группами от нескольких до тысяч, и все они находятся под наблюдением одного диспетчера. Эти роботы аналогичны колониям насекомых в том, что они демонстрируют простое поведение по отдельности, но демонстрируют более сложное поведение со способностью выполнять сложные задачи в целом.
6. Умный робот
Это самый продвинутый вид роботов. Умный робот имеет встроенную систему искусственного интеллекта, которая учится на своей среде и опыте, чтобы накапливать знания и расширять возможности для постоянного совершенствования. Умный робот может сотрудничать с людьми и помогать решать проблемы в следующих областях:
- нехватка рабочей силы в сельском хозяйстве;
- пищевые отходы;
- изучение морских экосистем;
- организация продукции на складах; и
- расчистка завалов от зон бедствия.
Общие характеристики роботов
Не все роботы похожи на HAL 9000 в 2001: Космическая одиссея или BigDog — четвероногий робот для пересеченной местности со сложными датчиками, гироскопами и гидравлическими приводами — от Boston Dynamics. У некоторых есть человеческие черты (андроиды), а у других полностью механические конечности (PackBot). Третьи выглядят как брелки (тамагочи) или крутящиеся игрушки (румба).
У некоторых есть человеческие черты (андроиды), а у других полностью механические конечности (PackBot). Третьи выглядят как брелки (тамагочи) или крутящиеся игрушки (румба).
Тем не менее, все роботы имеют некоторые общие характеристики, такие как следующие:
- механическая конструкция
- электрические компоненты
- компьютерное программирование
По мере развития ИИ и программного обеспечения роботы будут становиться умнее, эффективнее и будут решать более сложные задачи.
Роботизированная автоматизация процессов и интеллектуальная автоматизация процессов
Технология роботизированной автоматизации процессов (RPA) включает проектирование, развертывание и использование программных роботов для выполнения следующих задач:
- автоматизировать бизнес-процессы на основе правил;
- оптимизировать операции предприятия;
- сэкономить человеческие усилия; и
- более низкие затраты.

RPA автоматизирует повторяющиеся задачи, чтобы человеческий персонал мог сосредоточиться на более важной работе. Варианты использования могут быть простыми (автоматические ответы по электронной почте) или сложными (автоматизация тысяч заданий).
RPA — это ступенька к более совершенной интеллектуальной автоматизации процессов (IPA). IPA добавляет возможности принятия решений, инструменты искусственного интеллекта и когнитивные технологии, такие как обработка естественного языка и машинное обучение.
RPA ведет к созданию более совершенных интеллектуальных систем автоматизации процессов.Роботы и робототехника: краткая история
Пьеса 1921 года, руб. , что означает «Универсальные роботы Россума», чешским писателем Карелом Чапеком впервые было введено слово «робот». Эти роботы были искусственными людьми, а не машинами, и могли думать сами за себя, поэтому они чем-то похожи на современных андроидов. Исаак Азимов сказал, что Чапек внес слово «робот» во все языки, на которых написана научная фантастика. Азимов ввел слово «робототехника» и свои знаменитые «Три закона робототехники» в своем рассказе «Обход».
Исаак Азимов сказал, что Чапек внес слово «робот» во все языки, на которых написана научная фантастика. Азимов ввел слово «робототехника» и свои знаменитые «Три закона робототехники» в своем рассказе «Обход».
Первые роботы, хотя в то время их так и не называли, на самом деле появились за несколько столетий до бурных двадцатых. В 1478 году Леонардо да Винчи сконструировал самоходный автомобиль, который до сих пор считается влиятельным в разработке роботов. Хотя эта автономная система так и не прошла чертёжную доску, в 2004 году группа итальянских учёных воспроизвела её дизайн в виде цифровой модели, доказав, что она работает.
Новаторская работа Азимова и да Винчи подготовила почву для последующих событий. В 19В 50 году английский ученый-компьютерщик Алан Тьюринг разработал тест Тьюринга, первоначально называвшийся «Игра в имитацию», заложив основу для дальнейших исследований в области искусственного интеллекта и робототехники.
Тест Тьюринга, разработанный Аланом Тьюрингом, представляет собой метод исследования, позволяющий определить, может ли устройство ИИ (компьютер, робот и т. д.) думать как человек.
д.) думать как человек.
В фильме Стэнли Кубрика « 2001: Космическая одиссея » представлен один из первых в мире роботов с искусственным интеллектом — HAL 9000 9.0130 . HAL может распознавать речь, понимать естественный язык и даже выигрывать в шахматы. Теперь HAL входит в Зал славы Университета Карнеги-Меллона и вдохновляет ученых на поиск способов воспроизвести его возможности, которые представлялись в 1960-х годах.
В 1950-х Джордж К. Девол изобрел перепрограммируемый манипулятор Unimate. Инженер Джозеф Энглебергер приобрел патент Девола на робота и превратил его конструкцию в первого в мире промышленного робота . В конце концов он получил титул «Отец робототехники».
В 1966 году Массачусетский технологический институт разработал одного из первых ботов на основе ИИ, ELIZA, а SRI International позже разработала Shakey, самоуправляемого робота, для специализированных промышленных приложений. К началу 70-х ученые успешно интегрировали ботов в медицину с помощью MYCIN, чтобы помочь идентифицировать бактерии, и компьютерного диагностического инструмента INTERNIST-1. В 1980-х годах была разработана ALVINN, технология робототехники, которая используется в современных беспилотных автомобилях.
В 1980-х годах была разработана ALVINN, технология робототехники, которая используется в современных беспилотных автомобилях.
К 1990-м годам потребительские боты появились в виде компьютерных игр, таких как Тамагочи. После 2000 года интерес к роботам и робототехнике взорвался с выпуском SmarterChild, запрограммированного бота в AOL Instant Messenger, который теперь считается предшественником искусственного интеллекта Siri от Apple.
В начале 2000-х были изобретены PackBot, военный робот, и Stanley, автомобильный бот , . Примечательно, что PackBot сыграл важную роль в ликвидации последствий терактов 11 сентября, поскольку службы быстрого реагирования отправили робота в завалы для поиска жертв и оценки структурной целостности обломков. PackBot прислал фотографии из труднодоступных мест, помогая в спасательных работах.
Стэн — робот, который самостоятельно перемещает транспортные средства в целях логистики.PackBot вдохновил новую эру робототехники, ускорив разработку более совершенных автономных машин, которые теперь помогают в следующих областях:
- управление стихийными бедствиями
- правоохранительные органы
- прогноз погоды
- жилищная гигиена
- военная разведка
Позже домашние роботы, такие как Roomba, и роботы на основе искусственного интеллекта, такие как Siri и Alexa, проложили путь роботам в повседневной жизни людей, расширив их потенциал.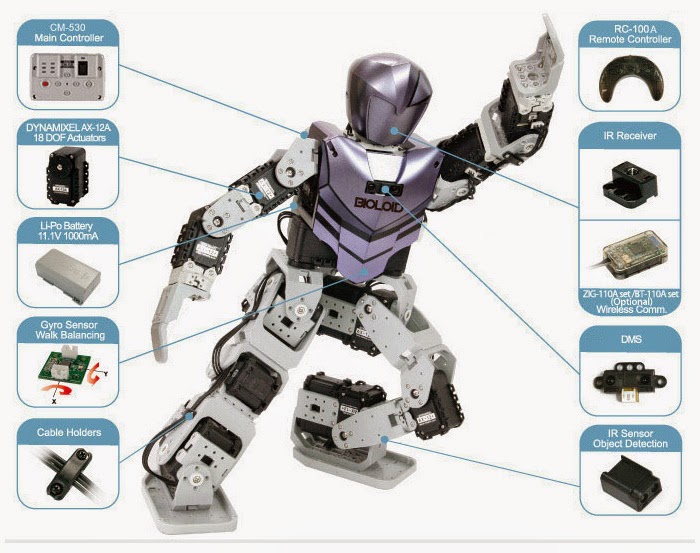
Сегодняшние роботы могут выполнять ряд сложных задач, которые еще полвека назад списали бы как научную фантастику. Умные, интеллектуальные роботы теперь сотрудничают с людьми и помогают решать проблемы, которые в прошлом казались неразрешимыми.
См. также: Нанотехнологии, сверхъестественная долина, робот телеприсутствия и робототехника
Последнее обновление: май 2021 г.
Продолжить чтение О роботе
- Понимание разницы между RPA и ИИ
- Как можно использовать ИИ в сельском хозяйстве: области применения и преимущества
- Робототехника IoT предотвращает опасности на производстве и в здравоохранении
- Робототехническая компания Berkshire Grey станет публичной
- Как Amazon запустил индустрию складской робототехники
Копните глубже в бизнес-стратегии ИИ
-
социальный робот
Автор: Айви Вигмор
-
Comau, Ericsson, тестовая фабрика TIM будущего благодаря нарезке сетей 5G
Автор: Джо О’Халлоран
-
робот телеприсутствия
Автор: Айви Вигмор
-
экономика роботов
Автор: Айви Вигмор
Бизнес-аналитика
-
ThoughtSpot представляет новый инструмент, интегрирующий LLM OpenAI
Поставщик аналитики представил множество новых возможностей, в том числе Sage, которая объединяет технологию генеративного искусственного интеллекта OpenAI .
 ..
.. -
SAS инвестирует второй миллиард долларов в расширенную аналитику и искусственный интеллект
Вложив 1 миллиард долларов в модернизацию своей аналитической платформы Viya и разработку отраслевых систем, поставщик продвигается вперед…
-
Tableau добавит генеративный ИИ с Einstein GPT от Salesforce
Поставщик BI обнародовал планы по объединению существующих возможностей с генеративным инструментом искусственного интеллекта материнской компании, чтобы сделать его более …
ИТ-директор
-
FTC изучает конкуренцию в сфере облачных вычислений
Федеральная торговая комиссия изучает влияние нескольких крупных технологических компаний, таких как Amazon, Microsoft и Google …
-
Долговой кризис в США может сильно ударить по государственным подрядчикам
Государственные подрядчики должны готовиться к тому, что США объявят дефолт по своему долгу, что приведет, среди прочего, к остановке платежей .
 ..
.. -
Виртуальные стили лидерства: трансформационный против транзакционного
Различия между трансформационным и транзакционным стилями руководства имеют значение для виртуальных команд. Руководители и менеджеры…
Управление данными
-
Informatica World 2023: облако, данные и ИИ вместе
Informatica запустила генеративный продукт AI Claire GPT и планирует предложить Intelligent Data Management Cloud в качестве Microsoft …
-
Informatica раскрывает план по внедрению в Клэр генеративного ИИ
Давний независимый поставщик планирует дополнить свой существующий механизм искусственного интеллекта генеративным искусственным интеллектом, чтобы упростить управление данными, позволив…
-
Сетка данных помогает демократизации с децентрализацией
Аналитика в реальном времени позволяет быстрее принимать решения и делать выводы.
 По мере того, как важность демократизации данных возрастает, сетка данных помогает …
По мере того, как важность демократизации данных возрастает, сетка данных помогает …
ЭРП
-
Rootstock добавляет аналитику в SaaS ERP на базе Salesforce
Компания
Rootstock добавила аналитику и новые финансовые инструменты в свою производственную облачную ERP-систему. Платформа SaaS, построенная на платформе Salesforce, …
-
3D-печать имеет сложные отношения с устойчивостью
3D-печать обещает некоторые преимущества в области устойчивого развития, в том числе создание более легких деталей и более коротких цепочек поставок, но в целом …
-
Что добавление аналитической платформы принятия решений может сделать для ERP
Том Оливер, представитель поставщика ИИ, преподает аргументы в пользу технологии принятия решений как решения проблем, связанных с хранением данных …
Робот | Определение, история, использование, типы и факты
человекоподобный робот
Просмотреть все материалы
- Ключевые люди:
- Родни Брукс
- Похожие темы:
- реабилитационный робот три закона робототехники андроид AIBO механический манипулятор
Просмотреть весь связанный контент →
Последние новости
27 апреля 2023 г.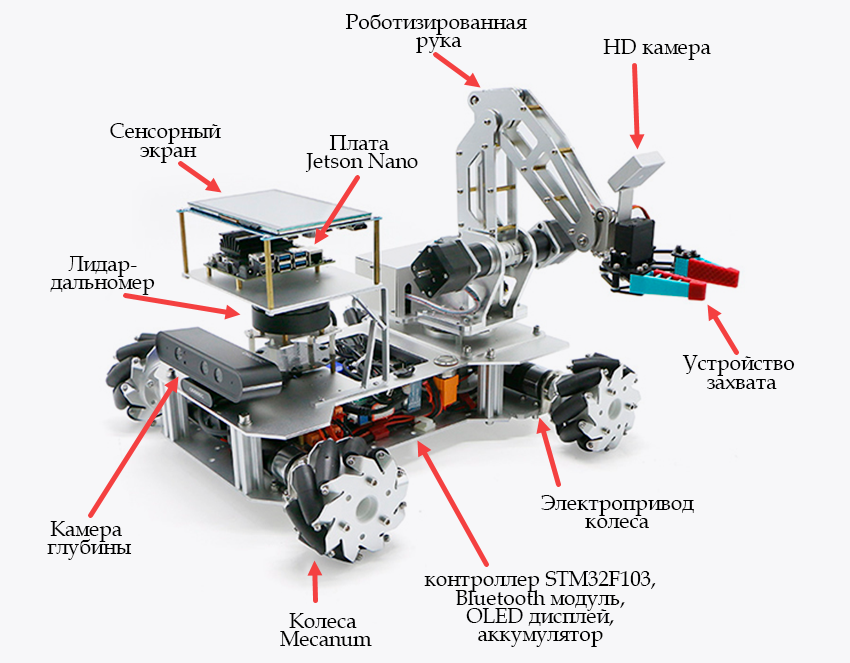 , 16:05 по восточноевропейскому времени (AP)
, 16:05 по восточноевропейскому времени (AP)
Роботы заправляют шоу, пока швейцарское радио тестирует голоса ИИ в течение дня
Слушатели необычной швейцарской общественной радиостанции неоднократно получали сообщение: сегодняшнее программирование принесено вам искусственным интеллектом
26 апреля 2023 г., 12:01 по восточноевропейскому времени (AP)
Никто не водит это такси. Что может пойти не так?
Репортер Ассошиэйтед Пресс вспоминает, как впервые сел в машину, не садясь за руль по-человечески. В более широком смысле робототехника — это инженерная дисциплина, занимающаяся проектированием, строительством и эксплуатацией роботов.
Понятие об искусственных людях появилось раньше письменной истории ( см. автомат), но современный термин робот происходит от чешского слова robota («принудительный труд» или «крепостной»), использованного в пьесе Карела Чапека R. U.R. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из романа Мэри Шелли « Франкенштейн 9».0130 (1818 г.) или механический не был указан, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
U.R. (1920). Роботы в пьесе были созданы людьми, бессердечно эксплуатируемыми владельцами фабрик, пока они не восстали и в конечном итоге не уничтожили человечество. Были ли они биологическими, как монстр из романа Мэри Шелли « Франкенштейн 9».0130 (1818 г.) или механический не был указан, но механическая альтернатива вдохновила поколения изобретателей на создание электрических гуманоидов.
Узнайте о трех законах робототехники Айзека Азимова
Просмотреть все видео к этой статьеСлово робототехника впервые появилось в научно-фантастическом рассказе Айзека Азимова Runaround (1942). Наряду с более поздними рассказами Азимова о роботах он установил новый стандарт правдоподобия в отношении вероятной сложности разработки разумных роботов и технических и социальных проблем, которые могут возникнуть. Runaround также содержал знаменитые Три закона робототехники Азимова:
-
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
-
2. Робот должен подчиняться приказам, отдаваемым ему людьми, за исключением случаев, когда такие приказы противоречат Первому закону.
-
3. Робот должен защищать свое существование до тех пор, пока такая защита не противоречит Первому или Второму закону.
В этой статье прослеживается развитие роботов и робототехники. Дополнительную информацию о промышленном применении см. в статье по автоматизации.
Посмотрите, как мехатроника помогает инженерам создавать высокотехнологичные продукты, такие как промышленные роботы
Посмотреть все видео к этой статье Машины с гибким поведением и некоторыми физическими свойствами, хотя и не гуманоидные, были разработаны для промышленности. Первым стационарным промышленным роботом был программируемый Unimate, гидравлическая тяжелая рука с электронным управлением, которая могла повторять произвольные последовательности движений. Он был изобретен в 1954 американским инженером Джорджем Деволом и был разработан компанией Unimation Inc. , основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
, основанной в 1956 году американским инженером Джозефом Энгельбергером. В 1959 году прототип Unimate был представлен на литейном заводе General Motors Corporation в Трентоне, штат Нью-Джерси. В 1961 году Condec Corp. (после покупки Unimation в предыдущем году) поставила на завод GM первого в мире робота для производственной линии; у него была неприятная (для людей) задача по удалению и укладке горячих металлических деталей из машины для литья под давлением. Оружие Unimate продолжает разрабатываться и продаваться лицензиатами по всему миру, при этом автомобильная промышленность остается крупнейшим покупателем.
Узнайте, как использование роботизированного конвейера для генетики бактерий делает работу ученых в Университетском колледже Корка менее сложной и более эффективной.
Просмотреть все видео к этой статье В в конце 1960-х и 1970-х годах в Массачусетском технологическом институте (MIT) и в Стэнфордском университете, где они использовались с камерами в исследованиях роботизированных рук и глаз. Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Виктор Шейнман из Стэнфорда, работая с Unimation для GM, разработал первую такую руку, используемую в промышленности. Называется PUMA (программируемая универсальная машина для сборки), они используются с 1978 для сборки автомобильных компонентов, таких как приборные панели и фары. PUMA широко копировалась, и ее потомки, большие и маленькие, до сих пор используются для легкой сборки в электронике и других отраслях промышленности. С 1990-х годов небольшие электрические манипуляторы стали важными инструментами в лабораториях молекулярной биологии, поскольку они точно манипулируют массивами пробирок и пипетируют сложные последовательности реагентов.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту.
Подписаться сейчас
Мобильные промышленные роботы также впервые появились в 1954 году. В том же году беспилотная электрическая тележка производства Barrett Electronics Corporation начала возить грузы по продуктовому складу в Южной Каролине.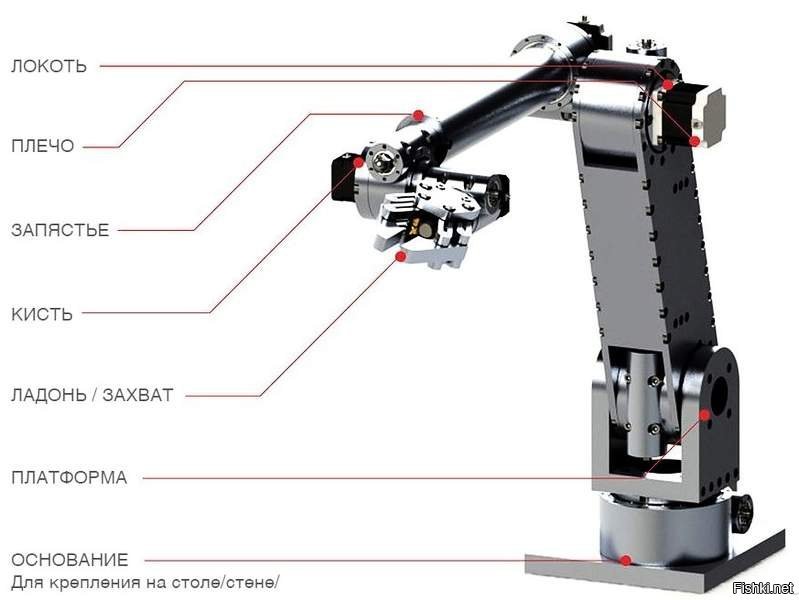 Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 19В 90-х годах для использования на складах стал популярен новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от неподвижных ретрорефлекторов (не менее трех из которых должны быть видны из любого места).
Такие машины, получившие название AGV (автоматически управляемые транспортные средства), обычно перемещаются по излучающим сигналы проводам, проложенным в бетонных полах. В 1980-х годах AGV приобрели микропроцессорные контроллеры, которые обеспечивали более сложное поведение, чем те, которые обеспечиваются простым электронным управлением. В 19В 90-х годах для использования на складах стал популярен новый метод навигации: AGV, оснащенные сканирующим лазером, триангулируют свое положение, измеряя отражения от неподвижных ретрорефлекторов (не менее трех из которых должны быть видны из любого места).
Хотя промышленные роботы впервые появились в США, бизнес там не процветал. Unimation была приобретена Westinghouse Electric Corporation в 1983 году и через несколько лет закрылась. Cincinnati Milacron, Inc., другой крупный американский производитель гидравлических манипуляторов, продал свое подразделение робототехники в 1919 году.90 шведской фирме Asea Brown Boveri Ltd. Adept Technology, Inc. , отделившаяся от Стэнфорда и Unimation для производства электрического оружия, является единственной оставшейся американской фирмой. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на поле. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 19В 80-е годы Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала принятию заменителей роботов, при этом в 2001 году число промышленных роботов в Европейском союзе впервые превысило число установок в Японии.
, отделившаяся от Стэнфорда и Unimation для производства электрического оружия, является единственной оставшейся американской фирмой. Иностранные лицензиаты Unimation, особенно в Японии и Швеции, продолжают работать, а в 1980-х годах другие компании в Японии и Европе начали активно выходить на поле. Перспектива старения населения и связанная с этим нехватка рабочих рук побудили японских производителей экспериментировать с передовой автоматизацией еще до того, как она принесла явную отдачу, открыв рынок для производителей роботов. К концу 19В 80-е годы Япония, возглавляемая подразделениями робототехники Fanuc Ltd., Matsushita Electric Industrial Company, Ltd., Mitsubishi Group и Honda Motor Company, Ltd., была мировым лидером в производстве и использовании промышленных роботов. Высокая стоимость рабочей силы в Европе также способствовала принятию заменителей роботов, при этом в 2001 году число промышленных роботов в Европейском союзе впервые превысило число установок в Японии.
Отсутствие надежной функциональности ограничило рынок промышленных и сервисных роботов в офисе и дома).
