Как устроен электродвигатель и как он работает. Какие бывают типы электродвигателей. В чем особенности двигателей постоянного и переменного тока. Как создается вращающий момент в электромоторе. Где применяются разные виды электродвигателей.
Принцип работы и устройство электродвигателя
Электродвигатель — это устройство, преобразующее электрическую энергию в механическую работу, как правило, во вращательное движение вала. Его работа основана на явлении электромагнитной индукции.
Основные компоненты электродвигателя:
- Статор — неподвижная часть, создающая магнитное поле
- Ротор — вращающаяся часть с обмотками или постоянными магнитами
- Коммутатор — устройство для изменения направления тока в обмотках ротора
- Щетки — для подвода тока к ротору через коммутатор
При подаче электрического тока в обмотки статора и ротора возникает взаимодействие магнитных полей, создающее вращающий момент. Как это происходит?
Создание вращающего момента
Когда по проводнику с током, помещенному в магнитное поле, протекает электрический ток, на него действует сила Ампера. Эта сила стремится повернуть проводник перпендикулярно линиям магнитного поля. В электродвигателе это приводит к вращению ротора.
Для поддержания вращения необходимо периодически менять направление тока в роторных обмотках. Эту функцию выполняет коммутатор в двигателях постоянного тока. В двигателях переменного тока направление тока меняется автоматически.
Классификация электродвигателей
Существует множество типов электродвигателей, различающихся по принципу действия, питающему току и конструкции. Основные виды:
- Двигатели постоянного тока
- Двигатели переменного тока:
- Асинхронные
- Синхронные
- Шаговые двигатели
- Линейные двигатели
- Вентильные двигатели
Двигатели постоянного тока: устройство и принцип работы
Двигатели постоянного тока (ДПТ) работают от источника постоянного напряжения. Их основные компоненты:
- Статор с постоянными магнитами или электромагнитами
- Ротор (якорь) с обмотками
- Коллектор для переключения тока в обмотках ротора
- Щетки для подвода тока к коллектору
Как работает ДПТ?
- Постоянный ток подается на обмотки статора, создавая постоянное магнитное поле
- Ток через щетки и коллектор поступает в обмотки ротора
- Взаимодействие магнитных полей статора и ротора создает вращающий момент
- При вращении ротора коллектор переключает направление тока в его обмотках
- Это поддерживает непрерывное вращение в одном направлении
ДПТ обладают высоким пусковым моментом и легко управляются по скорости. Их недостатки — наличие щеточно-коллекторного узла, требующего обслуживания.

Асинхронные двигатели переменного тока
Асинхронные двигатели — самый распространенный тип электродвигателей. Они питаются от сети переменного тока. Их особенности:
- Простая и надежная конструкция
- Отсутствие коллектора и щеток
- Высокий КПД
- Скорость вращения ротора отстает от скорости вращения магнитного поля статора
Как работает асинхронный двигатель?
- Переменный ток в обмотках статора создает вращающееся магнитное поле
- Это поле индуцирует токи в обмотках ротора
- Взаимодействие наведенных токов с полем статора создает вращающий момент
- Ротор вращается, но его скорость всегда меньше скорости поля статора
Асинхронные двигатели широко применяются в промышленности благодаря простоте и надежности.
Синхронные электродвигатели: принцип действия
Синхронные двигатели также работают от переменного тока, но их ротор вращается синхронно с магнитным полем статора. Их особенности:
- Постоянная скорость вращения, не зависящая от нагрузки
- Высокий КПД
- Возможность работы с опережающим коэффициентом мощности
Принцип работы синхронного двигателя:

- Переменный ток создает вращающееся магнитное поле статора
- Ротор с постоянными магнитами или электромагнитом создает свое магнитное поле
- Поля статора и ротора сцепляются, вращаясь синхронно
- Ротор вращается с той же скоростью, что и поле статора
Синхронные двигатели применяются там, где нужна точная постоянная скорость вращения.
Применение различных типов электродвигателей
Выбор типа электродвигателя зависит от конкретной задачи. Где применяются разные виды?
- Двигатели постоянного тока: электротранспорт, станки с ЧПУ, сервоприводы
- Асинхронные двигатели: насосы, вентиляторы, компрессоры, конвейеры
- Синхронные двигатели: генераторы, приводы прокатных станов, мощные компрессоры
- Шаговые двигатели: 3D-принтеры, позиционирующие устройства
- Вентильные двигатели: бытовая техника, электроинструмент
Правильный выбор типа электродвигателя обеспечивает оптимальную работу оборудования и экономию энергии.
Энергоэффективность современных электродвигателей
Современные электродвигатели достигают высокой энергоэффективности. Как этого добиваются производители?

- Применение новых магнитных материалов с низкими потерями
- Оптимизация конструкции для снижения потерь на вихревые токи
- Использование медных роторов в асинхронных двигателях
- Внедрение систем частотного регулирования
- Применение постоянных магнитов из редкоземельных металлов
Повышение КПД электродвигателей позволяет существенно снизить энергопотребление промышленных предприятий и бытовой техники.
Перспективы развития электродвигателей
Каковы основные направления совершенствования электродвигателей?
- Разработка двигателей на высокотемпературных сверхпроводниках
- Создание компактных высокомоментных двигателей для электротранспорта
- Интеграция двигателей с силовой электроникой и системами управления
- Применение новых композитных материалов
- Разработка линейных двигателей для высокоскоростного транспорта
Развитие технологий электродвигателей открывает новые возможности в промышленности, транспорте и бытовой технике, способствуя повышению энергоэффективности и снижению воздействия на окружающую среду.

Как работают двигатели постоянного и переменного тока
Содержание
- Принцип работы электродвигателя
- Устройство и принцип действия электродвигателя постоянного тока
- Классификация электродвигателей
- Двигатели постоянного тока
- Двигатели пульсирующего тока
- Двигатели переменного тока (ПТ)
- Универсальный коллекторный электродвигатель (УКД)
- Синхронный электродвигатель возвратно-поступательного движения
- Использование асинхронных двигателей в однофазной цепи
- УКД: принцип работы и характеристики
- Синхронный принцип работы электродвигателя
- Электродвигатель у бактерий
- Формула мощности трехфазного двигателя
- Видео
- Принцип работы электродвигателя
- Как устроен классический электродвигатель
- Основные типы электродвигателей
- Особенности работы электромоторов постоянного тока
- Принцип работы электродвигателя переменного тока
- Как действуют асинхронные электромоторы
- Конструкция асинхронного двигателя
- Принцип действия и устройство электродвигателя
- Видео
Принцип работы электродвигателя
Одними из основных потребителей электроэнергии на производстве являются электромоторы. Электрический ток, поданный на такую машину, заставляет её работать. Это явление превращения электричества во вращение вала двигателя в сотни раз повысило эффективность технологического процесса. Как устроены электродвигатели, станет понятно после изучения их устройства.
Электрический ток, поданный на такую машину, заставляет её работать. Это явление превращения электричества во вращение вала двигателя в сотни раз повысило эффективность технологического процесса. Как устроены электродвигатели, станет понятно после изучения их устройства.
Устройство и принцип действия электродвигателя постоянного тока
Машины, осуществляющие свою работу при присоединении к ним тока, не меняющего свою полярность, называют машинами постоянного тока. Они превращают электричество в механическую энергию.
Принцип работы электродвигателя всякой конструкции опирается на использование закона электромагнитной индукции и явления самоиндукции.
Информация. В замкнутом контуре или рамке, помещённой в магнитное поле (МП) постоянных магнитов, возникает электродвижущая сила (ЭДС). Это происходит в результате пронизывания рамки электромагнитными линиями МП, если крутить магниты или саму рамку.
В основе работы электродвигателя лежит образование крутящего момента при подаче напряжения на катушки якоря. Его ещё называют синхронным двигателем постоянного тока (ДПТ). Устройство простейшей машины вмещает в себя:
Его ещё называют синхронным двигателем постоянного тока (ДПТ). Устройство простейшей машины вмещает в себя:
Внимание! У такого двигателя две «мёртвые точки» (крайние положения). В этих точках невозможно самозапускание, а крутящий момент такого ДПТ неравномерен.
Статор, он же – индуктор, располагает в основном двумя парами основных полюсов. В случае необходимости на нём устанавливают добавочные. Это улучшает переключение на коллекторе якоря.
Ротор, он же – якорь, должен иметь как минимум три зубца, чтобы двигатель мог сам запускаться из каждой точки. При этом в зону подключения стабильно попадает один из зубцов.
На щёточно-коллекторный узел выведены все катушки якоря, какие есть. Коллектор является кольцом из изолированных ламелей (пластин), размещённых по длине оси ротора. По ним скользят щётки и подают или снимают напряжение.
Важно! Двигатель вращается благодаря силе Ампера, которая действует на проводник, находящийся в МП, когда в нём протекает электрический ток. При этом источник тока должен поддерживать его неизменное значение.
При этом источник тока должен поддерживать его неизменное значение.
Все ДПТ обладают свойствами саморегулирования, поддерживая вращающий момент равным моменту сопротивления на валу. Это происходит автоматически, и частота вращения постоянна.
Классификация электродвигателей
Электрические машины можно разбить на две группы, обращая внимание на особенности образования момента вращения: магнитоэлектрические и гистерезисные. Вторая группа применяется редко, у них вращение происходит за счёт перемагничивания ротора.
Магнитоэлектрические моторы подразделяются по роду тока на модели:
Универсальными моторы называются, потому что могут потреблять для работы, как постоянный, так и переменный ток.
Двигатели постоянного тока
Несмотря на то, что такие моторы могут питаться, как постоянным, так и переменным током, в основном на их обмотки подают постоянное напряжение.
Внимание! Способ переключения фаз позволяет разделять ДПТ на коллекторные и вентильные. Присутствие обратных связей по току, напряжению и скорости допускает наличие регулируемого электропривода.
Присутствие обратных связей по току, напряжению и скорости допускает наличие регулируемого электропривода.
Коллекторные машины имеют проблемное место: щёточно-коллекторный узел (ЩКУ), который создаёт сложность в облуживании и некоторую ненадёжность в работе.
Вентильные электромоторы лишены коллектора, фазы переключает инвертор (электронный блок). У таких машин возможна обратная связь через датчик позиции ротора.
Двигатели пульсирующего тока
Подобные аппараты используются на электровозах. Питание мотора осуществляется от пульсирующего тока. От ДПТ их конструктивно отличает следующее:
К сведению. Такой ток получается в результате сложения двух токов: постоянного и переменного, потому имеет обе составляющие. Он не меняет направления, а пульсирует, кратковременно меняя значения от максимума до минимума и не во всех случаях до нуля.
Двигатели переменного тока (ПТ)
По способу работы такие машины делятся на двигатели: синхронные и асинхронные.
Почему синхронные? Потому что скорость ротора и скорость вращающегося в статоре МП абсолютно совпадают. У асинхронных моторов скорость вращения МП в статоре выше, чем у ротора.
Универсальный коллекторный электродвигатель (УКД)
Такой тип применяется в электроинструментах: это отрезная машинка, дрель, триммер и др. Незаменим там, где нужны высокие обороты (выше 3000 об./мин.), маленькие размеры и небольшой вес. Двигатель работает от обоих видов тока и обладает последовательно включённой обмоткой возбуждения. В электронную схему входит линейный преобразователь напряжения.
Внимание! При использовании постоянного тока напряжением 220В обмотка возбуждения подключается полностью, при переменном токе и аналогичном напряжении включение частичное.
Синхронный электродвигатель возвратно-поступательного движения
Принцип действия электродвигателя заключается в том, что на штоке, который движется, установлены магниты постоянной природы.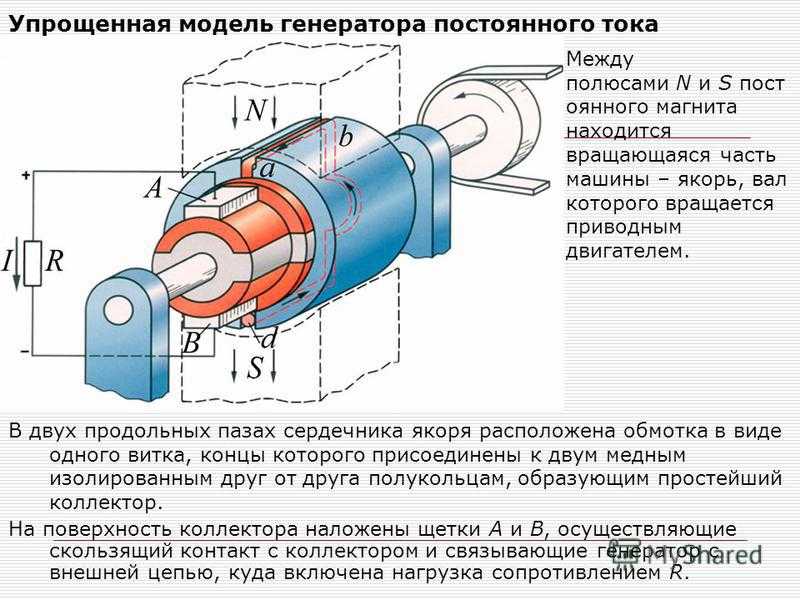 В корпус мотора вмонтирован магнитопровод с катушками, на которые подаётся ПТ. Катушки установлены так, что создаваемое ими МП заставляет двигаться шток туда-сюда.
В корпус мотора вмонтирован магнитопровод с катушками, на которые подаётся ПТ. Катушки установлены так, что создаваемое ими МП заставляет двигаться шток туда-сюда.
Использование асинхронных двигателей в однофазной цепи
Отличительной чертой при запуске такого мотора является ручное включение. Это вызвано наличием пусковой обмотки или фазосдвигающей цепи. В отличие от трёхфазного собрата, который запускается автоматически, за счёт сдвига трёх фаз, однофазному нужен начальный толчок.
К сведению. Можно включить и трёхфазный асинхронный мотор в сеть 220 В. При этом обмотки соединяются в «звезду» или «треугольник». Концы двух обмоток подсоединяют к сети, конец третьей – через последовательно присоединённый пусковой конденсатор большой ёмкости кратковременно (во избежание сгорания) подключают к одной из них.
Чтобы повысить мощность электродвигателя, формула которого включает в себя cosϕ, коэффициент мощности, следовательно, и коэффициент полезного действия (КПД), в цепь включают рабочую ёмкость.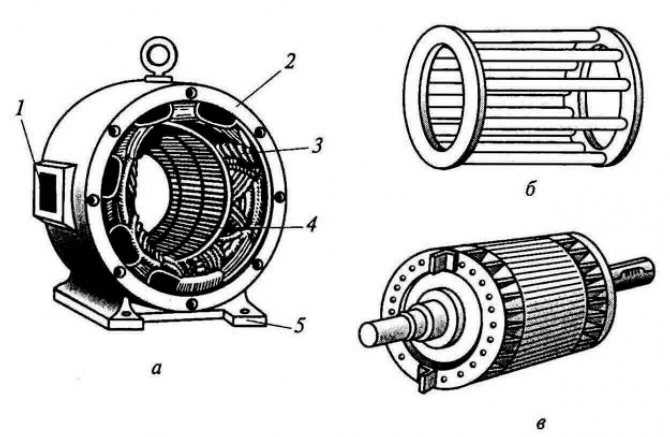 Она включена постоянно. Так, трёхфазный двигатель на 2 квт, при включении подобным образом, будет отдавать только 45-60% заявленной мощности. Мощность любого трехфазного двигателя по формуле вычислить несложно.
Она включена постоянно. Так, трёхфазный двигатель на 2 квт, при включении подобным образом, будет отдавать только 45-60% заявленной мощности. Мощность любого трехфазного двигателя по формуле вычислить несложно.
УКД: принцип работы и характеристики
Это однофазные двигатели, работающие на высоких оборотах при любом типе подводимого электричества.
Ответ на вопрос, почему такое устройство работает от переменного тока, заключается в том, что направление вращающего момента не меняется. Полярность полюсов статора меняется практически одновременно с изменением токового направления в якорной обмотке.
Важно! Для этого применяют последовательное возбуждение двигателя. Следовательно, ток возбуждения и ток якоря – один и тот же.
Потому при смене положительных и отрицательных полупериодов практически одновременно изменяются и ток в якорной обмотке Iа, и магнитный поток Ф.
Синхронный принцип работы электродвигателя
Особенности синхронной работы моторов зависят от того, какой двигатель рассматривается. Они бывают:
Они бывают:
Есть гибридные модели: реактивные с ПМ и реактивно-гистерезисные.
Независимо от того, какие двигатели рассматривать, условие синхронности базируется на взаимодействии МП полюсов индуктора (статора) и МП якоря.
К сведению. Если конструктивное строение обратить (расположить якорь и индуктор наоборот), то синхронный двигатель превращается в генератор.
Двигатель работает следующим образом: постоянный ток прикладывается к обмотке возбуждения (от внешнего источника питания), а переменный – к трёхфазной обмотке якоря. Якорная обмотка создаёт вращающееся МП, которое вступает во взаимосвязь с МП обмотки возбуждения. Результат – электромагнитный момент, вращающий ротор.
Электродвигатель у бактерий
Вращение жгутика у бактерии выполняется молекулярным двигателем. Он состоит из некоторого количества молекул, которые преобразуют электроток, создаваемый движением протонов, в энергию вращения жгутика бактерии.
Формула мощности трехфазного двигателя
Для того чтобы определить мощность двигателя, формула выглядит так:
Составляющие формулы:
Если величина Iн неизвестна, ее нужно найти, применив соответствующую формулу.
Асинхронные двигатели, используемые для трёхфазной сети, – наиболее стабильные и надёжные машины. Однако частотный предел переменного тока 50 Гц не позволяет им развивать скорость вращения более 3000 об./мин. Поэтому универсальные коллекторные ДПТ – эффективный выход для механических процессов, требующих от мотора способности вращать вал с более высокой частотой.
Видео
Источник
Принцип работы электродвигателя
В настоящее время существует множество устройств, способных преобразовывать различные виды энергии. Среди них ведущее место занимают различные типы электродвигателей, преобразующих энергию электрического тока во вращательное движение вала. Механизмы с электродвигателями получили широкое распространение в промышленности и в быту. Для того чтобы наиболее эффективно использовать эти устройства, необходимо понимать принцип работы электродвигателя.
Как устроен классический электродвигатель
Каждый такой агрегат по своей сути является своеобразной технико-механической системой, с основной функцией, направленной на трансформацию электрической энергии во вращательное движение вала. Физическое действие двигателей основано на всем известном явлении электромагнитной индукции. В состав электромотора входят статор и ротор, которые соответственно являются неподвижной и движущейся частью.
Физическое действие двигателей основано на всем известном явлении электромагнитной индукции. В состав электромотора входят статор и ротор, которые соответственно являются неподвижной и движущейся частью.
В стандартных двигателях статор служит их наружной оболочкой, где происходит формирование неподвижных полей, обладающих магнитными свойствами. Роторная конструкция помещается внутри статора. Она включает в себя определенное число постоянных магнитов, сердечник в виде обмоток из проволоки, коллектор и щетки. Ток проходит по этим обмоткам, изготовленным из проводников, расположенных в виде многочисленных витков.
Когда электрический мотор, в том числе и с короткозамкнутым ротором, присоединяется к источнику питания, статорные и роторные поля начинают взаимодействовать между собой. Это приводит к возникновению момента вращения, вызывающего движение роторного вала агрегата. В свою очередь, энергия вращающегося вала подается к рабочему органу всего технического устройства, составной частью которого является тот или иной двигатель.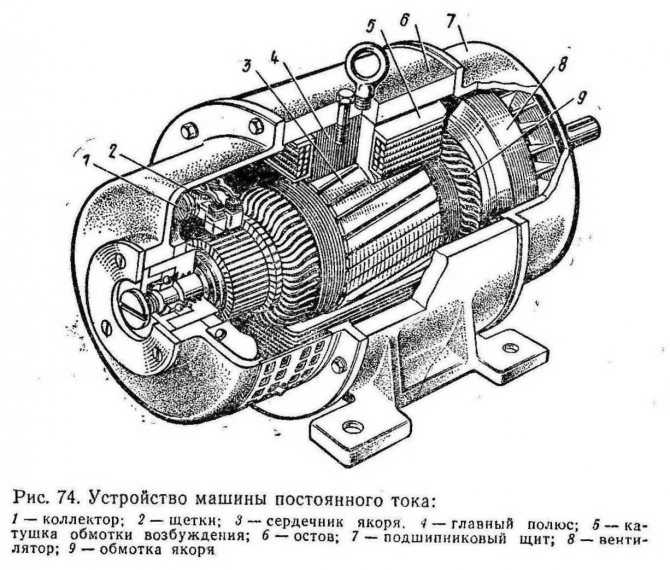
В процессе преобразования электричества в механическое движение, возникают определенные энергетические потери. Это связано с силой трения, намагничиванием сердечников, нагревом проводниковых элементов и другими факторами. На КПД электродвигателя оказывает влияние даже сопротивление воздуха деталям, находящимся в движении.
Тем не менее, благодаря современным технологиям, коэффициент полезного действия агрегатов нового поколения может доходить до 90%. Кроме того, эти устройства отличаются экологической чистотой и высокими эксплуатационными характеристиками.
Основные типы электродвигателей
Существуют различные типы и модификации электрических двигателей, отличающихся типом питания, напряжением, пределом мощности, количеством оборотов в минуту. Они могут быть с фазным или с короткозамкнутым ротором. Эти показатели считаются основными, однако во многих случаях особое значение придается размерам и массе, а также энергетическим показателям.
Классификация основных типов электродвигателей выглядит следующим образом:
Особенности работы электромоторов постоянного тока
Основной действующий принцип работы электродвигателя постоянного тока состоит в следующих процессах. К обмотке возбуждения, называемой также индукторной обмоткой, осуществляется подача постоянного тока. В результате, создается постоянное магнитное поле, используемое для возбуждения. В моторах с использованием постоянных магнитов, создание поля происходит под их воздействием.
К обмотке возбуждения, называемой также индукторной обмоткой, осуществляется подача постоянного тока. В результате, создается постоянное магнитное поле, используемое для возбуждения. В моторах с использованием постоянных магнитов, создание поля происходит под их воздействием.
Поступление постоянного тока происходит и в якорную обмотку. Здесь он попадает под влияние магнитного поля, созданного статором, создавая момент вращения. В результате такого воздействия, ротор совершает поворот на 90 градусов, затем его обмотки вновь коммутируются и вращающиеся движения продолжаются.
Двигатели, работающие на постоянном токе классифицируются в соответствии со способом возбуждения:
Устройство и принцип работы мотора постоянного тока зависит от многих факторов. Если подключение выполнено напрямую, то во время пуска якорный ток многократно превышает номинальное значение. Для выравнивания этих величин в цепь с якорем устанавливается пусковое сопротивление, выполненное в виде реостата. Плавность в время пуска обеспечивается ступенчатой конструкцией этого устройства. На первом этапе оказываются включены все ступени и сопротивление достигает максимального значения.
Плавность в время пуска обеспечивается ступенчатой конструкцией этого устройства. На первом этапе оказываются включены все ступени и сопротивление достигает максимального значения.
По мере того как двигатель разгоняется, возникает сила, противоположная ЭДС. Она постепенно возрастает, а якорный ток снижается за счет последовательного выключения ступеней. Подача электроэнергии на якорь и обмотки возбуждения может быть отрегулирована тиристорными преобразователями, известными как приводы постоянного тока.
Принцип работы электродвигателя переменного тока
Основным отличием этих агрегатов от других устройств считается возможность трансформации электрической энергии в механическую и обратно. Вращательное движение вызывают взаимодействующие магнитные поля. Одно из них относится к категории динамического или вращающегося, а другое считается статическим или постоянным, статическим. В результате их взаимодействия, вал электродвигателя начинает вращаться.
На каждом статоре электромотора наматываются обмотки в количестве трех. К каждой из них соответственно подключаются три фазы. Трехфазный ток характеризуется плавно изменяющимися параметрами напряжения и тока, течение которых имеет вид синусоидального графика. Максимальная мощность в обмотке плавно перетекает из одной ее точки в другую. На концах синусоиды, расположенных на максимальном удалении, значение этой мощности будет наименьшим.
К каждой из них соответственно подключаются три фазы. Трехфазный ток характеризуется плавно изменяющимися параметрами напряжения и тока, течение которых имеет вид синусоидального графика. Максимальная мощность в обмотке плавно перетекает из одной ее точки в другую. На концах синусоиды, расположенных на максимальном удалении, значение этой мощности будет наименьшим.
Когда напряжение с трех фаз подается к обмоткам статора, это приводит к образованию магнитного поля, вращающегося с такой же частотой, как и в сети, то есть, 50 Гц. Внутри статора расположен ротор, в котором также образуется магнитное поле. Оно отталкивается от поля статора и создает момент вращения. В общих чертах это принцип работы большинства аналогичных технических устройств.
Как действуют асинхронные электромоторы
Среди всех агрегатов переменного тока, чаще всего во многих сферах используются асинхронные двигатели трехфазного тока. Общий принцип работы асинхронного мотора очень простой и будет рассмотрен ниже. Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
Их количество составляет примерно 90% от всех выпускаемых изделий этого типа. Данные устройства широко используются в промышленности, на транспорте, в сельском хозяйстве и многих других областях.
Агрегаты асинхронного типа также, как и другие, выпускаются и используются для трансформации переменного тока в механическую работу вала. Если объяснять по-простому, для чайников, понятие асинхронный возникло из-за разницы, возникающей между частотами, с которыми вращаются магнитные поля статоров и роторов. Частота у статора во всех случаях превышает частоту вращения ротора.
Конструкция асинхронного двигателя
В конструкцию асинхронного электродвигателя входят две основные детали – статор и ротор.
Для изготовления статора используются стальные листы, а сам он имеет форму цилиндра. В пазы конструкции укладываются обмотки из медных проводников. Их оси сдвинуты в пространстве относительно друг друга на 120 градусов. Соединение между собой концов каждой обмотки осуществляется по разным вариантам – в виде звезды или треугольником.
Роторные части асинхронных моторов изготавливаются в двух вариантах. В первом случае это изделия с короткозамкнутым ротором, собираемым в форме сердечника из стальных пластинок. В его пазы заливается алюминий в расплавленном виде, что приводит к образованию стержней, коротко замкнутых с торцевыми кольцами. В агрегатах повышенной мощности алюминиевый расплав по технологии заменяется медью.
Второй вариант представляет собой фазный ротор, имеющий такую же трехфазную обмотку, аналогичную обмотке у статора. Как правило, соединение обмоток в этом случае осуществляется звездой, а их свободные концы соединяются с контактными кольцами. Эти же кольца соединяются со щетками, обеспечивающими использование добавочного резистора. Данный элемент уменьшает слишком высокое значение пусковых токов.
Когда к обмотке трехфазного статора подается напряжение, во всех фазах возникает магнитный поток, изменяющийся с такой же частотой, как и в поступающем напряжении. У всех магнитных потоков имеется сдвиг на 120 градусов по отношению друг к другу. В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС.
В результате образуется общий магнитный поток, который и обеспечивает собственное вращение. Он оказывает влияние на проводники роторных обмоток и создает в них ЭДС.
Образовавшийся ток начинает взаимодействовать с магнитным потоком статора, что, в результате, приводит к возникновению пускового момента электромотора. То есть, ротор устремляется к повороту в том же самом направлении, в каком осуществляется вращение магнитного поля статора. После того как пусковой момент превысит тормозной момент ротора, вал двигателя начнет вращаться.
Тяговый электродвигатель: назначение и применение
Виды электродвигателей: устройство, принцип работы
Подключение асинхронного электродвигателя
Схема реверса электродвигателя с магнитным пускателем
Источник
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак).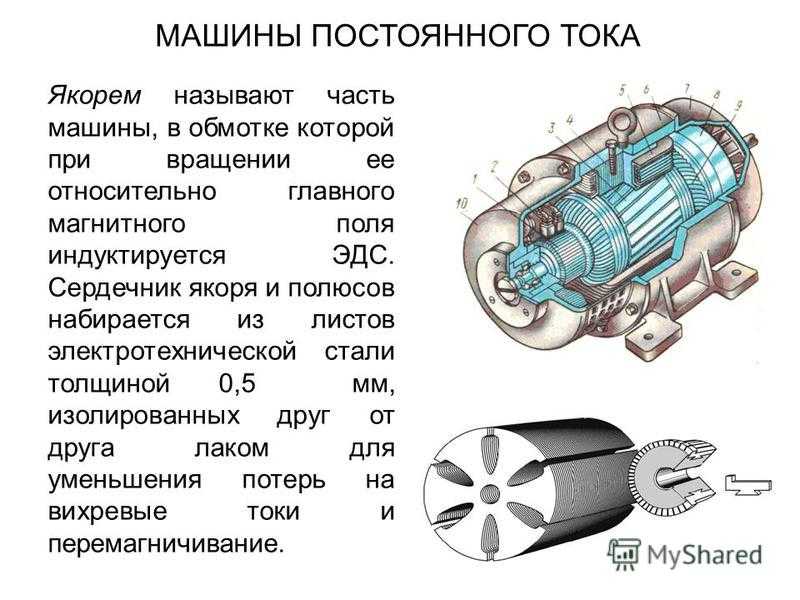 Для их питания напряжение подается от генераторов со знакопеременной величиной.
Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «-».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь.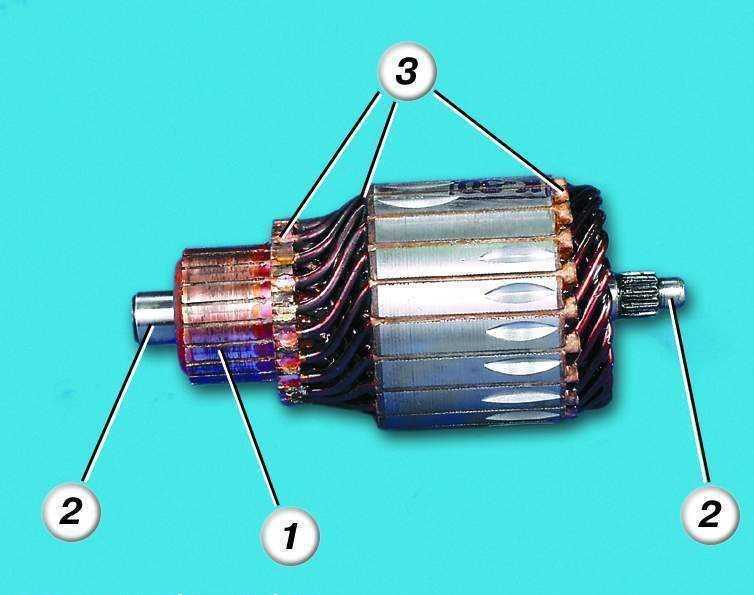 Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.
Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Источник
Видео
Как работают двигатели постоянного и переменного тока (русские субтитры)
Электродвигатель постоянного тока. Принцип работы.
Схема двигателя постоянного тока. Устройство и принцип работы.
Принцип работы бесщеточного двигателя постоянного тока
Как работает ЭЛЕКТРОВОЗ переменного тока простыми словами
Универсальные электродвигатели. Как они работают?
Если подать переменку на двигатель постоянного тока
Синхронный и асинхронный двигатели. Отличия двигателей
Принцип работы синхронного электродвигателя
Как работают ЭЛЕКТРОДВИГАТЕЛИ переменного тока? АСИНХРОННЫЙ и СИНХРОННЫЙ.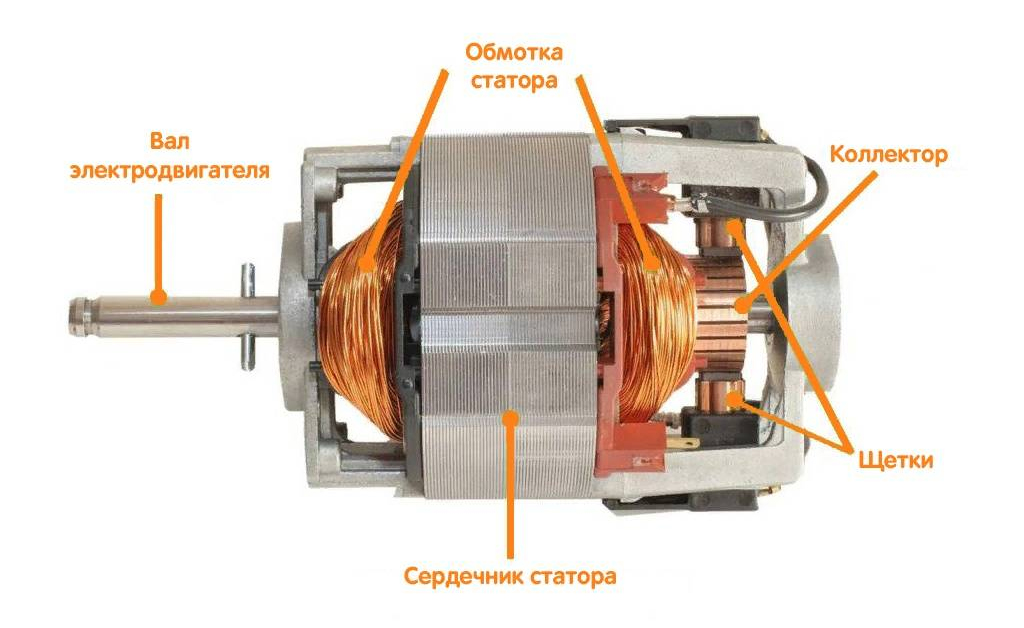 Понятное объяснение!
Понятное объяснение!
Коллекторный электродвигатель постоянного тока
Коллекторный электродвигатель постоянного тока
- Основные параметры электродвигателя постоянного тока
- Характеристики коллекторного электродвигателя постоянного тока
Конструкция коллекторного электродвигателя постоянного тока
Статор — неподвижная часть двигателя.
Индуктор (система возбуждения) — часть коллекторной машины постоянного тока или синхронной машины, создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения. Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Якорь — часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря может выступать как ротор так и статор. В двигателе, показанном на рис. 1, ротор является якорем.
В двигателе, показанном на рис. 1, ротор является якорем.
Щетки — часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания.
Коллектор — часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря [1].
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
- Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
- Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
-
По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
- независимого возбуждения
- последовательного возбуждения
- параллельного возбуждения
- смешанного возбуждения
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
- Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
- Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным.
Двигатель последовательного возбуждения
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (Iв = Iа), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (Iа < Iном) и магнитная система двигателя не насыщена (Ф
Iа), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
,
- где M – момент электродвигателя, Н∙м,
- сМ – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- Ia – ток якоря, А.

С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током Iа и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом Iа практически не увеличивается. График зависимости M=f(Ia) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию [3].
Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
- Преимущества:
- высокий момент на низких оборотах
- отсутствие потерь магнетизма со временем
- Недостатки:
- низкий момент на высоких оборотах
- дороже КДПТ ПМ
- плохая управляемость скоростью из-за последовательного соединения обмоток якоря и индуктора
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от КДПТ ПМ и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от КДПТ ПМ и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль [4].
Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль [4].
- Преимущества:
- хорошие регулировочные свойства
- высокий момент на низких оборотах
- менее вероятен выход из под контроля
- отсутствие потерь магнетизма со временем
- Недостатки:
- дороже других коллекторных двигателей
Двигатель смешанного возбуждения имеет эксплуатационные характеристики двигателей с параллельным и последовательным возбуждением. Он имеет высокий момент на низких оборотах, так же как двигатель последовательного возбуждения и хороший контроль скорости, как двигатель параллельного возбуждения. Двигатель смешанного возбуждения идеально подходит для устройств автомобилей и промышленности (таких как генераторы). Выход двигателя смешанного возбуждения из под контроля менее вероятен, так как для этого ток параллельной обмотки возбуждения должен уменьшиться до нуля, а последовательная обмотка возбуждения должна быть закорочена.
Выход двигателя смешанного возбуждения из под контроля менее вероятен, так как для этого ток параллельной обмотки возбуждения должен уменьшиться до нуля, а последовательная обмотка возбуждения должна быть закорочена.
Характеристики коллекторного электродвигателя постоянного тока
Эксплуатационные свойства двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также регулировочными свойствами.
Основные параметры электродвигателя постоянного тока
Постоянная момента
Для коллекторного электродвигателя постоянного тока постоянная момента определяется по формуле:
,
- где Z – суммарное число проводников,
- Ф – магнитный поток, Вб [1]
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.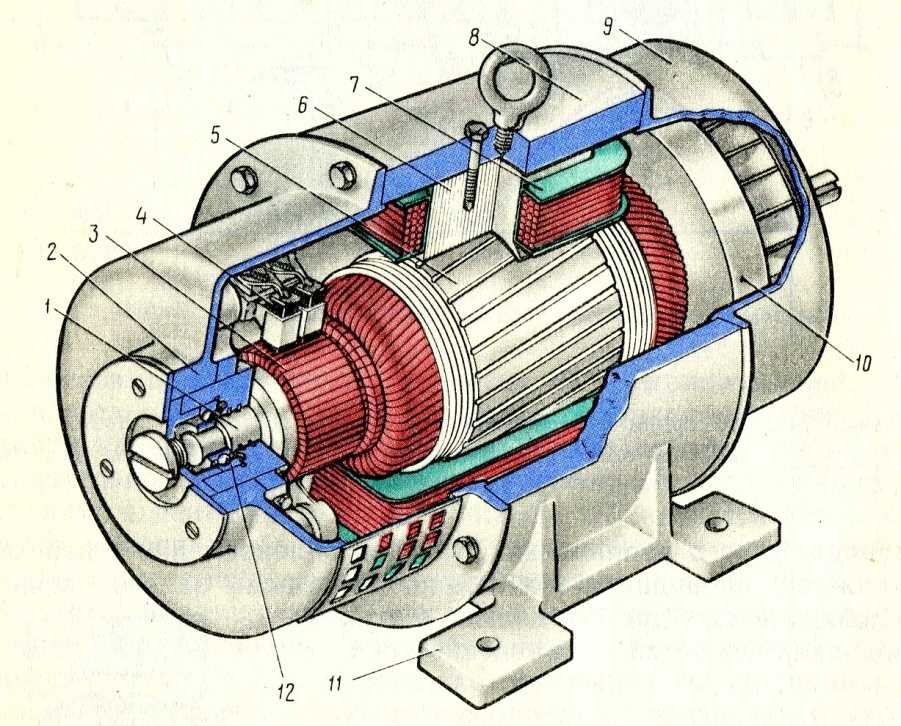
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, – можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите – Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья – черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз – магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
Коллекторный электродвигатель: достоинства, недостатки, область применения
Мы часто встречаемся с электродвигателями. Они обеспечивают работу бытовой и строительной техники, являются составной частью производственного оборудования. Немалая часть устройств имеет в составе коллекторный двигатель. Это один из простых и недорогих движков, который имеет хорошие характеристики. Именно этим, да ещё невысокой ценой, обусловлена его популярность.
Именно этим, да ещё невысокой ценой, обусловлена его популярность.
Что такое коллекторный двигатель и его особенности
Коллектором называют часть двигателя, контактирующую со щётками. Этот узел обеспечивает передачу электроэнергии в рабочую часть агрегата. Коллекторным называется двигатель, у которого хотя бы одна обмотка ротора соединена со щётками и коллектором. Коллекторные электродвигатели бывают:
- постоянного тока;
- переменного тока;
- универсальные.
Коллекторный двигатель может быть постоянного и переменного тока. Есть универсальные модели, которые могут работать от источника напряжения любого типа
Последние универсальные, работают как от постоянного, так и от переменного тока. Они сохраняют популярность, даже несмотря на то, что наличие щёток отрицательный момент, так как щётки стираются и искрят. За этим узлом требуется постоянное наблюдение, техническое обслуживание. К плюсам коллекторных двигателей относят возможность плавной регулировки скорости в широких пределах, невысокую стоимость.
Как и другие электромоторы, коллекторный состоит из статора и ротора (часто называют «якорь»). Его отличительной чертой является наличие на валу коллекторного узла, через который на машину передаётся электропитание. Устройство коллекторных моторов постоянного и переменного тока похожи, но имеют определённые отличия, потому рассмотрим подробнее их по отдельности.
Общее устройство коллекторных двигателей
Как и любой электродвигатель, коллекторный преобразует электрическую энергию в механическую. Он состоит из неподвижной части – статора и подвижной – ротора. В статоре располагаются обмотки возбуждения, ротор отвечает за передачу возникающей механической энергии. Одна из составляющих частей ротора – вал. С одной стороны, на валу размещён коллекторный узел, с помощью которого на обмотки ротора передаётся электрическая энергия.
Коллекторный двигатель: устройство
Статор состоит из корпуса, который защищает компоненты мотора от повреждений. Сверху и снизу корпуса крепятся магнитные полюса. Они необходимы для поддержания магнитного потока между статором и ротором.
Они необходимы для поддержания магнитного потока между статором и ротором.
Ротор коллекторного двигателя
Ротор коллекторного двигателя состоит из вала, на который насаживается сборный магнитопровод. С одной стороны, на вал крепится коллекторный узел, с другой, лопасти вентилятора. Для обеспечения лёгкого вращения и для фиксации в корпусе на вал с двух сторон надеваются подшипники. Для нормальной работы электродвигателя, необходимо чтобы ротор был отлично сбалансирован. Потому к изготовлению этой части подходят особенно скрупулёзно.
Подвижная (вращающаяся) часть
Роторная обмотка
Сердечник ротора собирается из металлических пластин, отштампованных из магнитного металла. Толщина пластин 0,35-0,5 мм, каждая из них залита слоем диэлектрического лака, для избавления от паразитных токов. Пластины по внешнему краю имеют пазы, в которые затем укладываются витки медной проволоки. Эти пластины насаживаются на вал и закрепляются на нём, собирается пакет требуемого размера. Эта система является магнитопроводом.
Так выглядит ротор коллекторного двигателя
В пазы магнитопровода укладывается витки медного обмоточного провода. Выходы обмоток выводятся на коллекторный узел, где и происходит их переключение.
Как устроен коллекторный узел и как он работает
Коллекторный узел стоит рассмотреть подробнее. Иначе понять, как вращается ротор, сложно. Коллектор имеет цилиндрическую форму и набран из медных пластин (иногда называют ламелями), которые изолированы друг от друга слюдяными или текстолитовыми прокладками. Нет электрического контакта и с осью вала, к которому он крепится.
Коллектор имеет вид цилиндра, который набран из медных пластин. Пластины сделаны в виде секторов, разделены диэлектрическими прокладками
Получается, коллектор собран из медных секторов и без обмотки электрически друг с другом не связанных. К каждой пластине коллектора крепится вывод одной рамки обмотки ротора. К плоскости двух противоположных рамок коллектора прижимается две щетки. Они плотно прилегают к поверхности медной пластины коллектора, что даёт хороший контакт. На эти щётки подаётся потенциал, который и передаётся в тот виток обмотки ротора, который подключён к этим пластинам.
К парным пластинам коллектора прижимаются графитовые щетки
Так как ротор с некоторой скоростью вращается, одна пара пластин сменяется другой. Таким образом, напряжение передаётся на все обмотки ротора. При этом возникающие друг за другом поля поддерживают вращение ротора, «проталкивая» его в нужном направлении.
Принцип работы
Вот теперь, после того как рассмотрели устройство ротора, можно поговорить о том, как работает коллекторный двигатель. Собственно, принцип действия не отличается от других моторов, ротор начинает вращаться в магнитном поле благодаря наведенным на нём токам. Но как именно и почему эти тока наводятся? Для понимания надо вспомнить, как возникает электродвижущая сила в постоянном магнитном поле. Если в поле постоянного магнита ввести прямоугольную рамку, под действием возникающего в ней тока она начинает вращение. Направление вращения определяется по правилу буравчика. Для постоянного поля оно гласит так, если ввести правую руку в поле так, чтобы магнитные линии входили в ладонь, вытянутые пальцы укажут направление движения.
Иллюстрация к пояснению принципа работы коллекторного двигателя постоянного тока
Если посмотреть на устройство ротора, то видим, что каждая обмотка представляет собой такую рамку. Только состоит она не из одного провода, а из нескольких, но сути это не меняет. При помощи коллекторного узла, в какой-то момент времени, обмотка подключается к питанию, по ней протекает ток и вокруг проводника возникает магнитное поле. Оно взаимодействует с полем статора. В зависимости от типа, стоят там постоянные магниты или тоже протекает постоянный ток в обмотках, генерируя на полюсах собственное магнитное поле. Поля ротора и статора рассчитаны так, что при взаимодействии они «проталкивают» ротор в нужном направлении. Вот, коротко и без особых подробностей описание работы коллекторного двигателя постоянного тока.
Обмотки на роторе подключаются к пластинам коллектора. Когда с пластинами контактируют щетки, получаем замкнутый контур, по которому течет ток
Если немного вдуматься, можно понять, почему коллекторный двигатель позволяет легко и плавно регулировать скорость. Чем больше напряжение подается на обмотки ротора, тем более мощное поле генерирует статор, тем сильнее их взаимодействие и быстрее крутится ротор, так как его толкают с большей силой. Если напряжение уменьшить, взаимодействие меньше, результирующая скорость вращения тоже. Так что все что нужно регулировать напряжение, а это может даже простой потенциометр (переменное сопротивление).
Достоинства и недостатки
Как водится, начнём с перечисления плюсов. Достоинства коллекторных электромоторов такие:
- Простое устройство.
- Высокая скорость до 10 000 об/мин.
- Хороший крутящий момент даже на малых оборотах.
- Невысокая стоимость.
- Возможность регулировать скорость в широких пределах.

- Невысокие пусковые токи и нагрузки.
Схема коллекторного двигателя
Неплохие качества, но есть и недостатки, причём они не менее серьёзные. Минусы коллекторных электродвигателей такие:
- Высокий уровень шумов при работе. Особенно на высоких скоростях. Щетки трутся о коллектор, дополнительно создавая шумы.
- Искрение щёток, их износ.
- Необходимость частого обслуживания коллекторного узла.
- Нестабильность показателей при изменении нагрузки.
- Высокая частота отказов из-за наличия коллектора и щёток, малый срок службы этого узла.
В целом, коллекторный двигатель неплохой выбор, иначе его не ставили бы на бытовой технике. Справедливости ради стоит сказать, что при нормальном качестве исполнения, работают такие двигатели годами. Могут и 10-15 лет проработать без проблем.
Коллекторный двигатель постоянного тока с магнитами
В коллекторных двигателях постоянного тока постоянное магнитное поле обеспечивают:
- постоянные магниты;
- обмотки возбуждения.
Магниты и обмотки располагаются на корпусе статора, и чаще всего, вверху и внизу. Если говорить о маломощных моторах, то более популярны коллекторные двигатели с постоянными магнитами. Они проще в производстве, дешевле, быстро реагируют на изменение напряжения, что позволяет плавно регулировать скорость. Недостаток моторов с постоянными магнитами является их невысокая мощность, а еще то, что со временем или при перегреве магниты теряют свои свойства и это приводит к ухудшению характеристик двигателя.
Устройство коллекторного двигателя постоянного тока
Такие моторы имеют небольшую мощность, от единиц до сотен Ватт. Они используются в технике, для которой важна плавная регулировка скоростей. Это обычно детские игрушки, некоторые виды бытовой техники (в основном вентиляторы). Недостатком коллекторного мотора с магнитами является постепенная потеря мощности, магниты со временем становятся слабее, и без того небольшая мощность падает. Но в последнее время появились новые магнитные сплавы с большой магнитной силой, позволяющие создавать двигатели с большой мощностью.
С обмотками возбуждения
Коллекторные двигатели постоянного тока с обмотками возбуждения нашли более широкое применение. От двигателей этого типа работает аккумуляторный электроинструмент: болгарки, дрели, шуруповерты т.д. Обмотки возбуждения делают из изолированного медного провода (в лаковой оболочке). В качестве основы используются канавки в полюсных наконечниках. На них как на основу наматываются обмотки.
Коллекторный двигатель с системой обмоточного возбуждения
Если посмотреть на устройство коллекторного двигателя, мы видим два несвязанных между собой устройства, ротор и обмотки возбуждения. От способа их подключения зависят характеристики и свойства двигателя. Различают четыре способа соединения ротора и обмоток возбуждения. Эти способы называют способами возбуждения. Вот они:
- Независимое. Возможно только если напряжения на обмотке возбуждения и на якоре неравны (бывает очень редко). Если они равны, используется схема параллельного возбуждения.
- Параллельное. Хорошо регулируется скорость, стабильная работа на низких оборотах, постоянные характеристики, независимы от времени. К недостаткам подключения этого типа относится нестабильность двигателя при падении тока индуктора ниже нуля.
- Последовательное. При таком подключении нельзя включать двигатель с нагрузкой на валу ниже 25% от номинальной. При отсутствии нагрузки скорость вращения сильно возрастает, что может разрушить двигатель. Потому с ременной передачей такой тип подключения не используют, при обрыве ремня мотор разрушается. Схема последовательного возбуждения имеет высокий момент на низких оборотах, но не слишком хорошо работает на высоких, управлять скоростью сложно.
- Смешанное. Считается одним из лучших. Хорошо управляется, имеет высокий крутящий момент на низких оборотах, редко выходит из-под контроля. Из недостатков самая высокая цена по сравнению с другими типами.
Способы подключения обмоток возбуждения
Коллекторные двигатели постоянного тока могут иметь КПД от 8-10% до 85-88%. Зависит от типа подключения. Но высокопродуктивные отличаются высокими оборотами (тысячи оборотов в минуту, реже сотни) и низким моментом, так что они идеальны для вентиляторов. Для любой другой техники используют низкооборотистые модели с малым КПД, либо к продуктивным моделям добавляют редуктор, другого решения пока не нашли.
Универсальные коллекторные двигатели
Несмотря на то, что коллекторный узел можно назвать самым слабым местом электродвигателя, подобные модели нашли широкое применение. Все благодаря невысокой цене и легкости управления скоростью. Коллекторные двигатели переменного тока стоят практически в любой бытовой технике, как крупной, так и мелкой. Миксеры, блендеры, кофемолки, строительные фены, даже стиральные машины (привод барабана).
Универсальный коллекторный двигатель работает от постоянного и переменного напряжения
По строению универсальные коллекторные двигатели не отличаются от моделей постоянного тока с обмотками возбуждения. Разница, безусловно есть, но она не в устройстве, а в деталях:
- Схема возбуждения всегда последовательная.
- Магнитные системы ротора и статора для компенсации магнитных потерь делают шихтованного типа (единая система без сплошных разрезов).
- Обмотка возбуждения состоит из нескольких секций. Это необходимо, чтобы режимы работы на постоянном и переменном напряжении были схожи.
Работа коллекторных электродвигателей универсального типа основана на том, что если одновременно (или почти одновременно) поменять полярность питания на обмотках статора и ротора, направление результирующего момента останется тем же. При последовательной схеме возбуждения полярность меняется с очень небольшой задержкой. Так что направление вращения ротора остается тем же.
Достоинства и недостатки
Хотя универсальные коллекторные двигатели активно используются, они имеют серьёзные недостатки:
- Более низкий КПД при работе на переменном токе (если сравнивать с работой на постоянном такого же напряжения).
- Сильное искрение коллекторного узла на переменном токе.
- Создают радиопомехи.
- Повышенный уровень шума при работе.
Во многих моделях строительной техники
Но все эти недостатки нивелируются тем, что при частоте питающего напряжения в 50 Гц они могут вращаться со скоростью 9000-10000 об/мин. По сравнению с синхронными и асинхронными двигателями это очень много, максимальная их скорость — 3000 об/мин. Именно это обусловило использование этого типа моторов в бытовой технике. Но постепенно они заменяются современными бесщеточными двигателями. С развитием полупроводников их производство и управление становится всё более дешёвым и простым.
Коллекторный двигатель
1. Применение коллекторных двигателей в стиральных машинах
Коллекторные двигатели получили широкое применение не только в электроинструменте (дрели, шуруповёрты, болгарки и т.д), мелких бытовых приборах (миксеры, блендеры, соковыжималки и т.п), но и в стиральных машинах в качестве двигателя привода барабана. Коллекторными двигателями оснащено большинство (примерно 85%) всех бытовых стиральных машин. Эти двигатели применялись уже во многих стиральных машинах ещё с середины 90-х годов и со временем полностью вытеснили однофазные конденсаторные асинхронные двигатели.
Коллекторные моторы более компактные, мощные и простые в управлении. Этим и объясняется их столь массовое применение. В стиральных машинах применяются коллекторные двигатели таких марок производителей как: INDESCO, WELLING, C.E.S.E.T., SELNI, SOLE, FHP, ACC. Внешне они немного отличаются друг от друга, могут иметь разную мощность, тип крепления, но принцип работы их совершенно одинаковый.
2. Устройство коллекторного двигателя для стиральной машины
1. Статор
2. Коллектор ротора
3. Щётка (применяются всегда две щётки,
вторую на рисунке не видно)
4. Магнитный ротор тахогенератора
5. Катушка (обмотка) тахогенератора
6. Стопорная крышка тахогенератора
7. Клеммная колодка двигателя
8. Шкив
9. Алюминиевый корпус
Рис.2 Конструкция коллекторного двигателя стиральной машины
Коллекторный двигатель – это однофазный двигатель с последовательным возбуждением обмоток, предназначенный для работы от сети переменного или постоянного тока. Поэтому его называют ещё универсальный коллекторный двигатель (УКД).
Большинство коллекторных двигателей применяемых в стиральных машинах имеют конструкцию и внешний вид представленный на (рис.2)
Данный двигатель имеет ряд таких основных частей как: статор (с обмоткой возбуждения), ротор, щетка (скользящий контакт, всегда применяются две щётки), тахогенератор (магнитный ротор которого крепится к торцевой части вала ротора, а катушка тахогенератора фиксируется стопорной крышкой или кольцом). Все составные части скрепляются в единую конструкцию двумя алюминиевыми крышками, которые образуют корпус двигателя . На клеммную колодку выводятся контакты обмоток статора, щёток, тахогенератора необходимые для подключения к электрической схеме. На вал ротора запрессован шкив, через который посредством ременной передачи приводится в движение барабан стиральной машины.
Чтобы в дальнейшем лучше понять как работает коллекторный двигатель, давайте рассмотрим устройство каждого из его основных узлов.
3. Ротор (якорь)
Ротор (якорь) – вращающаяся (подвижная) часть двигателя. На стальной вал устанавливается сердечник, который для уменьшения вихревых токов изготавливают из наборных пластин электротехнической стали. В пазы сердечника укладываются одинаковые ветви обмотки, выводы которых прикреплены к контактным медным пластинам (ламелям), образующие коллектор ротора. На коллекторе ротора в среднем может быть 36 ламелей располагающихся на изоляторе и разделённые между собой зазором.
Для обеспечения скольжения ротора, на его вал запрессовываются подшипники, опорами которых служат крышки корпуса двигателя. Так же, на вал ротора запрессован шкив с проточенными канавками для ремня, а на противоположной торцевой стороне вала есть отверстие с резьбой в которое прикручивается магнитный ротор
4. Статор
Статор – неподвижная часть двигателя. Для уменьшения вихревых токов, сердечник статора выполнен из наборных пластин электротехнической стали образующих каркас, на котором уложены две равные секции обмотки соединённые последовательно. У статора почти всегда есть только два вывода обеих секций обмотки. Но в некоторых двигателях применяется так называемое секционирование обмотки статора и дополнительно имеется третий вывод между секциями. Обычно это делается из-за того, что при работе двигателя на постоянном токе, индуктивное сопротивление обмоток оказывает меньшее сопротивление постоянному току и ток в обмотках выше, поэтому задействуются обе секции обмотки, а при работе на переменном токе включается лишь одна секция, так как переменному току индуктивное сопротивление обмотки оказывает большее сопротивление и ток в обмотке меньше. В универсальных коллекторных двигателях стиральных машин применяется тот же принцип, только секционирование обмотки статора необходимо для увеличения количества оборотов вращения ротора двигателя. При достижении определённой скорости вращения ротора, электрическая схема двигателя коммутируется таким образом, чтобы включалась одна секция обмотки статора. В результате индуктивное сопротивление снижается и двигатель набирает ещё большие обороты. Это необходимо на стадии режима отжима (центрифугирования) в стиральной машине. Средний вывод секций обмотки статора применяется не во всех коллекторных двигателях.
Для защиты двигателя от перегрева и токовых перегрузок, последовательно через обмотку статора включают тепловую защиту с самовосстанавливающимися биметаллическими контактами (на рисунке тепловая защита не показана). Иногда контакты тепловой защиты выводят на клеммную колодку двигателя.
5. Щётка
Щётка – это скользящий контакт, является звеном электрической цепи обеспечивающим электрическое соединение цепи ротора с цепью статора. Щётка крепится на корпусе двигателя и под определённым углом примыкает к ламелям коллектора. Применяется всегда как минимум пара щёток, которая образует так называемый щёточно-коллекторный узел.
Рабочая часть щётки – графитовый брусок с низким удельным электрическим сопротивлением и низким коэффициентом трения. Графитовый брусок имеет гибкий медный или стальной жгутик с припаянной контактной клеммой. Для прижима бруска к коллектору применяется пружинка. Вся конструкция заключена в изолятор и крепится к корпусу двигателя. В процессе работы двигателя, щётки из-за трения о коллектор стачиваются, поэтому они считаются расходным материалом.
6.Тахогенератор
Тахогенератор (от др.-греч. τάχος – быстрота, скорость и генератор) – измерительный генератор постоянного или переменного тока, предназначенный для преобразования мгновенного значения частоты (угловой скорости) вращения вала в пропорциональный электрический сигнал. Тахогенератор предназначен для контроля скорости вращения ротора коллекторного двигателя. Ротор тахогенератора крепится напрямую к ротору двигателя и при вращении в обмотке катушки тахогенератора по закону взаимоиндукции наводится пропорциональная электродвижущая сила (ЭДС). Значение переменного напряжения, считывается с выводов катушки и обрабатывается электронной схемой, а последняя в конечном итоге задаёт и контролирует необходимую, постоянную скорость вращения ротора двигателя.
Такой же принцип работы и конструкцию имеют тахогенераторы применяемые в однофазных и трёхфазных асинхронных двигателях стиральных машин.
В коллекторных двигателях некоторых моделей стиральных машин марки Bosch (Бош) и Siemens (Сименс) вместо тахогенератора применяется датчик Холла. Это очень компактный и недорогой полупроводниковый прибор, который устанавливается на неподвижной части двигателя и взаимодействует с магнитным полем кругового магнита установленным на валу ротора непосредственно рядом с коллектором. У датчика Холла три вывода, сигналы с которого так же считываются и обрабатываются электронной схемой (подробно принцип работы датчика Холла в данной статье мы рассматривать не будем).
7. Схема подключения коллекторного двигателя
Как и в любом электродвигателе, принцип работы коллекторного двигателя основан на взаимодействии магнитных полей статора и ротора, через которые проходит электрический ток. Коллекторный двигатель стиральной машины имеет последовательную схему подключения обмоток. В этом легко убедится рассмотрев его развёрнутую схему подключения к электрической сети (Рис.7).
У коллекторных двигателей стиральных машин, на контактной колодке может быть от 6 до 10 задействованных контактов. На рисунке представлены все максимальные 10 контактов и всевозможные варианты подключения узлов двигателя.
Зная устройство, принцип работы и стандартную схему подключения коллекторного двигателя, без труда можно запустить любой двигатель напрямую от электросети без применения электронной схемы управления и для этого не надо запоминать особенности расположения выводов обмоток на клеммной колодке каждой марки двигателя. Для этого, достаточно всего лишь определить выводы обмоток статора и щёток и подключить их согласно схеме на приведённом ниже рисунке.
Порядок расположения контактов клеммной колодки коллекторного двигателя стиральной машины выбран произвольно.
На схеме, оранжевыми стрелочками условно показано направление тока по проводникам и обмоткам двигателя. От фазы (L) ток идёт через одну из щёток на коллектор, проходит по виткам обмотки ротора и выходит через другую щётку и через перемычку ток последовательно проходит по обмоткам обеих секций статора доходя до нейтрали (N).
Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону.
Для того, чтобы двигатель начал вращаться в другую сторону, необходимо лишь изменить последовательность коммутации обмоток.
Пунктирной линией обозначены элементы и выводы, которые задействованы не во всех двигателях. Например датчик Холла, выводы термозащиты и вывод половины обмотки статора. При запуске коллекторного двигателя напрямую, подключаются только обмотки статора и ротора (через щётки).
Внимание! Представленная схема подключения коллекторного двигателя напрямую, не имеет средств электрической защиты от короткого замыкания и устройств ограничивающих ток. При таком подключении от бытовой сети, двигатель развивает полную мощность, поэтому не следует допускать длительного прямого включения.
8. Управление коллекторным двигателем в стиральной машине
Для управления коллекторным двигателем, в стиральной машине применяется электронная схема ,силовым регулирующим элементом является симистор (Рис.8), который подает (пропускает) необходимое напряжение на двигатель. Симистор можно представит как быстродействующий выключатель (ключ),с силовыми электродами А1 и А2,а на управляющий затвор G поступают управляющие импульсы открывая его в нужный момент. В электрической схеме, симистор последовательно подключён с коллекторным двигателем.
Принцип действия электронных схем, в которых используется симистор, основан на двухполупериодном фазовом управлении. На графике (рис.9) показано как изменяется величина питающего мотор напряжения в зависимости от поступающих на управляющий электрод симистора импульсов с микроконтроллера.
Таким образом можно отметить,что частота вращения ротора двигателя напрямую зависит от напряжения прикладываемого к обмоткам двигателя.
Ниже представлены фрагменты условной электрической схемы подключения коллекторного двигателя с тахогенератором к электронному блоку управления (EC).
Общий принцип схемы управления коллекторного двигателя таков. Управляющий сигнал с электронной схемы поступает на затвор симистора (TY),тем самым открывая его и по обмоткам двигателя начинает протекать ток,что приводит к вращению ротора (M) двигателя. Вместе с тем, тахогенератор (P) передаёт мгновенное значение частоты вращения вала ротора в пропорциональный электрический сигнал. По сигналам с тахогенератора создаётся обратная связь с сигналами управляющих импульсов поступаемых на затвор симистора. Таким образом обеспечивается равномерная работа и частота вращения ротора двигателя при любых режимах нагрузки, вследствие чего барабан в стиральных машинах вращается равномерно. Для осуществления реверсивного вращения двигателя применяются специальные реле R1 и R2 , коммутирующие обмотки двигателя.
Изменение направления вращения двигателя
Т-тахогенератор
М-ротор (коллекторно-щёточный узел)
S-статор
P-тепловая защита
TY-симистор
R1 и R2– коммутирующие реле
В некоторых стиральных машинах, коллекторный двигатель работает на постоянном токе. Для этого, в схеме управления, после симистора, устанавливают выпрямитель переменного тока построенный на диодах (“диодный мост”). Работа коллекторного двигателя на постоянном токе увеличивает его КПД и максимальный крутящий момент.
9. Достоинства и недостатки универсальных коллекторных двигателей
К достоинствам можно отнести: компактные размеры, большой пусковой момент, быстроходность и отсутствие привязки к частоте сети, возможность плавного регулирования оборотов (момента) в очень широком диапазоне— от ноля до номинального значения— изменением питающего напряжения, возможность применения работы как на постоянном,так и на переменном токе.
Недостатки – наличие коллекторно-щёточного узла и в связи с этим: относительно малая надёжность (срок службы), искрение возникающее между щётками и коллектором из-за коммутации, высокий уровень шума, большое число деталей коллектора.
10. Неисправности коллекторных двигателей
Самая уязвимая часть двигателя – коллекторно-щёточный узел. Даже в исправном двигателе, между щётками и коллектором происходит искрение, которое довольно сильно нагревает его ламели. При износе щёток до предела и вследствие их плохого прижима к коллектору, искрение порой достигает кульминационного момента представляющего электрическую дугу. В этом случае ламели коллектора сильно перегреваются и иногда отслаиваются от изолятора, образуя неровность,после чего,даже заменив изношенные щётки, двигатель будет работать с сильным искрением,что приведёт его к выходу из строя.
Иногда происходит межвитковое замыкание обмотки ротора или статора (значительно реже), что так же проявляется в сильном искрении коллекторно-щёточного узла (из-за повышенного тока) или ослаблении магнитного поля двигателя, при котором ротор двигателя не развивает полноценный крутящий момент.
Как мы и говорили выше, щётки в коллекторных двигателях при трении о коллектор со временем стачиваются. Поэтому большая часть всех работ по ремонту двигателей сводится к замене щёток.
Стоит отметить,что надёжность коллекторного двигателя во многом зависит от того, насколько качественно и грамотно производители подходят к технологическому процессу его изготовления и сборки.
Электрические машины постоянного тока | Справочник заводского электрика
Страница 19 из 40
Рис. 34. К пояснению устройства машин постоянного тока
Электрическая машина постоянного тока состоит из неподвижной станины и вращающегося якоря. Часто по аналогии с машинами переменного тока неподвижную часть называют статором, а вращающуюся — ротором. Статор отливается цельным из стали. На статоре 1 (рис. 34) крепят главные 2 и дополнительные 3 полюса. На сердечники главных (основных) полюсов надевают катушки обмотки возбуждения 4. При прохождении по обмотке возбуждения тока создается главный магнитный поток (поле), для выравнивания которого сердечники полюсов снабжаются наконечниками определенной формы. Дополнительные полюса обычно устанавливаются на более крупных (более 100 кВт) машинах и их обмотки соединяют последовательно с обмоткой якоря. Дополнительные полюса предназначены для поддержания относительно неизменным поля работающей машины при изменении нагрузки, чем обеспечивается безыскровая работа щеток на коллекторе.
Сердечник якоря 5 набирают из листовой электротехнической стали: он имеет пазы 6, куда вкладывается обмотка. Выводы обмотки якоря присоединяют пайкой к расположенному на валу коллектору 7. Пластины коллектора изолируют друг от друга и от вала, на котором они располагаются. Обмотки якоря соединяются с внешней цепью при помощи щеток 8, которые могут смещаться на определенный угол по отношению к главным полюсам.
Обмотка якоря состоит из отдельных секций. Расстояние между пазами, в которых располагают проводники секций, выбирают примерно равным полюсному делению, т. е. расстоянию по окружности якоря между осями соседних полюсов. Представим электрическую машину простейшей моделью (рис. 35). Если первичный двигатель будет вращать якорь со скоростью п в направлении, указанном стрелкой, то в проводниках обмотки якоря будут наводиться ЭДС, направление которых можно определить по правилу правой руки.
При изменении угла поворота в пределах 0 <α< 180° ток идет от конца К секции к ее началу Н (рис. 35, а). Если угол изменяется в пределах 180о < α< 360°, ЭДС секции ес направлена в противоположную сторону, т. е. от начала Н к концу К секции. Но так как при повороте секции поворачивается и коллектор (в данном случае две пластины), щетка Щ1 по-прежнему будет иметь более высокий потенциал, чем щетка Щ2, и ЭДС не изменит своего направления. Ток в якоре и во внешней цепи (сопротивление rн) будет оставаться неизменным по направлению, хотя ток в секции iС будет менять свое направление. Переменный ток в постоянный преобразуется с помощью полуколец (коллектора).
Рис. 35. Модель машины постоянного тока
Машина постоянного тока, как и машина переменного, является обратимой, т. е. может работать в режиме двигателя или генератора. Если отключить сопротивление rн и к зажимам а и b подвести напряжение указанной на рис. 35, а полярности, го под действием этого напряжения в цепи якоря возникнет ток iя.
Этот ток будет направлен в противоположную, чем на рис. 35, сторону и будет неизменным по направлению. Ток в секции iс с помощью полуколец, к которым подсоединяются щетки Щ1 и Щ2, будет изменять свое направление. В результате взаимодействия проводников обмотки якоря с магнитным полем главных полюсов возникает вращающий момент, под действием которого якорь начнет вращаться в направлении, указанном стрелкой, т. е. машина сработает в режиме двигателя. Вследствие изменения направления тока в секции при вращении якоря ток в проводниках под одноименными полюсами имеет неизменное направление, и вращающий момент всегда направлен в одну и ту же сторону. Основное назначение коллектора (полуколец) у двигателя постоянного тока — преобразовывать постоянный по направлению ток i во внешней цепи в изменяющийся по направлению ток секции iС.
Если машину постоянного тока вращать посредством первичного двигателя, то при включенной цепи обмотки возбуждения (ОВ) машины проводники пересекут обмотку якоря постоянного магнитного поля, образованного в результате прохождения тока через ОВ машины. При этом по закону электромагнитной Индукции в проводниках обмотки якоря будет изменяться ЭДС, т. е. (при замкнутой внешней цепи) машина постоянного тока работает в режиме генератора. В этом режиме при взаимодействии потока возбуждения с током обмотки якоря создается тормозной момент якоря, т. е. механическая энергия превращается в электрическую. При увеличении количества секций и пластин коллектора ток на выходе генератора получается суммированием, токов отдельных секций, подсоединяемых к пластинам коллектора 1—8 (рис. 35, б).
Рабочие характеристики машин постоянного тока зависят от способа возбуждения. Так, цепь обмотки возбуждения может питаться от независимого источника электрической энергии (независимое возбуждение), может подсоединяться параллельно, последовательно или смешанно по отношению к обмотке якоря.
При независимом возбуждении (рис. 36, а) напряжение на зажимах машины постоянного тока понижается в основном из-за увеличения падения напряжения на внутреннем сопротивлении цепи якоря. При номинальном сопротивлении нагрузки напряжение генератора на 8-10 % меньше напряжения холостого хода. При уменьшении сопротивления нагрузки до нуля машина переходит в режим короткого замыкания: скорость вращения (обороты) и ток в якоре достигают значительных величин. Поэтому электрическую машину защищают от коротких замыканий и перегрузок быстродействующими устройствами защиты, отключающими цепь при токах, в 1,6—2 раза превышающих номинальный. Это обеспечивает нормальные условия эксплуатации: нагрев обмотки не превышает допустимого, искрение щеток в пределах нормы.
Генераторы независимого возбуждения применяют в тех случаях, когда необходимо производить регулирование напряжения в широком диапазоне, в том числе с изменением знака. Независимое возбуждение имеют генераторы высокого напряжения, в которых недопустимо обмотку возбуждения включать в цепь якоря из-за конструктивной сложности и опасности управления машиной обслуживающим персоналом. Стандартные напряжения питания обмоток возбуждения 110 или 220 В при любом рабочем напряжении генератора. Генераторы с постоянными магнитами имеют характеристики генераторов с нерегулируемым независимым возбуждением.
Рис. 36. Принципиальные схемы возбуждения машин постоянного тока: а — независимого; б — параллельного; в — последовательного; г — смешанного
В двигателе параллельного возбуждения (рис. 36, б) якорь Я и обмотка возбуждения ОД образуют параллельные ветви и общий ток двигателя равен сумме токов Iя и IВ. Ток возбуждения обычно составляет 2— 5 % тока якоря. Скорость вращения регулируют регулировочным реостатом r , который включается в цепь ОВ. Подбором сопротивления можно увеличить скорость вращения в 1,5— 3 раза.
Поскольку обмотка возбуждения подключена непосредственно к напряжению сети, то при неизменном сопротивлении r скорость вращения двигателя остается постоянной даже при изменении нагрузки в определенных пределах. Двигатели с параллельным возбуждением применяют там, где необходимы постоянная скорость и широкий диапазон регулирования скорости за счет регулирования тока возбуждения. Разрыв обмотки возбуждения недопустим, так как при этом возникает большая ЭДС самоиндукции. Появляющееся на разомкнутых концах обмотки высокое напряжение создает сильное искрообразование, что опасно для изоляции и для обслуживающего персонала. Разрыв цепи возбуждения у двигателей постоянного тока, кроме того, приводит к недопустимому увеличению скорости его вращения (двигатель идет в «разнос»), В этом случае необходимо немедленно отключать двигатель от сети.
В двигателе c последовательным возбуждением (рис. 36, в) обмотка возбуждения (ОД) соединяется последовательно с обмоткой якоря Я и пусковым реостатом rп. Вращающий момент двигателя пропорционален квадрату тока, поэтому с увеличением тока в якоре вращающий момент резко возрастает, и, наоборот, значительное увеличение тормозного момента на валу вызывает небольшое увеличение тока якоря. Это позволяет применять двигатели с последовательным возбуждением там, где требуются большие вращающие моменты и возможны перегрузки, значительно превышающие номинальные (трамвай, метро и т. п.).
Недостаток двигателей с последовательным возбуждением состоит в том, что при уменьшении нагрузки на валу уменьшается и магнитный поток, что вызывает увеличение скорости Так, при снижении нагрузки более 30% номинальной двигатель идет в «разнос». Поэтому там, где нагрузка может резко снижаться или вообще отключаться, двигатели с последовательным возбуждением применять нельзя.
Двигатели со смешанным возбуждением (рис. 36, г) имеют две обмотки возбуждения, включенные одна — параллельно, другая — последовательно. Поэтому такие двигатели сочетают в себе свойства двигателей с параллельным и последовательным возбуждением. Скорость вращения у двигателей со смешанным возбуждением с увеличением нагрузки уменьшается в большей степени, чем у двигателей с параллельным возбуждением, но не так резко, как у двигателей с последовательным возбуждением. При малых нагрузках и холостом ходе двигатель со смешанным возбуждением не идет в «разнос», так как имеет постоянный ток, создаваемый параллельной обмоткой возбуждения.
Пуск двигателя постоянного тока осуществляется через пусковые реостаты rп, которые служат для ограничения пускового тока. Сопротивление пускового реостата выбирают из расчета, чтобы пусковой ток не превышал более чем в два раза номинальный ток двигателя. С увеличением скорости вращения якоря пусковой ток уменьшается и реостат постепенно (ступенями или плавно) выводится. По окончании пуска пусковой реостат обязательно отключают. Важным моментом в работе двигателя является изменение направления вращения двигателя (реверс). Направление вращения двигателя постоянного тока любого типа изменится, если изменить направление тока либо в обмотке возбуждения, либо в обмотке якоря. Если же поменять местами провода, отходящие от источника питания, то одновременно изменится направление тока в ОВ и якоре, а направление вращения двигателя не изменится.
При эксплуатации двигателей необходимо обращать серьезное внимание на температуру отдельных частей машины, которая должна быть не выше допустимой. Номинальная температура входящего воздуха у двигателей, изготовленных по ГОСТ 183—55, 35 °С, а у двигателей, изготовленных по ГОСТ 183—66 и ГОСТ 183—74, 40 °С При увеличении температуры входящего воздуха допустимая мощность соответственно снижается.
Предельно допустимые превышения температуры частей двигателя при окружающей температуре 40 °С следующие: для изоляции классов А и Б — не выше 50 и 70 °С соответственно при измерении термометром и 60, 80 °С — при измерении методом сопротивления; превышение температуры активной части — 60, 80 °С.
Вкладыши подшипников скольжения не должны нагреваться выше 80° С при разности температур вкладыша и окружающей среды не более 45 °С; температура масла в подшипниках без маслоохладителей не должна превышать 70— 75 °С; для подшипников с принудительной смазкой — не более 65 °С на сливе масла; предельно допустимая температура подшипников качения 100 °С.
- Назад
- Вперёд
Двигатели постоянного тока устройство и режим работы
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита.
На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока.
Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество.
То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов.
С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение.
Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера.
В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Рисунок 3. Ротор с тремя обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения.
В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения.
Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
Двигатель постоянного тока. Характеристики и регулирование
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 🙂
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто.
Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится 🙂
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки.
Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома.
Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то 🙂 Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка 🙂
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет 🙂
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
- Ну и зависимость момента от тока и потока:
- М = См * Iя * Ф
- См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант.
А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи.
Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага 🙂 Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы.
Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт. В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту.
Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило. Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки.
В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря.
Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент.
Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения.
Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении.
Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять.
Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный.
Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями.
Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления.
Но это уже совсем другая история.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока.
В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование.
Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения.
Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря.
На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться.
Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками.
На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему.
В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять.
Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа.
В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор.
После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
ВидыЭлектродвигатели постоянного тока разделяют по характеру возбуждения:
Независимое возбуждениеПри таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах.
Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения.
При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждениеОбмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждениеВ этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатацииЭлектродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели постоянного тока можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя.
Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора.
В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые электродвигатели постоянного тока обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.
- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Похожие темы:
Принцип действия и устройство электродвигателя постоянного тока
Сейчас невозможно представить нашу жизнь без электродвигателей.
Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне.
Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т. д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается.
Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом.
Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию.
Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита. Но одна рамка после определенного количества вращений замирает в положении, параллельном внешнему магнитному полю.
Для продолжения движения необходимо добавить вторую рамку и в определенный момент переключить направление тока.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников.
Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом.
Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.
- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Принцип действия и устройство коллекторных машин постоянного тока
7.9. МИКРОДВИГАТЕЛИ, ПРИМЕНЯЕМЫЕ В ДЕТСКОМ ТЕХНИЧЕСКОМ ТВОРЧЕСТВЕ
Разнообразие изделий детского технического творчества не позволяет
остановиться на конкретных решениях.
В структурные композиции любого подвижного объекта почти всегда входит
электродвигатель. Именно он преобразует электрическую энергию в механическое
движение.
Разновидность электропривода модели в первую очередь зависит от источника
питания.
Если модель работает автономно, то, естественно, для нее необходим и
автоном-ный источник питания. Это, как правило, электрохимическая батарейка
или аккумулятор.
При выборе схемы электропривода необходимо лишь согласовать напряжение
электродвигателя с источником питания.
В стационарных установках используется обычная электросеть напряжением
220, 127 В. Для понижения напряжения до безопасного уровня применяются
понижающие трансформаторы и иногда выпрямители переменного тока в постоянный.
Такие приборы могут не входить в конструкцию изделия и являются вспомогательными.
Ниже в табл. 7.9.1 приводится техническая характеристика наиболее применяемых
в техническом творчестве электродвигателей.
Коллекторный двигатель переменного тока
Рассмотрим коллекторный двигатель переменного тока. Универсальные коллекторные электродвигатели могут питаться от источников как переменного, так и постоянного тока. Они часто используются в электроинструментах, швейных и стиральных машинах, мясорубках — там, где нужен реверс, регулировка частоты вращения ротора или его вращение с частотой более 3000 об/мин.
Обмотки статора и ротора коллекторного электродвигателя соединяются последовательно. К обмоткам ротора ток подводится через щетки, соприкасающиеся с пластинами коллектора, к которым подсоединяются концы обмоток ротора.
Реверс однофазного двигателя с коллектором осуществляется за счет изменения полярности включения в сеть обмоток статора или ротора, а скорость вращения можно регулировать, изменяя величину тока в обмотках.
Основные недостатки такого двигателя:
- высокая стоимость;
- сложность устройства, практическая невозможность самостоятельно осуществить его ремонт;
- значительный уровень шума, трудное управление, создание радиопомех.
Остается добавить, что при использовании устройств, содержащих однофазный электродвигатель, следует самое пристальное внимание уделить выбору его типа, схеме подключения, тому, как правильно осуществить расчет элементов. Асинхронный двигатель – принцип работы и устройство
Асинхронный двигатель – принцип работы и устройство
Устройство и принцип работы трехфазного асинхронного двигателя
Что такое статор и ротор и чем они отличаются
Принцип работы
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Преобразование энергии
На рисунке 5 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 5. Направление э. д. с., тока и моментов в генераторе (а) и двигателе (б) постоянного тока
Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозные вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
| Mэм = Mв — Mтр — Mс, | (7а) |
где Mв – момент на валу генератора, развиваемый первичным двигателем, Mтр – момент сил трения в подшипниках, о воздух и на коллекторе электрической машины, Mс – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения.
В двигателе при установившемся режиме работы
| Mэм = Mв + Mтр + Mс, | (7б) |
где Mв – тормозной момент на валу двигателя, развиваемый рабочей машиной (станок, насос и т. п.).
В генераторе Mэм является тормозным, а в двигателе – вращающим моментом, причем в обоих случаях Mв и Mэм противоположны по направлению.
Развиваемая электромагнитным моментом Mэм мощность Pэм называется электромагнитной мощностью и равна
| Pэм = Pэм × Ω, | (8) |
где
| Ω = 2 × π × n, | (9) |
представляет собой угловую скорость вращения.
Подставим в выражение (8) значение Mэм и Ω из равенств (5) и (9) и учтем, что линейная скорость на окружности якоря
Тогда получим
| Pэм = 2 × B × l × Dа × Iа × π × n = 2 × B × l × v × Iа |
или на основании выражения (1)
|
Pэм = Eа × Iа. |
(10) |
В обмотке якоря под действием э. д. с. Eа и тока Iа развивается внутренняя электрическая мощность якоря
| Pа= Eа × Iа. | (11) |
Согласно равенствам (10) и (11), Pэм = Pа, т. е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
Умножим соотношения (3) и (6) на Iа. Тогда для генератора будем иметь
| Uа × Iа = Eа × Iа – Iа2 × rа | (12) |
и для двигателя
| Uа × Iа = Eа × Iа + Iа2 × rа. | (13) |
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре.
Приведенные соотношения действительны и при более сложной обмотке якоря, так как э. д. с. и моменты отдельных проводников складываются. Эти соотношения являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Согласно им механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь, превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть этой мощности превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Установленные выше применимо к машине постоянного тока общие закономерности превращения энергии в равной степени относятся также к машинам переменного тока.
7.7. ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
Для преобразования переменного тока в постоянный, как известно, используют
выпрямители. Преобразование постоянного тока в переменный можно осуществить
электромашинными преобразователями. Каскад из двух машин: (асинхронный
двигатель переменного тока и генератор постоянного тока) вполне решают
эту задачу.
Но бывает ситуация, когда необходимо преобразовать постоянный ток низкого
напряжения в постоянный ток повышенного напряжения. Делается это в одной
комбинированной машине, состоящей из двигателя и генератора постоянного
тока с общей магнитной системой. Со стороны низкого напряжения это электродвигатель,
а со стороны повышенного напряжения — генератор постоянного тока с независимым
возбуждением.
В одних и тех же пазах якоря преобразователя заложены самостоятельные
обмотки низкого и повышенного напряжения. Концы обмоток присоединены
к соответствующему коллектору (рис. 7.7.1), причем обмотка повышенного,
напряжения имеет значительно большее число проводников, чем обмотка
низкого напряжения.
Одноякорные преобразователи широко применяются в авиационной технике,
а также в общепромышленных установках, где первичным источником постоянного
тока является аккумулятор.
Одноякорные преобразователи постоянного тока в трехфазный переменный
отличается от рассмотренного тем, что обмотка повышенного напряжения
состоит из
трех секций, смещенных друг от друга на 120°. Выводы секционных обмоток припаяны
к трем контактным кольцам и с помощью токосъемных щеток переменный ток
передается к потребителю.
Работа машины постоянного тока в режиме генератора
§ 110. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ГЕНЕРАТОРА Якорь генератора приводится во вращение каким-либо двигателем, развивающим вращающий момент М1. При перемещении проводников обмотки якоря в магнитном поле полюсов в них индуктируется э.д.с, направление которой определяется правилом правой руки (рис. 142). Если якорь вращается с числом оборотов в минуту п, то в его обмотке индуктируется э. д. с.
Если обмотку якоря через щетки замкнуть на какой-либо приемник энергии г (сопротивление нагрузки), то через этот приемник и обмотку якоря будет протекать ток Iя, который в обмотке якоря имеет направление, совпадающее с направлением э.д.с. В результате взаимодействия этого тока с магнитным полем полюсов создается электромагнитный момент Мэ, направление которого определяется правилом левой руки.
Таким образом, развиваемый машиной электромагнитный момент является тормозным, направленным встречно направлении вращения якоря машины, так что для вращения последнего первичный двигатель должен развивать вращающий момент М1 достаточный для преодоления электромагнитного тормозного момента,
следовательно, машина потребляет механическую энергию.
В случае равновесия моментов, т. е. М1== Мэ, якорь машины вращается с неизменно скоростью. При нарушении равновесия моментов число оборотов якоря начнет изменяться. Если почему-либо момент первичного двигателя уменьшится, т. е. станет меньше электромагнитного момента генератора (М1 Мэ) число оборотов якоря, а также э. д. с. и ток в его обмотке будут увеличиваться, что вызывает увеличение тормозного электромагнитного момента.
При нарушении равновесия моментов число оборотов якоря, э.д.с. и ток в его обмотке претерпевают изменения до восстановления равновесия моментов, т. е. пока электромагнитный момент генератора не станет равным вращающему моменту первичного двигателя.
Таким образом, любое изменение момента первичного двигателя, т. е. потребляемой генератором мощности, вызывает соответствующее изменение как электромагнитного момента генератора, так и вырабатываемой им мощности. Так же при изменениях нагрузки генератора потребуется соответствующее изменение момента первичного двигателя для поддержания постоянства числа оборотов якоря генератора.
Ток обмотки якоря Iя, протекающий при нагрузке генератора, встречает на своем пути сопротивление внешней нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щетками и коллектором rщ. Обозначив через rя внутреннее сопротивление машины, представляющее собой сумму сопротивлений обмотки якоря и щеточных контактов (rоб+rщ), для тока в якоре можем записать следующее выражение:
Сопротивление rщ непостоянно и зависит от большого числа факторов, как-то: величины и направления тока, состояния коллектора, силы нажатия щеток на коллектор, скорости вращения, радение напряжения в щеточных контактах остается примерно нанесенным при изменениях нагрузки (принимается равным 2 в на пару угольных и графитных щеток).
Поэтому внутреннее сопротивление машины rя также не являйся величиной постоянной при изменении нагрузки генератора.
Так как Iяrн=U, где (U— напряжение на зажимах генератора при нагрузке, то получим следующее уравнение равновесия э.д.с. лля генератора:
Из уравнения равновесия э.д.с. легко получить уравнение мощностей, т. е.
где Р2 — полезная мощность генератора, отдаваемая потребителю электрической энергии,
Рэ— внутренняя или электромагнитная мощность генератора, преобразованная им в электрическую,
Роб —потери мощности в обмотке якоря и щеточных контактах.
При холостом ходе генератора электромагнитная мощность равна нулю (Рэ=0), но для вращения якоря машины первичный двигатель должен затратить некоторую мощность Р, расходуемую на покрытие потерь холостого хода. Мощность Р складывается из потерь механических на трение в подшипниках и трение о воздух вращающихся частей машины Рмех и из потерь в стали на
гистерезис и вихревые токи Pст.В генераторах с самовозбуждением мощность Р включает также мощность, затраченную на создание магнитного потока, т. е. на возбуждение машины.
При нагрузке генератора первичный двигатель затрачивает мощность Р1 = Рэ + Ро.
Электромагнитный момент машины
где
— угловая скорость якоря.
то электромагнитный момент машины определится следующим выражением:
Величины а, р
иN постоянны для данной машины, поэтому выражение представляет собой некоторый постоянный для данной машины коэффициент и электромагнитный момент равен:
Виды КД
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.
Конструкция универсального коллекторного двигателя
Обозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
У устройств данного типа, возбуждение может быть последовательным и параллельным, но поскольку последний вариант сейчас не производят, мы его не будем рассматривать. Что касается универсальных КД последовательного возбуждения, то типовая схема таких электромашин представлена ниже.
Схема универсального коллекторного двигателя
Особенности и область применения универсальных КД
Основные недостатки данного устройства проявляются при его подключении к источникам переменного напряжения, что отражается в следующем:
- снижение КПД;
- повышенное искрообразование в щеточно-коллекторном узле, и как следствие, его быстрый износ.
Ранее КД широко применялись, во многих бытовых электроприборах (инструмент, стиральные машины, пылесосы и т.д.). На текущий момент производители практически престали использовать данный тип двигателей отдав предпочтение безколлекторным электромашинам.
Теперь рассмотрим коллекторные электромашины, работающие от источников постоянного напряжения.
КД с индуктором на постоянных магнитах
Конструктивно такие электромашины отличаются от универсальных тем, что вместо катушек возбуждения используются постоянные магниты.
Конструкция коллекторного двигателя на постоянных магнитах и его схема
Этот вид КД получил наибольшее распространение по сравнению с другими электромашинами данного типа. Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Основная сфера применения – маломощные приводы для различного оборудования, часто используется в детских игрушках.
КД на постоянных магнитах с игрушки времен СССР
Что представляет собой обмотка якоря двигателя постоянного тока
В последнее время в некоторых системах автоматического регулирования получили широкое распространение малоинерционные электродвигатели постоянного тока с печатной обмоткой якоря.
Рис. II.42. Электродвигатель постоянного тока с печатной обмоткой якоря: 1 — диск якоря; 2, 8 — кольца из ферромагнитного материала; 3 — втулка; 4 — печатная обмотка якоря; 5 — щеткодержатель; 6 — постоянные магниты; 7 — полюсные наконечники; 9 — вал
Они используются, например, в устройствах ввода — вывода вычислительных машин, дисковых устройствах памяти, в приводах различных лентопротяжных механизмов. Якорь этих электродвигателей имеет форму диска, на торцовые поверхности которого печатным способом нанесена обмотка якоря. Электродвигатели с печатной обмоткой мощностью до 200 Вт не имеют специального коллектора. На рис. II.42 показана конструкция электродвигателя с печатной обмоткой якоря. В магнитном поле постоянного магнита с торцовыми наконечниками 7 вращается тонкий диск 1 из изоляционного материала. На обе плоскости этого диска нанесена печатным способом однослойная простая обмотка постоянного тока (рис. II.43). Соединение обеих сторон печатной обмотки производится при помощи специальных «гальванических» заклепок.
Рис. II.43. Дисковый якорь с печатной обмоткой: 1 — печатные проводники обмотки; 2 — участки печатного монтажа, соответствующие месту установки щеток; 3 — заклепки
Профиль лобовых частей эффективных проводников обычно выполняется по эвольвенте, что позволяет обеспечить по всей части одинаковую плотность тока.
Кольца
Для увеличения мощности электродвигателя в некоторых конструкциях применяют многодисковое исполнение ротора. В этом случае электродвигатель представляет собой совокупность нескольких машин с печатной обмоткой ротора, собранных в одной магнитной системе. Мощность таких электродвигателей может достигать 20 кВт.
Электромеханическая постоянная времени электродвигателя постоянного тока с якорным управлением при одинаковых напряжениях управления и возбуждения может быть вычислена по формуле
где Т — электромеханическая постоянная времени, с;
Для обеспечения минимальной величины электромеханической постоянной времени электродвигателя с печатной обмоткой диаметр диска должен быть минимальным. Вместе с этим на диске должно размещаться достаточное число проводников обмотки, обеспечивающее требуемые номинальные данные. В связи с этим для получения минимальных размеров диска якоря следует среднюю индукцию в воздушном зазоре выбирать возможно большей :
где
Ф — полезный поток полюса в воздушном зазоре,
где
Максимально возможное число проводников, размещаемое на одной стороне диска, можно определить из следующего соотношения:
где
Практически электромеханическая постоянная времени электродвигателей постоянного тока с печатной обмоткой якоря в 3—5 и более раз меньше электромеханической постоянной времени двухфазного асинхронного электродвигателя с полым ротором той же мощности.
Для электродвигателей мощностью
Помимо высокого быстродействия отличительной особенностью электродвигателей с печатной обмоткой ротора является коммутация, практически не сопровождающаяся искрением. Это объясняется тем, что обмотка якоря обладает незначительной индуктивностью. Поэтому реактивная э. д. с., наводимая в коммутирующих секциях, незначительна по величине.
К недостаткам электродвигателя с печатной обмоткой ротора следует отнести более низкий к. п. д. и ограниченную долговечность вследствие износа контактирующей поверхности проводников обмотки якоря.
n9.doc
Глава 25Обмотки якоря машин постоянного тока§ 25.1. Петлевые обмотки якоряОсновные понятия.секция S; N; элементарный паз. развернутыми,, К — Простая петлевая обмотка якоряа, б первый частичный шаг по якорю , второй частичный шаг по якорю и результирующий шаг по якорю . правоходовой алевоходовой а б вшагом обмотки по коллектору ук. , Пример 25.1(2 = Решение=1 4. 122,3, 4 12 А и В К/(2) = а). б), в.(б) в., B2Параллельные ветви обмотки якоря.впараллельными ветвями. ) 1. 23, в.ЭДС обмотки якоря определяется значением ЭДС одной параллельной ветви, тогда как значение тока обмотки определяется суммой токов всех ветвей обмотки:В простой петлевой обмотке число параллельных ветвей равно числу главных полюсов машины: = .Пример 25.2.Решение. = = Сложная петлевая обмотка., т т = т (т у = ук = т. Пример 25.3.т — Решениеу у2 = § 25.2. Волновые обмотки якоряПростая волновая обмотка.ук =у. левоходовой, аправоходовой б. Шаг простой волновой обмотки по коллекторуПример 25.4Решение17в13 6 3, 69а б в в = . Сложная волновая обмоткасложную волновую обмотку.т т = 2). Пример 25.5 = Решение. = § 25. 3. Уравнительные соединения и комбинированная обмотка якоряУсловия симметрии обмотки якорясимметричной, несимметричной условиями симметрии.Первое условие.Sа Второе условие.Третье условие. т = 2.Уравнительные соединениямагнитная несимметрия, аб. = —уравнительными соединениями первого рода (уравнителями). потенциальным шагом . . Пример 25.6= Решение.1 73 9, 511а б уравнительные соединения (уравнители) второго рода, 2113 12 1212Комбинированная обмотка.а. б комбинированной обмотки по якорю равен потенциальному шагу , . р. = + § 25.4. Электродвижущая сила и электромагнитный момент машины постоянного токаЭлектродвижущая силаа, 12, расчетной полюсной дугой. коэффициентом полюсного перекрытия б 1расчетную длину якоря — , , .. у у > Электромагнитный момент.. М.а, 2, электромагнитная мощность машины постоянного тока, § 25.5. Выбор типа обмотки якоряNпри выборе типа обмотки следует отдавать предпочтение обмоткам якоря с минимальным числом параллельных ветвей,
| Число полюсов 2 | Ток якоря ,, А | Тип обмотки якоря |
| 2 | — | Простая петлевая |
| 4 | До 700 | » волновая |
| 4 | Свыше 700 до 1400 | » петлевая или комбинированная |
| 4 | Свыше 1400 | Сложная петлевая ( = 2) или комбинированная |
| Машины мощностью до 1 кВт | 25—30 |
| Машины мощностью более 1 кВт без компенсационной обмотки | 16 |
| Машины с компенсационной обмоткой | 20 |
Контрольные вопросы
- В чем принципиальное отличие обмоток якоря от обмоток статора бесколлекторных машин переменного тока?
- Какими параметрами характеризуется обмотка якоря?
- Сколько параллельных ветвей имеет обмотка якоря шестиполюсной машины в случаях простой петлевой и простой волновой обмоток?
- Во сколько раз изменится ЭДС обмотки якоря шестиполюсной машины, если простую волновую обмотку заменить простой петлевой при том же числе секций?
- Что такое магнитная несимметрия и каковы ее последствия?
- В каких обмотках якоря применяют уравнители первого и второго рода?
- Каковы достоинства комбинированной обмотки?
- Как влияют ширина секции и положение щеток на ЭДС машины?
- Какими соображениями руководствуются при выборе типа обмотки якоря?
Глава 25 Обмотки якоря машин постоянного тока
Перемотка или ремонт статора (якоря) после замыкания: как проверить статор
Что такое асинхронный электродвигатель знает практически каждый человек, который хоть немного имеет отношение к технике. А вот как именно он работает и из чего состоит, знает не так много, даже тех, кто работает и использует такие двигателя. В статье будут детально рассмотрены основные составные части и принцип работы. Дадим ответы на вопросы:
- Что такое статор ЭД и его назначение?
- Что такое якорь в двигателе?
- Что такое обмотки возбуждения?
Трехфазный асинхронный электродвигатель был изобретен русским, ученным М. О. Доливо-Добровольский, в 1889 году. Его основное предназначение – преобразование электрической энергии в механическую. благодаря свое эффективной работе и низкой стоимости он является одним из самых выпускаемых двигателей. Еще, соей популярности они обязаны, простоте своей эксплуатации.
Асинхронный электродвигатель применяется во всех отраслях промышленности. Их массово применяют для бытовых приборов. Как правило, используют двигателя, которые работают на переменном токе. Встретить их можно даже в детских игрушках.
Принцип работы основан на двух законах: магнитной индукции и законе Ампера. Первый закон описывает появление электродвижущих сил, под влиянием изменения магнитного поля, создаваемого статором. Второй закон описывает работу ротора, которая заключается в электрических зарядах, поступающих к проводнику, которые находятся внутри магнитного поля и объясняет распределение движущихся сил.
Cтатор в разных типах электродвигателей
Статор – это неотъемлемый узел электрической машины, сохраняющий неподвижное состояние во время работы двигателя. Ротор – вращающаяся часть электрического мотора, передающая механическую энергию на выходной вал. Другое название ротора – якорь.
Синхронный или коллекторный двигатель
Электрический ток на ламели коллектора передается графитовыми щетками. Такой электродвигатель будет работать, как в сети постоянного, так и переменного тока. Пульсирующее магнитное поле, создаваемое обмотками статора, будет взаимодействовать с пульсирующим магнитным полем, генерируемым обмотками якоря. Ротор станет вращаться. Подобные электродвигатели широко применяются в различных бытовых и промышленных приборах: электродрелях, пылесосах, силовых приводах станков, электротранспорте.
Интересно. Двигатели такого типа имеют еще одно название – синхронные. Это означает, что скорость вращения ротора равна скорости вращения электромагнитного поля, возникающего в двигателе.
Асинхронные двигатели
Подавляющее количество электромоторов, применяющихся и в промышленности, и в быту, – это асинхронные электродвигатели с короткозамкнутыми роторами. Такие двигатели применяются в трехфазных и однофазных сетях переменного тока.
Асинхронный двигатель
Статорная конструкция собирается из большого количества стальных пластин и расположена в корпусе основания, отлитом из немагнитных металлов: чугуна или алюминия.
Наборный статор двигателя
Материал пластин – электротехническая сталь. Пластины изолированы друг от друга специальным диэлектрическим лаком. В статоре имеются продольные пазы, где размещаются три обмотки, сдвинутые относительно оси вращения электромотора на 120 градусов друг от друга. Ротор также набирается из изолированных пластин электротехнической стали. В пазы ротора уложены стержни из алюминия, реже меди, соединенные по торцам контактными кольцами. Отсюда и название – короткозамкнутый ротор. Такая конструкция, называемая «беличьим колесом», играет роль обмотки ротора.
Ниже представлен вид асинхронного электродвигателя в разрезе. Хорошо видно, что такое наборный статор.
Разрез асинхронного двигателя
Обмотки двигателя могут подключаться к трехфазной электрической сети по схеме «треугольник» или «звезда».
Варианты подключения трехфазного двигателя
Коммутация схемы производится в клеммной коробке двигателя, называемой борн или брно.
При подаче трехфазного напряжения в обмотках статора возникают пульсирующие токи, которые вызывают появление в статоре вращающегося магнитного поля. Это поле пересекает токопроводящие стержни ротора, в которых индуцируются вторичные пульсирующие токи. Результатом становится появление магнитного поля в роторе. Магнитные поля статора и ротора взаимодействуют и заставляют вращаться стержни «беличьего колеса», вместе с тем и сам ротор. Якорь вращается со скоростью несколько меньшей, чем магнитное поле статора.
Величина этой разности называется скольжением и может составлять от 2 до 8 %. Из-за наличия скольжения двигатели подобной конструкции получили название – асинхронные. Эффект скольжения физически необходим для работы асинхронного двигателя – не будет отставания вращения ротора от магнитного поля статора, не будет индуцироваться ток в стержнях ротора, исчезнет магнитное поле в якоре, приводящее во вращение ротор.
Ротор
Ротор асинхронного электродвигателя бывает двух видов: короткозамкнутым и фазным. Чаще всего встречаются машины с короткозамкнутым ротором. Их преимущество в простоте конструкция и несложной технологии изготовления. Что еще важно, в таких моторах отсутствует контакт с динамической конструкцией. Это повышает долговечность, делает обслуживание более редким и простым.
Асинхронный двигатель может быть с короткозамкнутым и фазным
Асинхронные электромоторы с фазным ротором имеют более сложную конструкцию. Но они позволяют плавно регулировать скорость без дополнительных устройств, со старта имеют высокий крутящий момент. Так что приходится выбирать: более простая конструкция или возможность регулировки скорости вращения.
Устройство короткозамкнутого ротора
Ротор состоит из вала и цилиндрической конструкции из короткозамкнутых стержней. Внешне эта конструкция очень напоминает беличье колесо, поэтому так часто называют короткозамкнутую обмотку ротора.
Устройство короткозамкнутого ротора
Изначально и стержни, и замыкающие кольца изготавливались из меди. Роторы современных асинхронных двигателей мощностью до 100 кВт делают из алюминиевых стержней, с алюминиевыми же замыкающими дисками. Расстояние между стержнями заливается снова-таки алюминиевым сплавом. Получается короткозамкнутый ротор, но уже со сплошным покрытием.
Так как при работе выделяется значительное количество тепла, для охлаждения перемычки «беличьего колеса» делают с дополнительными вентиляционными лопатками. Так во время работы происходит самоохлаждение. Оно работает тем эффективнее, чем выше скорость вращения.
Как устроен асинхронный двигатель: устройство и компоновка деталей
Ротор устанавливается в статор, концы вала фиксируются при помощи крышек с вмонтированными подшипниками. Это двигатель без щеток (безщеточный). Никаких дополнительных контактов и электрических соединений. Подвижная часть мотора начинает вращаться при наличии магнитного поля на статоре. Оно возникает после подачи питания. Это поле вращается, заставляя вращаться и предметы, которые находятся в его поле. Простая и надёжная конструкция, которая обусловила популярность электрических двигателей этого типа.
Как сделан фазный ротор
Устройство фазного ротора мало чем отличается от обмотки статора. Те же наборные кольца с пазами под укладку медных катушек. Количество обмоток ротора три, соединены они обычно «звездой».
Так выглядит фазный ротор асинхронного двигателя
Концы роторных обмоток крепят к контактным кольцам из меди. Эти кольца жёстко закреплены на валу. Кроме того, они обязательно изолированы между собой, не имеют электрического контакта со стальным валом (крепятся к стержню через диэлектрические прокладки). Так как наличие колец отличительная черта этого типа движков, иногда их называют кольцевыми.
Материал для статоров
Принцип работы электродвигателя
Статорные и роторные узлы набираются из изолированных пластин электротехнической стали толщиной от 0,2 до 0,5 мм. В такой стали присутствует повышенное количество кремния (3-4,5 %). В результате сплав получает повышенное электрическое сопротивление и улучшенные магнитные характеристики. Малая толщина пластин и высокое удельное сопротивление существенно снижают паразитные вихревые токи Фуко в статоре и роторе. Это позволяет уменьшить нагрев узлов и деталей электродвигателя, повысить его электрический КПД.
Отличия электродвигателей на промышленном производстве
Для крупных предприятий с большими производственными площадями требуется оборудование, работающее на больших мощностях. Технические характеристики электродвигателей позволяют таким станкам функционировать на мощностях в пределах от 1 до 2,5 кВт.
В деревообрабатывающем производстве используются станки трехфазного типа и асинхронного принципа действия. При этом, они без проблем работают при бытовом напряжении в 220 Вольт.
Источник
Технология перемотки статора
Ротор — что это такое
Индикаторами нештатной работы электромотора являются:
- Снижение мощности;
- Повышенный нагрев корпуса;
- «Пробивание» напряжения на массу.
В таком случае следует провести диагностику неисправности статора. Необходимо определить, как проверить статор на межвитковое замыкание мультиметром. Величина сопротивления обмоток указана в справочной литературе на конкретный двигатель. Проверив мультиметром сопротивление каждой из обмоток, можно определить дефектную. После чего необходимо перемотать одну или все обмотки статора.
Основные операции:
- Удаление из пазов статора старых обмоток;
- Очищение пазов от остатков старой электро,- и термоизоляции;
- Установка новой изоляции в пазах статора;
- Укладка новых обмоток;
- Пропитка обмоток диэлектрическим лаком и его сушка;
- Проверка электрических параметров новых обмоток статора.
При правильно проведенном ремонте электромотор восстановит свои первоначальные характеристики.
Что происходит в обмотке статора
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Проверка якоря коллекторного двигателя
Принцип работы синхронного генератора
У якоря коллекторного электродвигателя надо проверять два основных типа неисправностей:
- Механические;
- Электрические.
На заметку. К механическим неисправностям, как правило, относится выработка ресурса подшипников. Появляются сильный шум при работе двигателя, нагрев подшипников, продольный и радиальный люфт якоря.
Электрические неисправности включают в себя:
- Обрыв провода в обмотке;
- Межвитковое замыкание;
- Пробой обмотки на корпус якоря и самого мотора;
- Износ контактных ламелей коллектора.
Следует рассмотреть, как проверить якорь на межвитковое замыкание. Сделать это удобно с помощью цифрового мультиметра либо, при его отсутствии, стрелочным тестером.
Электронный мультиметр
Как прозвонить якорь? Следует поочередно измерять сопротивление обмоток якоря, касаясь щупами мультиметра противоположных ламелей коллектора. Значительное отклонение величины сопротивления позволит узнать неисправную обмотку. Пробой на корпус проверяется мультиметром в диапазоне сопротивления 20 кОм. Один щуп присоединяется к валу ротора, другим поочередно касаются ламелей коллектора. Прибор должен показывать состояние «разрыв». По показанию мультиметра менее 20 кОм можно узнавать о неисправности обмотки, и, следовательно, необходимости ремонта якоря.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Ремонт электродвигателей
Проведение ремонта электродвигателей, такого, как перемотка статора или ротора, – операция ответственная и кропотливая. Необходимы определенные знания и навыки работы, опыт. Проще всего производится устранение механических неисправностей, обычно это замена подшипников и восстановление геометрии коллектора либо его полная замена. Также бывает необходимо поменять стесанные графитовые щетки, подающие ток на обмотки якоря.
При ремонте электрической части двигателя потребуются специальные материалы, обмоточный провод нужной марки, специальные инструменты и оснастка. Если речь идет о ремонте ограниченного количества электродвигателей, то лучше обратиться в специализированное ремонтное предприятие. Это целесообразно, как с точки зрения качества ремонта, так и экономики.
Для проведения ремонтных работ в больших количествах необходимо создать профильный участок ремонта, подобрать персонал, содержать определенное количество оборудования, материалов и комплектующих, иметь справочную литературу.
Виды преобразователей
Почему так важно рассмотреть виды, чтобы понять, чем отличается статор электродвигателя от подвижной его части. Все дело в том, что конструктивных особенностей у электродвижков немало, то же самое касается и генераторов (это преобразователи механической энергии в электрическую, электродвигатели имеют обратную функциональность).
Итак, электрические двигатели делятся на аппараты переменного и постоянного тока. Первые в свою очередь разделяются на синхронные, асинхронные и коллекторные. У первых угловая скорость вращения статора и ротора равны. У вторых два эти показателя неравны. У коллекторных видов в конструкции присутствует так называемый преобразователь частоты и количества фаз механического типа, который носит название коллектор. Отсюда и название агрегата. Именно он напрямую связан с обмотками ротора двигателя и его статора.
Машины постоянного тока на роторе имеют тот же коллектор. Но в случае с генераторами он выполняет функции преобразователя, а в случае с электродвигателями функции инвертора.
Если электрический агрегат – это машина, в которой вращается только ротор, то его название – одномерный. Если в нем вращаются в противоположные стороны сразу два элемента, то этот аппарат носит название двухмерный или биротативный.
Теплоизоляция статора
Электродвигатель при работе подвержен достаточно сильному нагреву – до 100-145 0С. Для сохранения работоспособности, защиты деталей и узлов от перегрева на валу двигателя имеется крыльчатка вентилятора, производящая обдув ротора и статора. Кроме того, для защиты обмоток статора применяются различные термоизолирующие материалы, такие как:
- Прокладки на базе компонентов из слюды и специальных картонов;
- Термоизолирующие материалы из стеклоткани;
- Термостойкие пропиточные лаки.
Правильное технологическое применение таких теплоизоляционных компонентов обеспечивает долгую надежную и бесперебойную работу электродвигателей.
Обмотка
Обмотка статора создает магнитное поле вращающегося типа. При этом двигатель может иметь различное число катушек. Они соединяются между собой. Катушки устанавливаются в соответствующих пазах. Такая конструкция может состоять из одного или нескольких витков изолированных проводников.
Обмотка статора может иметь ряд отличий в разных типах моторов. Это в первую очередь касается ее изоляции. На этот параметр влияют величина напряжения при работе, форма и размер паза, предельная температура обмотки, а также ее тип.
Случается, в паз помещается не вся катушка, а только ее одна сторона. В этом случае обмотка называется однослойной. Если в паз установлены сразу две стороны катушки, то конструкция называется двухслойной. Материалом для статорной обмотки чаще всего выбирают медный провод круглого сечения.
Защита статора тепловым реле
В процессе эксплуатации электродвигатель может потреблять повышенный ток из сети и испытывать сильный нагрев. Причины могут быть разные, например, слишком большая нагрузка на валу, частые включения и выключения мотора, повышенная температура окружающей среды. Такие нештатные режимы работы могут привести к перегреву статорных обмоток и выходу их из строя. Для предотвращения повреждения электродвигателя в статорной системе устанавливается один или два биметаллических тепловых реле – это термовыключатели, называемые кликсонами.
Термовыключатель кликсон
При повышении температуры статора выше положенного значения происходит размыкание биметаллического контакта кликсона. Термовыключатель размыкает цепь питания катушки управления силовым контактором, который подает напряжение на электромотор. Контактор отключает электромотор от силовой электросети. Дальнейшее включение контактора и, следовательно, электродвигателя возможно лишь после охлаждения обмоток статора и замыкания биметаллической пары термовыключателя.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Двигатели, применяемые в промышленности
В промышленности успешно применяются оба типа двигателей: и асинхронные с короткозамкнутым ротором, и синхронные коллекторные.
Первый тип устройств имеет важные достоинства:
- Низкая цена;
- Надежность и долговечность;
- Простота эксплуатации.
Имеются и минусы:
- Невозможность плавного регулирования оборотов якоря;
- Невысокая скорость вращения – предел 3000 об./мин. в сетях с частотой 50Гц;
- Большие пусковые токи.
Однако достоинства этих изделий многократно превосходят их недостатки.
К сведению. Асинхронные двигатели применяются в тех устройствах, где требуются постоянные режимы работы промышленного или транспортного оборудования. Например, в приводах всевозможных насосов, ленточных транспортеров, в системах вентиляции, в подъемных механизмах. Ниша асинхронных электрических машин занимает 65-75 % от общего объема применяемых электромоторов.
Синхронные, коллекторные двигатели имеют свои достоинства:
- Возможность плавного бесступенчатого изменения скорости вращения;
- Большая мощность;
- Большая скорость вращения.
Недостатки, присущие коллекторным электромоторам:
- Относительно высокая стоимость;
- Скользящие контакты коллектора якоря, снижающие надежность эксплуатации и уменьшающие ресурс машины;
- Необходимость частого обслуживания.
Они применяются там, где необходимо плавное изменение угловых скоростей: это приводы станков, тяговые моторы электротранспорта, точные системы монтажа.
Оба типа двигателей находят массовое применение в промышленности и быту. Для их длительной и безотказной работы необходимо проведение регламентных работ, при необходимости и восстановительного ремонта, включающего перемотку обмоток статора и ротора.
Однофазный асинхронный двигатель
Выше рассматривался трехфазный асинхронный двигатель, в однофазном асинхронном двигателе их две. Одна рабочая, вторая вспомогательная. Вспомогательная нужна для того, чтобы придать первоначальное вращение ротору. Потому может называться ещё пусковой или стартовой.
Однофазный асинхронный двигатель имеет две обмотки: рабочую и вспомогательную (стартовую или пусковую)
Когда в статоре включена одна обмотка, она создаёт два равных магнитных поля, вращающихся в разные стороны. Если ввести в это поле ротор, который уже имеет какое-то начальное вращение, магнитное поле будет поддерживать это вращение. Но как запустить ротор на старте? Как придать ему вращение, ведь от одной обмотки возникают два равноценных магнитных поля, направленные в разные стороны. Так что с их помощью заставить вращаться ротор невозможно. В простейшем варианте вращение задаётся вручную — механически. Затем вращение подхватывает поле.
Чтобы автоматизировать запуск однофазного асинхронного двигателя и сделана вспомогательная обмотка. Она сконструирована так, что подавляет одну из составляющих магнитного поля основной обмотки и усиливает вторую. Соответственно, одна из составляющих перевешивает, задавая вращение ротора. Затем стартовая обмотка отключается, вращение поддерживает основная.
Источник
Что такое арматура? (В электродвигателе и генераторе)
Содержание
Что такое арматура?
Якорь определяется как компонент электрической машины (т. е. двигателя или генератора), по которому передается переменный ток (AC). Якорь проводит переменный ток даже на машинах постоянного тока (постоянный ток) через коммутатор (который периодически меняет направление тока) или благодаря электронной коммутации (например, в бесщеточном двигателе постоянного тока).
Якорь служит корпусом и опорой для обмотки якоря. В электрических машинах магнитное поле создается постоянным магнитом или электромагнитом. Обмотка якоря взаимодействует с магнитным полем, образующимся в воздушном зазоре. Статор может быть вращающейся частью (ротор) или неподвижной частью (статор).
В 19 ом веке слово якорь было введено как технические аспекты и означало « держатель магнита ».
Как работает арматура?
Якорь используется в качестве электродвигателя или генератора. Якорь используется для связи между двумя магнитными потоками.
Когда якорь используется в качестве электродвигателя, из-за относительного движения между потоком, создаваемым обмоткой возбуждения, и потоком, создаваемым обмоткой якоря, индуцируется ЭДС.
Эта ЭДС противодействует току якоря и крутящему моменту ротора. И, следовательно, электрическая энергия преобразуется в механическую энергию. Крутящий момент, создаваемый ротором, передается на вращение других устройств через вал.
При использовании якоря в качестве электрогенератора в большинстве случаев якорь используется как ротор. А привод якоря осуществлялся механически с помощью дизельного двигателя или тягача.
Обмотка возбуждения возбуждается для создания магнитного поля. ЭДС якоря управляет током якоря, и, следовательно, механическая мощность вала преобразуется в электрическую.
Детали и схема якоря
Якорь состоит из сердечника, обмотки, коллектора и вала. Схема арматуры показана ниже.
Схема, иллюстрирующая части арматурыЧасти арматуры подробно рассматриваются ниже.
Сердечник арматуры
Сердечник арматуры состоит из ламинированных тонких металлических пластин, а не из цельного куска. Толщина ламинатов зависит от частоты питания. Его толщина составляет примерно 0,5 мм. Многослойная кремнистая сталь используется для сердечника якоря, чтобы уменьшить потери на вихревые токи и гистерезис.
Как правило, сердечник арматуры представляет собой полый цилиндр. А вал размещен внутри сердечника якоря.
Ядро состоит из количества слотов. Обмотка якоря размещена в пазах, предусмотренных на внешней поверхности сердечника якоря. Пазы в сердечнике якоря скошены под некоторым углом во избежание магнитного замыкания и обеспечивают плавное вращение.
Обмотка якоря
Обмотка якоря вставляется в пазы сердечника якоря. Обмотка якоря изолирована, чтобы избежать прямого контакта катушки с сердечником. Как правило, обмотка состоит из меди. Но в некоторых случаях его делают из алюминия, чтобы удешевить машину. В зависимости от конструкции обмотки якоря она может быть намотана внахлестку или волнообразно.
При намотке внахлест количество путей тока равно количеству полюсов и щеток. В этом типе обмотки конечный конец одной катушки соединен с сегментом коммутатора, а начальный конец следующей катушки соединен с тем же полюсом и сегментом коммутатора.
В схеме с волнистой обмоткой число путей тока равно двум. В этом типе обмотки оба конца каждой катушки соединены с сегментом коммутатора с расстоянием между полюсами. При этом производится последовательное соединение катушек и сложение напряжений в обмотке между щетками.
Чтобы узнать больше об этих схемах обмотки якоря, узнайте больше о шаге полюсов и пролете катушки.
Вал
Вал машины используется для передачи механической энергии. Он представляет собой жесткий стержень, установленный между двумя подшипниками. Длина, скорость и опорные точки выбираются таким образом, чтобы минимизировать гармонические искажения. Толщина вала выбрана достаточной для передачи крутящего момента, необходимого машине. и он должен быть достаточно жестким, чтобы контролировать любые неуравновешенные силы.
Коллектор
Коллектор состоит из медных стержней, каждый стержень отделен друг от друга с помощью изоляционных материалов, таких как слюда или пластик.
Напрессован на вал и провода от каждой катушки выходят из пазов и соединяются с шинами коллектора. Когда коллектор нажимается на вал, он должен точно совпадать с прорезью.
Якорь должен располагаться с точным угловым смещением от коллекторного стержня для эффективной работы магнитопровода.
Что заставляет вращаться якорь электродвигателя?
Электродвигатели используются для преобразования электрической энергии в механическую. Как правило, якорь представляет собой вращающуюся часть машины.
На проводник с током действует сила, когда он помещен в магнитное поле, и направление силы определяется правилом левой руки Флеминга.
Когда на статор подается питание, в двигателе индуцируется вращающееся магнитное поле. Это вращающееся магнитное поле воздействует на якорь (ротор), и якорь вращается. Это иногда называют реакцией якоря синхронного двигателя.
Как проверить арматуру?
Если якорь поврежден, двигатель не запустится. Итак, нам нужно проверить арматуру. Для проверки якоря снимите его с двигателя.
Проверка якоря 1
Сначала мы проверим обмотку якоря. С помощью этого теста мы можем определить, является ли обмотка якоря разомкнутой или короткозамкнутой.
В этом тесте мы измерим сопротивление двух коллекторных стержней каждой катушки под углом 180° друг к другу с помощью омметра. Показания омметра зависят от мощности двигателя. Но в этом условии нас не интересует точное чтение.
После проверки одного показания поверните якорь и проверьте сопротивление между каждой парой стержней на коммутаторе.
Если показания одинаковы для всех пар, обмотка якоря исправна. А если показание снижается к нулю, обмотка якоря закорочена. Точно так же, если показания увеличиваются до бесконечности, обмотка якоря повреждена или разомкнута.
Испытание арматуры 2
Нам нужно найти; какая обмотка повреждена. Итак, для этого нам нужно измерить сопротивление каждого бара. Аналогично тесту-1, если показания одинаковы для всех стержней, обмотка исправна. И если вы обнаружите резкое изменение сопротивления, обмотка повреждена.
Тест якоря 3
В этом тесте мы измерим сопротивление каждого коллекторного стержня с пакетом якоря. В этом испытании коллекторные стержни не должны иметь электрической непрерывности относительно пакета якоря.
Катушка якоря — обзор
ScienceDirectРегистрацияВход
Катушка якоря двигателя имеет тенденцию ускоряться, когда входит в магнитное поле, создаваемое катушками возбуждения, и замедляться, когда выходит из него.
Из: Modern Dictionary of Electronics (Seventh Edition), 1999
PlusДобавить в Mendeley W. Bolton, In Instrumentation and Control Systems, 2004
Пример
Разработайте модель для постоянного тока. двигатель с постоянными магнитами, связывающий ток через якорь с приложенным напряжением.
Когда ток течет через катушку якоря, на нее действуют силы в результате того, что ее токопроводящие проводники находятся в магнитном поле, создаваемом постоянным магнитом, и таким образом вызывают вращение катушки якоря. В катушке, вращающейся в магнитном поле, в ней индуцируется напряжение в таком направлении, чтобы противодействовать производящему его изменению, и поэтому возникает противоэдс. Таким образом, электрическая цепь, которую мы можем использовать для описания двигателя, имеет два источника ЭДС, которые применяются для создания тока якоря и противоЭДС. Таким образом, модель электрической цепи показана на рис. 8.16. Всего два элемента, индуктор и резистор, используются для представления катушки якоря. Таким образом, уравнение:
Рисунок 8.16. Модель для постоянного тока двигатель
va-vb=Ria+Ldiadt
Посмотреть главуКнига покупок
Прочитать главу полностью
URL: https://www.sciencedirect.com/science/article/pii/B9780750664325500085 PhD MS
3
3
3 , CEng, FRSE, FIERE, AGCI, DIC, JF Eastham, в Справочнике инженера-электрика (шестнадцатое издание), 2003 г. проведение тока в определенном направлении; пока сектора, соединенные с катушкой, проходят под щетками, катушка будет замыкаться щетками, а после выхода из щеток по катушке будет течь ток в обратном направлении. Таким образом, ток должен быть реверсирован в течение времени, в течение которого катушка закорочена (время коммутации). При нормальной окружной скорости коллектора 10–30 м/с это время обычно составляет от 2,5 до 0,2 мс. Из-за индуктивности катушки ток не может измениться за это время без какой-либо внешней помощи; необходимо индуцировать в короткозамкнутой катушке Э. Д.С. для содействия изменению тока, т.е. э.д.с. в направлении, противоположном направлению его э.д.с. когда, выйдя из зоны коммутации, он попадает в область следующего полюса. Таким образом, комполи приспособлены для воздействия на стороны катушки, подвергающиеся коммутации; комплексы имеют возбуждение, пропорциональное току якоря и полярности следующего главного полюса. Схема (i) нейтрализует М.Д.С. главного якоря. в зоне коммутации и (ii) создает там необходимую плотность потока коммутации. Требуемый составной поток пропорционален току якоря, поэтому составные обмотки соединяются последовательно с якорем.
Коммутация в машине, не оснащенной комполесом, может осуществляться путем смещения щеток назад (против направления вращения) так, чтобы коммутирующий поток обеспечивался последующим полюсом. Это невозможно сделать, если двигатель должен работать в обоих направлениях.
Просмотреть главуКнига покупок
Прочитать главу полностью
URL: https://www. sciencedirect.com/science/article/pii/B9780750646376500204
W. Bolton, in Instrumentation and4 Control Systems,
6.5 Двигатели
Электродвигатели часто используются в качестве конечного элемента управления в системах управления положением или скоростью. Основной принцип, на котором основаны двигатели, заключается в том, что сила действует на проводник в магнитном поле, когда по нему проходит ток. Для проводника длиной L , по которому течет ток I в магнитном поле с плотностью потока B под прямым углом к проводнику, сила F равна BIL .
Существует множество различных типов двигателей. В дальнейшем обсуждение ограничивается теми типами двигателей, которые обычно используются в системах управления, включая двигатели постоянного тока. двигатели и шаговый двигатель. Шаговый двигатель представляет собой тип двигателя, который используется для обеспечения фиксированного и последовательного углового движения путем вращения объекта на определенное количество оборотов или долю оборота.
6.5.1 Постоянный ток двигатели
В двигателе витки проволоки установлены в пазах на цилиндре из магнитного материала, называемом 9.0151 арматура. Якорь установлен на подшипниках и может свободно вращаться. Он установлен в магнитном поле, создаваемом полюсами поля. Это магнитное поле может быть создано постоянными магнитами или электромагнитом с его магнетизмом, создаваемым током, проходящим через так называемые катушки возбуждения . Будь то постоянный магнит или электромагнит, они обычно образуют внешний корпус двигателя и называются статором . На рис. 6.28 показаны основные элементы постоянного тока. двигатель с магнитным полем статора, созданным током через катушки провода. На практике будет более одной катушки якоря и более одного набора полюсов статора. Концы катушки якоря соединены с соседними сегментами сегментированного кольца, называемого 9.0151 коллектор который вращается вместе с якорем. Щетки в фиксированных положениях соприкасаются с вращающимися контактами коммутатора. Они проводят постоянный ток к обмотке якоря. Когда якорь вращается, коммутатор меняет направление тока в каждой катушке, когда он перемещается между полюсами поля. Это необходимо, если силы, действующие на катушку, должны продолжать действовать в том же направлении и, таким образом, продолжать вращение.
Рисунок 6.28. Основные элементы постоянного тока двигатель
Для двигателя постоянного тока двигатель с полем, обеспечиваемым постоянным магнитом, скорость вращения можно изменять, изменяя величину тока в обмотке якоря, направление вращения двигателя изменяя реверсированием тока в обмотке якоря. Рисунок 6.29показывает, как для двигателя с постоянными магнитами развиваемый крутящий момент зависит от скорости вращения для различных приложенных напряжений. Пусковой крутящий момент пропорционален приложенному напряжению, а развиваемый крутящий момент уменьшается с увеличением скорости.
Рисунок 6.29. Характеристики двигателя с постоянными магнитами
D.c. двигатели с катушками возбуждения классифицируются как последовательные, шунтирующие, составные и с раздельным возбуждением в зависимости от того, как соединены обмотки возбуждения и обмотки якоря.
- 1
-
Двигатель с последовательным возбуждением
У двигателя с последовательным возбуждением обмотки якоря и обмотки возбуждения соединены последовательно (рис. 6.30(a)). Такой двигатель создает самый высокий пусковой момент и имеет наибольшую скорость холостого хода. Однако при малых нагрузках существует опасность того, что двигатель с последовательным возбуждением может работать на слишком высокой скорости. Изменение полярности питания катушек не влияет на направление вращения двигателя, поскольку и ток в якоре, и в катушках возбуждения меняются местами.
Рисунок 6.30. (a) Серийный, (b) шунтирующий, (c) составной, (d) отдельно обмотанный
- 2
-
Двигатель с параллельным возбуждением
С двигателем с параллельным возбуждением (рис. 6.30(b)) обмотки якоря и возбуждения включены параллельно. Он обеспечивает самый низкий пусковой момент, гораздо более низкую скорость холостого хода и хорошую регулировку скорости.
Он обеспечивает почти постоянную скорость независимо от нагрузки, поэтому двигатели с параллельным возбуждением очень широко используются. Чтобы изменить направление вращения, можно изменить направление тока якоря или возбуждения. - 3
-
Составной двигатель
Составной двигатель (рис. 6.30(c)) имеет две обмотки возбуждения, одну последовательно с якорем и одну параллельно. Двигатели со смешанной обмоткой стремятся получить лучшие характеристики серийных двигателей и двигателей с параллельной обмоткой, а именно высокий пусковой момент и хорошую регулировку скорости.
- 4
-
Двигатель с независимым возбуждением
Двигатель с независимым возбуждением (рис. 6.30(d)) имеет раздельное управление токами якоря и возбуждения. Направление вращения двигателя может быть получено реверсированием якоря или тока возбуждения.
На рис. 6.31 показана общая форма характеристики крутящий момент-скорость вышеуказанных двигателей. Двигатель с независимым возбуждением имеет характеристику крутящий момент-скорость, аналогичную двигателю с параллельным возбуждением. Скорость такого постоянного тока двигатели можно изменить, изменив либо ток якоря, либо ток возбуждения. Обычно изменяется ток якоря. Выбор d.c. двигатель будет зависеть от того, для чего он будет использоваться. Так, например, в роботе-манипуляторе запястье робота может использовать двигатель с последовательной обмоткой, потому что скорость уменьшается по мере увеличения нагрузки. Двигатель с параллельной обмоткой можно использовать, если требуется постоянная скорость независимо от нагрузки.
Рисунок 6.31. Моментно-скоростные характеристики постоянного тока двигатели
Скорость двигателя с постоянными магнитами можно регулировать, изменяя ток через обмотку якоря, а двигатель с катушкой возбуждения — путем изменения тока якоря или тока возбуждения, хотя обычно изменяется ток якоря. Таким образом, управление скоростью можно получить, контролируя напряжение, подаваемое на якорь. Вместо того, чтобы просто пытаться напрямую изменять входное напряжение, более удобным методом является использование широтно-импульсная модуляция (ШИМ). Это в основном включает в себя принятие постоянного постоянного тока. напряжения питания и с помощью электронной схемы прерывать его таким образом, чтобы варьировалось среднее значение (рис. 6.32).
Рисунок 6.32. ШИМ: (а) принцип схемы ШИМ, (б) изменение среднего напряжения якоря путем прерывания постоянного постоянного тока. напряжение
Посмотреть главуКнига покупок
Прочитать главу полностью
URL: https://www.sciencedirect.com/science/article/pii/B9780750664325500061
Джон Хиндмарш, бакалавр технических наук, CEng, MIEE, Аласдер Ренфрю BSc, PhD, CEng, MIEE, в области электрических машин и приводов (третье издание), 1996 г.
Бесщеточные электроприводы действие щеток и коммутатора на постоянный ток.
машина. Такое расположение обеспечивает реверсирование (коммутацию) токов катушек якоря, когда катушки вращаются под действием поля одной полярности к противоположной полярности. Таким образом, общая сила и создаваемый крутящий момент сохраняют одно и то же направление. Коллектор и щетки в постоянном токе. машина действует как датчик положения вала. Якорь и МДС поля имеют фиксированное угловое смещение δ , иногда называемый углом крутящего момента (φ fa ), который схематично показан на рис. 7.25а, где предполагается, что якорь намотан так, что его общая МДС в том же направлении, что и ток в щетке. Рисунок 7.25. Бесщеточный двигатель, (а) Нормальный постоянный ток машина; (б) якорь на статоре; (c) схема управления главной цепью; (г) крутящий момент.
Для полностью бесщеточной машины, для которой поле должно быть постоянным магнитом, катушки якоря намотаны на стационарный (внешний) элемент (рис. 7.25b) и подключены через полупроводниковые переключатели, которые активируются из положения вала ( рис. 7.25c), так что их токи также меняются местами, чтобы соответствовать полярности вращающегося полюса поля. Таким образом, частота переключения автоматически синхронизируется со скоростью вращения вала, как для обычного двигателя постоянного тока. мотор. В δ = 90°, крутящий момент пропорционален F a × F f и, при любом другом угле, при синусоидальной МДС. распределений, крутящий момент пропорционален F a F f sin δ . По мере движения ротора δ изменяется от 0° до 180°; затем питание переключается, чтобы снова вернуть δ к нулю, и цикл повторяется. Таким образом, крутящий момент будет пульсировать, как однофазная выпрямленная синусоида (рис. 7.25d). Это расположение эквивалентно постоянному току. машина только с двумя сегментами коммутатора и имеет минимальное значение крутящего момента, равное нулю. Обычно имеется не менее трех отводов от трехфазной обмотки, которые, в свою очередь, питаются от трехфазного мостового инвертора. Это срабатывает под управлением датчика положения, так что его выходная частота автоматически регулируется скоростью вала. Пульсации крутящего момента теперь будут похожи на форму выходного сигнала трехфазного мостового выпрямителя; поскольку отсутствует нулевой крутящий момент, всегда доступен пусковой крутящий момент. Профилирование поверхности полюса магнита дополнительно улучшает плавность крутящего момента в течение всего цикла. Моменты переключения можно легко изменить, чтобы получить эффекты, подобные смещению оси щетки, которое иногда используется в умеренной степени на обычных двигателях постоянного тока. машины. См. пример 3.1. Характеристика скорость/нагрузка бесщеточной машины аналогична характеристике постоянного тока. машина с фиксированным возбуждением, т. е. скорость немного падает при увеличении крутящего момента.
Бесколлекторный, пост. тока приводы обычно используются для приложений с позиционным управлением в области промышленного управления. Поскольку продолжительность цикла зависит от движения ротора, ШИМ обычно не применяется к этим приводам. Поток ротора создается постоянными магнитами на роторе, обеспечивающими трапециевидную М.Д.С. Вариант с фасонными магнитами для создания синусоидальной МДС. известен как «бесщеточный кондиционер». Бесщеточная машина обычно питается от трехфазного инвертора, и регенерация также не вызывает затруднений, если предусмотрена подходящая схема силового электронного преобразователя. Хотя значительные исследовательские усилия были затрачены на улучшение скорости отклика или устранение необходимости в дорогостоящих датчиках для бесколлекторных двигателей постоянного тока. двигателей, в большинстве промышленных контроллеров используются простые датчики вала на эффекте Холла и фиксированные углы проводимости с переменным постоянным током. напряжение связи. Коммерческие устройства часто включают ПИ- или ПИД-регуляторы (стр. 19).7).
Просмотреть главуКнига покупок
Прочитать главу полностью
URL: https://www.sciencedirect.com/science/article/pii/B9780750627245500103
Магди С. Махмуд, Приложение к проектированию электромеханических систем управления, 2018
1.3.8 Эквивалентная схема генератора пост. вращается. Это индуцированное напряжение представлено источником напряжения.
Катушка статора имеет последовательное сопротивление.
Полюсный поток создается постоянным током возбуждения/поля, который магнитно связан с ротором. Цепь возбуждения имеет сопротивление и источник.
Падение напряжения на щетках представлено батареей.
Магнитное поле, создаваемое полюсами статора, индуцирует напряжение в катушках ротора (или якоря) при вращении генератора. Постоянный ток поля полюсов создает магнитный поток. Магнитный поток в воздушном зазоре на полюс (веберс) Φ пропорционален току поля, если железный сердечник не насыщен. Отсюда
Φag=KIf.
Проводники ротора перерезают силовые линии, генерирующие напряжение в катушках. У нас есть
Eag=2NrBℓgν.
Скорость двигателя ν и уравнения потока:
ν=ωDg2,Φag=BℓgDg.
Манипуляция приведенными выше соотношениями дает стандартное уравнение наведенного напряжения:
При нагрузке генератора ток нагрузки вызывает падение напряжения на сопротивлении обмотки ротора. Кроме того, на щетках наблюдается более-менее постоянное падение напряжения 1-3 В. Эти два падения напряжения уменьшают напряжение на клеммах генератора. Напряжение на клеммах
(1.19)Eag=VDC+IagRa+Vbrush.
Просмотреть главуКнига покупок
Прочитать главу полностью
URL: https://www.sciencedirect.com/science/article/pii/B9780128145432000011
William Bolton, in Instrumentation and Control Systems (Third), издание 9 0021, 3 021
6.5.2 Бесщеточный двигатель постоянного тока с постоянными магнитами
Проблема с двигателем постоянного тока. двигателей, описанных в предыдущем разделе, заключается в том, что им требуется коммутатор и щетки для периодического изменения направления тока через каждую катушку якоря. Щетки необходимо периодически менять, а коллектор шлифовать, так как щетки входят в скользящий контакт с коллектором и изнашиваются. Бесщеточный моторы не имеют этой проблемы.
Проводник с током в магнитном поле испытывает силу и при обычном постоянном токе. В двигателе магнит закреплен, и, следовательно, токонесущие проводники приводятся в движение. Однако, как следствие третьего закона движения Ньютона, магнит будет испытывать силу, противоположную и равную силе, действующей на проводники с током, и, таким образом, с бесщеточным постоянным магнитом постоянного тока. двигатель, токоведущие проводники неподвижны, а магнит движется. Имея всего одну катушку с током, результирующая сила, действующая на магнит, просто заставит его отклониться. Чтобы магнит продолжал двигаться, необходимо использовать последовательность катушек с током, и каждая из них по очереди включается.
На рис. 6.33 показана основная форма такого двигателя. Ротор представляет собой ферритовый или керамический постоянный магнит. Ток к катушкам статора AA, BB и CC переключается электронным способом транзисторами, расположенными последовательно вокруг них, при этом переключение контролируется положением ротора, так что на магнит всегда действуют силы, заставляющие его вращаться в одном и том же направлении. Датчики Холла (вход магнитного поля в датчик дает выходное напряжение) обычно используются для определения положения ротора и инициирования переключения транзисторами, датчики расположены вокруг статора. На рис. 6.34 показаны схемы переключения транзисторов, которые можно использовать с двигателем, показанным на рис. 6.33.
Рисунок 6.33. Бесщеточный постоянный магнит постоянного тока мотор.
Рисунок 6.34. Переключение транзисторов.
Для последовательного переключения катушек нам необходимо подать сигналы для включения транзисторов в правильной последовательности. Это обеспечивается выходами трех датчиков, работающих через схему декодера, чтобы дать соответствующие базовые токи. Таким образом, когда ротор находится в вертикальном положении, т. е. 0°, есть выходной сигнал от датчика c, но нет выходного сигнала от a и b, и он используется для включения транзисторов A+ и B−. Когда ротор находится в положении 60°, с датчиков b и c поступают сигналы, а транзисторы A+ и C− включаются. Таблица 6.2 показывает всю последовательность переключений. Вся схема управления таким двигателем доступна в виде единой интегральной схемы.
Таблица 6.2. Switching Sequence
| Rotor position | Sensor signals | |||||
|---|---|---|---|---|---|---|
| a | b | c | Transistors on | |||
| 0° | 0 | 0 | 1 | A+ | B — | |
| 60 ° | 0 | 1 | 1 | A+ | C — | 3 | . 0417 | 1 | 0 | B+ | C− |
| 180° | 1 | 1 | 0 | B+ | A− | |
| 240° | 1 | 0 | 0 | C+ | A− | |
| 360° | 1 | 0 | 1 | C+ | B− | |
View chapterPurchase book
Read full chapter
URL: https:/ /www.sciencedirect.com/science/article/pii/B978012823471600006X
Tony Roskilly, Rikard Mikalsen, Marine Systems Identification, Modeling and Control, 2015
Предполагается, что привод центробежного насоса приводится в действие электродвигателем постоянного тока (постоянного тока), как показано на рис. 2.16. Чтобы смоделировать эту систему, нам нужны математические представления в терминах ее электрических и механических подмоделей.
Рисунок 2.16. Центробежный насос с электроприводом.
Электродвигатель состоит из статора (неподвижной части) с катушками возбуждения (или постоянными магнитами), поддерживающими постоянное магнитное поле вокруг якоря. Якорь содержит обмотки (катушки якоря), позволяющие изменять магнитное поле от якоря за счет изменения тока через обмотки. Это делается путем контроля напряжения на клеммах двигателя. 2
Электрическая модель
С электрической точки зрения двигатель состоит из обмотки с индуктивностью L и малым сопротивлением R . Это показано на рис. 2.17. Они генерируют напряжение, связанное с током, i , такое, что:
Рисунок 2.17. Электрическая цепь постоянного тока мотор.
VR=iR,VL=Ldidt.
Когда двигатель вращается, в катушке также возникает обратное напряжение, электродвижущая сила (ЭДС), e . ЭДС пропорциональна угловой скорости ротора:
e=kedθdt,
, где k e — постоянная двигателя. Следовательно, если мы подадим напряжение В на клеммы двигателя, мы получим:
В=VR+VL+e=iR+Ldidt+kedθdt.
Механическая модель
С механической точки зрения двигатель состоит из приводного (электромагнитного) крутящего момента T e , который приводит в движение узел ротора (включая рабочее колесо) с инерцией Дж . Электромагнитный момент пропорционален току якоря на постоянную якоря k a :
Te=ka⋅i.
На узел рабочего колеса действует нагрузка с моментом нагрузки T L . Силы трения также препятствуют вращению узла ротора, и мы предполагаем, что крутящий момент, вызванный трением, пропорционален угловой скорости двигателя:
Tf=kfdθdt,
, где k f — коэффициент трения. Мы предполагаем, что это единственные крутящие моменты, действующие на ротор.
Эквивалентно второму закону Ньютона для систем линейного действия, результирующий крутящий момент (т. е. сумма всех крутящих моментов), действующий на узел ротора, будет определять его угловое ускорение. Эквивалентом массы в линейных системах является инерция для вращающихся систем, и мы получаем
Jd2θdt2=∑nTn,Jd2θdt2=Te−TL−Tf,Jd2θdt2+kfdθdt=Te−TL.
Резюме
Подводя итог, имеем два уравнения, моделирующие привод электронасоса:
iR+Ldidt=V−kedθdt,Jd2θdt2+kfdθdt=Te−TL, где Te=ka⋅i.
Входными данными для системы являются напряжение, подаваемое на клеммы двигателя, В и момент нагрузки T L . Мы будем использовать их позже для разработки систем управления двигателем.
Просмотр главыКнига покупок
Прочитать главу полностью Мехта, Ю. Дж. Редди, в системах автоматизации промышленных процессов, 2015 г.
2.4.1.11 Двигатели
двигатель имеет катушки проволоки, установленные в пазах на цилиндре из ферромагнитного материала, который называется якорем. Якорь установлен на подшипниках и может свободно вращаться. Он установлен в магнитном поле, создаваемом постоянными магнитами или током, проходящим через катушки проволоки, которые называются катушками возбуждения. Когда ток проходит через катушку якоря, на катушку действуют силы, приводящие к вращению. Щетки и коммутатор используются для реверсирования тока через катушку каждые пол-оборота, чтобы катушка продолжала вращаться. Скорость вращения можно регулировать, изменяя величину тока в катушке якоря. Однако, поскольку источники постоянного напряжения обычно используются в качестве входа для катушек, требуемый переменный ток часто обеспечивается электронной схемой. Это может контролировать среднее значение напряжения и, следовательно, тока, изменяя время, в течение которого постоянная постоянного тока напряжение включено. Широтно-импульсная модуляция (ШИМ) используется для управления средним значением постоянного тока. напряжение, подаваемое на якорь. Таким образом, ПЛК может управлять скоростью вращения двигателя, управляя электронной схемой, используемой для управления шириной импульсов напряжения.
Просмотр книги Глава Черта
Читать полная глава
URL: https://www.sciendirect.com/science/article/pii/b97801280093
024
W. Bolton, в контрольных Systems, 2002
постоянного тока двигатели широко используются с системами управления. В постоянном токе В двигателе витки проволоки установлены в пазах цилиндра из магнитного материала, называемого якорем . Якорь установлен на подшипниках и может свободно вращаться. Он установлен в магнитном поле, создаваемом полевые столбы. Это магнитное поле может быть создано постоянными магнитами или электромагнитом с его магнетизмом, создаваемым током, проходящим через так называемые катушки возбуждения . Будь то постоянный магнит или электромагнит, они обычно образуют внешний корпус двигателя и называются статором .
Для постоянного тока двигатель с полем, обеспечиваемым постоянным магнитом, направление вращения двигателя можно изменить, изменив направление тока в обмотке якоря. Скорость вращения такого двигателя можно менять, изменяя величину тока на обмотку якоря.
округ Колумбия двигатели с катушками возбуждения классифицируются как последовательные, шунтирующие, составные и с раздельным возбуждением в зависимости от того, как соединены обмотки возбуждения и обмотки якоря. В двигателе с последовательным возбуждением катушки якоря и катушки возбуждения соединены последовательно (рис. 1.56 (а)). Такой двигатель создает самый высокий пусковой момент и имеет наибольшую скорость холостого хода. Однако при малых нагрузках существует опасность того, что двигатель с последовательным возбуждением может работать на слишком высокой скорости. Изменение полярности питания катушек не влияет на направление вращения двигателя, поскольку и ток в якоре, и в катушках возбуждения меняются местами. С двигатель с параллельным возбуждением (рис. 1.56(б)) обмотки якоря и возбуждения включены параллельно. Он обеспечивает самый низкий пусковой момент, гораздо более низкую скорость холостого хода и хорошую регулировку скорости. Он обеспечивает почти постоянную скорость независимо от нагрузки, поэтому двигатели с параллельным возбуждением очень широко используются. Чтобы изменить направление вращения, можно изменить направление тока якоря или возбуждения. Составной двигатель (рис. 1.56(в)) имеет две обмотки возбуждения, одну последовательно с якорем и одну параллельно. Двигатели со смешанной обмоткой стремятся получить лучшие характеристики серийных двигателей и двигателей с параллельной обмоткой, а именно высокий пусковой момент и хорошую регулировку скорости. двигатель с независимым возбуждением (рис. 1.56(d)) имеет раздельное управление токами якоря и возбуждения. Направление вращения двигателя может быть получено реверсированием якоря или тока возбуждения. На рис. 1.57 показан общий вид моментно-скоростных характеристик вышеуказанных двигателей. Двигатель с независимым возбуждением имеет характеристику крутящий момент-скорость, аналогичную двигателю с параллельным возбуждением. Скорость такого постоянного тока двигатели можно изменить, изменив либо ток якоря, либо ток возбуждения. Обычно изменяется ток якоря.
Рисунок 1.56. (а) серия, (б) шунт, (в) соединение, (г) отдельно намотанный
Рисунок 1.57. Моментно-скоростные характеристики постоянного тока двигатели
Выбор двигателя постоянного тока двигатель будет зависеть от того, для чего он будет использоваться. Так, например, в роботе-манипуляторе запястье робота может использовать двигатель с последовательной обмоткой, потому что скорость уменьшается по мере увеличения нагрузки. Двигатель с параллельной обмоткой можно использовать, если требуется постоянная скорость независимо от нагрузки.
Просмотр главыКнига покупок
Читать главу полностью
URL: https://www.sciencedirect.com/science/article/pii/B9780750654616500015
В. Болтон, Программируемые логические контроллеры (шестое издание), 2015 200362 В двигателе постоянного тока витки проволоки установлены в пазах на цилиндре из ферромагнитного материала, который называется якорем . Рисунок 2.32. Широтно-импульсная модуляция. Для многих промышленных процессов требуется, чтобы ПЛК только включал или выключал двигатель постоянного тока. Это можно сделать с помощью реле. На рис. 2.33а показан основной принцип. Диод включен для рассеивания наведенного тока, возникающего из-за противо-ЭДС. Рисунок 2.33. Двигатель постоянного тока: (а) управление включением/выключением и (б) управление направлением. Иногда для изменения направления вращения двигателя требуется ПЛК. Это можно сделать с помощью реле для изменения направления тока, подаваемого на катушку якоря. На рис. 2.33b показан основной принцип. Для вращения в одном направлении переключатель 1 замкнут, а переключатель 2 разомкнут. Для вращения в другом направлении переключатель 1 размыкается, а переключатель 2 замыкается. Другая форма двигателя постоянного тока — бесщеточный двигатель постоянного тока . Хотя двигатели переменного тока дешевле, прочнее и надежнее, чем двигатели постоянного тока, поддержание постоянной скорости и управление этой скоростью, как правило, сложнее, чем с двигателями постоянного тока. Как следствие, двигатели постоянного тока, особенно бесщеточные двигатели с постоянными магнитами, как правило, более широко используются для целей управления. Просмотреть главуКнига покупок Прочитать главу полностью URL: https://www.sciencedirect.com/science/article/pii/B978012802929 Якорь установлен на подшипниках и может свободно вращаться. Он установлен в магнитном поле, создаваемом постоянными магнитами или током, проходящим через катушки проволоки, которые называются 9.0151 катушки возбуждения . Когда ток проходит через катушку якоря, на катушку действуют силы, приводящие к вращению. Щетки и коммутатор используются для реверсирования тока через катушку каждые пол-оборота и, таким образом, поддерживают вращение катушки. Скорость вращения можно изменять, изменяя величину тока в обмотке якоря. Однако, поскольку источники постоянного напряжения обычно используются в качестве входных данных для катушек, требуемый переменный ток часто обеспечивается электронной схемой. Это позволяет контролировать среднее значение напряжения и, следовательно, тока, изменяя время, на которое включается постоянное напряжение постоянного тока (рис. 2.32). Срок широтно-импульсная модуляция (ШИМ) используется, потому что ширина импульсов напряжения используется для управления средним постоянным напряжением, подаваемым на якорь. Таким образом, ПЛК может управлять скоростью вращения двигателя, управляя электронной схемой, используемой для управления шириной импульсов напряжения. При этом используется постоянный магнит для магнитного поля, но вместо катушки якоря, вращающейся в результате магнитного поля магнита, постоянный магнит вращается внутри неподвижной катушки. В обычном двигателе постоянного тока необходимо использовать коммутатор для реверсирования тока через катушку каждые пол-оборота, чтобы катушка вращалась в том же направлении. В бесщеточном двигателе с постоянными магнитами для реверсирования тока используется электронная схема. Двигатель можно запускать и останавливать, контролируя ток в неподвижной катушке. Реверс двигателя сложнее, так как реверсирование тока не так просто из-за электронной схемы, используемой для функции коммутатора. Один из используемых методов состоит в том, чтобы встроить в двигатель датчики для определения положения северного и южного полюсов. Затем эти датчики могут вызвать переключение тока в катушках в нужный момент, чтобы обратить вспять силы, приложенные к магниту. Скоростью вращения можно управлять с помощью широтно-импульсной модуляции, то есть контролируя среднее значение импульсов постоянного напряжения постоянного тока. 29
Электрические машины — якорь машины постоянного тока
Якорь электрической машины — исторически сложившееся название обмотки, в которой индуцируется напряжение и происходит передача мощности между электрическими и механическими системами. Этот термин используется в машинах постоянного тока и синхронных машинах переменного тока. В машине постоянного тока якорь представляет собой вращающуюся цепь.
Коммутация
В машине постоянного тока, разработанной до эпохи силовой электроники, используется механическая система для переключения напряжения контура, генерируемого переменным током, и подачи напряжения постоянного тока на клеммы машины. Этот процесс называется коммутацией. Механическое переключение достигается с помощью устройства, называемого коммутатором с разъемным кольцом. Рассмотрим рисунок и иллюстрацию на рис. 1. Каждый проводник (или каждая сторона петли) соединен с цилиндрическим проводником, который разделен на две половины. При вращении ротора цилиндр находится в контакте с неподвижными щетками. (Первоначально использовались втулки из медной проволоки; в современных машинах используются подпружиненные графитовые блоки.)
При вращении ротора половинки коллектора с разрезным кольцом проходят мимо стационарных щеток. С течением времени клеммы x и y подключаются к чередующимся концам проводящего контура ротора
Рассматривая графики индуцированного (красный) и конечного (синий) напряжения во времени, становится ясно, что напряжение, индуцированное в проводящем контуре на роторе продолжает чередоваться между положительным и отрицательным. Однако из-за расположения щеток измеренное напряжение на клеммах x-y является однонаправленным.
Увеличенные полюса и проводники
Реалистичные конструкции машин постоянного тока обычно имеют более двух полюсов. Увеличение количества полюсов для определенного потока на полюс увеличит наведенное напряжение при заданной скорости и увеличит крутящий момент, доступный на ампер. На рис. 1 показана схема статора с 4 полюсами. Каждый полюс будет нести катушку, являющуюся частью обмотки возбуждения. Картина потока будет похожа на Показаны линии потока, чередующие северный и южный полюса.
Рис. 2. Иллюстрация 4-полюсного поля постоянного токаВ общем случае с \(p\) полюсами картина поля будет повторяться каждые \(720/p\) градусов.
В рассматриваемой исходной базовой машине имеется только 2
проводников, или одна петля на роторе. Если количество витков (и разрезных колец
сегментов коммутатора) увеличивается, то щетки можно спроектировать так, чтобы они всегда были
в контакте с проводником, который находится под поверхностью полюса. Пример этой идеи с двумя катушками показан на рис. 3 9.0003 Рис. 3. Анимация двухполюсной системы с двумя перпендикулярными катушками обмотки якоря
Уравнения для общей машины
Среднее индуцированное напряжение каждого проводника на роторе машины определяется выражением
\[ e_{av}=rlB_{av}\omega_m \]
\(e_{av}\) — среднее индуцированное напряжение и \(B_{av}\) — величина средней плотности потока под полюсом. Используя общее уравнение для площади поверхности полюса
\[ A_p=\frac{2\pi rl}{p} \]
уравнение для среднего напряжения, индуцированного на проводнике под поверхностью полюса можно найти через поток и скорость:
\[ e_{av}=\frac{p}{2\pi}\phi\omega_m \]
Теперь, если вместо одного витка провода есть катушка с общей Z проводников (\(Z/2\)витков) соединены последовательно в любое время:
\[ e_{av}=\frac{Zp}{2\pi}\phi\omega_m \]
Обмотка машины, в которой индуцируется напряжение, называется
обмотка якоря. В машине постоянного тока обмоткой якоря является
обмотка на роторе. Определение постоянной машины постоянного тока \(k\):
\[ k=\frac{ZP}{2\pi} \]
приводит к уравнению напряжения якоря.
\[ E_A=к\фи\омега_м \]
Аналогично общему расчету напряжения, крутящий момент на одном проводнике можно записать как
\[ \tau_{av}=rlB_{av}я \]
, что дает общий крутящий момент, заданный уравнением крутящего момента машины постоянного тока.
\[ \тау=к\фи I_A \]
Обратите внимание, что поскольку мы перешли к уравнениям с постоянными значениями постоянного тока, уравнение напряжения якоря записывается в верхнем регистре как \(E_A\), чтобы обозначить, что это постоянное напряжение, а уравнение крутящего момента использует \(I_A\ ), чтобы показать, что ток является постоянным значением постоянного тока.
Цепь якоря
Модель эквивалентной схемы якоря
Модель эквивалентной схемы для якоря
машина постоянного тока показана на рис. 1. Наведенное напряжение якоря,
\(E_A\) представлен источником напряжения,
подключен через 2 щетки к остальной части цепи. Арматура
сопротивление обмотки \(R_A\) и напряжение на клеммах \(V_T\). Уравнение цепи якоря:
\[ V_T = E_A + I_A R_A \]
Рассматривая модель эквивалентной схемы, можно увидеть, что измеряемое напряжение машины, напряжение на клеммах \(V_T\) равно наведенному на якорь напряжению \(E_A\), когда ток якоря \(I_A\) равен нуль. Это происходит в двух случаях:
- без нагрузки: клеммы якоря подключены к источнику напряжения, но момент нагрузки отсутствует. В установившемся режиме момент двигателя и момент нагрузки равны и противоположны друг другу, то есть \(\tau=0\). Следовательно, ток якоря \(I_A\) равен нулю в соответствии с уравнением крутящего момента и \(E_A=V_T\)
- обрыв цепи: это тестовый случай, когда машина вращается внешней механической системой, а клеммы машины разомкнуты. Опять же, в этом случае \(I_A = 0 \) и \(E_A=V_T\)
Резюме
На этой странице простые уравнения постоянного тока расширяются до случая с несколькими полюсами и проводниками. Получены два важных уравнения для машин постоянного тока:
- Уравнение напряжения якоря
- Уравнения крутящего момента машины постоянного тока
Якорь моделируется эквивалентной схемой, учитывающей влияние сопротивления обмотки якоря.
\(E_A\) — наведенное внутреннее напряжение якоря; \(V_T\) — напряжение на клеммах.
Двигатель переменного тока— основные свойства, терминология и теория Двигатель переменного тока
преобразует электрическую энергию в механическую. В двигателе переменного тока используется переменный ток, другими словами, направление тока периодически меняется. В случае обычного переменного тока, который используется на большей части территории Соединенных Штатов, ток меняет направление 120 раз в секунду. Этот ток называется «переменный ток 60 циклов» или «переменный ток 60 Гц» в честь г-на Герца, который первым придумал концепцию переменного тока. Другая характеристика текущего потока состоит в том, что он может изменяться по количеству. Например, поток может встречаться в 5 ампер, 10 ампер или 100 ампер.
Было бы довольно трудно, если бы ток, скажем, 100 ампер в один момент протекал в положительном направлении, а затем протекал с такой же силой в отрицательном направлении. Вместо этого, по мере того, как ток готовится изменить направление, он сужается до тех пор, пока не достигнет нулевого потока, а затем постепенно нарастает в другом направлении. Максимальный ток (пики линии) в каждом направлении превышает указанное значение (в данном случае 100 ампер). Поэтому указанное значение дано как среднее. Важно помнить, что сила магнитного поля, создаваемого электромагнитной катушкой переменного тока, увеличивается и уменьшается с увеличением и уменьшением этого переменного тока.
Магазин ПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Двигатель переменного тока состоит из двух основных электрических частей: «статора» и «ротора», как показано на рисунке 8. Статор является неподвижным электрическим компонентом. Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, причем один полюс каждого магнита обращен к центру группы. Термин «статор» происходит от слова «стационарный». Тогда статор является неподвижной частью двигателя. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора. Ротор расположен внутри статора и закреплен на валу двигателя. Термин «ротор» происходит от слова вращающийся. Таким образом, ротор является вращающейся частью двигателя. Задача этих компонентов двигателя — заставить вращаться ротор, который, в свою очередь, будет вращать вал двигателя. Это вращение произойдет из-за ранее обсуждавшегося магнитного явления, когда разные магнитные полюса притягиваются друг к другу, а одинаковые полюса отталкиваются. Если вы постепенно меняете полярность полюсов статора таким образом, что их объединенное магнитное поле вращается, то ротор будет следовать и вращаться вместе с магнитным полем статора.
Как показано на рис. 9, статор имеет шесть магнитных полюсов, а ротор — два полюса. В момент времени 1 полюса статора A-1 и C-2 являются северными полюсами, а противоположные полюса, A-2 и C-1, являются южными полюсами. S-полюс ротора притягивается двумя N-полюсами статора, а два южных полюса статора притягиваются к N-полюсу ротора. Во время 2 полярность полюсов статора меняется так, что теперь полюса C-2, B-1 и N, а C-1 и B-2 являются полюсами S. Затем ротор вынужден повернуться на 60 градусов, чтобы выровняться с полюсами статора, как показано на рисунке. В момент 3 B-1 и A-2 равны N. В момент 4 A-2 и C-1 равны N. При каждом изменении противоположные полюса статора притягиваются к полюсам ротора. Таким образом, когда магнитное поле статора вращается, ротор вынужден вращаться вместе с ним.
Одним из способов создания вращающегося магнитного поля в статоре двигателя переменного тока является использование трехфазного источника питания для катушек статора. Чтобы создать вращающееся магнитное поле в статоре трехфазного двигателя переменного тока, все, что нужно сделать, это правильно намотать катушки статора и правильно подключить провода питания. Соединение для 6-полюсного статора показано на рисунке 11. Каждая фаза трехфазного источника питания подключена к противоположным полюсам, а соответствующие катушки намотаны в одном направлении. Полярность полюсов электромагнита определяется направлением тока, протекающего через катушку. Следовательно, если два противоположных электромагнита статора намотаны в одном направлении, полярность противоположных полюсов должна быть противоположной. Когда полюс A1 — это N, полюс A2 — это S, а когда полюс B1 — это N, B2 — это S и так далее.
На рис. 12 показано, как создается вращающееся магнитное поле. В момент времени 1 ток в полюсах фазы «A» положительный, а в полюсе A-1 — N. Ток в полюсах фазы «C» отрицательный, что делает C-2 полюсом N, а C-1 — полюсом. S. В фазе «В» ток отсутствует, поэтому эти полюса не намагничены. В момент времени 2 фазы сместились на 60 градусов, в результате чего полюса C-2 и B-1 стали оба N, а C-1 и B-2 оба S. Таким образом, по мере того, как фазы сдвигают свой ток, результирующие полюса N и S перемещаются. по часовой стрелке вокруг статора, создавая вращающееся магнитное поле. Ротор действует как стержневой магнит, притягиваемый вращающимся магнитным полем.
До сих пор мало что было сказано о роторе. В предыдущих примерах предполагалось, что полюса ротора были намотаны катушками, как и полюса статора, и питались постоянным током для создания полюсов с фиксированной полярностью. Кстати, именно так работает синхронный двигатель переменного тока. Однако большинство двигателей переменного тока, используемых сегодня, не являются синхронными двигателями. Вместо этого так называемые «асинхронные» двигатели являются рабочими лошадками промышленности. Так чем же отличается асинхронный двигатель? Большая разница заключается в том, как ток подается на ротор. Это не внешний источник питания. Как вы можете догадаться из названия двигателя, вместо него используется индукционная техника. Индукция — еще одна характеристика магнетизма. Это естественное явление, которое возникает, когда проводник (алюминиевые стержни в случае ротора, см. рис. 13) проходит через существующее магнитное поле или когда магнитное поле проходит мимо проводника. В любом случае их относительное движение вызывает протекание электрического тока в проводнике. Это называется «индуцированным» током. Другими словами, в асинхронном двигателе протекание тока в роторе вызвано не каким-либо прямым подключением проводников к источнику напряжения, а скорее влиянием проводников ротора, пересекающих линии потока, создаваемые магнитными полями статора. Индуцированный ток, создаваемый в роторе, приводит к возникновению магнитного поля вокруг проводников ротора, как показано на рисунке 14. Это магнитное поле вокруг каждого проводника ротора заставляет каждый проводник ротора действовать как постоянный магнит на рисунке 9. пример. Когда магнитное поле статора вращается, из-за воздействия трехфазного источника питания переменного тока наведенное магнитное поле ротора притягивается и будет следовать за вращением. Ротор соединен с валом двигателя, поэтому вал вращается и приводит в движение соединительную нагрузку.
Электродвигатели переменного тока доступны в 3 типах; 3-фазный IEC, однофазный NEMA и трехфазный NEMA. Эти двигатели переменного тока имеют мощность от одной восьмой до 750 л.с. Диапазон напряжений от 115 до 575. Прежде чем сделать окончательный выбор, проконсультируйтесь со специалистом по применению двигателей. Правильный выбор двигателя может сэкономить энергию и со временем снизить затраты на эксплуатацию вашей системы.
В чем разница между двигателем переменного и постоянного тока?
Электромеханическая машина, преобразующая электрическую энергию в механическую, называется электродвигателем. Это устройства, создающие вращательную силу, которая обрабатывается оперативной автоматикой.
Работа электродвигателя в основном зависит от взаимодействия магнитного и электрического полей. Обычно используемые детали, используемые в электродвигателях, включают центральный вал двигателя, обмотки, подшипники (для уменьшения трения и износа), якорь (расположенный на роторе, вращающейся части или статоре, неподвижной части), щетки (в двигателях постоянного тока). , Клеммы, Рама и торцевые щиты.
Электродвигатели в основном делятся на два типа. Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока потребляет переменный ток в качестве входа, тогда как двигатель постоянного тока потребляет постоянный ток.
Электродвигатель переменного тока и его механизм
В двигателе переменного тока снаружи расположено кольцо электромагнитов (составляющее статор). Который может быть разработан для обеспечения вращающегося магнитного поля. Внутри статора есть ось из цельного металла, петля из проволоки, катушка, беличья клетка из металлических стержней и межсоединения. Есть также некоторые другие свободно вращающиеся металлические детали, которые могут проводить электричество.
Ротор, подвешенный внутри магнитного поля, работает как электрический проводник. Из-за своего вращения магнитное поле постоянно меняется. Согласно закону электромагнетизма Фарадея, магнитное поле создает (или индуцирует) электрический ток внутри ротора. Если проводник представляет собой кольцо или проволоку, ток течет по нему по петле. Если проводник представляет собой просто цельный кусок металла, вокруг него закручиваются вихревые токи.
В любом случае, индуцированный ток создает собственное магнитное поле и, согласно другому закону электромагнетизма (закону Ленца), пытается остановить то, что вызывает вращающееся магнитное поле, — тоже вращаясь. Двигатели переменного тока предлагают относительно эффективный метод производства механической энергии из простого электрического входного сигнала.
Двигатель постоянного тока и его механизм
Эти двигатели основаны на куске проволоки, согнутой в прямоугольную петлю. Эта петля подвешена между полюсами магнита. При подключении провода и подключении его к батарее через него протекает постоянный ток (DC), и, таким образом, вокруг него создается временное магнитное поле. Это временное поле отталкивает первоначальное поле от постоянного магнита, в результате чего провод переворачивается.
Обычно провод останавливается в этой точке, а затем снова переворачивается. Но если используется оригинальное вращающееся соединение (которое называется коммутатором), ток можно менять на противоположное каждый раз, когда провод переворачивается. Это означает, что провод будет продолжать вращаться в одном и том же направлении до тех пор, пока по нему течет ток. Суть этого простого электродвигателя постоянного тока была придумана в 1820-х годах Майклом Фарадеем и примерно десять лет спустя превратилась в практическое изобретение Уильяма Стерджена.
Разница между двигателями переменного и постоянного тока
Без основного различия, то есть вход переменного и постоянного тока, двигатели переменного и постоянного тока имеют несколько других отличий.
Двигатели переменного тока не требуют преобразования тока.
| В двигателях постоянного тока ток преобразуется из альтернативного (переменного) в постоянный (постоянный) выходной сигнал. |
| Двигатели переменного тока доступны в двухфазном, однофазном или трехфазном исполнении. |
| Все двигатели постоянного тока однофазные. |
| В двигателях переменного тока якоря не вращаются при непрерывном вращении магнитных полей. |
| В двигателях постоянного тока якорь вращается при вращении магнитного поля. |
| Ремонт недорогой. |
| Ремонт довольно дорогой |
| Имеют более длительный срок службы. |
| Имеют более короткий срок службы. |
| Для запуска двигателей переменного тока требуется эффективное пусковое оборудование, такое как конденсатор. |
| Двигатели постоянного тока не требуют внешней помощи для запуска. |
| Имеют три входных клеммы. |
| Имеют две входные клеммы. |
| Двигатели переменного тока поздно реагируют на изменение нагрузки. |
| Двигатели постоянного тока быстро реагируют на изменение нагрузки. |
| Двигатели переменного тока применяются в случаях, когда требуется высокая скорость и переменный крутящий момент. |
| Двигатели постоянного тока применимы для обеспечения высокого крутящего момента и переменной скорости. |
| Скорость двигателей переменного тока просто регулируется изменением частоты тока. |
| Скорость двигателей постоянного тока регулируется изменением тока обмотки якоря. |
| Применяется для крупного промышленного использования. |
|
Типы электродвигателей — Thomson Lamination Company, Inc.
Электродвигатели можно найти во многих различных областях, от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений. Здесь мы делимся руководством, чтобы дать вам лучшее представление о доступных вариантах.
Электродвигатели и генераторы
Электродвигатели и генераторы представляют собой электромагнитные устройства с якорной обмоткой или ротором, который вращается внутри обмотки возбуждения или статора; однако они имеют противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях обеспечивает электрический ток для создания постоянного магнитного поля, которое используется обмоткой якоря для создания крутящего момента на валу двигателя. Различия между различными типами электродвигателей связаны с их уникальными характеристиками, напряжением и требованиями к применению. Существует не менее дюжины различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом, создавая механическую силу, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Коллекторные двигатели
Коллекторные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Щетки
- Коллектор
Существует четыре основных типа щеточных двигателей, в том числе:
- Серия двигателей. Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низких скоростях, ограниченный крутящий момент на высоких скоростях.
- Шунтирующие двигатели. Катушка возбуждения параллельна (шунтирует) ротору, поэтому ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличный контроль скорости, высокий/постоянный крутящий момент на низких скоростях.
- Накопительные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, что делает ток двигателя равным сумме токов последовательного и шунтирующего возбуждения. Характеристики: используется в промышленности и автомобилестроении, сочетает в себе преимущества серийных и параллельных двигателей.
- Электродвигатели постоянного тока с постоянными магнитами. Наиболее распространенный тип щеточного электродвигателя. В двигателях с постоянными магнитами постоянного тока для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на низких оборотах, ограниченный крутящий момент на высоких оборотах.
Бесщеточный
Бесщеточные двигатели не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо того, чтобы управлять магнитными полями на роторе, бесщеточные двигатели управляют магнитными полями от статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и создавать крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, входящие в классификацию двигателей переменного тока, бывают синхронными или асинхронными, в первую очередь отличающимися скоростью вращения ротора относительно скорости статора. Скорость ротора относительно статора равна в синхронном двигателе, но скорость ротора меньше его синхронной скорости в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, а асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигатель
Синхронный двигатель представляет собой машину с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора для создания трехфазного вращающегося магнитного потока. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора блокируется полем статора, двигатель становится синхронным.
Асинхронный (индукционный)
В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные путем подачи питания на статор без подачи питания на ротор. Асинхронные двигатели имеют конструкцию с обмоткой или с короткозамкнутым ротором. Некоторые примеры асинхронных асинхронных двигателей включают:
- Асинхронные рабочие двигатели с конденсаторным пуском. Это однофазный двигатель с короткозамкнутым ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частыми пусками и остановками.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя короткозамкнутый ротор из стальных пластин с высокой проводимостью. Это недорогие, малообслуживаемые и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших воздуходувках и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с короткозамкнутым ротором. Эти двигатели устраняют проблемы с низким пусковым моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от соответствия четырем характеристикам:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Мощность и скорость электродвигателя
Номинальная мощность и скорость вращения (об/мин) должны соответствовать требованиям нагрузки для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 л.с. до 1 л.с.), интегральные двигатели (от 1 л.с. до 400 л.с.) и большие двигатели (от 100 л.с. до 50 000 л.с.). Номинальные значения оборотов включают 3600 об/мин (2 полюса), 1800 об/мин (4 полюса) и 1200 об/мин (6 полюсов).
Корпус электродвигателя
Размер корпуса двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах. Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, а их цифры относятся к их размеру «D» или расстоянию от центра вала до центральной нижней части крепления. Как правило, двузначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза являются частью требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели имеют двойные индикаторы напряжения, такие как 230/460. Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 своей нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого питания, например, трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от условий установки двигателя. Существует две основные категории корпусов — открытые двигатели и закрытые двигатели.
Открытые двигатели
Открытые двигатели применяются в относительно чистых и сухих помещениях, что важно, поскольку открытые корпуса двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигатели
Эти типы не допускают свободного воздухообмена между внешней и внутренней частями двигателя. Различия в герметичности корпуса и функциях охлаждения также различают типы двигателей в закрытом корпусе, в том числе:
- Полностью закрытый с вентиляторным охлаждением (TEFC)
- Полностью закрытый невентилируемый (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая мойка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, который лучше всего подходит для вашего применения
Компания Thomson Lamination Company является ведущим производителем штампованных пластинчатых компонентов двигателя, способных производить большие партии роторных и статорных пластин из металлов с высокой проводимостью.
