Что такое вентильный двигатель. Как устроен вентильный двигатель. Как работает вентильный двигатель. Какие бывают виды вентильных двигателей. Где применяются вентильные двигатели. В чем преимущества и недостатки вентильных двигателей.
Устройство вентильного двигателя
Вентильный двигатель представляет собой разновидность бесколлекторного электродвигателя постоянного тока. Его основными конструктивными элементами являются:
- Ротор с постоянными магнитами
- Статор с обмотками
- Датчики положения ротора
- Электронный блок управления
Ротор вентильного двигателя выполнен в виде постоянного многополюсного магнита. Количество пар полюсов может варьироваться от 2 до 8. Современные конструкции используют магниты из редкоземельных элементов, обеспечивающие высокую магнитную индукцию.
Статор обычно содержит 3 обмотки, соединенные по схеме «звезда». Встречаются конструкции с большим количеством обмоток. Трехфазная структура считается оптимальной по соотношению эффективности и сложности.
Принцип работы вентильного двигателя
Принцип действия вентильного двигателя основан на взаимодействии магнитных полей ротора и статора. Как это происходит.
- Датчики определяют текущее положение ротора
- Электронный блок управления подает ток на обмотки статора
- Создается вращающееся магнитное поле статора
- Ротор стремится совместить свои полюса с полюсами поля статора
- Происходит вращение ротора
Ключевую роль в работе вентильного двигателя играет электронный блок управления. Он обеспечивает подачу тока на обмотки статора в нужной последовательности и с нужными параметрами. Это позволяет точно регулировать скорость и момент двигателя.
Классификация вентильных двигателей
Вентильные двигатели можно классифицировать по различным признакам:
По типу питания:
- Двигатели постоянного тока
- Двигатели переменного тока
По числу фаз:
- Однофазные
- Двухфазные
- Трехфазные
- Четырехфазные
По расположению ротора:
- С внутренним ротором
- С внешним ротором
Наиболее распространены трехфазные вентильные двигатели постоянного тока с внутренним ротором. Они обеспечивают оптимальное соотношение характеристик и стоимости для большинства применений.

Характеристики вентильных двигателей
Основные технические характеристики вентильных двигателей включают:
- Номинальное напряжение питания
- Номинальная мощность
- КПД
- Номинальная частота вращения
- Диапазон регулирования частоты вращения
- Номинальный крутящий момент
- Пусковой момент
- Габаритные размеры и масса
Какие значения этих параметров характерны для вентильных двигателей? Рассмотрим типичные диапазоны:
- Напряжение питания: 12-560 В
- Мощность: от единиц Вт до сотен кВт
- КПД: 85-95%
- Частота вращения: до 100 000 об/мин
- Диапазон регулирования: 1:10 000
- Момент: от долей Нм до тысяч Нм
Конкретные значения зависят от типа и размера двигателя. Вентильные двигатели обеспечивают высокие удельные показатели мощности и КПД при широком диапазоне регулирования.
Преимущества вентильных двигателей
Вентильные двигатели обладают рядом существенных преимуществ по сравнению с коллекторными двигателями постоянного тока и асинхронными двигателями:
- Высокий КПД (до 95%)
- Широкий диапазон регулирования частоты вращения
- Высокая удельная мощность
- Отсутствие щеточно-коллекторного узла
- Низкий уровень электромагнитных помех
- Большой ресурс и надежность
- Хорошие динамические характеристики
Какие из этих преимуществ наиболее важны? Высокий КПД позволяет экономить электроэнергию. Широкий диапазон регулирования частоты вращения обеспечивает гибкость применения. Отсутствие щеток повышает надежность и снижает затраты на обслуживание.

Недостатки вентильных двигателей
Несмотря на множество достоинств, вентильные двигатели имеют и определенные недостатки:
- Высокая стоимость
- Необходимость сложной системы управления
- Сложность изготовления и ремонта
- Возможность размагничивания ротора при перегреве
Высокая стоимость обусловлена применением дорогих постоянных магнитов и электроники. Сложная система управления требуется для коммутации обмоток. Эти факторы ограничивают применение вентильных двигателей в бюджетных изделиях массового производства.
Применение вентильных двигателей
Благодаря своим преимуществам вентильные двигатели находят широкое применение в различных отраслях:
- Бытовая техника (стиральные машины, кондиционеры)
- Компьютерная техника (жесткие диски, вентиляторы)
- Промышленные приводы (станки, роботы)
- Электротранспорт (электромобили, электровелосипеды)
- Авиационная и космическая техника
- Медицинское оборудование
Где конкретно используются вентильные двигатели? Вот несколько примеров:
- Привод компрессора в холодильнике
- Сервопривод промышленного робота
- Тяговый двигатель электросамоката
- Привод насоса в медицинском аппарате
Области применения вентильных двигателей постоянно расширяются благодаря их высокой эффективности и надежности.
Сравнение вентильных и коллекторных двигателей
Вентильные двигатели во многом превосходят традиционные коллекторные двигатели постоянного тока. В чем основные различия между ними?
| Характеристика | Вентильный двигатель | Коллекторный двигатель |
|---|---|---|
| КПД | 85-95% | 60-75% |
| Ресурс | 20 000+ часов | 1000-5000 часов |
| Диапазон регулирования скорости | 1:10 000 | 1:100 |
| Уровень шума | Низкий | Высокий |
| Обслуживание | Не требуется | Замена щеток |
Как видим, вентильные двигатели превосходят коллекторные по большинству ключевых параметров. Однако они сложнее и дороже в производстве.
Перспективы развития вентильных двигателей
Технология вентильных двигателей продолжает активно развиваться. Каковы основные тенденции и перспективы в этой области?
- Совершенствование магнитных материалов
- Развитие систем управления на базе микропроцессоров
- Интеграция двигателей с механическими узлами
- Повышение энергоэффективности
- Снижение стоимости производства
Ожидается, что в будущем вентильные двигатели будут все шире применяться в различных отраслях, постепенно вытесняя другие типы электродвигателей. Их развитие будет способствовать повышению энергоэффективности и экологичности техники.
конструкция, принцип работы, классификация, характеристики
Постоянное совершенствование технологий и развитие точного электрооборудования приводит к созданию новых и преобразованию старых устройств. Такому совершенствованию подвергаются и электрические машины, которые неоднократно преобразовывались для получения точного позиционирования. При массовом внедрении полупроводниковых приборов появилась возможность заменить классические щетки на p-n переходы, в результате чего был создан вентильный двигатель.
Конструкция и принцип работы
Конструктивно вентильный агрегат представляет собой разновидность синхронного двигателя.
В его состав входят:
- Ротор, как правило, из магнитного материала, реагирующий на воздействие электромагнитного поля.
- Статор, включающий в себя фазы обмоток, намотанные в катушки станину и диэлектрическую прокладку.
- Измерительные датчики (чаще всего Холла), позволяющие определить положение вращения вала.

- Микропроцессорный блок, формирующий импульсы, их форму, задающие частоту вращения ротора, сравнивающий показания датчиков и подаваемого переменного тока на фазные обмотки.

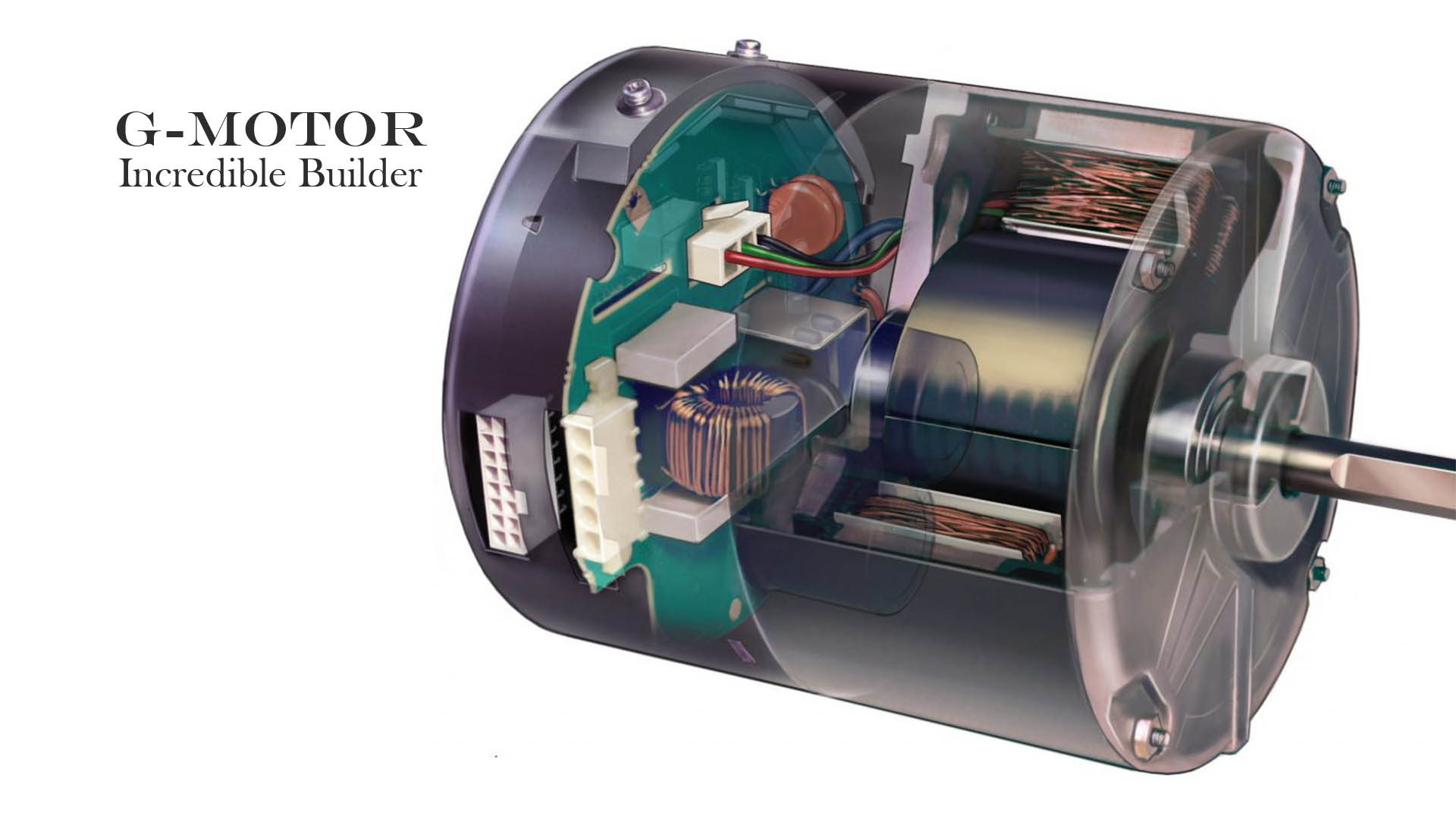
Пример конструкции вентильного двигателя приведен на рисунке ниже:
Рис. 1. Конструкция вентильного двигателяПринцип работы вентильного двигателя заключается в четком позиционировании постоянных магнитов на роторе по отношению к формируемому пику электромагнитного импульса на фазных электрических обмотках. При движении магнитов датчики воспринимают информацию об их положении в пространстве и меняют пропускную способность реактивных вентильных преобразователей, что позволяет валу вращаться дальше. Таким образом, управление вращением осуществляется без использования скользящего контакта, поэтому данная категория электрических машин относится к категории бесколлекторных электродвигателей.
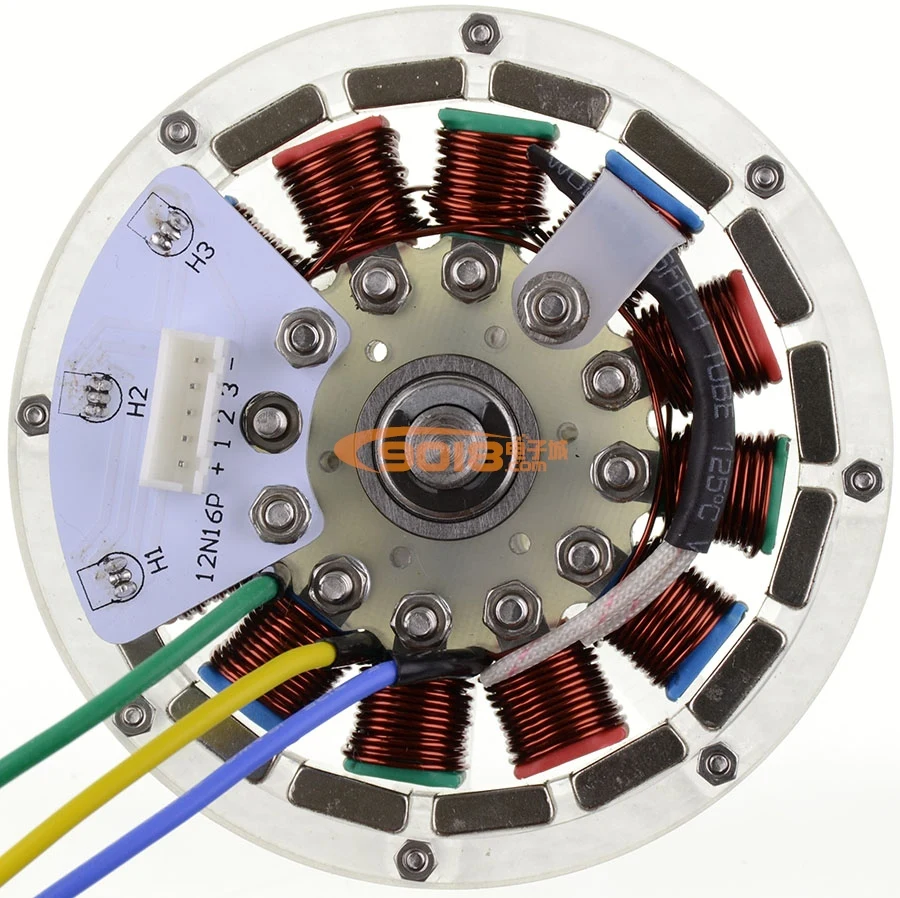
Статор
Рис. 2. Конструкция статора вентильного двигателяКонструктивно статор мало чем отличается от классических моделей синхронных и асинхронных двигателей. Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Это металлический цельнолитой или наборной магнитопровод, в пазах которого укладываются фазные провода. Количество обмоток якоря определяется числом подключаемых фаз и периодичностью их чередования. Чем чаще уложены обмотки статора, тем точнее контролируется вращение вентильного электродвигателя.
Полюса статора также могут характеризоваться смещением на строго определенный угол, как и его обмотки. По количеству фаз коммутации вентильные двигатели бывают двух-, трех-, четырех- и шестифазными.
Ротор
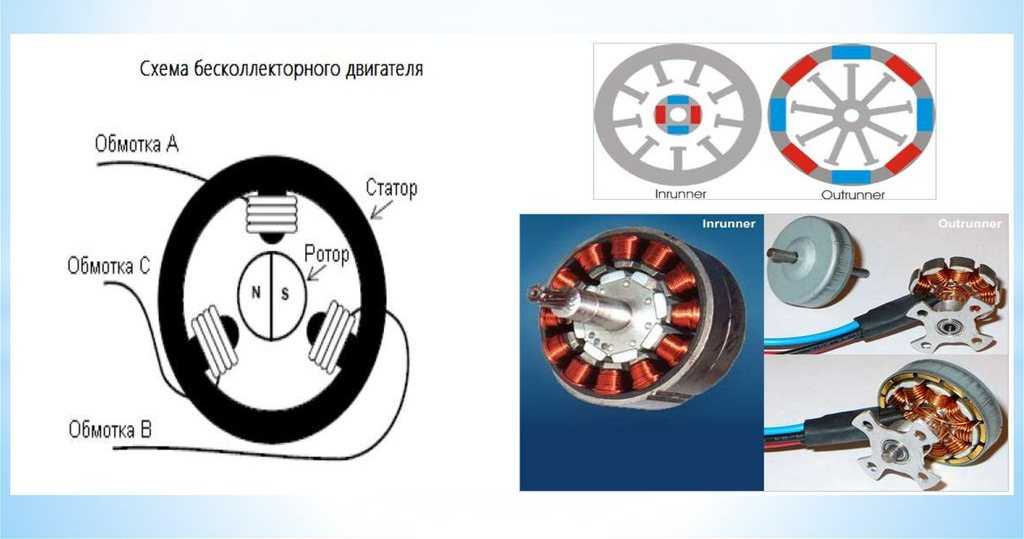
В зависимости от конструкции ротора бесконтактные двигатели могут иметь внутрироторное и внешнероторное исполнение.
Рис. 3. Внешнероторные и внутрироторные моделиКоличество пар полюсов также может отличаться, но уже без каких-либо привязок к обмоткам, как правило, этот параметр варьируется от двух до шестнадцати с парным шагом.
В более старых моделях для бесколлекторных двигателей использовались постоянные магниты из ферритовых сплавов. Которые отличались доступностью и относительно более низкой себестоимостью, но имели слишком низкие показатели индукции. Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
Однако с постепенным развитием технологий, на смену им пришли магнитные элементы из редкоземельных металлов. Этот вариант обладает более точным позиционированием, но и стоит он дороже.
Датчик положения ротора
В синхронных электродвигателях датчик необходим для осуществления обратной связи с положением вала механического устройства. В зависимости от принципа действия могут применяться датчики:
- Фотоэлектрического принципа действия;
- Трансформаторного;
- Индуктивного;
- На эффекте Холла.
Наиболее распространенными вариантами для практической реализации стали фотоэлектрические датчики и датчики с эффектом Холла. Они обладают большей точностью и меньше запаздывают при передаче данных в канале связи. Датчики привязываются к определенным маркерам на валу и реагируют на их прохождение.
Система управления
В состав блока управления, как правило, входит микроконтроллер и электронный ключ для подключения к двух- или трехфазным обмоткам двигателя. Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
Микроконтроллер или микропроцессор необходим для обработки получаемых с датчиков сигналов и последующего преобразования синусоидальной коммутации в более удобную форму сигнала. Электрические преобразователи выполняется на базе полупроводниковых транзисторов, соединенных по мостовой схеме. Они производят широтно-импульсную модуляцию питающего напряжения в соответствии с заданным режимом работы.
Классификация
По типу питания вентильные электрические машины подразделяются на электродвигатели постоянного и переменного тока.
По способу взаимодействия магнитного поля статора и ротора встречаются синхронные, асинхронные и индукторные аппараты.
Помимо этого, в зависимости от числа задействованных фаз они разделяются на:
- Однофазные – представляю собой наиболее простой вариант, где используется минимум линий передачи питающего напряжения от блока управления к его обмоткам. Однако в некоторых позиция существует трудность пуска такого вентильного двигателя под нагрузкой.

- Двухфазные – обладают хорошей связью между обмоткой и статором. Но выдают довольно сильные пульсации, которые могут привести к негативным последствиям в работе.
- Трехфазные – наиболее распространенные варианты, способные выдать плавный пуск и нормальный режим работы вентильного двигателя. Характеризуется четным количеством обмоток и хорошими тяговыми характеристиками. К его недостаткам относят лишь чрезмерный шум во время работы.
- Четырехфазные – характеризуются минимальными пульсациями низким пусковым моментом. Но, в сравнении с другими моделями, они имеют высокую себестоимость, из-за чего применяются редко.
Технические характеристики
При выборе конкретной модели важно определить ее соответствие месту установки, поэтому важно обращать внимание на следующие характеристики вентильных двигателей:
- номинальное напряжение – определяет питающую величину, которая должна подаваться на вентильный двигатель для получения номинального усилия;
- потребляемая мощность – характеристика электродвигателя, показывающая величину мощности, расходуемую на работу устройства;
- КПД – показывает соотношение полезной работы, совершаемой вентильным двигателем к израсходованной мощности;
- мощность на валу – полезная работа электрической машины, совершаемая за счет тягового усилия;
- номинальная частота – определяет количество оборотов в минуту, которые вентильный двигатель может совершать в номинальном режиме работы;
- диапазон регулировки частоты – показывает, в каких пределах можно изменять частоту оборотов вала для конкретной модели;
- номинальный крутящий момент – определяет усилие, создаваемое на валу вентильного двигателя при оптимальных параметрах работы, также в параметрах может регламентироваться пусковой и максимальный момент;
- коэффициент нагрузки – показывает, насколько снижается эффективность электрической машины, в зависимости от подъема над уровнем моря;
- габаритные размеры и масса вентильного двигателя.

Преимущества и недостатки
В сравнении с другими типами электрических машин, вентильный двигатель имеет ряд качественных отличий, дающих ему как выгодное, превосходство, так и определенные недостатки.
К преимуществам вентильных двигателей относят:
- Относительно небольшая величина магнитных потерь из-за отсутствия постоянно действующего поля, как в классических синхронных и асинхронных электродвигателях.
- Обеспечивает безопасное вращение даже с максимальной нагрузкой, в отличии от коллекторных электродвигателей.
- За счет встроенного преобразователя частоты коммутация вентильного преобразователя обеспечивает широкий спектр скоростей вращения, которые отличаются плавным переходом от одной к последующей.
- Хорошая динамика работы и точность позиционирования, способная создать конкуренцию шаговым двигателям.
- Относительно большая степень надежности и длительный срок эксплуатации без обслуживания за счет отсутствия скользящего контакта, в отличии от коллекторных двигателей.

- Может применяться во взрывоопасной среде, в отличии от электродвигателей постоянного и переменного тока со щетками.
К недостаткам вентильных агрегатов следует отнести их высокую себестоимость, наличие дополнительных элементов, усложняющих последующую эксплуатацию. Также существенным минусом считается сложность управления и задания логики перемещения рабочих органов трехфазных бесколлекторных двигателей в соответствии с меняющимися факторами производственного процесса.
Применение
Вентильные двигатели применяются во всех сферах, где требуется регулировать скорость вращения рабочего элемента. Такие синхронные приводы имеют точное позиционирование и применяются для компьютерной техники, устройств привода, винчестера, куллеров обдува и т.д.
Рис. 8. Вентильный двигатель в компьютереПомимо этого он используется в робототехнике, строительстве спутников, летательных аппаратов. Для бытовой техники, в устройствах автомобилестроения, в медицинской сфере. Также нашел широкое применение в станочном оборудовании, горнодобывающих машинах, используется в компрессорных установках и насосных станциях.
Вентильные двигатели. Виды и устройство. Работа и применение
Электродвигатели, работающие от постоянного тока, обычно обладают более высокими экономическими и техническими характеристиками, по сравнению с двигателями переменного тока. Единственным серьезным недостатком является наличие щеточного механизма, существенно понижающего надежность всей конструкции, повышающего инерционность ротора, взрывоопасность двигателя, а также создает радиопомехи.
Поэтому были созданы бесконтактные двигатели, работающие от постоянного тока, которые получили название вентильные двигатели. Создание такого нового устройства стало возможным, благодаря появлению полупроводников. Щеточный механизм в этой конструкции заменен коммутатором на основе полупроводниковых элементов. Якорь является неподвижным элементом, а на роторе закреплены постоянные магниты.
В целом вентильные двигатели включают в себя три подсистемы:
- Электронную.
- Механическую.
- Электрическую.

В результате получается мехатронное устройство, которое позволяет сделать корпус более компактным, избавиться от дополнительных деталей, лишних преобразователей, а соответственно сделать весь привод механизма более надежным.
Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла.
РоторОснову этого элемента составляет многополюсный постоянный магнит, который может иметь разное количество пар полюсов (от 2 до 8), с чередованием полюсов. Поначалу для производства роторов применяли ферритовые магниты невысокой стоимости. Однако ферритовые магниты имеют недостаток в том, что у них низкое значение магнитной индукции.
Современные конструкции роторов оснащают магнитами, изготовленными из редкоземельных элементов. Они дают возможность получить большую магнитную индукцию, а также сделать ротор более компактным.
Они дают возможность получить большую магнитную индукцию, а также сделать ротор более компактным.
Вентильный электродвигатель обычно имеет статор, состоящий из 3-х обмоток, соединенных «звездой» без отвода от средней точки, и внешне похожий на статор асинхронного мотора. Существуют вентильные двигатели со статором с большим количеством обмоток, а кроме схемы «звезды» их могут соединять «треугольником». Трехфазная структура обмоток считается наиболее эффективной при наименьшем количестве обмоток.
Если сравнивать две рассмотренные схемы соединения, то схема «звезды» предполагает больший момент вращения и меньшие показатели противо-ЭДС, в отличие от схемы «треугольника». Поэтому «звезду» чаще всего применяют для получения больших крутящих моментов, а «треугольник» — больших скоростей вращения.
Датчики положения и термодатчикЭтот чувствительный элемент создает обратную связь, и определяет положение ротора. Такие датчики могут работать по разным принципам – эффекта Холла, фотоэлектрическому и т. д. Большое распространение получили фотоэлектрические и датчики Холла. Они не имеют инерционности и дают возможность работы без запаздывания при определении положения ротора.
д. Большое распространение получили фотоэлектрические и датчики Холла. Они не имеют инерционности и дают возможность работы без запаздывания при определении положения ротора.
Фотоэлектрический датчик в его стандартном виде имеет три стационарных фотоприемника. Они по очереди закрываются шторкой, которая крутится синхронно ротору. Двоичный код, поступающий от датчиков, фиксирует шесть разных положений ротора. Управляющее устройство преобразует сигналы датчиков в управляющие импульсы напряжений, которые в свою очередь управляют полупроводниковыми ключами.
В каждый рабочий такт мотора включены два силовых ключа, и к электроэнергии подключены две обмотки из трех. Якорные обмотки расположены со сдвигом 120 градусов, и соединены между собой так, что при управлении силовыми ключами образуется вращающееся магнитное поле.
Дополнительно в вентильном двигателе могут иметься термодатчик, тормозной механизм. Тахогенератор используется в случае работы мотора в режиме стабилизации скорости с большой точностью.
Термодатчик служит для предохранения обмоток от перегрева, и включает в себя несколько позисторов, соединенных друг с другом между собой последовательно. Позисторы – резисторы, сопротивление которых зависит от температуры, чем больше температура, тем выше их сопротивление.
Принцип действияКонтроллер вентильного двигателя подключает обмотки статора так, что направление магнитного поля статора всегда перпендикулярно направлению поля ротора. Благодаря широтно-импульсной модуляции контроллер управляет током, который проходит по обмоткам. В результате создается момент вращения ротора, который регулируется.
ВидыВентильные двигатели бывают постоянного и переменного тока. Кроме того, их разделяют на виды по числу фаз:
- Однофазные. Это наиболее простая конструкция вентильных двигателей с минимальным числом связей между электронной системой и мотором. К недостаткам однофазных двигателей относятся большие пульсации, невозможность пуска при некоторых положениях ротора.
 Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы.
Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы. - Двухфазные. Такие вентильные двигатели работают в механизмах, где обязательно наличие связи обмотки и статора. К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям.
- Трехфазные. Эта дисковая конструкция мотора применяется для создания момента вращения, не применяя для этого большое число фаз. Этот вид моторов используется во многих отраслях промышленности, а также в бытовых условиях. Это наиболее распространенная конструкция, по сравнению с другими. Трехфазные двигатели вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для устройств, где требуется сочетание небольшой скорости и высокой мощности. Недостатками 3-фазных вентильных моторов является высокий уровень шума.
- 4-фазные. У таких двигателей значительно уменьшен момент вращения и пульсаций.
 Используются они достаточно редко, так как они имеют высокую стоимость.
Используются они достаточно редко, так как они имеют высокую стоимость.
Вентильные двигатели применяются во многих областях производства, например, на буровых установках, в системах охлаждения на химических заводах, на нефтяных скважинах.
Достоинства- Небольшие потери энергии, благодаря малому магнитному сопротивлению.
- Высокая безопасность при работе на максимальных нагрузках.
- Широкий интервал рабочих скоростей.
- Высокая точность работы и динамика.
- Плавное переключение скоростей.
- Нет коллекторного щеточного узла, который требует техобслуживания.
- Возможность применения в агрессивной среде.
- Длительный срок службы.
- Высокая надежность.
- Сложное управление.
- Высокий показатель шума.
- Высокая стоимость, в отличие от других аналогичных моторов, так как используются полупроводниковые силовые ключи.
Похожие темы:
- Электродвигатели постоянного тока.
 Устройство и работа. Виды
Устройство и работа. Виды - Асинхронные электродвигатели. Виды и устройство. Работа
- Синхронные электродвигатели. Работа и применение. Особенности
- Магнитные двигатели. Виды и устройство. Применение и работа
- Микродвигатели. Виды и устройство. Подключения и особенности
- Шаговые электродвигатели. Виды и работа. Особенности
- Электродвигатель. Виды и применение. Работа и устройство
- Сельсины. Виды и особенности. Режимы работы
Разница между щеточными и бесщеточными двигателями – Progressive Automations
Ежедневно машины и орудия в нашем окружении часто используют щеточные и бесщеточные двигатели постоянного тока для обеспечения вращательного движения. Оба мотора внешне могут выглядеть одинаково, однако их конструкция и работа сильно различаются. Чтобы получить наилучшие результаты, важно выбрать правильный двигатель и обеспечить правильную конфигурацию для вашего приложения. В этой статье мы рассмотрим разницу между щеточными и бесщеточными двигателями, чтобы лучше понять, какой двигатель наиболее подходит для их применения. Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Мы также покажем, как подключить щеточные и бесщеточные электродвигатели к кулисным переключателям в целях тестирования.
Просмотрите все наши электрические линейные приводы, от микро до промышленных!
Коллекторный двигатель постоянного тока
Коллекторный двигатель постоянного тока состоит из нескольких основных компонентов, которые в сочетании с источником питания постоянного тока создают вращающийся двигатель. Конфигурацию якоря, коммутатора, щеток и магнита возбуждения можно увидеть на рисунке 1 ниже.
Рис. 1. Чертеж (слева) и фактический пример (справа) коллекторных двигателей постоянного тока
На нашем чертеже показан упрощенный якорь, чтобы было легче увидеть протекающий через него ток; однако щеточные двигатели постоянного тока будут иметь несколько обмоток катушки с якорем. Щетки заряжают коммутатор, который пропускает ток через якорь в противоположной полярности постоянного магнита.
Коллекторные двигатели постоянного тока просты в эксплуатации, поскольку являются одними из самых простых типов двигателей, однако их срок службы короче, чем у бесщеточных двигателей. Из-за того, что щетки имеют физический контакт с коллектором, искрение является распространенной проблемой для щеточных двигателей. Этот физический контакт также со временем изнашивает щетки и приводит к некоторой потере энергии из-за возникающего трения.
Выберите правильную систему управления для вашего привода из нашего большого ассортимента!
Контроллер бесщеточного двигателя постоянного тока
Бесщеточный двигатель постоянного тока (BLDC) устраняет основные недостатки его щеточного аналога. Двигатель состоит из постоянных магнитов и катушек, которые через серию идеально синхронизированных интервалов подачи питания заставляют постоянный магнит в центре вращаться вокруг катушек, окружающих его.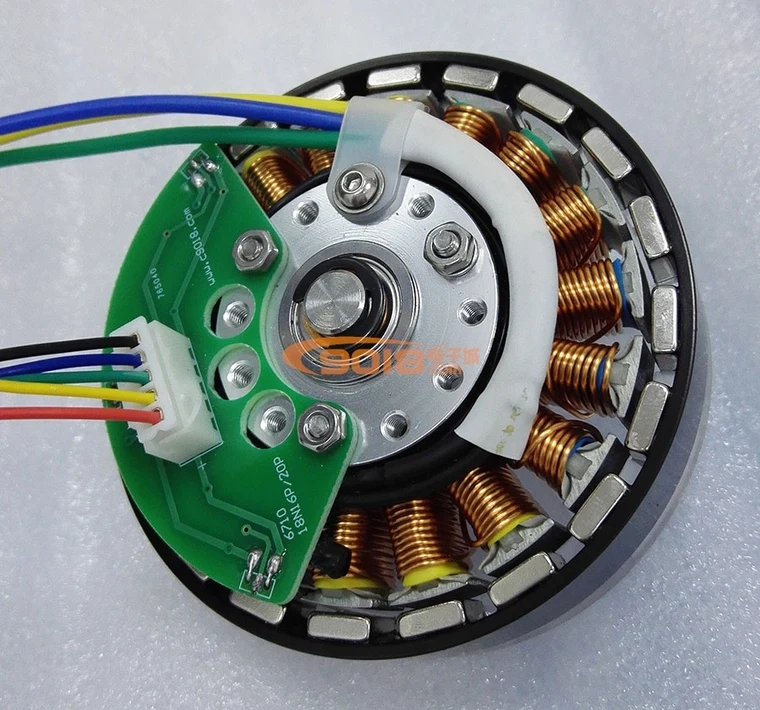 Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Мы включили схему бесщеточного двигателя для справки на рис. 2 ниже.
Рисунок 2: Чертеж (слева) и фактический пример (справа) бесколлекторных двигателей постоянного тока
На катушки бесщеточного двигателя подается питание в определенной последовательности (рис. 3), что приводит к вращению постоянных магнитов на роторе. Это делается без какого-либо физического контакта и позволяет использовать более эффективный и долговечный двигатель постоянного тока.
Рис. 3. Последовательность подачи питания на катушки
Для того чтобы обеспечить выходной сигнал, показанный на Рис. 3, бесщеточному двигателю постоянного тока требуется электронный блок управления (ЭБУ), определяющий положение ротора и катушки, на которые подается питание.
В отличие от коллекторных двигателей постоянного тока, для вращения которых требуется напряжение 12 В постоянного тока, приложенное непосредственно к двигателю, для бесщеточных двигателей постоянного тока требуется трехфазное питание. Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Это означает, что контроллер бесщеточного двигателя постоянного тока должен выдавать соответствующую мощность на различные катушки для обеспечения вращения. При использовании нашего контроллера бесщеточного двигателя постоянного тока LC-241 на входные клеммы можно подать напряжение постоянного тока 12 В при токе 5 А с помощью источника питания. Затем он преобразуется в 3-фазное питание для управления нашими бесколлекторными моторами. В следующем разделе базовая схема подключения поможет при тестировании бесщеточного привода постоянного тока.
Подключение бесщеточных двигателей к кулисным переключателям
Progressive Automations в настоящее время предлагает мини-линейный привод PA-14 в варианте бесщеточного постоянного тока для индивидуальных заказов. Схема подключения бесщеточных приводов PA-14 показана на рисунке 4 ниже.
Рис. 4. Схема подключения бесщеточного привода PA-14
Шаг 1
Подсоедините 3 провода контроллера двигателя от бесщеточного привода PA-14 к контроллеру бесщеточного двигателя постоянного тока LC-241. Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Провода обычно зеленого, синего и белого цвета, которые подключаются к клеммам U, V и W соответственно. Убедитесь, что соединения бесщеточного двигателя надежно закреплены. Если провода разного цвета, подключение их в неправильном порядке просто приведет к перемещению электрического линейного привода в направлении, противоположном предполагаемому.
Шаг 2
Подключите контакт SPD к заземлению источника питания 12 В постоянного тока, чтобы включить встроенный потенциометр для управления скоростью. Убедитесь, что этот потенциометр повернут по часовой стрелке на полную скорость.
Шаг 3
Подключите контакт GND к контактам Common на кулисном переключателе.
Шаг 4
Подсоедините контакт RUN к обеим сторонам тумблера. Это важно, так как и вперед, и назад для работы требуется, чтобы контакт RUN контактировал с землей.
Шаг 5
Подсоедините контакт REV к одной стороне тумблера. Эта сторона будет обратной стороной тумблера.
Шаг 6
Подайте 12 В постоянного тока на контроллер бесщеточного двигателя постоянного тока, при первом включении питания слышен шум индикатора.
Рис. 5. Физическая проводка бесщеточного привода PA-14
Базовая настройка завершена; с помощью кулисного переключателя привод можно выдвигать и втягивать. Проблема с приводом бесщеточного двигателя постоянного тока заключается в том, что внутренние концевые выключатели не могут остановить подачу питания к приводу, как это происходит с щеточными двигателями постоянного тока. Это связано с тем, что на бесколлекторный двигатель PA-14 подается трехфазное питание. Бесколлекторный электропривод PA-14 оснащен встроенным концевым выключателем с обратной связью, который можно использовать с ПЛК или микроконтроллером для индикации того, что привод находится в конце хода. Обратная связь действует как нормально замкнутый на нормально открытый переключатель, который необходим для интеграции бесщеточного привода PA-14 в реальные приложения.
У нас также есть статья о непрерывном удлинении и втягивании хода привода с бесщеточным двигателем постоянного тока для справки с примерами кодирования.
Подключение щеточных двигателей к кулисным переключателям
Большинство наших электрических линейных приводов поставляются с щеточными двигателями постоянного тока. Простота эксплуатации коллекторных двигателей постоянного тока позволяет подключать кулисные переключатели между источником питания постоянного тока и коллекторным двигателем без необходимости в дополнительном контроллере.
Рисунок 6: Схема подключения кулисного переключателя к приводу с щеточным двигателем подключен к земле блока питания.
Этот тип проводки выключателя привода позволяет оператору изменять направление потока электрического тока, поступающего в привод, для изменения направления движения. В качестве физического примера схемы подключения исполнительного механизма с кулисным переключателем это видео является отличным примером. Рис. 7. Физическая проводка кулисного переключателя к приводу с коллекторным двигателем
Хотите внедрить автоматизацию в свой дом? Взгляните на наши продукты для домашней автоматизации!
Коллекторные двигатели постоянного тока имеют катушки в центре, вращающиеся вокруг постоянных магнитов, в то время как бесщеточные двигатели постоянного тока имеют в центре постоянный магнит, который вращается вокруг катушек. Конструкция бесщеточного двигателя лучше подходит для приложений, которые будут использовать его более длительный срок службы и большую энергоэффективность. Для более простой и легкой работы в приложениях с коротким временем цикла можно воспользоваться удобной конструкцией коллекторных двигателей постоянного тока. Если у вас есть какие-либо вопросы или вы хотите обсудить наши продукты, пожалуйста, не стесняйтесь обращаться к нам! Мы являемся экспертами в том, что мы делаем, и хотим, чтобы вы нашли лучшее решение для вашего приложения. [email protected] | 1-800-676-6123 Бесщеточный двигатель — это электродвигатель, работающий на постоянном токе (DC) и не имеющий механических щеток и коллектора, как у обычной щетки. мотор. Хотя первоначальные затраты выше, он предлагает очевидные преимущества по сравнению со щеточным двигателем и является более рентабельным в долгосрочной перспективе. Бесщеточные двигатели используются в различных бестраншейных строительных работах. Бесщеточные двигатели иногда называют двигателями BLDC или BL. Электронно-коммутируемые двигатели (ECM, EC-двигатели) и синхронные двигатели постоянного тока являются синонимами. С 1856 года щеточные двигатели постоянного тока использовались в электрических силовых установках, кранах, бумагоделательных машинах и сталепрокатных заводах, и они все еще широко используются сегодня. Бесщеточные двигатели постоянного тока с электронными регуляторами скорости в значительной степени заменили щеточные двигатели во многих приложениях, поскольку их щетки изнашиваются и требуют частой замены. Из-за высоких требований к применению и сильного шума электрического разряда (называемого электростатическим разрядом, особенно в аэрокосмической технике) износ щеток стал серьезным недостатком, и был произведен новый двигатель. Бесколлекторные двигатели намного новее, они были изобретены на заре изобретения электричества. Первый бесщеточный двигатель постоянного тока (BLDC), названный Т.Г. Уилсон и П.Х. Трики был изобретен в 1962 году в результате достижений в области твердотельных технологий в начале 1960-х годов. Недостатком первых бесщеточных двигателей было то, что они не могли генерировать большую мощность, несмотря на свою долговечность. Бесщеточные двигатели могли генерировать столько же (или больше) мощности, сколько и щеточные двигатели, до того, как в 1980-х годах стали доступны более сильные материалы с постоянными магнитами. Роберт Э. Лордо изготовил первый крупногабаритный бесщеточный двигатель постоянного тока в конце 1980-х годов, мощность которого в десять (10) раз превышала мощность предыдущих бесщеточных двигателей. Рекомендуемое содержимое: 🟡 Что такое электродвигатели и как они работают? Современные бесщеточные двигатели преодолевают многие недостатки щеточных двигателей за счет сочетания более высокой выходной мощности, меньшего размера и веса, улучшенного рассеивания тепла и эффективности, более широкого диапазона рабочих скоростей и чрезвычайно низкого электрического шума. Статор типичного бесщеточного двигателя имеет трехфазную обмотку, а ротор содержит постоянный магнит. Он также доступен в однофазной, двухфазной и трехфазной конфигурациях. Как указывалось ранее, обмотка статора создает вращающееся магнитное поле, которое толкает магнитный ротор вперед. Для создания этого магнитного поля на катушку подается трехфазное напряжение. Итак, как система различает, какие катушки запитаны, а какие должны быть? Для этой цели используется специальный электрический контроллер. Включение тока в ортогональные (перпендикулярные) обмотки осуществляется таким интегрированным коммутационным механизмом. Он также имеет датчики, которые определяют местоположение ротора. 📌 T Контроллер изменяет соединение двух фаз для изменения направления вращения. Его также можно использовать в качестве сервопривода или шагового двигателя. По сравнению с щеточными двигателями бесщеточные двигатели имеют ряд преимуществ: широкий диапазон скоростей; Несмотря на множество преимуществ бесколлекторных двигателей, у них есть и ряд недостатков: Бесщеточные двигатели выполняют многие функции, которые раньше выполняли коллекторные двигатели постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменить коллекторные двигатели в недорогих секторах. Бесколлекторные двигатели, с другой стороны, стали доминировать во многих приложениях, включая компьютерные жесткие диски и CD/DVD-плееры. Бесщеточные двигатели используются исключительно для питания небольших охлаждающих вентиляторов в электрических устройствах. Они распространены в беспроводных электроинструментах, где повышенная эффективность двигателя позволяет использовать его в течение длительного времени без перезарядки аккумулятора. В проигрывателях с прямым приводом для граммофонных пластинок используются низкоскоростные маломощные бесщеточные двигатели. Многие современные аккумуляторные инструменты используют бесщеточные двигатели, в том числе струнные триммеры, воздуходувки, дисковые и сабельные пилы, дрели/шуруповерты. Бесщеточные двигатели для начинающих обеспечивают исключительную производительность и длительный срок службы. Эти типы требуются в приложениях, где требуется высокая скорость вращения и устойчивость к перегреву. Такое оборудование используется в роботах, медицинском оборудовании, станках с ЧПУ и другом дорогостоящем и ответственном промышленном оборудовании как часть системы охлаждения. Бесщеточные устройства того же размера более мощные, чем щеточные. Он также используется в ситуациях, когда требуются долговечные электродвигатели, не требующие особого обслуживания. Коллекторные двигатели постоянного тока имеют меньшую мощность и стабильность, чем щеточные двигатели постоянного тока. Часто задаваемые вопросы ❓ Как вы интерпретируете цифры на бесщеточном двигателе? Сколько магнитов в бесщеточном двигателе? Как определить размер бесщеточного двигателя? Лучше ли аккумуляторные инструменты с бесщеточными двигателями? Каков ожидаемый срок службы бесщеточных двигателей? 
Резюме

Все о бесщеточных двигателях в деталях —
Бесщеточные двигатели обычно устроены так же, как и синхронные двигатели с постоянными магнитами (СДПМ), хотя они также могут быть переключающими реактивными двигателями или асинхронными двигателями. Они также могут быть бегунками (ротор окружен статором), бегунами (ротор окружен статором) или осевыми бегунами (ротор окружен статором) (ротор и статор плоские и параллельные).
Коллекторные и бесщеточные двигатели во времени
 Бесщеточные двигатели являются наиболее предпочтительным выбором для компьютерных дисководов, робототехники и самолетов, поскольку они не требуют физического коммутатора.
Бесщеточные двигатели являются наиболее предпочтительным выбором для компьютерных дисководов, робототехники и самолетов, поскольку они не требуют физического коммутатора. Современные бесщеточные двигатели
 Бесщеточные двигатели не имеют электрических соединений, которые могут изнашиваться, что обеспечивает большую надежность и более короткие интервалы технического обслуживания в коммерческих и промышленных приложениях.
Бесщеточные двигатели не имеют электрических соединений, которые могут изнашиваться, что обеспечивает большую надежность и более короткие интервалы технического обслуживания в коммерческих и промышленных приложениях. Основные аспекты и конструкция бесщеточных двигателей
 Чаще всего используются датчики Холла, однако также используются фотоэлектрические, индуктивные датчики и резольверы.
Чаще всего используются датчики Холла, однако также используются фотоэлектрические, индуктивные датчики и резольверы. Бесщеточные двигатели постоянного тока Преимущества:

Недостатки бесколлекторного двигателя
Аккумуляторный инструмент, такой как дрель 
Бесщеточные двигатели Применение
Аккумуляторные инструменты
 Бесщеточные двигатели имеют больше преимуществ по сравнению с щеточными двигателями (малый вес, высокая эффективность) для портативного оборудования с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому внедрение в этой части рынка было более быстрым.
Бесщеточные двигатели имеют больше преимуществ по сравнению с щеточными двигателями (малый вес, высокая эффективность) для портативного оборудования с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому внедрение в этой части рынка было более быстрым. Какой вариант лучше, щеточный или бесщеточный?
 Однако это недорого и просто. В результате гаджеты не выполняют сложных или длительных действий. В быту такая технология используется в автомобилях, грузоподъемных механизмах, детских радиоуправляемых моделях и различных предметах быта (например, дрели). Из-за трения щеток и быстрого износа они требуют регулярного обслуживания, однако они очень долговечны в сложных промышленных условиях.
Однако это недорого и просто. В результате гаджеты не выполняют сложных или длительных действий. В быту такая технология используется в автомобилях, грузоподъемных механизмах, детских радиоуправляемых моделях и различных предметах быта (например, дрели). Из-за трения щеток и быстрого износа они требуют регулярного обслуживания, однако они очень долговечны в сложных промышленных условиях.
Бесщеточные двигатели обычно обозначаются четырехзначным кодом, например , где обозначает ширину статора, а обозначает высоту статора. По сути, чем больше число и чем больше крутящий момент может создать двигатель, тем он шире и выше.
Две катушки печатной платы взаимодействуют с шестью круговыми постоянными магнитами блока вентиляторов.
При определении размера бесщеточного двигателя постоянного тока проще всего начать с подбора размера двигателя (диаметра, длины). Диаметр колеблется от 13 до 30 миллиметров. Диаметр и длина бесщеточных щелевых двигателей постоянного тока измеряются в дюймах.
Бесщеточные двигатели во многих отношениях превосходят щеточные двигатели. Пользователи могут извлечь выгоду из снижения затрат на техническое обслуживание, повышения эффективности, а также меньшего количества тепла и шума.
Если вам нужен двигатель, который прослужит долго, используйте бесщеточный двигатель.
