Что такое вентильный двигатель постоянного тока. Как устроен вентильный двигатель. Какие преимущества имеют вентильные двигатели перед коллекторными. Где применяются вентильные двигатели постоянного тока. Какие виды вентильных двигателей существуют.
Что такое вентильный двигатель постоянного тока
Вентильный двигатель постоянного тока (ВДПТ) представляет собой бесколлекторный электродвигатель, в котором щеточно-коллекторный узел заменен электронным коммутатором. Несмотря на название, ВДПТ является синхронной машиной переменного тока с постоянными магнитами на роторе.
Основные особенности вентильных двигателей:
- Ротор с постоянными магнитами
- Статор с обмотками
- Электронный коммутатор вместо щеток
- Датчики положения ротора
- Система управления
Благодаря такой конструкции ВДПТ сочетают преимущества двигателей постоянного и переменного тока.
Принцип работы вентильного двигателя
Принцип работы ВДПТ основан на взаимодействии магнитных полей статора и ротора. Вращающееся магнитное поле статора создается с помощью электронной коммутации обмоток. Система управления анализирует сигналы от датчиков положения ротора и подает напряжение на нужные обмотки статора, создавая вращающееся магнитное поле.

Ключевые этапы работы вентильного двигателя:
- Определение положения ротора датчиками
- Анализ сигналов датчиков системой управления
- Подача напряжения на соответствующие обмотки статора
- Создание вращающегося магнитного поля статора
- Взаимодействие полей статора и ротора, вызывающее вращение
Такой принцип обеспечивает высокую эффективность и управляемость вентильных двигателей.
Преимущества вентильных двигателей
По сравнению с коллекторными двигателями постоянного тока, вентильные двигатели имеют ряд существенных преимуществ:
- Высокий КПД (до 90-95%)
- Большой диапазон регулирования скорости
- Высокая динамика
- Малые массогабаритные показатели
- Длительный срок службы
- Низкий уровень шума и вибраций
- Возможность работы в агрессивных средах
Отсутствие щеточно-коллекторного узла позволяет повысить надежность и уменьшить затраты на обслуживание ВДПТ.
Виды вентильных двигателей
Выделяют несколько основных видов вентильных двигателей:
По расположению ротора:
- С внутренним ротором
- С внешним ротором
По конструкции статора:
- Со щелевой обмоткой
- С беспазовым статором
По числу фаз:
- Однофазные
- Двухфазные
- Трехфазные
Выбор конкретного типа ВДПТ зависит от требований конкретного применения.

Области применения вентильных двигателей
Благодаря своим преимуществам, вентильные двигатели постоянного тока широко применяются в различных отраслях:
- Промышленные приводы и автоматика
- Бытовая техника
- Медицинское оборудование
- Авиационная и космическая техника
- Робототехника
- Электротранспорт
- Компьютерная техника
ВДПТ особенно эффективны в системах с высокими требованиями к точности регулирования скорости и позиционирования.
Управление вентильными двигателями
Существует несколько способов управления вентильными двигателями постоянного тока:
1. Блочная коммутация
Простейший метод, основанный на использовании датчиков Холла для определения положения ротора. Обмотки переключаются дискретно, что приводит к пульсациям момента.
2. Синусоидальная коммутация
Более совершенный метод, при котором обмотки питаются синусоидальным напряжением. Обеспечивает плавное вращение и меньшие пульсации момента.
3. Векторное управление
Наиболее эффективный метод, позволяющий независимо управлять моментом и потокосцеплением двигателя. Обеспечивает высокую динамику и точность регулирования.
Выбор метода управления зависит от требований к характеристикам привода и сложности системы управления.
Особенности конструкции вентильных двигателей
Конструкция вентильного двигателя постоянного тока имеет ряд особенностей:
- Ротор с постоянными магнитами из редкоземельных материалов
- Статор с распределенной обмоткой
- Датчики положения ротора (датчики Холла, энкодеры)
- Электронный коммутатор на силовых полупроводниковых ключах
- Микропроцессорная система управления
Такая конструкция обеспечивает высокие энергетические и динамические характеристики ВДПТ.
Перспективы развития вентильных двигателей
Вентильные двигатели постоянного тока продолжают активно развиваться. Основные направления совершенствования:
- Повышение энергоэффективности
- Улучшение массогабаритных показателей
- Снижение стоимости
- Разработка новых алгоритмов управления
- Интеграция с системами «умного» производства
Развитие технологий производства постоянных магнитов и силовой электроники способствует дальнейшему расширению области применения ВДПТ.

Вентильные двигатели. Виды и устройство. Работа и применение
Электродвигатели, работающие от постоянного тока, обычно обладают более высокими экономическими и техническими характеристиками, по сравнению с двигателями переменного тока. Единственным серьезным недостатком является наличие щеточного механизма, существенно понижающего надежность всей конструкции, повышающего инерционность ротора, взрывоопасность двигателя, а также создает радиопомехи.
Поэтому были созданы бесконтактные двигатели, работающие от постоянного тока, которые получили название вентильные двигатели. Создание такого нового устройства стало возможным, благодаря появлению полупроводников. Щеточный механизм в этой конструкции заменен коммутатором на основе полупроводниковых элементов. Якорь является неподвижным элементом, а на роторе закреплены постоянные магниты.
В целом вентильные двигатели включают в себя три подсистемы:
- Электронную.
- Механическую.
- Электрическую.
В результате получается мехатронное устройство, которое позволяет сделать корпус более компактным, избавиться от дополнительных деталей, лишних преобразователей, а соответственно сделать весь привод механизма более надежным.
Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла.
РоторОснову этого элемента составляет многополюсный постоянный магнит, который может иметь разное количество пар полюсов (от 2 до 8), с чередованием полюсов. Поначалу для производства роторов применяли ферритовые магниты невысокой стоимости. Однако ферритовые магниты имеют недостаток в том, что у них низкое значение магнитной индукции.
Современные конструкции роторов оснащают магнитами, изготовленными из редкоземельных элементов. Они дают возможность получить большую магнитную индукцию, а также сделать ротор более компактным.
СтаторВентильный электродвигатель обычно имеет статор, состоящий из 3-х обмоток, соединенных «звездой» без отвода от средней точки, и внешне похожий на статор асинхронного мотора.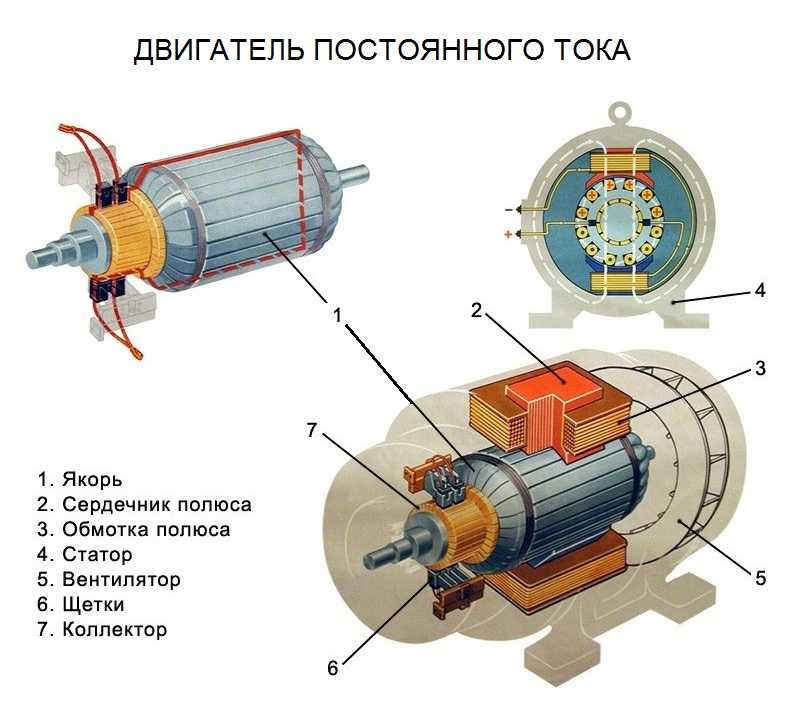 Существуют вентильные двигатели со статором с большим количеством обмоток, а кроме схемы «звезды» их могут соединять «треугольником». Трехфазная структура обмоток считается наиболее эффективной при наименьшем количестве обмоток.
Существуют вентильные двигатели со статором с большим количеством обмоток, а кроме схемы «звезды» их могут соединять «треугольником». Трехфазная структура обмоток считается наиболее эффективной при наименьшем количестве обмоток.
Если сравнивать две рассмотренные схемы соединения, то схема «звезды» предполагает больший момент вращения и меньшие показатели противо-ЭДС, в отличие от схемы «треугольника». Поэтому «звезду» чаще всего применяют для получения больших крутящих моментов, а «треугольник» — больших скоростей вращения.
Датчики положения и термодатчикЭтот чувствительный элемент создает обратную связь, и определяет положение ротора. Такие датчики могут работать по разным принципам – эффекта Холла, фотоэлектрическому и т.д. Большое распространение получили фотоэлектрические и датчики Холла. Они не имеют инерционности и дают возможность работы без запаздывания при определении положения ротора.
Фотоэлектрический датчик в его стандартном виде имеет три стационарных фотоприемника. Они по очереди закрываются шторкой, которая крутится синхронно ротору. Двоичный код, поступающий от датчиков, фиксирует шесть разных положений ротора. Управляющее устройство преобразует сигналы датчиков в управляющие импульсы напряжений, которые в свою очередь управляют полупроводниковыми ключами.
Они по очереди закрываются шторкой, которая крутится синхронно ротору. Двоичный код, поступающий от датчиков, фиксирует шесть разных положений ротора. Управляющее устройство преобразует сигналы датчиков в управляющие импульсы напряжений, которые в свою очередь управляют полупроводниковыми ключами.
В каждый рабочий такт мотора включены два силовых ключа, и к электроэнергии подключены две обмотки из трех. Якорные обмотки расположены со сдвигом 120 градусов, и соединены между собой так, что при управлении силовыми ключами образуется вращающееся магнитное поле.
Дополнительно в вентильном двигателе могут иметься термодатчик, тормозной механизм. Тахогенератор используется в случае работы мотора в режиме стабилизации скорости с большой точностью.
Термодатчик служит для предохранения обмоток от перегрева, и включает в себя несколько позисторов, соединенных друг с другом между собой последовательно. Позисторы – резисторы, сопротивление которых зависит от температуры, чем больше температура, тем выше их сопротивление.
Контроллер вентильного двигателя подключает обмотки статора так, что направление магнитного поля статора всегда перпендикулярно направлению поля ротора. Благодаря широтно-импульсной модуляции контроллер управляет током, который проходит по обмоткам. В результате создается момент вращения ротора, который регулируется.
ВидыВентильные двигатели бывают постоянного и переменного тока. Кроме того, их разделяют на виды по числу фаз:
- Однофазные. Это наиболее простая конструкция вентильных двигателей с минимальным числом связей между электронной системой и мотором. К недостаткам однофазных двигателей относятся большие пульсации, невозможность пуска при некоторых положениях ротора. Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы.
- Двухфазные. Такие вентильные двигатели работают в механизмах, где обязательно наличие связи обмотки и статора.
 К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям.
К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям. - Трехфазные. Эта дисковая конструкция мотора применяется для создания момента вращения, не применяя для этого большое число фаз. Этот вид моторов используется во многих отраслях промышленности, а также в бытовых условиях. Это наиболее распространенная конструкция, по сравнению с другими. Трехфазные двигатели вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для устройств, где требуется сочетание небольшой скорости и высокой мощности. Недостатками 3-фазных вентильных моторов является высокий уровень шума.
- 4-фазные. У таких двигателей значительно уменьшен момент вращения и пульсаций. Используются они достаточно редко, так как они имеют высокую стоимость.
Вентильные двигатели применяются во многих областях производства, например, на буровых установках, в системах охлаждения на химических заводах, на нефтяных скважинах.
- Небольшие потери энергии, благодаря малому магнитному сопротивлению.
- Высокая безопасность при работе на максимальных нагрузках.
- Широкий интервал рабочих скоростей.
- Высокая точность работы и динамика.
- Плавное переключение скоростей.
- Нет коллекторного щеточного узла, который требует техобслуживания.
- Возможность применения в агрессивной среде.
- Длительный срок службы.
- Высокая надежность.
- Сложное управление.
- Высокий показатель шума.
- Высокая стоимость, в отличие от других аналогичных моторов, так как используются полупроводниковые силовые ключи.
Похожие темы:
- Электродвигатели постоянного тока. Устройство и работа. Виды
- Асинхронные электродвигатели. Виды и устройство. Работа
- Синхронные электродвигатели. Работа и применение. Особенности
- Магнитные двигатели. Виды и устройство.
 Применение и работа
Применение и работа - Микродвигатели. Виды и устройство. Подключения и особенности
- Шаговые электродвигатели. Виды и работа. Особенности
- Электродвигатель. Виды и применение. Работа и устройство
- Сельсины. Виды и особенности. Режимы работы
Вентильные двигатели*
Вентильные двигатели*Мумиков А.Д. кафедра электромеханики, электрических и электронных аппаратов, Национальный исследовательский университет «МЭИ», г. Москва
Ключевые слова: электротехника, вентильные электродвигатели, эффективность
Вентильные двигатели успешно применяют в разных областях производства: на буровых установках, системах охлаждения в химической промышленности, нефтяных скважинах, приводах игрушек, транспорта, в бытовой технике. В отличие от машин постоянного тока, наличие щеточного аппарата в которых снижает их эффективность, беспроводные вентильные двигатели управляются электроникой.
Литература:
1. https://vunivere.ru / work14943/page9 [Электронный ресурс] (дата обращения: 06.02.2018).
2. http://dom-en.ru/realiz52/ [Электронный ресурс] (дата обращения: 05.02.2018).
3. http://electricalschool.info/ spravochnik/maschiny/ [Электронный ресурс] (дата обращения: 06.02.2018).
4. http://jurnal.org/articles/2015/ elect1.html [Электронный ресурс] (дата обращения: 08.02.2018).
5. https://mirprom.ru/public [Электронный ресурс] (дата обращения: 10.02.2018).
6. www.syl.ru/article/334155/ ventilnyiy-dvigatel-ustroystvo-i-print… [Электронный ресурс] (дата обращения: 10.02.2018).
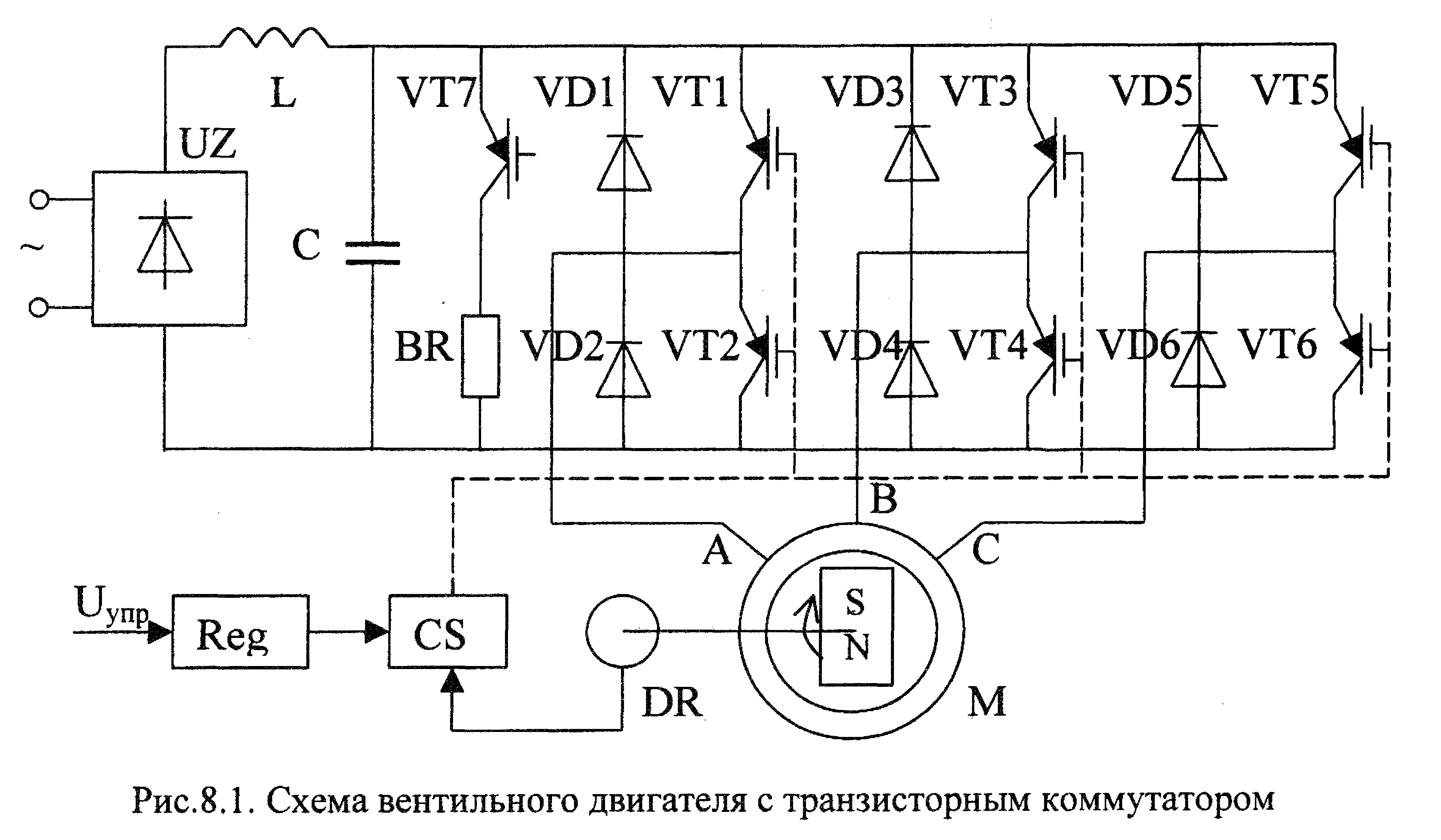
Вентильный двигатель (ВД) – это электродвигатель, в котором коллекторнощеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения. ВД работают от сети постоянного тока [1].
Бесконтактный двигатель – это система регулируемого электропривода, состоящая из электродвигателя, вентильного преобразователя и блока электронного управления, который коммутирует обмотки статора в зависимости от положения ротора.
Микроконтроллер, выполняющий роль устройства управления, регулирует вектор магнитного поля статора, учитывая положение ротора. Коммутация прибора реализуется при помощи вентильного преобразователя.
Вентильные двигатели – электрические машины, в которых частота вращения вала не зависит от частоты в сети. Частота вращения регулируется изменением потока возбуждения и тока в якоре.
Вентильные двигатели имеют ряд достоинств [1]:
1. потеря энергии минимальна вследствие небольшого магнитного сопротивления;
2. высокий уровень безопасности даже при самых высоких нагрузках обеспечивается отсутствием контактных элементов, искрением при коммутации;
3. широкий диапазон оборотов, мягкое переключение скоростей облегчает работу бытовых приборов и приводов в различных сферах производства;
4. бесщеточные двигатели имеют высокие показатели КПД и мощности;
5. отсутствие щеточного механизма не требует технического обслуживания, делает двигатель легче и компактнее;
6. бесколлекторные электродвигатели могут использоваться в агрессивной и взрывоопасной среде, что расширяет область их применения;
бесколлекторные электродвигатели могут использоваться в агрессивной и взрывоопасной среде, что расширяет область их применения;
7. высокая точность работы и динамика повышает эффективность прибора;
8. вентильные двигатели практически не создают радиопомех.
В то же время у вентильных двигателей есть и недостатки:
1. высокий уровень шума;
2. сложное управление инверторами;
3. высокая цена.
Чтобы разобраться в том, что собой представляет вентильный двигатель и как он работает, необходимо знать его устройство.
Для Цитирования:
Мумиков А.Д., Вентильные двигатели*. Электроцех. 2018;5.
Полная версия статьи доступна подписчикам журнала
Для Цитирования:
Мумиков А.Д., Вентильные двигатели*. Электроцех. 2018;5.
ФИО
Ваш e-mail
Ваш телефон
Нажимая кнопку «Получить доступ» вы даёте своё согласие обработку своих персональных данных
Ваше имя
Ваша фамилия
Ваш e-mail
Ваш телефон
Придумайте парольПароль еще раз
Запомнить меня
Информируйте меня обо всех новостях и спецпредложениях по почте
На указанный Вами номер телефона был отправлен код подтверждения.
Повторно запросить код можно будет через секунд.
Код подтверждения
На указанный Вами номер телефона был отправлен код подтверждения.Повторно запросить код можно будет через секунд.
Повторно запросить код можно будет через секунд.
Код подтверждения
Логин
Пароль
Ваше имя:
Ваш e-mail:
Ваш телефон:
Сообщение:
На сайте используется защита от спама reCAPTCHA и применяются Условия использования и Конфиденциальность Google
Использовать это устройство?
Одновременно использовать один аккаунт разрешено только с одного устройства.
Повторно запросить код можно будет через секунд.
Код подтверждения
×
Мы перевели вас на Русскую версию сайта
You have been redirected to the Russian version
Мы используем куки
Бесщеточные двигатели постоянного тока | Двигатели BLDC от NANOTEC
Бесщеточные двигатели постоянного тока, сокращенно называемые двигателями BLDC, несмотря на свое название, представляют собой трехфазные синхронные машины: ротор следует за магнитным вращательным полем, а движение синхронно с напряжением переменного тока, приложенным к обмоткам. Этот тип двигателя часто называют «бесщеточным двигателем постоянного тока», потому что во многих приложениях он заменяет двигатели постоянного тока щетками (щеточные двигатели постоянного тока или коллекторные двигатели).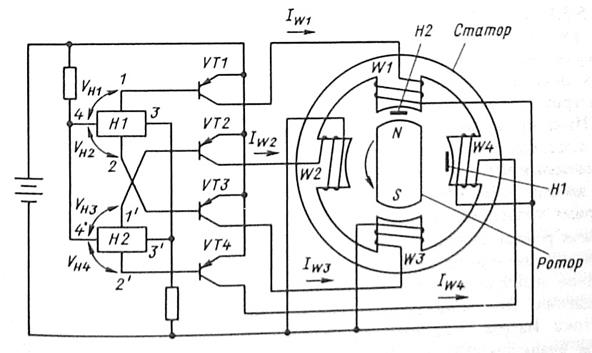 В щеточном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
В щеточном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
Вместе с электронным контроллером привода, который берет на себя управление работой щеток и преобразует подаваемый постоянный ток в переменный, двигатель BLDC обеспечивает производительность, сравнимую с работой коллекторного двигателя постоянного тока — без щеток, которые имеют ограниченный срок службы. Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличить их от двигателей с механической коммутацией и щетками.
Другим часто используемым термином является синхронный двигатель с постоянными магнитами. Здесь «постоянный магнит» используется, чтобы отличить его от других синхронных двигателей, которые работают с обмоткой возбуждения на роторе, тогда как BLDC постоянно находится под напряжением. Другими словами, ротор двигателя создает магнитное поле с помощью постоянного магнита, даже если статор не находится под напряжением.
Термины PMSM и BLDC часто сопоставляют, чтобы различать двигатели PMSM с синусоидальным индуктивным напряжением (противо-ЭДС) и двигатели BLDC с трапециевидным индуктивным напряжением (см. ниже). Сегодня большинство двигателей BLDC демонстрируют синусоидальную противоЭДС.
1. Структура/типы
Большинство двигателей BLDC представляют собой «двигатели с внутренним ротором», в которых ротор вращается с помощью постоянных магнитов на валу в стационарном статоре с катушками. В «двигателях с внешним ротором» статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
Преимущества двигателей с внутренним ротором заключаются в низкой инерции ротора и лучшем рассеивании тепла. Напротив, в двигателях с внешним ротором теплогенерирующие катушки изолированы от окружающей среды корпусом ротора и магнитами. Из-за высокого момента инерции ротора и того факта, что корпус ротора с трудом поддается балансировке, двигатели с внешним ротором не подходят для очень высоких скоростей вращения.
Соответственно, двигатели с внутренним ротором используются в большинстве промышленных применений. Двигатели с внешним ротором демонстрируют свои преимущества при серийном применении, поскольку их производство дешевле. Их также можно сделать короче и обычно они имеют меньший момент фиксации, а также больший крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Оба двигателя обычно имеют три фазы. Однако существуют также конструкции с одной или двумя фазами. Далее будут описаны только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Двигатели с внутренним и внешним ротором изготавливаются с щелевыми обмотками; здесь провод обмотки наматывается на башмаки полюсов статора (железный сердечник), что позволяет линиям магнитного поля обмотки вытекать и концентрироваться в определенной форме. Статор состоит из тонких, смещенных друг к другу изолированных металлических пластин для сведения к минимуму потерь на вихревые токи.
Двигатели BLDC без пазов представляют собой особый тип двигателя с внутренним ротором, который очень популярен в очень маленьких двигателях. Их статоры состоят только из кольцеобразных металлических пластин, а внутри закреплена плоская, склеенная или герметизированная обмотка. Поскольку нет железного сердечника, индуктивность двигателя очень мала и ток в обмотках быстро возрастает. Кроме того, потери в железе значительно снижены, а двигатели имеют более высокий КПД. При медленной работе положительно сказывается отсутствие пульсаций крутящего момента. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных башмаках и отсутствует фиксирующий крутящий момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, так как их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается незаполненной между обмотками. С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
2. Управление/коммутация двигателя
Двигатель постоянного тока вращается, потому что постоянный магнит на роторе пытается выровняться в направлении магнитного поля, создаваемого электромагнитами статора. При этом крутящий момент максимален, когда оба магнитных поля перпендикулярны друг другу. Тип управления различают двояко: по форме питания обмоток (блочное или синусоидальное) или по способам определения положения ротора. Необходимо определить положение ротора, так как токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, т.е. он продолжал вращаться с заданной скоростью.
2.1 Коммутация блока
Положение ротора можно легко определить с помощью датчиков Холла в двигателе. Затем они могут переключаться соответствующим образом совмещенным магнитом на роторе в точное время, когда обмотка должна быть переключена. Тогда три обмотки соответствуют трем датчикам Холла; их состояния определяют, как должны быть соединены обмотки. Если три обмотки переключаются цифровым способом, т. е. на обмотках нет тока или полный ток, это называется блочной коммутацией. Эта комбинация датчиков Холла и блочной коммутации является технически самым простым методом приведения в действие бесконтактного двигателя постоянного тока. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора. Это связано с тем, что выравнивание магнитного поля статора остается постоянным через 60°, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине находится перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30° в точках переключения.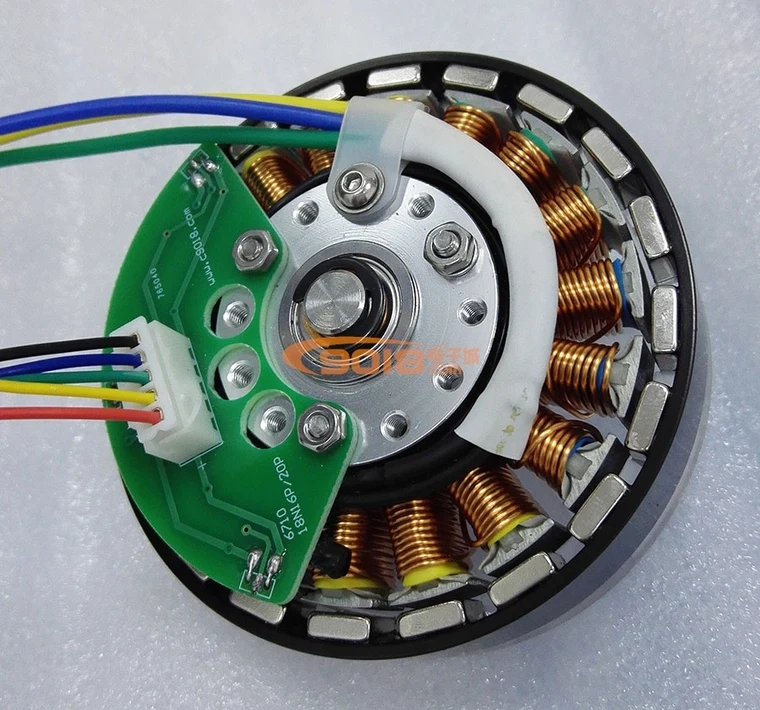 В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
2.2 Синусоидальная коммутация
Оптимальной формой питания является синусоидальная коммутация, при которой каждая обмотка двигателя питается синусоидальной волной, сдвинутой на 120°, что приводит к постоянно вращающемуся магнитному полю статора с постоянной напряженностью. Как правило, если для определения положения ротора доступны только датчики Холла, можно также использовать синусоидальную коммутацию путем интерполяции между точками переключения.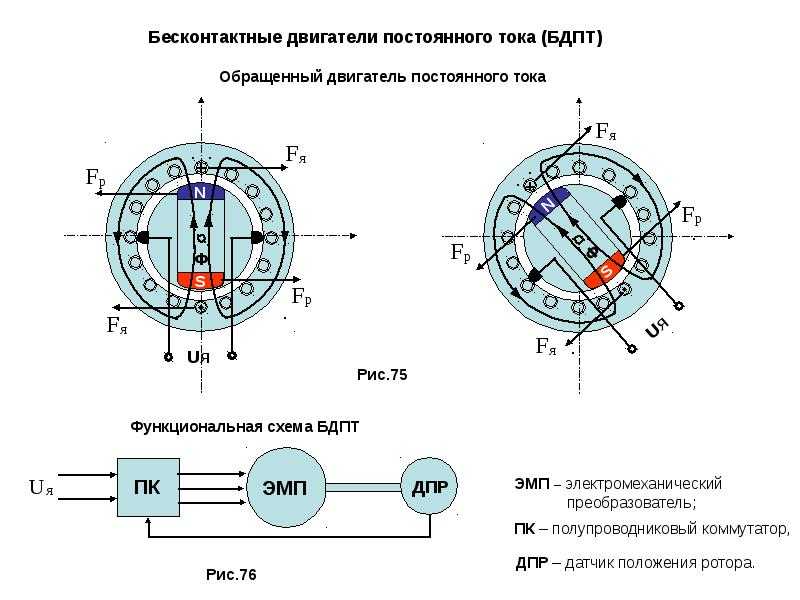 В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
Таким образом, для синусоидальной коммутации в идеале требуется система с более высоким разрешением для определения положения ротора. Обычно он состоит из оптического или магнитного энкодера, который постоянно определяет положение ротора с достаточной точностью и соответствующим образом регулирует ток.
2.3 Поле-ориентированное управление
Иногда поле-ориентированное управление все еще отличается от синусоидальной коммутации; однако часто оба термина используются взаимозаменяемо. Эти термины используются взаимозаменяемо, поскольку синусоидальная коммутация, как описано выше, оптимально управляет магнитным полем статора.
Если не учитывать, как работает сам регулятор тока, разница в описании синусоидальной коммутации не очевидна. Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях могут возникать фазовые сдвиги и искажения токовых потоков, так что магнитное поле статора больше не перпендикулярно ротору.
Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях могут возникать фазовые сдвиги и искажения токовых потоков, так что магнитное поле статора больше не перпендикулярно ротору.
Управление по полю решает эту проблему, управляя вектором тока непосредственно во вращающейся системе координат ротора. Для этого измеренные токи трех фаз преобразуются посредством преобразования Кларка-Парка в двухосную систему координат ротора. Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
2.4 Бездатчиковое управление
Бездатчиковое управление – это не дополнительный метод управления, а скорее термин для методов, позволяющих определять положение ротора без датчиков (например, датчиков Холла, энкодеров). Эти методы можно условно разделить на два класса:
Простое бездатчиковое управление основано на прямом измерении противо-ЭДС в соответствующей обмотке, не находящейся под напряжением. Однако по сравнению со стандартным контролем этот метод требует специального оборудования и нестабилен ниже прибл.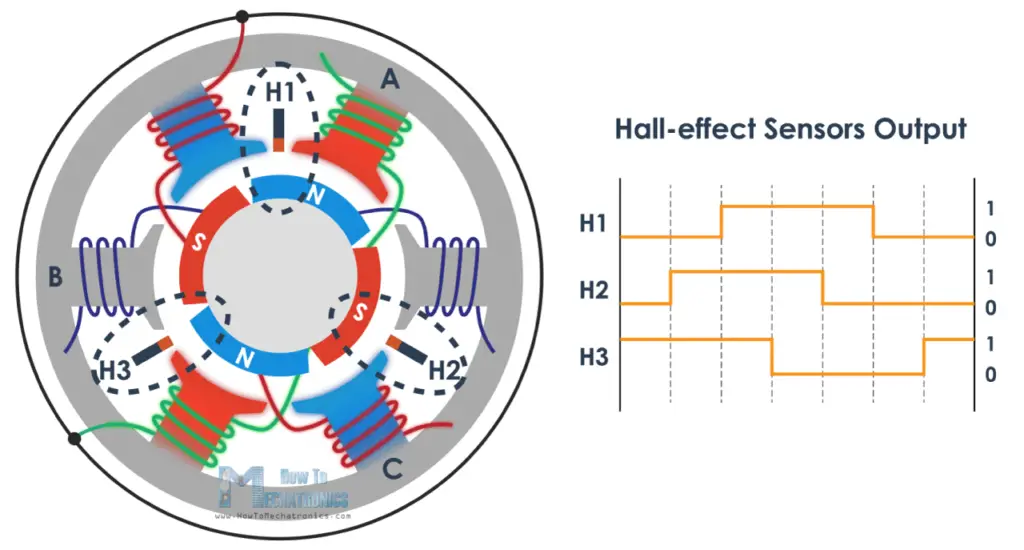 20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
Более сложные решения основаны на так называемом «отслеживании наблюдателя», которое воспроизводит значения, не поддающиеся непосредственному измерению, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является чрезвычайно точная модель двигателя, которая параллельно с реальным двигателем вычисляет из известных входных значений, таких как установленный ШИМ, те значения, которые также измеряются, такие как текущий уровень в обмотка. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за ошибки наблюдения, определяемой этим методом, внутренние значения модели двигателя постоянно корректируются. С помощью этого метода также получают более точную оценку значений, которые фактически не измеряются, например скорости. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за наведенного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. Результатом является «виртуальный энкодер», который предоставляет информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и настоящий оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Общим для обоих бессенсорных методов является то, что информация о положении ротора недоступна на холостом ходу, поэтому требуется специальный метод запуска. Подобно шаговому двигателю, двигатель работает в управляемом режиме в течение нескольких коммутационных циклов, пока не наберет требуемую скорость и бездатчиковое измерение не позволит определить положение ротора.
3. Важные параметры
| Скорость холостого хода | Макс. скорость вращения ненагруженного двигателя, определяемая в первую очередь константой напряжения скорость вращения ненагруженного двигателя, определяемая в первую очередь константой напряжения |
|---|---|
| Ток холостого хода | Ток на холостом ходу (потребление, необходимое для преодоления трения) |
| Номинальная скорость/номинальный крутящий момент | Номинальная рабочая точка |
| Максимальный крутящий момент | Моментально достижимый крутящий момент, обычно в 3 раза больше номинального крутящего момента в течение прибл. 5 с, затем тепловой захват => I2T 5 с, затем тепловой захват => I2T |
| Постоянный крутящий момент (Нм/А) | Указывает соотношение между крутящим моментом и током |
| Постоянное напряжение (В/об/мин) | Наведенная противо-ЭДС на оборот |
Бесколлекторные двигатели постоянного тока мощностью менее 900 Вт
- Специальные оборонные двигатели
- Бесщеточные двигатели постоянного тока — мощность менее 900 Вт
- Серводвигатели — мощность ниже 70 кВт
- Щеточные двигатели
- Двигатели со встроенной электроникой привода
- Суровая и опасная среда
- Устаревшие продукты
Moog предлагает широкий выбор высокопроизводительных бесщеточных двигателей и серводвигателей, используемых в самых разных областях, включая медицину, автоматизацию офиса, упаковку, промышленность, авиакосмическую промышленность и оборону.
- Бесщеточные двигатели постоянного тока с внутренним ротором — серия глушителей®
- Бесколлекторные бескаркасные моментные двигатели постоянного тока с прямым приводом
- Двигатели ограниченного вращения
- Бесщеточные двигатели постоянного тока с тороидальной обмоткой
Встроенные двигатели
Компания Moog расширила свои решения для перемещения, добавив линейку встроенных двигателей с широкими возможностями программирования.
Moog Animatics предлагает передовые технологии, объединяющие двигатель, энкодер, усилитель, контроллер, средства связи RS232/RS485 и устройства ввода-вывода. Теперь SmartMotor оснащен опциональной технологией Combitronic.
Узнать больше
Сервоуправление встроено в высокоэффективный бесщеточный двигатель. Обеспечивает большую свободу проектирования машин и значительно сокращает пространство для проводки и шкафа.
Узнать больше
Заказные двигатели
Компания Moog расширила свою линейку высокопроизводительных бесщеточных двигателей, включая бесщеточные двигатели с постоянными магнитами, интенсивные элементы управления DSP и дополнительные компоненты. Эти индивидуальные решения обеспечивают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Moog Aspen решает проблемы управления движением OEM, используя свои инженерные возможности для разработки и производства инновационных продуктов, включая бесщеточные двигатели с постоянными магнитами, интенсивные элементы управления DSP и компоненты с добавленной стоимостью. Эти индивидуальные решения обеспечивают конкурентное преимущество как по характеристикам, так и по стоимости для широкого спектра приложений и рынков.
Узнать больше
Moog Aspen тесно сотрудничает с нашими крупными OEM-клиентами, чтобы предложить «больше, чем просто двигатель».
