Как работают вентильные электродвигатели. Какие у них преимущества перед асинхронными двигателями. Где применяются вентильные двигатели в промышленности и технике. Каковы особенности конструкции вентильных электродвигателей.
Конструкция и принцип работы вентильного электродвигателя
Вентильный электродвигатель (ВЭД) представляет собой синхронную машину с возбуждением от постоянных магнитов, расположенных на роторе. Основные конструктивные элементы ВЭД:
- Статор с трехфазной обмоткой
- Ротор с постоянными магнитами
- Датчик положения ротора
- Электронный блок управления (контроллер)
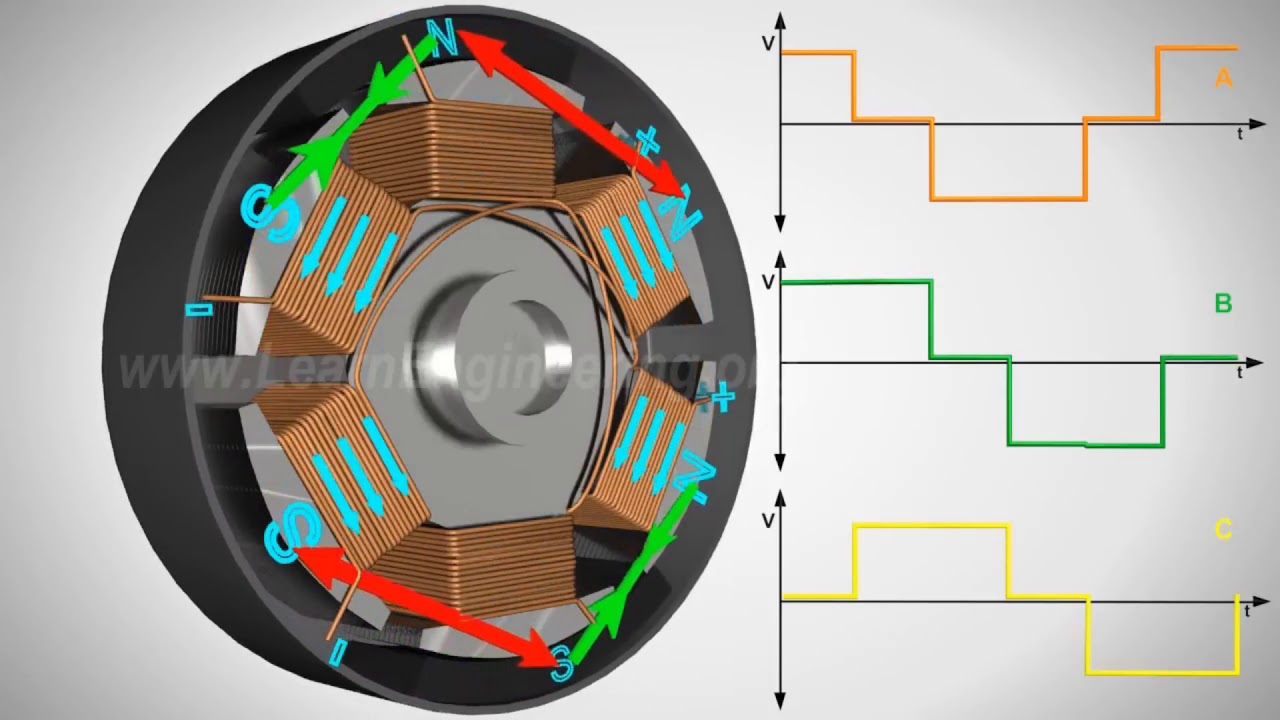
Принцип работы ВЭД основан на взаимодействии магнитного поля постоянных магнитов ротора с управляемым магнитным полем статора. Контроллер по сигналам датчика положения ротора коммутирует обмотки статора таким образом, чтобы угол между векторами магнитных полей статора и ротора всегда составлял около 90°. Это обеспечивает максимальный вращающий момент.
Преимущества вентильных электродвигателей
По сравнению с асинхронными двигателями вентильные ЭД обладают рядом важных преимуществ:
- Более высокий КПД (до 95% и выше)
- Меньшее энергопотребление (на 15-30%)
- Широкий диапазон регулирования скорости вращения
- Высокая точность позиционирования
- Большой пусковой момент
- Компактные размеры при той же мощности
- Низкий уровень шума и вибраций
Эти преимущества обусловлены отсутствием потерь на возбуждение в роторе и возможностью эффективного управления с помощью электроники.
Области применения вентильных электродвигателей
Благодаря своим характеристикам ВЭД нашли широкое применение в различных отраслях:
- Станкостроение (приводы подач станков с ЧПУ)
- Робототехника и автоматизация
- Нефтедобывающая промышленность (погружные насосы)
- Бытовая техника (стиральные машины, холодильники)
- Электротранспорт (электромобили, электровелосипеды)
- Медицинское оборудование
- Аэрокосмическая техника
Особенно эффективно применение ВЭД в системах с частыми пусками, реверсами, торможениями.

Особенности управления вентильными двигателями
Для работы вентильного двигателя требуется специализированная система управления, включающая:
- Силовой преобразователь (инвертор)
- Микроконтроллер
- Датчики тока и напряжения
- Датчик положения ротора
Контроллер на основе сигналов датчиков формирует управляющие импульсы для силовых ключей инвертора. Это позволяет реализовать различные алгоритмы управления — скалярное, векторное, прямое управление моментом. Применение цифровых систем управления обеспечивает высокую точность и быстродействие привода.
Конструктивные особенности вентильных электродвигателей
Основные отличия конструкции ВЭД от асинхронных двигателей:
- Ротор с постоянными магнитами вместо короткозамкнутой обмотки
- Наличие датчика положения ротора (энкодера, резольвера и др.)
- Специальная конструкция статорной обмотки
- Усиленные подшипниковые узлы
- Корпус с улучшенным теплоотводом
Применение редкоземельных магнитов позволяет создавать компактные и мощные двигатели. Особое внимание уделяется креплению магнитов, чтобы исключить их отрыв при высоких скоростях вращения.
Типы вентильных электродвигателей
Существует несколько основных разновидностей ВЭД:
- По расположению магнитов:
- С поверхностными магнитами
- Со встроенными магнитами
- По форме обратной ЭДС:
- Синусоидальные (PMSM)
- Трапецеидальные (BLDC)
- По конструкции статора:
- Цилиндрические
- Дисковые
- Линейные
Выбор типа двигателя зависит от конкретного применения и требуемых характеристик.
Сравнение вентильных и асинхронных двигателей
Основные различия между вентильными и асинхронными электродвигателями:
| Параметр | Вентильный двигатель | Асинхронный двигатель |
|---|---|---|
| КПД | 90-97% | 75-90% |
| Диапазон регулирования скорости | 1:10000 и более | 1:100 |
| Перегрузочная способность | До 5 крат | 2-3 крата |
| Массогабаритные показатели | Меньше на 20-40% | Базовые |
| Стоимость | Выше | Ниже |
Несмотря на более высокую начальную стоимость, применение ВЭД часто оказывается экономически оправданным за счет экономии электроэнергии и повышения производительности оборудования.
Перспективы развития вентильных электродвигателей
Основные направления совершенствования ВЭД:
- Улучшение характеристик постоянных магнитов
- Оптимизация конструкции для снижения себестоимости
- Разработка более эффективных алгоритмов управления
- Создание специализированных двигателей для новых применений
- Интеграция с силовой электроникой и датчиками
Развитие технологий производства магнитов и электроники будет способствовать дальнейшему расширению области применения вентильных электродвигателей.
конструктивные особенности и принцип действия, преимущества и недостатки, количество фаз
Работа прецизионных систем требует серьёзного контроля. Для выполнения контролирующих функций в таких системах принято использовать вентильный двигатель (ВД), позволяющий повысить вычислительные возможности микроэлектронного оборудования. Он же улучшает свойства электродвигателей постоянного тока, обеспечивая высокую плотность длительного момента.
Конструктивные особенности
Этот тип электромотора имеет стандартную конструкцию. Она состоит из ротора, роль которого выполняет магнитный диск, статоров и подшипников. Все детали заключены в прочный корпус. Статор ВД аналогичен тому, что используется в асинхронных приборах. Основным его элементом выступает стальной сердечник, по периметру которого располагается обмотка из меди. От количества обмоток зависит, к какому типу будет относиться вентильный электродвигатель (однофазному, двухфазному, трёхфазному).
В зависимости от того, как витки обмотки располагаются в статоре, форма его электродвижущей силы может быть:
- Трапецеидальной (BLDC).

- Синусоидальной (PMSM).
Форма обмотки оказывает прямое влияние на способ питания двигателей. Изменение электрического тока также может происходить синусоидально либо трапецеидально.
Ротор представляет собой несколько магнитов с постоянным полем. Ранее для его производства применялись магниты из феррита. Но уровень их магнитной индукции достаточно мал, поэтому они были заменены на изделия из сплавов редкоземельных элементов, позволяющих достичь необходимого уровня индукции и одновременно сделать ротор более компактным.
Неотъемлемой частью любого вентильного двигателя является датчик положения ротора. В основе его работы может быть заложен:
- фотоэлектрический принцип;
- индуктивный принцип;
- эффект Холла и другие явления.
Фотоэлектрический датчик положения состоит из трёх стационарных фотоприемников, которые поочерёдно закрываются вращающейся шторкой.
Датчик положения фотоэлектрического типа относится к категории самых распространённых, поскольку является практически безынерционным. Также он позволяет исключить запаздывание в канале обратной связи.
Принцип действия
В зависимости от особенностей конструкции и технических характеристик выделяют асинхронный, синхронный и индуктивный вентильный двигатель. Принцип работы каждого из них основывается на индуцировании непостоянных магнитных полюсов на роторе. При подаче напряжения начинается его вращение в соответствии с полюсами статора, вследствие чего сопротивление магнитного поля сводится к минимуму.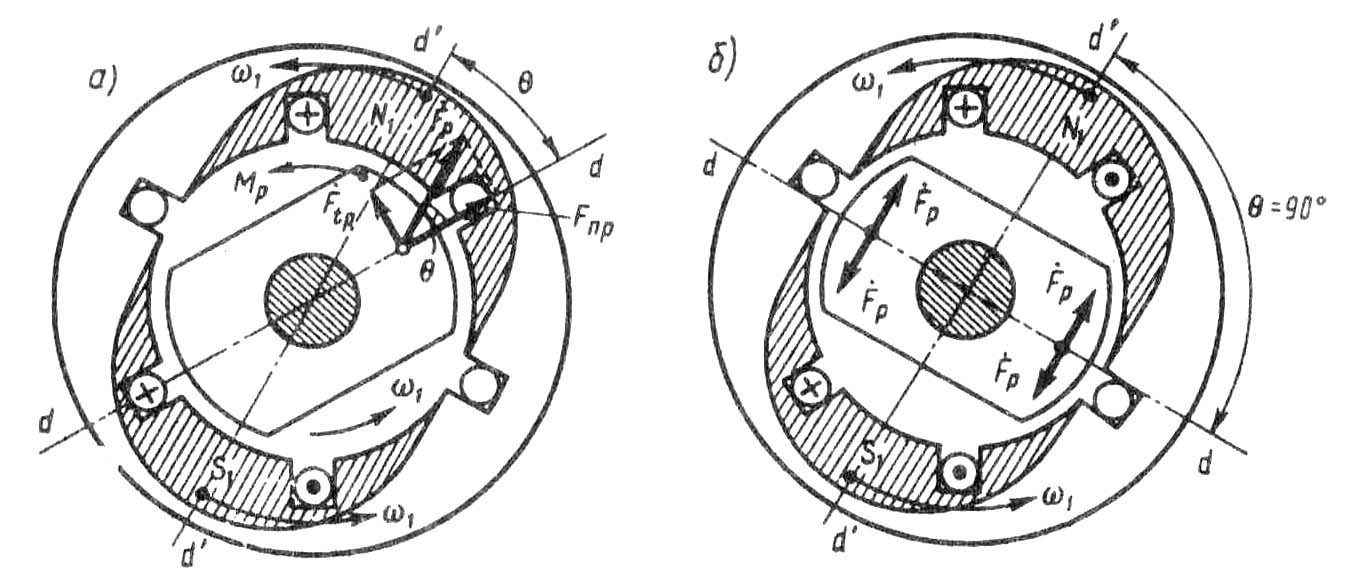
Сведения о состоянии ротора используются в качестве инструмента управления фазой подачи напряжения. Наложение сигналов на угловую ненасыщенную фазу индуктивности осуществляется таким образом, что её максимальное значение совпадает с минимальным сопротивлением полюса.
Чтобы высокие вольт-секунды не оказывали негативного действия на работающую электронику, следует предусмотреть ограничение фазного тока на невысоких скоростях двигателя. Роль ограничителей в этом случае выполняют датчики. При высоких скоростях необходимость в ограничении тока отпадает.
Выровненный угол управляющего напряжения одиночного импульса позволяет оптимизировать производительность оборудования. Процесс её преобразования наглядно демонстрируется в виде траектории реактивной энергии. Преобразованное в механическую энергию питание отвечает за мощностную область. Отключение электроэнергии приводит к тому, что избыточная либо остаточная энергия переходит к статору.
Преимущества и недостатки
Электродвигатели такого типа нашли широкое применение в производственной и промышленной сфере. Это обуславливается следующими достоинствами ВД:
- широким интервалом для модифицирования частоты вращения;
- максимально точным позиционированием;
- быстродействием и высокой динамикой;
- экономически выгодным техобслуживанием;
- достаточной защищенностью от взрывов;
- устойчивостью к большим нагрузкам при вращении;
- мягким переключением скоростей;
- хорошим КПД, превышающим 90%;
- большим рабочим ресурсом и сроком службы.
При длительной работе вентильного двигателя не происходит опасного перегрева основных элементов, что делает процесс его эксплуатации более эффективным и безопасным.
Эта разновидность электродвигателя обладает определёнными недостатками. Они выражаются в сложной системе управления и высоком уровне шума в процессе работы. Также к очевидным минусам следует отнести высокую цену, обусловленную применением дорогостоящих постоянных магнитов, используемых при изготовлении ротора.
Количество фаз
Вентильный электродвигатель, как и другие виды устройств, может функционировать от постоянного и переменного тока. Встречаются двигатели, рассчитанные на разное число фаз.
Однофазный относится к категории самых простых, имеющих минимальное количество связей с электроникой. Характеризуется наличием пульсаций, высоким крутящим моментом. Однофазный прибор не может запускаться на всех угловых позициях, используется в установках, где важна высокая скорость.
Двухфазный мотор активирует воздушный зазор, а при дополнительном настраивании в полюсах ротора создаётся асимметрия. Имеет высокий крутящий момент, который может спровоцировать негативные последствия во время эксплуатации.
Имеет высокий крутящий момент, который может спровоцировать негативные последствия во время эксплуатации.
Трехфазное устройство показывает эффективность при запуске и создании крутящего момента без задействования большого числа фаз. При наличии чётного количества полюсов оптимально подходит для техники, в которой важную роль играет высокая мощность при небольшой скорости работы (к примеру, для насосов). В процессе работы создаётся высокий крутящий момент и большой уровень шума.
Четырехфазный двигатель лишён недостатков из-за завышенного крутящего момента и наличия пульсаций. Однако характерная для него высокая мощность и стоимость не позволяет широко использовать такой мотор в различном оборудовании.
Вентильный электродвигатель — это… Что такое Вентильный электродвигатель?
Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчиком положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из редкоземельных сплавов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
В двигателях большой мощности вместо постоянного магнита на роторе используется электромагнит. Напряжение питания к нему подаётся через щётки и контактные кольца установленные на роторе. Так устроен автомобильный генератор.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
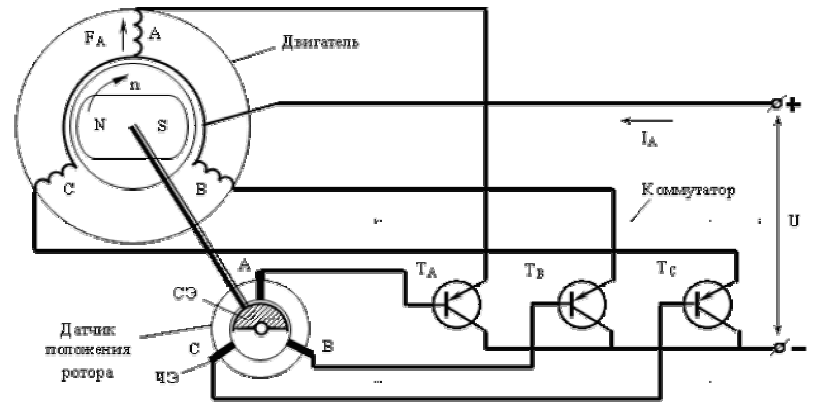
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микропроцессора требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД, основан на том что контроллер ВД так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки ВД и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора ВД.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент действующий на ротор меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.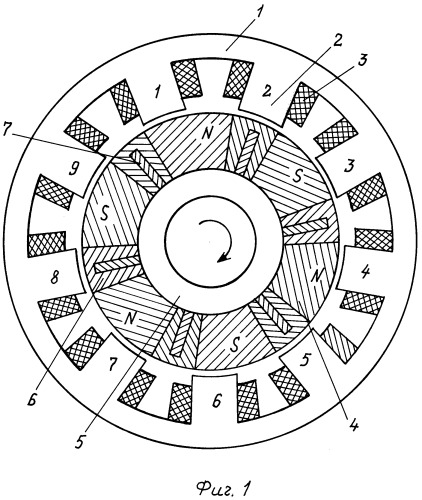
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Высокое быстродействие и динамика, точность позиционирования
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 % и соsφ более 0,95)
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
- Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
См.
 также
также
Ссылки
Wikimedia Foundation. 2010.
Погружной вентильный двигатель (ВЭД) — Добыча нефти и газа
Конструктивно, вентильный Разрез ротора ВЭД двигатель не отличается от асинхронного двигателя за исключением устройства ротора. Отличие конструкции пакетов ротора состоит в том, что они собраны на втулках, выполненных из бесшовных труб, на которых склеиваются и опрессовываются пластины из электротехнической стали. В пазы пакетов вставляются постоянные магниты. При этом количество полюсов составляет от двух до пяти пар с чередованием северного и южного полюсов.
Еще одной конструктивной особенностью вентильного двигателя является наличие датчика положения ротора (ДПР), который необходим для управления подключения тех фаз электродвигателя, которые создают максимальный момент с полюсами ротора.
Принцип работы вентильного двигателя основан на том, что микроконтроллер, расположенный в станции управления, питает обмотки статора по определенному алгоритму так, чтобы магнитное поле статора всегда было сдвинуто относительно магнитного поля ротора. В результате взаимодействия магнитных полей создается вращающий момент, который стремится развернуть ротор так, чтобы магнитные поля статора и ротора совпали. Но при повороте ротора под действием ДПР происходит переключение обмоток, и магнитное поле статора поворачивается на следующий шаг. Таким образом, чем быстрее происходит переключение обмоток статора, тем быстрее вращается ротор.
В результате взаимодействия магнитных полей создается вращающий момент, который стремится развернуть ротор так, чтобы магнитные поля статора и ротора совпали. Но при повороте ротора под действием ДПР происходит переключение обмоток, и магнитное поле статора поворачивается на следующий шаг. Таким образом, чем быстрее происходит переключение обмоток статора, тем быстрее вращается ротор.
Преимущества вентильных электродвигателей перед асинхронными двигателями заключаются в следующем. При одинаковой мощности вентильные двигатели обладают меньшими массогабаритными показателями, пониженным тепловыделением и энергопотреблением (последнее снижается до 30%), а также повышенным значением КПД, коэффициента мощности, электромагнитного момента. Имеется возможность регулирования частоты вращения (250-2000, 500-3500 об/мин) и автоматического сохранения мощности на валу при различных режимах работы насоса. Благодаря регулируемому приводу осуществляется плавный запуск установки, компенсация неточностей подбора оборудования, а также оптимизация работы системы «насос-пласт» в случае изменений параметров пласта.
К недостаткам вентильных двигателей следует отнести высокую стоимость станции управления и самого электродвигателя, обусловленную сложной системой управления и использованием дорогостоящих постоянных магнитов в конструкции ротора.
Похожие статьи:
РЭНГМ → Центробежный насос (ЭЦН)
РЭНГМ → Погружной насос для скважины
Статьи и новости нефтяной промышленности → Роль нефти и газа в жизни человека.
РЭНГМ → Погружной электродвигатель (ПЭД)
Компания «ВИК» Вентильные двигатели ДВУ для приводов подач станков с ЧПУ
Вентильные двигатели ДВУ/ДВУ2М с возбуждением от редкоземельных магнитов
Серия вентильных двигателей ДВУ (ДВУ2М) предназначена для работы в приводах подач станков с ЧПУ, в приводах промышленных роботов и в автоматических системах.
Возбуждение двигателей ДВУ осуществляется от редкоземельных магнитов, расположенных в роторе; в статоре уложена трехфазная обмотка, которая питается от транзисторного преобразователя.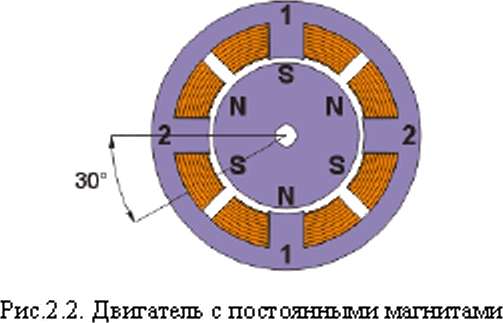
Двигатели типа ДВУ 55, 85 и 115 снабжены комплектом ПДФ-8, двигатели типов ДВУ 165, 215 и 265 — комплектом ПДФ-9.
В состав каждого из них входят датчик положения ротора двигателя, импульсный датчик пути и бесконтактный тахогенератор. В двигатели могут быть встроены магнитоэлектрические тормоза.
Двигатели ДВУ выполнены со способом охлаждения IC0041 согласно ГОСТ 20459-75. Нагревостойкость изоляции обмоток соответствует классу F. В режиме S1 по ГОСТ 183-74 двигатели 2ДВУ обеспечивают продолжительную работу в диапазоне частот вращения двигателя: от 0 до 0,25птах — с вращающим моментом, равным Мдо, и от 0,25птахдо птах — с вращающим моментом, равным 0,8Мдо.
В двигателях со встроенным удерживающим тормозом номинальный (фиксирующий) момент тормозов должен быть не менее Л/до. В стопорном режиме двигатель допускает перегрузку с моментом 4Л/до, в течение 0,5 с.
Технические данные вентильных электродвигателей
|
Типоразмер двигателя |
Md0, Н.м |
N макс, 1/мин |
U=520 В |
|
|
Id0,A |
E,В |
|||
|
ДВУ2М165К |
4 |
2000 |
2,5 |
220 |
|
ДВУ2М165S |
7 |
1000 |
2,7 |
228 |
|
2000 |
4,5 |
|||
|
ДВУ2М165M |
10 |
1000 |
2,7 |
295 |
|
2000 |
5,4 |
|||
|
ДВУ2М165L |
13 |
1000 |
3,5 |
295 |
|
2000 |
7,0 |
|||
|
ДВУ2М215S |
17 |
1000 |
4,8 |
266 |
|
2000 |
9,6 |
|||
|
ДВУ2М215M |
23 |
1000 |
6,7 |
266 |
|
2000 |
13,4 |
|||
|
ДВУ2М215L |
35 |
1000 |
10,9 |
271 |
|
2000 |
21,7 |
|||
подробнее>>
Принцип работы вентильных электродвигателей
Фазы статорной обмотки подключены к источнику постоянного тока через силовые ключи коммутатора, управляемые по сигналам датчика положения ротора.
В вентильных двигателях с постоянными магнитами наибольшее распространение получила трехфазная обмотка, соединенная звездой. Чувствительные элементы 1—6 датчика положения ротора (ДПР) при его вращении осуществляют включение транзисторных ключей коммутатора, последовательно включенные ключи 1 и 4, 2 и 5, 3 и 6, образующие так называемые стойки, работают в противофазе. В целях исключения сквозных токов через стойку сигнальный сектор ДПР принимают равным 120°. Таким образом, в любой момент времени работают две фазы, а ток в фазах обмотки реверсируется в те моменты, когда ротор поворачивается на 180° относительно предыдущего положения той же фазы и при положения ротора заданной последовательности работы ключей обеспечивается однонаправленный вращающий момент двигателя.
Изменение направления вращения обеспечивается путем переключения входных цепей силовых ключей каждой стойки. Другой путь реверсирования двигателя заключается в переключении начала и конца каждой фазы.
Для подбора вентильных двигателей просим Вас направлять запросы нашим техническим специалистам по электронной почте [email protected].
Вентильные электродвигатели
Погружные вентильные электродвигатели «Новомет»Вентильные электродвигатели — это изделия с лучшими энергетическими характеристиками по сравнению с асинхронными. ГК «Новомет» является одним из лидеров отрасли по производству надежных и эффективных погружных вентильных электродвигателей (ПВЭД). Применение вентильного электродвигателя сокращает количество энергии, потребляемой УЭЦН до 15%. А при сочетании вентильных электродвигателей и энергоэффективных насосов, затраты на электроэнергию при эксплуатации УЭЦН снижаются в среднем на 25-30%.
Для производства энергии требуется энергия!
На сегодня наиболее распространенным способом добычи жидкости из скважины является механизированная добыча с применением установок электроцентробежного насоса (УЭЦН). В наше время многие нефтяные и нефтесервисные компании вкладывют миллионы долларов в технологии разведки, бурения и заканчивания скважин, однако не уделяют того же внимания поиску более эффективных способов добычи углеводородов. За последнее десятилетие основной целью ГК «Новомет» является поиск и совершенствование эффективных способов снижения затрат на механизированную добычу.
область применения
- УЭЦН в скважинах типовой конструкции
- Энергоэффективные УЭЦН
- УЭЦН малых габаритов для боковых стволов, технология ColibriESP
- Установки винтовых насосов с нижним приводом
- Установки объемно-роторных насосов
- УЭЦН для подъема геотермальных вод
возможности
Сокращение затрат на электроэнергию при подъеме жидкости из скважины.Применение при различных осложняющих факторах, где применение асинхронного ПЭД затруднительно:
- на скважинах с вязкой нефтью
- с нестабильной подачей (работа в цикличном режиме)
- на малодебитных скважинах
- со сложными условиями эксплуатации (после гидроразрывов и других способов увеличения добычи нефти)
- на скважинах с высокой температурой жидкости (трудноизвлекаемые запасы, геотермальные воды)
особенности
- Широкая линейка типоразмеров, в том числе двигатели сверхмалых габаритов — 55 и 81 мм для использования с установками ColibriESP и SlimlineESP
- Пониженное удельное тепловыделение на единицу мощности
В серийных асинхронных электродвигателях используется преобразование переменного тока, поданного на обмотки статора, во вращающееся электромагнитное поле. Так как обмотка ротора имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора и создаёт вращательный момент, приводящий в движение ротор. Таким образом, вместо того, чтобы использовать всю потребляемую электроэнергию для создания вращения ротора, около 13% ее тратится на создание и поддержание электромагнитного поля, и в конечном итоге теряется на нагрев.
Прорыв в технологии электроприводов УЭЦН
В отличие от асинхронных двигателей, в вентильных ПЭД для создания вращательного момента вместо обмотки в роторе используются редкоземельные постоянные магниты, а также специальная схема подачи питающего напряжения на обмотку статора. Как результат — повышение КПД и и снижение энергопотребления двигателя примерно на 15%.
Управление работой двигателя осуществляется с помощью электронных ключей (так называемых вентилей), переключение которых выполняется станцией управления по специальной программе. Кроме того, станция управления формирует регулируемую частоту питания двигателя, от которой напрямую зависит его частота вращения и полезная мощность на валу.
Основные элементы вентильного электродвигателя — статор с трехфазной обмоткой, ротор с постоянными магнитами, головка и основание. Магнитопровод статора состоит из листов электротехнической стали с термостойким покрытием, которые запрессованы в трубчатый корпус. Обмотка статора однослойная, протяжная, катушечная, выполнена теплостойким обмоточным проводом по схеме «звезда» с выводом общей точки для системы контроля параметров установки. Ротор с постоянными магнитами установлен в расточке статора на подшипниках скольжения.
Низкооборотные (100-1500 об/мин) двигатели для привода винтовых и объемно-роторных насосов|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
117 мм |
100-1500 об/мин |
до 40 кВт при 500 об/мин |
|
4,60 дюйма |
Вентильные двигатели на 3600 об/мин для энергоэффективных и серийных насосных систем
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
103 мм |
1000-4200 об/мин |
6-200 кВт (@100 Гц) |
|
4,06 дюйма |
||
|
117 мм |
1000-4200 об/мин |
12-310 кВт (@100 Гц) |
|
4,60 дюйма |
||
|
130 мм |
1000-4200 об/мин |
32-300 кВт (@100 Гц) |
|
5,12 дюйма |
||
|
185 мм |
1000-4200 об/мин |
60-800 кВт (@100 Гц) |
|
7,44 дюйма |
Вентильные двигатели на 6000 об/мин для энергоэффективных насосных систем
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
55 мм |
8500 об/мин |
до 35 кВт (@283 Гц) |
|
2,17 дюйма |
||
|
81 мм |
1000-6000 об/мин |
4-90 кВт (@200 Гц) |
|
3,19 дюйма |
||
|
103 мм |
1000-6000 об/мин |
12-280 кВт (@200 Гц) |
|
4,06 дюйма |
||
|
117 мм |
1000-6000 об/мин |
12-280 кВт (@200 Гц) |
|
4,60 дюйма |
||
|
130 мм |
1000-6000 об/мин |
60-644 кВт (@200 Гц) |
|
5,12 дюйма |
Секционные двигатели на 6000 об/мин
|
Наружный диаметр двигателя |
Скорость вращения |
Номинальная мощность одной секции |
|
55 мм |
8500 об/мин |
до 70 кВт (@283 Гц) |
|
2,17 дюйма |
||
|
81 мм |
1000-6000 об/мин |
100-200 кВт (@200 Гц) |
|
3,19 дюйма |
||
|
130 мм |
4500 об/мин |
до 770 кВт (@150 Гц) |
|
5,12 дюйма |
Все вентильные двигатели «Новомет» в сочетании с универсальными станциями управления с ЧРП обеспечивают широкий диапазон скоростей вращения, при сохранении низкого уровня энергопотребления во всем диапазоне. В результате, мы можем предложить нашим заказчикам линейку высокооборотных электродвигателей (от 3000 до 6000 об/мин), а также низкооборотные двигатели (от 100 до 1500 об/мин) для использования совместно с насосами объемного типа в скважинах с вязкими жидкостями или с малой подачей.
Преимущества вентильных двигателей
По сравнению с асинхронными вентильные двигатели:
- Сокращают потребление энергии до 15%, а в паре с энергоэффективным насосами — до 30%.
- Улучшают производительность ЭЦН в широком диапазоне подач и напоров.
- Поддерживают стабильную работу ЭЦН, сохраняя постоянный крутящий момент на валу независимо от скорости вращения.
- Обеспечивает большую наработку за счет снижения нагрева оборудования.
- Предоставляют до 2-х раз большую мощность в одной секции.
- Имеют высокую мощность в секции, поэтому нет необходимости в применении секционных двигателей
Типоразмеры и особенности применения
Вентильные двигатели предназначены для работы в составе энергоэффективных установок PowerSaveESP, а также установок малого диаметра — SlimLineESP — установок, имеющих меньший внешний диаметр по сравнению с аналогами. Они идеально подходят для работы в горизонтальных скважинах и скважинами с высокой степенью искривления ствола. В общем случае, область применения вентильных электродвигателей включает:
- Установки ЭЦН как для стандартных скважин, так и скважин с осложнениями.
- Установки ЭЦН в широком диапазоне подач и напоров.
- Установки винтовых насосов с нижним приводом, установки объемно-роторных насосов
- Установки ЭЦН для подъема геотермальных вод
Наши вентильные электродвигатели доступны в габаритах от 55 мм до 188 мм. Мы предлагаем самые компактные модели вентильных двигателей на рынке, которые идеально подходят для малогабаритных УЭЦН и для мобильного комплекса Colibri ESP — установки, монтируемой на грузонесущем кабеле внутри НКТ.
Бесколлекторные двигатели | Поставки бесколлекторных двигателей по России
Главная / Каталог / Бесколлекторные двигатели
Бесколлекторный электродвигатель (вентильный электродвигатель) — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Бесколлекторный двигатель объединяет в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Устройство, принцип работы бесколлекторного двигателя
Бесколлекторные двигатели (BLDC — brushless DC motors) или, как их еще называют, вентильные двигатели или шпиндельные двигатели, обладают высокой динамикой и точностью позиционирования, большой перегрузочной способностью двигателя к моменту, а также высоким КПД двигателя – более 90%. Благодаря отсутствию трущихся частей в бесколлекторном двигателе возможно его применения во взрывоопасной и агрессивной среде.
Бесколлекторные двигатели состоят из статора традиционной обмотки, в зависимости от способа укладки витков он бывает BLDC – для двигателей имеющих обратную электродвижущую силу и PMSM – для двигателей питающихся синусоидальным током, ротора в котором используются магниты постоянного тока и датчика положения ротора.
Датчик положения ротора, встроенный в корпус двигателя, вырабатывает сигналы управления моментами времени и последовательностью коммутации токов в обмотках статора. Все поставляемые нами бесколлекторные электродвигатели имеют по три встроенных датчика Хола (Honeywell), расположенных под углом 120 градусов друг к другу.
Все бесколлекторные двигатели мы поставляем вместе с блоками управления, производимыми на том же заводе, что и сами двигатели (Fulling Motor, Китай), что гарантирует идеальную «совместимость» блоков управления и двигателей. Некоторые наши клиенты (как правило, использующие бесколлекторные двигатели в массовой серийной продукции с большими объемами выпуска) предпочитают разрабатывать устройства управления бесколлекторным двигателем самостоятельно. При этом они имеют возможность наиболее полно учесть нюансы рабочих режимов двигателей, и максимально снизить цену (себестоимость) блока управления бесколлекторным двигателем.
Бесколлекторные двигатели не имеют недостатков, присущих асинхронным двигателям (потребление реактивной мощности, потери в роторе) и синхронным двигателям (пульсация частоты вращения, выпадение из синхронизма).
Как и у коллекторных двигателей момент бесколлекторных двигателей прямо пропорционален току, а скорость зависит от напряжения питания и нагружающего момента.
Но бесколлекторные двигатели имеют преимущество по сравнению с коллекторными — это отсутствие трущихся и истираемых частей, переключающихся контактов и т.п. и, как следствие, высокий ресурс.
Основные достоинства бесколлекторных (вентильных) двигателей:
- высокое быстродействие и динамика, точность позиционирования
- линейность нагрузочных характеристик
- широкий диапазон изменения частоты вращения
- большая перегрузочная способность по моменту
- высокий срок службы (ресурс электродвигателя ограничен, по большому счету, только сроком службы подшипников)
- высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
- низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
- существенно более низкий уровень электромагнитных шумов по сравнению с коллекторными моторами
Области применения бесколлекторных двигателей
С силу своих достоинств бесколлекторные двигатели получили широкое распространение во многих отраслях промышленности. Незаменимыми оказываются они в медицинской технике — низкий уровень электромагнитных излучений, низкий уровень шума и высокий ресурс определили лидирующую роль бесколлекторного привода во многих узлах медицинской аппаратуры. Также бесколлекторные электродвигатели традиционно используются для работы в опасных средах. Отсутствие трущихся частей, способных вызвать искру, позволяет применять бесколлекторные двигатели в нефтегазовой промышленности, например, в качестве трубозапорных приводов для нефте- и газопроводов.
принцип действия. Электродвигатель вентильный своими руками
Вентильные электродвигатели во многом являются схожими с электромагнитными аналогами. Однако следует отметить, что устройства способны работать в сети постоянного и переменного тока. На сегодняшний день различают однофазные, двухфазные и трехфазные модификации.
В среднем мощность модели равняется 5 кВт. Рабочая частота двигателя не превышает 60 Гц. У некоторых модификаций применяется датчик положения ротора. Используются вентильные электродвигатели чаще всего для компрессоров и вентиляционных систем.
Схема устройства
Обычный двигатель включает в себя статорную коробку с якорем, а также ротор. Коллектор в маломощных модификациях устанавливается щеточного типа. Если рассматривать однофазные вентильные электродвигатели, то у них предусмотрен полюсный наконечник. За ним располагается специальный вал вращения. У мощных моделей есть сердечник ротора. Для возбуждения цепи применяется бендикс. Вал у двигателей вентильного двигателя вращается со специальным диском.
Принцип работы
Принцип действия двигателя строится на магнитной индукции. Процесс заключается в возбуждении обмотки статора. Происходит это путем подачи напряжения на бендикс. У многих модификаций также применяется датчик положения ротора. Для подключения регуляторов используются клеммные коробки. Для фиксации вала применяются зажимные кольца. У сверхмощных двигателей есть втягивающее реле. Оно необходимо для усиления электромагнитного поля.
Модель своими руками
Сделать электродвигатель (вентильный) своими руками довольно сложно. В первую очередь для сборки потребуется магнитный статор. В некоторых случаях ротор используют со стальным якорем. Далее потребуется заготовить вал с головкой. По диаметру он должен подходить под кольцо. Статор в данном случае обязан быть с первичной обмоткой, которая может выдерживать напряжение в 220 В.
Для подключения двигателя вентильного типа понадобится проводник. Подсоединяться он обязан к клеммной коробке. У некоторых модификаций вал крепится на диске. Таким образом, процесс набора оборотов происходит быстро. Для того чтобы избежать случаев коротких замыканий в цепи, используют уплотнитель.
Реактивная модификация
Сделать вентильный реактивный электродвигатель своими руками можно только на базе щеточного коллектора. В первую очередь потребуется подобрать ротор с обмоткой. Далее под него устанавливается вал. В некоторых случаях его используют с объемной насадкой. Для уменьшения силы трения понадобится небольшое кольцо на роликовых подшипниках.
Далее на вентильный реактивный электродвигатель устанавливается бендикс. В данном случае диск фиксируется на шпонке. Клеммная коробка обязана располагаться в задней части двигателя. Вал при этом должен находиться в центральной части корпуса. Вентиляционные отверстия чаще всего делают над ротором.
Устройства постоянного тока
Вентильный электродвигатель постоянного тока можно сложить на базе щеточного коллектора, который способен выдерживать большое выходное напряжение. После фиксации статора нужно заняться ротором. Для этого подбирается вал и диск небольшого диаметра. Также потребуется мощное втягивающее реле. Некоторые применяют его с высоковольтной обмоткой. На этом этапе особое внимание следует уделить фиксации сердечника для возбуждения обмотки. Используются погружные вентильные электродвигатели постоянного тока, как правило, в самолетостроении. У некоторых моделей предусмотрена сложная схема воздушного охлаждения с каналами.
Модели переменного тока
Сделать модель данного типа довольно просто. Однако для сборки потребуется бендикс. В данном случае его необходимо сразу подбирать со стальным сердечником. Некоторые специалисты рекомендуют применять алюминиевые наконечники. Однако проводимость тока у них невысокая. Непосредственно подача напряжения осуществляется через клеммную коробку.
Во многих модификациях щеточный коллектор устанавливается в передней части корпуса. Таким образом, вал можно использовать небольшого диаметра. Контактные кольца крепятся, если делается двигатель большой мощности. Для того чтобы уменьшить силу трения, можно использовать подшипники. Устанавливать их следует вблизи коллектора.
Двигатели однофазного типа
Для приводов небольшой мощности подходит однофазный вентильный электродвигатель. Принцип работы устройств основан на повышении индуктивности магнитного поля. Для этого применяется бесщеточный коллектор. Бендиксы в устройствах отсутствуют. Также важно отметить, что статоры могут использоваться только с большой проводимостью. Однако в первую очередь для сборки потребуется качественный ротор. Устанавливать его следует вблизи вала.
Следующим шагом необходимо наварить кольцо. Диск при этом обязан располагаться на другой стороне вала. Для охлаждения двигателя вентильного типа подойдет вентилятор. У некоторых модификаций для усиления индукции применяются втягивающие реле.
Двухфазные модели
Двухфазные вентильные электродвигатели можно собрать самостоятельно. Для этого специалисты рекомендуют использовать мощные бендиксы. В некоторых случаях применяются статоры с первичной обмоткой. Для фиксации ротора потребуется прочный корпус. В данном случае наконечники следует использовать с хорошей проводимостью.
Для того чтобы электромагнитное поле усиливалось равномерно, применяются катушки различной чувствительности. Втягивающие реле устанавливаются позади статоров. Вал в конструкция обязан находиться на диске. Для его фиксации применяются шпонки.
Трехфазные устройства
Трехфазовым вентильным электродвигателем называют устройство, работающее по принципу возрастания индукции магнитного поля. У моделей бендиксы устанавливаются только с высокой чувствительностью. В данном случае для усиления электромагнитного поля применяются полюсные наконечники. Непосредственно статоры используются с лапами. У некоторых модификаций есть щеткодержатели. Также важно отметить, что трехфазные вентильные электродвигатели часто применяются для работы приводов на 20 кВт. Частотность в данном случае не превышает 60 Гц. Вал у моделей обязан вращаться свободно. Для этого производители оснащают устройства роликовыми подшипниками. У многих моделей есть специальные проводники, которые соединяются с клеммной коробкой. Непосредственно подача напряжения происходит через силовой кабель.
Модель с низкочастотным бендиксом
Низкочастотные бендиксы позволяют стабильно повышать индуктивность в цепи. Многие модели данного типа отличаются своей чувствительностью. Для того чтобы собрать устройство самостоятельно, необходимо подобрать хороший статор. Модификации с якорями не подойдут.
Также важно отметить, что низкочастотные бендиксы не способны работать с втягивающими реле. Все это приводит к быстрому перегреву двигателя. Для того чтобы исправить ситуацию, потребуется мощный вентилятор. Также следует предусмотреть небольшую катушку. За счет этого обмотка сможет выдерживать напряжение в 220 В. Чтобы избежать случаев коротких замыканий, применяют щеткодержатель.
Применение высокочастотных бендиксов
Сделать двигатель с высокочастотным бендиксом довольно просто. Для этого потребуется простой статор. Непосредственно ротор подбирается с первичной обмоткой. Чтобы повысить обороты вала используют специальные заточные диски. У многих конфигураций применяются втягивающие реле. Также важно отметить, что для сборки двигателя данного типа необходим качественный щеткодержатель. Для его фиксации используют контактные кольца. Чтобы уменьшить силу вибрации, применяются уплотнители разной жесткости. Во многих конфигурациях над ротором устанавливается кожух.
Использование тягового реле
Тяговые реле очень часто устанавливаются на примышленный вентильный электродвигатель. Принцип работы устройств строится на умеренном увеличении силы магнитного поля. В данном случае происходит последовательное возбуждение обмотки. Для того чтобы самостоятельно собрать модификацию, следует использовать щеточный коллектор.
Также в этой ситуации не обойтись без катушки главного полюса. Однако в первую очередь нужно зафиксировать ротор с валом. После этого можно будет заняться клеммной коробкой. Первичная обмотка у двигателя вентильного типа обязана выдерживать выходное напряжение в 220 В. Отдельное внимание следует уделить статору. Для уменьшения силы вибрации используются уплотнители большой жесткости. Для фиксации вала понадобится стопорное кольцо.
Конструкция и принцип действия приводов клапанов
Приводы клапанов
Приводы клапанавыбираются на основе ряда факторов, включая крутящий момент, необходимый для работы клапана, и необходимость автоматического срабатывания. Типы приводов включают ручной дублер, ручной рычаг, электродвигатель, пневматические, соленоидные, гидравлические поршневые и самоприводные. Все приводы, кроме ручного маховика и рычага, могут быть адаптированы к автоматическому срабатыванию.
Ручные, фиксированные и ударные приводы
Ручные приводы могут переводить арматуру в любое положение, но не позволяют работать в автоматическом режиме.Самый распространенный тип механического привода — маховик. К этому типу относятся маховики, прикрепленные к штоку, штурвалы-молотки и штурвалы, соединенные со штоком через шестерни.
Маховики, прикрепленные к штоку
Как показано на изображении, правые штурвалы, прикрепленные к штоку, обеспечивают только механическое преимущество колеса. Когда эти клапаны подвергаются воздействию высоких рабочих температур, их заедание затрудняет работу.
Маховик с молотком
Как показано на изображении, маховик с молотком свободно проходит часть своего поворота, а затем ударяется о выступ на вспомогательном колесе.Вторичное колесо прикреплено к штоку клапана. При таком расположении клапан может быть полностью закрыт для плотного закрытия или открываться, если он застрял в закрытом состоянии.
Коробка передач с ручным приводом
Если для клапана с ручным управлением требуется дополнительное механическое преимущество, крышка клапана оснащается зубчатыми головками с ручным управлением, как показано на рисунке. Специальный гаечный ключ или маховик, прикрепленный к валу шестерни, позволяет одному человеку управлять клапаном, когда могут потребоваться два человека без преимущества передачи.Поскольку для одного оборота штока клапана необходимо несколько оборотов шестерни, время работы больших клапанов исключительно велико. Использование переносных пневмодвигателей, подключенных к валу-шестерне, сокращает время работы клапана.
Коробка передач с ручным приводом
Если для клапана с ручным управлением требуется дополнительное механическое преимущество, крышка клапана оснащается зубчатыми головками с ручным управлением, как показано на рисунке. Специальный гаечный ключ или маховик, прикрепленный к валу шестерни, позволяет одному человеку управлять клапаном, когда могут потребоваться два человека без преимущества передачи.Поскольку для одного оборота штока клапана необходимо несколько оборотов шестерни, время работы больших клапанов исключительно велико. Использование переносных пневмодвигателей, подключенных к валу-шестерне, сокращает время работы клапана.
Приводы электродвигателей
Электродвигатели допускают ручное, полуавтоматическое и автоматическое управление клапаном. Двигатели используются в основном для функций открытия-закрытия, хотя они могут быть адаптированы для позиционирования клапана в любой точке открытия, как показано на изображении ниже.Обычно это реверсивный высокоскоростной двигатель, подключенный через зубчатую передачу для снижения скорости двигателя и, таким образом, увеличения крутящего момента на штоке. Направление вращения двигателя определяет направление движения диска.
Электрический привод может быть полуавтоматическим, например, когда двигатель запускается системой управления. Маховик, который может быть соединен с зубчатой передачей, обеспечивает ручное управление клапаном. Обычно предусмотрены концевые выключатели для автоматической остановки двигателя при полностью открытом и полностью закрытом положениях клапана.Концевые выключатели приводятся в действие либо физически положением клапана, либо торсионно крутящим моментом двигателя.
Пневматические приводы
Пневматические приводы, показанные на изображении ниже, обеспечивают автоматический или полуавтоматический режим работы клапана. Эти приводы преобразуют воздушный сигнал в движение штока клапана за счет давления воздуха, действующего на диафрагму или поршень, соединенный со штоком. Пневматические приводы используются в дроссельных клапанах для открытия-закрытия, где требуется быстрое действие.Когда давление воздуха закрывает клапан, а действие пружины открывает клапан, привод называется прямым. Когда давление воздуха открывает клапан, а действие пружины закрывает клапан, привод называется реверсивным. У дуплексных приводов воздух подается с обеих сторон диафрагмы. Перепад давления на диафрагме позиционирует шток клапана. Автоматическая работа обеспечивается, когда воздушные сигналы автоматически управляются схемами. Полуавтоматический режим работы обеспечивается ручными переключателями в цепи клапанов управления воздухом.
Гидравлические приводы
Гидравлические приводы обеспечивают полуавтоматическое или автоматическое позиционирование клапана, аналогично пневматическим приводам. Эти приводы используют поршень для преобразования сигнального давления в движение штока клапана. Гидравлическая жидкость подается с обеих сторон поршня, в то время как другая сторона сливается или удаляется. В качестве гидравлической жидкости используется вода или масло. Электромагнитные клапаны обычно используются для автоматического управления гидравлической жидкостью, чтобы управлять открытием или закрытием клапана.Ручные клапаны также могут использоваться для управления гидравлической жидкостью; таким образом обеспечивая полуавтоматический режим работы.
Клапаны с автоматическим приводом
Самоуправляемые клапаны используют системную жидкость для позиционирования клапана. Предохранительные клапаны, предохранительные клапаны, обратные клапаны и конденсатоотводчики являются примерами самоприводных клапанов. Все эти клапаны используют некоторые характеристики системной жидкости для приведения в действие клапана. Для работы этих клапанов не требуется никаких источников энергии вне системной энергии жидкости.
Клапаны с электромагнитным приводом
Клапаны с электромагнитным приводомобеспечивают автоматическое позиционирование клапана «открыто-закрыто», как показано на рисунке ниже. Большинство клапанов с электромагнитным приводом также имеют ручное дублирование, которое позволяет ручное позиционирование клапана до тех пор, пока дублирование позиционируется вручную. Соленоиды позиционируют клапан, притягивая магнитную пробку, прикрепленную к штоку клапана. В одинарных соленоидных клапанах давление пружины противодействует движению пробки, когда на соленоид подается питание.Эти клапаны могут быть расположены так, что подача питания на соленоид либо открывает, либо закрывает клапан. Когда питание на соленоид прекращается, пружина возвращает клапан в противоположное положение. Два соленоида могут использоваться для открытия и закрытия путем подачи питания на соответствующий соленоид.
Одиночные электромагнитные клапаны называются открытыми при отказе или закрытыми при отказе в зависимости от положения клапана при обесточенном соленоиде. Аварийно открытые электромагнитные клапаны открываются давлением пружины и закрываются при подаче питания на соленоид.Аварийно закрытые электромагнитные клапаны закрываются давлением пружины и открываются при подаче питания на соленоид. Двойные электромагнитные клапаны обычно выходят из строя «как есть». То есть положение клапана не меняется, когда оба соленоида обесточены.
Одно из применений электромагнитных клапанов — в пневматических системах, таких как те, которые используются для подачи воздуха к пневматическим приводам клапанов. Электромагнитные клапаны используются для управления подачей воздуха к пневматическому приводу и, таким образом, положением клапана с пневматическим приводом.
Скорость силовых приводов
Соображения безопасности на предприятии определяют скорость клапана для определенных предохранительных клапанов.Если система должна быть очень быстро изолирована или открыта, требуется очень быстрое срабатывание клапана. Если открытие клапана приводит к нагнетанию относительно холодной воды в горячую систему, необходимо более медленное открытие, чтобы минимизировать тепловой удар. При проектировании выбирается привод для предохранительных клапанов на основе требований к скорости и мощности, а также наличия энергии для привода.
Как правило, наиболее быстрое срабатывание обеспечивается гидравлическими, пневматическими и соленоидными приводами. Однако соленоиды не подходят для больших клапанов, потому что их размер и требования к мощности будут чрезмерными.Кроме того, для гидравлических и пневматических приводов требуется система для обеспечения гидравлической или пневматической энергии. Скорость срабатывания в любом случае может быть установлена путем установки отверстий подходящего размера в гидравлических или пневматических линиях. В некоторых случаях клапан закрывается давлением пружины, которому противодействует гидравлическое или пневматическое давление, чтобы клапан оставался открытым.
Электродвигатели обеспечивают относительно быстрое срабатывание. Фактическая скорость клапана устанавливается комбинацией скорости двигателя и передаточного числа.Эта комбинация может быть выбрана для обеспечения полного хода клапана в диапазоне от примерно двух секунд до нескольких секунд.
Индикация положения клапана
Операторам требуется указание положения определенных клапанов, чтобы обеспечить грамотную эксплуатацию установки. Для таких клапанов предусмотрена дистанционная индикация положения клапана в виде индикаторов положения, которые указывают, открыты или закрыты клапаны. В схемах дистанционной индикации положения клапана используется датчик положения, который определяет положение штока и диска или положение привода.Одним из типов датчиков положения является механический концевой выключатель, который физически приводится в действие движением клапана.
Другой тип — это магнитные переключатели или трансформаторы, которые определяют движение своих магнитных сердечников, которые физически приводятся в действие движением клапана.
Местная индикация положения клапана относится к некоторой визуально различимой характеристике клапана, которая указывает положение клапана. Положение клапана с выдвижным штоком обозначается положением штока. Клапаны с неподнимающимся штоком иногда имеют маленькие механические стрелки, которые приводятся в действие приводом клапана одновременно с работой клапана.Клапаны с силовым приводом обычно имеют механический указатель, который обеспечивает локальную индикацию положения клапана. С другой стороны, некоторые клапаны не имеют функции индикации положения.
Краткое описание приводов клапанов
- Ручные приводы — наиболее распространенный тип приводов клапанов. Ручные приводы включают в себя штурвалы, прикрепленные непосредственно к штоку клапана, и штурвалы, прикрепленные через шестерни, чтобы обеспечить механическое преимущество.
- Приводы с электродвигателями состоят из реверсивных электродвигателей, соединенных со штоком клапана через зубчатую передачу, которая снижает скорость вращения и увеличивает крутящий момент.
- Пневматические приводы используют давление воздуха на одной или обеих сторонах диафрагмы для создания силы для позиционирования клапана.
- Гидравлические приводы используют жидкость под давлением на одной или обеих сторонах поршня для обеспечения силы, необходимой для позиционирования клапана.
- Электромагнитные приводы имеют магнитную пробку, прикрепленную к штоку клапана. Усилие для позиционирования клапана возникает из-за магнитного притяжения между пробкой на штоке клапана и катушкой электромагнита в приводе клапана.
Ссылки: DOE-HDBK-1018/2
На сайтах AUMA и Rotork вы найдете самые разные типы редукторов и приводов.
Каков принцип электродвигателя?
Все мы слышали об электродвигателях, но всегда возникал вопрос: «Каков принцип электродвигателя»? Электродвигатель — это устройство, преобразующее электрическую энергию в механическую. В основном существует три типа электродвигателей.
- Двигатель постоянного тока.
- Асинхронный двигатель.
- Синхронный двигатель.
Все эти двигатели работают по более или менее одинаковому принципу. Работа электродвигателя в основном зависит от взаимодействия магнитного поля с током.
Принцип действия электродвигателя: движение электродвигателя за счет электромагнетизма
Основная идея электродвигателя действительно проста: вы помещаете в него электричество с одного конца, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять какой-либо машиной.Как это работает на практике? Как именно преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, нам нужно вернуться почти на 200 лет назад.
Предположим, вы берете кусок обычного провода, делаете из него большую петлю и прокладываете его между полюсами мощного постоянного подковообразного магнита. Теперь, если вы подключите два конца провода к батарее, провод ненадолго подпрыгнет. Удивительно, когда видишь это впервые. Это похоже на волшебство! Но есть совершенно научное объяснение.
Когда электрический ток начинает течь по проводу, он создает вокруг него магнитное поле. Если вы поместите провод рядом с постоянным магнитом, это временное магнитное поле будет взаимодействовать с полем постоянного магнита. Вы знаете, что два расположенных рядом магнита либо притягиваются, либо отталкиваются. Точно так же временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнита, и это то, что заставляет провод подпрыгивать.
Принцип действия электродвигателя: правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобную мнемонику (вспомогательную память), называемую правилом левой руки Флеминга (иногда называемым правилом моторики).
Вытяните большой, указательный и второй пальцы левой руки так, чтобы все три были под прямым углом. Если вы укажете пальцем C в направлении тока C (который течет от положительного к отрицательному полюсу батареи), а первый палец F — в направлении поля F (который течет от северного полюса магнита к южному), ваш thu M b покажет направление, в котором движется провод M .
Это…
- F Первый палец = F ield
- Se C на пальце = C текущее
- Чт M b = M otion
Принцип работы электродвигателя: Принцип работы электродвигателя
Теоретически предположим, что мы сгибаем наш провод в квадратную U-образную петлю, так что фактически через магнитное поле проходят два параллельных провода. Один из них отводит электрический ток от нас по проводу, а другой возвращает ток обратно.Поскольку ток течет в проводах в противоположных направлениях, правило левой руки Флеминга говорит нам, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включаем электричество, один из проводов будет двигаться вверх, а другой — вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно — и мы были бы на пути к созданию электродвигателя. Но этого не может произойти с нашей нынешней настройкой: провода быстро запутаются.Более того, если бы катушка могла вращаться достаточно далеко, произошло бы кое-что еще.
Когда катушка достигает вертикального положения, она переворачивается, поэтому электрический ток течет через нее в противоположном направлении. Теперь силы на каждой стороне катушки меняются местами. Вместо того, чтобы постоянно вращаться в одном и том же направлении, он движется назад в том направлении, откуда только что пришел! Представьте себе электропоезд с таким двигателем: он продолжает двигаться вперед и назад на месте, фактически никуда не уезжая.
На практике есть два способа решить эту проблему. Один из них — использовать электрический ток, который периодически меняет направление, известный как переменный ток (AC). В небольших двигателях с батарейным питанием, которые мы используем дома, лучшим решением является добавление компонента, называемого коммутатором, к концам катушки.
Не беспокойтесь о бессмысленном техническом названии: это немного старомодное слово «коммутация» немного похоже на слово «коммутируют». Это просто означает движение вперед и назад так же, как поездка на работу означает движение туда и обратно.В своей простейшей форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины, и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждой половине коммутатора.
Электрический ток от аккумуляторной батареи подключается к электрическим клеммам двигателя. Они подают электроэнергию в коммутатор через пару незакрепленных соединителей, называемых щетками, сделанных либо из кусочков графита (мягкий углерод, похожий на «грифель» карандаша), либо из тонких кусков упругого металла, который (как следует из названия) «задевает» коммутатор.Когда коммутатор установлен, при прохождении электричества по цепи катушка будет постоянно вращаться в одном и том же направлении.
Такой простой экспериментальный двигатель, как этот, не способен развивать большую мощность. Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки.
На практике двигатель также имеет постоянный магнит, изогнутый в форме круга, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью, и это называется ротором. Ротор также включает в себя коммутатор.
Вы можете посмотреть здесь, чтобы получить более наглядное представление о принципе работы электродвигателей.
Подробнее о Linquip
Простое руководство по эффективности двигателя: что это такое и что делатьПринцип работы электродвигателя: Работа двигателей постоянного тока
Принцип работы двигателя постоянного тока в основном зависит от правила левой руки Флеминга.В базовом двигателе постоянного тока между магнитными полюсами размещен якорь. Если обмотка якоря питается от внешнего источника постоянного тока, ток начинает течь по проводникам якоря. Поскольку проводники проводят ток внутри магнитного поля, они испытывают силу, которая стремится вращать якорь.
Предположим, что проводники якоря под N полюсами полевого магнита проводят ток вниз (крестики), а проводники под S полюсами проводят ток вверх (точки).Применяя правило левой руки Флеминга, можно определить направление силы F, испытываемой проводником под N полюсами, и силу, испытываемую проводниками под S-полюсами. Обнаружено, что в любой момент силы, действующие на проводники, имеют такое направление, что они стремятся вращать якорь.
Опять же, из-за этого вращения проводники под N-полюсами попадают под S-полюс, а проводники под S-полюсами — под N-полюс. В то время как проводники идут от N-полюса к S-полюсу и S-полюса к N-полюсу, направление тока через них меняется на противоположное с помощью коммутатора.
Из-за этого реверсирования тока все проводники проходят под N-полюсами, переносят ток в нисходящем направлении, а все проводники под S-полюсами несут ток в восходящем направлении, как показано на рисунке. Следовательно, каждый проводник испытывает силу на N-полюсе в одном и том же направлении, и то же самое верно для проводников, проходящих под S-полюсами. Это явление помогает развивать постоянный и однонаправленный крутящий момент.
Принцип работы электродвигателя: работа асинхронных двигателей
Работа электродвигателя в случае асинхронного двигателя немного отличается от электродвигателя постоянного тока.В однофазном асинхронном двигателе, когда на обмотку статора подается однофазное питание, создается пульсирующее магнитное поле, а в трехфазном асинхронном двигателе, когда трехфазное питание подается на трехфазную обмотку статора, возникает вращающееся магнитное поле. производится.
Ротор асинхронного двигателя может быть с обмоткой или с короткозамкнутым ротором. Каким бы ни был тип ротора, проводники на нем закорочены на концах, образуя замкнутый контур. Из-за вращающегося магнитного поля поток проходит через воздушный зазор между ротором и статором, проходит мимо поверхности ротора и, таким образом, разрезает проводник ротора.
Следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках замкнутого ротора будет циркулировать индуцированный ток. Величина наведенного тока пропорциональна скорости изменения магнитной связи во времени. Опять же, эта скорость изменения магнитной связи пропорциональна относительной скорости между ротором и вращающимся магнитным полем. Согласно закону Ленца, ротор будет пытаться уменьшить все причины возникновения в нем тока. Следовательно, ротор вращается и пытается достичь скорости вращающегося магнитного поля, чтобы уменьшить относительную скорость между ротором и вращающимся магнитным полем.
Принцип работы электродвигателя: работа синхронных двигателей
В синхронном двигателе, когда на неподвижную трехфазную обмотку статора подается сбалансированное трехфазное питание, создается вращающееся магнитное поле, которое вращается с синхронной скоростью. Теперь, если внутри этого вращающегося магнитного поля поместить электромагнит, он будет магнитно заблокирован с вращающимся магнитным полем, и первый будет вращаться с вращающимся магнитным полем с той же скоростью, что и с синхронной скоростью.
Принцип работы электромагнитного клапана
Что такое электромагнитный клапан?
Электромагнитный клапан — это промышленное оборудование, управляемое электромагнетизмом. Это автоматический базовый элемент для управления жидкостью. Он относится к приводу, но не ограничивает гидравлическое давление и пневматическое управление. В промышленной системе управления электромагнитный клапан используется для регулирования направления, расхода, скорости и других параметров среды. Электромагнитный клапан может координироваться с различными цепями для реализации ожидаемого управления, при этом гарантируются как точность управления, так и гибкость.
Электромагнитный клапан состоит из катушки соленоида и магнитопровода. Это корпус клапана, содержащий одно или несколько отверстий. Когда катушка пропускается или отключается подачей питания, работа магнитопровода приводит к тому, что жидкость проходит через корпус клапана и отключается, чтобы достичь цели изменения направления жидкости. Электромагнитный компонент соленоидного клапана состоит из неподвижного стального сердечника, подвижного стального сердечника, катушки и так далее. Корпус клапана состоит из сердечника золотникового клапана, жгута золотникового клапана и пружинного основания.Катушка соленоида устанавливается непосредственно на корпусе клапана, в то время как корпус клапана заключен в уплотнительную трубу, так что представляет собой простую и компактную комбинацию.
Как работает электромагнитный клапан?
Электромагнитный клапан имеет закрытую камеру внутри и вентилируемые отверстия в разных положениях. Каждое отверстие связано с разными масляными трубами. В камере посередине расположен поршень. С двух сторон расположены две части электромагнитов. Электрифицирующая магнитная катушка будет притягивать корпус клапана к своей стороне, так что различные выпускные отверстия для масла будут открываться или закрываться посредством управления движением корпуса клапана.Однако впускное отверстие для масла постоянно открыто. Гидравлическое масло будет поступать в разные отводные трубы. Давление масла будет использоваться для приведения в действие поршня масляного цилиндра, который будет приводить в движение шток поршня, а затем механическое устройство. Таким образом, посредством управления током электромагнитного клапана будет контролироваться механическое движение. Кроме того, давайте вкратце узнаем о принципе работы двух основных типов электромагнитных клапанов.
1. Электромагнитный клапан прямого действия
- Принцип работы
При включении питания катушка соленоида генерирует электромагнитную силу, которая поднимает запорный элемент из седла клапана и открывает клапан.Когда питание отключается, электромагнитная сила исчезает, и пружина прижимает запорный элемент к седлу клапана, чтобы закрыть клапан. - Характеристики
Может нормально работать в вакууме, отрицательном и нулевом давлении. Однако диаметр обычно не превышает 25 мм.
2. Электромагнитный клапан с пилотным управлением
- Принцип работы
При включении питания электромагнитная сила открывает пилотное отверстие, и давление в верхней камере быстро уменьшается, образуя перепад давления, низкий вверху и высокий внизу вокруг запорного элемента.Давление жидкости способствует перемещению запорного элемента вверх для открытия клапана. Когда питание отключено, усилие пружины закрывает пилотное отверстие. Давление через байпасное отверстие быстро образует перепад давления, высокий вверху и низкий внизу вокруг запорного элемента. Давление жидкости заставляет запорный элемент двигаться вниз и закрывать клапан. - Характеристики
Диапазон давления жидкости имеет относительно высокий верхний предел. Он может быть установлен произвольно, при соблюдении условия разности давлений жидкости.
Купите 2-ходовой, 3-ходовой и 5-ходовой пневматический соленоидный клапан с высокой производительностью и низкой ценой на ATO.com для управления воздушным потоком.
Как работают приводы — основные приводы для управления движением
Привод — это двигатель, который преобразует энергию в крутящий момент, который затем перемещает или управляет механизмом или системой, в которую он встроен. Он может как вносить движение, так и предотвращать его. Привод обычно работает от электричества или давления (например, гидравлического или пневматического).Система управления может управляться механически или электронно, управляться программным обеспечением или управляться человеком.
Что заставляет моторы работать? Узлы ротора и статора. Они обычно называются первичной и вторичной обмотками двигателя. Напряжение подается на узел статора, первичную обмотку, что приводит к возникновению потока тока к узлу ротора или вторичной обмотке. Взаимодействие этих двух элементов создает магнитное поле, которое приводит в движение.Есть два типа двигателей: двигатели переменного тока, которые обычно двигаются с постоянной скоростью; и двигатели постоянного тока, которые движутся с переменной скоростью.
Скорость двигателя переменного тока определяется частотой приложенного напряжения числом магнитных полюсов. Внутри двигателя переменного тока находятся узел статора и узел ротора. Если двигатель переменного тока является асинхронным, ротор вращается медленнее, чем поле статоров. Если это синхронный двигатель, ротор и статор движутся синхронно.
В двигателях постоянного тока узел ротора вращается, пытаясь выровняться со сборкой статора, но этому препятствует деталь, известная как коммутатор.В определенный момент коммутатор переключает поле ротора, в то время как сборка статора остается неподвижной. Это дает средства для управления скоростью и позиционированием.
Существует несколько типов приводов, каждый из которых работает несколько иначе, чем другой.
- Пневматические двигатели имеют пневматический привод с использованием вакуума или сжатого воздуха, который преобразует энергию в линейное или вращательное движение. Давление и расход воздуха определяют как скорость, так и крутящий момент. Они используются в приложениях, в которых точность позиционирования не является требованием.
- Гидравлические двигатели перемещают поршень по трубке с помощью жидкости под давлением. Чем выше давление жидкости, тем выше создаваемый крутящий момент. Гидравлические двигатели обеспечивают линейное, вращательное или колебательное движение, но ускорение ограничено. Гидравлические двигатели обычно неэффективны, могут быть пожароопасными и требуют большего, чем обычно, обслуживания.
- Двигатель сцепления / тормоза работает, соединяя постоянно вращающийся вал с нагрузкой, останавливаясь только при отсоединении нагрузки. Хотя этот двигатель прост в применении, относительно недорог и отлично подходит для легких нагрузок, его ускорение неконтролируемое, а также неточное.
- Шаговые двигатели (двигатель постоянного тока) являются электромеханическими, преобразующими цифровой импульс во вращательное движение или смещение. Хотя шаговые двигатели не подходят для переменных нагрузок и, как правило, не являются энергоэффективными, они отлично подходят для постоянных нагрузок и точности позиционирования. В двигателях переменного тока
- (индукционного типа) используются электрические пускатели для обеспечения соединений, запуска и / или защиты от перегрузки. В то время как асинхронные двигатели обычно считаются имеющими постоянную скорость, внедрение микропроцессорной технологии обеспечивает некоторые возможности регулирования скорости.
- Серводвигатели (двигатель постоянного тока) чрезвычайно эффективны с небольшими недостатками. Сервоприводы обеспечивают контроль скорости и точность положения благодаря своему устройству обратной связи, они небольшие и имеют относительно низкую цену.
Основы гидравлических двигателей | Гидравлика и пневматика
Загрузить эту статью в формате .PDF
Этот тип файла включает графику и схемы с высоким разрешением, если это применимо.
Гидравлические двигатели всех типов имеют общие конструктивные особенности: площадь приводной поверхности, подверженной перепаду давления; способ синхронизации подачи текучей среды под давлением к поверхности давления для достижения непрерывного вращения; и механическое соединение между поверхностью и выходным валом.
Способность прижимных поверхностей выдерживать силу, характеристики утечки каждого типа двигателя и эффективность метода, используемого для соединения прижимной поверхности и выходного вала, определяют максимальную производительность двигателя с точки зрения давления, расхода, выходной крутящий момент, скорость, объемный и механический КПД, срок службы и физическая конфигурация.
Терминология
Объем двигателя означает объем жидкости, необходимый для поворота выходного вала двигателя на один оборот.Наиболее распространенные единицы рабочего объема двигателя — дюймы 3 или см 3 на оборот. Рабочий объем гидравлического двигателя может быть фиксированным или переменным. Двигатель с постоянным рабочим объемом обеспечивает постоянный крутящий момент. Регулировка количества входящего потока в двигатель изменяет скорость. Двигатель с регулируемым рабочим объемом обеспечивает переменный крутящий момент и переменную скорость. При постоянном входном потоке и давлении изменение рабочего объема может изменять соотношение крутящего момента и скорости в соответствии с требованиями нагрузки.
Выходной крутящий момент выражается в дюймах-фунтах или фут-фунтах.Это функция давления в системе и рабочего объема двигателя. Номинальные значения крутящего момента двигателя обычно указываются для определенного перепада давления на двигателе. Теоретические цифры показывают крутящий момент на валу двигателя без механических потерь.
Момент отрыва — это крутящий момент, необходимый для вращения неподвижной нагрузки. Чтобы начать движение, требуется больший крутящий момент, чем для поддержания его движения.
Рабочий момент может относиться к нагрузке двигателя или к двигателю.Когда это относится к нагрузке, это указывает на крутящий момент, необходимый для поддержания вращения нагрузки. Когда это относится к двигателю, это указывает на фактический крутящий момент, который двигатель может развивать, чтобы поддерживать вращение нагрузки. Рабочий крутящий момент учитывает неэффективность двигателя и представляет собой процент от его теоретического крутящего момента. Крутящий момент обычных шестеренчатых, лопастных и поршневых двигателей составляет примерно 90% от теоретического.
Пусковой крутящий момент означает способность гидравлического двигателя запускать нагрузку. Он указывает величину крутящего момента, который двигатель может развить, чтобы начать вращение нагрузки.В некоторых случаях он значительно меньше рабочего крутящего момента двигателя. Пусковой крутящий момент также может быть выражен в процентах от теоретического крутящего момента. Пусковой крутящий момент для обычных шестеренчатых, лопастных и поршневых двигателей составляет от 70% до 80% от теоретического.
Механический КПД — это отношение фактического крутящего момента к теоретическому крутящему моменту.
Пульсация крутящего момента — это разница между минимальным и максимальным крутящим моментом, передаваемым при заданном давлении за один оборот двигателя.
Скорость двигателя зависит от рабочего объема двигателя и объема жидкости, подаваемой в двигатель.
Максимальная скорость двигателя — это скорость при определенном давлении на входе, которую двигатель может выдерживать в течение ограниченного времени без повреждений.
Минимальная скорость двигателя — это самая медленная, непрерывная и непрерывная скорость вращения, доступная для выходного вала двигателя.
Проскальзывание — это утечка через двигатель или жидкость, которая проходит через двигатель без выполнения работы.
Мотор-редукторы
Рис. 1. Выходной крутящий момент двигателя с внешним редуктором является функцией давления на один зуб, поскольку давление на другие зубья находится в гидравлическом балансе. Нажмите на изображение для увеличения.
Двигатели с внешним зацеплением состоят из пары согласованных шестерен, заключенных в один корпус (рис. 1) . Обе шестерни имеют одинаковую форму зубьев и приводятся в движение жидкостью под давлением. Одна шестерня соединена с выходным валом. Другой — бездельник.Жидкость под давлением входит в корпус в точке зацепления шестерен. Он заставляет шестерни вращаться и следует по пути наименьшего сопротивления по периферии корпуса. Жидкость выходит под низким давлением с противоположной стороны двигателя. Точные допуски между шестернями и корпусом помогают контролировать утечку жидкости и увеличивать объемный КПД. Износостойкие пластины по бокам шестерен предотвращают осевое перемещение шестерен и помогают контролировать утечки.
Рис. 2. Героторный двигатель с прямым приводом имеет внутренние и внешние зубчатые передачи.Обе шестерни вращаются во время работы. Нажмите на изображение для увеличения.
Двигатели с внутренним зацеплением делятся на две категории. Героторный двигатель с прямым приводом состоит из внутреннего и внешнего зубчатого колеса и выходного вала (рис. 2) . Внутренняя шестерня имеет на один зубец меньше, чем внешняя. Зубья имеют такую форму, что все зубья внутренней шестерни всегда находятся в контакте с какой-либо частью внешней шестерни. Когда жидкость под давлением вводится в двигатель, обе шестерни вращаются. Корпус двигателя имеет впускное и выпускное отверстия в форме почки.Центры вращения двух шестерен разделены на определенную величину, известную как эксцентриситет. Центр внутренней шестерни совпадает с центром выходного вала.
Жидкость под давлением входит в двигатель через впускное отверстие (рис. 2a) . Поскольку внутренняя шестерня имеет на один зубец меньше, чем внешняя, между внутренними зубьями 6 и 1 и внешним гнездом A образуется карман. Впускное отверстие в форме почки сконструировано таким образом, что, как только объем этого кармана достигает своего максимума, поток жидкости перекрывается, а концы зубьев 6 и 1 внутренней шестерни обеспечивают уплотнение (рис.2б) .
По мере того, как пара внутренних и внешних шестерен продолжает вращаться, между внутренними зубьями 6 и 5 и внешним гнездом G (рис. 2c) образуется новый карман. Между тем, карман, образованный между внутренними зубьями 6 и 1 и внешним гнездом A, , перемещался напротив выходного отверстия в форме почки, постоянно стекая по мере уменьшения объема кармана. Постепенное, дозируемое изменение объема карманов во время впуска и выпуска обеспечивает плавный, равномерный поток жидкости с минимальным изменением давления (или пульсацией ).
Из-за дополнительного зуба на внешней шестерне, внутренние зубья шестерни перемещаются впереди внешнего на один зуб за оборот. На Фигуре 2c внутренний зуб 4 вставлен во внешнее гнездо E . В следующем цикле внутренний зуб 4 войдет во внешнее гнездо F . Это обеспечивает низкую относительную дифференциальную скорость между шестернями.
Рис. 3. Орбитальный героторный двигатель имеет стационарную внешнюю шестерню и вращающуюся внутреннюю шестерню. Ротор и вал вращаются против часовой стрелки, но геометрическое место точки X расположено по часовой стрелке.Коммутатор или пластина клапана, показанная ниже на иллюстрации каждой ступени вращения двигателя, обеспечивает давление и проход в резервуар для жидкости под давлением. Нажмите на изображение для увеличения.
Орбитальный героторный двигатель состоит из набора согласованных зубчатых колес, муфты, выходного вала и коллектора или пластины клапана (рис. 3) . Стационарная внешняя шестерня имеет на один зуб больше, чем вращающаяся внутренняя шестерня. Коммутатор вращается с той же скоростью, что и внутренняя шестерня, и всегда обеспечивает жидкость под давлением и канал для резервуара в соответствующие промежутки между двумя шестернями.
В процессе работы зуб 1 внутренней шестерни точно совмещен с гнездом D внешней шестерни (рис. 3a) . Точка y — это центр неподвижной шестерни, а точка x — это центр ротора. Если бы не было жидкости, ротор мог бы свободно вращаться вокруг гнезда D в любом направлении. Он может двигаться к посадочному зубцу 2 в гнездо E или, наоборот, к посадочному зубцу 6 в гнездо J .
Когда рабочая жидкость течет в нижнюю половину объема между внутренней и внешней шестернями, если для верхней половины объема между внутренней и внешней шестернями предусмотрен проход к резервуару, создается момент, который вращает внутреннюю шестерню против часовой стрелки и начинает посадку зуба 2 в гнездо E .Зуб 4 в момент, показанный на рис. 3а, обеспечивает уплотнение между давлением и возвратной жидкостью.
Однако по мере продолжения вращения геометрическое место точки x будет направлено по часовой стрелке. По мере того, как каждый последующий зуб ротора устанавливается в гнездо, зуб, расположенный прямо напротив установленного зуба на роторе, становится уплотнением между нагнетательной и возвратной жидкостью (фиг. 3b) . Жидкость под давлением продолжает заставлять ротор входить в зацепление по часовой стрелке, пока он вращается против часовой стрелки.
Из-за одного дополнительного гнезда в неподвижной шестерне в следующий раз, когда зуб 1 сядет, он будет в гнезде J . В этот момент вал повернулся на одну седьмую оборота, а точка x переместилась на шесть седьмых своего полного круга. На рисунке 3c зуб 2 сопрягается с гнездом D , а точка x снова выровнялась между гнездом D и точкой y , указывая на то, что ротор совершил один полный оборот внутри внешней шестерни.Зуб 1 сместился на угол 60 ° от своей исходной точки на рис. 3а; Чтобы вал совершил один оборот, потребуется 42 (или 627) зубчатых зацеплений или гидравлических циклов.
Коммутатор или пластина клапана содержит проходы для давления и резервуара для каждого зуба ротора (рис. 3d, e и f) . Каналы расположены таким образом, чтобы они не создавали давления или обратного потока к соответствующему отверстию, поскольку зуб находится в его гнезде. В остальное время проходы заблокированы или обеспечивают подачу жидкости под давлением или проход резервуара в соответствующей половине двигателя между шестернями.
Рис. 4. Героторный двигатель с роликовыми лопастями включает в себя вращающиеся лопатки, снижающие износ. Нажмите на изображение для увеличения.
Роликовый героторный двигатель представляет собой разновидность орбитального героторного двигателя (рис. 4) . Он имеет неподвижную коронную шестерню (или статор) и подвижную планетарную шестерню (или ротор). Вместо того, чтобы удерживаться двумя опорными подшипниками, эксцентриковый рычаг планетарной передачи удерживается за счет зацепления шестизубчатого ротора и семицеточного статора.Вместо прямого контакта между статором и ротором установлены роликовые лопатки, образующие камеры смещения. Роликовые лопатки снижают износ, позволяя использовать двигатели в замкнутых гидростатических контурах высокого давления в качестве приводов колес с прямым монтажом.
Лопастные двигатели
Рис. 5. Лопастные двигатели (показан сбалансированный тип) имеют лопатки в роторе с прорезями. Нажмите на изображение для увеличения.
Лопастные двигатели имеют ротор с прорезями, установленный на приводном валу, который приводится в движение ротором (рис.5) . Лопатки, плотно вставленные в пазы ротора, перемещаются в радиальном направлении для уплотнения кулачкового кольца. Кольцо имеет два основных и два малых радиальных участка, соединенных переходными участками или аппарелями. Эти контуры и приложенные к ним давления уравновешены диаметрально.
В некоторых конструкциях легкие пружины прижимают лопатки радиально к контуру кулачка, чтобы обеспечить уплотнение при нулевой скорости, чтобы двигатель мог развивать пусковой крутящий момент. На более высоких скоростях пружинам помогает центробежная сила.Радиальные канавки и отверстия в лопатках всегда уравновешивают радиальные гидравлические силы, действующие на лопатки.
Жидкость под давлением входит и выходит из корпуса двигателя через отверстия в боковых пластинах на аппарелях. Жидкость под давлением, поступающая во входные отверстия, перемещает ротор против часовой стрелки. Ротор транспортирует жидкость к отверстиям аппарели на выпускных отверстиях для возврата в резервуар. Если бы давление было введено в выпускные отверстия, он повернул бы двигатель по часовой стрелке.
Ротор отделен в осевом направлении от поверхностей боковых пластин пленкой жидкости.Передняя боковая пластина прижимается к кулачковому кольцу давлением и поддерживает оптимальные зазоры в зависимости от изменения температуры и давления.
Лопастные двигатели обеспечивают хороший КПД, но не такой высокий, как у поршневых двигателей. Однако лопастные двигатели обычно стоят меньше, чем поршневые двигатели соответствующей мощности. Однако срок службы лопастного двигателя обычно меньше, чем у поршневого. Лопастные двигатели доступны с рабочим объемом 20 дюймов. 3 / об.Некоторые модели с низкой скоростью / высоким крутящим моментом имеют рабочий объем до 756 дюймов. 3 / об. За исключением моделей с большим рабочим объемом и низкой скоростью, лопастные двигатели имеют ограниченную способность к работе на низких оборотах.
Поршневые двигатели
Figurte 6. Радиально-поршневые двигатели имеют цилиндр, прикрепленный к ведомому валу. Ствол содержит несколько поршней, совершающих возвратно-поступательное движение в радиальных каналах. Нажмите на изображение для увеличения.
Радиально-поршневые двигатели имеют цилиндр, прикрепленный к ведомому валу (рис.6) . Ствол содержит несколько поршней, совершающих возвратно-поступательное движение в радиальных каналах. Концы наружных поршней упираются в упорное кольцо. Жидкость под давлением проходит через стержень в центре цилиндра цилиндра, выталкивая поршни наружу. Поршни прижимаются к упорному кольцу, и силы реакции вращают ствол.
Сдвиг ползуна в сторону для изменения хода поршня изменяет рабочий объем двигателя. Когда осевые линии цилиндра и корпуса совпадают, поток жидкости отсутствует, и поэтому цилиндр останавливается.Перемещение ползуна мимо центра меняет направление вращения двигателя.
Радиально-поршневые двигатели очень эффективны. Хотя высокая точность, необходимая при производстве радиально-поршневых двигателей, увеличивает начальные затраты, они обычно имеют долгий срок службы. Они обеспечивают высокий крутящий момент при относительно низких скоростях вращения вала и превосходную работу на низких скоростях с высоким КПД. Кроме того, у них ограниченные высокоскоростные возможности. Радиально-поршневые двигатели имеют рабочий объем до 1000 дюймов. 3 / об.
Аксиально-поршневые двигатели также используют принцип возвратно-поступательного движения поршня для вращения выходного вала, но движение является осевым, а не радиальным. Их КПД аналогичен радиально-поршневым двигателям. Первоначально аксиально-поршневые двигатели стоили больше, чем лопастные или редукторные двигатели сопоставимой мощности. Как и радиально-поршневые двигатели, они имеют длительный срок службы. Следовательно, их более высокая начальная стоимость может не полностью отражать ожидаемые общие затраты в течение срока службы единицы оборудования.
В целом аксиально-поршневые двигатели обладают отличными скоростными характеристиками. Однако, в отличие от радиально-поршневых двигателей, они ограничены на низких рабочих скоростях. Встроенный тип будет плавно работать до 100 об / мин, а тип с изогнутой осью обеспечит плавный выход до диапазона 4 об / мин. Доступны аксиально-поршневые двигатели с рабочим объемом от долей до 65 дюймов. 3 / об.
Рис. 7. Двигатели с рядным поршнем создают крутящий момент за счет давления, оказываемого на концы поршней, совершающих возвратно-поступательное движение в блоке цилиндров.Приводной вал двигателя и блок цилиндров центрируются на одной оси. Нажмите на изображение для увеличения.
Рядные поршневые двигатели создают крутящий момент за счет давления, оказываемого на концы поршней, которые совершают возвратно-поступательное движение в блоке цилиндров (рис. 7) . В рядном исполнении карданный вал двигателя и блок цилиндров центрированы на одной оси. Давление на концах поршней вызывает реакцию на наклонную наклонную шайбу и вращает блок цилиндров и вал двигателя.Крутящий момент пропорционален площади поршней и является функцией угла, под которым расположена наклонная шайба.
Эти двигатели выпускаются в моделях с фиксированным и регулируемым рабочим объемом. Угол наклона шайбы определяет рабочий объем двигателя. В вариативной модели тарелка автомата перекоса установлена в качающейся вилке, а угол может быть изменен различными способами, от простого рычага или маховика до сложных сервоуправлений. Увеличение угла наклонной шайбы увеличивает допустимый крутящий момент, но снижает частоту вращения карданного вала.И наоборот, уменьшение угла снижает допустимый крутящий момент, но увеличивает частоту вращения приводного вала (если не уменьшается давление жидкости). Угловые упоры включены, поэтому крутящий момент и скорость остаются в рабочих пределах.
Компенсатор изменяет рабочий объем двигателя в ответ на изменения рабочей нагрузки. Подпружиненный поршень соединен с бугелем и перемещает его в ответ на изменение рабочего давления. Любое увеличение нагрузки сопровождается соответствующим увеличением давления в результате дополнительных требований к крутящему моменту.Затем система управления автоматически регулирует вилку таким образом, что крутящий момент увеличивается при небольшой нагрузке. В идеале компенсатор регулирует рабочий объем для максимальной производительности при всех условиях нагрузки, вплоть до настройки предохранительного клапана.
Рис. 8. Поршневые двигатели с изогнутой осью создают крутящий момент за счет реакции на давление на поршни, совершающие возвратно-поступательное движение. Блок цилиндров и карданный вал установлены под углом друг к другу. Реакция идет на фланец карданного вала. Нажмите на изображение для увеличения.
Поршневые двигатели с изогнутой осью развивают крутящий момент за счет реакции на давление возвратно-поступательных поршней (рис. 8) . В этой конструкции блок цилиндров и карданный вал установлены под углом друг к другу. Реакция идет на фланец приводного вала.
Изменение скорости и крутящего момента с изменением угла, от заданной минимальной скорости с максимальным смещением и крутящим моментом под углом примерно 30 ° до максимальной скорости с минимальным смещением и крутящим моментом примерно 7.5Ëš. Доступны модели как с фиксированным, так и с переменным рабочим объемом.
Прочие образцы
Двигатели с вращающимся абатментом имеют упор A , который вращается, проходя через поворотную лопатку B , в то время как второй упор C находится в альтернативном уплотнительном зацеплении со ступицей ротора (рис. 9) . Крутящий момент передается непосредственно от жидкости к ротору и от ротора к валу. Зубчатые шестерни между выходным валом и поворотными упорами удерживают лопатку ротора и упоры в правильной фазе.Ролик в канавке «ласточкин хвост» на конце лопатки ротора обеспечивает надежное уплотнение, которое практически не имеет трения и относительно нечувствительно к износу. Силы уплотнения высоки, а потери на трение низкие из-за контакта с качением.
Рис. 9. Абатмент A двигателя роторного абатмента поворачивается мимо вращающейся лопасти B, в то время как второй абатмент C контактирует с уплотнительной пластиной, разделяя области высокого и низкого давления. Уплотнительные штифты в концах лопастей и на периферии ротора обеспечивают уплотнение почти без трения.Ротор будет вращаться по часовой стрелке, когда жидкость под давлением подается на порт 1. Щелкните изображение, чтобы увеличить его.
Винтовой двигатель по существу представляет собой насос с обратным направлением потока жидкости. Винтовой двигатель использует три зацепляющихся винта: приводной ротор и два промежуточных ротора. Промежуточные роторы действуют как уплотнения, которые образуют последовательные изолированные спиральные камеры в плотно прилегающем корпусе ротора. Перепад давления, действующий на участки резьбы винтовой пары, развивает крутящий момент двигателя.
Промежуточные роторы плавают в своих отверстиях. Скорость вращения винтового набора и вязкость жидкости создают гидродинамическую пленку, которая поддерживает холостые роторы, подобно валу в подшипнике скольжения, что позволяет работать на высоких скоростях. Набор роликовых винтов обеспечивает бесшумную работу без вибрации.
Выбор гидромотора
Применение гидравлического двигателя обычно диктует требуемую мощность и диапазон скорости двигателя, хотя фактическая требуемая скорость и крутящий момент иногда могут изменяться при сохранении требуемой мощности.Выбранный тип двигателя зависит от требуемой надежности, срока службы и производительности.
После того, как тип жидкости определен, выбор фактического размера основан на ожидаемом сроке службы и экономических показателях всей установки на машине. Гидравлический двигатель, работающий с мощностью ниже номинальной, продлевает срок службы более чем пропорционально сокращению работы ниже номинальной мощности.
Максимальная мощность, производимая двигателем, достигается при работе с максимальным давлением в системе и максимальной скоростью вала.Если двигатель всегда будет эксплуатироваться в этих условиях, его начальная стоимость будет самой низкой. Но там, где скорость на выходе должна быть уменьшена, необходимо учитывать общую стоимость двигателя со снижением скорости, чтобы оптимизировать общие затраты на установку привода.
Расчет гидравлического двигателя
В качестве примера того, как рассчитать размер гидравлического двигателя для соответствия применению, рассмотрим следующее: приложение требует 5 л.с. при 3000 об / мин, с доступным давлением подачи 3000 фунтов на квадратный дюйм и давлением в обратной линии 100 фунтов на квадратный дюйм; перепад давления составляет 2900 фунтов на квадратный дюйм.Требуемый теоретический крутящий момент рассчитывается по формуле:
T = (63,0252 × л.с.) / N
где:
T — крутящий момент, фунт-дюйм и
Н — скорость, об / мин.
Для условия T = 105 фунт-дюймов рабочий объем двигателя рассчитывается как:
D = 2π T ÷ ∠† Pe M
где:
D — рабочий объем, дюйм. 3 / рев.
∠† P — перепад давления, фунт / кв. Дюйм и
e M — механический КПД,%.
Если механический КПД составляет 88%, то D составляет 0,258 дюйма. 3 / об.
Расчет необходимого расхода:
Q = DN /231 e V ,
где:
Q — расход, галлонов в минуту, и
e V — объемный КПД,%.
Если объемный КПД составляет 93%, то Q составляет 3,6 галлона в минуту.
Давление в этих уравнениях — это разница между давлением на входе и выходе. Таким образом, любое давление в выпускном отверстии снижает выходной крутящий момент гидравлического двигателя.
Коэффициент полезного действия для большинства двигателей будет довольно постоянным при работе от половинного до полного номинального давления и в средней части номинального диапазона скоростей. По мере приближения скорости к крайнему значению эффективность снижается.
Более низкое рабочее давление приводит к снижению общего КПД из-за фиксированных внутренних потерь при вращении, которые характерны для любого гидравлического двигателя.Уменьшение рабочего объема от максимального в двигателях с переменным рабочим объемом также снижает общий КПД.
Неисправности гидромотора
Большинство проблем с двигателем вызвано неподходящей жидкостью, плохим обслуживанием или неправильной эксплуатацией. Двигатель ничем не отличается от других компонентов гидравлической системы. В первую очередь, он должен иметь чистую жидкость в достаточном количестве, надлежащего качества и вязкости. Плохая программа технического обслуживания занимает второе место в возникновении серьезных проблем.Типичные листы в программе включают:
• Отсутствие проверки и ремонта трубопроводов и соединений для устранения утечек: неисправные соединения могут привести к попаданию грязи и воздуха в систему, снижению давления и нарушению работы.
• Неправильная установка двигателя: несоосность вала двигателя может вызвать износ подшипников, что может привести к снижению эффективности. Смещенный вал также может снизить крутящий момент, увеличить сопротивление трения и нагрев, а также привести к выходу вала из строя.
• Невозможность найти причину неисправности двигателя: если двигатель выходит из строя, всегда ищите причину неисправности.Очевидно, что если причину не устранить, сбой повторится.
Наконец, превышение рабочих пределов двигателя приводит к отказу двигателя. Каждый двигатель имеет конструктивные ограничения по давлению, скорости, крутящему моменту, рабочему объему, нагрузке и температуре. • Чрезмерное давление может вызвать нагревание из-за проскальзывания двигателя и привести к превышению предельного крутящего момента двигателя. • Чрезмерная скорость может нагревать и изнашивать подшипники и другие детали. внутренние детали. Чрезмерный крутящий момент может вызвать усталость и нагрузку на подшипники и вал двигателя, особенно в тех случаях, когда требуется частое реверсирование двигателя.Чрезмерная нагрузка может вызвать усталость подшипников и вала. Кроме того, чрезмерная температура может снизить эффективность, поскольку масло становится более жидким и может вызвать быстрый износ из-за отсутствия смазки.
Загрузить статью в формате .PDF
Этот тип файла включает графику и схемы с высоким разрешением, если это применимо.
Поворотный привод — обзор
3.6.2 Поворотные приводы
Поворотные приводы преобразуют пневматическую, гидравлическую или электрическую энергию в механическое вращение.Пневматические поворотные приводы используют давление сжатого воздуха для создания колебательных вращательных движений. Две наиболее распространенные конфигурации пневматических поворотных приводов включают в себя конфигурации с реечной передачей и лопастями. Приводы с реечной передачей состоят из поршня и рейки, которые движутся линейно и вызывают вращение ведущей шестерни и выходного вала. Реечные приводы могут состоять из одной, двух или нескольких реек. Привод лопасти состоит из лопасти, установленной на центральном валу, заключенном в цилиндрическую камеру.Лопатка вращается при повышении давления и продолжает вращаться, пока не достигнет конца хода. Давление воздуха, приложенное к другой стороне лопасти, заставляет ее вращать вал в противоположном направлении. Основными преимуществами пневматических поворотных приводов являются простота использования, долговечность, высокое усилие на выходе и возможность использования во взрывоопасных средах.
Гидравлические поворотные приводы обычно используются в приложениях, требующих высоких крутящих моментов. Общие конструктивные конфигурации гидравлических поворотных приводов включают поршневой, лопастной или зубчатый.В приводах поршневого типа гидравлическая жидкость под давлением используется для смещения поршня и создания вращательного движения. Примером поршневого привода является двигатель с наклонной шайбой. В двигателе с наклонной шайбой масло под давлением используется для толкания поршня вперед и назад и создания вращения наклонной шайбы. Качающаяся шайба соединена с валом, который вращается вместе с тарелкой. Принцип действия пластинчатых приводов аналогичен принципу действия пневматического поворотного привода. Жидкость под давлением используется для вращения лопасти, которая вызывает вращательное движение центрального вала.В конфигурации зубчатого типа жидкость под давлением перемещает зацепленные шестерни для создания вращательного движения вала, соединенного с шестернями. Ключевые преимущества гидравлических поворотных приводов включают простоту конструкции и способность создавать высокие крутящие моменты и низкие скорости.
Электрические поворотные приводы обычно используются в мехатронных системах. Примеры поворотных электрических приводов включают двигатели постоянного тока (DC), синхронные и асинхронные двигатели, двигатели переменного тока (AC), шаговые двигатели и серводвигатели.На проводник с током, помещенный в магнитное поле, будет действовать сила, пропорциональная плотности потока магнитного поля, току, протекающему в проводнике, и длине проводника. Сила и противодвижущая сила (ЭДС) будут создавать вращение и связанный с ним крутящий момент.
Читатель, вероятно, уже знаком с основным принципом работы ротора, статора, коллектора и щеток. Ротор — это вращающаяся часть, статор — неподвижная часть, коммутатор — это вращающийся электрический переключатель, который периодически меняет направление тока между ротором и внешней цепью, и, наконец, щеточный ток передачи между неподвижной и вращающейся частями.
Принцип двигателя: когда проводник с током расположен во внешнем магнитном поле, перпендикулярном проводнику, на проводник действует сила, перпендикулярная ему самому и внешнему магнитному полю. Правило правой руки можно использовать для определения направления силы, действующей на проводник. Если большой палец правой руки указывает в направлении тока в проводнике, а пальцы правой руки указывают в направлении внешнего магнитного поля, то сила, действующая на проводник, направлена наружу от ладони правой руки.
Электродвигатель состоит из постоянного внешнего полевого магнита (статора) и спирального проводящего амперметра (ротора), который может свободно вращаться внутри полевого магнита. Щетки и коммутатор (сконструированный по-разному, если на якорь подается переменный или постоянный ток) подключают якорь к внешнему источнику напряжения. Скорость вращения двигателя зависит от силы тока, протекающего через него, количества катушек на якоре, силы полевого магнита, проницаемости якоря и механической нагрузки, связанной с валом (рис.3.24).
Рис. 3.24. Принцип работы двигателя: щеточный двигатель постоянного тока
Адаптирован от M.B. Попович, Биомеханика и робототехника, 351 стр., Copyright © 2014, Pan Stanford Publishing Pte. Ltd., Сингапур, ISBN 978-981-4411-37-0 (твердый переплет), 978-981-4411-38-7 (электронная книга). Ноябрь 2013 г. doi: 10.4032 / 9789814411387.Статор находится в неподвижном электрическом элементе. Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, с одним полюсом каждого магнита, обращенным к центру группы.Ротор — это вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, с полюсами, обращенными к полюсам статора. Ротор, очевидно, находится внутри статора и установлен на валу двигателя. Ротор будет следовать и вращаться вместе с магнитным полем статора, поскольку разные магнитные полюса притягиваются друг к другу, а подобные полюса отталкиваются (рис. 3.25).
Рис. 3.25. Двигатель переменного тока с ротором с постоянными магнитами, обмотанным статором и датчиком положения ротора.
По материалам M.B. Попович, Биомеханика и робототехника, 351 стр., Copyright © 2014, Pan Stanford Publishing Pte. Ltd., Сингапур, ISBN 978-981-4411-37-0 (твердый переплет), 978-981-4411-38-7 (электронная книга). Ноябрь 2013 г. doi: 10.4032 / 9789814411387. В щеточных двигателяхиспользуется намотанный якорь, а в бесщеточных двигателях используется ротор с постоянными магнитами. В обычных электродвигателях постоянного тока с коммутацией щеток используются щетки, обычно сделанные из графита с некоторым содержанием металлов. Бесщеточные двигатели коммутируют электронно с помощью ротора с постоянными магнитами, статора с обмоткой и датчика положения ротора.
В синхронных двигателях скорость ротора и частота тока, протекающего через двигатель, синхронны. В асинхронных двигателях скорость и частота не совпадают.
Серводвигатель обычно работает с малой мощностью и может использоваться для точного позиционирования механических элементов. Он состоит из небольшого двигателя постоянного тока, потенциометра и цепи управления. По мере вращения двигателя сопротивление потенциометра изменяется. Когда вал двигателя достигает заданного положения, питание двигателя отключается.Он использует пропорциональное управление, при котором скорость пропорциональна разнице между целевой позицией и фактической позицией. Это высокоэффективный двигатель, поскольку он работает ровно столько, сколько необходимо. Он управляется широтно-импульсной модуляцией. Сервоприводы могут быть переменного или постоянного тока. Двигатель постоянного тока является наиболее распространенным и менее дорогим.
Шаговые двигатели — это бесщеточные синхронные двигатели постоянного тока, которые делят вращательное движение на равное количество шагов. Шаговые двигатели способны к непрерывному движению, в отличие от серводвигателей, идеально подходят для быстрого позиционирования на короткие расстояния, обладают высоким выходным крутящим моментом, высокой точностью и недорогой опцией.
Что такое электромагнитный клапан и как он работает?
Электромагнитные клапаны используются везде, где требуется автоматическое регулирование потока жидкости. Они все в большей степени используются в самых разных типах установок и оборудования. Разнообразие доступных конструкций позволяет выбрать клапан в соответствии с конкретным применением.
ОБЩЕЕ
Электромагнитные клапаны используются везде, где требуется автоматическое регулирование потока жидкости.Они все в большей степени используются в самых разных типах установок и оборудования. Разнообразие доступных конструкций позволяет выбрать клапан в соответствии с конкретным применением.
СТРОИТЕЛЬСТВО
Электромагнитные клапаны — это блоки управления, которые при включении или отключении электропитания либо перекрывают, либо пропускают поток жидкости. Привод выполнен в виде электромагнита. При подаче напряжения создается магнитное поле, которое натягивает плунжер или поворотный якорь против действия пружины.В обесточенном состоянии плунжер или поворотный якорь возвращается в исходное положение под действием пружины.
РАБОТА КЛАПАНА
По режиму срабатывания различают клапаны прямого действия, клапаны с внутренним управлением и клапаны с внешним управлением. Еще одна отличительная черта — это количество подключений к портам или количество потоков («путей»).
КЛАПАНЫ ПРЯМОГО ДЕЙСТВИЯ
В соленоидном клапане прямого действия уплотнение седла прикреплено к сердечнику соленоида.В обесточенном состоянии отверстие седла закрыто, которое открывается, когда клапан находится под напряжением.
КЛАПАНЫ ПРЯМОГО ДЕЙСТВИЯ 2-ХОДОВЫЕ
Двухходовые клапаны — это запорные клапаны с одним входным и одним выходным отверстиями (рис. 1). В обесточенном состоянии пружина сердечника при помощи давления жидкости удерживает уплотнение клапана на седле клапана, перекрывая поток. При подаче напряжения сердечник и уплотнение втягиваются в катушку соленоида, и клапан открывается. Электромагнитная сила больше, чем объединенная сила пружины и силы статического и динамического давления среды.
фигура 1
3-ХОДОВЫЕ КЛАПАНЫ ПРЯМОГО ДЕЙСТВИЯ
Трехходовые клапаны имеют три штуцера и два седла клапана. Одно уплотнение клапана всегда остается открытым, а другое закрытым в обесточенном режиме. Когда катушка находится под напряжением, режим меняется на противоположный. Трехходовой клапан, показанный на рис. 2, выполнен с сердечником плунжерного типа. Различные операции клапана могут выполняться в зависимости от того, как текучая среда соединена с рабочими портами на рис. 2. Давление текучей среды нарастает под седлом клапана.Когда катушка обесточена, коническая пружина плотно прижимает нижнее уплотнение сердечника к седлу клапана и перекрывает поток жидкости. Порт A выпускается через R. Когда катушка находится под напряжением, сердечник втягивается, седло клапана в Порте R закрывается подпружиненным верхним уплотнением сердечника. Текучая среда теперь течет от P к A.
фигура 2 В отличие от версий с сердечником плунжерного типа, клапаны с поворотным якорем имеют все портовые соединения в корпусе клапана. Изолирующая диафрагма предотвращает контакт текучей среды с камерой змеевика.Клапаны с поворотным якорем могут использоваться для управления любым трехходовым клапаном. Базовый принцип конструкции показан на рис. 3. Клапаны с поворотным якорем стандартно оснащены ручным дублером.
фигура 3
ЭЛЕКТРОМАГНИТНЫЕ КЛАПАНЫ С ВНУТРЕННИМ ПИЛОТОМ
В клапанах прямого действия силы статического давления увеличиваются с увеличением диаметра отверстия, что означает, что магнитные силы, необходимые для преодоления сил давления, соответственно становятся больше.Поэтому электромагнитные клапаны с внутренним управлением используются для переключения более высоких давлений в сочетании с отверстиями большего размера; в этом случае перепад давления жидкости выполняет основную работу по открытию и закрытию клапана.
КЛАПАНЫ 2-ХОДОВЫЕ С ВНУТРЕННИМ ПИЛОТОМ
Электромагнитные клапаны с внутренним управлением оснащены 2- или 3-ходовым пилотным соленоидным клапаном. Мембрана или поршень обеспечивают уплотнение для седла главного клапана. Работа такого клапана показана на рис.4. Когда пилотный клапан закрыт, давление жидкости увеличивается с обеих сторон диафрагмы через выпускное отверстие. Пока существует перепад давления между впускным и выпускным портами, запорная сила доступна за счет большей эффективной площади в верхней части диафрагмы. Когда пилотный клапан открыт, давление сбрасывается с верхней стороны диафрагмы. Большая эффективная сила чистого давления снизу теперь поднимает диафрагму и открывает клапан. Как правило, клапаны с внутренним управлением требуют минимального перепада давления для обеспечения удовлетворительного открытия и закрытия.Omega также предлагает клапаны с внутренним управлением, спроектированные с соединенным сердечником и диафрагмой, которые работают при нулевом перепаде давления (рис. 5).
фигура 4
МНОГООБХОДИМЫЕ ЭЛЕКТРОМАГНИТНЫЕ КЛАПАНЫ С ВНУТРЕННИМ НАПРАВЛЕНИЕМ
4-ходовые электромагнитные клапаны с внутренним управлением используются в основном в гидравлических и пневматических системах для приведения в действие цилиндров двустороннего действия. Эти клапаны имеют четыре патрубка: впуск давления P, два патрубка A и B цилиндра и один патрубок выпуска R.4/2-ходовой тарельчатый клапан с внутренним управлением показан на рис. 6. В обесточенном состоянии пилотный клапан открывается на соединении между входом давления и пилотным каналом. Обе тарелки главного клапана теперь находятся под давлением и переключаются. Теперь соединение порта P подключено к A, а B может выходить через второй ограничитель через R.
цифра 5
КЛАПАНЫ С НАРУЖНЫМ УПРАВЛЕНИЕМ
В этих типах для приведения в действие клапана используется независимая управляющая среда.На рис. 7 показан поршневой клапан с угловым седлом и закрывающей пружиной. В безнапорном состоянии седло клапана закрыто. Трехходовой электромагнитный клапан, который может быть установлен на приводе, управляет независимой управляющей средой. Когда электромагнитный клапан находится под напряжением, поршень поднимается против действия пружины, и клапан открывается. Версия с нормально открытым клапаном может быть получена, если пружина расположена на противоположной стороне поршня привода. В этих случаях независимая управляющая среда подключается к верхней части привода.Версии двойного действия, управляемые 4/2-ходовыми клапанами, не содержат пружины.
рисунок 6
МАТЕРИАЛЫ
Все материалы, из которых изготовлены клапаны, тщательно отбираются в соответствии с различными типами применения. Материал корпуса, материала уплотнения и материала соленоида выбирается для оптимизации функциональной надежности, совместимости с жидкостями, срока службы и стоимости.
КУЗОВ
Корпуса клапанов нейтральной жидкости изготовлены из латуни и бронзы.Для жидкостей с высокими температурами, например пара, доступна коррозионно-стойкая сталь. Кроме того, полиамидный материал используется по экономическим причинам в различных пластиковых клапанах.
СОЛЕНОИДНЫЕ МАТЕРИАЛЫ
Все части электромагнитного привода, контактирующие с жидкостью, изготовлены из аустенитной коррозионно-стойкой стали. Таким образом обеспечивается устойчивость к коррозионному воздействию нейтральных или умеренно агрессивных сред.
МАТЕРИАЛЫ УПЛОТНЕНИЯ
Конкретные механические, термические и химические условия в приложении влияют на выбор материала уплотнения.Стандартным материалом для нейтральных жидкостей при температурах до 194 ° F обычно является FKM. Для более высоких температур используются EPDM и PTFE. Материал PTFE универсально устойчив практически ко всем техническим жидкостям.
НОМИНАЛЬНОЕ ДАВЛЕНИЕ — ДИАПАЗОН ДАВЛЕНИЯ
Все значения давления, приведенные в этом разделе, представляют собой манометрическое давление. Номинальное давление указано в фунтах на квадратный дюйм. Клапаны надежно работают в заданных диапазонах давления. Наши цифры действительны для диапазона пониженного напряжения от 15% до перенапряжения 10%.Если 3/2-ходовые клапаны используются в другом режиме, допустимый диапазон давления изменяется. Более подробная информация содержится в наших технических паспортах.
В случае работы в вакууме необходимо следить за тем, чтобы вакуум был на стороне выхода (A или B), в то время как более высокое давление, то есть атмосферное давление, подключено к входному отверстию P.
ЗНАЧЕНИЯ РАСХОДА
Скорость потока через клапан определяется конструкцией и типом потока.Размер клапана, требуемый для конкретного применения, обычно определяется номиналом Cv. Этот показатель разработан для стандартных единиц и условий, то есть расхода в галлонах в минуту и использования воды с температурой от 40 ° F до 86 ° F при перепаде давления 1 фунт / кв. Дюйм. Приведены значения Cv для каждого клапана. Стандартизированная система значений расхода также используется для пневматики. В этом случае воздушный поток в SCFM вверх по потоку и падение давления 15 фунтов на квадратный дюйм при температуре 68 ° F.
СОЛЕНОИДНЫЙ ПРИВОД
Общей особенностью всех электромагнитных клапанов Omega является система соленоидов с эпоксидной изоляцией.В этой системе вся магнитная цепь — катушка, соединения, ярмо и направляющая трубка сердечника — объединены в один компактный блок. Это приводит к тому, что высокая магнитная сила удерживается в минимальном пространстве, обеспечивая первоклассную электрическую изоляцию и защиту от вибрации, а также внешних коррозионных воздействий.
КАТУШКИ
Катушки Omega доступны для всех обычно используемых напряжений переменного и постоянного тока. Низкое энергопотребление, особенно в случае соленоидных систем меньшего размера, означает, что возможно управление через полупроводниковую схему.
рисунок 7 Доступная магнитная сила увеличивается по мере уменьшения воздушного зазора между сердечником и заглушкой, независимо от того, используется ли переменный или постоянный ток. Электромагнитная система переменного тока имеет большую магнитную силу, доступную при большем ходе, чем сопоставимая соленоидная система постоянного тока. Графики характеристического хода в зависимости от силы, показанные на рис. 8, иллюстрируют эту взаимосвязь.
Ток, потребляемый соленоидом переменного тока, определяется индуктивностью. С увеличением хода индуктивное сопротивление уменьшается и вызывает увеличение потребления тока.Это означает, что в момент обесточивания ток достигает максимального значения. Противоположная ситуация применима к соленоиду постоянного тока, где потребление тока зависит только от сопротивления обмоток. Сравнение во времени характеристик включения соленоидов переменного и постоянного тока показано на рис. 9. В момент подачи питания, то есть когда воздушный зазор максимален, электромагнитные клапаны потребляют гораздо более высокие токи, чем когда сердечник полностью заполнен. втянут, т. е. воздушный зазор закрыт.Это приводит к высокой производительности и расширенному диапазону давления. В системах постоянного тока после включения тока поток увеличивается относительно медленно, пока не будет достигнут постоянный ток удержания. Таким образом, эти клапаны могут управлять только более низким давлением, чем клапаны переменного тока, при тех же размерах отверстий. Более высокие давления могут быть получены только за счет уменьшения размера отверстия и, следовательно, пропускной способности.
ТЕПЛОВЫЕ ЭФФЕКТЫ
Когда на катушку соленоида подано напряжение, всегда выделяется определенное количество тепла.Стандартная версия электромагнитных клапанов имеет относительно небольшой подъем температуры. Они предназначены для достижения максимального повышения температуры 144 ° F в условиях непрерывной работы (100%) и при 10% перенапряжении. Кроме того, обычно допустима максимальная температура окружающей среды 130 ° F. Максимально допустимые температуры жидкости зависят от конкретных материалов уплотнения и корпуса. Эти цифры можно получить из технических данных.
ОПРЕДЕЛЕНИЕ ВРЕМЕНИ (VDE0580) ВРЕМЯ ОТВЕТА
Небольшие объемы и относительно высокие магнитные силы, связанные с электромагнитными клапанами, позволяют получить быстрое время отклика.Для специальных применений доступны клапаны с разным временем отклика. Время реакции определяется как время между подачей сигнала переключения и завершением механического открытия или закрытия.
ПО ПЕРИОДУ
Период включения определяется как время между включением и выключением тока соленоида.
ПЕРИОД ЦИКЛА
Общее время включенного и выключенного периодов — это период цикла. Предпочтительный период цикла: 2, 5, 10 или 30 минут.
ОТНОСИТЕЛЬНЫЙ РАБОЧИЙ ЦИКЛ
Относительный рабочий цикл (%) — это процентное отношение периода под напряжением к общему периоду цикла. Непрерывная работа (100% рабочий цикл) определяется как непрерывная работа до достижения установившейся температуры.
РАБОТА КЛАПАНА
Кодировка клапана всегда состоит из заглавной буквы.
