Что такое вентильный индукторный двигатель. Как устроен вентильный индукторный двигатель. Какие преимущества имеет вентильный индукторный двигатель. Как работает вентильный индукторный двигатель. Где применяется вентильный индукторный двигатель.
Что такое вентильный индукторный двигатель
Вентильный индукторный двигатель (ВИД) — это электрическая машина, в которой вращающий момент создается за счет изменения магнитного сопротивления при повороте ротора. Основными элементами конструкции ВИД являются:
- Статор с явно выраженными полюсами и обмотками
- Ротор с явно выраженными полюсами без обмоток и постоянных магнитов
- Электронный преобразователь для коммутации обмоток статора
- Датчик положения ротора
- Система управления
ВИД сочетает в себе простоту конструкции с возможностью точного управления скоростью и моментом. Это делает его перспективным типом электропривода для различных применений.
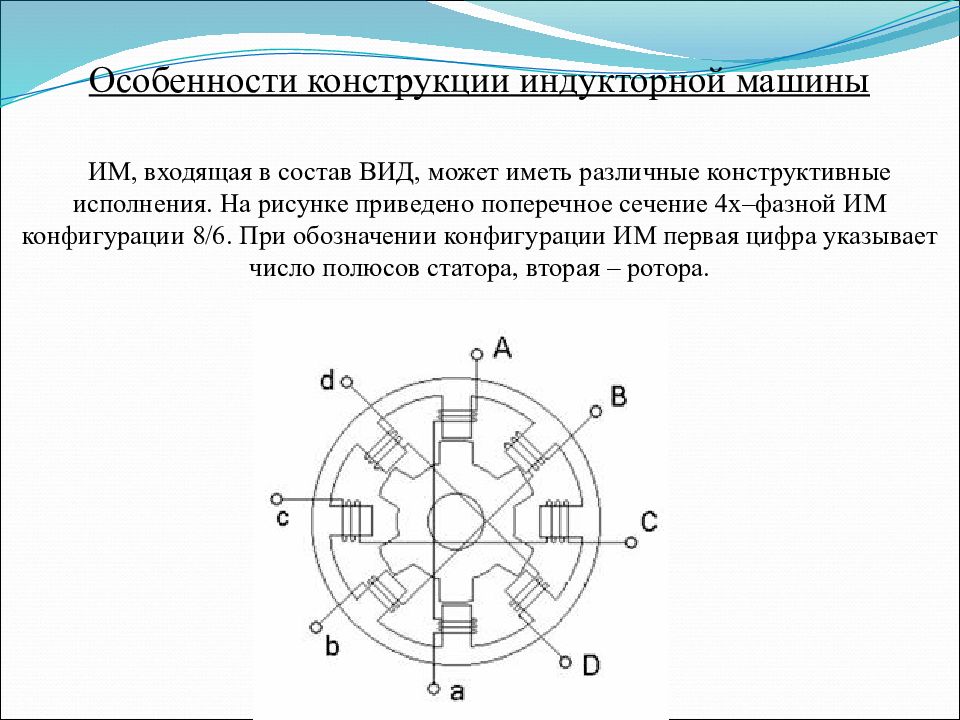
Особенности конструкции вентильного индукторного двигателя
Статор ВИД имеет явно выраженные полюса с сосредоточенными обмотками. Число полюсов статора обычно кратно числу фаз. Ротор также имеет явно выраженные полюса, но без обмоток и постоянных магнитов. Число полюсов ротора обычно отличается от числа полюсов статора.

Типичная конфигурация ВИД:
- 6/4 (6 полюсов статора, 4 полюса ротора) — трехфазный
- 8/6 (8 полюсов статора, 6 полюсов ротора) — четырехфазный
- 12/8 (12 полюсов статора, 8 полюсов ротора) — трех- или шестифазный
Чем отличается конструкция ротора ВИД от других электродвигателей? Каковы особенности обмоток статора ВИД?
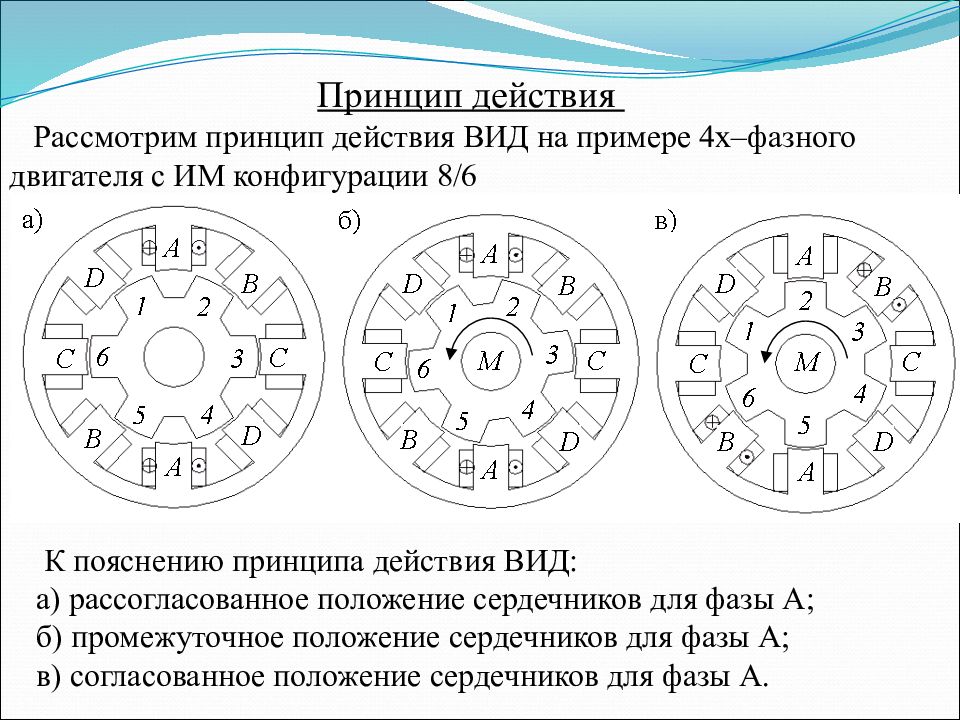
Принцип работы вентильного индукторного двигателя
Принцип работы ВИД основан на стремлении ротора занять положение с минимальным магнитным сопротивлением. При подаче тока в обмотку статора создается магнитный поток. Ротор стремится повернуться так, чтобы совместить свой полюс с полюсом статора и замкнуть магнитный поток. Последовательно коммутируя обмотки статора, можно заставить ротор непрерывно вращаться.
Основные этапы работы ВИД:
- Определение положения ротора датчиком
- Подача управляющего сигнала на электронный преобразователь
- Коммутация обмоток статора
- Создание вращающего магнитного поля
- Поворот ротора
За счет чего создается вращающий момент в ВИД? Как происходит коммутация обмоток статора?
Преимущества вентильных индукторных двигателей
ВИД обладают рядом важных преимуществ по сравнению с другими типами электродвигателей:
- Простая и надежная конструкция ротора
- Отсутствие скользящих контактов
- Высокий КПД (до 95%)
- Широкий диапазон регулирования скорости
- Высокая перегрузочная способность по моменту
- Хорошие массогабаритные показатели
- Низкая стоимость производства
Эти преимущества обусловлены особенностями конструкции и принципа действия ВИД. Простой ротор без обмоток повышает надежность и снижает затраты. Электронная коммутация обеспечивает гибкое управление.
Недостатки вентильных индукторных двигателей
Наряду с достоинствами, ВИД имеют и некоторые недостатки:
- Повышенный уровень шума и вибраций
- Пульсации момента
- Необходимость электронного преобразователя
- Сложность системы управления
- Высокая стоимость постоянных магнитов (для некоторых конструкций)
Эти недостатки ограничивают применение ВИД в некоторых областях. Однако постоянное совершенствование конструкции и систем управления позволяет минимизировать негативные эффекты.
Как можно уменьшить шум и вибрации ВИД? Какие методы используются для снижения пульсаций момента?
Области применения вентильных индукторных двигателей
Благодаря своим преимуществам, ВИД находят применение во многих отраслях:
- Электротранспорт (электромобили, электробусы)
- Бытовая техника (стиральные машины, пылесосы)
- Промышленные приводы (насосы, вентиляторы, компрессоры)
- Робототехника и автоматизация
- Аэрокосмическая отрасль
- Возобновляемая энергетика (ветрогенераторы)
Особенно эффективно использование ВИД в системах с частыми пусками, остановами и реверсами, а также требующих точного позиционирования.
Перспективы развития вентильных индукторных двигателей
Технология ВИД продолжает активно развиваться. Основные направления совершенствования:
- Оптимизация геометрии магнитной системы
- Применение новых магнитных материалов
- Разработка эффективных алгоритмов управления
- Интеграция силовой электроники и систем управления
- Снижение уровня шума и вибраций
Эти усовершенствования позволят расширить области применения ВИД и повысить их конкурентоспособность по сравнению с другими типами электроприводов.
Какие инновационные решения предлагаются для улучшения характеристик ВИД? Как может измениться конструкция ВИД в будущем?
Вентильно-индукторный двигатель и его особенности Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
ТЕХНИЧЕСКИЕ НАУКИ
ВЕНТИЛЬНО-ИНДУКТОРНЫИ ДВИГАТЕЛЬ И ЕГО ОСОБЕННОСТИ
Амангалиев Е.З.
PhD докторант «Satbayev University», г. Алматы, ул.Сатпаева 22, 050013, Республика Казахстан
Тлеугали У.К. магистрант 2-го года обучения А УЭС», г. Алматы, ул. Байтурсынова 126, 050060, Республика Казахстан
Аннотация. Машины постоянного тока, как правило, имеют более высокие технико-экономические показатели (линейность характеристик, высокий КПД, малые габариты и пр.), чем машины переменного тока. Существенный недостаток — наличие щеточного аппарата, который снижает надежность, увеличивает момент инерции, создает радиопомехи, взрывоопасность и т.д. Поэтому, естественно, актуальна задача создания бесконтактного (бесколлекторного) двигателя постоянного тока.
Решение этой задачи оказалось возможным с появлением полупроводниковых приборов. В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока, щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит. Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока, щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит. Для того чтобы решать задачи по контролю современных прецизионных систем, все чаще используется вентильный двигатель. Это характеризуется большим преимуществом таких приборов, а также активным формированием вычислительных возможностей микроэлектроники. Как известно, они могут обеспечить высокую плотность длительного момента и энергоэффективности по сравнению с другими видами двигателей.
Ключевые слова: вентильный двигатель, машина, бесколлекторный двигатель
1.Вентильно-индукторный двигатель
Вентильно-индукторный двигатель — это устройство, в котором предусмотрено переключающееся магнитное сопротивление. В нем преобразование энергии происходит за счет изменения индуктивности обмоток, которые располагаются на явно выраженных зубцах статора при передвижении зубчатого магнитного ротора. Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора. Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
Питание устройство получает от электрического преобразователя, поочередно переключающего обмотки двигателя в строгости по перемещению ротора. Вентильно-индукторный двигатель представляет собой комплексную сложную систему, в которой работают совместно разнообразные по своей физической природе компоненты. Для удачного проектирования таких устройств необходимы углубленные знания в области конструирования машин и механики, а также электроники, электромеханики и микропроцессорной техники.
В целом вентильные двигатели включают в себя три подсистемы: электронную, механическую, электрическую.
Двигатель состоит из следующих деталей:1. Задняя часть корпуса.2. Статор.3. Подшипник.4. Магнитный диск (ротор).5. Подшипник.6. Статор с обмоткой.7. Передняя часть корпуса. У вентильного двигателя имеется взаимосвязь между многофазной обмоткой статора и ротора. У них присутствуют постоянные магниты и встроенный датчик положения. Коммутация прибора реализовывается при помощи вентильного преобразователя, вследствие чего он и получил такое название. Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, тарельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов. В случае соединения обмоток «звездой» устройство имеет большие
Схема вентильного двигателя состоит из задней крышки и печатной платы датчиков, втулки подшипника, вала и самого подшипника, магнитов ротора, изолирующего кольца, обмотки, тарельчатой пружины, промежуточной втулки, датчика Холла, изоляции, корпуса и проводов. В случае соединения обмоток «звездой» устройство имеет большие
Рисунок- 1.Конструкция вентильного двигателя
постоянные моменты, поэтому такую сборку применяют для управления осями. В случае скрепления обмоток «треугольником» их можно использовать для работы с большими скоростями. Чаще всего количество пар полюсов вычисляется численностью магнитов ротора, которые помогают определить соотношение электрических и механических оборотов. Статор может быть изготовлен с безжелезным или железным сердечником. Используя такие конструкции с первым вариантом, можно обеспечить отсутствие притяжения магнитов ротора, но и в это же мгновение снижается на 20% эффективность двигателя из-за уменьшения значения постоянного момента.
2. Устройство вентильного двигателя
Устройство вентильного двигателя
Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла. Рассмотрим структуру вентильного двигателя на примере семейства двигателей Faulhaber (рис. 2).
1 2 3 4 5 б 7 S 9 10 И 12 13
1- Корпус электродвигателя
2- Диэлектрическая прослойка
3- Втулка
4- Пружина
5- Обмотка статора
6- Изоляционное кольцо
7- Постоянные магниты
Конструкция двигателя Faulhaber (рис. 2).
В данном случае в основе ротора лежит двухполюсный магнит, статора трехфазная обмотка, положение ротора определяется с помощью интегрированных в двигатель датчиков Холла. В общем случае ротор может содержать другое количество пар полюсов, а статор иметь более традиционную конструкцию, внешне сходную со статором асинхронной машины. Наиболее распространен статор с тремя обмотками, соединенными «звездой» (реже в «треугольник») без вывода средней точки. Как известно, именно трехфазная структура является наиболее эффективной при минимуме числа обмоток. При соединении обмоток «звездой» вентильный двигатель имеет большие постоянные момента и меньшие постоянные противо-ЭДС (при соотношении ?3) по сравнению с соединением «треугольником». Поэтому соединение «звездой» используется для управления осями, требующими больших моментов, а соединение «треугольником» — для больших скоростей.
Наиболее распространен статор с тремя обмотками, соединенными «звездой» (реже в «треугольник») без вывода средней точки. Как известно, именно трехфазная структура является наиболее эффективной при минимуме числа обмоток. При соединении обмоток «звездой» вентильный двигатель имеет большие постоянные момента и меньшие постоянные противо-ЭДС (при соотношении ?3) по сравнению с соединением «треугольником». Поэтому соединение «звездой» используется для управления осями, требующими больших моментов, а соединение «треугольником» — для больших скоростей.
В большинстве случаев обмотки статора выполняются без насыщения, т.е. противоЭДС обмоток имеет синусоидальную форму. Такие двигатели зачастую называют AC brushless motor в отличие от DC brushless motor, обмотки статора которого выполняются с насыщением. Такое насыщение в DC brushless motor предназначено для снижения пульсаций тока (и соответственно момента) при применении трапецеидальной коммутации. Но иногда термин DC brushless motor используют для двигателей с питанием через инвертор от сети постоянного тока, что не совсем корректно. Обычно количество пар полюсов, определяемое количеством пар магнитов ротора и определяющее соотношение механического и электрического оборотов, равно 4…8. Статор может быть выполнен с железным (iron core) или безжелезным (ironless) сердечником. Конструкция статора с безжелезным сердечником обеспечивает отсутствие силы притяжения магнитов ротора и железа статорной обмотки (magnetic attraction) и зубцового эффекта (cogging), но снижает незначительно (на 10.20%) эффективность двигателя изза меньших значений постоянной момента. Одно из самых очевидных преимуществ ротора с постоянными магнитами состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции ротора. Технологически магниты могут быть встроены в ротор или расположены на его поверхности. Но пониженный момент инерции зачастую приводит к малым значениям соотношения момента инерции двигателя и приведенного к его валу момента инерции нагрузки (mismatch ratio), усложняющему настройку привода. Поэтому ряд производителей предлагает наряду со стандартным и повышенный — в 2.
Обычно количество пар полюсов, определяемое количеством пар магнитов ротора и определяющее соотношение механического и электрического оборотов, равно 4…8. Статор может быть выполнен с железным (iron core) или безжелезным (ironless) сердечником. Конструкция статора с безжелезным сердечником обеспечивает отсутствие силы притяжения магнитов ротора и железа статорной обмотки (magnetic attraction) и зубцового эффекта (cogging), но снижает незначительно (на 10.20%) эффективность двигателя изза меньших значений постоянной момента. Одно из самых очевидных преимуществ ротора с постоянными магнитами состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции ротора. Технологически магниты могут быть встроены в ротор или расположены на его поверхности. Но пониженный момент инерции зачастую приводит к малым значениям соотношения момента инерции двигателя и приведенного к его валу момента инерции нагрузки (mismatch ratio), усложняющему настройку привода. Поэтому ряд производителей предлагает наряду со стандартным и повышенный — в 2. 4 раза — момент инерции ротора.Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
4 раза — момент инерции ротора.Современное устройство выступает как электродвигатель, действующий совместно с электронным преобразователем, который изготавливается по интегральной технологии с использованием микропроцессора. Он позволяет осуществить качественное управление двигателем с наилучшими показателями переработки энергии.
З.Принцип работы вентильного двигателя
Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Рисунок-3. Схема вентильного двигателя с транзисторным коммутатором
Со схемы видно, что в статоре ток образуется в обмотках, а в роторе создается при помощи высокоэнергетических постоянных магнитов.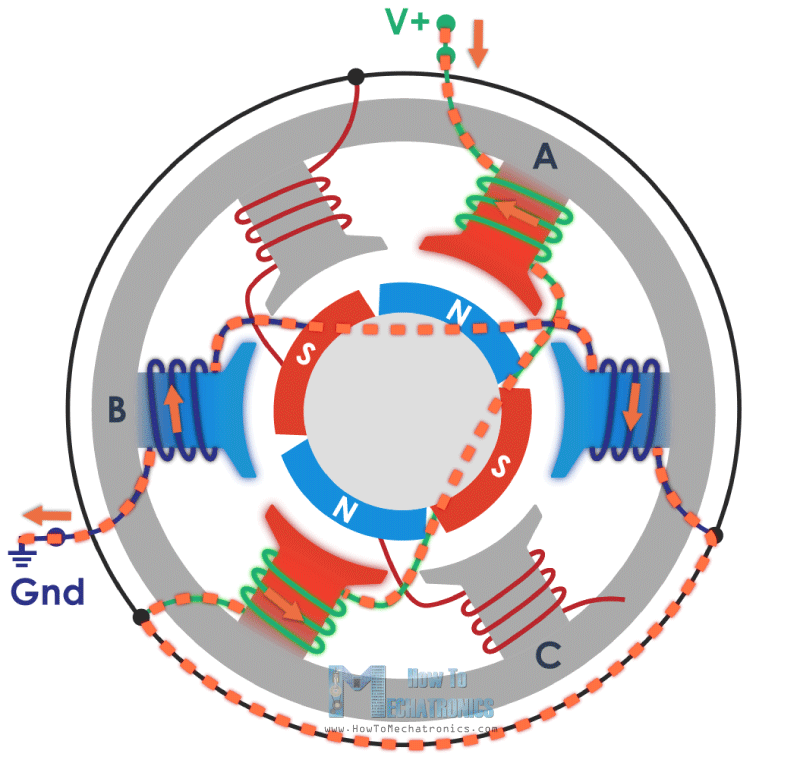 Условные обозначения:- VT1-VT7 — транзисторные коммуникаторы;- A, B, C — фазы обмоток;- M — момент двигателя;- DR — датчик положения ротора;- U -регулятор напряжения питания двигателя;- S (south), N (north) — направление магнита;- UZ — частотный преобразователь;- BR — датчик частоты вращения;- VD — стабилитрон;- L — катушка индуктивности.
Условные обозначения:- VT1-VT7 — транзисторные коммуникаторы;- A, B, C — фазы обмоток;- M — момент двигателя;- DR — датчик положения ротора;- U -регулятор напряжения питания двигателя;- S (south), N (north) — направление магнита;- UZ — частотный преобразователь;- BR — датчик частоты вращения;- VD — стабилитрон;- L — катушка индуктивности.
Схема двигателя показывает, что одним из основных преимуществ ротора, в котором установлены постоянные магниты, является уменьшение его диаметра и, как следствие, сокращение момента инерции. Такие приспособления могут быть встроенными в сам прибор или расположенными на его поверхности. Понижение этого показателя очень часто приводит к небольшим значениям баланса момента инерции самого двигателя и приведенного к его валу нагрузки, который и усложняет работу привода. По этой причине производители могут предложить стандартный и повышенный в 2-4 раза момент инерции. На сегодняшний день становится очень популярным вентильный двигатель, принцип работы которого основан на том, что контролер устройства начинает коммутировать обмотки статора. Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него. Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора. Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент.
Благодаря этому вектор магнитного поля остается всегда сдвинутым на угол, приближающийся к 900 (-900) относительно ротора. Контролер рассчитан на управление током, который движется через обмотки двигателя, в том числе и величиной магнитного поля статора. Следовательно, можно регулировать момент, который воздействует на прибор. Показатель угла между векторами может определить направление вращения, которое действует на него. Нужно учитывать, что речь идет об электрических градусах (они значительно меньше геометрических). Для примера приведем расчет вентильного двигателя с ротором, который в себе имеет 3 пары полюсов. Тогда оптимальным его углом будет 900 /3=300. Эти пары предусматривают 6 фаз обмоток коммутации, тогда получается, что вектор статора может перемещаться скачками по 600. Из этого видно, что настоящий угол между векторами обязательно будет варьироваться в пределах от 600 до 1200, начиная с вращения ротора. Вентильный двигатель, принцип работы которого основывается на обороте фаз коммутации, из-за которых поток возбуждения поддерживается относительно постоянным движением якоря, после их взаимодействия начинает формировать вращающийся момент. Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
Он устремляется повернуть ротор таким способом, чтобы все потоки возбуждения и якоря совпали воедино. Но во время его разворота датчик начинает переключать обмотки, и поток перемещается на следующий шаг. В этот момент результирующий вектор сдвинется, но останется полностью неподвижным сравнительно с потоком ротора, что в итоге и создаст вращающий момент вала.
4. Интегрированное исполнение вентильных двигателей
Одной из основных перспективных тенденций в развитии современных вентильных двигателей является тяготение производителя к интеграции в единый корпус с двигателем управляющей электроники. Такое решение позволяет предлагать не разрозненный набор комплектующих приводной системы, а законченный привод в сборе. Таким образом решаются возможные проблемы совместимости различных компонент привода, а также проблема различных интерфейсов компонент приводной системы.
Рис. 2 Векторный контроль тока вентильного двигателя
Примером интегрированного привода является серия двигателей BG, предлагаемая компанией Dunkermotoren (рис. 3).
3).
В рамках данной серии двигателей производитель предоставляет возможность заказать одну и ту же модель в различных исполнениях:
• без интегрированной управляющей электроники,
• с интегрированной коммутирующей электроникой (2-х проводная),
• с интегрированным контроллером скорости,
• с интегрированным контроллером движения,
• с интегрированным контроллером движения с сетевыми интерфейсами (CAN, PROFINET).
5. Преимущества использования вентильных двигателей
Вентильный двигатель обладает высокой динамикой, большой перегрузочной способностью и точным позиционированием. Благодаря тому что в нем отсутствуют движущие части, их использование возможно во взрывоопасной агрессивной среде. Такие моторы также называют и бесколлекторными, их основным преимуществом, по сравнению с коллекторными, является скорость, которая зависит от напряжения питания нагружающего момента. Также еще одним немаловажным свойством двигателя считается отсутствие истираемых и трущихся элементов, которые переключают контакты, благодаря чему вырастает ресурс пользования аппаратом.
Рис. 3 Двигатели Dunkermotoren серии BG
Статор 9 слоев, толщиной 0,2 мм покрытия Балансирующий ротор Вал диаметром 5 мм
I
Обмотки с максимальной эффективностью
Рисунок 4 — Разрез вентильного двигателя
Применяя вентильный двигатель в работе, можно отметить такие его достоинства:
— возможность применения широкого диапазона для модифицирования частоты вращения;
— высокая динамика и быстродействие;- максимальная точность позиционирования;
— небольшие затраты на техническое обслуживание;
— устройство можно отнести к взрывозащищенным объектам;
— имеет способность переносить большие перегрузки в момент вращения;
— высокий КПД, который составляет более 90%;
— имеются скользящие электронные контакты, которые существенно увеличивают рабочий ресурс и срок службы;
— при длительной работе нет перегрева электродвигателя.
Недостатки: Несмотря на огромное количество достоинств, вентильный двигатель также имеет и недостатки в эксплуатации:
— довольно сложное управление электродвигателем;
— относительно высокая цена устройства из-за применения в его конструкции ротора, который имеет дорогостоящие постоянные магниты.
Список литературы
1 Овечников В.В.,Фишельсон М.С.Городской транспорт.- М.:Высшая школа, 1976.-352 с.
2 Атаманов Ю.Е., Мазаник К.И. Теория подвижного состава. Трамвай.-Минск: БНТУ, 2008.-388с.
3 Максимов А.Н. Городской электротранспорт: Троллейбус,М.: — Изд.центр «Академия», 2004. — 256
с.
4 Маневровый тепловоз ТЭМ9Н Sinara Hybrid с гибридной силовой установкой.//Официальный сайт ОАО «Синара-Транспортные Машины». URL:
5 Звегинцов С. Электромобили: будущее уже здесь [электронный источник]. — Опубликовано 09.02.2017. — URL: https://www.Forbes.ru
6 Чиликин М.Г., Сандлер А.С.Общий курс электропривода. — М.: Энергоатомиздат, 1981. — 576 с.
7 Онищенко Г.Б. Электрический привод. Учебник для вузов-М.:РАСХН,2003. — 320с.: ил.-ISBN 5-85941-045-X.
8 Клевцев А.В. Преобразователи частоты для электропривода переменного тока. — М.: Изд. Граф и Ко, 2008. — 224 с.
9 Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. — М.: Академия, 2006. — 265 с.
— М.: Академия, 2006. — 265 с.
10 Тергемес К.Т., Сагитов П.И., Шадхин Ю.И., Акпанбетов Д.Б., Тергемесов Д.К. Устройство для плавного регулирования скорости электроподвижного состава. Инновационный патент РК №63764. -2010. — Бюл.№4. — 4 с.
11 Тергемес К.Т., Акпанбетов Д.Б., Тергемесов Д.К. Тяговый синхронный электропривод с питанием от контактной сети постоянного тока. Инновационный патент РК №62866. — 2010. — Бюл.№1. — 4 с.
12 Колбасинский Д.В. и др. Энергосбережение на городском транспорте.- М.±АР Lambert Academic Publishing.
13 Черных И.В. Моделирование электротехнических устройств в Matlab, SimPowerSystems и Simulink.-Санкт-Петербург.: Изд.Питер, 2008.-288 с.
14 Герман-Галкин С.Г. Силовая электроника. Лабораторные работы.-СПб.: Учитель и ученик, КОРОНА принт, 2002.-304 с.
шестифазный вентильно-индукторный двигатель с минимальными шумами, вибрациями и пульсациями момента, способ и устройство управления — патент РФ 2483416
Изобретение относится к области электротехники и может быть использовано в электроприводах различных механизмов и исполнительных устройствах автоматических систем. Техническим результатом является уменьшение шумов и вибраций и увеличение равномерности крутящего момента. В шестифазном вентильно-индукторном двигателе производные индуктивностей обмоток фаз по углу поворота ротора имеют синусоидальную форму, а высшие гармоники отсутствуют, за счет определенных соотношений угловых размеров полюсов ротора и статора, а полюса ротора имеют скосы в осевом направлении. Кроме того, полные токи обмоток фаз содержат в своем составе только нулевую и первую гармоники и не содержат высших гармоник. Это осуществляется за счет того, что каждый полюс статора оснащен двумя обмотками, через одну из которых протекает нулевая гармоника (постоянная составляющая), через другую обмотку протекает ток, имеющий синусоидальную форму. Амплитуда тока синусоидальной формы равна величине постоянного тока. Синусоидальные токи формируются при помощи трехфазного мостового инвертора, а постоянный ток формируется полумостовым инвертором. Используется релейно-токовый способ управления.
Техническим результатом является уменьшение шумов и вибраций и увеличение равномерности крутящего момента. В шестифазном вентильно-индукторном двигателе производные индуктивностей обмоток фаз по углу поворота ротора имеют синусоидальную форму, а высшие гармоники отсутствуют, за счет определенных соотношений угловых размеров полюсов ротора и статора, а полюса ротора имеют скосы в осевом направлении. Кроме того, полные токи обмоток фаз содержат в своем составе только нулевую и первую гармоники и не содержат высших гармоник. Это осуществляется за счет того, что каждый полюс статора оснащен двумя обмотками, через одну из которых протекает нулевая гармоника (постоянная составляющая), через другую обмотку протекает ток, имеющий синусоидальную форму. Амплитуда тока синусоидальной формы равна величине постоянного тока. Синусоидальные токи формируются при помощи трехфазного мостового инвертора, а постоянный ток формируется полумостовым инвертором. Используется релейно-токовый способ управления. 5 ил.
5 ил.
Формула изобретения
Шестифазный вентильно-индукторный двигатель, содержащий явнополюсный статор с 12 сосредоточенными обмотками и ротор с 10 прямыми полюсами без обмоток и без магнитов, управляемый при помощи системы, коммутирующей напряжение фаз, содержащей схему управления, силовой инвертор и датчик положения ротора, отличающийся тем, что двигатель оснащен ротором со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного полумостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления.
Описание изобретения к патенту
Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известны многофазные вентильно-индукторные двигатели с прямыми полюсами ротора и статора и сосредоточенными обмотками, расположенными на полюсах статора [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. — М., Издательство МЭИ, 2003, с.62]. В таких двигателях Z2=Z1±2, где Z2 — число полюсов ротора; Z1 — число полюсов статора, поэтому ротор вентильно-индукторного двигателя вращается с частотой меньшей, чем частота первой гармоники токов фаз , где — частота вращения ротора; — частота первой гармоники токов фаз.
Основными недостатками этих двигателей являются повышенный уровень шумов, вибраций и высокие пульсации момента [Шабаев В.А. Анализ источников шума вентильно-индукторного двигателя // Электротехника. 2005, № 5, с.62].
2005, № 5, с.62].
Вторым недостатком вентильно-индукторных двигателей является то, что при коммутации фаз токи фаз протекают только в одном направлении, поэтому для коммутации каждой фазы необходимо применение полумостовых схем [Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. — М., Издательство МЭИ, 2003, с.10, 15, 17]. Применение полумостовых схем для коммутации фаз увеличивает суммарную установочную мощность и цену полупроводниковых приборов инвертора [Питание машин с регулируемой реактивностью. G. Glaize. H. Foch. L’alimentation des machines a’reluctance variable. Machines a’Reluctance Variable, 30 septembre 1985, Франция.]. Токи фаз вентильно-индукторного двигателя, протекающие только в одном направлении, являются в общем случае несинусоидальными и при разложении в ряд Фурье имеют в своем составе нулевую, первую и высшие гармоники. Нулевая гармоника токов фаз по своей сути является током возбуждения.
Известны синхронно-реактивные двигатели с акисиальным возбуждением (A. M.Григорович, Б.А.Метелкин, Я.Б.Тубис и В.А.Шабаев. Авторское свидетельство СССР № 1737644 А1, Электрическая машина, кл. H02K 19/20, 1980).
M.Григорович, Б.А.Метелкин, Я.Б.Тубис и В.А.Шабаев. Авторское свидетельство СССР № 1737644 А1, Электрическая машина, кл. H02K 19/20, 1980).
Основными недостатками этого технического решения является высокая мощность, потребляемая обмотками возбуждения, обуславливаемая тем, что магнитные потоки возбуждения замыкаются через два зазора и через магнитопровод статора и ротора в поперечном направлении (против шихтовки), то есть магнитное сопротивление потокам возбуждения достаточно велико. Это вызывает необходимость увеличения напряженности магнитного поля за счет увеличения числа витков и тока обмоток возбуждения, что в свою очередь приводит к дополнительному нагреву и увеличению массы и размеров двигателя. Кроме того, эта конструкция сложна и нетехнологична.
Наиболее близким к предлагаемому изобретению является низкооборотный высокомоментный вентильный индукторный реактивный двигатель для автоматизированных электроприводов, содержащий статор с числом полюсов, кратным шести, и ротор с числом полюсов, меньшим числа полюсов статора на величину этой кратности (например, и так далее, где Z1 — число полюсов статора; Z2 — число полюсов ротора), фазные обмотки которого соединены в треугольник, питающийся от трехфазного мостового инвертора через включенные в каждую обмотку по одному диоду и управляемый трехфазным прямоугольным линейным напряжением различной полярности, причем периоды прямоугольных линейных напряжений составляют 120 электрических градусов, периоды, когда напряжения равны нулю, составляют 60 электрических градусов и при трехфазным прямоугольном линейном напряжении различной полярности сдвинуты относительно друг друга на 120 электрических градусов [Плах Г. К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильно-индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября 2007].
К., Лозитский О.Е., Луговец В.А., Протасов Д.А., Мустафаев P.P. Низкооборотный высокомоментный вентильно-индукторный реактивный двигатель для автоматизированных электроприводов. / Пятая международная (четырнадцатая всероссийская) конференция по автоматизированному электроприводу. АЭП-2007, Санкт-Петербург, 18-21 сентября 2007].
Недостатками этого технического решения являются большая неравномерность момента (в описании прототипа пульсации момента составляют 16%) и наличие в схеме управления замкнутого контура, состоящего из двух последовательно включенных диодов и двух обмоток фаз полюсов, сдвинутых на 180 электрических градусов, вследствие чего электродвижущая сила этих обмоток при уменьшении тока уравновешивается омическим сопротивлением обмоток и падением напряжения на диодах в прямом направлении, что обуславливает низкую скорость уменьшения тока при коммутации фаз и наличие наряду с двигательными тормозных моментов, которые уменьшают вращающий момент двигателя, увеличивают энергетические потери, что особенно сильно сказывается при высоких частотах вращения. Кроме того, форма тока каждой фазы близка к форме тока, называемой «детектированной синусоидой», ток такой формы при разложении в ряд Фурье наряду с нулевой гармоникой содержит много высших гармоник, что вызывает шумы и вибрации.
Кроме того, форма тока каждой фазы близка к форме тока, называемой «детектированной синусоидой», ток такой формы при разложении в ряд Фурье наряду с нулевой гармоникой содержит много высших гармоник, что вызывает шумы и вибрации.
Целями предлагаемого изобретения является уменьшение уровня шумов и вибраций и пульсаций момента.
Поставленные цели достигаются тем, что в известных шестифазных синхронно-реактивных двигателях, содержащих явнополюсные симметричные статор и ротор с Z2=(Z1±2)p, где p — число пар полюсов статора, p=2,4,8 , каждый полюс статора оснащен двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, причем фазные обмотки фазы А соединены последовательно с фазными обмотками фазы D, фазные обмотки фазы В соединены последовательно с фазными обмотками фазы Е, фазные обмотки фазы С соединены последовательно с фазными обмотками фазы F, эти попарно соединенные обмотки соединены в «звезду» и с выходами трехфазного мостового инвертора, а обмотки возбуждения каждого из полюсов соединены последовательно и подключены к выходам однофазного полумостового инвертора, при этом фазные обмотки питаются токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, а обмотки возбуждения питаются постоянным током, причем величина постоянного тока равна амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи релейно-токового способа управления, и симметричный явнополюсный ротор со скошенными полюсами, причем угловая ширина полюса ротора для вентильно-индукторного двигателя с Z1=12 и Z2=10 равна угловой ширине межполюсного расстояния ротора и равна 18°, а угол скоса ротора по оси равен 6°, угловая ширина полюса статора равна 12°, угловая ширина межполюсного расстояния статора равна 18°.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое устройство имеет следующие новые признаки:
— каждый полюс статора оснащен двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, причем фазные обмотки фазы А соединены последовательно с фазными обмотками фазы D, фазные обмотки фазы В соединены последовательно с фазными обмотками фазы Е, фазные обмотки фазы С соединены последовательно с фазными обмотками фазы F;
— эти попарно соединенные обмотки соединены в «звезду» и с выходами трехфазного мостового инвертора, а обмотки возбуждения каждого из полюсов соединены последовательно и подключены к выходам однофазного мостового инвертора, при этом фазные обмотки питаются токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, а обмотки возбуждения питаются постоянным током;
— величина постоянного тока равна амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления;
— двигатель содержит явнополюсный ротор со скошенными полюсами, причем угловая ширина полюса ротора для вентильно-индукторного двигателя с Z1=12 и Z2=10 равна угловой ширине межполюсного расстояния ротора и равна 18°, а угол скоса по оси ротора равен 6°, угловая ширина полюса статора равна 12°, угловая ширина межполюсного расстояния статора равна 18°.
Следовательно, заявленное техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшаются шумы и вибрации вентильно-индукторного двигателя и уменьшаются пульсации момента за счет отсутствия высших гармоник токов основных обмоток и обмоток возбуждения и за счет уменьшения числа и амплитуды высших гармоник производных индуктивностей фаз по углу поворота ротора.
Следовательно, заявленное техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, электропривода и электродвигателей.
Шестифазных вентильно-индукторных двигателей с 12 полюсами статора и 10 полюсами ротора, содержащих явнополюсный ротор со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора, и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного полумостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи релейно-токового способа управления, в известных технических решениях не обнаружено.
Таким образом, указанные признаки обеспечивают заявленному техническому решению соответствие требованию «существенные отличия»
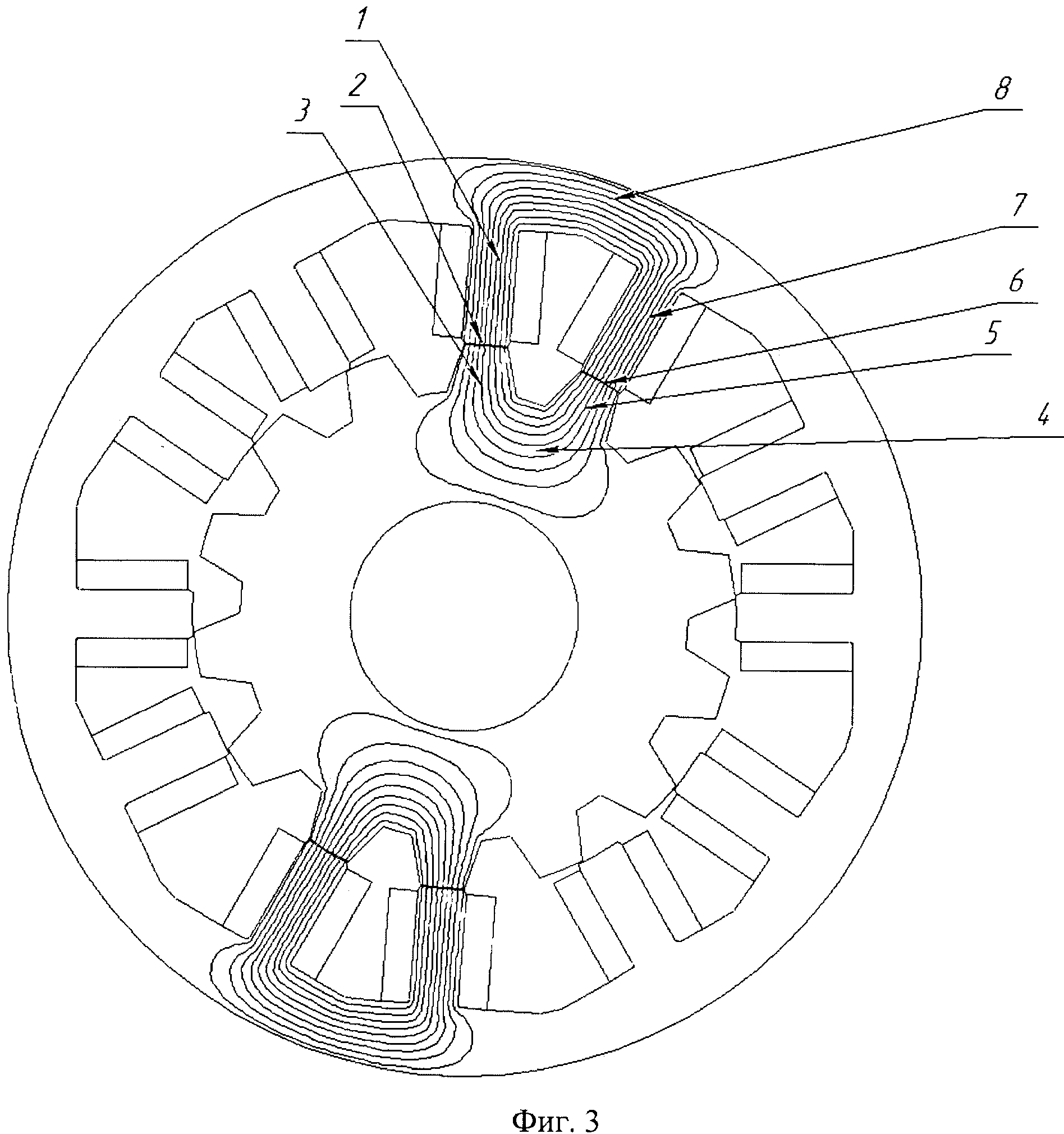
Сущность предполагаемого изобретения поясняется чертежами. На фиг.1 приведен шестифазный вентильно-индукторный двигатель с минимальными шумами, вибрациями и пульсациями момента, с 12 полюсами статора и 10 полюсами ротора, содержащего явнополюсный ротор со скошенными полюсами и обмотками возбуждения на полюсах статора. На фиг.1 обозначено: 1 — статор; 2 — обмотка возбуждения; 3 — фазная обмотка; 4 — ротор; 5 — вал; A-F — полюса статора, оснащенные обмотками соответствующих фаз; 1-12 — номера полюсов статора; 1-10 — номера полюсов ротора.
На фиг.2 приведены развертки поверхностей полюсов ротора и статора шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента, с 10 полюсами ротора и 12 полюсами статора, содержащего явнополюсный ротор со скошенными полюсами в положении ротора относительно статора, соответствующем фиг. 1. На фиг.2 обозначено: I — развертки поверхностей полюсов ротора; II — развертки поверхностей полюсов статора; A-F — полюса статора, оснащенные обмотками соответствующих фаз; 1-12 — номера полюсов статора; 1-10 — номера полюсов ротора.
1. На фиг.2 обозначено: I — развертки поверхностей полюсов ротора; II — развертки поверхностей полюсов статора; A-F — полюса статора, оснащенные обмотками соответствующих фаз; 1-12 — номера полюсов статора; 1-10 — номера полюсов ротора.
На фиг.3 приведены схемы фазных обмоток и обмоток возбуждения шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента, с 10 полюсами ротора и 12 полюсами статора. На фиг.3 обозначено: I — схема обмоток возбуждения; II — схема фазных обмоток; 1-12 — номера полюсов статора в соответствии с фиг.1; Нов — начало обмотки возбуждения; Ков — конец обмотки возбуждения; А, В, С — обмотки полюсов статора, в которых протекает трехфазный переменный ток; -А, -В, -С — обмотки полюсов статора, в которых протекает трехфазный переменный ток, сдвинутый относительно обмоток А, В, С на 180 электрических градусов за счет противоположного включения начал и концов этих обмоток.
На фиг. 4 приведены диаграммы работы шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента с 12 полюсами статора и 10 полюсами ротора, содержащего явнополюсный ротор со скошенными полюсами, рассчитанные в относительных единицах с помощью программы MathCad. На фиг.4 обозначено: t:=0 360 — угол поворота ротора относительно статора в электрических градусах; — производная индуктивности фазы А по углу поворота ротора, имеющая синусоидальную форму за счет конфигурации полюсов ротора и статора, показанных на фиг.1 и 2; — суммарный ток фазной обмотки и обмотки возбуждения полюсов фазы A; 0,5(IA(t))2 — половина квадрата суммы токов фазной обмотки и обмотки возбуждения фазы A; MA(t):=dLA(t)0,5(IA(t)) 2 — крутящий момент на валу двигателя, создаваемый фазой А; МА+МС+МЕ — суммарный вращающий момент на валу двигателя, создаваемый фазами А, С, Е; MB+MD+MF — суммарный вращающий момент на валу двигателя, создаваемый фазами В, D, F; MA+MC+ME+MB+MD+MF — суммарный вращающий момент на валу двигателя, создаваемый всеми шестью фазами.
4 приведены диаграммы работы шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента с 12 полюсами статора и 10 полюсами ротора, содержащего явнополюсный ротор со скошенными полюсами, рассчитанные в относительных единицах с помощью программы MathCad. На фиг.4 обозначено: t:=0 360 — угол поворота ротора относительно статора в электрических градусах; — производная индуктивности фазы А по углу поворота ротора, имеющая синусоидальную форму за счет конфигурации полюсов ротора и статора, показанных на фиг.1 и 2; — суммарный ток фазной обмотки и обмотки возбуждения полюсов фазы A; 0,5(IA(t))2 — половина квадрата суммы токов фазной обмотки и обмотки возбуждения фазы A; MA(t):=dLA(t)0,5(IA(t)) 2 — крутящий момент на валу двигателя, создаваемый фазой А; МА+МС+МЕ — суммарный вращающий момент на валу двигателя, создаваемый фазами А, С, Е; MB+MD+MF — суммарный вращающий момент на валу двигателя, создаваемый фазами В, D, F; MA+MC+ME+MB+MD+MF — суммарный вращающий момент на валу двигателя, создаваемый всеми шестью фазами.
На фиг.5 приведена структурная схема регулятора момента шестифазного вентильно-индукторного двигателя с минимальными шумами, вибрациями и пульсациями момента. На фиг.5 обозначено: R — резистор, задающий амплитуду и направление вращения вектора заданного тока; +U, -U — напряжения питания резистора, задающего амплитуду и направление вращения вектора заданного тока; I з — заданный вектор тока; БИП — блок изменения полярности; -1 — коэффициент передачи блока изменения полярности; ПА, ПВ, ПС — переключатели полярностей тока задания соответствующих фаз; ЦАПА, ЦАПВ, ЦАПС — цифроаналоговые преобразователи соответствующих фаз; ПЗУА, ПЗУВ, ПЗУС — постоянные запоминающие устройства соответствующих фаз; ДП — датчик положения ротора вентильно-индукторного двигателя; БСА, БСВ, БСС — блоки сравнения текущих значений заданных токов и токов обмоток соответствующих фаз; iA, iB , iC — текущие значения токов обмоток соответствующих фаз; K1-K8 — компараторы с гистерезисом; Б1, Б2, Б3 — блоки с коэффициентом передачи, равным -1, изменяющие полярность выходного напряжения компараторов K2, K4, K6; VT1-VT8 — силовые транзисторы; VD1- VD8 — силовые диоды; ДТ1-ДТ4 — датчики тока; Е -источник постоянного напряжения; С — конденсатор источника постоянного напряжения; LA-LF — индуктивности соответствующих фаз; Lов — индуктивность обмотки возбуждения; БСОВ — блок сравнения текущих значений заданного тока и тока обмотки возбуждения; iов — текущее значение тока обмотки возбуждения; БВМ — блок выделения модуля (линейный выпрямитель).
Регулятор момента шестифазного вентильно-индукторного двигателя с обмоткой возбуждения работает следующим образом. Резистором R задается амплитуда и полярность вектора тока Iз, БИП изменяет полярность Iз на противоположную. Сигналы различной полярности, пропорциональные Iз, подаются на входы переключателей соответствующих фаз ПА, ПВ, ПС, на управляющие входы которых подаются сигналы с выходов постоянных запоминающих устройств соответствующих фаз ПЗУА, ПЗУВ, ПЗУС, соединенных с датчиком положения ротора. Сигналы с ПА, ПВ, ПС и ПЗУА, ПЗУВ, ПЗУС подаются на входы цифроаналоговых преобразователей соответствующих фаз ЦАПА, ЦАПВ, ЦАПС, на выходах которых формируется трехфазное синусоидальное напряжение, амплитуда которого пропорциональна Iз, частота — частоте вращения ротора, а при изменении полярности Iз при помощи резистора R происходит сдвиг токов фаз на 180 электрических градусов. Заданные токи фаз сравниваются при помощи блоков сравнения текущих значений заданных токов и токов обмоток соответствующих фаз БСА, БСВ, БСС, причем сигналы, пропорциональные токам фаз, поступают с трех датчиков токов ДТ1-ДТ3, а сигналы, пропорциональные заданным токам фаз, поступают с выходов трех цифроаналоговых преобразователей ЦАПА, ЦАПВ, ЦАПС, а их разность поступает на входы компараторов с гистерезисом K1-K6, которые совместно с блоками, имеющими коэффициент передачи, равный -1, — Б1, Б2, Б3 и трехфазным инвертором, выполненным на транзисторах VT1-VT6 и на диодах VD1-VD6, формируют трехфазные токи, средняя величина которых имеет синусоидальную форму и амплитуду, пропорциональную Iз. Заданное резистором R напряжение, пропорциональное Iз, подается на вход блока выделения модуля БВМ, с выхода которого напряжение, имеющее только положительную полярность, подается на входы блока сравнения текущих значений заданного тока и тока обмотки возбуждения БСОВ, на второй вход которого подается напряжение, пропорциональное току в обмотке возбуждения, с выхода датчика тока. С выхода БСОВ сигнал подается на компараторы K7 и K8, которые управляют полумостовым инвертором на транзисторах VT7 и VT8 и на диодах VD7 и VD8 и формируют постоянный ток в обмотке возбуждения, средняя величина которого пропорциональна Iз. Благодаря конфигурации вентильно-индукторного двигателя, показанной на фиг.1, и схеме включения обмоток, показанной на фиг.3, среднее значение полных токов обмоток каждого полюса равно сумме токов фазной обмотки и обмотки возбуждения i n=Imax{1+sin[ +(n-1)60°]}, где in — среднее значение полных токов обмоток n-го полюса статора; Imax — максимальное значение токов фазных обмоток; — угловое положение ротора в электрических градусах; n=1 12 — номер полюса статора.
Заданное резистором R напряжение, пропорциональное Iз, подается на вход блока выделения модуля БВМ, с выхода которого напряжение, имеющее только положительную полярность, подается на входы блока сравнения текущих значений заданного тока и тока обмотки возбуждения БСОВ, на второй вход которого подается напряжение, пропорциональное току в обмотке возбуждения, с выхода датчика тока. С выхода БСОВ сигнал подается на компараторы K7 и K8, которые управляют полумостовым инвертором на транзисторах VT7 и VT8 и на диодах VD7 и VD8 и формируют постоянный ток в обмотке возбуждения, средняя величина которого пропорциональна Iз. Благодаря конфигурации вентильно-индукторного двигателя, показанной на фиг.1, и схеме включения обмоток, показанной на фиг.3, среднее значение полных токов обмоток каждого полюса равно сумме токов фазной обмотки и обмотки возбуждения i n=Imax{1+sin[ +(n-1)60°]}, где in — среднее значение полных токов обмоток n-го полюса статора; Imax — максимальное значение токов фазных обмоток; — угловое положение ротора в электрических градусах; n=1 12 — номер полюса статора. При этом крутящий момент, развиваемый полюсами 1 и 7, равен , где IA max — максимальное значение тока фазы А. Для того чтобы , необходимо применение конструкции полюсов ротора и статора, поверхности полюсов которых показаны на фиг.2. При этом . Результаты расчета вращающего момента от фазы А, проведенные при помощи прикладной программы MathCad для линейной модели предлагаемого двигателя, в относительных единицах (то есть при IA max=1 и показаны на фиг.4. Так как фазные токи и изменение индуктивностей обмоток фаз по углу поворота ротора, смежных полюсов сдвинуты на угол, равный 60 электрических градусов, то и вращающие моменты фаз смежных полюсов сдвинуты на угол, равный 60 электрических градусов, а суммарный момент от всех фаз постоянный, не зависит от углового положения ротора, как показано на фиг.4.
При этом крутящий момент, развиваемый полюсами 1 и 7, равен , где IA max — максимальное значение тока фазы А. Для того чтобы , необходимо применение конструкции полюсов ротора и статора, поверхности полюсов которых показаны на фиг.2. При этом . Результаты расчета вращающего момента от фазы А, проведенные при помощи прикладной программы MathCad для линейной модели предлагаемого двигателя, в относительных единицах (то есть при IA max=1 и показаны на фиг.4. Так как фазные токи и изменение индуктивностей обмоток фаз по углу поворота ротора, смежных полюсов сдвинуты на угол, равный 60 электрических градусов, то и вращающие моменты фаз смежных полюсов сдвинуты на угол, равный 60 электрических градусов, а суммарный момент от всех фаз постоянный, не зависит от углового положения ротора, как показано на фиг.4.
Таким образом, использование в электроприводах различных механизмов и исполнительных устройствах автоматических систем шестифазных вентильно-индукторных двигателей с 12 полюсами статора и 10 полюсами ротора, содержащих явнополюсный ротор со скошенными полюсами, с угловой шириной полюса ротора, равной угловой ширине межполюсного расстояния ротора и равной 18°, с углом скоса полюса ротора по оси, равным 6°, угловой шириной полюса статора, равной 12°, угловой шириной межполюсного расстояния статора, равной 18°, с каждым полюсом статора, оснащенным двумя сосредоточенными обмотками, одна из которых является фазной обмоткой, а другая играет роль обмотки возбуждения, с фазными обмотками фазы А, соединенными последовательно с фазными обмотками фазы D, фазными обмотками фазы В, соединенными последовательно с фазными обмотками фазы Е, фазными обмотками фазы С, соединенными последовательно с фазными обмотками фазы F, с тремя концами этих попарно последовательно соединенных обмоток, соединенными в «звезду», и с остальными тремя концами, соединенными с выходами трехфазного мостового инвертора и питающимися токами синусоидальной формы, сдвинутыми относительно друг друга на угол 60 электрических градусов, с обмотками возбуждения каждого из полюсов, соединенными последовательно, подключенными к выходам однофазного мостового инвертора, питающимися постоянным током, с величиной, равной амплитуде трехфазных токов, которые формируются за счет датчиков токов фаз, датчика тока обмоток возбуждения, датчика положения тока ротора при помощи токового способа управления, позволяет уменьшить пульсации момента, приводящие к пульсациям скорости при малых скоростях, и уменьшает уровень шумов и вибраций.
Использование предлагаемого технического решения в электроприводах различных механизмов и исполнительных устройствах обеспечит повышение эффективности и качества работы этих устройств.
Все о реактивных двигателях — что это такое и как они работают
Электродвигатели создают механическое движение, используя электромагнетизм и основные электрические принципы, и сегодня они составляют подавляющее большинство коммерческих двигателей. Существует так много различных типов электродвигателей, что может быть трудно определить, какой из них подходит для вашего применения.
Эта статья призвана помочь читателям понять устройство электродвигателя путем изучения его конструкции и работы; Эти машины могут быть разделены на двигатели постоянного и переменного тока в зависимости от источника питания и могут быть дополнительно классифицированы в зависимости от их метода выработки механической энергии. В этой статье основное внимание будет уделено конкретному классу двигателей, известному как реактивные двигатели, которые могут относиться к любой из этих категорий в зависимости от конструкции.
Что такое реактивные двигатели?
Хотя реактивные двигатели были изобретены в начале 19 века, они только недавно получили распространение благодаря микроэлектронике и передовым системам управления.
Реактивный двигатель — это усовершенствованный тип двигателя, в котором используются как статоры, так и роторы, как и в большинстве электрических двигателей. Некоторые реактивные двигатели работают с точными оборотами, синхронизируя скорость ротора с вращающимся магнитным полем (RMF) статора, что делает их «синхронными» по конструкции (более подробную информацию об этом можно найти в нашей статье о синхронных двигателях). Их называют реактивными двигателями, потому что они поляризуют величину сопротивления — магнитного эквивалента электрического сопротивления — в полюсах своего ротора для взаимодействия с RMF статора.
Как работают реактивные двигатели?
Двумя основными компонентами реактивного двигателя являются внешний неподвижный статор и внутренний ротор, разделенные небольшим воздушным зазором. В зависимости от типа реактивного двигателя конструкция этих двух частей меняется, но основные принципы работы остаются прежними.
Статор состоит из выступающих «выступающих» пар полюсов, образованных протеканием тока по проводу, намотанному на эти выступы. Ротор изготовлен из ферромагнитного металла и содержит собственные полюса, повторяющие контуры магнитного поля статора (либо с выступами, либо с воздушными зазорами/выемками). Когда выступающий полюс ротора совпадает с выступающим полюсом статора, говорят, что ротор находится в положении минимального магнитного сопротивления, то есть величина магнитного «сопротивления» в этой точке наименьшая и «полностью выровнена».
Существуют определенные показатели, общие для всех реактивных двигателей, и в этой статье мы кратко объясним каждый из них, чтобы помочь понять различия между типами реактивных двигателей. Они ни в коем случае не являются исчерпывающими и содержат только основные характеристики реактивных двигателей.
Тип фазы
Реактивные двигатели могут приводиться в действие однофазным или многофазным двигателем. Наиболее распространенными многофазными конструкциями являются трехфазные двигатели, которые зарезервированы для приложений с более высоким крутящим моментом, поскольку они не требуют вспомогательных обмоток и могут обеспечивать больший ток для двигателя. Для однофазных двигателей требуются пускатели, и дополнительную информацию можно найти в нашей статье о пускателях двигателей.
Соотношение полюсов статора и ротора
Существуют идеальные соотношения полюсов статора и ротора в зависимости от типа двигателя/желаемых выходных характеристик. Реактивные двигатели обычно имеют соотношение полюсов 6/4, 4/2, 8/6 или 12/8, хотя существуют и другие соотношения. Соотношение 1/1 лучше всего подходит для синхронных реактивных двигателей, поскольку оно обеспечивает более точную синхронизацию.
Номинальная мощность/крутящий момент
Номинальный выходной крутящий момент [с единицами ньютон-метров (Нм) или фунт-сила — футы (lbf-ft)] и мощность [с единицами измерения киловатты (кВт) или лошадиные силы (л. с.)] отображает количество выходной мощности и крутящий момент, обеспечиваемый двигателем в установившемся режиме. Номинальная мощность может варьироваться от долей лошадиных сил до сотен лошадиных сил, что показывает, насколько универсальными могут быть эти двигатели.
с.)] отображает количество выходной мощности и крутящий момент, обеспечиваемый двигателем в установившемся режиме. Номинальная мощность может варьироваться от долей лошадиных сил до сотен лошадиных сил, что показывает, насколько универсальными могут быть эти двигатели.
Пульсации крутящего момента и диапазон скоростей постоянного крутящего момента
Поскольку есть точки, в которых реактивный крутящий момент не создается (полностью выровненные положения), при вращении вала возникает периодическое изменение крутящего момента. Это может вызвать эффект «пульсации крутящего момента», когда вал испытывает крутящий момент только в этих положениях с высоким сопротивлением. Эта пульсация крутящего момента может вызвать шум и нежелательные колебания в машине. Поэтому существуют диапазоны постоянного крутящего момента для реактивных двигателей, в которых эта пульсация крутящего момента минимальна, обычно оценивается как диапазон оборотов в минуту.
Типы реактивных двигателей
Есть две основные конструкции, в которых используется реактивный двигатель: синхронный реактивный двигатель и вентильный реактивный двигатель. Каждая из этих конструкций достаточно различна, чтобы требовать отдельных объяснений, и в этом разделе будет кратко описан каждый подтип реактивного двигателя.
Каждая из этих конструкций достаточно различна, чтобы требовать отдельных объяснений, и в этом разделе будет кратко описан каждый подтип реактивного двигателя.
Синхронные реактивные двигатели
Синхронные реактивные двигатели предназначены для работы с точными «синхронными» скоростями. Они достигают этого за счет использования трехфазной обмотки статора (создающей истинное RMF) и ротора, в котором реализованы явно выраженные полюса ротора и внутренние барьеры магнитного потока (обычно пазы или воздушные зазоры внутри ротора, см. Рисунок 1). В роторе часто используется модифицированная короткозамкнутая клетка вокруг этих выступающих полюсов, так что он может извлечь выгоду из эффекта индукции и стать самозапускающимся (дополнительную информацию об этой концепции можно найти в нашей статье о двигателях с короткозамкнутым ротором). Когда двигатель запускается, он приближается к синхронной скорости за счет индукции, а затем фиксируется в синхронизме за счет реактивного момента, создаваемого магнитными барьерами ротора.
Рис. 1: Типовые конструкции синхронных реактивных двигателей. Обратите внимание на участки с низким сопротивлением (полюса) и высоким сопротивлением (воздушные зазоры/выемки)
Изображение предоставлено: http://www.faculty.umassd.edu/xtras/catls/resources/binarydoc/3624.ppt
Импульсные реактивные двигатели
Импульсные реактивные двигатели относятся к типу шаговых двигателей, но они уникальны тем, что имеют перевернутую обмотку, где обмотки возбуждения находятся в статоре, а не в роторе (см. рис. 2). Ротор представляет собой ферромагнитный сердечник с постоянными полюсами и выемками, на которые действуют электромагнитные полюса статора. Хотя это упрощает физическую конструкцию, это усложняет электрическую настройку, поскольку электронная система управления должна включать и выключать полюса статора, чтобы «приводить» полюса ротора в каждое новое положение, вызывая вращение. Реактивный реактивный двигатель может использовать электронный датчик положения, который вычисляет угол между полюсами ротора и обмотками статора, а также синхронизирующий механизм для синхронизации полюсов статора с частотой вращения. В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
В этих двигателях используются достижения в области полупроводников и микроэлектроники 21 века, и они до сих пор оптимизированы для самых разных применений.
Рис. 2: Типовая конструкция вентильного реактивного двигателя. Обратите внимание на неравное соотношение полюсов ротора и статора и катушки, окружающие выступающие полюса статора.
Изображение предоставлено: https://en.wikipedia.org
Применение и критерии выбора
В зависимости от типа реактивного двигателя их применение может различаться; тем не менее, эти двигатели нашли несколько общих применений, которые отличают их от других электродвигателей, и они быстро опережают своих старых собратьев.
Их первым большим преимуществом является простая конструкция — в них не используются контактные кольца, обмотки возбуждения ротора, постоянные магниты, коммутаторы или щетки. Эта простота повышает их эффективность, надежность, производственные затраты, затраты на техническое обслуживание и делает их элегантным вариантом для дизайнеров.
Они обеспечивают очень высокую удельную мощность при небольшом размере; Фактически, реактивные двигатели могут обеспечить пусковой момент в 2-4 раза больший, чем у традиционных асинхронных машин того же размера, что позволяет им быть на 1-2 рамы меньше при той же выходной мощности. Их можно использовать в ситуациях, требующих от 0 до сотен тысяч оборотов в минуту, при условии, что они ограничены только входным током и их подшипниками.
Эти преимущества являются палкой о двух концах, поскольку простая конструкция сочетается со сложной электрической схемой и системами управления. Реактивные двигатели по своей природе привязаны к своей электронике, поэтому эти схемы необходимо покупать вместе с этими двигателями и устанавливать, что может увеличить затраты. Их отношение тока к крутящему моменту чрезвычайно нелинейно и должно решаться с помощью конструкции их системы управления. Переключение явно выраженных полюсов в вентильных реактивных двигателях должно быть точным, иначе двигатель не будет работать. Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
Фазный ток необходимо тщательно контролировать, чтобы свести к минимуму пульсации крутящего момента. Они также вносят акустический и электрический шум в любую систему, частью которой они являются, что не идеально для некоторых приложений.
В настоящее время эти двигатели наиболее эффективны на высоких скоростях и нашли широкое применение в стиральных машинах, аналоговых электросчетчиках, приводах управляющих стержней для ядерных реакторов, двигателях с жесткими дисками, электромобилях, приводах стеклоочистителей, записывающем оборудовании и многом другом. более. Они все еще оптимизируются сегодня и могут однажды заменить асинхронный двигатель в качестве отраслевого стандарта благодаря своим благоприятным характеристикам.
Резюме
В этой статье представлено понимание того, что такое реактивные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу поиска поставщиков Thomas, чтобы найти потенциальные источники поставок или просмотреть сведения о конкретных продуктах.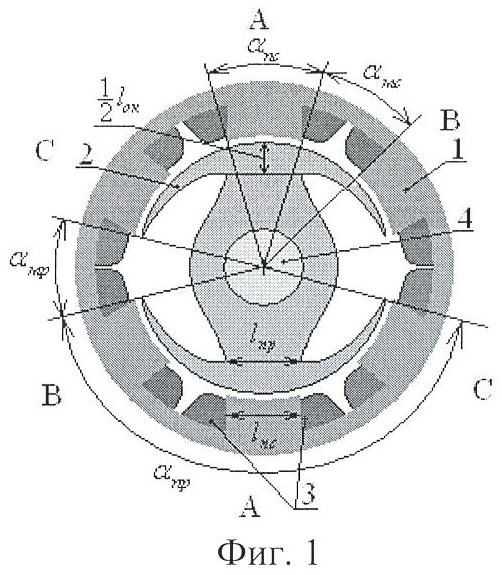
Источники:
- https://rmd.ac.in/dept/eee/notes/7/SEM/unit1.pdf
- http://lipo.ece.wisc.edu
- http://www.refreedrive.eu
- https://people.ucalgary.ca
- http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.662.959&rep=rep1&type=pdf
- http://people.ece.umn.edu/users/riaz/animations/switchrel.html
Другие товары для двигателей
- Все о бесщеточных двигателях постоянного тока — что это такое и как они работают
- Все о двигателях с постоянными магнитами — что это такое и как они работают
- Все о двигателях постоянного тока с обмоткой серии — что это такое и как они работают
- Все о шунтирующих двигателях постоянного тока — что это такое и как они работают
- Все о шаговых двигателях — что это такое и как они работают Шаговые двигатели
- и серводвигатели — в чем разница?
- Все о контроллерах двигателей переменного тока — что это такое и как они работают
- Синхронные двигатели и асинхронные двигатели — в чем разница? Бесщеточные двигатели
- и щеточные двигатели — в чем разница?
- Кто изобрел паровой двигатель? Урок промышленной истории
- Все о двигателях с электронным управлением — что это такое и как они работают Двигатели постоянного тока
- и серводвигатели — в чем разница? Шаговые двигатели
- и двигатели постоянного тока — в чем разница?
- Все о контроллерах серводвигателей — что это такое и как они работают
- Что такое трехфазный двигатель и как он работает?
- ECM Motors и PSC Motors — в чем разница?
- Все о устройствах плавного пуска двигателей: что это такое и как они работают
- Все о контроллерах двигателей постоянного тока — что это такое и как они работают
- Основы тестирования двигателя (и ротора)
- Что такое штамповка двигателя и как это работает?
- Все о двигателях с дробной мощностью
Больше из Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Машины, инструменты и расходные материалы
Новый крутой взгляд на вентильный реактивный двигатель
Опубликовано 9 июня 2022 г.
Автор:
Эйлин Вагнер
Инженер-исследователь
С начала пандемии резко возрос интерес к обустройству дома, а также спрос на необходимые инструменты. Пилы, дрели, шлифовальные машины и фрезеры — какой тип двигателя они используют? В идеале, тот, который является мощным, простым в управлении, легким, доступным, надежным и не требующим особого обслуживания. На практике ни один двигатель не отвечает всем этим требованиям.
Коллекторные двигатели постоянного тока обычно используются в инструментах, потому что они дешевы, а скорость и крутящий момент легко регулируются. Однако они требуют частого обслуживания из-за износа щеток. Еще одним вариантом являются бесщеточные двигатели, которые обеспечивают высокую эффективность и удельную мощность. Недостатком бесщеточных двигателей является то, что они основаны на постоянных магнитах из редкоземельных металлов, которые дороги, не подходят для высокоскоростного вращения и подвержены повреждениям при высоких температурах. Эти ограничения вызвали новый интерес к альтернативным конструкциям, в том числе к машинам с реактивным сопротивлением.
Эти ограничения вызвали новый интерес к альтернативным конструкциям, в том числе к машинам с реактивным сопротивлением.
Хотя вентильные реактивные двигатели (SRM) появились в середине девятнадцатого века, они так и не получили широкого распространения. Основной причиной этого было отсутствие точных контроллеров. Теперь, с появлением улучшенной электроники, SRM получили новый взгляд. SRM уникальны тем, что обмотки размещены на статоре, а не на роторе. Это обеспечивает упрощенную, прочную конструкцию и недорогое производство. Кроме того, в них отсутствуют постоянные магниты, что способствует дополнительному снижению затрат. Для работы ток в обмотках статора переключается от полюса к полюсу, создавая вращающееся магнитное поле. Полюса ротора стремятся выровняться с движущимся магнитным полем и следовать по пути наименьшего сопротивления вращению двигателя. Одной из потенциальных проблем с SRM является низкая плотность крутящего момента, которую можно преодолеть, увеличив ток и, непреднамеренно, нагрев. Поскольку тепло может повредить обмотки и изоляцию и со временем снизить производительность и эффективность, точное моделирование имеет решающее значение для разработки улучшенных конструкций.
Поскольку тепло может повредить обмотки и изоляцию и со временем снизить производительность и эффективность, точное моделирование имеет решающее значение для разработки улучшенных конструкций.
Какие усовершенствования можно внести в обычный SRM для повышения эффективности ручного инструмента? В этом сообщении блога мы представляем результаты совместной работы JMAG, Технологического института Шибауры и Convergent Science по оценке SRM с самоохлаждением. Этот двигатель имеет неосесимметричный явнополюсный ротор с пятью полюсами и сегментированный статор с шестью пазами. Вращающийся ротор генерирует ветер для охлаждения статора и обмоток. Вентилятор не требуется из-за эффекта самоохлаждения, что позволяет увеличить объем двигателя и крутящий момент при сохранении небольшого размера. Двигатель был разработан и охарактеризован в Shibaura. 1 JMAG использовался для расчета электромагнитных потерь (в меди и железе), которые применялись в качестве источников тепла в программе CONVERGE для прогнозирования повышения температуры твердых компонентов и моделирования эффекта самоохлаждения при вращении ротора.
CONVERGE хорошо подходит для моделирования охлаждения электродвигателей. Связь CONVERGE с JMAG позволяет легко импортировать файл геометрии NASTRAN, который включает вычисленные электромагнитные потери. Моделирование сопряженного теплообмена является высокоэффективным с управлением временем переходного суперцикла и выполняется за долю времени, необходимого для расчета полностью переходного процесса. И, наконец, CONVERGE предлагает превосходные возможности управления сеткой с автономным построением сетки и Adaptive Mesh Refinement. Эти функции позволяют легко фиксировать высокоскоростное движение ротора и динамические схемы воздушного потока.
Потери в меди в обмотках и потери в стали в статоре и роторе (рассчитанные в JMAG) были смоделированы как объемные источники тепла в CONVERGE. Для определения контактного сопротивления между обмотками и статором был смоделирован отдельный случай, когда к обмоткам подавался ток 12 А при отсутствии прокрутки ротора (рис. 1).
Рис. 1. Данные об электромагнитных потерях из JMAG использовались в качестве входных данных в CONVERGE для моделирования сопряженного теплообмена.
1. Данные об электромагнитных потерях из JMAG использовались в качестве входных данных в CONVERGE для моделирования сопряженного теплообмена. Затем эффект самоохлаждения, смоделированный в программе CONVERGE, сравнили с экспериментальными результатами. В случае высокой нагрузки самоохлаждение минимально, а при низкой нагрузке эффект более выражен. Во всех случаях результаты моделирования CONVERGE совпадают с экспериментальными измерениями в пределах 5°C (рис. 2).
Рисунок 2. Сравнение смоделированных и экспериментальных измерений эффекта самоохлаждения.Как насчет потока воздуха? На этой анимации траектория воздушного потока в зоне следа изображена векторами скорости (рис. 3). Воздух поступает с радиального направления и проходит через пазы статора для охлаждения статора и обмоток. Моделирование сопряженной теплопередачи с переходным суперциклированием изображает повышение температуры твердого статора во время продолжительной работы двигателя.