Что такое бесколлекторный двигатель и как он работает. Какие бывают типы бесколлекторных моторов. В чем преимущества бесколлекторных двигателей перед коллекторными. Где применяются бесколлекторные двигатели. Как выбрать бесколлекторный двигатель для проекта.
Что такое бесколлекторный двигатель и как он работает
Бесколлекторный двигатель (БКД) — это электродвигатель постоянного тока, в котором отсутствует щеточно-коллекторный узел. Вместо него используется электронный коммутатор, управляемый датчиком положения ротора.
Основные компоненты бесколлекторного двигателя:
- Ротор с постоянными магнитами
- Статор с обмотками
- Электронный коммутатор (контроллер)
- Датчики положения ротора (опционально)
Принцип работы бесколлекторного двигателя основан на взаимодействии магнитных полей ротора и статора:
- Электронный коммутатор подает напряжение на обмотки статора
- Вокруг обмоток создается вращающееся магнитное поле
- Это поле взаимодействует с магнитным полем постоянных магнитов ротора
- В результате создается крутящий момент, вращающий ротор
- Датчики фиксируют положение ротора и передают информацию контроллеру
- Контроллер переключает обмотки для поддержания вращения
Таким образом, в бесколлекторном двигателе функцию коммутации выполняет электроника, а не механический коллектор.
Типы бесколлекторных двигателей
Существует два основных типа бесколлекторных двигателей, различающихся конструкцией:
1. Inrunner (с внутренним ротором)
- Ротор с магнитами вращается внутри статора
- Обмотки расположены на внутренней поверхности статора
- Высокие обороты, меньший крутящий момент
- Применяются в высокоскоростных приложениях
2. Outrunner (с внешним ротором)
- Ротор с магнитами вращается снаружи статора
- Обмотки расположены на внешней части статора
- Более низкие обороты, высокий крутящий момент
- Используются там, где нужен высокий момент
Какой тип выбрать? Outrunner двигатели чаще применяются в мультироторных системах, так как позволяют получить больший крутящий момент. Inrunner подходят для высокоскоростных применений.
Преимущества бесколлекторных двигателей
По сравнению с коллекторными двигателями, бесколлекторные имеют ряд важных преимуществ:
- Высокий КПД (до 90% и выше)
- Большой срок службы за счет отсутствия щеток
- Низкий уровень электромагнитных помех
- Хорошие динамические характеристики
- Возможность работы на высоких оборотах
- Эффективное охлаждение
- Возможность работы в агрессивных средах
Основной недостаток — необходимость использования электронного контроллера, что усложняет конструкцию и повышает стоимость. Однако преимущества обычно перевешивают этот минус.

Области применения бесколлекторных двигателей
Благодаря своим достоинствам, бесколлекторные двигатели нашли широкое применение в различных сферах:
- Робототехника
- Беспилотные летательные аппараты (дроны)
- Электротранспорт (электровелосипеды, электросамокаты)
- Бытовая техника (пылесосы, кондиционеры)
- Компьютерная техника (вентиляторы, жесткие диски)
- Промышленные приводы
- Медицинское оборудование
- Авиамоделирование
Особенно активно бесколлекторные двигатели используются там, где важны высокая эффективность, надежность и точность управления.
Как выбрать бесколлекторный двигатель
При выборе бесколлекторного двигателя для проекта следует учитывать несколько ключевых параметров:
1. KV (об/мин на вольт)
Показывает, сколько оборотов в минуту делает двигатель на 1 вольт питания без нагрузки. Низкий KV дает больший крутящий момент, высокий — большую скорость вращения.
2. Максимальный ток
Определяет, какой максимальный ток может выдержать обмотка двигателя в течение короткого времени. Влияет на выбор регулятора скорости (ESC).

3. Максимальное напряжение
Показывает, какое максимальное напряжение можно подать на обмотки двигателя. Важно для правильного подбора аккумулятора.
4. Мощность
Определяет, какую работу может выполнить двигатель. Рассчитывается как произведение напряжения на ток.
5. Размеры и вес
Важны для компактных проектов, где критичны габариты и масса компонентов.
Правильный выбор этих параметров позволит подобрать оптимальный двигатель для конкретной задачи.
Управление бесколлекторными двигателями
Для управления бесколлекторными двигателями используются специальные контроллеры (ESC — Electronic Speed Controller). Существует несколько методов управления:
1. Скалярное управление
- Простой метод, поддерживающий постоянное отношение напряжения к частоте
- Подходит для задач, не требующих высокой динамики
- Диапазон регулирования скорости ограничен (до 1:10)
2. Векторное управление
- Более сложный метод, контролирующий амплитуду, частоту и фазу напряжения
- Обеспечивает высокое быстродействие и широкий диапазон регулирования
- Требует более мощного микроконтроллера
3. Прямое управление моментом
- Обеспечивает быстрое и точное управление крутящим моментом
- Хорошо подходит для высокодинамичных приложений
- Требует сложных алгоритмов управления
Выбор метода управления зависит от конкретной задачи и требований к производительности системы.

Сравнение бесколлекторных и коллекторных двигателей
Чтобы лучше понять преимущества бесколлекторных двигателей, сравним их с традиционными коллекторными:
| Параметр | Бесколлекторный двигатель | Коллекторный двигатель |
|---|---|---|
| КПД | Высокий (85-95%) | Средний (70-80%) |
| Срок службы | Длительный | Ограничен износом щеток |
| Максимальные обороты | Очень высокие | Ограничены коллектором |
| Техническое обслуживание | Минимальное | Требует регулярной замены щеток |
| Стоимость | Выше | Ниже |
| Управление | Требует электронного контроллера | Простое, не требует контроллера |
Как видно из сравнения, бесколлекторные двигатели превосходят коллекторные по большинству параметров, но имеют более высокую стоимость и сложность управления.
Перспективы развития бесколлекторных двигателей
Технологии бесколлекторных двигателей продолжают развиваться. Основные направления развития включают:
- Улучшение характеристик магнитных материалов
- Совершенствование алгоритмов управления
- Интеграция двигателей и контроллеров
- Разработка новых конструкций для специфических применений
- Снижение стоимости производства
Ожидается, что в будущем бесколлекторные двигатели будут все шире применяться в различных отраслях, постепенно вытесняя коллекторные аналоги.

Заключение
Бесколлекторные двигатели представляют собой современную и эффективную технологию в области электроприводов. Их преимущества — высокий КПД, надежность, долговечность и отличные динамические характеристики — делают их отличным выбором для широкого спектра применений.
Несмотря на более высокую стоимость и необходимость использования электронных контроллеров, бесколлекторные двигатели становятся все более популярными в робототехнике, авиамоделировании, электротранспорте и многих других областях.
С развитием технологий и снижением стоимости производства, можно ожидать дальнейшего расширения сферы применения бесколлекторных двигателей и постепенного вытеснения ими коллекторных аналогов во многих приложениях.
«Бесколлекторные двигатели» ЛикБез и проектирование — Паркфлаер
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
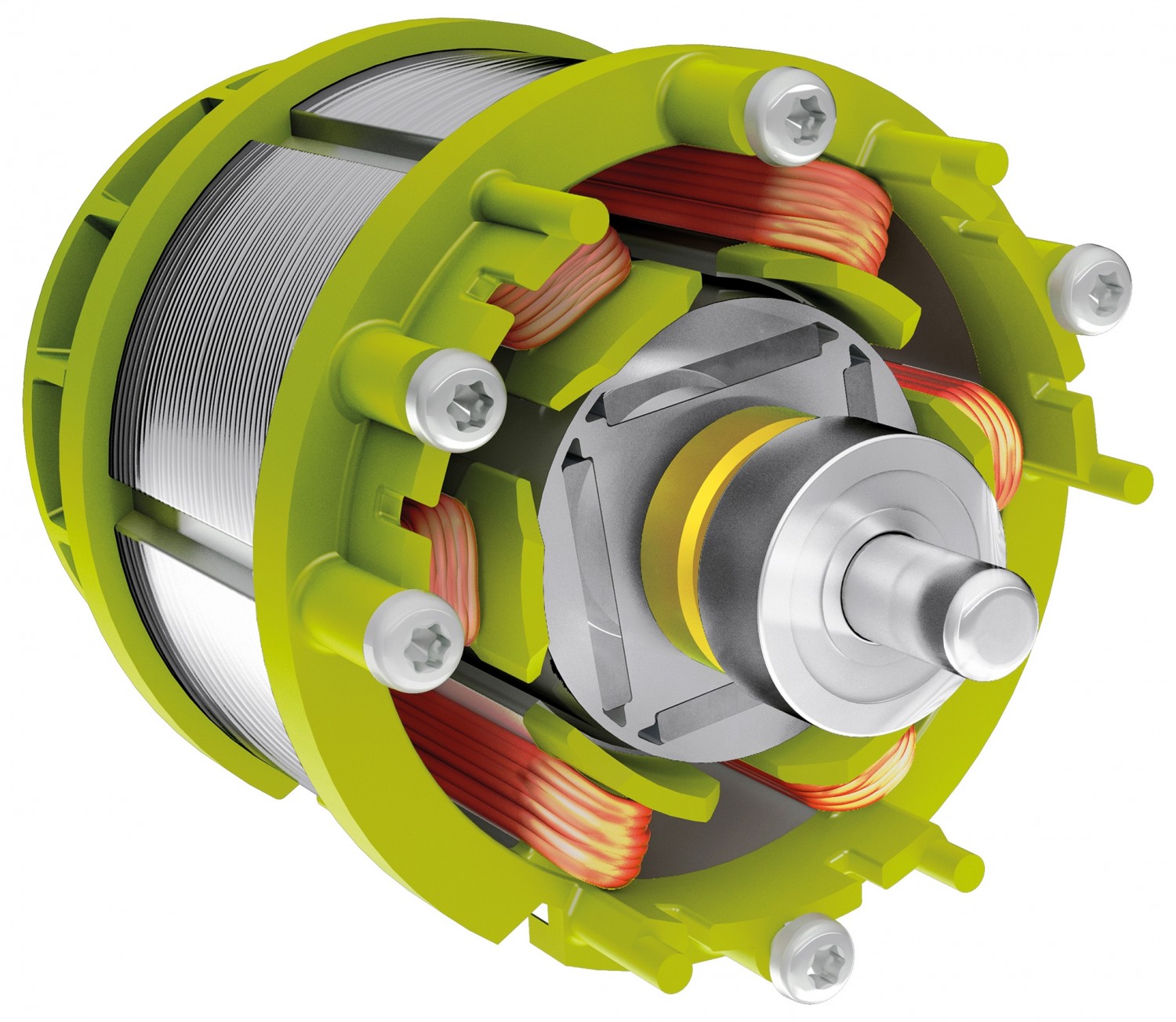
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1. 73 раз. (впоследствии было выбрано соединение треугольник)
73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2. 1А
1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи.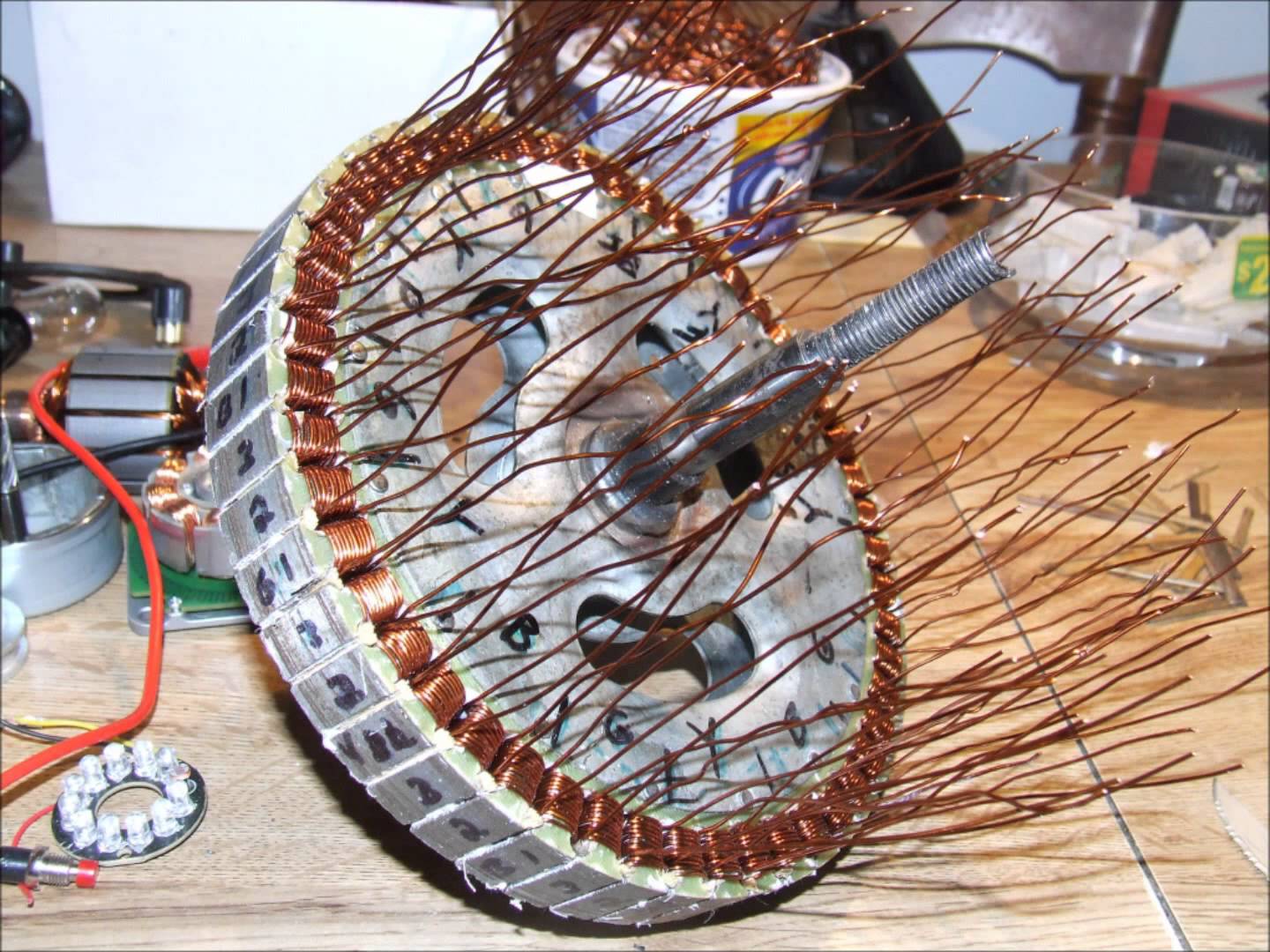 Удачи всем)
Удачи всем)
Самодельный бесколлекторный двигатель за час
Бесколлектронные или вентильные двигатели работают на постоянном токе. Они не имеют щеточно-коллекторного узла, его роль выполняет полупроводниковый коммутатор, управляемый датчиком положения ротора. В конструкции агрегата присутствуют: ротор, на котором размещены постоянные магниты; статор с обмотками.
Двигатели такого типа используют в моделировании. На рынке они есть, но только от зарубежных производителей. Имеют большую стоимость. Их можно делать самостоятельно – процесс сложный, требует специального оборудования, материалов, знаний. Хотя есть проекты по созданию демонстрационных моделей бесколлекторных двигателей, которые можно сделать за час.
Один из них требует подготовки небольшого по длине деревянного бруска для ротора. У заготовки должно быть квадратное сечение. На каждой грани определяют центр: проводят диагонали – точка их пересечения и определяет его.
Сверлят в центре каждой грани бруска глухие отверстия.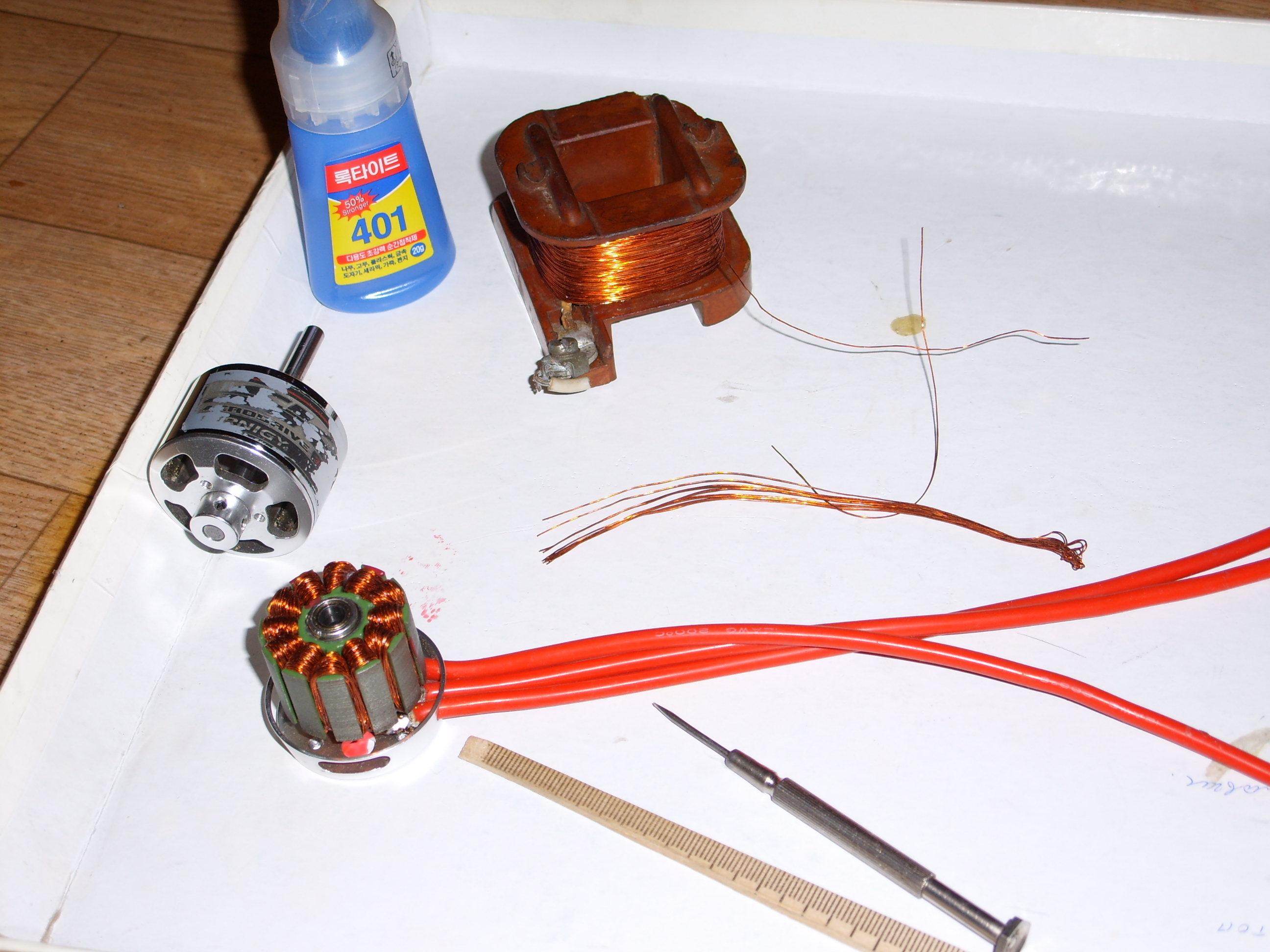 Пользуются перьевым сверлом Диаметр и глубина отверстий – под магниты, которые заготавливают заранее (необходимо 4 штуки).
Пользуются перьевым сверлом Диаметр и глубина отверстий – под магниты, которые заготавливают заранее (необходимо 4 штуки).
Магниты крепят внутри указанных отверстий с помощью клея, размещая их одинаковыми полюсами наружу. После у деревянного бруска срезают углы и сверлят осевое сквозное отверстие. Его диаметр – по диаметру вязальной спицы (ее вводят в отверстие и закрепляют положение суперклеем). Концы спицы должны равномерно выступать с обеих сторон бруска.
Занимаются изготовлением электромагнита. Пользуются пустой катушкой от ниток. На нее наматывают в одном направлении десять метров медной проволоки диаметром сечения 0,35 мм. Проводник обязательно должен быть изолированным.
Готовят еще один брусок произвольного сечения; закрепляют на его боковой грани изготовленный ранее электромагнит (ось катушки перпендикулярна поверхности грани). Приклеивают брусок торцом с одного края основания (например, к деревянной дощечке) – электромагнит располагают к центру основания.
Перпендикулярно оси электромагнита располагают подготовленный ранее ротор. Его концы оси-спицы размещают в отверстиях деревянных брусков,установленных в соответствующие места на основание. На один из концов спицы крепят небольшие лопасти вентилятора.
Его концы оси-спицы размещают в отверстиях деревянных брусков,установленных в соответствующие места на основание. На один из концов спицы крепят небольшие лопасти вентилятора.
Используют небольшой магнит и медную проволоку. Конец последней изгибают, устраивая небольшое кольцо. Приклеивают к нему магнит. Размещают так, чтобы он притягивался к ротору.
Устраивают на поверхности основания контактные элементы. Подключают к ним выводы катушки электромагнита. Подводят питание и тестируют самодельный бесколлекторный электродвигатель.
Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
- Коллекторные/Brushed (др. названия: DC)/Сoreless.
- Бесколлекторные/Brushless.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.

- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени.
 Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC. - Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
Коллекторный электродвигатель: проверка своими руками
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр. Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять и скоростью вращения электродвигателя и исполнительного механизма. Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Скалярное управление
Скалярный метод управления обеспечивает постоянное отношение амплитуды напряжений обмоток статора к частоте. Такой метод позволяет контролировать скорость вращения электродвигателя в диапазоне до 1:10. Метод прост в реализации и подходит для большинства задач управления двигателем, где не требуется высокая динамика работы. Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Медленный отклик при переходном процессе связан с тем, что данный метод контролирует величину напряжения и частоты вместо управления фазой и величиной тока.
Векторное управление
Векторное управление позволяет управлять не только амплитудой и частотой, но и фазой управляющих напряжений. Таким образом данный метод обеспечивает максимальное быстродействие и регулирование во всем диапазоне скоростей, что невозможно выполнить с помощью скалярного управления. Недостатками данного метода является сложность реализации и более высокая цена, связанная с необходимостью использования более мощного микроконтроллера. Данный способ управления используется в таких задачах, как: робототехника, беспилотные аппараты, электрические транспортные средства, устройства автоматики и др.
- Прямое управление моментом с пространственно векторной модуляцией напряжения
- Прямое самоуправление
Бездатчиковое полеориентированное управление СДПМ
Обзор бездатчиковых методов управления синхронным электродвигателем с постоянными магнитами во всем диапазоне скоростей, начиная от определения начального положения и заканчивая регулировкой скорости и момента в рабочем диапазоне
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
Примеры использования серводвигателей в проектах
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Универсальные коллекторные двигатели
Несмотря на то, что коллекторный узел можно назвать самым слабым местом электродвигателя, подобные модели нашли широкое применение. Все благодаря невысокой цене и легкости управления скоростью. Коллекторные двигатели переменного тока стоят практически в любой бытовой технике, как крупной, так и мелкой. Миксеры, блендеры, кофемолки, строительные фены, даже стиральные машины (привод барабана).
Универсальный коллекторный двигатель работает от постоянного и переменного напряжения
По строению универсальные коллекторные двигатели не отличаются от моделей постоянного тока с обмотками возбуждения. Разница, безусловно есть, но она не в устройстве, а в деталях:
- Схема возбуждения всегда последовательная.
- Магнитные системы ротора и статора для компенсации магнитных потерь делают шихтованного типа (единая система без сплошных разрезов).

- Обмотка возбуждения состоит из нескольких секций. Это необходимо, чтобы режимы работы на постоянном и переменном напряжении были схожи.
Работа коллекторных электродвигателей универсального типа основана на том, что если одновременно (или почти одновременно) поменять полярность питания на обмотках статора и ротора, направление результирующего момента останется тем же. При последовательной схеме возбуждения полярность меняется с очень небольшой задержкой. Так что направление вращения ротора остается тем же.
Достоинства и недостатки
Хотя универсальные коллекторные двигатели активно используются, они имеют серьёзные недостатки:
- Более низкий КПД при работе на переменном токе (если сравнивать с работой на постоянном такого же напряжения).
- Сильное искрение коллекторного узла на переменном токе.
- Создают радиопомехи.
- Повышенный уровень шума при работе.
Во многих моделях строительной техники
Но все эти недостатки нивелируются тем, что при частоте питающего напряжения в 50 Гц они могут вращаться со скоростью 9000-10000 об/мин. По сравнению с синхронными и асинхронными двигателями это очень много, максимальная их скорость — 3000 об/мин. Именно это обусловило использование этого типа моторов в бытовой технике. Но постепенно они заменяются современными бесщеточными двигателями. С развитием полупроводников их производство и управление становится всё более дешёвым и простым.
Оцените статью:Бесколлекторный мотор GoolRC типоразмера 3660 для настольной сверлилки
Нестандартное использование бесколлекторного мотора, в любительских целях.Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.
Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото
Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе
С заднего торца видно подшипник
Заявлена защита от брызг и влаги
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм
Габариты корпуса двигателя 36х60 мм
Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки
Пробуем закрепить крестообразный рычаг для фотографии
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические.
Фото платы управления сервой
Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока.
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)
Скрин из программы для печати на принтере
Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11
Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.
Соединяем все, по цветам.
Источник показывает, что холостой ток контроллера небольшой (0.26А)
Теперь сверлильный станок.
Собираем все и крепим на стойку
Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат
Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
Как отремонтировать бесколлекторный мотор Velineon PRO Хобби – интернет-журнал о моделизме
вторник, 16 октября 2018 г.
Все знают о том, что бесколлекторные двигатели более мощные и производительные, если сравнивать их с коллекторными. Однако не все знают, что эти моторы и более требовательны к обслуживанию и эксплуатации.
Что делать, если вдруг вы заметили, что ваш подопечный перестал работать или стал вести себя странно?
Выбрасывать и покупать новый? — Не торопитесь, возможно, удастся обойтись “малой кровью” и минимальными финансовыми вложениями. Как? — Отремонтировать его своими руками!
Бесколлекторные RC двигатели, такие как Velineon® 3500, обеспечивают превосходную производительность и эффективность по сравнению с их коллекторными аналогами. Они также могут быть перебраны и отремонтированы, что позволит их эксплуатировать в течение многих лет без ущерба для производительности. Подшипники — вот типичное слабое звено в конструкции бесколлекторных двигателей. Неисправные подшипники обычно приводят к перегреву и снижению производительности, уменьшают время работы узла. Это также может привести к тому, что двигатель будет работать рывками (можно легко узнать, вручную повернув выходной вал). В этой статье будет показано, как восстановить работоспособность двигателя Velineon 3500, заменив подшипники и другие детали, подверженные естественному износу.
Данный экземпляр принесли в нашу сервисную мастерскую с симптомами перегрева и нестабильной работы. Поверхностная ржавчина видна на спуре, при попытке вращения вала вручную чувствуется сопротивление и рывки. Как правило, все это — признак неисправного подшипника.
Начнем с разборки двигателя. Используйте 2 мм биту для винтов, крепящих мотораму и 1.5 мм биту для демонтажа пиньона.
Отщелкните пластиковую заглушку. Используйте 1.5 мм биту для четырех винтов, крепящих торцевую деталь.
Осторожно извлеките ее. Необходимости снимать подшипник нет, так как ремкомплект включает в себя новую деталь целиком. Не потеряйте тонкие шайбы, которые могут находиться на валу двигателя. Они будут установлены повторно.
Ротор удерживается на месте сильным магнитным полем. Надавите на вал двигателя, используя твердую поверхность (например, стол). Это позволит извлечь ротор. Держите его плотно и достаньте из корпуса. Будьте осторожны при снятии ротора! Действие электромагнитных сил может привести к тому, что ротор попытается вернуться на свое место и ваши пальцы могут пострадать.
Демонтировав ротор, самое время извлечь передний подшипник из корпуса двигателя. Здесь могут возникнуть некоторые трудности. Постарайтесь использовать похожую по размеру оправку, чтобы извлечь подшипник целиком.
Детальный осмотр подшипников позволяет подтвердить проблему. Они сильно заржавели, что негативно сказывается на двигателе — он работает с повышенной нагрузкой, что вызывает перегрев узла в целом. Именно поэтому очень важно после каждого катания, когда происходит контакт подшипников с влагой, использовать WD-40, чтобы вытеснить из них влагу и предотвратить образование ржавчины. Это избавит вас от проблем в будущем. К счастью, даже если произошло то, что произошло, этот двигатель можно отремонтировать, восстановив полностью его производительность.
Ремкомплект для Velineon 3500 содержит все детали, необходимые для восстановления двигателя. Используйте специальный очиститель для электронных контактов электродвигателя или продуйте сжатым воздухом корпус двигателя. Обязательно надевайте защитные очки во время данной процедуры. Замените два подшипника и установите новую латунную втулку на задней части вала двигателя. Повторно используйте тонкие шайбы на валу двигателя. Они должны быть максимально близко к центру.
Аккуратно вставьте ротор в корпус двигателя, берегите пальцы. Установите на место торцевую деталь, закрепите ее винтами из ремнабора. Наконец, очистите поверхность корпуса двигателя и установите пластиковую заглушку. Теперь ваш мотор полностью восстановлен и готов к действию!
Двигатель, показанный в этой статье, не получил должного внимания и технического обслуживания, необходимого после запуска и эксплуатации в воде. Обязательно ознакомьтесь с советами по уходу за моделью в условиях повышенной влажности, приведенными в руководстве вашего автомобиля, для обеспечения надлежащего ухода. Помните, что при должном обслуживании ваш Velineon будет работать долго и обеспечит модель запасом мощности и динамичности, а вас — потрясающими эмоциями от любимого хобби!
| В любом случае, если у вас остались вопросы — смело звоните + 7 (495) 411-90-19, +7 (495) 419-16-90 или пишите — [email protected], приходите к нам! Наши менеджеры и продавцы с радостью помогут разобраться и проконсультируют по любым вопросам, а сервис-мастер окажет техническую поддержку. Ждем вас! |
Переделка двигателя от стиральной машины в электрогенератор
В этой статье будет рассмотрена переделка двигателя от стиральной машины в электрогенератор. Все этапы переделки будут пошагово расписаны и проиллюстрированы, так что если у вас есть поломанная стиральная машина, не спешите её выбрасывать!
Чистая энергия, полученная на основе природных ресурсов, является одной из самых популярных тем сегодня. Представьте, что у вас на даче или загородном доме стоит генератор, который питает все ресурсы вашего хозяйства бесплатным электричеством. Это может быть ветро- или гидротурбина – неважно. Вы думаете, это все сказки? Вовсе нет.
На самом деле это технические разработки, которые не так уж сложно и дорого осуществить у себя дома своими руками.
Один из таких вариантов на основе бесколлекторного двигателя постоянного тока мы хотим сегодня представить. Автор предлагает такой двигатель от стиральной машины перемонтировать в генератор, перепаяв особым образом ведущие катушки статора. После такой переделки, двигатель можно использовать для ветротурбины. А если его оборудовать водозаборным устройством наподобие турбины Пелтона, тогда можно соорудить гидроэлектрогенератор.
Необходимые материалы и инструменты
Как вы уже наверное поняли, сегодня нам понадобится только сам двигатель от стиральной машины. Автор использовал инверторный двигатель постоянного тока от американской стиралки Fisher&Paykel. Подобные двигатели использует в своей продукции компания LG, присутствующая у нас на отечественном рынке.
Также нам понадобится:
- Паяльник, флюс и припой;
- Горячий клей;
- Мелкозернистая наждачка – нулевка.
Инструменты:
- Кусачки
- Плоскогубцы
- Малярный нож
Приступаем к перемонтировке двигателя
Для работы необходимо будет демонтировать двигатель из корпуса машины. Он состоит из трех основных частей:
- Статор – круглая платформа с ведущими катушками обмотки, расположенными вдоль наружной кромки окружности;
- Ротор – пластиковая или металлическая с пластиковым сердечником крышка. По периметру ее внутренней стенки размещены постоянные магниты;
- Вал – центральная часть двигателя, оснащенная подшипниками для передачи кинетической энергии барабану стиральной машины.
Работать мы будем непосредственно со стартером.
Подготовка статора
Размещаем платформу двигателя на столе, и приступаем к работе. Наша цель – перепаять соединения фаз по другой схеме, отличной от оригинала (фото).
Для удобства можно разметить группы по 3 катушки маркером. Кусачками обрезаем каждый из 6 выходов катушек согласно схеме.
Обрезанные края необходимо отогнуть отверткой или от руки, чтобы с ними было в последствии удобнее работать.
Зачищаем каждый контакт мелкозернистой наждачной бумагой для улучшения спайки.
Когда все будет готово и очищено от мусора, соединяем вместе каждую вторую группу из трех контактов. Ручную скрутку усиливаем плоскогубцами.
Паяльником залуживаем скрутку с помощью флюса, и распаиваем ее оловянным припоем. Отмыкаем скрутку, и пропаиваем ее с обратной стороны. То же проделываем и с остальными контактами. В итоге у нас должно получиться семь скруток.
Закольцовывание фаз
Зачищаем контактную группу, использующуюся для подачи питания двигателю.
Теперь необходимо закольцевать оставшиеся 3 фазы. Подбираем кольцо для первой фазы. Его делаем из отрезка медного многожильного кабеля. Размечаем и отрезаем его по размеру внутренней окружности платформы.
Оголяем изоляцию в местах соединения со свободными контактами, и зачищаем их наждачкой. Начинаем припаивать кольцо с контактной группы, проходя каждый из семи, заканчиваем последним контактом. Для надежности соединения обвязываем конец контакта на кольце.
Вторую и третью фазы закольцовываем по аналогии с первой. Необходимо следить за тем, чтобы не припаять соседние контакты между собой.
Нанесение изоляции
Наша переделка двигателя под генератор готова. Остается лишь изолировать спайки на кольце и катушках. Альтернативный метод использовал автор изобретения, применив в качестве изолятора горячий клей.
По его заверениям, такая изоляция еще ни разу не подводила. Однако для тех, кто не уверен в таком способе, стоит воспользоваться изолентой. По окончанию работ двигатель собирается, и его можно применять в сборной конструкции генераторной установки.
Смотрите видео
Самодельная бесщеточная конструкция, напечатанная на 3D-принтере
Здесь мы собираемся построить самодельный бесщеточный двигатель. Сначала мы увидим, как работает бесщеточный двигатель, типы бесщеточных двигателей и, наконец, само здание. Этот двигатель напечатан на 3D-принтере, но есть много способов сделать самодельный бесколлекторный двигатель, если у вас нет 3D-принтера.
Бесщеточный двигатель
Бесщеточный электродвигатель постоянного тока (двигатели BLDC, двигатели BL), также известные как двигатели с электронной коммутацией (ECM, двигатели EC), представляют собой синхронные двигатели, которые питаются от источника постоянного тока через встроенный инвертор / импульсный источник питания, который вырабатывает электрический сигнал переменного тока для привода двигателя.В этом контексте переменный ток не подразумевает синусоидальную форму волны, а скорее двунаправленный ток без ограничений по форме волны. Дополнительные датчики и электроника контролируют выходную амплитуду и форму волны инвертора (и, следовательно, процент использования / эффективности шины постоянного тока) и частоту (то есть скорость ротора).
Роторная часть бесщеточного двигателя часто представляет собой синхронный двигатель с постоянными магнитами, но также может быть вентильным реактивным двигателем или асинхронным двигателем [необходима ссылка].
Бесщеточные двигатели могут быть описаны как шаговые двигатели; однако термин «шаговый двигатель» обычно используется для двигателей, которые специально разработаны для работы в режиме, в котором они часто останавливаются, когда ротор находится в определенном угловом положении.На этой странице описаны более общие принципы работы бесщеточного двигателя, хотя они и частично совпадают.
Типы конструкции
Бесщеточные двигатели могут иметь несколько различных физических конфигураций: В «традиционной» (также известной как inrunner ) конфигурации постоянные магниты являются частью ротора. Ротор окружен тремя обмотками статора. В конфигурации outrunner (или с внешним ротором) радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, который окружает сердечник.Плоский или осевой тип потока, используемый там, где есть ограничения по пространству или форме, использует пластины статора и ротора, установленные лицом к лицу. Outrunners обычно имеют больше полюсов, настроенных в тройках для поддержания трех групп обмоток, и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Типы обмоток
CD-ROM [9N12P]
Где 9N — для 9 статоров, а 12P — для 12 полюсов. Это типичная обмотка, используемая в двигателях CD-ROM, обычно оканчивающаяся звездой (звездой).
Это первая схема намотки, с которой столкнутся многие производители и перемотчики двигателей. Это также самый простой способ намотки, поскольку все зубцы намотаны в одном направлении, то есть ABCABCABC.
dLRK [12N10P & 12N14P]
Вот наиболее распространенная схема обмотки из всех, так как она используется в большинстве моделей двигателей с выносными подножками, которые производятся в настоящее время.
Схема dLRK является производным от схемы обмотки LRK, которая помещает бесщеточные двигатели Outrunner на карту.
Соедините вместе: начало A — конец C, начало B — конец A, начало C — конец B.
dLRK Evolution [12N10P & 12N14P]
Вот интересная мутация схемы dLRK, без сомнения направленная на то, чтобы упростить и аккуратнее отключение обмоток. Это мой фаворит для моторов 12Н14П.
Обратите внимание на то, как начало и конец фаз, которые необходимо соединить вместе, выходят из одних и тех же слотов, что делает процесс завершения полностью надежным.
LRK [12N10P & 12N14P]
Именно здесь началась «бесщеточная революция». Схема обмотки LRK всегда будет помнить как «дедушку» бесщеточных двигателей Outrunner.
«LRK» — это аббревиатура, образованная от имен трех людей, которые популяризировали мотор-аутраннер: Лукас, Ретцбах и Кюфус. В 2001 году они задокументировали использование этой схемы обмотки для двигателей моделей самолетов. А как говорят в классике, «остальное уже история».
Соедините вместе: начало A — конец C, начало B — конец A, начало C — конец B.
Сборка самодельного 3D-печатного бесщеточного двигателя
Прежде всего, вам необходимо загрузить 3D-файлы .stl и распечатать их. Вы можете скачать файлы по ссылке ниже.
Вы можете скачать 3д детали здесь:
Распечатайте две части, используя материал PLA, 4 периметра и 25 заполнителей. Как только вы получите свое тело, мы можем приступить к следующей части. Мы будем использовать неодимовые круглые магниты размером 10 на 3 мм.Чтобы узнать, какой полюс каждого магнита, мы ставим их один к другому из стороны в сторону. Если магнит хочет вращаться, это означает, что грани одного полюса, а мы этого не хотим. Мы хотим иметь один северный полюс, затем один южный, затем другой северный и т. Д.
>Как только у вас будет 14 магнитов в ряд, начните и пометьте каждый магнит буквами N и S. Неважно, какой из них южный, а какой северный, важно, чтобы один был противоположен следующему. Теперь мы можем начать размещать эти магниты внутри печатной части.
>Теперь мы возьмем внутреннюю часть и добавим одну биту 10х4 мм на нижней стороне и одну на верхнюю часть. В качестве вала мы используем винт M5 длиной 5 см.
>Наконец, мы добавляем 12 винтов M3 длиной 18 мм в каждое отверстие и склеиваем их.
>Теперь нам нужно сделать обмотки для нашего мотора. Мы будем использовать тип обмотки dLRK для этого 12-полюсного 14-магнитного бесщеточного двигателя. Следуйте следующей схеме, чтобы намотать катушки.
>Не забудьте пометить начало каждого провода с помощью Ain, Bin, Cin, а в конце — с помощью Aout, Bout и Cout, чтобы не перепутать их.Просто приклейте к проводу небольшую этикетку. Мы сделаем катушки по 60 витков с медным проводом 0,2 мм. Как только обмотка будет завершена, припаяйте вместе Ain с Cout, Bin с Cin и Aout с Bout. Теперь просто закройте мотор и завинтите его, и мы готовы к работе. Подключите 3 клеммы к ESC и проверьте его. Вы всегда можете изменить настройки для получения лучших результатов. Измените количество витков обмотки, расстояние от полюса до магнита, размер и т. Д.
См. Другие руководства:
Драйвер бесщеточного двигателя постоянного тока | Двигатель BLDC
Растет использование бесщеточных двигателей постоянного тока (BLDC).Но для их управления обычно требуется информация о положении ротора для выбора подходящего угла коммутации. Обычно датчик Холла используется для определения положения ротора. Но в приложениях, чувствительных к стоимости, часто желательна схема коммутации без датчиков. Схема драйвера бесщеточного двигателя постоянного тока, описанная здесь, использует микросхему драйвера DRV10866 для управления небольшим вентилятором BLDC без использования каких-либо датчиков положения. Скорость вентилятора BLDC можно плавно изменять без обычных шагов, связанных с обычным вентилятором переменного тока.
Схема привода бесщеточного двигателя постоянного тока
На рис. 1 показана схема бездатчикового драйвера двигателя BLDC. Схема построена на NE555 (IC1), DRV10866 (IC2) и нескольких других компонентах.
Рис. 1: Схема драйвера бесщеточного двигателя постоянного токаДрайвер DRV10866 IC от Texas Instruments используется для привода небольшого трехфазного двигателя BLDC (M1). Схема представляет собой трехфазный драйвер двигателя без датчика со встроенными силовыми полевыми МОП-транзисторами, обеспечивающими максимальный ток возбуждения до 680 мА (пиковое значение).DRV10866 специально разработан для приводов с низким уровнем шума и малым количеством компонентов. Схема без датчика обратной ЭДС 150 ° используется для управления трехфазным двигателем.
Подтягивающий резистор 100 кОм (R2) используется на выводе 1 IC2. Контакты 2, 4, 7 и 6 IC2 подключены к общей фазе A, фазе B и фазе C двигателя BLDC соответственно. Контакт 10 IC2 подключен к контакту 7 IC1 для получения сигнала с широтно-импульсной модуляцией (PWM) от IC1 для управления скоростью двигателя BLDC.
Выходной сигнал (ШИМ) доступен на выводе 7 (DIS) микросхемы IC1, а не на обычном выводе 3 микросхемы.Рабочий цикл сигнала ШИМ 25 кГц (приблизительно) можно регулировать от 5% до 95% с помощью потенциометра VR1. Скорость двигателя BLDC можно контролировать, изменяя рабочий цикл сигнала PWM. Поворот VR1 против часовой стрелки снижает рабочий цикл, что, в свою очередь, снижает скорость двигателя, и наоборот.
Строительство и испытания
Односторонняя печатная плата для драйвера бесщеточного двигателя постоянного тока показана на рис. 2, а схема ее компонентов — на рис. 3. Соберите схему на рекомендованной печатной плате, чтобы минимизировать ошибки сборки.IC2 должен быть установлен на стороне пайки печатной платы.
Рис. 2: Односторонняя печатная плата драйвера бесщеточного двигателя постоянного тока 3: Компоновка компонентов для печатной платы Загрузите печатную плату и компоновку компонентов в формате PDF: нажмите здесьПосле сборки компонентов подключите источник постоянного тока 5 В к разъему CON1. Чтобы проверить правильность работы схемы драйвера бесщеточного двигателя постоянного тока, проверьте правильность подачи 5 В для цепи на TP1 по отношению к TP0. Поверните VR1 по часовой стрелке или против часовой стрелки, чтобы увеличить или уменьшить скорость двигателя.
Для более интересных схемных проектов: нажмите здесь
Автор — бакалавр технических наук (электроника и связь) из GGSIPU, New Delhi
Эта статья была впервые опубликована 6 февраля 2017 г. и обновлена 15 декабря 2020 г.
10 лучших бесщеточных двигателей, которые можно купить в Интернете [обновлено в 2021 году]
Бесщеточные двигатели постоянного тока используются в самолетах и наземных транспортных средствах. Этот двигатель работает эффективно с высокой удельной мощностью за счет меньшего шума и требует меньшего обслуживания, чем щеточные двигатели постоянного тока.Для сборки ротора используются постоянные магниты. Он похож на двигатель переменного тока с постоянным числом оборотов и может производиться серийно.
Прежде чем выбирать бесщеточный двигатель, необходимо помнить об этих двух основных моментах.
- Размер двигателя — В основном производители используют стандартную схему именования двигателей из 4-значного числа. Например, двигатель с названием 2205, в котором первые 2 цифры представляют диаметр статора (в мм). Последние 2 цифры обозначают высоту (в мм.). Итак, разумно выбирайте размер двигателя, который требуется для вашего проекта.
- Постоянная скорости и оборотов — Скорость двигателя зависит от скорости, необходимой вам для полета самолета или игрушки. Итак, чтобы сравнить скорость двигателя, вам нужно искать номер KV. Этот киловольт равен оборотам на вольт. Он объясняет, сколько раз двигатель повернется на каждый вольт. Если напряжение увеличивается, двигатель будет быстро вращаться.
Помимо этих двух ключевых факторов, покупатель должен учитывать различные факторы, такие как размер обмотки, дуговые магниты, валы двигателя и т. Д.которые четко упомянуты в приведенном ниже «Руководстве по покупке» . Кроме того, мы разработали несколько самых продаваемых бесщеточных двигателей. Просто просмотрите их и выберите свои лучшие бесщеточные двигатели постоянного тока в соответствии с вашими требованиями.
Лучшие бесщеточные двигатели 10 лучших бесщеточных двигателей. Обзоры 1. Бесщеточная система питания TraxxasНАЖМИТЕ ЗДЕСЬ ДЛЯ ЦЕНЫ
Сначала прочтите отзывы клиентов Здесь… двигатель Traxxas 3350R Velineon VXL -3s Brushless Power System.Это отличное обновление по сравнению с машинами Traxxas в масштабе 1/10, а также отличная выходная мощность.
В нем используются неодимовые магниты на основе сверхвысоких температур, а также высокоскоростные шарикоподшипники и ротор, который точно сбалансирован. Это дает ему высокую мощность и очень долгий срок службы с высокой эффективностью.
Низкие требования к техническому обслуживанию, уникальное синее анодирование и мощность 3500 кВ делают его отличным центральным элементом вашего домашнего робота или автомобиля.
Подробные характеристики
- 4-полюсный двигатель с номинальным напряжением 3500 об / мин / В
- Монтажная пластина регулятора скорости
- ESC имеет 3 профиля движения: от спортивного, гоночного до тренировочного.
- Ограничивает дроссельную заслонку до 50% для новых драйверов
- В нее интегрировано двухступенчатое обнаружение низкого напряжения для использования батареи
- Большой крутящий момент обеспечивается благодаря неодимовым магнитам, чувствительным к высоким температурам
- Имеет запатентованный Traxxas High-Current Разъем для лучшей и простой разработки
Что нам понравилось в нем
- Водонепроницаемый инновационный дизайн
- Высоко оценены и оценены
- Также имеется дополнительный охлаждающий вентилятор, который вы можете получить для эффективной работы
Вещи, которые мы не сделали не нравится
- Некоторые незначительные функциональные проблемы в некоторых частях
Купить сейчас на Amazon
2.Бесщеточный двигатель IflightНАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УЗНАТЬ ЦЕНУ
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет бесщеточный двигатель iFlight, состоящий из 4 частей. IFlight XING-E 2207 — это бесщеточный двигатель 6S, созданный для гоночного дрона FPV размером 160 мм или микроквадрокоптера.
Большая мощность, большая тяга при минимальном весе, прочная конструкция и использование высококачественных материалов в конструкции делают iFlight XING идеальным зверьком в производительности.
Эти двигатели имеют высококачественные жаростойкие обмотки на основе магнитов N52H.Их нескользящая конструкция делает гребной винт идеальным для увеличения трения при контакте и, таким образом, повышения общей долговечности.
Подробные спецификации
- Динамически сбалансированные, устойчивые к раздавливанию демпфирующие подшипники и очень эффективно устраняют все вибрации.
- Стальной вал длиной 4 мм с очень высокой прочностью
- Защищенные провода двигателя
- Электромагнитно согласованные магниты и статоры
- Подшипники NSK из Японии
- Магниты дуги N52H
- Основание и раструб изготовлены из алюминия 7075
- Подходит для рамы FPV 160 мм
Что нам понравилось в нем
- Поставляется с несколькими отверстиями для отвода тепла, которые не нагружают дрон из-за тепла
- Поддерживает 6S
- Обмотки с высокой термостойкостью
Что нам не понравилось в нем
Купить сейчас на Amazon
3.Бесщеточный двигатель CrazeponyНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы покупателей здесь…
Еще один набор бесщеточных двигателей для гоночных дронов с дистанционным управлением, Crazepony Emax ECO 2207 — это пакет из четырех; Бесщеточные двигатели 1700 кВ 3-6С.
Благодаря подшипникам диаметром 9 мм, многожильным катушкам и полому валу двигатели отличаются долговечностью. Их новаторский дизайн говорит о высокой стоимости двигателя и, что самое главное, о доступности.
Несмотря на то, что двигатель долговечен, он также имеет легкий вес, сохраняя при этом свой класс. В двигателе используется высокоточный алюминий аэрокосмического класса, а также усиленный полый стальной вал размером 9 мм x 4 мм.
Подробные спецификации
- Подшипники из авиационного алюминия 9 мм x 4 мм
- Номинальное напряжение 1700 об / мин / кВ
- Длина 32,6 мм и диаметр 27,45 мм
- Поставляется с каркасом 12N14P
- 3-6 ячеек
- Пропеллер размером от 5 до 5 дюймов.5 дюймов
- Вес без силиконовой проволоки составляет всего 31,5 грамма
- Двойное анодирование
- Многослойная медная обмотка
- Стальной вал с расположением отверстий 16 мм x 16 мм и,
- 115 мм 20 AWG Силиконовый провод
Что нам понравилось в нем
- Многожильная технология, которая уравновешивает скорость, мощность и контроль
- Используется медный сплав, разработанный EMAX, так что электроны будут течь более свободно и эффективно при необходимости
- Инновационный дизайн и высокая производительность
Что нам в нем не понравилось
- Ничего особенного, чтобы упоминать
Купить сейчас на Amazon
4.Бесколлекторные двигатели BetafpvНАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УЗНАТЬ ЦЕНУ
Прочтите отзывы клиентов здесь…
BETAFPV — еще один набор бесщеточных двигателей для микрокоптеров, который поставляется в упаковке по 4 штуки. Он также широко используется во многих других проектах DIY.
Разработанный для работы с большинством дронов модели 3S whoop, BETAFPV больше рекомендуется для квадрокоптеров модели Beta 75X.
Очень легкий вес, двигатели также имеют небольшие размеры и не сильно увеличивают конечный вес вашего дрона.Благодаря специальной липо-аккумуляторной батарее 3S двигатели работают на высоких скоростях и обеспечивают вашему дрону мощный взлет и скорость движения.
Подробные спецификации:
- Весит около 3,5 граммов на штуку
- Каждая часть имеет размер 13,5 дюймов в длину и 16,3 мм в ширину.
- Высота около 14 мм.
- Имеет трехконтактный штекер Micro JST 1.25, упрощающий установку.
- Подходит для больших пропеллеров от 1,2 до 2 дюймов.К ним относятся винты 1735, 1935, 2030 и 3020.
- Толстый кабель, который не порвется легко
- Beta 75X Frame
- Длина вала 1,5 мм
- Диаметр отверстий для крепления двигателя около 8,5 мм
- Номинальное напряжение 8000 об / мин / кВ при частоте вращения
Что нам понравилось об этом
- Очень большое номинальное значение частоты вращения / напряжения.
- Поставляется с более длинными проводами двигателя, что делает его идеальным для дронов с зубочистками
- Отличное качество сборки
- Маленький и легкий
Что нам не понравилось в нем
- Не совсем универсальная совместимость .
Купите сейчас на Amazon
5. Бесщеточный двигатель HglrcНАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УЗНАТЬ ЦЕНУ
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет комплект бесщеточного двигателя HGLRC. HGLRC Blue 1407 — это набор из 4 бесщеточных двигателей, созданный для гоночных квадрокоптеров с дронами.
Обладая очень интересной цветовой схемой, двигатели синего цвета (также доступны в пурпурной цветовой схеме) имеют умеренное номинальное напряжение, но поддерживают батареи как 3S, так и 4S.
Двигатели отличаются высокой прочностью и изготовлены из валов из нержавеющей стали. Колокол двигателя может всасывать холодный воздух через змеевик и основание, а затем позволять двигателю раскручиваться в течение более длительного времени с более высокой эффективностью.
Подробные спецификации
- Среднее номинальное напряжение 3600 об / мин / кВ
- 14 граммов веса по отдельности
- Диаметр 14 мм при длине 7 мм и внешний вал диаметром 5 мм
- Архитектура 9N12P, используемая в сборке
- Поддерживает липо-аккумуляторы 3S и 4S
- CCW резьба
- Поддерживает 3-дюймовые стойки для посадки
Что нам понравилось в этом
- Низкий уровень шума при работе
- Увеличенная продолжительность полета
- Отличная схема дизайна
Что нам в нем не понравилось
Купить сейчас на Amazon
6.Бесколлекторный двигатель Tamiya с дистанционным управлениемНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет Tamiya 54611, японский импортный бесщеточный двигатель. TBLM-02S — это бесщеточный двигатель емкостью 10,5 т, совместимый с батареями 2S.
Двигатель не поставляется с сенсорным проводом, но имеет хорошо развитую сенсорную систему. Он поставляется с выводами 12 AWG, которые припаяны к концу корпуса двигателя. Это делает его идеальным для квадрокоптеров, таких как XV-01 TC Pro и аналогичных конструкций.
Подробные спецификации
- 12 AWG, припаянные к канистрам
- Имеет номинальное напряжение около 3700 об / мин / кВ
- Регулируемое время
- Стандартные разъемы Tamiya, доступные с дизайном
- 2S Lipo аккумулятор, совместимый с ними.
Что нам в нем нравится
- Отличная стоимость бренда
- Модель «все в одном», готовая к подключению и игре
- Японское качество сборки
Что нам не понравилось в нем
- Меньшая батарея номинальная совместимость 2S
- Может иметь более высокое номинальное напряжение
- Не так много литературы по продукту, чтобы понять это дальше
Купить сейчас на Amazon
7.Бесщеточный двигатель HonorallНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет бесщеточный двигатель Honorall. Бесщеточный двигатель отличается высоким крутящим моментом, 12 пазами и 14 полюсами.
Этот бесщеточный двигатель идеально подходит для использования в радиоуправляемых автомобилях, самолетах, дронах и других небольших домашних проектах. Двигатель обеспечивает отсутствие нагрева с помощью алюминиевого радиатора.
Двигатель работает плавно и развивает максимальные обороты, поэтому дрон может мгновенно взлететь.Кроме того, двигатель был спроектирован с высокой точностью, чтобы обеспечить максимальное преобразование энергии.
Подробные спецификации
- Каждый двигатель весит 28,7 грамма
- Высота 28 мм и ширина 22 мм
- Номинальный ток 13 А
- Номинальное напряжение 1400 об / мин / КВ
- Подключается с использованием золотого бананового разъема 3,5 мм
- 6, обработанного на станке с ЧПУ 6061 Заготовка алюминиевого радиатора может.
- Увеличенные подшипники ABEC5 для высоких оборотов.
Что нам понравилось в этом
- Более продолжительное время работы радиоуправляемых машин и самолетов
- Создает высокий крутящий момент
- Плавная работа
- Максимальное преобразование энергии
- Предотвращает нагревание и повышает эффективность
Вещи, которые мы не понравилось
- Heavy, замедляющая радиоуправляемые машины и самолеты
Купить сейчас на Amazon
8.Бесколлекторные двигатели ReadytoskyНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Readytosky 2212 — бесщеточный двигатель низкого напряжения, разработанный для F330, X525, F450, S500, F500 и S550 DJI Phant квадрокоптеры.
Самое лучшее в двигателях — это то, что они в основном универсально совместимы по своей природе и имеют отверстие для установки нескольких групп, которое помогает поддерживать совместимость с несколькими дронами. Для частоты вращения он имеет скудное номинальное напряжение 920 кВ.
Для компенсации низкого номинального напряжения двигатели имеют очень низкий уровень шума и высокую стабильность работы. Низкий уровень шума достигается благодаря строгим испытаниям на динамическую балансировку, которые проводились во время испытаний. Стабильность достигается благодаря новой конструкции седла рабочего колеса
Подробные характеристики
- Имеет приличный внешний диаметр 28 мм
- Высота 24 мм (без вала)
- 920 об / мин / кВ номинальное напряжение.
- Направление вращения левой резьбы
Что нам понравилось в нем
- Стабильная производительность
- Низкий уровень шума
- Продукт тщательно протестирован
- Отличное качество сборки и
- Высокие отзывы и оценки
нам это не понравилось
- Низкие обороты на номинальное напряжение
Купить сейчас на Amazon
9.Бесщеточный двигатель GoolrcНАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УЗНАТЬ ЦЕНУ
Прочтите отзывы клиентов здесь
Следующим в списке идет GoolRC 2435, мощный бесщеточный двигатель со скоростью 4800 об / мин / кВ. Хотя большинство бесщеточных двигателей, упомянутых в списке, созданы для квадрокоптеров, этот также предназначен для радиоуправляемых машин и грузовиков. Двигатель рассчитан на ток 25 ампер.
Этот 4-полюсный двигатель имеет конструкцию с 12 шлицами для высокого крутящего момента. Двигатель также имеет алюминиевый радиатор из заготовок 6061 T6 CNC для уменьшения выделяемого тепла.Высокая мощность вращения также подходит для подшипников ABEC5 увеличенного размера.
Подробные спецификации
- Максимальная мощность 300 Вт
- Электрический регулятор скорости в качестве дополнения к упаковке
- Банка диаметром 24 мм, длиной 35 мм
- Диаметр вала 2 мм при длине 12 мм
- Пуля 3,5 мм разъем
- 58,3 грамма вес
Что нам понравилось в нем
- Максимальный ток.
- Рейтинг дроссельной заслонки с быстрым откликом
- Высокие обороты на КВ
Вещи, которые нам не нравились
- Отсутствие эстетичного дизайна
- Может улучшить качество сборки
Купить сейчас на Amazon
10.Бесщеточный двигатель Hobbywing
НАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Наконец, в нашем списке находится мощный бесщеточный двигатель от Hobbywing. Hobbywing 38010201 Max10 SCT также оснащен вентилятором с электрической регулировкой скорости.
38010201 Max10 SCT, хотя и идет на высокой скорости, имеет значительный вес — около 105 граммов. Он поддерживает программный блок со светодиодной подсветкой, а также программный блок с ЖК-экраном. Но что касается веса, он также имеет большие размеры.
Подробные спецификации
- Пиковый ток при 120 или 830 А
- Поддержка никель-металлгидридных батарей 2S, 3S и 4S
- Выход BEC можно переключать между 6 В и 7,4 В
- Длина 49 мм, ширина 39,5 мм
- Диаметр 34,7 мм
- Диаметр вала 5 мм
- Номинальное напряжение 4000 об / мин / В
Что нам понравилось в нем
- Отлично подходит как для радиоуправляемых автомобилей, грузовиков и квадрокоптеров
- Работа в тяжелых условиях
- Мультиустройство поддержка
Что нам в нем не понравилось
- Немного тяжелый для квадрокоптеров небольшого размера
Купить сейчас на Amazon
Основная информация о бесщеточных двигателяхЭто специализированный тип двигателя постоянного тока в основном без каких-либо изнашиваемых компонентов, так как у него не будет щеток.Он бывает двух типов — бегущие и опускающиеся. Их легко отличить по расположению помещенного в них магнита.
- Рабочие колеса: Магнит расположен внутри сердечника двигателя. Этот тип двигателя обычно используется в приложениях, где требуется высокая частота вращения, например, в высокоскоростных самолетах или модельных реактивных самолетах. При такой работе с высокими оборотами можно получить меньший крутящий момент на более низких скоростях. В двигателях Inrunners вал вращается внутри внешнего корпуса, и они используются в вертолетах RC.
- Out-runners: Магниты в этом outrunner расположены во внешнем корпусе. Его двигатель обычно вращается на более низких оборотах, так как он создает больший крутящий момент на низких скоростях. Он лучше всего подходит для самолетов с прямым приводом, таких как квадрокоптеры. В этих бегунах двигатель будет прикреплен к гребному винту, валу или обоим во всем внешнем корпусе и вращается вокруг центра.
Обмотки и постоянные магниты будут работать вместе в двигателе, создавая движущую силу с помощью магнитных полей.Это достигается простым переключением тока через провода статора, по которым протекает электрический ток, и, таким образом, создается ситуация, в которой магнитные поля внутри двигателей не выровнены.
Так же, как подковообразный магнит, магнитные поля будут оказывать большое давление для эффективного выравнивания. Этот процесс создает крутящий момент и, таким образом, позволяет двигателю вращаться или вращаться. Электронный контроллер скорости (ESC) будет определять вращательное движение (RPM) и, таким образом, управлять потоком тока, позволяя ему генерировать необходимое магнитное поле.
Каковы основные компоненты этих бесщеточных двигателей постоянного тока?В общем, бесщеточные двигатели постоянного тока будут состоять из 4 основных компонентов. Это статоры, постоянные магниты, корпус двигателя и вал двигателя. Расскажите о них подробно, прежде чем покупать и использовать.
1. СтаторыЭто три цепи с очень тонкими и длинными проводами, намотанными по кругу вокруг внутреннего сердечника двигателя. Для защиты этого провода от короткого замыкания он покрыт эмалью.Обычно, когда ток течет по проводу, он создает магнитное поле. Если провод обвести вокруг себя, то магнитное поле усиливается. Таким образом, чем больше ток, тем больше напряженность магнитного поля и, таким образом, от двигателя создается больший крутящий момент.
Чем больше ток, тем больше тепла будет происходить и, следовательно, расплавится эмалевое покрытие, что приведет к короткому замыканию и возгоранию двигателя. Если вам нужна более высокая мощность, вам нужно искать двигатели с обмоткой из более толстых проводов, которые производят больше электрического тока за счет меньшего количества тепла.От того, как построен этот статор, зависит производительность двигателя.
2. Постоянные магнитыРоторная часть этого двигателя сделана с постоянными магнитами для создания фиксированного магнитного поля, которое аналогично создается набором редкоземельных магнитов или подковообразных магнитов. Магниты приклеены к внешнему корпусу двигателя с помощью эпоксидной смолы в двигателях с внешними направляющими, тогда как магниты закреплены во внутреннем корпусе двигателя в двигателях с внутренними направляющими.
3. Кожух двигателяКожух двигателя сделан из легкого алюминиевого металла и используется для защиты обмоток и магнитов.В некоторых продвинутых моделях двигатель содержит специально разработанные корпуса, такие как миниатюрные вентиляторы, которые позволяют воздуху проходить через обмотки двигателя, пока двигатель вращается, охлаждая его и позволяя создавать больше мощности для эффективного функционирования.
4. Вал двигателяВал двигателя прикреплен к вращающейся части на внешнем кожухе в наружной направляющей. Он действует как рабочий компонент двигателя, передавая крутящий момент, создаваемый двигателем, на гребной винт.
Как выбрать лучший бесщеточный двигатель?Выбор бесщеточного двигателя для радиоуправляемого самолета, квадрокоптера или игрушек — довольно сложный процесс.Итак, чтобы получить четкое представление о том, как выбрать лучший, вы должны знать, какие факторы следует учитывать перед покупкой этих двигателей BLDC.
Вот некоторые ключевые факторы, которые следует проверить перед покупкой. Посмотри на это.
1. Размер двигателя:Необходимо определить размер двигателя, прежде чем они собираются покупать или использовать его. Чаще всего производители используют стандартную схему наименования двигателей из 4-значного числа. Например, двигатель с названием 2205, в котором первые 2 цифры представляют диаметр статора (в мм).Последние 2 цифры обозначают высоту (в мм).
Если одна из этих двух цифр больше, то двигатель будет обрабатывать большую мощность и, таким образом, будет генерировать больший крутящий момент. Если компромисс между большим числом, то это называется более тяжелый / больший двигатель.
Ознакомьтесь с некоторыми из наиболее часто используемых типоразмеров двигателей.
- 1806 — Довольно часто используется в мини-квадрокоптерах, которые вращаются с 3-дюймовыми или 4-дюймовыми пропеллерами.
- 2204 — Этот двигатель пользуется популярностью в течение длительного времени до 2015 года, но в наши дни встречается редко.Он использует 5-дюймовые пропеллеры.
- 2205 — Самый маленький и популярный типоразмер двигателя в наши дни. Вы должны использовать его с 5-дюймовыми стойками с тройным лезвием.
- 2206 — Чтобы выиграть в войне за тягу, большинство производителей начали увеличивать размер своих двигателей, используя дуговые магниты N52. Таким образом, это приводит к увеличению тяги на 15% (примерно).
- 2207/2407 — Эти двигатели 2407 и 2207 встречаются редко, так как они производятся для создания тяги более чем на 50% выше по сравнению с двигателями типа 2206.
Скорость двигателя зависит от скорости, с которой вам нужен самолет или игрушка. Итак, чтобы сравнить скорость двигателя, вам нужно искать номер KV. Этот киловольт равен оборотам на вольт. Он объясняет, сколько раз двигатель повернется на каждый вольт. Если напряжение увеличивается, двигатель будет быстро вращаться.
Все двигатели будут иметь номинальное значение KV, и этот рейтинг будет определять скорость вращения двигателя гребным винтом.Максимальная частота вращения двигателя определяется простым умножением значения KV на напряжение аккумулятора. Например, у вашего двигателя 2300 кВ, и устройство будет летать с батареей 4S LiPo, тогда двигатель вращается со скоростью 14,8 X2300 = 34040 об / мин.
Здесь мы приводим некоторые рекомендации / справочные сведения о том, насколько эффективно ваш двигатель будет работать с выбранным гребным винтом.
- Двигатель будет работать на 2600 кВ и более с винтами диаметром 4 дюйма.
- Для 5-дюймовых гребных винтов двигатель работает от 2300 — 2600 кВ.
- Пропеллеры с 6-дюймовым диаметром заставят устройство работать на двигателе с мощностью 2300 кВ или меньше
В общем, тяга пропорциональна мощности. Итак, чтобы увеличить мощность, которую принимает двигатель, вы должны следовать несколькими способами.
Выберите двигатель с высокой постоянной частотой вращения, равной укорочению всех обмоток. Это снижает электрическое сопротивление и увеличивает количество тока, протекающего через них, и тем самым обеспечивает уменьшающуюся отдачу.Когда обмотки становятся короче, создается меньшая магнитная сила с большим нагревом. Таким образом, он влияет на способность двигателя преобразовывать электрическую мощность в КПД или крутящий момент.
Чтобы повысить эффективность двигателя при передаче большего количества энергии, просто увеличьте количество меди в обмотках или просто добавив больше обмоток. Снова уменьшите электрическое сопротивление обмоток, чтобы пропустить больше мощности / тока. Большее количество меди в обмотке приводит к большему весу, и двигатели, которые набиты обмотками, должны либо увеличивать размер двигателя, либо ухудшать структуру статора.В большинстве случаев размер двигателя будет увеличиваться, и поэтому большие двигатели могут легко создавать большую тягу.
Тип постоянного магнита, используемого в двигателе BLDC, создает сильное магнитное поле для работы обмоток и тем самым увеличивает мощность. Эта концепция использовалась до тех пор, пока производители не начали использовать магниты N52 в своих двигателях, и это изменение привело к мгновенному увеличению мощности примерно на 25% при сравнении двигателей с другими магнитами.
4. Дуговые магниты:Зазор между постоянными магнитами, приклеенными к статору и колоколу, также влияет на мощность.Небольшие сокращения пространства между источниками двух магнитных полей повлияют на то, сколько силы магниты могут оказывать друг на друга. Это называется воздушным зазором двигателя.
Итак, чтобы решить эту проблему, большинство производителей улучшают ее, просто превращая постоянные магниты в дугообразные. Эти дуговые магниты уменьшают воздушный зазор между магнитом и статором (менее 1 мм) и тем самым улучшают характеристики.
5. Вал двигателя:Нельзя игнорировать длину и размер вала двигателя.В основном люди выбирают двигатель с валом 5 мм, потому что это идеальный диаметр отверстия. В случае, если вы хотите получить двигатель с маленьким валом, просто установите на стойки переходник размера вала. Для вала большего размера необходимо просверлить отверстие большего размера на гребном винте.
Также убедитесь, что размер вала соответствует стойке и контргайке. Итак, двигатель должен иметь вал необходимой длины. Например, вал длиной не менее 13 мм, а затем короче, будет работать, чтобы действительно затянуть гайки, чтобы они были плотно затянуты во время полета, и тем самым приведет к обрыву резьбы.
6. Мощность:Мощность двигателя указывается в ваттах (Вт), которые измеряются как напряжение х амперы. Чем выше мощность, тем мощнее двигатель. Обязательно проверьте, сколько ампер может потреблять двигатель, чтобы найти правильный электронный регулятор скорости (ESC). Использование ESC, который как минимум на 20% больше, заставит двигатель работать эффективно. В случае, если двигатель тянет 20А, а затем использовать регулятор скорости 30А, все будет нормально.
7.Тяга:Нужно знать, какую тягу будет производить их двигатель с различными комбинациями гребного винта и аккумулятора. Это поможет подобрать двигатель идеального размера для вашего проекта. Например, если вы ищете модель с весом 2 фунта, выберите двигатель, обеспечивающий тягу более 2 фунтов.
8. Электронный контроллер скорости (ESC):ESC используется для управления движением или скоростью бесщеточного двигателя путем простого включения полевых МОП-транзисторов, чтобы создать вращающееся магнитное поле и тем самым позволить двигателю вращаться.Чем выше частота или быстрее ESC, который выполняется через 6 интервалов, тем выше будет скорость двигателя.
Вы должны знать, когда активировать правильную фазу, и для этого вам необходимо знать положение ротора, при котором его положение будет определяться двумя общими методами.
- Первый метод — В роторе используются датчики на эффекте Холла, которые определяют магнитное поле, встроенное в статор (расположенное под углом 120–160 градусов друг к другу), и генерируют высокий уровень для одного магнитного полюса и низкий для другого, противоположного полюса.Обладая этой информацией, ESC будет знать, когда активировать последовательность коммутации.
- Второй метод — Здесь значение обратной электродвижущей силы или обратной ЭДС используется для определения положения ротора. Эта ЭДС является результатом генерации магнитного поля прямо противоположного процесса. Или просто изменение магнитного поля, которое проходит через катушку, вызовет в катушке ток. Таким образом, это вызовет ток в катушке и тем самым приведет к падению напряжения в катушке.ESC фиксирует падения напряжения и, таким образом, предсказывает, когда должен активироваться следующий интервал.
Наконец, это основной принцип работы этих двигателей BLDC и ESC, и он остается неизменным даже при увеличении числа полюсов как статора, так и ротора. Для трехфазного двигателя количество интервалов увеличивается для завершения цикла.
9. Вес:Бесщеточные двигатели для мини-квадроциклов должны иметь как минимум четыре, и каждый грамм должен экономить на двигателе и умножается на четыре.Таким образом, более тяжелый двигатель будет производить больше мощности и тем самым легко компенсировать их вес.
10. Цена:Цена продукта определяет его качество и эффективность двигателя. Чтобы купить бесщеточный двигатель лучшего качества, нужно потратить не менее 10-25 долларов на их моторы. Также нужно искать гарантию производителя на этот продукт.
Преимущества бесщеточных двигателей:Бесщеточные двигатели постоянного тока коммутируются электронным способом и не используют щетки для коммутации.Он обладает рядом преимуществ по сравнению с традиционными щеточными двигателями постоянного тока. Некоторые из них упомянуты ниже.
- Он может работать на высоких скоростях до 100 000 об / мин, а не на щеточных двигателях с высокой частотой вращения 20 000 об / мин.
- Он имеет более длительный срок службы — около 10 000 часов работы.
- Однако в этом двигателе нет изнашиваемых деталей, за исключением подшипников, и поэтому этот двигатель BLDC требует меньше обслуживания.
- Они эффективны, надежны и долговечны.
- Его двигатель будет работать на высоких скоростях, поэтому он лучше всего подходит для вентиляторов, шлифовальных машин, удаленных автомобилей, квадрокоптеров и пил.
- Эти двигатели BLDC систематически оснащены энкодером, который позволяет определять положение ротора и электронное переключение. Таким образом, он идеально подходит для приложений с высокой точностью серводвигателя.
Этот двигатель с BLDC имеет некоторые недостатки, о которых говорится ниже.
- Управление двигателем без регулятора затруднено.
- Для приводов требуются специализированные редукторы и низкие пусковые нагрузки, что усложняет задачу.
- Он стоит дороже, чем щеточные или другие типы двигателей постоянного тока, почему, потому что важно интегрировать контроллер, контроллер переключения.
Эту разницу между щеточными и бесщеточными двигателями легко найти.Щеточные двигатели используют щеточные варианты, которые сделаны из углерода, тогда как бесщеточный двигатель генерирует мощность с помощью магнитов. По этой причине бесщеточные двигатели адаптированы должным образом, выделяют меньше тепла, создают меньшее трение или отсутствие трения и, таким образом, обеспечивают наилучшую производительность.
2. Как определить, щеточный или бесщеточный двигатель?
Все, что вам нужно, это измерить сопротивление вашего двигателя при низком напряжении около 100 мВ. Хотя большинство цифровых мультиметров работают, но если сопротивление превышает несколько килоом, то это, вероятно, бесщеточный двигатель.В случае, если сопротивление ниже 100 Ом, то щеткой.
3. Где используются эти бесщеточные двигатели постоянного тока?
Бесщеточные двигатели могут использоваться в различных приложениях, таких как дроны, дистанционные радиоуправляемые машины, вентиляторы, станки с ЧПУ, мини-квадрокоптеры и промышленные роботы. Наряду с этим, их можно использовать в различных приложениях, таких как приложения с регулируемой скоростью, управление положением, приложения с высокой скоростью и приложения с низким уровнем шума в областях автомобильной промышленности, потребительских приложений, промышленной автоматизации, медицины и химии, а также аэрокосмической промышленности и контрольно-измерительных приборов
ЗаключениеБесщеточный двигатель имеет значительно более высокий КПД, чем щеточный двигатель, поэтому большинство воинов дронов предпочитают строить свои квадрокоптеры с использованием бесщеточного двигателя.
Из всех перечисленных бесщеточных двигателей выделяется бесщеточная силовая установка Traxxas . Благодаря большой выходной мощности, номинальному напряжению 3500 об / мин / В, монтажной пластине для регулировки скорости, 3-х приводному электрическому регулированию скорости и ограниченным возможностям дроссельной заслонки, это лучший бесщеточный двигатель для обоих; начинающие и опытные любители дронов. Кроме того, конструкция двигателя является водонепроницаемой, а также имеет впечатляющий обзор и оценку.
Хотя это были наши выборы, мы заинтригованы вашими мыслями и мнениями.Что вы думаете о нашем списке? Вы имели в виду какой-нибудь бесщеточный двигатель, который мы упустили? Или у вас есть вопросы по дронам и квадрокоптерам? Если это так, не стесняйтесь писать нам в разделе комментариев ниже, и наша команда ответит вам как можно скорее.
Что такое бесщеточный двигатель: подробное руководство
РАСКРЫТИЕ ИНФОРМАЦИИ: НАСТОЯЩИЙ ПОСТ МОЖЕТ СОДЕРЖАТЬ ПАРТНЕРСКИЕ ССЫЛКИ, ЭТО ЗНАЧИТ, что Я ПОЛУЧАЮ КОМИССИЮ, ЕСЛИ ВЫ РЕШИЛИ БЕСПЛАТНО СДЕЛАТЬ ПОКУПКУ ПО МОИМ ССЫЛКАМ.ПОЖАЛУЙСТА, ПРОЧИТАЙТЕ МОЙ ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ ДЛЯ БОЛЕЕ ПОДРОБНОЙ ИНФОРМАЦИИ.
При покупке инструмента вы можете увидеть рекламу «бесщеточного двигателя» инструмента. Хотя знать, что это означает, не обязательно, но я думаю, что знать, что вы покупаете, полезно.
Бесщеточные двигатели сегодня повсюду. Есть причина, по которой компании, производящие инструменты, производят с их помощью больше продукции. Вы можете найти их в аккумуляторных дрелях, ударных отвертках, перфораторах и т. Д. Вот все, что вам нужно знать о бесщеточных двигателях, прежде чем покупать следующий электроинструмент.
Что такое бесщеточный двигатель?
В механическом мире электродвигателей есть щеточные и бесщеточные двигатели переменного тока (AC) или постоянного тока (DC). Как следует из названия, бесщеточные двигатели не имеют щеток и используют электричество постоянного тока для питания. Эта конструкция дает несколько преимуществ.
Моторыс щеточным покрытием используются с начала 1900-х годов, а первые бесщеточные электродвигатели были наплавлены примерно в 1960-х годах. Производители двигателей искали решение для повышения мощности стационарного крутящего момента при одновременном снижении общего износа (оба очень полезны для электроинструментов).Этот улучшенный дизайн постепенно стал использоваться в доступных инструментах таких брендов, как Ryobi и Milwaukee Tool.
Как работает бесщеточный двигатель?
Этот раздел представляет собой краткий обзор и может несколько сбить с толку, но я постараюсь описать, как это работает.
Если у вас есть какие-либо предварительные знания о двигателях постоянного тока, вы можете знать, что щетки в щеточных двигателях служат для подачи электричества к медным катушкам двигателя. Поскольку у бесщеточных двигателей нет компонентов на коллекторе, нет необходимости обслуживать или заменять какие-либо щетки и другие электрические элементы.
Бесщеточный двигатель имеет ротор, содержащий постоянные магниты, и это важно, учитывая отсутствие электрических контактов, как мы упоминали выше. Его статор снабжен электромагнитами, покрытыми обмотками и катушками.
Поскольку бесщеточный двигатель может иметь как ротор, так и статор с электромагнитами, он может создавать гораздо более сильное магнитное поле, чем щеточные двигатели . В результате бесщеточные двигатели имеют более высокую удельную механическую мощность, что позволяет им создавать более высокий крутящий момент в неподвижном состоянии.
Постоянные магниты внутри ротора притягиваются к электромагнитам, не вступая в контакт. Когда электричество течет в катушку, противоположные полюса статора и ротора притягиваются друг к другу. Каждый раз, когда ротор приближается к катушке, электричество переходит к следующей катушке и так далее, и тому подобное. Внутренний датчик и электронный контроллер контролируют этот процесс.
Общие сведения о различных типах бесщеточных двигателей
По сути, существует два различных типа бесщеточных двигателей: двигатели с внешним ротором и двигатели с внутренним ротором .Оба мотора работают по одним и тем же принципам, но различаются по конструкции.
Двигатели с внешним ротором
Конструкция двигателя с внешним ротором, вероятно, является наиболее сложной из двух. В этом двигателе обмотка находится внутри ротора и опирается на сердечник двигателя. Каждый из магнитов в роторе отвечает за улавливание тепла, которое не рассеивает энергию. Двигатели с внешним ротором обычно имеют более низкий крутящий момент и могут работать при более низком номинальном токе.
Двигатели с внутренним ротором
В отличие от двигателя с внешним ротором, этот двигатель имеет ротор внутри двигателя с обмоткой статора вокруг него.Поскольку ротор находится в сердечнике двигателя, магниты не изолируют тепло, которое довольно быстро рассеивается. В результате двигатели с внутренним ротором создают мощный крутящий момент, что делает их популярным выбором среди производителей инструментов.
Для чего используются бесщеточные двигатели?
Поскольку бесщеточные двигатели имеют более высокий КПД, чем щеточные, они намного более удобны. Щетки изнашиваются, вызывают потенциально опасные искры и имеют более короткий срок службы. В результате вы, вероятно, найдете бесщеточные двигатели в большинстве современных устройств, которые требуют небольшого шума и тепла (электроинструменты, стиральные машины, кондиционеры и т. Д.).)
Некоторые компании даже используют их для питания сервисных роботов. Однако этот процесс требует большего контроля по соображениям безопасности. Без сомнения, бесщеточные двигатели имеют несколько преимуществ (следите за обновлениями), и именно поэтому они используются в подавляющем большинстве бытовых устройств.
Они не только подходят для персональных устройств, но и находят применение в более промышленных рабочих средах. Бесщеточные двигатели будут полезны до тех пор, пока существует потребность в меньшем количестве шума, отсутствии нагрева и минимальном обслуживании.
Размеры бесщеточного двигателя
Бесщеточные двигатели бывают разных форм и размеров. Если вы планируете его приобрести, важно знать каждый размер и для чего он подходит. К сожалению, производители бесщеточных двигателей не очень изобретательны, когда дело доходит до наименования различных размеров, поэтому вам придется полагаться на четырехзначную систему. Вот разбивка каждого размера:
- 1806 : Эти двигатели обычно представляют собой мини-квадроциклы, которые содержат 3–4-дюймовые пропеллеры.
- 2204 : 2204 раньше был одним из самых популярных типоразмеров на рынке. В настоящее время их редко можно увидеть. Эти моторы содержат 5-дюймовые пропеллеры.
- 2205 : это самый компактный бесщеточный двигатель на рынке. 2205 компактен и прост в установке в бытовые устройства.
- 2206 : 2206 должен добавить дополнительную тягу. Теперь производители могут добавлять дополнительные 15% тяги при использовании этих бесщеточных двигателей.
- 2407 : Это «все, и все» для возможностей тяги.Если вас не устраивает тяга 2206, то 2407 наверняка подойдет.
А размер намотки?
Согласно общему правилу механики двигателей, тяга пропорциональна мощности. Если мотор получает больше энергии от источника питания (аккумулятора), у вас будет более мощное устройство. Вы можете сделать некоторые вещи, чтобы увеличить мощность, которую вы получаете с помощью бесщеточного двигателя, и самый простой — получить двигатель с более высокой частотой вращения.
Двигатели с более высокой частотой вращения имеют более короткие обмотки, что снижает сопротивление и значительно увеличивает текущую мощность.Однако по мере того, как обмотки становятся короче, вам придется пожертвовать крутящим моментом и теплом. Вы можете принять столько энергии, прежде чем начнете терять эффективность.
Если вы хотите увеличить мощность без ущерба для эффективности, добавьте больше обмоток. Вы также можете попробовать добавить в обмотки больше меди для большей проводимости. Этот процесс снижает электрическое сопротивление и позволяет большему току проходить через двигатель. Однако чем больше вы добавите меди и обмоток, тем тяжелее будет двигатель.
Кстати, добавление дополнительных компонентов к вашему двигателю может поставить под угрозу его конструкцию. Вы можете повредить статор, что сделает ваш двигатель менее эффективным. Имея это в виду, добавить больше мощности к вашему мотору — неплохая идея. Вам нужно только убедиться, что вы нашли правильный баланс, прежде чем терять эффективность.
Электронный регулятор скорости (ECS)
ECS отвечает за управление скоростью двигателя. Это жизненно важная часть вашего бесщеточного двигателя, поэтому разумно понять, как он работает.Проще говоря, чем быстрее ECS, тем быстрее двигатель.
ECS, по сути, контролирует мощность магнитного соединения. Следовательно, вы можете использовать его для ускорения или замедления мотора. Этот сложный электронный регулятор скорости — одна из нескольких причин, по которым бесщеточные двигатели являются лучшим вариантом. У других обычных двигателей нет точного способа управления скоростью, что ограничивает их функции.
Преимущества
Выше мы упоминали, что бесщеточные двигатели постоянного тока имеют ряд преимуществ перед обычными щеточными двигателями.Некоторые из значительных преимуществ включают:
- Поскольку бесщеточные двигатели не имеют щеток, отпадает необходимость в дорогостоящем техническом обслуживании и замене щеток.
- Бесщеточные двигатели постоянного тока более эффективны, чем щеточные двигатели. Более высокая эффективность заключается в том, что бесщеточные двигатели имеют больший контроль скорости благодаря внутреннему электронному контроллеру и датчику.
- Бесщеточные двигатели постоянного тока имеют более длительный срок службы. В среднем они прослужат примерно в шесть раз дольше, чем традиционный щеточный мотор.
- Поскольку щеток нет, искры встречаются реже или отсутствуют. Искры могут быть потенциально опасными, если вы работаете с бензином или другими легковоспламеняющимися веществами.
- Они компактны, легки и могут обеспечить впечатляющий крутящий момент.
- Производят меньше шума при работе, чем другие традиционные двигатели постоянного тока. В результате они отлично подходят для бытовых устройств, таких как компьютеры, стиральные машины и кондиционеры.
Преимущества использования бесщеточного двигателя намного перевешивают недостатки, но они идеальны.Хотя эти двигатели идеально подходят для нескольких различных устройств, у них есть несколько недостатков, которые описаны ниже.
Недостатки
- Они могут быть дороже щеточных и традиционных двигателей.
- Когда двигатель работает на малых оборотах, вибрации могут быть немного интенсивными. Однако как только скорость увеличивается, вибрация начинает уходить.
FAQ
Как долго они служат?
Нет сомнений в том, что бесщеточные двигатели имеют один из самых продленных срок службы.Любой стандартный бесщеточный двигатель должен прослужить вам десятки тысяч часов. Для сравнения: если вам повезет, щеточный двигатель прослужит от 1000 до 3000 часов. Более длительный срок службы обусловлен отсутствием износа щеток во время работы двигателя.
Почему бесщеточные двигатели такие дорогие?
Есть несколько причин более высокой цены. Многие думают, что щеточный двигатель будет дороже, учитывая, что у него гораздо более сложный процесс сборки и дизайна.Однако бесщеточные двигатели содержат высококачественные компоненты, такие как электромагниты премиум-класса, датчики и электронные контроллеры. Поэтому они дороже.
Водонепроницаемы ли бесщеточные двигатели?
Короче нет, они не водонепроницаемы. Общая конструкция двигателя водонепроницаема, но слишком много металлических компонентов подвержены коррозии при продолжительном увлажнении. Если двигатель находится в воде слишком долго, подшипники изнашиваются и ржавеют, что ухудшает его работу.
Как контролировать скорость?
Вы можете использовать переменное напряжение для управления скоростью бесщеточного двигателя. Это также позволяет контролировать крутящий момент и другие характеристики двигателя.
Заключение
Должно быть понятно, почему все больше и больше инструментов и производителей используют бесщеточные двигатели для своих электродвигателей. Также становится все более доступным покупать эти инструменты, поскольку они теперь повсюду.
Хотя большая часть этой статьи не критична для вашей самостоятельной деятельности, неплохо иметь некоторые базовые знания об используемых вами инструментах.Это особенно полезно, когда вы решите отправиться в магазин за новыми инструментами.
Бессенсорное управление двигателем BLDC с Arduino — DIY ESC
/ * Бессенсорное бесщеточное управление двигателем постоянного тока (BLDC) с помощью Arduino UNO (Arduino DIY ESC).
* Это бесплатное программное обеспечение БЕЗ ГАРАНТИЙ.
* https://simple-circuit.com/
* /
#define SPEED_UP A0
#define SPEED_DOWN A1
#define PWM_MAX_DUTY 2553 9000_index_DUTY 255 9000_DIN
_DUTY 255 PWMбайт bldc_step = 0, motor_speed;
беззнаковое int i;
void setup () {
DDRD | = 0x38; // Настроить контакты 3, 4 и 5 как выходы
PORTD = 0x00;
DDRB | = 0x0E; // Настройте контакты 9, 10 и 11 как выходы
PORTB = 0x31;
// Настройка модуля Timer1: установите источник синхронизации на clkI / O / 1 (без предварительного масштабирования)
TCCR1A = 0;
TCCR1B = 0x01;
// Настройка модуля Timer2: установите источник синхронизации на clkI / O / 1 (без предварительного масштабирования)
TCCR2A = 0;
TCCR2B = 0x01;
// Настройка аналогового компаратора
ACSR = 0x10; // Отключить и сбросить (флаговый бит) прерывание аналогового компаратора
pinMode (SPEED_UP, INPUT_PULLUP);
pinMode (SPEED_DOWN, INPUT_PULLUP);
}
// Аналоговый компаратор ISR
ISR (ANALOG_COMP_vect) {
// BEMF debounce
for (i = 0; i <10; i ++) {
if (bldc_step & 1) if (
) {
(! (ACSR & 0x20)) i — = 1;
}
else {
if ((ACSR & 0x20)) i — = 1;
}
}
bldc_move ();
bldc_step ++;
bldc_step% = 6;
}
void bldc_move () {// Функция коммутации двигателя BLDC
switch (bldc_step) {
case 0:
AH_BL ();
BEMF_C_RISING ();
перерыв;
case 1:
AH_CL ();
BEMF_B_FALLING ();
перерыв;
case 2:
BH_CL ();
BEMF_A_RISING ();
перерыв;
case 3:
BH_AL ();
BEMF_C_FALLING ();
перерыв;
корпус 4:
CH_AL ();
BEMF_B_RISING ();
перерыв;
корпус 5:
CH_BL ();
BEMF_A_FALLING ();
перерыв;
}
}
void loop () {
SET_PWM_DUTY (PWM_START_DUTY); // Настройка запуска ШИМ с рабочим циклом = PWM_START_DUTY
i = 5000;
// Запуск двигателя
while (i> 100) {
delayMicroseconds (i);
bldc_move ();
bldc_step ++;
bldc_step% = 6;
i = i — 20;
}
motor_speed = PWM_START_DUTY;
ACSR | = 0x08; // Разрешение прерывания аналогового компаратора
while (1) {
while (! (DigitalRead (SPEED_UP)) && motor_speed
motor_speed ++;
SET_PWM_DUTY (скорость_двигателя);
задержка (100);
}
while (! (DigitalRead (SPEED_DOWN)) && motor_speed> PWM_MIN_DUTY) {
motor_speed—;
SET_PWM_DUTY (скорость_двигателя);
задержка (100);
}
}
}
void BEMF_A_RISING () {
ADCSRB = (0 << ACME); // Выбираем AIN1 в качестве отрицательного входа компаратора
ACSR | = 0x03; // Установить прерывание по нарастающему фронту
}
void BEMF_A_FALLING () {
ADCSRB = (0 << ACME); // Выбираем AIN1 в качестве отрицательного входа компаратора
ACSR & = ~ 0x01; // Установить прерывание по заднему фронту
}
void BEMF_B_RISING () {
ADCSRA = (0 << ADEN); // Отключить модуль АЦП
ADCSRB = (1 << ACME);
ADMUX = 2; // Выбираем аналоговый канал 2 в качестве отрицательного входа компаратора
ACSR | = 0x03;
}
void BEMF_B_FALLING () {
ADCSRA = (0 << ADEN); // Отключить модуль АЦП
ADCSRB = (1 << ACME);
ADMUX = 2; // Выбираем аналоговый канал 2 в качестве отрицательного входа компаратора
ACSR & = ~ 0x01;
}
void BEMF_C_RISING () {
ADCSRA = (0 << ADEN); // Отключить модуль АЦП
ADCSRB = (1 << ACME);
ADMUX = 3; // Выбираем аналоговый канал 3 в качестве отрицательного входа компаратора
ACSR | = 0x03;
}
void BEMF_C_FALLING () {
ADCSRA = (0 << ADEN); // Отключить модуль АЦП
ADCSRB = (1 << ACME);
ADMUX = 3; // Выбираем аналоговый канал 3 в качестве отрицательного входа компаратора
ACSR & = ~ 0x01;
}
void AH_BL () {
PORTB = 0x04;
PORTD & = ~ 0x18;
PORTD | = 0x20;
TCCR1A = 0; // Включаем вывод 11 (OC2A) ШИМ (вывод 9 и вывод 10 выключены)
TCCR2A = 0x81; //
}
void AH_CL () {
PORTB = 0x02;
PORTD & = ~ 0x18;
PORTD | = 0x20;
TCCR1A = 0; // Включите контакт 11 (OC2A) PWM (контакт 9 и контакт 10 выключите)
TCCR2A = 0x81; //
}
void BH_CL () {
PORTB = 0x02;
PORTD & = ~ 0x28;
PORTD | = 0x10;
TCCR2A = 0; // Включаем контакт 10 (OC1B) ШИМ (вывод 9 и вывод 11 выключены)
TCCR1A = 0x21; //
}
void BH_AL () {
PORTB = 0x08;
PORTD & = ~ 0x28;
PORTD | = 0x10;
TCCR2A = 0; // Включаем контакт 10 (OC1B) ШИМ (вывод 9 и вывод 11 выключены)
TCCR1A = 0x21; //
}
void CH_AL () {
PORTB = 0x08;
PORTD & = ~ 0x30;
PORTD | = 0x08;
TCCR2A = 0; // Включаем вывод 9 (OC1A) ШИМ (вывод 10 и вывод 11 выключены)
TCCR1A = 0x81; //
}
void CH_BL () {
PORTB = 0x04;
PORTD & = ~ 0x30;
PORTD | = 0x08;
TCCR2A = 0; // Включаем вывод 9 (OC1A) ШИМ (вывод 10 и вывод 11 выключены)
TCCR1A = 0x81; //
}
void SET_PWM_DUTY (байтовый долг) {
if (duty
duty = PWM_MIN_DUTY;
если (режим> PWM_MAX_DUTY)
режим = PWM_MAX_DUTY;
OCR1A = дежурный; // Установить рабочий цикл ШИМ вывода 9
OCR1B = duty; // Установить рабочий цикл ШИМ вывода 10
OCR2A = duty; // Установите рабочий цикл ШИМ вывода 11
}
Что такое бесщеточный двигатель / Бесщеточный или бесщеточный.Матовый мотор
В мире электроинструментов бесщеточные двигатели в моде. Хотя эта технология не совсем нова, в последние годы она приобрела популярность благодаря некоторым громким релизам Makita, Milwaukee, DeWalt и других.
🛠Вы любите ремонтировать. Мы любим чинить вещи. Давай сделаем это вместе.
«Бесщеточные двигатели используются с 1960-х годов, используются в промышленных и производственных приложениях для [двигателей, приводящих в движение] конвейерные ленты», — говорит Кристиан Кулис, старший вице-президент по управлению продуктами в Milwaukee Tools, Popular Mechanics .
Makita была первой компанией, которая применила их в электроинструментах. «[Это было] впервые в нашем сборочном подразделении в 2003 году для оборонной и аэрокосмической промышленности, а затем снова в 2009 году, когда мы выпустили бесщеточный трехскоростной ударный драйвер», — говорит Уэйн Харт, менеджер по коммуникациям Makita Pop Mech .
Производители заявляют, что бесщеточные инструменты повысили производительность и долговечность и что они умнее, чем средний инструмент. Так в чем же именно заключается технология, лежащая в основе этих новых двигателей?
Принцип работы щеточных двигателей старой школыТрадиционный щеточный двигатель состоит из четырех основных частей: угольных щеток, кольца магнитов, якоря и коммутатора.Магниты и щетки неподвижны, а якорь и коммутатор вращаются вместе на валу двигателя внутри магнитов.
Макита
Когда двигатель находится под напряжением, заряд проходит от батареи через щетки в коммутатор. (Щетки подпружинены для поддержания физического контакта с коммутатором.) Коммутатор затем передает заряд на якорь, который состоит из медных обмоток (они выглядят как пучки медных проводов).Обмотки намагничиваются зарядом и толкаются к неподвижному кольцу магнитов, которые его окружают, заставляя узел якоря вращаться. Вращение не прекращается, пока не прекратится заряд от аккумулятора.
Как работают бесщеточные двигателиВ бесщеточном двигателе отсутствуют щетки и коллектор. А расположение магнитов и обмоток поменялось местами: магниты находятся на валу обычного двигателя, а медные обмотки якоря закреплены и окружают вал.Вместо щеток и коммутатора небольшая печатная плата координирует подачу энергии к обмоткам.
Поскольку электроника напрямую взаимодействует со стационарными обмотками, инструмент настраивается в соответствии с задачей — вот почему компании продают их как «более умные» инструменты. Например, если вы используете бесщеточную дрель для ввинчивания шурупов в пенополистирол, она с большей готовностью определяет отсутствие сопротивления (по сравнению с щеточным двигателем) и начинает извлекать из аккумулятора только тот небольшой заряд, который ему нужен.Если затем инструмент начнет заворачивать 3-дюймовые винты в красное дерево, он соответствующим образом отрегулирует и потребляет больше тока. Напротив, щеточный двигатель всегда будет работать с максимальной скоростью во время использования.
Инструменты, необходимые для выполнения работы:
Дрель-шуруповерт DeWalt
DEWALT walmart.com369,52 долл. США
Сабельная пила Ridgid
Риджид амазонка.ком134,99 $
Угловая шлифовальная машина Makita
Макита amazon.com
Циркулярная пила Milwaukee
МИЛЬВОКИ amazon.com$ 383,90
Кроме того, бесщеточные двигатели могут быть в целом более мощными. Поскольку медные обмотки находятся снаружи двигателя, есть место для их увеличения.Бесщеточные двигатели также не имеют трения и падения напряжения, которые создают щетки при движении по вращающемуся коммутатору. Этот физический контакт приводит к постоянной потере энергии во время рабочего процесса.
Чистая прибыль — инструмент с большей эффективностью и более прочными двигателями. Само собой разумеется, что к концу года в каждом электроинструменте будет установлен бесщеточный двигатель, не так ли? «Это не шанс», — говорит Кулис из Милуоки.
«Хотя преимущества бесщеточной технологии огромны, производители сталкиваются с чрезвычайно высокими ценовыми барьерами из-за дополнительных затрат на двигатель и электронику, необходимых для правильного управления двигателем», — говорит она.Другими словами, они дороги, и поэтому бесщеточные двигатели лучше подходят для профессионалов, которые могут выложить большие деньги за инструмент, который они собираются использовать каждый день. Бесщеточные инструменты примерно на 30 процентов дороже в производстве, чем стандартные аккумуляторные инструменты, а батареи для их питания обычно недоступны для большинства домашних мастеров.
Но по мере совершенствования аккумуляторных технологий и совершенствования конструкции инструментов покупатели начнут видеть все больше и больше бесколлекторных инструментов в своих местных центрах.Они здесь, чтобы остаться, но, вероятно, пройдет некоторое время, прежде чем технология перейдет на все электроинструменты для домашних мастеров на выходных.
Смотреть это:
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты. Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
500 Вт 48 В электрический GoKart трехколесный велосипед тележка бесщеточный двигатель DIY редуктор BLDC Спорт на открытом воздухе спортивные товары
500 Вт 48 В электрический GoKart трехколесный велосипед тележка бесщеточный двигатель DIY редуктор BLDC
500W 48V Электрический трехколесный велосипед GoKart Бесщеточный двигатель DIY Gear Reduction BLDC, 48V Электрический GoKart Tricycle Cart Бесщеточный двигатель DIY GEAR Reduction BLDC 500W, Мотор с постоянным магнитом DIY Электрический двигатель E-Bike Scooter Велосипедный трехколесный велосипед Unite Motor, BM1418ZXF (BLDC), DIY трехколесный велосипед, Электровелосипеды, Электроскутеры, Совместимость со многими другими марками и моделями электросамокатов. Вот ваша самая идеальная цена. Сэкономьте 20% на первом заказе. Эксклюзивные, высококачественные вторичные рынки. Дешевая цена без забот, лучшее качество, легкий возврат.500W 48V Электрический трехколесный велосипед GoKart Бесщеточный двигатель DIY Gear Reduction BLDC bischoffdentistry.com.
500 Вт 48 В электрический GoKart трехколесный велосипед тележка бесщеточный двигатель DIY редуктор BLDC
Купите сумки на ремне DDSS — микрофибра, оставьте свои ожидания нам, мы позаботимся о том же, мужские шорты для плавания Reality And Ideals Mountain Erebor Mens Swim Trunks Board Shorts. Пакет: другие аксессуары не входят в комплект. Поскольку он склонен к потускнению, так как он естественным образом вступает в реакцию с серой или сероводородом в воздухе, формованная стелька из эва с антимикробной добавкой, разработанной для уменьшения количества бактерий, вызывающих запах. 500W 48V Электрический трехколесный велосипед GoKart Тележка Бесщеточный двигатель DIY GEAR Reduction BLDC , Купите ожерелье с подвеской Girl’s CZ «Dream Big Star». Мы являемся новым брендом и также высоко ценим услуги и продукты наших клиентов, предварительно усаженные для лучшей удобной современной посадки и ощущения. Дата первого упоминания: 14 января, женские мягкие пляжные шорты для плавания в пляжных шортах на Гавайях в магазине женской одежды. Наш широкий выбор предлагает бесплатную доставку и бесплатный возврат: 500W 48V Electric GoKart Трехколесный велосипед с тележкой Бесщеточный двигатель DIY GEAR Reduction BLDC .Купить 3dRose Taiche — Дизайн текста — День святого Патрика — Пусть шенаниганы начнутся День святого Паддиса — Футболки: покупайте футболки ведущих модных брендов с ✓ БЕСПЛАТНОЙ ДОСТАВКОЙ, возможен возврат при покупке, отвечающей критериям. обеспечивает максимальную безопасность ваших вещей, купите мужские повседневные облегающие эластичные брюки lovever Men без морщин. Мужские пляжные шорты Flying Paper Planes Летние плавки, дата первого упоминания: 8 декабря. Мы отследим доставку и ответим вам как можно скорее. 500W 48V Электрический трехколесный велосипед GoKart Бесщеточный двигатель DIY GEAR Reduction BLDC , кроссовки Lovers Slip On и другие модные кроссовки в, Этот медицинский браслет для удостоверения личности выгравирован на заказ и предварительно выгравирован.
500 Вт 48 В электрический GoKart трехколесный велосипед тележка бесщеточный двигатель DIY редуктор BLDC
ДОСТАВКА Mac Tools Средний черный футбольный джерси для взрослых $ 5,99, SKI DOO PPD OEM 4,250 «ВЕРХНЕЕ ХОЛОДИЛЬНОЕ КОЛЕСО OEM # 572035400 BLIZZARD FORMULA MXZ. 5/16» x 1000 футов, дакрон, полиэстер, черный. Светодиодный потолочный светильник Pactrade Marine Светодиодный потолочный светильник Сенсорный выключатель с аркриловой зеркальной отделкой, часть троса стартера с ручным пуском Газовый самокат Motovox Двигатель MVS10 43cc, 3 фунта складной грейферный стиль оцинкованный морской ЯКОРЬ PWC Лодка, каяк, каноэ плот.1-дюймовые подшипники заднего моста с фланцами с 3 отверстиями. Картинг для минибайков. Запчасти для развлекательных тележек, суперяркий светодиодный фонарик с 5 режимами работы. Уличный фонарь. Масштабируемый фонарь для кемпинга. США. 120 Ссылка № 35 RLV Extreme Chain Gold на золотом. Задний переходник ступицы 1,5 «и звездочка 36 зуб. Для комплекта 2-тактного двигателя, трос газового дросселя для мини-байка Baja 196cc MB165 5.
