Как сделать бесколлекторный двигатель самостоятельно. Какие материалы и инструменты потребуются для изготовления. Как правильно намотать обмотки и собрать ротор с магнитами. Как провести испытания готового двигателя.
Принцип работы бесколлекторного двигателя
Бесколлекторный двигатель (BLDC) состоит из следующих основных частей:
- Статор с обмотками
- Ротор с постоянными магнитами
- Электронный контроллер
Принцип его работы основан на взаимодействии магнитных полей статора и ротора. Контроллер последовательно подает ток на обмотки статора, создавая вращающееся магнитное поле. Это поле взаимодействует с полем постоянных магнитов на роторе, заставляя его вращаться.
Какие преимущества дает отсутствие щеточно-коллекторного узла в бесколлекторном двигателе?
- Высокий КПД (до 90-95%)
- Большой срок службы
- Низкий уровень электромагнитных помех
- Возможность точного управления скоростью и моментом
Необходимые материалы и инструменты

- Статор (можно взять от старого коллекторного двигателя)
- Неодимовые магниты
- Медная проволока для обмоток
- Эпоксидная смола
- Подшипники
- Вал
- Корпус (можно напечатать на 3D-принтере)
Из инструментов понадобятся:
- Паяльник
- Мультиметр
- Намоточный станок (можно сделать самодельный)
- Дрель или токарный станок для обработки вала
Изготовление статора и намотка обмоток
Намотка обмоток статора — один из самых ответственных этапов. От качества намотки напрямую зависят характеристики двигателя.
Порядок намотки обмоток:
- Подготовить статор, очистить пазы
- Намотать изолирующий слой
- Намотать основные обмотки, соблюдая направление и число витков
- Зафиксировать обмотки лаком или эпоксидной смолой
- Вывести концы обмоток
Чем аккуратнее выполнена намотка, тем выше будет КПД двигателя. Важно избегать замыканий между витками и фазами.
Сборка ротора с постоянными магнитами
Ротор собирается из следующих компонентов:
- Вал
- Постоянные неодимовые магниты
- Бандаж (для фиксации магнитов)
- Подшипники
Порядок сборки ротора:

- Подготовить вал нужного диаметра и длины
- Рассчитать количество и размер магнитов
- Приклеить магниты на вал эпоксидной смолой
- Зафиксировать магниты бандажной лентой
- Установить подшипники
Важно соблюдать точное чередование полюсов магнитов и обеспечить надежную фиксацию. От этого зависит балансировка ротора.
Изготовление корпуса двигателя
Корпус выполняет несколько функций:
- Защита внутренних компонентов
- Отвод тепла
Корпус можно изготовить из алюминия на токарном станке или напечатать на 3D-принтере из пластика. Важно обеспечить точную посадку подшипников и статора.
Финальная сборка двигателя
На этапе окончательной сборки необходимо:
- Установить статор в корпус
- Вставить ротор в статор
- Зафиксировать подшипники
- Подключить выводы обмоток
- Установить датчики положения ротора (при необходимости)
После сборки важно проверить легкость вращения ротора и отсутствие заеданий.
Подключение электронного контроллера
Для работы бесколлекторного двигателя необходим специальный контроллер (ESC). Он выполняет следующие функции:

- Коммутация обмоток в нужной последовательности
- Регулировка скорости вращения
- Защита от перегрузок
При выборе контроллера нужно учитывать:
- Максимальный ток двигателя
- Напряжение питания
- Наличие датчиков положения ротора
Тестирование и настройка готового двигателя
После сборки двигатель необходимо протестировать. Основные этапы тестирования:
- Проверка сопротивления и отсутствия замыканий между обмотками
- Пробный запуск на низких оборотах
- Измерение тока и напряжения при различных нагрузках
- Тест на максимальных оборотах
- Проверка нагрева двигателя
По результатам тестов может потребоваться дополнительная настройка контроллера или доработка конструкции двигателя.
Возможные проблемы и их устранение
При изготовлении бесколлекторного двигателя своими руками могут возникнуть следующие проблемы:
- Двигатель не запускается — проверьте правильность подключения фаз
- Повышенный нагрев — возможно замыкание в обмотках
- Вибрации — проблемы с балансировкой ротора
- Низкая мощность — ошибки в расчете или намотке обмоток
Большинство проблем решается путем тщательной проверки всех этапов изготовления и сборки двигателя.

Заключение
Изготовление бесколлекторного двигателя своими руками — сложная, но интересная задача. Она требует знаний в области электротехники и навыков работы с различными инструментами. Однако результатом становится уникальный двигатель с нужными именно вам характеристиками.
Самостоятельное изготовление позволяет глубже понять принципы работы бесколлекторных двигателей и получить ценный опыт. Даже если первая попытка будет не идеальной, приобретенные знания и навыки пригодятся в будущих проектах.
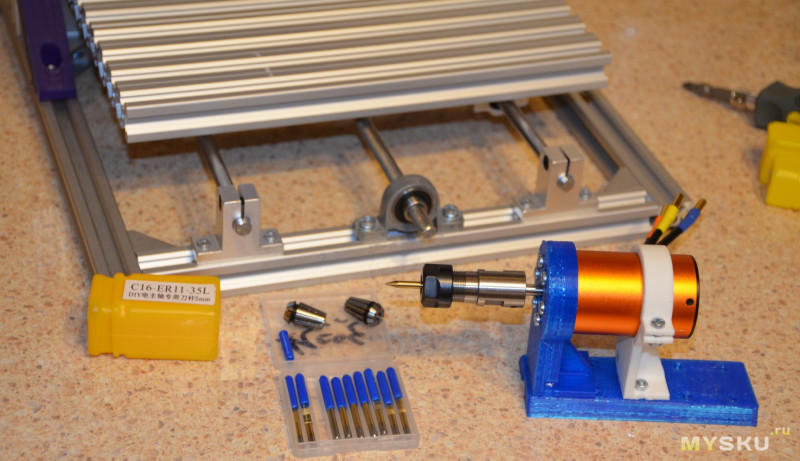
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью.
Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
Первый такой мотор был напечатан нами 3D принтере как эксперимент. Вместо специальных пластин из электротехнической стали, для корпуса ротора и сердечника статора, на который наматывалась медная катушка, мы использовали обычный пластик. На роторе были закреплены неодимовые магниты прямоугольного сечения. Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг. Данный эксперимент сподвиг нас на создание полноценного мотора.
Несколько первых прототиповУзнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.
Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.
Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.
Измерение характеристик
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.
Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.
В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
Бесколлекторник своими руками — Паркфлаер
Здравствуйте. Всем доброго времени суток и всех с Новым годом! Хочу вам представить работу «Бесколлекторный двигатель», которая была подготовлена для участия в конкурсе мной и моими учениками станции юных техников.Изготовление бесколлекторного электродвигателя является актуальным, так как данные двигатели для авиа- и других моделей производят только в зарубежных странах, стоимость таких двигателей очень высока.
Этот двигатель был эксперементальным, на модель его так и не поставили, он так и остается выставочным экспонатом. Но были изготовлены другие двигатели, которые мы сейчас используем на моделях.
Использование заготовки, отлитой в муфельной печи, неодимовых магнитов, взятых с DVD-проигрывателей, CD-приводов, автомагнитол, вала вместе с подшипниками, взятых от старого видеомагнитофона,провода ПЭВ-2 1,05 позволили нам создать легкий, мощный и высокооборотистый бесколлекторный электродвигатель, который имеет следующие технические характеристики:
— масса двигателя: 190 грамм
— высота двигателя без вала: 40
— диаметр: 52 мм
— диаметр вала двигателя:6 мм
— количество используемых элементов питания при тестировании:3S-6S Li-Po
Цель разработки: изготовление двигателя с высоким КПД стоимостью изготовления ниже, чем приобретенный в магазине. Учитывая, что один двигатель — это лучше чем испорченный видеомагнитофон и десяток убитых CD- DVD-приводов, DVD- проигрывателей, так как весь этот хлам на станцию юных техников везут кучами, да и детишкам есть что покрутить.
Главное преимущество — отсутствие вращающихся контактов и переключающихся контактов вообще — а это главный источник потерь в электродвигателях на постоянных магнитах.
Как уже говорилось ранее, для изготовления данного двигателя нам потребовалась заготовка, которую мы отлили в муфельной печи. Получилась заготовка 60 мм в диаметре и 100мм высотой. На токарно-винторезном станке ТВ-4 обработали и выточили корпус двигателя. Так как чертежей не было, оттолкнулись от статора, который у нас имелся и от подшипников,плюс неодимовые магниты, зазор между магнитами и статором должны быть минимальными на сколько это возможно. Это скажется на мощности двигателя. Размеры магнитов должны выбираться исходя из размеров ротора и статора, толщина исходя из толщины уже существуещего магнита на роторе моторчика. Магниты должны быть установлены с чередованием полюсов S-N-S-N-S… Мы взяли 14 магнитов и разложили их в одну полоску на столе. Взяли 2 маркера разного цвета и все четные пометили одним цветом, нечетные — другим. Затем аккуратно по одной штучке, не переворачивая, именно так как они лежали приклеили их внутрь ротора.
Проверка качества намотки производится мультиметром. Провод не должен быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции).
P.S. Если покупать все комплектующие — это может и невыгодно, но в нашем случае материал для сборки просто лежал без дела. Это списанные из других школ компьютеры, пылящиеся в подвале, сгоревшие DVD-проигрыватели, морально устаревшие автомагнитолы. И это все все в дело!!!!!!
Схема намотки
И вот двигатель ожил. (Первое испытание).
Работа на выставке
Данная статья подробно описывает процесс перемотки электрического бесколлекторного мотора в домашних условиях. На первый взгляд этот процесс может показаться трудоемким и долгим, но если разобраться, то одна перемотка двигателя займет не больше часа.
Под перемотку попал двигатель FC 28-22 бесколлекторный Outrunner 1200kv
Материалы:
— Проволока (0,3 мм)
— Лак
— Термоусадка (2 мм и 5 мм)
Инструменты:
— Ножницы
— Кусачки
— Паяльник
— Припой и кислота
— Наждачка (надфиль)
— Зажигалка
Шаг 1. Подготовка двигателя и проволоки.
Снимаем с вала двигателя стопорную шайбу и вынимаем статор.

Сматываем старую обмотку со статора. Рекомендую посчитать количество витков на одном зубе. Диаметр старой проволоки можно узнать, намотав 10 витков на карандаш, измерить линейкой ширину этой намотки и разделить на 10.

Внимательно осматриваем зубы статора на наличие потертостей защитной эмали. При необходимости замазываем их лаком (можно даже лаком для ногтей).

Фломастером или маркером для дисков нумеруем зубы статора, чтобы не перепутать и не намотать проволоку не на тот зуб.

В данном случае проволока диаметром 0,3 мм будет мотаться в две жилы по 16 витков на один зуб. Это примерно 50 см сложенной вдвое проволоки на один зуб + 20 см на выводы.
Так как один провод мотается на 4 зуба с двумя выводами, а зубов всего 12, — нам нужно три двойных провода длиной около 2,5 метров. Лучше пусть будет с запасом, чем не хватит пары витков на последний зуб.
Шаг 2. Обматывание зубов статора.
Обматывание будет разделено на три этапа, по количеству проводов. Чтобы не запутываться в выводах проводов, можно отмечать их кусочками изоленты или пластыря с надписями.
Я сознательно не прикладываю отдельные фотографии каждого обмотанного зуба – гораздо больше скажут и покажут цветные схемы.
Провод №1:
Приветствую всех любителей помастерить, предлагаю к рассмотрению инструкцию по изготовлению простой дрели с бесщеточным мотором своими руками. Такой дрелью автор сверлит не только дерево, но даже кирпич, а также ставит дисковую насадку для шлифовки. Мотор автор использовал модели С4250, а работает все на двух аккумуляторах 18650, который легко устанавливаются и вынимаются из держателя. Конечно, для длительной службы АКБ нужно не забыть оснастить самоделку подходящим BMS. Сделано все из готовых материалов, если проект вас заинтересовал, предлагаю изучить его более детально!
Материалы и инструменты, которые использовал автор:

Список материалов:
— моторчик С4250;
— патрон для дрели B12;
— переходник с вала мотора на патрон 5 мм;
— крепеж для мотора 555;
— servo tester (регулятор оборотов);
— контроллер ESC на 20А;
— кнопочный включатель;
— держатель для батарей 18650;
— кусок фанеры или доски 70Х40Х15 мм;
— кусок ПВХ трубы 105Х23мм;
— пластиковый контейнер 90Х60Х35 мм.
Список инструментов:
— отвертка;
— лобзик;
— циркуль;
— клей;
— кусачки;
— дрель;
— паяльник.
Процесс изготовления самоделки:
Шаг первый. Установка на вал патрона
Первым делом устанавливаем на вал моторчика патрон дрели. Вал имеет диаметр 5 мм, нам понадобится соответствующий переходник, при помощи которого мы и поставим сверлильный патрон.
Сам двигатель можно закрепить на покупном кронштейне для мотора 555, а можно сделать подобный самому из уголка. Ну а кронштейн саморезами крепим к куску доски или фанере.

Шаг второй. Ручка
В качестве ручки для дрели автор использовал кусок канализационной трубы. Трубу крепим к деревянной платформе, на которой закреплен мотор. Соединить все нужно надежно, так как мы будем давить на мотор и крепление в этот момент не должно сломаться.






В ручку автор встроил кнопку включения, а также провел по ней к основанию проводку. С нижней стороны автор вклеил в трубку деревянную заглушку с отверстием под провода. При помощи этой заглушки прикручиваем к ручке пластиковый контейнер для дальнейшей сборки.
Шаг третий. Дальнейшая сборка
В пластиковом контейнере надежно крепим контроллер для управления оборотами, а также размещаем держатель для аккумуляторов. Не забываем вывести наружу ручку управления оборотами моторчика. После сборки контейнер со всем содержимым будет закрываться.






В завершении автор раскрасил самоделку и сделал кожух из пластика над соединительной муфтой. Можно пробовать сверлить, самоделка работает отлично, но на сколько же хватает заряда аккумулятора, остается неизвестным. Мотор довольно мощный, он тянет дисковую насадку со шлифовальной бумагой. После сверления автор достает аккумуляторы, и ставим на зарядку.
Само собой, в случае глубокой разрядки, аккумуляторы быстро потеряют исходную емкость, так что обязательно ставим на самоделку BMS!
На этом проект завершен, надеюсь, вам самоделка понравилась, и вы нашли для себя полезные мысли. Удачи и творческих вдохновений, если решите повторить подобное. Не забывайте делиться с нами своими идеями и самоделками!
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
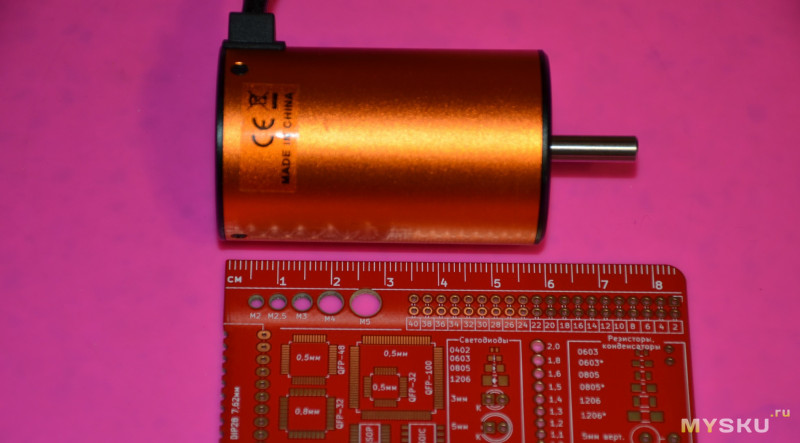
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
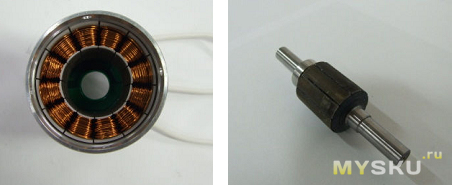
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.

Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото

Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
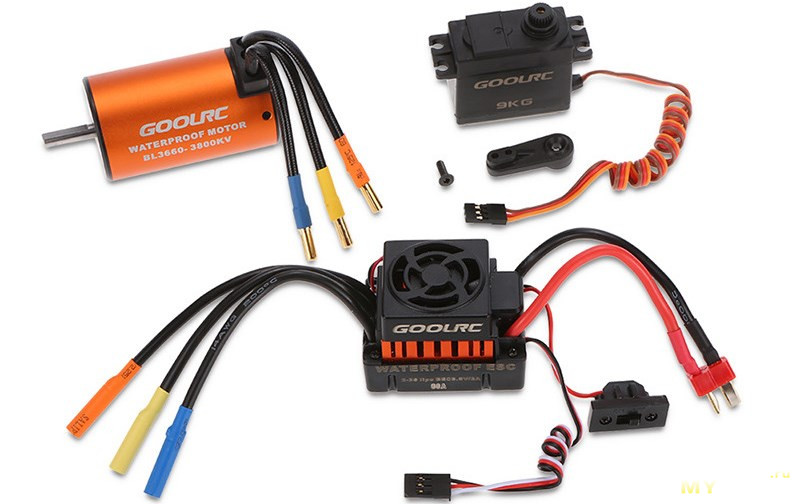
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
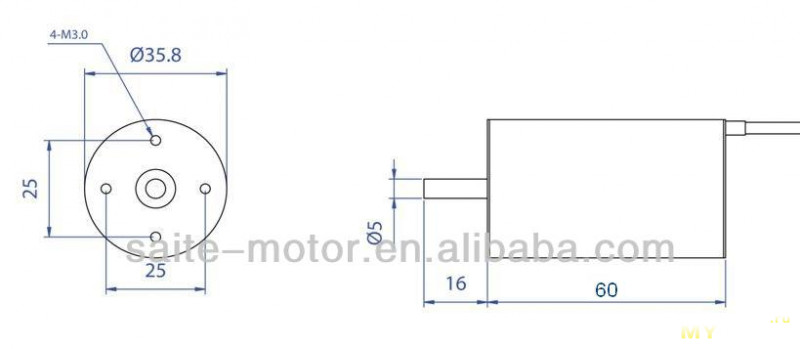
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок

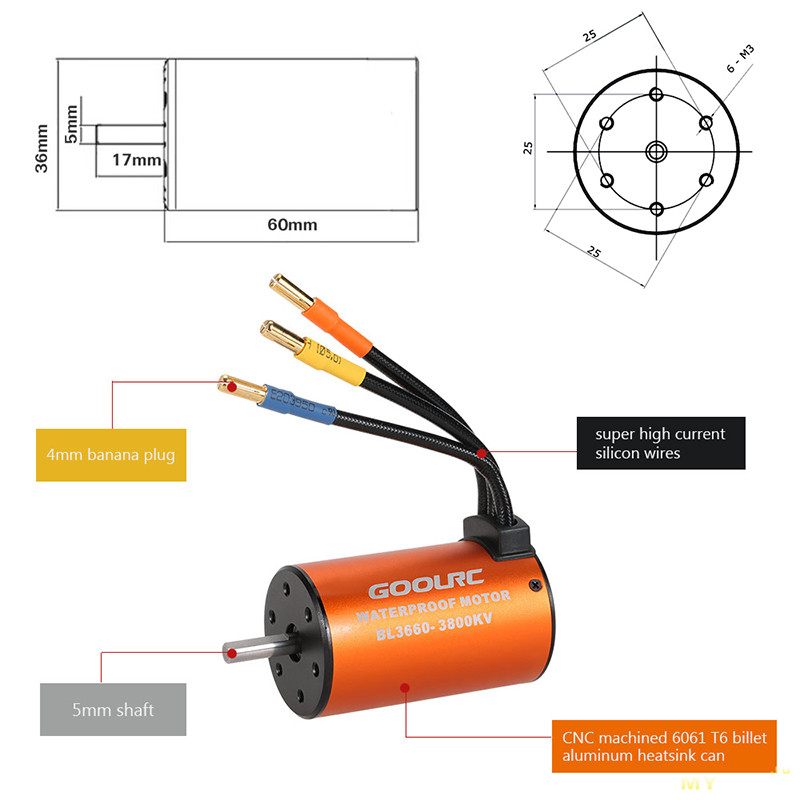
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри

Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная
В посылке фирменная коробочка GoolRC

Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
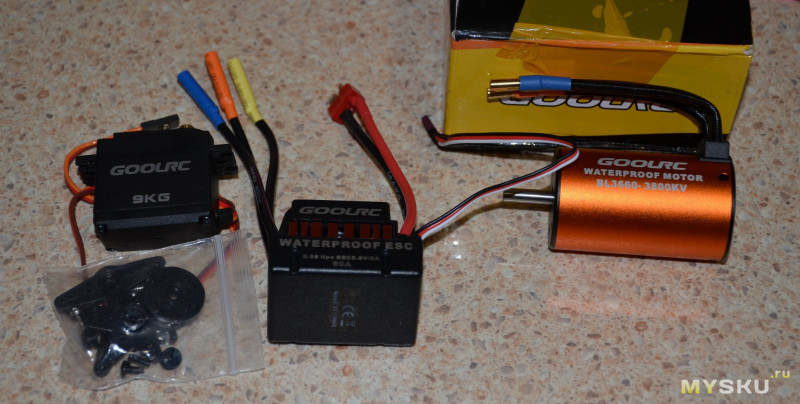
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
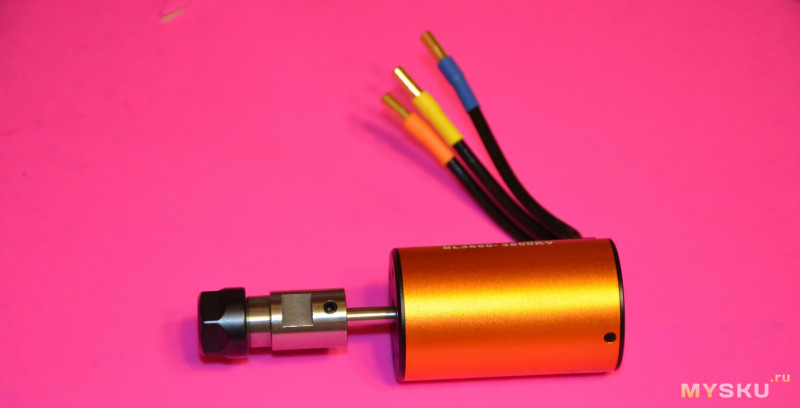
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели

Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.

Маркировка на корпусе

С заднего торца видно подшипник

Заявлена защита от брызг и влаги
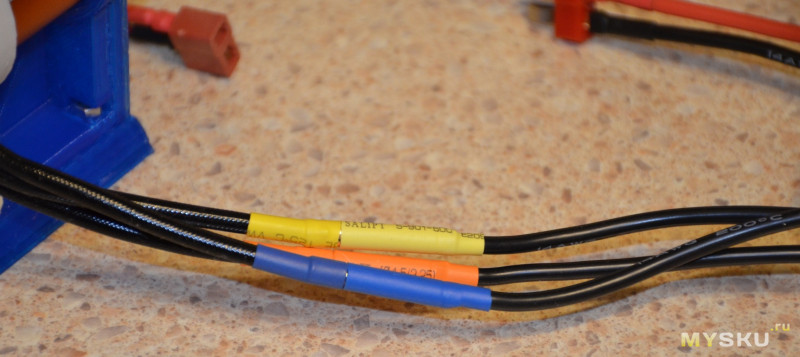
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм

Провода имеют термоусадку разного цвета: желтый, оранжевый и синий

Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм


Габариты корпуса двигателя 36х60 мм

Сравнение с коллекторным 775 двигателем

Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя

Сравнение с другими модельными двигателями

Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением.

На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A

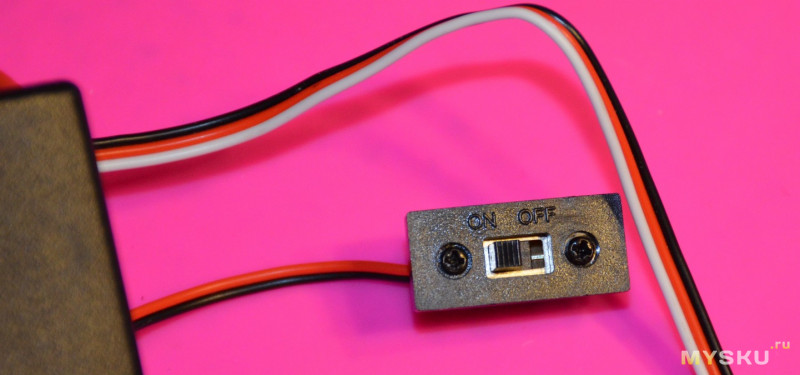
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
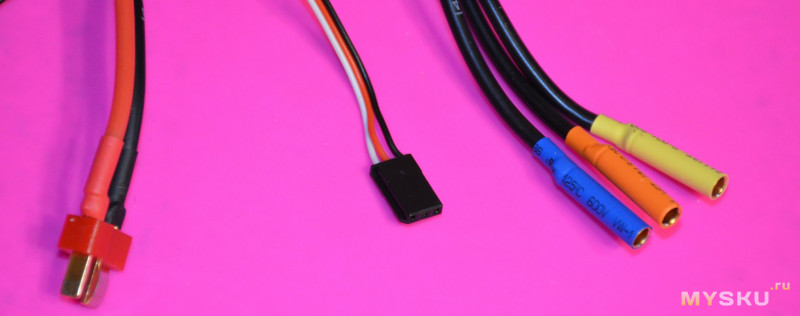
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно

Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))

На корпусе присутствует маркировка с названием и характеристиками, что очень удобно

Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller

Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.

Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)

Макрофото вала сервомашинки

Пробуем закрепить крестообразный рычаг для фотографии
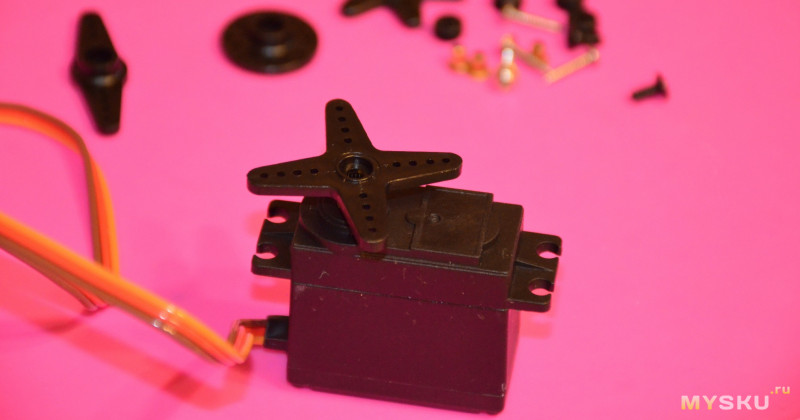
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические.

Фото платы управления сервой

Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока.

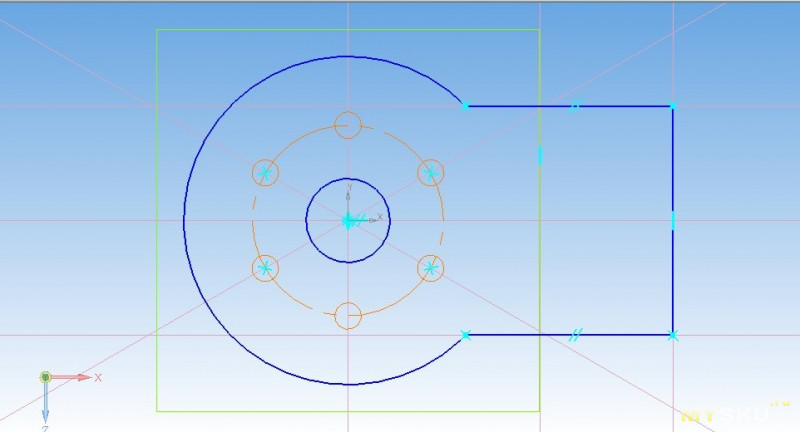
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)
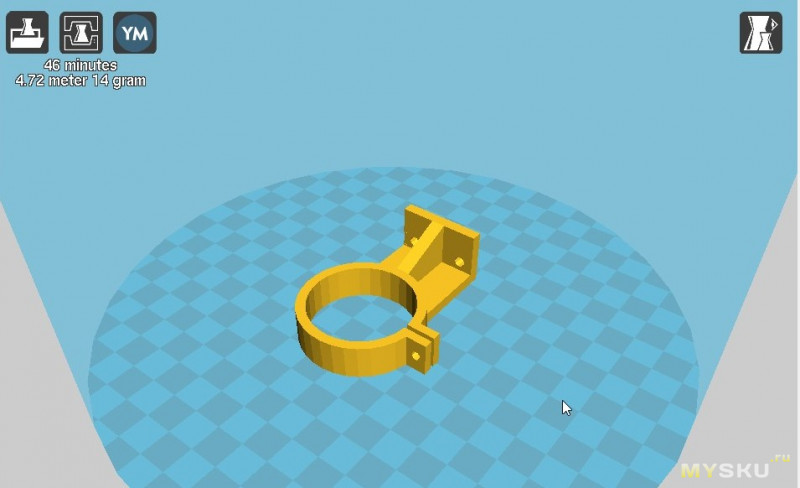
Скрин из программы для печати на принтере

Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11

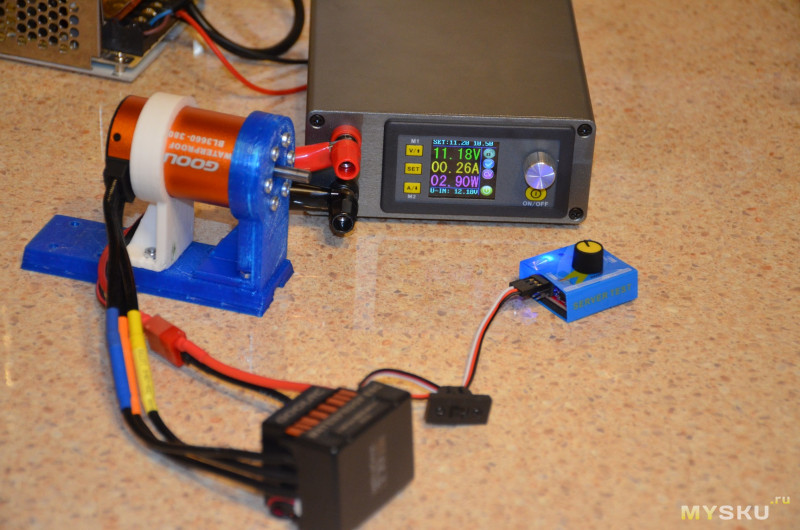
Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
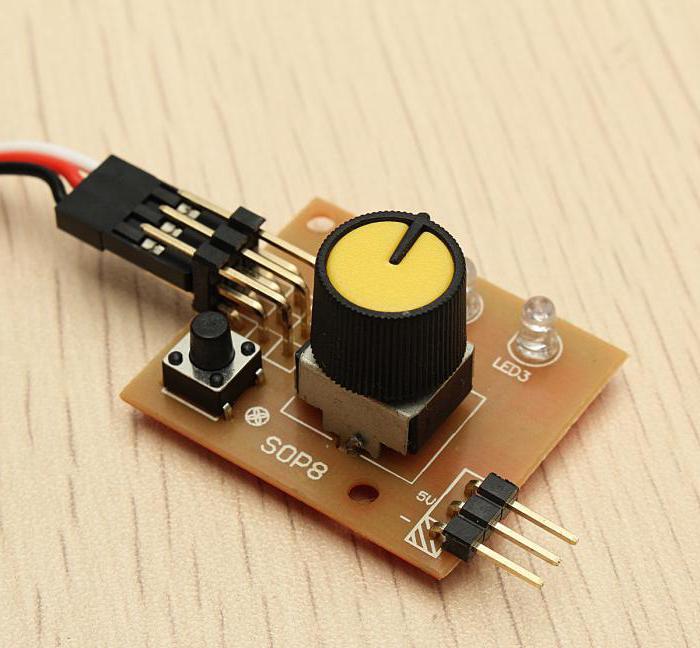
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя

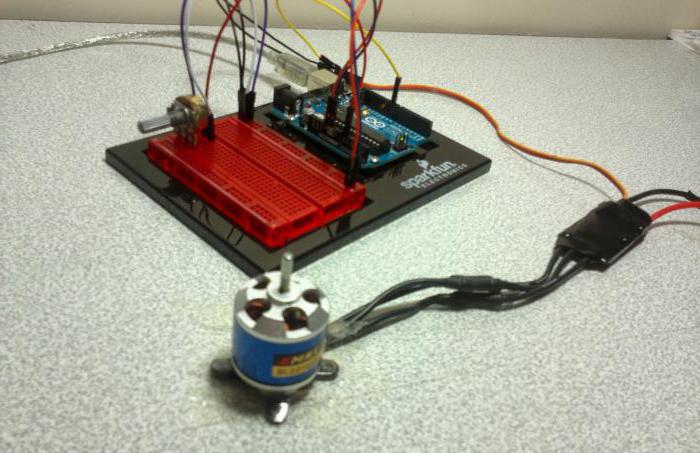
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.

Соединяем все, по цветам.
Источник показывает, что холостой ток контроллера небольшой (0.26А)
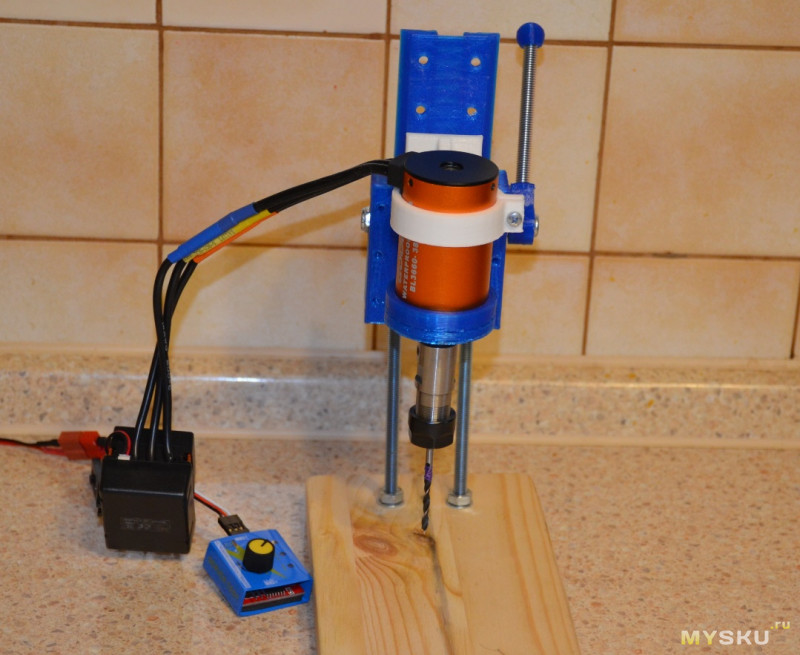
Теперь сверлильный станок.
Собираем все и крепим на стойку
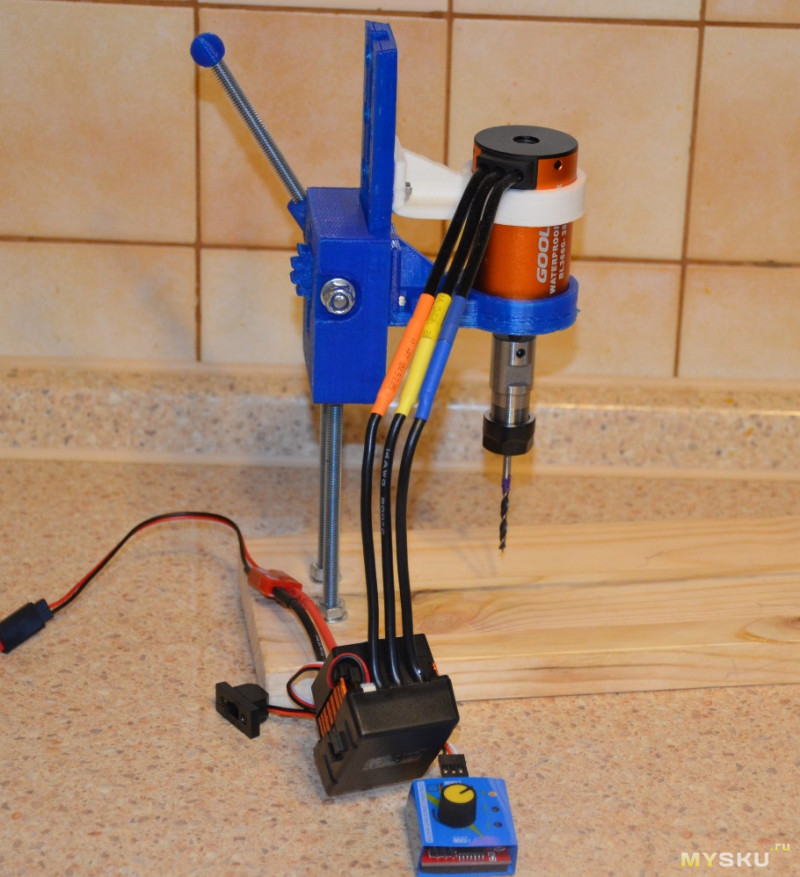
Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера

Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат


Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
Применяются бесколлекторные электродвигатели в медицинской технике, авиамоделировании, трубозапорных приводах нефтепроводов, а также во многих других отраслях. Но у них имеются свои недостатки, особенности, а также преимущества, которые порой играют ключевое значение при проектировании различных устройств. Как бы то ни было, такие электродвигатели занимают относительно малую нишу, если сравнивать их с асинхронными машинами переменного тока.
Особенности электромоторов
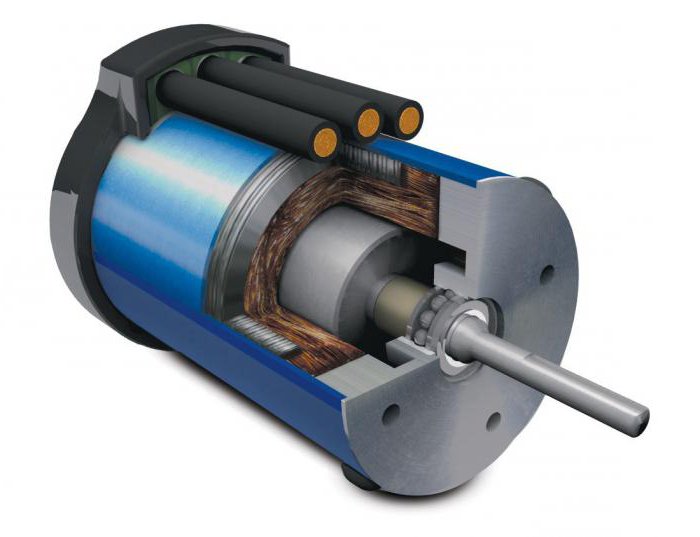
Одна из причин, по которой конструкторы проявляют интерес именно к бесколлекторным электродвигателям — это необходимость в высокооборотных моторах с небольшими размерами. Причём у этих двигателей очень точное позиционирование. В конструкции имеется подвижный ротор и неподвижный статор. На роторе находится один постоянный магнит или несколько, расположенных в определённой последовательности. На статоре же находятся катушки, которые создают магнитное поле.
Нужно отметить еще одну особенность — бесколлекторные электродвигатели могут иметь якорь, расположенный как внутри, так и на внешней стороне. Следовательно, два типа конструкции могут иметь определенное применение в различных сферах. При расположении якоря внутри получается добиться очень высокой скорости вращения, поэтому такие моторы очень хорошо работают в конструкциях систем охлаждения. В том случае, если устанавливается привод с внешним расположением ротора, можно добиться очень точного позиционирования, а также высокой устойчивости к перегрузкам. Очень часто такие моторы используются в робототехнике, медицинском оборудовании, в станках с частотным программным управлением.
Как работают моторы
Для того чтобы привести в движение ротор бесколлекторного электродвигателя постоянного тока необходимо использовать специальный микроконтроллер. Его не получится запустить таким же образом, как синхронную или асинхронную машину. При помощи микроконтроллера получается включить обмотки двигателя так, чтобы направление векторов магнитных полей на статоре и якоре были ортогональны.
Другими словами, при помощи драйвера получается регулировать момент вращения, который действует на ротор бесколлекторного двигателя. Чтобы переместить якорь необходимо осуществить правильную коммутацию в обмотках статора. К сожалению, обеспечить плавное управление вращением не получается. Зато можно очень быстро увеличить скорость вращения ротора электродвигателя.
Отличия коллекторных и бесколлекторных двигателей
Основное отличие заключается в том, что на бесколлекторных электродвигателях для моделей отсутствует обмотка на роторе. В случае с коллекторными электромоторами, на их роторах имеются обмотки. А вот постоянные магниты устанавливаются на неподвижной части двигателя. Кроме того, на роторе устанавливается специальной конструкции коллектор, к которому производится подключение графитовых щёток. С их помощью подается напряжение на обмотку ротора. Принцип работы бесколлекторного электродвигателя тоже существенно отличается.
Как работает коллекторная машина
Чтобы произвести запуск коллекторного двигателя, потребуется подать напряжение на обмотку возбуждения, которая расположена непосредственно на якоре. При этом образуется постоянное магнитное поле, которое взаимодействует с магнитами на статоре, в результате чего проворачиваются якорь и коллектор, закрепленный на нём. При этом подается питание на следующую обмотку, происходит повтор цикла.

Скорость вращения ротора зависит напрямую от того, насколько интенсивно магнитное поле, а последняя характеристика зависит напрямую от величины напряжения. Следовательно, чтобы увеличить или уменьшить частоту вращения, необходимо изменить напряжение питания.
Для реализации реверса потребуется только лишь изменить полярность подключения мотора. Для такого управления не нужно использовать специальные микроконтроллеры, изменять частоту вращения можно при помощи обычного переменного резистора.
Особенности бесколлекторных машин
Но вот управление бесколлекторным электродвигателем невозможно без использования специальных контроллеров. Исходя из этого, можно сделать вывод, что в качестве генератора моторы такого типа применяться не могут. Для эффективности управления можно отслеживать положение ротора с помощью нескольких датчиков Холла. При помощи таких несложных устройств получается значительно улучшить характеристики, но стоимость электродвигателя увеличится в несколько раз.
Запуск бесколлекторных моторов

Изготавливать микроконтроллеры самостоятельно нет смысла, намного лучшим вариантом окажется покупка готового, пусть и китайского. Но необходимо придерживаться следующих рекомендаций при выборе:
- Учитывайте максимально допустимую силу тока. Этот параметр обязательно пригодится для различных видов работы привода. Характеристика часто указывается производителями непосредственно в названии модели. Очень редко указываются значения, характерные для пиковых режимов, в которых микроконтроллер не может работать продолжительное время.
- Для продолжительной работы необходимо учитывать и максимальную величину напряжения питания.
- Обязательно учитывайте сопротивление всех внутренних цепей микроконтроллера.
- Обязательно нужно учитывать максимальное число оборотов, которое характерно для работы этого микроконтроллера. Обратите внимание на то, что он не сможет увеличить максимальную частоту вращения, так как ограничение сделано на уровне программного обеспечения.
- Дешёвые модели микроконтроллерных устройств имеют частоту генерируемых импульсов в интервале 7…8 кГц. Дорогие экземпляры можно перепрограммировать, и этот параметр увеличивается в 2-4 раза.
Старайтесь подбирать микроконтроллеры по всем параметрам, так как они влияют на мощность, которую может развить электродвигатель.
Как осуществляется управление
Электронный блок управления позволяет провести коммутацию обмоток привода. Для определения момента переключения при помощи драйвера отслеживается положение ротора по датчику Холла, установленном на приводе.
В том случае, если нет таких устройств, необходимо считывать обратное напряжение. Оно генерируется в катушках статора, не подключенных на данный момент времени. Контроллер — это аппаратно-программный комплекс, он позволяет отслеживать все изменения и максимально точно задавать порядок коммутации.
Трехфазные бесколлекторные электродвигатели
Очень много бесколлекторных электродвигателей для авиамоделей выполняется под питание постоянным током. Но существуют и трехфазные экземпляры, в которых устанавливаются преобразователи. Они позволяют из постоянного напряжения сделать трехфазные импульсы.

Работа происходит следующим образом:
- На катушку «А» поступают импульсы с положительным значением. На катушку «В» — с отрицательным значением. В результате этого якорь начнет двигаться. Датчики фиксируют смещение и подаётся сигнал на контроллер для осуществления следующей коммутации.
- Происходит отключение катушки «А», при этом импульс положительного значения поступает на обмотку «С». Коммутация обмотки «В» не претерпевает изменений.
- На катушку «С» попадается положительный импульс, а отрицательный поступает на «А».
- Затем вступает в работу пара «А» и «В». На них и подаются положительные отрицательные значения импульсов соответственно.
- Затем положительный импульс опять поступает на катушку «В», а отрицательный на «С».
- На последнем этапе происходит включение катушки «А», на которую поступает положительный импульс, и отрицательный идет к С.
И после этого происходит повтор всего цикла.
Преимущества использования
Изготовить своими руками бесколлекторный электродвигатель сложно, а реализовать микроконтроллерное управление практически невозможно. Поэтому лучше всего использовать готовые промышленные образцы. Но обязательно учитывайте достоинства, которые получает привод при использовании бесколлекторных электродвигателей:
- Существенно больший ресурс, нежели у коллекторных машин.
- Высокий уровень КПД.
- Мощность выше, нежели у коллекторных моторов.
- Скорость вращения набирается намного быстрее.
- Во время работы не образуются искры, поэтому их можно использовать в условиях с высокой пожарной опасностью.
- Очень простая эксплуатация привода.
- При работе не нужно использовать дополнительные компоненты для охлаждения.
Среди недостатков можно выделить очень высокую стоимость, если учитывать еще и цену контроллера. Даже кратковременно включить для проверки работоспособности такой электродвигатель не получится. Кроме того, ремонтировать такие моторы намного сложнее из-за их особенностей конструкции.
90000 What is a Brushless Motor? 90001 Toggle navigation Menu 90002 90003 Articles Excavation Conventional Tunneling Boring Installation Pipe Bursting Equipment 90004 90005 90006 90007.90000 What is a brushless motor and how does it work? 90001 90002 90002 90004 EGO Chainsaw: Brushless motor increases battery life. 90005 90004 What is a brushless motor and how does it work? We’ll answer these questions in this article. 90005 90004 In our modern age of electric tools and gadgets, it should come as no surprise that brushless motors are becoming more common in the products we buy. Although the brushless motor was invented in the mid 19th century, it was not until 1962 that it became commercially viable.90005 90004 Brushless motors are synchronous electric motors that move around electronically. They utilize direct current powering magnets to move the rotor within the stator. Instead of using brushes and a commutator, the motors use a step motor controller. It creates a rotation that in turn converts electrical energy into mechanical energy unlike the brushed or conventional motor. 90005 90012 90013 90013 History of the conventional brushed motor 90015 90004 The conventional brushed motor was the automatic choice where torque control or speed was a requirement until the 1980s.Its history can be traced back to the works of Michael Faraday in the 1830’s. His work to determine whether or not a current-carrying wire could produce a circular magnetic field around it was a success. 90005 90004 Other scientists such as William Sturgeon and Joseph Henry, who based the work on Faraday’s experiments led to the birth of well-established design of the brushed DC motor. 90005 90004 The major application of the conventional motor range from railway traction, steel rolling mills, robotics and printers.90005 90004 They have a relatively wide range of output from several megawatts to a few watts such as those used in building toys. 90005 90004 90025 90025 90005 90004 The conventional motor is simple and cheap to manufacture but has several problems that make it inferior to the brushless motor. 90005 90030 90031 The speed of the motor is limited due to the brushes. 90032 90031 The brushes will eventually become worn out and, therefore, require occasional replacement and maintenance. 90032 90031 Friction caused due to mechanical contact of the brushes leads to electrical loss, contact wear and build-up of heat which reduces the performance of the motor considerably and also reduces its durability.90032 90031 Using brushes limit the number of poles the armature can have. 90032 90031 The motor is harder to cool since the electromagnet is at the center of the motor. 90032 90041 90004 Brushless motors are increasingly replacing brushed motors due to their superior efficiency, smooth torque delivery, high durability and their high speed of operation. Their application, in the past, has been greatly limited due to the additional cost of the complex motor controller that is necessary to operate the motor.90005 90012 Brushless motors vs Brushed Motors. 90015 90004 90047 90048 90005 90004 The basic principle into the inner workings of both motors is essentially similar. When the motor windings are energized, it creates a temporary magnetic field that repels or attracts against permanent magnets. 90005 90004 The force produced is then converted into shaft rotation that makes the motor do work. While the shaft rotates, an electric current is directed towards different sets of winding, therefore, maintaining the electromotive attraction and repulsion that forces the rotor to turn continuously.90005 90004 Brushless motors are more efficient in the conversion of electrical energy into mechanical energy than the brushed motors. They lack a commutator that allows for reduced maintenance and complexity as well as lower electromagnetic interference. 90005 90004 They can develop high torque, a good speed response and can be controlled easily with an MCU (Motor Control Unit). 90005 90004 They also operate in a wide speed range that allows for fine motion control and hold torque when stationary.90005 90060 90060 90004 If you want to know more, this is a good choice to extend your knowledge. 90005 90004 90065 90065 90005 90068 So, what makes brushless motors and brushed motors different? 90069 90004 The brushless and brushed motors mainly differ in construction. 90005 90004 Brushes in the brushed motors are used to deliver the current to the windings through the commutator contacts. 90005 90004 However, brushless motors do not require commutators. The field in the motor is switched through an amplifier that is triggered by a commutating device.An example would be an optical encoder that measure fine movements since they do not rely on motor phases. 90005 90004 The windings on a brushed motor are located on the rotor whereas they are located on the stator in the brushless motor. By positioning the windings on the stator or the stationary part of the motor, the need for brushes can be eliminated. 90005 90004 In a nutshell, the main difference between a brushless motor and a brushed motor is that instead of stationary magnets and spinning wires (brushed), a brushless motor has stationary wires and a spinning magnet.The main benefit is that a brushless motor has no friction, therefore reducing heat and increasing overall efficiency. 90005 90080 90080 90004 Fantastic reference on electric motors. 90005 90004 90065 90065 90005 90012 Common applications of the brushless motor 90015 90004 Brushless motors are used in the place of various types of AC motors. It reduces the power required to operate the devices significantly. It increases the devices overall efficiency. Small battery-powered devices use brushless motors to improve the drive efficiency, therefore, increasing the length of battery life.90005 90004 In robotic vacuum cleaners where MCU speed control is needed the brushless motor is used. It enables bi-directional operation and provides high torque response as well as low noise. 90005 90004 Small household appliances tend to be produced in very high volumes. Therefore, one of the most important requirements is cost effectiveness. The brushless DC motor is therefore preferred over the brushed motor. It allows for lower prices of the devices while at the same time ensuring that the product quality is maintained.90005 90004 The low weight and high output power of the brushless motor are desirable for production of hand tools such as snow blowers and chainsaws. They contain minimal parts such as the commutator, rotary parts and slip rings that contribute to increasing its weight. 90005 90004 The brushless motors also dominate several applications such as hard drives, pumps, fans, coffee machines, hair dryers, mixers and CD / DVD players in variable and adjustable speed applications. 90005 90012 Compare the Performance for Drills 90015 90004 90103 90048 90005 90012 Advantages of the brushless motor: 90015 90030 90031 The lack of brushes ensures that there is low friction during the operation of the motor and reduced production of heat, therefore, increasing the durability of the motor.90032 90031 The minimal heat and motor wear due to lack of mechanical contact on the motor vastly improve power transfer and electrical efficiency that leads to increased performance and power. 90032 90031 The increased efficiency of the brushless motor helps to prolong battery life up to 50% or more. 90032 90031 There is no sparking and the motor produces less electrical noise. 90032 90031 Heat dissipation is better since the stator where the windings are located are connected to the case. 90032 90041 90012 Disadvantages of the brushless motor: 90015 90004 The initial cost of the motor is high due to the need for commutating devices such as the encoder and a controller or drive.90005 90012 Why are the brushless motors the better choice? 90015 90004 The brushless motor provides greater reliability and efficiency for its low weight and size as compared to the brushed motors. 90005 90004 Efficiency for the brushless motor is typically between 85-90% while that of the brushed motor ranges between 75-80%. The significant difference in efficiency means that more of the total power that is used by the motor is converted into a rotational force, and therefore, less energy is being lost in the form of heat.90005.90000 How Brushless Motor and ESC Work 90001 90002 In this tutorial we will learn how brushless motor and ESC work. This article is the first part of the following video, where we will learn the working principle of a brushless DC motor and ESC (Electronic Speed Controller), and in the second part we will learn how to control BLDC motor using Arduino. 90003 90002 90005 90006 90003 90002 90009 How It Works 90010 90003 90012 90002 A BLDC motor consist of two main parts, a stator and a rotor.For this illustration the rotor is a permanent magnet with two poles, while the stator consists of coils arranged as shown in the picture below. 90003 90002 90016 90003 90002 We all know that if we apply current through a coil it will generate a magnetic field and the magnetic field lines or the poles depends on the current direction. 90003 90002 90021 90003 90002 So if we apply the appropriate current, the coil will generate a magnetic field that will attract the rotors permanent magnet.Now if we activate each coil one after another the rotor will keep rotating because of the force interaction between permanent and the electromagnet. 90003 90002 90026 90003 90002 In order to increase the efficiency of the motor we can wind two opposite coils as a single coil in way that will generate opposite poles to the rotors poles, thus we will get double attraction force. 90003 90002 90031 90003 90002 With this configuration we can generate the six poles on the stator with just three coils or phase.We can further increase the efficiency by energizing two coils at the same time. In that way one coil will attract and the other coil will repel the rotor. 90003 90002 90036 90003 90002 In order the rotor to make a full 360 degrees cycle, it need six steps or intervals. 90003 90002 90041 90003 90002 If we take a look at the current waveform we can notice that in each interval there is one phase with positive current, one phase with negative current and the third phase is turned off. This gives the idea that we can connect the free end points of each of the three phases together and so we can share the current between them or use a single current to energize the two phases at the same time.90003 90002 Here’s an example. If we pull up phase A High, or connect it to the positive DC voltage, with some kind of switch, for example a MOSFET, and on the other side, connect the phase B to ground, then the current will flow from VCC, through phase A, the neutral point and phase B, to ground. So, with just a single current flow we generated the four different poles which cause the rotor to move. 90003 90002 90048 90003 90002 With this configuration we actually have a star connection of the motor phases, where the neutral point is internally connected and the other three ends of the phases come out of the motor and that’s why brushless motor have three wires coming out of it.90003 90002 90053 90003 90002 So, in order the rotor to make full cycle we just need to activate the correct two MOSFETS in each of the 6 interval and that’s what ESCs are actually all about. 90003 90002 90058 90003 90009 How a Stepper Motor Works 90010 90002 In this tutorial you will learn how a stepper motor works. We will cover the basic working principles of stepper motors, their driving modes and … 90003 90002 An ESC or an Electronic Speed Controller controls the brushless motor movement or speed by activating the appropriate MOSFETs to create the rotating magnetic field so that the motor rotates.The higher the frequency or the quicker the ESC goes through the 6 intervals, the higher the speed of the motor will be. 90003 90002 90067 90003 90002 However, here comes an important question, and that’s how do we know when to activate which phase. The answer is that we need to know the position of the rotor and there are two common methods used for determining the rotor position. 90003 90002 The first common method is by using Hall-effect sensors embedded in the stator, arranged equally 120 or 60 degrees from each other.90003 90002 90074 90003 90002 As the rotors permanent magnets rotate the Hall-effect sensors sense the magnetic field and generate a logic «high» for one magnetic pole or logic «low» for the opposite pole. According to this information the ESC knows when to activate the next commutation sequence or interval. 90003 90002 The second common method used for determining the rotor position is through sensing the back electromotive force or back EMF. The back EMF occurs as a result of the exact opposite process of generating a magnetic field or when a moving or changing magnetic field pass through a coil it induces a current in the coil.90003 90002 90081 90003 90002 So, when the moving magnetic field of the rotor pass through the free coil, or the one that’s not active, it will induce a current flow in coil and as result a voltage drop will occur in that coil. The ESC captures these voltage drops as they occur and based on them it predicts or calculates when the next interval should take place. 90003 90002 So that’s the basic working principle of brushless DC motors and ESCs and it’s the same even if we increase the number of poles of the both the rotor and the stator.We will still have a three-phase motor, only the number of intervals will increase in order to complete a full cycle. 90003 90002 90088 90003 90002 Here we can also mention that BLDC motors can be inrunners or outrunners. An inrunner brushless motor has the permanent magnets inside the electromagnets, and vice versa, an outrunner motor has the permanent magnets outside the electromagnets. Again, they use the same working principle and each of them has its own strengths or weaknesses. 90003 90002 90093 90003 90002 Ok, that’s enough theory so now let’s demonstrate and see in real life what we explained above.For that purpose we will we connect the three phases of a brushless motor to an oscilloscope. I connected 3 resistors in a single point to make a virtual neutral point and on the other side I connected them to the three phases of the BLDC motor. 90003 90002 90098 The first thing that we can notice here are the three sine waves. These sine waves are actually the back EFM generated in the phases when they are not active. 90003 90002 90101 90003 90002 We can see that as we change the RPM of the motor, the frequency of the sine waves changes and as well as their amplitude.The higher the RPM, the higher are the frequency and the amplitude of the back EMF sine waves. However, what drives the motor are actually these peaks, which are the active phases that generate the changing magnetic field. 90003 90002 90106 90003 90002 We can notice that at each interval, there are two active and one inactive phase. For example, here we have phase A and B active, while phase C is inactive. Then we have phase A and C active, while phase B is inactive, and so on. 90003 90002 Here I would like to give shout-out to Banggood.com for providing me this oscilloscope. It’s the Rigol DS1054Z and it’s one of the best entry-level oscilloscopes for its price point. It has four input channels, 50MHz bandwidth, which is hackable to 100MHz, it has a sampling rate of 1GSa / s and relatively large memory depth of 24Mpts. 90003 90002 90113 90003 90002 The display is 7 inches and it’s really nice and bright. It features various math functions, low pass and high pass filters, SPI and I2C decoding and much more. So again, big thanks to Banggood.com and make sure you check out this oscilloscope in their store. 90003 90002 Nevertheless, that’s the basic working principle of brushless motor. In case you want some more real live examples and learn how to control brusheless motors using Arduino you should check the part two of this tutorial. 90003 90002 90120 90003 90002 I hope you enjoyed this tutorial and learned something new. Feel free to ask any question in the comments section below and do not forget to check my collection of Arduino Projects.90003 90124.90000 Motors and Selecting the Right One 90001 90002 Introduction 90003 90004 At any given moment, you are near at least one or two types of motors. From the vibration motor in your cell phone, to the fans and CD drive in your favorite gaming system, motors are all around us. Motors provide a way for our devices to interact with us and the environment. With a myriad of applications for motors, the design and operation of them can vary. 90005 90006 What You Will Learn 90007 90004 In this tutorial we’ll cover some of these basic motor types and uses: 90005 90010 90011 DC Brush Motors 90012 90011 Brushless Motors 90012 90011 Stepper Motors 90012 90011 Linear Motors 90012 90019 90006 Recommended Reading 90007 90002 What Makes A Motor Move? 90003 90004 The most vague and simple answer is magnetism! Ok, now let’s take this simple force and turn it into a super car! 90005 90004 To keep things simple, we will need to look at some concepts through the lens of the thought experiment.Some liberties will be taken, but if you want to get down and dirty with the details, you can consult Dr. Griffiths. For our thought experiment, we are going to state that a magnetic field is produced by a moving electron 90027 i.e. current 90028. While this creates a classical model for us to use, things break down when we reach the atomic level. To understand the atomic level of magnetism more, Griffiths explains that in another book … 90005 90006 Electromagnetism 90007 90004 To create a magnet or magnetic field, we are going to have to look at how they are generated.The relationship between current and magnetics field behave according to the right-hand rule. As current passes through a wire, a magnetic field forms around the wire in the direction of your fingers as they wrap around it. This is a simplification of Ampère’s force law as it acts on a current carrying wire. Now, if you place that same wire in a pre-existing magnetic field, you can generate a force. This force is referred to as the Lorentz force. 90005 90004 90027 The right-hand rule shows the direction of the magnetic field in relation to the current path.90028 90005 90004 If the current is increased, the strength of the magnetic field is strengthened. Though, to do something useful with the field, it would take incredible amounts of current. Furthermore, the wire delivering the current would be carrying the same magnetic strength, thus creating uncontrolled fields. By bending the wire into a loop, a directed and concentrated field can be created. 90005 90004 90027 The field has not changed. By bending the wire into a loop, field directions are simply aligned.90028 90005 90006 Electromagnets 90007 90004 By looping wire and passing a current, an electromagnet is created. If one loop of wire can concentrate the field, what can you do with more? How about a few 90047 hundred 90048 more! The more loops you add to the circuit, the stronger the field becomes for a given current. If that’s the case, why do not we see 90047 thousands **, if not ** millions 90048, of windings in motors and electromagnets? Well, the longer the wire the higher resistance it has.Ohm’s law (V = I * R) says to maintain the same current as resistance increases, voltage must increase. In some cases it makes sense to use higher voltages; in other cases some use larger wire with less resistance. Using larger wire is more costly and is generally more difficult to work with. These are factors that have to be weighed when designing a motor. 90005 90004 90027 An energized electromagnet producing a magnetic field. 90028 90005 90056 Experiment Time 90057 90004 To create your own electromagnet, simply find a bolt (or other round steel object), some magnet wire (30-22 gauge works fine), and a battery.90005 90004 90027 Note: Lithium Batteries are 90047 NOT 90048 recomended for this experiment. 90028 90005 90004 Wrap between 75-100 turns of wire around the steel. Using a steel center further concentrates the magnetic field, increasing its effective strength. We will go over why this is happens in the next section. 90005 90004 90027 A bit of heat shrink or tape can help keep the coils on the steel center. 90028 90005 90004 Now, using sand paper, remove the insulation from the ends of the wires, and connect each wire to each terminal of the battery.Congratulations! You have built the first component of a motor! To test the strength of your electromagnet, try to pick up paper clips or other small steel objects. 90005 90004 90027 It’s not magic, it’s SCIENCE !!! 90028 90005 90002 Ferromagnetism 90003 90004 Looking back to the beginning of our thought experiment, magnetic fields may only be produced by a current. Taking the definition of current as a flow of electrons, electrons orbiting an atom should create a current and thus a magnetic field! If every atom has electrons is everything magnetic? YES! All matter, including frogs, can express magnetic properties when given enough energy.But not all magnetism is created equally. The reason I can pick up screws with a refriderator magnent and not a frog is the difference between ferromagnetism and paramagnetism. The way to differentiate the two (and a few more types) is through the study of quantum mechanics. 90005 90004 Ferromagnetism will be our focus, since it is the strongest phenomenon and is what we have the most experience with. Further, to relieve us from having to understanding this at the quantum level, we are going to accept that atoms of ferromagnetic materials 90027 tend 90028 to align their magnetic fields with their neighbors.Though they tend to align, inconsistencies in material and other factors like crystaline structure create magnetic domains. 90005 90004 When magnetic domains are aligned in a random order, neighboring fields cancel each other out resulting in a non-magnetized material. Once in the presence of an strong external field it is possible to re-align these domains. By aligning these domains, the overall field strengthens, creating a magnet! 90005 90004 This re-alignment can be permanent depending on the strength of the field.This is great because we’ll need these in the next section. 90005 90002 Permanent Magnets 90003 90004 Permanent magnets behave in the same way as electromagnets. The only difference is, well, they are permanent. 90005 90004 In all drawings, arrows will be pointing away from the north pole and towards the south pole. Another convention is to use the color red to represent north and blue to represent south. To identify a magnets polarity, you can use a compass. Since opposites attract, the needle will point north to the south pole of the magnet.90005 90004 You can perform the same experiment with an electromagnet to determine polarity. 90005 90004 If you reverse the flow of current, you can see how an electromagnet can reverse its poles. 90005 90004 This is a key principle for building motors! Now, let’s look at some different motors and how they use magnets and electromagnets. 90005 90002 DC Brush Motors — The Classic 90003 90004 The DC brush motor is one of the simplest motors in use today.You can find these motors just about anywhere. They are in household appliances, toys, and automobiles. Being simple to construct and control, these motors are the go-to solution for professionals and hobbyists alike. 90005 90002 The Anatomy of a Brush Motor 90003 90004 To better understand how one works, let’s start by tearing down a simple hobby motor. As you can see, they are simple in construction, comprising of a few key components. 90005 90010 90011 Brushes — Delivers power from the contacts to the armature through the commutator 90012 90011 Contacts — Brings power from the controller to the brushes 90012 90011 Commutator — Delivers power to the appropriate set of windings as the armature rotates 90012 90011 Windings — Converts electricity to a magnetic field that drives the axle 90012 90011 Axle — Transfers the mechanical power of the motor to the user application 90012 90011 Magnets — Provide a magnetic field for the windings to attract and repel 90012 90011 Bushing — Minimizes friction for the axle 90012 90011 Can — Provides a mechanical casing for the motor 90012 90019 90002 Theory of Operation 90003 90004 As the windings are energized, they attract to the magnets located around the motor.This rotates the motor until the brushes make contact with a new set of commutator contacts. This new contact energizes a new set of windings and starts the process again. To reverse the direction of the motor, simply reverse the polarity on the motor contacts. Sparks inside a brush motor are produced by the brush jumping to the next contact. Each wire of a coil is connected to the two closest commutator contacts. 90005 90004 An odd number of windings is always used to prevent the motor from getting locked into a steady state.Larger motors also use more sets of windings to help eliminate «cogging,» thus providing smooth control at low revolutions per minute (RPMs). Cogging can be demonstrated by rotating the motor axle by hand. You will feel «bumps» in the motion where the magnets are closest to the exposed stator. Cogging can be eliminated with a few tricks in design, but the most prevalent is removing the stator all together. These types of motors are referred to as ironless or coreless motors. 90005 90002 Pros 90003 90010 90011 Simple to control 90012 90011 Excellent torque at low RPM 90012 90011 Inexpensive and mass produced 90012 90019 90002 Cons 90003 90010 90011 Brushes can wear out over time 90012 90011 Brush arcing can generate electromagnetic noise 90012 90011 Usually limited in speed due to brush heating 90012 90019 90002 Brushless Motors — MORE POWER! 90003 90004 Brushless motors are taking over! Ok, maybe that was an overstatement.However, brushless motors have begun to dominate the hobby markets between aircraft and ground vehicles. Controlling these motors had been a hurdle up until microcontrollers became cheap and powerful enough to handle the task. There is still work being done to develop faster and more efficient controllers to unlock their amazing potential. Without brushes to fail, these motors deliver more power and can do so silently. Most high-end appliances and vehicles are moving to brushless systems. One notable example is the Tesla Model S.90005 90002 The Anatomy of a Brushless Motor 90003 90004 To better understand how one works, let’s start by tearing down a simple brushless motor. These are commonly found on remote control airplanes and helicopters. 90005 90010 90011 Windings — Converts electricity to a magnetic field that drives the rotor 90012 90011 Contacts — Brings power from the controller to the windings 90012 90011 Bearings — Minimizes friction for the axle 90012 90011 Magnets — Provide a magnetic field for the windings to attract and repel 90012 90011 Axle — Transfers the mechanical power of the motor to the user application 90012 90019 90002 Theory of Operation 90003 90004 The mechanics of a brushless motor are incredibly simple.The only moving part is the the rotor, which contains the magnets. Where things become complicated is orchestrating the sequence of energizing windings. The polarity of each winding is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity, giving each winding a «push / pull» effect. The trick is keeping this pattern in sync with the speed of the rotor. There are two (widely used) ways this can be accomplished.Most hobby controllers measure the voltage produced (back EMI) on the un-energized winding. This method is very reliable in high velocity operation. As the motor rotates slower, the voltage produced becomes more difficult to measure and more errors are induced. Newer hobby controllers and many industrial controllers utilize Hall effect sensors to measure the magnets position directly. This is the primary method for controlling computer fans. 90005 90002 Pros 90003 90010 90011 Reliable 90012 90011 High speed 90012 90011 Efficient 90012 90011 Mass produced and easy to find 90012 90019 90002 Cons 90003 90010 90011 Difficult to control without specialized controller 90012 90011 Requires low starting loads 90012 90011 Typically require specialized gearboxes in drive applications 90012 90019 90002 Stepper Motors — Simply Precise 90003 90004 Stepper motors are great motors for position control.They can be found in desktop printers, plotters, 3d printers, CNC milling machines, and anything else requiring precise position control. Steppers are a special segment of brushless motors. They are purposely built for high-holding torque. This high-holding torque gives the user the ability to incrementally «step» to the next position. This results in a simple positioning system that does not require an encoder. This makes stepper motor controllers very simple to build and use. 90005 90002 The Anatomy of a Stepper Motor 90003 90004 To better understand how one works, let’s start by tearing down a simple stepper motor.As you can see, these motors are built for direct drive loads containing a few key components. 90005 90010 90011 Axle — Transfers the mechanical power of the motor to the user application 90012 90011 Bearings — Minimizes friction for the axle 90012 90011 Magnets — Provide a magnetic field for the windings to attract and repel 90012 90011 Poles — Increases the resolution of the step distance by focusing the magnetic field 90012 90011 Windings — Converts electricity to a magnetic field that drives the axle 90012 90011 Contacts — Brings power from the controller to the windings 90012 90019 90002 Theory of Operation 90003 90004 Stepper motors behave exactly the same as a brushless motor, only the step size is much smaller.The only moving part is the the rotor, which contains the magnets. Where things become complicated is orchestrating the sequence of energizing windings. The polarity of each winding is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity, giving each winding a «push / pull» effect. A notable difference is how the magnet structure of a stepper is different. It is difficult to get an array of magnets to behave nicely on a small scale.It’s also very expensive. To get around this, most stepper motors utilize a stacked plate method to direct the magnetic poles into «teeth». 90005 90004 In a brushless motor, back EMF is used to measure velocity. A stepper relies on the short throw of each winding to «guarantee» it reaches the desired point in time. In highspeed travel, this can lead to stalling where the rotor can not keep up with the sequence. There are ways around this, but they rely on a higher understanding of the relationship between motor windings and inductance.90005 90002 Pros 90003 90010 90011 Excellent position accuracy 90012 90011 High holding torque 90012 90011 High reliability 90012 90011 Most steppers come in standard sizes 90012 90019 90002 Cons 90003 90010 90011 Small step distance limits top speed 90012 90011 It’s possible to «skip» steps with high loads 90012 90011 Draws maximum current constantly 90012 90019 90002 Linear Motors — The Future !!! 90003 90004 The future is linear! In high-speed pick and place machines speed is everything.With speed comes friction, with friction comes maintanence, with maintanance comes downtime, with downtime comes lost productivity. By removing the components needed to transfer rotary to linear motion, the system becomes much lighter and more efficient. Linear motors are simple to maintain, and, with only one moving part, are incredibly reliable. Did I mention they are incredibly fast ?! This is the pick and place machine we are using in production, and it is incredibly fast! This machine also packs such a punch, there is a warning for pacemakers on it.There is an entire row of high-power, rare-earth magnets. 90005 90002 The Anatomy of a Linear Motor 90003 90004 To better understand how one works, let’s look inside our pick and place machine downstairs. 90005 90010 90011 Motion Module — Contains electromagnets and controller. 90012 90011 Magnets — Provide a magnetic field for the coils to attract and repel 90012 90011 Linear Bearning — Keeps the motor in alignment with magnets and is the only moving part. 90012 90019 90002 Theory of Operation 90003 90004 The mechanics of a linear motor is nearly identical to a brushless motor.The only difference is if you were to take a brushless motor and unfold it into a straight line you’d have a linear motor. The Motion Module is the only moving part. Where things become complicated is orchestrating the sequence of energizing coils. The polarity of each coil is controlled by the direction of current flow. The animation demonstrates a simple pattern that controllers would follow. Alternating current changes the polarity giving each coil a «push / pull» effect. In a linear motor, there is typically an encoder or some advanced positioning system to keep track of the location of the Motion Module.To reach a high position accuracy, the controllers are much more complicated than anything found on a conventional system. Microstepping is a method to «throttle» the magnets to provide smooth and precise motion. To achieve this though, linear motors require a highly specialized controller tuned for each motor. As controller technology improves, we are likely to see these motors decrease in price. Maybe someday our 3D printers will print in seconds and not hours! 90005 90002 Pros 90003 90010 90011 Reliable 90012 90011 High speed 90012 90011 Efficient 90012 90011 No rotary to linear conversion required 90012 90019 90002 Cons 90003 90010 90011 Expensive 90012 90011 Require custom controllers 90012 90011 Purpose built for each system 90012 90011 Did I mention expensive? 90012 90019 90002 Resources and Going Further 90003 90004 So we took a look at some different types of motors and how they might be used.Selecting a motor will require you to first determine the application requirements. With these requirements, you can look at the strengths and weaknesses of each motor type. But more importantly, look for the ratings on each motor. Each motor will have values for input power and output power. You can calulate the load requirements of a system but, sometimes it’s easy enough to just try it! To give yourself a headstart integrating motors, take a look as some of these pages: 90005 90004 And finally, here is a great place to learn just about everything physics related.90005 .Похожие записи
