Как работает контроллер BLDC-двигателя. Какие минимальные ресурсы нужны микроконтроллеру для управления BLDC. Как оптимизировать схему управления BLDC-мотором. Какие особенности имеет система управления бесколлекторным двигателем. Какие компоненты входят в состав контроллера BLDC.
Основные компоненты системы управления BLDC-мотором
Типичная система управления бесколлекторным двигателем постоянного тока (BLDC) включает следующие основные компоненты:
- Микроконтроллер
- Датчики положения ротора (обычно датчики Холла)
- Трехфазный силовой каскад
- Цепи обратной связи по току
- Элементы пользовательского интерфейса (потенциометр задания скорости, кнопки управления)
Рассмотрим подробнее, какие минимальные ресурсы требуются микроконтроллеру для эффективного управления BLDC-мотором.
Минимальные требования к ресурсам микроконтроллера
Для реализации базового алгоритма управления BLDC-двигателем микроконтроллер должен обладать следующими возможностями:

- Не менее 6 выходов ШИМ для управления силовыми ключами
- 3 входа для подключения датчиков положения ротора
- 1-2 аналоговых входа для измерения тока и напряжения
- 1-2 входа/выхода общего назначения для пользовательского интерфейса
- Таймер для формирования ШИМ и измерения скорости
- Достаточная производительность для реализации алгоритмов управления
Оптимизация схемы управления BLDC-мотором
Существует несколько способов оптимизировать схему управления и снизить требования к ресурсам микроконтроллера:
- Использование многофункциональных выводов микроконтроллера
- Применение бездатчиковых алгоритмов управления
- Интеграция пользовательского интерфейса в силовую часть
- Использование специализированных драйверов BLDC-моторов
Рассмотрим эти способы подробнее.
Использование многофункциональных выводов
Современные микроконтроллеры часто имеют выводы с несколькими функциями. Это позволяет, например, использовать один и тот же вывод как для ШИМ-выхода, так и для измерения тока. Такой подход позволяет существенно сократить количество задействованных выводов.

Бездатчиковые алгоритмы управления
Бездатчиковые алгоритмы позволяют определять положение ротора без использования датчиков Холла, анализируя обратную ЭДС в обмотках двигателя. Это позволяет исключить 3 входа для датчиков, но требует более сложных алгоритмов и дополнительных вычислительных ресурсов.
Интеграция пользовательского интерфейса
Элементы пользовательского интерфейса (кнопки, потенциометры) можно подключить непосредственно к силовой части, используя простые схемы на дискретных компонентах. Это позволит разгрузить микроконтроллер от обработки этих сигналов.
Специализированные драйверы BLDC-моторов
На рынке доступны интегральные драйверы BLDC-моторов, которые берут на себя часть функций по управлению силовыми ключами и формированию ШИМ-сигналов. Это позволяет использовать более простые микроконтроллеры для реализации алгоритмов управления верхнего уровня.
Особенности реализации системы управления BLDC
При разработке системы управления BLDC-мотором следует учитывать несколько важных аспектов:
- Выбор частоты ШИМ в зависимости от параметров двигателя и требований к управлению
- Реализация защиты от перегрузки по току и напряжению
- Обеспечение плавного пуска и останова двигателя
- Реализация различных режимов работы (с постоянной скоростью, с постоянным моментом и т.д.)
- Оптимизация алгоритмов управления для снижения пульсаций момента и повышения КПД
Правильный учет этих факторов позволит создать эффективную и надежную систему управления BLDC-мотором даже при использовании микроконтроллера с ограниченными ресурсами.
Заключение
Разработка контроллера для BLDC-двигателя требует комплексного подхода к выбору микроконтроллера и оптимизации схемы управления. Грамотное использование ресурсов микроконтроллера и применение современных методов управления позволяет создавать эффективные системы даже на базе недорогих компонентов.
При этом важно помнить, что конкретные требования к ресурсам микроконтроллера могут существенно различаться в зависимости от специфики применения BLDC-мотора и требуемых характеристик системы управления.
Мотор из генератора своими руками | Делаем электродвигатель | КРОТ.NET — Еженедельный Журнал
Многие из нас, видя проезжающие по городу электро- скутеры, велосипеды или самокаты, с завистью оборачиваются вслед. Еще бы, пользоваться любимым транспортным средством прилагая минимум усилий – мечта каждого. Вот только стоят они весьма недешево. Вот тут-то и возникает мысль: а нельзя ли переделать свой велосипед в электрический?
Необходимым элементом для переделки является безщеточный мотор постоянного тока (BLDC), но его цена на рынке достаточно высока. В нашей статье мы расскажем вам, как сделать такой мотор из генератора своими руками. Это значительно уменьшит расходы на переделку велосипеда. Ведь б/у генератор в хорошем состоянии можно недорого купить на любой автомобильной разборке.
Для того, чтобы сделать мотор из генератора, вам понадобятся:
- старый автомобильный генератор;
- плоскогубцы, набор ключей и отверток;
- контроллер регуляторов оборотов;
- паяльник;
- провода;
- две аккумуляторные батареи на 6В;
- мультиметр;
- подшипники (при необходимости их замены).
1
Раскручиваем четыре длинных болта, соединяющих генератор.
2
Отсоединяем регулятор напряжения (реле-регулятор в сборе со щетками) и снимаем его.
Источник: https://youtu.be/y3qCx2JCIeo
3
Придерживая шкив, отворачиваем гайку крепления и снимаем его.
4
Снимаем все шайбы, крыльчатку и вынимаем шпонку.
Источник: https://youtu.be/y3qCx2JCIeo
5
Снимаем переднюю крышку, вынимаем ротор с коллектором и подшипники.
Источник: https://youtu.be/y3qCx2JCIeo
Если подшипники износились – замените их на аналогичные.
6
Откручиваем статор от задней крышки и выпрямительного блока и вынимаем его.
7
Отсоединяем и удаляем блок выпрямителей (диодный мост).
Источник: https://youtu.be/y3qCx2JCIeo
8
Зачищаем и соединяем в «треугольник» выводы обмоток статора.
9
Залуживаем их и припаиваем к ним провода.
Источник: https://youtu.be/y3qCx2JCIeo
10
Отсоединяем два контакта реле-регулятора от щеток и так же припаиваем к ним провода.
Источник: https://youtu.be/y3qCx2JCIeo
Шаг 2. Собираем мотор1
Соединяем провода статора в жгут и вставляем его в заднюю крышку.
Источник: https://youtu.be/y3qCx2JCIeo
2
Ставим на место ротор с коллектором и подшипниками, надеваем переднюю крышку и стягиваем все длинными болтами.
3
Присоединяем на место щеточный блок.
Источник: https://youtu.be/y3qCx2JCIeo
4
Ставим на место шпонку, одеваем крыльчатку, шайбы и шкив и затягиваем все гайкой.
Шаг 3. Проводим испытаниеПеред подключением источников питания к мотору обязательно проверьте мультиметром отсутствие межвиткового короткого замыкания, а также пробивания на корпус!
1
Подключаем выводы со щеток мотора к одному аккумулятору, а выводы со статора, через контроллер регуляторов оборотов – к другому.
2
В результате мы из старого автомобильного генератора получили BLDC мотор с возможностью регулировки оборотов.
Источник: https://youtu.be/y3qCx2JCIeo
Если вам понравилась наша статья, поставьте лайк 👍
✔️ Подписывайтесь на сайт, чтобы не пропустить ничего интересного!⚡
Больше фотографий и видеоконтента на сайте https://krrot.net
Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление — Avislab
29.06.2018
Коментарі:Сергей говорить:
08.08.2018 10:17
Андрей, у вас в статье «Схема регулятора скорости бесколлекторного двигателя (ESC)» на Atmega168 в рисунке допущена ошибка. А именно: неправильно подписаны выходы логических элементов. Только заглянув в исходник (там на рисунке всё правильно) я нашёл ошибку из за которой у меня сгорело несколько irs2186 и транюков(но это мои косяки). Вместо WH WL VH VL UH UL Сверху вниз должно быть WL VL UL WH VH UH. Прошивал первой версией hex. New не пробовал.
Андрей говорить:
28.08.2018 23:39
Доброго времени суток, хочу построить контроллер с векторным управлением для BLDC мотора с датчиками холла на STM32 40 кВт. В вашем проекте реализовано векторное управление? Спасибо!!!
andre говорить:
29.08.2018 07:26
Материал о векторном управлении планируется позже.
Борис говорить:
30.09.2018 09:55
Здраствуйте Андрей, я начинаю разбираться с векторным управлением для Sensorless BLDC, хочу разработать плату управления внешним блоком инверторного кондиционера, на каком этапе у Вас изучение векторного управления? Что уже получилось?
andre говорить:
01.10.2018 08:02
Добрый день, Борис. К сожалению, по бездатчиковым моторам я вряд ли Вам помогу. Как-то у меня с ними с самого начала не заладилось… и я все больше тяготею к моторам с датчиками. Мои скромные успехи я стараюсь публиковать на блоге и youtube. Правда, с запозданием в несколько месяцев… По векторному управлению я только начал «наступать на первые грабли». Похвастаться пока особо не чем, зато уже знаю как делать не надо 🙂
Александр говорить:
22.11.2018 15:08
Объясните тупику, зачем нужно контролировать положение ротора? По факту если начать коммутировать ключи, то ротор сам должен подтянуться за магнитным полем возбуждаемым ключами.
andre говорить:
22.11.2018 17:01
Вот тут https://youtu.be/tjmou9dtxBg подробно рассказываю.
03.06.2020 04:41
Доброго времени суток. Спасибо за материал! Это единственный источник практических знаний по данной теме который мне удалось найти в сети, с примерами и разложенный по полочкам для людей. Очень жду продолжения про FOC. Из аппнотов не все понятно,а в Вы очень доступно излагаете. Основываясь на Ваших примерах сделал контроллер для самоката на 1кВт. Правда пришлось сделать так что бы при нулевом газе мотор отсоединялся земли, ибо транзисторы верхнего плеча радостно делали БАХ при езде накатом ). Очень жду продолжения.
Додати коментар
Собираем сервопривод на BLDC под Mach 3. (Assembling a servo on BLDC for Mach 3)
Ссылка на видео на YouTube https://www.youtube.com/watch?v=gRGOAKG3-xc
Материалы для скачивания https://drive.google.com/open?id=1vDNe7v3wYZje3EMbLtHv24kfpGZmkDoN
Сегодня запускаем двигатель BLDC (Brush Less Direct Current). Переводится аббревиатура, как «Без щеток, постоянного тока». Поскольку BLDC не способен сам по себе работать в шаговом режиме, а просто покрутить вал не так интересно, мы сделаем простой, но полноценный сервопривод. Данный сервопривод протестируем в режиме контура скорости, также запустим его в режиме контура положения, посмотрим на режим удержание положения, а также подключим наш сервопривод к Mach 3 и посмотрим, как он будет работать Mach 3.
В качестве контроллера возьмем Arduino DUE. Предвижу шквал критики в свой адрес по поводу контроллера, но цель данного видео не сделать промышленный вариант сервопривода, а показать принцип работы двигателя BLDC и принцип построения сервопривода. Для этих целей, на наш взгляд нужно использовать наиболее простое наглядное решение. Поэтому DUE. Также для критиков сразу отмечу, что мы не делаем сервоприводов на arduino. В данном видео мы сделаем анализ почему обычные контролеры не подходят для построения промышленных приводов и каким требованиям должен удовлетворять контроллер, для построения промышленного привода.
Прототип промышленного сервопривода мы разберем в третьем видео, в котором будет запускать двигатель PMSM. Как учили в учебном заведении, прежде чем что-то сделать, нужно провести обзор литературы. Мы поступим примерно таким же способом. Вскроем сервопривод Leadshine, сервопривод Hiwin и частотник Delta и посмотрим какие контроллеры установлены в промышленных приводах. Забегая вперед, скажу, что это будут не Atmel не PIC и не STM. PMSM мы будем запускать на таком же контроллере, который установлен в сервоприводах Hiwin серии D2.
Итак поехали.
1. Сам двигатель. Это будет двигатель от сервопривода Leadshine – ACM 604. Мощностью 400 Вт. Благодаря наличию датчиков холла, мы сможем его запустить в режиме BLDC. Также данный двигатель содержит инкрементный энкодер с количество рисок 2500. Выход инкрементного энкодера – это квадратурный дифференциальный сигнал A B и индексной меткой Z в соответствии со стандартом RS-422. Сигналы с датчиков Холла – U V W также дифференциальные. Дифференциальные сигналы являются более помехозащищенными по сравнению с обычными TTL и передаются по витым парам. Силовая часть запитывается на три фазы. По энкодеру мы будем отслеживать положение вала двигателя, по датчикам холла будет определяться положение постоянных магнитов относительно обмоток статора.
2. Драйвер бесколлекторных двигателей. Будем использовать DRV8323 от Texas Instruments. Этот драйвер с обвязкой распаян вот на такой платке. Цена платы в магазине TI 79$. Тянет эта платка 15 ампер в длительном режиме на напряжении до 54В, а это целых 810 Вт, так, что на наш двигатель с двукратным запасом хватит. Mosfet-ы от TI поражают, вот эти чипы тянут 15 ампер без каких-либо радиаторов. Конфигурируется драйвер по шине SPI. Драйвер имеет встроенный управляемый преобразователь напряжения и сконфигурирован на данной плате на 3,3В с током до 650 mA. Питается этот преобразователь от напряжения питания двигателя. Силовое питание драйвера и двигателя подключается вот к этим клеммам, к этим клеммам подключаются силовые обмотки двигателя. Особенностью данного драйвера, является, то, что он может работать в режиме PWMx1. Это как раз тот режим, что нам нужен, плюс ко всему драйвер имеет встроенную логическую таблицу на переключение Mosfet-ов в зависимости от положения ротора двигателя, т.е. от сигналов с датчиков холла. Причем делает это на аппаратном уровне, а не на уровне контроллера в цикле, съедая и без того драгоценные вычислительные ресурсы контроллера.
3. Далее нам потребуется Arduino DUE. Один из самых быстрых контроллеров в семействе ардуино. Одной из самых важных характеристик сервопривода – это время серво цикла, т.е. время за которое контроллер получил данные обработал их и выдал управляющее воздействие. Чем меньше данное время, тем лучше регулирование и тем более качественным считается сервопривод. Поэтому берем контроллер побыстрее.
4. Для подсчета импульсов квадратурного энкодера нам нужен счетчик. Имея максимальную скорость двигателя по каталогу 4500 об/мин и разрешение энкодера в 2500 рисок нам нужно считать импульсы с частотой 4500/60*2500*4 = 750 кГц. (а если бы количество рисок было 5000, то мы бы получили все 1,5 МГц.). Понятно, что обычный контроллер не сможет считать импульсы с такой скоростью. Для этих целей возьмём аппаратный счетчик для квадратурных сигналов. Микросхемка называется IC-MD. Имеет разрядность счетчика до 48 бит и может считать импульсы с частотой до 40 МГц. Данная микросхема на вход может принимать сразу дифференциальный сигнал, чем мы и воспользуемся. Получать данные с квадратурного счетчика наша Arduino будет по SPI.
5. Далее нам потребуется высокоскоростной квадратурный дифференциальный линейный ресивер AM26LV32. Работает на частоте 32 МГц, напряжение питания 3,3 В. Дело в том, что драйвер DRV8323 принимает на вход датчиков холла сигналы TTL, а как мы помним с двигателя у нас идут дифференциальные сигналы RS-422. Квадратурный ресивер будет принимать на вход дифференциальный сигнал, а выдавать TTL, по сути, выполнять функцию преобразования сигналов.
6. Поскольку мы задались целью также подключить наш сервопривод к Mach 3 и поуправлять приводом с его помощью, нам потребуется любой контроллер для Mach 3. Я буду использовать самый простой USB контроллер, который на выходе эмулирует обычный 25 пиновый LPT порт. С данного порта мы заберем два сигнала. Первый сигнал – это Step. Он у нас будет на втором пине. И второй сигнал – это DIR он у нас будет на 6-м пине. И не забываем землю. Максимальная частота импульсов Step с данного контроллера 100 кГц. Не очень много, но для теста нам хватит. Для того чтобы раскрутить наш двигатель на максимальные обороты, нам необходимо 750 кГц. При коэффициенте делителя 1 к 1. Например в своих станках мы используем, в том, числе контроллер SmoothStepper, который способен выдавать сигнал Step с частотой до 4 МГц.
7. Далее нам потребуется еще один счетчик, который будет считать импульсы Step/Dir. Для этих целей возьмем микросхемку LS7366 – это 32 битный квадратурный счетчик, способный считать импульсы с частотами до 20 или 40 МГц, в зависимости от питающего напряжения. Данная микросхема в отличии от IC-MD требует некоторой обвязки, поэтому воспользуемся готовым модулем от SuperDroidRobotics. Данная микросхема умеет сразу считать Step/Dir, хотя если немного подумать, то эту же функцию можно осуществить и на микросхеме IC-MD. Наш контролер также будет получает значение счетчика по SPI.
8. Из необходимого нам еще потребуется три светодиода, кнопка, два сопротивления 1,2 кОм, три сопротивления 500 ом. Два сопротивления 4,7 кОм.
(Схема доступна по ссылке ниже)
Электрическая схема серводрайвера, а также схемы на все модули и даташиты будут доступны по ссылке под видео.
Собирать будем по этапам.
На первом этапе
Подключим дифференциальный приемник к датчикам холла и включим светодиоды через сопротивления 500 Ом на выходы дифф. приемника, чтобы видеть визуально, как будут срабатывать датчики холла.
Для подключения энкодера двигателя к макетной плате я сделал вот такую распайку. Здесь, две группы. Первая группа это квадратурный энкодер, вторая группа, это датчики холла.
Питать цифровую часть нашего серводрайвера будет 3,3 вольтами от преобразователя, который встроен в драйвер DRV8232.
Сам драйвер будем питать от лабораторного блока питания напряжением 42В.
Включаем питание. Медленно проворачивая вручную вал двигателя, можно видеть, как срабатывают датчики холла. Три датчика имеют всего 6-ть логических положения, положения в котором все датчики включены или выключены логически исключены. Можно видеть, что за один полный оборот вала двигателя датчики проходят 4-е полных цикла, что свидетельствует о том, что в двигателе 4-е пары полюсов.
На втором этапе
Подключим наш квадратурный счетчик и Arduino. Терминальные резисторы устанавливать не будем ввиду того, что длина дифференциальной линии мала. Сконфигурируем счетчик энкодера по SPI на разрядность счета в 32 бит. Исходный код для Arduino я также выложу под видео. Будем в бесконечном цикле с периодичностью в 1 секунду считывать показания счетчика и выводить их в консоль. Посмотрим, как это работает. Можно видеть, что примерно один полный оборот вала двигателя соответствует 10000 импульсов. У данного счётчика есть особенность, первые два импульса индексной метки он сбрасывается, таким образом он калибрует количество импульсов между Z метсками.
На третьем этапе
Подключим драйвер мотора. Датчики холла подключим к контактам на боковых пинах. У драйвера есть отдельные пины для подключения датчиков холла, но они не подключены на самой плате. Посмотрим на схему. Если есть желание подключить датчики холла именно к этим пинам нужно будет вооружившись паяльником впаять сюда перемычки. Сигнал ШИМ будем брать с 9 пина Arduino. Также нужно не забыть про Enable. В отличии от драйвера шагового мотора DRV8711, который мы запускали в первом видео, у нашего драйвера DRV8323 SPI не будет работать, если не подан сигнал Enable. Также подключим кнопку, она будет задавать направление.
Конфигурируем драйвер на режим PWMx1. Зададим некоторое значение ШИМ. ШИМ будем задавать с разрядностью 12 бит. С периодичностью в 1 секунду будем выводить значение счетчика энкодера в консоль. Прошиваем ардуино и видим, как двигатель начал вращаться. Кнопка меняет направление вращения мотора.
Важным моментом при запуске BLDC мотора, является соблюдение правильного подключения фаз двигателя и чередования датчиков холла. Правильное подключение также можно найти опытным путем. Подключаем фазы двигателя произвольным образом, а конфигурацию датчиков холла подбираем опытным путем. Ток при этом, который задается ШИМ сигналом, желательно установить как можно меньше, ну это так, чтобы двигатель не скакал как сумасшедший. Всего конфигураций подключения датчиков холла 6 их можно просто перебрать. Положение, в котором двигатель вращается с самым минимальным заданным током и не имеет мертвых зон (т.е. положений ротора в которых мотор останавливается) и является правильным.
Одним из недостатков режима BLDC от PMSM, является, то, что поле статора изменяет направление дискретно, что вызывает скачкообразное изменение момента двигателя, а также сопровождается незначительной вибрацией при работе двигателя. Да этот эффект несколько нивелирован увеличением количества пар полюсов двигателя, но он все равно присутствует. Попробуем увидеть этот эффект. Для этого заставим вращаться мотор максимально медленно. Можно видеть, как при переключении датчиков холла происходит скачкообразное изменение скорости вращения двигателя.
Теперь немного теории, что такое сервопривод и почему его основная настройка – это коэффициенты ПИД регулятора.
(рисуем схему)
Возможно, Вы знаете, что сервопривод может работать в трех режимах:
1. Режим поддержания заданного момента на валу.
2. Режим поддержания заданной скорости.
3. Режим следования заданного положения.
Давайте разберемся как это достигается. Каждый из этих режимов реализуется так называемым контуром регулирования, контур регулирования момента, скорости и положения.
Рассмотрим на примере контура регулирования скорости. Мы задали некоторое значение скорости, которое хотим достигнуть, сервопривод это значение сравнивает с текущим значением и посредством ПИД регулятора осуществляет регулирование. Далее опять сравнивает заданное значение (причем это значение могло уже измениться, мы уже могли задать новое) с текущим значением и опять осуществляет регулирование посредством ПИД регулятора. Таким образом сервопривод циклично сравнивает текущее значение скорости с заданным и осуществляет регулирование посредством ПИД регулятора. Именно время на такую итерацию и называется временем сервоцикла. Логично, что чем меньше время сервоцикла, тем лучше мы осуществляем регулирование и быстрее достигаем заданного значения. Величина обратная времени называется частотой сервоцикла. Эта частота разная для разных контуров регулирования, как правило, выше всего для момента (или что тоже самое – тока), у контура положения меньше и у контура скорости медленнее всего. Для применения в ЧПУ наибольший интерес представляет частота сервоцикла контура положения. В китайских сервоприводах частота сервоцикла составляет 500 Гц, в сервоприводах среднего класса Delta Hiwin 1-1,5 кГц. В Yaskawa и Panasonic – это 5-6 кГц. В Специализированных контроллерах 20-25 кГц.
Поскольку регулирование в сервоприводе осуществляется посредством ПИД регулятора, рассмотрим кратко, что такое ПИД регулятор.
(Схема доступна по ссылке ниже)
ПИД регулятор — это, по сути, математический алгоритм, который рассчитывает корректирующее воздействие, т.е. например на сколько нам нужно увеличить текущую скорость, чтобы достигнуть заданную. Величина корректирующего воздействия состоит из трех составляющих, пропорциональной, интегральной и дифференциальной. Данные составляющие входят в регулирование с некоторыми коэффициентами Kp, Ki, Kd (пропорциональный коэффициент, интегральный и дифференциальный). Чем больше коэффициенты, тем быстрее регулирование и жёстче система, но тем больше вибраций и ее неустойчивость. Именно подбор этих коэффициентов и является основной настройкой сервопривода. Эти коэффициенты разные для разных контуров регулирования.
Запустим контур скорости. Для этого мы будем сачить скорость двигателя, сравнивать полученное значение с заданной скоростью, рассчитывать ПИД регулятором корректирующее воздействие, задавать его. И будем делать это в бесконечном цикле.
Давайте запустим наш двигатель в режиме контура скорости. Зададим скорость в 40000 импульсов в /секунду (это 4 оборота в секунду).
Если я пытаюсь остановить двигатель рукой, то драйвер начинает увеличить ток, но при этом скорость остается неизменной в пределах погрешности регулирования.
Аналогично контуру скорости мы можем сделать контур положения. Для этого будем считывать текущее положение с энкодера, рассчитывать ПИД регулятором корректирующее воздействие, задавать его и будем делать это в бесконечном цикле. Если заданное положение будет равно 0, то соответственно при попытке провернуть вал двигателя, серво драйвер будет пытаться вернуть вал мотора в исходное положение. Оценим также время серво цикла в этом режиме.
Добавим в нашу схему контроллер для Mach 3 и счетчик импульсов Step/Dir. Значение с данного счетчика будем читать в Arduino по SPI. Таким образом будем задавать значение для ПИД регулятора. Оценим также время серво цикла в этом режиме. В Mach 3 зададим количество импульсов на 1 мм = 2000, ускорение 500 мм/с2, скорость максимальную 2250 мм/мин. Данная величина скорости ограничена максимальной частотой импульсов step используемого контроллера.
К сожалению, Arduino не позволяет силами своего АЦП построить контур тока. Драйвер двигателя выдает аналоговый сигнал пропорциональный току, но для того, чтобы его включить в АЦМ нужно также подать опорное напряжение. DUE отказалась работать с внешним опорным напряжением, да и считать нужно ток в каждой из фаз, а для каждой из фаз свое опорное напряжение.
1. Аппаратные счетчики энкодера и Step/Dir. (быстродействие от 20 МГц)
2. Быстродействующие АЦП. (разрядность не менее 16 bit, скорость не менее 40 ksps).
3. Высокоскоростной 6х канальный ШИМ, разрядность не менее 16 bit и частота не менее 50 кГц.
4. Аппаратный ПИД.
5. Аппаратный FOC (Field Orientation Control).
6. Частота сервоцикла по положению 5 кГц.
Бесколлекторный мотор BLDC 2212-920KV CCW
Бесколлекторный мотор (BLDC) 2212 920KV CCW. Моторы этого типа отличаются от обычных моторов A2212 наличием на валу пазов, предохраняющих пропеллер от проворачивания, а также имеют резьбу для зажимной гайки.
Резьба CCW (counterclockwise), т.е. левая (обратная) резьба, гайка черного цвета.
Моторы 2212-920KV CCW совместимы с двигателями, используемыми в квадрокоптерах DJI Phantom. Они могут устанавливаться на квадро-, гекса-, и оптокоптеры с диагональю рамы от 330 до 550мм (в том числе F330, F450, F525, F550).
Наличие резьбы позволяет использовать самозатяжные пропеллеры.
Характеристики:
| Рабочее напряжение | 7.4…11.1В (2-3S) |
| Максимальный ток | 12А |
| Ток холостого хода при U=10В | 500 мА |
| Число оборотов на вольт | 920 |
| Тип исполнения BLDC | outrunner |
| Рекомендуемые пропеллеры | 8040…1045 |
| Диаметр вала | 7.9мм + резьба М6 |
| Расстояние между крепежными отверстиями | 16х19 мм |
| Вес (с гайкой) | 56 г |
Комплектация:
- 1х мотор BLDC 2212-920KV CCW
- 1х зажимная гайка
Дополнительная информация:
Если Вы собираете квадрокоптер в первый раз, рекомендуем сначала посмотреть следующие видео. Они помогут Вам сформировать понимание основных вопросов коптеростроения и избежать стандартных ошибок.
Видео 1: Квадрокоптер своими руками — часть I. Что понадобится.
Видео 2: Квадрокоптер своими руками — часть II. Соберем, попробуем взлететь.
Видео 3: Квадрокоптер своими руками — часть III. — Первый полет
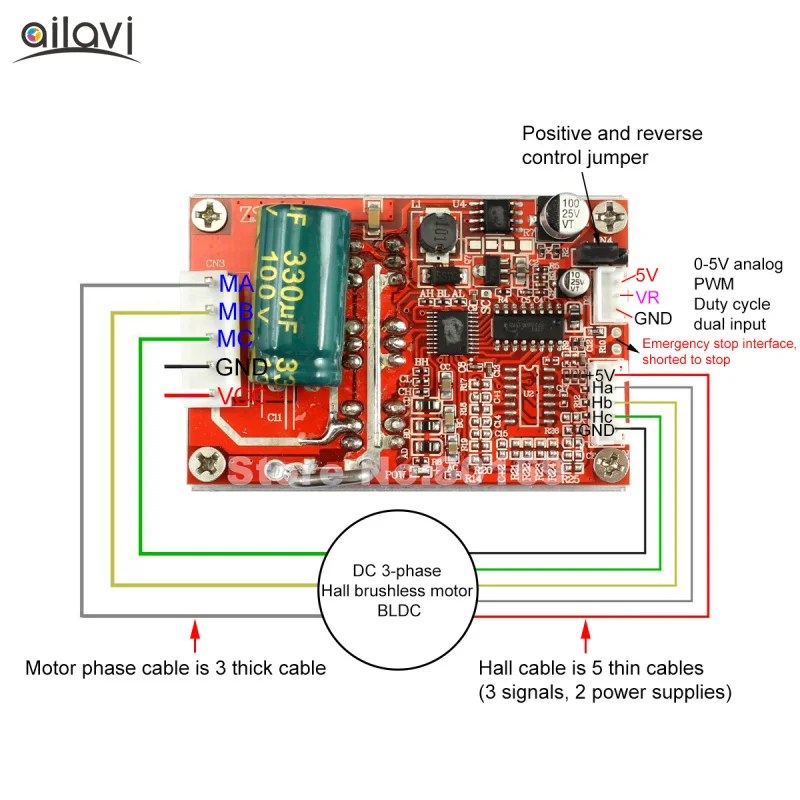
Контроллер трехфазного бесколлекторного двигателя
Каковы должны быть минимальные ресурсы микроконтроллера, работающего в составе привода трехфазного BLDC-мотора? Для ответа на этот вопрос необходимо соотнести возможности чипсета с принципами управления указанного двигателя и предъявляемыми к устройству функциональными требованиями. Если мы рассматриваем рынок простых и дешевых схем управления скоростью в таких применениях, как вентиляторы и насосы, то проблема может быть существенно упрощена. Эти устройства работают при наличии или отсутствии датчиков (необходимых для определения положения ротора), что имеет ряд аргументов «за» и «против». Однако по количеству контактов I/O существенный выигрыш получается в случае, если сигнал положения ротора может быть снят с одного вывода. Кроме того, наличие многофункциональных выходов в пользовательском интерфейсе позволяет изменять их назначение. Благодаря этому, используя определенную технику минимизации, можно сократить количество задействованных контактов процессора и снизить таким образом требования к его ресурсам.
Система управления BLDC-мотором
На рис. 1 приведена блок-схема управления BLDC-мотором, содержащая датчик Холла для формирования обратной связи по положению ротора (как правило, используется три датчика), потенциометр задания скорости, кнопки включения и выключения системы, датчик перегрузки по току и трехфазный силовой каскад, соединенный с мотором.
Рис. 1. Блок-схема управления BLDC-мотором
Общее количество независимых подключений контроллера составляет 11 (пять входов и шесть выходов). Это число можно минимизировать в случае, если микроконтроллер поддерживает многофункциональность выводов и имеет развитую периферию.
Технология минимизации ресурсов
В случае, если используется стандартный шестиступенчатый алгоритм управления BLDC-мотором, в каждый момент времени только два транзистора инвертора (один в верхнем плече и один в нижнем) находятся во включенном состоянии. Управление ключами трехфазного силового каскада не является комплиментарным, транзисторы открываются в т. н. «диагональном режиме». С точки зрения минимизации логики это является преимуществом, поскольку два из трех ключей верхнего уровня закрыты при нормальной работе привода. Сигнал управления третьим транзистором может быть извлечен из двух других с помощью нескольких резисторов и транзисторного инвертора, подключенного к третьему входу верхнего уровня моста (см. рис. 4 — принципиальная схема). Таким образом удается сократить количество использованных выводов контроллера с шести до пяти.
Существует несколько различных путей оптимизации количества системных входов, предназначенных для подключения датчиков Холла, потенциометра, сенсоров тока перегрузки и ключей «Пуск/ Стоп». Датчики Холла, как правило, встраиваются в BLDC-двигатель, поэтому целесообразно интегрировать в мотор и схему, формирующую цифровой интерфейс для их связи с микроконтроллером. Выход подобной схемы выполняется в виде откры- того коллектора с «подтягивающим» резистором. В этом случае требуется один датчик Холла и один цифровой вход микросхемы семейства PIC12F.
Для запуска мотора и задания скорости при включении системы один из входов верхнего плеча трехфазного инвертора может быть сконфигурирован как аналоговый вход. Для реализации данной задачи этот вывод подключается к резистивному делителю и потенциометру уставки, что позволяет задать и считать значение скорости перед пуском мотора.
Ключ «Пуск» кроме основной задачи может нести и дополнительную функцию снижения уставки скорости ниже минимального значения. В аналоговом режиме работы входа, несмотря на то, что один из транзисторов верхнего плеча открывается, это не приводит к появлению тока в двигателе, поскольку все ключи нижнего плеча закрыты. Далее, при пуске мотора, данный контакт конфигурируется как выход управления транзистором верхнего плеча, а резисторы делителя начинают выполнять функцию «подтягивающих» или заземляющих.
Функцию остановки запущенного двигателя удобно выполнять в комбинированном режиме «Пуск/Стоп» в ходе цикла коммутации. Таким образом, остановка мотора реализуется программно-аппаратным методом в процессе выбега. Когда ключ «Стоп» нажимается при вращении, все сигналы управления транзисторами верхнего уровня блокируются, программа анализирует состояние мотора и запускает режим торможения. В простейшем случае функция остановки может выполняться нормально-разомкнутым тумблером, подключенным параллельно описанной выше цепи защиты от токовой перегрузки.
В схеме защиты от перегрузки по току не задействован ни один из выводов I/O микроконтроллера, для этой цели используется цепь подключения питания микросхемы семейства PIC12, позволяющая включить схему в режим перезагрузки при возникновении аварии. Этот тип PIC-контроллера имеет встроенный параллельный стабилизатор, соединенный с источником питания через резистор, номинал которого выбирается в зависимости от условий работы. Таким образом, в случае перегрузки питание микросхемы может быть отключено схемой защиты по току, подключенной параллельно стабилизатору.
В результате проведенной оптимизации системе требуется один выделенный цифровой вход, а также один цифровой/аналоговый и четыре цифровых вывода, выполняющих функции выходов. Здесь не учтен тот факт, что для управления скоростью необходима широтно-импульсная модуляция напряжения, поступающего на BLDC-мотор. В нашем случае контрольные импульсы должны поступать на транзисторы нижнего уровня. В реальности, поскольку в системе используется режим шестиступенчатого управления, ШИМ-сигнал в любой момент времени подается только на один из трех нижних ключей инвертора.
Некоторые PIC-контроллеры обладают особой периферией, способной формировать программный «моторный» ШИМ-сигнал, в то время как другие могут вырабатывать ШИМ-напряжение только на одном из n выходов. В последнем случае полный сигнал управления формируется с помощью, например, периферии ECCP (Enhanced Capture/ Compare Peripheral). В микросхеме PIC12F допускается комбинированное формирование ШИМ-сигнала посредством периферии ECCP или в режиме альтернативной конфигурации выводов (APCFG). Подобная возможность представляется очень удобной, поскольку импульсы могут вырабатываться через ECCP только по двум выводам, в то время как для работы схемы их требуется три, что доступно в режиме APCFG. На сегодняшний день в описанном режиме могут работать два контроллера семейства: PIC12F615 и PIC12HV615 (рис. 2).
Рис. 2. Аппаратная реализация схемы
Программа управления использует сигнал одного датчика Холла для синхронизации импульсов управления транзисторами инвертора, а также для определения моментов времени коммутации по так называемой технологии точного расчета траектории. Помимо всего прочего, это позволяет сформировать замкнутый контур управления скоростью при помощи простейшего ПИД-регулятора, на который поступает сигнал ошибки по скорости (рис. 3).
Рис. 3. Блок-схема управления скоростью мотора
Выход PI-контроллера загружается в регистр коэффициента заполнения импульсов CCPR1, занимая восемь старших разрядов. Выход подсистемы формирования ШИМ-сигнала коммутируется вместе с одним из трех транзисторов нижнего плеча инвертора, что позволяет осуществлять управление мотором и контроль скорости.
Три встроенных таймера PIC12 используются для измерения скорости двигателя по сигналу датчика Холла (TMR1), задания периода коммутации (TMR2) и генерации прерывания после окончания периода предварительного расчета (TMR0).
При включении питания считывается уставка скорости, после чего система может быть запущена с помощью ключа «Пуск». После подачи команды на запуск привода происходит оценка положения ротора и активируется программа формирования короткой разомкнутой петли регулирования. Она работает до тех пор, пока не будет продетектировано появление следующего сигнала датчика Холла. С этого момента времени коммутация инвертора синхронизируется с положением ротора. После успешной обработки двух сигналов датчика Холла программа переключается в режим работы с замкнутой обратной связью по скорости. При возникновении перегрузки по току активируется режим перезапуска питания POR (Power On Reset).
Аппаратная реализация системы управления включает трехфазный BLDC-мотор, низковольтный силовой модуль инвертора и контроллер PIC12F615, подключенный к модифицированной демо-плате Microchip. Было показано, что данная топология схемы позволяет использовать шесть I/O контактов микроконтроллера с многофункциональными выводами. Гибкая внутренняя периферия PIC12HV615 и встроенный параллельный регулятор дают возможность создать схему (рис. 4), выполняющую все необходимые для данного применения функции. Таким образом, создана основа для проектирования простых и дешевых систем управления скоростью в случаях, когда не требуется высокая точность работы привода.
Рис. 4. Принципиальная схема привода BLDC-мотора с контроллером PIC12HV615
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Как собрать электроскутер своими руками: пошаговая инструкция
Электронные самоделки /24-янв,2018,02;09 / 11602Автор решил самостоятельно создать транспортное средство с электротягой, которое должно было стать ему помощником на даче. На этом средстве передвижения планировались удобные поездки по месту, к магазину, на озеро, по лесным дорогам.
Далее вы можете просмотреть все фотографии пошагового создания электроскутера своими руками.
Сборка электроскутера своими руками-поэтапно
12,6-вольтовую батарею емкостью 19200 mAh автор собрал, используя аккумуляторные элементы, которые стояли на ноутбуках.
Сначала мастер использовал вентиляторный двигатель, который стоял на иномарке – 12V на 450 Вт.Электроскутер своими руками: фото 3
Электроскутер своими руками: фото 4
Чтобы собрать раму скутера, умелец взял профильную трубу 20х20х2 мм.Электроскутер своими руками: фото 5
Было изготовлено крепление для мотора.Электроскутер своими руками: фото 6
Заднее колесо диаметром 360 мм автол взял от скутера.Электроскутер своими руками: фото 7
Для блока управления двигателем использованы транзисторы irf3205.Электроскутер своими руками: фото 8
Электроскутер своими руками: фото 9
В свою очередь были проведены токарные работы.
Автор купил звезды, предназначенные на мини-квадроцикл – переднюю с 7 зубьями и заднюю с 68.
Переднюю часть мастер использовал от детского велосипеда.Электроскутер своими руками: фото 12
Изготовлен натяжитель для цепи.
На этом видео продемонстрировано тестирование скутера на электротяге с двигателем 450 Вт.
После испытаний продолжили улучшать
Был покрашен диск заднего колеса.
Переделана аккумуляторная батарея.Электроскутер своими руками
Мастер собрал зарядное устройство для аккумулятора.Электроскутер своими руками
Электроскутер своими руками
Переделана рама.Электроскутер своими руками
Испытания показали, что электродвигатель потребляет ток 50–80 А. Поскольку это весьма большой показатель, автор принялся за установку вместо текущего мотора – нового, более мощного. Он купил трехфазный мотор BLDC 48v 1000 Вт.
Изготовлена площадка для аккумуляторной батареи.
На видео показаны испытания скутера уже с новым электродвигателем – на 1000 Вт.
При испытаниях автор замерил скорость, используя GPS.Электроскутер своими руками
Электроскутер своими руками
Установлены дисковые тормоза.
Рама была грунтована и покрашена.
Мы видим, как автор самостоятельно создал электрический скутер, и остался полностью довольным своим результатом. Это транспортное средство разгоняется до максимальной скорости 45 км/ч и может проехать на одном заряде 40 км.
Бесщеточный двигатель мощностью 45 кВт «Бесщеточные двигатели, 3-фазные инверторы, схемы
После успешного создания бесщеточного контроллера я решил также создать свой собственный бесщеточный двигатель. Программное обеспечение Autocad Inventor 3D CAD было использовано мной для создания 3D модели двигателя.
Перед тем, как начать что-то проектировать, вам необходимо знать необходимое число оборотов в минуту, необходимый крутящий момент, рабочее напряжение, максимальный ток. Эта формула предназначена для расчета крутящего момента, если у вас есть мощность и скорость. После считывания передаточного числа на Opel Agila выяснилось, что мне нужна скорость 4000 об / мин, чтобы достичь 73.4км / ч на 3-й передаче (в городе больше не надо). Я решил сделать двигатель с обратным ходом, потому что статор легче охладить, если он находится снаружи. Если сатор находится внутри, остыть сложнее. Недостатком является то, что вы теряете крутящий момент из-за меньшего диаметра ротора. Я выбрал дизайн с 48 прорезями (зубьями) и 40 магнитами, и у меня будет крутящий момент 142,5 Нм.
- Номинальная мощность: 45 кВт
- Номинальное напряжение: 230 В
- Номинальный ток: 200А
- Конфигурация обмотки: Delta
- об / мин: 2600
- Крутящий момент 165 Нм
- Конструкция: 48 слотов, 40 неодимовых магнитов
- Класс ламинирования M330
- Охлаждение: гликоль
- Вес: 17 кг
- Масса меди ~ 2.7 кг
Обмоток:
- Может быть: треугольник или звезда (WYE)
- Дельта-соединение даст вам более высокую мощность на количество меди, более высокую частоту вращения, более высокий ток, более низкое фазное напряжение.
- STAR даст вам более низкие обороты, более высокий крутящий момент (на 1,73 больше, чем dela), более высокое напряжение, более низкий ток.
- Может быть: концентрированного или дробного типа слота.
- Если есть сконцентрированные, то это могут быть: ЛРК, распределенные ЛРК и т. Д.
- Хороший калькулятор схемы намотки можно найти здесь.
Как выбрать магниты?
После того, как вы выберете прорези и полюса, вам нужно выбрать магниты. Это не очень простая задача, потому что вам нужны высокотемпературные магниты, а их не так дешево и легко найти для нужного вам размера. Я купил магниты на заказ на китайском сайте.
- Температурный рейтинг неодима является ориентировочным. Фактическая температура, при которой магнит начинает терять прочность, зависит от размера, формы и магнитной цепи.Если у вас есть магнит, прикрепленный к куску стали, я буду размагничиваться при более высоком магнитном потоке, чем в свободном пространстве. С другой стороны, температура размагничивания будет ниже, если вы подвергнете магнит сильному противоположному магнитному полю, например, в двигателе.
- Если толщина магнита больше, и вам потребуется большее магнитное поле, чтобы начать его размагничивание.
Температурная классификация неодимовых магнитов, N остается от Neo от.
- N42 ≤80 ℃
- N42M ≤100 ℃
- N42H ≤120 ℃
- N42SH ≤150 ℃
- N42UH ≤180 ℃
- N42EH ≤200 ℃
- N42VH ≤230 ℃
Неодимовые магниты необходимо покрывать, иначе они ржавеют при контакте с воздухом.
Покрытия могут быть: никель, цинк, фосфат, эпоксидная смола, золото и другие.
Математический анализ плотности магнитного потока.
Следующий шаг — запустить математический анализ в магнитном поле, чтобы увидеть, есть ли у меня области с насыщенным магнитным полем. Мы хотим избежать насыщения ядра. Для этого я использовал метод конечных элементов Magnetics Tool, решатель конечных элементов Windows для 2D и осесимметричных проблем с магнитным, электростатическим, тепловым потоком и током с графическими пре- и постпроцессорами. магнитный поток выше 2 Тесла, поэтому мне нужно увеличить толщину зуба, чтобы он оставался ниже 2 Тесла, из-за насыщения ламинации.
Формула расчета механического угла расстояния между датчиками Холла:
360 * 2/6 * количество пар полюсов
6 исходит от 6-ступенчатой коммутации в контроллере.
Пример. Двигатель с 14 магнитами означает 7 пар полюсов
Таким образом, результирующий угол между двумя датчиками Холла Hα = 360 * 2/6 * 7 = 11,14 градуса.
Для двигателя с 20 магнитами означает 10 пар полюсов.
в результате Hα = 360 * 2/6 * 10 = 12 градусов
Множество факторов могут существенно повлиять на производительность и эффективность двигателя:
Этими коэффициентами могут быть:
1. Максимальная рабочая частота (в зависимости от числа оборотов и количества полюсов). Частота рассчитывается по следующей формуле:
f = об / с (число оборотов двигателя в секунду) x (количество полюсов / 2) . количество полюсов равно номеру. магнитов.
или: f [hz] = Магниты № x об / мин / 120
Пример для 1000 об / мин: частота вращения будет 1000 об / мин / 60 с = 16,66, тогда f = 16,22 x 40 полюсов / 2 приведет к: f = 333,2 Гц
Поскольку потери в ламинировании сердечника возрастают с увеличением (нелинейным) частоты, мы хотим иметь как можно более низкую частоту для максимального числа оборотов двигателя.Например, для класса ламинирования M330-50 потери на 50 Гц и 1 Тесла составляют 1,29 Вт / кг, но 132 Вт / кг при 1000 Гц.
2 . Правильная комбинация между прорезями и полюсами считается.
3. Свойства материалов и толщина пластин статора и ротора.
4. Толщина воздушного зазора.
5. Магниты марки.
6. Плотность тока.
7. Коэффициент заполнения паза.
8. Зубчатый момент. Краткое описание методов, используемых для уменьшения зубцового момента:
- Перекос блока статора или магнитов
- Использование дробных пазов на полюс
- Форма кривой тока модулирующего привода
- Оптимизация дуги полюса магнита или ширины
Моделирование бесщеточного двигателя 45 кВт, ламинирование 0,2 мм и воздушный зазор 0,75 мм
Результаты моделирования бесщеточного двигателя
- Мотор выпускной без колпачков.
- Двигатель с крышками и без шариковых подшипников.
- У меня также есть видео на YouTube для презентации 3D-модели.
Стадия проектирования
Крупным планом вид катушек, магнитов.
Воздушный зазор 0,75 мм
Пользовательские магниты получены и протестированы путем нагревания до 120 градусов Цельсия на предмет падения магнитного поля.
Нестандартная резка, марка N35UH, магниты с фосфатным покрытием
Поскольку в лазерном цеху в Румынии была только марка M330-50, я был вынужден использовать этот материал с более высокими потерями для высоких оборотов (частоты)
Пластины двигателя марки М330-50 и другие элементы.
Сверло для врезания винта в материал.
Процесс бурения
Ротор в сборе
Ротор с эпоксидной смолой и кевларом для защиты магнитов от разлета центробежной силы.
Я использовал 14 параллельных нитей меди 0,5 мм.
Обмотка двигателя
Мотор закончен, готов к испытаниям.
Водяное охлаждение двигателя
Бесщеточный двигатель готов к испытаниям под нагрузкой.
Сименс выпустил аналогичный мотор в 2018 году, а я выложил свой в 2014 году на YouTube
Отчет об испытаниях двигателя Kunray 3000 ВтТестирование двигателя Kunray 3000W, Мы строго завершаем испытание каждого двигателя, когда он покидает завод, чтобы убедиться в отсутствии проблем с качеством. |
ДРОССЕЛЬНАЯ ЗАСЛОНКА 3IN1, РЕВЕРСИОННАЯ И 3-СКОРОСТНАЯРуль Twist Grip Дроссельная заслонка, переключатель низкой — средней — высокой скорости, переключатель вперед и назад, 3 функции в 1 дроссельной заслонке. |
БЕСЩЕТОЧНЫЙ КОНТРОЛЛЕР 24MOS 50A 3000 ВтБесщеточный контроллер мотора 50А, Контроллер может работать с батареей 48-72 В, номинальной мощностью 3000 Вт. но для двигателя рекомендуется использовать двигатель 72 В, он может позволить двигателю выходить на полную мощность. Степень фазы: 120 °, интеллектуальный контроллер может работать с датчиком Холла и без двигателя Холла, бесщеточный контроллер скорости двигателя, электронный тормоз, 3-скоростной (низкая средняя высокая скорость), функции реверса, световой индикатор и функции блокировки питания. |
Широкое применение среднего двигателяЭлектромотор подходит для электрического скутера, электронного велосипеда, мини-мотоцикла, грязевого велосипеда, электрического картинга, велосипеда, квадроцикла, других проектов DIY и многого другого. |
Создайте свой собственный двигатель / привод BLDC
- В связи 19 января 2018 г. 12:00
- Точки 0
Создайте бесщеточный двигатель, электронную схему привода и запрограммируйте микроконтроллер для его перемещения. Это групповое мероприятие, которое необходимо завершить к соревнованиям в пятницу, 19 января.
Комплект деталей
Каждой из трех команд будет предоставлен «комплект для бесщеточного двигателя» в классе в пятницу, 1/12/2018.Нет никаких ограничений на то, что команды используют детали из этих комплектов; нестандартные детали разрешены и приветствуются. В комплект входят все детали, необходимые для выполнения хотя бы минимальных требований проекта.
Требования к назначению
Создайте свой собственный бесщеточный двигатель. Вы будете соревноваться за максимальную скорость свободного хода и максимальный крутящий момент при остановке. Конкретные требования следующие:
- Ваше устройство должно вращаться, используя энергию изменяющегося магнитного поля.Это изменяющееся магнитное поле должно создаваться катушками, которые вы наматываете самостоятельно (стандартный бесщеточный двигатель не является решением).
- Мы собираемся измерить крутящий момент, который вы создаете, поднимая объект, подвешенный на веревке. По этой причине ротор вашего устройства должен иметь оправку известного диаметра, на которую мы можем наматывать эту струну.
- Вы должны использовать входящую в комплект отладочную плату Texas Instruments TM4C123GXL в качестве источника сигналов коммутации для вашего двигателя.Пример исходного файла для переключения двигателя приведен ниже.
Если эти требования соблюдены, вы можете выбрать для своего двигателя любую конструкцию, которую пожелаете.
Билл будет основным контактным лицом по этому проекту. Не стесняйтесь писать по электронной почте [email protected], звонить / отправлять текстовые сообщения (603) 387-3780 или обращаться в службу технической поддержки B227, если у вас есть какие-либо вопросы.
Документы
Комплект бесщеточного двигателя BOM
безщеточный_main.c
1516384800 19.01.2018 12:00 вечера
Рубрика
Невозможно изменить рубрику после того, как вы начали ее использовать.Заголовок
Вы уже оценили студентов по этой рубрике. Любые серьезные изменения могут повлиять на результаты их оценки.
| Критерии | Рейтинги | Оч | |
|---|---|---|---|
|
Этот критерий связан с результатом обучения.
Описание критерия
порог: 5 баллов |
Эта область будет использоваться оценщиком, чтобы оставлять комментарии, относящиеся к этому критерию. |
баллы
/
5 баллов — |
|
|
Общее количество очков: 5 из 5 |
|||
Создайте свой собственный электродвигатель
| Цена: $ 19 |
||
| Вы можете скачать электронную книгу, как только совершите покупку.
|
Это практическое руководство, которое шаг за шагом описывает, как построить мощный электродвигатель способ «Сделай сам». Весь процесс строительства покрыт деталь с фотографиями, документирующими каждый шаг в пути.
Двигатель, изготовленный в соответствии с данными инструкциями. весит около 10 кг. Наружный диаметр 366 мм, а ширина около 120 мм, выходной вал и резьбовые монтажные стержни / болты в комплект не входят.Максимальная потребляемая мощность еще не определена. Двигатель, описанный в этой книге, непрерывно развивает мощность 7 кВт. импульсами до 18 кВт без видимых повреждений.
Двигатель может использоваться для приведения в движение легкого мотоцикла, меньшая лодка, сверхлегкий самолет и много других интересных творений. Двигатель — бесщеточный двухсторонний осевой. магнитный поток постоянный магнит 3-фазный переменный ток с воздушным сердечником воздух охлаждаемый датчик Холла, подключенный по схеме «треугольник». Уникальной особенностью этого двигателя является то, что он может быть построен в версии без датчика с раздельным статором, питаемым от 7 хобби ESC.Эта версия с разъемным статором может: в некоторых приложениях быть экономически привлекательным альтернатива версии с датчиком Холла, которая обычно питается от более дорогого датчика Холла зависимый контроллер.
Содержание
Часть 1: Общая информация об электродвигателях с осевым потоком, сделанных своими руками
Общая информация и внешние границы
Характеристики двигателя с осевым потоком с воздушным сердечником
Два разных способа определения положения ротора
Информация о разделенном статоре
Мощность и КПД
Электромагнитные катушки и инструменты для намотки катушек
Постоянные магниты
Структура статора
Структура ротора
Часть 2: Пошаговые инструкции по сборке
Покомпонентное изображение с названными частями
Изготовление инструмента для намотки катушек
Расчет длины медных проводов
Катушечная обмотка
Создание статора и статора инструмент для ламинирования
Сборка роторов
Сборка и испытание двигателя
Часть 3: Разное
Список материалов и требований к инструментам
Где купить материалы в Интернете
Вдохновляющие фотографии
Технические чертежи
Заглянуть внутрь книги
Вдохновляющие фото и видео
Конструкция двигателя, задокументированная в книге, привела к созданию двигателя, который используется в преобразовании электрического мотоцикла.
В первой части видео вы можете увидеть положение постоянных магнитов в сравнении с катушками электромагнита. Вторая половина фильма раскрывает некоторые проблемы, с которыми вы столкнетесь, если решите выполнить динамический тест с пропеллером и в то же время захотите задокументировать тест с помощью видеокамеры.
Экспериментальная бессенсорная версия электродвигателя.В этом ролике он питается от 7x HobbyCity super simple 100A 24V ESC.
На этом видео показана значительно более мощная версия мотора для кик-байков, около 500 Вт.
Если вас интересует сборка этого мотора, вы можете купить неотредактированную пошаговую инструкцию по сборке.
Простой однофазный бесщеточный двигатель.
Смотрите другие видеоролики об электродвигателях, сделанных своими руками, на нашем канале YouTube.
Дальнейшие разработки / испытания
Тест максимальной мощности с 11 элементами Thundersky 90Ah.
Настройке ESC 7x120A требуется помощь для определения направления вращения, поэтому добавляются пусковой двигатель и звездочка свободного хода.Пусковой двигатель управляется левой ручкой дроссельной заслонки и регулирует скорость до 5-6 км / ч. Правую ручку дроссельной заслонки, которая управляет ESC 7x120A, можно использовать на скоростях выше 3-4 км / ч.
Экспериментальный двигатель высокой эффективности и большой мощности. 840 параллельных прядей 0,05 мм по 3,9 м каждая. Намотать катушки было немного сложно, фотографии в видео подсказывают, как это сделать. Сопротивление фазы 3,5 мОм.Контроллер Келли на левой ручке дроссельной заслонки (датчик Холла) и 6x 180 A пик Hobbywing ПДУ ESC на правой рукоятке дроссельной заслонки (потенциометр Magura 5 кОм). Контроллер Келли действует как стартер.
Новый статор с воздушным сердечником, улучшенное охлаждение.
Ссылки по теме
Конструкция двигателя, задокументированная в книге, привела к созданию двигателя, который используется в преобразовании электрического мотоцикла.Для получения дополнительной информации: http://www.evalbum.com/3318.
Часто задаваемые вопросы
Вопрос:
Обожаю вашу работу! Это очень вдохновляет. У меня есть один вопрос по теории мотора. Так как вы не используете матрицу Хальбаха, выиграет ли ваш двигатель от стальной задней пластины для магнитов, замыкающих магнитную цепь? Или, может быть, вы используете стальную заднюю пластину? Как вы думаете, насколько сильное поле между щелями вы можете получить со стальными задними пластинами? Заранее спасибо!
Ответ:
Стальная задняя пластина снижает обороты / об / мин для данной версии двигателя примерно на 20%, что позволяет создать еще более эффективный двигатель; это все в книге!
Вопрос:
Меня очень интересуют ваши планы по созданию двигателя с осевым потоком, но я бы хотел построить двигатель, который мог бы выдерживать 20 кВт.Делает ли это ваш продвинутый дизайн, проиллюстрированный в ваших новых разработках?
Ответ:
Я не испытывал систематически двигатель в лаборатории, а скорее в реальных условиях, а именно в качестве тягового двигателя в преобразовании электрического мотоцикла. В этом случае двигатель выдерживает импульсную мощность 20 кВт примерно при 1500 об / мин. Я не ожидал, что двигатель будет выдерживать 20 кВт на низких оборотах в течение более длительного периода времени. Однако работа двигателя на более высоких оборотах позволит передавать больше мощности через двигатель без его перегрева.Это может быть достигнуто разными способами, либо за счет установки более высокого напряжения, либо путем намотки катушек в сторону более высоких оборотов в минуту / об. Также, конечно, есть возможность увеличить мотор.
Вопрос:
Хорошо, это потрясающе. У меня есть мельница, но нет токарного станка. Требуется токарный станок?
Ответ:
Нет, в этой сборке токарный станок не нужен.
Есть две детали сборки, которые можно изготовить на токарном станке, но это не обязательно для достижения хорошего конечного результата.
Вопрос:
Я заинтересован в создании собственного электродвигателя для своего электромобиля. Однако у меня есть определенные параметры двигателя (крутящий момент и частота вращения), которых мне нужно достичь. Как правило, для этого применения требуется низкоскоростной двигатель с высоким крутящим моментом. Предоставляет ли ваша книга необходимую информацию для определения обмоток катушки на основе заданных характеристик двигателя (Kt и Kv)? Хорошая работа между прочим ……
Ответ:
В этой книге вы найдете приблизительный способ расчета правильной длины медного провода / катушки, для которой требуется определенное число оборотов в минуту / Вольт.В целом книга представляет собой практическую инструкцию по сборке и не охватывает основную математику. Однако в процессе создания электродвигателей я приобрел большой практический опыт, который я постарался изложить в письменном виде.
Говоря об опыте, двигатель с осевым потоком воздуха с воздушным сердечником без надлежащей передачи не был бы моим первым выбором для двигателя с низким оборотом и высоким крутящим моментом.
Бесщеточный двигатель | RC Wiki
Бесщеточный двигатель постоянного тока ( BLDC ) — это электродвигатель постоянного тока, в котором вместо механической системы коммутации используется система коммутации с электронным управлением.(В остальной части этой статьи предполагается, что читатель знаком с принципами работы электродвигателей, но если вам нужна дополнительная информация, вы можете прочитать о бесщеточных и щеточных двигателях.)
В обычном (щеточном) двигателе постоянного тока щетки механически контактируют с набором электрических контактов на роторе (так называемый коммутатор ), образуя электрическую цепь между источником постоянного тока и обмотками катушки якоря. При вращении якоря вокруг оси неподвижные щетки контактируют с различными секциями вращающегося коллектора.Коммутатор и щеточная система образуют набор электрических переключателей, каждый из которых срабатывает последовательно, так что электроэнергия всегда течет через катушку якоря, ближайшую к неподвижному статору (постоянный магнит).
В двигателе BLDC узел щеточной системы / коммутатора заменен интеллектуальным электронным контроллером. Контроллер выполняет то же распределение мощности, что и в щеточном двигателе постоянного тока, только без использования системы коммутатора / щеток. Контроллер содержит группу MOSFET-транзисторов для управления сильноточной мощностью постоянного тока и микроконтроллер для точного управления быстро меняющимися временами тока.Поскольку контроллер должен следовать за ротором, контроллеру необходимы некоторые средства определения ориентации / положения ротора (относительно катушек статора). В некоторых конструкциях используются датчики эффекта Холла для непосредственного измерения положения ротора. Другие измеряют обратную ЭДС в неприводных катушках, чтобы определить положение ротора, устраняя необходимость в отдельных датчиках эффекта Холла. (Двигатель BLDC имеет трапециевидный задний фонарь, а бесщеточный двигатель переменного тока имеет синусоидальный задний фон.)
Двигатели BLDC могут быть сконструированы в двух различных физических конфигурациях: В «традиционной» конфигурации постоянные магниты установлены на вращающемся якоре (ротор.) Катушки статора окружают ротор. В конфигурации «бегунок» радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются на выступающем роторе, который окружает сердечник. Во всех двигателях BLDC обмотки статора неподвижны.
Сравнение с щеточными двигателями постоянного тока []
ДвигателиBLDC обладают рядом преимуществ перед щеточными двигателями постоянного тока, включая более высокую надежность, более длительный срок службы (отсутствие эрозии щеток), устранение ионизирующих искр от коллектора и общее снижение электромагнитных помех ( EMI .) Основным недостатком BLDC является более высокая стоимость, которая возникает из-за двух проблем: во-первых, для двигателей BLDC требуются мощные полевые МОП-транзисторы при изготовлении электронного регулятора скорости. Щеточные двигатели постоянного тока могут регулироваться сравнительно тривиальным переменным резистором (потенциометром или реостатом), что неэффективно, но также подходит для приложений, чувствительных к стоимости. Двигатели BLDC нуждаются в более дорогой интегральной схеме, называемой электронным регулятором скорости, чтобы предлагать такой же тип переменного управления. Во-вторых, при сравнении технологий производства BLDC и щеточных двигателей, многие конструкции BLDC требуют ручного труда для ручной намотки катушек статора.С другой стороны, в щеточных двигателях используются катушки якоря, которые можно недорого намотать машинным способом.
Двигатели с BLDC считаются более эффективными, чем щеточные двигатели постоянного тока. Это означает, что при той же входной мощности двигатель BLDC будет преобразовывать больше электроэнергии в механическую мощность, чем щеточный двигатель. Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках двигатели BLDC и высококачественные щеточные двигатели сопоставимы по эффективности.
Приложения []
ДвигателиBLDC потенциально могут быть использованы в любых полевых условиях, которые в настоящее время выполняются щеточными двигателями постоянного тока. Стоимость не позволяет двигателям BLDC заменять щеточные двигатели в наиболее распространенных областях использования. Тем не менее, двигатели BLDC стали доминировать во многих приложениях: в потребительских устройствах, таких как жесткие диски компьютеров, CD / DVD-плееры и охлаждающие вентиляторы ПК, почти исключительно используются двигатели BLDC. Бесщеточные двигатели постоянного тока с низкой скоростью и малой мощностью используются в поворотных столах с прямым приводом. Двигатели BLDC большой мощности используются в электромобилях и некотором промышленном оборудовании.Эти двигатели представляют собой синхронные двигатели переменного тока с роторами с постоянными магнитами.
Сцена для любителей []
В последнее время рост популярности моделей самолетов с электрическим приводом стимулировал спрос на высокопроизводительные двигатели BLDC. Многие любители начали восстанавливать двигатели BLDC из использованных приводов CD / DVD-ROM, ремонтируя их для использования в радиоуправляемых самолетах. Это привело к увеличению прямой доступности для потребителей моторных комплектов DIY (сделай сам) для использования в радиоуправляемых транспортных средствах.Двигатели BLDC, продаваемые в виде комплектов деталей, позволяют покупателю сэкономить деньги за счет дополнительных сборочных работ.
В бесщеточных двигателях для хобби используется потенциально вводящая в заблуждение система номинальной мощности, которая представляет собой число, за которым следует суффикс «кв». Суффикс не означает «киловольты», как можно было бы подумать, но вместо этого относится к оборотам двигателя на вольт. Таким образом, рейтинг 4200 кВ просто относится к двигателю, который вращает 4200 об / мин на вольт.
Следующие производители продают комплекты электродвигателей для самостоятельного использования в моделях автомобилей: (Этот список не полный.)
http://www.aveox.com На этом сайте есть информация о бесщеточных двигателях, в том числе двигателях осевого исполнения: http://web.archive.org/web/20060125012427/http://www.members.cox.net/~rdoctors
Сравнение бесщеточных двигателей []
Ниже представлена таблица с наблюдениями, внесенными пользователями. Предлагаем вам поделиться своими наблюдениями.
| Производитель. | МодельВт. (грамм) | кв. | Опора D » | Опора
P » |
Лопасти пропеллера | В | А | Тяга (г) | |
|---|---|---|---|---|---|---|---|---|---|
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 10 | 4.5 | 2 | 11,1 | 1000 | |
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 9 | 4,5 | 2 | 11,1 | 850 | |
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 8 | 4,5 | 2 | 11,1 | 800 | |
| Андоэр | A2212 / 6T | ~ 55 г | 2200 | 5 | 4.5 | 3 | 11,1 | 800 |
Производитель = Производитель
Вес. = Вес (в граммах)
Kv = об / мин на приложенный вольт
Prop D «= диаметр стойки (в дюймах)
Prop P «= Шаг стойки (в дюймах)
Лопасти пропеллера = Количество лопастей на винте (стандартный «плоский» гребной винт имеет две лопасти; однолопастные гребные винты встречаются очень редко)
В = напряжение, приложенное во время теста (измеренное с помощью вольтметра или рассчитанное на основе количества ячеек при полностью открытой дроссельной заслонке)
A = ток, потребляемый во время теста (измеренный с помощью амперметра)
Тяга = Измеренная тяга (в граммах)
Схема драйвера трехфазного бесщеточного двигателя (BLDC)
В этом посте мы узнаем, как сделать простую схему драйвера трехфазного бесщеточного двигателя постоянного тока.В схеме используется популярный трехфазный драйвер IRS2330 IC
. Представленная идея выглядит простой, поскольку большинство технических вопросов эффективно решается самой IC, все дело в соединении соответствующих выводов с несколькими внешними дополнительными компонентами для требуемых реализаций. .
Как работают BLDC с датчиками Холла
Мы знаем, что все двигатели BLDC в основном включают датчики Холла, прикрепленные к их блоку статора, где эти устройства играют решающее правило в обнаружении и снабжении схемы управления необходимыми данными о мгновенных положениях магнита ротора с помощью относительно активации обмотки статора.
Информация помогает схеме управления последовательно переключать активации электромагнита статора, так что ротор постоянно испытывает крутящий момент и производит заданное вращательное движение.
Таким образом, кажется, что датчики на эффекте Холла являются единственными ответственными за обнаружение и создание предполагаемого вращательного движения в двигателях BLDC.
Цепи управления, подключенные к датчикам Холла, фактически «слепые» и полностью реагируют на сигналы датчиков Холла, чтобы обеспечить необходимую обратную связь с катушками электромагнита.
Вышеупомянутый факт фактически упрощает проектирование 3-фазного контроллера двигателя BLDC, простота также становится еще более удобной благодаря легкой доступности универсальной 3-фазной ИС драйвера H-моста, такой как IRS2330.
Изучение спецификаций IC IRS2330
Следующее обсуждение дает исчерпывающий взгляд на проектирование схемы трехфазного бесщеточного двигателя BLDC:
Подробная информация о выводе IC
Выше показана схема выводов IC IRS2330, которая просто необходимо подключить к набору из нескольких внешних компонентов для реализации предлагаемой схемы контроллера BLDC.
Как сконфигурировать полный мост IC
На приведенной выше схеме мы являемся свидетелями метода соединения выводов IC с некоторыми внешними компонентами, при этом на правой стороне IGBT-каскада показана стандартная конфигурация H-моста с использованием 6 IGBT, интегрированных с соответствующими выводами IC.
Вышеупомянутая интеграция завершает выходной силовой каскад для схемы контроллера BLDC, «нагрузка» указывает на 3-фазные катушки электромагнита BLDC, теперь все дело в настройке входов HIN1 / 2/3 и LIN1 / 2/3 IC с соответствующие выходы датчика Холла.
Вентили НЕ для упорядочивания входов HIN и LIN
Перед применением триггеров датчика Холла ко входам ИС драйвера необходимо выполнить буферизацию через пару вентилей НЕ, как показано на диаграмме выше.
Наконец, выходы логических элементов НЕ интегрированы соответствующим образом с входами IC IRS2330.
Отрицательные стороны всех датчиков Холла можно считать заземленными.
Вторая схема, которая формирует конфигурацию основного драйвера для предлагаемой схемы управления трехфазным бесщеточным двигателем BLDC, также может иметь каскад измерения тока через ее нижнюю левую часть.Резистивный делитель может иметь соответствующие размеры для включения защиты от перегрузки по току и управления подключенным двигателем BLDC.
Чтобы получить исчерпывающие сведения о текущей конфигурации датчиков и других тонкостях всей конструкции, можно обратиться к следующей таблице данных IC:
https://www.irf.com/product-info/datasheets/data/ irs2330pbf.pdf
Как подключить бесщеточные двигатели постоянного тока и управлять ими
Растущая популярность бесщеточного двигателя постоянного тока (BLDC) обусловлена использованием электронной коммутации.Это заменяет традиционную механику, состоящую из щеток, трущихся о коммутатор для подачи питания на обмотки якоря двигателя постоянного тока.
Электронная коммутация обеспечивает больший КПД по сравнению с обычными двигателями постоянного тока с улучшением на 20–30% для двигателей, работающих с той же скоростью и нагрузкой. Поскольку Международное энергетическое агентство сообщает, что 40% всей электроэнергии в мире используется для питания электродвигателей, такое повышение эффективности становится очевидным.
Кроме того, двигатель BLDC более долговечен.Он сохраняет свою высокую производительность, в то время как эффективность и мощность эквивалентного обычного двигателя снижаются из-за износа, вызывая плохой контакт щеток, искрение между щетками и коммутатором, рассеивающее энергию, и грязь, снижающую электрическую проводимость.
Повышенный КПД позволяет делать двигатели BLDC меньше, легче и тише при заданной выходной мощности, что еще больше увеличивает их популярность в таких секторах, как автомобилестроение; бытовая техника; и отопление, вентиляция и кондиционирование (HVAC).Другие преимущества двигателей BLDC включают превосходные характеристики скорости по сравнению с крутящим моментом (за исключением крутящего момента при запуске), более динамичный отклик, бесшумную работу и более высокие диапазоны скоростей.
Обратной стороной двигателей BLDC является их сложность и связанное с этим увеличение стоимости. Электронная коммутация требует контролирующих схем для обеспечения точного времени включения катушки для точного управления скоростью и крутящим моментом, а также для обеспечения работы двигателя с максимальной эффективностью.
К счастью, этот сектор быстро развивается, и поставщики микросхем теперь предлагают широкий спектр высокоинтегрированных микросхем BLDC для двигателей MOSFET с внешними или встроенными микроконтроллерами, чтобы упростить процесс проектирования, а также снизить стоимость компонентов.В этой статье объясняется, как разработчик может воспользоваться преимуществами этих новейших микросхем, чтобы упростить процесс проектирования
.Основы двигателя BLDC
Все электродвигатели с механической или электронной коммутацией используют один и тот же основной метод преобразования электрической энергии в механическую. Ток через обмотку создает магнитное поле, которое в присутствии второго магнитного поля (обычно создаваемого постоянными магнитами) создает силу в этой обмотке, которая достигает максимума, когда ее проводники находятся под углом 90 ° ко второму полю.Увеличение количества катушек увеличивает мощность двигателя и сглаживает подачу мощности. (Компания Monolithic Power Systems (MPS) выпустила заметку по применению (см. Ссылку 1), в которой хорошо резюмируются основные концепции двигателя.)
Двигатель BLDC преодолевает потребность в механическом коммутаторе, изменяя настройку двигателя в обратном направлении; обмотки становятся статором, а постоянные магниты — частью ротора. Статор обычно состоит из стальных пластин с прорезями в осевом направлении для размещения четного числа обмоток по его внутренней периферии.Ротор состоит из вала и ступицы с постоянными магнитами, образующими от двух до восьми пар полюсов, чередующихся между «N» и «S». На рис. 1 показан один пример обычного магнитного устройства, в данном случае две пары магнитов, прикрепленных непосредственно к ступице ротора.
Рис. 1. В двигателе BLDC постоянные магниты прикреплены к ротору. Типичные конфигурации включают от двух до восьми пар, чередующихся между «N» и «S» полюсами. (предоставлено MPS)
Поскольку обмотки неподвижны, для их подачи можно установить постоянные соединения.Чтобы неподвижные обмотки перемещали постоянный магнит, обмотки должны быть запитаны (или коммутированы) в управляемой последовательности для создания вращающегося магнитного поля.
Поскольку вращающееся магнитное поле, создаваемое статором, заставляет ротор вращаться с той же частотой, двигатель BLDC известен как «синхронный» тип. Двигатели BLDC могут быть одно-, двух- или трехфазными. Трехфазные двигатели BLDC являются наиболее распространенными и будут предметом остальной части этой статьи.
Блок управления двигателем BLDC
Безусловно, наиболее распространенной конфигурацией для последовательного приложения тока к трехфазному двигателю BLDC является использование трех пар силовых полевых МОП-транзисторов, расположенных в виде моста, как показано на рисунке 2. Каждая пара управляет переключением одной фазы двигателя. В типичной компоновке полевые МОП-транзисторы верхнего плеча управляются с помощью широтно-импульсной модуляции (ШИМ), которая преобразует входное напряжение постоянного тока в модулированное управляющее напряжение. Использование ШИМ позволяет ограничить пусковой ток и обеспечивает точное управление скоростью и крутящим моментом.Частота ШИМ — это компромисс между коммутационными потерями, возникающими на высоких частотах, и токами пульсаций, которые возникают на низких частотах и которые в крайних случаях могут повредить двигатель. Обычно конструкторы используют частоту ШИМ как минимум на порядок выше максимальной скорости вращения двигателя.
Рис. 2. Трехфазный двигатель BLDC обычно питается от трех пар полевых МОП-транзисторов, расположенных в виде моста и управляемых ШИМ. ШИМ обеспечивает точное управление скоростью и крутящим моментом двигателя.(Схема нарисована с использованием Digi-Key Scheme-it®)
Существует три схемы управления электронной коммутацией: трапецеидальная, синусоидальная и управление по полю. Техника трапеции (описанная в примере ниже) — самая простая. На каждом этапе две обмотки находятся под напряжением (одна «высокая» и одна «низкая»), в то время как другая обмотка плавает. Обратной стороной трапециевидного метода является то, что эта «ступенчатая» коммутация вызывает «пульсации» крутящего момента, особенно на низких скоростях.
Синусоидальное управление более сложное, но оно снижает пульсации крутящего момента.Во время этого режима управления все три катушки остаются под напряжением, и ток возбуждения в каждой из них изменяется синусоидально под углом 120 ° друг от друга. Результат — более плавная подача мощности по сравнению с трапециевидной техникой.
Управление, ориентированное на поле, основано на измерении и регулировке токов статора таким образом, чтобы угол между магнитным потоком ротора и статора всегда составлял 90 °. Этот метод более эффективен на высоких скоростях, чем синусоидальный метод, и дает лучшие характеристики при динамических изменениях нагрузки по сравнению со всеми другими методами.Пульсации крутящего момента практически отсутствуют, а более плавное и точное управление двигателем может быть достигнуто как на низких, так и на высоких скоростях.
В этой статье мы ограничим остальную часть технического обсуждения трапециевидной техникой.
В двигателе, использующем трапециевидную схему управления, переключение моста MOSFET должно происходить в точно определенной последовательности, чтобы двигатель BLDC работал эффективно. Последовательность переключения определяется взаимным расположением пар магнитов ротора и обмоток статора.Трехфазный двигатель BLDC требует шестиэтапной последовательности коммутации для завершения одного электрического цикла. Количество механических оборотов за электрический цикл определяется количеством пар магнитов на роторе. Например, два электрических цикла потребуются для механического вращения ротора, состоящего из двух пар магнитов, за один оборот.
Сенсорное или бессенсорное
Две технологии предлагают решение для позиционной обратной связи. В первом и наиболее распространенном варианте используются три датчика Холла, встроенные в статор и расположенные с равными интервалами, обычно 60 ° или 120 °.Вторая, «бессенсорная» технология управления применяется для двигателей с BLDC, которые требуют минимального количества электрических соединений.
В двигателе BLDC, оборудованном датчиками, каждый датчик на эффекте Холла объединен с переключателем, который генерирует логический «высокий» (для одного магнитного полюса) или «низкий» (для противоположного полюса) сигнал. Последовательность коммутации определяется путем объединения логических сигналов от датчиков Холла и соответствующих переключателей. В любой момент по крайней мере один из датчиков срабатывает одним из магнитных полюсов ротора и генерирует импульс напряжения.
На рисунке 3 показана последовательность коммутации трехфазного двигателя BLDC, вращаемого против часовой стрелки. Датчики на эффекте Холла устанавливаются в положениях «a», «b» и «c». Для каждого шага в последовательности коммутации одна обмотка («U», «V» или «W») приводится в высокое состояние мостом MOSFET, в то время как одна переводится в низкий уровень, а третья остается плавающей. Например, в верхнем левом углу рисунка U высокий (образуя полюс N), V низкий (S) и W плавающий. Возникающее магнитное поле перемещает ротор против часовой стрелки, поскольку его постоянные магниты отталкиваются одной обмоткой и притягиваются другой.Вторая ступень (ниже) показывает, что обмотка U остается на высоком уровне, в то время как V переключается на плавающий, а W переключается на низкий уровень, таким образом поддерживая «вращение» магнитного поля и перемещая ротор вместе с ним. Остальные этапы коммутации, один электрический цикл, составляют половину механического оборота ротора.
Рисунок 3: Электронная последовательность коммутации для трехфазного двигателя BLDC с использованием моста MOSFET и датчиков Холла. В этом случае ротор вращается против часовой стрелки, а датчики Холла («a», «b» и «c») устанавливаются с интервалами 60 °.(Предоставлено: MPS)
На рис. 4 показано состояние фазных обмоток по отношению к сигналам датчика Холла для двигателя, вращающегося против часовой стрелки, показанного на рис. 3 выше.
Рис. 4. Временная диаграмма выхода логического переключателя датчика Холла и состояния обмотки для трехфазного двигателя BLDC, управляемого против часовой стрелки. Обратите внимание, как минимум один логический переключатель и обмотка меняют состояние каждые 60 °. (Предоставлено: MPS)
Бессенсорный двигатель BLDC использует электродвижущую силу (ЭДС), которая вызывает ток в обмотках любого двигателя постоянного тока с магнитным полем, которое противодействует первоначальному изменению магнитного потока, как описано в Законе Ленца.ЭДС имеет тенденцию сопротивляться вращению двигателя и поэтому называется «обратной» ЭДС. Для данного двигателя с фиксированным магнитным потоком и количеством обмоток ЭДС пропорциональна угловой скорости ротора.
Контролируя обратную ЭДС, соответствующим образом запрограммированный микроконтроллер может определять относительные положения статора и ротора без необходимости использования датчиков Холла. Это упрощает конструкцию двигателя, снижает его стоимость, а также устраняет дополнительную проводку и соединения с двигателем, которые в противном случае потребовались бы для поддержки датчиков, тем самым повышая надежность.
Однако, поскольку стационарный двигатель не генерирует противо-ЭДС, контроллер не может определить положение двигателя при запуске. Решение состоит в том, чтобы запустить двигатель в конфигурации разомкнутого контура до тех пор, пока ЭДС не будет генерироваться контроллером, достаточным для определения положения ротора и статора, а затем взять на себя контроль. Более сложный режим управления используется, если двигатель используется в приложении, где обратное вращение запрещено.
Обратная ЭДС, генерируемая каждой обмоткой описанного выше двигателя BLDC, показана в нижней половине рисунка 5.Это сравнивается с выходом логического переключателя датчика Холла для сопоставимого двигателя BLDC, оснащенного датчиками. Из рисунка видно, что точки пересечения нуля для ЭДС, генерируемой в обмотке, совпадают с изменениями состояния переключения для логических переключателей. Именно эту информацию о переходе через ноль микроконтроллер использует для запуска каждого этапа цикла коммутации в бессенсорном двигателе BLDC. (См. Библиотечную статью «Управление бездатчиковыми двигателями BLDC через обратную ЭДС».)
Рис. 5. Выходной сигнал логического переключателя датчика Холла в сравнении с обратной ЭДС намотки для двигателя BLDC, вращаемого против часовой стрелки.Обратите внимание, как точки пересечения нуля для информации об обратной ЭДС, используемой для управления бездатчиковым двигателем BLDC, совпадают с изменением состояния логических переключателей в двигателе BLDC, оборудованном датчиками. (Предоставлено: MPS)
Разработка двигателя BLDC
Несмотря на то, что принципы коммутации двигателей BLDC задействованы, мощность двигателя BLDC и схема управления не обязательны. На рынке имеется множество проверенных интегрированных продуктов, которые можно использовать в качестве строительных блоков для схем.В основе схемы лежат силовые модули BLDC, содержащие либо драйверы затвора, либо интегрированные полевые МОП-транзисторы.
Трехфазный драйвер MOSFET A4915 компанииAllegro Microsystems работает как предварительный драйвер для моста MOSFET с шестью мощностями для двигателя BLDC. Это устройство предназначено для продуктов с батарейным питанием. Одной из примечательных функций для экономии энергии является спящий режим с низким энергопотреблением, который гарантирует, что устройство потребляет минимальный ток, когда двигатель не вращается. Устройство также оснащено синхронным выпрямлением — методом, заимствованным у импульсных регуляторов напряжения для снижения энергопотребления и устранения необходимости во внешних диодах Шоттки.
Microchip также предлагает предварительный драйвер для моста MOSFET на шесть мощностей для двигателя BLDC, но на этот раз для небольших бессенсорных блоков, используемых в автомобилях, бытовой технике и товарах для хобби. Устройство MCP8025 включает понижающий импульсный стабилизатор для питания внешнего контроллера, а также два линейных регулятора с малым падением напряжения (LDO) и насос заряда для питания моста MOSFET.
Эта микросхема упрощает работу, измеряя обратную ЭДС плавающей обмотки, которая затем сравнивается с нейтральной точкой двигателя.Когда обратная ЭДС пересекает нулевую точку, детектор пересечения нуля отправляет сигнал на главный контроллер, чтобы указать контрольную точку коммутации.
DRV8313 компанииTexas Instruments делает еще один шаг вперед, интегрируя три индивидуально управляемых полумостовых драйвера. Преимущество такой схемы состоит в том, что микросхему можно использовать не только для управления трехфазным двигателем BLDC, но и для управления двигателем с механической коммутацией (с использованием двух полумостовых мостов) или трех независимых соленоидов.Микросхема может подавать до 3,5 А от источника питания от 8 до 60 В.
DRV8313 не имеет входов датчиков. TI предлагает, чтобы для работы как с сенсором, так и без сенсора, чип должен быть объединен с микроконтроллером, таким как популярный MSP430. Такая компоновка, как показано на рисунке 6, обеспечивает полную систему управления с обратной связью для сенсорного трехфазного двигателя BLDC.
Рис. 6: Полная система управления с обратной связью для трехфазного электродвигателя BLDC с датчиком.Схема включает аналоговый вход скорости, микроконтроллер MSP430, контролирующий выходы ШИМ для силовых полевых МОП-транзисторов, драйвер моста из шести полевых МОП-транзисторов, мост полевых МОП-транзисторов и двигатель BLDC. Положение статора и ротора двигателя определяется тремя датчиками Холла, которые подают сигналы на микроконтроллер. (Предоставлено: Texas Instruments)
TI предлагает альтернативную часть, DRV8308, которая не интегрирует полевые МОП-транзисторы. Однако он может напрямую принимать входные сигналы от трех датчиков Холла и, следовательно, при желании может использоваться без дополнительного микроконтроллера.
В то время как датчики на эффекте Холла являются проверенным решением для позиционной обратной связи, разработки в технологии датчиков положения обеспечивают большую точность и обещают более эффективную последовательность коммутации. Например, ADA4571 компании Analog Devices представляет собой датчик угла и формирователь сигнала, который может заменить три датчика Холла в типичном трехфазном двигателе постоянного тока с BLDC одним устройством. Преимущества — экономия места и необходимость работать только с одним сигналом.
ADA4571 использует анизотропную магниторезистивную технологию (AMR).Типичная реализация заключается в установке диаметрально намагниченного диска на конце вала двигателя BLDC (см. Рисунок 7). Магнитное поле диска проходит через плоскость датчика, и угол ротора определяется без контакта между механическими и электрическими компонентами.
Рис. 7. Один анизотропный магниторезистивный датчик может быть размещен рядом с дисковым магнитом, установленным на конце вала двигателя BLDC, заменяя три датчика Холла для определения угла двигателя BLDC, экономя место и упрощая обработку сигналов.
ADA4571 выдает усиленные косинусоидальные и синусоидальные выходные сигналы, относящиеся к углу вращающегося магнитного поля. Диапазон выходного напряжения пропорционален напряжению питания. Analog Devices предлагает объединить датчик с 12-разрядным АЦП AD7866 для преобразования аналоговых сигналов ADA4571 в цифровой сигнал, необходимый для контроллера привода двигателя BLDC или внешнего микроконтроллера.
Analog Devices утверждает, что использование одного углового датчика не ставит под угрозу точность коммутации, поскольку ADA4571 может ограничивать воспринимаемую угловую погрешность максимумом +/- 0.25 ° для двигателя BLDC со скоростью до 25000 об / мин.
Заключение
Электронная коммутация двигателей BLDC требует точного управления, что увеличивает сложность и стоимость схемы двигателя.
