Как собрать радиоуправляемый передатчик в домашних условиях. Какие компоненты потребуются для сборки. Как запрограммировать и настроить самодельный пульт управления. Какие возможности дает самостоятельно собранный RC-передатчик.
Преимущества самодельного RC-передатчика
Создание собственного радиоуправляемого передатчика имеет ряд преимуществ по сравнению с покупкой готового устройства:
- Возможность полностью настроить функционал под свои задачи
- Значительная экономия средств по сравнению с покупкой профессионального оборудования
- Понимание принципов работы RC-систем изнутри
- Развитие навыков электроники и программирования
- Возможность в дальнейшем модифицировать и улучшать устройство
При этом самодельный передатчик может не уступать по возможностям многим готовым решениям. Давайте рассмотрим процесс создания такого устройства пошагово.
Необходимые компоненты для сборки
Для создания радиоуправляемого передатчика потребуются следующие основные компоненты:

- Микроконтроллер (например, Arduino Nano)
- Радиомодуль NRF24L01
- Джойстики и кнопки для управления
- OLED-дисплей
- Аккумулятор и модуль зарядки
- Печатная плата
- Корпус
Выбор конкретных моделей компонентов зависит от желаемого функционала и бюджета. Рассмотрим подробнее основные элементы.
Микроконтроллер
Сердцем устройства является микроконтроллер. Популярный вариант — Arduino Nano на базе ATmega328P. Он обладает достаточной производительностью и удобен в программировании.
Радиомодуль
Модуль NRF24L01 обеспечивает беспроводную связь. Он работает на частоте 2.4 ГГц и имеет радиус действия до 100 м. Существуют версии со встроенной и внешней антенной.
Элементы управления
Для управления используются джойстики, кнопки, потенциометры. Количество и тип определяются конкретной задачей. Например, для управления квадрокоптером понадобится минимум 2 джойстика.
Процесс сборки передатчика
Сборка RC-передатчика включает следующие основные этапы:
- Разработка схемы подключения компонентов
- Изготовление или заказ печатной платы
- Пайка компонентов на плату
- Программирование микроконтроллера
- Сборка устройства в корпус
- Тестирование и отладка
Рассмотрим некоторые важные моменты процесса сборки.
Разработка схемы
На этом этапе продумывается расположение всех компонентов и соединений между ними. Желательно использовать программы для проектирования печатных плат.
Пайка компонентов
Пайка требует аккуратности и соблюдения технологии. Особое внимание нужно уделить правильной ориентации микросхем и полярности элементов. Используйте тонкий паяльник и качественный припой.
Программирование
Прошивка микроконтроллера осуществляется через USB-порт с помощью Arduino IDE. Базовый скетч можно найти в открытых источниках и доработать под свои задачи.
Настройка и калибровка передатчика
После сборки передатчик необходимо настроить и откалибровать:
- Настроить диапазоны перемещения стиков
- Откалибровать нейтральные положения
- Настроить кривые отклика
- Запрограммировать функции кнопок
- Настроить телеметрию (при необходимости)
Процесс настройки зависит от конкретной модели и прошивки. Обычно для этого используется экранное меню передатчика.
Возможности самодельного RC-передатчика
Функционал самостоятельно собранного передатчика может включать:
- Управление до 6-8 каналами
- Настройка конечных точек, экспонент, микширования
- Программируемые переключатели
- Запись и воспроизведение макросов
- Телеметрия (напряжение батареи, координаты GPS и т.д.)
- Голосовые оповещения
- Установка таймеров
При желании функционал можно расширять, дорабатывая аппаратную и программную части устройства.
Преимущества и недостатки самодельного передатчика
Подводя итог, выделим основные плюсы и минусы создания RC-передатчика своими руками:
Преимущества:
- Низкая стоимость
- Возможность кастомизации
- Развитие навыков
- Понимание принципов работы
Недостатки:
- Требуются определенные знания и навыки
- Меньшая надежность по сравнению с профессиональными устройствами
- Отсутствие гарантии и сертификации
Тем не менее, для многих любителей создание собственного передатчика может стать увлекательным и полезным проектом. Главное — подойти к процессу ответственно и уделить внимание вопросам безопасности.
Пульт радиоуправления моделями своими руками / Хабр
Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
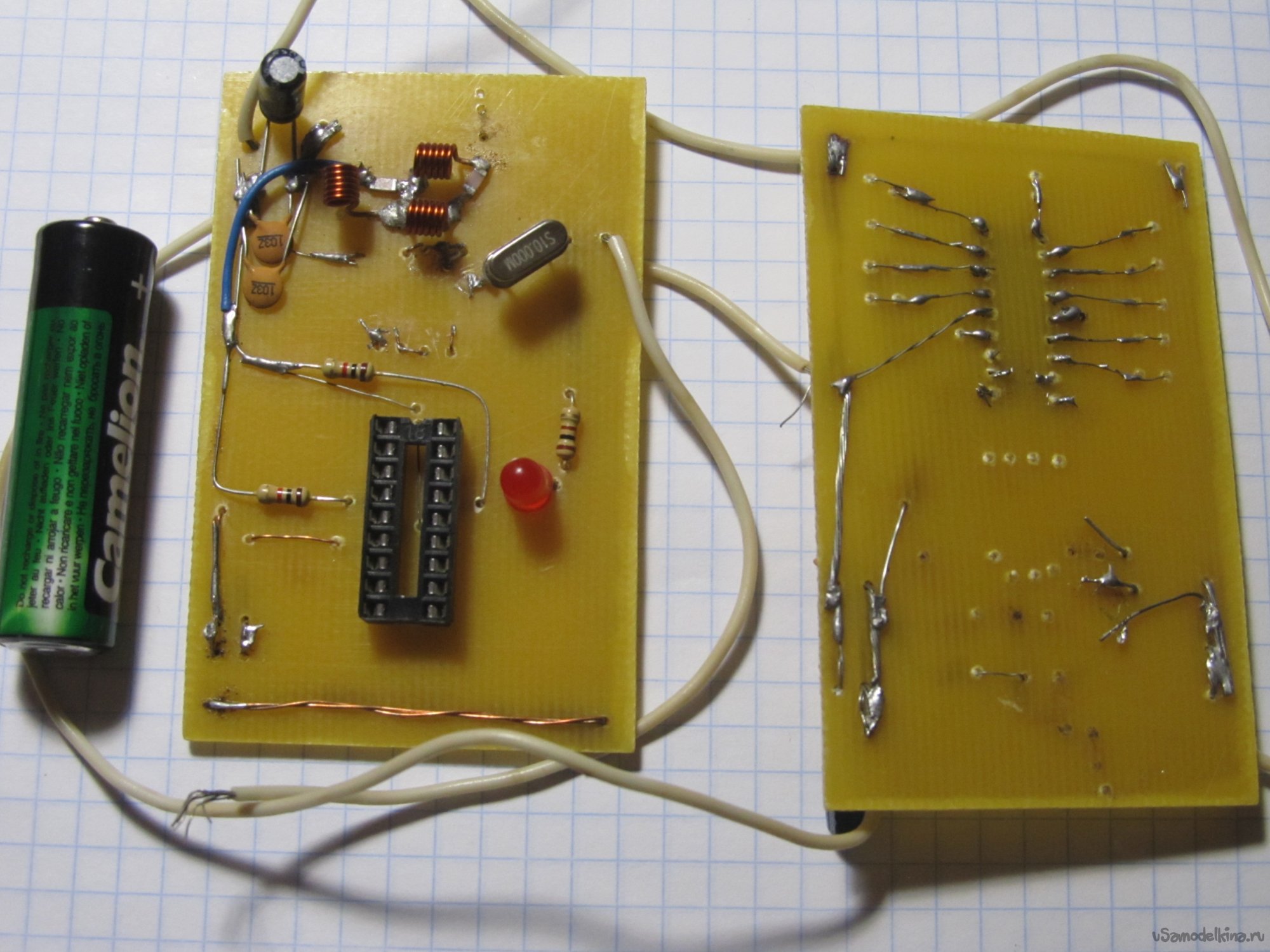
Сборка и комплектующие:
Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
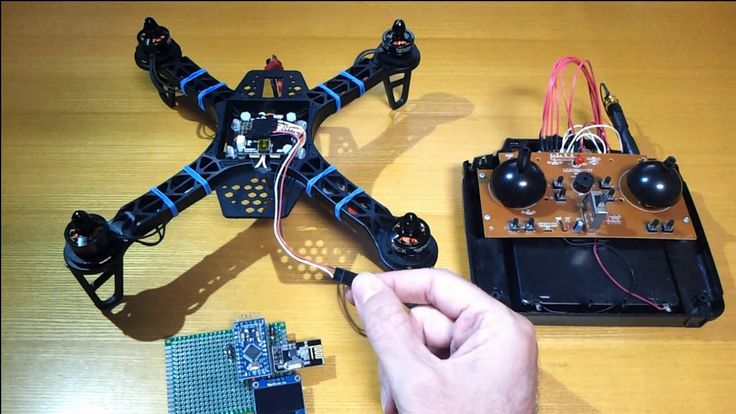
 Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.
Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Печатная плата — atmel-programme.clan.su/pultdzhostik.rar
Радиомодули брал тут — alipromo.com/redirect/cpa/o/rhc8f0n1hlzfodwgihmb8nwr9wx53k5g
Пульт радиоуправления моделями своими руками
Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:
Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.
Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.
Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
Печатная плата — atmel-programme.clan.su/pultdzhostik. rar
rar
Автор: zim48
Источник
Самодельный шестиканальный радиоуправляемый передатчик Arduino
- по: Том Нарди
Не так давно радиоуправляемые передатчики, по крайней мере достойные владения, были дорогим оборудованием. Еще совсем недавно идея радиоуправляемого передатчика с прошивкой с открытым исходным кодом считалась бы несбыточной мечтой. Тем не менее, сегодня покупка дешевых импортных передатчиков и прошивка разработанной сообществом прошивки (если она изначально не была предустановлена) — обычное дело. Не будет большим преувеличением сказать, что в настоящее время мы находимся в «золотом веке» радиоуправляемых передатчиков для хобби.
Но что, если даже дешевого оборудования с настраиваемым программным обеспечением недостаточно? Что, если вы хотите перейти на следующий уровень? В этом случае у [Electronoobs] есть радиоуправляемый передатчик с питанием от Arduino, на котором написано ваше имя. Но это не кусок макетной платы с парой дешёвых джойстиков, хотя он тоже сделал один из них. Цель этой сборки заключалась в том, чтобы она выглядела и работала как можно профессиональнее, оставаясь при этом в пределах возможностей любителя. Конечный продукт, вероятно, не получит никаких наград за дизайн, но он по-прежнему является впечатляющей демонстрацией того, на что сегодня способен отдельный хакер и производитель с невероятными технологиями, к которым у нас есть доступ.
Но это не кусок макетной платы с парой дешёвых джойстиков, хотя он тоже сделал один из них. Цель этой сборки заключалась в том, чтобы она выглядела и работала как можно профессиональнее, оставаясь при этом в пределах возможностей любителя. Конечный продукт, вероятно, не получит никаких наград за дизайн, но он по-прежнему является впечатляющей демонстрацией того, на что сегодня способен отдельный хакер и производитель с невероятными технологиями, к которым у нас есть доступ.
Что входит в эту доморощенную систему радиоуправления? Внутри задней панели [Electronoobs] установили батареи, зарядный модуль и регулятор напряжения, который понижает напряжение батареи до 3,3 В, необходимых для питания остальной электроники передатчика. С другой стороны есть Arduino Nano, модуль NRF24 и OLED-дисплей. Наконец, у нас есть набор переключателей, кнопок, потенциометров и два очень красивых джойстика JH-D202X-R2 для пользовательского ввода.
Как вы могли догадаться, создание собственного передатчика означает создание собственного приемника. К сожалению, вы не сможете привязать свои существующие радиоуправляемые автомобили к этому радио, но, поскольку сторона приемника не сложнее, чем другой модуль Arduino Nano и NRF24, адаптировать их не составит труда, если вы к этому склонны.
К сожалению, вы не сможете привязать свои существующие радиоуправляемые автомобили к этому радио, но, поскольку сторона приемника не сложнее, чем другой модуль Arduino Nano и NRF24, адаптировать их не составит труда, если вы к этому склонны.
Недорогие бытовые радиоуправляемые передатчики могут быть чем-то вроде смешанной сумки. Есть несколько удивительно приличных вариантов, но неудивительно, что хакеры заинтересованы просто в создании своих собственных версий.
Самодельный радиоуправляемый контроллер и многое другое!
» Перейти к дополнительным функциям
Проектом моей мечты было создание собственного радиоуправляемого контроллера своими руками.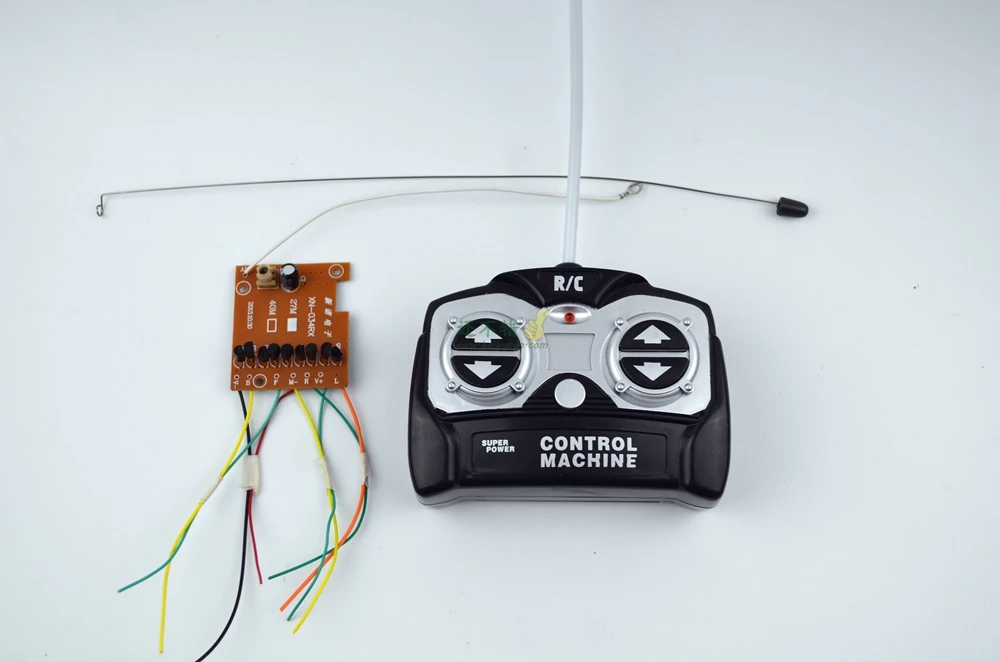 Использование микроконтроллера для анимации и записи последовательностей символов стало предпочтительным методом для большинства приложений. Однако рано или поздно вам захочется иметь прямой контроль над работой персонажа или реквизита. Независимо от того, хотите ли вы взаимодействовать с толпой или позволить вам управлять автомобилем и обеспечить мобильность опоре, вам нужно изучить возможности управления мощностью RC.
Использование микроконтроллера для анимации и записи последовательностей символов стало предпочтительным методом для большинства приложений. Однако рано или поздно вам захочется иметь прямой контроль над работой персонажа или реквизита. Независимо от того, хотите ли вы взаимодействовать с толпой или позволить вам управлять автомобилем и обеспечить мобильность опоре, вам нужно изучить возможности управления мощностью RC.
Управление готовыми механизмами — важный компонент успешной сборки. Как и многие мои проекты, этот находится в стадии разработки. Этот контроллер дает вам свободу действий, позволяя вам совершать совершенно уникальные движения, а также дает вам возможность настраивать характеристики вашего персонажа в соответствии с каждой отдельной ситуацией. Не бывает двух одинаковых спектаклей!
Эта система будет включена в мою следующую книгу по аниматронике своими руками. Он задумывался как проект, который можно было бы добавить к главе о пайке, чтобы улучшить навыки пайки, а также предоставить полезный инструмент для сборщика реквизита после его завершения. В результате сотрудничества с Addicore проект был готов к выпуску намного раньше запланированного срока.
В результате сотрудничества с Addicore проект был готов к выпуску намного раньше запланированного срока.
Хотя контроллер носит мое имя, это творение и все аксессуары были созданы компанией Addicore. Это американская компания по производству запчастей для электроники, с которой приятно работать. Я надеюсь, что вы проверите их и для других ваших электронных нужд. Бессовестная вилка, у них также есть моя первая книга, Полное руководство по созданию аниматроники своими руками (см. Рисунок 1 ).
РИСУНОК 1. Полное руководство по самостоятельной аниматронике , опубликовано Магазин SERVO .
Эта система будет больше, чем радиоуправляемая система передатчика/приемника. Найти простую в использовании и недорогую систему, позволяющую управлять персонажами, может быть непросто, поэтому я хотел разработать технику, которая познакомила бы строителей с таким подходом непосредственного управления персонажами.
Обычно мы используем процесс, разработанный Брайаном Линкольном, который обладает невероятной гибкостью и хорошо подходит для нас. Вы можете найти все детали этой системы в выпуске журнала 9 за декабрь 2016 года.0051 Магазин SERVO . С тех пор он претерпел несколько изменений, но по-прежнему безупречно работает для опытных пользователей.
Я хотел другой выбор. Я начал с поиска в Интернете проектов, разработанных другими. Вскоре я обнаружил, что, хотя в Интернете есть множество фантастических проектов, инструкции часто были неполными; перечисленные части были неверны или не были доступны по предоставленным ссылкам; или код не работал должным образом.
Кроме того, детали часто доступны только у нескольких разных поставщиков, что усложняет процесс и требует оплаты нескольких транспортных расходов. Детали часто меняются и иногда не соответствуют указанным в документации. Контроллеры либо должны быть построены на временной макетной плате, либо вы должны заказать печатные платы (печатные платы) у отдельного поставщика. Это создает сложную операцию, которую я хотел упростить.
Это создает сложную операцию, которую я хотел упростить.
Разочарованный этим процессом, я хотел предложить стратегию, при которой все детали приобретаются у одного и того же поставщика в одном комплекте, где включены печатные платы, проверенный код работает, а при необходимости доступна поддержка клиентов.
Потратив много времени на размышления и исследования, мне пришла в голову идея разработать собственный пульт дистанционного управления «Сделай сам». Его можно использовать для запуска самых разных робототехнических и аниматронных проектов. Я объединился со знающими людьми из Addicore, и я считаю, что мы придумали что-то особенное! Первая версия будет включать в себя два джойстика, два ползунка и множество кнопок. Это позволит пользователю настроить контроллер в соответствии со своими конкретными потребностями.
Цель этого проекта включала несколько требований. Я хотел, возможно, научить некоторым новым навыкам и укрепить уверенность, а также предоставить сборщикам контроллер, который включает возможности, недоступные в настоящее время на других контроллерах. Собрать что-то подобное вместе и заставить его оживить транспортное средство или персонажа очень полезно и, надеюсь, побудит строителей взяться за еще более сложные проекты. Мои требования включали следующее:
Собрать что-то подобное вместе и заставить его оживить транспортное средство или персонажа очень полезно и, надеюсь, побудит строителей взяться за еще более сложные проекты. Мои требования включали следующее:
Цели проекта
- Компонент «сделай сам», включающий некоторые элементы пайки.
- Кукольный контроллер, который можно записывать и запускать отдельно.
- Живой контроллер для нескольких реквизитов, который может сохранять способность действовать как обычный RC-контроллер.
- Устройство, способное управлять небольшими двигателями постоянного тока с добавлением дополнительного экрана контроллера двигателя.
- Полноценная радиоуправляемая система, в которой используется тот же передатчик для простого переключения типов плат приемника.
- Несложный дизайн — никакого 100-страничного руководства.
- Только основные параметры управления. Если требуются более продвинутые функции, вы можете изучить некоторые из других прекрасных модулей.

В начальной конфигурации у вас будет очень функциональное и полезное дополнение к вашей коллекции контроллеров. Однако лучшее еще впереди. Планы на версию 2 включают в себя возможность управлять своим персонажем с помощью контроллера и сохранять программу на плате приемника через SD-карту. Затем эта плата сможет запускаться и запускать вашу программу независимо от передатчика.
Теперь у вас есть легко программируемая автономная доска для кукольного творчества! Эта функция выводит контроллер за пределы тех, которые в настоящее время доступны для этой ограниченной суммы инвестиций. Следите за выпуском и ценами на сайте.
Давайте создадим проект
Этот проект потребует, чтобы вы уже хорошо разбирались в паяльном оборудовании и методах. Собрав этот комплект, вы сможете применить эти навыки на практике.
Полный комплект Версии 1 можно приобрести у Интернет-магазин SERVO/Nuts & Volts (см. Рисунок 2 ). Он включает в себя печатные платы преобразователя и все необходимые компоненты для их заполнения. Он также поставляется с собранным приемником, а также сервоприводом и соединительным кабелем для проверки контроллера после завершения сборки.
Он также поставляется с собранным приемником, а также сервоприводом и соединительным кабелем для проверки контроллера после завершения сборки.
РИСУНОК 2. Передатчик и приемник в сборе.
Программное обеспечение использует легко доступную Arduino IDE (интегрированную среду разработки) со ссылками на полный пакет программного обеспечения. Стоимость полного комплекта на момент печати составляет $56,9.5 (см. Ресурсы ).
Передатчик в сборе
Эта система радиоуправления включает три основных компонента: передатчик; получатель; и модули беспроводного приемопередатчика NRF24L01. В этом комплекте приемник и NRF24L01 со встроенной антенной поставляются полностью собранными с предварительно загруженным необходимым кодом. Сборка передатчика потребует некоторого количества пайки, но должна быть в пределах возможностей любого человека с базовыми навыками, как указано выше (см. Ресурсы ).
Передатчик можно приобрести уже в собранном виде за дополнительные 20 долларов у компании Addicore для тех, кто не имеет навыков пайки или не заинтересован в самостоятельной сборке.
В комплект входят все необходимые детали (см. , рис. 3 ). Также прилагается полный набор инструкций по сборке, поэтому я не буду подробно описывать конструкцию здесь. Это просто краткий обзор.
РИСУНОК 3. В комплект входит все необходимое.
Передатчик в сборе состоит из трех отдельных плат. Они больше похожи на игровой контроллер, чем на традиционный RC-контроллер. Идея заключалась в том, чтобы больше людей чувствовали себя комфортно, используя этот форм-фактор, поскольку большинство людей использовали их раньше.
- На крышке находятся слайдеры, переключатели и два джойстика.
- На внутренней плате установлены все припаянные компоненты.
- Батарейный отсек крепится к нижней панели и использует четыре батареи типа АА. Это означает, что дополнительное зарядное устройство не требуется, что упрощает подачу питания на передатчик.
Три платы скреплены стойками. Такое расположение позволяет сделать плату максимально тонкой, что делает ее более удобной в использовании (см. , рис. 4, ).
, рис. 4, ).
РИСУНОК 4. Использование нескольких досок облегчает удержание.
Микроконтроллер контроллера имеет предварительно загруженный и протестированный базовый код, но этот код также предоставляется для тех, кто хочет настроить его в соответствии со своими потребностями. Это ссылка на код контроллера: https://github.com/addicore/Steve-Koci-s-DIY-RC-Controller и это ссылка на код приемника: https://github.com/addicore/Boffintronics-RC-Receiver . Весь код соответствует Стандартной общественной лицензии GNU версии 3.0, что позволяет каждому пользователю модифицировать и адаптировать код в соответствии со своими потребностями.
В коде есть несколько переменных, которые можно легко настроить:
- Можно установить конечные пределы сервопривода.
- Направление движения сервопривода можно изменить на противоположное.
- Мертвая зона сервопривода может быть отрегулирована.
До четырех опор можно управлять, установив на каждую отдельную плату приемника. В настоящее время они стоят $ 12,50 от Addicore. Затем вы можете переключаться между каждой платой с помощью двух переключателей. Эта функция особенно полезна для тех, чьи посетители перемещаются между несколькими реквизитами. Вы можете иметь полный контроль, чтобы активировать и управлять каждой опорой по мере необходимости.
Код контроллера написан для использования любой из 10 частот. Конечный пользователь может запрограммировать, какую частоту будут использовать платы, находясь в полевых условиях. Нет необходимости выполнять эти настройки при подключении к компьютеру. Вы также можете переключаться между режимом индивидуального приемника или режимом нескольких досок.
Текущая конфигурация комбинации передатчика и приемника RC будет управлять одновременно шестью сервоприводами и шестью цифровыми выходами.
Добавление двух ползунковых переключателей — это то, чего я всегда хотел от контроллера. Возможность точно установить положение вашего сервопривода — это функция, которая чрезвычайно полезна при кукольном управлении вашими персонажами. Визуальная ссылка, которая показывает точное местоположение сервопривода, проверяя положение слайда, очень удобна.
Возможность точно установить положение вашего сервопривода — это функция, которая чрезвычайно полезна при кукольном управлении вашими персонажами. Визуальная ссылка, которая показывает точное местоположение сервопривода, проверяя положение слайда, очень удобна.
Контроллер также имеет множество кнопок, которые можно использовать для других целей. Например, вы можете добавить в радиоуправляемую машину светодиодные фонари, которые можно включать и выключать удаленно.
Для беспроводного модуля NRF24L01 доступны два варианта антенн. Если вам требуется больший радиус действия, вы можете использовать модель с внешней антенной, или, если вы хотите что-то более компактное, используйте версию со встроенной антенной (см. Рисунок 5 ). Второй версии, вероятно, достаточно для наших целей управления пропеллером, но вам может понадобиться модель с внешней антенной, если, например, вы используете ее для управления радиоуправляемой машиной.
РИСУНОК 5. NRF24L01 выпускается в двух версиях.
NRF24L01 выпускается в двух версиях.
Запускаем его в работу
Теперь, когда у нас есть этот новый контроллер, его нужно использовать. У меня есть множество проектов, нуждающихся в чем-то подобном, но я решил воплотить в жизнь персонажа, который терпеливо ждал своей очереди.
Я всегда хотел анимированного дракона. Я подобрал именно этого дракона во время поиска в Интернете (см. , рис. 6 9).0054). Хорошо, я просто бродил по Интернету, но именно тогда я часто натыкаюсь на некоторые из самых крутых вещей.
РИСУНОК 6. Эта кукла-дракон является отличной отправной точкой для аниматроников.
У него подвижный хвост, а голова отделена от тела (см. Ресурсы ). Кажется, в настоящее время его нет в наличии, так как я не смог снова найти его в наличии ни у одного из продавцов, которых я исследовал, когда покупал свой. Хорошее напоминание покупать вещи, когда вы их видите, так как они могут исчезнуть в следующий раз, когда вы будете искать!
Я использовал четыре сервопривода Hitec от ServoCity, чтобы обеспечить движение дракона (см. Ресурсы ): один для перемещения руки; второй сервопривод для управления хвостом; третья позволяет поворачивать голову из стороны в сторону; и последний сервопривод сочленяет рот (см. , рис. 7, и , рис. 8, ). Поскольку я использую только четыре сервопривода, я могу управлять ими всеми с помощью двух джойстиков. Это делает кукольное дело легким!
Ресурсы ): один для перемещения руки; второй сервопривод для управления хвостом; третья позволяет поворачивать голову из стороны в сторону; и последний сервопривод сочленяет рот (см. , рис. 7, и , рис. 8, ). Поскольку я использую только четыре сервопривода, я могу управлять ими всеми с помощью двух джойстиков. Это делает кукольное дело легким!
РИСУНОК 7. Внутренняя компоновка сервопривода кузова.
РИСУНОК 8. Крепление на голову с сервоприводом челюстей.
Подождите! Вы говорите, что у вас сейчас нет сервопроектов на верстаке, для которых требуется RC-контроллер? Не беспокойся! Контроллер можно использовать для запуска одного из простых в сборке сумо-ботов Addicore (см. , рис. 9, ). Этот комплект поставляется с собственной платой приемника, которая работает с помощью приложения на вашем телефоне (см. Ресурсы ). Мне намного проще управлять с помощью RC-контроллера.
Мне намного проще управлять с помощью RC-контроллера.
РИСУНОК 9. Простой в сборке сумо-бот.
Это быстрая и простая сборка, которая позволит вам протестировать новый контроллер и повеселиться. Бот сумо — это простое в сборке транспортное средство, для сборки которого достаточно клеевого пистолета. Это также отличный проект, которым можно поделиться с детьми, который поможет повысить их энтузиазм в работе с роботами. В настоящее время он стоит 37,50 долларов. Следите за выпуском кода на веб-сайте Addicore.
Лучшее еще впереди
Это только начало. В разработке находится несколько новых моделей, в том числе:
- . В разработке находится щит, который будет включать собственную плату драйвера двигателя, позволяющую управлять небольшими двигателями постоянного тока. Этот экран будет прикреплен непосредственно к плате приемника с добавлением двух рядов заголовков. Вам также потребуется установить пару дополнительных клеммных колодок (см.
 Рисунок 10 ). Эта плата и код также должны быть доступны на веб-сайте вскоре после того, как они будут опубликованы.
Рисунок 10 ). Эта плата и код также должны быть доступны на веб-сайте вскоре после того, как они будут опубликованы. - Корпус, напечатанный на 3D-принтере. Мы хотели бы разработать для него корпус, напечатанный на 3D-принтере, если только кто-то не опередит нас в этом. Если вы разрабатываете его, поделитесь им с сообществом, чтобы другие могли извлечь пользу.
- Плата передатчика с вкладками для записи на крышке. Это позволяет пользователю добавлять собственные описания переключателей с помощью маркера Sharpie™; возможность настроить контроллер под каждое конкретное приложение. Все, что помогает мне запомнить макет, полезно! Их можно стереть небольшим количеством спирта, поэтому вы можете изменить расположение передатчика. А пока вы можете использовать серебряный маркер на верхней доске, и он по-прежнему будет съемным.
- Автономная и активируемая система кукловодства. Он может использовать несколько плат приемника с программированием, хранящимся в энергонезависимой памяти.
 Версия, которая скоро будет выпущена, позволит вам записывать последовательность до шести сервоприводов, которые можно записывать и воспроизводить при срабатывании. Для этого потребуется плата приемника, отличная от той, что используется в модели версии 1. Эта новая плата будет включать встроенную память в виде карты microSD. Мы также планируем новое программное обеспечение, которое позволит записывать и воспроизводить несколько последовательностей. Это позволит внести некоторое разнообразие в воспроизведение, а также предоставит возможность статической дорожки между активациями основного программирования.
Версия, которая скоро будет выпущена, позволит вам записывать последовательность до шести сервоприводов, которые можно записывать и воспроизводить при срабатывании. Для этого потребуется плата приемника, отличная от той, что используется в модели версии 1. Эта новая плата будет включать встроенную память в виде карты microSD. Мы также планируем новое программное обеспечение, которое позволит записывать и воспроизводить несколько последовательностей. Это позволит внести некоторое разнообразие в воспроизведение, а также предоставит возможность статической дорожки между активациями основного программирования.
РИСУНОК 10. Щит драйвера двигателя идеально подходит для небольших двигателей постоянного тока.
Цель этого контроллера заключалась в том, чтобы придумать что-то простое в использовании и более подходящее для тех, кто интересуется своим первым проектом кукловодства. Я также хотел, чтобы он сохранил все основные функции стандартного RC-контроллера.
