Что такое частотный преобразователь. Как устроен частотный преобразователь. Какие бывают виды частотных преобразователей. Как работает частотный преобразователь. Для чего применяются частотные преобразователи.
Что такое частотный преобразователь и для чего он нужен
Частотный преобразователь — это электронное устройство, предназначенное для преобразования переменного тока одной частоты в переменный ток другой частоты. Основное назначение частотных преобразователей — управление скоростью вращения и моментом электродвигателей переменного тока.
Частотные преобразователи позволяют:
- Плавно регулировать скорость вращения электродвигателя в широком диапазоне
- Обеспечивать энергосбережение за счет оптимизации режимов работы двигателя
- Осуществлять плавный пуск и торможение двигателя
- Защищать двигатель от перегрузок
- Управлять несколькими двигателями от одного преобразователя
Благодаря этим возможностям частотные преобразователи находят широкое применение в промышленности, на транспорте, в системах вентиляции и кондиционирования и других областях.

Структура и принцип работы частотного преобразователя
Типовая структура частотного преобразователя включает следующие основные блоки:
- Выпрямитель — преобразует входное переменное напряжение в постоянное
- Звено постоянного тока — сглаживает пульсации выпрямленного напряжения
- Инвертор — преобразует постоянное напряжение в переменное требуемой частоты
- Система управления — формирует сигналы управления инвертором
Принцип работы частотного преобразователя заключается в следующем:
- Входное переменное напряжение выпрямляется
- Выпрямленное напряжение сглаживается в звене постоянного тока
- Инвертор преобразует постоянное напряжение в переменное с регулируемой частотой и амплитудой
- Система управления формирует сигналы для ключей инвертора по заданному закону
Таким образом, на выходе преобразователя формируется переменное напряжение с требуемыми параметрами для управления двигателем.
Виды частотных преобразователей
Существует несколько основных типов частотных преобразователей:
1. С непосредственной связью
В таких преобразователях входное напряжение напрямую преобразуется в выходное без промежуточного выпрямления. Они обладают высоким КПД, но имеют ограниченный диапазон регулирования частоты.

2. С промежуточным звеном постоянного тока
Это наиболее распространенный тип. Входное напряжение сначала выпрямляется, а затем инвертируется. Позволяют получить широкий диапазон регулирования частоты.
3. Матричные преобразователи
Не имеют звена постоянного тока. Преобразование осуществляется с помощью матрицы двунаправленных ключей. Обладают высоким КПД и компактностью.
Двухуровневые и многоуровневые инверторы напряжения
Двухуровневые инверторы
Формируют на выходе два уровня напряжения. Являются наиболее простыми и распространенными. Подходят для низковольтных применений.
Многоуровневые инверторы
Формируют три и более уровней выходного напряжения. Позволяют работать с более высокими напряжениями. Основные типы:
- С фиксированной нейтральной точкой
- С плавающими конденсаторами
- Каскадные H-мостовые
Многоуровневые инверторы обеспечивают лучшее качество выходного напряжения, но имеют более сложную конструкцию.

Методы управления частотными преобразователями
Основные методы управления частотными преобразователями включают:
1. Скалярное управление
Простой метод, основанный на изменении частоты и амплитуды напряжения. Подходит для насосов, вентиляторов и других механизмов с постоянной нагрузкой.
2. Векторное управление
Более сложный метод, обеспечивающий точное регулирование момента и скорости. Применяется для прецизионных приводов.3. Прямое управление моментом
Обеспечивает быстрое и точное регулирование момента двигателя. Используется в высокодинамичных приводах.
Выбор метода управления зависит от требований к динамике привода и точности регулирования.
Применение частотных преобразователей
Основные области применения частотных преобразователей включают:
- Промышленные приводы (станки, конвейеры, подъемные механизмы)
- Насосы и вентиляторы
- Компрессоры
- Транспортные системы (лифты, эскалаторы)
- Системы кондиционирования и вентиляции
- Электротранспорт
Применение частотных преобразователей позволяет значительно повысить энергоэффективность и управляемость электроприводов в различных отраслях.

Преимущества использования частотных преобразователей
Основные преимущества применения частотных преобразователей:
- Плавное регулирование скорости в широком диапазоне
- Энергосбережение за счет оптимизации режимов работы двигателя
- Снижение пусковых токов и механических нагрузок
- Улучшение качества технологических процессов
- Увеличение срока службы оборудования
- Возможность удаленного управления и мониторинга
Эти преимущества обеспечивают высокую экономическую эффективность внедрения частотно-регулируемых приводов во многих отраслях.
Частотные преобразователи — структура, принцип работы
Частотные преобразователи – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Частотные преобразователи, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
- С явно выраженным промежуточным звеном постоянного тока.
- С непосредственной связью (без промежуточного звена постоянного тока).
- практически самый высокий КПД относительно других преобразователей (98,5% и выше),
- способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах,
- относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Каждый из существующих классов имеет свои достоинства инедостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
 Таким образом, выходное напряжение преобразователя формируетсяиз «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжениядля одной из фаз нагрузки. На входе выигрывают у тиристорныхдействует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Таким образом, выходное напряжение преобразователя формируетсяиз «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжениядля одной из фаз нагрузки. На входе выигрывают у тиристорныхдействует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
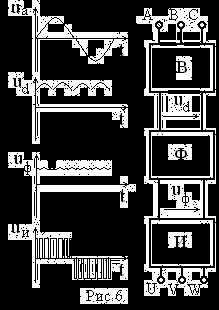 Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
Наиболее широкое применение в современных частотно регулируемых приводах находят частотники с явно выраженным звеном постоянного тока (рис. 6.)
В частотных преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 — 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость,простая неэнергоемкая система управления, самая высокая рабочая частота.
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорнойсистемой управления в частотных преобразователях снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя,уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Частотные преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют болеевысокую цену на единицу выходной мощности, вследствие относительной сложности производстватранзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а такжетребует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность примененияIGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Структура и принцип работы низковольтного преобразователя частоты на IGBT транзисторах
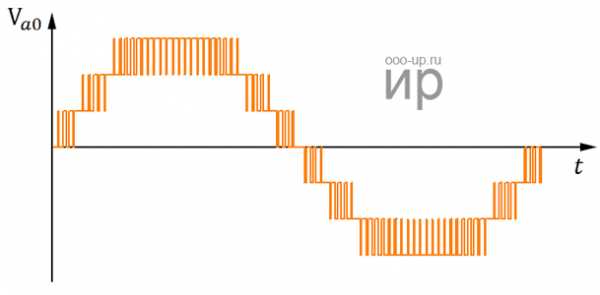
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента инвертора.
Переменное напряжение питающей сети (uвх.)с постоянной амплитудой и частотой (U вх = const, f вх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение u d поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
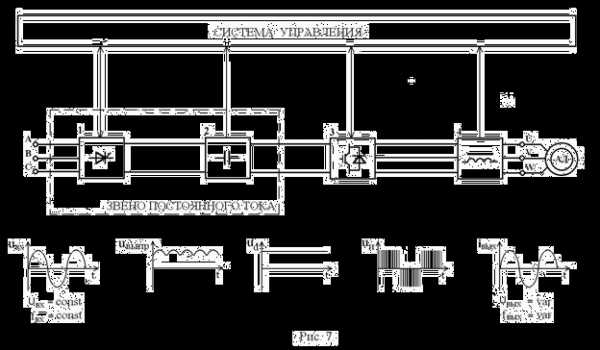
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение u и изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечиваетсяв середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя.Амплитуда и частота напряженияопределяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (вых = var, f вых = var).
Сделать заказ на частотный преобразователь
www.softstarter.ru
Частотный преобразователь
Дмитрий Левкин
Частотный преобразователь, или преобразователь частоты — электротехническое устройство (система управления), используемое для контроля скорости и/или момента двигателей переменного тока путем изменения частоты и напряжения питания электродвигателя.Согласно ГОСТ 23414-84 полупроводниковый преобразователь частоты — полупроводниковый преобразователь переменного тока, осуществляющий преобразование переменного тока одной частоты в переменный ток другой частоты
Частотный преобразователь — это устройство, используемое для того чтобы обеспечить непрерывное управление процессом. Обычно частотный преобразователь способен управлять скоростью и моментом асинхронных и/или синхронных двигателей.
Частотный преобразователь небольшой мощности

Высоковольтный преобразователь
Преобразователи частоты находят все более широкое применение в различных приложениях промышленности и транспорта. Благодаря развитию силовых полупроводниковых элементов, инверторы напряжения и инверторы тока с ШИМ управлением получают все более широкое распространение. Устройства, которые преобразуют постоянный сигнал в переменный, с желаемым напряжением и частотой, называются инверторами. Такое преобразование может быть осуществлено с помощью электронных ключей (BJT, MOSFET, IGBT, MCT, SIT, GTO) и тиристоров в зависимости от задачи.
На данный момент основная часть всей производимой электрической энергии в мире используется для работы электрических двигателей. Преобразование электрической мощности в механическую мощность осуществляется с помощью электродвигателей мощностью от меньше ватта до нескольких десятков мегаватт.
- Современные электроприводы должны отвечать различным требованиям таким как:
- максимальный КПД;
- широкий диапазон плавной установки скорости вращения, момента, ускорения, угла и линейного положения;
- быстрое удаление ошибок при изменении управляющих сигналов и/или помех;
- максимальное использование мощности двигателя во время сниженного напряжения или тока;
- надежность, интуитивное управление.
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
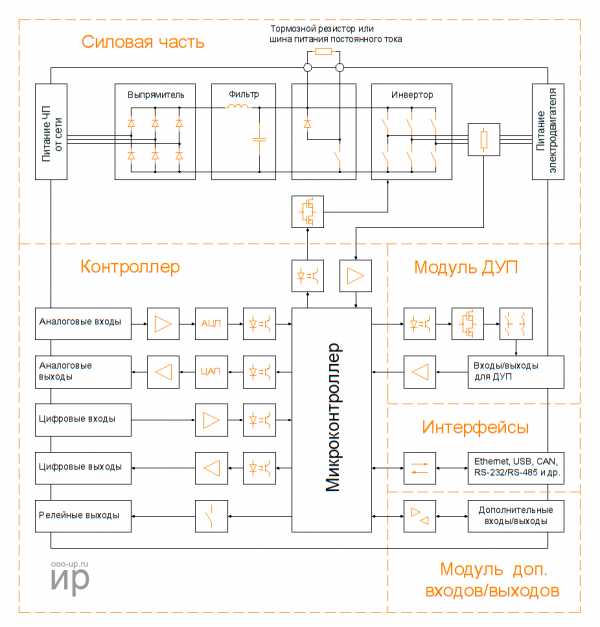

Функциональная схема частотного преобразователя
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях [3]Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
- Методы модуляции можно разделить на четыре основные группы:
- ШИМ — широтно-импульсная модуляция
- ПВМ — пространственно-векторная модуляция
- гармоническая модуляция
- методы переключения переменной частоты
Корни силовой электроники уходят к 1901 году, когда П.К. Хьюитт изобрел ртутный вентиль. Однако современная эра полупроводниковой силовой электроники началась с коммерческого представления управляемого кремниевого выпрямителя (тиристора) компанией General Electric в 1958 году. Затем развитие продолжалось в области новых полупроводниковых структур, материалов и в производстве, давая рынку много новых устройств с более высокой мощностью и улучшенными характеристиками. Сегодня силовая электроника строится на металл-оксид-полупроводниковых полевых транзисторах (MOSFET — metal-oxide-semiconductor field-effect transistor) и биполярных транзисторах с изолированным затвором (IGBT — Insulated-gate bipolar transistors), а для диапазона очень высоких мощностей — на тиристорах с интегрированным управлением (IGCT – Integrated gate-commutated thyristor). Также сейчас доступны интегрированные силовые модули. Новая эра высоковольтных, высокочастотных и высокотемпературных технологий открывается многообещающими полупроводниковыми устройствами, основанными на широкой запрещенной зоне карбида кремния (SiC). Новые силовые полупроводниковые устройства всегда инициируют развитие новых топологий преобразователей [3].
Инвертор напряжения
Инвертор напряжения наиболее распространен среди силовых преобразователей.
Двухуровневый инвертор напряжения
Двухуровневый инвертор напряжения (two-level voltage-source inverter) – наиболее широко применяемая топология преобразователя энергии. Он состоит из конденсатора и двух силовых полупроводниковых ключей на фазу. Управляющий сигнал для верхнего и нижнего силовых ключей связан и генерирует только два возможных состояния выходного напряжения (нагрузка соединяется с положительной или отрицательной шиной источника постоянного напряжения).
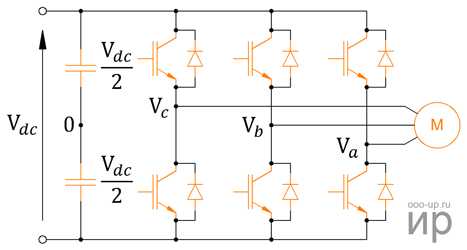
Схема двухуровневого инвертора напряжения
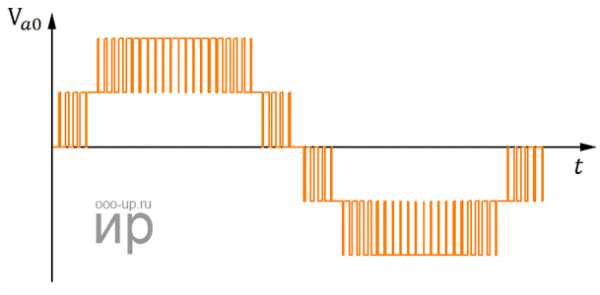
Фазное напряжение двухуровневого инвертора напряжения
Используя методы модуляции для генерирования управляющих импульсов возможно синтезировать выходное напряжение с желаемыми параметрами (формой, частотой, амплитудой). Из-за содержания высоких гармоник в выходном сигнале для генерирования синусоидальных токов выходной сигнал необходимо фильтровать, но так как данные преобразователи обычно имеют индуктивную нагрузку (электродвигатели) дополнительные фильтры используются только при необходимости.
Максимальное выходное напряжение определяется значением постоянного напряжения звена постоянного тока. Для эффективного управления мощной нагрузкой требуется высокое постоянное напряжение звена постоянного тока, но на практике это напряжение ограничено максимальным рабочим напряжением полупроводников. Для примера низковольтные IGBT транзисторы обеспечивают выходное напряжение до 690 В. Для того чтобы обойти данное ограничение по напряжению в последние десятилетия были разработаны схемы многоуровневых преобразователей. Данные преобразователи сложнее, чем двухуровневые в плане топологии, модуляции и управления, но при этом имеют лучшие показатели по мощности, надежности, габаритам, производительности и эффективности.
Трехуровневый преобразователь с фиксированной нейтральной точкой
В трехуровневом преобразователе с фиксированной нейтральной точкой (three-level neutral point clamped converter) постоянное напряжение делится поровну посредством двух конденсаторов, поэтому фаза может быть подключена к линии положительного напряжения (посредством включения двух верхних ключей), к средней точке (посредством включения двух центральных ключей) или к линии отрицательного напряжения (посредством включения двух нижних ключей). Каждому ключу в данном случае требуется блокировать только половину напряжения звена постоянного тока, тем самым позволяя увеличить мощность устройства, используя те же самые полупроводниковые ключи, как и в обычном двухуровневом преобразователе. В данном преобразователе обычно используются высоковольтные IGBT транзисторы и IGCT тиристоры.
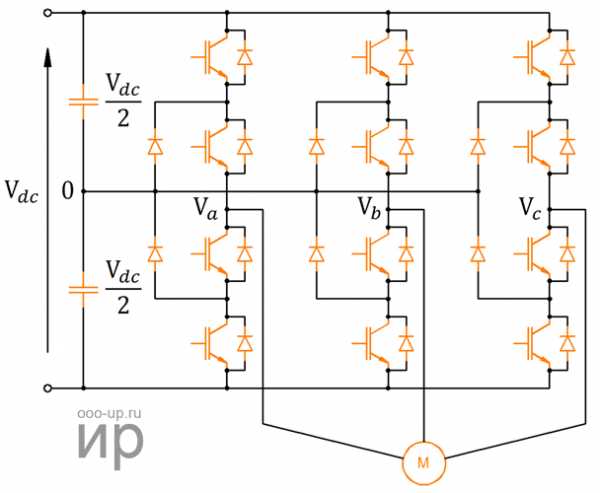
Схема трехуровневого преобразователя с фиксированной нейтральной точкой
- Недостатками данных преобразователей являются:
- Дисбаланс конденсаторов, создающий асимметрию в преобразователе. Данную проблему предлагается решать путем изменения метода модуляции.
- Неравное распределение потерь из-за того, что потери на переключение внешних и центральных ключей отличаются в зависимости от режима работы. Данная проблема не может быть решена с использованием обычной схемы, поэтому была предложена измененная топология – активный преобразователь со связанной нейтральной точкой (active NPC). В этой схеме диоды заменены управляемыми ключами. Таким образом, выбирая соответствующую комбинацию ключей, возможно уменьшить и равномерно распределить потери.
- ГОСТ Р 50369-92 Электроприводы. Термины и определения.
- Rahul Dixit, Bindeshwar Singh, Nupur Mittal. Adjustable speeds drives: Review on different inverter topologies.- Sultanpur, India.:International Journal of Reviews in Computing, 2012.
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon, «High-Performance Motor Drives», IEEE Industrial Electronicsd, vol. 5, no. 3, pp. 6-26, Sep.2011.
Фазное напряжение трехуровневого преобразователя с фиксированной нейтральной точкой
Преобразователь с фиксированной нейтральной точкой может масштабироваться для достижения больше чем трех уровней выходного сигнала путем деления напряжения звена постоянного тока более чем на два значения посредством конденсаторов. Каждое из этих деленных напряжений может быть подключено к нагрузке с использованием расширенного набора ключей и ограничительных диодов. Вместе с увеличением мощности преимуществами многоуровневого преобразователя является лучшее качество электроэнергии, меньшее значение скорости нарастания напряжения (dv/dt) и связанных электромагнитных помех. Однако, когда преобразователь со связанной нейтральной точкой имеет более трех уровней, появляются другие проблемы. С точки зрения схемотехники в таком случае ограничительные диоды требуют более высокое максимальное рабочее напряжение чем основные ключи, что требует использования различных технологий или нескольких ограничительных диодов соединенных последовательно. В дополнение становится критическим неравномерное использование силовых элементов в схеме. В итоге из-за увеличения количества элементов снижается надежность. Приведенные недостатки ограничивают использование преобразователей с фиксированной нейтральной точкой с более чем тремя уровнями в промышленных приложениях.
Многоуровневые преобразователи
Каскадные преобразователи основанные на модульных силовых ячейках со схемой H-мост (cascaded H-bridge — CHB) и преобразователи с плавающими конденсаторами (flying capacitor converter) были предложены для обеспечения большего количества уровней выходного напряжения в сравнении с преобразователями с фиксированной нейтральной точкой.
Каскадный Н-мостовой преобразователь
Каскадный преобразователь — высоко модульный преобразователь, состоящий из нескольких однофазных инверторов, обычно называемыми силовыми ячейками, соединенными последовательно для формирования фазы. Каждая силовая ячейка выполнена на стандартных низковольтных компонентах, что обеспечивает их легкую и дешевую замену в случае выхода из строя.
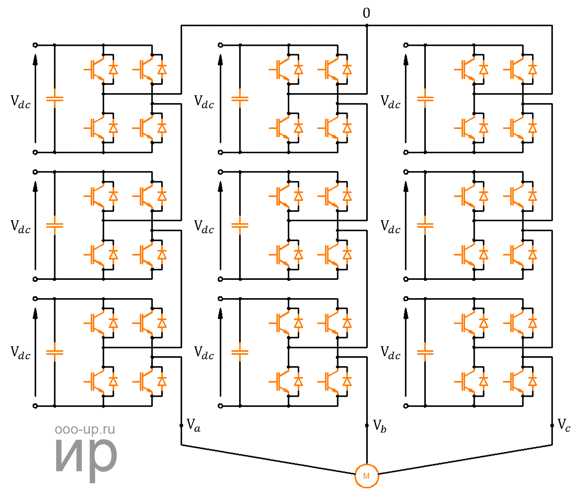
Схема каскадного преобразователя
Основным преимуществом данного преобразователя является использование только низковольтных компонентов, при этом он дает возможность управлять мощной нагрузкой среднего диапазона напряжения. Несмотря на то что частота коммутации в каждой ячейке низкая, эквивалентная частота коммутации приложенная к нагрузке – высокая, что уменьшает потери на переключение ключей, дает низкую скорость нарастания напряжения (dv/dt) и помогает избежать резонансов.
Фазное напряжение каскадного преобразователя
Преобразователь с плавающими конденсаторами
Выходное напряжение преобразователя с плавающими конденсаторами получается путем прямого соединения выхода фазы с положительной, отрицательной шиной или подключением через конденсаторы. Количество уровней выходных напряжений зависит от количества навесных конденсаторов и отношения между различными напряжениями.
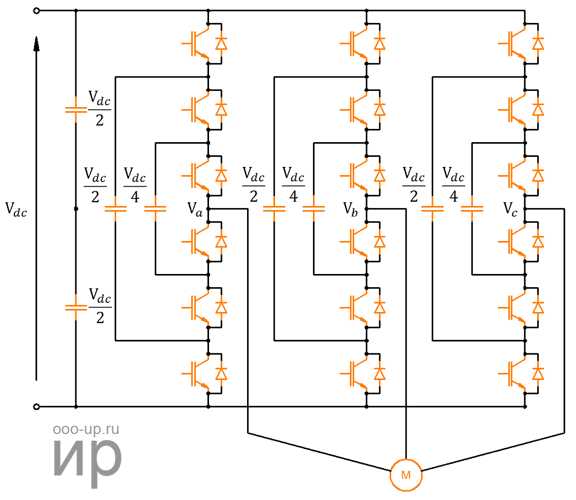
Схема преобразователя с плавающими конденсаторами
Этот преобразователь, как и в случае каскадного преобразователя, также имеет модульную топологию, где каждая ячейка состоит из конденсатора и двух связанных ключей. Однако, в отличие от каскадного преобразователя добавление дополнительных силовых ключей к конденсаторному преобразователю не увеличивает номинальную мощность преобразователя, а только уменьшает скорость нарастания напряжения (dv/dt), улучшая коэффициент гармоник выходного сигнала. Как и у каскадного преобразователя, модульность уменьшает стоимость замены элементов, облегчает поддержку и позволяет реализовать отказоустойчивую работу.
Фазное напряжение преобразователя с плавающими конденсаторами
Конденсаторный преобразователь требует только один источник постоянного тока для питания всех ячеек и фаз. Поэтому, можно обойтись без входного трансформатора, а количество ячеек может быть произвольно увеличено в зависимости от требуемой выходной мощности. Подобно преобразователю с фиксированной нейтральной точкой, этому преобразователю требуется специальный алгоритм управления для регулирования напряжения на конденсаторах.
Инвертор тока
Для работы инвертору тока всегда требуется управляемый выпрямитель, чтобы обеспечить постоянный ток в звене постоянного тока. В стандартной топологии обычно используются тиристорные выпрямители. Чтобы уменьшить помехи в нагрузке, в звене постоянного тока используется расщепленная индуктивность. Инвертор тока имеет схему силовых ключей наподобие инвертора напряжения, но в качестве силовых ключей используются тиристоры с интегрированным управлением (IGCT). Выходной ток имеет форму ШИМ и не может быть напрямую приложен к индуктивной нагрузке (электродвигателю), поэтому инвертор тока обязательно включает выходной емкостной фильтр, который сглаживает ток и выдает гладкое напряжение на нагрузку. Этот преобразователь может быть реализован для работы на средних напряжениях и более того он по природе имеет возможность рекуперации энергии.
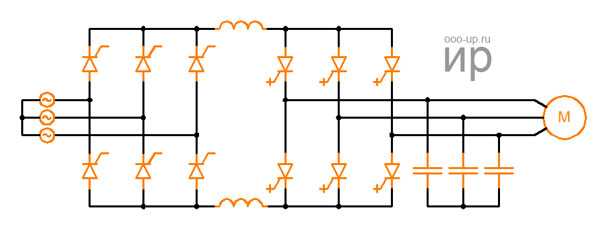
Схема инвертора тока с выпрямителем
Прямые преобразователи
Прямые преобразователи передают энергию прямо от входа к выходу без использования элементов накопления энергии. Основным преимуществом таких преобразователей является меньшие габариты. Недостатком – необходимость более сложной схемы управления.
Циклоконвертер относится к категории прямых преобразователей. Данный преобразователь широко использовался в приложениях требующих высокую мощность. Этот конвертер состоит из двойных тиристорных преобразователей на фазу, который может генерировать изменяемое постоянное напряжение, контролируемое таким образом, чтобы следовать опорному синусоидальному сигналу. Вход каждого преобразователя питается от фозосмещающего трансформатора, где устраняются гармоники входного тока низкого порядка. Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. По своей природе данный преобразователь хорошо подходит для управления низкочастотными мощными нагрузками.
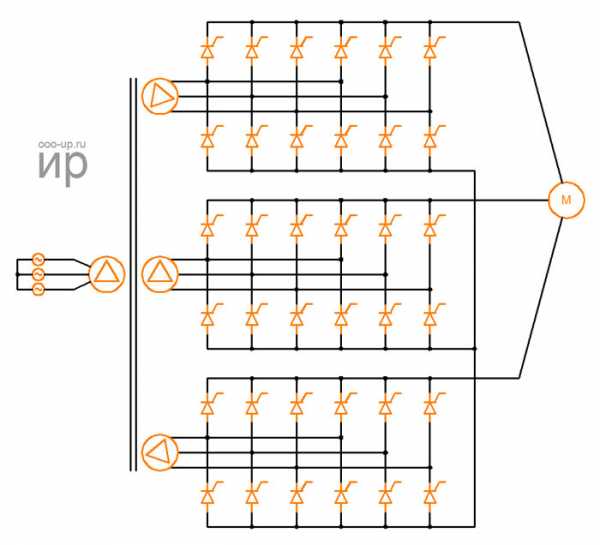
Схема циклоконвертера
Матричный преобразователь в его прямой и непрямой версии также принадлежит к категории прямых преобразователей. Основной принцип работы прямого матричного преобразователя (direct matrix converter) — возможность соединения выходной фазы к любому из входных напряжений. Преобразователь состоит из девяти двунаправленных ключей, которые могут соединить любую входную фазу с любой выходной фазой, позволяя току течь в обоих направлениях. Для улучшения входного тока требуется индуктивно-емкостной фильтр второго порядка. Выход напрямую соединяется с индуктивной нагрузкой. Не все доступные комбинации ключей возможны, они ограничены только 27 правильными состояниями коммутации. Как говорилось ранее, основное преимущество матричных преобразователей — меньшие габариты, что важно для автомобильных и авиационных приложений.
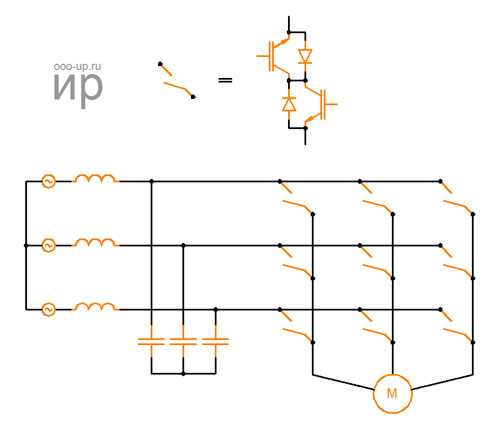
Схема прямого матричного преобразователя
Непрямой матричный преобразователь (indirect matrix converter) состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора. Количество силовых полупроводников такое же как у прямых матричных преобразователей (если двунаправленный ключ рассматривается как два однонаправленных ключа), но количество возможных состояний включения отличается. Используя ту же самую конфигурацию непрямого матричного преобразователя, возможно упростить его топологию и уменьшить количество элементов ограничив его работу от положительного напряжения в виртуальном звене постоянного тока. Уменьшенная топология называется разреженный матричный преобразователь (sparse matrix converter).
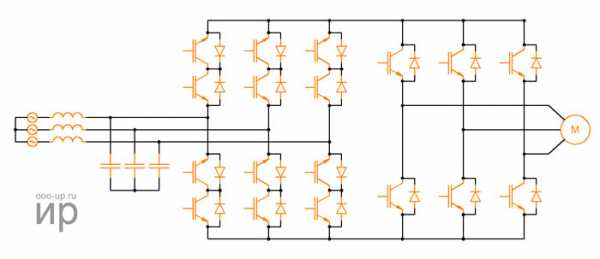
Схема непрямого матричного преобразователя
Схема разреженного матричного преобразователя
Библиографический список
engineering-solutions.ru
Рис.1. Структурная схема преобразователя частоты
Транскрипт
1 Синус-фильтр И. Морозов, ООО «ОПТИМА», Республика Беларусь Ключевые слова: EF3LC, синус-фильтр, синусоидальный фильтр, выходной фильтр, output filters, sine wave output filter for motor drives, опции преобразователей частоты, Elhand, Элхэнд, Optima, Оптима, защита двигателя от перенапряжения, длина моторного кабеля, частота ШИМ, преобразователь частоты, инвертор. Введение Переход изготовителей преобразователей частоты (ПЧ) к IGBT транзисторам (биполярный транзистор с изолированным затвором), используемых в инверторах напряжения связан с тем, что IGBT транзисторы имеют меньшее время переключения, чем предшественники. В связи с этим, с одной стороны снижается потеря мощности при переключениях ключей, с другой — появляется возможность увеличения несущей частоты синусоидальной широтно-импульсной модуляции (ШИМ) до 20 кгц, а это в свою очередь снижает уровень высших гармоник в выходном токе, а следовательно снижаются потери в электродвигателе и улучшаются его электромеханические характеристики. Однако улучшение важнейших параметров ПЧ приводит к возникновению некоторых эффектов, которые необходимо учитывать при выборе электродвигателей, моторных кабелей и дополнительного оборудования защищающего их. ПЧ на базе IGBT транзисторов имеют более быстрое время нарастания выходного напряжения (50-400нс), по сравнению с силовыми ключами, используемыми ранее, например, у BJT время нарастания нс; у GTO нс. Чем меньше время нарастания тем, при определенных условиях, больше разрушающее воздействие на изоляцию двигателя и силового моторного кабеля оказывают импульсы напряжения следующие с высокой частотой. Время нарастания напряжения на зажимах электродвигателя теперь имеет большее влияние на переходный процесс, заставляя учитывать явление отраженной волны и его отрицательное влияние на изоляцию двигателя и моторного кабеля. Изучая проблему, и предлагая пути ее решения, мы руководствовались требованиями NEMA (National Electrical Manufacturers Association) в части предельных параметров напряжения на зажимах электродвигателя: NEMA MG1 part 30: Низковольтные общепромышленные двигатели: Максимальное импульсное напряжение 1000В; минимальное время нарастания напряжения 2мкс. [1] NEMA MG1 part 31: Низковольтные двигатели предназначенные для работы с преобразователями частоты: Максимальное импульсное напряжение 1600В; минимальное время нарастания напряжения 0,1 мкс [2] Явление отраженной волны Инвертор напряжения ПЧ с использованием технологии синусоидальной ШИМ (PWM) не формирует синусоидальное напряжение на выходе, а генерируют непрерывную последовательность импульсов ШИМ следующих с высокой частотой рис. 1., верхняя осциллограмма красного цвета рис. 2. Рис.1. Структурная схема преобразователя частоты 1
2 Рис. 2. Выходное напряжение инвертора и напряжение на зажимах мотора. Длина кабеля 211м, частота ШИМ 2 кгц, преобразователь частоты 0,75 квт, асинхронный двигатель 0,75 квт, 2820 об/мин Рис. 3. Выходной ток инвертора. Длина кабеля 211м, частота ШИМ 2 кгц, преобразователь частоты 0,75 квт, асинхронный двигатель 0,75 квт, 2820 об/мин Ток, благодаря синусоидальной ШИМ, при этом, близок к синусоидальному рис. 3. Импульсы напряжения с выхода ПЧ передаются к зажимам двигателя по моторному кабелю. Пиковое напряжение импульса на выходе инвертора равно величине напряжения в контуре постоянного напряжения преобразователя частоты (Ubus). Амплитуда импульса напряжения на зажимах мотора не обязательно равна напряжению Ubus, она зависит от динамических свойств системы инвертор-кабель-мотор, а также от времени нарастания выходного напряжения инвертора. Динамические свойства системы инвертор-кабель-мотор определяются параметрами кабельной линии и электродвигателя и в значительной степени длиной кабеля. На нижней осциллограмме рис.2 показана последовательность импульсов на зажимах мотора (длина кабеля 211 м), в каждой точке переключения ключей видны кратковременные пики напряжения, существенно превышающие напряжение в контуре 2
3 постоянного напряжения (Ubus). Амплитуда импульса достигает 1313 В, время нарастания напряжения при этом 1,2мкс. (допустимые значения для общепромышленного электродвигателя В, 2мкс). Эти импульсы напряжения, следующие с высокой частотой (до 20кГц), приводят к постепенному разрушению изоляции двигателя. Изоляция стареет и электродвигатель через некоторое время выходит из строя. Проблема заключается еще и в том, что выход из строя электродвигателя происходит не сразу после внедрения преобразователя частоты, а по истечению некоторого времени. И выход его из строя обслуживающим персоналом не связывается с негативным воздействием на него преобразователя частоты. Явление в результате которого на статорной обмотке электродвигателя появляются импульсы перенапряжения одно из названий: «Эффект длинной линии электропередачи, «Эффект отраженной волны» или «Эффект стоячей волны». На Рис. 4 показан одиночный импульс напряжения на зажимах двигателя, создавая неограниченную отраженную волну напряжения Upeak=1360В или Upeak =2.43pu для IGBT инвертора 400V, 50Гц для которого 3 6 2,34 2,34* 231 VDC U U U Общепринято обозначение характеризующее импульс перенапряжения рu=upeak/ubus. Важно отметить, что переходные процессы с эффектом отраженной волны происходят в электроприводе с любым видом силовых ключей инвертора, использующем ШИМ технологию, и зависят от несущей частоты ШИМ. Они не зависят от выходной 541 bus L1 L1 номинальной частоты инвертора. Важно понять, что двукратное перенапряжение на зажимах двигателя (pu=2) возможно на всех двигателях переменного тока при некоторой критической длине моторного кабеля независимо от типа переключающего ключа, используемого в инверторе. Для «медленного» ключа критическая длина моторного кабеля будет одна, для «быстрого» ключа — другая. Эта проблема обострилась с появлением на рынке «быстрых» IGBT транзисторов с очень малым временем переключения, так как критическая длина кабеля существенно снизилась до величин, которые чаще всего используются на практике (Рис. 5). Учитывая, что у современных ПЧ время нарастания импульса напряжения лежит в пределах нс критическая длина кабеля соответственно будет от 12 до 94 м. Рис. 4. Одиночный импульс выходного напряжения инвертора (верхняя осциллограмма) и напряжение на зажимах мотора (нижняя осциллограмма). Длина кабеля 211м, частота ШИМ 2 кгц, преобразователь частоты 0,75 квт, асинхронный двигатель 0,75 квт, 2820 об/мин 3
4 Критическая длина кабеля, м ООО «Интертранс», Смоленск; ; Зависимость lc от trise время переключения, нс Рис. 5. Зависимость критической длины кабеля от времени нарастания напряжения на выходе инвертора Способы борьбы с перенапряжением вызванных эффектом отраженной волны и временем нарастания импульса напряжения на зажимах двигателей Существует четыре способа борьбы с проблемами вызванными явлением отраженной волны: 1) ограничение амплитуды напряжения и времени его нарастания на зажимах двигателя с помощью выходных дросселей или фильтров. 2) использование специальных двигателей предназначенных для питания от преобразователей частоты; 3) сокращение длины кабеля; 4) изменение линейного напряжения инвертора с 400В на 240В; В данной работе рассматривается один из способов борьбы, а именно способ включения между преобразователем частоты и электродвигателем синус-фильтра типа EF3LC. С остальными способами можно ознакомиться в статьях «Обуздание отраженной волны», «Дроссели du/dt», «Моторные дроссели» Синус-фильтр типа EF3LC компании Elhand Transformatory, Польша полностью снимает рассматриваемую проблему, создаваемую ШИМ инвертором. На рисунках 6, 7, 8 этот факт иллюстрируется. Уровень гармоник напряжения на зажимах двигателя удалось снизить до THDf=6,8%, KFact=7,70. Из оставшихся высших гармоник доминирует 20 (1000Гц). В спектре тока выделяются 3, 20 и 21 гармоники. 4
5 Рис. 6. Напряжение двигателя (верхняя осциллограмма) и ток двигателя(нижняя осциллограмма). Синус фильтр типа EF3LC 30/2,1/1,41(30мГ, 2,1А, 1,41мкФ) на зажимах инвертора 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 211м Рис. 7. Спектр тока двигателя. Синус фильтр типа ED3SIN30/2,1/1,41(30мГ, 2,1А, 1,41мкФ) на зажимах инвертора 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 211м 5
6 Рис. 8. Спектр напряжения на зажимах двигателя. Синус фильтр типа ED3SIN30/2,1/1,41(30мГ, 2,1А, 1,41мкФ) на зажимах инвертора 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 211м Форма напряжения на моторе- практически чистая синусоида рис. 9, 10. Рис. 9. Напряжение на обмотках двигателя (красная осциллограмма) и напряжение на выходе инвертора (синяя осциллограмма). Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ) на зажимах инвертора 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 211м 6
7 Рис. 10. Напряжение на обмотках двигателя (красная осциллограмма) и напряжение на выходе инвертора (синяя осциллограмма). Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ) на зажимах инвертора 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 211м Напряжение на одной из обмоток моторного дросселя показано на рис. 11. Спектр гармоник — на рис. 12. Рис. 11. Напряжение на обмотке дросселя. Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м 7
8 Рис. 12. Спектр напряжения на обмотке дросселя. Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м Осциллограммы токов в линейном и фазном проводах конденсаторной группы показаны на рис. 13, 15. Спектры этих токов изображены на рис. 14, 16. Рис. 13. Ток в линейном проводе конденсатора. Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м 8
9 Рис. 14. Спектр тока в линейном проводе конденсатора. Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м Рис. 15. Ток в фазном проводе конденсатора. Синус фильтр типа EF3LC 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м Рис. 16. Спектр тока в фазном проводе конденсатора. Синус фильтр типа EF3LC 9
10 30/2,1/1,41 (30мГ, 2,1А, 1,41мкФ), инвертор 0,75кВт, 400В, 50Гц; ШИМ 2кГц, длина кабеля 11м При повышении частоты ШИМ до 5кГц снижает уровень гармоник напряжения и тока рис.9. Дальнейшее увеличение частоты ухудшает форму напряжения. Форма тока, при этом остается практически неизменной. THDf ток, % THDf напряжение, % 8,00 6,80 6,00 4,00 2,00 0,00 2,00 4,60 3,17 3,20 2 кгц 5 кгц 10 кгц 2,85 THDf ток, % THDf напряжение, % Частота ШИМ Рис. 17. Зависимости THDf тока и напряжения от частоты ШИМ. Двигатель 0,75 квт, преобразователь частоты 0,75 квт, синус фильтр на выходе. ВЫВОДЫ 1.Существенное отличие волнового сопротивления кабеля от волнового сопротивления двигателя, прежде всего, ответственно за величину перенапряжения на зажимах двигателя. 2. Время нарастания импульса напряжения на выходе инвертора, определяет критическую длину кабеля. 3. В случае питания общепромышленного двигателя от IGBT инвертора начиная с 12 метров моторного кабеля нужно принимать меры по ограничению параметров импульсов напряжения до допустимых значений 1000В, 2мкс. 4. Синус-фильтры существенно снижают уровень гармоник напряжения, делая практически идеальными синусоиды тока и напряжения. Синус фильтры рекомендуется применять при длинах кабелей более 200 м до 1000м и для ответственных механизмов или двигателей находящихся во взрывоопасной зоне. Источники [1] NEMA Recommended Motor-Generator Standards, MG Revision 1 Part 30 Section IV, Standard MG 1 Motors, Paragraph , Voltage Stress [2] NEMA Recommended Motor-Generator Standards, MG Revision 1 Part 31 Section IV, Definite Purpose Inverter Fed Motors, Paragraph , Voltage Spikes 10
docplayer.ru
Преобразователи частоты. Различие между ними.
Настоящим прорывом в области регулируемого электропривода стало появление силовых преобразователей частоты или как их именуют в профильной среде — частотников. Это открытие кардинально изменило подход в проектировании систем электроприводов. Если относительно недавно при проектировании сложных механизмов, где без точного регулирование параметров (скорость, момент) не обойтись, выбирались двигатели постоянного тока — ДПТ, то с появлением частотников привода переменного тока начали активно вытеснять двигатели постоянного тока из данных систем. Даже в тяговых электроприводах асинхронный двигатель с коротко-замкнутым ротором вытесняет ДПТ последовательного возбуждения.
Содержание:
Классификация преобразователей частоты
Техническое устройство, преобразующее переменное напряжения одной частоты на входе, в изменяющееся по определенному закону переменное напряжение, но уже другой частотой на выходе называется преобразователем частоты (ПЧ). Бывают двух типов:
- Непосредственные
- Двухзвенные
Непосредственные – это реверсивный тиристорный преобразователь. Главное его достоинство в том, что он подключается напрямую в сеть без дополнительных устройств.
Двухзвенные – представляют собой транзисторный или тиристорный преобразователь. Но главное их отличие от непосредственных преобразователей в том, что для корректной и безопасной работы инвертора необходимо звено постоянного напряжения. Соответственно для подключения их к общепромышленным сетям необходим выпрямитель. Как правило изготавливаются комплектными (инвертор и выпрямитель поставляются вместе и работают от одной системы управления).
Двухзвенные преобразователи частоты
Двухзвенный или как его еще называют со звеном постоянного тока, созданный на базе АИН (автономный инвертор напряжения), содержит в комплекте выпрямитель и фильтр:
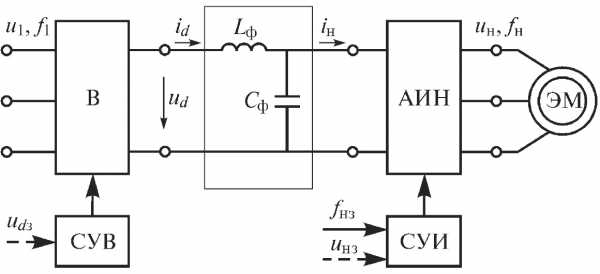
ЭМ – электрическая машина, АИН – автономный инвертор напряжения, Lф, Сф – индуктивности и емкости фильтра, fнз – задание частоты выхода инвертора, udз – задание выходного напряжения для выпрямителя, если используются управляемые выпрямители, СУВ, СУИ – системы управления выпрямителем и инвертором соответственно, uнз – задание выходного напряжения инвертора, В – выпрямитель. Пунктиром показаны связи, которые включаются в систему в зависимости от типа устройства.
Для улучшения качества энергии в звене постоянного напряжения и сглаживании пульсаций напряжения и тока используют L-C фильтр. Зачастую он имеют Г – образную схему включения, как показано выше. Также иногда используют фазовый сдвиг в цепи переменного напряжения путем включения обмоток трансформатора в треугольник и звезду:
Данная схема более дорогостоящая и может применяться только при использовании индивидуального трансформатора.
В данной системе выпрямитель может быть управляем или не управляем. Если он управляем, то функция регулирования напряжения ложится на него, если нет, то на АИН. Для рекуперации энергии в сеть выпрямитель должен быть полностью управляем и реверсивен (двухкомплектный). Управление частотным преобразователем производится импульсным методом. Самые распространенные методы это ШИР (широтно-импульсное регулирование) и ШИМ (широтно-импульсная модуляция).
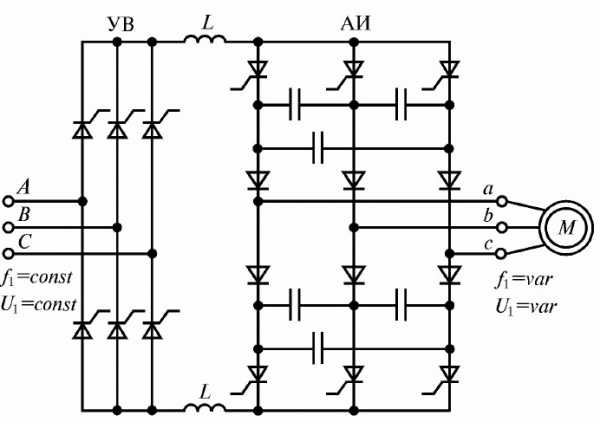
Еще более широкое применение получили автономные инверторы тока (АИТ):
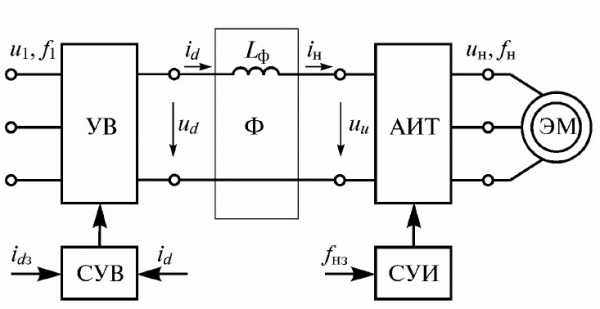
АИТ – автономный инвертор тока, СУИ, СУВ – системы управления преобразователями, УВ – управляемый выпрямитель, Lф – индуктивность фильтра, fнз – задание частоты выходного тока, іdз – задание выходного тока в звене постоянного тока.
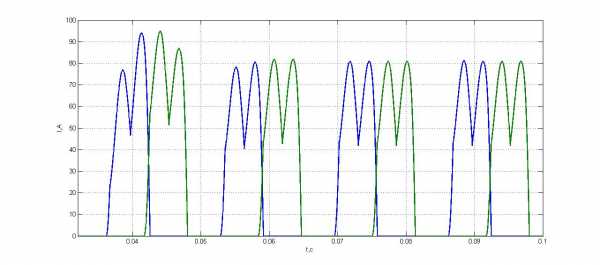
В отличии от АИН, где регулируемой выходной величиной является напряжение, в АИТ регулируемой величиной является ток. Немаловажную роль в формировании выходного сигнала заданной частоты является частота коммутации транзисторов или тиристоров. Чем выше частота коммутации, тем лучше качество синусоиды на выходе частотника, но возрастают потери в преобразователе. Ниже приведен результат моделирования работы АИТ (на IGBT транзисторах) на активно-индуктивную нагрузку при различных частотах коммутации:
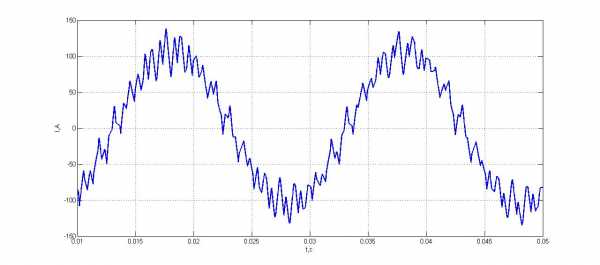 Частота коммутации 800 Гц
Частота коммутации 800 Гц Частота коммутации 2000 Гц
Частота коммутации 2000 Гц 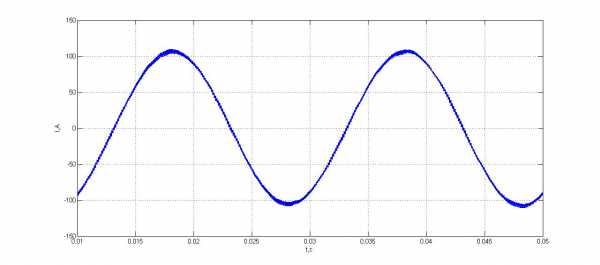
Частота коммутации 8000 Гц
Как видно из графиков уменьшение частоты коммутации очень плохо влияет на выходное качество тока. Поэтому для каждого устройства необходимо подбирать частоту коммутации частотника соответственно качеству выходного напряжения или тока. Для оптимизации данных процессов на выходе преобразователя частоты иногда ставят L-C фильтр, для сглаживания пульсаций токов и напряжений:
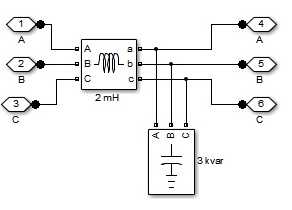
Как видим из схемы — последовательно подключают индуктивность, для сглаживания пульсаций тока, и параллельно емкость, для сглаживания пульсаций напряжения.
Также работа частотника генерирует высшие гармоники в питающей сети:
 Ток двух фаз питающего напряжения
Ток двух фаз питающего напряженияДля уменьшения влияния высших гармоник на сеть используют фильтро-компенсирующие устройства (ФКУ)
Ниже показаны принципиальные схемы преобразователей частоты.
Автономный инвертор напряжения с управляемым выпрямителем
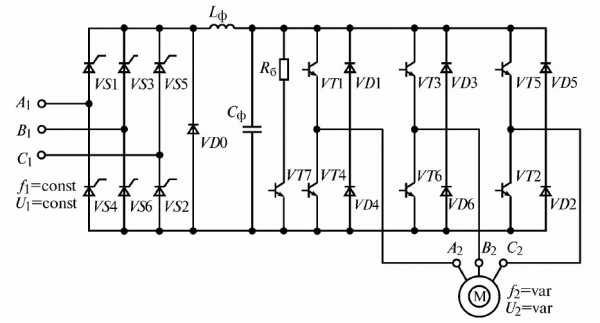
Тиристоры VS1-VS6 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. При увеличении напряжения на емкости Сф выше заданного, транзистор VT7 открывается и вводится в работу тормозной резистор Rб, на котором рассеивается энергия переданная от электрической машины. При глубоком регулировании VD0 повышает коэффициент мощности выпрямителя.
Данный ПЧ не может рекуперировать энергию в сеть, а также насыщает выходное напряжение высшими гармониками и усложняет систему управления из-за необходимости управления УВ. При исполнении УВ двухкомплектным, рекуперирует энергию в сеть, но усложняет систему и делает ее более дорогостоящей. В настоящее время является устаревшим.
Автономный инвертор напряжения с неуправляемым выпрямителем

Диоды VD7-VD12 выполняют роль выпрямителя. Транзисторы VT1-VT6 преобразуют постоянное напряжение в переменное заданной частоты. Диоды VD1-VD6 защищают транзисторы от перенапряжений, а также играет роль обратного выпрямителя при торможении машины. Транзистор VT7 выполняет роль ключа для резистора торможения Rб. За счет использования ШИМ происходит регулирование амплитуды выходного напряжения и его частоты.
При использовании неуправляемого выпрямителя для торможения двигателя АИН переводится в режим управляемого выпрямителя, работающего таким образом, что напряжение на емкости Сф выше заданного, несмотря на уменьшение скорости вращения двигателя. При увеличении напряжения на емкости Сф открывается транзистор VT7 и энергия выделяемая электродвигателем гасится на тормозном резисторе.
Данный способ торможения получил названия инверторного торможения, хотя инвертирования на самом деле нет. Это связано с тем, что термин динамическое торможение для систем с асинхронным двигателем занят, под ним понимается пропускания постоянного тока через обмотки двигателя.
Главным недостатком такой системы есть отсутствие возможности рекуперировать энергию в сеть, но она получила широкое применение для систем, где не требуется частое торможение.
Рекуперирующий двухзвенный преобразователь частоты на основе обратимого преобразователя напряжения
ОПН – обратимый преобразователь напряжения. В данной схеме имеется два ОПН. ОПН1 работает в выпрямительном режиме и передает энергию через ОПН2, работающий в инверторном режиме, к двигателю. При торможении ОПН2, подключенный к двигателю переходит в выпрямительный режим, а ОПН1, подключенный к сети, в инверторный режим. При этом происходит рекуперация энергии в сеть. Если задать схеме управления на входе cosφ = ± 1, то во всех режимах при регулировании и торможении двигателя из сети будет потребляться или в сеть будет отдаваться практически только активная мощность, а ток будет практически синусоидален, что определяет минимальное вредное влияние на питающую сеть. Эти преобразователи на сегодняшний день являются самыми близким к идеальным.
Ниже приведена функциональная схема данного устройства:
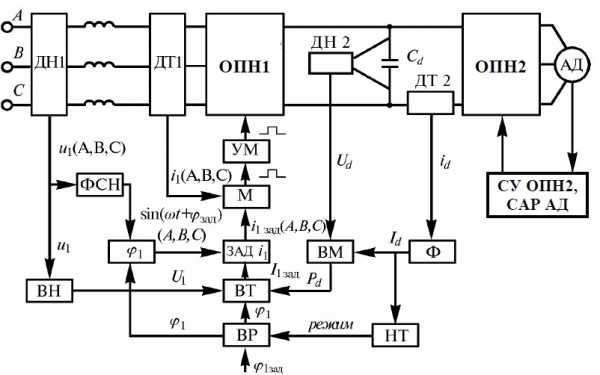
В схеме имеются следующие элементы: ОПН1, подключенный к сети, ОПН2, подключенный к двигателю, датчики тока и напряжения ДТ1 и ДН1 на стороне сети и ДТ2 и ДН2 на стороне постоянного напряжения. Требуемая мощность на стороне постоянного напряжения определяется измерением средних значений Ud и Id, а затем и мощности Pd с помощью вычислителя ВМ, куда поступают сигналы с ДН2 и ДТ2 через фильтр Ф. По действующему значению напряжения сети U1, определенному с помощью вычислителя напряжения ВН, и с учетом заданного угла φ1 определяется ток I1зад, обеспечивающий заданную мощность. Блок ФСН формирует синусоидальное напряжение, повторяющее напряжение сети, а блок «φ1» формирует заданную синусоиду с учетом фазового сдвига φ1. В блоке «ЗАД i1» формируется заданная синусоида тока. В модуляторе М она сравнивается с сигналом датчика тока ДТ1 i1, и формируются управляющие импульсы, которые через усилитель мощности УМ поступают на транзисторы. Блок НТ определяет направление тока (выпрямительный или инверторный режим). Блок выбора режима ВР в соответствии с сигналом от НТ задает угол φ1.
Преимущества двухзвенного рекуперирующего ПЧ: независимость выходной частоты от входной, возможность получения высокого коэффициента мощности на стороне сети. К недостаткам можно отнести: высокая стоимость, сложность системы управления.
Рекуперирующие двухзвенный преобразователь частоты на основе инверторов тока
Автономный инвертор тока, преобразовывает постоянный ток, подаваемый на его вход, в пропорциональный по величине переменный ток. Режим источника тока на входе обеспечивается за счет большой индуктивности L и применения токостабилизирующей обратной связи, поддерживающей заданное значение тока Idз. АИТ выполнен по схеме с отсекающими диодами. Рекуперация энергии при торможении в АИТ возможна при сохранении направления тока за счет сдвига токов и напряжений, т.е. переводом АИТ в режим выпрямления за счет сдвига управляющих импульсов относительно фазных ЭДС электрической машины.
Энергия, передаваемая от электрической машины на сторону постоянного напряжения, должна быть далее передана в сеть переменного напряжения. Для этого управляемый выпрямитель на входе ПЧ должен быть переведен в инверторный режим. При этом сохраняется направление тока и не требуется установка дополнительного комплекта вентилей. Схема применяется в двигателях достаточно большой мощности. Недостатками схемы являются ее не очень хорошие характеристики, поэтому она не является перспективной.
Появление запираемых тиристоров позволило улучшить характеристики ДПЧ на основе АИТ.

Формирование выходного тока осуществляется совместно управляемым выпрямителем и автономным инвертором тока.
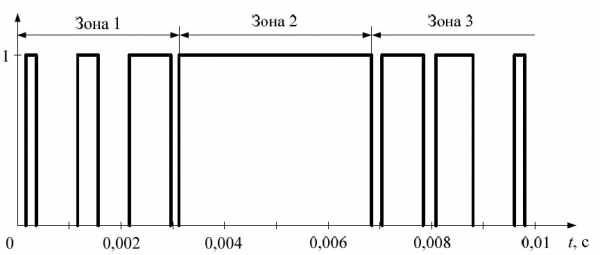
Показана временная диаграмма, отражающая моменты включенного и выключенного состояний тиристора V1. На участке соответствующим зоне 2, ключ V1 включен постоянно, и ток сглаживающего дросселя непрерывно поступает в фазу А двигателя. Для формирования тока в зонах 1 и 3 необходимо соответствующим образом переключать тиристоры. Для обеспечения нарастания и спадания тока (зоны 1 и 3) обычно используется два метода – трапецеидальный и метод выборочного исключения гармоник.
При использовании первого метода моменты коммутации ключей АИТ определяются по пересечению линейно нарастающего сигнала и опорного сигнала пилообразной формы следующего с несущей частотой, при втором методе моменты коммутации ключей рассчитываются заранее исходя из условия подавления высших гармоник определенного порядка (5 и 7 и т.д.). В этой схеме улучшается синусоидальность тока, протекающего по фазам двигателя. Но сохраняются все недостатки, возникающие при питании от сети управляемых выпрямителей напряжения. Преобразователи частоты на основе инверторов тока наиболее применимы в электроприводе синхронных машин, где на выходе вместо автономного инвертора тока включается инвертор тока, ведомый электрической машиной.
Таким образом, на входе и на выходе ПЧ включаются однокомплектные рекуперирующие преобразователи (ОРП) на тиристорах. При этом ведомый инвертор полностью аналогичен выпрямителю, подключенному к сети. Коммутация вентилей ведомого инвертора осуществляется за счет ЭДС электрической машины.При низкой скорости вращения электрической машины эта ЭДС недостаточна для коммутации вентилей. Поэтому при пуске коммутация осуществляется путем прерывания тока в цепи постоянного тока включением и запиранием выпрямителя.
Непосредственные преобразователи частоты
При использовании НПЧ напряжение из сети подается через управляемые вентили на двигатель. В каждой фазе НПЧ установлен реверсивный двухкомплектный преобразователь с совместным или раздельным управлением силовыми комплектами.
На рис. 1а приведена схема трехфазно-однофазного НПЧ на основе трехфазных нулевых схем. Он преобразует трехфазное напряжение в однофазное, но с регулируемой частотой.Комплекты В и Н переключаются, и на выходе получается двуполярное напряжение. Для управления преобразователями используют определенные законы управления — прямоугольный и синусоидальный. Если используют прямоугольный принцип управления, то алгоритм работы будет таков: при прохождении одной полуволны напряжения, на один из комплектов подаются управляющие импульсы с углом управления (углом задержки) a = const. Этот комплект будет работать в режиме выпрямителя, а затем с углом управления (углом опережения) b = a. Чтоб снизить ток необходимо перейти в инверторный режим (рис. 1 б). Для избежания короткого замыкания в самом инверторе необходимо чтоб ток снизился до нуля – это называется бестоковой паузой. После осуществления бестоковой паузы в работу включается второй комплект.
Если используют синусоидальное управление, то гладкая составляющая выходного напряжения должна изменятся по синусоидальному закону, для этого угол управления a непрерывно меняется (рис. 1 в).
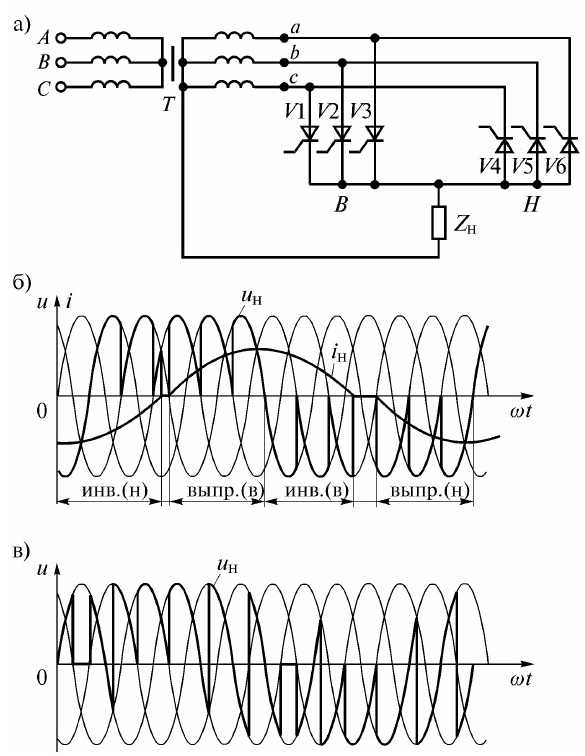 Рисунок 1.
Рисунок 1. Схема трехфазно-трехфазного НПЧ, выполненного на основе трехфазных мостовых схем. Ниже приведена схема.
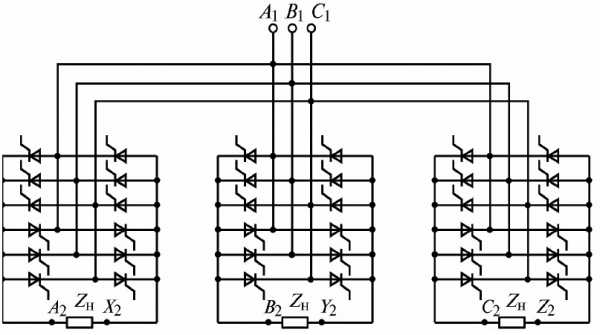
Данный тип преобразователей не получил широкого применения из-за ряда недостатков при его применении. А это: невозможность полного регулирования выходной частоты (при использовании трехфазных мостовых схем диапазон регулирования 25-45 Гц, а при нулевых 15-45 Гц). Постоянная коммутация вентилей, что приводит к ухудшению коэффициента мощности, а также плохое качество выходного напряжения и большое влияние на питающую сеть.
Преимуществом можно признать то, что у таких преобразователей более высокий КПД, из-за однократного преобразования энергии.
Наиболее распространены преобразователи частоты на базе АИТ и АИН на IGBT транзисторах, в силу лучших показателей качества энергии на выходе преобразователя и их влияния на сеть.
elenergi.ru
Частотные преобразователи. Работа и устройство. Типы и применение
Ротор электродвигателя начинает свое вращение с помощью электромагнитных сил от вращающегося магнитного поля, вызванного обмоткой якоря. Число оборотов определяется частотой тока в сети. Стандартное значение частоты тока составляет 50 герц. Это означает, что 50 периодов колебаний совершается за 1 секунду. В минуту число колебаний составит 50 х 60 = 3000. Значит, ротор будет вращаться 3000 оборотов в минуту.
Если научиться изменять частоту тока, то появится возможность регулировки скорости двигателя. Именно по этому принципу действуют частотные преобразователи.
Современное исполнение преобразователей частоты выглядит в виде высокотехнологичного устройства, состоящего из полупроводниковых приборов, совместно с микроконтроллером электронной системы. С помощью этой системы управления изменяются важные параметры электродвигателя, например, число оборотов.
Изменить скорость привода можно и с помощью механического редуктора шестеренчатого типа, либо на основе вариатора. Но такие механизмы имеют громоздкую конструкцию, их нужно обслуживать. С использованием частотника (инвертора) снижается расход на техническое обслуживание, повышается функциональность привода механизма.
Виды
По конструктивным особенностям частотные преобразователи делятся:
- Индукционные.
- Электронные.
Электродвигатели асинхронного типа с фазным ротором, подключенные в режим генератора, представляют подобие индукционного частотного преобразователя. Они имеют малые КПД и эффективность. В связи с этим такие виды преобразователей не нашли популярности в использовании.
Электронные виды частотников дают возможность плавного изменения оборотов электродвигателей.
При этом реализуются два возможных принципа управления:
- По определенной зависимости скорости от частоты тока.
- По способу векторного управления.
Первый принцип самый простой, но не совершенный. Второй принцип применяется для точного изменения оборотов двигателя.
Конструктивные особенности
Рис. 1
Частотные преобразователи имеют в составе основные модули:
- Выпрямитель.
- Фильтр напряжения.
- Инверторный узел.
- Микропроцессорная система.
Все модули связаны между собой. Действие выходного каскада (инвертора) контролирует блок управления, с помощью которого меняются свойства переменного тока. Частотный преобразователь для электромотора имеет свои особенности. В его состав входит несколько защит, управление которыми осуществляется микроконтроллером. Например, проверяется температура полупроводников, работает защита от превышения тока и короткого замыкания. Частотник подключается к сети питания через устройства защиты. Для запуска электродвигателя не нужен магнитный пускатель.
Выпрямитель
Это первый модуль, по которому проходит ток. Он преобразует переменный ток в постоянный, благодаря полупроводниковым диодам. Особенностью частотника является возможность его питания от однофазной сети. Разница в конструкции состоит в разных типах выпрямителей.
Если мы говорим про однофазный частотник для двигателя, то нужно использовать в выпрямителе четыре диода по мостовой схеме. При трехфазном питании выбирается схема из шести диодов. В итоге получается выпрямление переменного тока, появляется два полюса: плюс и минус.
Фильтр напряжения
Из выпрямителя выходит постоянное напряжение, которое имеет значительные пульсации, заимствованные от переменного тока. Для их сглаживания используют такие элементы, как электролитический конденсатор и катушка индуктивности.
Катушка имеет много витков, и обладает реактивным сопротивлением. Это дает возможность сглаживать импульсы тока. Конденсатор, подключенный к двум полюсам, имеет интересные характеристики. При прохождении постоянного тока он в силу закона Киргофа должен быть заменен обрывом, как будто между полюсами ничего нет. При прохождении переменного тока он должен быть проводником, то есть, не иметь сопротивления. В результате доля переменного тока замыкается и исчезает.
Инверторный модуль
Это узел, имеющий наибольшую важность в преобразователе частоты. Он изменяет параметры тока выхода, состоит из шести транзисторов. Для каждой фазы подключены по два транзистора. В каскаде инвертора применяются современные транзисторы IGBT.
Если изготавливать частотные преобразователи своими руками, то необходимо выбирать элементы конструкции, исходя из мощности потребления. Поэтому нужно сразу определить тип электродвигателя, который будет питаться от частотника.
Микропроцессорная система
В самодельной конструкции не получится добиться таких параметров, имеющихся у заводских моделей, так как в домашних условиях сделать управляющий модуль сложно. Дело не в пайке деталей, а в создании программы для микроконтроллера. Простой способ – это сделать управляющий блок, которым можно регулировать обороты двигателя, осуществлять реверс, защищать двигатель от перегрева и перегрузки по току.
Чтобы изменить обороты мотора, нужно применить переменное сопротивление, подключенное к вводу микроконтроллера. Это устройство подает сигнал на микросхему, которая производит анализ изменения напряжения и сравнивает его с эталоном (5 вольт). Система действует по алгоритму, который создается до начала создания программы. По нему действует микропроцессорная система.
Приобрели большую популярность управляющие модули Siemens. Частотные преобразователи этой фирмы надежны, могут применяться для любых электродвигателей.
Принцип действия
Основа работы инвертора состоит в двойном изменении формы электрического тока.
Напряжение подается на блок выпрямления с мощными диодами. Они удаляют гармонические колебания, однако оставляют импульсы сигнала. Чтобы их удалить, подключен конденсатор с катушкой индуктивности, образующие фильтр, который стабилизирует форму напряжения.
Далее, сигнал идет на частотный преобразователь. Он состоит из шести мощных транзисторов с диодами, защищающими от пробоя напряжения. Ранее для таких целей применялись тиристоры, но они не обладали таким быстродействием, и создавали помехи.
Чтобы подключить режим замедления мотора, в схему устанавливают транзистор управления с резистором, который рассеивает энергию. Такой способ дает возможность удалять образуемое двигателем напряжение, чтобы защитить емкости фильтра от выхода из строя вследствие перезарядки.
Метод управления векторного типа частотой инвертора дает возможность создания схемы, которая автоматически регулирует сигнал. Для этого применяется управляющая система:
- Амплитудная.
- Широтно-импульсная.
Амплитудная регулировка работает на изменении напряжения входа, а ШИМ – порядка действия переключений транзисторов при постоянном напряжении на входе.
При регулировании ШИМ образуется период модуляции, когда обмотка якоря подключается по очереди к выводам выпрямителя. Так как тактовая частота генератора высокая и находится в интервале 2-15 килогерц, то в обмотке мотора, имеющего индуктивность, осуществляется сглаживание напряжения до нормальной синусоиды.
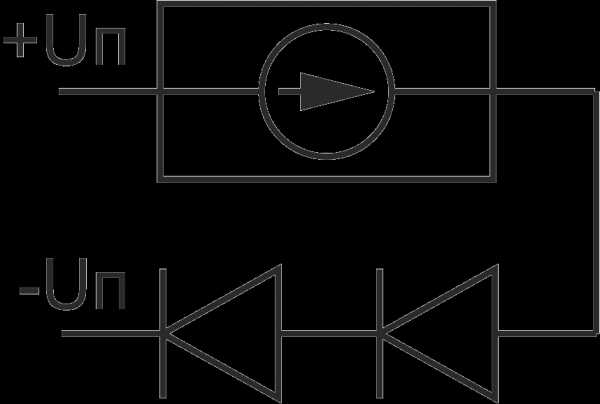
Принцип подключения ключей на транзисторах
Каждый из транзисторов включается по встречно-параллельной схеме к диоду (Рис. 1). Через цепь транзистора протекает активный ток электродвигателя, реактивная часть поступает на диоды.
Чтобы исключить влияние помех на действие инвертора и электродвигателя, в схему подключают фильтр, который удаляет:
- Радиопомехи.
- Помехи от электрооборудования.
Об их образовании дает сигнал контроллер, чтобы снизить помехи, применяются экранированные провода от двигателя до выхода инвертора.
Чтобы оптимизировать точность функционирования асинхронных двигателей, в цепь управления инверторов подключают:
- Ввод связи.
- Контроллер.
- Карта памяти.
- Программа.
- Дисплей.
- Тормозной прерыватель с фильтром.
- Охлаждение схемы вентилятором.
- Прогрев двигателя.
Схемы подключения
Частотные преобразователи служат для работы в 1-фазных и 3-фазных сетях. Но если имеются промышленные источники питания на 220 вольт постоянного тока, то инверторы также можно подключать к ним.
Частотные преобразователи для 3-фазной сети рассчитаны на 380 вольт, их подают на мотор. 1-фазные частотники работают от сети 220 вольт, выдают на выходе 3 фазы. Частотник может подключаться к электродвигателю по схеме звезды или треугольника.
Обмотки мотора соединяются в «звезду» для частотника, работающего от трех фаз 380 вольт.
Обмотки двигателя соединяют «треугольником», когда инвертор запитан от 1-фазной сети.
При выборе метода подключения электродвигателя к частотнику необходимо определить мощности, которые создает двигатель на разных режимах, в том числе и медленный режим, тяжелый запуск. Преобразователь частоты нельзя эксплуатировать с перегрузкой длительное время. Его мощность должна быть с запасом, тогда работа будет без аварий, и срок службы продлится.
Применение
Частотные преобразователи используются в устройствах с необходимостью регулировки скорости двигателя.
- Приводы насосов. Уменьшает потери тепла и воды на 10%. Снижает количество аварий, защищает электродвигатели.
- Вентиляционные системы. Экономия больше, чем при работе с насосами, так как для запуска мощных вентиляторов применяют мощные приводы агрегатов. Экономия появляется за счет снижения потерь на холостом ходу.
- Транспортеры. Инверторы адаптируют скорость двигателя к скорости технологической системы, которая постоянно изменяется. Мягкий пуск повышает ресурс привода системы, так как нет ударных нагрузок, которые вредят оборудованию.
- Компрессоры.
- Дымососы.
- Центрифуги.
- Лифтовое оборудование.
- Оборудование в деревообработке.
- Робототехника.
Преимущества
- Сглаживание работы мотора при запуске и торможении.
- Возможность управления группой двигателей.
- Плавное управление скоростью электродвигателей, без использования редукторов и других механических систем. Это позволяет упростить управление, сделать его дешевле и надежнее.
- Используются совместно с асинхронными двигателями для замены приводов постоянного тока.
- Образование многофункциональных систем управления приводами.
- Изменение настроек непосредственно в работе, без останова.
Похожие темы:
electrosam.ru
10. Преобразователи частоты
Преобразователи частоты — это устройства, преобразующие переменный ток одной частоты в переменный ток другой частоты.
Различают два класса преобразователей частоты: с непосредственной связью; с промежуточным звеном постоянного тока.
Последние подразделяются на:
а) со звеном постоянного тока;
б) со звеном постоянного напряжения;
в) резонансные.
По количеству фаз выпускают:
а) однофазные;
б) трёхфазные.
По способу управления ключами схем применяют:
а) векторное;
б) скалярное;
в) с модуляцией по частоте;
г) с модуляцией по фазе или периоду.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
По величине питающего напряжения выпускают низковольтные и высоковольтные преобразователи [11].
В высоковольтных используются следующие схемные решения:
1) двухтрансформаторная схема преобразователя частоты;
2) схема преобразователя с последовательным включением ключей;
3) схема преобразователя с многообмоточным трансформатором.
10.1. Преобразователь с непосредственной связью
Исторически первый преобразователь — это преобразователь с непосредственной связью (рис.10.1). . В настоящее время преобразователи с непосредственной связью практически не находят применения из-за узкого диапазона вторичных частот. Преобразователь представляет управляемый выпрямитель на тиристорах, в котором в силовой части система управления поочерёдно подключает статорные обмотки к питающей сети.
Таким
образом, выходное напряжение преобразователя
формируется из «вырезанных» участков
синусоид входного напряжения.
На рис.10.1,б.
показан пример формирования выходного
напряжения для одной из фаз нагрузки.
На входе преобразователя действует
трехфазное синусоидальное напряжение uа,
uв,
uс.
Выходное напряжение uвых имеет несинусоидальную «пилообразную»
форму, которую условно можно аппроксимировать
синусоидой. 
а б
Рис.10.1. Схема преобразователя с непосредственной связью
Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие — малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
10.2. Преобразователи с промежуточным звеном
Такие преобразователи подразделяются на преобразователи частоты с непосредственной связью и естественной коммутацией тока тиристоров и с непосредственной связью с искусственной коммутацией тока тиристоров. Преобразователи с промежуточным звеном постоянного тока позволяют регулировать выходную частоту при помощи системы управления инвертора СУИ в широком диапазоне как вверх, так и вниз от частоты питающей сети. Данный тип преобразователей частоты имеет простую схему силовой части, а следовательно, и системы управления.
В синхронном электрическом двигателе частота вращения ротора в установившемся режиме равна частоте вращения магнитного поля статора . В асинхронном электрическом двигателе частота вращения ротора отличается от частоты вращения на величину скольжения .
Частота вращения магнитного поля зависит от частоты напряжения питания. При питании обмотки статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле ω1 = , (10.1)
где р – число пар полюсов статора.
Переход от скорости вращения поля ω1, измеряемой в радианах, к частоте вращения , выраженной в оборотах в минуту, осуществляется по следующей формуле: = 60ω1/ 2π, (10.2)
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля ω1,получим, что = . (10.3)
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питающей сети.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя КПД, коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживаются постоянным отношением максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя. Максимальный момент, развиваемый двигателем, определяется следующей зависимостью между напряжением и частотой:
Ммах = , (10.4)
где — постоянный коэффициент.
При постоянстве перегрузочной способности номинальные коэффициент мощности и КПД двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Но на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды ещё и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление». Для управления вектором тока, а следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты. Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна. Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
Структурная схема преобразователи частоты с промежуточным звеном постоянного тока показана на рис. 10.2. Напряжение сети выпрямляется управляемым выпрямителем 1, имеющим систему управления СУВ, фильтруется LC-фильтром 2 и подается на автономный инвертор АИ-3. Функции регулирования частоты выходного напряжения осуществляет инвертор, а напряжения – выпрямитель. Иногда обе функции совмещает инвертор, а выпрямитель выполняют неуправляемым. Основным недостатком преобразователя частоты с промежуточным звеном постоянного тока является двойное преобразование энергии – выпрямление и инвертирование, что приводит к снижению КПД и ухудшению массогабаритных показателей. В преобразователях частоты с промежуточным звеном постоянного тока можно осуществить свободный обмен электрической энергией между потребителем и питающей сетью в обоих направлениях. Для такого обмена требуются полностью управляемые вентили с двухсторонней проводимостью.
Промышленность выпускает IGBT транзисторы и силовые полевые транзисторы на токи до 60 А и напряжение до 1200 В. Они имеют более высокий КПД (до 98 %) по отношению к преобразователям на IGBT транзисторах.
Преобразователи частоты с промежуточным звеном постоянного тока применяют для питания электрических двигателей, частоту вращения ротора которых необходимо варьировать в широких пределах при пуске, торможении и регулировании скорости.
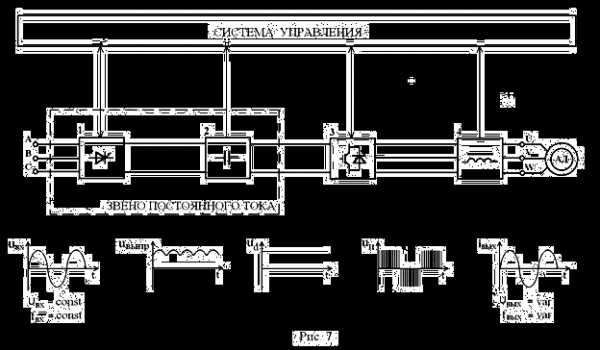
Рис. 10.2. Преобразователь частоты с промежуточным звеном постоянного тока
В соответствии с современным направлением развития науки и техники преобразователи частоты строят на регулируемых выпрямителях и инверторах управляемых однокристальной микро ЭВМ (рис.10.3).
Для силовой части преобразователя используют тиристоры и мощные полевые и IGBT-транзисторы. Инвертор преобразователя частоты на тиристорах имеет большую стоимость, вес, габариты, более сложный монтаж, конструкцию и меньшую надежность. Транзисторный преобразователь частоты основан на широтно-импульсной модуляции. Для управления преобразователем, питающем трехфазный двигатель, используется контроллер, имеющий 6 выходов ШИМ: по два на каждую фазу – один для верхней полуволны, другой для нижней. Также микроконтроллер должен обеспечивать возможность введения обратных связей, а значит, иметь АЦП, цифровые вводы–выводы для создания программных клавиш, возможность программирования и перепрограммирования с персональной ЭВМ. В схеме встроены цепи защиты, которые предохраняют силовые устройства от повреждений в случае системного сбоя или перенапряжения. Эти цепи обнаруживают неисправность и производят отключение схемы. Защита предусмотрена в следующем объеме: защита от тока короткого замыкания; минимальная защита по управляющему напряжению; температурная защита.

Рис. 10.3. Схема транзисторного преобразователя частоты с цифровым управлением
Также у силового драйвера предусмотрен выходной сигнал ошибки
FAULT, чтобы предупреждать контроллер о срабатывании какой-либо защиты. В случае срабатывания цепи защиты на выходе драйвера формируется сигнал FAULT и контроллер прекращает ШИМ модуляцию. Для согласования уровней напряжения на выходах контроллера и входах силовых транзисторов предусмотрена гальваническая развязка на диодно-транзисторных оптронах АОТ.
Три АОТ, управляющие нижними транзисторами JGBT, питаются от общего выпрямителя + 15 В, а три верхних АОТ, управляющие верхними тремя IGBT c плавающим потенциалом управления, питаются от трех изолированных выпрямителей + 15 В. Для исключения этих выпрямителей используются бустреповые емкости С1 С2, заряжаемые через диодно-резисторные цепочки от выпрямителя + 15 В питающего. Для согласования уровней напряжений на выходе МЭВМ и входах силовых транзисторов предусмотрена гальваническая развязка на диодно-транзисторных оптронах АОТ. Три АОТ, управляющие нижними IGBT,нижние АОТ. Величина резистора датчика тока, включенного в цепь N-N1, выбирается в зависимости от мощности электродвигателя М, а интегрирующее звено R1-C5 исключает ложные срабатывания защиты в моменты коммутации ключей. Если сигнал с шунта превысит 0,6 В, то все ключи закрываются и выдается сигнал ошибки FAULT на ОЭВМ. На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных единичных модулей с меньшим рабочим напряжением. Количество модулей определяется величиной рабочего напрясжения и током нагрузки. 10.3. Высоковольтные преобразователи частоты
В последние годы большое внимание, которое диктуется потребностями рынка, уделяют разработке и созданию высоковольтных частотных преобразователей. Требуемая величина выходного напряжения преобразователя частоты для высоковольтного электропривода достигает 10 кВ и выше при мощности до нескольких десятков мегаватт. Вентильные высоковольтные преобразователи частоты предназначены для частотного пуска и регулирования скорости вращения высоковольтных электродвигателей, мощностью 250-5000 кВт. Они преобразуют электрическую энергию трехфазной сети переменного тока промышленной частоты напряжением 3, 6 или 10 кВ в трехфазное напряжение с параметрами частоты и напряжения, изменяемыми по закону частотного регулирования. Существует четыре основные схемы построения вентильных преобразователя со звеном постоянного тока:
— прямого преобразования ПЧСВ;
— с низковольтным звеном ПЧСН;
— многоуровневые;
— каскадные.
Электропривод прямого преобразования ПЧСВ находит применение, если напряжение питающей сети и номинальное напряжение двигателя соответствуют напряжению преобразователя частоты. Функциональная схема такого электропривода показана на рис.10.4.

Рис. 10.4. Электропривод прямого преобразования ПЧСВ: В — управляемый выпрямитель; РТ — входной реактор; ДТ — датчик тока: ДС — сглаживающие дроссели; И — инвертор; СУВ — система управления выпрямителем; СУИ — система управления инвертором; Тн — измерительные трансформаторы напряжения; ТВ — тиристорный возбудитель; ОВ — обмотка возбуждения синхронного двигателя
ПЧСВ включает в себя высоковольтный выпрямитель, инвертор и сглаживающий дроссель в цепи постоянного тока. Нагрузкой инвертора является приводной двигатель. Для симметрирования силовой схемы преобразователя сглаживающие дроссели выполняются с расщепленной обмоткой (с двумя полуобмотками). Обмотки дросселя включаются последовательно в оба полюса звена постоянного тока. Возможно применение двух независимых дросселей. Такое построение позволяет снизить воздействие на изоляцию двигателя по отношению к земле. Входной реактор (РТ) предназначен для ограничения аварийных токов короткого замыкания на безопасном для силовых приборов уровне.
Силовые схемы управляемого выпрямителя и инвертора построены на базе трехфазных мостов. Каждое из шести вентильных плеч выпрямителя (инвертора) составлено из n последовательно включенных вентилей (тиристоров и IGBT-транзисторов). Число вентилей зависит от класса питающего напряжения. Силовые вентили, характеризующиеся разбросом заряда восстановления, шунтируются цепями динамического распределения напряжения по последовательно включенным вентилям при коммутации. Параметры цепей распределения выбраны с учетом максимальной величины разброса заряда восстановления при максимальной нагрузке, а также с учетом параметров нелинейного токоограничивающего дросселя, включенного в каждую вентильную цепь. Для повышения надежности и исключения развития аварии осуществляется контроль целостности индивидуально каждого силового вентиля.
studfile.net
8.8. Преобразование частоты
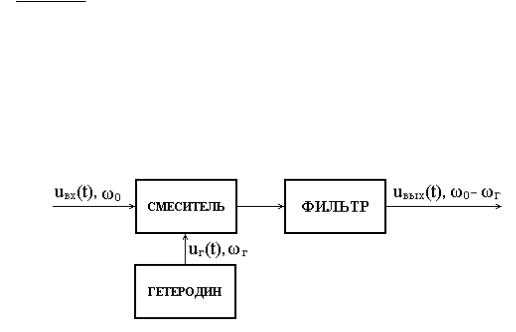
8.8.1.Принцип преобразования частоты
Преобразование частоты сигнала – это процесс, который обеспечивает линейный перенос спектра сигнала на оси частот без изменения его структуры. Огибающая сигнала и его начальная фаза при этом не изменяются. Другими словами, преобразование частоты не искажает закон изменения амплитуды, частоты или фазы модулированных колебаний.
Как видно из определения, преобразование частоты сопровождается появлением новых составляющих спектра, т.е. приводит к обогащению спектра сигнала. Поэтому такой процесс можно реализовать только с использованием нелинейного или параметрического устройств, обеспечивающих умножение преобразуемого сигнала на вспомогательное гармоническое колебание с последующим выделением необходимой области частот.
Действительно, если на вход умножителя подать два сигнала: uвх (t) U(t)cos[ 0t (t)] и uг(t) Uг cos( гt г ),
то на выходе получим сигнал суммарной и разностной частот:
uвых (t) KU (t)Uг cos[ 0t (t)]cos( гt г )
KU(t)Uг cos[( 0 г)t (t) г] cos[( 0 г)t (t) г] , 2
где K – коэффициент передачи умножителя.
Выходной фильтр, настроенный, например на разностную частоту, выделит составляющую разностной (промежуточной) частоты. Такое нелинейное устройство называют смесителем, а источник гармонического колебания – гете-
родином.
Структурная схема преобразователя частоты представлена на рис. 8.41.
Рис. 8.41. Структурная схема преобразователя частоты
Преобразование частоты применяется в супергетеродинных приемниках для получения сигнала с промежуточной частотой. Величина промежуточной частоты fпр должна быть таковой, чтобы без особых затруднений достигалось
большое усиление при высокой избирательности приемника. В радиовещательных приемниках длинных, средних и коротких волн fпр 465 кГц, а в прием-
никах с частотной модуляцией (в метровом диапазоне волн) – fпр 10,7 МГц.
Преобразование частоты сигнала используется также в приемниках радиолокационных станций, в измерительной технике (анализаторах спектра, генераторах и др.).
8.8.2. Схемы преобразователей частоты
Как было сказано выше, процесс преобразования частоты реализуется путем умножения преобразуемого сигнала на вспомогательное гармоническое колебание с последующим выделением необходимой области частот. Это можно сделать двумя способами, которые положены в основу построения практических схем преобразователей частоты:
1.Сумма двух напряжений (полезного сигнала и сигнала гетеродина) подается на нелинейный элемент с последующим выделением необходимых составляющих спектра тока. В качестве нелинейных элементов используются диоды, транзисторы и другие элементы с нелинейной характеристикой.
2.Напряжение гетеродина используется для изменения какого-либо параметра смесителя (крутизны ВАХ транзистора, реактивного параметра цепи). Полезный сигнал, подаваемый на вход такого смесителя, преобразуется с соответствующим обогащением спектра.
Для выяснения основных особенностей процесса преобразования частоты рассмотрим некоторые схемы преобразователей частоты.
а. Преобразователи частоты на диодах
Схема одноконтурного преобразователя частоты на диоде представлена на рис. 8.42.
Рис. 8.42. Одноконтурный преобразователь частоты на диоде
На вход преобразователя поступают два сигнала:
модулированный узкополосный сигнал uвх(t) U(t)cos[ 0t (t)], несущая частота которого должна быть перенесена, скажем, в область более низких частот;
сигнал гетеродина uг(t) Uг cos( гt г) с постоянной амплитудой, частотой и начальной фазой.
Таким образом, на нелинейный элемент подается напряжение
u(t) uвх (t) uг(t) U(t)cos[ 0t (t)] Uг cos( гt г).
Аппроксимируем ВАХ диода полиномом второй степени
i a0 a1u a2u2 .
Тогда ток диода можно представить следующим образом:
i(t) a0 a1uвх(t) a1uг(t) a2uвх2 (t) a2uг2(t) 2a2uвх(t)uг(t).
Слагаемые, содержащие только uвх(t), uг(t), uвх2 (t), uг2(t), соответствуют со-
ставляющим в спектре тока диода, имеющим частоты 0, г , 2 0 и 2 г . Следовательно, они, с точки зрения преобразования частоты, интереса не представляют. Основное значение имеет последнее слагаемое. Именно оно свидетельствует о наличии в спектре тока составляющих с преобразованными частотами
0 г и 0 г :
2a2uвх (t)uг(t) 2a2U(t)cos[ 0t (t)]Uг cos( гt г)
а2U(t)Uг cos[( 0 г )t (t) г ] а2U(t)Uг cos[( 0 г )t (t) г ].
Составляющая с частотой н 0 г соответствует сдвигу спектра сигнала в
область низких частот, а составляющая с частотой в 0 г – в область высоких частот.
Выходное напряжение с необходимой частотой формируется с помощью фильтра (колебательного контура) на выходе преобразователя, настроенного на соответствующую частоту. Фильтр должен выделить одну составляющую из семи. Полагая, что фильтр настроен на разностную (промежуточную) частоту
пр 0 г, получим напряжение на выходе преобразователя, равное
uвых (t) i(t)R0 | а2U (t)Uг R0 cos[( 0 | г )t (t) г ] . | (8.4) |
Таким образом, избирательная система должна иметь такую полосу пропускания, чтобы отфильтровать все ненужные (паразитные) составляющие. В то же время при преобразовании частоты модулированного сигнала полоса пропускания должна быть соизмерима с шириной спектра сигнала. В этом случае структура выходного сигнала совпадает со структурой сигнала на входе. Амплитуды
U(t) и Uг должны выбираться с таким расчетом, чтобы в выражении (8.4) преобладающее значение имели слагаемые с комбинационными частотами. Преоб-
разование частоты часто сопровождается усилением полезного сигнала, поэто-
му обычно соблюдается соотношение Uг U(t).
При 0 г или г 0 расстройка частот 0 г, 0 г и 0, г весьма мала. При этом составляющие с частотами сигнала или гетеродина не будут отфильтрованы избирательной системой. Нежелательно также применение этой системы при решении задачи преобразования частоты в диапазоне акустических частот. В этом случае целесообразно использовать балансные схемы, которые обеспечивают самоликвидацию (компенсацию) ненужных составляющих. На рис. 8.43,а и рис. 8.43,б приведены схемы таких преобразователей на диодах.
Рис. 8.43. Балансные преобразователи частоты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||
В схеме рис. 8.43,а выходное напряжение равно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
uвых (t) u1(t) u2(t) [i1(t) i2(t)]R, |
|
|
|
|
|
|
|
|
| (8.5) |
|
|
|
|
| ||||||||||||||||||
где | i (t) a | 0 | a u | (t) a u | (t) a | 2 | u2 | (t) a | 2 | u2 | (t) 2a | 2 | u | вх | (t)u | г | (t) | . | |||||||||||||||
1 |
|
|
| 1 вх |
| 1 г |
|
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
|
| ||||||||||
i (t) a | 0 | a u | вх | (t) a u | (t) a | 2 | u2 (t) a | 2 | u2(t) 2a | 2 | u | вх | (t)u | г | (t) | . |
|
|
| ||||||||||||||
2 |
| 1 |
|
| 1 г |
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
При получении выражения для i2(t) учтено, что напряжение сигнала подается на диоды схем в противофазе, а напряжение гетеродина – в фазе.
Подставляя выражения для i1(t) и i2(t) в формулу (8.5), получаем
uвых(t) [2a1uвх(t) 4a2uвх(t)uг(t)]R.
uвых(t) {2a1U(t)cos[ 0t (t)] 2a2U(t)Uг cos[( 0 г)t (t) г]
2a2U (t)Uг cos[( 0 г )t (t) г ]}R .
Отсюда видно, что на выходе балансного преобразователя рис. 8.43,а отсутст-
вуют составляющие с частотами, равными 0, г , 2 0, 2 г , что упрощает решение задачи получения выходного сигнала необходимой частоты. Тем не ме-
нее к выходу такого преобразователя также необходимо подключать избирательную систему с целью фильтрации сигнала с требуемой частотой.
Балансный преобразователь рис. 8.43,б представляет собой схему, совмещающую два балансных преобразователя. На диоды различных ветвей подаются напряжения сигнала и гетеродина с различными фазами. Работа такого преобразователя поясняется следующими формулами:
uвых(t) u1(t) u2(t) u3(t) u4(t) [i1(t) i2(t) i3(t) i4(t)]R, (8.6)
где | i (t) a | 0 | a u | вх | (t) a u | (t) a | 2 | u2 (t) a | 2 | u2(t) 2a | 2 | u | вх | (t)u | г | (t) | ; | |||||||||||||||||
1 |
|
|
| 1 |
|
| 1 г |
|
|
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
| ||||||||||
i (t) a | 0 | a u | вх | (t) a u | г | (t) a | 2 | u2 | (t) a | 2 | u2 | (t) 2a | 2 | u | вх | (t)u | г | (t) | ; |
|
|
| ||||||||||||
2 |
| 1 |
|
| 1 |
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
i (t) a | 0 | a u | вх | (t) a u | г | (t) a | 2 | u2 | (t) a | 2 | u2 | (t) 2a | 2 | u | вх | (t)u | г | (t) | ; |
|
|
| ||||||||||||
3 |
| 1 |
|
| 1 |
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
i (t) a | 0 | a u | вх | (t) a u | г | (t) a | 2 | u2 | (t) a | 2 | u2 | (t) 2a | 2 | u | вх | (t)u | г | (t) | . |
|
|
| ||||||||||||
4 |
| 1 |
|
| 1 |
|
| вх |
|
|
| г |
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
Подставляя выражения для i1(t), i2(t), i3(t) и i4(t) в формулу (8.6), получаем uвых(t) 8a2uвх(t)uг(t)R.
uвых(t) {4a2U(t)Uг cos[( 0 г)t (t) г]
4a2U(t)Uг cos[( 0 г )t (t) г ]}R .
На выходе преобразователя рис. 8.44,б отсутствует составляющая с частотой сигнала 0 (составляющие с частотами 0, г , 2 0, 2 г также отсутствуют). Фильтр на выходе такого преобразователя должен выделить одну составляющую из двух.
б. Транзисторные преобразователи частоты
В приемных каналах радиотехнических систем широко используются преобразователи частоты на транзисторах. При этом различают схемы преобразователей, в которых функции смесителя и гетеродина совмещены, и схемы преобразователей с подачей сигнала гетеродина извне. Более стабильную работу обеспечивает последний класс преобразователей.
По способу включения транзисторов различают:
1. Преобразователи с включением транзистора по схеме с общим эмиттером и по схеме с общей базой.
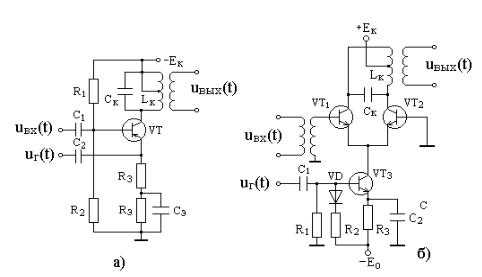
Преобразователи с общим эмиттером используются чаще, т.к. имеют лучшие шумовые характеристики и больший коэффициент усиления по напряжению. Напряжение гетеродина может быть подано в цепь базы или в цепь эмиттера. В первом случае достигается больший коэффициент усиления, во втором случае – лучшая стабильность коэффициента усиления и хорошая развязка между сигнальным и гетеродинным контурами.
2.Преобразователи на усилителях с каскодным включением транзисторов.
3.Преобразователи на дифференциальном усилителе.
4.Преобразователи на полевых транзисторах (с одним и двумя затворами). Основные свойства и характеристики последних трех групп преобразовате-
лей определяются свойствами усилителей, на основе которых они построены. На рис. 8.44 приведены схемы преобразователей частоты на плоскостных
транзисторах.
В схеме рис. 8.44,а напряжение сигнала подается в цепь базы транзистора, напряжение гетеродина – на эмиттер. Контур в цепи коллектора настроен на промежуточную частоту. Сопротивления R1 и R2 обеспечивают необходимый режим работы усилителя (положение рабочей точки), сопротивление Rэ и емкость Cэ – термостабилизацию положения рабочей точки. Преобразование частоты осуществляется за счет изменения с частотой сигнала гетеродина коэффициента передачи усилительного каскада (крутизны ВАХ транзистора).
Рис. 8.44. Схемы преобразователей частоты на плоскостных транзисторах
Транзисторный преобразователь частоты, изображенный на рис. 8.44,б, построен с использованием дифференциального усилителя. На его вход подается преобразуемый сигнал, а на базу транзистора VT3 генератора стабильного тока подается сигнал гетеродина. Коэффициент усиления и коэффициент шума таких преобразователей примерно равны соответствующим коэффициентам усилительного каскада.
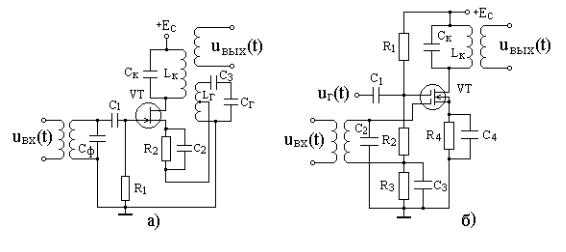
Схемы преобразователей частоты на полевых транзисторах приведены на рис. 8.45,а – схема с совмещенным гетеродином и рис. 8.45,б – схема с использованием полевого транзистора с двумя изолированными затворами.
Рис. 8.45. Схемы преобразователей частоты на полевых транзисторах
На рис. 8.45,а полевой транзистор с затвором в виде p-n-перехода выполняет роль смесителя и гетеродина одновременно. Сигнал uвх(t) поступает на затвор транзистора. Напряжение гетеродина uг(t) с части гетеродинного контура LгCг подается в цепь истока транзистора. Необходимый режим транзистора обеспечивается соответствующим выбором рабочей точки с помощью цепи автоматического смещения R2C2. Резистор R1 в цепи затвора обеспечивает стекание зарядов, скапливающихся на затворе. Нагрузка преобразователя – полосовой фильтр, настроенный на необходимую комбинационную частоту стокового тока. Так как входное и выходное сопротивления полевого транзистора довольно велики, то входной контур к затвору и контур полосового фильтра к стоку подключаются полностью.
В схеме транзисторного преобразователя частоты на полевом транзисторе с двумя изолированными затворами (рис. 8.45,б) оба затвора используются в качестве управляющих электродов. По существу транзистор работает под воздействием суммы двух напряжений. Напряжение uвх(t) создается преобразуемым сигналом, подаваемым на первый затвор, а напряжение uг(t) – сигналом гетеродина, подаваемым на второй затвор. Колебательный контур, настроенный на разностную частоту, подключен к стоку транзистора. Достоинством этой схемы является незначительная емкостная связь между цепью подачи преобразуемого сигнала и контуром сигнала гетеродина. При наличии такой связи возможен захват сигналом частоты колебаний гетеродина. При этом частота сигнала гетеродина становится равной частоте преобразуемого сигнала, вследствие чего преобразования частоты происходить не будет.
Преобразование частоты можно осуществить также с помощью параметрических цепей. В таких цепях напряжение гетеродина подается на нелинейную
studfile.net