Как работает частотный преобразователь для однофазного двигателя. Каковы преимущества использования частотника. Как подобрать и подключить частотный преобразователь к однофазному электродвигателю. Можно ли сделать частотник своими руками.
Принцип работы частотного преобразователя для однофазного электродвигателя
Частотный преобразователь (частотник) для однофазного электродвигателя — это устройство, которое преобразует однофазное напряжение сети в трехфазное напряжение с регулируемой частотой для питания и управления скоростью однофазного асинхронного двигателя.
Принцип работы частотника для однофазного двигателя заключается в следующем:
- Входное однофазное напряжение 220В выпрямляется и преобразуется в постоянное напряжение.
- С помощью инвертора постоянное напряжение преобразуется в трехфазное переменное с регулируемой частотой и амплитудой.
- Полученное трехфазное напряжение подается на обмотки однофазного двигателя, создавая вращающееся магнитное поле.
- За счет изменения частоты выходного напряжения регулируется скорость вращения ротора двигателя.
Преимущества использования частотного преобразователя с однофазным двигателем
Применение частотного преобразователя для управления однофазным электродвигателем дает следующие преимущества:

- Плавная регулировка скорости вращения двигателя в широком диапазоне
- Экономия электроэнергии до 30-50% за счет оптимизации режимов работы
- Плавный пуск и торможение двигателя, снижение пусковых токов
- Защита двигателя от перегрузок и аварийных режимов
- Возможность удаленного управления и автоматизации
- Продление срока службы двигателя и механизмов
Как подобрать частотный преобразователь для однофазного электродвигателя
При выборе частотного преобразователя для однофазного двигателя необходимо учитывать следующие параметры:
- Мощность двигателя — частотник должен быть рассчитан на мощность, равную или немного превышающую мощность двигателя.
- Номинальный ток двигателя — выходной ток частотника должен быть не меньше номинального тока двигателя.
- Напряжение питания — для однофазной сети 220В.
- Диапазон регулирования частоты — обычно 0-400 Гц.
- Необходимые функции управления и защиты.
Рекомендуется выбирать частотный преобразователь с запасом по мощности 20-30% от номинальной мощности двигателя.

Схема подключения частотного преобразователя к однофазному электродвигателю
Типовая схема подключения частотника к однофазному асинхронному двигателю выглядит следующим образом:
- Входные клеммы L и N частотника подключаются к однофазной сети 220В.
- Выходные клеммы U, V, W частотника соединяются с обмотками двигателя.
- Клемма заземления частотника соединяется с контуром заземления.
- При необходимости подключаются цепи управления (кнопки, переключатели).
Важно соблюдать правила электробезопасности и рекомендации производителя при монтаже и подключении оборудования.
Настройка параметров частотного преобразователя
Для корректной работы с однофазным двигателем необходимо выполнить настройку следующих основных параметров частотного преобразователя:
- Номинальная частота двигателя (обычно 50 Гц)
- Номинальное напряжение двигателя
- Номинальный ток двигателя
- Номинальная скорость вращения
- Минимальная и максимальная рабочая частота
- Время разгона и торможения
- Режим управления (скалярный или векторный)
Точные значения параметров необходимо устанавливать в соответствии с характеристиками конкретного двигателя и требованиями технологического процесса.

Можно ли сделать частотный преобразователь для однофазного двигателя своими руками
В принципе, возможно изготовить простой частотный преобразователь для однофазного двигателя своими руками. Однако это довольно сложная задача, требующая глубоких знаний в электронике и программировании. Основные этапы самостоятельного изготовления частотника:
- Разработка принципиальной схемы силовой и управляющей части
- Подбор электронных компонентов (микроконтроллер, силовые ключи, драйверы и т.д.)
- Изготовление печатной платы
- Программирование микроконтроллера
- Сборка, наладка и тестирование устройства
Для большинства применений целесообразнее и надежнее использовать готовые промышленные частотные преобразователи, которые обеспечивают необходимый функционал и безопасность.
Типичные проблемы при работе частотника с однофазным двигателем
При эксплуатации частотного преобразователя с однофазным электродвигателем могут возникать следующие проблемы:
- Перегрев двигателя на низких оборотах из-за недостаточного охлаждения
- Повышенный шум и вибрация на определенных частотах
- Нестабильная работа на малых оборотах
- Ложные срабатывания защит преобразователя
Для устранения этих проблем необходимо правильно настроить параметры частотника, использовать двигатели, предназначенные для работы с преобразователем частоты, обеспечить дополнительное охлаждение при необходимости.

Заключение
Применение частотного преобразователя позволяет эффективно управлять скоростью однофазного асинхронного электродвигателя, экономить электроэнергию и продлевать срок службы оборудования. При правильном подборе, подключении и настройке частотный привод обеспечивает надежную и экономичную работу электропривода в различных областях применения.
Частотный преобразователь для однофазного электродвигателя своими руками
Частотник для однофазного электродвигателя IDS Drive серии S1 предназначен для регулировки скорости электродвигателя с однофазным входом V. Частотник для однофазного электродвигателя имеет набор функций общепромышленных преобразователей с трёхфазным выходом. На низких частотах крутящий момент однофазных двигателей меньше номинального значения, поэтому однофазный частотник эффективно управляет выходной частотой в диапазоне Гц. Если требуется частотный преобразователь для однофазного двигателя 22oв , то частотник IDS Drive серии S1 — это то, что вам нужно. Чаще всего частотник для однофазного двигателя нужен в случае, когда у потребителя уже есть однофазный двигатель или насос работающий от однофазной сети B и требуется изменить скорость его работы.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.

По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Please turn JavaScript on and reload the page.
- Регулятор оборотов асинхронного электродвигателя 220в своими руками
- Частотные преобразователи для однофазного двигателя IDS Drive S1
- Регулятор оборотов асинхронного двигателя 220в своими руками
- Регулирование однофазного асинхронного двигателя с помощью частотного преобразователя
- Частотный преобразователь для электродвигателя и принцип работы
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Частотный преобразователь 220 — 380 сделаный своими руками
Please turn JavaScript on and reload the page.
Для стабилизации электрического тока используются различные устройства. Предлагаем рассмотреть, что такое электромашинный преобразователь частоты, как работает высоковольтный, тиристорный и однофазный прибор, его назначение, где можно купить, а также схема, как его сделать своими руками.
Простейший преобразователь напряжения тока или частоты ПЧ — это электромагнитный, электронный или электромеханический прибор, который преобразует переменный ток одной частоты в переменный ток другой.
Преобразователь напряжение-частота широко используется для того, чтобы сохранить энергию механических систем, к примеру, двигателя, насоса, вентилятора и т. Выбираются приборы в соответствии с кривыми двигателя для обеспечения оптимальной скорости и нагрузки, транзисторный преобразователь может помочь сэкономить энергию двигателя, снижая потери энергии и увеличивая КПД.
В основном используется первый тип электропривода, так как он обеспечивает двойное преобразование частоты вращения двигателя, при этом контролируется как вход сигнала, так и выход. Рассмотрим подробнее их принцип действия. Преобразователь частоты для асинхронных двигателей работает путем преобразования входного синусоидального напряжения переменного тока в напряжение постоянного тока, а затем его изменения обратно в переменное напряжение.
Это преобразование происходит с помощью либо кремниевых выпрямителей или IGBT-транзисторов. Напряжение постоянного тока включается с помощью транзисторов для создания постоянного выходного напряжения переменного тока так называемый инвертор. Транзисторы могут включать и выключать питание, чтобы создать нужное напряжение сигнала тока, который обеспечивает питание двигателя.
Статический трехфазный ПЧ имеет шесть диодов в качестве мостового выпрямителя переднего плана, которые преобразуют переменный ток в постоянный. Обеспечивает пуск в течение 2 секунд от включения, дорогой, в последнее время теряет свою актуальность. Этот ПЧ выполнен коммутацией естественного типа, оснащен отдельным источником напряжения с повышенной частотой. У него достаточно узкий круг использования, в основном это городские или квартальные электростанции. В зависимости от области использования, нужно выбрать оптимальный преобразователь, иначе Вы не только переплатите за устройство, но и можете подвергнуть опасности жизни своих близких и работников.
Обязательно перед покупкой должна быть прочитана документация, проверена мощность и пропускные способности. Настройка и сборка преобразователей может производиться продавцом-консультантом непосредственно на месте покупки. Предлагаем рассмотреть, как можно самому собрать и подключить простой самодельный инверторный преобразователь частоты для небольшого трехфазного электродвигателя в виде подробной инструкции.
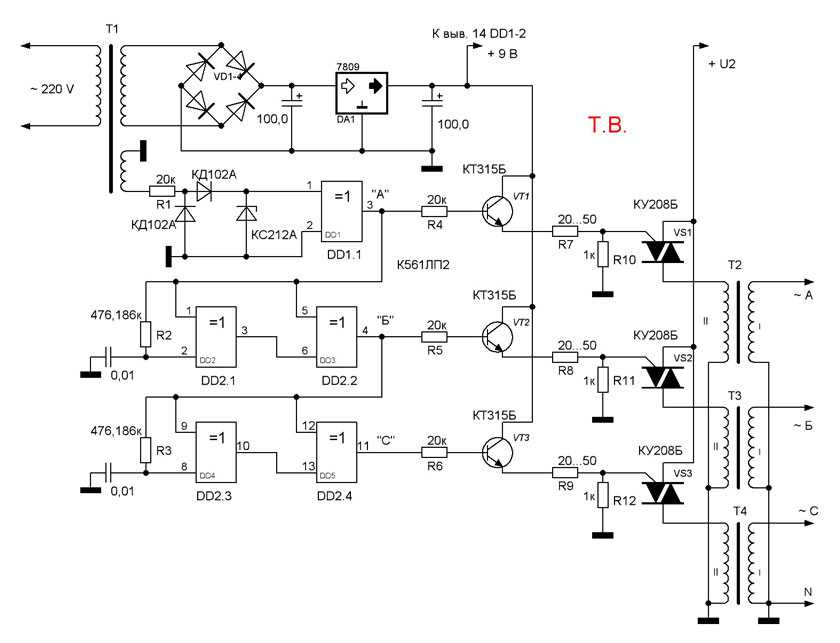
Обмотки соединены в звезду, благодаря чему средняя точка каждой выведена наружу, это позволяет существенно упростить микросхему: нужно три выходных сигнала, и один выходной ключ на каждую из фаз.
Электрическая схема подключения показана на фото ниже:. Данное устройство состоит из таких компонентов: генератор, формирующий импульсы, ключи на составных транзисторах и электрического двигателя.
Руководство, по которому можно подключить преобразователь частоты двигателя, имеет вид упрощенной схемы. На чертеже изображен двигатель, который управляется несколькими ключами.
Механические контакты показаны как элементы полупроводникового типа. Питается двигатель при помощи постоянного напряжения. Для осуществления такой технологии используются специальные контроллеры, образующие мертвую зону.
Временной интервал для мертвой зоны нужно рассчитать таким образом, чтобы гарантировать успешное закрытие всех транзисторов верхнего ряда, только тогда вероятность образования сквозных токов будет сведена к минимуму. Ключами с гальванической связью управляет драйвер на составном резисторе, для этого часто устанавливают дополнительный оптрон для каждого ключа или канала как и показано на схеме , эта деталь на данном чертеже выполняет роль еще одного инвертора.
Ключами с гальванической связью управляет драйвер на составном резисторе, для этого часто устанавливают дополнительный оптрон для каждого ключа или канала как и показано на схеме , эта деталь на данном чертеже выполняет роль еще одного инвертора.
Чтобы питать каждый драйвер, нужно использовать специальный выпрямитель, который в свою очередь, запитан от обмотки привода. Возможно, это является одним из недостатков схемы. Для управления длительности мертвой зоны данный преобразователь напряжения и частоты использует конденсатор. Этот прибор относится к типу универсал, его можно подсоединять к любым двигателям, мощность которые не превышает 10 кВт.
Если ПЧ не работает на полную мощность, то рекомендуем проверить тормозной резистор для преобразователя частоты, в таблице ниже даны оптимальные показатели. В том случае, если данные Вашей детали не совпадают с ними, то необходима замена резистора:. Система может дать сбой, если Вы выбрали очень мощный ПЧ для слабой сети. Дело в том, что большинство деталей преобразователя предназначено для постоянного напряженного состояния, если уровень сигнала не доходит до минимальных показателей ПЧ, то он не будет работать.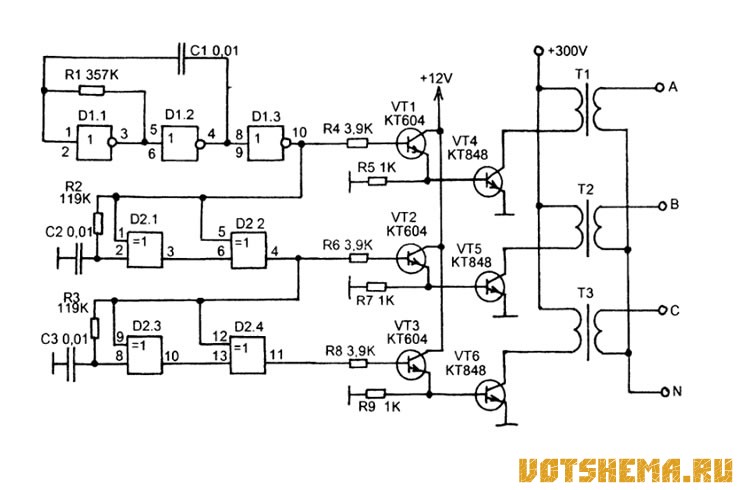
Как тормозной резистор влияет на мощность? Понравилась статья? Поделиться с друзьями:. Вам также может быть интересно. Комментарии и отзывы Комментарии: 1. Добавить комментарий Отменить ответ. Политика конфиденциальности Пользовательское соглашение О нас.
Регулятор оборотов асинхронного электродвигателя 220в своими руками
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные. В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность. Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток. Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:.
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:.
Я изготовил преобразователь частоты и асинхронный привод для моего.
Частотные преобразователи для однофазного двигателя IDS Drive S1
Впервые мир познакомился с таким устройством, как трехфазный асинхронный электродвигатель , еще в конце 19 столетия. И начиная с того времени, его стали применять на каждом промышленном предприятии, где он стал обязательным элементом. Во время эксплуатации электродвигателя важно обеспечить его плавный пуск и остановку. Это можно сделать только при наличии специального устройства — преобразователя частоты. В первую очередь, целесообразно оснащать преобразователем крупные электродвигатели, обладающие высокими показателями мощности. Польза от наличия такого устройства заключается в возможности менять пусковые токи, задавая необходимую их величину.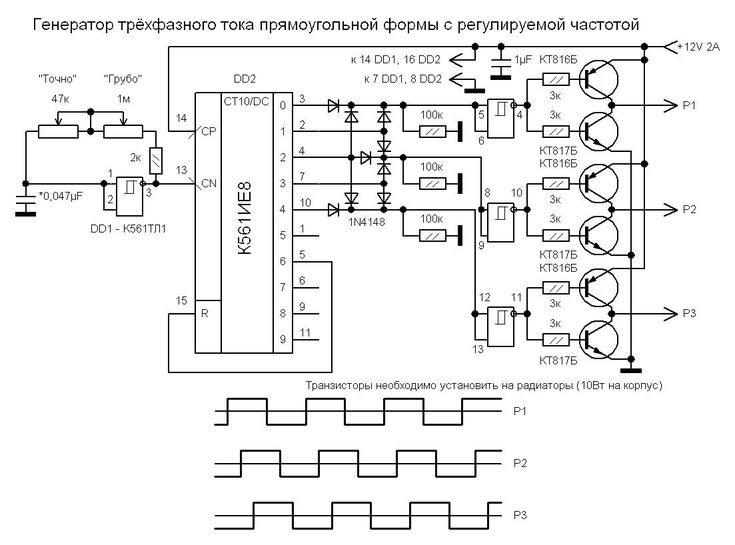 Конечно, можно регулировать пусковой ток и вручную, однако в этом случае будет тратиться определенное количество энергии впустую, что негативным образом скажется на эксплуатационном ресурсе электродвигателя. Наблюдаемый в устройствах, не имеющих подобного приспособления, ток имеет величину, превышающую в раз номинальное напряжение. В таких условиях невозможно создать нормальные условия для работы оборудования. Действие такого устройства, как преобразователь частоты, основывается на использовании электронного механизма , который контролирует работу двигателя.
Конечно, можно регулировать пусковой ток и вручную, однако в этом случае будет тратиться определенное количество энергии впустую, что негативным образом скажется на эксплуатационном ресурсе электродвигателя. Наблюдаемый в устройствах, не имеющих подобного приспособления, ток имеет величину, превышающую в раз номинальное напряжение. В таких условиях невозможно создать нормальные условия для работы оборудования. Действие такого устройства, как преобразователь частоты, основывается на использовании электронного механизма , который контролирует работу двигателя.
Регулятор оборотов асинхронного двигателя 220в своими руками
Используется повсеместно. Основное предназначение — преобразование электричества в механическую силу. Электродвигатель — своего рода противоположность генератора. Учитывая особенность того, что рассматриваемый механизм работает от электричества, особые требования предъявляются к показателям электроэнергии.
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности.
Трехфазное питание используется, в основном, в промышленности.
Регулирование однофазного асинхронного двигателя с помощью частотного преобразователя
Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу. Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Частотный преобразователь для электродвигателя и принцип работы
У вас имеется однофазный насос, на котором требуется регулировать скорость? Решением этой задачи является частотный преобразователь для однофазного насоса электродвигателя. Помимо регулировки скорости немаловыжным является возможность настройки времени выхода насоса на номинальную скорость. Эта функция продлит жизнь насосу а также позволит избежать гидроудара возникающего при прямом подключении насоса в сеть без частотного преобразователя. Однофазный преобразователь частоты IDS Drive S1 предназначен для управления однофазными асинхронными и конденсаторными двигателями переменного тока в диапазоне мощностей от 0,4 до 2,2 кВт.
Помимо регулировки скорости немаловыжным является возможность настройки времени выхода насоса на номинальную скорость. Эта функция продлит жизнь насосу а также позволит избежать гидроудара возникающего при прямом подключении насоса в сеть без частотного преобразователя. Однофазный преобразователь частоты IDS Drive S1 предназначен для управления однофазными асинхронными и конденсаторными двигателями переменного тока в диапазоне мощностей от 0,4 до 2,2 кВт.
Как сделать частотный преобразователь своими руками: как работает руками частотный преобразователь для однофазного электродвигателя.
Прежде чем изготовлять частотный преобразователь своими руками необходимо ознакомиться с его функциями и принципом действия. Он предназначен для преобразования тока переменного типа одной частоты в ток переменного типа другой частоты. Применяется совместно с асинхронными электродвигателями и служит незаменимым устройством для многих типов устройств. Частотный преобразователь представляет собой разновидность механизмов электронного вида, эффективно контролирующих работу электродвигателей.
Полезные советы. Самодельный частотник. Разрабатываем преобразователь вместе. Частотник для трехфазного электродвигателя своими руками схема. Инвертор для электродвигателя.
Для стабилизации электрического тока используются различные устройства.
Частотный асинхронный преобразователь частоты служит для преобразования сетевого трёхфазного или однофазного переменного тока частотой 50 60 Гц в трёхфазный или однофазный ток, частотой от 1 Гц до Гц. Промышленностью выпускаются частотные преобразователи электроиндукционного типа, представляющего собой по конструкции асинхронный двигатель с фазным ротором , работающий в режиме генератора-преобразователя, и преобразователи электронного типа. Частотные преобразователи электронного типа часто применяют для плавного регулирования скорости асинхронного электродвигателя или синхронного двигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. Электронный преобразователь частоты состоит из схем, в состав которых входит тиристор или транзистор , которые работают в режиме электронных ключей. В основе управляющей части находится микропроцессор , который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач контроль, диагностика, защита.
В основе управляющей части находится микропроцессор , который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач контроль, диагностика, защита.
С целью охраны окружающей среды везде вводятся правила, рекомендующие производителям электрооборудования выпускать продукцию, экономно расходующую электроэнергию. Зачастую это достигается эффективным управлением скорости электродвигателя. Частотник для трехфазного электродвигателя или частотный преобразователь имеет множество наименований: инвертор, преобразователь частоты переменного тока, частотно регулируемый привод.
Однофазный частотный преобразователь на Arduino
В статье речь пойдет о создании простого однофазного маломощного частотного преобразователя на базе Arduino.
Предыстория. Как-то давно возникла у меня необходимость регулировать скорость вытяжного (канального) вентилятора. К моему удивлению, задача эта оказалась не совсем простой, как казалось на первый взгляд. Я перепробовал несколько самых очевидных вариантов, но у всех были свои минусы. Первое, что приходит на ум, это диммер на симисторе и всяческие его разновидности, но этот вариант я отмел сразу, т.к. работает он некорректно: двигатель сильно гудит, греется и всем своим видом показывает, что ему это не нравится. Следующий вариант это регулировка (по факту – уменьшение) оборотов вентилятора путем увеличения скольжения двигателя, т.е. уменьшения напряжения. В общем, вариант неплохой (по крайней мере, для вентилятора), но только если нужно небольшое замедление, т.к. при увеличении скольжения опять же растут потери и нагрев двигателя. Еще одним недостатком данного варианта является сложность изменения переменного напряжения, это можно делать дискретно, включая последовательно с двигателем различную нагрузку: активную (лампочка, мощный резистор), реактивную (дроссель, конденсатор), как раз вариант с конденсатором проработал у меня в вытяжке довольно долго.
К моему удивлению, задача эта оказалась не совсем простой, как казалось на первый взгляд. Я перепробовал несколько самых очевидных вариантов, но у всех были свои минусы. Первое, что приходит на ум, это диммер на симисторе и всяческие его разновидности, но этот вариант я отмел сразу, т.к. работает он некорректно: двигатель сильно гудит, греется и всем своим видом показывает, что ему это не нравится. Следующий вариант это регулировка (по факту – уменьшение) оборотов вентилятора путем увеличения скольжения двигателя, т.е. уменьшения напряжения. В общем, вариант неплохой (по крайней мере, для вентилятора), но только если нужно небольшое замедление, т.к. при увеличении скольжения опять же растут потери и нагрев двигателя. Еще одним недостатком данного варианта является сложность изменения переменного напряжения, это можно делать дискретно, включая последовательно с двигателем различную нагрузку: активную (лампочка, мощный резистор), реактивную (дроссель, конденсатор), как раз вариант с конденсатором проработал у меня в вытяжке довольно долго. Если же нужно менять напряжение постепенно, то самым простым и доступным вариантом является ЛАТР, его же основной недостаток – это размеры и вес, как-то не очень, когда регулятор в несколько раз больше и тяжелее регулируемого устройства. Ну и, наконец, последний, самый правильный вариант – это, конечно, частотный преобразователь, далее о нем.
Если же нужно менять напряжение постепенно, то самым простым и доступным вариантом является ЛАТР, его же основной недостаток – это размеры и вес, как-то не очень, когда регулятор в несколько раз больше и тяжелее регулируемого устройства. Ну и, наконец, последний, самый правильный вариант – это, конечно, частотный преобразователь, далее о нем.
Поискав в сети и не найдя ничего подходящего (т.к. в основном все частотники трехфазные и выдают более киловатта мощности), я принял решение собирать свое.
Вкратце об общих принципах
За основу была взята плата Arduino (nano), как самый простой вариант для начала, до этого программированием каких-либо МК я не занимался. Задача ее формировать два шим сигнала, нарезающих синус, для положительной и отрицательной полуволн поочередно (Униполярная модуляция, если не ошибаюсь). Выглядеть это должно примерно так:
Силовая часть – это полный мост на четырех транзисторах, управляемых двумя драйверами IR2110, выход с которых фильтруется LC фильтром, также есть защита по току, реализованная на датчике тока и компараторе (ОУ tl072cp, был под рукой), порог срабатывания настраивается. Блок питания логики и драйверов изобретать не стал, просто оставил место на плате для отдельной платы бп, например такой:
Блок питания логики и драйверов изобретать не стал, просто оставил место на плате для отдельной платы бп, например такой:
(в рабочем варианте поставил плату от сетевого адаптера на 13в т.к. когда собирал китайцы БП еще не прислали). Выходное напряжение блока питания в идеале 13-15в, можно и 12, если ключи не особо мощные. Для питания ардуинки и дисплея на плате есть стабилизатор на 5 вольт (lm7805).
Теперь немного подробней, начнем с программной части. При написании прошивки очень помог сайт Алекса Гайвера, за что ему огромное спасибо!
Для начала с помощью библиотеки формируется ШИМ сигнал (частота около 8кГц) на 9 и 10 ногах, для положительной и отрицательной полуволны соответственно. Далее для создания синусоиды используется массив из 100 значений в диапазоне от 0 до 2000 (диапазон скважности для данного варианта ШИМа).
В основном цикле программы по значениям из этого массива меняется скважность поочередно для положительной и отрицательной полуволны (сначала для 9 потом для 10 пина). Частота синуса устанавливается через период для каждого значения из таблицы, например, для 50 гц расчет будет следующий: частота 50гц, соответственно, период одного полного колебания 0,02с или 20000 микросекунд (именно в них задается интервал), за это время должно получиться две полуволны, т.е. 200 значений скважности (сначала 100 для 9го пина потом еще раз для 10го), отсюда время на одно значение скважности будет рассчитываться как 20000мкс/200=100мкс, для 25гц соответственно 40000/200=200мкс. У меня диапазон регулируется от 81мкс до 178мкс на одно значение из массива, что соответствует значениям частоты от 53 до 26 герц примерно. Что соответствует регулировке скорости от 106% до 26%. Быстрей эти движки крутиться не способны, а медленней для вентилятора не нужно, да и к тому же это уже чрезмерное насилие, не рассчитаны они на такое.
Частота синуса устанавливается через период для каждого значения из таблицы, например, для 50 гц расчет будет следующий: частота 50гц, соответственно, период одного полного колебания 0,02с или 20000 микросекунд (именно в них задается интервал), за это время должно получиться две полуволны, т.е. 200 значений скважности (сначала 100 для 9го пина потом еще раз для 10го), отсюда время на одно значение скважности будет рассчитываться как 20000мкс/200=100мкс, для 25гц соответственно 40000/200=200мкс. У меня диапазон регулируется от 81мкс до 178мкс на одно значение из массива, что соответствует значениям частоты от 53 до 26 герц примерно. Что соответствует регулировке скорости от 106% до 26%. Быстрей эти движки крутиться не способны, а медленней для вентилятора не нужно, да и к тому же это уже чрезмерное насилие, не рассчитаны они на такое.
Итак, частота регулируется, но в частотнике также пропорционально частоте понижается и напряжение (скалярное управление, о векторном я даже не думал, и трудно, и не нужно). Это реализовано следующим образом: (скважность/32)*коэффициент (PotMapSkvaz) , который принимает значения от 30 до 16 в итоге результирующее значение скважности получается в диапазоне от 94% до 50% от того, которое было считано из таблицы, соответственно, и напряжение понижается на столько же (забегая немного вперед: ровного синуса не получилось за счет чего напряжение на выходе немного завышено, поэтому максимальная скважность не 100% а 94%).
Это реализовано следующим образом: (скважность/32)*коэффициент (PotMapSkvaz) , который принимает значения от 30 до 16 в итоге результирующее значение скважности получается в диапазоне от 94% до 50% от того, которое было считано из таблицы, соответственно, и напряжение понижается на столько же (забегая немного вперед: ровного синуса не получилось за счет чего напряжение на выходе немного завышено, поэтому максимальная скважность не 100% а 94%).
В общем, цикл выглядит так: обнуляем оба значения скважности (от греха, но больше от сквозняков), рисуем первую полуволну синуса, проходя по массиву на каждом значении, задерживаясь в течение установленного времени, опять обнуляем значения скважностей и повторяем все для второй полуволны (отрицательного полупериода). По сути, ШИМ на обоих пинах работает постоянно, меняется только скважность, но, когда она равна нулю, фактически на пине нет никаких импульсов.
Далее про управление и индикацию: с энкодером проблем не было, он работает на прерываниях и много ресурсов не тратит, при повороте он уменьшает и увеличивает, соответственно, частоту до установленных пределов (53-25Гц), при нажатии на кнопку устанавливает частоту в дефолт (~50Гц).
Дисплей. С ним пришлось немного повозиться, т.к. при работе в цикле он оказывает влияние на быстродействие программы и, соответственно, на частоту, что никуда не годится, поэтому решено было присовокупить это действо к моментам изменения частоты, т.е. информация на дисплее обновляется только в моменты поворота энкодера, что немного замедляет программу, но, т.к. это происходит не постоянно, то ничего страшного в этом я не вижу. Также была прикручена запись переменной энкодера в постоянную память, что позволяет сохранить настройки частоты при отключении устройства от питания, происходит это тоже только лишь в моменты изменения оной.
По софту все, далее про железо. Схема:
Как было сказано выше, основа схемы – это мост из 4 транзисторов (FQPF6N90C), управляемых двумя драйверами IR2110. Вход верхнего плеча одного драйвера соединен со входом нижнего плеча второго и наоборот. Питание схемы осуществляется отдельным импульсным БП на 13 вольт, ардуинка и дисплей питаются от 5 вольт через стабилизатор LM7805.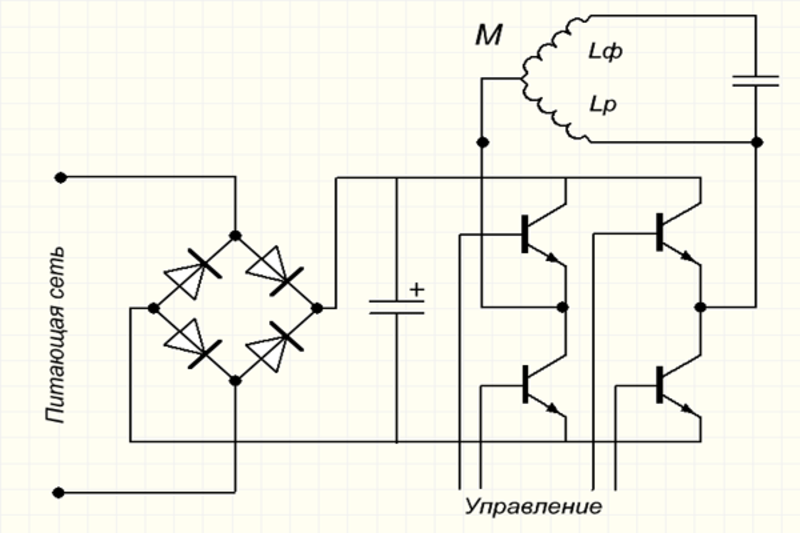
Энкодер в виде стандартного модуля для ардуино был немного переделан, изначально в нем стояли подтягивающие резисторы на 10к, что оказалось слишком много: наблюдались самопроизвольные срабатывания от наведенных помех, поэтому резисторы были заменены на 2к и добавлены конденсаторы по 0.47 мкФ, после этого ложных срабатываний больше не наблюдалось.
Также в схеме присутствует защита по току, реализованная на компараторе, на операционном усилителе tl072cp (из тех, что были под рукой) и датчике тока (R21 10 ом). В среднем положении подстроечного резистора R20 защита срабатывает примерно при токе в пол ампера, что соответствует нагрузке около 100 ватт (мощность стандартного канального вентилятора около 15-25 ватт), мощность моего по паспорту 16ватт. При превышении установленного тока и срабатывании компаратора высокий уровень сигнала подается на 11 ноги обоих драйверов (вход SD), что, соответственно, приводит к исчезновению сигналов на выходе и остановке генерации.
Далее про выходную часть. После транзисторов идет LC фильтр, состоящий из индуктивности, в моем случае – 2,78 мГн и конденсатора в 0,47 мкФ. Об индуктивности стоит сказать отдельно: катушка намотана на сердечнике из материала МП-140, типоразмера П19х11х6.7, из двух половинок, витки не считал, мотал около трех метров эмалированным проводом d0.4мм.
После транзисторов идет LC фильтр, состоящий из индуктивности, в моем случае – 2,78 мГн и конденсатора в 0,47 мкФ. Об индуктивности стоит сказать отдельно: катушка намотана на сердечнике из материала МП-140, типоразмера П19х11х6.7, из двух половинок, витки не считал, мотал около трех метров эмалированным проводом d0.4мм.
Ну и по итогу о результатах. Печатная плата:
Финальная реализация готового устройства:
(Все фото кроме последнего сделаны с RC фильтром, который в итоге был заменен на LC, остальное без изменений)
Платы были заказаны у китайцев, после сборки и экспериментов на тестовой:
Форма выходного сигнала:
Ровного синуса на выходе не получилось, то, что получилось, видно на примерах осциллограмм, почему так, я до конца не понял, грешу на выходной фильтр, возможно нужна катушка большей индуктивности, если кто подскажет, куда копать, буду очень благодарен. Однако, несмотря на неровности выходного сигнала, двигатель вентилятора работает на нем прекрасно, без гула и перегрева.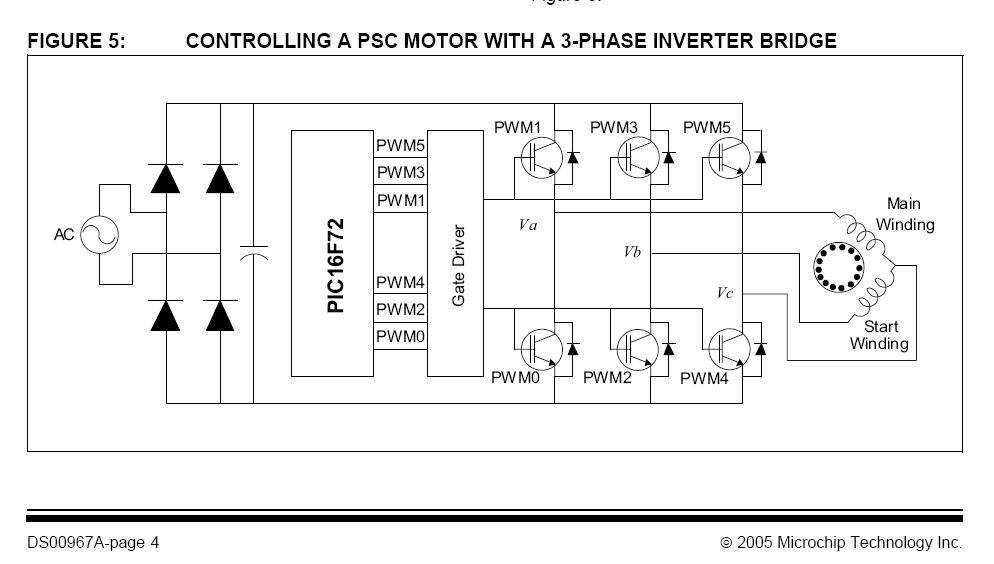 Нагрев присутствует, но в пределах нормы, такой, как при питании от сети, ну или, немного больше, но, в общем, абсолютно не критично.
Нагрев присутствует, но в пределах нормы, такой, как при питании от сети, ну или, немного больше, но, в общем, абсолютно не критично.
Как видно по фото, транзисторы установлены на радиатор (из алюминиевого уголка 40*40*3), также имеется принудительная вентиляция. Так вот, при первоначальных тестах в качестве фильтра был вариант RC пары (Резистор 100 Ом и конденсатор 0.47 мкФ), при таком варианте грелся достаточно неплохо резистор и немного радиатор с ключами, поэтому вентилятор и был прикручен. Однако с дросселем ситуация изменилась в корне: нагрев транзисторов фактически отсутствует, дроссель, может, на пару тройку градусов теплее температуры окружающего воздуха, но вентилятор убирать уже не стал, просто притормозил его резистором, чтоб не шумел, так он вроде никому не мешает.
На этом все. С удовольствием отвечу на вопросы, надеюсь, кому то мой опыт будет полезен.
P.S.: Про существование платы EGS002 я в курсе, к сожалению, про нее я узнал только ближе к концу моего приключения, и останавливаться было уже поздно)). Может, позже попробую что-нибудь и на ней собрать, но это будет уже совсем другая история.
Может, позже попробую что-нибудь и на ней собрать, но это будет уже совсем другая история.
Теги:
- Arduino
- Eagle
Можно ли использовать частотно-регулируемый привод (VFD) на однофазном двигателе?
Не рекомендуется использовать один двигатель с частотно-регулируемым приводом. Хотя это технически возможно, недостатки намного перевешивают любые преимущества, которые вы могли бы ожидать. В большинстве случаев дешевле перейти на 3-фазный двигатель для использования с ЧРП.
Блог по теме: часто задаваемые вопросы о частотно-регулируемом приводе (VFD)
Как работает частотно-регулируемый привод
ЧРП позволяют контролировать производительность системы, контролируя скорость двигателей или насосов и регулируя ток по требованию. ЧРП принимает трехфазный вход переменного тока, а затем выдает желаемый переменный или постоянный ток. Это позволяет двигателям эффективно работать при колебаниях нагрузки.
ЧРП принимает трехфазный вход переменного тока, а затем выдает желаемый переменный или постоянный ток. Это позволяет двигателям эффективно работать при колебаниях нагрузки.
Преимущества ЧРП для системы
Управление скоростью двигателя дает множество преимуществ. Во-первых, частотно-регулируемый привод обеспечивает большую эффективность как в отношении использования мощности, так и скорости передачи в насосе или двигателе. ЧРП определяет нагрузку на систему и подает питание для компенсации. Он также решает такие проблемы, как системные сбои и перегрузки. Это автоматическое интеллектуальное управление может продлить срок службы двигателя, предотвратить отказ системы и повысить производительность.
Проблемы с использованием однофазного двигателя
Однофазные двигатели намотаны иначе, чем трехфазные. Чтобы использовать однофазный двигатель с ЧРП, двигатель должен быть инверторного класса, что означает оплату перемотки существующего двигателя или покупку нового двигателя. Даже если технические характеристики двигателя соблюдены, могут возникнуть проблемы с работой однофазного двигателя. Это чаще всего наблюдается на низких скоростях, когда двигатель вынужден работать на более низких оборотах.
Даже если технические характеристики двигателя соблюдены, могут возникнуть проблемы с работой однофазного двигателя. Это чаще всего наблюдается на низких скоростях, когда двигатель вынужден работать на более низких оборотах.
Преимущества модернизации двигателя
Модификация однофазного двигателя для работы с ЧРП нерентабельна. Вместо того, чтобы тратить ресурсы на внесение необходимых изменений, обычно лучше перейти на трехфазный двигатель. Трехфазные двигатели не только дешевле, но и меньше по размеру и легче. Модернизация означает более длительный срок службы системы, улучшенный контроль выходной мощности и обеспечит дополнительные преимущества, такие как снижение рабочих температур.
Уже более 30 лет компания Mader Electric обеспечивает установку, обучение и техническое обслуживание насосных систем мощностью до 4000 л.с. Помимо того, что мы являемся ведущей компанией по производству насосов и двигателей в районе Сарасоты, мы также располагаем ультрасовременным учебным центром, чтобы помочь нашим клиентам освоиться, как только установка будет завершена. Чтобы узнать больше о наших услугах в области частотно-регулируемых приводов, свяжитесь с нами сегодня.
Чтобы узнать больше о наших услугах в области частотно-регулируемых приводов, свяжитесь с нами сегодня.
Темы: эксперт по двигателям и системам управления, эксперт по двигателям и системам управления, эксперт по двигателям и управлению Сарасота, мотор, насосные двигатели
VFD — Learnchannel-TV.com
Управление двигателем с помощью частотно-регулируемого привода или частотно-регулируемого привода
Параметризация ЧРП
Управление V/f (векторное управление)
87-Гц-работа с ЧРП:
В этом видеоролике описывается работа ЧРП или частотно-регулируемого привода . Другие названия для этого: преобразователь частоты , преобразователь привода переменного тока и т. д. Из содержания:
Другие названия для этого: преобразователь частоты , преобразователь привода переменного тока и т. д. Из содержания:
Блок-схема основных компонентов и их функции
Построение выходного сигнала с помощью Широтно-импульсная модуляция ШИМ
Построение 3-фазного сигнала
Управление крутящим моментом и скоростью Преобразователь переменного тока
Преобразователь частоты позволяет бесступенчато регулировать скорость и крутящий момент как синхронных, так и асинхронных двигателей.
Принцип работы преобразователя частоты прост: сначала необходимо выпрямить переменное напряжение местного источника питания, а затем сгладить пульсации постоянного напряжения. После этого вы можете преобразовать это постоянное напряжение в переменное напряжение желаемой частоты и уровня:
Структура частотно-регулируемого привода
Выпрямитель
Преобразователи частоты меньшего размера для меньшей мощности также могут питаться от однофазного переменного напряжения.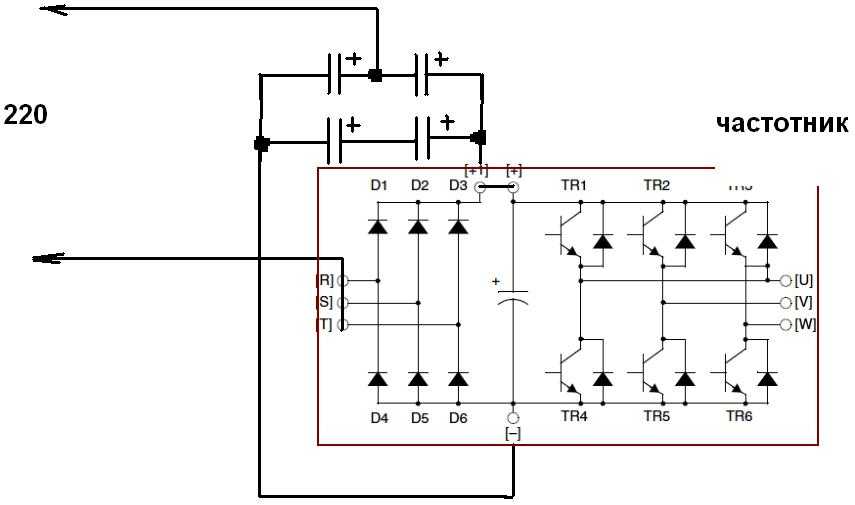 Выпрямляется мостовой схемой. Если энергия торможения двигателя должна быть возвращена в источник питания (ключевое слово: рекуперативное торможение), здесь используется полностью управляемый мостовой выпрямитель B6C.
Выпрямляется мостовой схемой. Если энергия торможения двигателя должна быть возвращена в источник питания (ключевое слово: рекуперативное торможение), здесь используется полностью управляемый мостовой выпрямитель B6C.
Сглаживание
Пульсации постоянного напряжения сглаживаются в звене постоянного тока с помощью буферного конденсатора, а катушка индуктивности подавляет сильные колебания тока.
Тормозной прерыватель
Этот модуль является дополнительным и служит для рассеивания энергии торможения подключенного двигателя через резистор.
Инвертор
Кроме того, уже сглаженное напряжение из звена постоянного тока преобразуется в трехфазное напряжение инвертором постоянного/переменного тока. Сегодня для этой функции используется все больше и больше IGBT.
ИНСТРУКЦИИ ПО ТЕХНИЧЕСКОМУ ОБСЛУЖИВАНИЮ И ОБСЛУЖИВАНИЮ
Из-за наличия конденсаторов в звене постоянного тока после выключения частотно-регулируемого привода сохраняется высокое напряжение. Квалифицированный персонал должен подождать не менее десяти минут, прежде чем открывать это устройство и проверять, разряжен ли ЧРП.
Квалифицированный персонал должен подождать не менее десяти минут, прежде чем открывать это устройство и проверять, разряжен ли ЧРП.
P параметризация ЧРП
V/f-управление (векторное управление)
требования к динамическим приводам (таким как ременные передачи, насосы, вентиляторы).
Предназначен для поддержания постоянного крутящего момента двигателя. Это достигается с помощью параметра , называемого « Ramp «: С увеличением частоты полное сопротивление обмотки двигателя также увеличивается. В результате ток двигателя уменьшится и, следовательно, магнитный поток Φ уменьшится, что приведет к меньшему крутящему моменту. Чтобы противодействовать этому, напряжение статора увеличивается пропорционально частоте.
Параметр » Boost » предназначен для компенсации омического сопротивления обмотки двигателя, особенно на низких частотах, а также для преодоления статического трения:
Для получения более высоких скоростей с постоянным крутящим моментом можно использовать характеристику 87 Гц.