Что такое планарные микросхемы. Как выполняется пайка планарных микросхем. Где применяются планарные микросхемы. Какие преимущества у планарных микросхем. Как выбрать специалиста для пайки планарных микросхем.
Что представляют собой планарные микросхемы
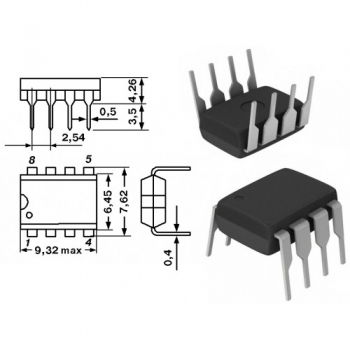
Планарные микросхемы — это электронные компоненты, в которых все элементы и соединения между ними расположены в одной плоскости. Их основные особенности:
- Компактные размеры
- Высокая плотность компоновки элементов
- Изготавливаются методом фотолитографии
- Могут содержать тысячи транзисторов, резисторов и других элементов
- Применяются в большинстве современных электронных устройств
Планарная технология позволяет создавать сложные интегральные схемы на единой полупроводниковой подложке. Это обеспечивает миниатюризацию электроники и повышение ее производительности.
Технология пайки планарных микросхем
Пайка планарных микросхем требует особой точности и аккуратности. Основные этапы процесса:
- Нанесение паяльной пасты на контактные площадки платы
- Точное позиционирование микросхемы
- Нагрев до температуры плавления припоя (обычно 220-260°C)
- Оплавление припоя для формирования надежных соединений
- Постепенное охлаждение для кристаллизации припоя
Для пайки используется специальное оборудование — паяльные станции с контролем температуры, устройства позиционирования, термовоздушные паяльники и др. Важно соблюдать температурный профиль пайки, рекомендованный производителем микросхемы.
Области применения планарных микросхем
Планарные микросхемы широко используются в различных отраслях электроники:
- Компьютерная техника (процессоры, память, контроллеры)
- Мобильные устройства (смартфоны, планшеты)
- Бытовая электроника (телевизоры, аудиосистемы)
- Автомобильная электроника (системы управления двигателем, навигация)
- Медицинское оборудование
- Промышленная автоматика
- Телекоммуникационное оборудование
Практически любое современное электронное устройство содержит планарные микросхемы в качестве ключевых компонентов. Они обеспечивают компактность, высокую функциональность и надежность техники.

Преимущества планарных микросхем
Планарная технология имеет ряд важных преимуществ:
- Высокая степень интеграции элементов
- Малые размеры и вес
- Низкое энергопотребление
- Высокое быстродействие
- Хорошая воспроизводимость параметров
- Надежность и долговечность
- Возможность массового производства
- Низкая стоимость при крупносерийном выпуске
Благодаря этим преимуществам планарные микросхемы вытеснили дискретные компоненты во многих областях электроники. Они позволяют создавать все более миниатюрные и функциональные устройства.
Как выбрать специалиста для пайки планарных микросхем
При выборе специалиста для пайки планарных микросхем следует обратить внимание на следующие факторы:
- Опыт работы с планарными компонентами
- Наличие специализированного оборудования
- Знание современных технологий пайки
- Умение работать с мелкими компонентами
- Аккуратность и внимательность к деталям
- Понимание особенностей различных типов микросхем
- Соблюдение антистатических мер
Рекомендуется обращаться в сервисные центры, специализирующиеся на ремонте электроники. Важно убедиться, что специалист имеет опыт пайки именно планарных микросхем, а не только обычных компонентов.
Особенности монтажа планарных микросхем
При монтаже планарных микросхем необходимо учитывать ряд важных моментов:
- Точное совмещение выводов микросхемы с контактными площадками платы
- Контроль количества наносимой паяльной пасты
- Предотвращение образования шариков припоя и перемычек между выводами
- Использование флюса, не оставляющего остатков
- Защита микросхемы от статического электричества
- Соблюдение температурного режима пайки
- Очистка платы от остатков флюса после пайки
Правильный монтаж обеспечивает надежное соединение микросхемы с платой и ее длительную бесперебойную работу. Ошибки при монтаже могут привести к выходу микросхемы из строя.
Контроль качества пайки планарных микросхем
После пайки планарных микросхем необходимо провести тщательный контроль качества соединений. Основные методы контроля:
- Визуальный осмотр с помощью микроскопа
- Рентгеновский контроль
- Электрическое тестирование
- Термографический анализ
- Испытания на вибрацию и удар
Контроль позволяет выявить дефекты пайки, такие как непропаи, короткие замыкания, трещины в паяных соединениях. Своевременное обнаружение и устранение дефектов повышает надежность электронных устройств.
Пайка планарной микросхемы в Харькове
Заказать ремонт
Имя
Телефон
Сообщение
Ноутбуки являются востребованной техникой среди современных пользователей. Портативные модели используются для учебы, работы и развлечений, доставляя владельцам максимум комфорта и радости. Однако любой электронной технике свойственно выходить из строя. Одна из наиболее распространенных проблем ноутбуков – неисправность планарных микросхем.
Перегрев ноутбука – главная причина того, что чипы теряют свою работоспособность. Если система охлаждения не справляется с регулярной нагрузкой («тяжелые» программы, большое количество файлов, круглосуточное использование и др.), происходят сбои в материнской плате.
Они могут быть вызваны другими факторами (повышенная влажность среды, где хранится техника; скопление пыли в корпусе, загрязнение деталей, механическое воздействие на аппаратуру, т.д.). Первые признаки того, что планарные микросхемы нуждаются в ремонте, заметны по перебоям работы аппаратного обеспечения:
- Долго не включающийся экран.
 Запуск кулера и другие индикаторы указывают на старт работы ноутбука, однако дисплей начинает светиться с опозданием, либо вовсе не загорается.
Запуск кулера и другие индикаторы указывают на старт работы ноутбука, однако дисплей начинает светиться с опозданием, либо вовсе не загорается. - Ноутбук не запускается с первого раза. Требуется несколько попыток, чтобы загрузить систему и начать пользоваться техникой.
- Самопроизвольное выключение устройства, которое владелец часто путает с разряженной батареей. Однако подключение зарядного устройства не решает проблему, и ноутбук снова выключается через определенное время.
- Самостоятельная перезагрузка переносного компьютера также является сигналом того, что чипы BGA-корпуса вышли из строя.
- Перебои или полный отказ работы клавиатуры и touchpad. Устройство не реагирует на USB кабель, отсутствует контакт с разъемом питания (или контакт с разъемом плохой).
- Начинает пропадать картинка. Изображение может тускнеть, мигать, исчезать на время, а потом снова появляться.
 Запуск кулера и другие индикаторы указывают на старт работы ноутбука, однако дисплей начинает светиться с опозданием, либо вовсе не загорается.
Запуск кулера и другие индикаторы указывают на старт работы ноутбука, однако дисплей начинает светиться с опозданием, либо вовсе не загорается.При перегреве в первую очередь страдают чипы, теряя способность передавать сигналы..jpg) Если игнорировать неисправность такого рода, то на микросхеме появляются трещины. Это влечет за собой более серьезную проблему – отсоединение микрочипа от системной платы.
Если игнорировать неисправность такого рода, то на микросхеме появляются трещины. Это влечет за собой более серьезную проблему – отсоединение микрочипа от системной платы.
Наиболее оптимальный способ устранения данной проблемы – пайка планарных микросхем, которые нуждаются в ремонте. Это гораздо дешевле, чем покупка новых комплектующих. Основное условие – профессионально выполненная работа по перепаиванию компонентов BGA-корпуса.
Пайка планарной микросхемы: квалифицированные услуги специалистов в Харькове
Следует отметить, что laptop-оборудование имеет небольшие по размерам платы. Поэтому ремонт микрочипов подразумевает высокий уровень профессионализма, так как пайка микросхем с планарными выходами – настоящая «ювелирная работа». Миниатюрные элементы требуют тщательного внимания и мастерства.
Наша команда специализируется на демонтаже поврежденных BGA чипов (реболлинге) и паяльных работах для их восстановления. Мы ответственно относимся к поставленным задачам, выполняя все пожелания клиентов.![]() Наша цель – восстановить микроэлементы, которые отвечают за бесперебойную работу ноутбука.
Наша цель – восстановить микроэлементы, которые отвечают за бесперебойную работу ноутбука.
Качественное выполнение пайки невозможно без профессионального оборудования, поэтому в распоряжении наших работников лучшие инструменты – паяльные станции, шариковый припой, трафареты, оплетка, мини паяльные станции для ручной обработки изделий и т.д. Мы готовы восстановить ваше компьютерное обеспечение быстро и качественно!
- /remont-noutbuka-asus
- /remont-noutbuka-lenovo
- /remont-noutbuka-msi
- /remont-noutbuka-hp
- /remont-noutbuka-dell
- /remont-noutbuka-acer
ООО Радиокомп — Radiocomp LLC — ООО Радиокомп
|
|
+7 495 020 40 00 / 957 77 45
|
||||||||||||||
Database Products Line Review Site Map: HTML XML |
|
||||||||||||||
|
|
||||||||||||||
 ru
ru
Патент США на неплоскую структуру микросхемы и способ изготовления того же патента (Патент № 8,080,736, выдан 20 декабря 2011 г.
 )
) ОБЛАСТЬ ИЗОБРЕТЕНИЯ -планарная конфигурация и способ изготовления таких структур.
ПРЕДПОСЫЛКИ
Существует много приложений, в которых было бы выгодно использовать неплоские интегральные схемы. Например, оптическому формирователю изображения требуется большая, тяжелая и сложная оптика, если изображение с широким полем зрения (FOV) должно проецироваться на плоскую матрицу фотодетекторов. Возможность изгибать матрицу фотодетекторов в желаемую форму упростила бы требуемую оптику и существенно улучшила бы оптические характеристики формирователя изображения.
Однако непланарная электроника сложна в производстве и, как правило, имеет более низкую производительность по сравнению, например, с современной КМОП-электроникой. Органические подложки обычно используются для обеспечения гибкой электроники, но схемы на основе органических подложек обычно обеспечивают меньшую плотность активных схем и ограничены работой на более низких частотах по сравнению с CMOS.
Другой подход заключается в разделении цепи на несколько смежных сегментов, границы которых можно сложить; Одним из примеров является 3-Die μZ ™ Folded Die Stack от Tessera, Inc. Однако этот метод имеет тенденцию приспосабливаться к ограниченному количеству сегментов и требует межсоединений большого размера между сегментами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Здесь представлены структура микросхемы и способ изготовления, которые позволяют складывать структуру в желаемую неплоскую конфигурацию.
Описанная здесь структура изначально представляет собой плоскую полупроводниковую пластину, на которой сформирована схема. Плоская пластина сегментирована на множество плиток, и между соседними парами плиток соединено множество шарнирных механизмов. Плитки и шарнирные механизмы расположены таким образом, что сегментированная пластина может быть сложена в требуемую неплоскую конфигурацию, имеющую высокий коэффициент заполнения и небольшие зазоры между плитками.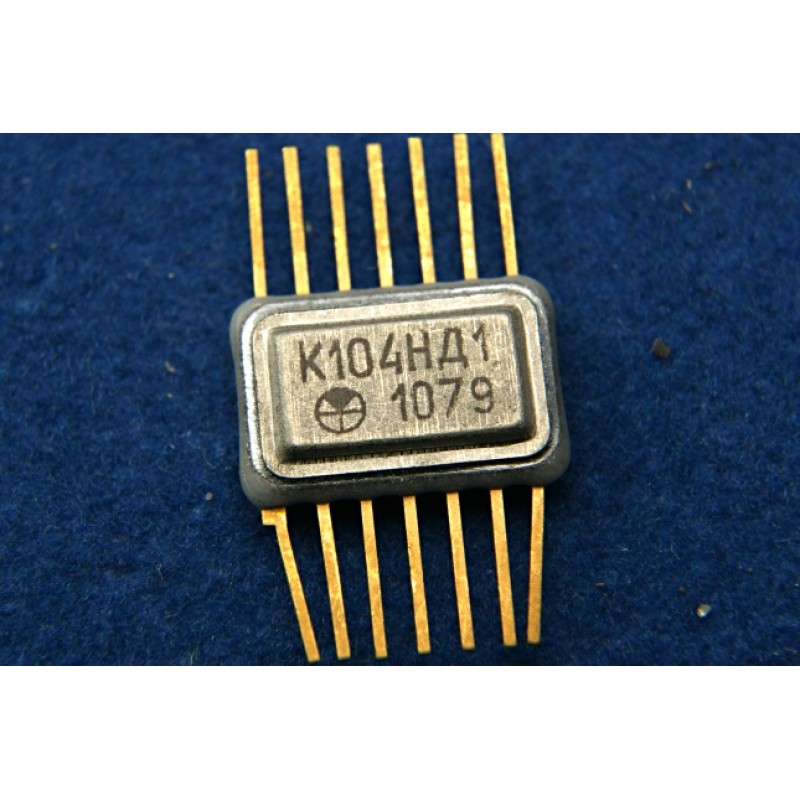
Описано несколько средств, с помощью которых могут быть обеспечены шарнирные механизмы конструкции. Например, шарнирные механизмы могут содержать органический материал, нанесенный на пластину таким образом, что он обеспечивает механическое соединение между соседними парами плиток. Металлические соединительные дорожки, обеспечивающие электрические соединения между соседними парами плиток, могут быть сформированы непосредственно над органическими шарнирными механизмами или могут быть проложены между соседними парами плиток через податливые перемычки, соединяющие соседние пары плиток.
В качестве альтернативы, металлические соединительные дорожки конструкции, которые обеспечивают электрические соединения между соседними парами плиток, могут служить частью или всем шарнирным механизмом. При желании шарнирные механизмы соединения могут быть расположены так, чтобы компенсировать угловое отклонение между соседними парами плиток шарнирного механизма. Металлические соединительные шарнирные механизмы, которые предпочтительно имеют конформное покрытие, могут также включать два или более уровней металла.
Складная микросхема может быть изготовлена путем постобработки полупроводниковой пластины, такой как стандартная КМОП-схема, для формирования сегментированной пластины. Плитки, на которые сегментирована пластина, имеют форму, обеспечивающую высокий коэффициент заполнения в складчатой геометрии. При таком расположении сегментированная пластина может быть сложена, например, в виде кусочно-изогнутой структуры. Такой структурой может быть, например, полусферическая структура, предназначенная для обеспечения массива фотодетекторов с широким полем зрения.
Дополнительные признаки и преимущества изобретения будут очевидны специалистам в данной области техники из следующего подробного описания вместе с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ Подробное описание вариантов осуществления изобретения будет сделано со ссылкой на прилагаемые чертежи, на которых одинаковыми цифрами обозначены соответствующие части на фигурах.
РИС. 1 и 1 представляют собой виды в плане сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 2 a и 2 b представляют собой соответствующие виды в разрезе и сверху, соответственно, иллюстрирующие одну возможную схему металлических соединений для сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 3 a и 3 b представляют собой соответствующие виды в разрезе и сверху, соответственно, иллюстрирующие другую возможную схему металлических соединений для сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 4 a и 4 b представляют собой соответствующие виды в разрезе и сверху, соответственно, иллюстрирующие другую возможную схему металлических соединений для сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 5 a — 5 e представляют собой виды в разрезе, иллюстрирующие один из возможных способов изготовления сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 6 a — 6 c представляют собой вид в перспективе, иллюстрирующий три возможные схемы металлических соединений, которые можно использовать для сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением.
РИС. 7 представляет собой вид в перспективе, иллюстрирующий использование сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением в качестве криволинейной матрицы фотодетекторов.
РИС. 8 представляет собой схему, иллюстрирующую использование оптических элементов и сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением для формирования массива фотодетекторов с широким полем зрения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение позволяет свернуть структуру микросхемы в желаемую неплоскую конфигурацию. Два примерных варианта осуществления показаны на фиг. 1 а и 1 б. В каждом примере схема (не показана) была изготовлена на полупроводниковой пластине, которая затем была сегментирована на множество плиток 10 . Для удержания сегментов вместе и обеспечения возможности складывания сегментированной конструкции используется множество шарнирных механизмов 9.0003 14 соединены между соседними парами плиток. Плитки и шарнирные механизмы расположены таким образом, что сегментированная пластина может быть сложена в требуемую неплоскую конфигурацию, имеющую высокий коэффициент заполнения и небольшие зазоры между плитками.
В одном варианте осуществления множество шарнирных механизмов микроструктуры может содержать органический материал, нанесенный на пластину таким образом, что он обеспечивает механическое соединение между соседними парами плиток. Органический материал может представлять собой, например, осажденный из паровой фазы полимерный материал, который предпочтительно является изолирующим, поскольку изолирующий материал помогает предотвратить короткие замыкания между плитками и/или дорожками межсоединений. Парилен является предпочтительным органическим материалом. При желании на нанесенный органический материал можно нанести рисунок и протравить, предпочтительно с использованием процесса сухого травления, так, чтобы он присутствовал только в промежутках между соседними краями смежных пар плиток и рядом с ними; ФИГ. 1 a и 1 b иллюстрируют эту возможность, в которой более темные заштрихованные части представляют шарнирные механизмы.
Органический материал может представлять собой, например, осажденный из паровой фазы полимерный материал, который предпочтительно является изолирующим, поскольку изолирующий материал помогает предотвратить короткие замыкания между плитками и/или дорожками межсоединений. Парилен является предпочтительным органическим материалом. При желании на нанесенный органический материал можно нанести рисунок и протравить, предпочтительно с использованием процесса сухого травления, так, чтобы он присутствовал только в промежутках между соседними краями смежных пар плиток и рядом с ними; ФИГ. 1 a и 1 b иллюстрируют эту возможность, в которой более темные заштрихованные части представляют шарнирные механизмы.
Существует несколько способов, с помощью которых можно осуществлять электрические соединения между соседними парами плиток, когда шарнирные механизмы микроструктуры обеспечиваются осажденным органическим материалом. Одна возможность проиллюстрирована на соответствующих видах в разрезе и в плане, показанных на фиг. 2 a и 2 b, соответственно. Две смежные плитки 20 , 22 , на основе которых была изготовлена электронная схема (не показана). Шарнирный механизм 24 состоит из органического материала, который был осажден, с нанесенным рисунком и травлением таким образом, что он механически соединяет плитки 20 и 22 вместе, и присутствует только в промежутках между и рядом с соседними краями пары плитка. Затем можно сформировать одну или несколько дорожек металлических соединений 26 непосредственно поверх узорчатого и протравленного органического материала; в показанном примере трассировка 26 проходит между контактными площадками 28 и 30 на плитках 20 и 22 соответственно через шарнирный механизм 24 .
2 a и 2 b, соответственно. Две смежные плитки 20 , 22 , на основе которых была изготовлена электронная схема (не показана). Шарнирный механизм 24 состоит из органического материала, который был осажден, с нанесенным рисунком и травлением таким образом, что он механически соединяет плитки 20 и 22 вместе, и присутствует только в промежутках между и рядом с соседними краями пары плитка. Затем можно сформировать одну или несколько дорожек металлических соединений 26 непосредственно поверх узорчатого и протравленного органического материала; в показанном примере трассировка 26 проходит между контактными площадками 28 и 30 на плитках 20 и 22 соответственно через шарнирный механизм 24 .
Поскольку конструкция будет складываться, шарнирные механизмы и металлические соединительные дорожки должны находиться на одной стороне пластины, которая может быть либо верхней, либо задней стороной.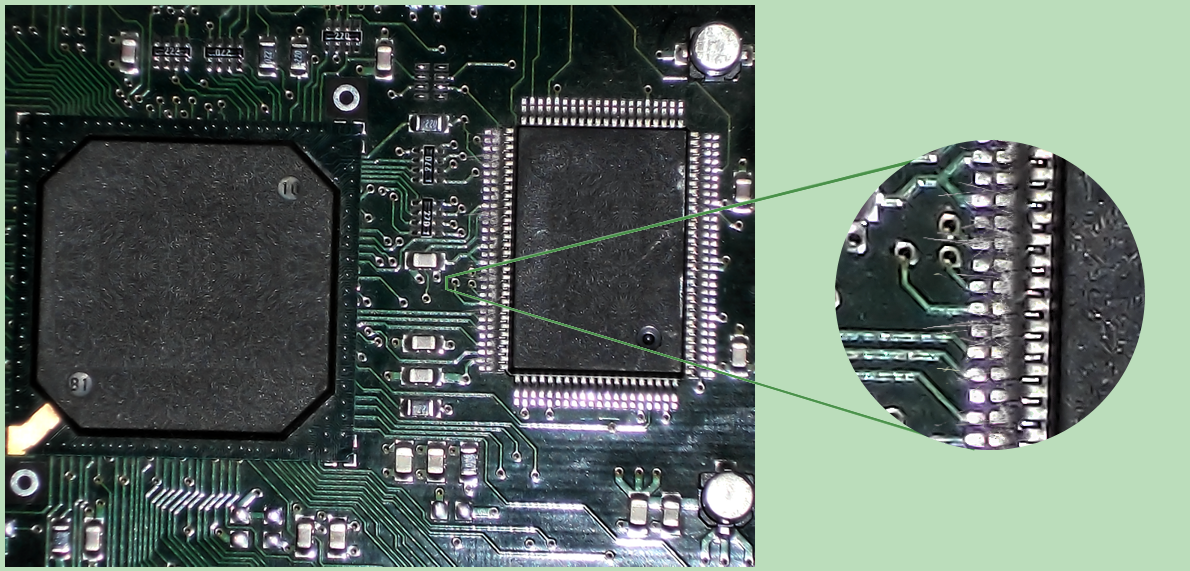
Для смежных пар плиток может быть выгодно иметь соответствующие углубления, расположенные таким образом, чтобы улучшить сцепление шарнирного механизма из органического материала с сегментированными плитками. Пример этого показан на фиг. 2 а, с плитками 20 и 22 с углублениями 32 и 34 соответственно, которые служат для улучшения сцепления шарнирного механизма из органических материалов 24 с плиткой 90 3 40 20 . Углубленное травление можно использовать, когда шарнирные механизмы расположены со стороны схемы пластины или со стороны, не связанной с цепью. При использовании со стороны схемы травление должно быть расположено в «запретной зоне», которая не содержит разводящего металла или схемы. В качестве альтернативы элементы крепления могут быть нанесены или нанесены на поверхность со стороны контура, что улучшит прилипание, не требуя зоны отчуждения. Другой способ выполнения электрических соединений между соседними парами плиток для микроструктуры с использованием органических шарнирных механизмов показан на соответствующих видах в разрезе и в плане, показанных на ФИГ. 3 a и 3 b, соответственно. Показаны две смежные плитки 40 , 42 , на которых изготовлена электронная схема (не показана). Шарнирный механизм 44 состоит из органического материала, который был осажден, с рисунком и травлением таким образом, что он соединяет плитки 40 и 42 вместе механически и присутствует только в промежутках между соседними краями пары плиток и рядом с ними. Однако здесь металлические соединительные дорожки 46 , которые обеспечивают электрические соединения между соседними плитками, проложены через шарнирный механизм 44 через податливую перемычку 48 (показана на фиг.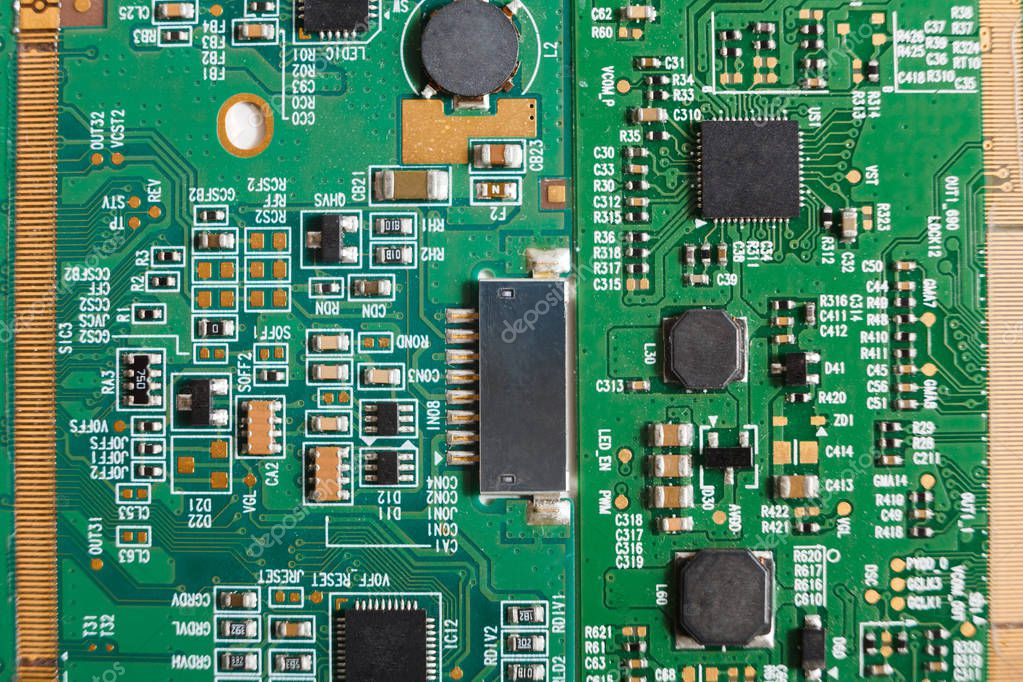
 3 и ), которая охватывает плитки. Соответствующий мост 48 может состоять из тонкопленочных металлов, таких как алюминий или золото. Как и раньше, трасса соединения 46 может заканчиваться на контактных площадках 50 и 52 на плитках 40 и 42 соответственно, а углубленные травления 54 и 590 шарнирный механизм 390 может улучшить сцепление органического материала 44
3 и ), которая охватывает плитки. Соответствующий мост 48 может состоять из тонкопленочных металлов, таких как алюминий или золото. Как и раньше, трасса соединения 46 может заканчиваться на контактных площадках 50 и 52 на плитках 40 и 42 соответственно, а углубленные травления 54 и 590 шарнирный механизм 390 может улучшить сцепление органического материала 44
Одна или несколько металлических дорожек, соединяющих соседние плитки, могут быть расположены так, чтобы компенсировать угловой прогиб между плитками. Это достигается формированием дорожки таким образом, чтобы допускать, по меньшей мере, некоторый изгиб и/или скручивание без разрыва. Один возможный вариант осуществления показан на соответствующих видах в разрезе и в плане, показанных на фиг. 4 a и 4 b, соответственно. Показаны две смежные плитки 60 , 62 . Шарнирный механизм 64 состоит из органического материала, который был нанесен, нанесен по образцу и протравлен таким образом, что он механически соединяет плитки 60 и 62 вместе. Как и на фиг. 3 a и 3 b, эластичная перемычка 66 формируется над петлей 64 , на которую могут опираться металлические соединительные дорожки между соседними плитками. Однако здесь металлическая соединительная дорожка 68 включает в себя поперечный выступ 70 , который позволяет дорожке выдерживать некоторую степень изгиба и/или скручивания без разрушения.
Это достигается формированием дорожки таким образом, чтобы допускать, по меньшей мере, некоторый изгиб и/или скручивание без разрыва. Один возможный вариант осуществления показан на соответствующих видах в разрезе и в плане, показанных на фиг. 4 a и 4 b, соответственно. Показаны две смежные плитки 60 , 62 . Шарнирный механизм 64 состоит из органического материала, который был нанесен, нанесен по образцу и протравлен таким образом, что он механически соединяет плитки 60 и 62 вместе. Как и на фиг. 3 a и 3 b, эластичная перемычка 66 формируется над петлей 64 , на которую могут опираться металлические соединительные дорожки между соседними плитками. Однако здесь металлическая соединительная дорожка 68 включает в себя поперечный выступ 70 , который позволяет дорожке выдерживать некоторую степень изгиба и/или скручивания без разрушения. Как и раньше, трасса соединения 68 может заканчиваться на контактных площадках 71 и 72 на плитках 60 и 62 соответственно, а углубленные травления 74 и 79 могут служить для улучшения сцепления органического материала 30 шарнирного механизма 30 64 до плитки 60 и 62 соответственно.
Как и раньше, трасса соединения 68 может заканчиваться на контактных площадках 71 и 72 на плитках 60 и 62 соответственно, а углубленные травления 74 и 79 могут служить для улучшения сцепления органического материала 30 шарнирного механизма 30 64 до плитки 60 и 62 соответственно.
Обратите внимание, что металлические соединительные дорожки, расположенные так, чтобы компенсировать угловое отклонение между плитками, также могут использоваться в варианте осуществления, показанном на РИС. 2 a и 2 b, , в которых дорожки формируются непосредственно над узорчатым и протравленным органическим материалом, составляющим шарнир.
Как отмечалось выше, электрические соединения между соседними плитками могут быть выполнены с помощью металлических соединительных дорожек. В другом возможном варианте осуществления изобретения металлические соединительные дорожки между соседними плитками могут служить полностью или частично шарнирным механизмом, соединяющим пару вместе. Металлические дорожки межсоединений между плитками могут быть частью металла межсоединений, необходимого для схем, изготовленных на пластине. Например, если схема представляет собой КМОП-схему, металлические дорожки межсоединений между ячейками могут быть сформированы непосредственно из многослойного металла маршрутизации, который является частью КМОП-схемы.
В другом возможном варианте осуществления изобретения металлические соединительные дорожки между соседними плитками могут служить полностью или частично шарнирным механизмом, соединяющим пару вместе. Металлические дорожки межсоединений между плитками могут быть частью металла межсоединений, необходимого для схем, изготовленных на пластине. Например, если схема представляет собой КМОП-схему, металлические дорожки межсоединений между ячейками могут быть сформированы непосредственно из многослойного металла маршрутизации, который является частью КМОП-схемы.
Дорожки предпочтительно имеют конформное покрытие, чтобы обеспечить дополнительную механическую связь и структурную целостность между соседними плитками, а также обеспечить защиту дорожек. Конформное покрытие предпочтительно содержит полимер, который может быть нанесен в виде слоя сверху или снизу дорожек, или, что предпочтительнее, в виде слоев как сверху, так и снизу дорожек, что служит для минимизации деформации на дорожках. металл.
металл.
РИС. 5 а — 5 е представляют собой виды в разрезе, иллюстрирующие один из возможных способов изготовления сегментированной и шарнирной структуры микросхемы в соответствии с настоящим изобретением, в котором металлические соединительные дорожки между соседними плитками служат всем или частью шарнирного механизма, соединяющего пару вместе. На фиг. 5 a, схемотехника (не показана) и металлические дорожки межсоединений 80 сформированы на планарной полупроводниковой пластине 82 обычным способом с диэлектрическими слоями 84 , 86 нанимаются по мере необходимости. Как отмечалось выше, если схема представляет собой, например, КМОП-схему, металлические дорожки 80 межсоединений могут состоять из одного или нескольких слоев металлической разводки в процессе КМОП-схемы. Канавка 88 протравлена на задней стороне пластины до первого диэлектрического слоя 84 (фиг. 5 b ). Пластину предпочтительно травят с использованием процесса глубокого реактивно-ионного травления (DRIE), например, с использованием химического травления и пассивации с последовательностью во времени. Результирующие промежутки между плитками должны иметь такой размер, чтобы каждая плитка могла двигаться, в то же время сводя к минимуму мертвое пространство конструкции, образующееся, когда сегментированные плитки складываются в желаемую форму.
5 b ). Пластину предпочтительно травят с использованием процесса глубокого реактивно-ионного травления (DRIE), например, с использованием химического травления и пассивации с последовательностью во времени. Результирующие промежутки между плитками должны иметь такой размер, чтобы каждая плитка могла двигаться, в то же время сводя к минимуму мертвое пространство конструкции, образующееся, когда сегментированные плитки складываются в желаемую форму.
Диэлектрический слой в зазоре, образованном канавкой, затем вытравливается, освобождая металлическое соединение 90 (фиг. 5 c ). При желании на пластину наносят конформное покрытие 92 , тем самым обеспечивая конформные слои как на верхней, так и на нижней части соединения 90 , чтобы обеспечить механическую поддержку (фиг. 5 d ). Как показано на фиг. 5 e, микроструктура теперь гибкая и может быть деформирована в неплоскую форму. Благодаря такому использованию металлических межсоединений конструкции отпадает необходимость в последующей постобработке межсегментных электрических соединений. Этот подход также обеспечивает высокую плотность электрических соединений и позволяет тестировать схему до какой-либо постобработки.
Этот подход также обеспечивает высокую плотность электрических соединений и позволяет тестировать схему до какой-либо постобработки.
Описанная здесь микроструктура может быть основана на различных полупроводниковых материалах и содержать различные типы схем. Например, в одном предпочтительном варианте осуществления структура представляет собой КМОП-схему с алюминиевыми межсоединениями, изготовленную на кремниевой пластине с использованием обычных технологий изготовления КМОП. В этом случае складная схема создается путем постобработки планарной КМОП-схемы для формирования сегментированной схемы. Этот подход позволяет разработчику использовать современную литейную КМОП-технологию, которая существует для проектирования и изготовления планарных КМОП-схем без ущерба для производительности. Это также позволяет изготавливать схемы с более высокой плотностью и производительностью, чем могут быть достигнуты в конструкциях, использующих гибкие органические подложки.
Ширина сегментированных плиток обычно составляет от десятков микрон до нескольких миллиметров; если плитки меньше примерно 10 микрон, зазор между соседними плитками будет доминировать в потреблении площади кристалла, в то время как плитки больше нескольких миллиметров значительно ограничат количество плиток, которые поместятся в данной плоской области матрицы, если только не очень большая матрица. размер был в наличии.
размер был в наличии.
Как описано выше в отношении ФИГ. 4 a и 4 b, одна или несколько металлических направляющих, соединяющих смежные плитки, могут быть расположены так, чтобы компенсировать угловое отклонение между плитками, достигаемое путем формирования направляющей таким образом, чтобы она выдерживала, по меньшей мере, некоторый изгиб и/или скручивание без разрушения. Это проиллюстрировано для варианта осуществления, в котором соединительные дорожки служат всеми или частью шарнирных механизмов на фиг. 6 а и 6 б. На фиг. 6 a, a металлическая соединительная дорожка 100 соединяет сегментированную плитку 102 с сегментированной плиткой 104 . В этом варианте нет приспособления для углового отклонения. На фиг. 6 b, металлическая соединительная дорожка 100 изготовлена таким образом, что она включает в себя боковую ступеньку 106 , которая позволяет трассе компенсировать большее угловое отклонение между плитками, чем конфигурация на фиг.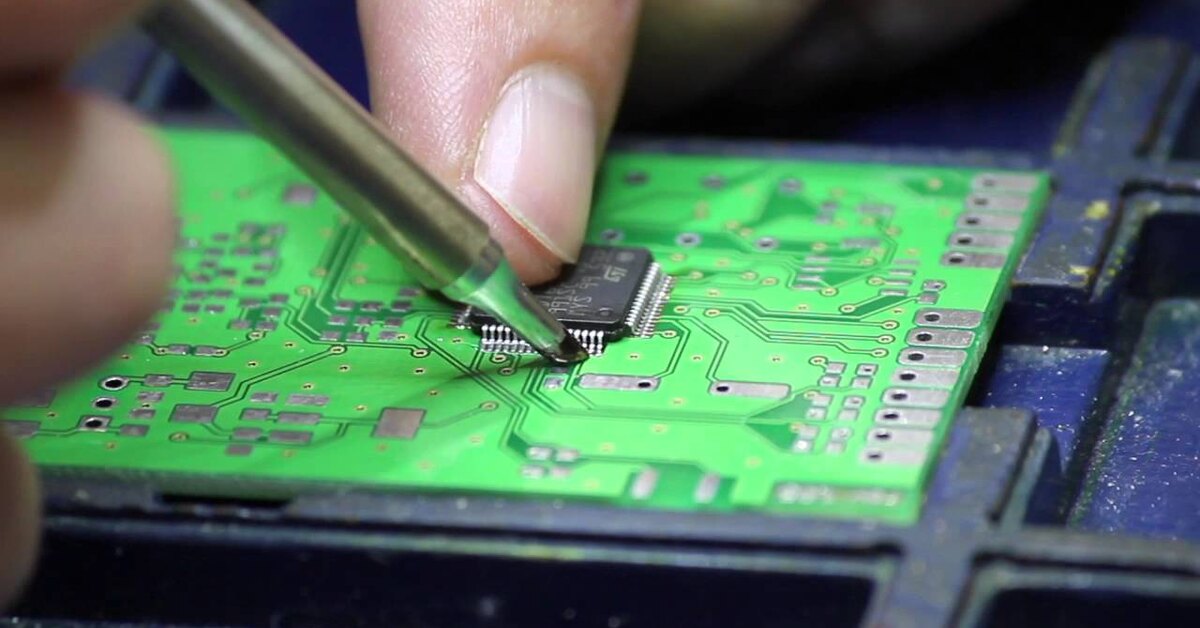 6 а. Обратите внимание, что существует множество способов изготовления дорожек межсоединений, чтобы улучшить степень, в которой они компенсируют угловое отклонение; боковой изгиб, как показано на фиг. 6 b — это всего лишь один из способов.
6 а. Обратите внимание, что существует множество способов изготовления дорожек межсоединений, чтобы улучшить степень, в которой они компенсируют угловое отклонение; боковой изгиб, как показано на фиг. 6 b — это всего лишь один из способов.
Другой вариант показан на фиг. 6 г. Здесь металлическая соединительная дорожка 110 между плитками 102 и 104 изготовлена таким образом, что она имеет более одного уровня; двухуровневая трасса показана на фиг. 6 г. Такое многоуровневое расположение служит для увеличения жесткости конструкции.
Как отмечалось выше, важно, чтобы плитки, на которые сегментируется пластина, имели форму, обеспечивающую высокий коэффициент заполнения в складчатой геометрии. Как правило, желаемая трехмерная форма может быть разложена на плоскую поверхность, а существующая инфраструктура интегральных схем может быть использована для изготовления полученной двумерной схемы. При правильном проектировании плиток можно сформировать сложные трехмерные формы.
При правильном проектировании плиток можно сформировать сложные трехмерные формы.
Желаемая неплоская конфигурация может быть получена, например, путем складывания сегментированной пластины вокруг оправки. Такая оправка предпочтительно должна быть растворимой или иметь растворимый поверхностный слой для облегчения высвобождения, и следует выполнять этап или этапы последующей обработки, посредством которых оправка или разделительный слой будут растворяться.
Одной из очень желательных трехмерных форм является криволинейная поверхность. Например, плитки схемы, сегментированные и шарнирно закрепленные, как описано в данном документе, могут иметь такую форму, что их можно сгибать для образования кусочно-изогнутой структуры, такой как сферическая или полусферическая структура. Пример показан на фиг. 7. Здесь сегментированные плитки 110 имеют такую форму, что полученная конструкция может быть сложена в виде кусочно-полусферической конструкции 112 , имеющей высокий коэффициент заполнения и небольшие зазоры между плитками.
Одно из возможных применений конструкции такого типа — криволинейная матрица фотодетекторов. Как отмечалось выше, для оптического формирователя изображения требуется большая, тяжелая и сложная оптика, если изображение с широким полем зрения должно проецироваться на плоскую матрицу фотодетекторов. Возможность изогнуть матрицу фотодетекторов упрощает требуемую оптику и существенно улучшает оптические характеристики имидж-сканера.
Матрица фотодетекторов, выполненная в соответствии с изобретением, может обеспечить широкое поле зрения (~120°) с помощью простой оптики. Диаграмма, иллюстрирующая это, показана на фиг. 8. Предусмотрена матрица , 120 фотодетекторов, изогнутая, как описано здесь, и оптические элементы , 122 , расположенные перед матрицей, так что входящий свет фокусируется на вогнутой поверхности матрицы в широком поле зрения.
Матрица фотодетекторов, показанная на РИС. 7 и 8 могут содержать один или несколько дополнительных слоев. Например, можно использовать дополнительный слой для обеспечения схемы считывания матрицы фотодетекторов.
Например, можно использовать дополнительный слой для обеспечения схемы считывания матрицы фотодетекторов.
Существует множество возможных применений складной микросхемы, описанной здесь. Изогнутый фотодетектор или матрица фокальной плоскости (FPA), как описано выше, можно использовать для обеспечения формирования изображения с широким полем зрения; такой имидж-сканер может быть развернут, например, как часть дистанционного датчика или беспилотного летательного аппарата (БПЛА). Изогнутая структура такого рода также может быть полезной для схемы с определенным направлением, такой как акустический датчик, или для размещения схемы в ограниченном пространстве или для ее согласования с геометрией платформы хоста.
Варианты осуществления изобретения, описанные здесь, являются примерными, и можно легко представить многочисленные модификации, вариации и перестановки для достижения по существу эквивалентных результатов, все из которых предназначены для охвата духа и объема изобретения, как определено в прилагаемой формуле изобретения. .
.
Планарные катомы — Университет Карнеги-Меллона
Создание движения без движущихся частей
Самодействующий планарный катом в форме цилиндра проверяет концепции движения, распределения энергии, передачи данных и связи, которые в конечном итоге будут включены в ансамбли нанороботов. Он обеспечивает испытательный стенд для архитектуры микроэлектромеханических систем для самовозбуждения в модульных роботизированных устройствах. Используя магнитную силу для создания движения, его работа в качестве исследовательского инструмента наводит мост на инженерный уровень, который позволит производить самодействующие наносистемные устройства.
Планарный катом примерно в 45 раз больше в диаметре, чем миллиметровый катом, прототипом которого является его работа. Он работает на двухмерной плоскости в небольших группах от двух до семи модулей, чтобы позволить исследователям понять, как микроэлектромеханические устройства могут двигаться и общаться в масштабе, который люди еще не могут легко воспринять или вообразить. Он образует мост в эту область через развивающуюся конструкцию сложной электромагнитной системы, характеристики которой следовали путем проб и ошибок, поскольку исследовательская группа CMU-Intel Claytronics проверяла концепцию робота, который движется без движущихся частей.
Он образует мост в эту область через развивающуюся конструкцию сложной электромагнитной системы, характеристики которой следовали путем проб и ошибок, поскольку исследовательская группа CMU-Intel Claytronics проверяла концепцию робота, который движется без движущихся частей.
За свою краткую историю демонстрации движения без движущихся частей планарный катом эволюционировал в восьми версиях. Он начал свою жизнь как концептуальный автомобиль, спроектированный с использованием оборудования из каталога. Он стал специально разработанной электронной и магнитной системой, которая несет на борту полный пакет управления.
При весе 100 граммов, Planar Catom V8, показанный на этой фотографии, демонстрирует стопку управляющих и магнито-датчиковых колец. Его твердотельные электронные элементы управления находятся на вершине стека. Отдельное кольцо управления предназначено для каждого из двух колец магнитных датчиков, расположенных в основании модуля. Два тонких стержня с резьбой проходят как боковые балки сверху вниз через внешний край, чтобы скрепить кольца.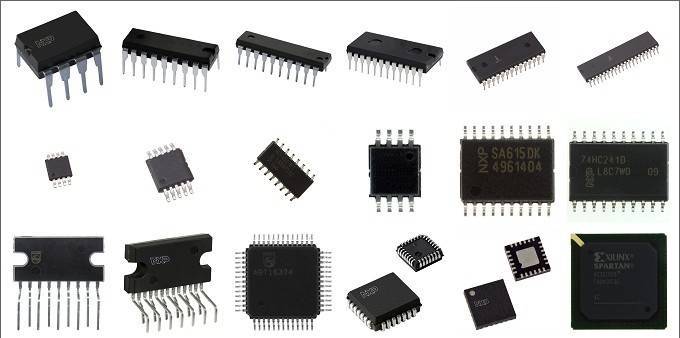 Стек центрального разъема несет цепи между кольцами управления и магнитными кольцами, что упрощает обращение с компонентами и их обслуживание, а также обеспечивает внутреннее выравнивание и стабильность вдоль оси цилиндра.
Стек центрального разъема несет цепи между кольцами управления и магнитными кольцами, что упрощает обращение с компонентами и их обслуживание, а также обеспечивает внутреннее выравнивание и стабильность вдоль оси цилиндра.
В основании плоского катома два более тяжелых электромагнитных кольца, которые составляют двигатель устройства, также добавляют устойчивости. Чтобы создать движение, магнитные кольца обмениваются притяжением и отталкиванием электромагнитной силы с магнитными кольцами на соседних атомах. Благодаря этому преобразованию электрической энергии в кинетическую модуль достигает вращательного движения для моделирования сферического вращения атомов миллиметрового масштаба.
Движение от двух магнитных колец
На изображении сверху (слева, внизу) два магнитных кольца из Planar Catom V7 показывают расположение их 12 магнитов вокруг отдельных плат драйверов и конструкцию катушки для подковообразных магнитов, представленную в Версии 6 и затем обновился в версиях 7 и 8.
Магниты расположены в защитном кольце в виде прямых граней 12-стороннего многоугольника, закрепленного на акриловой пластине, удерживающей их на месте. Подковообразные магниты имеют магнитную проволоку 39AWG, намотанную на стальные сердечники AISI 1010, компоненты выбраны так, чтобы сбалансировать обрабатываемый металл и плотность насыщения магнитным потоком.
Вместо бочкообразных магнитов с круглым лицом в версиях Planar Catom 1-5 был принят подковообразный магнит, чтобы увеличить силу магнита и создать более широкое пятно контакта. Он также представляет собой эволюцию использования магнитов с плоской поверхностью, которые были представлены в версии 5 Planar Catom. Плоские поверхности оказались более эффективными для контакта, чем магниты с круглой поверхностью. В полностью собранном катоме, как видно на предыдущем изображении V8 (вверху справа), под каждым из этих колец будет двигаться второе магнитное кольцо. Поверхности нижних колец будут смещены к 12 зазорам, которые появляются между магнитами на этом виде сверху.
На этом изображении также подчеркивается геометрия магнитов с плоской поверхностью как силовых эффекторов. Катом поддерживает движение по часовой стрелке или против часовой стрелки за счет непрерывной передачи электромагнитной силы для достижения противоположного движения в другом катоме.
По сравнению с шаговым двигателем, еще одним бесщеточным синхронным двигателем, который использует большое количество шагов для поддержания движения, планарный катом сталкивается с уникальными проблемами, связанными с выравниванием и трением, которые предлагает это изображение.
Представьте себе третий катом, вращающийся в пространстве над параллельным вращением этих соседних магнитных колец. Его магниты будут контактировать с магнитами в направлении верхней части двух магнитных колец, показанных здесь, из-за физической невозможности соприкосновения его магнитных поверхностей ближе к точке, где эти два обмениваются контактом.
Эта конфигурация подчеркивает временно «сиротский» характер магнитов, расположенных по обе стороны от точек контакта в любой данный момент вращения соседних катомов.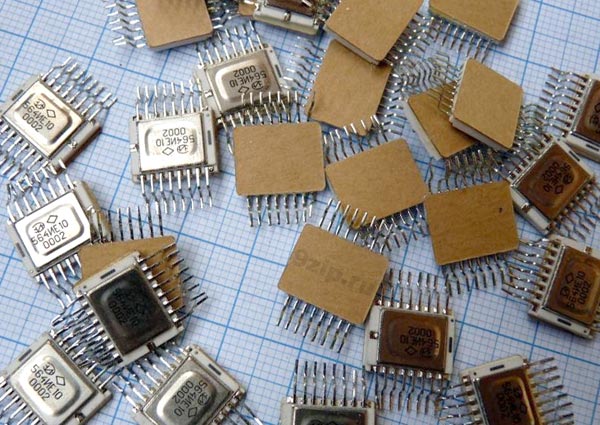 Чтобы лучше управлять потоком энергии в этом случае, когда контактный магнит блокирует потенциал своих соседей, контроллер управляет каждым магнитным кольцом как тремя независимыми группами по четыре магнита. Таким образом, можно направить мощность на один магнит в группе из четырех по мере вращения в ансамбле.
Чтобы лучше управлять потоком энергии в этом случае, когда контактный магнит блокирует потенциал своих соседей, контроллер управляет каждым магнитным кольцом как тремя независимыми группами по четыре магнита. Таким образом, можно направить мощность на один магнит в группе из четырех по мере вращения в ансамбле.
Эта электрическая схема повышает точность выравнивания атомов. Это улучшает контроль крутящего момента и управление теплом. Это также устраняет 18 ненужных путей прохождения сигнала из более ранней архитектуры, которая выделяла независимый путь прохождения сигнала для каждого магнита. Этот дизайн для улучшения функциональности представляет собой 30-процентное снижение сложности схемы. Он также иллюстрирует влияние аксиомы ансамбля как всеобъемлющего критерия проектирования. В данном случае это приводит к экономии функций для уменьшения сложности устройства. Поскольку для ансамбля не было никакой выгоды от возможности одновременного срабатывания четырех соседних магнитов, массивы из четырех магнитов были объединены электронным способом, чтобы сфокусировать срабатывание на самом магните в группе, который находится ближе всего к соседнему атому. Эта модификация дизайна расширяет функциональные возможности ансамбля, одновременно упрощая элемент комплексного выравнивания модуля.
Эта модификация дизайна расширяет функциональные возможности ансамбля, одновременно упрощая элемент комплексного выравнивания модуля.
Плотность электроники для управления устройством
Эта экономия в конструкции элементов управления также дает больше места для остальной части надежного электронного блока, управляющего модулем.
На рисунке справа показано планарное кольцо контроллера катома со светодиодами, расположенными по его периметру. Эта плата управляет двумя платами привода магнитов, встроенными в магнитные кольца, как показано на изображении выше.
Индивидуальный дизайн электроники обеспечивает очень высокий уровень производительности модуля. Каждая плата контроллера, построенная с использованием самых маленьких коммерчески доступных компонентов, содержит 5 слоев встроенных микросхем на акриловых платах диаметром 45 мм. При такой плотности схемотехники каждое из двух колец контроллера обеспечивает примерно в 40 раз больше встроенных инструментов, чем стандартный пакет контроллера робототехники, занимая 2/5 места. В результате емкость его плат позволяет модулю нести на борту все устройства, необходимые для управления его прошивкой, драйверами и 24 магнитами.
В результате емкость его плат позволяет модулю нести на борту все устройства, необходимые для управления его прошивкой, драйверами и 24 магнитами.
Более типичный сервоконтроллер для робототехники будет нести микропроцессор, моторы, сервоприводы и другие устройства на одной стороне платы размером 50 мм x 75 мм, встроенной в два слоя микросхем. При создании плоских катомов для исследования индивидуальной системы срабатывания, которая создает движение без движущихся частей, команда разработчиков также достигла дополнительной цели создания надежного автономного модульного робота.
Преследуя более широкую цель, чем тестирование отдельной системы для модульного робота, исследовательская группа приобрела опыт работы с интерфейсами микроэлектромеханических систем (МЭМС), в которых используются «бесполые» разъемы, при тестировании алгоритмов передачи данных и мощности в одинарных цепях, точки соединения которых находятся в переходном состоянии из-за вращения модулей, из которых формируются цепи.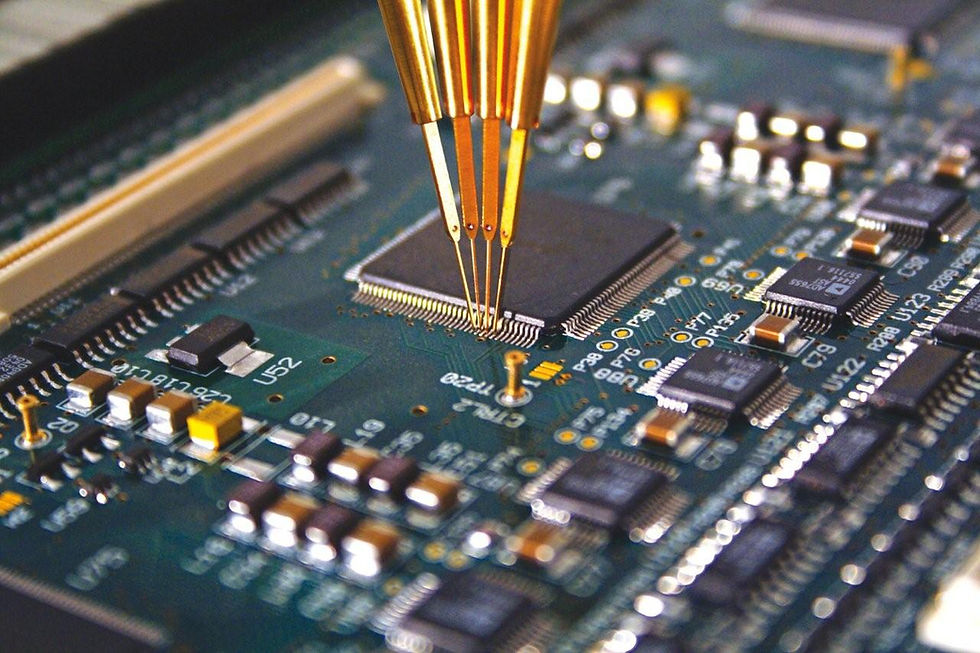 В этом суть проблемы создания наноразмерных устройств, движение которых позволит формировать трехмерные представления объектов из ансамблей тысяч атомов.
В этом суть проблемы создания наноразмерных устройств, движение которых позволит формировать трехмерные представления объектов из ансамблей тысяч атомов.
Еще один компонент этой надежной электронной системы показан на рисунке ниже: панель инфракрасной связи Planar Catom.
В этом устройстве передатчики и приемники инфракрасных данных (IrDA) отдельно мультиплексированы для передачи и приема сигналов по отдельным каналам, что обеспечивает быструю одновременную передачу по всем каналам. Эти функции глобальной связи предвосхищают необходимость отладки и перепрограммирования больших ансамблей катомов.
Целью разработки этих компонентов является система, поддерживающая совместное поведение наноразмерных роботизированных модулей. Эта концепция поведения машины заключается в том, что первичные устройства направляют свое собственное движение к общей цели, используя функциональность, которая фокусирует каждый элемент конструкции на требованиях ансамбля, а не на требованиях отдельного робота. Таким образом, инженерный проект придерживается аксиомы ансамбля, включая в эти устройства только те функции, которые улучшают функциональность ансамбля.
Таким образом, инженерный проект придерживается аксиомы ансамбля, включая в эти устройства только те функции, которые улучшают функциональность ансамбля.
На данном этапе развития эту модель совместного движения — движение без движущихся частей — можно увидеть на этом видео, где два плоских катома обмениваются электромагнитной силой, чтобы развить круговое движение.
Гибкость его электромагнитной системы также позволяет планарным катомам имитировать формы гексагональных и кубических решеток, а также различные неправильные многоугольные конфигурации, которые имеют отношение к моделированию ансамблей наноразмерных катомов. Эти формы соответствуют конфигурации решетки, которая оптимизирует связь между отдельными сферическими атомами в ансамбле. Например, в полностью населенном трехмерном шестиугольном ансамбле отдельный катом будет иметь прямой контакт с 12 другими катомами.
Шестиугольная конфигурация группы плоских катомов выделена в этом концептуальном видео, которое демонстрирует принцип движения без движущихся частей.
