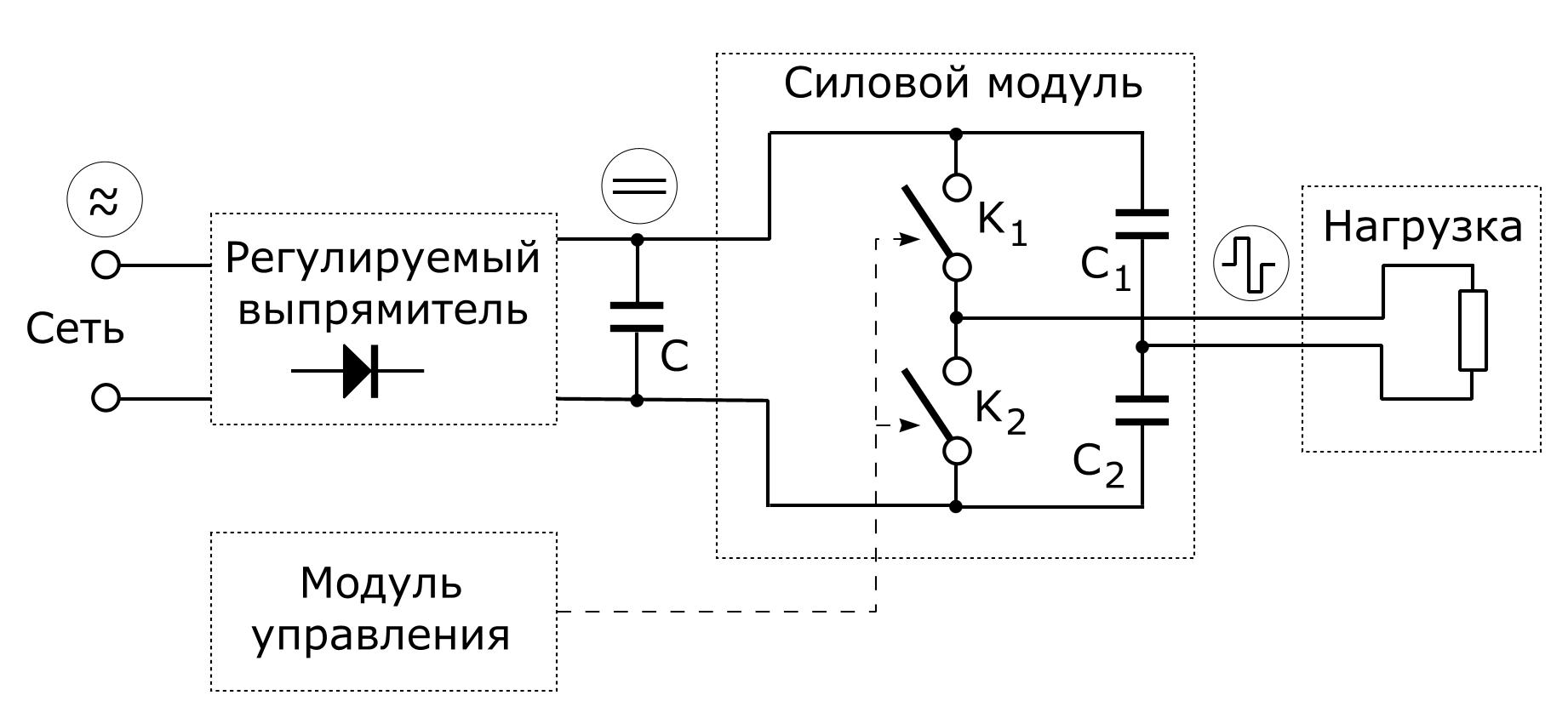
Как работает полумостовая схема сварочного инвертора. Из каких основных блоков состоит принципиальная схема инвертора. Какие компоненты входят в состав силовой части и системы управления инвертора.
Принцип работы полумостовой схемы сварочного инвертора
Полумостовая схема является одной из наиболее распространенных топологий, используемых в сварочных инверторах. Рассмотрим принцип ее работы более подробно:
- На вход схемы подается переменное напряжение сети 220В, которое выпрямляется с помощью диодного моста.
- Выпрямленное напряжение сглаживается конденсаторами большой емкости до постоянного напряжения около 300В.
- Два мощных IGBT или MOSFET транзистора, работающие в ключевом режиме, преобразуют постоянное напряжение в переменное высокой частоты (20-100 кГц).
- Высокочастотный трансформатор понижает напряжение до требуемого уровня (60-80В).
- Выходной выпрямитель преобразует переменное напряжение обратно в постоянное, пригодное для сварки.
Такая схема позволяет значительно уменьшить габариты и вес сварочного аппарата по сравнению с традиционными трансформаторными устройствами.
Основные блоки принципиальной схемы сварочного инвертора
Принципиальная схема инвертора состоит из следующих основных функциональных блоков:
- Входной выпрямитель и фильтр
- Силовой высокочастотный преобразователь
- Высокочастотный трансформатор
- Выходной выпрямитель
- Система управления
- Вспомогательный источник питания
Каждый из этих блоков выполняет свою специфическую функцию в процессе преобразования входного сетевого напряжения в выходной сварочный ток.
Входной выпрямитель и фильтр сварочного инвертора
Входной выпрямитель и фильтр выполняют следующие функции:
- Выпрямление входного переменного напряжения сети
- Сглаживание пульсаций выпрямленного напряжения
- Защита от высоковольтных импульсных помех из сети
Типовая схема входного выпрямителя содержит:
- Диодный мост на 4 диодах
- Электролитические конденсаторы большой емкости (1000-4000 мкФ)
- Варистор для защиты от импульсных перенапряжений
- Предохранитель на входе
Качественное выпрямление и фильтрация входного напряжения важны для стабильной работы всего инвертора.
Силовой высокочастотный преобразователь инвертора
Силовой преобразователь является ключевым узлом инвертора. Он выполняет следующие функции:
- Преобразование постоянного напряжения в переменное высокой частоты
- Регулирование выходной мощности инвертора
- Формирование требуемой внешней вольт-амперной характеристики
Основными компонентами силового преобразователя являются:
- Мощные IGBT или MOSFET транзисторы (2-4 шт)
- Драйверы управления затворами транзисторов
- Снабберные цепи для защиты транзисторов
- Датчики тока и напряжения в силовой цепи
От качества силовых транзисторов и их системы управления во многом зависят характеристики всего сварочного инвертора.
Высокочастотный трансформатор сварочного инвертора
Высокочастотный трансформатор выполняет следующие функции в схеме инвертора:
- Гальваническая развязка входных и выходных цепей
- Понижение высокого входного напряжения до уровня, необходимого для сварки
- Согласование входного и выходного сопротивления инвертора
Особенности конструкции ВЧ трансформатора:

- Применение ферритовых или аморфных сердечников
- Использование литцендрата для обмоток
- Специальные методы намотки для снижения паразитных параметров
- Эффективное охлаждение сердечника и обмоток
Качественный расчет и изготовление трансформатора критически важны для получения высокого КПД инвертора.
Выходной выпрямитель сварочного инвертора
Выходной выпрямитель преобразует высокочастотное переменное напряжение со вторичной обмотки трансформатора в постоянный сварочный ток. Его основные функции:
- Выпрямление переменного напряжения
- Сглаживание пульсаций выходного тока
- Защита от короткого замыкания на выходе
Типовая схема выходного выпрямителя содержит:
- Быстродействующие диоды Шоттки
- Дроссель фильтра
- Конденсаторы фильтра
- Варистор для защиты от перенапряжений
Важно обеспечить минимальные потери в выходном выпрямителе, так как через него протекает большой сварочный ток.
Система управления сварочного инвертора
Система управления является «мозгом» сварочного инвертора. Она выполняет следующие основные функции:
- Регулирование выходного тока и напряжения
- Реализация различных сварочных режимов
- Защита инвертора от аварийных режимов
Основные компоненты системы управления:
- Микроконтроллер или специализированная ШИМ-микросхема
- Драйверы управления затворами транзисторов
- Цепи обратной связи по току и напряжению
- Цепи защиты и сигнализации
Качественная система управления обеспечивает стабильность параметров сварки и надежность работы инвертора в целом.
Вспомогательный источник питания сварочного инвертора
Вспомогательный источник питания обеспечивает электроэнергией все низковольтные цепи инвертора. Его основные функции:
- Питание системы управления
- Питание драйверов силовых транзисторов
- Питание вентиляторов охлаждения
- Питание индикации и органов управления
Типовая схема вспомогательного источника содержит:
- Понижающий трансформатор
- Выпрямитель
- Стабилизаторы напряжения
- Преобразователь для гальванической развязки
Надежная работа вспомогательного источника критически важна для функционирования всего инвертора.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
 21.
21.
 %
% %
% %
%
 su 2017-2020 — Не является автором материалов. Исключительное право сохранено за автором текста.
su 2017-2020 — Не является автором материалов. Исключительное право сохранено за автором текста. Принцип работы сварочного инвертора: что полезно знать?
Без сварочного инвертора сегодня вряд ли обойдется производство, строительство или быт, поскольку при соединительных работах различной степени сложности помогает присутствие сварочного аппарата. Под обличием сварочного инвертора скрываются инверторные преобразователи напряжения на широкий диапазон мощностей, от единиц ватт до десятков киловатт. Принцип работы сварочного инвертора позволяет понять его устройство и другие важные моменты, а поэтому считаем необходимым подробный обзор данного приспособления.
Ближе к сути
Особенность сварочного инвертора заключается в возможности его работы на статическую нагрузку. За минувшие несколько десятилетий инверторные преобразователи токов стали использоваться в условиях построения электросварочных аппаратов, конструкция которых располагает нагрузкой в виде электрической дуги. Но обо всем по порядку.
За минувшие несколько десятилетий инверторные преобразователи токов стали использоваться в условиях построения электросварочных аппаратов, конструкция которых располагает нагрузкой в виде электрической дуги. Но обо всем по порядку.
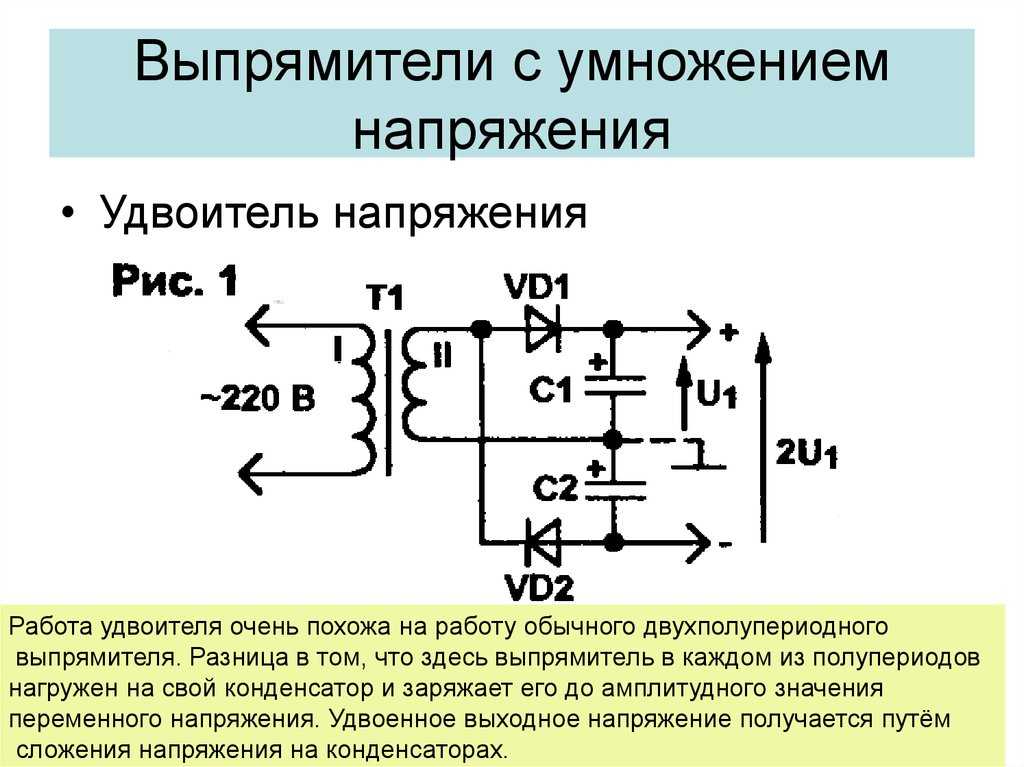
Принцип работы (рис. 1)
Принцип работы любого сварочного аппарата построен на преобразовании переменного тока напряжением 220В или 380В с частотой 50 Гц в постоянный рабочий параметр с соответствующими характеристиками по напряжению холостого хода, рабочему параметру, а также подающей вольтамперной характеристике.
Однако принцип работы рассматриваемого сварочного инвертора отличается от сварочных выпрямителей, которые основаны на диодно мостовых схемах сварочных выпрямителей. В том случае, если на обыкновенных выпрямителях производится однократное выпрямление переменного рабочего параметра после понижающего трансформатора, то в случае с использованием сварочного инвертора применяется многократное преобразование по напряжению, частоте, а также выпрямлению. Разумеется, что качественные технические параметры выпрямленного тока производятся выше.
Разумеется, что качественные технические параметры выпрямленного тока производятся выше.
Принцип работы рассматриваемого сварочного аппарата разбирается на основании работы последовательного инвертора. На рисунке находится изображение структурной схемы. Глядя на изображение схемы, можно понять, что нагрузочные сопротивления, а также коммутационные элементы (ёмкостные, индукционные) включаются в последовательную цепь. Управляющий модуль строится на работе 2 тиристоров.
Преобразованием переменного сварочного тока занимается первичный сетевой выпрямитель, после чего постоянный ток проходит на фильтр, при этом показатель напряжения остается неизменным. Постоянный рабочий параметр сглаживается посредством сетевого фильтра, после чего производится его подача на частотный преобразователь для последующего преобразования в переменный высокочастотный параметр.
Частота сварочного тока может достигать пределов 50-100 кГц. Высокочастотный параметр подается на импульсный трансформатор, после чего сварочный трансформатор производит понижение рабочего параметра высокой частоты до предела напряжения холостого сварочного тока. Выпрямление высокочастотного рабочего параметра сварки производится на выходе рассматриваемого устройства во вторичном выпрямляющем блоке.
Выпрямление высокочастотного рабочего параметра сварки производится на выходе рассматриваемого устройства во вторичном выпрямляющем блоке.
Силовой выпрямительный блок располагает сглаживающими ёмкостными фильтрами для последующего улучшения качественных показателей выпрямителей тока. В свою очередь, управляющий модуль производит контроль, а также изменение характеристик работы рассматриваемого инверторного аппарата.
Принцип работы практически любого сварочного инвертора, в том числе и преобразователя, заключается в области применения импульсного резонанса. Данное направление является новым в области электротехники, с появлением которого стало возможным уменьшение габаритов громоздких сварочных устройств, функционирование которых основано на классической электротехнике.
Нужно заметить, что любое оборудование, основанное на принципиальные инверторные преобразования рабочего параметра, остается на порядок дороже выпрямителей, а также силовых трансформаторов.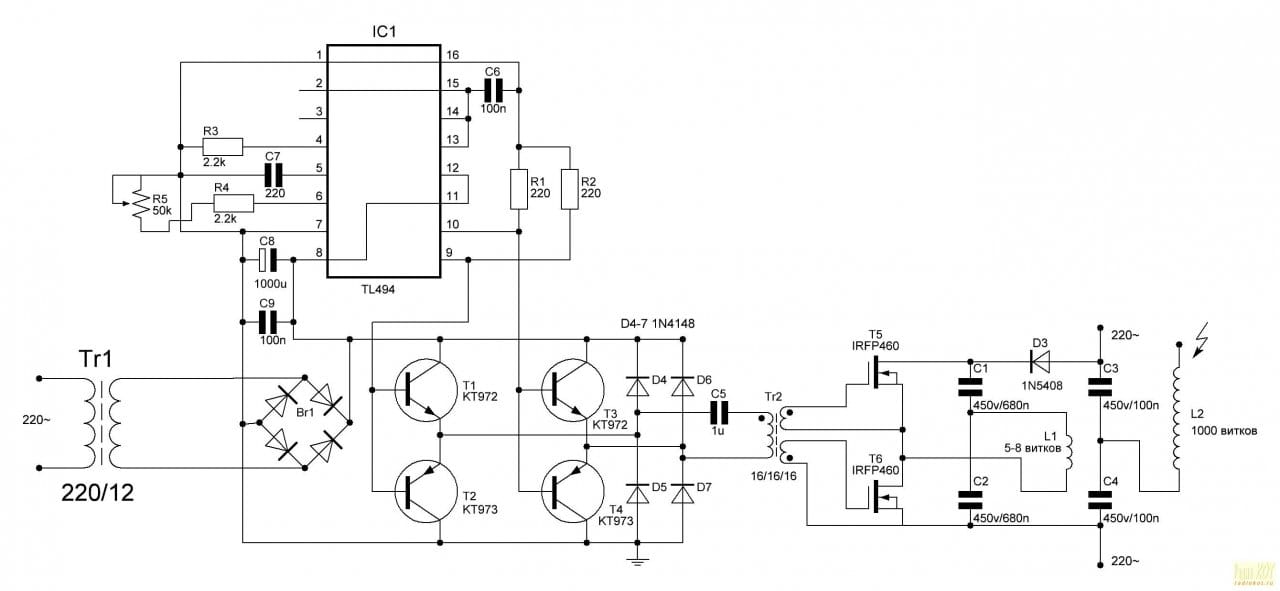 Сложные принципиальные схемы управления и преобразования позволяют снизить их надежность, а все остальные преимущественные стороны работы инверторов могут поспорить с соединительными работами во многих отраслях.
Сложные принципиальные схемы управления и преобразования позволяют снизить их надежность, а все остальные преимущественные стороны работы инверторов могут поспорить с соединительными работами во многих отраслях.
Структурная схема
Рисунок состоит из трех основных блоков:
- На входе схемы располагается выпрямитель с ёмкостью, которая подключена параллельно. Относительно роли конденсаторов схемы, то они служат в качестве накопителей, с помощью которых появляется возможность поднимать напряжение постоянного тока до показателя 300В;
- Модуля рассматриваемого аппарата, посредством которого постоянный ток преобразуется в высокочастотный переменный;
- Выходного выпрямительного блока, преобразующего переменный ток после аппарата в постоянный рабочий параметр.
Разные решения модульного блока, который имеют принципиальные схемы инвертора, становятся доступными для понимания благодаря всматриванию в предоставленные схемы.
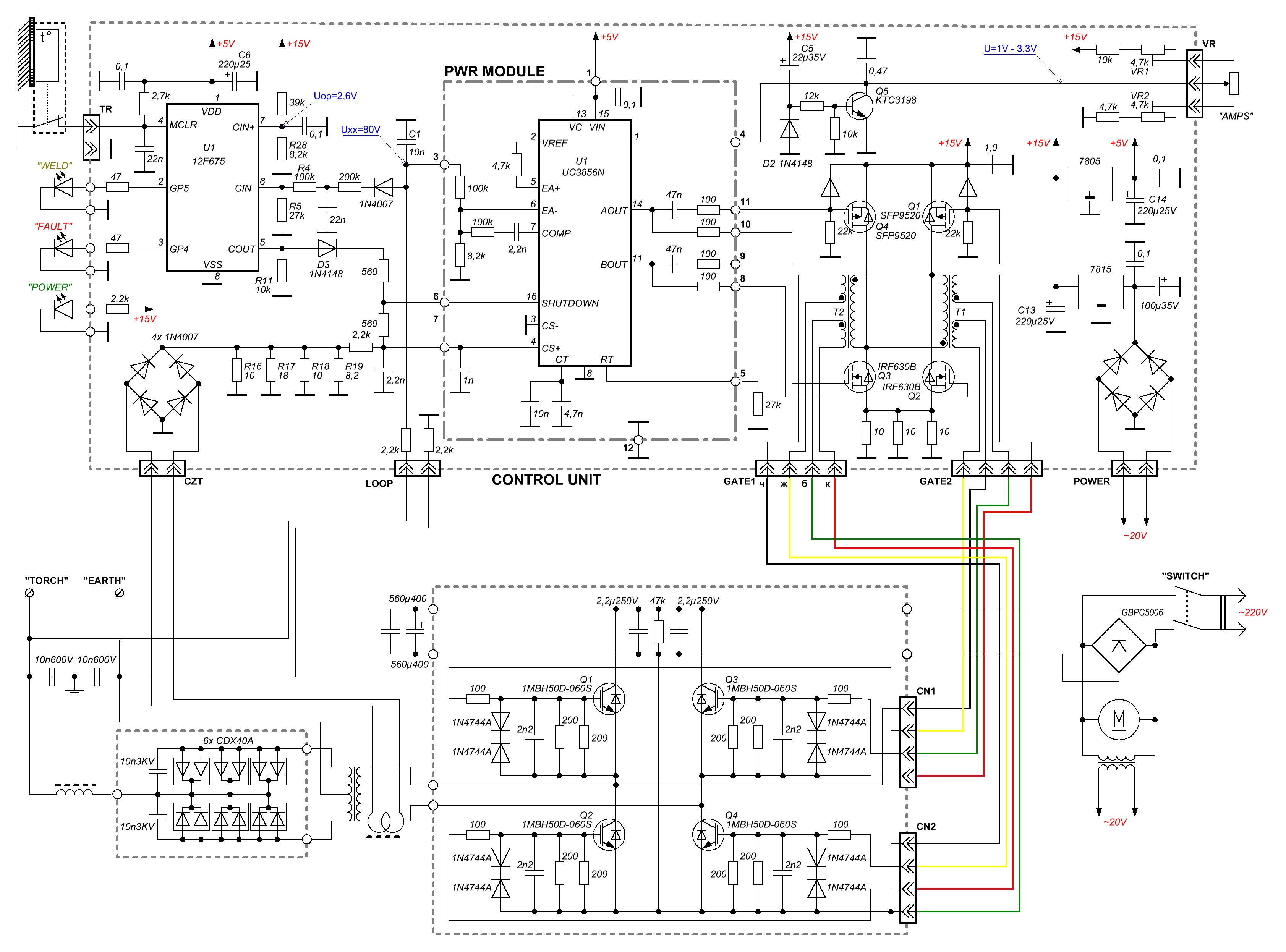
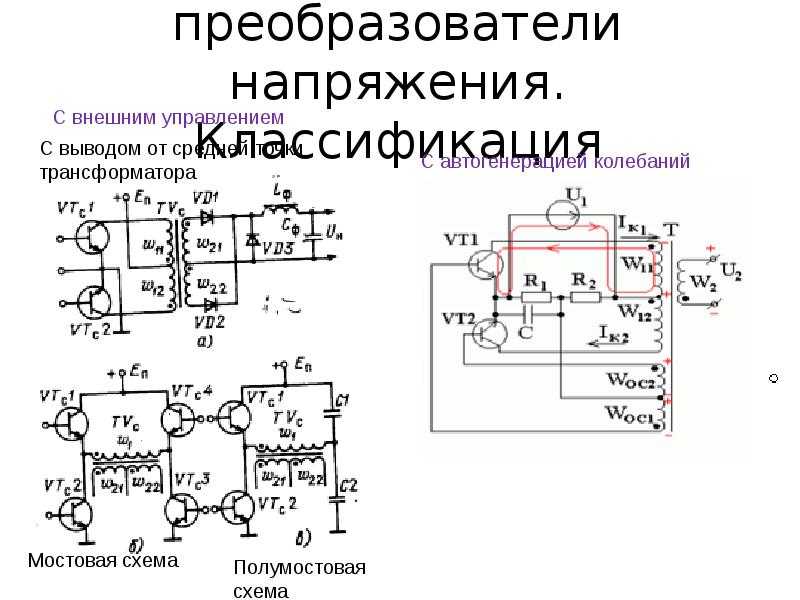
Двухконтактный модуль (мостовая схема — рис. 2)
Двухполярные импульсы в мостовом типе образуются за счет парной эксплуатации ключевых транзисторов (VT1-VT3; VT2-VT4), сквозь которые проходит половина тока от моста. Разумеется, показатель напряжения будет составлять половину от ёмкости «С».
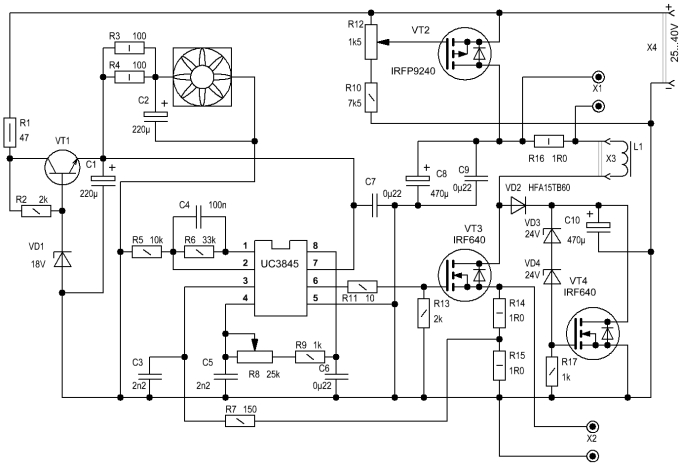
Двухконтактный модуль (полумостовая схема – рис. 3)
В этом случае полумостовой модуль снаряжен емкостным делителем на транзисторах, а также в первичной обмотке будет составлять 0,5 от значения на входе устройства. В результате этого при питании от выпрямителя на входе установки напряжение будет составлять 150В. Рисунок данной схемы при значительных рабочих токах используются мощные транзисторы. Потребление рабочего параметра сети повышено, если производить сравнение с полным мостом.
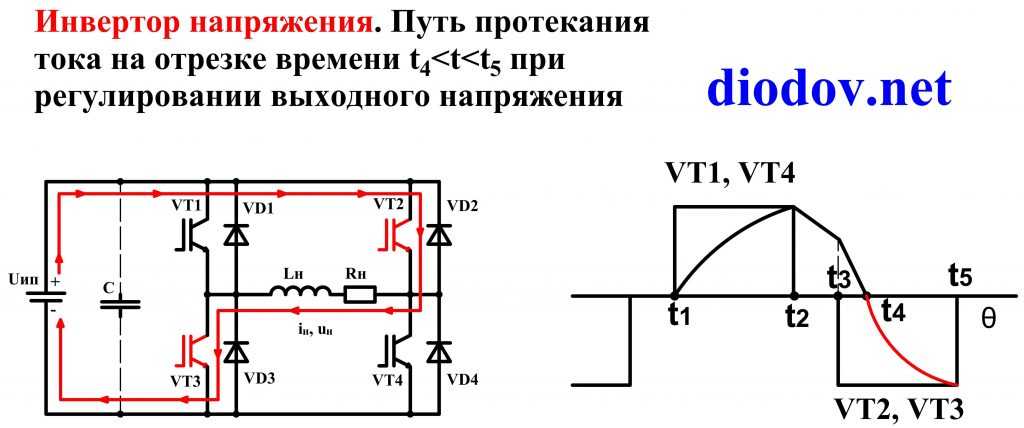
Инверторный модуль (косой полумост — 4)
На изображение данной схемы ключевые транзисторы VT1-VT2 функционируют одновременно на отпирании, а также запирание. Показатель напряжение в транзисторах не достигает 0,5 напряжения на входе. При закрытии транзисторов энергия поглощается конденсатором «С», расположенным на входе посредством диодов VD1-VD2. Однако среди недостатков «косого полумоста» стоит выделить особым образом подмагничивание стержня трансформатора путем использования составляющей константы рабочего параметра на выходе. Принципиальные схемы устройства и работы аппарата инверторного типа дают возможность максимально качественно понять, каким образом функционируют данные полезные установки.
Показатель напряжение в транзисторах не достигает 0,5 напряжения на входе. При закрытии транзисторов энергия поглощается конденсатором «С», расположенным на входе посредством диодов VD1-VD2. Однако среди недостатков «косого полумоста» стоит выделить особым образом подмагничивание стержня трансформатора путем использования составляющей константы рабочего параметра на выходе. Принципиальные схемы устройства и работы аппарата инверторного типа дают возможность максимально качественно понять, каким образом функционируют данные полезные установки.
Похожие статьи
- Какое приспособление сварочного аппарата в ответе за величину тока?
- Типы и схемы сварочных аппаратов инверторного типа
- Неисправности сварочного аппарата, делаем ремонт сами
- Виды диодов и принцип работы
Схема электрическая принципиальная Микроша Дон
Описание работы схемы электрической принципиальной сварочных инверторных аппаратов «МИКРОША»
При включении в сеть замыкаются 2 группы контактов
выключателя S1.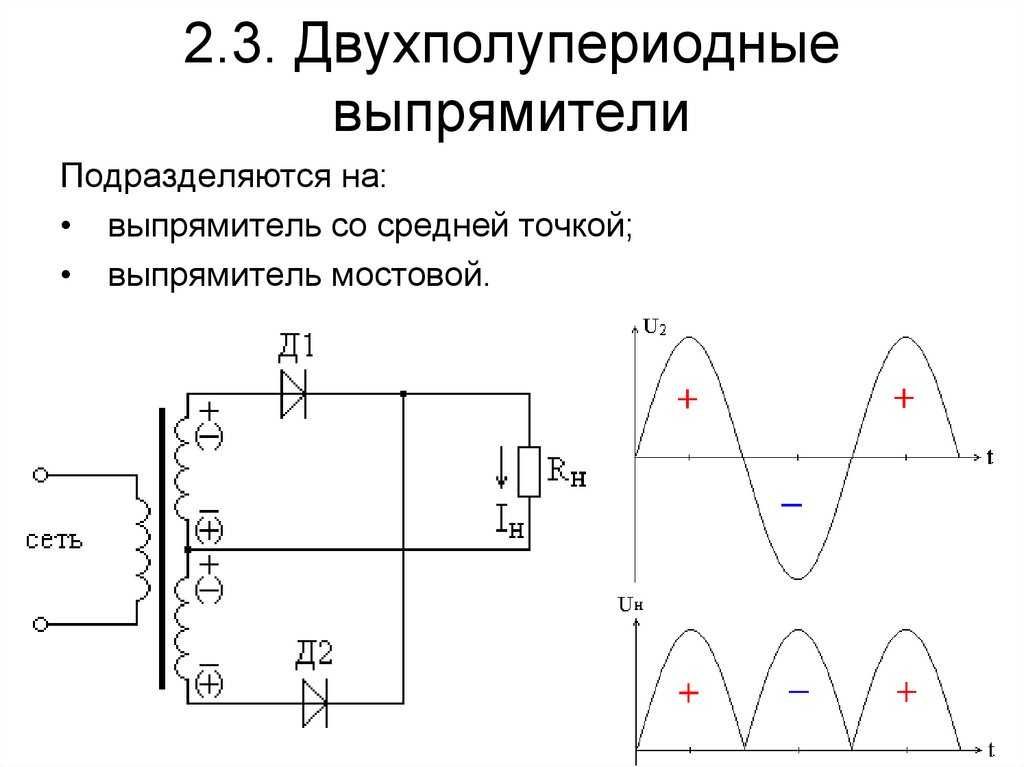 При этом S1.1 подключает напряжение питания к http://nashaelektronika.ru/files/Сзема%20ДОН-160М-240М_V3.JPGдиодному мосту
сетевого выпрямителя через конденсатор С7. На частоте 50 Гц конденсатор имеет
реактивное сопротивление несколько сотен Ом, что позволяет обеспечить плавную
зарядку электролитических конденсаторов сетевого фильтра. Цепь S1.2 включает
цепь питания реле. По мере зарядки конденсаторов цепи +300В, заряжается и
конденсатор временной задержки С13 через резисторы R44, R45, R50. При
достижении напряжения на нем уровня +2,5В управляемый стабилитрон VD15 открывается,
реле К1 срабатывает, шунтируя своими контактами С7.
При этом S1.1 подключает напряжение питания к http://nashaelektronika.ru/files/Сзема%20ДОН-160М-240М_V3.JPGдиодному мосту
сетевого выпрямителя через конденсатор С7. На частоте 50 Гц конденсатор имеет
реактивное сопротивление несколько сотен Ом, что позволяет обеспечить плавную
зарядку электролитических конденсаторов сетевого фильтра. Цепь S1.2 включает
цепь питания реле. По мере зарядки конденсаторов цепи +300В, заряжается и
конденсатор временной задержки С13 через резисторы R44, R45, R50. При
достижении напряжения на нем уровня +2,5В управляемый стабилитрон VD15 открывается,
реле К1 срабатывает, шунтируя своими контактами С7.
Блок питания +25,6В построен на ТОР258GN.
Представляет собой DC-DC преобразователь без гальванической развязки. Сумма
напряжений стабилитронов VD5 и внутреннего стабилитрона микросхемы 5,6В задает
величину выходного напряжения ( 5,6+20=25,6В ). Параллельно внутреннему
установлен защитный стабилитрон VD6. Кроме того VD16 защищает цепь
питания от непредвиденных ситуаций и при превышении уровня напряжения вызывает
срабатывание защиты микросхемы по току.
Кроме того VD16 защищает цепь
питания от непредвиденных ситуаций и при превышении уровня напряжения вызывает
срабатывание защиты микросхемы по току.
КОМПАРАТОРЫ ЗАЩИТ
М/сх IC2 — LM224D : ОУ2 выв.5,6,7 – на вывод 5
подается опорное напряжение 2,3В с делителя R5, R6. На инвертирующий вход 6 – с
делителя R3, R4. При нагреве радиатора диодов сопротивление терморезистора
уменьшается с ростом температуры. Когда величина напряжения этого делителя
уменьшается до уровня опорного, на выводе 7 появляется высокий уровень
напряжения, которое через резистор R39 поступает на светодиод «ПЕРЕГРЕВ» и на
аналоговый вход PIC контроллера (1). Через R37 это же напряжение поступает на
сумматор аварийных сигналов –ОУ3 (выв.8,9,10), с выхода 10 блокируя работу ШИМ
контроллера через транзистор VT6. Так же к ОУ2 (выв.5,6,7) подключены
транзисторы VT1, VT2. Первый открывается при аварии в цепи +300В, второй
открывается сигналом PIC контроллера при низком/высоком напряжении питания, что
вызывает ту же реакцию, что и нагрев терморезистора. Компаратор ОУ2(5,6,7)
обладает гистерезисом, смещая температурный порог обратного включения через
R24, VD7.
Компаратор ОУ2(5,6,7)
обладает гистерезисом, смещая температурный порог обратного включения через
R24, VD7.
ОУ1 выв. 1,2,3 – мониторит напряжение +25В. Опорное — R22, VD8, измеряемое – R20, R21. Пороги блокировки ШИМ контроллера по напряжению питания подобраны таким образом, что при включении аппарата, при возможности обеспечения амплитуды импульсов на затворах IGBT транзисторов уровнем +13,5В и выше, на выв.1 появляется лог.0. При снижении амплитуды напряжения менее 11,5В – лог.1, поступающая на сумматор ОУ3 (5,6,7), запрещая подачу питания на ШИМ контроллер IC4. Гистерезис обеспечивается цепью R34, VD17. Данная защита необходима транзисторам инвертора. При снижении амплитуды импульсов управления менее 10В возможен переход силовых транзисторов в линейный режим с большими потерями и как следствие – выход из строя с разрушением кристалла.
ОУ3 выв. 5,6,7 – компаратор-сумматор. При
появлении на входе 10 хотя бы одного сигнала: а) с термодатчика №1 через
R37, б) с компаратора питания через R35, в) с
термодатчика №2 через R40, вызывает появление напряжения высокого
уровня на выводе 8, которое запирает транзистор VT6, блокируя подачу питания ШИМ
контроллера.
Работа термодатчика №2 на IC3 ничем не отличается от описанного ранее №1. Он устанавливается на аппараты с ферритовыми сердечниками и настроен на температуру срабатывания по перегреву феррита 95-100 С. На модификациях с нанокристаллическими сердечниками он отсутствует.
ОУ4 выв. 12,13,14 – усилитель ошибки. Сигнал с трансформатора тока TV1 выпрямляется диодным мостом VD11-VD14, интегрируется цепью R23, C12 и через резистор R38 подается на инвертирующий вход 13 ОУ. На его неинвертирующий вход приходит напряжение задания величиной от 0В до +5В с резистора регулировки тока сварки R88. Величина проинтегрированного напряжения с ТТ имеет аналогичный порядок. Напряжение управления с вывода 14 IC2 через делитель/интегратор R54, R63, C24 поступает на вывод 2 IC4 ШИМ контроллера для регулировки тока по среднему значению. R32, C14 – цепь коррекции.
IC4 – SG2525AP – двухтактный ШИМ контроллер. Рабочая частота для ферритовых сердечников в моделях 160, 180 – 60 кГц. Для
нанокристаллических – 42 кГц. Для моделей 200 и 220 – 42 кГц для любых
сердечников. Стандартное включение. Цепи коррекции. Выходные сигналы
усиливаются транзисторными сборками IC5, IC6 для раскачки трансформатора
гальванической развязки ( ТГР ). На выходах ТГР – предусилители-корректоры
(драйвера) выполнены по схеме с отрицательным смещением в паузе. На затворы
силовых транзисторов подается сигнал, имеющий в импульсе амплитуду +15В, в
паузе -2,7В. Отрицательное смещение необходимо для защиты от приоткрывания
транзистора противоположного плеча от случайных наводок и флюктуаций.
Рабочая частота для ферритовых сердечников в моделях 160, 180 – 60 кГц. Для
нанокристаллических – 42 кГц. Для моделей 200 и 220 – 42 кГц для любых
сердечников. Стандартное включение. Цепи коррекции. Выходные сигналы
усиливаются транзисторными сборками IC5, IC6 для раскачки трансформатора
гальванической развязки ( ТГР ). На выходах ТГР – предусилители-корректоры
(драйвера) выполнены по схеме с отрицательным смещением в паузе. На затворы
силовых транзисторов подается сигнал, имеющий в импульсе амплитуду +15В, в
паузе -2,7В. Отрицательное смещение необходимо для защиты от приоткрывания
транзистора противоположного плеча от случайных наводок и флюктуаций.
Силовая часть – полумостовой
квазирезонансный преобразователь. Частота коммутации выше резонансной частоты,
образованной контуром С44, 45, 46, 47, 50, 51 совместно с индуктивностью
рассеяния трансформатора, в связи с чем форма вершины импульса тока имеет
несколько колоколообразный, закругленный вид и ток выключения транзистора не
превышает его тока включения, не взирая на отсутствие выходного дросселя. Силовой трансформатор имеет соотношение витков 14/6=2,33 что позволяет работать
при низком напряжении в электросети. Для 200-220 модификаций с ферритовыми
сердечниками 16/7=2,28, с нанокристаллическими для всех моделей –
11/5=2,2.
Силовой трансформатор имеет соотношение витков 14/6=2,33 что позволяет работать
при низком напряжении в электросети. Для 200-220 модификаций с ферритовыми
сердечниками 16/7=2,28, с нанокристаллическими для всех моделей –
11/5=2,2.
Защита от приваривания электрода. При наличии дуги на выходе – напряжение на С49 всегда будет более 18В. Оптрон ОС3 открыт. Напряжение задания с R88 поступает на усилитель ошибки IC2 (выв.12). При КЗ на выходе С49 разряжается через R114,115,116 в течении 0,5-0,8 сек. Далее оптрон закрывается и напряжение задания падает до минимально возможного значения.
Регулировка тока и форсажа
производится переменными резисторами R88, R91. При горящей дуге выходное
напряжение составляет не менее 18В. При дуговой сварке покрытым электродом дуга
при меньшем значении напряжения существует кратковременно и стремится
потухнуть. Выходное напряжение интегрируется цепью R96, R97, R111, C65. При его
штатном значении стабилитрон VD34 открыт, транзистор оптрона ОС2 так же открыт,
шунтируя переменный резистор «форсаж». При значениях выходного напряжения, стремящихся
к КЗ, т.е. менее 18В, стабилитрон закрывается, транзистор оптрона так же
закрывается и резистор R91 подключается в цепь задания тока, увеличивая его на
заданную величину. Это же значение поступает на второй аналоговый вход
процессора – выв. 3 платы индикации. Контроллер индицирует изменяющиеся
значения тока уставки.
При его
штатном значении стабилитрон VD34 открыт, транзистор оптрона ОС2 так же открыт,
шунтируя переменный резистор «форсаж». При значениях выходного напряжения, стремящихся
к КЗ, т.е. менее 18В, стабилитрон закрывается, транзистор оптрона так же
закрывается и резистор R91 подключается в цепь задания тока, увеличивая его на
заданную величину. Это же значение поступает на второй аналоговый вход
процессора – выв. 3 платы индикации. Контроллер индицирует изменяющиеся
значения тока уставки.
Ограничение выходной мощности
осуществляется оптроном ОС1. Вызвано необходимостью снижения выходной и
потребляемой мощности при значительном, нештатном растягивании дуги, либо при
тестировании оборудования с помощью балластного реостата на большом, не соответствующем
ГОСТ значении сопротивления нагрузки. Т.к. аппараты имеют большой запас по Ктр
силового трансформатора и соответственно по возможности ШИМ регулирования, то
могут тянуть дугу, например модели 200 и 220 до 40В при 200А.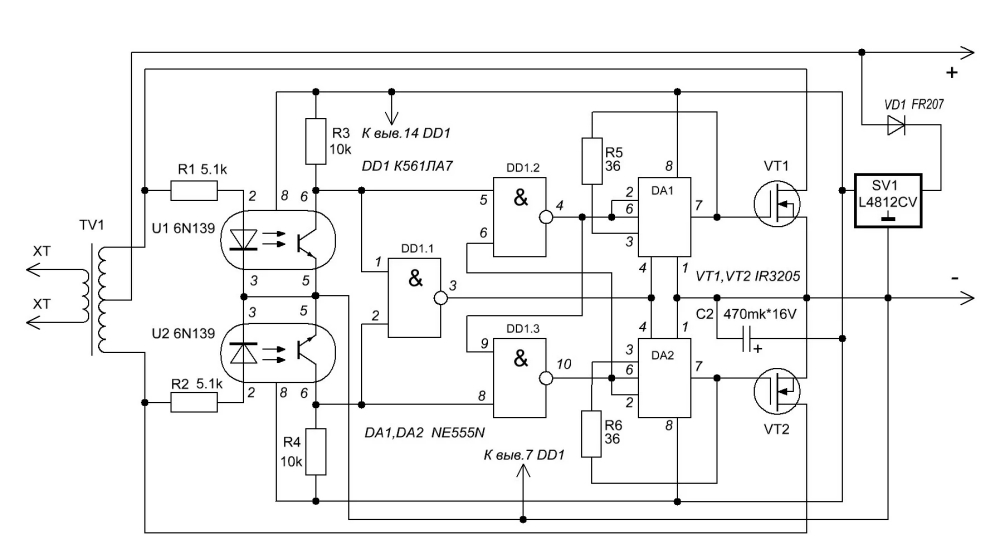 Это вызывает
перегрузку диодных мостов, эл. конденсаторов и т.д. Делитель R87, R89 подобран
таким образом, что для моделей 160, 180 ограничение начинается при превышении
напряжением значения 27,5В, для 200, 220 – 30В. При достижении этих значений,
открывается управляемый стабилитрон VD26, транзистор оптрона ОС1 открывается,
подключая делитель R66, R67 к напряжению задания. Ток уменьшается.
Это вызывает
перегрузку диодных мостов, эл. конденсаторов и т.д. Делитель R87, R89 подобран
таким образом, что для моделей 160, 180 ограничение начинается при превышении
напряжением значения 27,5В, для 200, 220 – 30В. При достижении этих значений,
открывается управляемый стабилитрон VD26, транзистор оптрона ОС1 открывается,
подключая делитель R66, R67 к напряжению задания. Ток уменьшается.
Измерение напряжения электросети . По цепи делителя VD39, C37, R95, R101, R102, через LC фильтр L2, C55 измеряемое напряжение подается на выв.2 платы индикации и поступает на первый аналоговый вход контроллера PIC18F14K22. Процессор периодически выводит значение напряжения на индикатор, сменяя значение тока уставки.
Плата индикации. Программа прошивается и
проверяется до установки в основную плату. Задействованы оба АЦП и один
цифровой вход процессора. При поступлении сигнала «ПЕРЕГРЕВ», либо значения
напряжения сети менее 85 и более 265 вольт, выдается сигнал блокировки
работы с вывода 7 платы, который поступает через резистор R49 на базу
транзистора VT2, вызывая по цепям ОУ блокировку ШИМ контроллера. Возможна только калибровка по напряжению сети. Для этого необходимо при
выключенном аппарате замкнуть «джампером»(перемычкой) двухштыревой разъем на
плате индикации. Установить с ЛАТРа сетевое напряжение 220 вольт. Включить
аппарат. При этом на индикатор будет выводиться мигающее значение 220.
Контроллер измеряет, усредняет и запоминает это напряжение, как эталонное, в
течение некоторого времени. Для ранних моделей – 30 сек, для более поздних – 10
сек. Затем значение цифр сменяется на мигающие 100. Необходимо уменьшить
напряжение питания с ЛАТРа до величины 100 вольт, затем снять «джампер». После
этого процессор начнет запоминать эталонный уровень 100 вольт. По окончании
«мигания» необходимо выключить аппарат. После повторного включения снизить
напряжение сети до 85 вольт. Должна сработать блокировка, засветится светодиод
«перегрев» и на более поздних моделях на семисегментном цифровом индикаторе
бегущей строкой появится сообщение «НАПР.
Возможна только калибровка по напряжению сети. Для этого необходимо при
выключенном аппарате замкнуть «джампером»(перемычкой) двухштыревой разъем на
плате индикации. Установить с ЛАТРа сетевое напряжение 220 вольт. Включить
аппарат. При этом на индикатор будет выводиться мигающее значение 220.
Контроллер измеряет, усредняет и запоминает это напряжение, как эталонное, в
течение некоторого времени. Для ранних моделей – 30 сек, для более поздних – 10
сек. Затем значение цифр сменяется на мигающие 100. Необходимо уменьшить
напряжение питания с ЛАТРа до величины 100 вольт, затем снять «джампер». После
этого процессор начнет запоминать эталонный уровень 100 вольт. По окончании
«мигания» необходимо выключить аппарат. После повторного включения снизить
напряжение сети до 85 вольт. Должна сработать блокировка, засветится светодиод
«перегрев» и на более поздних моделях на семисегментном цифровом индикаторе
бегущей строкой появится сообщение «НАПР. СЛАБОЕ» и мигающие цифры 85.
Проверить обратное включение при напряжении 90 вольт. Аналогично протестировать
аппарат при напряжении 265В – блокировка и появление надписи «НАПР. ОГО-ГО»,
«265». При 260В – снятие блокировки. Далее замкнуть любой терморезистор
проволочной перемычкой. Блокировка и появление надписи «ПЕРЕГРЕВ 100 С».
Лексическая бедность сообщений вызвана невозможностью отображения на цифровом
индикаторе большинства букв русского алфавита.
СЛАБОЕ» и мигающие цифры 85.
Проверить обратное включение при напряжении 90 вольт. Аналогично протестировать
аппарат при напряжении 265В – блокировка и появление надписи «НАПР. ОГО-ГО»,
«265». При 260В – снятие блокировки. Далее замкнуть любой терморезистор
проволочной перемычкой. Блокировка и появление надписи «ПЕРЕГРЕВ 100 С».
Лексическая бедность сообщений вызвана невозможностью отображения на цифровом
индикаторе большинства букв русского алфавита.
РЕМОНТ
При проверке работы схемы управления от блока питания, без подачи высокого напряжения, подать +24-25В в схему, подпаявшись, например к VD16. Предварительно необходимо заблокировать защиту от пониженного напряжения электросети, для чего замкнуть проволочной перемычкой резистор R26. В 3 версии соединить С35 с шиной питания +25,6В перемычкой, обойдя защиты, т.е. замкнуть между собой коллектор и эмиттер транзистора VT6.
Проверить осциллографом наличие импульсов +15,
-3В на затворах транзисторов FGh50N60SMD.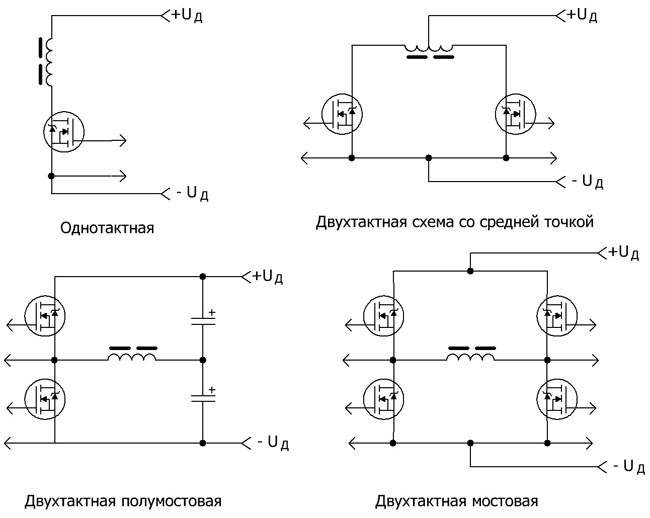 ( IGW75N65H5 – Infineon ).
( IGW75N65H5 – Infineon ).
ВНИМАНИЕ ! Нельзя менять местами провода, идущие с сетевого выключателя S1.1, S1.2. Одна группа контактов коммутирует напряжение сети. Другая, напряжение питания реле. При попадании напряжения сети в цепь питания реле, как минимум придется заменить VD15, VD16. На ранних моделях применялся выключатель большего размера для коммутации полного тока, потребляемого от сети. Данные выключатели показали свою крайнюю ненадежность, в связи с чем и была произведена модернизация с изменением цепей коммутации.
НЕИСПРАВНОСТИ
1. Ток не регулируется. На индикаторе значение 00. Поломка переменного резистора регулировки в результате фронтального удара. Заменить резистор 10 кОм .
В моделях выпуска с февраля 2015 г. резисторы заменены
на другие, с дополнительным креплением к плате. Печатная плата изменена. Крышка
корпуса удлинена на 5 мм для дополнительной защиты регуляторов.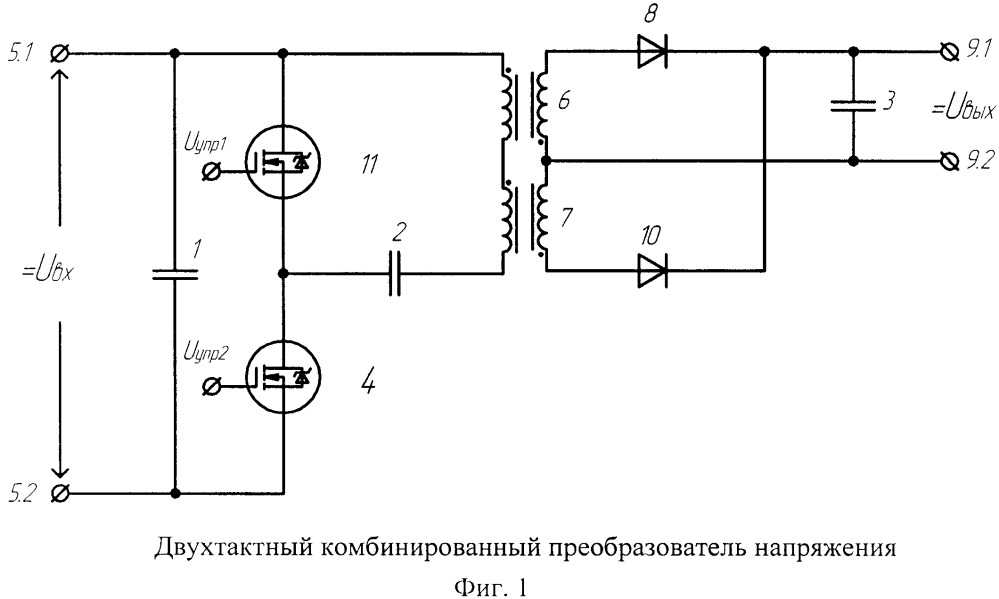
2. Вращение регулятора «ФОРСАЖ» изменяет значение тока. Ток при попытке сварки минимален, сварка невозможна. Повышенное напряжение холостого хода +95_+115В. Причина — отсутствует контакт выхода + с диодом VD37. Осуществляется через заклепку на радиатор крепления диодов VD35, VD36. Устранение неисправности — припаять провод к диоду VD37, другой конец к выходной клемме +. На последних моделях провод добавлен штатно, дублируя контакт через заклепку.
Аналогично проверить контакт минусового провода на оптроны ОС2, ОС3.
3. Блок питания делает попытки запуска и уходит в
защиту. Либо при напряжении от ЛАТР 80 – 230 В запускается штатно, а при подаче
напряжения сети 230-250В начинает «икать» или запускается, а через некоторое
время снова уходит в защиту. Причина – повышенное потребление тока схемой
управления и вентиляторами. Разрядив сетевые электролиты, подать напряжение от
лабораторного блока питания, зашунтировав R26. В 3 версии соединить С35 с шиной
питания +25,6В перемычкой, обойдя защиты. Проверить осциллограммы на
затворах. Проверить потребление тока от лабораторного БП. Оно не должно
превышать величину 1 ампер. При повышенном потреблении тока отпаять по очереди
выводы вентиляторов и проверить потребление тока каждым от лабораторного БП.
Неисправный заменить. Мощность и потребление тока снизится и м/сх TOP258GN
перестанет уходить в защиту. Изменить порог защиты по току в данной м/сх
невозможно.
В 3 версии соединить С35 с шиной
питания +25,6В перемычкой, обойдя защиты. Проверить осциллограммы на
затворах. Проверить потребление тока от лабораторного БП. Оно не должно
превышать величину 1 ампер. При повышенном потреблении тока отпаять по очереди
выводы вентиляторов и проверить потребление тока каждым от лабораторного БП.
Неисправный заменить. Мощность и потребление тока снизится и м/сх TOP258GN
перестанет уходить в защиту. Изменить порог защиты по току в данной м/сх
невозможно.
4. Выход из строя силовых транзисторов в результате попадания влаги, грязи и т.д. пояснений для опытных мастеров не требует. Замена сложности не представляет. Необходимо зачистить от лака радиатор по краю места посадки транзисторов. Проверить исправность стабилитронов в драйверах, затворных резисторов. Подать питание от БП, как описано ранее и проверить осциллограммы.
5. Выход из строя диодного моста GBPC3508W.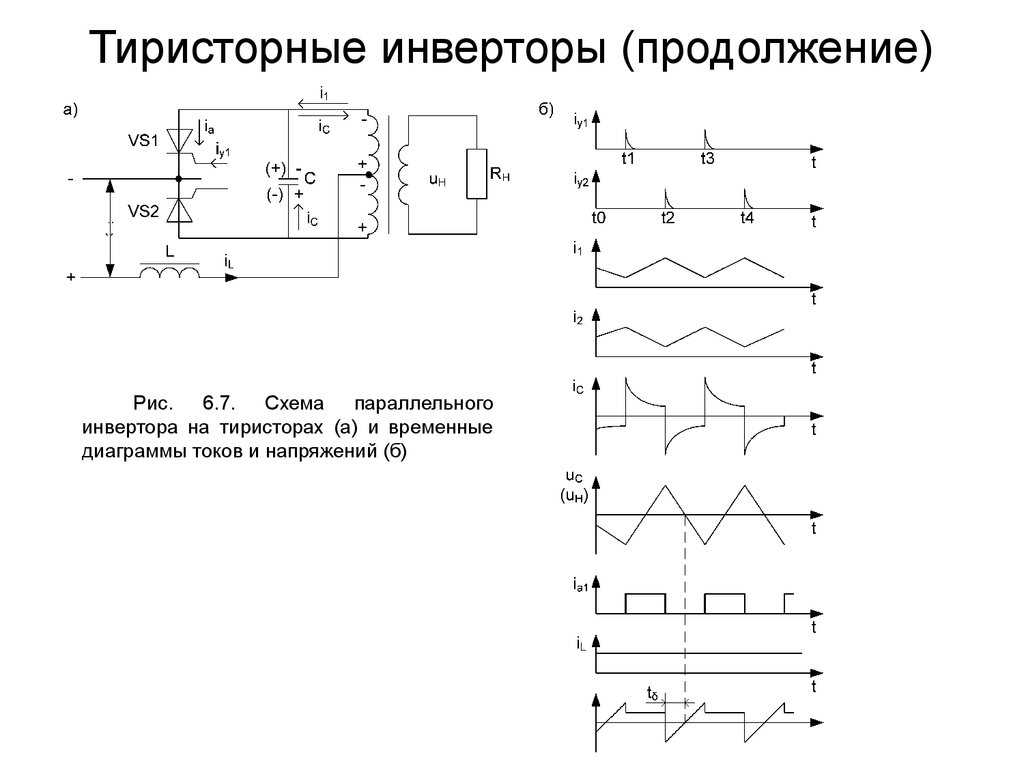 Аппарат
молчит. Все напряжение сети приложено к конденсатору С7. Его реактивное
сопротивление позволяет аппарату находиться в таком положении сколь угодно
долго. Прозвонить мост. Заменить.
Аппарат
молчит. Все напряжение сети приложено к конденсатору С7. Его реактивное
сопротивление позволяет аппарату находиться в таком положении сколь угодно
долго. Прозвонить мост. Заменить.
6. Постоянно светится «ПЕРЕГРЕВ»: а)Пробой конденсатора С4 или С5, параллельных терморезистору из-за наводок. Прозвонить Заменить на 0,1 мкфх100В размер СМД 1206, либо выводной.
б) Выход из строя VD15 – TL431, реле не включается. Следует так же проверить защитный диод реле VD1, и защитный резистор R84.
7. Реле включается, вентиляторы работают, на электролитах +310В, но пишет: НАПР СЕТИ СЛАБОЕ. Измерить напряжение на выводе №2 платы индикации. Должно быть 3,2 В +- 0,2В. При отсутствии оного проверить на пробой цепь VD39, C37, R95, R101, R102, L2.
Если напряжение присутствует, проверить на плате
индикации его наличие после R4, на 18 ноге процессора. Если неисправен R4,
заменить на любой, сопротивлением 100-200 Ом.
8. Индикатор мигает, отображаемые цифры «999» — Сбой памяти контроллера. Необходимо перекалибровать по напряжению сети, как описано выше, в описании платы индикации.
Принцип работы схемы аппаратов 200 и 220 ампер аналогичен. Нумерация компонентов сохранена.
С уважением, инженер-конструктор
Малик Э. В.
Схемы оборудования
Схема ДОН-140-180
Схема ДОН-200-240
Схема ДОН-160М-240М
Схема ДОН-160М-240М_V3
Схема ДОН-260ПНЦ
Схема КВАРК-160-220
Схема МИКРОША-160-180_V1
Схема МИКРОША-160-180_V3
Схема МИКРОША-200-220_V1
Схема Микроша-200-220-V3
Схема-ДОН-150
Схема-ДОН-200
ЭПРА для люминесцентных лам: что это такое и как работает, схема подключения
В офисах, производственных цехах, поликлиниках в освещении используют люминесцентные лампы. Они достаточно экономичные, долговечные, светят ровным не напрягающим глаза светом. Однако напрямую к сети их не подключают. Лампа работает при определенных условиях подачи тока. Их обеспечивает пускорегулирующая аппаратура. В статье разберем ее устройство, принцип работы и возможные неисправности.
Однако напрямую к сети их не подключают. Лампа работает при определенных условиях подачи тока. Их обеспечивает пускорегулирующая аппаратура. В статье разберем ее устройство, принцип работы и возможные неисправности.
Для того чтобы люминесцентная лампа загорелась, ей нужно специальное устройство-переходник. Оно состоит из:
- дросселя — выравнивает пульсацию;
- стартера — запускает процесс;
- конденсатора — стабилизирует напряжение.
Первоначально все эти элементы располагались отдельно. Хотя срок службы ламп увеличивался, переходник сильно нагревался. Слышалось неприятное гудение, свет иногда мерцал. Небольшое электронное устройство — ЭПРА полностью заменяет устаревший переходник. Монтируется напрямую к лампам. Правила техники безопасности обязывают устанавливать в помещениях, где работают люди, лампы с блоком ЭПРА, а не устаревшим ПРА.
Конструкция ЭПРА:
- фильтр электромагнитных помех — устраняет помехи электросети;
- выпрямитель — преобразует переменный ток в постоянный;
- сглаживающий фильтр — снижает частоту пульсации;
- инвертор — увеличивает напряжение до оптимального значения;
- дроссель.
Колба люминесцентной лампы наполнена парами ртути. Внутреннюю поверхность покрывают люминофором. На пары подается разряд, он вызывает УФ-свечение. ЭПРА работает в три этапа:
- Электроды в лампе разогреваются.
- Устройство генерирует импульс высокого напряжения. Он вызывает пробой газа.
- Уровень напряжения на электродах обеспечивает постоянное горение лампы.
- Работа люминесцентных ламп обычно сопровождается неприятным для глаз мерцанием. Это так называемый эффект «стробирования». ЭПРА этот эффект нивелирует.
- Многократные мигания перед постоянным свечением — это фальстарт. Стартер выходит из строя, нити накала тоже страдают. При использовании электронной ПРА такого явления нет. Лампы будут работать дольше.
- Ряд устройств дополняют регулятором, с помощью которого устанавливается яркость освещения.
- Стабильный уровень освещения достигается за счет широкого диапазона питающего напряжения.
ЭПРА подключают по мостовой и полумостовой схеме. В первом варианте схемы больше составляющих (полевые и биполярные транзисторы). Используется в лампах с огромными мощностями.
В первом варианте схемы больше составляющих (полевые и биполярные транзисторы). Используется в лампах с огромными мощностями.
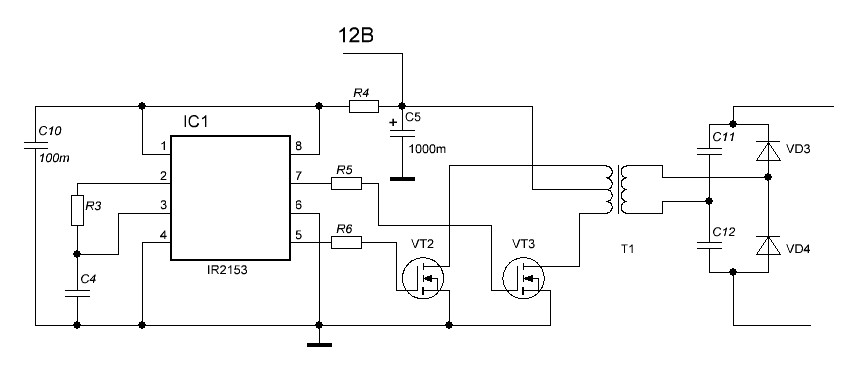
Чаще встречается полумостовая схема. У нее ниже КПД. Инвертор строится по принципу автогенератора с положительной обратной связью. Низкий коэффициент полезного действия компенсируется с помощью специальных микросхем.
Инвертор в ЭПРА небольшой мощности — двухтактный преобразователь напряжения. Диодный мост выпрямляет напряжение сети. Фильтрующий конденсатор его сглаживает. Инвертор выполнен на 2-х транзисторах. Они переводят постоянное напряжение в высокочастотное.
Трансформатор — управляющий элемент преобразователя. У него три обмотки:
- две для открытия транзисторных ключей;
- третья — первичная обмотка обратной связи транзисторного автогенератора.
Динистор отвечает за запуск преобразователя. Он открывается, когда напряжение превышает норму. Импульс запускает преобразователь. Напряжение с обмотки транзистора последовательно передается на нити накала. Они разогреваются. А напряжение на конденсаторе зажигает источник света.
Они разогреваются. А напряжение на конденсаторе зажигает источник света.
После запуска частота преобразователя постоянна. Он будет работать в автоматическом режиме.
Лампа не горит по разным причинам. Самая очевидная — оборвалась нить накаливания. Обычно говорят, что она «перегорела». В этом случае ЭПРА исправна, надо просто поставить новую лампу.
Точки пайки на плате — уязвимые места. Переходник постепенно остывает после того, как светильник включен. Температурные колебания могут повредить пайку. Повреждения на плате обычно темного цвета. Эта неисправность устраняется чисткой или подпайкой поврежденных участков.
В плохую погоду часто в сети бывают скачки напряжения. В конструкции ЭПРА не предусмотрены варисторы. Поэтому при скачке электроэнергии транзистор выходит из строя. Можно дополнительно установить предохранитель. Он срабатывает, если элементы схемы будут повреждены.
Производители печатают последовательность подключения ЭПРА на коробках. Там указаны номера клемм для входного и выходного контуров.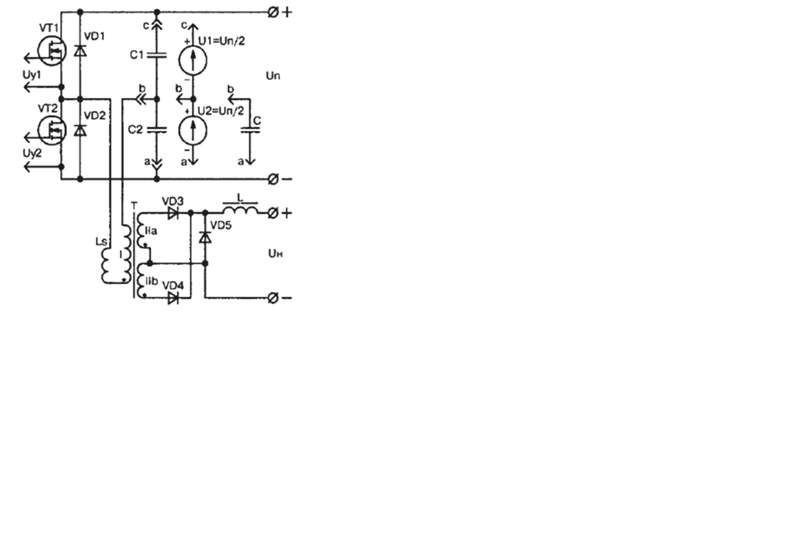 Если схему нарушить, то устройство работать не будет. При самостоятельной установке строго следуйте инструкции.
Если схему нарушить, то устройство работать не будет. При самостоятельной установке строго следуйте инструкции.
Для светодиодных и галогенных светильников тоже производят пускорегулирующую аппаратуру. Надо понимать, что ЭПРА для люминесцентной лампы не подойдет для галогенного светильника и наоборот.
- Комфорт для людей в помещении. Светильники не мигают, не гудят. Свечение ровное, приятное для глаз. Отсутствие стробоскопического эффекта. Ламповый ток не зависит от частоты сети, так как среднее значение плотности электронов поддерживается высокочастотным режимом.
- Срок службы увеличивается за счет предварительного нагрева нитей накаливания. А запуск без фальстарта предохраняет стартер от поломок.
- Безопасность использования. Устройство не перегревается. При любых неисправностях сработает предохранительное отключение.
- Светильники с ЭПРА приблизительно на четверть экономичнее, чем с устаревшими ПРА. Световой поток при этом больше на пять-семь процентов.

- Интенсивность светового потока можно регулировать. Для этого предусмотрены автоматический и ручной режимы.
Таким образом, лампы с переходниками ЭПРА не только работают дольше, но и соответствуют нормам безопасности и энергоэффективности.
В нашем каталоге есть устройства разных видов:
- EEI=А1 — мощность регулируется при помощи корректора;
- EEI=А2 — постоянная мощность;
- EEI=А3 — корректор пассивный или отсутствует.
Менеджеры помогут подобрать нужные вам устройства среди разнообразия пускорегулирующих аппаратов для разных типов ламп, сетей и условий эксплуатации. Связаться можно по телефону или через форму обратной связи на сайте.
Устройство для беспроводной зарядки аккумуляторных батарей БПЛА
Зазулин Ярослав
Карпунин Павел
Киреев Константин
№ 2’2019
PDF версия
Расширение возможностей применения беспилотных летательных аппаратов (БПЛА) приводит к повышению требований к продолжительности их автономной работы — с целью увеличения максимального времени нахождения в полете при удаленности от базовой станции. Решить эту задачу возможно либо увеличением емкости аккумуляторных батарей (АКБ) на бортах БПЛА, либо подзарядкой источников питания во время работы, без возвращения на базовую станцию. На данном этапе технологического развития повышение емкости аккумуляторов влечет за собой неизбежное увеличение их габаритных размеров и массы, что не всегда целесообразно, принимая во внимание специфику работы БПЛА. Исходя из этого в статье предложен вариант беспроводного зарядного устройства, которое позволит расширить время автономной работы.
Решить эту задачу возможно либо увеличением емкости аккумуляторных батарей (АКБ) на бортах БПЛА, либо подзарядкой источников питания во время работы, без возвращения на базовую станцию. На данном этапе технологического развития повышение емкости аккумуляторов влечет за собой неизбежное увеличение их габаритных размеров и массы, что не всегда целесообразно, принимая во внимание специфику работы БПЛА. Исходя из этого в статье предложен вариант беспроводного зарядного устройства, которое позволит расширить время автономной работы.
Технология бесконтактной приема-передачи электрической энергии позволяет осуществлять питание различных устройств от источника переменного сигнала через слой диэлектрика без использования гальванической связи. В таких системах для осуществления передачи энергии от источника к приемнику применяется явление электромагнитной индукции [1–4].
Для обеспечения работы подобной системы технически требуется наличие трех основных элементов: передатчика, канала связи и приемника. В передатчике осуществляется преобразование энергии постоянного электромагнитного поля от источника питания в форму изменяющегося во времени (чаще всего по гармоническому закону) электромагнитного сигнала, который может распространяться по каналу связи. В его качестве зачастую выступает воздушное пространство. На приемной стороне происходит прием излучаемой передатчиком энергии и преобразование ее в энергию постоянного электромагнитного поля для дальнейшей подачи на аккумуляторную батарею БПЛА.
На основе изложенных особенной построения подобных систем разработана структурная схема устройства беспроводной передачи энергии (рис. 1), состоящего из двух основных частей: передающего и приемного блоков.
Рис. 1. Разработанная структурная схема устройства
В состав передатчика входят источник питания, генератор тактовых импульсов, полумостовая транзисторная схема и ее драйвер, передающая катушка индуктивности. В составе приемника имеются приемная катушка, выпрямитель сигнала, фильтрующий элемент, стабилизатор напряжения, нагрузочный элемент.
Рис. 2. Схема электрическая принципиальная передающего устройства
На основе этого были разработаны принципиальные электрические схемы передающего (рис. 2) и приемного (рис. 3) устройств.
Рис. 3. Схема электрическая принципиальная приемного устройства
Рассмотрим подробнее принцип работы передающего устройства и опишем его функциональные узлы.
В качестве источника питания выступает источник постоянного напряжения +24 В, мощностью 100 Вт. Энергия этого источника используется для работы микросхем тактового генератора и полумостового драйвера. Также в нагрузке данного источника предусмотрена полумостовая транзисторная схема, преобразующая постоянный сигнал в переменный для его последующего передачу в приемное устройство.
Тактовый генератор и полумостовой драйвер, реализованные на микросхемах TL494ID и IR2113S соответственно, управляют поочередным переходом транзисторов в полумостовой схеме из закрытого состояния в открытое и обратно. Обвязка микросхемы тактового генератора выбрана с учетом необходимости получения на его выходах двух последовательностей не перекрывающих друг друга прямоугольных импульсов частотой 100 кГц [5].
Основой полумостового драйвера выбрана микросхема IR2113S, чья функция заключается в управлении полупроводниковым модулем (в нашем случае полумостовым транзисторным преобразователем) и осуществлении защитных функций. Главной задачей, решаемой схемой управления затвором, является согласование уровней импульсов, вырабатываемых контроллером, с сигналами управления входами силовых ключей.
Преобразование энергии постоянного сигнала в переменный осуществляется с помощью полумостового преобразователя на транзисторах IRF540N. Принцип действия полумостового преобразователя заключается в следующем: в то время, пока открыт транзистор VT1, ток протекает условно в «положительном» направлении через нагрузку (катушку индуктивности). Транзистор VT2 в данный момент остается закрытым. Однако после того как на затвор транзистора VT2 приходит управляющий импульс, который его открывает (сигнал на затворе VT1 отсутствует), ток через нагрузку протекает в обратном направлении (условно «отрицательном»). Так энергия от источника постоянного напряжения преобразуется в периодически изменяющийся во времени сигнал. При этом важной особенностью в построении таких схем является учет так называемого мертвого времени. Это термин подразумевает интервал времени между тактовыми импульсами, которые переводят транзисторы в открытое состояние. Если импульсы будут следовать один за другим, возможна некорректная работа схемы [6].
Далее переменный сигнал поступает на катушку индуктивности, которая выступает в качестве передающей антенны.
На входе приемного устройства расположена катушка индуктивности, которая служит приемной антенной.
Выпрямление принятого переменного сигнала выполняется диодами 30BQ100, включенными по схеме мостового выпрямителя. Далее расположены конденсаторы, которые фильтруют возможные высокочастотные импульсы. Светодиод VD9 используется для индикации наличия сигнала.
С конденсаторов сигнал подается на стабилизатор тока/напряжения. Он позволяет получать на своем выходе постоянный сигнал напряжением 5 В мощностью 7,5 Вт. При этом в данном стабилизаторе заложена возможность регуляции напряжения и тока. Напряжение, возникающее на резисторах R8, R9, равно примерно 1 В. Такое схемотехническое решение связано в первую очередь с относительно большой мощностью (ток, протекающий через них, равен 2 А). С помощью резисторов R1 и R5 регулируется установочные ток и напряжение соответственно. Если выходное напряжение превышает установочное, то сигнал начинает протекать через диод VD8, если же ток увеличивает уставку, то сигнал начинает протекать через диод VD7. Подобная схема позволяет реализовать двойную защиту: по току и по напряжению.
Моделирование работы электрической схемы
Правильность функционирования разработанной электрической схемы устройства можно проверить в среде моделирования PSIM.
Соберем передающую часть устройства (рис. 4).
Рис. 4. Схема передающего устройства в программе PSIM
На затворы транзисторов поступают отпирающие импульсы с тактового генератора на микросхеме TL494ID. На рис. 5 приведены диаграммы сигналов на выходах схемы.
Рис. 5. Сигналы в различных точках схемы передатчика
Значения Vs1 и Vs2 показывают тактовые импульсы на затворах транзисторов VT1 и VT2. Значение I_Tхарактеризует ток в катушке индуктивности. Как можно заметить, ток в катушке является периодически изменяющимся во времени сигналом, представляющим собой полуволны синусоиды, разделенные паузами в сигнале. Это связано с наличием мертвого времени, описанного выше. Графики VP_T1 и VP_C характеризуют сигналы напряжения на катушке и на последовательно включенном с ней конденсатором. На рис. 6 представлены зависимости сигналов в точках I_VT1 и I_VT2.
Рис. 6. Сигналы в различных точках схемы передатчика
Промоделируем схему приемника энергии в программе PSIM (рис. 6).
Рис. 7. Схема передающего устройства в программе PSIM
При моделировании данной схемы практический интерес представляют только зависимости выходного тока и выходного напряжения от времени. Данные графики приведены на рис. 8.
Рис. 8. Сигналы в различных точках схемы приемника
Как видно из моделирования, разработанная принципиальная схема соответствует ожидаемым результатам и полностью работоспособна. Однако следует отметить, данное моделирование не учитывает влияние расстояния между приемной и передающей катушкой, а также воздействие скин-эффекта (который все более явно проявляет себя при увеличении частоты). Рассмотрим устройство, созданное с учетом такого влияния.
Разработка экспериментального образца
Разработанное устройство, согласно техническому заданию, предназначено для осуществления беспроводной подзарядки аккумуляторных батарей БПЛА. Для наглядной демонстрации образца устройство представляется без корпуса. Плата устройства изготавливается из фольгированного стеклотекстолита. Внешний вид макета устройства приведен на рис. 9.
Рис. 9. Макет устройства: 1 – плата приемника, 2 – плата передатчика, 3 – блок питания, 4 – катушка передатчика,
5 – катушка приемника
На рис. 10 и 11 изображены осциллограммы выходного напряжения на передающей катушке и напряжения на выходе приемника.
Рис. 10. Осциллограмма выходного напряжения на передающей катушке
Рис. 11. Осциллограмма выходного напряжения на передатчике
Как видно из графиков, теоретические данные, полученные в ходе моделирования, полностью подтвердились на практике. Получено выходное постоянное напряжение амплитудой 5 В на нагрузке 5 Ом.
В данной статье был приведен вариант схемотехнической реализации системы беспроводной подзарядки АКБ БПЛА, обладающей следующими характеристиками:
- Напряжение питания: +24 В.
- Рабочая частота системы: 100 кГц.
- Напряжение заряда: +5 В.
- Ток заряда: 2 А.
При этом система имеет большой потенциал для улучшения: организация канала связи передатчика энергии с БПЛА, автоподстройка частоты (для управления передаваемой мощностью), увеличение количества передающих антенн.
Литература
- Матвеев А.
 Н. Электричество и магнетизм. Учеб. пособие. М.: Наука, 2005.
Н. Электричество и магнетизм. Учеб. пособие. М.: Наука, 2005. - Тамм И. Е. Основы теории электричества. М.: Наука, 2003.
- Калашников С. Г. Электричество. Учеб. пособие. Изд 6-е., стереот. М.: Физматлит, 2003.
- Парсел Э. Берклеевский курс физики. Т. 2. Электричество и магнетизм. Пер. с англ. М.: Наука, 1983.
- TL494 Pulse-Width-Modulation Control Circuits datasheet. www.ti.com/lit/ds/symlink/tlpdf
- Мелешин В. И. Транзисторная преобразовательная техника. Учебник для вузов. М: Техносфера, 2005.
- Grajski K. A., Tseng R., Wheatley C. Qualcomm Incorporated. Loosely-Coupled Wireless Power Transfer: Physics, Circuits, Standards. IEEE, 2012.
- Kesler M., Dr. Highly Resonant Wireless Power Transfer: Safe, Efficient, and over Distance. WiTricity Corporation. witricity.com/wp-content/uploads/2016/12/White_Paper_20161218.pdf
- Bastami S. Magnetic Induction or Magnetic Resonance for Wireless Charging? // Bodo’s Power Systems. January, 2013
- Estabrook M. The convenience of wireless charging: It’s just physics. MediaTek, 2013.
- System Description Wireless Power Transfer Volume I: Low Power Part 1: Interface Definition Version 1.0.1. October 2010.
- Vikram J. G.Qi Versus power 2.0: Who Will Win the Wireless Charging Challenge? electronicsforu.com/electronics-projects/electronics-design-guides/qi-versus-power-2-0-will-win-wireless-charging-challenge
- Umenei A. E. Understanding low frequency non-radiative power transfer. Fulton Innovation, 2011.
- Хрусталев Д. А. Аккумуляторы. М.: Изумруд, 2003.
[Объяснение] Конструкция схемы H-моста, применение, преимущества
В современных электронных схемах, таких как схемы управления двигателем, схемы инвертора, схемы зарядного устройства , используются схемы H-моста . Здесь вы увидите, как работает H-Bridge Circuit . Мы увидим схему H-Bridge, Приложения , Преимущества .
Что такое H-мостовая схема?
Соединение переключателей (обычно четыре переключателя) таким образом, что мы можем изменить полярность напряжения, подаваемого на нагрузку, и схема выглядит как заглавная буква «Н» равна 9. 0003 называется схемой H-Bridge .
Простая принципиальная схема H-Bridge приведена ниже.
Как вы видите на рисунке выше, схема выглядит как заглавная буква «H». Цепь имеет четыре переключателя. С левой стороны нагрузки два ключа соединены последовательно, а с правой стороны нагрузки два ключа соединены последовательно.
Как работает схема H-Bridge?
Как мы знаем, схема H-Bridge в основном используется для изменения полярности напряжения, подаваемого на нагрузку. Итак, давайте рассмотрим принцип работы схемы H-Bridge на примере.
Как вы видите на рисунке выше, мы взяли двигатель постоянного тока в качестве нагрузки, и двигатель постоянного тока подключен к схеме H-моста.
Теперь давайте посмотрим, как мы можем изменить направление вращения двигателя постоянного тока с помощью схемы Н-моста.
Мы знаем, что если мы изменим полярность приложенного напряжения, подаваемого на двигатель с постоянным током, то вращение двигателя изменится, и это можно сделать с помощью схемы Н-моста.
В схеме H-Bridge четыре переключателя соединены как S1, S2, S3, S4.
(1) Когда переключатели S1, S4 замкнуты, а S2, S3 разомкнуты, к двигателю будет приложено положительное напряжение, и двигатель будет вращаться в прямом направлении. В этом случае направление протекания тока указано на приведенной ниже принципиальной схеме.
(2) Когда переключатели S2, S3 замкнуты, а S1, S4 разомкнуты, на двигатель будет подано отрицательное напряжение, и двигатель будет вращаться в обратном направлении. В этом случае направление протекания тока указано на приведенной ниже принципиальной схеме.
(3) Используя Н-мост, мы не только меняем направление вращения двигателя, но и можем его затормозить. Мы знаем, что в случае двигателя постоянного тока во время вращения, если мы отключим двигатель от основного источника питания и соединим клеммы двигателя вместе, двигатель затормозит и перестанет вращаться.
Как вы видите на приведенной выше принципиальной схеме, S1, S3 закрыты, а S2, S4 разомкнуты. Таким образом, двигатель, удаленный от основного источника питания, и клеммы соединены вместе. Таким образом, двигатель затормозит или остановится.
То же самое произойдет, если мы закроем S2, S4 и откроем S1, S3.
Одна из самых важных вещей: помните, что S1, S2 никогда не должны быть соединены вместе, иначе это создаст короткое замыкание на входе питания. S3 и S4 также никогда не соединяются вместе.
Практичная схема Н-моста
Схемы H-Bridge доступны на рынке с интегральной схемой (IC). ИС серии L293X являются примерами схемы H-Bridge. L9110, L293D — микросхемы H-Bridge.
Мы также можем изготовить или спроектировать схему H-моста с дискретными компонентами.
Схема Н-моста с использованием транзисторов
Здесь схема H-моста с использованием транзистора приведена выше. Как видите, мы использовали два типа транзисторов. Два транзистора PNP и два транзистора NPN.
Два верхних транзистора — это транзисторы PNP, а два нижних транзистора — транзисторы NPN. Если вы подключите NPN-транзистор сверху, схема не будет работать.
Мы знаем, что когда мы подаем ток на базовый вывод транзистора, он будет проводить ток. Таким образом, мы можем подавать питание на базу, используя микроконтроллер для запуска схемы.
Как правило, сигнал PWM подается для управления двигателем с использованием схемы H-Bridge.
Мы знаем, что двигатель также будет генерировать электроэнергию, когда он работает и питание отключено. Таким образом, вы можете видеть на приведенной выше диаграмме, что мы использовали диоды с PN-переходом в качестве диода свободного хода для высвобождения энергии. Конечно, если вы используете схему H-Bridge для других целей, вам может не понадобиться использовать обратные диоды.
В следующей статье мы разработаем практическую схему драйвера двигателя с использованием H-моста со всеми соответствующими номиналами компонентов.
Применение схемы H-Bridge
1. Наиболее важное применение схемы Н-моста в качестве схемы драйвера двигателя.
2. В робототехнике используются схемы Н-моста.
3. Схема H-Bridge также используется в качестве инвертора.
4. В современных зарядных устройствах для электромобилей используются схемы Н-моста.
Преимущества схемы H-Bridge
1. Очень высокая эффективность.
2. Очень низкие потери.
3. Эту схему можно разместить в небольших местах.
Спасибо за посещение сайта. продолжайте посещать для получения дополнительных обновлений.
[Объяснение] Схема схемы H-Bridge, применение, преимущества Отзыв от manoranjan das на 31.03.2019 Рейтинг: 5
Инвертор Half H-Bridge – схема, работа, формы сигналов и использование
Содержание
Что такое инвертор Half H-Bridge?
Половина H-моста — это одна из топологий инвертора, которая преобразует постоянный ток в переменный. Типичная полумостовая схема состоит из двух переключателей управления, трехпроводного источника постоянного тока, двух диодов обратной связи и двух конденсаторов, соединяющих нагрузку с источником. Переключатель управления может быть любым электронным переключателем, т. е. MOSFET, BJT, IJBT, тиристорным и т. д.
Схема сконструирована таким образом, что оба переключателя не должны включаться одновременно, и только один из двух переключателей будет работать. Каждый ключ будет работать в течение полупериода (Т/2), обеспечивая половину приложенного напряжения к нагрузке (± В постоянного тока /2). Когда оба переключателя выключены, зарезервированное напряжение на нагрузке будет равно В пост. тока вместо В пост. тока /2. Это называется полумостовой инвертор.
Некоторые соглашения в данной схеме таковы, что
- Ток через S 1 IS I 1 , , в то время как ток протекает через S 2 IS I 2 .
- Выходное напряжение и ток равны В o и i o
- T — это период времени, и коммутаторы считаются однонаправленными.
Запись по теме: Типы инверторов и их применение
Работа полумостового инвертора с нагрузкой R
Работа полумоста с чисто резистивной нагрузкой является самой простой. Чисто резистивная нагрузка не имеет накопительного компонента, поэтому в схеме не нужны диоды обратной связи. Схема с такой нагрузкой будет работать всего в двух режимах.
Режим 1: (0
В этом режиме S 1 включается с временного интервала t=0 до t=T/2, пока S 2 выключен. Как только S 1 включится, появится напряжение на нагрузке. Выходное напряжение по нагрузке будет
V O = V DC /2
Происхождение по переключателю S 1 будет
I O = V DC
I O = V DC DC DC DC 9011 2 I o = V = V = V . /2R L
Где R L — сопротивление нагрузки. Ток течет по часовой стрелке, как показано на рисунке.
Режим 2: (T/2
В этом режиме переключатель S 2 включен с интервала времени t=T/2 до t=T, пока S 1 выключен. Немедленного переключения режимов избегают, поскольку это вызывает короткое замыкание. По этой причине S 2 включается с некоторой задержкой после полного выключения S 1 . В этом случае выходное напряжение будет отрицательным, так как ток входит в нагрузку с противоположного направления, где выходное напряжение будет равно
V o = -V dc /2
The current through S 2 will be
I o = V dc /2R L
Ток течет в обратном направлении через нагрузку, как показано на рисунке. Следовательно, это показывает, что половинный H-мост преобразовал приложенный постоянный ток в переменный.
Форма сигнала полупроводникового моста с R-нагрузкой
Первые два сигнала показывают импульсы, подаваемые на переключатели, где каждый переключатель получает импульс, когда дополнительный переключатель выключен. 3 rd график показывает форму кривой напряжения на нагрузке. Это показывает, что полярность напряжения меняется при переключении. Последние два графика показывают ток через переключатели S 1 и S 2 .
Среднеквадратичное значение выходного напряжения можно рассчитать по формуле
Преобразование Фурье можно использовать для выражения мгновенного напряжения
Поскольку смещения по постоянному току нет, то o равно нулю, а из-за четвертьволновой симметрии все компоненты n равны нулю. Таким образом, вклад b n останется только & b n задается как
. Подставляя значение b n в уравнение ряда Фурье, мы получаем для n=2,4,6,8…
ω – угловая частота выходного напряжения. Четные гармоники выходного напряжения отсутствуют из-за четвертьволновой симметрии. Отсюда результат
Отсюда выходное напряжение примерно равно половине приложенного напряжения.
Ток через резистивную нагрузку можно легко рассчитать, просто разделив среднеквадратичное значение напряжения на его сопротивление.
Работа полумостовой схемы с нагрузкой L и R-L
Работа полумоста с нагрузкой L и R-L одинакова. Поскольку в реальной жизни не существует ни 100% чисто индуктивной нагрузки, ни чисто резистивной нагрузки. Чистая катушка индуктивности имеет некоторое значение омического сопротивления, поэтому на практике чаще встречается нагрузка R-L.
Здесь мы рассмотрим работу с нагрузкой RL в инверторе с половинным мостом H. Рабочую операцию можно понять в 4 режимах, где 2 режима используются для управления переключателями и 2 для возврата накопленной энергии к источникам.
- Связанный пост: Полномостовой инвертор — схема, работа, формы сигналов и использование
Клеммы A и B учитываются в соответствии с соглашением по знаку нагрузки. Интервал времени, когда срабатывает S1, A более положительный, а B более положительный, когда срабатывает S2. Форма кривой тока и формы волны напряжения одинаковы, если нагрузка резистивная. В случае нагрузки RL кривые тока и напряжения не будут расти в своих пиковых точках одновременно. Ток будет отставать, когда преобладает индуктивная нагрузка, а напряжение будет отставать в случае преобладающей емкостной нагрузки.
Демпфирующий ток будет проходить через диоды обратной связи, если полярность тока и напряжения не совпадают. Диод D1 будет проводить, когда ток положительный, а напряжение отрицательное. D2 будет проводить, когда напряжение положительное, а ток отрицательный.
Форма сигнала немного отличается, потому что индуктор сопротивляется изменению потока тока. По этой причине, когда переключатели срабатывают для изменения потока тока, индуктор будет сопротивляться изменению. Отсюда и форма волны.
Эти режимы обсуждаются с учетом того, что изначально все переключатели выключены, а в компонентах накопителей хранится нулевая энергия.
- Связанная запись: Анализ простой цепи R-L с питанием от переменного и постоянного тока
Режим 1 (0
В этом режиме переключатель S1 будет работать от временного интервала t1 до t2 . Ток начнет течь от источника постоянного тока к нагрузке через s1, как только он сработает. Ток будет проходить через клемму B, показывая, что B более положителен по сравнению с клеммой A, как показано на рисунке. На нагрузке появится напряжение источника, равное В dc /2 и ток будет постепенно увеличиваться от нуля до макс. Индуктор будет хранить энергию, поскольку полярность тока и напряжения одинакова.
Режим 2 (t1
Когда переключатель S1 замкнут, на нагрузке появится отрицательное напряжение (-V dc /2), а направление тока останется прежним потому что индуктор будет сопротивляться изменению. Другими словами, катушка индуктивности обеспечивает накопленную энергию, а D2 обеспечивает путь для тока, протекающего от нагрузки к источнику. Ток через нагрузку будет постепенно уменьшаться до тока нагрузки I L становится нулем. Причина в том, что ток течет за счет запасенной энергии в индукторе. Когда дроссель разряжается, ток через нагрузку становится равным нулю.
Основным агентом в этом режиме является диод обратной связи D2, также известный как диод свободного хода . Он имеет две функции; один из них предназначен для возврата энергии, запасенной в нагрузке, в источник, а другой — для уменьшения всплеска di/dt , создаваемого индуктивной нагрузкой. Свободное действие D2 можно более наглядно представить на рисунке выше.
Похожие сообщения:
- Схема преобразователя 12 В в 5 В — повышающие и понижающие преобразователи
- Что такое повышающий преобразователь? Принципиальная схема и работа
- Понижающий преобразователь – схема, конструкция, работа и примеры
Режим 3 (t2
После полного разряда катушки индуктивности через нагрузку ток через нагрузку станет равным нулю. При этом движении срабатывает S2. Направление тока через нагрузку изменится на противоположное. После срабатывания S2 ток начнет увеличиваться и достигнет отрицательного пика. В течение этого интервала и ток, и напряжение отрицательны. Таким образом, индуктор снова сохранит заряд.
Режим 4 (t3
В интервале времени t3 переключатель S2 выключен. Положительное напряжение (V dc /2) появится на нагрузке при отключении S2, а направление тока останется прежним. Диод D1 обеспечит путь, и накопленная энергия будет возвращаться к нагрузке. Ток через нагрузку будет постепенно уменьшаться, пока не станет равным нулю. Свободное действие D1 в этом случае можно представить на следующем рисунке.
Форма сигнала полупроводникового моста с нагрузкой L и R-L
Поскольку чисто индуктивной нагрузки не существует, она должна иметь некоторое сопротивление проводов и сопротивление материала. Следовательно, более практическая нагрузка RL показана в форме волны, а не теоретической.
Мгновенный ток нагрузки I L для чисто индуктивной нагрузки можно рассчитать путем деления выходного напряжения на импеданс нагрузки (Z = R + jnωL)
для R L (индуктивная) нагрузка, ток нагрузки становится
, где θn = tan -1 (nωl/r)
Связанные посты:
- 2299106 цифровой цифровой (ЦАП)
Сравнение сигналов всех нагрузок
Работа инвертора с половинным Н-мостом с нагрузкой RLC останется такой же, как и работа с нагрузкой RL, с небольшим изменением. Таким образом, нет необходимости объяснять операцию в явном виде, но разницу можно увидеть из рисунков их сигналов внизу.
Работа и форма сигнала зависят от значения индуктивности и емкости в нагрузке RLC. Работа инвертора с половинным Н-мостом с нагрузкой RLC такая же, как и с нагрузкой RL.
Как известно, в конденсаторе опережает ток и отстает напряжение, а в катушке индуктивности опережает напряжение и отстает ток. Таким образом, в нагрузке RLC есть два случая; индуктивная доминирующая нагрузка RLC и емкостная доминирующая нагрузка RLC. Первое означает, что индуктивность больше, чем емкость, а второе означает, что емкость больше, чем индуктор в нагрузке RLC.
Следовательно, если индуктивность преобладает в нагрузке RLC, ток нагрузки будет отставать от напряжения нагрузки. И, если емкость преобладает в нагрузке RLC, ток нагрузки будет опережать напряжение нагрузки. Однако фазовый сдвиг будет до некоторой степени сведен на нет интерференцией конденсатора (при преобладающей индуктивной нагрузке) и катушки индуктивности (при преобладающей емкостной нагрузке). В емкостной доминирующей нагрузке RLC диоды обратной связи будут проводить в течение разных интервалов времени из-за изменения формы волны тока.
Related Posts:
- Тиристорный и кремниевый выпрямитель (SCR) – Применение тиристоров
- Что такое выпрямитель? Типы выпрямителей и их работа
- Разница между инвертором и ИБП — источник бесперебойного питания
- Логический вентиль НЕ — логический вентиль цифрового инвертора
- Ручная и автоматическая схема подключения ИБП/инвертора с переключателем
Что такое полумостовой инвертор? — Принципиальная схема и работа
Инвертор — это схема преобразователя, которая преобразует мощность постоянного тока в мощность переменного тока. Переменное выходное напряжение, получаемое от источника постоянного тока с помощью инверторов, может иметь фиксированную или переменную частоту. Чтобы получить мощность переменного тока от мощности постоянного тока, инверторы включают полупроводниковые устройства, такие как тиристоры, BJT, MOSFET, IGBT. В зависимости от соединения тиристоров и коммутирующих компонентов инверторы делятся на три группы:
- Мостовые инверторы
- Полумостовой инвертор и
- Полумостовой инвертор.
- Серийные инверторы
- Параллельные инверторы.
Мостовые инверторы в основном представляют собой инверторы с источником напряжения, которые состоят из небольшого импеданса источника входного постоянного напряжения. Входом мостового инвертора будет источник постоянного тока от батареи или управляемого выпрямителя. На выходе может быть либо однофазное переменное напряжение, либо трехфазное переменное напряжение.
Сравните с полумостовыми и полномостовыми инверторами. В полумостовых инверторах только два тиристора используются для преобразования мощности постоянного тока в мощность переменного тока, тогда как в инверторах с полным мостом используются четыре тиристора. В этой статье давайте узнаем о принципиальной схеме и работе однофазного полумостового инвертора для разных типов нагрузки.
Однофазный полумостовой инвертор с резистивной нагрузкой :
Принципиальная схема однофазного полумостового инвертора с резистивной нагрузкой показана на рисунке ниже. Вход в инвертор подается от разделенного источника питания постоянного тока, т. е. от трехпроводного источника питания постоянного тока. Компоненты T 1 и T 2 представляют собой тиристоры с управляемым затвором, которые создают положительные и отрицательные полупериоды мощности переменного тока на выходе.
Работа однофазного полумостового инвертора с нагрузкой R:
Работа полумостового инвертора делится на два периода,
- В периоде I тиристор T 1 будет работать в течение интервала времени между 0 и T/2 (т. е. для 0 ≤ t ≤ T/2 ).
- В период II тиристор T 2 будет проводить в течение интервала времени между T/2 и T (т. е. при T/2 ≤ t ≤ T).
Где T = (1/частота выходного сигнала). Работа схемы должна быть такой, чтобы оба тиристора не открывались одновременно. Ниже показаны осциллограммы выходного напряжения и токов затвора тиристоров. Поскольку нагрузка предполагается резистивной, форма выходного тока будет равна форме выходного напряжения.
В интервале между 0 и T/2 (т. е. при 0 ≤ t ≤ T/2) срабатывает тиристор T 1 , и мгновенное напряжение на нагрузке составит V dc /2. В момент t = T/2 для тиристора T 1 снимаются импульсы запуска, за счет чего он выключается (схема коммутации тиристоров для простоты не показана и считается выключенной при снятии импульса запуска) .
Также в этот же момент, т.е. при t = T/2, подаются импульсы на тиристор T 2 и, таким образом, включается в момент t = T/2. В промежутке между T/2 и T (т.е. при T/2 ≤ t ≤ T) включенный тиристор T 2 проводит ток, и напряжение на нагрузке будет -V dc /2.
Снова тиристор T 1 срабатывает при t = T и тиристор T 2 выключается. Таким образом, цикл повторяется. Следовательно, тиристор T 1 проводит от 0 до T/2 и создает положительный полупериод, тогда как тиристор T 2 ведет от T/2 к T и создает отрицательный полупериод. Таким образом, переменный выход создается из постоянного тока.
Импульсы запуска обоих тиристоров отличаются по фазе на 180°. Частота выходной волны определяется как 1/T. Изменяя значение T, можно управлять частотой, а также величиной выходного напряжения.
Однофазный полумостовой инвертор с нагрузкой RL:
Только что мы видели работу полумостового инвертора при подключении к нему резистивной нагрузки. Проверим поведение полумостового инвертора при подключении к нему индуктивной нагрузки. Ниже показана схема с нагрузкой RL, которая аналогична схеме, показанной выше, за исключением двух диодов D 9. 0112 1 и Д 2 соединены через два тиристора.
Режим I :
Тиристор T 1 включается в момент t 1 , в этот момент напряжение на нагрузке будет равно +V dc /2, а положительный ток нагрузки увеличивается. Этот ток нагрузки увеличивается до тех пор, пока тиристор T 1 не выключится. В момент t 2 тиристор T 1 закрывается и ток нагрузки достигает максимального значения. Поскольку напряжение нагрузки и ток нагрузки имеют одинаковую полярность, нагрузка накапливает в себе энергию.
Режим II :
Ток нагрузки сохранит свое направление даже после выключения тиристора T 1 . Это происходит из-за индуктивной нагрузки, и эта индуктивная нагрузка создает отрицательное наведенное напряжение, которое, в свою очередь, заставляет диод D 2 смещаться в прямом направлении. Таким образом, энергия, накопленная нагрузкой, теперь возвращается к источнику через нижнюю половину источника питания и диод D 2 , как показано ниже.
Режим III :
В этом режиме тиристор Т 2 включается в момент времени t 3 . В этот момент запасенная энергия индуктивной нагрузки будет передана нижней половине источника питания и станет равной нулю. Теперь напряжение нагрузки будет равно -V dc /2, а также ток нагрузки будет отрицательным. Отрицательный ток нагрузки достигает максимального значения до тех пор, пока тиристор T 2 не будет выключен. В момент t 4 тиристор T 2 выключен.
Режим IV :
Отрицательный ток нагрузки сохраняет свое направление даже после выключения тиристора T 2 . Это происходит из-за индуктивной нагрузки, и эта индуктивная нагрузка теперь создает положительное наведенное напряжение, которое, в свою очередь, заставляет ток нагрузки течь через верхнюю половину источника питания и диод D 1 . Таким образом, энергия, накопленная нагрузкой, возвращается обратно к источнику, а напряжение нагрузки меняет свою полярность.
Таким образом, на стороне нагрузки создаются положительные и отрицательные полупериоды, и вся операция повторяется снова и снова. Ниже приведены осциллограммы напряжения нагрузки, тока нагрузки, токов тиристоров I T1 и T T2 , а токи диодов I D1 и I D2 .
Следовательно, когда к инвертору подключена индуктивная нагрузка. Ток нагрузки отстает от напряжения нагрузки. Чтобы обеспечить путь для тока нагрузки, когда тиристоры выключены, диоды включены встречно-параллельно тиристору. Таким образом, накопленная энергия из-за индуктивной нагрузки возвращается к источнику постоянного тока через диоды, и поэтому они называются диодами с обратной связью. Однако, если инвертор подключен к чисто резистивной нагрузке, реактивная мощность будет равна нулю, и, следовательно, в диодах нет необходимости.
Недостатки полумостового инвертора:
- Этот тип схемы инвертора требует трехпроводного источника питания постоянного тока.
- Величина выходного напряжения составляет только В постоянного тока /2.
Эти ограничения можно обойти, используя мостовой инвертор.
Управление двигателем постоянного тока с помощью Н-моста
В этом эксперименте мы будем управлять двигателем с помощью расширения ШИМ. Для этого мы будем использовать чип H-Bridge и отправлять ему соответствующие управляющие сигналы с расширением PWM, после чего H-Bridge позаботится о запуске двигателя. Попутно мы узнаем, как именно работают H-мосты, и создадим больше классов, использующих преимущества тех, которые мы создали ранее. Чтобы расширить это, мы подключим три переключателя и запрограммируем Omega для управления скоростью и направлением двигателя в зависимости от их положения.
Если вам нужно напомнить, как работает ШИМ (или широтно-импульсная модуляция), вы можете найти объяснение в первом эксперименте с диммированием светодиодов.
Как работают двигатели постоянного тока
Простейший из всех двигателей, двигатель постоянного тока вращается, когда на него подается постоянное напряжение. Такой двигатель можно найти в дронах, электроинструментах и роботах. Двигатель постоянного тока может изменять скорость и направление в зависимости от того, сколько энергии подается на него и в каком направлении.
Двигатель постоянного тока использует магнитное поле, создаваемое электромагнитом, для вращения якоря двигателя. Электромагнит активируется подачей напряжения, поэтому, когда питание включено, магнитное поле, которое он генерирует, заставит якорь (катушка провода) генерировать собственное магнитное поле, эти поля отталкивают друг друга и заставляют якорь вращаться.
Чтобы двигатель вращался в другую сторону, нам нужно изменить приложенное напряжение, то есть ток через двигатель будет противоположным. К сожалению, переключение направления тока с контроллера, такого как Omega, затруднено. Процессоры используют низкий ток и напряжение, плюс они обычно отсоединяются от двигателя, чтобы индуктивная обратная связь не нарушала их работу.
Если бы только было какое-то устройство, которое могло бы помочь нам контролировать мощность, которую мы подаем на наши двигатели постоянного тока…
Обратите внимание, что подача тока на обе клеммы может привести к повреждению двигателя.
Как работают Н-мосты
Н-мост — это схема, позволяющая подавать напряжение на нагрузку в любом направлении. Электрический ток течет от источника к земле, и многие компоненты должны быть ориентированы в соответствии с направлением тока, чтобы они работали должным образом. H-мост — это схема, построенная для изменения направления напряжения и, следовательно, тока, протекающего к нагрузке.
В электрических терминах нагрузка — это любой элемент цепи, который потребляет электроэнергию для выполнения каких-либо действий — нагрева, включения, освещения и т. д.
H-мост состоит из четырех коммутаторов: двух последовательно и двух параллельно, при этом нагрузка размещается между коммутаторами. В этой конфигурации схема принимает форму буквы «Н».
Чтобы изменить направление подаваемого напряжения, H-Bridge управляет переключателями, подающими питание на нагрузку ( S1 ). Глядя на схему, если мы замкнем S1 и S4 , оставив остальные открытыми, напряжение будет прикладываться к двигателю слева направо. Если вместо этого замкнуты S2 и S3 , а остальные разомкнуты, напряжение будет подаваться справа налево.
Эта конфигурация может вызвать короткое замыкание, поэтому большинство H-мостов не позволяют напрямую управлять этими коммутаторами.
Типичные области применения
Несколько типичных применений схем H-Bridge: * Создайте переменный ток (переменный ток) из источника постоянного тока, используя сигнал ШИМ для управления H-мостом. Это процесс, известный как инверсия мощности. * Обеспечьте возможность обратного тока через двигатель постоянного тока, позволяя вращение в любом направлении.
Кроме того, Н-мосты позволяют питать нагрузки независимо от управляющих сигналов, обеспечивая изоляцию цепей.
ШИМ-сигнал приводит в действие двигатель за счет очень быстрого включения и выключения источника питания. Обычно это можно сделать, отправив сигнал ШИМ на транзистор, и транзистор переключит питание. Изменяя ширину импульса ШИМ-сигнала, можно управлять скоростью двигателя. H-мост может заменить транзистор и добавить функциональность, позволяя легко изменять направление тока. Мы по-прежнему посылаем пульсирующий сигнал на H-мост, чтобы контролировать скорость, за исключением того, что теперь мы можем переключать направление тока, меняя переключатели, которые разомкнуты.
В нашей схеме мы будем использовать микросхему интегральной схемы Н-моста ( IC ), поэтому нам не нужно самостоятельно подключать внутренние компоненты, а также для предотвращения коротких замыканий, которые могут возникнуть, если мы будем напрямую управлять этими переключателями.
Если вы хотите начать строить прямо сейчас, перейдите к следующему разделу. Если вы хотите узнать, как сигналы из нашего кода будут управлять двигателем, читайте дальше!
Чип SN754410 H-Bridge
Чип SN754410 содержит два H-моста, что дает нам четыре выхода, что позволяет нам управлять двумя двигателями постоянного тока. На данный момент мы будем управлять только одним двигателем.
Таким образом, вместо переключателей 1/2/3/4 мы будем переключать 1A и 2A (как показано в техническом описании). В этом уроке мы будем использовать один из двух H-мостов для управления мощностью, подаваемой на два входа вашего двигателя постоянного тока. В частности, пара входов и выходов ( 1A , 2A и 1Y , 2Y ) на левой стороне микросхемы.
На микросхеме 1A управляет полярностью 1Y , то же самое касается 2A и 2Y . На очень высоком уровне этот чип H-моста изменяет выходное напряжение (на контакты, помеченные Y ) в соответствии с входным напряжением, подаваемым на контакты, помеченные A . Например, отправка «высокого» на 1A отправит то же самое на 1Y . Разница заключается в том, что сигнал, отправляемый на контакты Y , использует напряжение, подаваемое на контакты 8 , независимо от входного напряжения.
Напряжение действует подобно водопаду — оно всегда создает ток, вытекающий из напряжения источник (вверху) к заземлению (внизу). Вы можете представить источник как HIGH , а землю как LOW . Таким образом, если вы подключите двигатель к 1Y и 2Y , он будет двигаться только в том случае, если они посылают различных сигналов .
Контакт 1,2EN просто включает или выключает H-мост. Если 1,2EN видит «высокий», то все, что мы рассмотрели выше, происходит в штатном режиме, если выключен, то на выходы ничего посылаться не будет, несмотря ни на что 1A и 2A .
Благодаря такой реализации Н-моста — с двумя переключателями вместо четырех независимых — микросхема удобно обрабатывает ситуации короткого замыкания и упрощает работу Н-моста.
Создание схемы
Эта схема соединяет Omega с двигателем постоянного тока. Сначала Omega будет подключен к расширению PWM, расширение PWM будет отправлять сигналы на H-мост, который будет подавать питание на двигатель постоянного тока в соответствии с сигналами. ШИМ будет сигнализировать, как быстро двигатель должен вращаться, а Н-мост действует как переключатель, включая или выключая напряжение питания в соответствии с сигналом ШИМ.
На рисунках вы видите более короткие провода, которые мы использовали вместо перемычек, чтобы дать вам лучшее представление о том, что происходит. Чтобы было легче увидеть вращение двигателя, мы обмотали ось двигателя скотчем.
Примечание : Как видно выше, чип примерно зеркальный. Верхний правый и нижний левый контакты — это питание для выходов ( контакт 8 ) и чипа ( контакт 16 ) соответственно. Разница между двумя выводами питания заключается в том, что напряжение, подаваемое на выходы, может достигать 36 В, а напряжение, подаваемое на микросхему, рекомендуется в пределах 2–5 В. Если вы хотите запитать большой двигатель, вам следует запитать двигатель от внешнего источника через контакт 8 и подать около 3В на контакт 16 .
Вот диаграмма, к которой можно обратиться, если что-то станет беспокойным:
Что вам понадобится
Вам может понадобиться пара резиновых лент и блок, чтобы удерживать двигатель постоянного тока во время его работы. В целом, вот что вы будете использовать для создания схемы:
- 1x Omega2, подключенный к док-станции расширения
- 1x PWM Expansion подключен к док-станции расширения выше
- 1x двигатель постоянного тока
- 1x H-мост (имеет «SN754410» поверх микросхемы)
- 1 макетная плата
- 3 переключателя SPDT
- Проволочные перемычки
- 4x M-F
- 18x М-М
Подключение компонентов
При работе с микросхемами установка направляющих макетной платы может быть очень полезна для уменьшения беспорядка. Для этого эксперимента мы сначала сделаем это, чтобы уменьшить количество необходимых проводов.
- Соедините отрицательные (
-) шины с обеих сторон платы вместе на одном конце (обычно конец, удаленный от большей части проводки) с помощью перемычки M-M, мы назовем ееЗЕМЛЯрейка. - Проделайте то же самое с положительными (
+) шинами, в этом эксперименте мы назовем эти шиныVcc.
Теперь давайте настроим нашу схему:
- Возьмите H-мост, выберите место на макетной плате и подключите H-мост через канал в середине макетной платы. Он должен располагаться одной стороной в столбце E, а другим — в столбце F, при этом полукруглый вырез
- Обратите внимание на номер каждого контакта на приведенной выше схеме. Если вы заблудились, всегда ищите небольшой вырез в виде полукруга на чипе, обозначающий «верхнюю часть» H-моста, чтобы правильно сориентировать его.
- Это важно, вы можете повредить H-мост, если он подключен неправильно!
- Давайте сначала подключим все соединения заземления — контакты
4,5,12и13на H-мосте есть все контакты заземления, поэтому давайте подключим их к шинеGNDс соответствующих сторон, используя четыре перемычки M-M. Мы использовали короткие провода, чтобы вы могли видеть, что происходит.
- Теперь пришло время подключить двигатель к Н-образному мосту, двигатель должен иметь два провода со штыревыми разъемами, один красный и один черный. Они будут подключены к контактам Н-моста через макетную плату.
- Подключите белый провод к
1YН-моста (ряд 7 на нашей макетной плате). - Подключаем черный провод к
2YН-моста (ряд 10 на нашей плате).
- Подключите белый провод к
- Далее настроим переключатели — с их помощью мы будем контролировать, какие цифровые сигналы отправляются на ШИМ-расширение, а в свою очередь двигатель через H-мост:
- Выберите три набора из трех рядов (мы использовали ряды с 14 по 24)
- Вставьте переключатели в ряды, по три ряда на переключатель — для каждого переключателя требуется зазор в половину ряда между соседними переключателями, если вы хотите разместить их рядом.
- С помощью 6 перемычек M-M соедините крайний левый ряд каждого коммутатора с шиной
GND, а крайний правый ряд каждого коммутатора — с шинойVcc.
Теперь, когда схема Н-моста готова, давайте подключим все это к вашей Omega, чтобы она могла управлять двигателем:
- Мы заземлим цепь, соединив шину
GNDс шинойGND. контакт на каналеS0на расширении ШИМ с одной перемычкой MF. - Используя 3 перемычки M-M, подключите центральный ряд каждого коммутатора к Omega GPIO0, GPIO1 и GPIO2 на разъемах расширения. Убедитесь, что вы помните, что есть что, так как позже они будут управлять вашим двигателем!
- Возьмите одну перемычку M-M и соедините
1,2ENна микросхеме (ряд 5 на нашей плате) с шинойVcc. - Используя две перемычки MF,
- Подключить
1A, или ряд 6 на нашей плате, к каналуS0. - Подключить
2A, или ряд 11, в каналS1.
- Подключить
- И последнее, но не менее важное: мы установим питание на шину Vcc, подключив оборванный конец перемычки Vcc (красный) к контакту
VccканалаS0расширения PWM.
Вот как это выглядит, когда все подключено:
Меры предосторожности при подключении
Возможно, вы заметили, что мы подключили все компоненты макетной платы и соединения GPIO сначала до подключение основной линии электропередач. Мы делаем это, чтобы свести к минимуму риск ошибок при подключении проводки и питания цепи, которая потенциально может повредить компоненты или Omega. Это хорошая практика, и мы будем строить схемы таким образом на протяжении всех этих экспериментов.
Если вы действительно хотите убедиться, что ваши компоненты безопасны перед проведением эксперимента, вы можете оставить Omega ВЫКЛЮЧЕННЫМ перед подключением питания к цепи. Как только все будет подключено, вы можете снова включить Omega.
Есть причина, по которой мы используем контакты
GNDиVccна плате PWM Expansion , а не на штырьках док-станции. Если он подключен к штырьковым контактам, двигатель будет подавать напряжение обратной связи на док-станцию расширения. Это может привести к зацикливанию загрузки или другому непредсказуемому поведению омеги. На контактахVcc/GNDмодуля PWM Expansion установлены прерывающие диоды для предотвращения этого.
Написание кода
Давайте добавим определение класса для двигателя постоянного тока, управляемого H-мостом, в файл motors.py , который мы создали в предыдущем эксперименте. Это определение класса будет специально управлять двигателем постоянного тока, подключенным к Н-мосту. Он основан на абстракциях класса OmegaPwm и заботится о деталях работы двигателя.
Откройте motors.py из эксперимента Dimming LEDs и добавьте следующее:
H_BRIDGE_MOTOR_FORWARD = 0
H_BRIDGE_MOTOR_REVERSE = 1
класс hBridgeMotor:
"""Класс, что два цифровых сигнала и ШИМ-сигнал для управления H-мостом"""
def __init__(self, pwmChannel, fwdChannel, revChannel):
# обратите внимание на каналы
self.pwmChannel = pwmChannel
self.fwdChannel = fwdChannel
self.revChannel = revChannel
# настроить объекты
self.pwmDriver = OmegaPwm(self.pwmChannel)
self.pwmDriver.setDutyCycle(0)
self.fwdDriver = OmegaPwm(self.fwdChannel)
self.fwdDriver.setDutyCycle(0)
self.revDriver = OmegaPwm(self.revChannel)
self.revDriver.setDutyCycle(0)
# устанавливаем ограничения
self.minDuty = 0
self.maxDuty = 100
def setupMinDuty (я, обязанность):
"""Установите минимально допустимый рабочий цикл для ШИМ"""
self.minDuty = обязанность
def setupMaxDuty (я, обязанность):
"""Установите максимально допустимый рабочий цикл для ШИМ"""
self. maxDuty = обязанность
сброс защиты (сам):
"""Установите ШИМ на 0%, отключите оба элемента управления H-Bridge"""
рет = self.pwmDriver.setDutyCycle (0)
рет |= self.fwdDriver.setDutyCycle(0)
рет |= self.revDriver.setDutyCycle(0)
вернуться обратно
def spin(я, направление, обязанность):
"""Установите ШИМ на указанную обязанность и в указанном направлении"""
возврат = 0
#0 - вперед, 1 - назад
если (направление == H_BRIDGE_MOTOR_FORWARD):
self.revDriver.setDutyCycle(0)
self.fwdDriver.setDutyCycle(100)
elif (направление == H_BRIDGE_MOTOR_REVERSE):
self.fwdDriver.setDutyCycle(0)
self.revDriver.setDutyCycle(100)
еще:
возврат = -1
если (возврат == 0):
# сверяемся с минимальным и максимальным pwm
если долг < self.minDuty:
долг = self.minDuty
elif duty > self.maxDuty:
долг = self. maxDuty
# запрограммировать рабочий цикл
ret = self.pwmDriver.setDutyCycle(долг)
вернуться обратно
def spinForward(я, долг):
ret = self.spin (H_BRIDGE_MOTOR_FORWARD, обязанность)
вернуться обратно
def spinReverse (я, обязанность):
ret = self.spin (H_BRIDGE_MOTOR_REVERSE, обязанность)
возврат рет Теперь давайте напишем код для эксперимента. Этот код заставит мотор делать что-то, используя класс hBridgeMotor, который мы создали выше. Скрипт попросит вас ввести несколько чисел и заведет мотор на основе вашего ввода!
Создайте файл с именем MAK03-hBridgeExperiment.py и вставьте в него следующий код:
from motors import hBridgeMotor импорт лукаGpio время импорта # настроить каналы расширения PWM, подключенные к H-Bridge IC H_BRIDGE_1A_CHANNEL = 0 H_BRIDGE_2A_CHANNEL = 1 H_BRIDGE_12EN_CHANNEL = 2 # создаем объекты gpio для наших входов переключателей направлениеGPIO = onionGpio.
Чего ожидать
При запуске скрипт запускает ШИМ-генератор, а затем устанавливает выход в активное состояние (канал от 0 до 100% нагрузки). Затем скрипт запросит у вас набор из 3-х цифр, первая задает направление мотора, следующие две цифры задают скорость. Программа будет повторно запрашивать ввод и соответствующим образом регулировать скорость и направление.
| Первая цифра | 0 | Двигатель вращается по часовой стрелке |
| 1 | Двигатель вращается против часовой стрелки | |
| Последние две цифры | 00 | от |
| 01 | Скорость 50 % | |
| 10 | Скорость 60 % | |
| 11 | Скорость 70% |
Вот он в действии:
Как вы, наверное, уже видели, здесь используется бесконечный цикл, и вы можете прервать его, нажав Ctrl-C .
Примечание : Мы рекомендуем установить двигатель на 000 перед разрывом цепи, чтобы не повредить двигатель. Напоминаем, что вы можете просто вызвать pwm-exp -s , чтобы остановить мотор в терминале или по ssh.
Пристальный взгляд на код
В этом эксперименте мы объединили знания из предыдущих экспериментов для управления двигателем постоянного тока с помощью Python. Теперь мы получаем пользовательский ввод в интерактивном режиме, что позволяет нам изменять вывод в режиме реального времени. Кроме того, мы использовали 93 = 8 различных состояний системы переключения. Это означает, что нам действительно нужно учитывать только 8 отдельных случаев ввода.
К сожалению, это не всегда так просто, и хорошей практикой является предположение, что можно получить самые разные входные данные. Здесь большая часть проверки ошибок происходит прямо в начале взаимодействия, ограничивая количество доступных входных состояний — у нас есть только три переключателя. Если бы мы позволили пользователям вводить произвольные команды, нам пришлось бы выполнять гораздо больше проверок.
Таблицы поиска
Вы можете заметить, что ввод, вводимый пользователем в основном цикле, всегда сверяется с переменной motorCommands — эта переменная хранит набор известных значений для проверки. В нашем случае таблица содержит действительный ввод переключателя, совпадающий с его соответствующим выводом, также известный как пара ключ-значение, и сценарий отправляет вывод на ШИМ-контроллер, если ввод, полученный от пользователя, соответствует любому значению в таблице.
Проверяя входные данные по таблице поиска перед отправкой команд, мы можем гарантировать отсутствие ошибочных команд. Соедините это с надлежащей калибровкой, и мы сможем значительно снизить риск удаленного управления оборудованием.
Пределы ШИМ-управления двигателем
Для работы двигателей постоянного тока требуется приложенное напряжение, а использование ШИМ означает, что двигатель фактически «отвечает» серией импульсов. Что-то вроде толкания ящика, чтобы заставить его двигаться, а не быстрого постукивания по нему. Точно так же, как существует минимальное усилие, необходимое для нажатия, чтобы заставить коробку двигаться, существует предел того, насколько коротким может быть каждое нажатие, прежде чем мотор не будет реагировать на него.
То есть, если ширина импульса ниже определенного порога, двигатель не запустится. При тестировании ширина импульса, необходимая для запуска двигателя, составляет около 10 мс, что составляет около 50% нагрузки при частоте 50 Гц.
Попробуйте различные настройки двигателя и посмотрите, как он себя ведет. Если вы тестируете проект с двигателями и хотите замедлить его для отладки, помня об ограничениях ШИМ-управления двигателем, вы сэкономите много времени!
В следующий раз мы выведем текст на экран.
Основы проектирования реализации изолированного драйвера затвора полумоста
Скачать PDF
Изолированные полумостовые драйверы затворов используются во многих приложениях, начиная от изолированных модулей питания постоянного тока, где требуется высокая плотность мощности и эффективность, до солнечных инверторов, где важны высокое напряжение изоляции и долговременная надежность. Эти концепции проектирования будут подробно обсуждаться по мере того, как в этой статье исследуется способность изолированных полумостовых драйверов затворов обеспечивать высокую производительность и небольшие размеры решения.
Функция драйвера изолированного полумоста заключается в управлении затворами N-канальных MOSFET (или IGBT) верхнего и нижнего плеча с низким выходным сопротивлением для уменьшения потерь проводимости и малым временем переключения для уменьшения потерь переключения. Драйверы верхнего и нижнего плеча требуют очень точного согласования временных характеристик, чтобы обеспечить точное и эффективное переключение. Это уменьшает мертвое время от выключения одного ключа полумоста до включения второго ключа. Типичный подход к реализации функции управления изолированным полумостовым затвором заключается в использовании оптопары для изоляции, за которой следует высоковольтная ИС драйвера затвора, как показано на рисунке 1. Одна потенциальная проблема с этой схемой заключается в том, что имеется только один изолированный вход. канала, и он зависит от высоковольтного драйвера для обеспечения необходимого согласования синхронизации между каналами, а также зависит от времени простоя, необходимого для приложений. Еще одна проблема заключается в том, что высоковольтные драйверы затворов не имеют гальванической развязки и вместо этого полагаются на изоляцию перехода, чтобы отделить управляющее напряжение верхнего плеча от управляющего напряжения нижнего плеча в той же ИС. Паразитная индуктивность в цепи может вызвать выходное напряжение, В S , чтобы уйти под землю во время события переключения нижней стороны. Когда это происходит, драйвер верхней стороны может защелкнуться и получить необратимое повреждение.
&amp;amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half -bridge-gate-driver/figure1.png?w=435 ‘ alt=’Рисунок 1’&amp;amp;gt;
Рис. 1. Высоковольтный драйвер затвора полумоста.
Драйвер затвора оптопары
Следующий подход, показанный на рис. 2, позволяет избежать проблем с взаимодействием между верхним и нижним полюсами за счет использования двух оптронов для гальванической развязки между выходами. Схема драйвера затвора часто включается в тот же пакет, что и оптрон, и чаще всего используются две отдельные микросхемы драйвера затвора оптрона для завершения изолированного полумоста, что увеличивает размер решения. Следует отметить, что оптопары изготавливаются как дискретные устройства, даже если они упакованы по два вместе, поэтому они будут иметь ограничения по межканальному согласованию. Это увеличит необходимое время простоя между выключением одного канала и включением другого канала, что снизит эффективность. Скорость отклика оптопары также ограничена емкостью основного бокового светоизлучающего диода (СИД), а управление выходом со скоростью до 1 МГц будет ограничено его задержкой распространения (максимум 500 нс) и медленным нарастанием и время спада (макс. 100 нс). Чтобы оптопара работала на максимальной скорости, ток светодиода необходимо увеличить до более чем 10 мА, потребляя больше энергии и снижая срок службы и надежность оптрона, особенно в условиях высоких температур, характерных для солнечных инверторов и источников питания.
&amp;amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half -bridge-gate-driver/figure2.png?w=435 ‘ alt=’Рисунок 2’&amp;amp;gt;
Рис. 2. Драйвер затвора полумоста оптопары.
Драйвер затвора импульсного трансформатора
Далее мы рассмотрим гальванические развязки, которые имеют преимущество в скорости по сравнению с оптопарами из-за меньших задержек распространения и более точной синхронизации. Импульсный трансформатор — это изолирующий трансформатор, который может работать на скоростях, часто необходимых для драйверов полумостовых затворов (до 1 МГц). ИС драйвера затвора может использоваться для подачи высоких токов, необходимых для зарядки емкостных затворов MOSFET. Драйвер затвора на рис. 3 будет дифференциально управлять первичной обмоткой импульсного трансформатора, который имеет две обмотки на вторичной обмотке для управления каждым затвором полумоста. Преимущество использования импульсного трансформатора заключается в том, что он не требует изолированных источников питания для управления полевыми МОП-транзисторами на вторичной стороне. Потенциальная проблема в этом приложении может возникнуть, когда в катушках индуктивности протекают большие переходные токи управления затвором, вызывающие звон. Это потенциально может включать и выключать затвор, когда это не предусмотрено, что приводит к повреждению МОП-транзисторов. Еще одно ограничение импульсных трансформаторов заключается в том, что они могут плохо работать в приложениях, требующих сигналов с рабочим циклом более 50%. Это связано с тем, что трансформаторы могут подавать только сигналы переменного тока, поскольку поток сердечника должен сбрасываться каждый полупериод для поддержания баланса вольт-секунд. Наконец, магнитопровод и изолированные обмотки импульсного трансформатора требуют относительно больших размеров. Это, в сочетании с микросхемой драйвера и другими дискретными компонентами, создает решение, которое может быть слишком большим для многих приложений с высокой плотностью.
&amp;amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half -bridge-gate-driver/figure3.png?w=435 ‘ alt=’Рисунок 3’&amp;amp;gt;
Рис. 3. Драйвер затвора полумоста импульсного трансформатора.
Драйвер затвора цифрового изолятора
Теперь мы рассмотрим подход цифрового изолятора к изолированному полумостовому драйверу затвора. На рис. 4 цифровой изолятор использует стандартный процесс интегральной схемы КМОП с металлическими слоями для формирования катушек трансформатора, разделенных полиимидной изоляцией. Эта комбинация обеспечивает изоляцию более 5 кВ (среднеквадратичное значение) (номинальное значение 1 минута), что может использоваться в источниках питания с усиленной изоляцией и инверторах.
&amp;amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half -bridge-gate-driver/figure4.png?w=435 ‘ alt=’Рисунок 4’&amp;amp;gt;
Рис. 4. Цифровой изолятор с трансформаторной изоляцией.
Как показано в схеме на рис. 5, цифровой изолятор устраняет светодиод, используемый в оптроне, и связанные с ним проблемы старения, потребляет гораздо меньше энергии и более надежен. Между входом и выходом, а также между выходами предусмотрена гальваническая развязка для устранения взаимодействий между верхним и нижним полюсами. Выходные драйверы обеспечивают низкий выходной импеданс для уменьшения потерь проводимости и малое время переключения для уменьшения потерь переключения. В отличие от оптопары, цифровые изоляторы верхнего и нижнего плеча представляют собой интегральные схемы с согласующими выходами для повышения эффективности. Интегральная схема высоковольтного драйвера затвора (рис. 1) имеет дополнительную задержку распространения в схеме сдвига уровня, поэтому она не может соответствовать временным характеристикам между каналами, как это может сделать цифровой изолятор. Такая интеграция драйверов затворов в цифровой изолятор уменьшает размер решения до одного пакета, что значительно уменьшает размер решения.
&amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half-bridge -gate-driver/figure5.png?w=435 ‘ alt=’Рисунок 5’&amp;amp;gt;
Рис. 5. Цифровой изолятор 4 Драйвер затвора.
Устойчивость к синфазным помехам
Во многих драйверах полумостовых затворов для высоковольтных источников питания могут возникать очень быстрые переходные процессы на переключающих элементах. В этих приложениях, если большое значение dV/dt может емкостно проникнуть через изолирующий барьер, это может привести к ошибкам логического перехода через барьер. В изолированном приложении драйвера полумоста это может включить оба переключателя в перекрестной проводимости, что может вывести из строя переключатели. Любая паразитная емкость через изолирующий барьер, как правило, является путем связи для синфазных переходных процессов. Оптопары должны иметь очень чувствительные приемники для обнаружения небольшого количества света, прошедшего через их изолирующий барьер, а их выходы могут быть нарушены большими синфазными переходными процессами. Чувствительность оптопары к синфазным переходным напряжениям может быть улучшена за счет добавления экрана между светодиодом и приемником, как сделано большинство драйверов затвора оптопары. Этот экран может улучшить устойчивость к синфазным помехам (CMTI) от стандартной оптрона с номиналом менее 10 кВ/мкс до 25 кВ/мкс для драйвера затвора оптрона. Для многих приложений управления затворами может быть достаточно CMTI 25 кВ/мкс, но для источников питания с большими переходными напряжениями и для приложений с солнечными инверторами может потребоваться CMTI 50 кВ/мкс или более.
могут передавать более высокие уровни сигналов на свои приемники и выдерживать очень высокие уровни синфазных переходных процессов без ошибок данных. Трансформаторные изоляторы представляют собой четыре оконечных устройства и обеспечивают низкий дифференциальный импеданс для сигнала и высокий синфазный импеданс для шума, что может обеспечить превосходный CMTI. Другие цифровые изоляторы могут использовать емкостную связь для создания изменяющегося электрического поля и передачи данных через изолирующий барьер. В отличие от трансформаторного изолятора, конденсаторный изолятор представляет собой устройство с двумя выводами, и шум и сигнал имеют один и тот же путь передачи. В устройстве с двумя выводами частоты сигнала должны быть намного выше ожидаемой частоты шума, чтобы барьерная емкость представляла собой низкий импеданс по отношению к сигналу и высокий импеданс по отношению к шуму. Когда уровень синфазного шума становится достаточно большим, чтобы подавить сигнал, это может привести к искажению данных на выходе изолятора. Пример искажения данных изолятора на основе конденсатора показан на рис. 6, где выходной сигнал (канал 4) имеет низкий уровень в течение 6 нс во время синфазного переходного процесса всего 10 кВ/мкс. Обратите внимание, что эти данные были получены при пороговом уровне нарушения работы изолятора на основе конденсатора, и если переходный процесс был больше, сбой мог длиться гораздо дольше, что могло сделать переключение МОП-транзисторов нестабильным. Напротив, цифровые изоляторы на основе трансформаторов показали, что они выдерживают синфазные переходные процессы свыше 100 кВ/мкс без искажения данных на выходе (см. рис. 7).
&amp;lt;img src=’https://www.analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half-bridge -gate-driver/figure6.png?w=435 ‘ alt=’Рисунок 6’&amp;amp;gt;
Рис. 6. Конденсаторный цифровой изолятор с CMTI < 10 кВ/мкс.
&lt;img src=’https://www. analog.com/-/media/analog/en/landing-pages/technical-articles/isolated-half-bridge-gate -driver/figure7.png?w=435 ‘ alt=’Рисунок 7’&gt;
Рис. 7. Трансформаторный цифровой изолятор ADuM140x с CMTI 100 кВ/мкс.
Таким образом, для изолированных полумостовых драйверов затворов было показано, что цифровой изолятор на основе трансформатора предлагает многочисленные преимущества по сравнению с конструкциями на основе оптопар и импульсных трансформаторов. Размер решения и сложность конструкции значительно сокращаются за счет интеграции, что приводит к значительному улучшению временных характеристик. Надежность также повышается благодаря гальванической развязке выходных драйверов и более высокому показателю CMTI.
использованная литература
Техническая статья, Защита от переходных процессов в синфазном режиме, Chris Coughlin (Analog Devices)
H Мостовой драйвер двигателя постоянного тока, рабочий, приложения
Привет, друзья, добро пожаловать на борт. В этом посте мы подробно рассмотрим драйвер двигателя постоянного тока моста H. Регулирование движения двигателя постоянного тока представляет собой изменение конкретного факта привода двигателя постоянного тока, который управляет движением направления двигателя. Существует множество приложений в отраслях и проектах, где направление движения двигателя необходимо для определенных приложений. Примером управления направлением двигателя является конвейерная лента, которая обычно используется для различных типов процесса проверки в различных категориях отраслей промышленности и фабрик.
Эта категория конвейерных систем нуждалась в регулировке двигателя в двух направлениях для выполнения процедуры проверки с высокой точностью. Здесь мы подробно рассмотрим процесс настройки H-моста, который поможет управлять направлением вращения двигателя. Итак, давайте начнем.
Знакомство с драйвером двигателя H-моста
- Схема привода двигателя H-моста используется для обеспечения напряжения на выходе или нагрузке в разных направлениях. Он создан с использованием 4 переключающих компонентов, которые являются транзисторами или МОП-транзисторами. Основное применение мостовой схемы H — это запуск двигателя в любом направлении, установленного в роботах и некоторых других связанных приложениях.
- Эта схема также используется в схемах преобразователя постоянного тока в постоянный, переменного тока в переменный и постоянного в переменный.
- PCBWay является поставщиком и производителем печатных плат в Китае. Шэньчжэнь является мировым центром исследований и разработок в течение последних нескольких лет, где находится этот производитель.
- Имея возможности и опыт больше, чем за предыдущие десять лет в процессе производства печатных плат и сопутствующих услуг, PCBWAY всегда старается выполнить все требования своих пользователей.
- Более важными особенностями, которые отличают его от других производителей, являются быстрая и своевременная доставка продукта, высокое качество, доступная цена и специальные виды предложений для своих клиентов.
- Теперь это очень опытный поставщик, расположенный в Китае. Они гордятся тем, что являются лучшим деловым партнером с этим хорошим парнем в каждом аспекте ваших требований, связанных с печатными платами.
H Мост Описание схемы
- Эта конфигурация схемы обычно создается в виде ИС.
- Эта схема обозначена как Н-мост, так как в проекте используется Н-подобная компоновка.
- Его структура очень проста и состоит из 4 коммутаторов, сконфигурированных как S1 S2 S3 и S4, как показано на рисунке ниже.
- Для создания схемы этого проекта мы получили услуги по проектированию от самого надежного и заслуживающего доверия поставщика печатных плат PCBWAY.
- конфигурация цепи такова, что если выключатели S1 и S4 замкнуты, а два других находятся в разомкнутом состоянии, то на двигатель подается положительный цикл напряжения.
- Теперь, если мы изменим положение переключателя с S2 на S3 в закрытом состоянии, тогда двигатель будет работать в реверсивном состоянии и будет работать в противоположном направлении.
- Здесь следует принять некоторые меры предосторожности во время этой операции, чтобы не переключать S1 и S2 в один и тот же интервал времени, иначе произойдет короткое замыкание. Эти меры предосторожности применимы и к другим переключателям.
H Компоненты мостовой схемы
- Здесь подробно описаны основные компоненты, используемые в этой конфигурации схемы.
- Реле Мост
- H, как правило, создается за счет использования реле, соединенных в виде массива последовательностей.
- В некоторых проектах используется реле DPDT, но в основном предпочтение отдается H-мосту на полупроводниковой основе из-за более низкой цены и больших рабочих скоростей.
- Использование каналов N и P
- Конфигурация твердотельного моста H создается путем изменения полярности, как конфигурация печатной платы BJT.
- При этом существуют такие схемы, в которых MOSFET с каналом P настроен на источник питания с большим значением напряжения, а MOSFET N сконфигурирован на источник с меньшим напряжением, которые запускают нагрузку в соответствии с желаемой конфигурацией
- С использованием канала N
- Эта конфигурация конструкции наиболее предпочтительна для H-моста, поскольку N-канальный полевой МОП-транзистор существует в части с высоким и меньшим напряжением.
- Конфигурация схемы этого модуля несколько сложнее, чем у других
Приложения драйвера мостового двигателя H
- Здесь перечислены основные области применения этих модулей.
- Он используется в различных типах дронов для регулирования скорости и таких приложений, как наблюдение и навигация по местности.
- Используется в драйверах преобразователей переменного тока в постоянный.
- Используется в сервоприводах роботов и конвейерных операциях.
Это все о том, как создать схему драйвера двигателя моста H, если у вас есть дополнительные вопросы, задавайте их в комментариях. Спасибо за чтение, хорошего дня.
Новое поступление алюминиевых плит всего за 2 доллара
Купоны на 54 доллара также можно применять к заказам на 3D-печать. Специальное предложение по 3D-печати начинается с 1
Автор: Генри
http://www.
