Как работает регулировка оборотов асинхронного двигателя. Какие существуют способы изменения скорости вращения. Какие схемы регуляторов оборотов наиболее эффективны. Как выбрать оптимальный метод регулировки для конкретного двигателя.
Принцип работы асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей — статора и ротора. Статор представляет собой неподвижную часть с обмотками, создающими вращающееся магнитное поле при подключении к трехфазной сети. Ротор — это вращающаяся часть, в которой под действием магнитного поля статора индуцируются токи, создающие вращающий момент.
Скорость вращения магнитного поля статора называется синхронной скоростью и определяется по формуле:
n1 = 60f / p
где f — частота сети, p — число пар полюсов обмотки статора.
Ротор всегда вращается с небольшим отставанием от магнитного поля статора. Разность между синхронной скоростью и скоростью ротора называется скольжением:
s = (n1 — n) / n1
где n — скорость вращения ротора.
Способы регулирования скорости асинхронного двигателя
Существует несколько основных способов изменения скорости вращения асинхронного двигателя:
- Изменение частоты питающего напряжения
- Изменение числа пар полюсов обмотки статора
- Изменение напряжения, подаваемого на статор
- Введение дополнительного сопротивления в цепь ротора (для двигателей с фазным ротором)
- Каскадное включение двигателей
Рассмотрим подробнее наиболее распространенные методы регулирования.
Частотное регулирование скорости
Частотное регулирование является наиболее эффективным и универсальным способом изменения скорости асинхронного двигателя. Принцип его работы основан на изменении частоты питающего напряжения с помощью преобразователя частоты.
При этом для сохранения постоянства магнитного потока необходимо одновременно с частотой изменять и величину напряжения. Закон изменения напряжения в зависимости от частоты называется законом частотного управления.

Преимущества частотного регулирования:
- Плавное регулирование в широком диапазоне
- Высокая точность поддержания скорости
- Экономия электроэнергии
- Улучшение динамических характеристик привода
Недостатком является высокая стоимость преобразователей частоты.
Изменение числа пар полюсов
Данный способ позволяет ступенчато изменять скорость вращения путем переключения числа пар полюсов обмотки статора. Для этого на статоре размещают несколько обмоток с разным числом полюсов.
Преимущества:
- Простота реализации
- Высокий КПД при работе на номинальной скорости
Недостатки:
- Ступенчатое регулирование скорости
Регулирование изменением напряжения
При снижении напряжения, подаваемого на статор, уменьшается магнитный поток и, как следствие, вращающий момент двигателя. Это приводит к увеличению скольжения и снижению скорости вращения ротора.
Преимущества:
- Простота реализации
- Плавное регулирование
Недостатки:
- Небольшой диапазон регулирования (до 20-30%)
- Снижение перегрузочной способности двигателя
Схемы регуляторов оборотов асинхронного двигателя
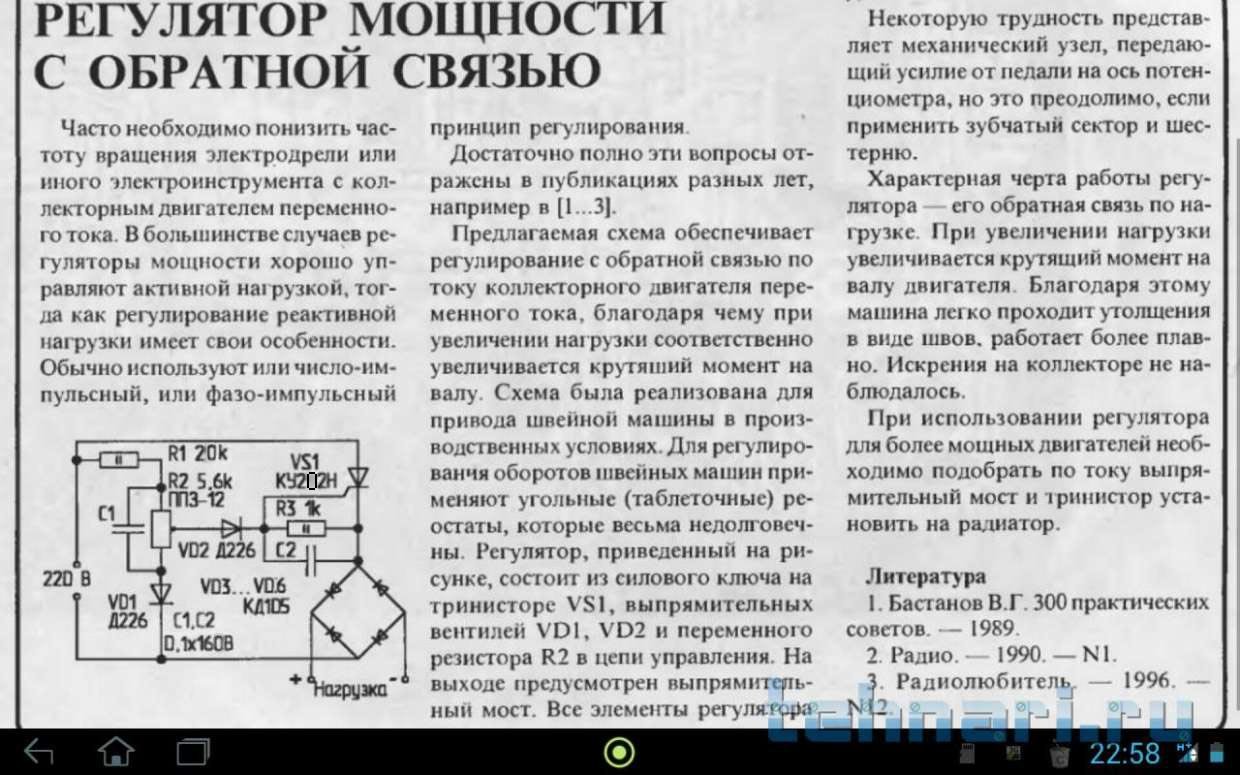
Для реализации различных способов регулирования скорости используются специальные устройства — регуляторы оборотов. Рассмотрим наиболее распространенные схемы регуляторов.
Частотный преобразователь
Частотный преобразователь состоит из следующих основных блоков:
- Выпрямитель
- Звено постоянного тока
- Инвертор
- Система управления
Выпрямитель преобразует переменное напряжение сети в постоянное. Инвертор формирует из постоянного напряжения переменное напряжение регулируемой частоты. Система управления обеспечивает требуемый закон изменения частоты и напряжения.
Тиристорный регулятор напряжения
Тиристорный регулятор позволяет плавно изменять действующее значение напряжения, подаваемого на двигатель. Схема включает:
- Силовую часть на тиристорах
- Систему управления
- Датчик обратной связи по скорости
Изменяя угол открытия тиристоров, можно регулировать напряжение в широких пределах.
Реостатный регулятор для двигателя с фазным ротором
В цепь ротора двигателя включается регулируемое активное сопротивление. При увеличении сопротивления возрастает скольжение и снижается скорость вращения ротора. Схема содержит:
- Реостат
- Контактные кольца на валу двигателя
- Щеточный аппарат
Выбор способа регулирования скорости
При выборе оптимального способа регулирования скорости асинхронного двигателя необходимо учитывать следующие факторы:
- Требуемый диапазон регулирования
- Плавность регулирования
- Экономичность
- Сложность реализации
- Стоимость оборудования
- Особенности конкретного технологического процесса
Для большинства современных приводов оптимальным является частотное регулирование, обеспечивающее высокие энергетические и динамические показатели во всем диапазоне регулирования скорости.
Заключение
Регулирование скорости асинхронных двигателей позволяет значительно расширить область их применения и повысить эффективность работы электроприводов. Правильный выбор способа регулирования и схемы регулятора оборотов обеспечивает оптимальные режимы работы двигателя в конкретных условиях эксплуатации.
Регулировка оборотов асинхронного двигателя: способы и схемы
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
Регулировка оборотов асинхронного двигателя своими руками (схема, видео)
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
устройство и принцип работы прибора, достоинства и недостатки
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.
Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.
https://youtube.com/watch?v=vVeR4jVfTIg
Виды устройств
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
Декор дня рождения своими руками
Закрыть…
Ковбойские остроносые сапогиПринцип работы самодельного замка заключается в следующем. В одной его половине находится постоянный магнит. а в другой — металлическая пластина. Одна из них крепится к двери. Вторая, с удаленной металлической пластиной, оснащается герконом КЭМ-1 и крепится к дверной коробке. Если дверь находится в закрытом положении, две части замка прижимаются, магнит оказывает действие на геркон, замыкая его контакты. Если же дверь открывается, магнит уходит, и контакты геркона размыкаются.
Батарея, системный блок компьютера, даже блок питания для ноутбука — это все лучшие друзья. Я уже молчу, про такие хорошие грелки, как мы с мужем.
Берите наполнитель и набивайте куклу. Когда полностью равномерно распределите набивку, зашейте изделие. Ручки необходимо пришивать к туловищу практически около самой шеи.
Из одной паллеты, отшлифованной, пропитанной и лакированной, получается садовый столик вроде журнального, слева на рис. Если в наличии есть пара, из них буквально за полчаса можно сделать настенный рабочий стол-стеллаж, в центре и справа. Цепи для него также можно сплести самому из мягкой проволоки, обтянутой трубкой из ПВХ или, лучше, термоусаживаемой. Для полного поднятия столешницы мелкий инструмент укладывают на полку настенной паллеты.
Ну а если стеклянную чашу, вазу, конфетницу, сосуд для пунша или обыкновенные бокалы наполнить водой, разбросав на дне морскую гальку, и отпустить в «свободное плавание» свечи-таблетки, получим волшебную подсветку для романтического Нового года. Для более интересного и неожиданного эффекта можно поэкспериментировать с цветом воды.Как производится установка шипов на резину?
Игрушки ручной работы для детей — это красиво, дешево и приятно. Каждый ребенок нуждается в оригинальных и обучающих игрушках, но не всегда есть возможность их приобрести. Сегодня мы покажем вам 5 примеров веселых игрушек, которые вы можете сделать самостоятельно. Они могут быть сделаны из картона, бумаги или дерева. В общем вдохновляйтесь и чаще радуйте своих детей.
Для основания такой конструкции можно использовать толстую фанеру, а для её верхней части – поликарбонат. Найти в сети солнечные батареи сегодня тоже не проблема.
Внимание! При стыковке панелей не стоит прилагать слишком большие усилия, вы можете повредить место стыка. Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Именно столько ножей должно быть у хозяйки на кухне, чтобы процесс приготовления пищи всегда был простым и приятным.
Для изготовления кормушки своими руками нам потребуется:
Расчет древесины. Доски, носящие название клепки, имеют двояковыпуклые стороны для придания бондарному изделию выпуклости. Чтобы их сделать такими, нужно взять нижнюю часть ствола дерева и расколоть подобием рубки дров. Если его аккуратно пилить, то нарушится природная целостность волокон, что плохо для такого изделия. Сразу приступать к фигурному выпиливанию не стоит – поленья нужно просушить в течение 2 месяцев. Причем сушить не под палящим солнцем, а в темном прохладном помещении.
Как плести браслеты из шнурков
Тот факт, что большинство новогодних костюмов для детей дошкольного возраста легко шьются на основе комбинезона, может значительно сузить и облегчить творческий поиск. Если научится шить комбинезон — основу для новогоднего костюма и придумать (почерпнуть), смастерить своими руками декоративные элементы к нему, то можно сделать удивительные и довольно интересные модели новогодних нарядов для детей. Главное заранее все продумать до мелочей, вооружится знаниями по теме — чтобы результат труда приятно удивил и порадовал всех.
Проектирование шкафа-купе
Картинки
Подарок маме на день рождения своими руками фото инструкция
Похожие новости
.
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.
- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Использование широтно-импульсной модуляции
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа, можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
На рисунке выше изображена схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов;
- частотные преобразователи , использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120 0 , на статор наматывают еще и пусковую П, которая имеет фазную зону 60 0 . Также пусковая обмотка сдвигается относительно рабочей на 90 0 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
| Принцип действия трехфазного асинхронного двигателя |
| Пуск звезда-треугольник трехфазного электродвигателя | |||||
| |||||
| РЕГУЛИРОВКА ОБОРОТОВ ЭЛЕКТРОДВИГАТЕЛЕЙ | |||||
| |||||
| Регулятор оборотов электродрели своими руками | |||||
| |||||
| Ремонт и проверка работоспособности коллекторных электродвигателей стиральных машин. | |||||
| |||||
| Как должна происходить разборка электродвигателя | |||||
| |||||
| Системы плавного пуска высоковольтных электродвигателей на основе устройств серии УППВЭ | |||||
| |||||
| Электрическая схема пуска трехфазного электродвигателя | |||||
| |||||
| Устройство асинхронного электродвигателя | |||||
| |||||
| ЭЛЕКТРОДВИГАТЕЛЬ БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ДБМ254-120-57 |
| ШИМ-регуляторы оборотов маломощных коллекторных электродвигателей | |||||
| |||||
Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Распиновка регулятораЗатем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Как понизить обороты электродвигателя 380в
Электрика своими руками
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Схема регулятора скорости трехфазного асинхронного двигателя
В этом посте мы обсудим создание простой схемы регулятора скорости трехфазного асинхронного двигателя, которая также может применяться для однофазного асинхронного двигателя или буквально для любого типа двигателя переменного тока.
Когда доходит до управления скоростью асинхронных двигателей, обычно используются матричные преобразователи, включающие множество сложных каскадов, таких как LC-фильтры, двунаправленные массивы переключателей (с использованием IGBT) и т. Д.
Все они используются для достижения в конечном итоге прерванный сигнал переменного тока, рабочий цикл которого можно регулировать с помощью сложной схемы микроконтроллера, что в конечном итоге обеспечивает необходимое управление скоростью двигателя.
Однако мы можем поэкспериментировать и попытаться реализовать регулирование скорости трехфазного асинхронного двигателя с помощью гораздо более простой концепции, используя усовершенствованные ИС оптопары детектора перехода через нуль, силовой симистор и схему ШИМ.
Использование детектора перехода через ноль Оптопара
Благодаря серии оптопар MOC, которые сделали схемы управления симисторами чрезвычайно безопасными и простыми в настройке, а также обеспечивают беспроблемную интеграцию PWM для предполагаемых элементов управления.
В одном из своих предыдущих постов я обсуждал простую схему контроллера двигателя с плавным пуском с ШИМ, в которой реализована микросхема MOC3063 для обеспечения эффективного плавного пуска подключенного двигателя.
Здесь мы также используем идентичный метод для обеспечения соблюдения предложенной схемы регулятора скорости трехфазного асинхронного двигателя, на следующем изображении показано, как это можно сделать:
На рисунке мы видим три идентичных каскада оптопары MOC, сконфигурированных в их стандартных симисторах режим регулятора, а входная сторона интегрирована с простой схемой ШИМ IC 555.
Три цепи MOC сконфигурированы для обработки трехфазного входа переменного тока и подачи его на подключенный асинхронный двигатель.
Вход ШИМ на стороне управления изолированными светодиодами оптического блока определяет коэффициент прерывания трехфазного входа переменного тока, который обрабатывается MOC ICS.
Использование ШИМ-контроллера IC 555 (переключение при нулевом напряжении)
Это означает, что, регулируя потенциометр ШИМ, связанный с микросхемой 555, можно эффективно управлять скоростью асинхронного двигателя.
Выход на его выводе №3 имеет изменяющийся рабочий цикл, который, в свою очередь, соответствующим образом переключает выходные симисторы, что приводит либо к увеличению среднеквадратичного значения переменного тока, либо к его уменьшению.
Увеличение RMS с помощью более широких PWM позволяет получить более высокую скорость двигателя, в то время как уменьшение RMS переменного тока с помощью более узких PWM производит противоположный эффект, то есть вызывает пропорциональное замедление двигателя.
Вышеупомянутые функции реализованы с большой точностью и безопасностью, поскольку ИС имеют множество внутренних сложных функций, специально предназначенных для управления симисторами и тяжелыми индуктивными нагрузками, такими как асинхронные двигатели, соленоиды, клапаны, контакторы, твердотельные реле и т. Д.
IC также обеспечивает идеально изолированную работу для каскада постоянного тока, что позволяет пользователю выполнять настройки, не опасаясь поражения электрическим током.
Этот принцип можно также эффективно использовать для управления скоростью однофазного двигателя, используя одну MOC IC вместо 3.
Конструкция фактически основана на теории пропорционального по времени симистора. Верхняя схема ШИМ IC555 может быть отрегулирована для получения 50% рабочего цикла при гораздо более высокой частоте, в то время как нижняя схема ШИМ может использоваться для реализации операции управления скоростью асинхронного двигателя посредством регулировки соответствующего потенциометра.
Рекомендуется, чтобы эта микросхема 555 имела относительно более низкую частоту, чем верхняя схема микросхемы 555. Это можно сделать, увеличив емкость конденсатора на выводе 6/2 примерно до 100 нФ.
ПРИМЕЧАНИЕ: ДОБАВЛЕНИЕ ПОДХОДЯЩИХ ИНДУКТОРОВ ПОСЛЕДОВАТЕЛЬНО С ФАЗОВЫМИ ПРОВОДАМИ МОЖЕТ Существенно улучшить ХАРАКТЕРИСТИКИ УПРАВЛЕНИЯ СКОРОСТЬЮ СИСТЕМЫ.Datasheet для MOC3061
Предполагаемая форма волны и управление фазой с использованием вышеуказанной концепции:
Вышеописанный метод управления трехфазным асинхронным двигателем на самом деле довольно груб, поскольку он не имеет контроля В / Гц .
Он просто использует включение / выключение сети с разной скоростью для выработки средней мощности двигателя и управления скоростью, изменяя этот средний переменный ток, подаваемый на двигатель.
Представьте, что вы включаете / выключаете двигатель вручную 40 или 50 раз в минуту. Это приведет к тому, что ваш двигатель замедлится до некоторого относительного среднего значения, но будет двигаться непрерывно. Вышеупомянутый принцип работает точно так же.
Более технический подход заключается в разработке схемы, которая обеспечивает надлежащий контроль соотношения В / Гц и автоматически регулирует его в зависимости от скорости скольжения или любых колебаний напряжения.
Для этого мы в основном используем следующие этапы:
- Н-мостовой или полный мост IGBT-драйвер Схема
- Трехфазный генераторный каскад для питания полной мостовой схемы
- В / Гц ШИМ-процессор
Использование полного моста Схема управления IGBT
Если процедуры настройки вышеупомянутой конструкции на основе симистора выглядят пугающими, можно попробовать следующее управление скоростью асинхронного двигателя на основе полного моста с ШИМ:
В схеме, показанной на приведенном выше рисунке, используется один полный кристалл. -мостовой драйвер IC IRS2330 (последняя версия — 6EDL04I06NT), который имеет все встроенные функции для обеспечения безопасной и безупречной работы трехфазного двигателя.
ИС требуется только синхронизированный трехфазный логический вход через его выводы HIN / LIN для генерации необходимого трехфазного колебательного выхода, который, в конечном итоге, используется для работы полной мостовой IGBT-сети и подключенного трехфазного двигателя.
ШИМ-инжектор с регулировкой скорости реализуется через 3 отдельных полумостовых каскада драйверов NPN / PNP, управляемых с помощью SPWM-питания от генератора ШИМ IC 555, как показано в наших предыдущих разработках. Этот уровень ШИМ может в конечном итоге использоваться для управления скоростью асинхронного двигателя.
Прежде чем мы изучим фактический метод управления скоростью для асинхронного двигателя, давайте сначала разберемся, как автоматическое регулирование В / Гц может быть достигнуто с помощью нескольких схем IC 555, как описано ниже.
Схема автоматического ШИМ-процессора В / Гц (Замкнутый контур)
В приведенных выше разделах мы изучили конструкции, которые помогут асинхронному двигателю двигаться со скоростью, указанной производителем, но он не будет регулироваться в соответствии с постоянным соотношением В / Гц, если не будет следующая ШИМ процессор интегрирован с входным каналом H-Bridge PWM.
Вышеупомянутая схема представляет собой простой генератор ШИМ, использующий пару IC 555. IC1 генерирует частоту ШИМ, которая преобразуется в треугольные волны на выводе №6 IC2 с помощью R4 / C3.
Эти треугольные волны сравниваются с синусоидальной пульсацией на выводе № 5 микросхемы IC2. Эти пульсации образца получаются путем выпрямления трехфазной сети переменного тока в пульсации переменного тока 12 В и подаются на вывод № 5 микросхемы IC2 для необходимой обработки.
Путем сравнения двух сигналов, SPWM соответствующего размера генерируется на выводе № 3 IC2, который становится управляющим ШИМ для сети H-моста.
Как работает схема В / Гц
При включении питания конденсатор на выводе №5 начинает с передачи нулевого напряжения на выводе №5, что вызывает наименьшее значение SPWM в Н-мостовой схеме, которая, в свою очередь, включает асинхронный двигатель для запуска с медленным плавным пуском.
По мере того, как этот конденсатор заряжается, потенциал на выводе № 5 повышается, что пропорционально увеличивает SPWM и позволяет двигателю постепенно набирать скорость.
Мы также можем видеть цепь обратной связи тахометра, которая также интегрирована с контактом № 5 микросхемы IC2.
Этот тахометр контролирует скорость ротора или скорость скольжения и генерирует дополнительное напряжение на выводе № 5 IC2.
Теперь, когда скорость двигателя увеличивается, скорость скольжения пытается синхронизироваться с частотой статора, и в процессе она начинает набирать скорость.
Это увеличение индукционного скольжения пропорционально увеличивает напряжение тахометра, что, в свою очередь, заставляет IC2 увеличивать выходной сигнал SPWM, что, в свою очередь, дополнительно увеличивает скорость двигателя.
Вышеупомянутая регулировка пытается поддерживать отношение В / Гц на довольно постоянном уровне до тех пор, пока, наконец, SPWM от IC2 не сможет увеличиваться дальше.
В этот момент скорость скольжения и скорость статора достигают установившегося состояния, и это поддерживается до тех пор, пока входное напряжение или скорость скольжения (из-за нагрузки) не изменятся. В случае их изменения схема процессора V / Hz снова вступает в действие и начинает регулировать соотношение для поддержания оптимального отклика скорости асинхронного двигателя.
Тахометр
Цепь тахометра также может быть дешево построена с использованием следующей простой схемы и интегрирована с описанными выше этапами схемы:
Как реализовать контроль скорости
В предыдущих параграфах мы поняли процесс автоматического регулирования, который может eb достигается за счет интеграции обратной связи тахометра в цепь автоматического регулируемого контроллера SPWM.
Теперь давайте узнаем, как можно управлять скоростью асинхронного двигателя, изменяя частоту, что в конечном итоге заставит SPWM упасть и поддерживать правильное соотношение В / Гц.
На следующей схеме поясняется каскад управления скоростью:
Здесь мы можем увидеть схему 3-фазного генератора с использованием микросхемы IC 4035, частота сдвига фаз которой может быть изменена путем изменения входного тактового сигнала на его выводе №6.
Трехфазные сигналы подаются на логические элементы 4049 IC для создания требуемых HIN, LIN-каналов для полной мостовой драйверной сети.
Это означает, что, соответствующим образом изменяя тактовую частоту IC 4035, мы можем эффективно изменить рабочую трехфазную частоту асинхронного двигателя.
Это реализуется через простую нестабильную схему IC 555, которая подает регулируемую частоту на вывод № 6 микросхемы IC 4035 и позволяет регулировать частоту с помощью подключенного потенциометра 100K. Конденсатор C необходимо рассчитать таким образом, чтобы регулируемый диапазон частот соответствовал характеристикам подключенного асинхронного двигателя.
Когда потенциометр частоты изменяется, эффективная частота асинхронного двигателя также изменяется, что, соответственно, изменяет скорость двигателя.
Например, когда частота уменьшается, вызывает снижение скорости двигателя, что, в свою очередь, вызывает пропорциональное снижение напряжения на выходе тахометра.
Это пропорциональное уменьшение выходного сигнала тахометра заставляет SPWM сужаться и, таким образом, пропорционально снижает выходное напряжение на двигатель.
Это действие, в свою очередь, обеспечивает поддержание соотношения В / Гц при управлении скоростью асинхронного двигателя посредством управления частотой.
Предупреждение. Вышеупомянутая концепция основана только на теоретических предположениях, действуйте с осторожностью.
Если у вас есть какие-либо сомнения относительно конструкции контроллера скорости трехфазного асинхронного двигателя, вы можете опубликовать то же самое в своих комментариях.
(PDF) Сравнение различных обмоток с резьбой для регулировки потока в асинхронных двигателях
FERREIRA et al.: СРАВНЕНИЕ РАЗЛИЧНЫХ НАРУЖНЫХ ОБМОТКОВ ДЛЯ РЕГУЛИРОВКИ ПОТОКА В ИНДУКЦИОННЫХ ДВИГАТЕЛЯХ 391
улучшение их КПД при частичной нагрузке и коэффициента мощности, а при необходимости
обеспечивает номинальный крутящий момент, что особенно интересно, если двигатель длительное время работает с нагрузкой. ниже
, чем 35–45%, и короткие периоды с нагрузкой, близкой к 100%.
Решения на основе двух последовательно соединенных по фазе цепей с номиналом
(случаи C и D) лучше, чем решения на основе
(случаи A и B) для целей регулировки потока
из-за того, что превосходная производительность в режиме высокого потока.Соотношение
низкого / высокого потока можно легко установить путем правильного выбора
баланса числа витков в обеих отдельных цепях. Решения
, основанные на соединении звездой обмотки между двумя катушками
набора каждой фазы (случаи E и E ∗) также представляют интерес, с характеристиками
, аналогичными случаям C и D, но с немного более высоким значением
.пространственных гармоник в ММП воздушного зазора. Для соединения с высокой пропускной способностью
Case E ∗ предлагает немного более высокую эффективность, чем Case
E.
В режиме высокого потока обмотка случая D дает в √3 раза
меньшие потери Джоулей, чем обмотка случая C, но в √3 раза
более высокие потери Джоулей в обмотке, чем обычные Y / Dwinding.
Обмотки с ответвлениями также могут применяться в двигателях с постоянным током
с линейным пуском для повышения эффективности и повышения коэффициента мощности при малых нагрузках [17] и даже
, когда запуск должен быть принудительным, чтобы компенсировать тормозной момент
из-за магнитов. . Иногда это делается путем соединения
последовательных цепей параллельно (количество витков фазы
уменьшено вдвое) для увеличения потока воздушного зазора, для чего требуется более двух контакторов
.
БЛАГОДАРНОСТЬ
Авторы хотели бы поблагодарить г-на Тьяго Л. Ф. Круза,
M.Sc. Студент Политехнического института Коимбры, за
выполнилэкспериментальных моторных испытаний.
ССЫЛКИ
[1] ABB: «Решения для запуска двигателей — Руководство по применению», ABB Entrelec,
1SBC101001C0202, Отпечатано во Франции, 2009 г.
[2] Вращающиеся электрические машины — Часть 12: Пусковые характеристики одиночных —
3-фазные асинхронные двигатели с короткозамкнутым ротором, скорость, IEC 60034–12 Ed.2.0, (2002) ,.
[3] Низковольтные распределительные устройства — Часть 4–1: Контакторы и пускатели двигателей
— Электромеханические контакторы и пускатели двигателей,
IEC60947–4–1, Ред. 3.1, (2002).
[4] Ф. Дж. Т. Э. Феррейра и А. Т. де Алмейда, «Метод полевой оценки
соединения обмотки статора трехфазных асинхронных двигателей для максимизации КПД и коэффициента мощности
», IEEE Trans. Energy Convers., Т. 21, нет. 2,
с.370–379, июнь 2006 г.
[5] FJTE Ferreira и AT de Almeida, «Новый многопоточный, трехфазный,
-фазный, с короткозамкнутым ротором, индукционный двигатель с короткозамкнутым ротором для повышения эффективности и максимального коэффициента мощности.
imization», IEEE Trans . Energy Convers., Т. 23, нет. 1, стр. 101–109,
март 2008 г.
[6] М. Систелекан, FJTE Феррейра и М. Попеску, «Трехфазные машины переменного тока с регулируемым потоком
с комбинированной многоступенчатой обмоткой звезда-треугольник соединения », IEEE Trans.Energy Convers., Т. 25, нет. 2, pp. 348–355, Jun.
2010.
[7] Д. Г. Доррелл и Ф. Дженсен, «Моделирование асинхронных двигателей с расщепленной фазой с обмотками
с центральным отводом и падениями асинхронного момента», IEEE Trans. Инд.
Заявление, т. 45, нет. 1. С. 168–177, янв. / Февр. 2009.
[8] П. Л. Алджер, «Расчет производительности для пуска по частям обмотки трехфазных двигателей
», AIEE Trans., Vol. 75, нет. 3, Часть III, стр. 1535–1543, февраль 1957.
[9] J.Дж. Куртин, «Десять частичных обмоток в образце 4-полюсного асинхронного двигателя
», AIEE Trans., Вып. 74, нет. 3, Часть. III, стр. 1248–1254, декабрь 1955.
[10] К. К. Раджараман, «Теория и конструкция запуска частичной обмотки», IEEE
Trans. Конв. Энергии, т. 14, вып. 1, стр. 31–36, март 1999 г.
[11] М. В. Цистелекан, М. А. Сарбу и Б. Косан, «Оптимизация линии тягового двигателя серии IN-
, запускаемой с использованием параллельных цепей с частичной обмоткой», в Proc.
Inter.Конф. OPTIM, Брашов, Румыния, май 2004 г., стр. 334–339.
[12] А. Стермецки, И. Тикар, И. Заградисник и П. Китак, «Конструкция
части обмотки асинхронного двигателя на основе МКЭ для снижения пускового тока», IEEE
Trans. Магн., Т. 42, нет. 4, pp. 1299–1302, Apr. 2006.
[13] М. В. Цистелекан, Х. Б. Косан и М. Попеску, «Пуск с частичной обмоткой
, усовершенствование трехфазного асинхронного двигателя с короткозамкнутым ротором», в Proc. 8-я
Интер. Symp. Adv.Электромех. Motion Syst. Elect, Drives Joint Symp.,
Conf., 2009, стр. 1–6.
[14] М. Э. Эль-Хавари, Принципы электрических машин с силовой электроникой
Приложения. Энглвуд Клиффс, Нью-Джерси, США: Прентис Холл-Рестон, 1986.
[15] Э. Леви и М. Панцер, Электромеханическое преобразование энергии. Малабар,
FL, США: Robert E Krieger Publishing Co., 1982.
[16] М. Чирринсионе, М. Пуччи, К. Серпорта и А. Мирауи, «Эффекты прорезания ротора
в асинхронных двигателях: космос -векторное моделирование, конечно-элементный анализ и эксперименты, Proc.IEEE Annu. Ind. Electron. Conf., Орландо,
,, Флорида, США, 10–13 ноября 2008 г., стр. 1361–1367.
[17] Ф. Феррейра, Г. Баомин и А. де Алмейда, «Управление режимом соединения обмотки статора
в двигателях с постоянными магнитами с линейным пуском для повышения их эффективности и коэффициента мощности
», IEEE Trans. Energy Convers., Т. 28, вып. 3,
pp. 523–534, сентябрь 2013 г.
[18] М. Райн, Г. Хан и Н. Юн, «Метод определения уровней напряжения
относительно ALT с помощью оптического датчика температуры», Дж.Избрать. Англ.
Технол., Т. 3, вып. 2, pp. 184–191, 2008.
Фернандо Дж. Т. Э. Феррейра (SM’09) получил степень доктора философии
. степень в области электротехники Университета
Коимбры, Коимбра, Португалия.
В настоящее время он является профессором кафедры электротехники
Политехнического института
Коимбры (IPC / ISEC), Коимбра, Португалия. С
1998 г. он работал научным сотрудником в Институте
систем и робототехники Университета Коимбры (ISR-
UC), Коимбра, Португалия, работая в области двигателей и приводов
.Он участвовал в нескольких проектах Европы
, связанных с технологиями энергоэффективных двигателей
. Он является соавтором более 50 статей, опубликованных в международных журналах, а также отчетов конференций и представленных на встречах.
Проф. Феррейра был удостоен награды за лучшую работу на технической конференции IEEE / IAS
в 2001 году по промышленным и коммерческим энергетическим системам и награды
за лучшую презентацию (за техническую компетентность, продемонстрированную в стендовой презентации
). ) на выставке Inter.Конференция по электрическим машинам.
Михаил В. Цистелекан (M’94) получил докторскую степень de-
gree в области электрических машин и приводов в Университете «Политех-
nica» Бухареста, Бухарест, Румыния,
в 1990 году.
Он работал старшим научным сотрудником в Научно-исследовательском институте электрических машин
(ICPE-
ME) в Бухаресте, а сейчас на пенсии. Его основные области интересов
включают оптимизацию конструкции индукционных машин
, электрических машин с постоянными магнитами
и электрических приводов, будучи автором или соавтором более 30 румынских патентов, около 50
статьи, опубликованные в реферируемых журналах и на международных конференциях, и три учебника
.
Проф. Систелекан был удостоен награды за лучшую презентацию плаката (
— техническая компетентность, показанная в стендовой презентации) на выставке Inter 2010 года.
Конференция по электрическим машинам.
Анибал Т. де Алмейда (SM’03) получил докторскую степень.
степень в области электротехники от Imperial Col-
lege, Лондонский университет, Лондон, Великобритания
В настоящее время он является профессором кафедры электротехники и компьютеров
Университета
Коимбры, Коимбра, Португалия.Он является соавтором
шести книг по энергоэффективности и более 200
статей, опубликованных в международных журналах, а также
отчетов и представленных на встречах. Он координировал
восьми европейских проектов, связанных с энергетикой
эффективных моторных технологий.
Проф. Де Алмейда был удостоен награды за лучшую работу на Технической конференции по промышленным и коммерческим системам питания IEEE / IAS в 2001 г.
IEEE / IAS.
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основы электродвигателя переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
ПродуктыAC Motor имеют два варианта управления с обратной связью. Эти опции представляют собой преобразователь двигателя переменного тока или энкодер двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются.
В резольверах двигателей переменного тока используется второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе в воздушном зазоре. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, пересекающего воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому им следует отдавать предпочтение в любом приложении.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы двигателей переменного тока
Электродвигатели переменного тока выпускаются трех различных типов: индукционные, синхронные и промышленные. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного токаразработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Асинхронные двигатели используются во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиоповоротные столы
— Вентиляторы
Их также можно найти в промышленности:
— Насосы
— Воздуходувки
— Конвейеры
— Компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, которое контролирует скорость двигателя переменного тока.Контроллер переменного тока может также называться частотно-регулируемым приводом, приводом с регулируемой скоростью, преобразователем частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение регулируемой частоты. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, работает в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируя повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% своего номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно контролировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться чрезмерный крутящий момент защищен
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции VFD включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (PWM). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, промежуточного звена постоянного тока и инвертора, но конструкция каждого из них варьируется от привода к приводу. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Для поддержания правильного соотношения напряжения и частоты (Вольт / Герц) напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение на двигателе.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители устанавливают либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогостоящие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение на двигателе.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная мощность ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Привод с частотно-регулируемым приводом с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций, возникающих после выпрямителя, и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенеративный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой крутящий момент (индукция)
— Отсутствие скольжения (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывания вращения (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь в отношении продуктовой линейки двигателей переменного тока, а также всех продуктов, производимых или распространяемых Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что прилагаются все усилия, чтобы дать надежные рекомендации относительно линейки продуктов AC Motor, а также других продуктов для управления движением, а также для точного предоставления технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1. Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3. Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. Если возможно, смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запуститься, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Двигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри корпуса двигателя, ротор установлен внутри, а между ними имеется зазор, отделяющий их от соприкосновения. Кожух представляет собой корпус двигателя, содержащий два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работая за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному отношению x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; Тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с разделенной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Крутящий момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, если двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Требуемое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное нагревание.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к грязи и маслам, забивающим воздушный поток. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, входных / выходных коммуникациях и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру.
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленный зажим на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Крепление двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать двигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного человека. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и субпанелью, сделайте субпанель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные степени защиты IP. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Никакие работы не должны выполняться при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История двигателя переменного тока
Изобретение двигателя переменного тока
Асинхронные двигатели переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Развитие двигателя переменного тока
Двигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателей переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока представляют собой систему 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателей переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его акцент на исследованиях и разработках обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными проектными требованиями. Иногда настройка так же проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Двигатель переменного тока Anaheim Automation
Инженерыценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат благодаря индивидуальной конструкции электродвигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation принимает активное участие в решении их конкретных системных требований.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной базой складских запасов, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписывать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation заказывает линейку продуктов AC Motor разнообразно: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, маркировку или требования защиты от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную киносъемку и т. Д. проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насосов, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики просят, чтобы мы использовали двигатели переменного тока «частной торговой марки», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Тест двигателя переменного тока
Q: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
Q: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
В: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
В: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его работы необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы о двигателях переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
Q: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
В: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, что делает его горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
В: Почему некоторые редукторы электродвигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.) Это снижение скорости является результатом использования нескольких передач; количество передач в зависимости от величины снижения скорости. Однако вращение последней шестерни определяет направление выходного вала.
В: Повлияют ли на асинхронный двигатель переменного тока большие колебания напряжения источника питания?
A: Напряжение источника питания влияет на крутящий момент, создаваемый двигателем. Крутящий момент примерно в два раза больше напряжения источника питания. Таким образом, при использовании двигателей с большими колебаниями напряжения питания важно помнить, что создаваемый крутящий момент будет изменяться.
Коэффициент мощности — индуктивная нагрузка
Коэффициент мощности системы электроснабжения переменного тока определяется как отношение активной (истинной или реальной) мощности к полной мощности , где
- Активная (действительная или истинная) мощность измеряется в ваттах ( Вт, ) и представляет собой мощность, потребляемую электрическим сопротивлением системы, выполняющей полезную работу
- Полная мощность измеряется в вольт-амперах (ВА) и представляет собой напряжение в системе переменного тока, умноженное на всем током, который в нем течет.Это векторная сумма активной и реактивной мощности
- Реактивная мощность измеряется в вольт-амперах реактивной ( VAR ). Реактивная мощность — это мощность, накапливаемая и разряжаемая асинхронными двигателями, трансформаторами и соленоидами.
Реактивная мощность требуется для намагничивания электродвигателя, но не выполняет никакой работы. Реактивная мощность, необходимая для индуктивных нагрузок, увеличивает количество полной мощности — и требуемую подачу в сеть от поставщика энергии к распределительной системе.
Увеличение реактивной и полной мощности приведет к уменьшению коэффициента мощности — PF .
Коэффициент мощности
Обычно коэффициент мощности — PF — определяют как косинус фазового угла между напряжением и током — или « cosφ »:
PF = cos φ
где
PF = коэффициент мощности
φ = фазовый угол между напряжением и током
Коэффициент мощности, определенный IEEE и IEC, представляет собой соотношение между приложенной активной (истинной) мощностью — и полная мощность , и в общем случае может быть выражена как:
PF = P / S (1)
, где
PF = коэффициент мощности
P = активная (истинная или действительная) мощность (Вт)
S = полная мощность (ВА, вольт-амперы)
Низкий коэффициент мощности — это результат lt индуктивных нагрузок, таких как трансформаторы и электродвигатели.В отличие от резистивных нагрузок, создающих тепло за счет потребления киловатт, индуктивные нагрузки требуют протекания тока для создания магнитных полей для выполнения желаемой работы.
Коэффициент мощности является важным измерением в электрических системах переменного тока, потому что
- общий коэффициент мощности меньше 1 указывает на то, что поставщик электроэнергии должен обеспечить большую генерирующую мощность, чем фактически требуется
- искажение формы сигнала тока, которое способствует снижению коэффициента мощности, составляет вызванные искажением формы сигнала напряжения и перегревом в нейтральных кабелях трехфазных систем.
Международные стандарты, такие как IEC 61000-3-2, были установлены для управления искажением формы сигнала тока путем введения ограничений на амплитуду гармоник тока.
Пример — коэффициент мощности
Промышленное предприятие потребляет 200 А при 400 В , а трансформатор питания и резервный ИБП рассчитаны на 400 В x 200 A = 80 кВА .
Если коэффициент мощности — PF — нагрузки составляет 0,7 — только
Система потребляет80 кВА × 0,7
= 56 кВт
реальной мощности. Если коэффициент мощности близок к 1 (чисто резистивная цепь), система питания с трансформаторами, кабелями, распределительным устройством и ИБП может быть значительно меньше.
- Любой коэффициент мощности меньше 1 означает, что проводка схемы должна пропускать больший ток, чем тот, который потребовался бы при нулевом реактивном сопротивлении в цепи для передачи того же количества (истинной) мощности на резистивную нагрузку.
Зависимость поперечного сечения проводника от коэффициента мощности
Требуемая площадь поперечного сечения проводника с более низким коэффициентом мощности:
| Коэффициент мощности | 1 | 0,9 | 0.8 | 0,7 | 0,6 | 0,5 | 0,4 | 0,3 |
| Поперечное сечение | 1 | 1,2 | 1,6 | 2,04 | 2,8 | 4,0 | 4,0 |
Низкий коэффициент мощности дорог и неэффективен, и некоторые коммунальные предприятия могут взимать дополнительную плату, если коэффициент мощности меньше 0,95 . Низкий коэффициент мощности снизит пропускную способность электрической системы, увеличивая ток и вызывая падение напряжения.
«Опережающий» или «запаздывающий» коэффициенты мощности
Коэффициент мощности обычно указывается как «опережающий» или «запаздывающий», чтобы показать знак фазового угла.
- При чисто резистивной нагрузке полярность тока и напряжения изменяется ступенчато, а коэффициент мощности будет 1 . Электрическая энергия течет в одном направлении по сети в каждом цикле.
- Индуктивные нагрузки — трансформаторы, двигатели и обмотки — потребляют реактивную мощность, форма кривой тока которой отстает от напряжения.
- Емкостные нагрузки — батареи конденсаторов или проложенные кабели — генерируют реактивную мощность с фазой тока, опережающей напряжение.
Индуктивные и емкостные нагрузки накапливают энергию в магнитных или электрических полях в устройствах во время частей циклов переменного тока. В течение остальных циклов энергия возвращается обратно в источник питания.
В системах с преимущественно индуктивными нагрузками — как правило, на промышленных предприятиях с большим количеством электродвигателей — запаздывающее напряжение компенсируется конденсаторными батареями.
Коэффициент мощности для трехфазного двигателя
Полная мощность, необходимая индуктивному устройству, например, двигателю или аналогичному, состоит из
- Активная (истинная или действительная) мощность (измеряется в киловаттах, кВт)
- Реактивная мощность — Нерабочая мощность, вызванная током намагничивания, необходимая для работы устройства (измеряется в киловарах, кВАр)
Коэффициент мощности трехфазного электродвигателя может быть выражен как:
PF = P / [(3) 1/2 UI] (2)
, где
PF = коэффициент мощности
P = приложенная мощность (Вт, Вт)
U = напряжение (В)
I = ток (А, амперы)
— или альтернативно:
P = (3) 1/2 UI PF
= (3) 1/2 U I cos φ (2b)
U, l и cos φ обычно указаны на паспортной табличке двигателя.
Типичный коэффициент мощности двигателя
| Мощность (л.с.) | Скорость (об / мин) | Коэффициент мощности (cos φ ) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Без нагрузки | нагрузка 1/2 нагрузки | 3/4 нагрузки | полной нагрузки | |||||||||||||||
| 0-5 | 1800 | 0,15 — 0,20 | 0,5 — 0,6 | 0,72 | 0,82 | 0,84 | ||||||||||||
| 1800 | 0.15 — 0,20 | 0,5 — 0,6 | 0,74 | 0,84 | 0,86 | |||||||||||||
| 20-100 | 1800 | 0,15 — 0,20 | 0,5 — 0,6 | 0,79 31 | 9 100-300 | 1800 | 0,15 — 0,20 | 0,5 — 0,6 | 0,81 | 0,88 | 0,91 | |||||||
Коэффициент мощности по отраслям
Типичные неулучшенные коэффициенты мощности:
Промышленность 25Преимущества коррекции коэффициента мощности
- Снижение счетов за электроэнергию — отсутствие штрафа за низкий коэффициент мощности от энергокомпании
- Повышенная мощность системы — дополнительные нагрузки может быть добавлен без перегрузки системы
- улучшенная рабочая характеристика системы s за счет уменьшения потерь в линии — из-за меньшего тока
- улучшенные рабочие характеристики системы за счет увеличения напряжения — предотвращение чрезмерных падений напряжения
Коррекция коэффициента мощности с помощью конденсатора
| Поправочный коэффициент конденсатора | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Коэффициент мощности до улучшения (cosΦ) | Коэффициент мощности после улучшения (cosΦ) | ||||||||||||||||||||||||||||||
| 1.0 | 0,99 | 0,98 | 0,97 | 0,96 | 0,95 | 0,94 | 0,93 | 0,92 | 0,91 | 0,90 | 8 | 0,90 | 2128 9012 931 1,509 311,512 | 8 9012 931 1,5 | 1,44 | 1,40 | 1,37 | 1,34 | 1,30 | 1,28 | 1,25 | ||||||||||
| 0,55 | 1,52 | 1.38 | 1,32 | 1,28 | 1,23 | 1,19 | 1,16 | 1,12 | 1,09 | 1,06 | 1,04 | ||||||||||||||||||||
| 0,60 31 9123 | 9123 1,01 | 0,97 | 0,94 | 0,91 | 0,88 | 0,85 | |||||||||||||||||||||||||
| 0,65 | 1,17 | 1,03 | 0.97 | 0,92 | 0,88 | 0,84 | 0,81 | 0,77 | 0,74 | 0,71 | 0,69 | ||||||||||||||||||||
| 0,70 | 1,02 9123 | 0,66 | 0,62 | 0,59 | 0,56 | 0,54 | |||||||||||||||||||||||||
| 0,75 | 0,88 | 0,74 | 0,67 | 0.63 | 0,58 | 0,55 | 0,52 | 0,49 | 0,45 | 0,43 | 0,40 | ||||||||||||||||||||
| 0,80 | 0,75 | 0,61 31 9122 | 0,45 | 0,61 31 9122 | 0,5031 | 0,5031 | 91220,49 0,35 | 0,32 | 0,29 | 0,27 | |||||||||||||||||||||
| 0,85 | 0,62 | 0,48 | 0,42 | 0,37 | 0.33 | 0,29 | 0,26 | 0,22 | 0,19 | 0,16 | 0,14 | ||||||||||||||||||||
| 0,90 | 0,48 | 0,34 | 0,28 31 | 0,06 | 0,02 | ||||||||||||||||||||||||||
| 0,91 | 0,45 | 0,31 | 0,25 | 0,21 | 0,16 | 0,13 | 0.09 | 0,06 | 0,02 | ||||||||||||||||||||||
| 0,92 | 0,43 | 0,28 | 0,22 | 0,18 | 0,13 | 0,10 | 3,06 0,130,10 | 0,06 | 91230,25 | 0,19 | 0,15 | 0,10 | 0,07 | 0,03 | |||||||||||||||||
| 0,94 | 0.36 | 0,22 | 0,16 | 0,11 | 0,07 | 0,04 | |||||||||||||||||||||||||
| 0,95 | 0,33 | 0,18 | 9184 9128 4 9124 9128 4 9128 9128 9128 9128 9124 9184 9184 9124 9184 9123 9124 9184 9184 9124 918 4 | 0,96 | 0,29 | 0,15 | 0,09 | 0,04 | |||||||||||||||||||||||
| 0.97 | 0,25 | 0,11 | 0,05 | ||||||||||||||||||||||||||||
| 0,98 | 0,20 | 0,06 | 48 | ||||||||||||||||||||||||||||
Пример — Повышение коэффициента мощности с помощью конденсатора
Электродвигатель мощностью 150 кВт имеет коэффициент мощности до улучшения cosΦ = 0.75 .
Для требуемого коэффициента мощности после улучшения cosΦ = 0,96 — коэффициент коррекции конденсатора составляет 0,58 .
Требуемая мощность KVAR может быть рассчитана как
C = (150 кВт) 0,58
= 87 KVAR
Рекомендуемые характеристики конденсаторов для двигателей с Т-образной рамой NEMA класса B
Рекомендуемые размеры блоков KVAR, необходимых для коррекция асинхронных двигателей до коэффициента мощности примерно 95%.
| Номинальная мощность асинхронного двигателя (л.с.) | Номинальная скорость двигателя (об / мин) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3600 | 1800 | 1200 | ||||||||||||
| Номинальная мощность конденсатора 8 | Ток (%) | Номинальная мощность конденсатора (кВАр) | Снижение линейного тока (%) | Номинальная мощность конденсатора (кВАр) 910 %90 | 90 Снижение линейного тока 9107 91 ||||||||||
| 3 | 1.5 | 14 | 1,5 | 23 | 2,5 | 28 | ||||||||
| 5 | 2 | 14 | 2,5 | 22 | 3 | 26 | 2,5 | 3 | 20 | 4 | 21 | |||
| 10 | 4 | 14 | 4 | 18 | 5 | 21 | ||||||||
| 151228 | 18 | 6 | 20 | |||||||||||
| 20 | 6 | 12 | 6 | 17 | 7.5 | 19 | ||||||||
| 25 | 7,5 | 12 | 7,5 | 17 | 8 | 19 | ||||||||
| 30 | 8 | 11 | 8 | 11 | ||||||||||
| 40 | 12 | 12 | 13 | 15 | 16 | 19 | ||||||||
| 50 | 15 | 12 | 18 31 | 151228 | 151248 | 151228 60 | 18 | 12 | 21 | 14 | 22.5 | 17 | ||
| 75 | 20 | 12 | 23 | 14 | 25 | 15 | ||||||||
| 100 | 22,5 | 11 | 11 | 11 | ||||||||||
| 125 | 25 | 10 | 36 | 12 | 35 | 12 | ||||||||
| 150 | 30 | 10 | 42 | 200 | 35 | 10 | 50 | 11 | 50 | 10 | ||||
| 250 | 40 | 11 | 60 | 10 | 62.5 | 10 | ||||||||
| 300 | 45 | 11 | 68 | 10 | 75 | 12 | ||||||||
| 350 | 50 | 12 | ||||||||||||
| 400 | 75 | 10 | 80 | 8 | 100 | 12 | ||||||||
| 450 | 80 | 8 | 90 | 8 | 90 | 81248 500 | 100 | 8 | 120 | 9 | 150 | 12 | ||
Максимальные и минимальные значения напряжения электродвигателя
Экономические потери от преждевременного отказа электродвигателя ужасны.В большинстве случаев цена самого мотора тривиальна по сравнению со стоимостью внеплановых остановок процессов. Как высокое, так и низкое напряжение могут вызвать преждевременный отказ двигателя, равно как и дисбаланс напряжений. Здесь мы рассмотрим влияние низкого и высокого напряжения на двигатели и связанные с этим изменения производительности, которые вы можете ожидать при использовании напряжения, отличного от указанного на паспортной табличке.
Воздействие низкого напряжения. Когда вы подвергаете двигатель воздействию напряжения ниже номинального, указанного на паспортной табличке, некоторые характеристики двигателя изменятся незначительно, а другие резко изменятся.Чтобы приводить в действие фиксированную механическую нагрузку, подключенную к валу, двигатель должен потреблять фиксированное количество энергии от линии. Количество потребляемой двигателем мощности примерно соответствует току напряжения 2 (в амперах). Таким образом, когда напряжение становится низким, ток должен увеличиваться, чтобы обеспечить такое же количество энергии. Увеличение тока представляет опасность для двигателя только в том случае, если этот ток превышает номинальный ток двигателя, указанный на паспортной табличке. Когда ток превышает номинал, указанный на паспортной табличке, в двигателе начинает накапливаться тепло. Без своевременной коррекции это тепло приведет к повреждению двигателя.Чем больше тепла и чем дольше на него воздействуют, тем больше повреждение мотора.
Существующая нагрузка является основным фактором при определении того, насколько снижение напряжения питания может выдержать двигатель (см. Врезку ниже). Например, давайте посмотрим на двигатель с небольшой нагрузкой. Если напряжение уменьшается, ток увеличивается примерно в той же пропорции, что и напряжение. Например, снижение напряжения на 10% приведет к увеличению силы тока на 10%. Это не повредит двигатель, если ток будет ниже значения, указанного на паспортной табличке.
А что, если у этого двигателя большая нагрузка? В этом случае у вас уже есть большой ток, поэтому напряжение уже ниже, чем было бы без нагрузки. Возможно, вы даже приблизитесь к нижнему пределу напряжения, указанному на паспортной табличке. Когда происходит снижение напряжения, ток возрастает до нового значения, которое может превышать номинальный ток при полной нагрузке.
Низкое напряжение может привести к перегреву, сокращению срока службы, снижению пусковых возможностей и уменьшению момента подъема и отрыва. Пусковой крутящий момент, крутящий момент и крутящий момент отрыва асинхронных двигателей изменяются в зависимости от приложенного напряжения в квадрате.Таким образом, 10% -ное снижение напряжения, указанного на паспортной табличке (от 100% до 90%, от 230 В до 207 В), уменьшит пусковой крутящий момент, крутящий момент отжима и крутящий момент отрыва в 0,92,9 раза. Полученные значения составят 81% от значений полного напряжения. При напряжении 80% результат будет 0,82,8 или значение 64% от полного значения напряжения. Что это означает в реальной жизни? Что ж, теперь вы можете понять, почему трудно запустить «трудно запускаемые» нагрузки, если напряжение оказывается низким. Точно так же крутящий момент двигателя будет намного ниже, чем при нормальном напряжении.
Для малонагруженных двигателей с легко запускаемыми нагрузками снижение напряжения не будет иметь какого-либо заметного эффекта, за исключением того, что оно может помочь снизить потери при небольшой нагрузке и повысить эффективность в этих условиях. Это принцип, лежащий в основе некоторого дополнительного оборудования, предназначенного для повышения эффективности.
Воздействие высокого напряжения. Люди часто делают предположение, что, поскольку низкое напряжение увеличивает силу тока на двигателях, высокое напряжение должно уменьшать потребляемую силу тока и нагрев двигателя.Это не тот случай. Высокое напряжение на двигателе приводит к насыщению магнитной части двигателя. Это приводит к тому, что двигатель потребляет чрезмерный ток, пытаясь намагнитить утюг за пределы точки, в которой намагничивание является практичным.
Двигатели допускают некоторое изменение напряжения выше расчетного. Однако, если напряжение превышает расчетное, сила тока возрастет, что приведет к соответствующему увеличению нагрева и сокращению срока службы двигателя.
Например, производители ранее рассчитывали двигатели на 220/440 В с диапазоном допуска 510%.Таким образом, допустимый диапазон напряжения на высоковольтных соединениях составляет от 396 до 484 В. Несмотря на то, что это так называемый диапазон допуска, наилучшие характеристики будут достигнуты при номинальном напряжении. Крайние концы (высокие или низкие) создают ненужную нагрузку на двигатель.
Не попадайтесь в ловушку, думая, что с вами все в порядке, только потому, что ваше напряжение питания находится в этих пределах. Назначение этих диапазонов — приспособиться к обычным почасовым колебаниям напряжения на заводе. Постоянная работа на высоких или низких предельных значениях сокращает срок службы двигателя.
Такая чувствительность к напряжению характерна не только для двигателей. Фактически, колебания напряжения влияют на другие магнитные устройства аналогичным образом. Соленоиды и катушки, которые вы найдете в реле и пускателях, лучше переносят низкое напряжение, чем высокое. Это также верно для балластов в люминесцентных, ртутных и натриевых осветительных приборах высокого давления. И это касается трансформаторов всех типов. Лампы накаливания особенно чувствительны к высокому напряжению. Увеличение напряжения на 5% сокращает срок службы лампы на 50%.Повышение напряжения на 10% выше номинального сокращает срок службы лампы накаливания на 70%.
В целом, для оборудования определенно будет лучше, если вы измените ответвления на входных трансформаторах, чтобы оптимизировать напряжение в цехе завода до уровня, близкого к номинальным характеристикам оборудования. На старых установках вам, возможно, придется пойти на некоторые компромиссы из-за различий в стандартах для старых двигателей (220/440 В) и более новых стандартов «Т-образной рамы» (230/460 В). Напряжение посередине этих двух напряжений (что-то вроде 225 В или 450 В) обычно дает наилучшие общие характеристики.Высокое напряжение всегда приводит к снижению коэффициента мощности, что увеличивает потери в системе. Это приводит к более высоким эксплуатационным расходам на оборудование и систему.
Стандартный рисунок (найденный в документации по двигателям и в оригинальной печатной версии этой статьи) иллюстрирует общее влияние высокого и низкого напряжения на характеристики двигателей с Т-образной рамой. Этот график широко используется в различных справочных материалах. Но это всего лишь пример и не дает точной информации, которая применима ко всем двигателям.Вместо этого он представляет только один тип двигателя, с большим количеством вариаций от одного двигателя к другому. Например, самая низкая точка на линии усилителя полной нагрузки не всегда возникает при напряжении на 21/2% выше номинального. На некоторых двигателях это может произойти при напряжении ниже номинального. Кроме того, повышение тока полной нагрузки при напряжениях выше номинального имеет тенденцию быть более крутым для одних конструкций обмоток двигателя, чем для других. Боковая панель на странице 78 предлагает некоторые рекомендации по определению влияния колебаний напряжения на отдельные конструкции и корпуса двигателей.
Не подвергайте свои электродвигатели и другое электрическое оборудование нагрузке из-за того, что энергосистема работает на краях предельных значений напряжения или около них. Наилучший срок службы и наиболее эффективная работа обычно происходят, когда вы эксплуатируете двигатели при напряжениях, очень близких к номинальным значениям, указанным на паспортной табличке. Подавая напряжение на двигатели, держитесь подальше от «внешних пределов».
Этот текст является адаптацией «Документов Коверна», любезно предоставленных компанией Baldor Electric Co., Уоллингфорд, штат Коннектикут, отредактированной Марком Ламендолой, техническим редактором EC&M.Кауэрн — разработчик приложений Baldor.
Перемотка 3-фазного двигателя: 54 шага (с изображениями)
Введение: 3-фазный электродвигатель перемотки
Всем привет, я Нико, и в этой инструкции я покажу вам, как перематывать и обновлять старый трехфазный электродвигатель .
Если вы ищете перемотка однофазного двигателя , вы можете найти его здесь .
В этой статье я сделаю шаг вперед. В следующих шагах я покажу вам, как анализировать обмотку двигателя, разбирать двигатель, снимать подшипники, рассчитывать новую обмотку, перематывать двигатель, собирать его с новыми подшипниками и тестировать двигатель.Перемотка — очень долгий процесс. На его перемотку, замену всех старых деталей и сборку потребовалось около двух дней.
Если у вас есть какие-либо вопросы, вы можете легко написать мне.
Добавить TipAsk QuestionDownload
Шаг 1: Анализ двигателя
Я получил этот двигатель в моем университете.
Трехфазный асинхронный двигатель — самый распространенный двигатель в мире. Он имеет очень высокую эффективность и низкие затраты на производство и обслуживание. Две основные части двигателя — это ротор и статор. Ротор обычно выполнен в виде беличьей клетки и вставляется в отверстие статора.Статор выполнен из стального сердечника и обмотки.
Статор используется для создания магнитного поля. 3 фазы создают вращающееся магнитное поле, поэтому нам не нужен конденсатор на трехфазном двигателе. Магнитное поле вращения «режет» беличью клетку, где наводит напряжение. Поскольку клетка закорочена, напряжение генерирует электрический ток. Ток в магнитном поле создает силу.
Поскольку магнитное поле должно вращаться быстрее, чем ротор, чтобы вызвать напряжение в роторе. Поэтому скорость двигателя немного меньше скорости магнитного поля ((3000 об / мин [Магнитное поле] — 2810 об / мин [Электродвигатель])).Вот почему мы называем их Трехфазным АСИНХРОННЫМ электродвигателем .
Добавить TipAsk QuestionDownload
Шаг 2: Анализ двигателя
Motors Табло с надписью
На табличке с надписью двигателей мы можем найти наиболее полезную информацию о двигателе:
- Номинальное напряжение двигателя (для звезды (Y) и треугольник ( D) подключение двигателя) [В]
- Номинальный ток двигателя (для звезды (Y) и треугольника (D) подключение двигателя) [A]
- Мощность электродвигателя [Вт]
- Коэффициент мощности cos Fi
- Скорость вращения [об / мин]
- Номинальная частота [Гц]
Добавить TipAsk QuestionDownload
Шаг 3: Анализ обмотки
Откройте крышку распределительной коробки.
Перед измерением удалите все соединения в распределительной коробке. Измерьте сопротивление каждой обмотки, сопротивление между двумя разными обмотками и сопротивление между обмоткой и корпусом двигателя.
Сопротивления трех обмоток должны быть одинаковыми (+/- 5%). Сопротивление между двумя обмотками и рамой обмотки должно быть более 1,5 МОм.
Обгоревшие обмотки двигателей можно определить по уникальному запаху (запах горелого лака).
Добавить TipAsk QuestionDownload
Шаг 4: Разборка двигателя
Сделайте несколько снимков двигателя.Отметьте места между первой крышкой и статором и вторым корпусом и статором (нам понадобятся эти отмеченные точки при сборке двигателей).
Снимите крышки с двигателя. Обычно они крепятся к статору длинными винтами. Если не удается разделить крышку и статор, можно использовать резиновый молоток. Осторожно ударьте по крышке и попробуйте повернуть ее. Если это не сработает, нагрейте его.
Добавить TipAsk QuestionDownload
Шаг 5: Разборка двигателя
Снимите ротор со статора. Вы можете аккуратно ударить по оси роторов резиновым молотком.
Добавить TipAsk QuestionDownload
Шаг 6: Разборка двигателя
Снимите вентилятор с оси роторов. У меня был металлический вентилятор, поэтому я его нагрел. Я очень легко отделил его от оси.
Снимите зажим и предохранительное кольцо, если оно у вас есть. Затем снимите вторую крышку.
Добавить TipAsk QuestionDownload
Шаг 7: Снятие подшипников
Используйте съемник для снятия подшипников с обеих сторон. Будьте осторожны, так как вы легко можете повредить ось ротора.
Добавить TipAsk QuestionDownload
Шаг 8: Удаление старой обмотки
Сначала вам нужно отрезать старую обмотку статора. Для этой работы используйте молоток и зубила. Старайтесь не повредить ламели статоров.
Проделайте то же самое с обеих сторон статора.
Добавить TipAsk QuestionDownload
Шаг 9: Удаление старой обмотки
Снимите соединения и распределительную коробку со статора. На следующем этапе вам нужно будет нагреть старые змеевики, при этом распределительный короб должен быть пустым.
Добавить TipAsk QuestionDownload
Шаг 10: Удаление старой обмотки
Нагрейте обмотку пламенной горелкой, чтобы сжечь остатки лака.
Если вы прожгли старый лак, вы сможете вытолкнуть оставшуюся обмотку из зазоров статоров.
Добавить TipAsk QuestionDownload
Шаг 11: Пескоструйная обработка
Пескоструйная обработка — это процесс, при котором песок ударяется по поверхности заготовки с очень высокой скоростью и слегка повреждает ее.
Вы можете легко удалить двигатель старой окраски с помощью пескоструйной обработки. При пескоструйной очистке нужно быть осторожным, чтобы не повредить слишком сильно поверхность, особенно края колпаков.
Добавить TipAsk QuestionDownload
Шаг 12: Покраска двигателя
Цвет должен выдерживать не менее 100 градусов Цельсия.Убедитесь, что вы не раскрашиваете доску для надписей.
Добавить TipAsk QuestionDownload
Шаг 13: Идентификация старой обмотки
Вы можете найти всю информацию о типе старой обмотки в «намоточной головке». Обмоточная головка — это часть обмотки, в которой выполняются все соединения.
По головке намотки (типу намотки), количеству проводов в каждом зазоре и толщине провода вы можете перемотать обмотку нового двигателя без выполнения расчетов на следующем шаге.
Добавить TipAsk QuestionDownload
Шаг 14: Расчет параметров новой обмотки
Новая обмотка двигателя зависит от пакета статоров (размеров стального сердечника).Для лучшего представления я сделал 3D модель своего статора.
Необходимо измерить:
- Длина пакета статоров: lp = 87мм;
- Внешний диаметр пакета statros: Dv = 128мм;
- Внутренний диаметр корпуса статоров: D = 75,5 мм;
- Количество зазоров статоров: Z = 24;
Добавить TipAsk QuestionDownload
Шаг 15: Расчет параметров для новой обмотки
Теперь измерьте размеры паза статора.
- Ширина паза статора: b1 = 6,621 мм; b2 = 8,5мм;
- Высота паза статора: hu = 13,267 мм;
- Открытие паза статора: b0 = 2мм;
- Высота паза «горловина»: a1 = 0,641 мм;
- Ширина зуба: bz = 3,981 мм;
Добавить TipAsk QuestionDownload
Шаг 16: Расчет параметров для новой обмотки
Если у вас прорезь другой формы, посмотрите на верхний рисунок.
Я скопировал эту картинку из книги [Neven Srb; Электромотори].
Добавить TipAsk QuestionDownload
Шаг 17: Расчет количества пар полюсов
Количество пар полюсов зависит от номинальных частот и скорости вращения магнитного поля. Вы можете получить скорость вращения магнитного поля, округлив скорость двигателя (2810) до ближайшего значения (3000, 1500, 1000, 750 …).
Добавить TipAsk QuestionDownload
Шаг 18: Расчет количества пар полюсов
Я подсчитал, что у моего двигателя 2 пары полюсов, и он генерирует магнитное поле, как вы можете видеть на верхнем рисунке.
Добавить TipAsk QuestionDownload
Шаг 19: Рассчитать шаг полюса
Шаг полюса — это расстояние по внутреннему кругу статора, и он отмечает размер каждого полюса.
Добавить TipAsk QuestionDownload
Шаг 20: Расчет поверхности полюса
Поверхность полюса отмечена красным на рисунке 2. Одна полюсная поверхность — это ровно половина поверхности статора, потому что у меня двухполюсный двигатель.
Добавить TipAsk QuestionDownload
Шаг 21: Расчет поверхности полюса
Поскольку железный сердечник статора не сделан из чистого железа, нам необходимо рассчитать реальную длину корпуса.Коэффициент наполнения железом указан в верхней таблице. Это зависит от типа изоляции.
Добавить TipAsk QuestionDownload
Шаг 22: Расчет длины зуба
Добавить TipAsk QuestionDownload
Шаг 23: Расчет высоты ярма статора
Ярмо статора является частью пакета статоров, который простирается от зуба статора до конец пакета.
Добавить TipAsk QuestionDownload
Шаг 24: Расчет поперечного сечения ярма
Добавить TipAsk QuestionDownload
Шаг 25: Расчет поперечного сечения зубьев одного полюса
Добавить TipAsk QuestionDownload
Шаг 26: Расчет прорези Поверхность
Добавить TipAsk QuestionDownload
Шаг 27: Выбор типа обмотки
Я выбрал тип обмотки на основе технических характеристик двигателя.В намоточных книгах очень много разных типов схем намотки. Каждый утоплен для разного количества пар полюсов.
Обмотку по картинке взял из книжки. Моя новая обмотка была трехфазной однослойной концентрической обмоткой.
Добавить TipAsk QuestionDownload
Шаг 28: Расчет количества слотов на полюс и фазу
Добавить TipAsk QuestionDownload
Шаг 29: Расчет шага полюса (в слотах)
Добавить TipAsk QuestionDownload
Шаг 30: Фактор намотки
На верхнем рисунке есть таблица.Вы не можете подобрать коэффициент намотки из таблицы, если у вас однослойная намотка.
Добавить TipAsk QuestionDownload
Шаг 31: Индукция в воздушном зазоре
Выберите соответствующее значение индукции в воздушном зазоре из таблицы. Это зависит от количества пар полюсов. Если двигатель старше, выберите столбец I , в противном случае выберите значение из столбца II .
Добавить TipAsk QuestionDownload
Шаг 32: Расчет индукции в зубцах статора
Добавить TipAsk QuestionDownload
Шаг 33: Расчет индукции в ярме статора
Добавить TipAsk QuestionDownload
Шаг 34: Расчет индукции Магнитный поток одной пары полюсов
Добавить TipAsk QuestionDownload
Шаг 35: Расчет расчетного количества витков в фазе
Добавить TipAsk QuestionDownload
Шаг 36: Расчет расчетного количества витков в слоте
Добавить TipAsk ВопросСкачать
Шаг 37: Определите коэффициент заполнения
Чтобы получить правильный коэффициент заполнения, вам необходимо иметь поверхность вашего гнезда.Тогда вы легко запишите коэффициент заполнения с верхнего графика. Коэффициент заполнения должен находиться между верхней и нижней рекомендованной линией.
Добавить TipAsk QuestionDownload
Шаг 38: Расчет поперечного сечения провода
Добавить TipAsk QuestionDownload
Шаг 39: Расчет толщины проволоки
В соответствии с результатом вы выбираете провод, который находится в +/- 2% диапазон результата. Выбрал провод 0,8мм.
Добавить TipAsk QuestionDownload
Шаг 40: Схема обмотки
Я переделал схему обмотки из книги, чтобы она соответствовала моему статору.Я рисую новую схему обмотки, которую использовал для намотки двигателя.
На втором рисунке показано магнитное поле, создаваемое обмоткой статора. O и X показывают направление электрического тока. Ток, протекающий внутри изображения, имеет направление магнитного поля по часовой стрелке. Если бы был 4-полюсный двигатель, у нас было бы 4 области вместо 2 областей магнитного поля.
Добавить TipAsk QuestionDownload
Шаг 41: Изоляция пазов статора
Измерьте длину паза и добавьте около 16 мм (в зависимости от того, как вы будете скручивать бумагу).Вырежьте и скрутите, как я делал на гифках. Положите изолирующую бумагу на стол и поместите на нее линейку так, чтобы у вас получился зазор около 4 мм, когда вы вставляете изолирующую бумагу, а затем скручиваете ее. С помощью отвертки согните его и вставьте в щель. Он должен идеально подходить, чтобы вы не могли его вытащить.
Добавить TipAsk QuestionDownload
Шаг 42: Измерьте длину катушек
Сделайте модель катушки. Поместите модель в правые гнезда, оставив немного свободного места. Вы не должны оставлять слишком много места, потому что обмотка будет слишком узкой, и вы не должны делать ее слишком маленькой, потому что вы не сможете получить доступ ко всем слотам.
Добавить TipAsk QuestionDownload
Шаг 43: Намотка катушек
Поместите модель в специальный инструмент. Бесплатная 3д модель намоточного инструмента доступна в инструкции «Перемотка однофазного двигателя». Убедитесь, что вы наматываете правильное количество оборотов. После того, как вы намотаете катушку, ее нужно перевязать куском проволоки. Затем вы можете взять его из намоточного инструмента.
Добавить TipAsk QuestionDownload
Шаг 44: Установка катушек в пазы статоров
Осторожно поместите катушки в пазы статоров.Это может занять много времени. Будьте осторожны, чтобы не повредить лак для проводов. Поверните катушки так, чтобы их концевые провода выходили сбоку, где находится отверстие от статора к электрическим зажимам. Вы можете использовать деревянную палку, чтобы вставить обмотку в пазы.
Пометьте концы катушек!
Добавить TipAsk QuestionDownload
Шаг 45: Соединение катушек
Соедините катушки вместе согласно схеме намотки. Спаяйте и изолируйте их. Конец каждого провода катушки к распределительной коробке и дополнительно изолируйте их.
Добавить TipAsk QuestionDownload
Шаг 46: Свяжите катушки
Свяжите катушки с помощью нити шнуровки статора. Пришейте нитку для проточки статора вокруг катушек, как вы можете видеть на картинках. Плотная намотка хорошо.
Добавить TipAsk QuestionDownload
Шаг 47: Покрытие двигателя лаком
1. Нагрейте духовку до 100 ° C. Поставил в него мотор.
2. Когда двигатель нагревается, на обмотки двигателя проливается лак, как вы видите на рисунках
3. Переверните двигатель и сделайте то же самое
4.Вы можете повторно использовать старый лак.
5. Поместите мотор в горячую духовку и варите около 4 часов.
6. Выньте мотор и очистите край (чтобы крышка подходила идеально).
НЕ ДЕЛАЙТЕ ЭТО ВНУТРИ ЗДАНИЯ ИЛИ КУХНИ!
Добавить TipAsk QuestionDownload
Шаг 48: Соберите двигатель
Установите новые подшипники. Смажьте ось ротора. Вы найдете тип подшипника на стороне подшипника. Если вы не можете найти его, вы можете измерить его и найти номер в каталоге в Интернете.
Добавить TipAsk QuestionDownload
Шаг 49: Соберите двигатель
Установите крышку на статор. Следите за отметками, чтобы поставить его в нужное место.
Добавить TipAsk QuestionDownload
Шаг 50: Соберите двигатель
Вставьте ротор в статор и закройте его второй крышкой. Прикрутите мотор вместе.
Добавить TipAsk QuestionDownload
Шаг 51: Соберите двигатель
Подсоедините концы катушек к зажимам, как показано на изображении из анализируемого двигателя.
Добавить TipAsk QuestionDownload
Шаг 52: Соберите двигатель
Установите вентилятор и последнюю крышку на двигатель.Если у вас есть железный вентилятор, нагрейте его.
Добавить TipAsk QuestionDownload
Шаг 53: Измерение
Я отвез отремонтированный двигатель в университет для проведения измерений. Мы установили двигатель на специальное испытательное устройство и соединили его с измерительным оборудованием. Мы проверили следующее:
- Сопротивление обмотки
- Испытание электродвигателя в свободном режиме
- Испытание нагруженного электродвигателя
- Испытание оптимального напряжения
- Испытание на короткое замыкание
- Характеристика крутящего момента
* PF = Мощность фактор
Добавить TipAsk QuestionDownload
Шаг 54: Заключение
Перемотка этого мотора заняла у меня около недели.Больше всего времени я потратил на расчет новой обмотки. У меня было много проблем с расчетом, но я их решил и получил те же параметры намотки, что и на старом.
У меня тоже было много проблем с намоткой новой обмотки. Сначала я сделал катушки слишком маленькими, и я не мог вставить последние катушки в пазы. Я не мог получить к ним доступ, потому что другие обмотки были слишком маленькими. Затем я решил увеличить размер, но снова обнаружил проблему. На этот раз обмотка была слишком большой, и я не мог закрыть крышку мотора.
Третий раз удачный двигатель перемотки.Поскольку зазор между статором и крышкой был очень маленьким, я решил сделать первые катушки побольше и последние катушки немного поменьше. Вы можете увидеть это при измерении сопротивления, когда сопротивления обмоток не идентичны. Но в следующем измерении мы увидим, что сопротивления не сильно влияют на работу электродвигателей.
Все тесты я провел с двумя разными напряжениями. Мотор был рассчитан на напряжение 380В, но сейчас у нас в ЕС 400В.
В верхней таблице в первой строке указаны данные производителя.Во второй строке — измерения при 380 В, а в третьей строке — при 400 В. Если мы сравним все данные, то увидим, что мотор совсем неплох. Все параметры очень близки друг к другу.
Я взял все электрические уравнения и таблицы ориентации из книги: Neven Srb ELEKTROMOTORI
Надеюсь, вам понравилась моя презентация перемотки трехфазного двигателя. Если у вас есть вопросы, задавайте, и я постараюсь ответить как можно скорее. Спасибо за Ваше внимание.
С уважением Niko
Добавить TipAsk QuestionDownload
Будьте первым, кто поделится
Вы сделали этот проект? Поделитесь с нами!
Я сделал это! РекомендацииДвигатель 60 Гц, работающий от источника питания 50 Гц или наоборот.
Электродвигатели, как однофазные, так и трехфазные, предназначены для работы на определенной частоте сети.Но иногда мы можем использовать «неправильный» двигатель в блоке питания.Базовая частота вращения об / мин прямо пропорциональна частоте вращения Гц. Если вы уменьшите частоту источника питания, двигатель замедлится. Напротив, если вы увеличите частоту, двигатель ускорится. Изменение частоты вращения пропорционально изменению частоты вращения.
Двигатель 60 Гц будет работать на 20% медленнее при питании от источника питания 50 Гц
Это также приводит к снижению мощности на 20%. По сути, более медленная работа электрической машины обычно означает, что она потребует меньше энергии.Это хорошо, поскольку мощность двигателя также снижается на 20%, а вентилятор охлаждения тоже замедляется. Но решающим фактором здесь является соотношение В / Гц. Подорожает на 20%! Нехорошо. Это означает, что во время части каждого цикла линии электропередачи магнитная структура двигателя, вероятно, будет перегружена.
Единственный выход здесь — скорректировать В / Гц с помощью легко изменяемого значения переменной — V напряжения. Понизьте напряжение с помощью трансформатора, чтобы скорректировать соотношение В / Гц.
Двигатель 50 Гц будет работать на 20% быстрее от источника питания 60 Гц
Киловатт двигателя переменного тока пропорционален крутящему моменту, умноженному на обороты.Поскольку крутящий момент двигателя не будет существенно меняться с увеличением частоты, теперь он будет выдавать на 20% больше мощности. Двигатель мощностью 10 кВт 50 Гц будет двигателем мощностью 12 кВт с источником питания 60 Гц.
Работа машины на 20% быстрее, скорее всего, увеличит ее энергопотребление как минимум на 20%! Если во время работы машина циклически ускоряется или замедляется, на нее будут действовать большие механические силы. Если двигатель приводит в движение центробежные нагрузки, их потребность может даже возрасти в квадрате увеличения скорости.
Случай 1: у вас есть мощность 60 Гц для оборудования 50 Гц
Допустим, вы только что приобрели хорошее оборудование. Когда он был подключен, вы поняли, что на его паспортной табличке указано 50 Гц, а у вас есть источник питания 60 Гц.
Оборудование будет работать на 20% быстрее! Это будет проблемой? Если это так, можно ли вернуть скорость к расчетной, изменив размер шкива, чтобы снизить скорость на 20% до прежнего значения?
После того, как эта оценка будет проведена и будут заменены шкивы или сделаны другие модификации, чтобы помочь уменьшить проблемы со скоростью / мощностью, переходите к следующему шагу.Прочтите паспортную табличку, чтобы узнать силу тока полной нагрузки, обычно известную как номинальное значение FLA для двигателя при том напряжении, с которым он будет работать.
Используя токоизмерительные клещи, запустите машину и убедитесь, что сила тока ниже FLA. Если это так, вы можете продолжить работу с оборудованием по своему усмотрению. Убедитесь, что он все еще находится под FLA при полной загрузке. Если это через FLA, вы должны сделать какое-то смягчение нагрузки.
Случай 2. У вас есть мощность 50 Гц для устройства 60 Гц
Вы получаете прибор, и поскольку вы используете источник питания с частотой 50 Гц, этикетка с частотой 60 Гц вас беспокоит.Как и должно быть!
Опять же, учитывая, что устройство будет работать на 20% медленнее, выполнит ли оно свою работу? В этом случае вы не можете изменить размер шкива, чтобы скорректировать скорость, потому что двигатель только что потерял 20% мощности, указанной на паспортной табличке. Если вы замените шкивы, они, скорее всего, будут серьезно перегружены.
Если устройство может работать на 20% медленнее, есть надежда. Несмотря на то, что он потеряет охлаждение из-за того, что его внутренний вентилятор будет работать медленнее, работа нагрузки будет медленнее и с двигателем, который будет на 20% менее мощным, скорее всего, выровняется.Увеличение В / Гц все еще может вас достать.
На этом этапе, если ваша оценка показывает, что вы, вероятно, будете в порядке с меньшей скоростью, еще раз проверьте паспортную табличку для FLA. Запустите прибор и быстро проверьте рабочий ток с помощью амперметра. Если он ниже FLA, продолжайте загружать устройство, внимательно наблюдая за происходящим. Если вы останетесь ниже FLA, вероятно, все будет в порядке.
Но! Запуск на FLA сейчас, когда охлаждающий вентилятор снизил производительность, все еще, возможно, будет проблемой.Вам следует следить за температурой двигателя и убедиться, что после продолжительного времени работы под нагрузкой она остается ниже значения, указанного на паспортной табличке.
