Как работают радиочастотные преобразователи постоянного тока. Каковы их преимущества перед традиционными преобразователями. Какие проблемы необходимо решить для широкого внедрения этой технологии. Какие перспективы открываются перед радиочастотными преобразователями в будущем.
Принцип работы радиочастотных DC-DC преобразователей
Радиочастотные преобразователи постоянного тока в постоянный (RF DC-DC converters) используют высокочастотные колебания для преобразования напряжения. В отличие от традиционных импульсных преобразователей, работающих на частотах до нескольких сотен кГц, RF-преобразователи оперируют в диапазоне от единиц до сотен МГц.
Основные компоненты RF DC-DC преобразователя:
- Генератор ВЧ-колебаний (обычно на полевых транзисторах)
- Резонансный LC-контур
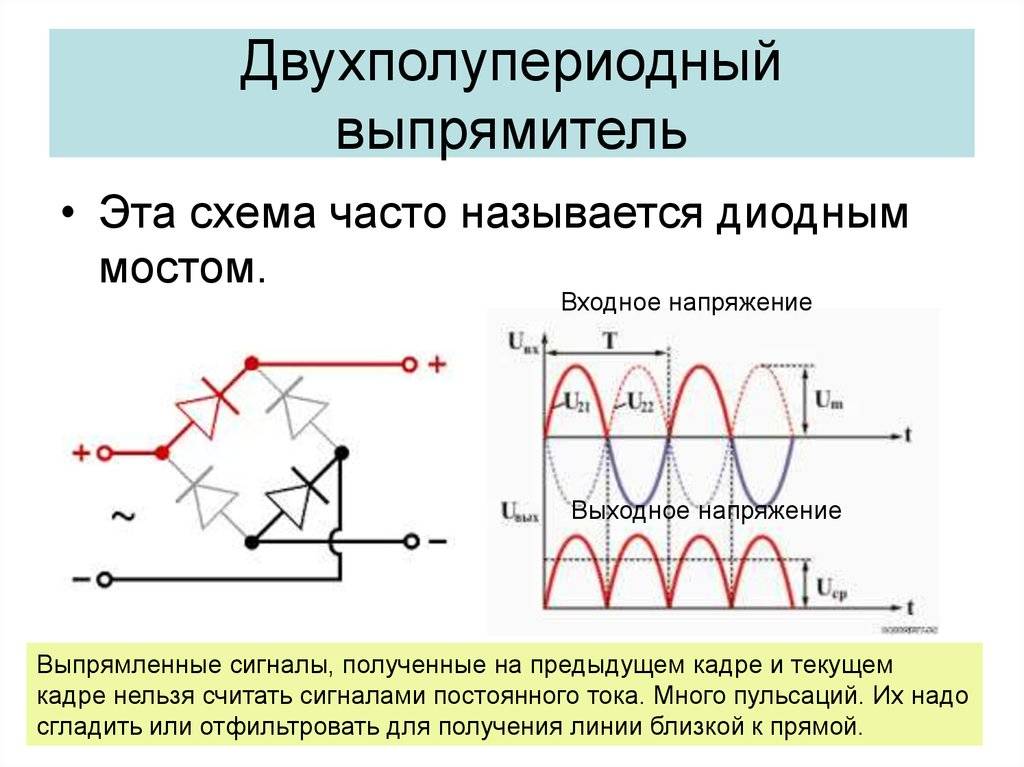
- Выпрямитель
- Фильтр выходного напряжения
Принцип работы заключается в следующем: входное постоянное напряжение преобразуется в высокочастотные колебания, которые затем выпрямляются и фильтруются для получения требуемого выходного напряжения. За счет высокой рабочей частоты удается значительно уменьшить габариты пассивных компонентов.
Преимущества RF DC-DC преобразователей
Радиочастотные преобразователи обладают рядом важных преимуществ по сравнению с традиционными импульсными DC-DC преобразователями:
- Меньшие габариты и вес за счет использования компонентов меньшего размера
- Более высокий КПД, особенно при малых нагрузках
- Улучшенные динамические характеристики
- Меньший уровень электромагнитных помех
- Возможность интеграции в одном чипе
Благодаря этим преимуществам RF-преобразователи находят применение в портативной электронике, аэрокосмической технике, телекоммуникационном оборудовании и других областях, где критичны массогабаритные показатели и эффективность.
Проблемы и ограничения технологии
Несмотря на перспективность, RF DC-DC преобразователи пока не получили широкого распространения из-за ряда нерешенных проблем:
- Сложность проектирования высокочастотных схем
- Высокая стоимость компонентов
- Ограниченный выбор подходящих магнитных материалов
- Сложность отвода тепла в компактных конструкциях
- Необходимость экранирования от ВЧ-излучения
Для преодоления этих ограничений требуются дальнейшие исследования в области материалов, схемотехники и конструирования RF-преобразователей.
Перспективные направления развития
Основные направления совершенствования радиочастотных DC-DC преобразователей:
- Повышение рабочей частоты до единиц ГГц
- Разработка специализированных интегральных схем
- Применение новых магнитных и диэлектрических материалов
- Использование многофазных топологий
- Внедрение цифровых методов управления
Развитие этих направлений позволит создать сверхкомпактные и эффективные преобразователи для перспективных электронных устройств.
Применение RF DC-DC преобразователей в портативной электронике
Одной из наиболее перспективных областей применения радиочастотных преобразователей является портативная потребительская электроника — смартфоны, планшеты, ноутбуки. Использование RF-преобразователей позволяет:
- Уменьшить толщину устройств за счет более тонких компонентов
- Увеличить время автономной работы благодаря высокому КПД
- Снизить нагрев устройства при работе
- Уменьшить электромагнитные помехи
Ведущие производители мобильных устройств уже ведут разработки в этом направлении. Ожидается, что в ближайшие 3-5 лет на рынке появятся смартфоны с интегрированными RF DC-DC преобразователями.
Использование RF-преобразователей в системах электропитания космических аппаратов
Еще одна перспективная область применения радиочастотных преобразователей — системы электропитания космических аппаратов. Преимущества RF DC-DC преобразователей для космической техники:
- Малый вес, что критично для вывода на орбиту
- Высокая удельная мощность
- Устойчивость к радиационным воздействиям
- Возможность работы в широком диапазоне температур
Ведущие космические агентства и компании уже ведут разработки и испытания RF-преобразователей для применения в перспективных космических аппаратах. Ожидается, что в ближайшие 5-10 лет такие преобразователи станут стандартом для систем электропитания спутников и межпланетных зондов.
Проблемы электромагнитной совместимости RF-преобразователей
Одним из важных вопросов при разработке и применении радиочастотных DC-DC преобразователей является обеспечение их электромагнитной совместимости (ЭМС) с другими электронными устройствами. Основные проблемы ЭМС, связанные с RF-преобразователями:

- Излучение электромагнитных помех на рабочей частоте и ее гармониках
- Наводки высокочастотных сигналов на входные и выходные цепи
- Чувствительность к внешним электромагнитным полям
Для решения этих проблем применяются следующие методы:
- Тщательное экранирование высокочастотных цепей
- Использование многослойных печатных плат со специальной топологией
- Применение фильтров на входе и выходе преобразователя
- Оптимизация схемы для минимизации паразитных излучений
Правильное применение этих методов позволяет создавать RF-преобразователи, удовлетворяющие современным требованиям по ЭМС для различных областей применения.
Интеграция RF DC-DC преобразователей в микросхемы
Одним из перспективных направлений развития радиочастотных преобразователей является их интеграция непосредственно в микросхемы вместе с другими функциональными блоками. Это позволяет создавать так называемые системы-на-кристалле (System-on-Chip, SoC) с интегрированным высокоэффективным источником питания.
Преимущества такого подхода:
- Минимальные габариты системы питания
- Снижение паразитных параметров соединений
- Улучшение тепловых характеристик
- Возможность точной подстройки параметров питания под нагрузку
- Снижение общей стоимости системы
Однако интеграция RF-преобразователей в микросхемы связана с рядом технологических трудностей, в частности:
- Необходимость создания высокодобротных интегральных индуктивностей
- Проблема отвода тепла от силовых ключей
- Обеспечение электромагнитной совместимости с другими блоками микросхемы
Тем не менее, ведущие производители полупроводников активно работают над преодолением этих трудностей. Ожидается, что в ближайшие годы на рынке появятся первые коммерческие микросхемы со встроенными RF DC-DC преобразователями.
Частотный преобразователь и современные схемы его подключения
Частотный преобразователь и современные схемы его подключенияПреобразователи частотыМонтаж и пусконаладка Частотный преобразователь и современные схемы его подключения
ТеорияПрактика |
 Напряжение Т1 на выходе составляет от 400 до 660В, которое подается на низковольтный ЧП. На следующем этапе повышается напряжение переменной частоты до начального значения в 6кВ, эту роль на себя берет трансформатор Т2.
Данный способ, представляющий собой двойную трансформацию, считается одним из самых простых и достаточно дешевых методов по преобразованию частоты, так как он дает возможность использования в конструкции недорогого низковольтного ЧП. Высоковольтные аналоги отличаются более высокой ценой. При детальном рассмотрении становится ясно, что конечная цена этого устройства становится несколько дороже, и это обуславливается несколькими причинами. Во-первых, пиковые перенапряжения с амплитудой 1 – 1,5Кв и частотой следования 5 – 20кГц появятся на выходном напряжении из частотного преобразователя. Чтобы исключить пробои, необходимо установить синусоидальный трехфазный фильтр, а это, на самом деле, довольно сложное и очень дорогое устройство. Высокие токи подразумевают кабели большого сечения, что в значительной мере увеличивает габариты и массу устройства.
Напряжение Т1 на выходе составляет от 400 до 660В, которое подается на низковольтный ЧП. На следующем этапе повышается напряжение переменной частоты до начального значения в 6кВ, эту роль на себя берет трансформатор Т2.
Данный способ, представляющий собой двойную трансформацию, считается одним из самых простых и достаточно дешевых методов по преобразованию частоты, так как он дает возможность использования в конструкции недорогого низковольтного ЧП. Высоковольтные аналоги отличаются более высокой ценой. При детальном рассмотрении становится ясно, что конечная цена этого устройства становится несколько дороже, и это обуславливается несколькими причинами. Во-первых, пиковые перенапряжения с амплитудой 1 – 1,5Кв и частотой следования 5 – 20кГц появятся на выходном напряжении из частотного преобразователя. Чтобы исключить пробои, необходимо установить синусоидальный трехфазный фильтр, а это, на самом деле, довольно сложное и очень дорогое устройство. Высокие токи подразумевают кабели большого сечения, что в значительной мере увеличивает габариты и массу устройства.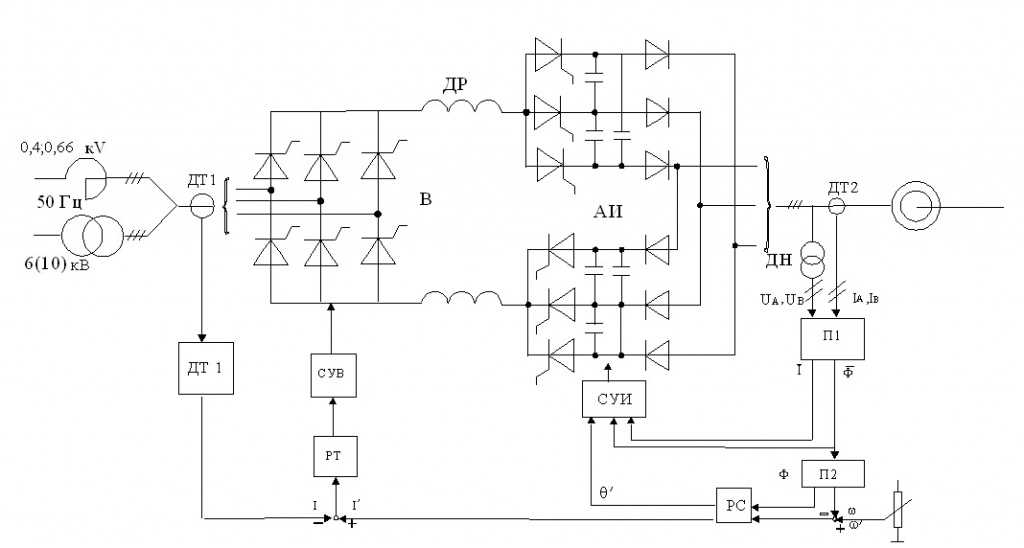
 Можно сделать вывод, что к основным недостаткам двухтрансформаторной системы относится плохой КПД, ненадежность устройства в целом и узкий диапазон регулирования 1:2. Мощность подобных устройств ограничивается мощностью низковольтного преобразователя и составляет от 500 до 1000 кВт.
Можно сделать вывод, что к основным недостаткам двухтрансформаторной системы относится плохой КПД, ненадежность устройства в целом и узкий диапазон регулирования 1:2. Мощность подобных устройств ограничивается мощностью низковольтного преобразователя и составляет от 500 до 1000 кВт.
Централизованная или локальная установка преобразователей частоты. Какой вариант лучше?
Содержание:
- Какие варианты установки частотников используют на современных производствах?
- Особенности централизованного управления
- Особенности децентрализованной установки частотных преобразователей
- Сегментация управления электродвигателями на объекте
Когда речь идет об установке одного или нескольких частотных преобразователей в промышленных или бытовых условиях, вопрос о месте монтажа частотника обычно не возникает и его ставят там, где удобно. Когда же речь идет о модернизации производства, на котором используются десятки и даже сотни электродвигателей, управление которых переводят на систему, использующую частотный преобразователь, возникает необходимость в выборе общего решения, позволяющего построить единую, ремонтопригодную и простую в обслуживании в систему управления.
Когда же речь идет о модернизации производства, на котором используются десятки и даже сотни электродвигателей, управление которых переводят на систему, использующую частотный преобразователь, возникает необходимость в выборе общего решения, позволяющего построить единую, ремонтопригодную и простую в обслуживании в систему управления.
Поскольку такое оборудование используется уже достаточно давно, есть ряд наработок, каждая из которых отличается своими достоинствами и недостатками и может применяться в промышленности.
Наиболее часто среди промышленных решений, когда требуется организовать независимое управление десятками электромоторов, используются такие варианты:
- централизованное управление. Предполагает установку единого шкафа с управляющим оборудованием, то есть с частотными преобразователями, откуда разводятся кабели питания на каждый электродвигатель;
- децентрализованное управление.
 В этой модели установка частотника на двигатель производится либо непосредственно на электромотор, либо в шкаф управления станком, либо в отдельный бокс или даже просто на стену в непосредственной близости от мотора;
В этой модели установка частотника на двигатель производится либо непосредственно на электромотор, либо в шкаф управления станком, либо в отдельный бокс или даже просто на стену в непосредственной близости от мотора; - сегментированное управление. Предполагает локальную централизацию, когда несколько электромоторов, находящихся в непосредственной близости друг от друга, подключают к одному шкафу централизованного управления. При этом таких шкафов на объекте может быть несколько.
Каждый из этих вариантов подключения асинхронных электродвигателей одно и трехфазного тока имеет свои особенности, преимущества и недостатки, которые следует рассмотреть отдельно.
Особенности централизованного управления
Такая схема предполагает установку одного коммутационного шкафа, к которому подводится питающее напряжение электросети, размещаются частотные преобразователи, выходные кабеля с которых прокладываются к месту установки электромоторов. К достоинствам такого решения можно отнести:
К достоинствам такого решения можно отнести:
- упрощение работ по наладке частотных преобразователей;
- более простое решение задачи поддержания оптимального температурного режима путем установки систем вентиляции и кондиционирования общего шкафа;
- минимизация протяженности сетей мониторинга и контроля.
У такого решение есть также ряд существенных недостатков, среди которых:
- значительное удаление электромотора от управляющего им частотного преобразователя приводит к росту потерь энергии в кабеле;
- возможно превышение длины кабеля от шкафа к электромотору свыше значения, установленного производителем частотника;
- рост уровня электромагнитных помех на объекте, который неизбежно связан с гармоническими колебаниями, образующимися в цепях силового питания электродвигателей после преобразователя частоты.
Поэтому такие решения используют, как правило, для управления относительно маломощными электромоторами, которые расположены на незначительном удалении от централизованного управляющего шкафа. При этом место для установки шкафа выбирается с точки зрения минимизации общей длины шлейфов подключения к электродвигателям, если, конечно, это допускает планировка объекта.
При этом место для установки шкафа выбирается с точки зрения минимизации общей длины шлейфов подключения к электродвигателям, если, конечно, это допускает планировка объекта.
Особенности децентрализованной установки частотных преобразователей
Такая схема предполагает установку частотника непосредственно на электромотор, в рядом расположенный коммутационный шкаф или в само оборудование, например, в станок, если это позволяет его конструкция.
Преимущества такой схемы очевидны, особенно если выполняется переоборудование производства и к местам подключения электромоторов уже разведено питающее напряжение. В этом случае:
- минимизируется длина дорогостоящего кабеля для подключения электромотора к частотнику;
- снижается уровень помех в сети предприятия;
- проще обнаружить и диагностировать поломку.
Недостатки у такого решения тоже можно найти, особенно если требуется обеспечить централизованное управление парком электродвигателей. В этом случае потребуется понести затраты на прокладку отдельных линий передачи данных к каждому частотнику.
В этом случае потребуется понести затраты на прокладку отдельных линий передачи данных к каждому частотнику.
Также потребуется отдельно решать задачи обеспечения температурного режима, защиты от пыли и влаги каждого частотного преобразователя по отдельности.
Поэтому часто для решения задачи комплексного внедрения частотников на крупных объектах применяют комбинированный вариант, который предполагает сегментацию централизованного и локального управления.
Сегментация управления электродвигателями на объекте
Технология предполагает группировку нескольких преобразователей частоты в коммутационном шкафу, при этом управляемые ими электромоторы находятся на незначительном расстоянии, не превышающем рекомендации производителя. Например, вариантом такой установки можно рассматривать монтаж одного такого шкафа по центру производственного цеха, в котором используется электромоторы.
Какая схема сегментации также предполагает возможность установки частотного преобразователя непосредственно на мотор, при этом критерием для такого решения может стать, например, высокая мощность электродвигателя, повышенные требования к точности системы обратной связи или другие конструктивные ограничения. Например, электромотор может быть установлен на значительном удалении от предполагаемого места размещения коммутационных шкафов и в этом случае дешевле и разумнее установить преобразователь непосредственно на него.
Например, электромотор может быть установлен на значительном удалении от предполагаемого места размещения коммутационных шкафов и в этом случае дешевле и разумнее установить преобразователь непосредственно на него.
Кроме того, сегментация системы управления электромоторами позволяет выполнять раздельное обслуживание и ремонт таких шкафов, что не приводит к полной остановке производства.
Если вам необходимо определиться с выбором варианта подключения частотных преобразователей и места их установки, а также системы управления, вы всегда можете обратиться в нашу компанию за помощью в проектировании общей схемы объекта и выбором оптимального оборудования.
вернуться в блог
Схемы любительских преобразователей частоты
Одна из первых схем инвертора для питания трехфазного двигателя была опубликована в журнале «Радио» №11 за 1999 год. Разработчик схемы М.Мухин в то время был учеником 10 класса и занимался радиокружок.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, использовавшегося в станке для сверления печатных плат. Следует отметить, что рабочая частота данного двигателя составляет 400Гц, а напряжение питания 27В. Кроме того, была выведена средняя точка двигателя (при соединении обмоток «звездой»), что позволило предельно упростить схему: выходных сигналов требовалось всего три, а на каждую фазу требовался только один выходной ключ. Схема генератора представлена на рисунке 1.
Как видно из схемы, преобразователь состоит из трех частей: генератора-генератора импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электрического двигатель М1.
На рис. 2 представлены временные диаграммы импульсов, генерируемых генератором-генератором. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно задавать нужные обороты двигателя, а также изменять их в определенных пределах. Более подробную информацию о схеме можно найти в приведенном выше журнале. Следует отметить, что по современной терминологии такие генераторы называются контроллерами.
Более подробную информацию о схеме можно найти в приведенном выше журнале. Следует отметить, что по современной терминологии такие генераторы называются контроллерами.
Рисунок 1.
Рисунок 2. Временные диаграммы импульсов генератора.
На базе контролера Дубровского А. из г. Новополоцка Витебской области. Разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока 220В. Принципиальная схема опубликована в журнале Radio 2001. Номер 4.
В этой схеме практически без изменений используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами А1, А2 и А3, к которым подключен электродвигатель. На схеме показан ключ А1, остальные идентичны. Полная схема устройства представлена на рис. 3.9.0003
Рисунок 3
Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, представленную на рисунке 4.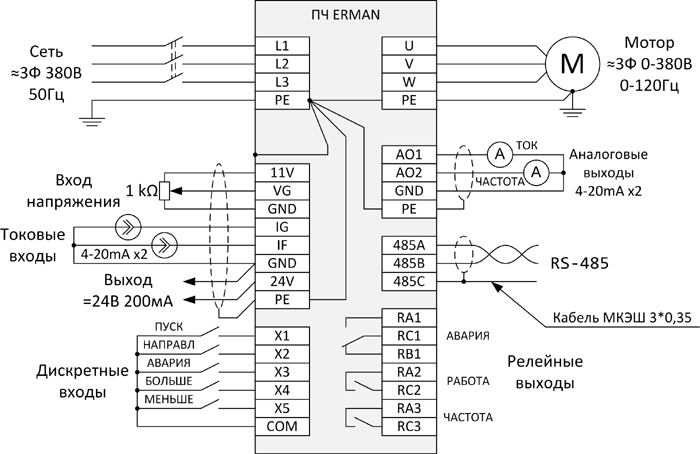
Рисунок 4
На рисунке изображен двигатель М, управляемый клавишами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Электродвигатель питается постоянным напряжением Uд, получаемым от выпрямителя (на рисунке не показан). При этом клавиши V1, V3, V5 называются верхними, а клавиши V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхнего и нижнего ключей, а именно парами V1&V6, V3&V6, V5&V2, совершенно недопустимо: произойдет короткое замыкание. Поэтому для нормальной работы такой ключевой схемы необходимо, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. При недостаточности этой паузы возможно кратковременное открытие верхний и нижний ключи одновременно.Это вызывает нагрев выходных транзисторов, что часто приводит к их выходу из строя.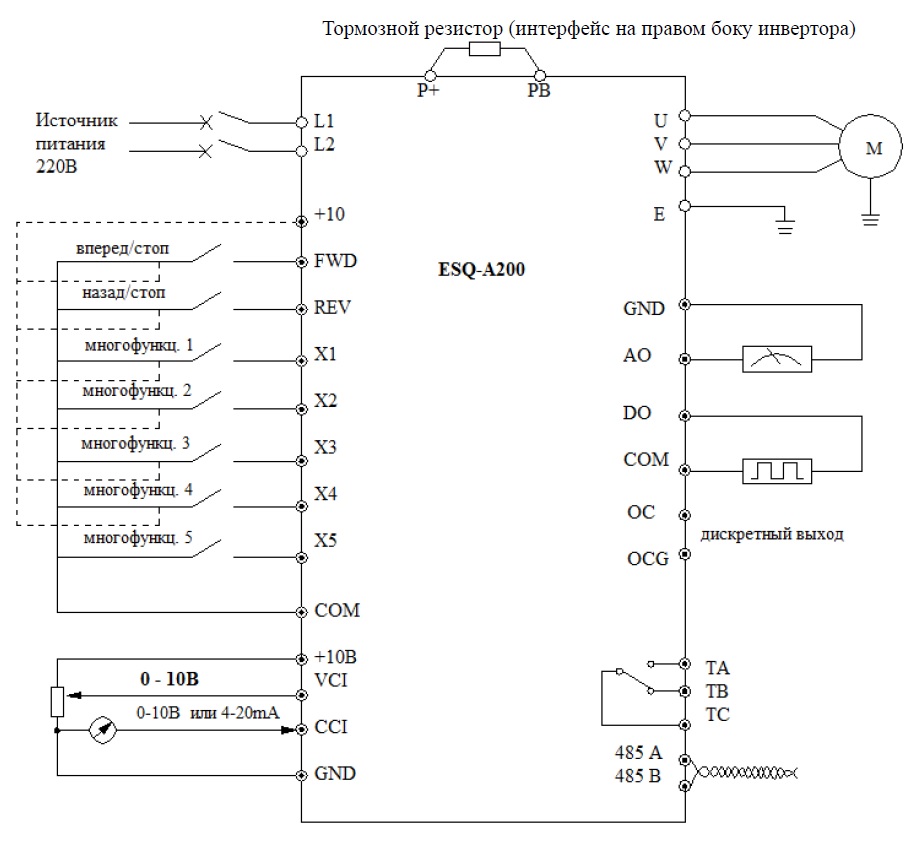 Такая ситуация называется сквозными токами.
Такая ситуация называется сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхние ключи — это транзисторы 1VT3, а нижние 1VT6. Легко видеть, что нижние ключи гальванически связаны с устройством управления и между собой. Поэтому сигнал управления с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подается непосредственно на базу составного транзистор 1VT4…1VT5. Этот составной транзистор является не чем иным, как драйвером нижнего ключа. Точно так же от элементов DD3, DD4 управляются составные транзисторы драйвера нижнего ключа каналов А2 и А3. Все три канала питаются от одного выпрямителя. на диодном мосту VD2.
Верхние ключи гальванической связи с общим проводом и устройством управления не имеют, поэтому для управления ими, кроме драйвера, на составном транзисторе 1VT1…1VT2 пришлось установить дополнительную оптопару 1U1 в каждый канал. Выходной транзистор оптопары в этой схеме также выполняет функцию дополнительного инвертора: при высоком уровне на выходе 3 элемента DD3. 2 транзистор верхнего ключа 1VT3 открыт.
2 транзистор верхнего ключа 1VT3 открыт.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно считать недостатком схемы.
Конденсатор 1С2 обеспечивает задержку переключения ключа около 100 мкс, столько же дает оптопара 1У1, формируя тем самым упомянутую «мертвую зону».
Достаточно ли регулирования частоты?
При уменьшении частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (вспомните только формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при снижении частоты необходимо уменьшать и действующее значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках было предложено регулировать эту наиболее эффективную величину с помощью ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Этот метод был рекомендован в статье С. Калугина «Доработка регулятора скорости трехфазных асинхронных двигателей». Журнал Радио 2002, № 3, с. 31.
Этот метод был рекомендован в статье С. Калугина «Доработка регулятора скорости трехфазных асинхронных двигателей». Журнал Радио 2002, № 3, с. 31.
В любительских условиях механический узел оказался сложным и, главное, ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» № 12 2004 г. Схема этого устройства представлена на рисунках 5 и 6.
Сетевое напряжение 220В подается на автотрансформатор Т1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром С1, L1, С2. На выходе фильтра получается переменное постоянное напряжение Uрег, которое используется для питания самого двигателя.
Рисунок 5
Напряжение Ureg через резистор R1 поступает также на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортное исполнение NE555) В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН ( генератор с регулируемым напряжением). Следовательно, с увеличением напряжения Ureg увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При уменьшении напряжения Ureg пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрева обмоток и перенасыщения магнитопровода статора.
Следовательно, с увеличением напряжения Ureg увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При уменьшении напряжения Ureg пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрева обмоток и перенасыщения магнитопровода статора.
Рисунок 6
В той же журнальной статье автор предлагает вариант задающего генератора, позволяющий избавиться от использования автотрансформатора. Схема генератора представлена на рисунке 7.
Рисунок 7
Генератор выполнен на втором триггере микросхемы DD3, на схеме он обозначен как DD3.2. Частота задается конденсатором С1, частота регулируется переменным резистором R2. Вместе с регулированием частоты изменяется и длительность импульса на выходе генератора: с уменьшением частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Этот принцип управления называется широтно-импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя небольшая, питание двигателя осуществляется прямоугольными импульсами, поэтому ШИМ достаточно примитивен. В реальных промышленных преобразователях частоты большой мощности ШИМ предназначен для формирования практически синусоидального напряжения на выходе, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном крутящем моменте, при постоянной мощности и при вентиляторной нагрузке.
В реальных промышленных преобразователях частоты большой мощности ШИМ предназначен для формирования практически синусоидального напряжения на выходе, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном крутящем моменте, при постоянной мощности и при вентиляторной нагрузке.
Рис. 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе силовые MOSFET или IGBT транзисторы, специально разработанные для работы в преобразователях частоты. В некоторых случаях эти транзисторы объединены в модули, что в целом улучшает работу всей конструкции. Эти транзисторы управляются с помощью специализированных драйверных микросхем. В некоторых моделях доступны драйверы, встроенные в транзисторные модули.
В настоящее время наиболее распространенными микросхемами и транзисторами являются International Rectifier. В описанной схеме вполне можно использовать драйверы IR2130 или IR2132.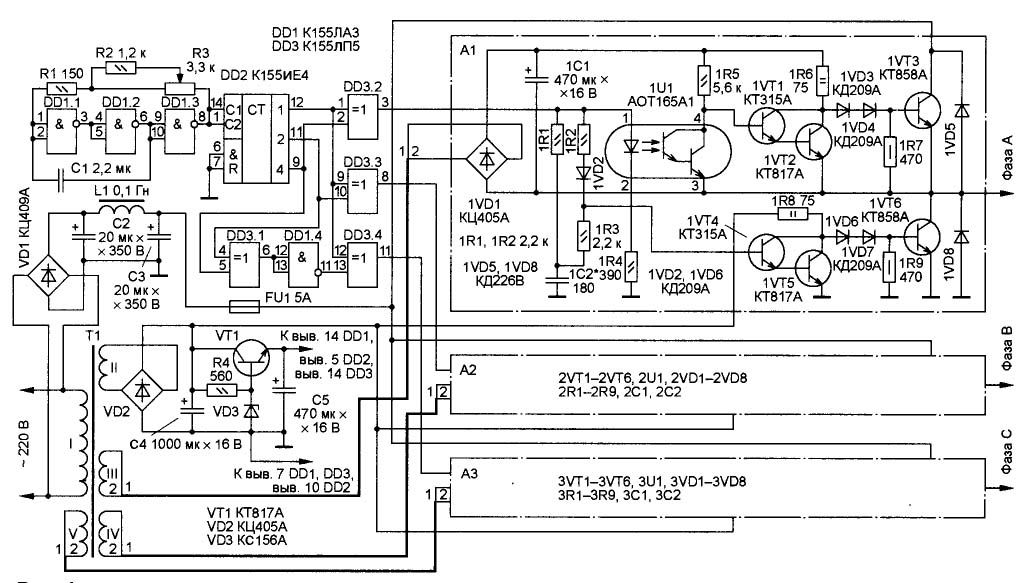 В одном корпусе такой микросхемы сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Помимо основной функции, эти драйверы также содержат несколько дополнительных, например, защиту от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно найти в технических описаниях соответствующих микросхем.
В одном корпусе такой микросхемы сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Помимо основной функции, эти драйверы также содержат несколько дополнительных, например, защиту от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно найти в технических описаниях соответствующих микросхем.
При всех достоинствах единственным недостатком этих микросхем является их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым и в то же время работоспособным путем: специализированные драйверные микросхемы были заменены интегральными микросхемами таймеров КР1006ВИ1. (NE555).
Выходные ключи встроенных таймеров
Если мы вернемся к рис. 6, то увидим, что схема имеет выходные сигналы для каждой из трех фаз, обозначенных как «H» и «B». Наличие этих сигналов позволяет раздельно управлять верхней и нижней клавишами. Такое разделение позволяет создавать паузу между переключением верхней и нижней клавиш с помощью блока управления, а не самих клавиш, как это было показано на схеме на рис. 3.
Такое разделение позволяет создавать паузу между переключением верхней и нижней клавиш с помощью блока управления, а не самих клавиш, как это было показано на схеме на рис. 3.
Схема выходных ключей с использованием микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, для трехфазного преобразователя необходимо три экземпляра таких ключей.
Рисунок 9
В качестве драйверов верхнего (VT1) и нижнего (VT2) ключей используются микросхемы КР1006ВИ1, включаемые по схеме триггера Шмидта. С их помощью можно получить импульсный ток затвора не менее 200 мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних клавиш DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому питаются от этого источника. Микросхемы верхних ключей можно запитать так же, как показано на рисунке 3, используя дополнительные выпрямители и отдельные обмотки на трансформаторе. Но в этой схеме используется другой, так называемый «оживленный» способ питания, смысл которого заключается в следующем.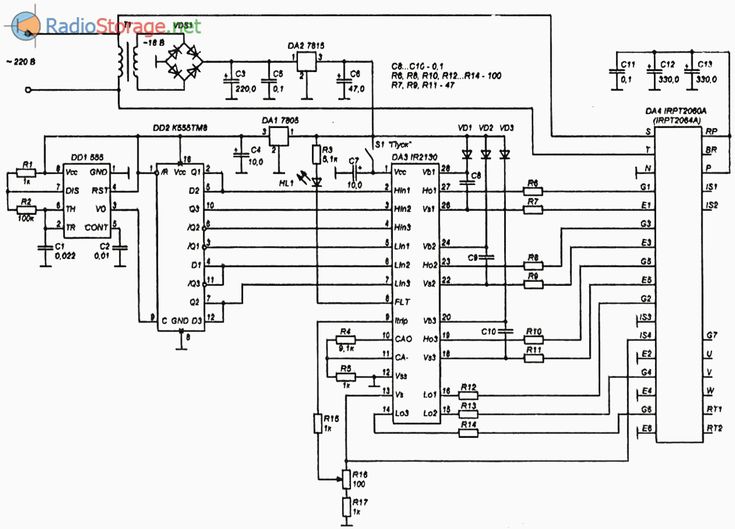 Микросхема DA1 получает питание от электролитического конденсатора С1, заряд которого происходит по цепи: +12В, VD1, С1, открытый транзистор VT2 (через электроды сток — исток), «общий».
Микросхема DA1 получает питание от электролитического конденсатора С1, заряд которого происходит по цепи: +12В, VD1, С1, открытый транзистор VT2 (через электроды сток — исток), «общий».
Другими словами, заряд конденсатора С1 происходит, пока транзистор нижнего ключа открыт. В этот момент минусовой вывод конденсатора С1 практически закорочен на общий провод (сопротивление участка открытый сток-исток мощных полевых транзисторов составляет тысячные доли Ома!), что позволяет его зарядить .
При закрытом транзисторе VT2 закроется и диод VD1, заряд конденсатора С1 прекратится до следующего открытия транзистора VT2. Но заряда конденсатора С1 достаточно для питания микросхемы DA1, пока транзистор VT2 открыт закрыто. Естественно в этот момент транзистор верхнего ключа находится в закрытом состоянии. Эта схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены только самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с чего все началось, и где можно даже рассмотреть все изнутри по схеме.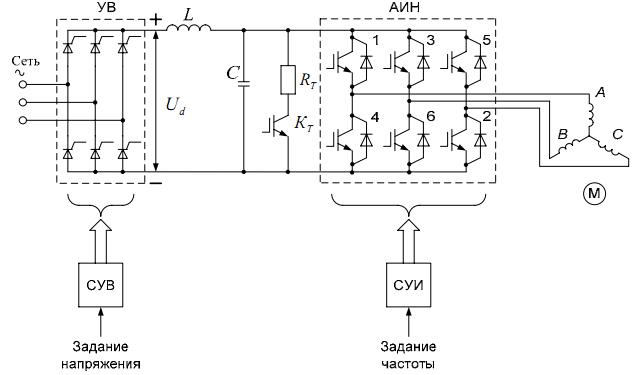 Более современные конструкции выполняются с использованием микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Более современные конструкции выполняются с использованием микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме проще, чем на микросхемах средней степени интеграции, имеют такие необходимые функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их еще называют «прошивок». Блок управления трехфазным инвертором будет зависеть именно от этих программ.
Довольно простые схемы для контроллеров трехфазного инвертора опубликованы в журнале Радио 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи также является автором серии статей о микроконтроллерах и многих других разработках. В статье представлены две простые схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных выключателей, чего вполне достаточно во многих практических случаях. Там же есть ссылка, по которой можно скачать уже готовую «прошивку», и, кроме того, специальную программу, с помощью которой можно изменять параметры «прошивки» по своему усмотрению. Возможна также работа генераторов в режиме «демо». В этом режиме частота генератора снижается в 32 раза, что позволяет визуально с помощью светодиодов наблюдать за работой генераторов. Там же даны рекомендации по подключению силового агрегата.
Там же есть ссылка, по которой можно скачать уже готовую «прошивку», и, кроме того, специальную программу, с помощью которой можно изменять параметры «прошивки» по своему усмотрению. Возможна также работа генераторов в режиме «демо». В этом режиме частота генератора снижается в 32 раза, что позволяет визуально с помощью светодиодов наблюдать за работой генераторов. Там же даны рекомендации по подключению силового агрегата.
Но, если вы не хотите заниматься программированием микроконтроллеров, компания Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его основе можно создавать недорогие системы регулируемого трехфазного привода, содержащие все необходимые функции управления и защиты. Такие микроконтроллеры все чаще используются в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC можно использовать готовые модули питания, например IRAMS10UP60A разработки International Rectifier. Модули содержат шесть силовых ключей и схему управления. Для получения более подробной информации об этих элементах см. их документацию Data Sheet, которую легко найти в Интернете.
Модули содержат шесть силовых ключей и схему управления. Для получения более подробной информации об этих элементах см. их документацию Data Sheet, которую легко найти в Интернете.
Борис Аладышкин
Радиочастотное преобразование постоянного тока в постоянный
Автор(ы)
Rivas, Juan, 1976-Скачать полную версию для печати (27.96Mb)
Альтернативное название
Радиочастотное преобразование постоянного тока в постоянный ток
Другие участники
Массачусетский технологический институт. Кафедра электротехники и компьютерных наук.
Советник
Дэвид Дж. Перро.
Условия использования
Массачусетский технологический институт диссертации защищены авторским правом. Их можно просматривать из этого источника для любых целей, но воспроизведение или распространение в любом формате запрещено без письменного разрешения. См. предоставленный URL-адрес для запросов о разрешении.
http://dspace.mit.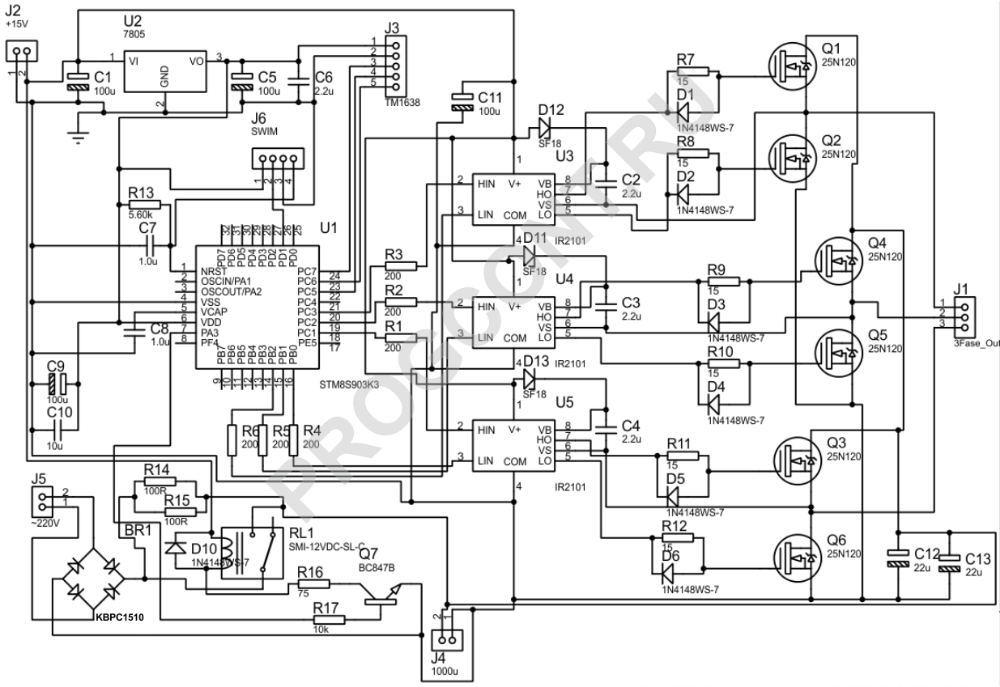 edu/handle/1721.1/7582
edu/handle/1721.1/7582
Метаданные
Показать полную запись позицииAbstract
ЭТОТ ТЕЗИС посвящен разработке системных архитектур и топологий цепей для преобразования мощности постоянного тока в постоянный на очень высоких частотах. Разрабатываемые системные архитектуры структурированы таким образом, чтобы преодолевать ограничения, связанные с традиционными конструкциями. В частности, описанные здесь новые архитектуры структурируют функции обработки энергии и управления системы таким образом, чтобы можно было достичь высокой эффективности в широком диапазоне нагрузки при регулировании выходной мощности. Более того, эти архитектуры подходят для схем, работающих на фиксированной частоте и коэффициенте заполнения, что значительно упрощает проектирование схем. В диссертации также разрабатываются новые конструкции схем, которые хорошо подходят для этих новых архитектур. В рамках этого представлены два новых привода затвора и методы управления, которые значительно снижают потери в затворе на частотах ОВЧ для работы с фиксированной частотой и фиксированным коэффициентом заполнения.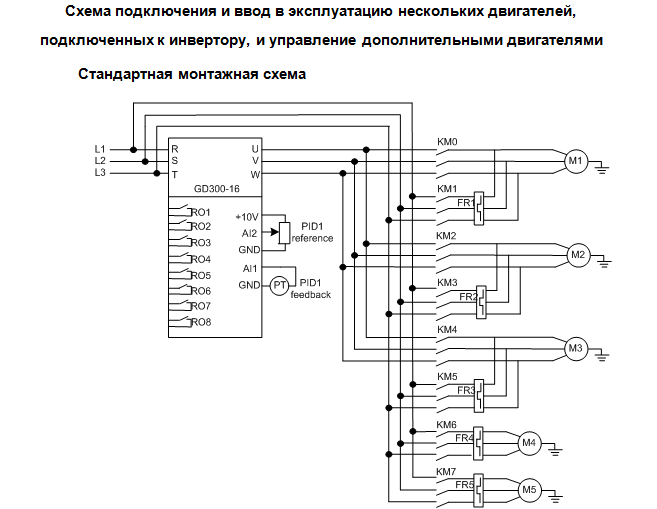 Одна из этих схем затвора обеспечивает близкие к теоретическим минимальные потери за счет резонансной формы волны напряжения затвора, чтобы оно имело трапециевидное управляющее напряжение. Затем этот подход к формированию формы волны был сделан еще на шаг вперед, в результате чего появился новый класс преобразователей постоянного тока, который обеспечивает значительное снижение нагрузки на пиковое напряжение переключения, требует небольших пассивных компонентов с низким запасом энергии и обеспечивает возможность чрезвычайно быстрого запуска и отключения. Этот новый класс преобразователей хорошо адаптирован к архитектурам и методам управления затвором, предложенным в диссертации. Ожидается, что представленные здесь новые архитектуры и конструкции схем будут способствовать разработке силовых преобразователей со значительно уменьшенными размерами и улучшенными переходными характеристиками.
Одна из этих схем затвора обеспечивает близкие к теоретическим минимальные потери за счет резонансной формы волны напряжения затвора, чтобы оно имело трапециевидное управляющее напряжение. Затем этот подход к формированию формы волны был сделан еще на шаг вперед, в результате чего появился новый класс преобразователей постоянного тока, который обеспечивает значительное снижение нагрузки на пиковое напряжение переключения, требует небольших пассивных компонентов с низким запасом энергии и обеспечивает возможность чрезвычайно быстрого запуска и отключения. Этот новый класс преобразователей хорошо адаптирован к архитектурам и методам управления затвором, предложенным в диссертации. Ожидается, что представленные здесь новые архитектуры и конструкции схем будут способствовать разработке силовых преобразователей со значительно уменьшенными размерами и улучшенными переходными характеристиками.
Описание
Диссертация (доктор философии) — Массачусетский технологический институт, кафедра электротехники и компьютерных наук, февраль 2007 г.
