Из каких основных блоков состоит микроконтроллер. Как взаимодействуют между собой центральный процессор, память и периферийные устройства микроконтроллера. Какие функции выполняют ключевые компоненты структурной схемы МК.
Основные компоненты микроконтроллера
Микроконтроллер (МК) представляет собой микросхему, объединяющую на одном кристалле процессор, память и набор периферийных устройств. Рассмотрим ключевые компоненты, входящие в состав типичного микроконтроллера:
- Центральное процессорное устройство (ЦПУ) — выполняет арифметические и логические операции, управляет работой остальных блоков
- Память программ (ПЗУ) — хранит программный код
- Оперативная память (ОЗУ) — используется для временного хранения данных
- Порты ввода-вывода — обеспечивают взаимодействие с внешними устройствами
- Таймеры — отсчитывают временные интервалы
- АЦП — преобразует аналоговые сигналы в цифровой вид
- Интерфейсы — обеспечивают обмен данными с другими устройствами
Структурная схема микроконтроллера
Структурная схема типичного микроконтроллера включает следующие основные блоки:

- Ядро — содержит ЦПУ, регистры, АЛУ
- Шины — обеспечивают обмен данными между блоками
- Память — ПЗУ и ОЗУ
- Периферийные устройства — порты, таймеры, АЦП и др.
- Тактовый генератор — задает частоту работы МК
- Блок управления питанием
Все блоки связаны системой шин и работают под управлением ЦПУ, которое выполняет инструкции из памяти программ.
Принцип работы микроконтроллера
Принцип работы микроконтроллера можно описать следующим образом:
- ЦПУ считывает очередную инструкцию из памяти программ
- Инструкция декодируется и выполняется
- При необходимости происходит обращение к памяти данных
- Выполняются операции ввода-вывода через порты
- Обрабатываются прерывания от периферийных устройств
- Цикл повторяется для следующей инструкции
Таким образом, микроконтроллер последовательно выполняет заложенную в него программу, взаимодействуя с внешними устройствами через свою периферию.
Функции основных блоков микроконтроллера
Рассмотрим более подробно функции ключевых компонентов структурной схемы микроконтроллера:
Центральное процессорное устройство (ЦПУ)
ЦПУ является «мозгом» микроконтроллера и выполняет следующие основные функции:
- Выборка инструкций из памяти программ
- Декодирование и выполнение инструкций
- Выполнение арифметических и логических операций
- Обработка прерываний
- Управление работой остальных блоков МК
Память программ и данных
Память микроконтроллера обычно разделена на два типа:
- Память программ (ПЗУ) — хранит код программы и константы
Объем памяти может составлять от нескольких килобайт до мегабайт в зависимости от модели МК.
Порты ввода-вывода
Порты ввода-вывода обеспечивают взаимодействие микроконтроллера с внешними устройствами. Они могут быть настроены как на ввод, так и на вывод сигналов.
Периферийные устройства микроконтроллера
Большинство современных микроконтроллеров содержат на кристалле различные периферийные устройства, расширяющие их функциональность:
Таймеры/счетчики
Таймеры используются для отсчета временных интервалов и генерации прерываний по их истечении. Счетчики могут подсчитывать внешние события.
Аналого-цифровой преобразователь (АЦП)
АЦП позволяет преобразовывать аналоговые сигналы в цифровой вид для дальнейшей обработки микроконтроллером. Это дает возможность работать с различными датчиками.
Интерфейсы передачи данных
Микроконтроллеры обычно оснащаются различными последовательными интерфейсами для обмена данными с другими устройствами:
- UART — асинхронный интерфейс
- SPI — синхронный последовательный интерфейс
- I2C — двухпроводной интерфейс
- USB — универсальная последовательная шина
Особенности архитектуры микроконтроллеров
Существует два основных типа архитектуры микроконтроллеров:
Гарвардская архитектура
При гарвардской архитектуре память программ и память данных физически разделены и имеют отдельные шины обращения. Это позволяет одновременно обращаться к обоим видам памяти, повышая производительность.
Архитектура фон Неймана
В архитектуре фон Неймана используется общая память для хранения и данных, и программ. Это упрощает конструкцию, но снижает быстродействие.
Большинство современных микроконтроллеров используют модифицированную гарвардскую архитектуру, сочетающую преимущества обоих подходов.
Заключение
Структурная схема микроконтроллера объединяет в одном корпусе процессорное ядро, память и набор периферийных устройств. Это позволяет создавать компактные и энергоэффективные системы управления для широкого спектра применений. Понимание принципов работы и взаимодействия основных блоков микроконтроллера необходимо для его эффективного программирования и использования.
microcontroller*) дословно, то получится «миниатюрное устройство, предназначенное для управления». Здесь принято во внимание, что термин «control» в англоязычных текстах гораздо чаще имеет значение «управлять», чем «контролировать». На практике в функции МК входит контроль и управление производственными процессами, бытовыми приборами, спецтехникой, системами сбора информации, принтерами, факсами, сотовыми телефонами и т.д.
Следует отличать МК от микропроцессоров, микроконверторов, цифровых сигнальных процессоров и микрокомпьютеров. Слова по звучанию похожие, но по смыслу разные. Что их объединяет — это наличие в одном корпусе набора узлов, пригодных для построения функционально законченной системы управления.
Исторически первыми появились микропроцессоры. Их родоначальником стала микросхема i4004, которую фирма Intel представила миру 15 ноября 1971 г.
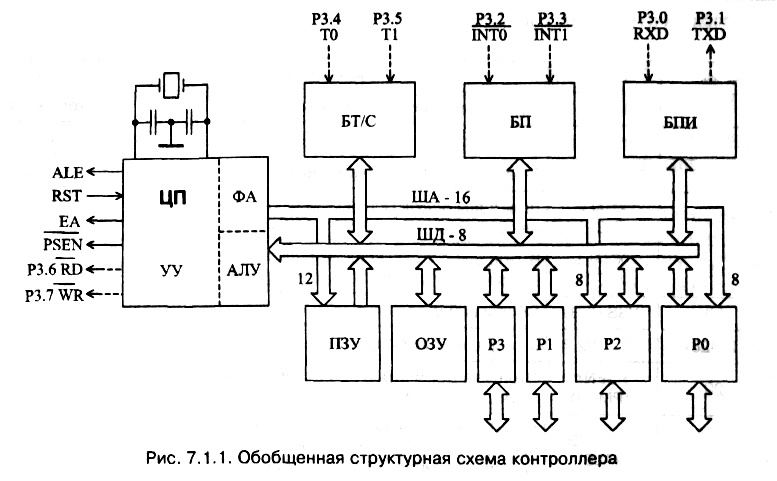
Обобщённая структурная схема типового микропроцессора показана на Рис. 1.1. В его основе — центральное процессорное устройство (ЦПУ), которое содержит арифметический вычислитель, логическое ядро и регистры общего назначения. С внешним миром ЦПУ общается при помощи трёх шин: адреса, данных и управления. По этим же шинам в него поступают коды управляющей программы, которая хранится на внешнем носителе. Начальная установка регистров ЦПУ производится по сигналу сброса RESET, а синхронизация работы осуществляется от тактовых импульсов SYN.
Рис. 1.1. Структурная схема микропроцессора.
Разделение процессоров на обычные процессоры и микропроцессоры возникло в 1970-х годах с началом производства больших интегральных схем (БИС). Радиолюбители со стажем хорошо помнят микропроцессоры КР580ВМ80А и Zilog Z80A, применявшиеся в первых домашних компьютерах «Радио-86РК», «Специалист», «ZX-Spectnim», а также в телефонах с АОН — автоматическим определителем номера абонента.
Если к ЦПУ на кристалл добавить оперативное и постоянное запоминающие устройства (ОЗУ, ПЗУ), таймеры, счётчики, аналого-цифровые и цифроаналого-вые преобразователи (АЦП, ЦАП), интерфейсные узлы и порты ввода/вывода, то микропроцессор превратится в МК (Рис. 1.2). Первые МК были разработаны фирмой Intel в 1976 г. У истоков стояло семейство MCS-48 во главе с первенцем — микросхемой i8048. Существует и другое мнение, согласно которому первым МК был четырёхбитный TMS1000 фирмы Texas Instruments (1972 г.), котсфый содеpжал 32 байта ОЗУ, 1 Кбайт ПЗУ, часы реального времени и систему ввода/вывода. В середине 1980-х годов в СССР появились первые аналоги семейств MCS-48/51 на популярных БИС из серий К1816, КР1830. Их называли однокристальными микро-ЭВМ или программируемыми контроллерами, но в лексике эти термины не закрепились.
Согласно одному из многих определений, МК — это специализированный микропроцессор, оснащённый приборными интерфейсами. Главным отличием между микропроцессором и МК является самодостаточность и способность к «самовыживанию» последнего. Например, тактовые импульсы вырабатывает встроенный синхрогенератор, который может работать как автономно, так и от внешнего кварцевого резонатора. Порты ввода/вывода гибко перестраивают свои функции и могут напрямую соединяться с датчиками и исполнительными устройствами. Управляющая программа хранится во внутреннем, а не во внешнем, ПЗУ. Её легко стирать и модифицировать, поскольку современные МК содержат многократно перезаписываемую флэш-память (FLASH). Для программирования обычно используется интерфейс ISP (In-System Programming), который не требует извлечения МК из панельки в печатной плате.
Иногда МК уменьшительно называют «контроллерами». Здесь надо правильно понимать смысл, к чему относится фраза, ведь существуют и настоящие «промышленные контроллеры», представляющие собой готовое изделие или печатную плату с радиоэлементами, среди которых может находиться процессор и МК.
Рис. 1.2. Структурная схема МК.
Микроконвертор — это удачное рекламное изобретение фирмы Analog Devices. Первым микроконвертором был ADuС812, выпущенный в 1998 г. Ключевое слово «MicroConverter» является официальной торговой маркой и защищено юридическими правами. Относится оно к линейкам микросхем ADuC7xxx, ADuC8xx, выполняющих функцию центрального ядра интеллектуальных систем сбора информации.
«Изюминкой» микроконверторов является быстродействующий прецизионный АЦП, дополненный универсальным блоком логической обработки данных и многоразрядным ЦАП. Если учесть сверхнизкое потребление тока и малые габариты микроконверторов, то становится ясно, что специализированные «АДуКи» по праву занимают свою нишу на рынке.
Тем не менее, структурные схемы у микроконверторов и МК полностью совпадают. Однако принципиальная разница всё же имеется. Заключается она в идеологии разработки — «Что первично, курица или яйцо?». Для обычного МК сначала выбирается цифровое вычислительное ядро, а затем к нему добавляется АЦП и ЦАП. В противоположность этому, ядром микроконвертора изначально служит связка прецизионных АЦП и ЦАП, к которым добавляется управляющий процессор. Такие рассуждения вполне логичны, учитывая богатый опыт фирмы Analog Devices в разработке уникальных по параметрам аналоговых микросхем.
Цифровые сигнальные процессоры (англ. DSP — Digital Signal Processor) тоже относятся к подвиду «микроконтроллерных» (Рис. 1.3). Их «коньком» является обработка широкополосных сигналов в режиме реального времени. Это характерно как для аудио/видео техники, так и для систем гибкого управления роботизированными комплексами. Достижению цели способствует высокое быстродействие ядра сигнального процессора (СП), многопотоковая система обслуживания памяти и наличие аппаратных математических команд, например, для быстрого преобразования Фурье. Обычные МК такими возможностями не обладают.
Первые DSP появились в конце 1970-х годов через несколько лет после первых МК, однако высокая цена и технологические ограничения того времени не позволили им соревноваться на равных. Лишь в 1982 г. фирма Texas Instruments сделала революционный прорыв, выпустив в продажу первый универсальный программируемый DSP TMS32010. Его концепция стала стандартом «де-факто» для всех последующих сигнальных процессоров и их собратьев — цифровых сигнальных контроллеров (англ. DSC — Digital Signal Controller). К числу последних,
Рис. 1.3. Структурная схема DSP.
в частности, относится известное среди радиолюбителей семейство dsPIC фирмы Microchip Technology Inc. (сокращённо Microchip).
Различия в архитектуре и узкая специализация привели к тому, что направление DSP/DSC выделилось в отдельную от МК сферу разработок с количеством разновидностей моделей более 300. Считается, что основным отличительным признаком DSP является отсутствие развитой системы команд управления, т.е. условных переходов, косвенных вызовов подпрограмм и т.д., которые необходимы для выполнения задач сопряжения с внешними объектами. Процессор в DSP и его система команд ориентированы на наивысшую скорость преобразования поступающих входных данных. На управленческие «мелочи» вычислительных ресурсов уже не хватает.
Как показало время, уход DSP из микроконтроллерной «альма-матер» получился не долгим. Сейчас наступает этап мирной конвергенции. Современные МК заимствуют от DSP аппаратное умножение и специализацию команд, а DSP заимствуют от МК универсальные интерфейсы ввода/вывода и гибкость в платформе программирования. Грани различий постепенно стираются.
В начале 1980-х годов с лёгкой руки японской фирмы Hitachi в обиход вошло «новое старое» название «микрокомпьютер». Этим звучным термином в даташи-тах стали называть быстродействующие процессоры линейки «Hitachi SuperH». В рекламе возможностей чипов «SuperH microcomputer SH7000 series» подчёркивалось, что на одной микросхеме теперь можно построить управляющую систему реального времени, превышающую по производительности обычный настольный микрокомпьютер.
Надо знать, что в те годы к микрокомпьютерам относили и «продвинутые» калькуляторы фирмы Hewlett Packard, и домашние компьютеры «Apple-II», и облегчённые модели специализированных вычислителей для научных экспериментов. Интересно, что впервые слово «микрокомпьютер» в 1956 г. употребил американский писатель-фантаст Айзек Азимов [1-1].
Современный микрокомпьютер (Рис. 1.4) содержит все составляющие МК или DSP, но вдобавок имеет на борту контроллер шин для подключения внешней высокоскоростной памяти, а также аудио- и видеопроцессоры. Последние, как правило, не уступают ЦПУ по сложности и функциональности. Примеры упрощённых микрокомпьютеров из повседневной жизни — это однокристальные СБИС китайских клонов игровых приставок «Dendy», «SEGA Mega Drive-II».
Рис. 1.4. Структурная схема микрокомпьютера.
Современные технологии добавляют новые штрихи к устоявшейся классификации микросхем. Перспективным считается объединение разных вычислительных архитектур на одном кристалле, что стало возможным благодаря повышению степени интеграции транзисторов. Сейчас производят двухядерные чипы, содержащие одновременно ЦПУ, что характерно для МК, и сигнальный процессор, что характерно для DSP. Первый из них управляет исполнительными механизмами, а второй осуществляет обработку данных. Именно такую структуру имеет встраиваемый 32-битный сигнальный контроллер 1892ВМ3Т на базе российской платформы «Мультикор» [1-2].
Слово «микро» в названии современных МК порой звучит весьма архаично. Например, «девайс» AT91CAP9S500A фирмы Atmel согласно даташиту называется «Customizable Microcontroller Processors Но можно ли всерьёз говорить о микросвойствах изделия, которое размещается в корпусе с 400 (!) выводами, имеет тактовую частоту 200 МГц, поддержку DSP-команд, звуковой процессор, десяток встроенных периферийных интерфейсов и 500 тысяч вентилей ПЛИС?
Сейчас уже не спорят о том, к какому подвиду относится очередной сверхбольшой чип, а рассуждают о конкретном режиме его работы. К примеру, в одних изделиях он может использоваться как быстродействующий DSP, в других — как многопортовый МК, в третьих — как управляющий центральный процессор с собственной операционной системой и т.д.
1.1. Знакомство с микроконтроллером . Микроконтроллеры AVR: от простого к сложному
В этой главе мы кратко познакомимся с микроконтроллерами. Микроконтроллеры являются сердцем многих современных устройств и приборов, в том числе и бытовых. Самой главной особенностью микроконтроллеров, с точки зрения конструктора-проектировщика, является то, что с их помощью легче и зачастую гораздо дешевле реализовать различные схемы.
На рис. 1.1 изображена структурная схема типичного современного микроконтроллера.
Рис. 1.1. Структурная схема микроконтроллера
Из рисунка видно, что микроконтроллер может управлять различными устройствами и принимать от них данные при минимуме дополнительных узлов, так как большое число периферийных схем уже имеется непосредственно на кристалле микроконтроллера. Это позволяет уменьшить размеры конструкции и снизить потребление энергии от источника питания.
Для сравнения: при использовании традиционных микропроцессоров приходится все необходимые схемы сопряжения с другими устройствами реализовывать на дополнительных компонентах, что увеличивает массу, размеры и потребление электроэнергии.
Давайте рассмотрим типичные схемы, присутствующие в микроконтроллерах.
1. Центральное процессорное устройство (ЦПУ) — сердце микроконтроллера. Оно принимает из памяти программ коды команд, декодирует их и выполняет. ЦПУ состоит из регистров, арифметико-логического устройства (АЛУ) и цепей управления.
2. Память программ. Здесь хранятся коды команд, последовательность которых формирует программу для микроконтроллера.
3. Оперативная память данных. Здесь хранятся переменные программ. У большинства микроконтроллеров здесь расположен также стек.
4. Тактовый генератор. Этот генератор определяет скорость работы микроконтроллера.
5. Цепь сброса. Эта цепь служит для правильного запуска микроконтроллера.
6. Последовательный порт — очень полезный элемент микроконтроллера. Он позволяет обмениваться данными с внешними устройствами при малом количестве проводов.
7. Цифровые линии ввода/вывода. По сравнению с последовательным портом с помощью этих линий возможно управлять одновременно несколькими линиями (или проверять несколько линий).
8. Таймер. Используется для отсчета временных интервалов.
9. Сторожевой таймер. Это специальный таймер, предназначенный для предотвращения сбоев программы. Он работает следующим образом: после запуска он начинает отсчет заданного временного интервала. Если программа не перезапустит его до истечения этого интервала времени, сторожевой таймер перезапустит микроконтроллер. Таким образом, программа должна давать сторожевому таймеру сигнал — все в порядке. Если она этого не сделала, значит, по какой-либо причине произошел сбой.
Как работает микроконтроллер и из чего он состоит
Микроконтроллер (МК) — представляет собой своего рода микрокомпьютер, на котором можно выполнять различного рода функции. Этот микрокомпьютер или микросхема работает по специальной программе, эту программу пишут программисты на таких языках программирования как C++,Pascal,Assembler и другие, после компиляции загружают исполняемый код в память микроконтроллера.
Это код содержит инструкции, объясняющие МК как и что и в какой последовательности ему делать, откуда что брать с чем складывать куда выводить и т.д.
Каждый МК отличается друг от друга набором модулей или функций которые он может выполнять, к примеру один МК может иметь 1 АЦП а другой сразу несколько на совем борту, от этого будет зависить стоимость МК.
Также в состав МК могут входить таймеры, аналоговые компораторы, USB, CAN, UART. О этих интрефейсах будет сказано потом. А пока давайте разберемся из чего состои микроконтроллер и как он работает.
Основные узлы микроконтроллера
- ОЗУ — как вы догадалить это оперативная память;
- ПЗУ — постоянная память;
- порты ввода/вывода;
- генератор тактовой частоты;
- таймеры;
- АЛУ-арифметико-логическое устройтсво.
Структурная схема работы микроконтроллера
Арифметико-логическое устройство
Основой любого МК является АЛУ, в этом узле производятся все возможные арифметические — сложение, вычитание, сравнение и логические операции. В зависимости от того с каким числом разрядов может работать МК , они бывают 8-ми, 16-ти и 32-разрядные.
Если например микроконтроллера имеет 8-ми разрядное АЛУ, то он может выполнить какую либо операцию только с 8-ми разрядными числами и выдать такой-же результат.
К логическим операциям относятся:
- умножение-логическое «И»;
- сложение — логическое «ИЛИ»;
- отрицание — логическое «НЕ»;
- исключающее «ИЛИ»;
- сдвиг влево;
- сдвиг вправо;
Также и МК есть и другого рода операции такие как сброс в «0» или установка в «1» которые не относятся ни к арифмитическим не к логическим операциям.
Регистр общего назначения (РОН)
Произведенные в АЛУ операции возвращают результат вычисления- тоже число которое нужно где то хранить.
Хранение таких результатов осуществляется в регистрах общего назначения (РОН) — такие регистры выполняют своего рода роль временной памяти. У каждого микронтроллера кол-во таких РОН может быть разным. На примере структурной схемы МК указаны 32 регистра общего назначения.
Но такие регистры имеют очень небольшой объем памяти и предназначены для временного хранения данных в процессе работы АЛУ. Для более длительного времени хранения информации используются ОЗУ, которая имеет больший объем нежели РОН.
Постоянно запоминающее устройство(ПЗУ)
Инструкции или последовательность команд для AЛУ хранятся в постоянной памяти — ПЗУ которая представляет собой Flash-память, именно в нее мы записываем исполняемый код написанной нами программы. Каждой команде в ПЗУ соответствует определенный адрес.
Если мы хотим получить какую либо команду то мы должны обратиться к адресу этой команды, обращение к адресам ПЗУ осуществляет счетчик команд.
После того как мы обратитиль к адресу той или иной командны, данные из ПЗУ поступает в регистр команд. АЛУ мониторит наличие команды в регистре и при ее наличии начинает ее выполнять.
Порты ввода/вывода
Для того чтобы наш МК взамодейтствовать с внешним миром существуют порты ввода вывода, именно на них цепляется внешие устройства будть то это кнопка, светодиот, LSD экран или подключение по USB интрефейсу.
Порты можно настроить на прием данных, так и на передачу. Для настройки портов существуют специальные регистры. Для настройки портов на ввод/вывод в эти регистры записываются определенные значения.
Также очень важным узлом любого микронтроллера является тактовый генератор, который синхронизирует работы всего МК. Он может быть как внешним так и внутренним.
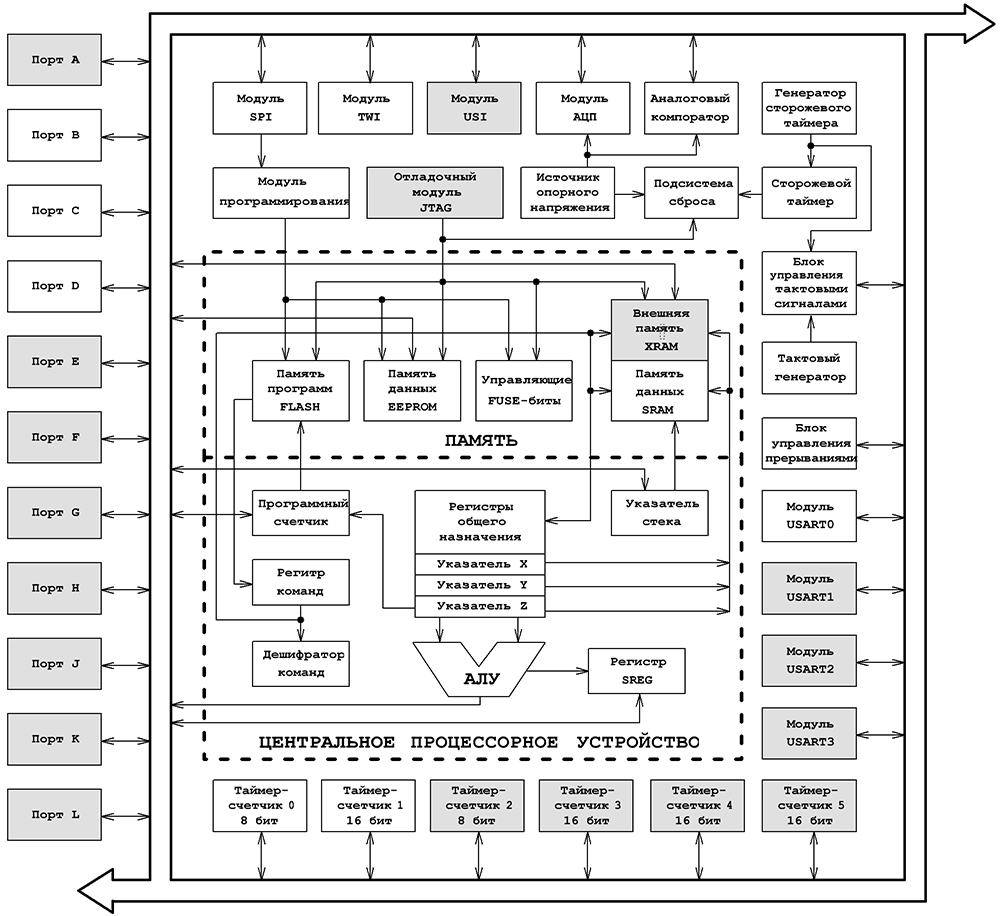
Структурная схема микроконтроллера AVR фирмы Atmel семейства Mega
Структурная схема микроконтроллера AVR фирмы Atmel семейства Mega
[pic 1]
Рисунок 8
На рисунке 8 приведена структурная схема микроконтроллера AТMega8. Ядро МК имеет богатую систему команд с 32 универсальными рабочими регистрами. Все 32 регистра непосредственно связаны с арифметическим логическим модулем (ALU), позволяя общаться двум регистрам в одной команде, выполняемой за один тактовый цикл, так что ATmega8 достигают пропускных способностей, приближающихся к 1 MIPS на МГц. МК обладает следующими возможностями: 8Kбайт встроенной системной flash-памяти, 512 байт EEPROM, 1Kбайт ОЗУ SRAM; 23 линии ввода-вывода, 32 универсальных рабочих регистра, три гибких таймера/счетчика с режимами сравнения, внутренние и внешние прерывания; последовательный универсальный синхронно-асинхронный приемопередатчик USART, последовательный двухпроводный интерфейс TWI, последовательный синхронный интерфейс SPI; 6 -канальный 10-разрядный аналого-цифровой преобразователь, программируемый сторожевой таймер со встроенным генератором; пять программных режимов экономии энергии; имеется аппаратный умножитель, компаратор. Быстродействие МК повышает использование конвейеризации, которая заключается в том, что во время выполнения текущей команды производится выборка из памяти и дешифрация следующей команды.
Преобразование входного сигнала в численное представление происходит относительно опорного напряжения. Опорное напряжение (Аref) — эталонное напряжение, относительно которого происходит преобразование входной величины. При использовании АЦП микроконтроллера AtMega8, опорное напряжение необходимо подавать на соответствующую ножку контроллера Aref.
Рассмотрим регистры, отвечающие за конфигурацию АЦП микроконтроллера AtMega8. АЦП в AtMega8 имеет 8 входных каналов ADC0 – ADC7. В нашем случае мы используем только вход ADC0. За выбор входного канала, а так же настройку опорного напряжения отвечает регистр ADMUX, представленный на Рисунке 9.
4. Структурная схема. Разработка контроллера управляющего работой холодильника
Похожие главы из других работ:
Внедрение системы мониторинга водно-химического режима на энергоблоках Пермской ГРЭС
4.СТРУКТУРНАЯ СХЕМА
Размещено на http://www.allbest.ru Д1, Д2, Д3 — датчики температуры температуры ТС-Б; Д4, Д5, Д6 — датчики уровня Pointek CLS 100; Д7, Д8, Д9 — датчики кислотности 371 pH/ORP; ПК — персональный компьютер для оператора Excimer Pro; С.Б.№1 — сервер блока №1; К.Б…
Кодовый замок
3.1 Структурная схема
…
Проект внутризоновой волоконно-оптической линии связи между населенными пунктами Кемерово-Киселевск
6. Структурная схема организации связи и схема размещения регенераторов
Рисунок 6.1. Структурная схема ВОСП «SDH-мультиплексор FlexGain A155» Длина трассы составляет 387,31 км.. Между Кемерово и Полысаево расстояние равно 195 км. Для уравнивания расстояний между НРП я выбираю длину РУ, равной 39 км…
Проект цифровой системы сельской телефонной сети на базе SI 2000 V5
1.1 Структурная схема СТС
Особенностью СТС является наличие мелких абонентских групп, удаленных друг от друга на значительные расстояния. Поэтому на СТС используют станции малой и средней емкостей, т.е…
Проектирование ЦС СТС на базе SI-2000
1.1 Структурная схема СТС
Сельские телефонные сети имеют ряд особенностей, во многом определяющих принципы их построения. При организации СТС стремятся всемерно повысить использование линейных сооружений…
Промерный эхолот
Структурная схема
ЗГ — Задающий генератор, ФП — формирователь посылки, УМ — Усилитель мощности, ПИА — приемно-излучающая антенна, ЛУ — линейный усилитель, УО — усилитель ограничитель, УФ — усилитель фильтр, Д — детектор, ФНЧ — фильтр низкой частоты…
Разработка термометр-часов
3.1 Структурная схема
Структурная схема изделия весьма проста, и изображена на рисунке 1. Основное в данной системе — функциональная схема и алгоритмы работы. Установка происходит при помощи кнопок управления…
Разработка устройства для приема информации с сигнальных точек системы частотно-диспетчерского контроля
1.2 Структурная схема ЧДК
На рисунке 1.1а показана структурная схема ЧДК для сбора информации с перегонных установок и передачи ее на промежуточные станции и диспетчерский пост (8,10,12,… — номера сигнальной установки. 8-22, 4-20,… — первая цифра обозначает номера частоты ГК…
Разработка цифрового микропрограммного автомата
2 СТРУКТУРНАЯ СХЕМА МПА
Процессор осуществляет непосредственно обработку данных и программное управление процессом обработки данных. Он синтезируется в виде соединения двух устройств: операционного и управляющего (рисунок 1)…
Разработка цифрового термометра
2. Структурная схема
Назначение микроконтроллера PIC16f628A Осуществляет управление всей системой, а именно: периодически опрашивает датчик, обрабатывает полученные данные, раскладывает данные в вид, удобный для вывода на семисегментные индикаторы…
Синтез блока управления операции сложения в арифметико-логическом устройстве
3. Структурная схема АЛУ
Структурная схема АЛУ строится в соответствии с общей последовательностью операции сложения. АЛУ имеет типовую структуру, представленную на рисунке 2…
Система автоматического регулирования уровня на КСУ-1,2,3 на КСП-5
2.1 Структурная схема САР
Спроектированная система автоматического регулирования уровня на КСУ-1,2,3 на КСП — 5 необходимо проверять на устойчивость и качество, для этого необходимо разработать математическую модель спроектированной системы…
Система автоматического регулирования фокусировки пятна
2. Структурная схема САР
В силу малого значения Tф передаточная функция датчика положения принимает вид: W1(P) = kдп Определим передаточную функцию разомкнутой системы: W(P) = Wдп (P) * WЛЭД(P) * Wп(P) W(P) = 1784,3 /(S(5*10-4P+1)(0.33P+1)) K1 = 1784,3; 20LogK1=65 дб T1 = 0…
Теория автоматического управления
3. СТРУКТУРНАЯ СХЕМА САУ
Структурная схема САУ составляется с учётом заданных передаточных функций элементов САУ и их параметров. Она изображается в виде связанных между собой звеньев, с указанием их передаточных функций…
Техническое задание на проектирование радиоприемного устройства
1.10 Структурная схема
Рисунок 3 Структурная схема профессионального коротковолнового…
Отладочная плата на основе микроконтроллера STM32G070RB
NUCLEO-G070RB – отладочная плата (Рис. 1 – Рис. 2) семейства STM32 NUCLEO-64 для микроконтроллера STM32G070RB (Рис. 3). МК базируется на 32-разрядном высокопроизводительном ARM Cortex-M0+ RISC ядре, работающем на частотах до 64 МГц. Предлагая высокий уровень интеграции, микроконтроллер отлично подойдет для широкого спектра потребительских, индустриальных, IoT и других приложений. Микросхема включает в себя блок защиты памяти (MPU), высокоскоростную встроенную память (128 КБ флэш, 36 КБ ОЗУ), DMA, а также расширенный набор системных функций, I/O и периферии. Чип предоставляет стандартные коммуникационные интерфейсы (два I2C, два SPI/ один I2S и четыре USART), один 12-битный АЦП (2.5 MSPS) с количеством каналов до 19, RTC с низким энергопотреблением, продвинутый таймер управления ШИМ, пять 16-битных таймеров общего назначения, два базовых сторожевых таймера и таймер SysTick.
Микросхема работает при температурах окружающей среды от -40°C до +85°C. Диапазон рабочих напряжений от 2.0 В до 3.6 В. Оптимизированное динамическое потребление в сочетании с полным набором режимов энергосбережения позволяет создавать приложения с низким энергопотреблением. Благодаря возможности прямого подключения батареи VBAT поддерживается питание RTC и регистров резервного копирования.
Отладочная плата предоставляет пользователю удобную возможность для проверки новых концепций и построения прототипов на основе микроконтроллера STM32G070RB.
Плата совместима с Arduino™ Uno V3 и имеет разъемы ST morpho, что позволяет легко расширить функциональность открытой платформы разработки STM32 Nucleo-64 с использованием широкого набора специализированных плат.
На плате NUCLEO-G070RB имеется встроенный программатор/отладчик ST-Link/V1-2.
Изделие поставляется с комплексной STM32 библиотекой вместе с различными примерами программ в MCU пакете STM32 Cube.
До подключения платы к ПК необходимо инсталлировать драйвер для ST-Link/V1-2, который можно скачать с сайта www.st.com.
Рис. 1. Отладочная плата NUCLEO-G070RB
Рис. 2. Структурная схема отладочной платы NUCLEO-G070RB
Рис. 3. Структурная схема микроконтроллера STM32G070RB
Отличительные особенности:
- Микроконтроллер STM32G070RB в корпусе LQFP64
- Один общий с Arduino™ пользовательский светодиод
- Одна пользовательская кнопка и одна кнопка сброса
- Кварцевый генератор 768 кГц
- Разъемы расширения платы:
- Arduino™ Uno V3
- STmorphoразъемы для полного доступа к I/OSTM32
- Гибкие возможности питания:
- Через ST-LINK, USBVBUSили от внешних источников (3.3 В, 5 В, 7 В — 12 В)
- Встроенный программатор/отладчик ST-LINK/V2-1 с USBренумерацией
- Устройство хранения
- Виртуальный COM порт
- Порт отладки
- Комплексная бесплатная программная библиотека и примеры доступны в MCU пакете STM32Cube
- Поддержка широкого выбора интегрированных средств разработки (IDE), включая IAR, Keil и IDE, основанных на GCC
Страница изделия на сайте производителя.
Архитектура 8-разрядного микроконтроллера — PDF Free Download
Лекция 5. Центральный микропроцессор
Лекция 5 Центральный микропроцессор Архитектура ПЛК 2 Под архитектурой микроконтроллера понимают комплекс его аппаратных и программных средств, предоставляемых пользователю. Основные модули ПЛК: центральный
ПодробнееПрограммируемый таймер КР580ВИ53
Программируемый таймер КР580ВИ53 (Отечественный аналог Intel i8253) Управление периферийными устройствами часто требует от микропроцессорной системы точного задания временных интервалов между управляющими
ПодробнееМикроконтроллер 1880ВE81У
Микроконтроллер 1880ВE81У Восьмиразрядная однокристальная ЭВМ с памятью команд (ПЗУ), памятью данных (ОЗУ) и блоком контроллера мультиплексного канала связи по ГОСТ Р 52070-2003. КМОП БИС микроконтроллера
ПодробнееРис Схема включения процессора.
2.Организация обмена информацией: Функции устройств магистрали 2.4. Функции устройств магистрали Рассмотрим теперь, как взаимодействуют на магистрали основные устройства микропроцессорной системы: процессор,
ПодробнееМИКРОПРОЦЕССОРЫ И МПС
Федеральное агентство по образованию ГОУ ВПО «Уральский государственный технический университет УПИ» В.П. Мокрецов МИКРОПРОЦЕССОРЫ И МПС Часть 2 Микроконтроллеры Учебное электронное текстовое издание Научный
ПодробнееКМ1801ВМ3А, КМ1801ВМ3Б, КМ1801ВМ3В
КМ1801ВМ3А, КМ1801ВМ3Б, КМ1801ВМ3В Микросхема КМ1801ВМ3 16-разрядный однокристальный микропроцессор, включающий операционный блок, блок микропрограммного управления, блок прерываний, диспетчер памяти и
ПодробнееОсновные функции микропроцессора :
Архитектура МП Основные понятия Микропроцессор — это программно-управляемое устройство, предназначенное для обработки цифровой информации и управления процессами этой обработки, выполненной в виде одной
ПодробнееПроектирование микропроцессора на ПЛИС
Проектирование микропроцессора на ПЛИС Оглавление Введение… 1 Система команд… 1 Классификация команд… 2 Структура команды… 2 Структура процессора… 3 Функционирование процессора… 7 Типы управления…
ПодробнееПринципы построения процессора
1. ВВЕДЕНИЕ Базовая структура микропроцессорной системы Обобщенная структурная схема микропроцессорного устройства (МПУ) изображена на рис. 1.1. В общем случае, работа МПУ сводится к следующей последовательности
ПодробнееАРХИТЕКТУРА МИКРОКОНТРОЛЛЕРА INEL 8051
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ А. Г. Горюнов, С. Н. Ливенцов АРХИТЕКТУРА МИКРОКОНТРОЛЛЕРА
ПодробнееРис Структура модуля памяти.
2.4.2. Функции памяти Память микропроцессорной системы выполняет функцию временного или постоянного хранения данных и команд. Объем памяти определяет допустимую сложность выполняемых системой алгоритмов,
ПодробнееАРХИТЕКТУРА МИКРОКОНТРОЛЛЕРА С8051 (SILABS)
КАЗАНСКИЙ (ПРИВОЛЖСКИЙ) ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ ИНСТИТУТ ФИЗИКИ Кафедра радиоастрономии Ю.М.Стенин, В.Ю.Теплов АРХИТЕКТУРА МИКРОКОНТРОЛЛЕРА С8051 (SILABS) Учебно-методическое пособие Казань 2012 УДК 681.322
Подробнее(ТУ — ИРВЖ )
1 ТО БИС Н1582ВЖ3В-0244 «Оконечное устройство мультиплексного канала по ГОСТ Р 52070» (редакция 12.01.15) (ТУ — ИРВЖ.431262.030-023) Данный документ предполагает детальное знакомство потребителя с ГОСТ
ПодробнееОсновные параметры Значение Единица
64-60/+85 НИИЭТ 16 разрядный микроконтроллер с масочным ПЗУ Корпус 6108.68-1 Предназначен для применения во встроенных системах управления и обработки информации Тактовая частота 20 МГц (группа ВЕ36А 12
ПодробнееК572ПВЗ, КН572ПВЗ, КР572ПВЗ
К572ПВЗ, КН572ПВЗ, КР572ПВЗ Микросхемы представляют собой 8-разрядный АЦП последовательного приближения, сопрягаемый с микропроцессором. Связь с микропроцессорами осуществляется в режиме записи и преобразования
ПодробнееРисунок 3.1 Структура модуля памяти
ЛЕКЦИЯ 4-5. Тема: «Структура и функционирование памяти и устройств ввода-вывода вычислительных систем» 3.1 Функции памяти. Память микропроцессорной системы выполняет функцию временного или постоянного
ПодробнееОГЛАВЛЕНИЕ ПРЕДИСЛОВИЕ…7
ОГЛАВЛЕНИЕ ПРЕДИСЛОВИЕ………………………………………………7 ГЛАВА 1. ЗНАКОМСТВО С СЕМЕЙСТВОМ CLASSIC…………………9 1.1. ОБЩИЕ СВЕДЕНИЯ………………………………………9
ПодробнееОсновные параметры Значение Единица
-/+8 НИИЭТ разрядный микроконтроллер с масочным ПЗУ 8ВЕ, А Корпус.88- Предназначен для применения во встроенных системах управления и обработки информации Тактовая частота МГц (группа ВЕА МГц) Регистровое
ПодробнееТСКЯ ТСКЯ И. Содержание. Лит
Справка Перв. Примен. ТСКЯ.431295.006 Изм Разраб. Усков Пров. Шумилин Гл.констр Какоулин Н.Контр. Ануфриева Утв.. Какоулин Содержание 1 Подключение микроконтроллера.. 2 2 Перевод микроконтроллера в режим
ПодробнееПроект ТО микросхемы Н1582ВЖ3Б-0257
Проект ТО микросхемы Н1582ВЖ3Б-0257 С О Д Е Р Ж А Н И Е 1. Введение 2. Назначение 3. Технические данные 4. Описание выводов 5. Структурная схема БИС 6. Функционирование БИС Приложение — Схема включения.
ПодробнееЛабораторная работа 1
Лабораторная работа 1 «Исследование подсистемы памяти ЭВМ» Цель работы: Изучение иерархии, назначения и типов памяти ЭВМ. Исследование интерфейсов типовых запоминающих устройств. Задачи: 1. Изучение классификации
ПодробнееСистема управления вводом-выводом
Система управления вводом-выводом Виды работ вычислительной системы Обработка информации Операции по осуществлению ввода-вывода информации Общие сведения об архитектуре компьютера. Шины Шины данных Адресные
ПодробнееМИКРОТРЕНАЖЕР МТ1804
МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ (ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ) А.В.Бруханский МИКРОТРЕНАЖЕР МТ1804 Учебное пособие к лабораторной работе МОСКВА 2002 Цель работы ознакомление с архитектурой микропрограммируемых
ПодробнееМИКРОКОНТРОЛЛЕРЫ СЕМЕЙСТВА MCS-51
МИКРОКОНТРОЛЛЕРЫ СЕМЕЙСТВА MCS-51 1.ОБЩИЕ ОСОБЕННОСТИ УПРАВЛЯЮЩИХ МИКРОКОНТРОЛЛЕРОВ… 5 1.1.Четырехразрядные микроконтроллеры…. 5 2.УПРАВЛЯЮЩИЕ ВОСЬМИРАЗРЯДНЫЕ МИКРОКОНТРОЛЛЕРЫ СЕМЕЙСТВА MCS- 51 ФИРМЫ
Подробнее1. Фон-неймановские принципы
1. Фон-неймановские принципы Наличие каких компонентов компьютера следует из формулы ? Оперативная память Процессор Анализ структуры двоичного кода содержимого ячейки
ПодробнееОСНОВЫ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ
book-3 11/27/08 1:15 PM Page 1 Основы информационных технологий Ю.В. Новиков П.К. Скоробогатов ОСНОВЫ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ Учебное пособие 4-е издание, исправленное Интернет-Университет Информационных
ПодробнееРоссийская академия наук
Российская академия наук Федеральное государственное унитарное предприятие ЭКСПЕРИМЕНТАЛЬНЫЙ ЗАВОД НАУЧНОГО ПРИБОРОСТРОЕНИЯ со Специальным конструкторским бюро ПЛАТА-МЕЗОНИН ИЗМЕРИТЕЛЯ ЧАСТОТЫ 98153 СОДЕРЖАНИЕ
ПодробнееБИС КР145ИК1901, К145ИК1901
БИС КР145ИК1901, К145ИК1901 Данная техническая спецификация является ознакомительной и не может заменить собой учтенный экземпляр технических условий или этикетку на изделие. Микроконтроллер БИС К145ИК1901
ПодробнееСистема команд модуля «M-DMX»
Система команд модуля «M-DMX» 2014 1 Оглавление Общее описание… 3 Протокол MODBUS… 3 Адресация MODBUS… 3 Регистры хранения… 4 Стартовый кадр… 8 2 Общее описание Модули «M-DMX» подключаются в
Подробнее(ТУ — ИРВЖ )
1 ТО БИС Н1582ВЖ3В-0244 «Оконечное устройство мультиплексного канала по ГОСТ Р 52070» (редакция 26.09.12) (ТУ — ИРВЖ.431262.030-023) На текущий момент доступны серийные микросхемы с пр. 5. По желанию потребителей
Подробнее Архитектура, блок-схема и приложения
Архитектура микроконтроллера 8051
Микроконтроллер 8051 является одним из основных типов микроконтроллеров, разработанных Intel в 1980-х годах. Этот микроконтроллер был основан на Гарвардской архитектуре и разработан в первую очередь для использования во встроенных системах. Обычно этот микроконтроллер был разработан с использованием технологии NMOS, которая требует большей мощности для работы. Поэтому Intel переработала микроконтроллер 8051 с использованием технологии CMOS, и в их обновленных версиях в названии была буква C, например, 80C51 — это 8-битный микроконтроллер.Эти последние микроконтроллеры требуют меньше энергии для работы по сравнению с их предыдущими версиями. Микроконтроллер 8051 имеет две шины и две области памяти размером 64K X 8 для программ и блоков данных. Он имеет 8-битный процессор и 8-битный накопитель.
Архитектура микроконтроллера 8051
На следующей диаграмме представлена архитектура микроконтроллера 8051. Давайте посмотрим на каждую часть или блок этой Архитектуры микроконтроллера.
8051 Архитектура микроконтроллера
Центральный процессор (ЦП)
Как мы знаем, ЦП — это мозг любого устройства обработки микроконтроллера.Он отслеживает и контролирует все операции, выполняемые на микроконтроллерах. Пользователь не может напрямую контролировать работу ЦП. Он читает программы, записанные в ПЗУ, выполняет их и выполняет ожидаемую задачу этого приложения.
Прерывания
Как следует из названия, прерывание — это вызов подпрограммы, которая прерывает основные операции или работу микроконтроллера и заставляет его выполнять любую другую программу, что более важно во время работы.Функция прерывания очень полезна, так как помогает в экстренных случаях. Прерывания дают нам механизм, позволяющий приостановить текущие операции, выполнить подпрограмму и затем снова вернуться к другому типу операций.
Микроконтроллер 8051 может быть настроен таким образом, что он временно завершает или приостанавливает выполнение основной программы при возникновении прерывания. Когда подпрограмма завершена, начинается выполнение основной программы. Обычно в микроконтроллере 8051 имеется пять источников прерываний.Ниже показано 5 векторных прерываний.
Из них (INT0) ̅ и (INT1) ̅ — внешние прерывания, которые могут быть вызваны отрицательным фронтом или низким уровнем. Когда все эти прерывания активированы, установите соответствующие блоки, за исключением последовательного прерывания,. Флаги прерывания сбрасываются, когда процессор переходит к подпрограмме обслуживания прерывания (ISR). Флаги внешнего прерывания сбрасываются, когда процессор переходит к программе обслуживания прерывания, при условии, что прерывание запускается по отрицательному фронту, тогда как таймеры и прерывания последовательного порта: два из них — внешние прерывания, два из них — прерывания по таймеру и один терминал прерывания последовательного порта. В основном.
Память
Для микроконтроллера требуется программа, которая представляет собой набор инструкций. Эта программа сообщает микроконтроллеру о выполнении определенных задач. Этим программам требуется память, в которой они могут быть сохранены и прочитаны микроконтроллером для выполнения определенных операций конкретной задачи. Память, которая используется для хранения программы микроконтроллера, известна как память кода или память программ приложений. Это известно как ПЗУ микроконтроллера, также требуется память для временного хранения данных или операндов микроконтроллера.Память данных 8051 используется для временного хранения данных для работы, известной как оперативная память. Микроконтроллер 8051 имеет 4 КБ памяти для кодов или программ, ПЗУ на 4 КБ, а также 128 байт ОЗУ для данных.
Шина
В основном шина — это набор проводов, которые работают как канал связи или среда для передачи данных. Эти шины состоят из 8, 16 и более проводов микроконтроллера. Таким образом, они могут нести 8 бит, 16 бит одновременно. Возьмите в аренду два типа шин, которые показаны ниже:
Адресная шина : Микроконтроллер 8051 имеет 16-битную адресную шину для передачи данных.Он используется для адресации ячеек памяти и для передачи адреса из ЦП в память микроконтроллера. Он имеет четыре режима адресации:
- Режимы немедленной адресации.
- Адрес банка (или) Режим адресации регистра.
- Режим прямой адресации.
- Регистр режима косвенной адресации.
Шина данных : Микроконтроллер 8051 имеет 8 бит шины данных, которая используется для передачи данных определенных приложений.
Осциллятор
Как правило, мы знаем, что микроконтроллер — это устройство, поэтому ему требуются тактовые импульсы для работы приложений микроконтроллера.Для этой цели микроконтроллер 8051 имеет встроенный генератор, который работает как источник синхронизации для центрального процессора микроконтроллера. Выходные импульсы генератора стабильны. Следовательно, он обеспечивает синхронизированную работу всех частей микроконтроллера 8051.
Порт ввода / вывода
Обычно микроконтроллер используется во встроенных системах для управления работой машин в микроконтроллере. Поэтому для подключения его к другим машинам, устройствам или периферийным устройствам нам потребуются порты интерфейса ввода-вывода в интерфейсе микроконтроллера.Для этого микроконтроллер 8051 имеет 4 порта входа и выхода для подключения к другим периферийным устройствам.
Таймеры / счетчики
Микроконтроллер 8051 имеет два 16-битных таймера и счетчика. Эти счетчики снова разделены на 8-битный регистр. Таймеры используются для измерения интервалов для определения ширины импульсов.
Приложения микроконтроллера 8051
Некоторые из приложений 8051 в основном используются в повседневной жизни и в промышленности, также некоторые из этих приложений показаны ниже
- Светочувствительные и управляющие устройства
- Устройства измерения и управления температурой
- Обнаружение пожара и устройства безопасности
- Автомобильные приложения
- Оборонные приложения
Некоторые промышленные приложения микроконтроллера и его приложений
- Промышленные контрольно-измерительные приборы
- Устройства управления процессом
Некоторые из 8051 микроконтроллеров используются в измерительных приложениях
- Приложения вольтметра
- Измерительные и вращающиеся объекты
- Объекты измерителя тока
- Ручная измерительная система
8051 Приложения микроконтроллера во встроенных системах
Приложения микроконтроллера 8051 i nvolves в 8051 проектах.Список из 8051 проекта приведен ниже.
- Управляемый Arduino высокочувствительный энергосберегающий режим на основе LDR для системы управления уличным освещением
- Система контроля температуры и влажности почвы на основе беспроводных сенсорных сетей с использованием Arduino
- Система электронного паспорта на основе RFID для легкого управления с использованием Arduino
- RFID с датчиком на основе Arduino Доступ к устройству
- Управление скоростью двигателя постоянного тока на базе Arduino
- Линия на основе Arduino, следующая за роботом
- Система автоматического считывания показаний счетчика на основе Zigbee
- Выставление счетов за счетчик электроэнергии на базе GSM с локальным дисплеем
- Распознавание речи телефона на Android с распознаванием голосовых команд Дисплей доски объявлений
- Система индикации наличия парковки
- Бытовая техника с голосовым управлением
- Бытовая техника с дистанционным управлением
- Управление электрической нагрузкой на ПК с помощью мыши с помощью приложения VB
- Солнечная система освещения шоссе с автоматическим выключением в дневное время
- 8051 Microcontro Беспроводной измеритель энергии на основе ller
- Удобный для фермеров электрический забор на основе солнечной энергии для отпугивания скота
- Уличный свет с датчиком движения автомобиля и дневным автоматическим выключением Функции
Пожалуйста, перейдите по этой ссылке, чтобы узнать больше о MCQ архитектуры ARM и MCQ
У вас есть есть ли новаторские идеи по реализации проектов электроники на базе микроконтроллера 8051? Затем не стесняйтесь поделиться своими идеями по получению решений для вашего проекта от нас и других читателей, разместив их в разделе комментариев ниже.
Основы микроконтроллеров — структура, приложения, плюсы и минусы
Что такое микроконтроллер?
PS: Этот пост является продолжением поста ВВЕДЕНИЕ В PIC .
Микроконтроллер — это однокристальный микрокомпьютер, изготовленный на базе СБИС. Микроконтроллер также называется встроенным контроллером, потому что микроконтроллер и его вспомогательные схемы часто встроены или встроены в устройства, которыми они управляют. Доступны микроконтроллеры с разной длиной слова, такие как микропроцессоры (сегодня доступны 4-битные, 8-битные, 16-битные, 32-битные, 64-битные и 128-битные микроконтроллеры).
Микроконтроллер Чип
1) Микроконтроллер в основном содержит один или несколько следующих компонентов:
- Центральный процессор (ЦП)
- Оперативная память) (RAM)
- Постоянное запоминающее устройство (ПЗУ)
- Порты ввода / вывода
- Таймеры и счетчики
- Управление прерываниями
- Аналого-цифровые преобразователи
- Цифровые аналоговые преобразователи
- Последовательные порты интерфейса
- Цепи колебательные
2) Внутренний микроконтроллер состоит из всех функций, необходимых для вычислительной системы, и функционирует как компьютер без добавления в него каких-либо внешних цифровых частей.
3) Большинство контактов микросхемы микроконтроллера могут быть сделаны программируемыми пользователем.
4) Микроконтроллер имеет множество инструкций обработки битов, которые могут быть легко поняты программистом.
5) Микроконтроллер может обрабатывать логические функции.
6) Более высокая скорость и производительность.
7) Встроенная в микроконтроллер структура ПЗУ обеспечивает лучшую защиту микропрограмм.
8) Простота проектирования при низкой стоимости и небольшом размере.
Структура микроконтроллера
Базовая структура и структурная схема микроконтроллера показаны на рисунке (1.1).
Структура микроконтроллераИзображение взято из
CPU — это мозг микроконтроллера. ЦП отвечает за выборку инструкции, ее декодирование и, наконец, выполнение. ЦП объединяет каждую часть микроконтроллера в единую систему. Основная функция ЦП — выборка и декодирование инструкций. Команда, полученная из памяти программы, должна быть декодирована ЦП.
Функция памяти в микроконтроллере такая же, как и в микропроцессоре. Он используется для хранения данных и программ. Микроконтроллер обычно имеет определенный объем ОЗУ и ПЗУ (EEPROM, EPROM и т. Д.) Или флэш-памяти для хранения исходных кодов программ.
-
Параллельные порты ввода / вывода
Параллельные порты ввода / вывода в основном используются для подключения различных устройств, таких как ЖК-дисплеи, светодиоды, принтеры, памяти и т. Д., К микроконтроллеру.
Последовательные порты обеспечивают различные последовательные интерфейсы между микроконтроллером и другими периферийными устройствами, такими как параллельные порты.
Это одна из полезных функций микроконтроллера. Микроконтроллер может иметь более одного таймера и счетчиков. Таймеры и счетчики обеспечивают все функции отсчета времени и счета внутри микроконтроллера. Основными операциями этого раздела являются функции часов, модуляция, генерация импульсов, измерение частоты, создание колебаний и т. Д.Это также можно использовать для подсчета внешних импульсов.
-
Аналого-цифровой преобразователь (АЦП)
Преобразователи АЦП используются для преобразования аналогового сигнала в цифровую форму. Входной сигнал в этом преобразователе должен быть в аналоговой форме (например, выход датчика), а выход этого устройства — в цифровой форме. Цифровой выход может использоваться для различных цифровых приложений (например, для измерительных устройств).
-
Цифро-аналоговый преобразователь (ЦАП)
ЦАП выполняет операцию обратного преобразования АЦП.ЦАП преобразует цифровой сигнал в аналоговый формат. Обычно используется для управления аналоговыми устройствами, такими как двигатели постоянного тока, различные приводы и т. Д.
Управление прерыванием, используемое для обеспечения прерывания (задержки) для рабочей программы. Прерывание может быть внешним (активируется с помощью вывода прерывания) или внутренним (с помощью команды прерывания во время программирования).
-
Блок специального функционирования
Некоторые микроконтроллеры используются только для некоторых специальных приложений (например,грамм. космические системы и робототехника) эти контроллеры, содержащие дополнительные порты для выполнения таких специальных операций. Это считается специальным функциональным блоком.
Сравнение микропроцессора и микроконтроллера
Основное сравнение микропроцессора и микроконтроллера, показанное на рис. (1.2)
Сравнение микропроцессора и микроконтроллераИсточник изображения
| Микропроцессоры Микроконтроллеры | ||
| 1 | Это только универсальный компьютер с процессором | Сам микрокомпьютер |
| 2 | Память, порты ввода / вывода, таймеры, прерывания недоступны внутри микросхемы | Все интегрированы внутри микросхемы микроконтроллера |
| 3 | Это должно иметь много дополнительных цифровых компонентов для выполнения своей работы | Может работать как микрокомпьютер без каких-либо дополнительных компонентов. |
| 4 | Системы становятся более громоздкими и дорогими. | Сделайте систему простой, экономичной и компактной |
| 5 | Не поддерживает логические функции | Обработка логических функций |
| 6 | Требуется большее время доступа | Низкое время доступа |
| 7 | Очень мало программируемых контактов | Большинство контактов программируются |
| 8 | Очень мало инструкций по обработке битов | Множество инструкций по обработке битов |
| 9 | Широко используется в современных ПК и ноутбуках | широко в небольших системах управления |
| E.грамм. | INTEL 8086, INTEL Pentium серии | INTEL8051,89960, PIC16F877 |
Преимущества микроконтроллеров
Приведены основные преимущества микроконтроллеров.
a) Микроконтроллеры действуют как микрокомпьютер без каких-либо цифровых компонентов.
b) Поскольку более высокая степень интеграции внутри микроконтроллера снижает стоимость и размер системы.
c) Использование микроконтроллера простое, легко устраняет и обслуживает систему.
d) Большинство контактов программируются пользователем для выполнения различных функций.
e) Простое сопряжение с дополнительной RAM, ROM, портами ввода / вывода.
е) Низкое время, необходимое для выполнения операций.
Недостатки микроконтроллеров
a) Микроконтроллеры имеют более сложную архитектуру, чем микропроцессоры.
б) Выполнять одновременно ограниченное количество выполнений.
c) В основном используется в микрооборудовании.
d) Невозможно напрямую связать устройства большой мощности.
Приложения
В наши дни микроконтроллеры можно встретить во всех видах электронных устройств. Любое устройство, которое измеряет, хранит, контролирует, вычисляет или отображает информацию, должно иметь внутри микроконтроллер. Наиболее широко микроконтроллеры используются в автомобильной промышленности (микроконтроллеры широко используются для управления двигателями и регуляторами мощности в автомобилях).Вы также можете найти микроконтроллеры внутри клавиатур, мышей, модемов, принтеров и других периферийных устройств. В испытательном оборудовании микроконтроллеры упрощают добавление таких функций, как возможность сохранять измерения, создавать и сохранять пользовательские процедуры, а также отображать сообщения и формы сигналов. Потребительские продукты, в которых используются микроконтроллеры, включают цифровые видеокамеры, оптические проигрыватели, ЖК / светодиодные дисплеи и т. Д. И это лишь несколько примеров.
Некоторые основные применения микроконтроллера приведены ниже.
а) Используется в биомедицинских инструментах.
б) Широко используется в системах связи.
c) Используется как периферийный контроллер в ПК.
г) Используется в робототехнике.
д) Используется в автомобильных областях.
Статей Рекомендуем прочитать:
1. Базовый ПИК
2. ВВЕДЕНИЕ В PIC 167F877
3. PIC 16F877 — АРХИТЕКТУРА И ОРГАНИЗАЦИЯ ПАМЯТИ
4.РЕГИСТРАЦИЯ ОРГАНИЗАЦИИ ПАМЯТИ НА ПИК 16F877
8051 Внутренняя АРХИТЕКТУРА и блок-схема микроконтроллера с приложениями
Главная »Блог» Внутренняя АРХИТЕКТУРА и блок-схема микроконтроллера 8051 с приложениями
В 1981 году Intel представила 8-битный микроконтроллер под названием 8051 . Это один из основных типов микроконтроллеров, основанных на Гарвардской архитектуре и разработанных в основном для использования во встроенных системах.По сути, микроконтроллер 8051 был разработан с использованием технологии HMOS, для работы которой требовалось больше энергии. Поэтому Intel переработала микроконтроллер 8051 с использованием технологии CMOS, и их обновленные версии — 80C51, для работы потребовалось меньше энергии.
Характеристики микроконтроллера 8051
- Он имеет 8-битный процессор.
- Он построен с 40-контактной микросхемой DIP (двухрядный корпус).
- Встроенная память программ (ROM) 4 КБ байтов
- Встроенная память данных (RAM) 128 байтов
- Четыре банка регистров (банк 0 — банк 3)
- 128 пользовательских программных флагов
- 8-битные двунаправленные данные шина
- 16-битная однонаправленная адресная шина
- 32 регистра общего назначения, каждый из 8-битных
- 2- 16-битный таймер / счетчик (таймер 0 и таймер 1).
- Три внутренних и два внешних прерывания.
- 32 линии двунаправленного ввода / вывода, организованные как четыре 8-битных порта (порт 0 — порт 3).
- 16-битный счетчик программ и указатель данных.
- Встроенный кварцевый генератор интегрирован в микроконтроллер с тактовой частотой 12 МГц.
- Прямая битовая и байтовая адресация.
- 8051 также имеют ряд специальных функций, таких как UART, АЦП, операционный усилитель и т. Д.
Внутренняя архитектура микроконтроллера 8051
Теперь обсудим внутреннюю архитектуру и каждый функциональный блок микроконтроллера 8051.
Архитектура микроконтроллера 8051ЦП (центральный процессор)
мы знаем, что центральный процессор является основным компонентом любого процессора, его также называют сердцем процессора. Он контролирует и управляет всеми процессами, которые выполняются в блоке микроконтроллера. Он также взаимодействует с периферийными устройствами, такими как память, ввод и вывод. ЦП содержит арифметико-логический блок (ALU), блок управления (CU) и некоторые резисторы.
Центральный процессор микроконтроллераАрифметико-логический блок (ALU) выполняет арифметические и логические операции.Он также манипулирует данными. Отдельный бит регистра может быть установлен, сброшен, очищен, дополнен, протестирован и использован в логических вычислениях. Блок управления (CU) отвечает за синхронизацию процесса связи между ЦП и его периферийными устройствами.
Память
Для выполнения какой-либо конкретной задачи микроконтроллеру требуется группа инструкций, которая называется программой. Таким образом, для хранения этих программ микроконтроллер имеет память, называемую памятью программ или памятью кода. I n ПЗУ микроконтроллера (постоянное запоминающее устройство) используется в качестве памяти программ для хранения программ или инструкций.Программная память обычно состоит из EEPROM (электрически стираемая программируемая постоянная память), которая представляет собой тип энергонезависимой памяти. В этом типе памяти данные можно стирать и перепрограммировать с помощью специальных программных сигналов.
Для хранения данных микроконтроллер имеет специальную память, называемую памятью данных. Микроконтроллер использовал RAM (оперативную память) для временного хранения данных и вспомогательных результатов, сгенерированных во время выполнения. RAM — это энергозависимая память, поскольку отключение питания IC приведет к потере информации или данных.
В микроконтроллере 8051 имеется память для кода или программ размером 4 КБ, то есть в нем 4 КБ ПЗУ, а также память данных (ОЗУ) на 128 байт.
Автобус
Группа проводов называется ШИНА. который используется как канал связи или действует как средство передачи данных. Шина микроконтроллера состоит из 8, 16 и более проводов. Таким образом, они могут нести 8 бит, 16 бит одновременно.
В микроконтроллере 8051 используются шины двух типов:
- Адресная шина : микроконтроллеры 8051 имеют 16-битную адресную шину.Он используется для передачи данных из ЦП (центрального процессора) в память.
- Шина данных : микроконтроллер 8051 имеет 8-битную шину данных. Он используется для передачи данных с одних периферийных устройств на другие периферийные устройства.
Порты ввода и вывода
8051 имеет четыре важных порта: порт 0, порт 1, порт 2 и порт 3. Эти порты позволяют микроконтроллеру подключаться к внешним устройствам, машинам или другим периферийным устройствам. Каждый порт имеет 8 контактов.Таким образом, четыре порта вместе содержат 32 контакта. Все порты двунаправленные. У каждого порта есть защелка и драйвер (или буфер). При использовании внешней памяти линии порта 0 будут функционировать как мультиплексированные линии адреса / данных младшего байта, а линии порта 2 будут функционировать как строки адреса старшего байта.
Таймеры / счетчики
8051 имеет два 16-битных программируемых таймера / счетчика (Таймер 0 — Таймер 1). Который может использоваться либо как таймер для генерации временной задержки, либо как счетчик для подсчета событий, происходящих вне микроконтроллера.
Осциллятор
Микроконтроллер — цифровое устройство, поэтому для его работы требуются тактовые импульсы. Для синхронизации всех частей микроконтроллера и выполнения операций микроконтроллер имеет встроенный генератор, который работает как источник синхронизации для центрального процессора микроконтроллера.
Прерывания
Прерывания — это события, которые временно приостанавливают выполнение основной программы микроконтроллером.Информируйте микроконтроллер, отправив ему сигнал прерывания (сообщите микроконтроллеру, что устройству требуется его обслуживание). Когда микроконтроллер получает сигнал прерывания, микроконтроллер прерывает все, что он делает, и обслуживает устройство. После этого микроконтроллер возобновит выполнение основной программы.
Программа, связанная с прерыванием, называется ISR (Interrupt Service Routine) или обработчиком прерывания. ISR — это набор инструкций, выполняемых для предоставления услуги прерванному устройству.Для каждого прерывания существует фиксированная ячейка памяти, в которой хранится адрес его ISR. Группа ячеек памяти, выделенная для хранения адреса ISR, называется таблицей векторов прерываний.
В 8051 есть 5 типов прерываний:
- Прерывание переполнения таймера 0- TF0
- Прерывание переполнения таймера 1- TF1
- Внешнее аппаратное прерывание- INT0
- Внешнее аппаратное прерывание- INT1
- Прерывание последовательной связи- RI / TI
Приложения микроконтроллера 8051
В настоящее время микроконтроллеры находят широкое применение в различных областях.8051 в основном используется в повседневной жизни, промышленности, медицине, автомобилестроении, обороне и т. Д.
- Устройства измерения и контроля температуры
- Устройства измерения и контроля света
- Применение в автомобилях
- Устройства обнаружения пожара и безопасности
- Приложения для обороны
- Промышленные контрольно-измерительные приборы
- Устройства управления технологическим процессом
- Объекты измерения и вращения
- Объекты измерения тока
- Робототехника
- Мониторы глюкозы и артериального давления
8051 Архитектура микроконтроллера — javatpoint
Давайте посмотрим на внутреннюю архитектуру микроконтроллера 8051, представленную в виде блок-схемы, как показано ниже:
Основные компоненты, присутствующие внутри архитектуры микроконтроллера 8051:
ЦП (центральный процессор) : ЦП действует как разум любой обрабатывающей машины.Он синхронизирует и управляет всеми процессами, которые выполняются в микроконтроллере. Пользователь не имеет права контролировать работу процессора. Он интерпретирует программу, хранящуюся в ПЗУ, и выполняет ее из хранилища, а затем выполняет запланированные функции. ЦП управляет различными типами регистров, доступными в микроконтроллере 8051.
Прерывания : прерывания — это вызов подпрограммы, который выдается микроконтроллером, когда какая-либо другая программа с высоким приоритетом запрашивает получение системных шин, в текущей выполняющейся программе возникает n прерываний.
Прерывания позволяют отложить или задержать текущий процесс, выполнить подпрограмму и затем снова перезапустить стандартную программу.
Типы прерываний в микроконтроллере 8051:
Давайте посмотрим на пять источников прерываний в микроконтроллере 8051:
- Таймер 0, прерывание переполнения — TF0
- Таймер 1, прерывание переполнения — TF1
- Внешнее аппаратное прерывание — INT0
- Внешнее аппаратное прерывание — INT1
- Прерывание последовательной связи — RI / TI
Память : Для работы микроконтроллеру требуется программа.Эта программа направляет микроконтроллер для выполнения конкретных задач. Эта программа, установленная в микроконтроллере, требовала некоторого количества встроенной памяти для хранения программы.
Микроконтроллерутакже требовалась память для кратковременного хранения данных и операндов. В микроконтроллере 8051 имеется кодовая или программная память объемом 4 КБ, то есть она имеет 4 КБ ПЗУ, а также состоит из памяти данных (ОЗУ) на 128 байт.
Шина : Шина — это группа проводов, которая используется как канал связи или действует как средство передачи данных.Другая конфигурация шины включает 8, 16 или более кабелей. Следовательно, шина может содержать 8 бит, всего 16 бит.
Типы шин в микроконтроллере 8051:
Давайте посмотрим на два типа шины, используемые в микроконтроллере 8051:
- Адресная шина : микроконтроллеры 8051 состоят из 16-битной адресной шины. Обычно он используется для передачи данных из центрального процессора в память.
- Шина данных : микроконтроллер 8051 состоит из 8-битной шины данных.Обычно он используется для передачи данных с одной позиции периферийных устройств на другие периферийные устройства.
Осциллятор : Поскольку микроконтроллер представляет собой цифровую схему, ему нужен таймер для их работы. Для работы таймера внутри микроконтроллера требуется внешний или встроенный генератор. Микроконтроллер используется во встроенной системе для управления функциями устройств. Следовательно, 8051 использует два 16-битных счетчика и таймера. Для работы таймеров и счетчиков внутри микроконтроллера используется осциллятор.
8051 Микроконтроллер: блок-схема и компоненты
Дата публикации: 23 августа 2013 | Обновлено: 23 августа 2013 | Категория: Другое | Автор: M.AKSHAY | Уровень пользователя: Gold | Баллы: 70 |
Архитектура микроконтроллера 8051 описана в этом ресурсе. Объясняются структурная схема микроконтроллера 8051, компоненты и их функции.
Введение: что такое микроконтроллер?
Полная компьютерная система, изготовленная на одном кристалле, называется микроконтроллером.
Характеристики микроконтроллера аналогичны характеристикам микропроцессора, например регистры, ALU, программный счетчик, флаги, указатель стека и т. Д. Помимо этих общих функций, микроконтроллер имеет некоторые дополнительные функции, такие как схема синхронизации, внутреннее ОЗУ и т. Д. ПЗУ, счетчик последовательного и параллельного ввода / вывода.
Использование микроконтроллера дает большое преимущество, заключающееся в том, что программа хранится в ПЗУ, которая играет важную роль в управлении операциями и функциями системы. Поскольку программа, записанная в ПЗУ, является фиксированной, то есть ее нельзя изменить или изменить; в результате работа системы остается постоянной (неизменной) независимо от данных ей инструкций.Следовательно, микроконтроллер можно рассматривать как устройство, содержащее программную память на кристалле. Микроконтроллер также можно назвать «микрокомпьютером».
Теперь давайте посмотрим на архитектуру и блок-схему микроконтроллера 8051
Основные компоненты микроконтроллера Intel 8051
Микроконтроллер 8051 является 8-битным микроконтроллером. Давайте посмотрим на основные компоненты микроконтроллера 8051 и их функции.
Микроконтроллер 8051 состоит из 12 основных компонентов:
1.ALU (арифметический и логический блок)
2. ПК (счетчик программ)
3. Регистры
4. Таймеры и счетчики
5. Внутреннее ОЗУ и ПЗУ
6. Четыре порта параллельного ввода / вывода общего назначения
7. Логика управления прерываниями с пять источников прерывания
8. Последовательная передача даты
9. PSW (Слово состояния программы)
10. Указатель данных (DPTR)
11. Указатель стека (SP)
12. Шина данных и адреса.
Теперь давайте посмотрим на функции каждого из этих компонентов
1.ALU
Все арифметические и логические функции выполняются ALU.
Сложение, вычитание с переносом и умножение относятся к арифметическим операциям.
Логические операции И, ИЛИ и исключающее ИЛИ (XOR) относятся к логическим операциям.
2. Программный счетчик (ПК)
Программный счетчик — это 16-разрядный регистр, не имеющий внутреннего адреса. Основная функция программного счетчика — извлечь из памяти адрес следующей инструкции, которая должна быть выполнена. ПК хранит адрес следующей инструкции, находящейся в памяти, и при обнаружении команды он производит эту инструкцию.Таким образом, ПК увеличивает автоматически, сохраняя адрес следующей инструкции.
3. Регистры
Регистры обычно называют устройствами хранения данных. Микроконтроллер 8051 имеет 2 регистра, а именно регистр A и регистр B. Регистр A служит накопителем, а регистр B — регистром общего назначения. Эти регистры используются для хранения вывода математических и логических инструкций.
Операции сложения, вычитания, умножения и деления выполняются регистром A.Регистр B обычно не используется и появляется только тогда, когда функции умножения и деления выполняются регистром A. Регистр A также участвует в передаче данных между микроконтроллером и внешней памятью.
Микроконтроллер 8051 также имеет 7 регистров специальных функций (SFR). Это:
1. Буфер данных последовательного порта (SBUF)
2. Управление таймером / счетчиком (TCON)
3. Управление режимом таймера / счетчика (TMOD)
4. Управление последовательным портом (SCON)
5. Управление питанием ( PCON)
6.Приоритет прерывания (IP)
7. Контроль разрешения прерывания (IE)
4. Таймеры и счетчики
Синхронизация между внутренними операциями может быть достигнута с помощью тактовых схем, которые отвечают за генерацию тактовых импульсов. Во время каждого тактового импульса будет выполняться определенная операция, тем самым обеспечивая синхронизацию между операциями. Для формирования генератора нам предоставлены два контакта XTAL1 и XTAL2, которые используются для подключения резонансной сети в микроконтроллере 8051.В дополнение к этому, схема также состоит из еще четырех выводов. Это,
Внутренние операции могут быть синхронизированы с использованием тактовых схем, которые вырабатывают тактовые импульсы. С каждым тактовым импульсом будет выполняться определенная функция и, следовательно, достигается синхронизация. Есть два контакта XTAL1 и XTAL2, которые образуют схему генератора, которая подключается к резонансной сети в микроконтроллере. Схема также имеет 4 дополнительных контакта —
1. EA: внешнее разрешение
2. ALE: разрешение фиксации адреса
3.PSEN: включение хранилища программ и
4. RST: сброс.
Кристалл кварца используется для генерации периодических тактовых импульсов.
5. Внутреннее ОЗУ и ПЗУ
ПЗУ
Код памяти 4 КБ встроен в ПЗУ на кристалле в 8051. ПЗУ 8051 является энергонезависимой памятью, что означает, что его содержимое не может быть изменено и, следовательно, имеет аналогичный диапазон память данных и программ, т. е. они могут адресовать память программ, а также отдельный блок памяти данных размером 64 КБ.RAM
Микроконтроллер 8051 состоит из 128 байт внутренней RAM.Это энергозависимая память, поскольку ее содержимое будет потеряно при отключении питания. Эти 128 байтов внутреннего ОЗУ разделены на 32 рабочих регистра, которые, в свою очередь, составляют 4 банка регистров (банк 0 — банк 3), каждый из которых состоит из 8 регистров (R0 — R7). Во внутренней RAM 128 адресуемых бит.
6. Четыре порта параллельного ввода / вывода общего назначения
Микроконтроллер 8051 имеет четыре 8-битных порта ввода / вывода. Это:
ПОРТ P0: Когда нет внешней памяти, этот порт действует как порт ввода / вывода общего назначения.При наличии внешней памяти он функционирует как мультиплексированная шина адреса и данных. Он выполняет двойную роль.
ПОРТ P1: Этот порт используется для различных операций взаимодействия. Этот 8-битный порт является обычным портом ввода-вывода, т.е. он не выполняет двойных функций.
PORT P2: Подобно PORT P0, этот порт может использоваться как порт общего назначения, когда нет внешней памяти, но когда внешняя память присутствует, он работает вместе с PORT PO в качестве адресной шины. Это 8-битный порт, выполняющий двойные функции.
ПОРТ P3: ПОРТ P3 ведет себя как выделенный порт ввода-вывода
7. Управление прерываниями
Событие, которое используется для приостановки или остановки нормального выполнения программы на временный период времени для обслуживания запроса другого программное или аппаратное устройство называется прерыванием. Прерывание может быть внутренним или внешним событием, которое приостанавливает работу микроконтроллера на некоторое время и тем самым препятствует последовательному выполнению программы.
Существует два способа предоставления прерывания микроконтроллеру: один — посылать программные инструкции, а другой — посылать аппаратные сигналы.Механизм прерывания сохраняет нормальное выполнение программы в режиме «приостановки» и выполняет программу подпрограммы, а после выполнения подпрограммы возвращается к своему нормальному выполнению программы. Эта подпрограмма также называется обработчиком прерывания. Подпрограмма выполняется при наступлении определенного события.
В 8051 предусмотрено 5 источников прерываний. Это:
a) 2 внешних источника прерываний, подключенных через INT0 и INT1
b) 3 внешних источника прерываний — прерывание последовательного порта, флаг таймера 0 и флаг таймера 1.
Подключены следующие контакты:
1. ALE (Address Latch Enable) — фиксирует адресные сигналы на порте P0
2. EA (внешний адрес) — хранит 4 Кбайт программной памяти.
3. PSEN (Program Store Enable) — считывает внешнюю программную память
4. RST (Reset) — сбрасывает порты и внутренние регистры при запуске
8. Последовательная передача данных
Способ установления связи между компьютерами заключается в передаче и приеме битов данных через последовательный порт. сеть подключения.В 8051 регистр SBUF (буфер данных последовательного порта) хранит данные; регистр SCON (Serial Control) управляет передачей данных, а регистр PCON (Power Control) управляет скоростью передачи данных. Далее два контакта — RXD и TXD, устанавливают последовательную сеть.
Регистр SBUF состоит из 2 частей — одна для хранения данных, которые должны быть переданы, а другая для приема данных из внешних источников. Первая функция выполняется с помощью вывода TXD, а вторая функция выполняется с помощью вывода RXD.
Имеется 4 программируемых режима последовательной передачи данных.Это:
1. Режим последовательных данных 0 (режим регистра сдвига)
2. Режим последовательных данных 1 (стандартный UART)
3. Режим последовательных данных 2 (многопроцессорный режим)
4. Режим последовательных данных 3
9. PSW (Слово состояния программы)
Слово состояния программы или PSW — это аппаратный регистр, который представляет собой ячейку памяти, в которой хранится информация о программе, а также отслеживается состояние программы, которая выполняется в данный момент. PSW также имеет указатель, который указывает на адрес следующей инструкции, которая должна быть выполнена.Регистр PSW имеет 3 поля, а именно: поле адреса инструкции, поле кода состояния и поле состояния ошибки. Можно сказать, что PSW — это внутренний регистр, который отслеживает компьютер в каждый момент времени.
Обычно инструкция результата программы хранится в однобитовом регистре, называемом «флагом». Флаги are7 в PSW 8051. Из этих 7 флагов 4 — математические, а 3 — универсальные или пользовательские.
4 математических флага:
• Перенос (c)
• Вспомогательный перенос (AC)
• Переполнение (OV)
• Четность (P)
Три флага общего назначения или пользовательские флаги:
• FO
• GFO
• GF 1
10.Указатель данных (DPTR)
Указатель данных или DPTR — это 16-разрядный регистр. Он состоит из двух 8-битных регистров, называемых DPH и DPL. Каждому из DPH и DPL назначаются отдельные адреса. Эти 8-битные регистры используются для хранения адресов памяти, которые могут использоваться для доступа к внутренним и внешним данным / коду.
11. Указатель стека (SP)
Указатель стека (SP) в 8051 является 8-битным регистром. Основное назначение SP — доступ к стеку. Поскольку он имеет 8 бит, он может принимать значения в диапазоне от 00 H до FF H.Стек — это особая область данных в памяти. SP действует как указатель на адрес, указывающий на вершину стека.
12. Шина данных и адреса
Шина — это группа проводов, по которой происходит передача данных из одного места в другое в системе. Шины сокращают количество путей или кабелей, необходимых для установления соединения между компонентами.
Существует два основных типа шин — шина данных и шина адреса.
Шина данных: шина данных предназначена для передачи данных. Он действует как электронный канал, по которому передаются данные.Чем шире ширина шины, тем больше будет передача данных.
Адресная шина: Адресная шина предназначена для передачи информации, но не данных. Информация указывает, откуда в компонентах данные должны быть отправлены или получены. Емкость или память адресной шины зависит от количества проводов, по которым передается один бит адреса.
Прочтите Минимальные требования к оборудованию для Windows 10
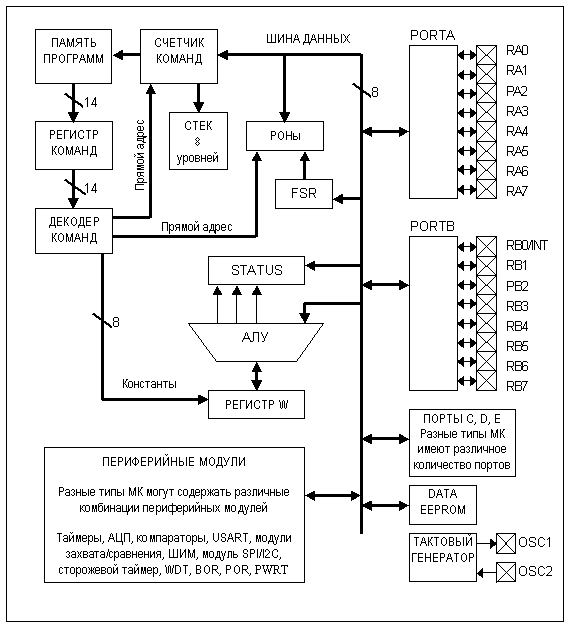
pic — Как понять структурную схему микроконтроллера Архитектура
Если бы я был новичком, пытающимся понять, как работает микроконтроллер, я бы действительно не начал с чего-то настолько сложного.Во-первых, блок-схема — это не принципиальная схема . Он не показывает, как одна часть соединяется с другой, он идентифицирует блоки подсистем внутри микросхемы и то, как данные передаются между ними.
Рассмотрим внутренние функциональные блоки значительно упрощенной (минимальной) системы.
В основе микроконтроллера лежит ядро (Центральный процессор ) — («инструкция / декодирование / управление», «Управляющий сигнал конечного автомата »). Оно функционирует, интерпретируя запросы и выполняя последовательность операций (фактический «мозг ‘контроллера)
Помимо питания (которое не показано на этих блок-схемах), существует три набора соединений (шин) между различными частями:
Адресные строки
Строки данных
Управляющие линии (чтение, запись, включение и т. Д.к защелкам, декодерам, мультиплексорам и т. д.)
Они показаны на схеме в вопросе в виде серых толстых линий со стрелками, указывающими направление. Ширина этих соединений (количество отдельных «проводов») может варьироваться. Некоторые из них имеют ширину 16 бит, другие 8 бит и т. Д.
Рассмотрим, как контроллер PIC выполняет программу.
Программа должна быть сначала сохранена в программной памяти (флэш-ОЗУ). Начиная с адреса 0004. (В случае PIC он использует первые адреса для прерываний) При «включении» ЦП устанавливает счетчик адресов на 0004 и «считывает» содержимое программной памяти.Затем он решает, является ли это исполняемой инструкцией и является ли она однобайтной или многобайтовой. Допустим, это единичная инструкция.
Сигнал ЧАСОВ используется для перехода ЦПУ к следующему шагу. Затем ЦП выполняет инструкцию. (скажем, очистите бит прерывания)
Для этого ЦП должен обратиться к регистру флагов и выполнить операцию записи.
После выполнения первой инструкции программы. ЦП увеличивает счетчик адресов на следующем тактовом импульсе и считывает содержимое программной памяти и так далее, и так далее.
Для инструкций ввода и вывода CPU будет сказано (в программной памяти) послать или выбрать данные в ПОРТ (который имеет адрес).
Иногда необходимо выполнять арифметические / логические операции, поэтому требуется временное хранилище. Здесь на помощь приходят регистры.
Точно так же он должен обрабатывать прерывание, генерируемое извне, поэтому существует блок обработки прерывания. Это гарантирует, что ЦП не прерывается в середине потока операции, а ожидает следующей точки (инструкции выборки) в программе.(ЦП запоминает, где он находится в программе, сохраняя адрес программы и различные регистры в «стековой» памяти).
Выбранный вами PIC-чип содержит множество других блоков, таких как умножитель 8 * 8, таймеры и т. Д. Каждый из них имеет адрес, линии управления и данные, связанные с ними. Некоторые требуют инициализации центральным процессором, а затем работают под своим управлением (например, таймер), некоторые хранят данные (не программную память). Некоторые общаются (UART, USB). Обратите внимание, что внутренний адрес, линии управления и данных недоступны с контактов.
Я надеюсь, что это даст вам более четкое представление о том, как работает чип и как «читать» содержащиеся внутри блоки.
8051 Блок-схема микроконтроллера | Электрический easy
Микроконтроллеры представляет собой интегрированный чип, содержащий все компоненты, которые в основном включают ЦП, ОЗУ, ПЗУ, порты ввода / вывода и таймеры. Микроконтроллеры имеют широкое применение во встроенных системы, такие как персональные компьютеры и другие исследовательские работы и т. д. Блок-схема микроконтроллера выражают внутреннее функционирование, если сегментация памяти и логические операции.В одной микросхеме все компоненты микроконтроллера построены. Компоненты микроконтроллера
CPU означает центральный процессор. это мозг для микроконтроллера. Встроенный ЦП с элементами и элементами управления все операции. Элементы встроены в CPU ALU: Arthematic logic unit, который выполняет математические операции, такие как сложение, вычитание, умножение и деление, а также выполняет логические операции, такие как AND, OR, NOT, XOR, NAND.Программа счетчик: он хранит 16-битный адрес данных и отслеживание программной последовательности. Куча указатель: указатель переменная, в которой хранится адрес другой переменной. Указатель стека хранит до 8-битного адреса, где хранились последние данные. Аккумулятор: это 8-битный регистр, выполнять действие автоматического запоминания любой математической операции. Регистры: регистры — это единица хранения. Есть номер, если регистры в CPU в котором хранятся различные данные, в основном используются регистры общего назначения регистры.Сроки & Контроль: синхронизация и контроль выполняют внутреннюю операцию с частотой часов управление сигналом и потоком данных микроконтроллера. Схема осциллятора также известна как тактовый генератор, который генерирует тактовые импульсы для работы микроконтроллера операция. Цепь осциллятора, состоящая из множества электрических компонентов и частотный резонатор. Этот частотный резонатор определяет скорость работы и частота тактовых импульсов. В микросхеме микроконтроллера определенное предоставляется объем памяти, в которой хранятся данные и программный код.Этот память называется памятью микросхемы. ПЗУ: постоянная память — это встроенная память который хранит программные инструкции и читает программу, когда устройство находится в рабочее состояние. RAM: оперативная память на кристалле память, в ней хранятся данные. Это также известно как память данных на кристалле. Это двухбайтовые регистры, используемые в программе. для определения периода времени или расчета количества событий, таких как Пульс измерение ширины, измерение частоты, подсчет импульсов и т. д. 5. прерывание логическая схема: Это логическая схема, которая определяет прерывания в микроконтроллере.Эта логическая схема состоит из разрешения прерывания. регистр, регистры приоритета прерывания и другие элементы. 6. последовательные и параллельные порты ввода / вывода: Микроконтроллер состоит из последовательного ввода / вывода порты, через которые внешние устройства могут подключаться к микроконтроллеру и передавать данные в битовой и байтовой формах соответственно. *Этот микроконтроллер имеет 4096 байт ПЗУ и 128 байт ОЗУ. * 8051 имеет 16-битные таймеры / счетчики, 32-битные линия двунаправленного ввода / вывода, организованная в виде четырех 8-битных частей. * Он обладает четыре банка регистров и возможность прямого байтового и битового адреса.* С 12 МГц кристалл, он имеет один цикл инструкции микросекунды. * Он обладает двухуровневая структура прерываний с приоритетом. * 128 пользователь доступны определенные программные флаги * Состоит нескольких режимов, высокоскоростной программируемый последовательный порт, функции вычисления четности. 1. микроконтроллер встроенный с RAM, ROM и периферийными устройствами 2. размер PCB для микроконтроллера меньше из-за меньших требований к оборудованию. 3. Стоимость меньше из-за меньших требований к оборудованию4. это состоит из множества функций обработки битов, поэтому управление составляет более
5.Каламбуры в микроконтроллере многофункциональны 6. скорость операции высока 7. есть наличие общего программного / аппаратного обеспечения у производителей. Различия между микропроцессорами и микроконтроллерами:| Состоит из АЛУ, блока управления, регистр и цепь прерывания | Он состоит из ПЗУ, ОЗУ, ввода / вывода. интерфейсный блок и другие периферийные устройства |
| Для поддержки битов обработки данных доступно только несколько инструкций | Обработка данных поддерживается многими инструкции, которые существуют |
| Многофункциональные штифты меньше | Больше количества многофункциональных контактов присутствуют |
| Доступны режимы адресации данных и программ. тем же | Доступны режимы адресации данных и программ. другой |
| Время задержки больше для доступа память и устройства ввода / вывода | |
| Требуется больше аппаратных компонентов следовательно, стоимость высока | Требуется меньше аппаратных компонентов следовательно стоимость низкая |
| Есть гибкое проектирование | Проектирование типичное и сложное |
| Нелегко синхронизировать связь между периферийными устройствами разной скорости. | Легко синхронизировать связь между периферийными устройствами разной скорости. |
.
