Как выбрать подходящие динамики для вашего усилителя. Какие параметры динамиков нужно учитывать. На что обратить внимание при подборе акустики к усилителю.
Что нужно знать о динамиках перед покупкой
При выборе динамиков для усилителя важно учитывать следующие ключевые параметры:
- Мощность динамиков (номинальная и пиковая)
- Импеданс (сопротивление) динамиков
- Чувствительность динамиков
- Диапазон воспроизводимых частот
- Размер и тип динамиков
Рассмотрим каждый из этих параметров подробнее, чтобы понять, как правильно подобрать акустику к имеющемуся усилителю.
Мощность динамиков — на что обратить внимание
Мощность динамиков измеряется в ваттах и бывает двух видов:
- Номинальная (RMS) мощность — мощность, которую динамик способен воспроизводить длительное время без повреждений
- Пиковая (максимальная) мощность — кратковременная пиковая мощность, которую выдерживает динамик
Как правильно сопоставить мощность динамиков и усилителя?
- Номинальная мощность динамиков должна быть равна или немного превышать номинальную мощность усилителя
- Пиковая мощность динамиков должна быть в 1.5-2 раза больше пиковой мощности усилителя
Например, если усилитель выдает 100 Вт на канал, то подойдут динамики с номинальной мощностью 100-150 Вт и пиковой 200-300 Вт.
Импеданс динамиков — почему это важно
Импеданс или сопротивление динамиков измеряется в Омах. Этот параметр крайне важен при подборе акустики к усилителю.
Основные правила по импедансу:
- Импеданс динамиков должен соответствовать рабочему импедансу усилителя
- Чаще всего встречаются динамики с сопротивлением 4 Ом и 8 Ом
- Нельзя подключать к усилителю динамики с меньшим сопротивлением, чем указано в характеристиках
При подключении нескольких динамиков к одному каналу усилителя нужно правильно рассчитать суммарный импеданс:
- При последовательном подключении импедансы складываются
- При параллельном подключении вычисляется обратная величина суммы обратных величин
Чувствительность динамиков — что это такое
Чувствительность измеряется в дБ и показывает, какое звуковое давление создает динамик при подаче на него сигнала мощностью 1 Вт с расстояния 1 м.

Чем выше чувствительность, тем громче будет звучать динамик при той же мощности усилителя. Разница в 3 дБ соответствует увеличению громкости в 2 раза.
Хорошими считаются динамики с чувствительностью:
- 85-88 дБ — для домашней акустики
- 90-92 дБ — для профессиональной акустики
- 95 дБ и выше — для концертной акустики
Диапазон частот — какой должен быть у хороших динамиков
Диапазон воспроизводимых частот показывает, какие звуки способен передавать динамик. Человеческое ухо воспринимает звуки в диапазоне 20 Гц — 20 кГц.
У качественных динамиков диапазон частот должен быть:
- Для низкочастотных — от 20-30 Гц в области НЧ
- Для среднечастотных — 500 Гц — 5 кГц
- Для высокочастотных — до 20 кГц и выше в области ВЧ
Чем шире диапазон частот, тем более детально и естественно будет звучать акустика.
Размер и тип динамиков — как выбрать оптимальный вариант
Размер динамиков влияет на качество воспроизведения разных частот:
- Большие НЧ-динамики (10″-15″) лучше передают бас
- Средние СЧ-динамики (4″-8″) хорошо воспроизводят вокал
- Маленькие ВЧ-динамики (до 2″) отвечают за высокие частоты
По типу различают:
- Широкополосные динамики — воспроизводят весь диапазон частот
- Коаксиальные — совмещают НЧ и ВЧ излучатели
- Компонентные — раздельные НЧ, СЧ и ВЧ динамики
Для качественного звучания рекомендуется использовать акустические системы с раздельными динамиками для разных частотных диапазонов.
Как правильно подключить динамики к усилителю
При подключении динамиков к усилителю нужно соблюдать следующие правила:
- Соблюдать полярность подключения («+» к «+», «-» к «-«)
- Использовать качественный акустический кабель нужного сечения
- Надежно зафиксировать контакты, чтобы исключить замыкания
- Не допускать перегрузки усилителя по мощности и импедансу
Правильное подключение обеспечит максимальное качество звучания вашей аудиосистемы.
Рекомендации по выбору динамиков для разных типов усилителей
Выбор динамиков зависит от типа и мощности вашего усилителя:
- Для маломощных усилителей (до 50 Вт) подойдут динамики с высокой чувствительностью
- К ламповым усилителям нужны динамики с высоким импедансом (8 Ом)
- Для мощных транзисторных усилителей можно брать низкоомные динамики (4 Ома)
- AV-ресиверы требуют многополосных акустических систем
Всегда сверяйте характеристики динамиков с параметрами вашего усилителя перед покупкой.

Заключение
Правильный подбор динамиков к усилителю — залог качественного звучания аудиосистемы. Учитывайте все ключевые параметры: мощность, импеданс, чувствительность и диапазон частот. Это позволит добиться максимальной отдачи от вашей акустики и усилителя.
Динамика и управление беспилотного планирующего крылатого летательного аппарата крестообразной схемы | Полищук
Аннотация
Рассмотрены вопросы динамики и управления беспилотного планирующего крылатого летательного аппарата крестообразной схемы в условиях автономного полета, исследовано влияние относительного удлинения крыла на его летно-технические характеристики. Предложена структура системы управления беспилотным планирующим крылатым летательным аппаратом в продольном и боковом каналах. Проведен сравнительный анализ баллистических дальностей полета изделий разных конфигураций, а также дальностей полета изделий разных конфигураций в условиях работы системы управления рассмотренной структуры. Предложена структура системы наведения беспилотного планирующего крылатого летательного аппарата на цель. Система наведения в продольном канале, в отличие от используемых в действующих в настоящее время образцах, состоит из двух подсистем, отвечающих за планирование беспилотного планирующего крылатого летательного аппарата на максимальную дальность на первом этапе полета и наведение непосредственно на точку цели на втором, заключительном этапе полета
Введение
В настоящее время беспилотные планирующие крылатые летательные аппараты (БПК ЛА), запускаемые с воздушных носителей (обычно самолетов-носителей), используются довольно часто и широко. Применение таких ЛА возможно как в гражданских целях, так и в военных. Существуют различные варианты аэродинамических компоновок БПК ЛА, однако до настоящего момента эти аэродинамические схемы не имели развитых крыльев большого удлинения. Необходимо отметить, что БПК ЛА рассматриваемого типа обычно не обладают маршевой силовой установкой на борту, что существенно усложняет вопросы, связанные с управлением такими ЛА.
Применение таких ЛА возможно как в гражданских целях, так и в военных. Существуют различные варианты аэродинамических компоновок БПК ЛА, однако до настоящего момента эти аэродинамические схемы не имели развитых крыльев большого удлинения. Необходимо отметить, что БПК ЛА рассматриваемого типа обычно не обладают маршевой силовой установкой на борту, что существенно усложняет вопросы, связанные с управлением такими ЛА.
Применение крыла большого удлинения на беспилотных летательных аппаратах (БЛА) рассматриваемого типа обусловлено возрастающими требованиями по дальности полета. Действительно, в большинстве случаев дальность автономного полета БПК ЛА играет существенную роль, повышая вероятность сохранности носителя [1, 2]. Например, заданная точка интереса (ТИ) может быть защищена средствами ПВО противника, или очаг лесного пожара находится ближе к центру возгорания, а чтобы до него добраться, пилоту необходимо справляться с дополнительной психофизической нагрузкой [3].
Как уже было отмечено, существуют различные схемы аэродинамических компоновок БПК ЛА рассматриваемого типа. Все они традиционно имеют Х-образный вид [3].
Все они традиционно имеют Х-образный вид [3].
Аэродинамический облик
Рассмотрены несколько гипотетических аэродинамических схем БПК ЛА. Первая аэродинамическая схема (далее — вариант 1) — БПК ЛА, выполненный по нормальной аэродинамической схеме с Х-образным крылом и цельноповоротными рулями в хвостовой части. На данный момент эта схема является стандартной в России для создания БПК ЛА (рис. 1).
Рис. 1. БПК ЛА Х-образной схемы
БПК ЛА, выполненный по аэродинамической схеме с установленными Х-образным раскрывающимся крылом и хвостовым оперением, представляет собой второй вариант аэродинамической схемы (далее — вариант 2), которая до настоящего времени в России не использовалась (рис. 2). В работе представлены три модификации данного варианта с различными удлинениями крыла: «малое», «среднее» и «большое» (далее — варианты 2а, 2б и 2в соответственно). Рассмотрена только конфигурация с раскрытым крылом, соответственно задача отделения от самолета-носителя и полета в условиях интерференции от него не исследуется.
Рис. 2. БПК ЛА Х-образной схемы с раскрывающимся крылом
Исследование баллистических характеристик БПК ЛА
Для БПК ЛА рассматриваемых схем построена математическая модель движения, на базе которой проведено моделирование запуска БПК ЛА с фиксированными нулевыми отклонениями рулевых поверхностей. Математическая модель пространственного движения ЛА стандартна и приведена в работах [2, 4]. Выполнено моделирование нескольких вариантов компоновок БПК ЛА для двух начальных высотно-скоростных режимов — с малых и с больших высот.
Результаты моделирования баллистического полета различных вариантов БПК ЛА в вертикальной плоскости представлены на рис. 3. Максимальные относительные дальности баллистического полета рассмотренных вариантов БПК ЛА (за 100 % взята дальность полета первого варианта БПК ЛА) следующие:
- старт с малых высот: вариант 1 — 100 %, вариант 2а — 97 %, вариант 2б — 128 %, вариант 2в — 73 %;
- старт с больших высот: вариант 1 — 100 %, вариант 2а — 111 %, вариант 2б — 128 %, вариант 2в — 86 %.

Моделирование показало, что при полете по баллистике (отклонения рулей в каналах тангажа, рыскания и крена отсутствуют, δΒ= δ н= δκρ = 0°) с малых и больших высот максимальная дальность полета БПК ЛА достигается при среднем относительном удлинении крыла (вариант 2б), при этом превышение дальности в сравнении с компоновкой БПК ЛА в варианте 1 составляет 28 %.
Система управления БПК ЛА может быть условно разделена на две подсистемы: стабилизации и наведения.
Система стабилизации перегрузок и углового положения БПК ЛА
Структура системы стабилизации, реализованная ПИД-регуляторами, разработана как единая для всех полетных конфигураций (сложенное крыло и раскрытое крыло).
Продольный канал:
Здесь ΔδΒ , ΔδΗ, Δδκρ — отклонения рулей соответственно в каналах тангажа, рыскания и крена, град;
— коэффициенты усиления;
Δθ, Δγ — приращения по углам тангажа и крена, град;
Δωz, Δωy, Δωx — приращения угловых скоростей в каналах тангажа, рысканья и крена, град/с;
Δ0γπρ, γynp — заданные значения углов тангажа и крена (рассчитывается в системе управления), град;
Δθтек, 1тек — текущие значения углов тангажа и крена, град;
∆nz — приращение боковой перегрузки.
В рассматриваемой задаче предполагается, что управление осуществляется рулевыми поверхностями хвостового оперения.
Система стабилизации БПК ЛА является адаптивной и построена с учетом принципа адаптации коэффициентов усиления к текущим высотно-скоростным параметрам полета БПК ЛА. Коэффициенты усиления подбираются для различных высотно-скоростных режимов полета по методике, описанной в работах [1, 2]. Текущие значения коэффициентов вычисляются с помощью методов линейной интерполяции.
Система наведения
Задача системы наведения — формирование управляющих сигналов в систему стабилизации для выполнения той или иной задачи. Для увеличения эффективности применения БПК ЛА требуется максимизация дальности его автономного полета. При этом существует также и необходимость доставки полезной нагрузки в заданную точку. Для выполнения этих двух задач одновременно предлагается условно разделить систему наведения БПК ЛА на две подсистемы: отвечающую за автономный планирующий полет на максимально возможную дальность и за доставку БПК ЛА в заданную точку.
На рис. 4 представлена схема работы системы наведения в зависимости от профиля полета БПК ЛА.
Рис. 4. Работа системы наведения БПК ЛА
Предлагаемая система организации управления является принципиально новой для ЛА рассматриваемого типа. Необходимо подчеркнуть, что БПК ЛА, в отличие, например, от ракет, не обладает силовой установкой, что вызывает существенные сложности в организации управления особенно при его формировании для планирования на максимальную дальность.
Планирование на максимальную дальность. Интуитивно ясно, что достижение максимальной дальности возможно при полете БПК ЛА с максимальным аэродинамическим качеством.
Зависимость угла тангажа от максимального значения аэродинамического качества Kmax вычисляется из уравнений движения ЛА при снижении, приведенных в работе [4]. Введем коэффициент усиления Ktet для формирования управляющего сигнала, тогда его значение будет вычисляться следующим образом:
Значение Kmax известно для различных высотно-скоростных режимов полета по результатам продувок в аэродинамической трубе или расчетов аэродинамических характеристик.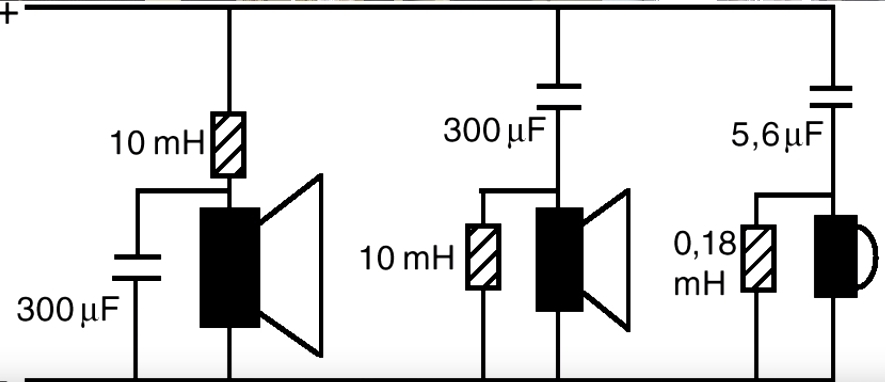 Для текущего режима полета это значение находится путем интерполяции.
Для текущего режима полета это значение находится путем интерполяции.
Наведение в заданную точку. Дальность до цели Dм, абсолютное значение горизонтальной дальности до цели Drop м, земная скорость Vм и скорость горизонтального сближения с целью Vrop м будем вычислять через следующие параметры: координаты БПК ЛА — Xg м,Yg м, Zg м, координаты цели — , составляющие скорости БПК ЛА — Vxм,Vyм,Vzм :
Для самонаведения БПК ЛА будем использовать метод пропорционального сближения [1-3, 5].
Наведение по углу наклона траектории
Как уже было указано, для проектирования полета на максимальную дальность в настоящей работе использован метод, основанный на стабилизации угла наклона траектории. При полете БПК ЛА в любой момент времени может быть рассчитан угол наклона линии визирования цели φ лв:
где Drop — значение горизонтальной дальности до цели;
D — значение наклонной дальности до цели (рис. 5).
5).
Рис. 5. Взаимное положение БПК ЛА и цели
Для увеличения эффективности применения БПК ЛА в ряде случаев необходимо максимизировать угол подхода к конечной точке траектории. Для реализации функций наведения и максимизации конечного угла подхода в продольном канале предложено использовать описанную выше систему стабилизации углового положения БПК ЛА.
В определенный момент времени взаимное положение БПК ЛА и цели составит угол наклона линии визирования цели, соответствующий φгρ — граничному значению, заданному в зависимости от задачи, которая поставлена перед БПК ЛА. Таким обзором, после преодоления этого момента времени управляющий сигнал по углу наклона траектории
θупр = _ ϕлв ·
Использование данного алгоритма позволяет достаточно точно навести БПК ЛА на конечную точку траектории и при этом обеспечить подход к ней с требуемым углом наклона траектории.
Результаты моделирования
С помощью описанной математической модели проведены моделирование полета БПК ЛА рассматриваемых вариантов и сравнительный анализ их летно-технических характеристик. Для наглядности моделирование проведено с одинаковыми начальными условиями.
Для наглядности моделирование проведено с одинаковыми начальными условиями.
Типовые результаты моделирования и характер траектории полета рассматриваемых ЛА представлены на рис. 6, 7.
Рис. 6. Траектория полета БПК ЛА в вертикальной плоскости (вариант 2а)
Результаты моделирования для БПК ЛА всех рассматриваемых конфигураций схожи с представленным результатом.
Заключение
В работе было исследовано влияние различных факторов на динамику и управление БПК ЛА крестообразной схемы. Для этого выполнены следующие действия:
- построена математическая модель пространственного движения БПК ЛА;
- спроектирован облик системы стабилизации перегрузок и углового положения БПК ЛА;
- спроектирован облик системы наведения БПК ЛА на цель.
Представленная система наведения, в отличие от используемых в настоящее время, состоит из двух подсистем, отвечающих за планирование БПК ЛА на максимальную дальность на первом этапе полета и наведение непосредственно на точку цели на втором, заключительном этапе полета. Применение такой системы управления является новым для БПК ЛА и существенно увеличивает летно-технические характеристики таких изделий.
Применение такой системы управления является новым для БПК ЛА и существенно увеличивает летно-технические характеристики таких изделий.
Обновление модуля Роторная динамика — особенности версии COMSOL® 5.3a
Пользователям модуля Роторная динамика в COMSOL Multiphysics® версии 5.3a предлагается шесть типов подшипников качения, новая мультифизическая связь между моделями роторной динамики и моделями твердых тел и новый гидродинамический упорный подшипник. Ниже описаны улучшения модуля роторной динамики.
Подшипник качения
К модулю Роторная динамика были добавлены шесть новых типов подшипников качения:
- Шариковый подшипник с глубоким желобом
- Радиально-упорный шариковый подшипник
- Самоустанавливающийся шариковый подшипник
- Подшипник с бочкообразными роликами
- Подшипник с цилиндрическими роликами
- Подшипник с коническими роликами
Каждый подшипник может иметь один или два ряда тел качения. Модель учитывает нелинейную контактную жесткость тел качения, внешнего кольца и внутреннего кольца.
Схемы шести типов подшипников и их геометрические параметры. Вид спереди (слева внизу) показывает, что нагрузка приходится только на часть тел качения.
Посмотреть скриншот
Взаимосвязь моделей гидродинамических подшипников и моделей твердых тел
Новая мультифизическая связь Soild-Bearing (Твердое тело — подшипник) связывает модели подшипников скольжения в интерфейсе Hydrodynamic Bearing (Гидродинамический подшипник) с моделями подвижных твердых тел из интерфейсов Soild Mechanics (Механика твердого тела) и Multibody Dynamics (Динамика многотельных систем). Подшипник при этом может быть как неподвижным, так и закрепленным на подвижной детали.
Модель гибкого вала, который вращается в гидродинамическом подшипнике скольжения, построенная с помощью модуля Динамика многотельных систем. Распределение давления в подшипнике сильно зависит от изгиба вала.
Распределение давления в подшипнике сильно зависит от изгиба вала.
Гидродинамические упорные подшипники
В интерфейсе Hydrodynamic Bearing (Гидродинамический подшипник) теперь можно рассчитать модель Hydrodynamic Thrust Bearing (Гидродинамический упорный подшипник), появившуюся в версии 5.3a программного пакета COMSOL Multiphysics®. Эта функция поддерживает подшипники типов Tilted Pad (Сегментный), Tapered (Конический) и User Defined (Пользовательский). Сегментные упорные подшипники могут иметь точку вращения или ось вращения. Кроме того, можно учесть кавитацию в смазке.
Посмотреть скриншот
Распределение давления и профиль опоры в упорном подшипнике.
Улучшенные стандартные графики
Стандартные графики в физических интерфейсах механики конструкций улучшены и теперь показывают более информативные визуализации. Учебные модели в Библиотеке приложений тоже были улучшены. Самые заметные изменения приведены ниже:
- Цветовая схема для графиков напряжения по Мизесу — RainbowLight
- Цветовая схема для графиков формы моды, собственной частоты и анализа линейной устойчивости — AuroraBorealis
- На графиках формы моды по умолчанию выключены обозначения, чтобы подчеркнуть, что амплитуда моды не имеет физического смысла
- Цветовая схема Wave с симметричным диапазоном цветов для графиков силы, действующей на профиль, в интерфейсах Beam (Балка) и Truss (Ферма)
- Она позволяет с первого взгляда отличать, например, сжатие от растяжения
- В анализ контакта добавлен график контактного давления — линейный график в двухмерных моделях и контурный график в трехмерных моделях
- В стандартный график для Stress Linearization (Линеаризация напряжения) добавлены обозначения
- Стандартный график Undeformed geometry (Геометрия до деформации) интерфейса Shell (Оболочка) изменил цвета
- Если используется модель пластичности или ползучести материала, то на график напряжения накладывается контурный график соответствующего показателя деформации, например эффективной пластической деформации
- Доступно в модуле Нелинейные материалы и в модуле Геомеханика
- В интерфейсе Fatigue (Усталость материала) для коэффициента использования и наработки на отказ используется цветовая схема Traffic
- Доступно в модуле Усталость материала
В этом примере можно увидеть более яркие цвета на графике напряжения (цветовая схема RainbowLight) и добавлены по умолчанию контуры пластической деформации и контуры контактного давления.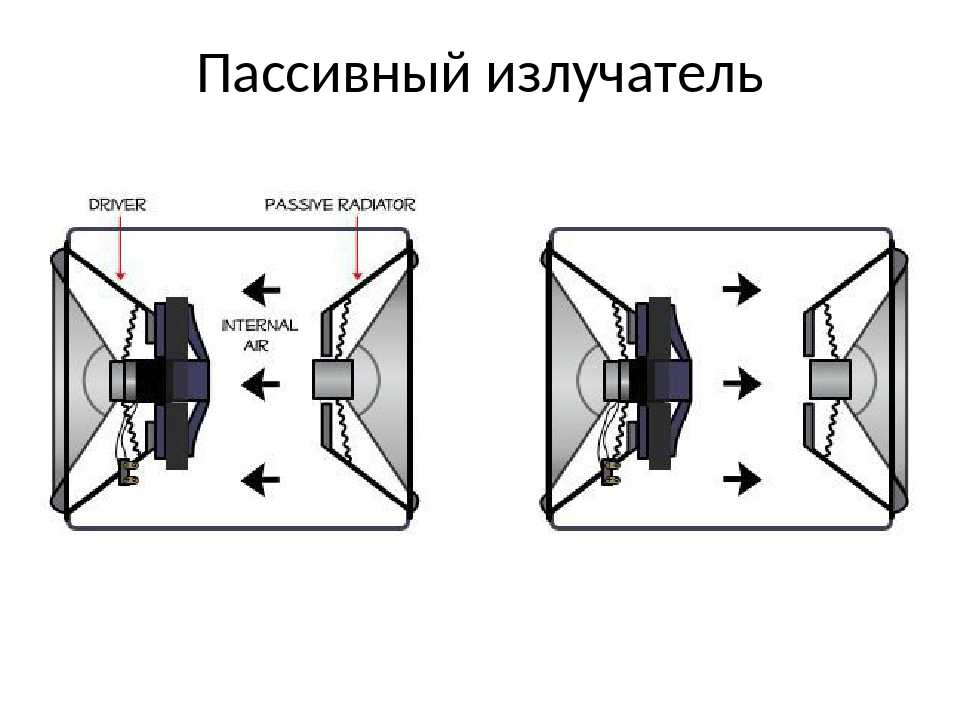 Для сравнения представлен стандартный график в версии 5.3 COMSOL Multiphysics® для этой же модели.
Для сравнения представлен стандартный график в версии 5.3 COMSOL Multiphysics® для этой же модели.
Новая учебная модель Stability of a Turbocharger Influenced by Cross-Coupled Bearing Forces (Устойчивость турбокомпрессора под действием сил со стороны подшипника)
Взаимосвязанные силы, действующие в гидродинамическом подшипнике, часто вызывают нежелательные потери в роторе. Вблизи критической частоты вращения это может привести к неконтролируемым вибрациям турбокомпрессора и разрушению подшипника. В этой учебной модели можно исследовать влияние взаимосвязанных сил на динамику ротора и методы подавления вибраций.
Первая собственная мода колебаний системы на частоте 500 об. /мин и каскадная диаграмма, показывающая амплитуду смещения в зависимости от частоты вращения и частоты возбуждения.
/мин и каскадная диаграмма, показывающая амплитуду смещения в зависимости от частоты вращения и частоты возбуждения.
Путь в Библиотеке приложений:
Rotordynamics_Module/Automotive_and_Aerospace/turbocharger_stability_analysis
Новая учебная модель Effect of Roller Bearing Clearance on Nonsynchronous Vibration of a Rotor (Влияние зазора подшипника качения на несинхронные вибрации ротора)
Зазоры подшипников обычно сводятся к минимуму, чтобы избежать несинхронных вибраций ротора. Однако малые зазоры снижают срок службы подшипника. Эта учебная модель сравнивает вибрации, вызванные нелинейностью контакта, для различных размеров зазора.
Динамическая характеристика для различных размеров зазора подшипника; наибольший зазор приводит к неустойчивости, на подшипник начинают действовать большие по модулю нерегулярные силы.
Путь в Библиотеке приложений:
Rotordynamics_Module/Tutorials/nonsynchronous_rotor_vibration_with_roller_bearing
Как выбрать лучшие динамики для усилителя
Динамики преобразуют аналоговый аудиосигнал от аудиоусилителя в звуковые волны, которые может слышать человеческое ухо. Динамики могут быть такими же простыми, как пассивный зуммер, или изысканными, как пара аудиодинамиков HiFi.
В этой статье мы рассмотрим, как работают динамики, как правильно подобрать динамики для вашего усилителя и как рассчитать мощность и ток, протекающий через динамик.
Части динамика
Ниже показано поперечное сечение динамика:
Как работают динамики
Звуковой сигнал передается через звуковую катушку.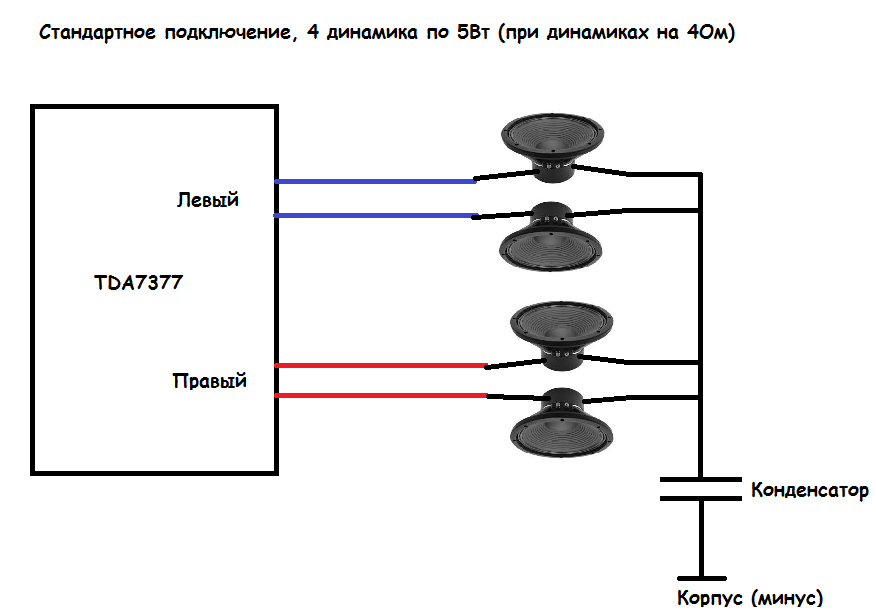 Это создает магнитное поле, которое меняется в зависимости от полярности аудиосигнала. Звуковая катушка расположена в постоянном постоянном магнитном поле, создаваемом полюсным наконечником и верхней полюсной пластиной. Это заставляет звуковую катушку вибрировать вверх и вниз в соответствии со звуковым сигналом.
Это создает магнитное поле, которое меняется в зависимости от полярности аудиосигнала. Звуковая катушка расположена в постоянном постоянном магнитном поле, создаваемом полюсным наконечником и верхней полюсной пластиной. Это заставляет звуковую катушку вибрировать вверх и вниз в соответствии со звуковым сигналом.
Вибрирующая звуковая катушка заставляет вибрировать диафрагму, что создает звуковые волны в воздухе перед диффузором.
Существует несколько различных типов динамиков, классифицированных по диапазону звуковых частот, с которыми они могут работать:
- Сабвуферы – от <20 Гц до 200 Гц
- Низкочастотные динамики – от 20 Гц до 2 кГц
- СЧ – от 150 Гц до 5 кГц 900 – от 2 кГц до 20 кГц
Технические характеристики динамика
На динамике должна быть маркировка с указанием частотного диапазона, импеданса и номинальной мощности.
- Диапазон частот: диапазон звуковых частот, которые может воспроизводить динамик.
- Импеданс: Поскольку звуковая катушка является индуктивной, громкоговорители имеют импеданс. Выбранный вами импеданс будет зависеть от вашего усилителя. В руководстве пользователя вашего усилителя должно быть указано, какой импеданс динамика использовать.
- Номинальная мощность: Доверять следует только среднеквадратичной мощности (в ваттах). Динамик со среднеквадратичной мощностью 100 Вт должен непрерывно воспроизводить синусоидальный сигнал мощностью 100 Вт.
Как подобрать динамики, подходящие для вашего усилителя
Сопротивление динамика — это сопротивление динамика звуковым сигналам от усилителя. Более низкий импеданс динамика означает, что динамик следует использовать с усилителями большей мощности. Более высокий импеданс динамика означает, что следует использовать усилитель меньшей мощности.
При последовательном соединении динамиков импедансы суммируются. Например, при последовательном соединении двух динамиков сопротивлением 4 Ом общее сопротивление составляет 8 Ом.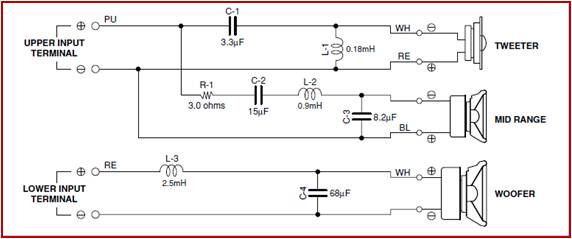
При параллельном подключении двух динамиков общее сопротивление делится на два. Таким образом, при параллельном подключении двух динамиков сопротивлением 4 Ом общее сопротивление составляет 2 Ом.
Ламповые усилители требуют правильного импеданса динамиков, в то время как полупроводниковые усилители обычно не заботятся о согласовании импедансов.
Как рассчитать мощность усилителя
Рассмотрим усилитель с выходным размахом 21 В RMS и подключенными динамиками 8 Ом. Чтобы рассчитать выходную мощность усилителя с этими динамиками, используйте следующую формулу:
P = V 2 / R
Где
P: Выходная мощность (Вт)
В: Среднеквадратичное напряжение усилителя (В)
R: Полное сопротивление динамика (Ом)
При выходном напряжении 21 В RMS и динамике 8 Ом мощность составляет:
P = 21 В 2 / 8 Ом
P = 55 Вт
Это предполагает, что блок питания может обеспечить эту мощность.
Как рассчитать ток динамика
Теперь, какой ток проходит через динамик? Это можно рассчитать по закону Ома:
I = V / R
Таким образом, в этом примере мы имеем
I = 21 В / 8 Ом = 2,6 А
Надеюсь, эта статья помогла вам понять, как правильно выбрать динамики для ваш усилитель! Обязательно оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Как активировать схему громкоговорителя
схема системы громкоговорителей для обеспечения автономного усиления любого музыкального источника, который может быть напрямую подключен к активной акустической системе.
Введение
С появлением ультрасовременных мобильных телефонов стало возможным хранить огромные музыкальные данные и слушать их одним движением пальца. Но прослушивание музыки становится значительно приятнее только в том случае, если она сильно усилена и воспроизводится через активные громкоговорители или системы, включающие схему усилителя громкоговорителей.
Усиление небольшого музыкального сигнала с мобильного телефона или аналогичного источника и прослушивание его через активные громкоговорители может стать более интересным, а результат просто потрясающим. Полная идея дизайна и схема простого усилителя для динамиков производятся здесь.
Обычный громкоговоритель может быть трехполосным с подключенным усилителем, оснащенным обычными регуляторами низких частот и т. д. Какими бы хорошими они ни были по своим характеристикам, они никогда не смогут превзойти качество звука, которое обычно достигается с помощью активных громкоговорителей. . Будь то качество или мощность, они являются лучшими устройствами для воспроизведения звука.
д. Какими бы хорошими они ни были по своим характеристикам, они никогда не смогут превзойти качество звука, которое обычно достигается с помощью активных громкоговорителей. . Будь то качество или мощность, они являются лучшими устройствами для воспроизведения звука.
Создание активной акустической системы может показаться сложным, но может быть очень забавным, и однажды построенное устройство действительно может доставить удовольствие, услышав его великолепный отклик.
Хотя стоимость по сравнению с пассивным аналогом намного выше, активная система определенно имеет явное преимущество перед пассивными системами.
Преимущества активной акустической системы
Различные преимущества встроенного усилителя громкоговорителя по сравнению с пассивной конструкцией могут быть перечислены следующим образом:
Не требуются внешние усилители и громоздкая проводка.
Отсутствие цепей пассивных фильтров с резисторами и катушками индуктивности означает повышение общей эффективности выходного отклика за счет отсутствия потерь мощности за счет рассеивания тепла, обычно связанного с резисторами пассивных фильтров.
В отличие от пассивных фильтров, активные фильтры помогают усилить заданные отклики. С пассивными фильтрами все наоборот, они имеют тенденцию сильно ухудшать входной музыкальный отклик.
Здесь мы обсудим одну из таких схем активных громкоговорителей, способных преобразовывать даже обычный музыкальный вход в выдающееся воспроизведение. Давайте прочитаем детали его схемы.
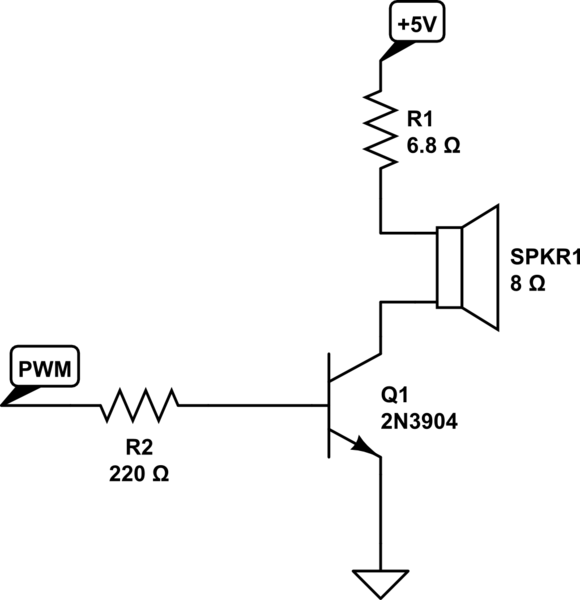
Работа схемы
В следующих пунктах будет рассмотрена одна из таких схем усилителя динамиков, способная преобразовать даже обычный музыкальный вход в выдающееся воспроизведение.
Идея очень проста: скорректировать входные сигналы, пропустив их через соответствующие фильтры нижних и верхних частот на входных каскадах, а затем усилить этот объемный контент до подходящей высокой громкости с помощью обычного усилителя.
Делаем точно так же, как указано выше; Ссылаясь на рисунок, мы видим, что одиночная микросхема TL072, которая по сути является двойным операционным усилителем в одном корпусе, дискретно сконфигурирована на два отдельных фильтра.
IC 2A подключается как стандартный фильтр верхних частот. Как следует из названия, схема пропускает только заданную степень высоких входных частот. Частота среза может составлять около 3 кГц и может изменяться путем регулировки VR1 и VR2 или любого из них.
IC 2B имеет прямо противоположную конфигурацию, т.е. как фильтр нижних частот, и пропускает только заданную степень частот в нижних диапазонах, частота среза составляет 2,5 кГц. Он остановит все частоты выше этого. Отклик регулируется с помощью VR3.
Вышеупомянутый соответствующим образом откорректированный звук теперь просто подается на аудиоусилитель для требуемого усиления через подключенные громкоговорители.
Канал, отвечающий за воспроизведение более высоких частот, использует твиттер для лучшей оптимизации, в то время как другая секция, которая обрабатывает более низкие частоты, интегрирована в низкочастотный динамик для соответствующей оптимизации вывода басов.
О компании Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем/печатных плат, производитель.