Какие бывают структурные схемы электроприводов. Как устроены разные типы электроприводов. Для чего применяются различные схемы электроприводов. Каковы преимущества и недостатки разных структурных схем.
Основные типы структурных схем электроприводов
Структурные схемы электроприводов различаются в зависимости от способа регулирования скорости и типа используемых преобразовательных и управляющих устройств. Основными типами являются:
- Редукторный электропривод со ступенчатым регулированием скорости
- Регулируемый электропривод с бесступенчатым регулированием скорости
- Шаговый электропривод с дискретным перемещением
- Следящий электропривод
Редукторный электропривод со ступенчатым регулированием скорости
Структурная схема редукторного электропривода включает следующие основные элементы:
- Нерегулируемый асинхронный электродвигатель переменного тока
- Редуктор с электромагнитными муфтами
- Ходовой винт
- Система числового программного управления (СЧПУ)
- Датчик обратной связи по положению
Как работает такой электропривод? При начале движения СЧПУ включает электромагнитную муфту, и вращение от двигателя через редуктор передается на ходовой винт. При подходе к точке останова СЧПУ переключает муфты для медленного перемещения и торможения.
Регулируемый электропривод с бесступенчатым регулированием скорости
Структурная схема регулируемого электропривода содержит:
- Электродвигатель постоянного тока
- Статический преобразователь (например, тиристорный)
- Систему числового программного управления
- Датчик обратной связи по положению
Этот тип электропривода обеспечивает плавное регулирование скорости в широком диапазоне за счет изменения напряжения питания двигателя. Он применяется в позиционных и прямоугольных системах ЧПУ.
Шаговый электропривод с дискретным перемещением
Структурная схема шагового электропривода включает:
- Шаговый электродвигатель
- Гидроусилитель момента
- Кинематическую пару винт-гайка
- Систему числового программного управления
Принцип работы шагового электропривода заключается в том, что шаговый двигатель поворачивается на фиксированный угол при каждом управляющем импульсе от СЧПУ. Гидроусилитель момента обеспечивает необходимое усилие для перемещения рабочего органа.
Следящий электропривод
Следящий электропривод применяется в контурных системах ЧПУ и обеспечивает движение рабочего органа по заданной траектории. Его структурная схема содержит:
- Электродвигатель (постоянного или переменного тока)
- Преобразователь
- Датчики обратной связи по положению и скорости
- Систему управления
Система управления непрерывно отслеживает рассогласование между заданным и фактическим положением и формирует управляющие воздействия для его минимизации.
Особенности применения различных структурных схем электроприводов
Выбор структурной схемы электропривода зависит от требований к точности, быстродействию и диапазону регулирования скорости:
- Редукторные электроприводы просты, но обеспечивают только ступенчатое регулирование скорости
- Регулируемые электроприводы постоянного тока позволяют плавно регулировать скорость в широком диапазоне
- Шаговые электроприводы обеспечивают высокую точность позиционирования
- Следящие электроприводы применяются для движения по сложным траекториям
При выборе схемы учитываются также стоимость, надежность, простота обслуживания и другие факторы.
Преимущества и недостатки различных структурных схем электроприводов
Каковы основные плюсы и минусы разных типов структурных схем электроприводов?
Редукторный электропривод:
Преимущества:
- Простота конструкции
- Низкая стоимость
- Высокая надежность
Недостатки:
- Ступенчатое регулирование скорости
- Ограниченный диапазон регулирования
Регулируемый электропривод постоянного тока:
Преимущества:
- Плавное регулирование скорости
- Широкий диапазон регулирования
- Высокое быстродействие
Недостатки:
- Высокая стоимость
- Сложность обслуживания коллекторного узла
Шаговый электропривод:
Преимущества:
- Высокая точность позиционирования
- Простота управления
- Работа без датчика обратной связи
Недостатки:
- Ограниченный момент
- Возможность потери шагов
Применение структурных схем электроприводов в различных отраслях
Структурные схемы электроприводов находят широкое применение в различных отраслях промышленности и техники:
Станкостроение
В металлорежущих станках с ЧПУ применяются:
- Следящие электроприводы подач
- Регулируемые электроприводы главного движения
- Шаговые электроприводы вспомогательных механизмов
Робототехника
В промышленных роботах используются:

- Следящие многоосевые электроприводы
- Шаговые электроприводы схватов
Подъемно-транспортные машины
В кранах, лифтах, конвейерах применяются:
- Редукторные электроприводы
- Регулируемые электроприводы постоянного и переменного тока
Прокатное производство
В прокатных станах используются:
- Мощные регулируемые электроприводы постоянного тока
- Системы согласованного управления многодвигательными электроприводами
Правильный выбор структурной схемы электропривода позволяет обеспечить требуемые технологические показатели оборудования при оптимальных технико-экономических характеристиках.
Современные тенденции развития структурных схем электроприводов
Каковы основные направления совершенствования структурных схем электроприводов в настоящее время?
- Применение цифровых систем управления на базе микропроцессоров и DSP
- Использование интеллектуальных алгоритмов управления (нечеткая логика, нейронные сети)
- Внедрение полностью цифровых электроприводов
- Применение высокоэффективных синхронных двигателей с постоянными магнитами
- Разработка безредукторных прямых электроприводов
- Создание мехатронных модулей, объединяющих двигатель, редуктор и систему управления
Эти тенденции направлены на повышение точности, быстродействия, энергоэффективности и функциональных возможностей электроприводов при снижении их стоимости и повышении надежности.

Типы и назначение электропривода — Часть 1 из 3: Общая структурная блок-схема
Основной задачей электропривода является приведение в движение рабочего органа производственного механизма по определенному закону. Закон изменения параметров электрического привода зависит от технологического процесса, выполняемого производственным механизмом, для которого данный электрический привод используется. Электропривод включает в себя определенные взаимосвязанные и взаимодействующие друг с другом электрические, механические и электромеханические устройства.
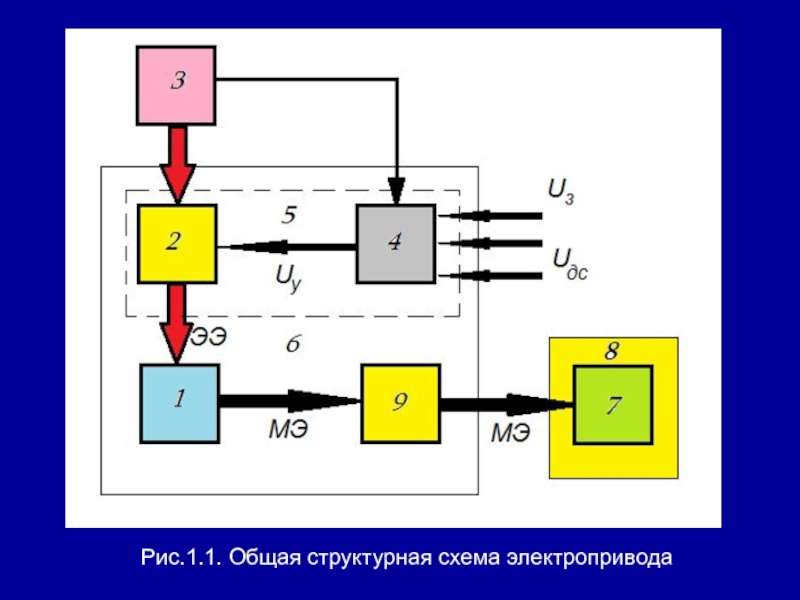
Общая структурная блок-схема электропривода.
Основным элементом электрического привода 6 является электрический двигатель 1, который является электромеханическим преобразователем поступающей от источника питания 3 электрической энергии (ЭЭ) в механическую энергию (МЭ), приводящую в движение рабочий орган 7 производственного механизма 8.
Основной задачей электрического двигателя 1 является преобразование электрической энергии в механическую, однако, электрический двигатель в системе электрического привода может производить и обратное преобразование механической энергии, запасенной в рабочем органе производственного механизма, в электрическую энергию. Такой режим работы электрического привода называется тормозным.
От электродвигателя механическая энергия передается рабочему органу 7 производственного механизма 8 через передачу 9. Передача 9 может быть механической, гидравлической или электромагнитной.
За счет механической энергии, передаваемой от двигателя 1 через передачу 9, рабочему органу 7 сообщается механическое движение. В задачу передачи 9 входит согласование параметров движения электрического двигателя и производственного механизма.
Существует много электрических приводов, у которых электродвигатель соединяется без передачи с рабочим органом производственного механизма, то есть осуществляется, так называемая, непосредственная передача. Электроприводы с непосредственной связью между двигателем и производственным механизмом экономически более выгодны и более надежны в работе. Отсюда можно сделать вывод, что механическая передача не является обязательным элементом электрического привода.
Электроэнергия поступает от источника питания 3 на электродвигатель через преобразователь 2, который используется для согласования параметров сети с параметрами электродвигателя и для управления потоком электроэнергии. Управление потоком электрической энергии осуществляется с помощью системы управления преобразователем 4. Силовой блок преобразователя 2 и блок управления 4 объединены в единое преобразующее устройство 5. Во многих электрических приводах электроэнергия от источника питания поступает напрямую на электродвигатель. Отсюда следует, что преобразователь 5 может отсутствовать в системе электропривода и является необязательным элементом электрического привода.
Блок-схема основных элементов электрического привода, без которых он не может работать.
Все части: 1 | 2 | 3
Электропривод ГЗ-OФ(М).150/22М
Электропривод ГЗ-OФ(М).150 применяется для управления запорной промышленной арматурой, имеющей четвертьоборотный запорный орган и устанавливаются в помещениях, под навесом, и на открытом воздухе. Электропривод может работать в системах автоматического регулирования технологическими процессами. Установочное положение привода — любое.
Электроприводы рассчитаны для работы кратковременном режиме S2 по ГОСТ 183-74 с продолжительностью включения 15 мин., ч частотой включений до 60 раз в час, а также для работы в режиме автоматического регулирования не более 600 включений в час.
Питание электропривода осуществляется от сети переменного тока напряжением 220 В или 380 В по 3-х фазной схеме, частотой 50 Гц, в зависимости от установленного в нем электродвигателя.
Электропривод позволяет осуществлять:
- Закрытие и открытие затвора арматуры, как дистанционно, с диспетчерского пульта управления, так и в ручном режиме, с помощью маховика при отсутствии электрического питания;
- Автоматическое отключение электродвигателя ограничителем хода выходного вала электропривода при достижении затвором арматуры крайних положений;
- Автоматическое отключение электродвигателя двухсторонней муфтой ограничения крутящего момента, при достижении величины установленного крутящего момента на выходном валу электропривода в положениях ЗАКРЫТО, ОТКРЫТО или при аварийной остановке затвора арматуры в процессе работы на закрытие или открытие (только для ГЗ-ОФ(М))
- Защиту электродвигателя от перегрева при перегрузках (тепловое реле).
Пример условного обозначения четвертьоборотного электропривода ГЗ-ОФ(М) с двусторонней муфтой ограничения крутящего момента с максимальным крутящим моментом на выходном валу — 300 Нм, со временем поворота выходного вала на 90 градусов — 28 с, климатического исполнения У1, с 3-х фазным электродвигателем 380 В, частотой 50 Гц: Электропривод ГЗ-ОФ-300/28М.У1 3х380В ТУ 3791-001-96569271-2006
Технические характеристики электропривода
Область применения | Приводные исполнительные механизмы позволяют надежно управлять работой дисковых затворов, шаровых кранов и другой арматуры с углом поворота рабочего органа на 90°±10° |
Вращающий момент | 25 — 600 Н·м |
Параметры электросети | В зависимости от комплектации: — 220 В переменного тока / 1 фаза / 50 Гц — 380 В переменного тока / 3 фазы / 50 Гц — 24 В постоянного тока — опция |
Дизайн | Серии ГЗ-ОФ(М) и ГЗ-ОФ(К) отличаются современным дизайном и компактной конструкцией благодаря упрощенному механизму редуктора и алюминиевому корпусу. |
Водонепроницаемость | Для водонепроницаемости по IP67 используются резиновые герметизирующие кольца во всех стыках (по запросу IP68). |
Бесшумность | Двухступенчатая червячная передача и червячный привод обеспечивают бесшумную и ровную работу приводов серий ГЗ-ОФ(М), ГЗ-ОФ(К). |
Удобство и простота использования | Ряд уникальных конструкторских решений делает приводы серий ГЗ-ОФ(М) и ГЗ-ОФ(К) удобными в управлении и эксплуатации. |
Схема электропривода
- 1) Индикатор положения
- 2) Блок концевых выключателей
- 3) Ограничитель крутящего момента
- 4) Червячный вал
- 5) Ведущая шестерня червячного вала
- 6) Муфта переключателя управления
- 7) Электродвигатель
- 8) Маховик
Основные параметры электроприводов серии ГЗ-ОФ(М)
Обозначение ГЗ-ОФ(М) | Вых-й крутящий момент | Время поворота | Макс. диаметр штока | Мощность двигателя, Вт | Ном-й ток двигателя, А | Передаточное число ручной передачи | Вес | ||
Н*м | сек / 900 | мм | 1 фаза 220 В | 3 фазы 380 В | 1 фаза 220 В | 3 фазы 380 В | кг | ||
I группа | |||||||||
70/5.5М | 70 | 5.5 | Ø 22 | 60 | 30 | 0.7 | 0.26 | 15 | 10 |
110/11М | 110 | 11 | |||||||
150/22М | 150 | 22 | |||||||
II группа | |||||||||
120/7М | 120 | 7 | Ø 35 | 90 | 60 | 1.1 | 0.4 | 16 | 14 |
200/14М | 200 | 14 | |||||||
300/28М | 300 | 28 | |||||||
III группа | |||||||||
200/7М | 200 | 7 | Ø 42 | 150 | 90 | 1.8 | 0.8 | 14 | 22 |
400/14М | 400 | 14 | |||||||
600/28М | 600 | 28 | |||||||
Схема подключения электропривода ГЗ-ОФ(К), ГЗ-ОФ(М) к сети 220 В, 50 Гц.
Обозначение
- 1. Внутренние соединения показаны внутри пунктирной линии, внешние соединения приведены для справочных целей.
- 2. Красным цветом обозначены дополнительные элементы, входящие в состав электропривода ГЗ-ОФ(М).
М | Электродвигатель |
1КВО | Конечный микровыключатель ОТКРЫТО |
1КВЗ | Конечный микровыключатель ЗАКРЫТО |
2КВО | Микровыключатель указателя положения ОТКРЫТО |
2КВЗ | Микровыключатель указателя положения ЗАКРЫТО |
1ВМО | Муфтовый микровыключатель открытия |
1ВМЗ | Муфтовый микровыключатель закрытия |
ЛО | Сигнальная лампа ОТКРЫТО |
ЛЗ | Сигнальная лампа ЗАКРЫТО |
П | Трехпозиционный переключатель |
ПО | Команда ОТКРЫТЬ |
ПЗ | Команда ЗАКРЫТЬ |
ПС | Команда СТОП |
Н | Нагревательный элемент |
С | Конденсатор |
F | Предохранитель |
ТС | Термореле электродвигателя |
Схема подключения электропривода ГЗ-ОФ(К), ГЗ-ОФ(М) к сети 3 х 380 В, 50 Гц
Обозначение
- 1.Внутренние соединения показаны внутри пунктирной линии, внешние соединения приведены для справочных целей.
- 2. Красным цветом обозначены дополнительные элементы, входящие в состав электропривода ГЗ-ОФ(М).
М | Электродвигатель |
1КВО | Конечный микровыключатель ОТКРЫТО |
1КВЗ | Конечный микровыключатель ЗАКРЫТО |
2КВО | Микровыключатель указателя положения ОТКРЫТО |
2КВЗ | Микровыключатель указателя положения ЗАКРЫТО |
1ВМО | Муфтовый микровыключатель открытия |
1ВМЗ | Муфтовый микровыключатель закрытия |
МО | Магнитный пускатель открытия |
МЗ | Магнитный пускатель закрытия |
ЛО | Сигнальная лампа ОТКРЫТО |
ЛЗ | Сигнальная лампа ЗАКРЫТО |
КО | Кнопка управления «Открыть» |
КЗ | Кнопка управления «Закрыть» |
КС | Кнопка управления «Стоп» |
Н | Нагревательный элемент |
F | Предохранитель |
БТ | Блок тепловой защиты |
ТС | Термореле электродвигателя |
|
Электроприводы для задвижек в системах водяного пожаротушения, клапаны сигнальные
Постоянный адрес страницы http://nemezida.su/electroprivod_zadvizhka.htm |
Структурные схемы электроприводов — Технарь
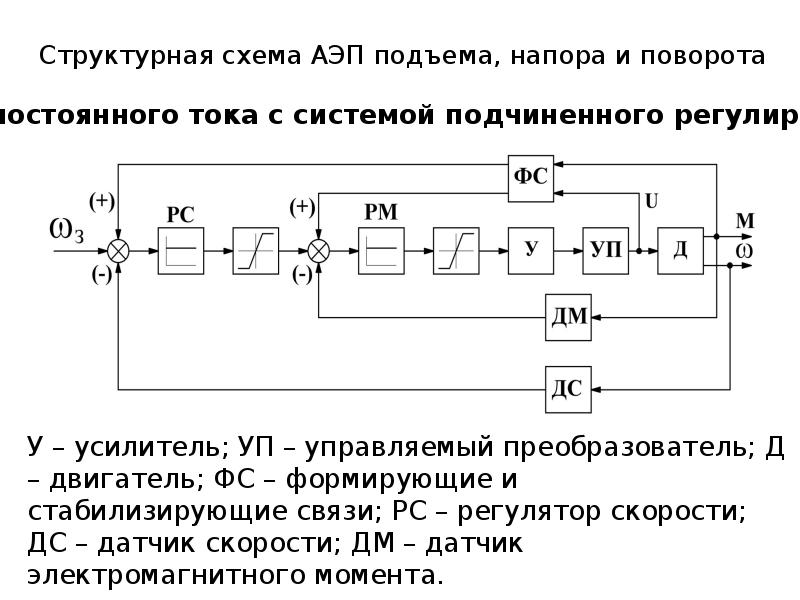
Структурные схемы электроприводов подач различаются видами преобразовательных и управляющих устройств (рис. 17).
Ступенчатое регулирование скорости стола С осуществляет редукторный электропривод (рис. 17, а), который содержит нерегулируемый асинхронный электродвигатель М переменного тока, связанный с ходовым винтом через редуктор с электромагнитными муфтами ЭМ1 и ЭМ2. Привод имеет программное управление от системы числового программного управления (СЧПУ), получающей сигналы от преобразователя пути (датчика обратной связи ДОС) через канал обратной связи ОС. В начале перемещения от СЧПУ включается электромагнитная муфта ЭМ1. Электродвигатель М приводит во вращение ходовой винт, и стол станка С начинает поступательно перемещаться; датчик обратной связи при повороте ходового винта дает соответствующее число импульсов. При подходе к точке останова СЧПУ подает сигнал на отключение электромагнитной муфты ЭМ1 и включение электромагнитной муфты ЭМ2, при этом через редуктор осуществляется медленное перемещение стола С и полное торможение электропривода. Этот электропривод применяют только в позиционных и прямоугольных системах числового программного управления.
Бесступенчатое регулирование скорости стола С осуществляется в регулируемом электроприводе (рис. 17, б). Электропривод содержит электродвигатель М постоянного тока с широким диапазоном бесступенчатого регулирования, который питается от мощного статического преобразователя П (например, тиристорного) и имеет программное управление от СЧПУ, получающей сигналы от преобразователя пути ДОС через канал обратной связи ОС. Электропривод применяют также только в позиционных и прямоугольных системах ЧПУ. Рассмотренные схемы электроприводов используют и в контурных системах ЧПУ, но при этом применяют следящее управление электроприводом. Схемы электроприводов, имеющие преобразователи перемещений ДОС, называют замкнутыми.
Шаговый электропривод (рис. 17, в) осуществляет ступенчатое (дискретное) перемещение стола С. Он содержит шаговый электродвигатель ШД малой мощности, гидроусилитель момента ГУМ, кинематическую пару винт—гайка, связанную со столом станка С. Шаговый электродвигатель при подаче от СЧПУ каждого командного импульса напряжения поворачивает свой вал на небольшой угол. Вследствие малой мощности шагового электродвигателя ШД его момент недостаточен для перемещения стола С. Поэтому он работает совместно с гидроусилителем момента ГУМ, который создан на основе аксиально-поршневого гидромотора. У этого гидромотора золотниковый распределитель соединен с валом электродвигателя. Таким образом, величина перемещения стола С определяется числом импульсов, поступивших от СЧПУ. Если электродвигатель отрабатывает все поступившие импульсы, то преобразователь перемещения не нужен. Такую систему называют разомкнутой.
Схема — электропривод — Большая Энциклопедия Нефти и Газа, статья, страница 1
Схема — электропривод
Cтраница 1
Схемы электропривода и электрооборудование экскаваторов мало отличаются друг от друга. [1]
Схема электропривода позволяет осуществлять различное управление двигателями насосов: автоматическое в зависимости от уровня воды в яме, дистанционное ( из диспетчерской), местное с помощью кнопок управления, расположенных непосредственно у насосов. [2]
Схема электропривода при дроссельном регулировании асинхронного двигателя ( рис. 3 — 30) относительно проста. Изменение направления вращения двигателя производится контакторами В и Я. [4]
Схема электропривода ( рис. 4.19) имеет два существенных недостатка. Во-первых, схема не позволяет использовать полную габаритную мощность установленного двигателя. Действительно, ток в якорной цепи, поддерживаемый на постоянном уровне, не может по условиям нагрева превысить номинального значения. Магнитный же поток в двигателях постоянного тока из-за насыщения магнитной системы также не увеличивают выше номинального значения. Поэтому в зоне нагрузок менее предельно допустимых по условиям коммутации, но выше номинальных рассматриваемый электропривод не может даже кратковременно обеспечить требуемых усилий. Во-вторых, при значительном снижении момента на валу двигателя ток в его якорной цепи остается значительным, вызывая неоправданные потери в якорной цепи и дополнительный нагрев двигателя. [5]
Схемы электроприводов как механизмов подъема, так и передвижения предусматривают электрическое торможение при переводе командоконтроллера в нулевое положение, а также при переходе с большой скорости на малую. Во всех этих случаях производится, как правило, переключение контакторов направления ( если двигатель работал в I или III квадрантах) и торможение по характеристике противовключения, соответствующей первому положению. На нулевом положении по истечении выдержки времени ( реле РП1, РП2 и РПЗ отключаются с запаздыванием) накладывается механический тормоз ТМ. [7]
Схема электропривода с маховиком дана на фиг. Всякий маховик характеризуется своим маховым моментом, к-рый обозначается обычно через GD и выражается в кем2 или в тмг. Если маховик не сидит непосредственно на валу рабочей маши — Фиг. [8]
Схема электропривода по структуре генератор-двигатель ( рис. 1.22) используется для регулирования частоты вращения рабочей машины. [9]
Схема электропривода обеспечивает регулирование трех координат: тока якоря двигателя, скорости и положения кабины. При этом основным режимом работы электропривода является регулирование скорости кабины лифта, а регулирование ее положения осуществляется лишь в режиме точной остановки лифта. Переключение режимов работы электропривода осуществляется автоматически с помощью реле КА, обмотка которого на рис. 4 не показана, при входе кабины в зону точной остановки. [10]
Схема электропривода двух согласованно движущихся конвейеров приведена на рис. 4.9. Приводные асинхронные двигатели Ml и М2 конвейеров включены по схеме двойного питания, в которой цепь статорных обмоток соединена с сетью напряжением стандартной частоты Д, а к зажимам роторных обмоток подводится напряжение с частотой / 2 от преобразователя частоты ПЧ. [11]
Схемы электроприводов, осуществляющие позиционирование с датчиками положения, показаны в разд. В резисторных электроприводах постоянного тока при питании от сети снижение скорости перед остановкой при позиционировании осуществляется по схеме шунтирования якоря ( см. разд. В разисторных асинхронных электроприводах многоскоростные двигатели датчиком ДИЗ переключаются на пониженную скорость, а в односкоростных используется схема включения динамического торможения ( см. разд. При работе двух двигателей с фазными роторами на один вал пониженная скорость обеспечивается переводом одного из двигателей в режим динамического торможения. [12]
Схемы электропривода с асинхронными электродвигателями весьма разнообразны, в то же время управление этими электродвигателями относительно несложно. [13]
Схема электропривода тяги аналогична схеме подъема. Схема привода поворота предусматривает регулирование стопорного момента по положениям командоконтроллера в широких пределах при малоизменяющейся скорости холостого хода. Здесь в отличие от схемы привода подъема цепи задающей и токовой обмотки разделены. [15]
Страницы: 1 2 3 4 5
Кинематическая схема электропривода — Студопедия
Непосредственное представление о механических связях даёт кинематическая схема электропривода (рис. 2.2):
Рис. 2.2. Кинематическая схема электропривода
Здесь двигатель Д через соединительную муфту СМ1, клиноременную передачу (КРП), ряд зубчатых передач ЗПi и соединительную муфту СМ2 приводит во вращение барабан (Б), преобразующий вращательное движение в поступательное движение ряда связанных масс. При нагружении элементы системы (валы, опоры, клиноременные передачи, зубчатые зацепления и т.п.) деформируются, т. к. механические связи не являются абсолютно жёсткими. При изменении нагрузки массы имеют возможность взаимного перемещения, которое определяется жёсткостью связи.
Каждый вращательно движущийся элемент обладает моментом инерции Ji и связан с (i+1) — элементом механической связью, обладающей жёсткостью Ci. Соответственно каждый поступательно движущийся элемент имеет массу mj и связан со следующим связью с жёсткостью Сj. В пределах механических связей, для которых выполняется закон Гука, жёсткости можно определить с помощью соотношений
(2.1)
где
— нагрузка упругой механической связи;
— деформация упругого элемента при вращательном и поступательном движении.
В связи с наличием передач различные элементы системы движутся с различными скоростями. Поэтому для составления расчетных схем необходимо приведение всех параметров элементов кинематической цепи к одной расчётной скорости, обычно к скорости вала двигателя.
Условием соответствия расчётной схемы реальной механической системе является выполнение закона сохранения энергии. При приведении необходимо обеспечить сохранение кинетической и потенциальной энергий системы, а также элементарной работы всех действующих в системе сил и моментов на возможных перемещениях. Следовательно,
(2.2)
Отсюда получаем формулы приведения:
(2.3)
где
— передаточное число от вала приведения до i-го вала;
— радиус приведения к валу со скоростью ω 1 .
При приведении вращательных φi и поступательных Sj перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением скоростей. Тогда перемещения связаны зависимостями:
При линейных кинематических связях . В этом случае формулы приведения перемещений имеют вид:
При приведении жёсткостей механических связей должно выполняться условие равенства запаса потенциальной энергии деформации.
Потенциальная энергия Wn равна работе, совершаемой моментом М на участке изменения угла Δφ. Так как величина момента скручивания изменяется от 0 до Mmax, то, с учетом (2.1), работа равна:
Тогда
Формулы приведения:
(2.4)
Приведение моментов и сил нагрузки элементов кинематической цепи должно осуществляться при условии равенства элементарной работы на возможных перемещениях:
Следовательно,
(2.5)
Для большей наглядности сопоставления по результатам приведения можно построить исходную приведённую расчётную схему, представив в ней массы в виде прямоугольников, площадь которых пропорциональна приведенным моментам инерции, а жёсткости связей между ними в виде соединений, длина которых обратно пропорциональна жёсткости.
Для рассматриваемой кинематической схемы приведённая расчётная схема имеет вид (рис. 2. 3):
Рис. 2.3. Приведённая расчётная схема кинематической цепи.
В ней выделены три наиболее значительные массы – ротор двигателя с моментом инерции , барабан с приведённым моментом инерции и груз . Вследствие относительно малых величин остальных моментов её можно существенно упростить. Для этого следует малые массы добавить к близлежащим большим, а затем определить эквивалентные жёсткости связей между полученными массами по общей формуле:
(2.6)
К ротору двигателя с моментом инерции приложен электромагнитный момент М и момент потерь ΔМ, причём для правильного учёта знаков действующих моментов указано положительное для всей приведённой схемы направление скорости ω 1 .
Исследования динамики электропривода показывают, что неразветвлённые расчётные механические схемы в большинстве случаев сводятся к трёхмассовой (рис. 2.4а), двухмассовой (рис. 2.4б) расчётным схемам и к жёсткому приведённому механическому звену (рис. 2.4в):
а) б) в)
Рис. 2.4. Расчётные схемы электропривода: трёхмассовая (б) и жёсткое приведённое механическое звено (в).
Трёхмассовая упругая система используется в тех случаях, когда необходимо более детально анализировать движения масс механизма. При этом обычно используется моделирование на аналоговой (ABM) или цифровой (ЦВМ) вычислительных машинах. Для исследования отдельных физических особенностей используется двухмассовая система.
В тех случаях, когда параметры системы таковы, что влияние упругих связей незначительно, или когда этим влиянием можно пренебречь, используется жёсткое приведённое звено. Суммарный приведённый момент инерции может быть выражен:
(2.7)
где
n и k – число масс установки, совершающих соответственно вращательное и поступательное движение.
Суммарный приведённый к валу двигателя момент статической нагрузки MC
(2.8)
где
q и p – число внешних моментов Mi и сил , приложенных к системе, кроме электромагнитного момента двигателя.
Характерным примером разветвлённых кинематических схем является кинематическая схема многодвигательного электропривода, в котором двигатели через индивидуальные редукторы действуют на общий рабочий механизм.
4 К механической части электропривода относятся вращающаяся часть двигателя, механическое передаточное устройство и рабочий орган технологической машины.
Вращающая часть двигателя (якорь или ротор) служит источником механической энергии.
С помощью МПУ осуществляется преобразование вращательного движения двигателя в поступательное движение рабочего органа ТМ или за счёт изменения соотношения скоростей входного и выходного валов МПУ согласовываются скорости вращения двигателя и рабочего органа. В качестве МПУ могут использоваться цилиндрические и червячные редукторы, планетарная передача, пара винт – гайка, кривошипно-шатунная, реечная, ременная и цепная передачи.
Рабочий орган ТМ является потребителем механической энергии, которую он преобразует в полезную работу. К числу рабочих органов можно отнести шпиндель токарного или сверлильного станка, движущую часть конвейера, ковш экскаватора, кабину лифта, винт теплохода и др.
Элементы механической части ЭП связаны друг с другом и образуют кинематическую цепь, каждый элемент которой имеет свою скорость движения, характеризуется моментом инерции или инерционной массой, а также совокупностью действующих на него моментов или сил. Механическое движение любого из элементов определяется вторым законом Ньютона. Для элемента, вращающегося вокруг неподвижной оси уравнение движения имеет вид:
где – векторная сумма моментов, действующих на элемент;
J – момент инерции элемента;
– угловое ускорение вращающегося элемента.
Для поступательно движущегося элемента уравнение движения имеет вид:
,
где – векторная сумма сил, действующих на элемент;
m – инерционная масса элемента;
– линейное ускорение поступательно движущегося элемента.
С помощью этих уравнений может быть учтено взаимодействие любого элемента с остальной частью кинематической цепи. Это удобно осуществлять путём приведения моментов и усилий, а также моментов инерции и инерционных масс. В результате этой операции (приведения) реальная кинематическая схема заменяется расчётной, энергетически эквивалентной схемой, основу которой составляет тот элемент, движение которого рассматривается. Как правило, этим элементом является вал двигателя М. Это позволяет наиболее полно исследовать характер движения электропривода и режим его работы. Зная параметры кинематической схемы, можно определить и вид движения рабочего органа технологической машины.
Приведение моментов сопротивления от одной оси вращения к другой производится на основании баланса мощности в системе.
В ходе технологической операции рабочий орган, вращающийся на своей оси со скоростью ωм и создающий момент сопротивления Мсм, потребляет мощность Рм=Мсмωм. Потери мощности в МПУ учитываются делением величины Рм на к.п.д. передачи ηп. Эту мощность обеспечивает двигатель, вращающийся со скоростью ω и развивающий момент Мс, равный приведенному к оси вращения вала двигателя моменту сопротивления Мсм. На основании равенства мощностей получим:
.
Тогда выражение для определения приведенного момента сопротивления Мс имеет вид:
,
где – передаточное число МПУ.
Приведение сил сопротивления производится аналогично. Если скорость поступательного движения рабочего органа ТМ равна υм и в ходе технологической операции создаётся сила сопротивленияFсм, то с учётом к.п.д. МПУ уравнение баланса мощностей будет иметь вид:
.
Приведенный момент сопротивления Мс будет равен:
,
где – радиус приведения МПУ.
Каждый из вращающихся элементов кинематической схемы характеризуется моментом инерции Jі.Приведение моментов инерции к одной оси вращения основано на том, что суммарный запас кинетической энергии движущихся частей привода, отнесённый к одной оси, остаётся неизменным. При наличии вращающихся частей, обладающих моментами инерции Jд, J1, J2, … Jnи угловыми скоростями ω, ω1, ω2, … ωn можно заменить их динамическое действие действием одного элемента, обладающего моментом инерции J и вращающегося со скоростью ω.
В таком случае можно записать уравнение баланса кинетической энергии:
.
Суммарный момент инерции, приведенный к валу двигателя будет равен:
,
где Jд – момент инерции ротора (якоря) М;
J1, J2, … Jn – моменты инерции остальных элементов кинематической схемы.
Приведение инерционных масс m, движущихся поступательно, осуществляется также на основании равенства кинетической энергии:
,
отсюда момент инерции, приведённый к валу двигателя будет равен:
.
В результате выполнения операций приведения реальная кинематическая схема заменяется расчётной, энергетически эквивалентной схемой. Она представляет собой тело, вращающееся на неподвижной оси. Этой осью является ось вращения вала двигателя. На него действуют вращающий момент двигателя М и приведенный момент сопротивления Мс. Вращается тело со скоростью двигателя ω и обладает приведенным моментом инерции J.
В теории электропривода такая расчётная схема получила название одномассовой механической системы. Она соответствует механической части АЭП с абсолютно жёсткими элементами и без зазоров.
Электроприводы станков —
Электроприводы с асинхронными двигателями. Большая группа станков самого различного назначения базируется на асинхронном электроприводе без электрического регулирования частоты вращения или с электрическим при использовании двух-, трехскоростных асинхронных двигателей, в том числе в сочетании с коробками скоростей. Схемы автоматизации таких электроприводов, как правило, просты и содержат контакторно-логическую часть, которая выполняет функции последовательности включения, защиты и другие функции.
В качестве примера рассмотрим схему автоматизации токарно-винторезного станка (рис. 11.4). Главное движение (вращение шпинделя) и движение подачи (перемещение резца) осуществляется с помощью асинхронного двигателя с короткозамкнутым ротором Ml.
Частота вращения шпинделя ступенчато изменяется вариатором и коробкой скоростей. При нарезании резьбы суппорт и резец двигаются при помощи ходового винта с приводом от электродвигателя Ml. Система охлаждения состоит из бачка с центробежным насосом с приводом от асинхронного двигателя М2. Местное освещение осуществляется от электролампы накаливания EL. на напряжение 36 В. Напряжение на рабочие цепи подается выключателем S.
При нажатии на кнопку SB2 подается питание на катушку пускателя КМ1 через нормально замкнутые контакты SB1.1, SB3.2, и электродвигатель Ml будет вращаться «вправо». При нажатии на кнопку SB1 контактом SB1.1 разрывается цепь питания пускателя КМ1, а контактом SB 1.2 включается пускатель КМ2, выполняющий своими контактами индукционно-динамическое торможение двигателя за счет подачи контактом КМ2.2 пульсирующего (постоянного) тока в обмотку двигателя.
При нажатии кнопки SB3 включается вращение двигателя Ml «влево» с помощью пускателя КМЗ.
Контакты КМ 1.1 и КМ3.1 пускателей КМ1 и КМЗ подготавливают к включению катушку пускателя КМ4, и при нажатии кнопки SB4 можно включить двигатель охлаждения М2.
Схема автоматизации двухшпиндельного сверлильного станка приведена на рис. 11.5. Станок имеет два асинхронных короткозамкнутых двигателя Ml и М2 привода головок. Подача на станке гидравлическая. Масляные насосы гидроподачи приводятся в движение от двигателей соответствующих головок. Управление клапанами гидропривода осуществляется электромагнитами.
Схема управления предусматривает режимы работы двух или любого из двух двигателей в отдельности. Режим работы устанавливается с помощью переключателей SA1. SA2, SA3. Для работы двух головок переключатели SA1. SA2, ставят в верхнее положение и нажимают кнопку SB1 — «Пуск». При этом в цепи фазы С (SA1—SB1—SB2- SA2получают питание катушки контакторов КМ1 и КМ2. Главные контакторы К Ml и К М2 включают двигатели в работу, а вспомогательный контакт КМ2.1 шунтирует кнопку SB1. После этого нажимают кнопку SB3 одновременной подачи «Вперед», что вызывает срабатывание контактора КМЗ и через контакты КМ3.1 и путевые выключатели SQ1, SQ2 получают питание электромагниты подачи YA1 и У/12. которые открывают клапаны гидроподачи. Шпиндели головок начнут перемещаться к изделию с увеличенной по сравнению с рабочей скоростью. При соприкосновении сверл с изделием происходит нажатие на головки, которые механически соединены с клапанами регулирующими подачу масла в гидросистему, поэтому скорость подачи снизится до рабочей.
После окончания сверления и ослабления нажатия на головки специальные кулачки откроют клапаны ускоренного обратного хода и головки вернутся в исходное положение. Если необходимо вернуть в исходное положение головку до окончания сверления, нажимают кнопку SB4, которая своим контактом включит контактор КМ4. а последний своими контактами КМ4.1, КМ4.2 включит электромагниты клапанов обратного хода.
При раздельном управлении головками переключатель SA1 и переключатели нужного двигателя SA2, ставят в нижнее положение. В результате получат питание катушки соответствующего контактора КМ1 или К М2 и тот или иной двигатель будет подключен к сети. Гидроприводами подачи управляют при помощи кнопок SB5 и SB6.
Электроприводы с двигателями переменного и постоянного тока.
Определенная группа станков, например фрезерные, могут иметь одновременно электроприводы переменного и постоянного тока, что диктуется условиями технологии. На схеме управления вертикальнофрезерным станком (рис. 11.6) привод шпинделя станка осуществляется от короткозамкнутого асинхронного двигателя Ml, а привод подачи — от двигателя постоянного тока М2. Двигатели для систем смазочной и охлаждения на схеме не приведены.
Асинхронный двигатель Ml реверсируют вручную с помощью переключателя 5/4. При нажатии кнопки SB2 («Пуск») получает питание катушка магнитного пускателя КМ1, и двигатель Ml подключается к сети силовыми контакторами КМ1. Вспомогательный контакт КМ 1.1 шунтирует контакты SB2.1, одновременно включает катушку промежуточного реле KLI, а контакты КМ1.2 обесточивают катушку тормозного контактора КМ2.
При нажатии кнопки SB1 цепь управления обесточивается, схема возвращается в исходное состояние и пока замкнуты контакт SB1 получает питание катушка тормоза КМ2 через контакты SB1.2 и происходит динамическое торможение двигателя Ml подключением пульсирующего тока к фазам Cl, В1 через контакты КМ2.2, КМ2.3.
Обмотка якоря М2 получает выпрямленный ток от устройства, выполненного на магнитных усилителях (МУ): LR1 — силовая обмотка, LR2 — задающая обмотка, LR3 — обмотка смещения.
Частота вращения двигателя М2 плавно регулируется с помощью потенциометра R1. В цепи обмотки возбуждения LM2 установлен резистор R2, который шунтируется контактом реле напряжения KV1.1. Если ток в обмотке LM2 снизится менее допустимого, то контакт KL3.I разомкнется и отключит двигатель М2. Катушка реле KL3 осуществляет защиту «обрыва поля». Контакт KL3.1 шунтирует кнопку SB2.2.
Для быстрого перемещения суппорта кнопкой SB5 подается питание на промежуточное реле KL2 последнее включает прямую задающую обмотку МУ LR2 и замыкает контакты в цепи катушки KV— KL2.3. Реле KV сработает, разомкнет контакты KV1.1 и введет добавочное сопротивление R2 в цепь обмотки возбуждения LR2. Таким образом, замыкание контактов SB5 приводит к увеличению тока в задающей обмотке МУ LR2, увеличивает насыщение и напряжение на выводах МУ, а введение R2 приводит к уменьшению потока двигателя М2, что в совокупности позволяет осуществить плавное электрическое регулирование в пределах 20 : 1.
Электропривод постоянного тока. Электропривод постоянного тока рассмотрим на примере электропривода серии ЭТ6, предназначенного для регулирования и стабилизации частоты вращения двигателя постоянного тока в диапазоне 10 000: 1.
Электропривод (рис. 11.7, а) представляет собой электромеханическое устройство, состоящее из электродвигателя М, регуляторов скорости PC и тока РТ, датчиков скорости ДС и тока ДТ, тиристорного преобразователя ТП, а также узлов зависимости токоограничения (/то = / (п), ограничения минимального угла управления U0TP —
Электропривод работает следующим образом. При наличии рассогласования kU1 = U3 — Uдс на входе PC на его выходе формируется сигнал, пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря /я, поступает на вход РТ. Регулятор РТ усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов (СИФУ), функция которой заключается в формировании и распределении импульсов управления силовыми тиристорами. По мере уменьшения рассогласования под действием отрицательной обратной связи по частоте вращения происходит стабилизация вращения двигателя до уровня, соответствующего Ua.
Тиристорный преобразователь является управляемым двухиоляр- ным шестиимпульсным выпрямителем (рис. 11.7,6). Регуляторы PC и РТ с их корректирующими цепями обеспечивают необходимые показатели электропривода в статике и динамике. Регулятор скорости представляет собой многокаскадный усилитель постоянного тока с цепями обратной связи, собранный на микросхемах. В схеме предусмотрена термостабильность благодаря компенсации теплового дрейфа усилителей. Для подстройки блока имеются цепи подстроек с резисторами.
Регулятор тока выполнен на операционном усилителе и представляет собой пропорционально-интегральный регулятор. Блок содержит элементы коррекции токового контура, которые подбираются при наладке.
Датчик тока предназначен для передачи на вход регулятора тока сигнала обратной связи пропорционально току якоря электродвигателя. Датчик тока выполнен на основе магнитодиодов. В контур регулятора тока якоря входит схема ограничения производной, которая осуществляет ограничение большого значения производной напряжения на входе РТ для исключения динамического уравнительного тока. Схема ограничения производной собрана на операционном усилителе с дифференцирующей цепочкой.
Схема ограничения минимального угла управления предназначена для исключения превышения напряжения на входе РТ амплитудой опорного напряжения в динамических режимах и при изменении напряжения питающей сети.
Схема ограничения тока якоря обеспечивает в зависимости от настройки ограничение тока якоря на заданном уровне и зависимое ограничение тока в функции частоты вращения. Принцип работы токоограничителя основан на ограничении входного напряжения регулятора скорости, которое пропорционально току якоря.
Схема защиты выполняет функции защиты электропривода от неправильного чередования фаз питающей сети, обрыва любой из фаз, исчезновения стабилизированного питания любой полярности и перегрева электродвигателя.
Источник питания собран по схеме двухканального стабилизатора, обеспечивает питание всех цепей управления постоянным стабилизированным напряжением.
Электропривод постоянного тока с реверсированием поля. Примером такого электропривода является серия ЭТРП. Его функциональная схема (рис. 11.8) несколько отличается от функциональной схемы электропривода ЭТ6 наличием тиристорного преобразователя питания якоря ТПЯ, тиристорного преобразователя питания обмотки возбуждения ТПВ и тиристорного реверса БР обмотки возбуждения. БФИ1, БФИ2 — блоки формирования импульсов в каналах управления якорем и возбуждения; БУР — блок управления реверсом; РЭ — релейный элемент.
Электропривод с тиристорным широтно-импульсным преобразователем. В качестве примера рассмотрим электропривод серии ЭШИР-1 (рис. 11.9, а).
Электропривод питается через силовой трансформатор от трехфазной сети переменного тока через трехфазный мостовой выпрямитель VD1—VD6 с емкостным фильтром на выходе (рис. 11.9, б).
Электродвигатель М подключается к источнику постоянного напряжения силовыми ключами Ql—Q4. Порядок и продолжительность включения определяют направление и частоту вращения двигателя, скважность импульсов — среднее напряжение на двигателе.
Сигнал рассогласования между заданной и фактической частотами вращения усиливается регулятором скорости PC и подается на вход регулятора тока РТ. Далее сигнал поступает на ШИМ1 и ШИМ2, где происходит сравнение этого сигнала с пилообразным напряжением генератора пилообразного напряжения ГПН. На вход РТ подаются сигналы с датчика тока UA1 с выхода устройства токоограничения UАО и датчика статического тока IIА2. Сигнал, поступающий с UA1 на вход РТ, обеспечивает отрицательную обратную связь по току двигателя. При превышении этим током заданного значения /отс срабатывает устройство токоограничения UAO, в результате резко возрастает коэффициент обратной связи по току и ограничивается дальнейший рост тока.
Датчик статического тока UA2 выдает сигнал, пропорциональный моменту нагрузки и компенсирующий влияние этого момента. На его вход помимо сигнала с UA1 подается сигнал, пропорциональный производной частоте вращения, полученный дифференцированием сигнала с тахогенератора ВР.
С выхода ШИМ биполярный сигнал поступает через узлы задержки 1—4, и на выходе сигналы оказываются раздвинутыми на постоянный интервал А, что позволяет уменьшить сквозной ток. Для гальванической развязки схемы управления и силовых ключей служат узлы гальванической развязки ER.
Силовые ключи включаются через импульсные усилители AV.
Помимо собственного силового ключа, в каждом блоке силовых ключей установлены два диода VD8—VD9 и два вспомогательных диода VD10—VD11, связанных с установкой индуктивности LI—L2 между ключами вертикали. Индуктивности нужны для ограничения сквозных токов при противофазном управлении ключами.
Привод имеет защиту от перенапряжения, выполненную на диоде VD12 разрядного ключа Q5.
Что такое электронные моторные приводы | Конструкция машины
Дэйв Полька
Группа приводов и силовых агрегатов
ABB Inc.
Нью-Берлин, Висконсин,
|
Привод ACS 160 от ABB спроектирован как модульный блок для настенного монтажа и установки на двигателе согласно IEC. Микропривод NEMA-4X (IP65) подходит для приложений, где требуется надежная и эффективная работа двигателя в опасных или загрязненных средах.Он реагирует на изменения входного сигнала всего за 5 мсек, охватывает диапазон от 0,5 до 3 л.с. и диапазон входного напряжения от 380 до 500 В переменного тока для трех фаз. |
|
Ротор и статор работают за счет магнитного взаимодействия. Число полюсов и применяемая частота определяют скорость. |
|
Привод обеспечивает много разных частотных выходов.Любая заданная частота на выходе привода создает уникальную кривую крутящего момента. |
|
Плата управления приводом сигнализирует схемам управления, чтобы включить положительную или отрицательную половину силового устройства. Чередование положительных и отрицательных переключателей воссоздает трехфазный выход. Чем дольше устройство остается включенным, тем выше выходное напряжение. Чем дольше он выключен, тем ниже выходная частота. |
|
Выходной сигнал привода не является точной копией синусоидальной формы входного переменного тока. Вместо этого он обеспечивает импульсы напряжения постоянной величины. |
|
Все приводы с ШИМ содержат входной преобразователь, шину постоянного тока и выходной инвертор. Для простоты показаны только одна фаза входа и выхода для трехфазного привода. |
Выбор правильного привода важен для получения максимальной производительности и эффективности от электродвигателя. Моторный привод управляет скоростью, крутящим моментом, направлением и результирующей мощностью двигателя. Приводы постоянного тока обычно управляют двигателем постоянного тока с параллельной обмоткой, который имеет отдельные цепи якоря и возбуждения. Приводы переменного тока управляют асинхронными двигателями переменного тока и, как их аналоги постоянного тока, регулируют скорость, крутящий момент и мощность.
Например, возьмем простое приложение двигателя с фиксированной скоростью, приводящего в движение вентилятор.Замена трехфазного пускателя двигателя на частотно-регулируемый привод (VFD) позволяет вентилятору работать с регулируемой скоростью. Одним из преимуществ является экономия энергии, поскольку система изменяет воздушный поток, регулируя скорость двигателя, а не с помощью заслонки на выходе воздуха.
Основные сведения о приводе
Привод может управлять двумя основными выходами трехфазного асинхронного двигателя: скоростью и крутящим моментом. Чтобы понять, как привод управляет этими двумя элементами, давайте взглянем на индукционные двигатели. Две основные части двигателя, ротор и статор, работают за счет магнитного взаимодействия.Двигатель содержит пары полюсов — железные компоненты в статоре, намотанные по определенной схеме для создания магнитного поля с севера на юг.
Когда одна пара полюсов изолирована в двигателе, ротор (вал) вращается с определенной скоростью, базовой скоростью. Количество полюсов и применяемая частота определяют эту скорость. Частота вращения вала, V , находится из
В = 120 F ⁄ P — S
где F = частота, приложенная к двигателю, P = количество полюсов двигателя и S = скольжение.
Скольжение — это разница между скоростью ротора и вращающимся магнитным полем в статоре. Когда магнитное поле проходит через проводники ротора, ротор принимает собственные магнитные поля. Эти магнитные поля ротора пытаются поймать вращающиеся поля статора. Однако они никогда не делают этого, и эта разница скользкая. Думайте о скольжении как о расстоянии между борзыми и зайцем, которого они гонят по следу. Пока они не догонят зайца, они будут продолжать вращаться вокруг следа.Скольжение — это то, что позволяет двигателю вращаться.
Например, скольжение двигателя NEMA-B составляет от 3 до 5% от базовой скорости, что составляет 1800 об / мин при полной нагрузке. Скорость вала в этом случае будет V = 120 (60) ⁄4 — 54 = 1746 об / мин.
Удобный и экономичный метод регулировки скорости — это изменение частоты, подаваемой на двигатель. Изменение числа полюсов также изменит скорость двигателя, но это физическое изменение потребует перемотки двигателя и приведет к ступенчатому изменению скорости.
Отношение напряжения к частоте (В / Гц) определяет крутящий момент двигателя. Изменение этого отношения изменяет крутящий момент двигателя. Например, асинхронный двигатель, подключенный к источнику 460 В, 60 Гц, имеет коэффициент передачи 7,67. Пока это соотношение остается постоянным, двигатель развивает номинальный крутящий момент. Привод обеспечивает множество различных частотных выходов и, следовательно, множество различных кривых крутящего момента.
Скорость изменения
Давайте теперь посмотрим, как привод обеспечивает выходную частоту и напряжение, необходимые для изменения скорости двигателя.Все приводы с ШИМ содержат входной преобразователь, шину постоянного тока и выходной инвертор, с небольшими различиями в аппаратном и программном обеспечении от одного продукта к другому. В небольших частотно-регулируемых приводах один блок питания может содержать преобразователь и инвертор.
Хотя некоторые приводы принимают однофазную входную мощность, мы сосредоточимся на трехфазном приводе. Но чтобы упростить прилагаемую иллюстрацию, формы сигналов на рисунках приводов показывают только одну фазу входа и выхода.
Входной частью привода является преобразователь.Он содержит шесть диодов, объединенных в электрический мост. Диоды преобразуют мощность переменного тока в мощность постоянного тока. Следующий раздел — шина постоянного тока — видит фиксированное напряжение постоянного тока.
Шина постоянного тока фильтрует и сглаживает форму волны. Диоды фактически реконструируют отрицательные половины формы волны на положительную половину. В устройстве на 460 В среднее напряжение шины постоянного тока составляет от 650 до 680 В, рассчитанное как линейное напряжение, умноженное на 1,414. Катушка индуктивности (L) и конденсатор (C) работают вместе, чтобы отфильтровать любую переменную составляющую сигнала постоянного тока.Чем плавнее форма сигнала постоянного тока, тем чище форма сигнала на выходе привода.
Шина постоянного тока питает инвертор, последнюю секцию привода. Как следует из названия, эта секция инвертирует постоянное напряжение обратно в переменное. Но это происходит с выходом переменного напряжения и частоты. Как это происходит, зависит от того, какие устройства питания использует привод.
Коммутация с IGBT
Довольно задействованная схема управления координирует переключение силовых устройств, обычно через плату управления, которая определяет включение силовых компонентов в правильной последовательности.Микропроцессор или цифровой сигнальный процессор (DSP) отвечает всем требованиям внутренней логики и решений.
Старые диски были на основе SCR. SCR (первоначально называемый тиристором) содержит элемент управления, называемый затвором. Затвор действует как переключатель включения, который позволяет устройству полностью проводить напряжение, пока полярность не изменится, а затем оно автоматически отключается. Специальная схема, обычно требующая другой монтажной платы и соответствующей проводки, управляет этим переключением.
Технология биполярных транзисторов начала вытеснять SCR в приводах в середине 1970-х годов. В начале 1990-х они уступили место использованию технологии биполярных транзисторов с изолированным затвором (IGBT). БТИЗ включают и выключают шину постоянного тока через определенные промежутки времени. При этом инвертор фактически создает переменное переменное напряжение и частоту на выходе.
Выходной сигнал привода не обеспечивает точную копию синусоидальной формы входного переменного тока, как показано на рисунке «Выход ШИМ». Вместо этого он выдает импульсы напряжения постоянной величины.Плата управления привода сигнализирует схемам управления силового устройства, чтобы включить положительную или отрицательную половину формы сигнала силового устройства. Это чередование положительного и отрицательного переключателей воссоздает трехфазный выход. Чем дольше устройство остается включенным, тем выше выходное напряжение. Чем меньше времени включено питание устройства, тем ниже выходное напряжение. И наоборот, чем дольше устройство выключено, тем ниже выходная частота.
Скорость, с которой включаются и выключаются силовые устройства, является несущей частотой, также известной как частота переключения.Чем выше частота переключения, тем большее разрешение содержит каждый импульс ШИМ. Типичные частоты переключения составляют от 3000 до 4000 раз в секунду (от 3 до 4 кГц). Старые приводы на базе SCR имеют частоту переключения от 250 до 500 Гц. Очевидно, что чем выше частота переключения, тем более гладкая форма выходного сигнала и выше разрешение. Однако более высокие частоты переключения снижают эффективность привода из-за повышенного нагрева силовых устройств.
Диски различаются по сложности, но каждое новое поколение имеет тенденцию предлагать улучшенную производительность в меньших корпусах.Тенденция аналогична тенденции персональных компьютеров. Однако, в отличие от ПК, надежность и простота использования дисков значительно повысились. Кроме того, в отличие от компьютеров, типичный привод сегодняшнего дня не излучает беспричинные гармоники в систему распределения — и не влияет на коэффициент мощности. Диски все чаще становятся «подключи и работай». По мере того как электронные силовые компоненты становятся меньше и надежнее, стоимость и размер частотно-регулируемых приводов будут продолжать снижаться, а производительность и простота использования будут только улучшаться.
|
ОБСЛУЖИВАНИЕ ПЧ
Преобразователь частоты — это в основном компьютер и источник питания.Поэтому примените к частотно-регулируемым приводам те же меры предосторожности, что и к этим устройствам, чтобы обеспечить безотказную работу в течение многих лет. Требования к техническому обслуживанию делятся на три основные категории. Держите его в чистоте. Большинство частотно-регулируемых приводов относятся к категории NEMA-1 (боковые вентиляционные отверстия для охлаждающего воздуха) или NEMA 12 (герметичный пыленепроницаемый корпус). Приводы NEMA-1 подвержены загрязнению пылью. Пыль на оборудовании может ограничивать воздушный поток, снижая производительность радиаторов и циркуляционных вентиляторов. Пыль на электронных устройствах может привести к неисправности или поломке.Пыль впитывает влагу, что тоже способствует выходу из строя. Периодическое распыление воздуха через вентилятор радиатора является хорошей профилактической мерой. Подача сжатого воздуха в частотно-регулируемый привод является жизнеспособным вариантом в некоторых средах, но типичный производственный воздух содержит масло и воду. Чтобы использовать сжатый воздух для охлаждения, он должен быть сухим и обезжиренным, иначе он принесет больше вреда, чем пользы. Для этого требуется специализированная, специализированная и дорогая подача воздуха. Это на практике все еще существует риск возникновения электростатических зарядов и электростатических разрядов.Нестатический спрей или вакуум ESD обратного действия уменьшат накопление статического электричества. Обычные пластмассы являются основными генераторами статического электричества. Вакуумные корпуса и вентиляторы ESD изготовлены из особого нестатического пластика. Эти пылесосы и баллоны со сжатым воздухом, не генерирующим статическое электричество, можно приобрести у специалистов по статическому оборудованию. Держите его сухим. Платы управления , находящиеся во влажной среде, могут со временем подвергнуться коррозии, поэтому держите очевидные источники влаги подальше от частотно-регулируемого привода.Некоторые производители включали тип «защиты от конденсации» в более ранние VFD. Когда температура упадет ниже 32F, программная логика не позволит приводу запуститься. Сегодня частотно-регулируемые приводы редко предлагают такую защиту. При работе с ЧРП весь день, каждый день обычное лучистое тепло от радиатора должно предотвращать конденсацию. Если агрегат не находится в непрерывном режиме работы, используйте кожух NEMA-12 и обогреватель с термостатическим управлением, если размещаете агрегат там, где вероятна конденсация. Держите соединения плотными. Хотя это звучит банально, проверка соединений — это шаг, который многие люди пропускают или делают неправильно, и это требование применяется даже к чистым помещениям. Циклы нагрева и механическая вибрация могут привести к нестандартным соединениям, как и стандартные методы работы с PM. Повторная затяжка винтов не рекомендуется, поскольку дальнейшая затяжка уже затянутого винта может испортить хорошее соединение. Если винты просто ослабли, попробуйте снова затянуть. Плохие соединения в конечном итоге приводят к возникновению дуги. Возникновение дуги на входе частотно-регулируемого привода может привести к нежелательным ошибкам из-за перенапряжения, отключению входных предохранителей или повреждению защитных компонентов.Возникновение дуги на выходе частотно-регулируемого привода может привести к перегрузкам по току или даже к повреждению силовых компонентов. Ослабленная проводка управления может вызвать неустойчивую работу. Например, ослабленный сигнальный провод пуска / останова может привести к неконтролируемой остановке частотно-регулируемого привода. Ослабленный провод задания скорости может вызвать колебания скорости привода, что приведет к браку, повреждению машины или травмам персонала. Дополнительные шаги. Не упускайте из виду внутренние компоненты частотно-регулируемого привода при механической проверке. Проверьте циркуляционные вентиляторы на наличие признаков неисправности подшипников или посторонних предметов, на которые обычно указывают необычный шум или шатающиеся валы.Осмотрите конденсаторы шины постоянного тока на предмет вздутия и утечки. Либо это может быть признаком напряжения компонентов или неправильного использования электричества. Измерьте напряжение во время работы частотно-регулируемого привода. Колебания напряжения на шине постоянного тока могут указывать на износ конденсаторов шины постоянного тока. Одна из функций конденсаторной батареи — действовать как секция фильтра, сглаживая любые пульсации переменного напряжения на шине. Аномальное напряжение переменного тока на шине постоянного тока указывает на неисправность конденсаторов. Большинство производителей частотно-регулируемых приводов имеют специальные клеммные колодки для этого типа измерений, а также для подключения к резисторам динамического торможения.Более 4 В переменного тока может указывать на проблему с конденсаторной фильтрацией или возможную проблему с секцией преобразователя диодного моста (перед шиной). В таких случаях проконсультируйтесь с производителем ЧРП, прежде чем предпринимать дальнейшие действия. Когда частотно-регулируемый привод находится в состоянии пуска и на нулевой скорости, выходное напряжение должно составлять 40 В перем. Тока между фазами или меньше. Более высокие значения могут указывать на утечку транзистора. При нулевой скорости силовые компоненты не должны работать. Если показания превышают 60 В переменного тока, следует ожидать отказа силового компонента. Регулярно следите за температурой радиатора. Большинство производителей частотно-регулируемых приводов упрощают эту задачу, добавляя прямое считывание температуры на клавиатуре или дисплее. И, наконец, каждые шесть месяцев включайте VFD в хранилище, чтобы конденсаторы шины постоянного тока работали с максимальной производительностью. В противном случае их зарядная способность значительно снизится. Некоторые производители рекламируют 200 000 часов — почти 23 года — средней наработки на отказ. Следование этим простым процедурам позволяет получить такие впечатляющие характеристики. |
Типы контроллеров двигателей и приводов
Контроллеры и приводы двигателей — это электрические или электронные устройства, которые регулируют скорость двигателя, крутящий момент и выходы положения. Привод изменяет мощность, подаваемую на двигатель, для достижения желаемой мощности. Схемы контроллера обычно интегрируются со схемами привода как один автономный блок, поэтому термины «привод двигателя» и «контроллер двигателя» часто используются как взаимозаменяемые.Существует четыре основных типа контроллера двигателя и приводов: переменного, постоянного тока, сервопривода и шагового, каждый из которых имеет тип входной мощности, измененный в соответствии с желаемой выходной функцией в соответствии с приложением.
Слева направо: серводвигатель переменного тока, бесщеточный двигатель постоянного тока и шаговый двигатель.Изображение предоставлено: similis / Shutterstock.com
Контроллер двигателя и типы приводов
AC
Контроллеры и приводы двигателей переменного тока— это электронные устройства, которые изменяют входную мощность двигателей, обычно регулируя частоту мощности двигателя с целью регулирования выходной скорости и крутящего момента.Основные характеристики включают предполагаемое применение, режим работы привода, тип двигателя, тип инвертора, классификацию напряжения системы контура, номинальную мощность, интерфейс связи, а также электрические характеристики входа и выхода.
Контроллеры и приводы двигателей переменного токаиспользуются в основном в технологических процессах для управления скоростью насосов, вентиляторов, нагнетателей и т. Д. Они известны как приводы с регулируемой скоростью, преобразователи частоты или инверторы переменного тока. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.
DC
Контроллеры и приводы двигателей постоянного тока— это электрические устройства, которые изменяют входную мощность путем настройки источника постоянного или переменного тока на импульсный, постоянный выходной ток с изменяющейся длительностью или частотой импульса. Основные характеристики включают предполагаемое применение, режим работы привода, тип двигателя, систему контура, классификацию напряжения, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики входа и выхода. Контроллеры и приводы двигателей постоянного тока используются в основном для управления скоростью и крутящим моментом двигателей для станков, электромобилей, насосов и т. Д.Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.
Серводвигатель
Контроллеры и приводы серводвигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный токовый выход с изменяющейся длительностью или частотой импульса. Основные характеристики включают предполагаемое применение, тип двигателя, режим работы привода, систему контура, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики.Контроллеры и приводы серводвигателей используются, в основном, в приложениях управления движением в производственных и строительных средах, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателей, и могут работать как на переменном, так и на постоянном токе. Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.Сервоприводы также известны как усилители серводвигателей.
Шаговый
Контроллеры и приводы шаговых двигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный или «ступенчатый» выходной ток.
Основные характеристики включают предполагаемое применение, тип двигателя, режим работы привода, систему контура, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики.
Контроллеры и приводы шаговых двигателейиспользуются в основном в приложениях управления движением в производственных и строительных средах, среди прочего, и используются для управления скоростью двигателя, крутящим моментом и положением.Они используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или OEM-оборудование. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Шаговые приводы также известны как импульсные приводы и шаговые усилители. Контроллеры шагового двигателя также известны как индексаторы двигателей.
Контроллеры двигателей и приводы — Области применения и отрасли
В отличие от серводвигателей и шаговых двигателей, для большинства двигателей переменного и постоянного тока не требуются контроллеры или приводы, кроме простейших пускателей двигателей и аналогичных защитных устройств.Приводы электродвигателей переменного тока используются, когда желательно регулирование скорости электродвигателя переменного тока, поскольку управление скоростью в асинхронном электродвигателе переменного тока обычно не выполняется — после того, как электродвигатель указан (по количеству полюсов), рабочая скорость указывается на паспортной табличке. С другой стороны, щеточные двигатели постоянного тока, в основном, регулируются по скорости, просто изменяя напряжение, подаваемое на ротор двигателя и поле. Это можно сделать с помощью простого реостата; ни контроллер, ни привод не нужны. Новые бесщеточные двигатели постоянного тока не имеют механической коммутации и, следовательно, требуют контроллеров и приводов для электронной коммутации магнитного поля.Серводвигатели и шаговые двигатели, поскольку они представляют собой устройства позиционирования, в отличие от машин вращательного движения, также требуют контроллеров и драйверов для их работы.
Приводы двигателей переменного токаиспользуются для управления скоростью двигателей, приводящих в действие насосы, вентиляторы и т. Д., Где в противном случае можно было бы использовать традиционные клапаны или заслонки для регулирования потока. Электроприводы переменного тока используются для повышения эффективности за счет настройки скорости насоса, вентилятора и т. Д. В точном соответствии с требованиями.
Приводы двигателей постоянного токаиспользуются для управления двигателями постоянного тока с постоянными магнитами, работающими от источников переменного тока.Двигатели постоянного тока обладают очень хорошим крутящим моментом на низкой скорости, что делает их особенно подходящими для лебедок, кранов и т. Д., Где необходимо поднимать грузы без «пуска с хода». До появления электронных систем управления постоянным током мы часто использовали электродвигатели постоянного тока в качестве мотор-генераторов для выработки постоянного тока через асинхронные электродвигатели переменного тока.
Контроллеры и приводы серводвигателейполагаются на обратную связь от серводвигателей для управления положением, скоростью, ускорением и т. Д. Производители серводвигателей обычно поставляют приводы, которые работают с их двигателями.Хотя для степперов не требуется петля обратной связи, некоторые ее используют. Производители шаговых двигателей также обычно поставляют приводы для своих двигателей. Большинство производителей серводвигателей и шаговых двигателей предоставляют диаграммы в качестве указаний, какие двигатели будут работать с какими приводами.
Соображения
Выбор контроллеров двигателей и приводов начинается с знания типа двигателя. Соответствующие подкатегории затем согласовываются с этой базовой информацией.
Решение использовать приводы переменного тока для асинхронных двигателей часто является экономическим решением, основанным на рабочих характеристиках конкретной установки: как часто насос или вентилятор работает с дроссельными клапанами или решетчатыми воздуховодами.По крайней мере, один производитель предлагает калькулятор (см. Ниже) для определения экономии энергии приводов переменного тока на основе конкретных сценариев эксплуатации. Двигатели, предназначенные для использования с приводами с регулируемой скоростью, обычно рассчитаны на работу с инвертором.
Еще одно соображение для приводов переменного тока — это характер применения, в котором постоянный крутящий момент и переменный крутящий момент являются основными разделами. Для применений с переменным крутящим моментом, таких как центробежные вентиляторы, требования к крутящему моменту зависят от скорости двигателя. Для приложений с постоянным крутящим моментом, таких как конвейеры, требования к крутящему моменту одинаковы независимо от скорости двигателя.Приводы переменного тока обычно предназначены для работы с переменной или постоянной скоростью.
Щеточные двигатели постоянного тока, работающие от переменного тока, обычно приводятся в действие с помощью тиристорных мостовых выпрямителей, которые позволяют переменному току течь к двигателю только в одном направлении, копируя источник постоянного тока. Более подробную информацию можно найти в приведенных ниже ссылках. Такие поставщики, как Baldor, предоставляют устройства управления постоянным током для односторонних и рекуперативных приложений для двигателей постоянного тока мощностью до 5 лошадиных сил, а через свою материнскую компанию (ABB) предлагает приводы постоянного тока мощностью до 3000 л.с.Для односторонних приводов обычно требуется тормоз для остановки двигателя, в то время как рекуперативные приводы могут вращать двигатель в любом направлении и, таким образом, обеспечивать тормозное усилие за счет реверсирования. Генерируемая мощность обычно отводится через реверсивные резисторы.
Электродвигатели постоянного тока, работающие от систем постоянного тока, такие как электрические домкраты для поддонов, также используют элементы управления для изменения скорости и направления. Для бесщеточных двигателей постоянного тока или двигателей с постоянным магнитом также требуются контроллеры для электронной коммутации их магнитных полей.
Серводвигателимогут быть переменного или постоянного тока, с постоянным током, как щеточного, так и бесщеточного типов. Во всех случаях они требуют контроля, потому что они являются устройствами обратной связи. Линейные двигатели обычно основаны на сервоприводах и также требуют управления.
Шаговые двигатели, как правило, не требуют обратной связи, но должны быть «настроены» при включении, чтобы двигатель знал, где он находится. Отсюда он считает шаги, чтобы отслеживать позицию. Некоторые шаговые двигатели подключают свои приводы непосредственно к раме двигателя.
Важные атрибуты
Полупроводниковое устройство
Вообще говоря, IGBT и SCR используются для устройств среднего и высокого напряжения, тогда как MOSFET используются в приложениях с низким энергопотреблением.
Фаза входа двигателя
Двигатели обычно являются одно- или трехфазными машинами, в зависимости от фазы переменного тока, который их питает. Шаговые двигатели являются исключением в этом отношении, поскольку фаза относится к архитектуре самого шагового двигателя, обычно описываемого как двух- или пятифазный.У Oriental Motors есть хорошая статья, в которой обсуждается разница, цитируемая ниже.
Корпуса
Электрические шкафы определены в соответствии с критериями NEMA или IEC по защите окружающей среды и проникновению.
Режим работы привода
Как обсуждалось выше, приводы переменного тока обычно проектируются как с постоянным, так и с переменным крутящим моментом в зависимости от области применения.
ресурсов
Категории связанных продуктов
Прочие изделия для двигателей
Прочие «виды» статей
Больше от Instruments & Controls
Что такое привод переменного тока и как он работает?
Олли Тева описывает технологию приводов переменного тока и, в частности, ее использование в системах отопления, вентиляции и кондиционирования воздуха.
Привод переменного тока — это устройство, которое используется для управления скоростью электродвигателя.Скорость регулируется изменением частоты подачи электроэнергии к двигателю.
Трехфазное напряжение в национальной электрической сети, подключенной к двигателю, создает в нем вращающееся магнитное поле. Ротор электродвигателя будет следовать за этим вращающимся магнитным полем.
Управление скоростью двигателя
Скорость регулируется приводом переменного тока, преобразующим частоту сети до любого значения в диапазоне от 300 Гц или даже выше. Таким образом, скорость двигателя регулируется пропорционально частоте.
Технология управления скоростью двигателя переменного тока состоит из:
- Выпрямительный блок : Электропривод переменного тока получает питание от электрической сети через выпрямитель. Выпрямительный блок может быть однонаправленным или двунаправленным. В однонаправленном режиме привод переменного тока может ускорять и запускать двигатель, забирая энергию из сети. Если привод переменного тока является двунаправленным, он также может получать механическую энергию вращения от двигателя, обрабатывать и передавать ее обратно в электрическую сеть.
- Цепь постоянного тока: Цепь будет накапливать электрическую энергию выпрямителя для использования инвертором.В большинстве случаев энергия хранится в конденсаторах большой мощности.
- Inverter Uni: Инверторный блок привода двигателя переменного тока берет электрическую энергию из цепи постоянного тока и подает ее на двигатель. Инвертор использует методы модуляции для создания необходимого выходного трехфазного переменного напряжения для двигателя. Частоту можно отрегулировать в соответствии с потребностями процесса. Чем выше частота выходного напряжения, тем выше скорость двигателя и, следовательно, производительность процесса.
Преимущества привода двигателя переменного тока
Типы двигателей, которыми управляют приводы переменного тока, обычно работают с постоянной скоростью. Предоставление пользователю возможности контролировать скорость двигателя потенциально дает ему различные преимущества с точки зрения управления технологическим процессом, нагрузки на систему и экономии энергии.
Управление процессом: управление выходом процесса в соответствии с потребностями; синхронизация различных частей основного процесса для обеспечения плавного перехода между подпроцессами; легко изменить настройку при изменении требований к процессу.
При системной нагрузке: снижение пускового тока, что позволяет использовать предохранители и соединения питания меньшего размера и снижает пиковые нагрузки в электрической сети; уменьшение механического удара при запуске и остановке.
Энергия: экономия электроэнергии по сравнению с традиционными методами управления технологическим процессом. Например, в насосах и вентиляторах экономия энергии обычно составляет 20-50 процентов.
HVAC и AC
В системах отопления, вентиляции и кондиционирования воздуха (HVAC) основные процессы связаны с нагревом, охлаждением, сушкой и циркуляцией воздуха.Вспомогательные процессы в основном связаны с отводом лишнего тепла из здания или обеспечением здания дополнительной тепловой энергией.
Большинство систем отопления, вентиляции и кондиционирования воздуха, в которых используются приводы переменного тока, — это вентиляторы, насосы и компрессоры.
Вентиляторы и насосы: Использование привода переменного тока для управления производительностью вентилятора или насоса вместо использования заслонок, лопаток, клапанов или двухпозиционного регулятора обеспечивает значительную экономию энергии, если требуемая мощность в большинстве случаев ниже номинальной.
Привод переменного тока регулирует скорость насоса и вентилятора, изменяя подаваемую электрическую энергию, а не демпфируя поток воздуха или воды.Это похоже на снижение скорости автомобиля путем уменьшения нажатия на акселератор вместо использования тормоза для снижения скорости. Срок окупаемости привода переменного тока обычно составляет один год или меньше.
Другими преимуществами использования привода переменного тока для управления скоростью вентилятора или насоса являются:
- Плавный подъем и спуск вызывает меньшую нагрузку на механику вентиляторов и насосов, а также на воздуховоды и водяные трубопроводы.
- Замедление скорости вместо демпфирования выходного сигнала приведет к снижению уровня шума.
Двигатели и схемы управления двигателями
Этот курс также можно пройти для получения академического кредита как ECEA 5341, часть степени магистра наук в области электротехники CU Boulder.
Да, именно моторный привод приводит в движение системы вокруг нас
Что заставляет их двигаться? Моторный привод.
Прежде всего, это может быть связано с колесами, как в случае с автомобилем. Но что на самом деле движет этими движениями, так это двигатели . Кроме того, многие бытовые приборы, такие как холодильники, кондиционеры, вентиляторы, стиральные машины, сушилки и многие другие, требуют электродвигателей.
Ага, именно моторный привод приводит в движение системы вокруг нас (фото предоставлено Texas Instruments)Можно видеть, что моторы являются частью нашей повседневной жизни. Цель этой технической статьи — обсудить приводы двигателей и их силовую электронику — различные компоненты и требования к приложениям, с которыми мы сталкиваемся в бытовых и промышленных условиях.
Электродвигатель — это устройство , преобразующее электрическую энергию в механическую энергию . Его также можно рассматривать как устройство, передающее энергию от электрического источника к механической нагрузке. Система, в которой расположен двигатель и заставляет его вращаться, называется приводом, также называемым электроприводом или моторным приводом.
Функция моторного привода состоит в том, чтобы потреблять электрическую энергию от электрического источника и подавать электрическую энергию на двигатель, так что достигается желаемая механическая мощность.
Обычно это скорость двигателя, крутящий момент и положение вала двигателя. На рисунке 1 показана блок-схема моторного привода.
Рисунок 1 — Блок-схема системы моторного приводаФункции схемы преобразователя мощности в моторном приводе:
- Передача электрической энергии от источника, который может иметь заданное напряжение, ток определенной частоты и фаза в качестве входа
- К электрическому выходу с желаемым напряжением, током, частотой и фазой на двигатель, так что достигается необходимая механическая мощность двигателя для управления нагрузкой
- Контроллер регулирует поток энергии посредством обратной связи, поступающей от датчика блок
- Сигналы, измеряемые датчиками двигателя, имеют малую мощность, которые затем отправляются на контроллер.
- Контроллер сообщает преобразователю, что ему нужно делать.Система обратной связи с обратной связью — это метод сравнения того, что на самом деле происходит, с тем, что двигатель должен выдавать
, а затем соответствующей корректировки выхода для поддержания целевого выхода
КПД привода двигателя
Электродвигатели составляют 45 процентов все потребление электроэнергии во всех приложениях . Повышение эффективности систем моторных приводов потенциально может привести к значительному сокращению глобального потребления электроэнергии.
С ростом спроса на электроэнергию, а также с индустриализацией и урбанизацией во всем мире, возможность поставки энергии становится еще более сложной задачей. В рамках глобальных усилий по снижению энергопотребления и выбросов углерода в окружающую среду различные нормативные акты во многих странах выдвинули и постоянно работают над правительственными постановлениями по повышению эффективности моторных приводов.
Все эти требования делают необходимым наличие эффективной системы преобразователя мощности с использованием импульсных источников питания (SMPS) .В SMPS используются полупроводниковые переключатели питания (также называемые силовыми электронными переключателями) в режиме переключения и только в состоянии включения и выключения, что в идеальной ситуации дает 100-процентный КПД.
Системы силовой электроники в основном разработаны с использованием кремниевого управления питанием с силовыми полупроводниковыми переключателями. Эти переключатели представляют собой силовые полевые МОП-транзисторы, биполярные переходные транзисторы (BJT) и биполярные транзисторы с изолированным затвором (IGBT), которые значительно улучшили свои характеристики.Примеры включают более низкое сопротивление в открытом состоянии, повышенное напряжение блокировки и более высокие токи возбуждения.
Кроме того, ведется большая работа по использованию широкозонных полупроводников , таких как карбид кремния (SiC) . SiC представляет особый интерес для моторных приводов, которые передают очень большую мощность при высоком уровне напряжения.
Классификация моторных приводов
Прежде чем мы углубимся в области применения моторных приводов и роль силовой электроники в этих системах, вот краткий обзор классификации моторных приводов (рис. 2).
Рисунок 2 — Классификация двигателей (* PMSM = синхронные двигатели с постоянными магнитами)В таблице 1 показано, где используются двигатели переменного тока (индукционные) и постоянного тока (щеточные и бесщеточные), с точки зрения уровней напряжения и мощности, а также плюсы и минусы каждый.
Таблица 1 — Сравнительный анализ двигателейПреобразователь мощности в моторных приводах
Конфигурация привода для двигателей, приведенная в Таблице 1 выше, в целом одинакова. Однако отличает топология преобразователя мощности в схеме преобразователя мощности.Поскольку основная часть этих приложений переходит на бесщеточные двигатели постоянного тока (BLDC) или асинхронные двигатели, мы сосредоточимся на приложениях, в которых используются эти два типа двигателей.
В общем, выбор моторного привода может потребовать рассмотрения уровней мощности и напряжения при ответе на вопросы, которые зависят от области применения.
Примерами могут быть пусковой крутящий момент , инерция нагрузки, режим работы, условия окружающей среды или способность двигателя регенерировать .
Приводы электродвигателей переменного тока
Привод электродвигателей переменного тока, как следует из названия, требует входа переменного тока для асинхронного двигателя, используемого для управления большими промышленными нагрузками , такими как HVAC для коммерческих зданий — насосы и компрессоры, автоматизация производства, промышленная оборудование, требующее приспособлений для регулировки скорости, такое как конвейерные ленты, проходка туннелей, горнодобывающая промышленность, бумажные фабрики и многие другие.
Привод двигателя переменного тока принимает источник энергии переменного тока, выпрямляет его до напряжения шины постоянного тока и, реализуя сложные алгоритмы управления, преобразует постоянный ток обратно в переменный ток в двигатель, используя сложные алгоритмы управления, основанные на нагрузке.
На рисунке 3 ниже показана блок-схема привода с электродвигателем переменного тока. Силовой каскад и блоки питания отмечены бирюзовым цветом.
Силовой каскад
Топология силового преобразователя, используемого в силовом каскаде, представляет собой трехфазный инвертор , который передает мощность в диапазоне от кВт до МВт.Инверторы преобразуют постоянный ток в переменный. Типичные уровни напряжения на шине постоянного тока составляют 600–1200 В. Учитывая высокие уровни мощности и напряжения, трехфазный инвертор использует шесть изолированных драйверов затвора (рисунок 3).
В каждой фазе используется переключатель биполярного транзистора с изолированным затвором (IGBT) верхнего и нижнего плеча.
Обычно при работе в диапазоне 20–30 кГц каждая фаза подает положительные и отрицательные импульсы высокого напряжения постоянного тока на обмотки двигателя в переменном режиме.
Мощный IGBT требует изолированных драйверов затвора для управления их работой.Каждый IGBT управляется одним изолированным драйвером затвора. Гальваническая развязка между высоковольтным выходом драйвера затвора и низковольтными управляющими входами, поступающими от контроллера.
Рисунок 3 — Блок-схема привода электродвигателя переменного токаЭмиттер верхнего IGBT плавает, что требует использования изолированного драйвера затвора. Чтобы изолировать цепь высокого напряжения от цепи управления низкого напряжения, изолированные драйверы затвора используются для управления нижними IGBT.
Драйверы затвора преобразуют сигналы широтно-импульсной модуляции (ШИМ) от контроллера в импульсы затвора для полевых транзисторов или IGBT.Более того, эти драйверы затвора должны иметь встроенные функции защиты, такие как рассыщение, активное ограничение Миллера, мягкое выключение и т. Д.
Эти изолированные драйверы затвора обычно страдают от низкой мощности возбуждения, особенно когда допустимый ток возбуждения ниже диапазона 2А. Традиционно в этих приводах используются дискретные цепи для увеличения управляющего тока. В последнее время было разработано несколько ИС драйверов затвора, чтобы заменить дискретное решение.
Рисунок 4 иллюстрирует эту тенденцию.
Рисунок 4 — Топология трехфазного инвертора с источниками питания повышающих драйверов затворов для драйверов затворов IGBT в силовом каскадеЧтобы воспользоваться преимуществами низких потерь проводимости в IGBT, драйверы затворов должны работать при напряжениях, намного превышающих их пороговое значение напряжение в пределах 15-18В. Кроме того, IGBT — это устройство с неосновной несущей с высоким входным импедансом и большой биполярной токоведущей способностью. Характеристики переключения IGBT аналогичны характеристикам силового MOSFET.
В заданном состоянии при включении БТИЗ ведет себя так же, как силовой полевой МОП-транзистор , показывая аналогичные времена нарастания тока и спада напряжения. Однако ток переключения при выключении другой.
В конце события переключения IGBT имеет «хвостовой ток», которого нет для MOSFET. Этот хвост вызван неосновными носителями, захваченными в «основании» биполярной выходной секции IGBT. Это заставляет IGBT оставаться включенным.
В отличие от биполярного транзистора, невозможно извлечь эти несущие для ускорения переключения, поскольку нет внешнего соединения с базовой частью. Таким образом, устройство остается включенным, пока носители не рекомбинируют. Этот хвостовой ток увеличивает потери при выключении, что требует увеличения мертвого времени между проводимостью двух устройств для данной фазы полумостовой схемы.
Наличие отрицательного напряжения (от –5 В до –10 В) на затворе помогает сократить время выключения, помогая рекомбинировать захваченные носители .Когда IGBT включен, высокое значение dv / dt и паразитная емкость между затвором и эмиттером генерируют скачки напряжения на выводе затвора. Эти выбросы могут вызвать ложное включение нижнего IGBT. Наличие отрицательного напряжения на затворе помогает избежать ложного срабатывания триггера.
Обычно на затвор подается напряжение от 15 до 18 В для включения устройства, а отрицательное напряжение от –5 до –8 В применяется для выключения IGBT. Это требование является ключевым для определения номинальной мощности источника питания для драйвера IGBT.
Обычно таким источником питания является ШИМ-контроллер с топологией, которая имеет возможность масштабировать выходную мощность при управлении этими мощными IGBT. Типичные входы для этих источников питания регулируются до 24 В (поясняется вкратце).Одним из примеров классической топологии, используемой для этого источника питания, является двухтактный изолированный преобразователь. Эта топология аналогична прямому преобразователю с двумя первичными обмотками. Преимущество двухтактных преобразователей перед преобразователями прямого и обратного направления состоит в том, что их можно масштабировать до более высоких мощностей в дополнение к более высокой эффективности.
Другие источники питания
На рисунке 3 показан автономный источник питания, который потребляет мощность от универсальной трехфазной линии переменного тока на регулируемый выход 24 В постоянного тока. Из-за низкого уровня мощности (ниже 75 Вт) коррекция коэффициента мощности (PFC) не требуется.
Эти автономные источники питания обычно представляют собой интегральные схемы преобразователя с обратной топологией , которые могут быть контроллером с внешним полевым МОП-транзистором или встроенным контроллером или переключателем полевого МОП-транзистора.
Выбор ИС источника питания является гибким и зависит от уровня мощности, количества выходов и точности регулирования .Этот автономный источник питания обычно представляет собой отдельный модуль.
Выход 24 В постоянного тока представляет собой системную шину питания в системе привода двигателя переменного тока, которая вводится в источник питания смещения для силового каскада и неизолированного преобразователя постоянного тока в постоянный. Этот неизолированный регулятор постоянного / постоянного тока от системы 24 В обеспечивает питание контроллера, коммуникационных микроконтроллеров и микроконтроллеров безопасности, интерфейсных приемопередатчиков и преобразователей данных.
Приводы двигателей BLDC
Бесщеточные двигатели постоянного тока (BLDC) становятся наиболее популярным выбором, заменяя щеточные двигатели постоянного и переменного тока на таких рынках, как HVAC, особенно из-за их более высокой эффективности и высокой надежности.Особый интерес представляют электроинструменты и бытовая техника, такая как холодильники, кондиционеры, пылесосы и другие подобные бытовые товары.
Использование BLDC на этих рынках снижает общий вес системы.
На фиг. 5 показана блок-схема моторного привода BLDC в беспроводном (с батарейным питанием) электроинструменте , таком как электродрель. Блоки питания показаны синим цветом.
Рисунок 5 — Блок-схема беспроводного моторного привода BLDCСиловой каскад
Силовой каскад BLDC также является инвертором, аналогичным моторному приводу переменного тока , за исключением того, что вход может быть одно- или трехфазным .Напряжение на шине постоянного тока обычно составляет 48-600 В, в зависимости от уровней мощности. Переключатель обычно представляет собой силовой полевой МОП-транзистор с частотой около 100 кГц. Драйверы затвора представляют собой драйверы верхнего и нижнего плеча или полумостовые драйверы на каждую фазу инвертора и не требуют изоляции.
Функции защиты не так важны, как те, которые необходимы для привода двигателя переменного тока, за исключением управления мертвым временем, чтобы избежать прострела, поскольку драйверы верхнего и нижнего плеча работают от одной ИС.
Источники питания
Напряжение смещения на контроллер и драйверы затвора поступает от регулируемого источника питания от батареи.Типичной батареей, используемой в этом пространстве, является пятиэлементная литий-ионная (Li-Ion) батарея с номинальным напряжением 18 В. Поскольку это беспроводные инструменты, для периодической зарядки дрели требуется настенное зарядное устройство.
Обычно зарядка в диапазоне 50–1000 Вт выполняется с помощью изолированного контроллера , который зависит от топологии и зависит от уровня мощности.
Кроме того, PFC обычно не требуется, если уровень мощности не находится в нескольких сотнях Вт . Типичные контроллеры зарядки основаны на топологиях Y-back, чередовании y-back или двухтактной топологии.
Подводя итог…
Электроприводы становятся все более эффективными, поскольку в них включаются силовые электронные устройства, такие как переключатели питания (IGBT и MOSFET), драйверы затвора и источники смещения . Мы обсудили две ключевые и популярные системы приводов двигателей: переменного тока и BLDC, а также рассмотрели функции и роль схем управления затворами и связанных с ними источников смещения.
Были выделены такие ключевые области, как изоляция, уровни напряжения и функции защиты.
Ссылка // Силовая электроника в моторных приводах: где это? by Нагараджан Шридхар (менеджер по маркетингу продуктов для высокопроизводительных изолированных систем управления питанием, Texas Instruments)
Электрические машины и приводы | CUSP
Задачи курса
- Опишите структуру систем электропривода и их роль в различных приложениях, таких как гибкие производственные системы, энергосбережение, возобновляемые источники энергии, транспорт и т. Д., что делает электрические приводы перспективной технологией.
- Понимать основные требования, предъявляемые механическими системами к электроприводам.
- Обзор векторов и трехфазных электрических цепей.
- Понимать основные принципы силовой электроники в приводах, использующих импульсные преобразователи и широтно-импульсную модуляцию для синтеза напряжений в приводах двигателей постоянного и переменного тока.
- Понимать основные концепции магнитных цепей применительно к электрическим машинам.
- Поймите два основных принципа (генерация силы и ЭДС), которые управляют электромеханическим преобразованием энергии.
- Описать работу приводов двигателей постоянного тока для выполнения четырехквадрантного режима работы для удовлетворения требований к механической нагрузке.
- Конструктивный регулятор крутящего момента, скорости и положения моторных приводов.
- Ясно научитесь использовать пространственные векторы, представленные на физической основе, для описания работы машины переменного тока.
- Поймите основные принципы работы приводов переменного тока с постоянными магнитами (самосинхронные приводы переменного тока).
- Описать работу асинхронных машин в установившемся режиме, что позволяет управлять ими в приводах с асинхронными двигателями.
- Изучите управление скоростью приводов асинхронных двигателей энергоэффективным способом с помощью силовой электроники.
- Изучите основы работы шаговых двигателей и приводов с реактивными двигателями.
- Узнайте об энергоэффективности электроприводов и взаимодействии инвертор-двигатель.
Лаборатория
Новая лаборатория электроприводов не требует MATLAB или dSpace и стоит 1/10 стоимости предыдущей версии.Лаборатории реализованы с использованием свободно доступной платформы численного моделирования и контроллера в реальном времени Sciamble Workbench, разработанной в Университете Миннесоты.
Новая версия с использованием Sciamble
Последнюю версию лабораторного руководства можно найти здесь.
Щелкните здесь, чтобы получить инструкции по установке Sciamble Workbench.
Щелкните здесь, чтобы приобрести полный лабораторный комплект для электроприводов.
Примечание. Доступ к этим лабораториям можно получить удаленно. Для получения более подробной информации посетите Sciamble
.Список экспериментов
|
Лаборатория базовых приводов (бакалавриат) |
Advanced Drives Lab (выпускной уровень) |
|
|
Электрические машины и приводы
Учебник
Электрические машины и приводы: первый курс
Автор: Mohan
ISBN: 1118074815 9781118074817
Издатель: Wiley
Полное руководство по решению для «Электрических машин и приводов: первый курс» Чтобы получить копию всего руководства по решениям, свяжитесь с John Wiley & Sons и зарегистрируйтесь в качестве преподавателя.
Органы управления электродвигателями — Ликвидаторы D&F
Органы управления двигателем в идеале можно идентифицировать как группу устройств, которые заранее определенным образом регулируют производительность электродвигателя. Органы управления двигателем также известны как контроллеры двигателя. У них есть несколько основных функций, которые включают в себя: автоматический или ручной запуск, а также остановку работы электродвигателя, установку вперед или назад хода вращения, выбор и регулирование скорости вращения, управление или регулирование крутящего момента, а также защиту двигатель от нескольких степеней электрических перегрузок и неисправностей.
Приложения для управления двигателем
Источник изображения: autosystempro.com
Электродвигатели, независимо от их типа, имеют контроллер того или иного типа. Эти контроллеры двигателей могут различаться по своим характеристикам и сложности, что в основном определяется функцией конкретного двигателя. Самый простой пример механизма управления двигателем — это обычный выключатель, который подключает двигатель к источнику питания. Этот переключатель может быть ручным контроллером или реле, подключенным к автоматическому датчику для запуска и остановки двигателя.
В зависимости от области применения двигателя контроллеры могут предлагать различные функции. Они помогают двигателю запускаться в условиях низкого напряжения, допускают многоскоростные или обратные операции управления, защищают от перегрузки по току и перегрузок, а также выполняют широкий спектр других функций. Некоторые сложные устройства управления двигателем также помогают эффективно управлять скоростью, а также крутящим моментом двигателя (ов), а также могут быть частью системы управления с обратной связью, отвечающей за точное позиционирование машины с приводом от двигателя.
Различные типы контроллеров двигателя
Устройства управления двигателями предназначены для ручного, автоматического или дистанционного управления. Их можно использовать для запуска или остановки двигателя, прикрепленного к машине, а также для нескольких других целей. Эти элементы управления классифицируются в зависимости от типа двигателя, для работы с которым они предназначены.
Маленькие двигатели можно запустить, просто вставив электрический выключатель в розетку и нажав кнопку питания.Однако для более крупных двигателей требуются пускатели двигателей или подрядчики, которые представляют собой специализированные коммутационные блоки, используемые для питания электродвигателя. При подаче питания пускатели прямого включения немедленно подключают клеммы двигателя к источнику питания. Реверсивный пускатель, который содержит две цепи прямого включения, также может использоваться для вращения двигателя в любом направлении. В очень больших двигателях, работающих от источников питания среднего напряжения, в качестве пусковых элементов используются силовые выключатели.
Два или более пускателя используются для пуска двигателя в условиях пониженного напряжения.Через серию индуктивностей или автотрансформатор на клеммах двигателя подается более низкое напряжение, что, в свою очередь, помогает снизить пусковой крутящий момент и пусковой электрический ток. Как только двигатель достигает определенной доли скорости максимальной нагрузки, стартер автоматически передает полный ток напряжения на клеммы двигателя.
Также известный как привод с регулируемой скоростью, привод с регулируемой скоростью представляет собой унифицированную комбинацию устройств, которые позволяют операторам управлять автомобилем, а также регулировать рабочую скорость механической нагрузки.Такие приводы состоят из регулятора скорости или преобразователя мощности, ряда вспомогательного оборудования и устройств и электродвигателя.
В интеллектуальных устройствах управления двигателем используются современные микропроцессоры для управления мощностью электронных устройств, используемых в электродвигателе. Эти контроллеры контролируют нагрузку на двигатель и соответственно согласовывают крутящий момент с зарегистрированной нагрузкой. Это достигается за счет снижения напряжения на клеммах переменного тока и одновременного снижения тока и квар, что приводит к энергоэффективности и снижению шума, вибрации, а также тепла, выделяемого двигателем.
Сервоконтроллерыможно рассматривать как широкую категорию устройств управления двигателями, в первую очередь известных своими функциями выделения, такими как:
- Точное позиционное управление с обратной связью.
- Быстрое ускорение.
- Серводвигатели с точным регулированием скорости, изготовленные на основе различных типов двигателей, включая серводвигатели переменного тока, щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока.
Эти элементы управления используют обратную связь по положению для замыкания контура управления и обычно используются в сочетании с резольверами, энкодерами и датчиками Холла для прямого измерения положения роторов.
Свяжитесь с намиЕсли у вас есть вопросы, свяжитесь с нами по телефону, факсу, электронной почте или заполнив нашу онлайн-форму.
