Какие существуют схемы распиновки разъема RJ45 для витой пары. Как правильно обжать кабель по стандартам T568A и T568B. Какие инструменты нужны для обжима витой пары. Как проверить правильность обжима кабеля.
Что такое распиновка кабеля витой пары
Распиновка кабеля витой пары — это схема подключения проводников кабеля к контактам разъема RJ45. Правильная распиновка необходима для корректной передачи сигнала по кабелю. Существует несколько стандартных схем распиновки:
- T568A — используется в основном в США
- T568B — наиболее распространенная схема в остальном мире
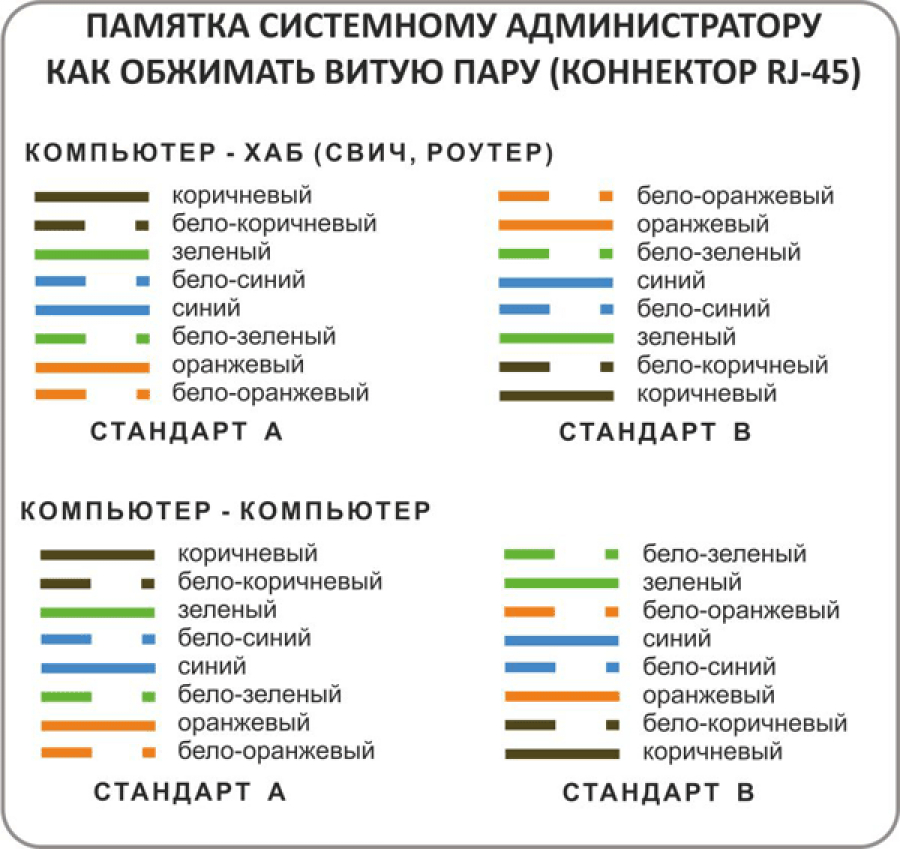
- Прямая (1:1) — для соединения компьютеров через коммутатор/маршрутизатор
- Перекрестная (crossover) — для прямого соединения двух устройств
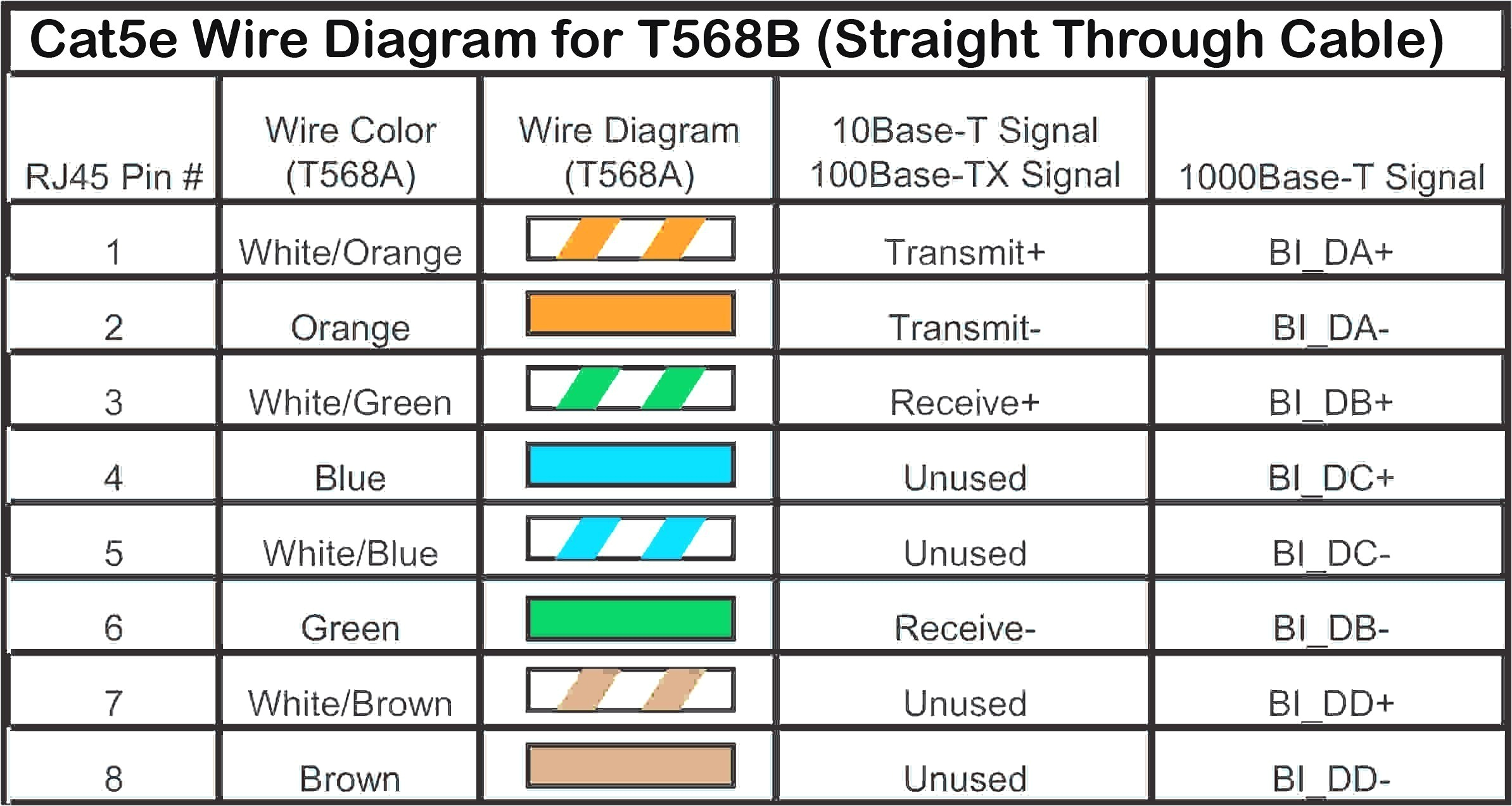
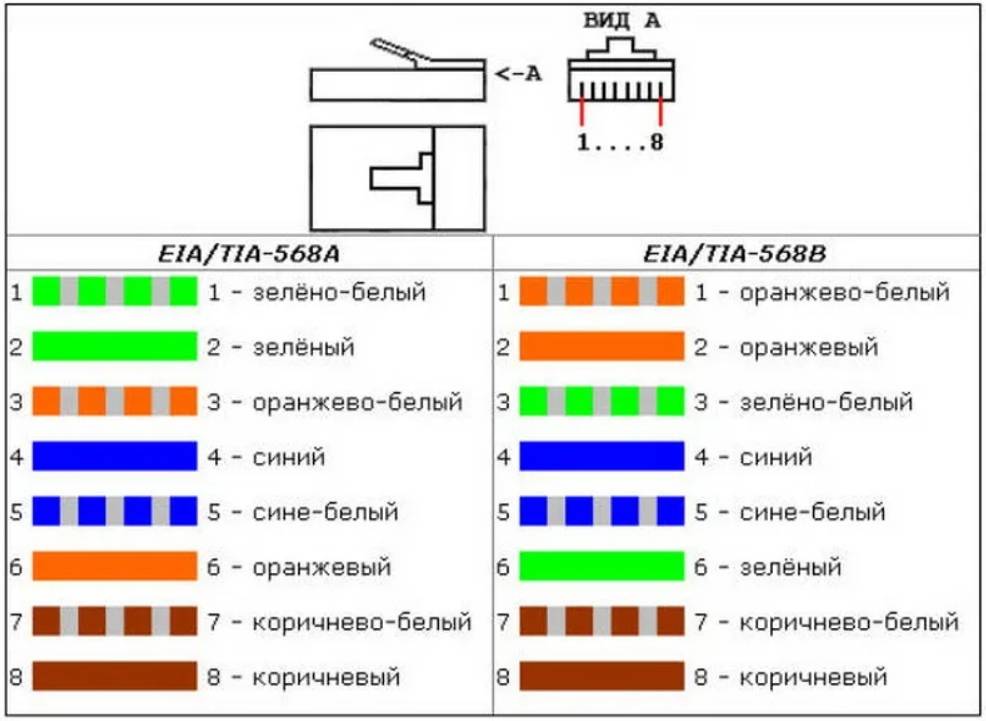
Стандартные схемы распиновки T568A и T568B
Схемы T568A и T568B отличаются порядком подключения зеленой и оранжевой пар проводников:
T568A:
- Бело-зеленый
- Зеленый
- Бело-оранжевый
- Синий
- Бело-синий
- Оранжевый
- Бело-коричневый
- Коричневый
T568B:
- Бело-оранжевый
- Оранжевый
- Бело-зеленый
- Синий
- Бело-синий
- Зеленый
- Бело-коричневый
- Коричневый
Схема B является наиболее распространенной и рекомендуется для большинства сетей.
Как правильно обжать кабель витой пары
Для правильного обжима кабеля витой пары потребуются следующие инструменты:
- Кримпер для обжима разъемов RJ45
- Стриппер для зачистки кабеля
- Кусачки
- Разъемы RJ45
Процесс обжима включает следующие шаги:
- Зачистите внешнюю оболочку кабеля на 2-3 см
- Расправьте пары проводников и выровняйте их согласно выбранной схеме
- Отрежьте проводники ровно, оставив примерно 1,3 см
- Вставьте проводники в разъем до упора
- Поместите разъем в кримпер и сожмите его
Как проверить правильность обжима кабеля
Проверить корректность обжима можно следующими способами:
- Визуально — убедитесь, что порядок цветов соответствует выбранной схеме
- Тестером для витой пары — позволяет проверить целостность всех проводников
- Подключением к сетевому оборудованию — должен загореться индикатор соединения
При обнаружении ошибок необходимо переобжать кабель. Правильный обжим обеспечит стабильную работу сетевого соединения на высоких скоростях.
Распространенные ошибки при обжиме витой пары
При самостоятельном обжиме кабеля витой пары часто допускаются следующие ошибки:
- Неправильный порядок проводников в разъеме
- Недостаточная длина зачистки внешней оболочки
- Повреждение проводников при зачистке
- Неплотная фиксация проводников в разъеме
- Чрезмерное обжатие разъема кримпером
Чтобы избежать этих ошибок, важно внимательно следовать инструкции и использовать качественные инструменты для обжима. При возникновении сомнений лучше обратиться к специалисту.
Отличия прямого и перекрестного кабеля
Прямой (патч-корд) и перекрестный (кросс-овер) кабели отличаются схемой распиновки на концах:
Прямой кабель:
- Оба конца обжаты по одинаковой схеме (обычно T568B)
- Используется для подключения устройств к коммутаторам/маршрутизаторам
Перекрестный кабель:
- Один конец обжат по схеме T568A, другой — по T568B
- Применяется для прямого соединения двух компьютеров или сетевых устройств
Большинство современного сетевого оборудования поддерживает автоопределение типа кабеля, поэтому различия между прямым и перекрестным кабелем становятся менее существенными.
Категории кабелей витой пары
Кабели витой пары делятся на категории в зависимости от характеристик и пропускной способности:

- Cat 5 — до 100 Мбит/с, частота до 100 МГц
- Cat 5e — до 1000 Мбит/с, частота до 100 МГц
- Cat 6 — до 10 Гбит/с на коротких расстояниях, частота до 250 МГц
- Cat 6a — до 10 Гбит/с на расстоянии до 100 м, частота до 500 МГц
- Cat 7 — до 40 Гбит/с на коротких расстояниях, частота до 600 МГц
Выбор категории кабеля зависит от требуемой скорости передачи данных и условий прокладки. Для большинства домашних и офисных сетей достаточно кабеля категории 5e или 6.
Особенности обжима экранированной витой пары
Экранированная витая пара (STP, FTP) требует особого подхода при обжиме:
- Необходимо использовать специальные экранированные разъемы
- Экранирующую оплетку или фольгу нужно подключить к контакту заземления на разъеме
- Важно обеспечить надежный контакт экрана с металлическим корпусом разъема
- Следует использовать инструменты, предназначенные для работы с экранированным кабелем
Правильное подключение экрана позволяет снизить уровень электромагнитных помех и повысить помехозащищенность линии связи. Экранированные кабели рекомендуется использовать в промышленных условиях или при прокладке в местах с высоким уровнем электромагнитных помех.
Распиновка разъёмов и контактов | 2 Схемы
Смотрите схемы распиновки штекеров и электрических разъёмов автомобильных магнитол, кабелей и панелей, компьютерных узлов, проводов блоков питания и различных приборов.
Кабельное соединение Molex Wire-to-Board предлагает простое, надежное и недорогое решение для передачи энергии и сигналов связи между отдельными печатными платами в устройстве. Предыдущие поколения разъемов …
Промышленные разъемы HA, HE, HD, HVE, HSB, HM, HK и HQ предназначены для требовательных устройств, включая машины и станки, роботы, системы автоматизации, энергетики, возобновляемые источники …
Семейство разъемов TRIM TRIO Souriau представляет собой общую платформу для межблочных соединений, предназначенную для требовательных устройств в сложных промышленных условиях. Стили разъемов Trim trio включают …
Светодиодное освещение становится все более популярным, поэтому рынок компонентов демонстрирует возрастающую специализацию в области аксессуаров и оборудования для источников света с использованием этих элементов. До …
До …
Круглые соединители в пластмассовых корпусах обозначаются CPC (Circular Plastic Connector) и предназначены для больших токов. Они не только могут работать при высоких температурах до 110°C, …
Для большинства разъем Jack ассоциируется только с подключением аудиосигнала, в то время как есть много других применений и возможностей этого популярного соединения. Давайте изучим некоторые …
RS это стандарт, описывающий интерфейс для последовательной двунаправленной передачи данных между терминалом (DTE, Data Terminal Equipment) и конечным устройством (DCE,Data Circuit-Terminating Equipment ), то есть …
Как известно, PCI это пластмассовый cлот на материнской плате компьютера. Впервые он появился на Пентиум-1. Первоначально использовался для подключения видеокарт, но с конца 90-х видеоадаптеры …
В справочном материале приводятся схемы распиновки и подключения IP камер по витой паре с питанием к компьютеру, коммутатору или регистратору. Предупреждаем сразу, что это подходит …
Если витую пару (разъём rj45 на 8 проводов) обжать не по стандарту, то при большой длине сетевого кабеля, соединяемые устройства могут работать с большими потерями …
Прежде всего приведём несколько наиболее важных моментов при выборе кабелей и разъёмов профессионального звукового оборудования, а также их эксплуатации. Производитель Как и во многих других …
Уже давно на сайте 2 Схемы была опубликована статья про виды USB коннекторов, но так как вопросы продолжают поступать в редакцию, решено было написать более …
На основе сигнала с датчика массового расхода воздуха (ДМРВ) производится расчет циклового наполнение цилиндра, пересчитываемого в конечном итоге в длительность импульса открытия форсунок. Если он …
У каждого дома скопилось немало компьютерных вентиляторов: кулеров от процессора, видеокарты и блоков питания ПК. Их можно поставить на замену сгоревшим, а можно подключить к …
С необходимостью разобраться с подключением к компьютеру того или иного устройства сталкивается каждый, ведь сегодня ПК (ноутбук, планшет) есть у всех. А у компьютера есть …
Сегодня мы рассмотрим устройство и схемы систем зажигания на автомобили ВАЗ всех основных моделей. Поскольку карбюраторные версии ВАЗ это уже практически история, остановимся подробно на …
Датчик скорости – элемент электронной системы управления автомобиля. Именно от его показаний зависит, сколько топлива будет подаваться, сколько воздуха пойдет в обход дроссельной заслонки при …
Для контроля за системами автомобиль ГАЗ оборудован комбинацией приборов, в которой установлены контрольные приборы: указатель напряжения, тахометр, спидометр, указатель температуры двигателя, указатель давления масла, указатель …
Бензонасос на автомобиле предназначен для подачи топлива в камеру сгорания. Контролируется его работа при помощи реле. На ВАЗ (в зависимости от модели) агрегат для подачи …
Компания Apple не перестает ежегодно радовать новыми смартфонами iPhone. Данный гаджет многофункционален, удобный в использовании, имеет стильное дизайнерское оформление. Но, как и любая электронная техника, …
распиновка, схема подключения и программирование [Амперка / Вики]
Espruino Pixl.js — платформа для разработки со встроенным интерпретатором JavaScript. Плата выполнена в формфакторе Arduino R3: с одной стороны расположены контактные колодки для подключения шилдов, а с обраной графический LCD-дисплей.
Мозгом платы является модуль MDBT42Q с чипом Nordic nRF52840, который также обеспечивает беспроводную связь и прошивку по Bluetooth v5.0.
Подключение и настройка
Платформа поддерживает два типа подключения и отладки:
Беспроводное подключение
Шаг 1
Для старта подключите к плате Espruino Pixl.js линию питания и земли. Выберите один из нескольких вариантов:
- Батарейка CR2032 Портативный способ: вставьте батарейку формата CR2032 в батарейный отсек на плате.
- Контакты VIN
VINиGND. Диапазон входного напряжения от 3,5 до 16 вольт.
Шаг 2
Для работы с платой Espruino Pixl.js по беспроводному протоколу Bluetooth добавьте и настройте в Google Chrome среду программирования Espruino Web IDE.
Проводное подключение
Шаг 1
На плате пристутсвтует физический порт USB, но он предназначен только для питания платформы. В итоге, для коммуникации с компьютером нам понадобиться USB-UART преобразователь, а чтобы избавиться от проводов используйте переходник Troyka Slot Shield.
Шаг 2
Для работы с платой Espruino Pixl.js добавьте и настройте в Google Chrome среду программирования Espruino Web IDE.
Примеры работы
Рассмотрим несколько примеров с платформой Pixl.js.
Маячок на макетке
Во всех традициях DIY, мигнём светодиодом на 13 пине.
Что понадобится
Так как на платформе отсутвует встроенный светодиод, используем дополнительную расспыху:
Исходный код
Прошейти платформу скриптом ниже.
- example-led-blink.js
// переменная состояния светодиода var state = false; // каждую секунду переключаем светодиод на пине D13 setInterval(function() { state = !state; D13.write(state); }, 1000);
Маячок на модулях
Если вам скучно и неинтересно собирать схемы на макетке, используйте нашу экосистему Troyka-модулей: проапдейтим проект маячок на модулях.
Что понадобится
Так как на платформе отсутвует встроенный светодиод, используем дополнительную расспыху:
Исходный код
Прошейти платформу аналогичным скриптом проекта «маячок».
- example-led-blink.js
// переменная состояния светодиода var state = false; // каждую секунду переключаем светодиод на пине D13 setInterval(function() { state = !state; D13.write(state); }, 1000);
Игра «Динозавр из Google»
Платформа Pixl.js может похвастаться встроенным монохромным LCD-дисплеем с разрешением 128×64 пикселя. Разработчики платы также установили на платформу четыре пользовательских кнопки. Весь этот сет даёт возможность создавать простые игры на Pixl.js прямо из коробки без дополнительных комплектующих. Восоздадим игру из поиска Google, которая появляется при отсутсвии интренет соединения.
Исходный код
- example-dinosaur-game.js
var BTNL = BTN4; var BTNR = BTN3; var BTNU = BTN1; // Images can be added like this in Espruino v2.00 var IMG = { rex: [ Graphics.createImage(` ######## ########## ## ####### ########## ########## ########## ##### ######## # ##### # ####### ## ########## ### ######### # ############## ############## ############ ########### ######### ####### ### ## ## # # ## `), Graphics.createImage(` ######## ########## ## ####### ########## ########## ########## ##### ######## # ##### # ####### ## ########## ### ######### # ############## ############## ############ ########### ######### ####### ### ## ## ## # ## `), Graphics.createImage(` ######## # ###### # # ###### # ###### ########## ########## ##### ######## # ##### # ####### ## ########## ### ######### # ############## ############## ############ ########### ######### ####### ### ## ## # # # ## ## `), ], cacti: [ Graphics.createImage(` ## #### #### #### #### #### # # #### ### ### #### ### ### #### ### ### #### ### ### #### ### ### #### ### ### #### ### ### #### ### ########### ######### #### #### #### #### #### #### #### #### `), Graphics.createImage(` ## ## # ## ## ## # ## ## # ## ## # ## ## # ##### # #### # ##### #### ## ## ## ## ## ## ## `), ], }; IMG.rex.forEach((i) => (i.transparent = 0)); IMG.cacti.forEach((i) => (i.transparent = 0)); var cacti, rex, frame; function gameStart() { rex = { alive: true, img: 0, x: 10, y: 0, vy: 0, score: 0, }; cacti = [{ x: 128, img: 1 }]; var random = new Uint8Array((128 * 3) / 8); for (var i = 0; i < 50; i++) { var a = 0 | (Math.random() * random.length); var b = 0 | (Math.random() * 8); random[a] |= 1 << b; } IMG.ground = { width: 128, height: 3, bpp: 1, buffer: random.buffer }; frame = 0; setInterval(onFrame, 50); } function gameStop() { rex.alive = false; rex.img = 2; // dead clearInterval(); setTimeout(function () { setWatch(gameStart, BTNU, { repeat: 0, debounce: 50, edge: "rising" }); }, 1000); setTimeout(onFrame, 10); } function onFrame() { g.clear(); if (rex.alive) { frame++; rex.score++; if (!(frame & 3)) rex.img = rex.img ? 0 : 1; // move rex if (BTNL.read() && rex.x > 0) rex.x--; if (BTNR.read() && rex.x < 20) rex.x++; if (BTNU.read() && rex.y == 0) rex.vy = 4; rex.y += rex.vy; rex.vy -= 0.2; if (rex.y <= 0) { rex.y = 0; rex.vy = 0; } // move cacti var lastCactix = cacti.length ? cacti[cacti.length - 1].x : 127; if (lastCactix < 128) { cacti.push({ x: lastCactix + 24 + Math.random() * 128, img: Math.random() > 0.5 ? 1 : 0, }); } cacti.forEach((c) => c.x--); while (cacti.length && cacti[0].x < 0) cacti.shift(); } else { g.drawString("Game Over!", (128 - g.stringWidth("Game Over!")) / 2, 20); } g.drawLine(0, 60, 127, 60); cacti.forEach((c) => g.drawImage(IMG.cacti[c.img], c.x, 60 - IMG.cacti[c.img].height)); // check against actual pixels var rexx = rex.x; var rexy = 38 - rex.y; if ( rex.alive && (g.getPixel(rexx + 0, rexy + 13) || g.getPixel(rexx + 2, rexy + 15) || g.getPixel(rexx + 5, rexy + 19) || g.getPixel(rexx + 10, rexy + 19) || g.getPixel(rexx + 12, rexy + 15) || g.getPixel(rexx + 13, rexy + 13) || g.getPixel(rexx + 15, rexy + 11) || g.getPixel(rexx + 17, rexy + 7) || g.getPixel(rexx + 19, rexy + 5) || g.getPixel(rexx + 19, rexy + 1)) ) { return gameStop(); } g.drawImage(IMG.rex[rex.img], rexx, rexy); var groundOffset = frame & 127; g.drawImage(IMG.ground, -groundOffset, 61); g.drawImage(IMG.ground, 128 - groundOffset, 61); g.drawString(rex.score, 127 - g.stringWidth(rex.score)); g.flip(); } gameStart();
Теперь используя встроенные кнопки на плате Pixl, помогите динозавру Рексу бежать по пустныни и не врезаться в кактусы.
Элементы платы
Дисплей
На плате расположен монохромный LCD-дисплей JHD12864-G176BSW с разрешением 128×64 пикселей. Матрица экрана подключена к встроенному чипу ST7567, который занимается отрисовкой и другими параметрами дисплея. С основным контроллером, в нашем случае модуль MQBT42Q, дисплей общается по интерфейсу SPI.
Экран пригодиться для отображения показаний сенсоров и модулей в виде текста, графиков и диаграмм.
Для работы с дисплеем используйте библиотеку Espruino Graphics, в которой собраны примеры отрисовки графики от пикселя до полноценных битовых изображений.
Модуль MDBT42Q
Платформа Espruino Pixl.js выполнена на модуле MDBT42Q, который включает в себя 32-битный микроконтроллер Nordic nRF52840 на архитектуре ARM Cortex-M4 с тактовой частотой 64 МГц, 512 КБ Flash-памяти и 64 КБ SRAM-памяти.
Чип Nordic nRF52840 так же обеспечивает связь Bluetooth v5.0 в диапазоне 2,4 ГГц и поддерживает энергосберегающий протокол Bluetooth Low Energy (BLE). Всё это позволяет прошивать и отлаживать платформу Pixl.js через Espruino Web IDE прямо по воздуху.
Пользовательские кнопки
На плате расположено четыре кнопки, которые пригодятся для создания и теста простых программ, без подключения дополнительных тактильных сенсоров.
| Имя кнопки | Назначение |
|---|---|
| BTN1 | Пользовательская кнопка подключена к h2 цифровому пину микроконтроллера. Используйте определение BTN1 для работы с кнопкой. |
| BTN2 | Пользовательская кнопка подключена к h3 цифровому пину микроконтроллера. Используйте определение BTN2 для работы с кнопкой. |
| BTN3 | Пользовательская кнопка подключена к h4 цифровому пину микроконтроллера. Используйте определение BTN3 для работы с кнопкой. |
| BTN4 | Пользовательская кнопка подключена к h5 цифровому пину микроконтроллера. Используйте определение BTN4 для работы с кнопкой. |
Кнопка BTN1 также может переводить плату в DFU-режим. Это позволит перепрошить или обновить интерпретатор JavaScript в микроконтроллер без дополнительного программатора. Для перевода в DFU-режим:
Отключите питание от платформы.
Зажмите кнопку BTN1.
Подключите питание к платформе и отпустите кнопку.
Разъём micro-USB
Понижающий регулятор 3V3
Линейный понижающий регулятор напряжения MIC5225-3V3 обеспечивает питание дисплея, модуля MDBT42Q и другой логики платы при подключении питания через пин VIN. Диапазон входного напряжения от 3,6 до 16 вольт. Выходное напряжение 3,3 В с максимальным выходным током 150 мА.
Гнездо для батарейки
На плате расположен отсек для батарейки CR2032, которая обеспечивает работу платформы в портативном режиме. В автономном варианте батарейка сможет протянуть и обеспечить питание платфомы Pixl.js до 20 дней.
Контакты SWD
Колодки SWD предназначены для подключения программатора и отладчика ST-Link.
Распиновка
Плата Espruino Pixl.js выполнена в формфакторе Arduino R3, что даёт полную совместимость с Arduino Shields.
Пины питания
VIN Входной пин для подключения внешнего источника напряжения в диапазоне от 3,5 до 16 вольт.
VOUT На платформе Pixl.js отсутствует линия питания 5 вольт, поэтому по умолчанию пин VOUT отключён. Но вы можете подключить к нему одну из линий питания на выбор: VIN или 3V3.
- 3V3 Выходной пин от стабилизатора напряжения с выходом 3,3 вольта и максимальных током 150 мА. Регулятор обеспечивает питание модуля MDBT42Q и другой вспомогательной логики платы.
GND Выводы земли.
Порты ввода/вывода
В отличие от большинства плат Arduino, родным напряжением Espruino Pixl.js является 3,3 В, а не 5 В. Выходы для логической единицы выдают 3,3 В, а в режиме входа ожидают принимать не более 3,3 В. Более высокое напряжение может повредить микроконтроллер!
Будьте внимательны при подключении периферии: убедитесь, что она может корректно функционировать в этом диапазоне напряжений.
Цифровые входы/выходы 20 пинов:
D0–D13иA0–A5
Логический уровень единицы — 3,3 В, нуля — 0 В. Максимальный ток выхода — 15 мА. К контактам подключены подтягивающие резисторы, которые по умолчанию выключены, но могут быть включены программно.ШИМ все пины ввода-вывода
Позволяет выводить аналоговые значения в виде ШИМ-сигнала. Разрядность ШИМ установлена в 12 бит. Платформа поддерживает 4 канала аппаратного ШИМ-сигнала, каждый последующий становиться программным.АЦП 7 пинов:
A0–A5,D3иD4
Позволяет представить аналоговое напряжение в виде цифровом виде. Разрядность АЦП установлена в 12 бит.NFC
Для общения с картами общественного транспорта, смартфонами и планшетами, поддерживающими технологию Near Field Communication. Антенна уже встроеная в плату Pixl.js и подключена к внутренним пинам модуля MQBT42Q.
Интерфейсы
Каждый пин ввода-вывода платформы поддерживает аппаратные интерфейсы.
| Интерфейс | Количество | Назначение |
|---|---|---|
| I²C | 1 | Используется для общения с периферией по параллельному интерфейсу «I²C». |
| SPI | 1 | Для общения с периферией по последовательному интерфейсу «SPI». |
| UART/Serial | 1 | Для общения с периферией по интерфейсу «UART». |
Принципиальная и монтажная схемы
Габаритный чертёж
Характеристики
Модуль: MDBT42Q с чипом nRF52832
Ядро: 32-битный ARM Cortex M4
Частотный диапазон связи: 2,4 ГГц
Стандарт связи: Bluetooth v5.0 с поддержкой BLE
Тактовая частота: 64 МГц
Flash-память: 512 КБ
SRAM-память: 64 КБ
Индикация: встроенный LCD-экран
Пинов ввода-вывода всего: 20
Напряжение логических уровней: 3,3 В
Пины с АЦП: 7
Разрядность АЦП: 12 бит
Пины с ШИМ: 20
Разрядность ШИМ: 12 бит
Аппаратных интерфейсов SPI: 1
Аппаратных интерфейсов I²C / TWI: 1
Аппаратных интерфейсов UART / Serial: 1
Максимальный ток с пина или на пин: 15 мА
Максимальный выходной ток пина 3V3: 150 мA
Входное напряжение через пин Vin: 3,5–16 В
Габариты платы: 60×53 мм
Дисплей
Модель: JHD12864-G176BSW
Диаганаль: 2,4 дюйма
Разрешение: 128×64
Цвет: монохромный
Цвет подсветки: белая
Контроллер: ST7567
Интерфейс: SPI
Ресурсы
Розетка под интернет кабель: схема распиновки и инструкция
Сегодня в статье мы рассмотрим три вида розеток под интернет кабель. Расскажу, как обжимать каждую в походных условиях, когда не хватает инструментов. А также какую розеточку лучше выбрать для домашнего использования и подключения. Надеюсь, кабель у вас уже проложен. Далее обычно провода идут в специальные монтажные коробки, если вы собираетесь использовать внутренние розетки. Или прокладываются отдельно в кабель-каналы во внешнюю розеточку (тип «Коробочка»).
Постарайтесь оставить как можно больше провода лучше всего от 15-20 см. На всякий случай – вдруг придётся переобжимать провода. Теперь давайте обратим наше внимание на цвет распиновки или обжима, который в данный момент существует.
Их существует два вида «А» и «В». Если кто, когда-нибудь обжимал провода, то знает, что для обжима кабеля используют именно «А» система. Но вот для розеток используется именно схема «B». И использовать мы будем именно её. Теперь я расскажу – как подключить интернет кабель к розетке на примере разных моделей.
ВНИМАНИЕ! Если у вас с одной стороны идёт сетевая розеточка, а с другой стороны вы хотите обжать обычный коннектор RJ-45. То розетку обжимаем по «B» типу, а вот провод как обычно по «A».
Стандартная модель CAT5 E
- Для начала разбираем розеточку. Нам нужно отделить внутреннюю сердцевину или коннектор от основного блока. Внутренняя сердцевина необходима для обжима провода и в ней и хранится разъём RJ-45. Она выглядит как на фото сверху.
- Прикручиваем металлический суппорт — это сама основа, где будет крепиться весь механизм.
- Снимаем верхнюю оплётку на расстояние до 5 см. Теперь просто по схеме «B», внимательно вставляем каждый провод. Если смотреть на картинку – то вставляем провода в такой последовательности.
- Спереди: бело-оранжевый, оранжевый, бело-зелёный, зелёный;
- Сзади: Бело-синий, синий, бело-коричневый, коричневый.
- После этого сверху надеваем крышку и провода сами врежутся в пазы, задействовав специальные внутренние ножи.
- Осталось вставить сам блок внутрь основы и прикрутить всю основу к суппорту. С этим я думаю вы справитесь.
Обжим внешней модели
Выглядит она как обычная коробочка, в которой может быть как один, так и несколько разъёмов для сетевого подключения.
- Аккуратно снимите верхнюю крышку.
- И так смотрим на схему обжимки. У нас это схема «B» подключение интернет кабеля происходит по цветам на картинке:
- Левая сторона (сверху вниз) – бело-оранжевый, оранжевый, бело-зелёный, зеленый;
- Правая сторона (сверху вниз) – бело-синий, синий, бело-коричневый, коричневый.
- Теперь оголяем провод, снимая верхнюю оплётку. Каждый проводок по схеме вставляем в паз. Но тут очень важно, для это используют специальной приспособление – кросс-нож. Он вдавливает проводок внутрь и сразу отрезает лишнее.
- Если такого приспособления нет, то можно использовать тонкую отвертку или ещё лучше нож для бумаги. Но будьте аккуратны – таким образом можно легко сломать розетку. В самом конце прикручиваем розетку к основанию саморезом.
Как обжать VICO?
Эти модели я сам лично устанавливал к себе домой для подключения телевизора через роутер к интернету. Там принцип примерно одинаковый, как и на прошлых вариантах, но есть небольшая особенность, о которой я хотел бы рассказать. Схема «распайки» такая же «B» и находится она снизу (если смотреть на картинку, то сверху):
- Коричневый
- Бело-коричневый
- Зелёный
- Бело-зелёный
- Синий
- Бело-синий
- Оранжевый
- Бело-оранжевый
А теперь важный момент. Так как ножи внутри стоят в разнобой, то вставлять сразу все провода не стоит – некоторые могут при обжимке вылететь или попасть в соседний паз. Поэтому можно сделать просто:
- Вставляете первые два провода
- Потом сверху прихлопываете пластиковой крышкой, для обжима.
- Далее открываете крышку и смотрите, чтобы проводки были обжаты.
- Ну и далее остальные провода.
Это совет для тех, кто только начал обжимать эти розетки и не набрался сноровки для одновременного обжатия всех 4 пар – так будет меньше матов и нервов. Как только розеточка будет обжата, вставляет её в основание и прикручиваем к коробке саморезами.
Как проверить подключение
Как не странно, но нигде не сказано, что проверять «B» распиновку на розетках, можно обычным сетевым проводом, шнуром, который обжат по схеме «А». Ещё раз повторю, что все сетевые розетки обжимаются по схеме «B», а провод мы используем с обжимкой на схему «А». Без разницы, что вы подключаете, маршрутизатор, роутер, коммутатор или подключаетесь на прямую к серверу. Далее можно использовать обычный тестер. Вставляем провода в разные части устройства и включаем.
Эл. схемы, схемы подключения, распиновки и др. (с. 111)
| цитата: |
| значит никакого моста в приборке нет и шины никак не связаны между собой. |
Ошибаетесь , вот информация из ETIS:
Общая информация
В модуле системы обмена данных ( в системе шины данных) модули различных систем соединены друг с другом через один или несколько проводов.
Система шины данных существует для того, чтобы передавать данные между присоединенными модулями, а также между присоединенными модулями иобщей системой диагностики (WDS ).
Вместо простых команд ВКЛ/ВЫКЛ в системе шины данных предаются комплектные блоки данных. Такие блоки данных содержат наряду с собственно информацией также данные об адресах модулей, к которым производится обращение, размер блока, а также информацию для контроля содержания каждого отдельного блока данных.
Системы шин данных дают следующие преимущества:
простой обмен данными между модулями посредством стандартизированного протокола
меньшее число датчиков и разъемов
возможность улучшения диагностики
более низкую стоимость
Через стандартный 16-полюсный разъем (DLC) WDS (соединяется) с различными системами шин данных и питанием. Через DLC сигнал передается при программировании модуля.
Если у системы шин данных обрываются один или несколько проводов или имеет место короткое замыкание на массу или появляется напряжение, связь между модулями и с ( WDS ) нарушается или исчезает полностью.
Чтобы восстановить связь между собой, модули отдельных систем должны общаться на одном языке. Такой язык называется протоколом.
Компания Ford в настоящее время применяет четыре различных системы шин данных. В зависимости от модели автомобиля и его оборудования применяются все три системы. Каждая из систем шин данных имеет свой собственный протокол.
Системы шин данных:
шина Standard Corporate Protocol (SCP). Эта шина имеет два витых провода. Шина служит для связи между прибора управления силовым агрегатом (PCM) и (WDS) через DLC. Для программирования PCM в зависимости от марки двигателя и года его выпуска применяется третий кабель, ACP-шина. Эта шина применяется исключительно вместе с SCP-шиной.
шина стандарта ISO 9141 Международной организации по стандартизации. Эта шина состоит из отдельного провода и служит исключительно для связи между модулями и WDS. Через шину стандарта ISO 9141 считываются данные различных накопителей неисправностей.
Шина LIN (Local Interconnect Network) является стандартом экономичной связи между интеллектуальными датчиками и исполнительными устройствами автомобиля. подсеть управляющих устройств (LIN) повсеместно применяется там, где не требуется диапазон и универсальность шины CAN. Спецификация LIN содержит в себе протокол LIN – единый формат для описания общей сети LIN и интерфейс между LIN и приложением. LIN состоит из задающего модуля LIN и одного или нескольких исполнительных модулей LIN. Для управления доступом к шине LIN использует принцип «Задающий модуль-Исполнительный модуль (Master-Slave)». Решающее преимущество этого принципа заключается в том, что в исполнительном модуле для работы с шиной требуются незначительные ресурсы (производительность центрального процессора, ROM, RAM). Задающий модуль реализуется в управляющем модуле или шлюзе, которые имеют необходимые для этого ресурсы. Любая связь инициируется задающим модулем. Поэтому сообщение всегда состоит из заголовка, который создает задающий модуль, и ответа исполнительного модуля. Скорость передачи данных составляет до 20 Кбит/с. Задающее устройство LIN располагает информацией о временной последовательности всех передаваемых данных. Эти данные передаются от соответствующего исполнительного модуля LIN (например, от ультразвуковых датчиков), если их запрашивают у задающего устройства LIN. LIN является однопроводной шиной, т.е. данные передаются только по одной жиле кабеля. Обычно по этому же кабелю подается питающее напряжение. Масса питающего напряжения является одновременно массой линии передачи данных. В шине LIN не применяются нагрузочные резисторы.
Шина Controller Area Network (CAN) Эта шина состоит из двух витых проводов и работает последовательно (данные переносятся друг за другом). Шина служит для связи модулей между собой, а также для связи между модулями и WDS. Модули присоединены к шине последовательно. Здесь могут легко присоединяться новые модули, без изменения прокладки кабелей. Передаваемые данные принимаются каждым модулем, подключенным к CAN (сети управляющих устройств). Так как каждый пакет данных имеет идентификатор, в котором наряду с обозначением содержания устанавливается также приоритет сообщения, каждый модуль может определить, являются ли данные важными для самой обработки информации. Благодаря этому несколько модулей одновременно могут работать с одним пакетом данных и получать данные. При этом обеспечивается ситуация, при которой важные данные (например, от антиблокировочной системы (ABS)) направляются в первую очередь. Другие модули могут передавать данные на шину данных только в том случае, если информация пришла с высоким приоритетом.
Для обеспечения высокой помехоустойчивости на шине (CAN) установлены два нагрузочных резистора сопротивлением 120 Ом. Указанные резисторы установлены в первом модуле присоединенном к шине CAN и последнем модуле, присоединенном к шине CAN, и применяются для устранения помех, а также для снятия пиков напряжения. Для обеспечения надежной работы системы шин данных модули должны присоединяться с встроенным нагрузочным сопротивлением.
Преимуществами CAN-шины являются:
минимизация затрат на разводку кабелей.
высокая помехозащищенность (защищенность от неисправностей/отказов).
прочность.
возможность расширения.
выстраивание приоритетов информации.
низкая стоимость.
автоматическое повторение поврежденной информации.
самостоятельный контроль системы и возможность автоматического отключения поврежденных модулей от шины данных.
На автомобилях, изготовленных, начиная с модельного года 2003.75, в зависимости от модели применяется дополнительно и вторая система шин CAN. Эта шина отличается в основном только более низкой скоростью передачи данных и в настоящее время применятся в основном для комфортной электроники. Для возможности различения отдельных систем CAN систему CAN с высокой скоростью передачи данных обозначают как высокоскоростную (HS) CAN, а систему CAN с более низкой скоростью передачи данных обозначают как среднескоростную (MS) CAN. Как у всех систем шин CAN у среднескоростной шины CAN для повышения помехоустойчивости установлены два нагрузочных резистора на 120 Ом. Для осуществления связи между модулями высокоскоростной шины CAN и среднескоростной шины CAN применяется модуль с обеими системами шин данных. Связь обеих систем шин данных обозначается как gateway (шлюз). В таком gateway полученные данные преобразуются в соответствии со скоростью, необходимой для соответствующей шины данных, и передаются дальше. Таким образом достигается оптимальное распределение информации между обеими системами шин данных.
Элементы сети.
На моделях Focus CMax, а также на моделях Focus, изготовленных начиная с модельного года 2005, в зависимости от варианта оснащения применяются две системы шин передачи данных.
Количество модулей, подсоединенных к двум системам шин передачи данных CAN, зависит от варианта оснащения автомобиля.
Модуль (RCM)
1-компакт-диск (CD) — чейнджер2-Автомобили, оснащенные навигационной системой с DVD и сенсорным дисплеем
3-Сенсорный дисплей
4-Панель управления аудиосистемой
5-Модуль дополнительных мобильных электронных устройств (PSE)
6-Модуль устройств пассивной безопасности заднего сиденья
7-Модуль — электронного регулирования температуры (EATC)
8-Модуль RCM
9-Многофункциональный электронный модуль (GEM)
10-Модуль передней левой двери
11-Модуль передней правой двери
12-Модуль правой задней двери — все, кроме кабриолета
13-Модуль левой задней двери — все, кроме кабриолета
14-Дополнительный отопитель, работающий на топливе/программируемый дополнительный отопитель, работающий на топливе
15-Модуль помощи при парковке.
16-Модуль системы блокировки без ключа
17-Электронный щиток приборов
18-Среднескоростная шина CAN
19-(Диагностический разъем DLC)
20-(РСМ)
21-Прибор управления КПП (TCM)
22-Модуль электрогидравлического усилителя рулевого управления (EHPS)
23-Модуль ABS или модуль электронной программы стабилизации
24-Модуль управления системой подачи топливной присадки
25-Модуль наружного освещения (LCM) — автомобили с газоразрядными лампами или автомобили с динамической системой головного освещения
26-Высокоскоростная шина CAN
27-Модуль стояночного тормоза с электронным управлением (EPB)
28-Дополнительный щиток приборов
29-Нагрузочные резисторы
30-Модуль управления складным верхом кабриолета
У автомобилей Focus CMax, а также у автомобилей Focus с MY2005 выпуска вследствие возросшего числа модулей и как следствие возросшего объема передаваемых данных применяется вторая CAN-шина (среднескоростная CAN-шина). Указанная шина работает с более низкой скоростью и служит в основном для связи в области комфортной электроники.
Для возможности обмена данными между высокоскоростной и низкоскоростной CAN-шинами применяется gateway. Шлюз служит в качестве интерфейса между обеими системами шин передачи данных CAN и установлен в электронном щитке приборов.
Модули, присоединенные к обеим системам шин данных CAN, зависят от варианта оборудования автомобиля.
В PCM и в электронном щитке приборов установлены соответственно по одному нагрузочному резистору сопротивлением 120 Ом высокоскоростной CAN-шины.
В GEM и в электронном щитке приборов установлены соответственно по одному нагрузочному резистору сопротивлением 120 Ом высокоскоростной CAN-шины.
Указанные нагрузочные сопротивления служат для защиты от помех. Для обеспечения надежной работы системы шин данных модули должны всегда присоединяться с встроенным нагрузочным сопротивлением.
LIN — кабриолет
1-Диагностический разъем DLC2-Среднескоростная шина CAN
3-Модуль RCM
4-Модуль RCM
5-Модуль RCM
6-Задний модуль (PDM)
7-Задний модуль (DDM)
8-Переключатель замка двери — сторона водителя
| Bosch M1.5.4 Январь 5.1.1 1411020 1411020-70 | Bosch M1.5.4 (40/60) Январь-5.1 (41/61) Январь 5.1.2 (71) | Bosch MP 7.0 | |
| 1 | Зажигание 1-4 цилиндра. | Зажигание 1-4 цилиндра. | Зажигание 1-4 цилиндра. |
| 2 | . | Массовый провод зажигания. | . |
| 3 | Реле топливного насоса | Реле топливного насоса | Реле топливного насоса |
| 4 | Шаговый двигатель PXX(A) | Шаговый двигатель PXX(A) | Шаговый двигатель PXX(A) |
| 5 | Клапан продувки адсорбера. | Клапан продувки адсорбера. | |
| 6 | Реле вентилятора системы охлаждения | Реле вентилятора системы охлаждения | Реле вентилятора левого (только на Нивах) |
| 7 | Входной сигнал датчика расхода воздуха | Входной сигнал датчика расхода воздуха | Входной сигнал датчика расхода воздуха |
| 8 | . | Входной сигнал датчика фазы | Входной сигнал датчика фазы |
| 9 | Датчик скорости | Датчик скорости | Датчик скорости |
| 10 | . | Общий. Масса датчика кислорода | Масса датчика кислорода |
| 11 | Датчик детонации | Датчик детонации | Вход 1 датчика детонации |
| 12 | Питание датчиков. +5 | Питание датчиков. +5 | Питание датчиков. +5 |
| 13 | L-line | L-line | L-line |
| 14 | Масса форсунок | Масса форсунок | Масса форсунок. Силовая «земля» |
| 15 | Управление форсунками 1-4 | Нагреватель датчика кислорода | Лампа CheckEngine |
| 16 | . | Форсунка 2 | Форсунка 3 |
| 17 | . | Клапан рециркуляции | Форсунка 1 |
| 18 | Питание +12В неотключаемое | Питание +12В неотключаемое | Питание +12В неотключаемое |
| 19 | Общий провод. Масса электроники | Общий провод. Масса электроники | Общий провод. Масса электроники |
| 20 | Зажигание 2-3 цилиндра | Зажигание 2-3 цилиндра | |
| 21 | Шаговый двигатель PXX(С) | Шаговый двигатель PXX(С) | Зажигание 2-3 цилиндра |
| 22 | Лампа CheckEngine | Лампа CheckEngine | Шаговый двигатель PXX(B) |
| 23 | . | Форсунка 1 | Реле кондиционера |
| 24 | Масса шагового двигателя | Масса выходных каскадов шагового двигателя | Силовое заземление |
| 25 | Реле кондиционера | Реле кондиционера | . |
| 26 | Шаговый двигатель PXX(B) | Шаговый двигатель PXX(B) | Масса датчиков ДПДЗ, ДТОЖ, ДМР |
| 27 | Клемма 15 замка зажигания | Клемма 15 замка зажигания | Клемма 15 замка зажигания |
| 28 | . | Входной сигнал датчика кислорода | Входной сигнал датчика кислорода |
| 29 | Шаговый двигатель PXX(D) | Шаговый двигатель PXX(D) | Входной сигнал датчика кислорода 2 |
| 30 | Масса датчиков ДМРВ, ДТОЖ, ДПДЗ, ДД, ДПКВ | Масса датчиков ДМРВ, ДТОЖ, ДПДЗ, ДД, ДПКВ | Вход 2 датчика детонации |
| 31 | . | Резервный выход сильноточный | Входной сигнал датчика неровной дороги |
| 32 | . | . | Сигнал расхода топлива |
| 33 | Управление форсунками 2-3 | Нагреватель датчика кислорода. | . |
| 34 | . | Форсунка 4 | Форсунка 4 |
| 35 | . | Форсунка 3 | Форсунка 2 |
| 36 | . | Выход. Клапан управления длиной впускной трубы. | Главное реле |
| 37 | Питание. +12В после главного реле | Питание. +12В после главного реле | Питание. +12В после главного реле |
| 38 | . | Резервный выход слаботочный | . |
| 39 | . | . | Шаговый двигатель РХХ (С) |
| 40 | . | Резервный вход дискретный высокий | . |
| 41 | Запрос включения кондиционера | Запрос включения кондиционера | Нагреватель датчика кислорода 2 |
| 42 | . | Резервный вход дискретный низкий | . |
| 43 | Сигнал на тахометр | Сигнал на тахометр | Сигнал на тахометр |
| 44 | СО — потенциометр | Датчик температуры воздуха | . |
| 45 | Датчик температуры охлаждающей жидкости | Датчик температуры охлаждающей жидкости | Датчик температуры охлаждающей жидкости |
| 46 | Главное реле | Главное реле | Реле вентилятора охлаждения |
| 47 | Разрешение программирования | Разрешение программирования | Вход сигнала запроса включения кондиционера |
| 48 | Датчик положения коленвала. Низкий уровень | Датчик положения коленвала. Низкий уровень | Датчик положения коленвала. Низкий уровень |
| 49 | Датчик положения коленвала.Высокий уровень | Датчик положения коленвала.Высокий уровень | Датчик положения коленвала.Высокий уровень |
| 50 | . | Датчик положения клапана рециркуляции | Разрешение программирования |
| 51 | . | Запрос на включение гидроусилителя руля | Нагреватель ДК |
| 52 | . | Резервный вход дискретный низкий | . |
| 53 | Датчик положения дроссельной заслонки | Датчик положения дроссельной заслонки | Датчик положения дроссельной заслонки |
| 54 | Сигнал расхода топлива | Сигнал расхода топлива | Шаговый двигатель РХХ (D) |
| 55 | K-line | K-line | K-line |
Цветовая схема распиновки витой пары RJ-45
Спецификацией EIA/TIA-568 предусмотрено несколько способов распиновки. Один взятый за основу стандартный кабель можно адаптировать для Интернет-соединения, проводного сопряжения двух компьютеров, подключения к роутеру, хабу и свичу. Знания о том, как правильно это сделать, могут сэкономить пользователю время и деньги.
Выбрав правильную схему подключения, пользователь может самостоятельно превратить кабель в удобный для него вариант. Если ему необходим кабель для Интернета, нужно воспользоваться одним из двух одинаково уместных и эффективных вариантов обжима.
Зачем нужна цветовая схема
У каждой витой пары есть плотная однотонная оболочка, внутри которой скрываются более тонкие жилы. В нашем случае это 8 проводов, каждый из которых имеет пару: синий и сине-белый, оранжевый и оранжево-белый, зелёный и зелёно-белый, красный и красно-белый. Существуют и другие варианты с большим количеством пар. От их числа напрямую зависит частотный диапазон.
Иногда для создания сети поставляется уже готовый провод, но его длины зачастую недостаточно. При монтаже приходится использовать стандартную витую пару, которую легко превратить в кабель любой конфигурации. Главное – зажать разноцветные жилы в правильной последовательности.
Однако этот метод с развитием интернет-технологий устарел. Сегодня компьютеры без проблем распознают различные цветовые схемы, и важно лишь сделать так, чтобы зажатые проводки на разных концах кабеля совпадали по цвету. В противном случае соединение не будет установлено.
Как обжать витую пару для подключения к Интернету
Есть два типа маркировки, которые взаимозаменяемы. Чаще всего встречается B, но отжать витую пару по типу A тоже можно, и это никак не скажется на качестве соединения lan сети.
- Тип B: красный-зелёный-синий-оранжевый | оранжевый-синий-зелёный красный.
- Тип A: красный-оранжевый-синий-зелёный | зеленый-синий-оранжевый-красный.
Главное – чтобы цвета совпадали с двух сторон. В остальном же выбор зависит только от ваших предпочтений.
Сегодня фирмы-производители создают и более дешевые, двухпарные витые пары специально для подключения к Интернету. Это обусловлено тем, что в 90% кабельных линий 3 и 4 провода не используются вообще. Такая экономия в большинстве случаев оправдана, а подключение по цветовой схеме гораздо проще.
Электрическая схема типа B не меняется, но вместо зелёной пары необходимо обжать синюю. Это выглядит следующим образом:
- Тип B: оранжевый-синий | синий-оранжевый.
- Тип A: синий-оранжевый | оранжевый-синий.
Подключение локальной lan сети для нескольких компьютеров
Такое подключение можно создать в офисе для быстрого обмена данными или обеспечить таким образом игру по локальной сети для двух и более домашних компьютеров. Для создания сетевого соединения между двумя устройствами достаточно соединить их витой парой, вставив концу кабелей в сетевые порты каждого.
Такой кабель нужен и для работы со старым сетевым оборудованием. В данном случае концы отжимаются по разным схемам. Чтобы выполнить распиновку правильно, понадобятся специальные клещи. Но профессиональный инструмент стоит недешево, и приобретать его ради однократного использования бессмысленно.
Существуют способы отжать проводки и без них, но это гораздо сложнее, особенно неподготовленному пользователю. Однако сделать это можно при помощи обычной отвёртки. Проводки сначала аккуратно обрезаются под прямым углом и опиливаются для ровности, а затем их необходимо вдавить в специальные зажимы.
В каких случаях нельзя обойтись без использования цветной схемы
В современном оборудовании, компьютерах и ноутбуках разбивка по цветам не играет практической роли. Если вы недавно приобрели роутер и хотите подключить к нему сделанный из витой пары кабель, сделать это можно и без следования чёткой схеме. Это касается и соединения кабельным способом двух современных компьютеров или ноутбуков. Главное – обеспечить одинаковую последовательность и выполнить обжим аккуратно. Тогда всё будет корректно работать, а вы не потратите время и деньги на поиск альтернативы.
Если ваши компьютеры очень старые, но их по каким-то причинам необходимо объединить в сеть (для игр по ней или передачи данных), любой провод не подойдёт. Это касается не только ПК. Другие устройства, такие как маршрутизаторы, невозможно подключить витой парой, распиновка которой была проведена по несоответствующей стандарту схеме. Не получится и провести интернет через неправильно обжатый кабель к старому компьютеру.
nnvp
| Распиновка LR OMEGAS (OBD) 4 цил. | |||||||
| Код электропроводки | KF194 | Обзор | «02» | ||||
| Код продукта | LRE194 | Дата | 25 11 02 | ||||
| Разъeм | CT5690 SICMA | Настоящее издание аннулирует предыдущее | |||||
| ЦВЕТ | ОПИСАНИЕ | ПИН | ПИН | ОПИСАНИЕ | ЦВЕТ | ||
| Оранжевый | Газовая форсунка B | 28 | 56 | Газовая форсунка D | Коричневый | ||
| Желтый | Газовая форсунка A | 27 | 55 | Газовая форсунка C | Красный | ||
| Черный | Плюс газовых форсунок | 26 | 54 | Плюс газовых форсунок | Черный | ||
| Бело-черный | Масса электромагнитного клапана газа 2(мультиклапана) | 25 | 53 | Масса ЭБУ | Черный | ||
| Синий и бело-синий | Электромагнитный клапан газа | 24 | 52 | Масса электромагнитного клапана газа | Черный | ||
| Не используется | 23 | 51 | Не используется | ||||
| Черный | Логическая масса | 22 | 50 | Масса переключателя | Черный | ||
| Черный | Масса датчика уровня | 21 | 49 | Питание переключателя | Красный | ||
| Бело-красный | «+5V» стабилизация датчика уровня топлива (МЕТАН) | 20 | 48 | Переключатель | Синий | ||
| Зеленый | Питание датчика уровня | 19 | 47 | Последовательный интерфейс(переключатель) | Коричневый | ||
| Белый | Датчик уровня (сигнальный) | 18 | 46 | Не используется | |||
| Зеленый | K-LINE | 17 | 45 | CAN-L | Желто-серый | ||
| Не используется | 16 | 44 | CAN-H | Желто-зеленый | |||
| Красно-черный | 12V Аккумулятора | 15 | 43 | 12V Аккумулятора | Красно-черный | ||
| ЦВЕТ | ОПИСАНИЕ | ПИН | ПИН | ОПИСАНИЕ | ЦВЕТ | ||
| Черный | Определение типа газовой форсунки:MED-(+5B),KEIHIN-(масса),MATRIX-(не подключен) | 14 | 42 | Обороты двигателя (RPM) | Коричневый | ||
| Фиолетовый | Вход 1-го лямбда-зонда | 13 | 41 | Выход 1-го лямда-зонда | Серый | ||
| Не используется | 12 | 40 | Не используется | ||||
| Бело-красный | Питание шины | 11 | 39 | Заземление шина | Черный | ||
| Розово-черный | RX шина | 10 | 38 | ТX шина | Розовый | ||
| Бело-красный | 5V питание датчика давления | 9 | 37 | Масса датчика давления | Черный | ||
| Голубо-черный | Датчик давления газа(сигнал) | 8 | 36 | Датчик давления в коллекторе (МАР) | Желто-оранжевый | ||
| Не используется | 7 | 35 | Не используется | ||||
| Оранжево-черный | Датчик температуры газа | 6 | 34 | Масса датчика температуры О. Ж. | Черный | ||
| Красно-белый | 12V замка зажигания | 5 | 33 | Температура охлаждающей жидкости | Оранжевый | ||
| Черно-желтый | Бензиновая форсунка D (в сторону ЭБУ) | 4 | 32 | Бензиновая форсунка D (в сторону форсунки) | Желтый | ||
| Черно-зеленый | Бензиновая форсунка C (в сторону ЭБУ) | 3 | 31 | Бензиновая форсунка C (в сторону форсунки) | Зеленый | ||
| Крано-черный | Бензиновая форсунка B (в сторону ЭБУ) | 2 | 30 | Бензиновая форсунка B (в сторону форсунки) | Красный | ||
| Сине-черный | Бензиновая форсунка A (в сторону ЭБУ) | 1 | 29 | Бензиновая форсунка A (в сторону форсунки) | Синий | ||
16×2 | Сопряжение ЖК-дисплея 16×2 с Arduino
Жидкокристаллические дисплеи (ЖКД) можно встретить повсюду вокруг нас. Компьютеры, калькуляторы, телевизоры, мобильные телефоны, цифровые часы используют какой-то дисплей для отображения времени.
ЖК-экран — это электронный дисплейный модуль, который использует жидкие кристаллы для создания видимого изображения. ЖК-дисплей 16 × 2 — это очень простой модуль, обычно используемый в домашних условиях и схемах. Формат 16 × 2 переводит на дисплей 16 символов в строке в 2 таких строки.На этом ЖК-дисплее каждый символ отображается в матрице 5 × 7 пикселей.
16X2 Распиновка ЖК-дисплея
|
№ пина |
Функция |
Имя |
| 1 |
Земля (0 В) |
Земля |
| 2 |
Напряжение питания; 5 В (4,7 — 5,3 В) |
Vcc |
| 3 |
Регулировка контрастности; Лучше всего использовать переменный резистор, например, потенциометр.К этому выводу подключен выход потенциометра. Поверните ручку потенциометра вперед и назад, чтобы отрегулировать контрастность ЖК-дисплея. |
Vo / VEE |
| 4 | Выбирает регистр команд при низком уровне и регистр данных при высоком | RS (выбор регистра) |
| 5 | Младший для записи в реестр; Высокая для чтения из регистра | Чтение / запись |
| 6 | Отправляет данные на выводы данных при подаче импульса от высокого к низкому; Для выполнения инструкции требуется подача дополнительного напряжения, и для этой цели используется сигнал EN (разрешение).Обычно мы устанавливаем en = 0, когда мы хотим выполнить инструкцию, мы делаем ее высоким en = 1 на несколько миллисекунд. После этого снова заземляем, то есть en = 0. | Включить |
| 7 | 8-битные выводы данных | DB0 |
| 8 | DB1 | |
| 9 | DB2 | |
| 10 | DB3 | |
| 11 | DB4 | |
| 12 | DB5 | |
| 13 | DB6 | |
| 14 | DB7 | |
| 15 | Подсветка VCC (5V) | светодиод + |
| 16 | Заземление подсветки (0 В) | светодиод — |
RS (выбор регистра)
ЖК-дисплей формата 16X2 имеет два регистра, а именно: команду и данные.Выбор регистра используется для переключения с одного регистра на другой. RS = 0 для регистра команд, тогда как RS = 1 для регистра данных.
Регистр команд: Регистр команд хранит командные инструкции, передаваемые на ЖК-дисплей. Команда — это инструкция ЖК-дисплею для выполнения заранее определенной задачи. Примеры вроде:
- инициализация
- очистка экрана
- установка позиции курсора
- управление дисплеем и т. Д.
Обработка команд происходит в регистре команд.
Регистр данных: Регистр данных хранит данные, которые должны отображаться на ЖК-дисплее. Данные представляют собой значение ASCII символа, отображаемого на ЖК-дисплее. Когда мы отправляем данные на ЖК-дисплей, они попадают в регистр данных и там обрабатываются. Когда RS = 1, выбирается регистр данных.
Важные коды команд для ЖК-дисплея
| Стар. | Шестнадцатеричный код | Команда на ЖК-дисплей, регистр команд |
| 1 | 01 | Четкий экран дисплея |
| 2 | 02 | Возвращение домой |
| 3 | 04 | Курсор уменьшения (сдвиг курсора влево) |
| 4 | 06 | Увеличить курсор (сдвинуть курсор вправо) |
| 5 | 05 | Сдвинуть дисплей вправо |
| 6 | 07 | Сдвинуть дисплей влево |
| 7 | 08 | Дисплей выключен, курсор выключен |
| 8 | 0A | Дисплей выключен, курсор на |
| 9 | 0C | Дисплей включен, курсор выключен |
| 10 | 0E | Дисплей включен, курсор мигает |
| 11 | 0F | Дисплей включен, курсор мигает |
| 12 | 10 | Сдвинуть курсор влево |
| 13 | 14 | Сдвинуть курсор вправо |
| 14 | 18 | Сдвинуть весь дисплей влево |
| 15 | 1С | Сдвинуть весь дисплей вправо |
| 16 | 80 | Установить курсор в начало (1-я строка) |
| 17 | C0 | Установить курсор в начало (2-я строка) |
| 18 | 38 | 2 строки и матрица 5 × 7 |
Отображение настраиваемых символов на ЖК-дисплее 16X2
Создание пользовательских символов на ЖК-дисплее не очень сложно.Это требует знаний о пользовательской памяти с произвольным доступом (CG-RAM) ЖК-дисплея и контроллера ЖК-чипа. Большинство ЖК-дисплеев содержат контроллер Hitachi HD4478.
CG-RAM является основным компонентом при создании пользовательских персонажей. Он хранит пользовательские символы, однажды объявленные в коде. Размер CG-RAM составляет 64 байта, что дает возможность создавать восемь символов за раз. Каждый символ имеет размер восемь байт.
Адрес CG-RAM начинается с 0x40 (шестнадцатеричный) или 64 в десятичном. Мы можем создавать собственные символы по этим адресам.Как только мы сгенерируем наши символы по этим адресам, мы сможем распечатать их, просто отправив команды на ЖК-дисплей. Адреса символов и команды печати приведены ниже.
В таблице выше вы можете увидеть начальные адреса для каждого символа с их командами печати.
Первый символ генерируется по адресам от 0x40 до 0x47 и печатается на ЖК-дисплее путем простой отправки команды 0.
Второй символ генерируется по адресам от 0x48 до 0x55 и печатается при отправке команды 1.
Как создавать собственные символы в CG-RAM
В ЖК-дисплеях каждый символ находится в матрице 5 × 8. Где 5 — количество столбцов, а 8 — количество строк.
Вот простой пример того, как создать букву «b» в CG-RAM.
Массив для создания ‘b’ — char b [7] = {0x10,0x10,0x16,0x19,0x11,0x11,0x1E}; То есть
- Отправьте адрес, по которому вы хотите создать персонажа.
- Теперь создайте своего персонажа по этому адресу.Отправьте значения массива символов «b», определенные выше, одно за другим в регистр данных ЖК-дисплея.
- Для печати сгенерированного символа по адресу 0x40. Отправьте команду 0 в регистр команд ЖК-дисплея. Таблица ниже поясняет это более ясно
Сопряжение ЖК-дисплея 16X2 с Arduino
Модули ЖК-дисплеяиграют очень важную роль во многих встраиваемых системах на базе Arduino для улучшения пользовательского интерфейса системы. Взаимодействие с Arduino дает программисту больше свободы для легкой настройки кода.Для построения схемы достаточно любой платы Arduino, ЖК-дисплея 16X2, перемычек и макета. Интерфейс Arduino к ЖК-дисплею ниже.
Исходный код для
16X2LCD и Arduino .Отображение яркости светодиода на ЖК-дисплее 16 × 2
Комбинация ЖК-дисплея и Arduino дает несколько проектов, самым простым из которых является ЖК-дисплей для отображения яркости светодиода. Все, что нам нужно для этой схемы, — это ЖК-дисплей, Arduino, макетная плата, резистор, потенциометр, светодиод и несколько соединительных кабелей.Схема подключения представлена ниже.
Детальный проект доступен при отображении яркости светодиода на ЖК-дисплее
Эта статья была впервые опубликована 21 ноября 2016 г. и недавно обновлена 17 июля 2021 г.
L01 Вывод
% PDF-1.5 % 1 0 объект > / OCGs [10 0 R 11 0 R 12 0 R 147 0 R 148 0 R 149 0 R 284 0 R 285 0 R 286 0 R 420 0 R 421 0 R 422 0 R 556 0 R 557 0 R 558 0 R 692 0 R 693 0 R 694 0 R 828 0 R 829 0 R 830 0 R 964 0 R 965 0 R 966 0 R 1105 0 R 1106 0 R 1107 0 R] >> / Страницы 3 0 R / Тип / Каталог >> эндобдж 2 0 obj > поток application / pdf
Arduino Mega Распиновка, схема контактов, схема и спецификации в деталях
Arduino Mega — это плата разработки с открытым исходным кодом, разработанная компанией Arduino. Он основан на Microchip ATmega2560P от Atmel. Atmega3560P — это 8-битный микроконтроллер со встроенным загрузчиком, что позволяет очень удобно прошивать плату нашим кодом. Распиновка и характеристики Arduino Mega на базе Atmega 2560P подробно описаны в этом посте.
Как и все платы Arduino, мы можем программировать программное обеспечение, работающее на плате, используя язык, полученный из C и C ++. Самая простая среда разработки — это IDE Arduino.
Распиновка Arduino Mega: Arduino Mega Pinout
Он состоит из 54 цифровых входов / выходов, из которых 16 — аналоговые, 14 — ШИМ и 6 аппаратных последовательных портов (UART). Он имеет кварцевый генератор на 16 МГц, разъем питания, разъем ICSP, порт USB-B и кнопку RESET.
Регулятор напряжения — Регулятор напряжения помогает преобразовать входное напряжение в 5В. В основном стабилизатор напряжения используется для управления уровнем напряжения на плате Arduino . Даже если есть какие-либо изменения входного напряжения регулятора, выходное напряжение остается постоянным и стабильным.
ATmega2560P : Это 8-битный микроконтроллер на базе AVR RISC (компьютер с сокращенным набором команд), который выполняет мощные инструкции за один такт.Это позволяет эффективно находить баланс между энергопотреблением и скоростью обработки.
Кварцевый осциллятор — Кварцевый осциллятор имеет частоту 16 МГц, которая обеспечивает тактовый сигнал на микроконтроллер. Он обеспечивает основной тайминг и контроль для платы.
Кнопка RESET — Используется для перезагрузки платы, рекомендуется нажимать ее каждый раз, когда мы прошиваем какой-либо код на плату.
Блок питания Arduino Mega ПИН-код:
Есть три способа питания Arduino Mega Board:
Разъем Barrel — Разъем Barrel или разъем питания 7-12 В постоянного тока можно использовать для питания нашей платы Arduino.Домкрат для бочек обычно подключается к переходнику. Плата может питаться от адаптера, который находится в диапазоне от 5 до 20 вольт, но производитель рекомендует поддерживать его в диапазоне от 7 до 12 вольт.
Примечание: При напряжении выше 12 В плата может перегреваться, и напряжения ниже 7 В может быть недостаточно для питания платы.
Порт USB B- Интерфейс USB используется для подключения кабеля USB. Этот порт может использоваться для питания устройства от источника питания 5 В и позволяет нам подключать плату к компьютеру.Программа загружается на плату последовательно с компьютера через USB-кабель.
В в — Это модулированное напряжение питания постоянного тока, которое используется для регулирования ИС, используемых в соединении. Это также называется первичным напряжением для микросхем, присутствующих на плате Arduino. Значение напряжения Vcc может быть отрицательным или положительным для вывода GND.
Контакты I2C на схеме контактов Arduino Mega:
Это двухпроводной протокол последовательной связи.Это расшифровывается как Inter-Integrated Circuits. I2C использует две линии для отправки и приема данных: вывод последовательного тактового сигнала (SCL) и вывод последовательных данных (SDA) (SDA).
- SCL — обозначает Serial Clock . Он определяется как линия, передающая данные часов. Он используется для синхронизации передачи данных между двумя устройствами. Последовательные часы генерируются ведущим устройством.
- SDA — обозначает Serial Data . Он определяется как линия, используемая ведомым и главным устройством для отправки и получения данных.Вот почему он называется линией данных , , а SCL — линией синхронизации.
Контакты SPI на схеме контактов Arduino Mega:
Это означает Последовательный периферийный интерфейс . Контакты 50, 51, 52 и 53 используются как контакты SPI. Они используются микроконтроллерами для быстрой связи с одним или несколькими периферийными устройствами. Для всех периферийных устройств есть три общие линии:
- SCK- Это означает Serial Clock .Это тактовые импульсы, которые используются для синхронизации передачи данных.
- MISO- Это означает Master Input / Slave Output . Эта линия данных на выводе MISO используется для отправки данных мастеру.
- MOSI- Это означает Master Output / Slave Input . Эта линия используется для отправки данных на периферийные устройства.
И одна общая линия:
- SS- Это означает Slave Select .Эта строчка используется мастером. Он действует как разрешающая линия. Когда значение вывода Slave Select устройства LOW, оно может связываться с мастером. Когда его значение HIGH, он игнорирует мастер. Это позволяет нам иметь несколько периферийных устройств SPI, совместно использующих одни и те же линии MISO, MOSI и CLK
Распиновка Arduino UNO- UART:
UART обозначает универсальный асинхронный приемник и передатчик . Это позволяет Arduino обмениваться данными с последовательными устройствами.В Arduino Mega есть 4 UART:
- Контакт 0 — RXD0, контакт 1 — TXD0
- Контакт 19 — RXD1, контакт 18 — TXD1
- Контакт 17 — RXD2, контакт 16 — TXD2
- Контакт 15 — RXD3, контакт 14 — TXD3
Этот вывод используется для последовательной связи UART с ПК или другими последовательными устройствами с целью обмена данными и регистрации. Он используется с функцией serial.Begin () для установки скорости передачи данных и запуска связи с функцией serial.Println () для печати массива символов на выходе другого устройства.
Внешние прерывания — Внешние прерывания могут быть сформированы с использованием 6-контактных выводов, таких как прерывание 0 (0), прерывание 1 (3), прерывание 2 (21), прерывание 3 (20), прерывание 4 (19), прерывание 5 (18). Эти выводы могут использоваться для запуска прерывания при низком значении, нарастающем или спадающем фронте или изменении значения.
ICSP: Заголовок ICSP Arduino Mega
Это означает внутрисхемное последовательное программирование . Мы можем использовать эти контакты для программирования прошивки платы Arduino.Изменения прошивки с новыми функциями отправляются в микроконтроллер с помощью заголовка ICSP.
Заголовок ICSP состоит из 6 контактов.
Распиновка Arduino Mega — аналоговый вход:
Arduino Mega состоит из 16 аналоговых контактов , которые используют АЦП (аналого-цифровой преобразователь). Эти контакты могут служить аналоговыми входами, но также могут функционировать как цифровые входы или цифровые выходы. Эти контакты принимают входные сигналы в виде аналоговых сигналов и возвращают значения в диапазоне от 0 до 1023 (это потому, что Arduino Mega имеет 10-битный аналого-цифровой преобразователь или разрешение 2 10 ).
Аналого-цифровой преобразователь работает в три этапа: дискретизация, квантование и оцифровка. Поскольку Arduino работает в диапазоне 0–5 вольт, размер шага устройства составляет 5/1023 = 0,00488 вольт или 4,88 мВ .
Таким образом, мы можем интерпретировать входное значение 4,88 мВ как 1, 9,77 мВ как 2 и так далее до 5 В = 1023. Все, что ниже 4,88 мВ, считается 0, а выше 4,99 В — как 1023.
цифровые и аналоговые выводы Arduino MegaРаспиновка Arduino Mega — цифровые выводы:
На плате контакты с 0 по 53 являются контактами цифрового ввода / вывода.
Цифровые выводы Arduino могут считывать только два состояния: когда есть сигнал напряжения и когда нет сигнала. Этот тип входа обычно называется цифровым (или двоичным), и эти состояния обозначаются как ВЫСОКИЙ и НИЗКИЙ или 1 и 0.
LED (13): На плате есть встроенный светодиод, подключенный к цифровому выводу 13. Когда этот вывод HIGH или 1, светодиод включен, когда вывод LOW или 0, он выключен. .
Выводы ШИМ Arduino Mega: Выводы Pwm Arduino Mega
Из набора цифровых выводов 15 выводов, которые являются выводами PWM (широтно-импульсной модуляции).Начиная с цифрового вывода 2 и заканчивая цифровым выводом 13 и , выводы 44, 45 и 46 являются выводами ШИМ. Каждый из этих цифровых выводов может генерировать сигнал широтно-импульсной модуляции с разрешением 2 3 бит. Мы можем сгенерировать сигнал ШИМ, используя функцию analogWrite ().
Другие штифты:
GND (Контакты заземления) : На плате имеется 7 контактов заземления.
RESET — сбрасывает плату Arduino.
Опорное напряжение ввода / вывода (IOREF) — Этот вывод является опорным напряжением ввода / вывода. Он обеспечивает опорное напряжение, при котором микроконтроллер работает в настоящий момент. Отправка сигнала на этот вывод ничего не делает.
AREF: AREF означает A nalogue Ref erence. Это опорное напряжение, относительно которого измеряются все остальные аналоговые напряжения ( аналоговых входов).
3,3 В и 5 В: Эти контакты обеспечивают регулируемые 5 В и 3.3 В соответственно на внешние компоненты, подключенные к плате.
Мега-схема Arduino (официальная):
Чтобы загрузить Arduino Mega Schematic , щелкните здесь.
Страница 1 (Мега схема Arduino) Страница 2 (Мега схема Arduino)** Источник: официальный магазин Arduino Mega
Технические характеристики:
| Микроконтроллер | ATmega2560 |
| Рабочее напряжение | 5 В |
| Блок питания | 7 В — 12 В |
| Потребление тока | 50 мА — 200 мА |
| Потребление тока Deep Sleep | 500 мкА |
| Цифровые выводы ввода / вывода | 54 |
| Цифровые выводы ввода / вывода с ШИМ | 15 |
| Контакты аналогового входа | 16 |
| Постоянный ток на контакт ввода / вывода | 40 мА |
| Постоянный ток для 3.Контакт 3V | 50 мА |
| Флэш-память | 256 КБ |
| SRAM | 8 КБ |
| EEPROM | 4096 байт |
| Тактовая частота | 16 МГц |
| Длина | 102 мм |
| Ширина | 53 мм |
| Разъем питания | да |
| USB-соединение | да |
Читайте похожие статьи:
| Распиновка и спецификации Arduino UNO в деталях
| Распиновка и спецификации Arduino Nano в деталях
| Распиновка и подробные характеристики Arduino Pro Mini
Пакет Python, который генерирует схемы распиновки оборудования в виде изображений SVG
Пакет Python, который генерирует схемы распиновки оборудования в виде изображений SVG.Пакет разработан так, чтобы быть довольно гибким и хорошо подходит для «прикрепления» ярлыков к изображению.
Как использовать
Некоторый демонстрационный код и примечания — быстрый способ начать работу. Просмотр исходного кода рекомендуется при отсутствии более подробных объяснений. В этом руководстве рассказывается, как создать диаграмму, добавить изображение и несколько меток. Затем, наконец, экспортируем получившуюся графику SVG.
Установка
Рекомендуется использовать виртуальную среду; Начните с установки пакета схемы PinOut .Либо клонируйте это репо и установите его, либо его можно установить прямо из github …
pip install git + https: //github.com/j0ono0/ [электронная почта защищена]
Для работы с этим руководством вам потребуются изображение и таблица стилей. Некоторые образцы файлов включены в пакет и могут быть продублированы для вашего использования. Запустите Python в том месте, где вы собираетесь работать, и введите следующее:
из ресурсов импорта распиновки resources.duplicate () # ожидаемый результат: # >>> sample_diagram.ру продублирован. # >>> sample_hardware_board.png продублирован. # >>> sample_styles.css дублирован.
Спойлер : sample_diagram.py — это завершенный сценарий, который дублирует код из этого руководства. Запустив его, вы создадите образец схемы распиновки SVG.
Схема запуска распиновки
Начните с импорта модуля схемы распиновки
из схемы импорта распиновки
Создайте новую диаграмму и добавьте таблицу стилей.
pinout_diagram = схема.Диаграмма () pinout_diagram.stylesheet = 'sample_styles.css'
СОВЕТ: координаты компонента
При экспорте рассчитываются окончательные размеры диаграммы, и все компоненты перемещаются в представление (через окно просмотра SVG). Следовательно, компоненты «x» и «y» позиционируются относительно друг друга, а не относительно родительской диаграммы. Рекомендуется расположить изображение, чтобы упростить вычисления для последующего размещения булавок.
Добавить изображение на схему
Изображение связано в окончательной диаграмме (не внедряется и не копируется в место назначения экспорта).Если используется относительный путь, он должен быть относительно того, куда экспортируется диаграмма.
pinout_diagram.add_image (0, 0, 220, 300, 'sample_hardware_board.png')
Создайте штифт
Это медленный способ, включенный, чтобы дать представление о шагах, происходящих за сценой.
leftpin = схема.Pin (16, 80, 'left')
Добавьте несколько меток к штифту. Примечание: ширину, высоту и зазор между меткой до следующей метки можно контролировать для каждой метки и отменять настройки по умолчанию.
leftpin.add_label ('# 1', 'gpio', 60, 20, 60)
leftpin.add_label ('A1', 'аналог')
leftpin.add_label ('ШИМ', 'ШИМ')
Добавьте этот вывод на схему
pinout_diagram.components.append (левый контакт)
Создание булавки и меток одним действием
Быстрый и рекомендуемый способ.
label_data = [('# 2', 'gpio', 60, 20, 60), ('GPI', 'gpi')]
pinout_diagram.add_pin (16, 120, 'влево', label_data)
С помощью небольшого «python-foo» этот процесс можно значительно упростить
custom_specs = (60, 20, 60)
pin_label_data = [
[('Vss', 'pwr-mgt', 40, 20, 190)],
[('GND', 'pwr-mgt', 40, 20, 190)],
[('# 6', 'gpi', * custom_specs), ('A3', 'аналог'), ('CLK', 'gpi')],
[('# 5', 'gpio', * custom_specs), ('A2', 'аналог')],
]
Аппаратные заголовки имеют равномерно расположенные контакты, что позволяет использовать их в виде петли.Эти переменные были определены путем измерения местоположения булавок на изображении.
y_offset = 80
x_offset = 204
шаг = 40
для i, label_data в перечислении (pin_label_data):
y = y_offset + высота * i
pinout_diagram.add_pin (x_offset, y, 'right', label_data)
Экспорт диаграммы
Окончательную диаграмму можно экспортировать как графику в формате SVG. Этот векторный формат отлично подходит для высококачественной печати, но все же является эффективным размером для использования в Интернете. Примечание: аргумент «перезаписать» является защитой от непреднамеренной потери существующих файлов.Установите значение True , чтобы упростить работу с одним изображением SVG.
pinout_diagram.export ('sample_diagram.svg', overwrite = False)
# ожидаемый результат:
#> 'sample_diagram.svg' успешно экспортирован.
Схема выводов микропроцессора 8085
Схема выводов микропроцессора 8085 приведена ниже:
Внимание, читатель! Не прекращайте учиться сейчас. Ознакомьтесь со всеми важными концепциями теории CS для собеседований SDE с курсом CS Theory Course по приемлемой для студентов цене и будьте готовы к работе в отрасли.
1. Адресная шина и шина данных:
Адресная шина представляет собой группу из шестнадцати линий, то есть A0-A15. Адресная шина является однонаправленной, то есть биты текут в одном направлении от микропроцессорного блока к периферийным устройствам и используют адресную шину высокого порядка.
2. Сигналы управления и состояния:
- ALE — Это сигнал разрешения фиксации адреса. Он переходит в высокий уровень во время первого состояния T машинного цикла и включает младшие 8 бит адреса, если его значение равно 1, в противном случае активируется шина данных.
- IO / M ’- Это сигнал состояния, который определяет, предназначен ли адрес для ввода-вывода или для памяти. Когда он высокий (1), адрес на адресной шине предназначен для устройств ввода-вывода. Когда он низкий (0), адрес на адресной шине предназначен для памяти.
- SO, S1 — Это сигналы состояния. Они различают различные типы операций, такие как остановка, чтение, выборка инструкций или запись.
| IO / M ‘ | S1 | S0 | Состояние шины данных |
|---|---|---|---|
| 0 | 1 | 1 | Выборка кода операции 15 |
| 020 | 900 0 | Чтение памяти | |
| 0 | 0 | 1 | Запись в память |
| 1 | 1 | 0 | Чтение ввода-вывода |
| 1 | 0 | 1 | Запись ввода / вывода |
| 1 | 1 | 1 | Подтверждение прерывания |
| 0 | 0 | 0 | Остановка |
- RD ‘- Это сигнал для управления операцией READ.Когда он низкий, считывается выбранная память или устройство ввода-вывода.
- WR ’- Это сигнал для управления операцией ЗАПИСЬ. Когда он становится низким, данные на шине данных записываются в выбранную память или место ввода / вывода.
- ГОТОВ — Он определяет, готово ли периферийное устройство к передаче данных или нет. Если READY высокий (1), периферийное устройство готово. Если он низкий (0), микропроцессор ждет, пока он не перейдет в высокий уровень. Это полезно для сопряжения низкоскоростных устройств.
3. Источник питания и тактовая частота:
- Vcc — + источник питания 5 В
- Vss — Заземление
- XI, кристалл XI подключены к этим двум контактам. Частота внутренне делится на два, поэтому для работы системы на частоте 3 МГц кристалл должен иметь частоту 6 МГц.
- CLK (OUT) — Этот сигнал может использоваться как системные часы для других устройств.
4. Прерывания и сигналы, инициируемые периферийными устройствами:
8085 имеет пять сигналов прерывания, которые можно использовать для прерывания выполнения программы.
(i) INTR
(ii) RST 7.5
(iii) RST 6.5
(iv) RST 5.5
(v) TRAP
Микропроцессор подтверждает запрос прерывания сигналом INTA ’. В дополнение к прерываниям есть три инициируемых извне сигнала, а именно RESET, HOLD и READY. Чтобы ответить на запрос HOLD, у него есть один сигнал, называемый HLDA.
- INTR — Это сигнал запроса прерывания.
- INTA ’- Это подтверждение прерывания, отправляемое микропроцессором после получения INTR.
5. Сигналы сброса:
- RESET IN ‘- Когда сигнал на этом выводе низкий (0), счетчик программ сбрасывается на ноль, шины тристированы, а микропроцессор устройство сброшено.
- RESET OUT — Этот сигнал указывает, что MPU сбрасывается. Сигнал можно использовать для сброса других устройств.
6. Сигналы DMA:
- HOLD — Указывает, что другое устройство запрашивает использование адреса и шины данных. Получив запрос HOLD, микропроцессор прекращает использование шин, как только текущий машинный цикл завершается. Внутренняя обработка может продолжаться.После снятия сигнала HOLD процессор восстанавливает шину.
- HLDA — Это сигнал, который указывает, что запрос удержания был получен после удаления запроса HOLD, HLDA переходит в низкий уровень.
7. Последовательные порты ввода / вывода:
Последовательная передача в 8085 осуществляется двумя сигналами,
- SID и SOD — SID — это линия данных для последовательного ввода, где SOD — это линия данных для последовательного вывода.
Распиновка Arduino UNO (схема) и компоненты платы
Я объясню описание Arduino UNO Pins и платы в этом посте. Arduino Uno — это стандартная плата компании, хотя другие платы, например, g. микро, нано, мега, Леонардо, 101. Дуэ и иена. Arduino также производит IoT (Интернет вещей), Bluetooth, GSM / 3G, Wi-Fi и платы датчиков движения.Плата Arduino Uno
Микроконтроллер Atmega328P — это 8-битный микроконтроллер с 32-килобайтной внутренней флеш-памятью.Для программирования основного чипа в состав платы входит кристалл с частотой 16 МГц. Плате Arduino для работы требуется всего 5 В постоянного тока.
Цвет выводаArduino показывает функции выводов. Синий цвет представляет контакты питания, розовый — контакты аналогового входа, голубой — цифровые контакты, зеленый — связь и пурпурный — контакты ШИМ.
FIG-A
Детали контактов Arduino Uno
Плата Arduino UNO имеет аналоговые / цифровые (PWM) контакты.Эти контакты могут быть GPIO или использоваться для определенных сигналов.
Винтовой штифт
Он использует вывод Vin для подключения 7–12 В постоянного тока к плате в качестве внешнего источника питания. В качестве входного напряжения питания можно использовать аккумуляторную батарею 9 В.
FIG-B
Аналоговые входные контакты
Контакты A0 — A5 Используются как контакты аналогового входа (для модулей датчиков), используемые как аналоговый выход. Он содержит 06 АЦП (аналого-цифровой преобразователь) с разрешением 10 бит.Эти выводы Arduino имеют функциональность универсальных цифровых выводов ввода / вывода.
SDA / SCL
Мы используем его для связи I²C (между интегральными схемами) / TWI (двухпроводной интерфейс). Библиотека Wire доступна для связи с различными устройствами с платой Arduino.
Последовательный UART (связь SPI)
Контакт 0 используется как RX и 1 TX (на рис. A как D0 и D1), используемый для последовательной связи TTL. RX должен принимать данные, а TX — передавать данные.
Контакты связи SPI
10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK).Эти контакты поддерживают связь SPI.
Прерывание
Выводы 2 и 3 могут использоваться как INT0 и INT1, мы можем настроить их для работы в качестве внешних прерываний для функции, записанной в программе.
ШИМ
Контакты № 3, 5, 6, 9, 10 и 11 используются для функции ШИМ (широтно-импульсной модуляции). Функция аналоговой записи () очень эффективна для управления двигателями постоянного тока и различными светодиодами во многих электронных проектах.
Штифт AREF
Мы используем вывод аналогового опорного сигнала для аналогового опорного сигнала.AREF используется для установки внешнего аналогового входного напряжения. Мы не можем использовать менее 0 и более 5 вольт для вывода AREF.
Контакты Arduino Uno (GPIO)
Мы используем 14 цифровых контактов в качестве входа или выхода. Цифры от 0 до 13, используемые в качестве цифровых входов / выходов общего назначения, имеют внутренние подтягивающие резисторы, которые могут быть от высокого / низкого до максимального тока ВКЛ / ВЫКЛ на вывод 40 мА.
Как показано на рис. A, от контактов D0 до D13. Встроенный светодиод работает через контакт 14 (D13).
ШИМ (широтно-импульсная модуляция)
Мы используем цифровой выход как High или Low даже с функцией выходов PWM.Мы можем использовать эти контакты в качестве аналогового выхода / мы можем управлять двигателем на разных скоростях. Функция цифровой записи (), используемая для высоких / низких выводов.
Интерфейс связи USB
Для USB / последовательной связи мы используем в основном два чипа, Ch441A или Atmega16U.
Ch441A
Ch441a использовала микросхему интерфейса USB для связи UART. Это стандартный параллельный порт, параллельный порт памяти и синхронный последовательный порт (I2C, связь SPI). Мы используем микросхему Ch441A во многих дешевых программаторах.
Atmega16U
Мы используем микроконтроллер atmega16u для последовательного интерфейса USB. Для программирования микроконтроллера на плате имеется контактный разъем ICSP.
LM358
LM358 — двухканальная ИС операционного усилителя. В Arduino используется для схемы автоматического выбора напряжения, но на самом деле она работает как автомат …
Подробнее » .