Как устроены шаговые двигатели. Какие бывают типы шаговых двигателей. Как работает шаговый двигатель. Какие существуют схемы подключения шаговых двигателей. Как осуществляется управление шаговым двигателем.
Что такое шаговый двигатель и как он устроен
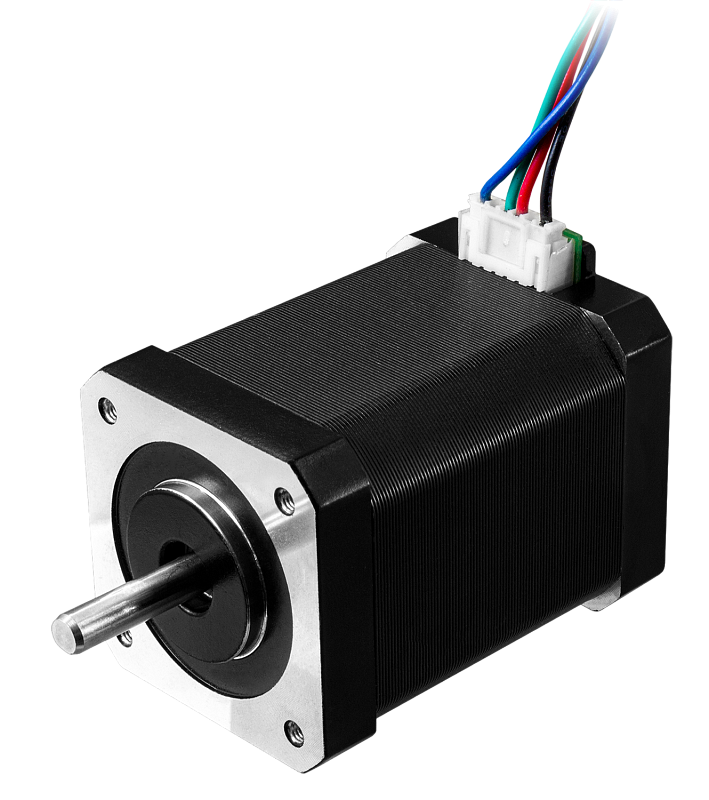
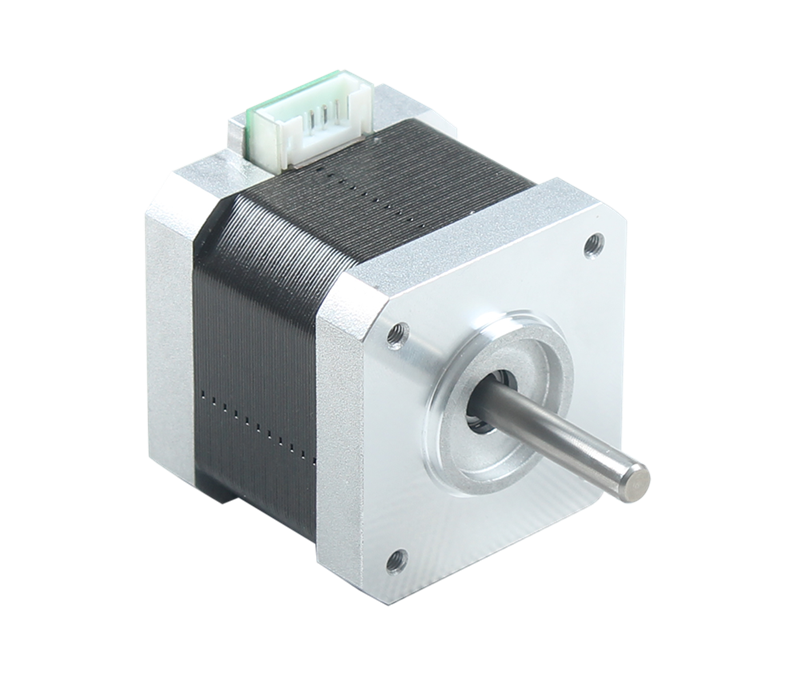
Шаговый двигатель — это электромеханическое устройство, преобразующее электрические импульсы в дискретные угловые перемещения (шаги) вала. Основные компоненты шагового двигателя:
- Статор — неподвижная часть с обмотками
- Ротор — вращающаяся часть с постоянными магнитами или зубцами
- Вал — передает вращение от ротора
- Корпус — защищает внутренние части
Статор шагового двигателя имеет несколько полюсов с обмотками. Ротор содержит постоянные магниты или зубцы из магнитомягкого материала. При подаче импульсов тока на обмотки статора создается вращающееся магнитное поле, заставляющее ротор поворачиваться на определенный угол.
Основные типы шаговых двигателей
Существует три основных типа шаговых двигателей:
1. Двигатели с переменным магнитным сопротивлением
Особенности:
- Ротор из магнитомягкого материала с зубцами
- Нет постоянных магнитов
- Простая конструкция
- Низкая стоимость
- Малый крутящий момент
2. Двигатели с постоянными магнитами
Особенности:
- Ротор с постоянными магнитами
- Больший крутящий момент
- Фиксированный шаг (обычно 7.5° или 15°)
- Низкая скорость и точность
3. Гибридные двигатели
Особенности:
- Комбинация особенностей первых двух типов
- Высокая точность (шаг 0.9° — 5°)
- Высокий крутящий момент
- Высокая скорость
- Наиболее распространены
Принцип работы шагового двигателя
Принцип работы шагового двигателя основан на взаимодействии магнитных полей статора и ротора:
- При подаче тока на обмотку статора создается магнитное поле
- Ротор стремится занять положение с минимальным магнитным сопротивлением
- Происходит поворот ротора на определенный угол (шаг)
- Последовательное переключение обмоток вызывает пошаговое вращение
Угол поворота ротора за один шаг определяется конструкцией двигателя и способом управления. Типичные значения — от 0.9° до 90° на шаг.

Схемы подключения шаговых двигателей
Существует два основных типа подключения шаговых двигателей:
Униполярное подключение
Особенности униполярного подключения:
- Используется для двигателей с отводом от середины обмоток
- Средние выводы обычно соединяются вместе
- Простая схема управления
- Меньший крутящий момент
Схема униполярного подключения обычно имеет 5 или 6 выводов.
Биполярное подключение
Особенности биполярного подключения:
- Используется весь объем обмоток
- Больший крутящий момент
- Сложнее схема управления
- Требуется Н-мост для смены полярности
Схема биполярного подключения обычно имеет 4 вывода.
Способы управления шаговым двигателем
Существует несколько основных способов управления шаговыми двигателями:
1. Полношаговый режим
В полношаговом режиме за один такт управления ротор поворачивается на один полный шаг. Существует два варианта:
- Одна фаза включена
- Две фазы включены
Полношаговый режим обеспечивает максимальный крутящий момент.
2. Полушаговый режим
В полушаговом режиме ротор поворачивается на половину шага за такт. Это достигается чередованием состояний:
- Одна фаза включена
- Две фазы включены
Полушаговый режим обеспечивает более плавное вращение, но с меньшим моментом.
3. Микрошаговый режим
В микрошаговом режиме ток в обмотках изменяется не скачком, а плавно по синусоидальному закону. Это позволяет:
- Увеличить точность позиционирования
- Снизить вибрации и шум
- Повысить плавность вращения
Микрошаговый режим требует более сложных драйверов управления.
Драйверы для управления шаговыми двигателями
Для управления шаговыми двигателями используются специальные драйверы. Основные функции драйвера шагового двигателя:
- Формирование необходимых токов в обмотках двигателя
- Переключение обмоток в нужной последовательности
- Обеспечение различных режимов работы (полный шаг, полушаг, микрошаг)
- Защита от перегрузок и коротких замыканий
Популярные серии драйверов для шаговых двигателей:
- A4988 — простой и недорогой драйвер для небольших двигателей
- DRV8825 — мощный драйвер с током до 2.5А на фазу
- TMC2209 — драйвер с тихим ходом и встроенной защитой
Применение шаговых двигателей
Благодаря возможности точного позиционирования шаговые двигатели широко применяются в различных областях:

- Станки с ЧПУ
- 3D-принтеры
- Робототехника
- Автоматизированные производственные линии
- Медицинское оборудование
- Фото- и видеотехника
- Автомобильная электроника
Шаговые двигатели особенно эффективны там, где требуется точное позиционирование и повторяемость движений.
Преимущества и недостатки шаговых двигателей
Шаговые двигатели имеют ряд преимуществ и недостатков по сравнению с другими типами электродвигателей.
Преимущества:
- Высокая точность позиционирования
- Отсутствие накопления ошибки положения
- Высокий крутящий момент на низких скоростях
- Возможность мгновенного старта/остановки/реверса
- Высокая надежность (отсутствие коллектора)
- Возможность управления без обратной связи
Недостатки:
- Сложность работы на высоких скоростях
- Возможность пропуска шагов при перегрузках
- Повышенное энергопотребление в режиме удержания позиции
- Склонность к резонансным явлениям
- Относительно высокая стоимость для больших мощностей
Несмотря на недостатки, уникальные возможности шаговых двигателей делают их незаменимыми во многих применениях.

Простая реализация схемы шагового двигателя на мк / Хабр
И так, данный пост нацелен на новичков в электронике а так же на новичков в программировании и освоении мк и разработке радиоэлектронных устройств.
Данная разработка представляет простейшее включение МК такого как PIC16F84A для управления шаговым двигателем. Для сборки такого устройства нам потребуется:
- Контроллер — PIC16F84A
- Шаговый двигатель
- Паяльник
- Рассыпуха
- Свободное время
- Немного мозга
Наша схема питается от стабилизированного источника питания +5 вольт. Однако силовая часть, может питаться от напряжения > напряжения МК < напряжения, что держат ваши транзисторы.
В качестве силовых странзисторов мы возьмем КТ815. В данном случае они идиально подходят для нашей задачи.
И так, собираем наш девайс по схеме(з. ы. если не видите схемы — значит сервер лежит. и скоро все наладится):
ы. если не видите схемы — значит сервер лежит. и скоро все наладится):
Предположим, все это у нас уже собрано, теперь осталось запрограммировать наш контроллер простенькой программой для того чтоб наш ротор крутился.
list p=16F84A
#include <p16F84A.inc>
; _CONFIG _CP_OFF & _WDT_OFF & _PWRTE_ON & _XT_OSC
;***базовые значения
del EQU 0xFF ;константа длительности задержки
count EQU 0x0C ;переменная подпрограммы задержки
ORG 0x00
;***начальная инициализация
clrf PORTA ;очистить порт А
clrf PORTB ;и порт В
bsf STATUS,RP0 ;включили банк 1
movlw INIT_A
movwf PORTA ;настроили порт А
movlw INIT_B
movwf PORTB ;настроили порт В
bcf OPTION_REG,7 ;включили встроенную нагрузку
bcf STATUS,RP0 ;включили банк 0
clrw
movwf PORTB
main
movlw b'01010000
movwf PORTB
call delay
;-------Вставляем сюда задержек, столько - сколько надо, или модифицируем подпрограмму на более длинную задержку
call delay
movlw b'01100000
movwf PORTB
call delay
;-------Вставляем сюда задержек, столько - сколько надо, или модифицируем подпрограмму на более длинную задержку
call delay
movlw b'10100000
movwf PORTB
call delay
;-------Вставляем сюда задержек, столько - сколько надо, или модифицируем подпрограмму на более длинную задержку
movlw b'10010000
movwf PORTB
call delay
;-------Вставляем сюда задержек, столько - сколько надо, или модифицируем подпрограмму на более длинную задержку
goto main
;***подпрограмма формирования задержки между шагами
delay movlw del
movwf count
loop decfsz count,f
goto loop
return
END
Вы вероятно заметили, что на схеме присутствуют кнопки, это на всякий пожарный — для расширения функциональности.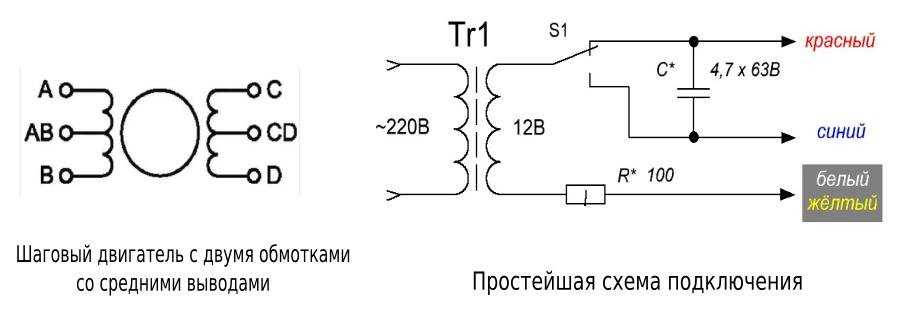 программу можно дописать для них, а так же не забудте включить внутренюю нагрузку на порт B
программу можно дописать для них, а так же не забудте включить внутренюю нагрузку на порт B
Компилируем в HEX файл этот код в программе MPLAB IDE. и шьем программатором или отладчиком(который по совместительству программатор).
UPD: Спрограмматор в данном случае использовался такой: клон оригинального ICD2 от фирмы Olimex. Стоит порядка 2.5к Включает в себя функции программатора и отладчика(афигительная вещь).
Отлично работает в связке MPLAB+ICD2 а так же PikLab+ICD2 под Linux
UPD2:
После сборки всего этого, и включения питания, ваш ротор двигателя должен начать вращаться в какую либо сторону.
Важнейшей частью программы, являются значения регистра W который затем передает значение на порт ввода/вывода. Там где еденичка, там будет +5 вольт на выходе.
Самый левый бит — самый старший, самый правый — самый младший. Так заведено и это закон. 🙂
Эти значения регистра, определяют каким образом будут подано напряжение на карушки двигателя.
movlw b'01010000 ;1й шаг
movlw b'01100000 ;2й шаг
movlw b'10100000 ;3й шаг
Если Вы напутаете с подключением двигателя, то он у вас может «дергаться туда-сюда» и поэтому надо смотреть именно в эту сторону прошивки, или менять контакты подключения.
— Если у вас вообще не работает — значит нужно проверить напряжение сброса контроллера. оно должно равляться +5 вольтам.
— Если там есть напряжение сброса, то нужно проверить питание процессора.
— Еще одной частой неполадкой может являться то что контроллер просто не отконфигурировали! не забывайте — это важно.
— Если у вас по прежнему схема не работает, то надо убедиться что кварцевый резонатор дает импульсы при включенном напряжении. Проверить можно с помощью осцилографа а так же мультиметра. Контакты OSC
Двигатель для этой схемы дыл взят из 5″ дисковода, от старых компьтеров. этот движок там передвигал головку для считывания информации с магнитного диска.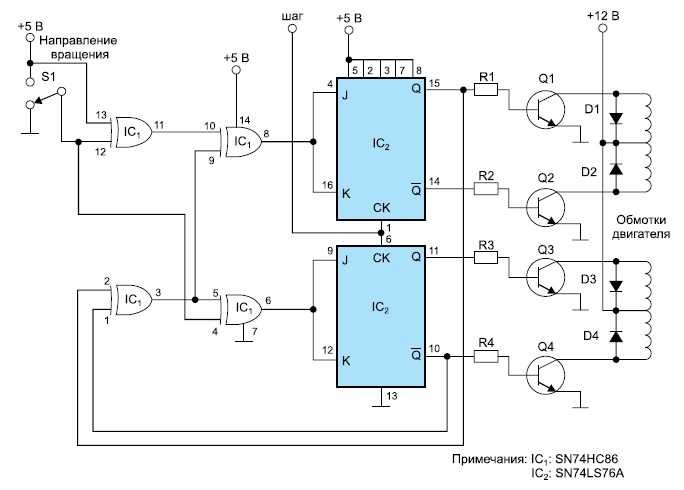 Имеет 5 контактов.
Имеет 5 контактов.
Вот собственно и все. 🙂
Принцип работы шагового двигателя, схема подключения униполярного электродвигателя, пошаговое управление
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость.
Содержание статьи
Отличие и разновидности шаговых двигателей
По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов. У них по сравнению с двигателем постоянного тока нет щёток, коллектора, а обмотки с меньшим количеством витков.
Среди первых двигателей был создан миниатюрный двигатель для ручных часов и назван в честь французского инженера Мариус Лавета. Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Моторчик лавета применяется также и в медицине для перекачки различной жидкости, а также часто используется в миксерах и блендерах.
В последнее время ведутся разработки пьезоэлектрических двигателей с использованием пьезомагнитного эффекта и применяя в конструкции ферромагнитные материалы. Совершенствуются линейные электродвигатели, у которых вал не вращается, а совершает линейные движения. Для оборудования точной механики российские производители выпускают двигатели с маркировкой серии:
- ДШ.

- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЭ
В производстве их участвуют такие предприятия, как НПО «АТОМ», ZETEK, компания Электропривод, Stepmotor, Вексон, НПО РИФ, Саратовский эл. механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
Конструкция и принцип работы
Шаговый двигатель состоит из статора и вращающегося ротора. Сердечник статора выполнен в виде набора листов электротехнической стали (штампованных). Это уменьшает вихревые токи и соответственно нагрев. Статор по окружности разбит на 4.6.8 продольных пазов. Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Ротор состоит из одного или двух постоянных магнитов, с торцов, металлические пластины которого закреплены с зубьями. При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
- реактивный;
- ротор из постоянного магнита;
- гибридный.
Реактивный — ротор выполнен из ферромагнитного материала с продольными пазами, полюсами. Он используется редко, только для выполнения простых задач. В основном из-за того, что у него нет стопорящего момента. Гибридный — ротор изготовлен из двух половинок ферромагнитного материала, с продольными пазами и между ними расположен постоянный магнит. Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
При подаче импульсного напряжения на обмотку статора образуется электромагнитное поле. Взаимодействуя, с ближайшим полюсом постоянного магнита создаётся крутящий момент. Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Такой двигатель и будет называться шаговым. Благодаря небольшим размерам ШД серии Em 422 применяется в матричных принтерах.
Методы управления фазами
Управление в основном зависит от количества полюсов и конфигурации обмоток статора. ШД выпускаются в основном со следующими обмотками:
- Две обмотки с 4 выводами.
- Две обмотки с 6 проводами со средним выводом.
- Четыре обмотки — 8 выводов.
Управлять можно двумя методами, использовать однополярное напряжение — униполярное или двухполярное — биполярное. Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки. У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки. При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки. У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки. При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины. Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
Двигатели с биполярным управлением имеют 4 обмотки, по 2 на каждую фазу. Управление происходит при смене полярности обмотки. При таком управлении усложняется схема подключения шагового двигателя, но крутящий момент при этом получается больше. Основные характеристики — напряжение питания, потребляемый ток фазы, шаг, мощность и размер фланца. Посадочные места стандартизированы и указываются как, например, Nema 23. Это соответствует расстоянию между отверстиями под крепление 57 мм.
Способы управления шаговым двигателем
Применение ШД в станках с ЧПУ конкурирует только с сервоприводами, например, в эрозионных станках или принтерах, они даже превосходят их по своим техническим возможностям, себестоимости и простым схемам управления. Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Большинство драйверов управляются компьютером через порты RS-232, USB и LPT. Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACh4, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.
Микрошаговый режим привода
Основное время работы ШД происходит в пошаговом или полушаговом режиме, а при пуске и остановке желательно использовать микрошаговый режим для точной фиксации. Пошаговый режим определён конструкцией и импульсным управлением. При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
Ротор фиксируется при определённом соотношении фаз токов в обмотках. Расчёт точки равновесия произвести по формуле x = S *pi/2*arctg a/b где:
- a — момент, создаваемый первой фазой и b — второй фазой;
- x — точка равновесия ротора или микрошаг в радианах;
- S — угол шага.
А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.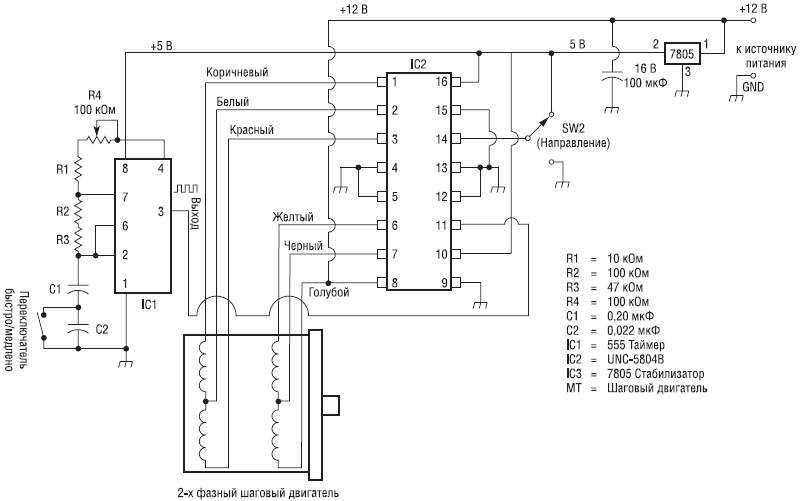
В процессе эксплуатации необходимо следить за чистотой вокруг привода и не допускать попадания металлической стружки, возможен выход из строя ШД. Найти способ защитить привод. Ремонт аналогичен ремонту коллекторного двигателя, требует аккуратности.
Шаговые двигателиПосле разборки взять и продуть сжатым воздухом статор и ветошью протереть ротор. Проверить отсутствие биения подшипников.
быстро и просто
- по: Крис Лотт
Если вы хотите получить простое и легкое представление о шаговых двигателях, посмотрите короткое видео [Парня из IMSAI], в котором он проектирует очень простой контроллер шагового двигателя и попутно даёт множество быстрых уроков. (Встроено ниже.)
Сначала он рассказывает об основах шагового двигателя в практическом практическом подходе, а также показывает нам, как прозванивать соединения, если распиновка неизвестна. Затем он демонстрирует управление двигателем вручную, а затем создает простую схему драйвера на полевых транзисторах. Как раз в тот момент, когда вы ожидаете появления небольшого микроконтроллера, [парень из IMSAI] вместо этого копается в своем мусорном ящике и объясняет, как управлять двигателем с помощью 22V10 GAL (электрически стираемый PAL) и модуля таймера 555. Основываясь на четко объясненной логической таблице для управления катушками, скрытом способе введения карт Карно, он приступает к написанию выходных уравнений в WinCUPL.
Затем он демонстрирует управление двигателем вручную, а затем создает простую схему драйвера на полевых транзисторах. Как раз в тот момент, когда вы ожидаете появления небольшого микроконтроллера, [парень из IMSAI] вместо этого копается в своем мусорном ящике и объясняет, как управлять двигателем с помощью 22V10 GAL (электрически стираемый PAL) и модуля таймера 555. Основываясь на четко объясненной логической таблице для управления катушками, скрытом способе введения карт Карно, он приступает к написанию выходных уравнений в WinCUPL.
WinCUPL — это современная версия CUPL (компилятор универсальной программируемой логики), первоначально написанная компанией Assisted Technology, которая сейчас принадлежит Altium. CUPL и его аналоги, такие как PALASM от Monolithic Memories, Inc. (MMI) и ABEL от Data I/O Corporation, были базовыми языками описания оборудования, специально разработанными для PAL, GAL и CPLD. PAL представляли собой небольшие массивы логических вентилей с плавкими соединениями, и ваша конструкция «вжигалась» в плавкие предохранители так же, как (EE)PROM.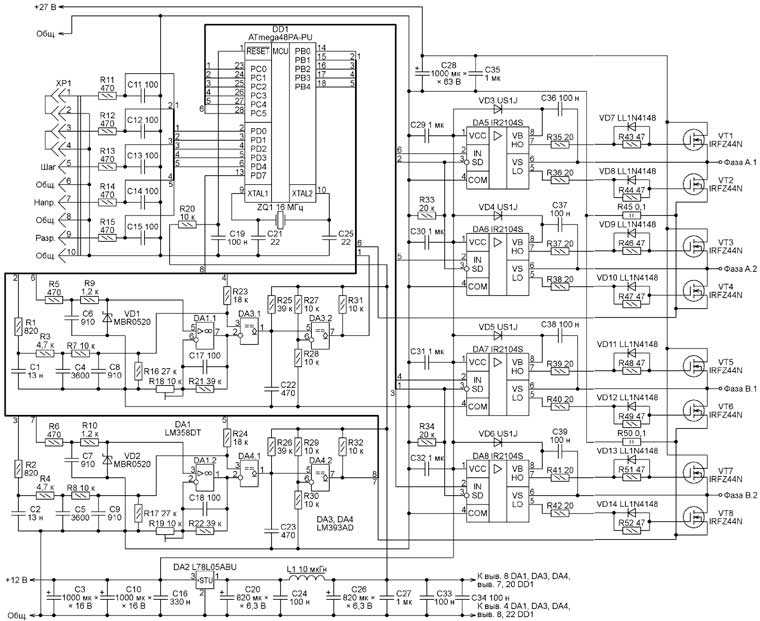 При проектировании с помощью PAL вы могли четко визуализировать связи в уме, что с тех пор было исправлено с появлением современных FPGA.
При проектировании с помощью PAL вы могли четко визуализировать связи в уме, что с тех пор было исправлено с появлением современных FPGA.
Увы, он вырезает часть, где компилируется исходный код и программируется 22V10, и сразу переходит к тестированию схемы на макетной плате. Спойлер — это работает. Приблизившись и прищурившись, он указывает на изящный макетный модуль таймера 555, который называется TP353, и его вы можете найти у своего любимого онлайн-поставщика.
В этом уроке можно многому научиться, и [Парень с IMSAI] отлично справляется с тем, чтобы сделать предмет доступным для любителей и новичков. Пару недель назад мы также рассмотрели еще одно его руководство по датчикам изображения. Спасибо [itsevilbert] за подсказку.
Цепи управления шаговым двигателем
A Цепи управления шаговым двигателем обычно питаются от источника постоянного тока низкого напряжения. Когда фаза должна быть под напряжением, источник постоянного тока подключается к фазе с помощью полупроводникового переключателя S (рис. 8.9).
Когда фаза должна быть под напряжением, источник постоянного тока подключается к фазе с помощью полупроводникового переключателя S (рис. 8.9).
Фазный ток нарастает со скоростью, определяемой электрической постоянной времени фазной обмотки. Когда фаза должна быть обесточена, переключатель выключается, который передает ток на обратный диод D F . Ток падает до нуля, опять же со скоростью, определяемой постоянной времени фазной обмотки. Момент двигателя, который является функцией i ph , образуется и распадается одинаково. Чтобы максимизировать крутящий момент шагового двигателя, схемы привода шагового двигателя должны быть такими, чтобы ток нарастал и уменьшался как можно быстрее, в идеале, как показано пунктирными линиями на рис. 8.9(b). Это особенно важно, когда требуются высокие скорости шага, как показано на рис. 8.9(c). Схемы привода шагового двигателя разработаны с учетом этого требования.
Униполярный привод для двигателей с переменным сопротивлением:
В случае двигателей с переменным реактивным сопротивлением необходимо только включить или выключить фазные токи, полярность тока не имеет значения.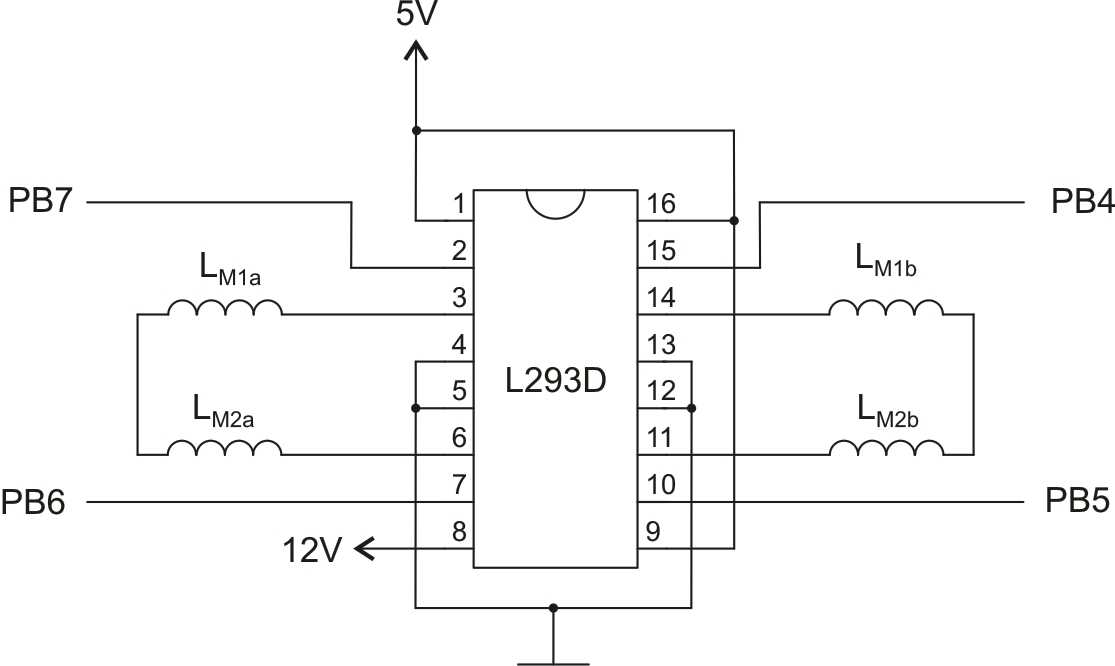 Достаточно униполярного привода, способного подавать ток только в одном направлении. Простая униполярная схема привода, подходящая для маломощного двухфазного двигателя с переменным сопротивлением, показана на рис. 8.10.
Достаточно униполярного привода, способного подавать ток только в одном направлении. Простая униполярная схема привода, подходящая для маломощного двухфазного двигателя с переменным сопротивлением, показана на рис. 8.10.
Когда переключатель S 1 замкнут, обмотка фазы А подключается к источнику постоянного тока V d и фазный ток нарастает, а при размыкании фазный ток спадает в цепи свободного хода, состоящей из фазы А, Д F и R F . Внешний резистор R E уменьшает электрическую постоянную времени, тем самым ускоряя нарастание тока. Величину внешнего резистора R E выбирают для фиксирования значения электрической постоянной времени, а затем выбирают напряжение источника V d для получения номинального тока I R в фазной обмотке. Таким образом
где R P сопротивление фазной обмотки.
Во время включения переключателя фазный ток также протекает через внешний резистор R E , в результате чего большая часть энергии, получаемой от источника, рассеивается в R E . Кроме того, энергия, накопленная в индуктивности фазной обмотки в течение периода включения переключателя, полностью рассеивается в сопротивлениях цепи свободного хода, когда переключатель выключен. Из-за этих потерь энергии униполярная схема на рис. 8.10 очень неэффективна и, следовательно, подходит только для маломощных цепей привода шагового двигателя.
Кроме того, энергия, накопленная в индуктивности фазной обмотки в течение периода включения переключателя, полностью рассеивается в сопротивлениях цепи свободного хода, когда переключатель выключен. Из-за этих потерь энергии униполярная схема на рис. 8.10 очень неэффективна и, следовательно, подходит только для маломощных цепей привода шагового двигателя.
На рис. 8.11 показана эффективная униполярная схема возбуждения, обеспечивающая быстрое нарастание и затухание тока. Он использует принцип чоппера. Показанная цепь предназначена только для одной фазы. Каждая другая фаза будет использовать аналогичную схему. Напряжение источника постоянного тока теперь может быть намного больше, чем в схемах привода шагового двигателя на рис. 8.10.
На рисунках 8.11(a), (b) и (c) показаны схема возбуждения, фазное напряжение и кривые тока соответственно. Для включения фазы полупроводниковые выключатели S 1 и S 2 замыкаются в момент t = t o . Это подключает фазную обмотку к источнику постоянного напряжения V d , и фазный ток i ph быстро нарастает. Когда он пересекает номинальный ток I R на заданную величину, S 1 выключается. Фазный ток свободно проходит через S 2 и D 2 и уменьшается ниже I R . Через фиксированный интервал включается S 1 . Ток фазы i ph увеличивается. При превышении им номинального тока I R на установленную величину снова отключается S 1 . Таким образом, при поочередном включении и выключении переключателя S 1 значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается отключением обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается к источнику V d .
Это подключает фазную обмотку к источнику постоянного напряжения V d , и фазный ток i ph быстро нарастает. Когда он пересекает номинальный ток I R на заданную величину, S 1 выключается. Фазный ток свободно проходит через S 2 и D 2 и уменьшается ниже I R . Через фиксированный интервал включается S 1 . Ток фазы i ph увеличивается. При превышении им номинального тока I R на установленную величину снова отключается S 1 . Таким образом, при поочередном включении и выключении переключателя S 1 значение фазного тока поддерживается равным примерно I R . При t = t 0 + T фаза обесточивается отключением обоих S 1 и S 2 . Теперь фазный ток протекает по пути, состоящему из D 1 , источника V d и D 2 , и большая часть энергии, запасенной в индуктивности фазной обмотки, возвращается к источнику V d .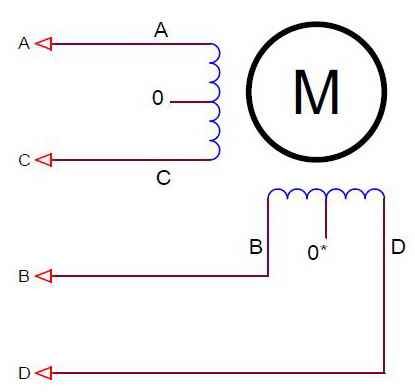 Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Поскольку фазный ток должен протекать против большого напряжения V d , он быстро спадает до нуля.
Биполярный привод для двигателей с постоянными магнитами и гибридных двигателей:
Простая биполярная схема привода для одной фазы показана на рис. 8.12. Каждая другая фаза будет использовать аналогичную схему. По фазной обмотке протекает положительный ток, когда полупроводниковые переключатели S 1 и S 2 проводят ток, и по нему течет отрицательный ток, когда S 3 и S 4 проводят.
На фазную обмотку подается положительный ток при включении S 1 и S 2 . Внешнее сопротивление R E снижает электрическую постоянную времени, позволяя быстро нарастать фазному току. V d и R E выбраны так, чтобы удовлетворять уравнению. (8.1). Фаза обесточивается выключением S 1 и S 2 . Ток обмотки теперь протекает по пути, состоящему из D 3 , источника V d и D 4 .