Как выполняется пуск синхронных двигателей. Какие существуют способы запуска мощных синхронных электроприводов. Какие особенности нужно учитывать при пуске синхронных электродвигателей. Какие преимущества и недостатки имеют синхронные двигатели по сравнению с асинхронными.
Особенности и преимущества синхронных электродвигателей
Синхронные электродвигатели широко применяются для привода мощного промышленного оборудования, такого как компрессоры, насосы, вентиляторы, прокатные станы. Они обладают рядом важных преимуществ по сравнению с асинхронными двигателями:
- Более высокий КПД при больших мощностях
- Стабильная скорость вращения независимо от нагрузки
- Возможность работы с высоким коэффициентом мощности
- Меньшая чувствительность к колебаниям напряжения сети
- Способность выдерживать значительные кратковременные перегрузки
При этом конструктивно синхронные двигатели сложнее асинхронных и требуют более сложных схем пуска и управления. Рассмотрим основные особенности и способы пуска этих мощных электроприводов.
Основные способы пуска синхронных двигателей
Существует несколько основных способов пуска синхронных электродвигателей:
- Асинхронный пуск
- Частотный пуск
- Пуск с помощью вспомогательного двигателя
- Пуск с помощью реактора
Выбор конкретного способа зависит от мощности двигателя, особенностей приводимого механизма, требований к пусковым токам и другим параметрам. Рассмотрим подробнее каждый из этих способов.
Асинхронный пуск синхронного двигателя
Асинхронный пуск является наиболее распространенным способом запуска синхронных двигателей. При таком пуске используется короткозамкнутая пусковая обмотка на роторе. Процесс пуска происходит следующим образом:
- На статор подается трехфазное напряжение
- Двигатель начинает разгоняться как асинхронный
- При достижении подсинхронной скорости (95-98% от синхронной) подается постоянный ток в обмотку возбуждения
- Происходит втягивание ротора в синхронизм
Преимущества асинхронного пуска:
- Простота реализации
- Возможность запуска под нагрузкой
- Плавный разгон двигателя
Недостатки:
- Большие пусковые токи
- Возможны проблемы с синхронизацией при тяжелых условиях пуска
Частотный пуск синхронного двигателя
При частотном пуске используется преобразователь частоты, который позволяет плавно повышать частоту и напряжение, подаваемые на двигатель. Это обеспечивает следующие преимущества:
- Ограничение пусковых токов
- Плавный разгон без рывков
- Возможность точного управления моментом при пуске
- Снижение нагрузки на механическую часть привода
Частотный пуск особенно эффективен для мощных высоковольтных двигателей. Недостатком является высокая стоимость преобразователя частоты необходимой мощности.
Пуск синхронного двигателя с помощью вспомогательного двигателя
В этом случае для разгона синхронного двигателя до подсинхронной скорости используется отдельный асинхронный двигатель меньшей мощности. Процесс пуска происходит так:
- Вспомогательный двигатель разгоняет синхронный до 95-98% синхронной скорости
- Подается возбуждение на обмотку ротора синхронного двигателя
- Происходит втягивание в синхронизм
- Вспомогательный двигатель отключается
Этот способ позволяет снизить пусковые токи, но требует дополнительного оборудования.
Пуск синхронного двигателя с помощью реактора
При этом способе последовательно со статорной обмоткой включается реактор, ограничивающий пусковой ток. По мере разгона реактор шунтируется. Это позволяет:
- Снизить пусковые токи
- Уменьшить провалы напряжения в сети при пуске
Недостатком является снижение пускового момента. Поэтому такой способ применяется в основном для пуска двигателей без нагрузки.
Особенности пуска синхронных двигателей большой мощности
При пуске мощных синхронных электродвигателей (более 5 МВт) необходимо учитывать ряд важных моментов:
- Большие пусковые токи, которые могут достигать 5-7 кратных значений от номинального тока
- Значительные провалы напряжения в питающей сети при прямом пуске
- Большие механические нагрузки на обмотки и подшипники двигателя
- Сложность обеспечения надежного втягивания в синхронизм
Для решения этих проблем применяются следующие меры:
- Использование устройств плавного пуска или преобразователей частоты
- Применение реакторного пуска
- Использование специальных пусковых автоматов возбуждения
- Выбор оптимального момента подачи возбуждения
Сравнение способов пуска синхронных двигателей
Рассмотрим сравнительные характеристики основных способов пуска синхронных электродвигателей:

| Способ пуска | Преимущества | Недостатки |
|---|---|---|
| Асинхронный | — Простота — Возможность пуска под нагрузкой | — Большие пусковые токи — Сложность синхронизации |
| Частотный | — Ограничение токов — Плавный разгон | — Высокая стоимость |
| С вспомогательным двигателем | — Снижение пусковых токов | — Дополнительное оборудование |
| Реакторный | — Снижение токов — Простота | — Уменьшение пускового момента |
Выбор оптимального способа пуска производится с учетом конкретных условий применения двигателя.
Заключение
Пуск синхронных электродвигателей имеет ряд особенностей, связанных с их конструкцией и принципом работы. Применение современных способов и устройств пуска позволяет обеспечить надежный запуск даже очень мощных синхронных машин. При этом удается ограничить пусковые токи, снизить нагрузки на оборудование и обеспечить стабильное втягивание двигателя в синхронизм.
Правильный выбор способа и схемы пуска синхронного электродвигателя позволяет в полной мере использовать преимущества этих машин — высокий КПД, стабильную скорость, возможность работы с высоким коэффициентом мощности. Это особенно важно для мощных промышленных электроприводов, где применение синхронных двигателей дает значительный экономический эффект.

Схема подключения синхронного двигателя переменного тока
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Устройство синхронного двигателя
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Схемы управления синхронными двигателями можно условно разделить на релейно-контакторные, применяемые для пуска, синхронизации с сетью и останова нерегулируемых по скорости электроприводов, и схемы с силовыми преобразователями, предназначенные для регулирования переменных ЭП с синхронными двигателями.
Релейно-контакторные схемы управления двигателей кроме операций по включению и отключению двигателя, ограничению пусковых токов и его синхронизации с сетью должны обеспечивать и соответствующее регулирование тока возбуждения. Электротехническая промышленность выпускает широкую номенклатуру типовых панелей и шкафов управления для синхронных двигателей различных мощностей и уровней номинального напряжения.
Типовая схема управления возбуждением двигателя в функции скорости. Подключение обмотки возбуждения к источнику питания UB осуществляется контактором КМ2 (рис. 6.10, а), который управляется реле скорости KR. Катушка этого реле связана с частью разрядного резистора Rp через диод VD.
При включении контактора КМ1 (его цепи управления на рисунке не показаны) обмотка статора двигателя подключается к сети переменного тока и образует вращающееся магнитное поле, под действием которого он начнет разбег и которое наведет ЭДС в обмотке возбуждения двигателя. Под действием ЭДС по катушке реле KR начнет протекать выпрямленный ток, оно включится и разомкнет цепь питания контактора КМ2. Разбег двигателя будет происходить без тока возбуждения с закороченной на разрядный резистор Rp обмоткой возбуждения.
По мере роста скорости ротора его ЭДС и ток в катушке реле KR, снижаются. При подсинхронной скорости ток в катушке реле KR станет меньше тока отпускания, реле отключится и вызовет тем самым включение контактора КМ2. Контактор КМ2 подключит обмотку возбуждения к источнику питания. Далее происходит процесс синхронизации СД с сетью.
Схема управления возбуждением двигателя в функции тока (рис. 6.10, б) содержит реле тока КА, обмотка которого питается от трансформатора тока ТА, и реле времени КТ. При подключении двигателя к сети контактором КМ1 в цепи обмотки статора возникает бросок пускового тока, что приводит к срабатыванию реле КА. Контакт этого реле замыкает цепь питания реле времени КТ, что вызывает отключение контактора возбуждения КМ2. Разбег двигателя, как и в предыдущем случае, осуществляется с закороченной на разрядный резистор Rp обмоткой возбуждения.
Рис. 6.10. Схемы управления пуском двигателя с использованием принципа
скорости (а) и тока (б)
В конце пуска при подсинхронной скорости двигателя и уменьшении тока в статоре реле КА отключается и катушка реле времени КТ теряет питание. Через заданную выдержку времени включается контактор КМ2, и через его контакты обмотка возбуждения подключается к источнику питания U , после чего двигатель втягивается в синхронизм.
Отметим, что в рассмотренных схемах после срабатывания контактора возбуждения КМ2 разрывается цепь разрядного резистора Rp, что облегчает тепловой режим его работы и повышает экономичность схемы.
Электротехническая промышленность выпускает типовые панели и шкафы управления синхронными двигателями разных типов. Рассмотрим в качестве примера схему одной из таких панелей.
Схема типовой панели ПУ 7502управления низковольтным синхронным двигателем приведена на рис. 6.11. Панель управления обеспечивает прямой (без токоограничения) пуск с глухоподключенным возбудителем G и форсировку возбуждения при снижении уровня питающего напряжения. В схеме предусмотрены также защиты: тепловая (реле КК и трансформаторы тока ТА1 и ТА2), токовая (автоматы QF1 и QF2), от снижения напряжения сети переменного тока (реле KV2, KV3) и постоянного тока (реле KV1).
Пуск двигателя может быть осуществлен только при нормальных уровнях питающих схему напряжений постоянного и переменного тока. В этом случае, если рукоятка командоконтроллера SA находится в среднем положении и включены автоматы QF1 и QF2, срабатывают реле напряжения KV2, KV3 и реле времени КТ, что подготавливает схему к пуску двигателя.
При переводе рукоятки SA в положение «Включено» срабатывает реле KV1 и катушка линейного контактора КМ1 подключается к ис-
Рис. 6.11. Схема синхронного электропривода с использованием типовой панели управления
точнику питания, к обмотке статора двигателя подводится напряжение переменного тока, и он начинает разбег. При подсинхронной скорости происходит возбуждение возбудителя G и соответственно двигателя, который втягивается в синхронизм.
При резком снижении питающего напряжения происходит включение контактора КМ2, который при этом шунтирует резистор форсировки /?ф. В результате возрастают токи возбуждения возбудителя и двигателя, увеличивается его ЭДС, что приводит к увеличению максимального момента и соответственно перегрузочной способности двигателя. О включении контактора форсировки КМ2 сигнализирует указательное реле КН.
Для контроля тока статора двигателя в схеме предусмотрен амперметр РА1, а тока возбуждения — амперметр РА2, питаемый от шунта RS.
Замкнутая схема ЭП с вентильным двигателем, предназначенная для регулирования его скорости (рис. 6.12), построена по принципу подчиненного регулирования координат и включает в себя управляемый выпрямитель УВ, коммутатор (инвертор) К, реактор L, регуляторы тока РТ и скорости PC, датчики тока ДТ, скорости ДС и положения ДП. Схема обеспечивает механические характеристики ЭП, аналогичные показанным на рис. 5.36, б.
По замкнутым структурам построены схемы автоматического регулирования возбуждения (АРВ) синхронных двигателей.
Рис. 6.12. Замкнутая схема вентильного двигателя
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Пуск синхронных двигателей: особенности и способы пуска
Для обеспечения работы мощных электроприводов применяются синхронные электродвигатели. Они нашли применение в компрессорных установках, насосах, в системах, прокатных станах, вентиляторах. Применяются в металлургической, цементной, нефтегазовой и других отраслях промышленности, где необходимо использовать оборудование большой мощности. В этой статье мы решили рассказать читателям сайта Сам Электрик, как может выполняться пуск синхронных двигателей.
Преимущества и недостатки
Конструктивно синхронные двигатели сложнее асинхронных, но они имеют ряд преимуществ:
- Работа синхронных электродвигателей в меньшей степени зависит от колебания напряжения питающей сети.
- По сравнению с асинхронными, они имеют больший КПД и лучшие механические характеристики при меньших габаритах.
- Скорость вращения не зависит от нагрузки. То есть колебания нагрузки в рабочем диапазоне не влияют на обороты.
- Могут работать со значительными перегрузками на валу. Если возникают кратковременные пиковые перегрузки, повышением тока в обмотке возбуждения компенсируют эти перегрузки.
- При оптимально подобранном режиме тока возбуждения, электродвигатели не потребляют и не отдают в сеть реактивную энергию, т.е. cosϕ равен единице. Двигатели, работая с перевозбуждением, способны вырабатывать реактивную энергию. Что позволяет их использовать не только в качестве двигателей, но и компенсаторов. Если необходима выработка реактивной энергии, на обмотку возбуждения подается повышенное напряжение.
При всех положительных качествах синхронных электродвигателей у них имеется существенный недостаток – сложность пуска в работу. Они не имеют пускового момента. Для запуска требуется специальное оборудование. Это долгое время ограничивало использование таких двигателей.
Способы пуска
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.
Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.
Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
Это могут быть:
- Добавочные резисторы или реакторы, которые ограничивают пусковые токи. После разгона они шунтируются, и на обмотки статора подается сетевое напряжение.
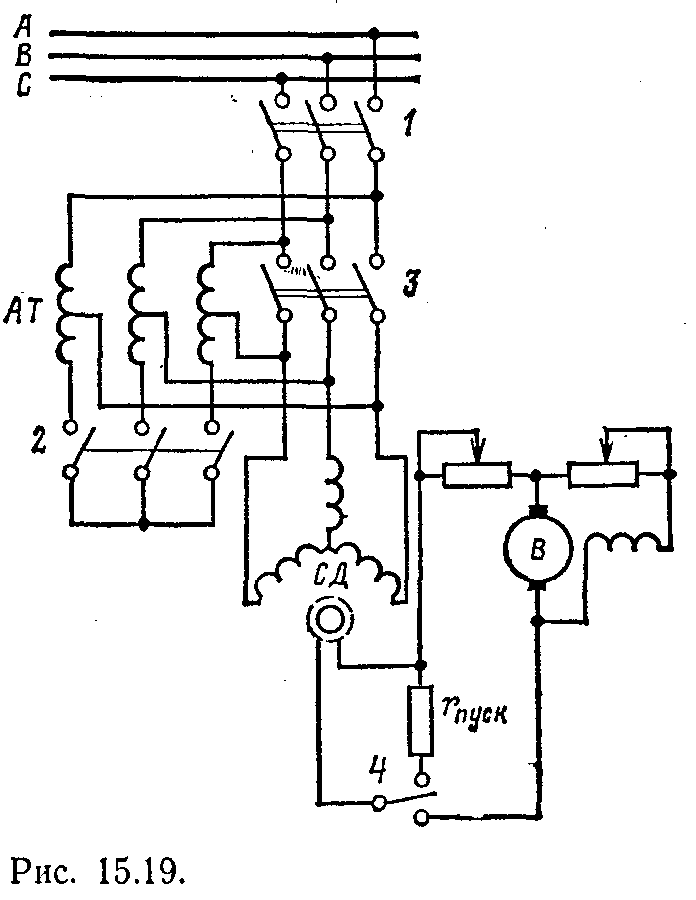
- Применение автотрансформаторов. С их помощью происходит понижение входного напряжения. При достижении скорости вращения 95-97% от рабочей, происходит переключение. Автотрансформаторы отключаются, а на обмотки подается напряжение сети переменного тока. В результате электродвигатель входит в режим синхронизации. Этот метод технически более сложный и дорогостоящий. А автотрансформаторы часто выходят из строя. Поэтому на практике этот метод редко применяют.
Частотный пуск
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.
Системы возбуждения
До недавнего времени, для возбуждения применялся генератор независимого возбуждения. Он располагался на одном валу с синхронным электродвигателем. Такая схема еще применяется на некоторых предприятиях, но она устарела и теперь не применяется. Сейчас для регулировки возбуждения используются тиристорные возбудители ВТЕ.
Они обеспечивают:
- оптимальный режим пуска синхронного двигателя;
- поддержание заданного тока возбуждения в заданных пределах;
- автоматическое регулирование напряжения возбуждения в зависимости от нагрузки;
- ограничение максимального и минимального тока возбуждения;
- мгновенное увеличение тока возбуждения при понижении питающего напряжения;
- гашение поля ротора при отключении от питающей сети;
- контроль состояния изоляции, с оповещением о неисправности;
- обеспечивают проверку состояния обмотки возбуждения при неработающем электродвигателе;
- работают с высоковольтным преобразователем частоты, обеспечивая асинхронный и синхронный запуск.
Эти устройства отличаются высокой надежностью. Основным недостатком является высокая цена.
В заключение отметим, что самый распространенный способ пуска синхронных двигателей — это асинхронный запуск. Практически не нашел применения пуск с помощью дополнительного электродвигателя. В то же время частотный запуск, который позволяет в автоматическом режиме решить проблемы пуска, довольно дорогостоящий.
Материалы по теме:
Схемы управления синхронными двигателями | Электрооборудование установок гидромеханизации
Страница 36 из 62
Процессы управления синхронным двигателем сводятся к автоматизированному пуску и регулированию тока возбуждения в рабочем режиме. Особенности пуска синхронного двигателя, рассмотренные в § 5-4, обусловливают определенные способы соединения возбудителя с обмоткой полюсов ротора (см. рис. 5-30).
Ниже рассматриваются схемы с глухоподключенным возбудителем и с сопротивлением в цепи возбуждения.
Полная схема управления синхронным двигателем с глухоподключенным возбудителем
Рассматриваемая схема (рис. 9-16) имеет в гидромеханизации повсеместное распространение. Она применяется для управления синхронными двигателями в приводе грунтовых насосов любых установок (плавучие и стационарные землесосные снаряды, перекачивающие станции), а также крупных водяных насосов.
В качестве возбудителя используется генератор постоянного тока, якорь которого механически связан с ротором двигателя СД1.
1 Часто применяются также возбудители с собственным двигателем привода небольшой мощности.
Пуск двигателя осуществляется в асинхронном режиме (см. § 5-4). На подсинхронной скорости двигатель втягивается в синхронизм и переходит к режиму работы на постоянной скорости (синхронный режим) .
Двигатель подключается к шинам 6000 В через разъединитель Р и масляный выключатель МВ. В данной схеме используется пружинный привод масляного выключателя, в частности типа ПП-67, с заводом пружин посредством коллекторного двигателя ДП (см. § 3-5, рис. 3-12).
Рис. 9-16. Схема управления, зашиты и сигнализации синхронного двигателя 6000 В с глухо подключенным возбудителем.
Пунктиром обведены катушки, установленные на приводе выключателя.
Схема привода МВ работает следующим образом.
Для приведения привода в состояние готовности к включению масляного выключателя переключателем УП замыкается цепь двигателя ДП, который при своем вращении через механическую передачу растягивает пружины привода («заводит» привод).
В крайнем положении растянутых пружин двигатель отключается размыкающими контактами конечного выключателя КВДП; в этом же положении замыкаются замыкающие контакты в цепи катушки ЭВ. При сжатых пружинах (после срабатывания привода) контакты КВДЛ соответственно изменяют свое положение.
Если переключатель УП остается в положении, когда его контакты замкнуты (левое положение рукоятки), то размыкающие контакты КВДП обеспечивают автоматический завод привода и состояние его готовности для следующего включения МВ.
Для включения масляного выключателя следует нажать кнопку Пуск. При этом замыкается цепь реле пуска двигателя РПД, которое одной парой замыкающих контактов шунтирует кнопку, а другой — замыкает цепь электромагнита включения привода ЭВ. В цепи катушки ЭВ предварительно должен быть замкнут пакетный выключатель ПВ. Включение катушки ЭВ носит импульсный характер; при срабатывании привода на включение размыкающие блок-контакты МВ (контакты КСА) размыкаются, прерывая цепь катушки ЭВ. Одновременно замыкаются замыкающие контакты МВ в цепях катушки отключения ЭО и реле положения привода РПП.
Отключение масляного выключателя производится при замыкании цепи катушки отключения ЭО нажатием на одну из кнопок Стоп. Отключение произойдет также при ошибочной попытке размыкания одного из разъединителей —ввода (на схеме не показан; см. рис. 12-12) или двигателя (разъединитель Р). При воздействии на приводы этих разъединителей для их отключения замыкаются контакты блокировочных: кнопок КБРВ или КБРД.
В схеме применена форсировка возбуждения, выполненная следующим образом.
При снижении напряжения пропорционально уменьшается момент на валу двигателя. Для поддержания момента при снижении напряжения следует увеличить ток возбуждения.
При полном напряжении на шинах 6000 В магнитный поток катушки реле минимального напряжения РФ, питающейся через трансформатор напряжения типа НТМИ (от вторичной обмотки, соединенной в звезду; см. § 3-6), достаточен для того, чтобы якорь реле находился в притянутом состоянии (как указано выше, замыкающие контакты РПП при включенном МВ замкнуты).
В этом состоянии размыкающие контакты реле РФ в цепи катушки контактора форсировки Ф разомкнуты, контактор Ф отключен и реостат возбуждения РВ введен в цепь обмотки возбуждения ОВВ возбудителя. При снижении напряжения на обмотках трансформатора НТМИ якорь реле РФ отпадает и его размыкающие контакты замыкают цепь контактора Ф. Контакты последнего, закрываясь, шунтируют реостат РВ, форсируя возбуждение. При восстановлении напряжения реостат вновь вводится в цепь возбуждения.
В рабочем режиме реостат служит для регулирования тока возбуждения и, следовательно, коэффициента мощности двигателя.
Схема также предусматривает следующие виды защит.
- Защита максимального тока, осуществляемая с помощью электромагнитных реле РТМ, встроенных в привод (см. § 13-3), катушки которых подключены к обмоткам трансформаторов тока 1TTа и 1ΤΤс (см. § 3-6). При достижении тока, проходящего через катушки, равного величине уставки, якорь реле втягивается и, воздействуя на расцепитель привода, отключает масляный выключатель МВ.
- Защита минимального напряжения, обеспечивающая отключение масляного выключателя при понижении напряжения ниже уставки реле РНВ, подключенного к обмотке трансформатора НТМИ. Реле встроено в привод выключателя и воздействует на расцепитель при отпадании якоря (см. § 13-3).
- Контроль изоляции, осуществляемый с помощью реле напряжения РКП, включенного в обмотку трансформатора НТМИ, соединенную в открытый треугольник (см. § 3-6). При нарушении изоляции в одной из фаз на стороне напряжения 6000 В на зажимах открытого треугольника возникает напряжение, достаточное для срабатывания реле. При этом размыкающие контакты реле РКИ прерывают цепь катушки реле РПЦ, предотвращая возможность включения масляного выключателя. Одновременно замыкающие контакты РКИ включают световое табло Л5 и звонок Зв звуковой сигнализации.
Действие цепей сигнализации и измерения (амперметры, вольтметры и фазометр) усматривается из схемы рис. 9-16 и в особом пояснении не нуждается.
Схемы управления возбуждением синхронного двигателя с сопротивлением в цепи возбудителя
Управление приводом выключателя, защита и сигнализация аналогичны рассмотренному для двигателя с глухоподключенным возбудителем. Ниже поясняется лишь управление возбуждением двигателя с помощью магнитной станции для цепей ротора, выпускаемой электротехнической промышленностью и поставляемой в комплекте с синхронными двигателями.
В схеме, представленной на рис. 9-17, обмотка возбуждения двигателя СД при пуске замкнута на сопротивление СГ, которое служит
Рис. 9-17. Схема управления возбуждением синхронного двигателя с сопротивлением в цепи возбуждения.
для увеличения сопротивления цепи возбуждения и снижения пускового пульсирующего момента (см. рис. 5-29). Кроме того, оно выполняет функцию разрядного сопротивления, предотвращая пробой изоляции обмотки возбуждения приостановке двигателя, когда возбудитель отключается контактами кв.
Схема работает следующим образом.
При включении выключателя МВ начинается процесс асинхронного пуска двигателя СД; возникающий толчок тока приводит к срабатыванию реле РПТ, замыкающего своими контактами цепь реле времени 1PB и через замыкающие контакты последнего — цепь реле 2РВ. При этом открываются размыкающие контакты 1РВ и 2РВ в цепи катушки
контактора КВ.
Одновременно при включении выключателя замыкается его блок- контакт МВ и получает питание катушка промежуточного реле РП. Закрываясь в цепи катушки контактора КВ, замыкающие контакты реле РП подготавливают его к включению. Цепь этой катушки остается, однако, разомкнутой до тех пор, пока открыты размыкающие контакты реле 1РВ и 2РВ.
Конструкция контактора КВ предусматривает самоотключение его катушки после срабатывания размыкающими контактами КВ, включенными последовательно с ней. При этом якорь контактора в притянутом положении удерживается механической защелкой. Последующее освобождение якоря и размыкание контактов производятся воздействием на защелку электромагнитом ЭМЗ.
По мере разгона двигателя пусковой ток снижается и при определенном его значении якорь реле РПТ отпадает и замыкающие контакты PUT разрывают цепь катушки реле 1PB; контакты 1РВ затем прерывают цепь катушки реле 2РВ. Отпадание реле 1PB и 2РВ влечет за собой замыкание с выдержкой времени размыкающих контактов 1РВ и 2РВ в цепи катушки контактора КВ. Контактор КВ включается, в результате чего в схеме происходят следующие изменения. Катушка КВ отключается размыкающими блок-контактами КВ в ее цепи, но якорь контактора удерживается в притянутом состоянии механической защелкой. Обмотка возбуждения двигателя СД замыкается на якорь возбудителя замыкающими главными контактами КВ и отключается от сопротивления СГ размыкающими контактами. В цепях управления закрываются контакты КВ, подготавливая операцию последующего отключения двигателя. Одновременно замыкающие блок-контакты КВ шунтируют катушку реле РПТ в цепи трансформатора тока.
При отключении двигателя выключателем МВ блок-контакты последнего, разрываясь, прекращают питание катушки реле РП. При отпадании якоря реле РП его размыкающие контакты, закрываясь, подают питание одновременно на катушку контактора КВ и электромагнита защелки ЭМЗ. Якорь контактора КВ притягивается для облегчения освобождения защелки, а электромагнит ЭМЗ, воздействуя на нее, расцепляет механизм удержания якоря КВ, и он отпадает, возвращая аппараты схемы в исходное состояние.
Как и в схеме с глухоподключенным возбудителем (рис. 9-16), в данной схеме предусмотрена форсировка возбуждения, контролируемая реле напряжения РФ, катушка которого включена на зажимы вторичной обмотки трансформатора напряжения. При понижении напряжения якорь реле РФ отпадает и его размыкающие контакты замыкаются в цепи контактора форсировки Ф. Срабатывание последнего обеспечивается, кроме того, через замыкающие контакты реле времени 2РВ, катушка которого включается, как показано выше, при замыкании реле РПТ. Таким образом, действие форсировки возбуждения дублируется по току нагрузки двигателя.
Для удержания контактора во включенном состоянии требуется меньший ток, нежели для его включения из разомкнутого состояния.
Поэтому питание катушки после включения осуществляется через добавочное сопротивление 2СД1, которое вводится размыкающими контактами Ф при включении контактора.
Рассмотренные схемы пуска предусматривают включение двигателя на полное напряжение сети.
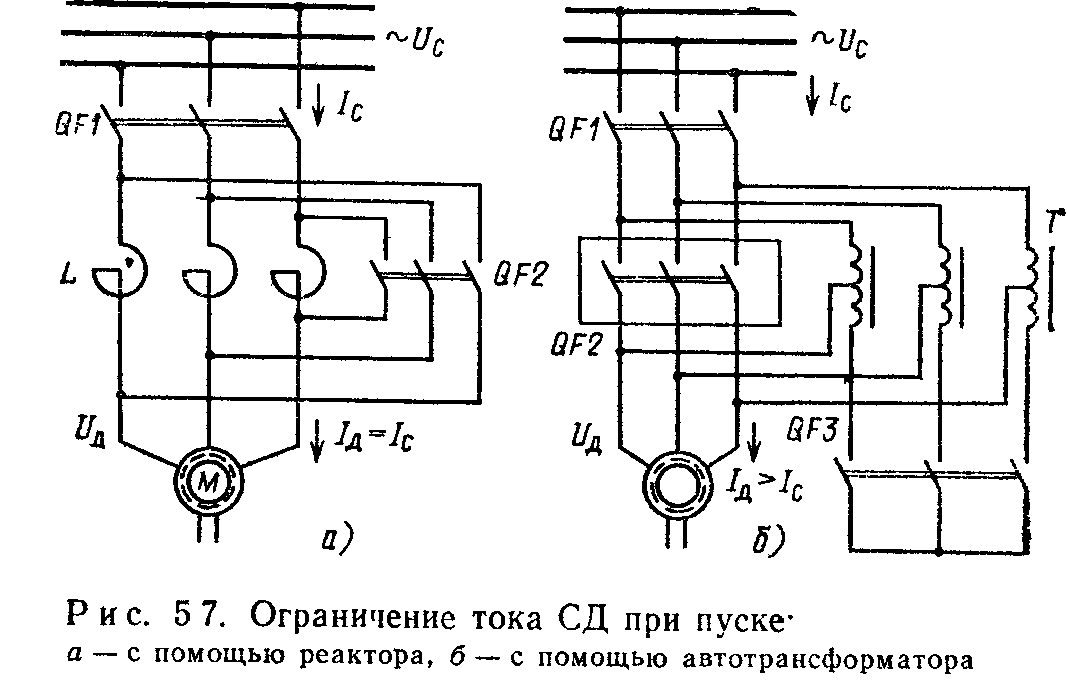
Асинхронный пуск синхронных двигателей большой мощности сопровождается значительным броском тока и соответствующим ему понижением напряжения питающей сети. В случае необходимости ограничения бросков тока пуск синхронных двигателей в известных случаях производится при пониженном напряжении. Для этого статор двигателя подключают к сети через реактор или автотрансформатор, шунтируемые затем, по завершении переходного процесса пуска, особыми выключателями.
В связи с этим различают схемы легкого и тяжелого пуска синхронных двигателей.
Первый случай относится к пуску ненагруженных двигателей или двигателей с небольшим моментом нагрузки на валу. При легком пуске втягивание двигателя в синхронизм и подача возбуждения происходят при пониженном напряжении.
При тяжелом пуске подаче возбуждения предшествует переключение статора на полное напряжение.
Схемы пуска при пониженном напряжении в установках гидромеханизации не применяются и поэтому более подробно здесь рассмотрены не будут.
1 Такое добавочное сопротивление, служащее для уменьшения тока катушек при продолжительном включении, называется экономическим.
§89. Синхронный двигатель, принцип действия и устройство синхронного двигателя
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
соответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
Включение — синхронный двигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Включение — синхронный двигатель
Cтраница 1
Включение синхронного двигателя в трехфазную сеть аналогично включению синхронного генератора. Синхронный двигатель при включении в сеть не может прийти во вращение, ротор его будет вибрировать. Действительно, при частоте переменного тока сети 50 Гц двухполюсное магнитное поле статора будет делать 50 оборотов в секунду. При этом каждый полюс ротора получит 50 толчков в секунду по часовой стрелке и 50 — в обратном направлении, так как. [1]
Включением синхронного двигателя регистрирующих приборов определяют работу лентопротяжного механизма и качество записи показаний. При необходимости перо приборов типа РЛ прочищают специальной стальной проволокой диаметром 0 15 мм, а капилляр пера приборов типа ПВ продувают, соединив трубкой пузырек-пульверизатор с бачком для чернил. Чернила подкачивают до их появления на конце капилляра. У приборов 2РЛ и ЗРЛ проверяют ход стрелок в пределах всей шкалы, наблюдая, чтобы не было зацепления между стрелками. [2]
Схема включения синхронного двигателя показана на рис. 11.8. Последовательность пуска двигателя будет рассмотрена в § 11.11, а пока предположим, что обмотка якоря подключена к трехфазному источнику переменного напряжения, обмотка возбуждения — к источнику постоянного напряжения, пуск двигателя уже произведен и его ротор имеет частоту вращения п, равную частоте вращения пс магнитного поля якоря. [3]
Схема включения синхронного двигателя приведена на рис. III. Этот двигатель имеет такой же по исполнению, как и у асинхронного двигателя, статор. Ротор выполняется с двумя обмотками: пусковой обмоткой ОП типа обмотки короткозамкнутого ротора асинхронного двигателя и обмоткой возбуждения 0В постоянного тока. Обмотка ОП служит для асинхронного пуска синхронного двигателя, обмотка 0В — для возбуждения двигателя в нормальном режиме работы. Таким образом, процессу пуска и рабочему режиму соответствуют свои механические характеристики. [4]
Схема включения синхронного двигателя показана на рис. 11.8. Последовательность пуска двигателя будет рассмотрена в § 11.11, а пока предположим, что обмотка якоря подключена к трехфазному источнику переменного напряжения, обмотка возбуждения — к источнику постоянного напряжения, пуск двигателя уже произведен и его ротор имеет частоту вращения п, равную частоте вращения п0 магнитного поля якоря. [5]
Схема включения синхронного двигателя представлена на рис. 3.10, а. [6]
Схема включения синхронного двигателя представлена i рис. 3.7, а. [7]
Схема включения синхронного двигателя в сеть приведена на фиг. [8]
Схема включения синхронного двигателя представлена на рис. 3.9, а. [9]
Простейшая схема включения синхронного двигателя показана на рис. 11.9. Последовательность пуска двигателя будет рассмотрена в § 11.10, а пока предположим, что обмотка якоря подключена к трехфазному источнику переменного тока, обмотка возбуждения — к источнику постоянного тока, пуск двигателя уже произведен и его ротор вращается со скоростью п, равной скорости п0 вращающегося магнитного поля якоря. [11]
Для ограничения пускового тока включение синхронного двигателя может производиться также через реактор или автотрансформатор, как отмечалось выше. [12]
Для ограничения пускового тока включение синхронного двигателя может производиться также через реактор или автотрансформатор. [14]
Вывод груза из полости датчика должен вызывать отключение сигнала на ДП, включение синхронного двигателя и начало вращения фрикционной муфты, о чем судят по перемещению риски полумуфты 9 относительно делений на шкале. [15]
Страницы: 1 2
Асинхронный пуск — синхронный двигатель
Асинхронный пуск — синхронный двигатель
Cтраница 1
Асинхронный пуск синхронного двигателя в ход ( см. § 59 — 4) осуществляется с помощью короткозамкнутой демпферной ( пусковой) обмотки, располагающейся в пазах полюсных наконечников. [2]
Асинхронный пуск синхронных двигателей в настоящее время является основным. [3]
Асинхронный пуск синхронных двигателей при полном напряжении на обмотке статора сопровождается значительным увеличением потребляемого из сети тока до величин порядка / п ( 3 — f — — т — 6) / ном, где нижний предел соответствует тихоходным, а верхний предел. [5]
Асинхронный пуск синхронного двигателя в ход ( см. § 59 — 4) осуществляется с помощью короткозамкнутой демпферной ( пусковой) обмотки, располагающейся в пазах полюсных наконечников. [7]
Асинхронный пуск синхронного двигателя в ход ( см. § 19 — 19) осуществляется с помощью короткозамкнутой ( пусковой) обмотки, располагающейся в пазах полюсных наконечников. [9]
Асинхронный пуск синхронного двигателя осуществляется при помощи специальной короткозамкнутой обмотки, уложенной в полюсных наконечниках ротора. Синхронный двигатель, снабженный такой обмоткой, запускается так же, как короткозамкнутый асинхронный двигатель. [11]
Асинхронный пуск синхронных двигателей большой мощности сопровождается значительным броском тока и соответствующим ему понижением напряжения питающей сети. В случае необходимости ограничения бросков тока пуск синхронных двигателей иногда производится при пониженном напряжении. Для этого статор двигателя подключают к сети через реактор или автотрансформатор, шунтируемые затем по завершении пуска особыми выключателями. В этой связи различают схемы легко г о и тяжелого пуска синхронных двигателей. [12]
Асинхронному пуску синхронных двигателей свойственны те же недостатки, что и пуску асинхронных короткозамкнутых двигателей, главным из которых является большой пусковой ток. Управление пуском синхронных двигателей в современных установках обычно автоматизируется. [13]
Начинается асинхронный пуск синхронного двигателя СД; напряжение возбудителя В по мере разгона двигателя увеличивается, и, следовательно, нарастает его ток возбуждения; при достижении подсинхронной частоты вращения ротор двигателя под действием входного момента втягивается в синхронизм. Ток возбуждения двигателя регулируется реостатом ШР, установленным на пульте. [14]
Начинаете асинхронный пуск синхронного двигателя МС; напряжение во; будителя ВМ по мере разгона двигателя нарастает и, следов телыго, нарастает его ток возбуждения; при достижении по; синхронной скорости ротор двигателя под действием входног момента втягивается в синхронизм. Ток возбуждения двигател регулируется реостатом ШР, установленным. [15]
Страницы: 1 2 3 4
Запуск синхронного привода
Если запуск асинхронного двигателя сопряжен с определенными проблемами, то синхронный двигатель, вообще не в состоянии развить необходимый механический момент даже для запуска на холостом ходу. Причина заключается в том, что электромагнитный момент для его неподвижного ротора непрерывно меняет свое направление. При этом ротор, обладая большой инерцией, не может прийти в движение и двигатель не способен «двигать» даже себя.
Для того, чтобы он смог развить номинальный крутящий момент, необходимо, чтобы ротор уже вращался со скоростью, близкой к скорости вращения электромагнитного поля статора. Тогда на обмотку возбуждения ротора подается постоянный ток и магнитное поле «втягивает» электродвигатель в «синхронизм».
Получается, что для того, чтобы запустить синхронный привод, необходимо, прежде всего, разогнать рабочий вал двигателя. Постоянное напряжение для обмотки возбуждения можно обеспечить, установив на общем валу генератор постоянного тока.
Для разгона ротора «синхронника» долгое время применялись исключительно отдельные электрические машины на общем механическом валу. Упрощенно: работает такая схема просто: включается асинхронный двигатель, по достижении момента, когда скорость станет близкой к синхронной, и подается напряжение на статор и обмотку возбуждения приводного двигателя.
Другой вариант – это использование синхронного двигателя со специальной, пусковой короткозамкнутой обмоткой. Такая обмотка имеет вид «беличьей клетки», но выполняется она не из меди, как у асинхронных машин, а из латуни, чтобы ограничить пусковой ток. «Беличья клетка» позволят электромотору запуститься асинхронно, а по достижении подсинхронной скорости перейти на нормальный режим работы.
Во время асинхронного пуска двигателя его обмотка возбуждения должна быть замкнута на резистор с активным сопротивлением, превышающим активное сопротивление самой обмотки в 8-12 раз.
Это необходимо потому, что электромагнитным полем статора в обмотке возбуждения при пуске наводится ЭДС большого значения, которая может пробить изоляцию витков, не будучи разряженной. Реже, обмотку возбуждения замыкают на якорь генератора-возбудителя, когда есть основания полагать, что он однозначно выдержит пусковую нагрузку.
Оба приведенных способа пуска отличаются технической сложностью и затратностью. Требуется установка дополнительных электрических машин – в случае с пусковым двигателем их целых три. Кроме того, требуется монтаж дополнительного электрооборудования, обеспечивающего своевременную подачу переменного трехфазного напряжения и постоянного напряжения возбуждения.
Схема с пусковой «беличьей клеткой» усложняет конструкцию электродвигателя. Тем не менее, именно она имеет сегодня самое широкое распространение.
И схема с гонным пусковым двигателем, и схема с пусковой обмоткой работают с гораздо большей эффективностью при частотном пуске, когда асинхронный пуск или пусковой двигатель управляются частотным преобразователем.
Но, обе схемы не могут обеспечить пуск синхронного двигателя с существенным моментом сопротивления на валу. При использовании пускового асинхронного двигателя наличие на валу нагрузки повлечет за собой необходимость в неоправданно большой мощности гонного двигателя.
А при использовании пусковой обмотки из латуни мягкая механическая характеристика не позволит ротору разогнаться до подсинхронной скорости. Поэтому для облегчения пуска синхронного двигателя лучше снять всякую нагрузку с приводного вала.
Это обстоятельство и ограничивает сферы применения синхронных двигателей. Они используются в мощных приводах, работающих продолжительное время при постоянной нагрузке, без частых пусков и остановов.
Это может быть привод шахтной вентиляционной установки, привод крупного насосного агрегата, привод электромашинного преобразовательного агрегата. Преимущества синхронных приводов здесь в том, что они могут работать с очень высоким коэффициентом мощности, а для мощных приводов это решающий фактор.
Синхронные двигатели| Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного отсчета времени, таких как хронометраж, (часы) и магнитофоны. Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность — в течение нескольких месяцев.
Это происходит из-за того, что операторы электростанции намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока.Если он отстает на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не теряют время.
Сравнение больших и малых синхронных двигателей
Выше 10 лошадиных сил (10 кВт), более высокий КПД и ведущий коэффициент мощности делают большие синхронные двигатели полезными в промышленности. Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Поскольку двигатели и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве двигателя и, наоборот, использовать двигатель в качестве генератора.
Асинхронный двигатель подобен генератору переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На рисунке ниже могут быть изображены либо два параллельно подключенных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в действие синхронный двигатель. Или это могут быть два двигателя, если подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать с одинаковой номинальной частотой и находиться в фазе друг с другом.То есть они должны быть синхронизированы . Процедура синхронизации двух генераторов переменного тока состоит в следующем: (1) размыкание переключателя, (2) приведение в действие обоих генераторов с одинаковой скоростью вращения, (3) ускорение или замедление фазы одного блока до тех пор, пока оба выхода переменного тока не будут в фазе, (4) замыкание переключатель до того, как они сойдут по фазе.
После синхронизации генераторы будут заблокированы друг с другом, что потребует значительного крутящего момента, чтобы отделить один блок (не синхронизированный) от другого.
Синхронный двигатель, работающий синхронно с генератором
Учет крутящего момента синхронных двигателей
Если больший крутящий момент в направлении вращения приложен к ротору одного из вышеупомянутых вращающихся генераторов переменного тока, угол ротора будет увеличиваться (противоположно (3)) по отношению к магнитному полю в катушках статора, пока все еще синхронизирован и ротор подает энергию в сеть переменного тока, как генератор переменного тока.
Ротор также будет выдвинут относительно ротора другого генератора. Если нагрузка, такая как тормоз, приложена к одному из вышеуказанных устройств, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
Если применяется чрезмерный крутящий момент или сопротивление, ротор превысит максимальный угол крутящего момента , продвигаясь или запаздывая настолько, что синхронизация будет потеряна. Крутящий момент развивается только при сохранении синхронизации двигателя.
Доведение синхронных двигателей до скорости
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации для генераторов переменного тока. Тем не менее, синхронный двигатель не запускается автоматически и должен быть доведен до приблизительной электрической скорости генератора переменного тока, прежде чем он синхронизируется с частотой вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронизм с источником переменного тока и развивать крутящий момент.
Синхронный привод с синхронным двигателем
Предполагая, что двигатель развивает синхронную скорость, когда синусоидальная волна меняется на положительную на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, в то время как верхняя южная катушка притягивает северный полюс ротора. Подобным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в точке (2), крутящий момент, удерживающий северный полюс ротора вверх, является максимальным.Этот крутящий момент уменьшается по мере уменьшения синусоидальной волны до 0 В постоянного тока в точке (3) с минимальным крутящим моментом.
Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая северный полюс ротора. Подобным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В точке (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоидальная волна изменяется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоидальной волны.
Обратите внимание, что на приведенном выше рисунке показано положение ротора в режиме холостого хода (α = 0 °). На практике нагрузка на ротор приведет к тому, что ротор будет отставать от положений, показанных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α = 90 °.
Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует с переменной полярностью.
Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием.Поскольку поле катушки пульсирует и не вращается, необходимо увеличить скорость ротора с постоянным магнитом с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, похожий на те, что описаны в следующем разделе.
Добавление полюсов поля снижает скорость
2-полюсный (пара полюсов N-S) генератор будет генерировать синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (оборотов в минуту). 3600 об / мин соответствует 60 оборотам в секунду.Подобный 2-полюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин.
Двигатель с меньшей скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об / мин, 12-полюсный двигатель — со скоростью 600 об / мин. Показанный стиль конструкции (рисунок выше) предназначен для иллюстрации. Многополюсные синхронные двигатели со статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.
Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью встречно-штыревыми элементами стальных полюсов, как показано на рисунке выше.Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя — на юге.
Полюса направляют южный поток снизу и снаружи катушки вверх. Эти 6-ю южные части чередуются с 6-ю северными ушками, загнутыми вверх от верхней части стального полюса катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-ти циклам переменного тока за одно физическое вращение стержневого магнита.
Скорость вращения будет 1/6 электрической скорости переменного тока.Скорость ротора будет 1/6 от скорости 2-полюсного синхронного двигателя. Пример: 60 Гц вращает 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на www.clockHistory.com
Статор (рисунок выше) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция аналогична предыдущему рисунку с одной катушкой. Конструкция с одной обмоткой экономична для двигателей с низким крутящим моментом.Этот двигатель со скоростью 600 об / мин приводит в движение редукторы, перемещая стрелки часов.
Q: Если бы двигатель Westclox работал со скоростью 600 об / мин от источника питания с частотой 50 Гц, сколько полюсов потребовалось бы?
A: 10-полюсный двигатель будет иметь 5 пар полюсов N-S. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об / мин (10 с-1 x 60 с / мин).
Перепечатано с разрешения Westclox History на www.clockHistory.com
Ротор (рисунок выше) состоит из стержня постоянного магнита и стальной чашки асинхронного двигателя.Шина синхронного двигателя, вращающаяся внутри полюсных лапок, сохраняет точное время. Чашка асинхронного двигателя за пределами стержневого магнита подходит снаружи и над язычками для самозапуска. Одно время выпускались несамозапускающиеся двигатели без чашки асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, показанный на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются автоматически, если они запускаются от источника питания с фиксированной частотой, например, 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор является не постоянным магнитом для двигателей мощностью несколько лошадиных сил (несколько киловатт), используемых в промышленности, а является электромагнитом. Большие промышленные синхронные двигатели более эффективны, чем асинхронные. Они используются, когда требуется постоянная скорость. Обладая опережающим коэффициентом мощности, они могут корректировать линию переменного тока на отстающий коэффициент мощности.
Три фазы возбуждения статора складываются векторно, чтобы создать единое результирующее магнитное поле, которое вращается f / 2n раз в секунду, где f — частота линии электропередачи, 50 или 60 Гц для промышленных двигателей, работающих от линии электропередачи.Количество полюсов — n. Для частоты вращения ротора в об / мин умножьте на 60.
S = f120 / n где: S = частота вращения ротора в об / мин f = частота сети переменного тока n = количество полюсов на фазу
Трехфазный 4-полюсный (на фазу) синхронный двигатель будет вращаться со скоростью 1800 об / мин при мощности 60 Гц или 1500 об / мин при мощности 50 Гц. Если катушки запитываются по очереди в последовательности φ-1, φ-2, φ-3, ротор должен указывать на соответствующие полюса по очереди.
Поскольку синусоидальные волны фактически перекрываются, результирующее поле будет вращаться не ступенчато, а плавно.Например, когда синусоидальные волны φ-1 и φ-2 совпадают, поле будет на пике, указывающем между этими полюсами. Показанный ротор стержневого магнита подходит только для небольших двигателей.
Ротор с несколькими полюсами магнита (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с контактным кольцом в крупных промышленных двигателях. Крупные промышленные синхронные двигатели запускаются самостоятельно с помощью встроенных в якорь проводов с короткозамкнутым ротором, действующих как асинхронный двигатель.
Электромагнитный якорь возбуждается только после того, как ротор достигает почти синхронной скорости.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели
Малые многофазные синхронные двигатели можно запускать путем линейного увеличения частоты привода от нуля до конечной рабочей частоты. Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами. Можно использовать двух- или трехфазный привод, запитав соответствующее количество обмоток статора. Выше показано только 3 фазы.
Электронный синхронный двигатель
На блок-схеме показана электроника привода, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока). Эти двигатели имеют датчик положения , встроенный в двигатель, который выдает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как твердотельные датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию (направление тока якоря) для электроники привода. Датчик положения может быть датчиком угла с высоким разрешением, таким как резольвер, индуктосин (магнитный энкодер) или оптический энкодер.
Если требуется постоянная и точная скорость вращения (как для дискового накопителя), могут быть включены тахометр и контур фазовой автоподстройки (рисунок ниже).Этот сигнал тахометра, последовательность импульсов, пропорциональная скорости двигателя, возвращается в контур фазовой автоподстройки частоты, который сравнивает частоту и фазу тахометра со стабильным источником опорной частоты, например кварцевым генератором.
Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, управляемый прямоугольными волнами тока, который обеспечивается простыми датчиками Холла, известен как бесщеточный двигатель постоянного тока .Этот тип двигателя имеет более высокое отклонение пульсирующего момента при обороте вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсации крутящего момента двигателя и механический аналог
Пульсация крутящего момента или зубчатость вызывается магнитным притяжением полюсов ротора к полюсным наконечникам статора. (Рисунок выше) Обратите внимание, что катушки статора отсутствуют.Ротор ПМ можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними.
Это аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы двигатель поочередно ускорялся и замедлялся, когда он перемещает аудиозапись мимо кассетной воспроизводящей головки. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные в ленте, создают более синусоидальное поле
Если двигатель приводится в действие синусоидальными волнами тока, синхронными с обратной ЭДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли формы волны привода электронными средствами.Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , , если магнитное поле статора имеет синусоидальное распределение.
Он будет более синусоидальным, если обмотки полюсов распределены в виде ремня через множество пазов, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Такая конструкция подавляет многие нечетные гармоники поля статора.
Слоты с меньшим количеством обмоток на краю обмотки фазы могут делить пространство с другими фазами.Намоточные ремни могут принимать альтернативную концентрическую форму, как показано на рисунке ниже.
Ремни концентрические
Для двухфазного двигателя, приводимого в действие синусоидальной волной, крутящий момент остается постоянным на протяжении всего оборота по тригонометрической идентичности:
sin2θ + cos2θ = 1
Для генерации и синхронизации формы сигнала привода требуется более точная индикация положения ротора, чем обеспечивается датчиками Холла, используемыми в бесщеточных двигателях постоянного тока.Резольвер или оптический или магнитный кодировщик обеспечивает разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер выдает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.
Привод синусоидальной волны на самом деле может быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровым сигналом.Каждая фаза требует, чтобы управляющая электроника для этой формы сигнала была сдвинута по фазе на соответствующую величину.
ШИМ аппроксимирует синусоидальную волну
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются высокоэнергетические постоянные магниты. Появление современной твердотельной электроники позволяет управлять этими двигателями с регулируемой скоростью.
Асинхронные двигатели в основном используются в железнодорожной тяге. Однако небольшой синхронный двигатель, который устанавливается внутри ведущего колеса, делает его привлекательным для таких применений. Версия для высокотемпературных сверхпроводников этого двигателя составляет от одной пятой до одной трети веса двигателя с медной обмоткой.
Самый крупный экспериментальный сверхпроводящий синхронный двигатель, способный управлять кораблем класса военно-морской эсминец. Во всех этих применениях важен электронный привод с регулируемой скоростью.Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Для развития максимального крутящего момента ротор должен отставать от направления поля статора на 90 °. Больше он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, необходимо точно знать положение ротора. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное управление фазой .Он реализован с помощью быстродействующего микропроцессора, управляющего широтно-импульсным модулятором фаз статора. Статор синхронного двигателя такой же, как и у более популярного асинхронного двигателя.
В результате электронное регулирование скорости промышленного уровня, используемое в асинхронных двигателях, также применимо к большим промышленным синхронным двигателям. Если ротор и статор обычного вращающегося синхронного двигателя раскручены, получается синхронный линейный двигатель.
Этот тип двигателя применяется для точного высокоскоростного линейного позиционирования.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Синхронный двигатель: эквивалентная схема и фазовая диаграмма
Эквивалентная схема для одной фазы синхронного двигателя показана на рисунке 1. Она аналогична эквивалентной схеме синхронного генератора , но с двумя отличиями.
Во-первых, он был перевернут, чтобы показать систему питания как вход для двигателя, а, второй, , ток в двигателе считается положительным.
Система питания обычно представляет собой бесконечную шину, потому что двигатель намного меньше остальной части системы питания. Когда поле ротора вращается с синхронной скоростью, в обмотки якоря наводится противодействующая ЭДС (C-EMF), E a , . Написание уравнения для контура напряжения дает
$ \ begin {matrix} {{V} _ {t}} = {{E} _ {a}} + jI {{X} _ {s}} & {} & \ left (1 \ right) \\\ end {matrix} $
Что может быть преобразовано в
$ \ begin {matrix} {{E} _ {a}} = {{V} _ {t}} — jI { {X} _ {s}} & {} & \ left (2 \ right) \\\ end {matrix} $
РИСУНОК 1: Пофазная эквивалентная схема для синхронного двигателя.
Фазорная диаграмма синхронного двигателяУравнение 2 является предпочтительной формой, поскольку напряжение на клеммах обычно выбирается в качестве опорного вектора для целей построения векторной диаграммы. Зная напряжение на клеммах, мы можем построить векторную диаграмму для синхронного двигателя, как показано на рисунке 2. Рисунок 2 (a) показывает векторную диаграмму для запаздывающего тока.
РИСУНОК 2: Диаграммы синхронного двигателя.
- Ток задержки.
- Ведущий ток.
Поскольку двигатель является нагрузкой, запаздывающий ток означает, что двигатель принимает запаздывающий ток и, таким образом, действует как индуктивная нагрузка. Падение напряжения на синхронном реактивном сопротивлении составляет -jIX s . Оператор -j представляет собой поворот на 90 ° по часовой стрелке, поэтому падение напряжения синхронного реактивного сопротивления перпендикулярно току в показанном направлении.
Обнаружено, что результирующая С-ЭДС отстает от напряжения на клеммах на дельту угла мощности (δ).Из векторной диаграммы на рисунке 2 (a) мы можем заметить, что
$ \ begin {matrix} {{E} _ {a}} \ cos \ delta <{{V} _ {t}} & {} & \ left (3 \ right) \\\ end {matrix} $
Это означает, что двигатель работает в условиях недостаточного возбуждения, потребляя реактивную мощность от бесконечной шины.
На рис. 2 (б) показана векторная диаграмма двигателя, работающего с опережающим током. Поскольку двигатель принимает опережающий ток, он действует как емкостная нагрузка. В этом случае генерируемое напряжение по-прежнему отстает от напряжения на клеммах на угол мощности, но величина генерируемого напряжения теперь больше, чем напряжение на клеммах, или, более конкретно,
$ \ begin {matrix} {{E} _ {a}} \ cos \ delta> {{V} _ {t}} & {} & \ left (4 \ right) \\\ end {matrix} $
В этом случае двигатель перевозбужден и обеспечивает реактивную мощность бесконечного автобуса.
Синхронные двигатели обычно рассчитаны на выдачу определенной мощности при работе с определенным значением коэффициента мощности.
Наиболее распространенными номинальными значениями коэффициента мощности для синхронных двигателей являются единицы и 0,8 . Двигатель, рассчитанный на коэффициент мощности 0,8, очевидно, будет больше и дороже, чем двигатель, рассчитанный на единичный коэффициент мощности, потому что и проводники якоря, и проводники возбуждения должны будут пропускать больший ток при более низком коэффициенте мощности.
При работе с коэффициентом мощности меньше единицы синхронный двигатель почти наверняка будет работать в опережающем направлении.
Схема модели синхронного двигателя
V = Напряжение на клеммах
R e = Эффективное сопротивление
X L = Реактивное сопротивление утечки
X a = Фактическое реактивное сопротивление
X s = Синхронное реактивное сопротивление
E = Синхронное реактивное сопротивление
E emf
В случае синхронного двигателя структура вращающегося поля должна быть запитана постоянным током (DC ток). В обмотке статора следует учитывать два эффекта: воздействие поля, перерезающего проводники статора с синхронной скоростью, и влияние вращающегося поля статора.Напряжение, индуцированное в обмотке статора вращающимся магнитным полем.
Это напряжение называется противо-эдс (E), противоположная приложенному напряжению (V) к статору. Величина наведенной ЭДС зависит от силы тока возбуждения. В секции статора подсчитываются два реактивных сопротивления: одно — это реактивное сопротивление рассеяния, а другое — фиктивное реактивное сопротивление.
Эффект реакции якоря можно заменить фиктивным реактивным сопротивлением (X a ), которое в сочетании с реактивным сопротивлением утечки якоря дает синхронное реактивное сопротивление (X с ) в сочетании с эффективным сопротивлением якоря (R e ) дает синхронное сопротивление (Z s ).
Метод нулевого коэффициента мощности или треугольник Потье
Прежде чем обсуждать треугольник Потье, мы должны обсудить характеристику Потье. Характеристика нулевого коэффициента мощности (ZPFC) генератора переменного тока представляет собой кривую зависимости напряжения на клеммах якоря по фазе от тока возбуждения при постоянном номинальном токе якоря при синхронной скорости и коэффициенте мощности с нулевым запаздыванием (p.f.).
Для поддержания очень низкого коэффициента мощности. (нулевой) генератор нагружен синхронным двигателем с недостаточным возбуждением.Форма характеристического графика с нулевым коэффициентом мощности очень похожа на O.C.C. смещен вниз по горизонтали.
Фазорная диаграмма выглядит следующим образом —
Здесь
Y = напряжение на клеммах
I a = ток якоря
R a = сопротивление якоря
X L = реактивное сопротивление утечки
E g = генерируемое напряжение на фазу
F a = Реакция якоря mmf
F f = Поле mmf
F r = Результирующая ЭДС
Если мы пренебрегаем сопротивлением якоря, Phasor будет следующим:
Принятие опорного напряжения на клеммах на нуле p .f. запаздывая, ток якоря отстает от напряжения на 90 90 451 o 90 452. Здесь I a R a параллельно I a , I a X L перпендикулярно I a .
Тогда мы можем сказать, что из первой векторной диаграммы
Из второй векторной диаграммы мы можем сказать, что напряжение на клеммах (В), падение реактивного напряжения (I a X L ) и генерируемое напряжение (E g ) совпадают по фазе.
Арифметически мы говорим, что:
Также три вектора mmf находятся в фазе, так что мы можем сказать, что:
Если мы преобразуем это уравнение в эквивалентный ток поля, разделив его обе стороны на T f , который является эффективным количество витков на полюс на роторном поле.
Где,
I f = ток возбуждения
I r = результирующий ток
I a = ток якоря
Рассмотрим ‘b’ при нулевой p.f. вырезать при номинальном напряжении на клеммах (v) и токе возбуждения
Ток якоря
Результирующий ток
Ток возбуждения OL приведет к генерации
Таким образом, вертикальное расстояние переменного тока должно быть равно падению напряжения утечки — реактивному сопротивлению (I a X L )
Треугольник, образованный вершинами a, b, c, называется треугольником Потье.
Принцип работы синхронного двигателя
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть двигателя, а ротор — их вращающаяся часть. Статор возбуждается трехфазным источником питания, а ротор возбуждается источником постоянного тока.
Термин «возбуждение» означает индукцию магнитного поля в статоре и роторе двигателя. Основная цель возбуждения — преобразовать статор и ротор в электромагнит.
Трехфазное питание индуцирует северный и южный полюса статора. Трехфазное питание синусоидальное. Полярность (положительная и отрицательная) их волны меняется после каждого полупериода, и по этой причине северный и южный полюсы также меняются. Таким образом, можно сказать, что на статоре возникает вращающееся магнитное поле.
Магнитное поле создается на роторе из-за источника постоянного тока. Полярность источника постоянного тока становится фиксированной , , и, таким образом, на роторе возникает стационарное магнитное поле. Термин «стационарный» означает, что их северный и южный полюсы остаются фиксированными.
Скорость вращения вращающегося магнитного поля известна как синхронная скорость . Синхронная скорость двигателя зависит от частоты источника питания и количества полюсов двигателя.
N S = 120f / P
Когда противоположные полюса статора и ротора обращены друг к другу, между ними возникает сила притяжения. Сила притяжения развивает крутящий момент против часовой стрелки.Крутящий момент — это сила, которая перемещает объект во вращение. Таким образом, полюса ротора тянулись к полюсам статора.
После каждого полупериода полюс статора меняется на противоположное. Положение ротора остается неизменным из-за инерции. Инерция — это тенденция объекта оставаться в одном положении.
Когда одинаковые полюса статора и ротора обращены друг к другу, между ними возникает сила отталкивания и крутящий момент развивается по часовой стрелке.
Давайте разберемся в этом с помощью схемы. Для простоты рассмотрим, что у двигателя два полюса. На рисунке ниже противоположные полюсы статора и ротора обращены друг к другу. Так между ними возникает сила притяжения.
После полупериода полюса статора меняются местами. Одинаковые полюса статора и ротора обращены друг к другу, и между ними возникает сила отталкивания.
Неоднонаправленный крутящий момент вызывает пульсацию ротора только в одном месте, и по этой причине синхронный двигатель не запускается самостоятельно.
Для запуска двигателя ротор вращается с помощью внешних средств. Таким образом, полярность ротора также изменилась вместе со статором. Полюса статора и ротора блокируют друг друга, и в двигателе возникает однонаправленный крутящий момент. Ротор начинает вращаться со скоростью вращающегося магнитного поля, или, можно сказать, с синхронной скоростью.
Скорость двигателя фиксированная, и двигатель постоянно вращается с синхронной скоростью.
Синхронный двигатель
ЗАДАЧИ
• перечислить основные части конструкции синхронного двигателя.
• определить и описать обмотку амортизатора.
• описывает основные операции синхронного двигателя.
• описать, как коэффициент мощности синхронного двигателя зависит от недовозбужденное постоянное поле, нормально возбужденное постоянное поле и перевозбужденное поле постоянного тока.
• перечислите не менее трех промышленных применений синхронного двигателя.
ил. 1 Синхронный двигатель с возбудителем прямого включения (General Electric Company)
Синхронный двигатель fgr 1 — это трехфазный двигатель переменного тока, который работает на постоянной скорости от состояния холостого хода до полной нагрузки.Этот тип двигатель имеет вращающееся поле, которое возбуждается отдельно от постоянного тока. источник. В этом отношении он похож на трехфазный генератор переменного тока. Если возбуждение де-поля изменяется, коэффициент мощности синхронного двигателя может варьироваться в широком диапазоне запаздывающих и опережающих значений.
Синхронный двигатель используется во многих промышленных приложениях, потому что его фиксированной скоростной характеристики в диапазоне от холостого хода до полной нагрузки. Этот тип двигателя также используется для корректировки или улучшения коэффициента мощности. промышленных цепей трехфазного переменного тока, тем самым снижая эксплуатационные расходы.
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный синхронный двигатель в основном состоит из сердечника статора с трехфазная обмотка (похожая на асинхронный двигатель) вращающееся поле постоянного тока со вспомогательной или амортизационной обмоткой и контактными кольцами, щетками и щеткой держатели и два торцевых щита, в которых размещены подшипники, поддерживающие ротор. вал. Обмотка амортизатора (fgr 2) состоит из встроенных медных стержней. в стержнях полюсов. Медные стержни этого особого типа «беличья клетка». обмотка »приварены к концевым кольцам с каждой стороны ротора.
Обмотка статора и сердечник синхронного двигателя аналогичны. к характеристикам трехфазного асинхронного двигателя с короткозамкнутым ротором и ротора с фазным ротором. Индукционный двигатель. Выводы обмотки статора имеют маркировку T1, T2 и T3 и заканчиваются в выпускной коробке, установленной на боковой стороне корпуса двигателя.
ил. 2 Ротор синхронного двигателя с амортизирующей обмоткой
Ротор синхронного двигателя имеет явные полюса поля.Поле катушки соединены последовательно для чередования полярностей. Количество ротора Количество полюсов поля должно равняться количеству полюсов поля статора. Полевая схема выводы выведены к двум контактным кольцам, установленным на валу ротора для щеточные двигатели. Угольные щетки, установленные в щеткодержателях, контактируют с двумя контактными кольцами. Клеммы полевой цепи подведены из щеткодержателей во вторую клеммную коробку, установленную на раме мотора.Выводы для цепи возбуждения имеют маркировку F и F — короткозамкнутый элемент, или амортизатор, обмотка предусмотрена для запуска, поскольку синхронный без этой функции двигатель не запускается автоматически. Ротор, изображенный на 2 имеет выступающие полюса и обмотку амортизатора.
На синхронном двигателе предусмотрены два торцевых щита. Один из торцевых щитов больше, чем второй экран, потому что в нем находится щеткодержатель постоянного тока монтажные и контактные кольца. Подшипники скольжения или шарикоподшипники используется для поддержки вала ротора.Подшипники также размещаются в конце щитки мотора.
ПРИНЦИП ДЕЙСТВИЯ
Когда на обмотки статора подается номинальное трехфазное напряжение, создается вращающееся магнитное поле. Это поле движется синхронно скорость. Как указано в предыдущих разделах, синхронная скорость магнитного поле зависит от частоты трехфазного напряжения и количества полюсов статора. Следующая формула используется для определения синхронного скорость.
Синхронная скорость = (120 x частота) / количество полюсов
S = (120xf) / п
Магнитное поле, создаваемое обмотками статора, распространяется на синхронная скорость и разрезает короткозамкнутую обмотку ротора. И напряжение, и ток индуцируются в стержнях обмотки ротора. Результирующее магнитное поле обмотки амортизатора (беличьей клетки) реагирует с полем статора, создавая крутящий момент, который заставляет ротор повернуть.
Скорость вращения ротора увеличится до точки немного ниже синхронная скорость статора, от 92 до 97 процентов от номинальная скорость двигателя. Есть небольшое скольжение скорости ротора от скорости магнитного поля, создаваемого статором. Другими словами, двигатель запускается как асинхронный двигатель с короткозамкнутым ротором.
Цепь возбуждения теперь подключена к источнику постоянного тока и закреплена. магнитные полюса устанавливаются в сердечниках поля ротора.Магнитные полюса ротора притягиваются к разным магнитным полюсам магнитного поля настраивается статором.
иллюстрации 20-3 и 20-4 показывают, как полюса поля ротора блокируются с непохожими друг на друга полюса поля статора. Как только полюса поля заблокированы, скорость ротора становится такой же, как скорость магнитного поля, создаваемого статором обмотки. Другими словами, частота вращения ротора теперь равна синхронной. скорость.
Помните, что синхронный двигатель всегда должен запускаться как трехфазный, асинхронный двигатель с короткозамкнутым ротором с отключенным возбуждением постоянного поля.Схема поля постоянного тока добавляется только после того, как ротор разгонится до значения около синхронной скорости. Тогда двигатель будет работать как синхронный. двигатель, синхронизированный с полем вращения статора.
Если предпринята попытка запустить трехфазный синхронный двигатель сначала включение цепи постоянного тока, а затем применение трехфазного напряжения к обмоткам статора двигатель не запустится, так как чистый крутящий момент ноль, в момент подачи трехфазного напряжения на обмотки статора, магнитное поле, создаваемое током статора, поворачивается в синхронном скорость.Ротор с его магнитными полюсами фиксированной полярности притягивается сначала с помощью непохожего полюса статора и пытается повернуться в этом направлении. Однако, прежде чем ротор сможет повернуться, другой полюс статора противоположной полярности перемещается в положение, и ротор затем пытается повернуться в противоположном направлении. направление. Из-за этого действия чередующихся полюсов чистый крутящий момент равен нулю, и двигатель не запускается.
ил. 3 Схема, показывающая принцип работы на синхронном
мотор; больной.4 Пуск синхронных двигателей (ОТРАЖЕНИЕ МЕЖДУ
ПОЛЮСА)
Возбуждение поля постоянным током
В ранних моделях цепь возбуждения возбуждалась внешним постоянным током. источник. Генератор постоянного тока может быть соединен с валом двигателя для питания постоянный ток возбуждения.
илл. 5 показаны соединения для синхронного двигателя. Полевой реостат в отдельно возбуждаемой цепи поля изменяется ток в поле схема.Изменения тока поля влияют на силу магнитного поля. поле, развиваемое вращающимся ротором. Вариации напряженности поля ротора не влияют на двигатель, который продолжает работать с постоянной скоростью. Однако изменения в возбуждении постоянного поля действительно изменяют коэффициент мощности. синхронного двигателя.
Бесщеточное твердотельное возбуждение
Усовершенствованием возбуждения синхронного двигателя является разработка бесщеточный возбудитель постоянного тока.Коммутатор обычного прямого подключения Возбудитель заменен на трехфазный твердотельный выпрямитель мостового типа. Затем выход постоянного тока подается непосредственно на обмотку возбуждения двигателя. Упрощенный схема показана на рисунке 6. Кольцо стационарного поля для возбудителя переменного тока. получает постоянный ток от небольшого выпрямителя в шкафу управления двигателем. Этот выпрямитель питается от источника переменного тока. Постоянное поле возбудителя также регулируется. Твердотельные диоды выпрямителя изменяют выход переменного тока возбудителя на постоянный.Этот DC является источником возбуждения полюсов поля ротора. Кремний-контролируемый выпрямители, активируемые полупроводниковой цепью управления полем, заменить электромеханические реле и контакторы классического щеточного типа синхронный двигатель.
ил. 5 Внешние соединения для синхронного двигателя
Резистор полевого разряда вставляется во время пуска двигателя. У мотора синхронизируя скорость втягивания, цепь разряда поля автоматически открыт и возбуждение постоянного тока приложено к обмоткам полюса возбуждения ротора.Возбуждение автоматически удаляется, если двигатель не работает в такт (синхронизация) из-за перегрузки или пропадания напряжения. Бесщеточный ротор показан на рис. 7. На валу ротора установлен якорь возбудителя переменного тока, выход переменного тока выпрямляется в постоянный ток кремниевыми диодами. Эта система устраняет проблемы с щеткой и коммутатором. (Статор бесщеточный двигатель аналогичен двигателю щеточного типа.)
ил. 6 Упрощенная схема бесщеточного синхронного двигателя:
КОМПОНЕНТЫ, УСТАНОВЛЕННЫЕ НА РОТОР ДВИГАТЕЛЯ
ил.7 Ротор бесщеточного синхронного двигателя.
Коэффициент мощности
Низкий коэффициент мощности при уменьшении тока возбуждения ниже нормы, вставив все сопротивление реостата в полевая схема. Трехфазная цепь переменного тока к статору обеспечивает некоторое намагничивание. ток, который помогает усилить слабое поле постоянного тока. Этот намагничивающий компонент тока отстает от напряжения на 90 электрических градусов. Поскольку намагничивание составляющая тока становится большой частью общего входного тока, результаты с низким запаздывающим коэффициентом мощности.
Если усилить слабое поле постоянного тока, коэффициент мощности улучшится. Как результат, трехфазная цепь переменного тока к статору подает меньший ток намагничивания. Намагничивающая составляющая тока становится меньшей частью общей ток вводится в обмотку статора, и коэффициент мощности увеличивается. Если напряженность поля увеличивается в достаточной степени, коэффициент мощности увеличивается до единицы или 100 процентов. Когда коэффициент мощности равен единице, трехфазная цепь переменного тока не подает ток и поле постоянного тока цепь обеспечивает весь ток, необходимый для поддержания прочного ротора поле.Величина возбуждения постоянного поля, необходимая для достижения единичной мощности фактор называется возбуждением нормального поля.
Если магнитное поле ротора дополнительно усиливается за счет увеличения постоянный ток поля выше значения возбуждения нормального поля, мощность коэффициент уменьшается. Однако коэффициент мощности является ведущим, когда поле постоянного тока перевозбужден, Трехфазная цепь переменного тока, питающая обмотку статора, обеспечивает размагничивающая составляющая тока, противодействующая слишком сильному ротору поле.Это действие приводит к ослаблению поля ротора до нормального. магнитная сила.
Диаграммы на рисунке 8 показывают, как поле постоянного тока поддерживается или противодействует. магнитным полем, создаваемым обмотками переменного тока. В fgr 8 предполагается, что постоянное поле стационарно и вращающийся якорь подключен к источнику переменного тока. Помните, что большинство синхронных двигателей имеют стационарные обмотки переменного тока и вращающееся поле постоянного тока. Однако в любом случае принцип работы такой же.
ил. 8 Возбуждение поля в синхронном двигателе.
ill 9 показывает две характеристические рабочие кривые для трехфазного синхронный двигатель. При нормальном возбуждении полного поля коэффициент мощности имеет пиковое значение единицы или 100 процентов, а переменный ток статора равен самое низкое значение. По мере уменьшения значения постоянного тока возбуждения мощность коэффициент уменьшается в квадранте отставания, что приводит к быстрому росту в переменном токе статора.Если постоянный ток возбуждения увеличивается выше При нормальном возбуждении поля коэффициент мощности уменьшается в ведущем квадранте, что приводит к быстрому увеличению переменного тока статора.
Показано, что синхронный двигатель работает с перевозбужденным Поле постоянного тока имеет ведущий коэффициент мощности. По этой причине трехфазный синхронный двигатель часто подключается к трехфазной промышленной фидерной цепи, имеющей низкий отстающий коэффициент мощности. Другими словами, синхронный двигатель с перевозбужденное поле постоянного тока скорректирует коэффициент мощности промышленного фидерный контур.
ил. 9 Рабочие характеристики синхронных двигателей
В ФГР 10 подключены два асинхронных двигателя с запаздывающими коэффициентами мощности. к промышленной фидерной цепи. Синхронный двигатель, подключенный к тот же фидер работает с перевозбужденным полем постоянного тока. Поскольку синхронный двигатель можно отрегулировать так, чтобы результирующий коэффициент мощности был опережающим, коэффициент мощности промышленного фидера можно корректировать до значение около единицы или 100 процентов.
Реверс вращения
Направление вращения синхронного двигателя меняется на противоположное путем переключения любые два из трех линейных выводов, питающих обмотку статора. Направление вращения двигателя не меняется, если два проводника постоянного тока источник поменяны местами.
ил. 10 Синхронный двигатель, используемый для корректировки коэффициента мощности.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Трехфазный синхронный двигатель используется, когда первичный двигатель имеет требуется постоянная скорость от состояния холостого хода до полной нагрузки, например как вентиляторы, воздушные компрессоры и насосы.Синхронный двигатель используется в некоторых промышленные приложения для управления механической нагрузкой, а также правильной мощности фактор. В некоторых приложениях этот тип двигателя используется только для исправления коэффициент мощности промышленной энергосистемы. Когда синхронный двигатель используется только для корректировки коэффициента мощности и не управляет никакими механическими нагрузки, он служит той же цели, что и батарея конденсаторов, используемых для питания факторная коррекция. Поэтому в такой установке двигатель называется асинхронный конденсатор.
Трехфазные синхронные двигатели мощностью до 10 лошадиных сил, обычно запускаются непосредственно при номинальном трехфазном напряжении. Синхронный двигатели больших размеров запускаются через пусковой компенсатор или автоматический стартер. В этом типе запуска напряжение, приложенное к клеммы двигателя в момент пуска составляют примерно половину значения номинальное сетевое напряжение и пусковой скачок тока ограничены.
РЕЗЮМЕ
Синхронный двигатель переменного тока используется там, где скорость должна быть постоянной.Как следует из названия, двигатель будет работать с расчетной синхронной скоростью. Принцип, используемый в более крупных трехфазных синхронных двигателях, заключается в обеспечении поле постоянного тока для ротора. Методы могут отличаться в зависимости от применения Округ Колумбия. Некоторые двигатели используют внешний источник постоянного тока и подают постоянный ток на ротор. через контактные кольца. Другие двигатели будут управлять магнитным полем ротора и использовать твердотельные выпрямители для создания постоянного тока в роторе. В любом случае, поле ротора может изменить коэффициент мощности синхронного двигателя и позволить ему действовать как источник опережающего коэффициента мощности, тем самым корректируя нормальный коэффициент мощности промышленной энергосистемы.
ВИКТОРИНА ПО ПРОСМОТРАМ :
A. Полностью ответьте на следующие вопросы.
1. Перечислите основные части трехфазного синхронного двигателя. _____
2. Что такое обмотка амортизатора?
3. Объясните правильную процедуру запуска синхронного двигателя. _______
4. Трехфазный синхронный двигатель с шестью полюсами статора и шестью роторами. Полюсы работают от трехфазной 60-герцовой линии с правильным напряжением. рейтинг.Определите скорость двигателя.
5. Как получить опережающий коэффициент мощности с трехфазным синхронным мотор?
6. Для чего нужен реостат в отдельно возбужденном постоянном поле? схема синхронного двигателя? ____
7. Какое направление вращения трехфазного синхронного двигателя? отменено?
8. Назовите два важных применения трехфазных синхронных двигателей.
9. Что такое синхронный конденсатор?
Б.Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенное место.
10. Необходимо запустить синхронный двигатель
а. при полном постоянном токе в цепи возбуждения.
г. при слабом постоянном токе в цепи возбуждения.
г. как асинхронный двигатель.
г. при низком коэффициенте мощности.
11. Скорость синхронного двигателя
а. постоянна от холостого хода до полной нагрузки.
г. падает с холостого хода до полной.
г. увеличивается от холостого хода до полной нагрузки.
г. изменяется от холостого хода до полной нагрузки.
12. Синхронный двигатель с недовозбужденным полем постоянного тока имеет:
а. ведущий коэффициент мощности.
г. отстающий коэффициент мощности.
г. меньшая синхронная скорость.
г. нет эффекта.
13. Коэффициент мощности синхронного двигателя можно изменять, изменяя номер:
а.полярность кисти.
г. чередование фаз.
г. скорость вращения.
г. Возбуждение поля.
14. Синхронный двигатель, работающий от трехфазного сетевого напряжения, обслуживает та же функция коррекции коэффициента мощности, что и _______
а. банк резисторов.
г. батарея конденсаторов.
г. асинхронный двигатель.
г. двигатель с фазным ротором.
Управление промышленными двигателями: синхронные двигатели
Goals :
- Обсудите работу синхронного двигателя.
- Перечислите различия между синхронными двигателями и двигателями с короткозамкнутым ротором.
- Объясните назначение обмотки амортизатора.
- Обсудите, как синхронный двигатель может обеспечить опережающий коэффициент мощности.
- Обсудите работу бесщеточного возбудителя.
Синхронные двигатели названы так из-за их способности работать при синхронная скорость. Они способны работать со скоростью вращения магнитное поле, потому что они не являются асинхронными двигателями.Они выставляют другие характеристики, которые отличают их от беличьей клетки или ротора с обмоткой асинхронные двигатели. Вот некоторые из этих характеристик:
• Они могут работать с синхронной скоростью.
• Они работают с постоянной скоростью от холостого хода до полной нагрузки. Синхронный двигатели либо будут работать с синхронной скоростью, либо остановятся и остановятся.
• Они могут обеспечить ведущий коэффициент мощности.
• Иногда они работают без нагрузки, чтобы помочь исправить мощность установки. фактор.В этом режиме работы они называются синхронными конденсаторами.
• Ротор необходимо возбуждать внешним источником постоянного тока.
• Они содержат специальную обмотку с короткозамкнутым ротором, называемую амортизатором. обмотка, которая используется для запуска двигателя.
Рис. 1 Ротор синхронного двигателя.
Запуск синхронного двигателя
Используется специальная обмотка с короткозамкнутым ротором, называемая амортизационной обмоткой. для запуска синхронного двигателя.Показан ротор синхронного двигателя. в илл. 1.
Обмотка амортизатора очень похожа на обмотку типа «беличья клетка». Он обеспечивает хороший пусковой момент и относительно низкий пусковой ток. Как только синхронный двигатель разгонится до скорости, близкой к скорости вращающегося магнитного поля, ротор возбуждается, подключая его к источник постоянного тока. Возбуждение ротора вызывает наматывание полюсных наконечников. ротор стать электромагнитами.Эти электромагниты блокируются вращающееся магнитное поле статора и двигателя работает синхронно скорость. Синхронный двигатель никогда не следует запускать с возбуждением. к ротору. Магнитное поле полюсных наконечников будет попеременно притягивается и отталкивается вращающимся магнитным полем, в результате чего нет крутящий момент создается в любом направлении.
Однако высокое индуцированное напряжение может повредить обмотки ротора и другие компоненты, включенные в цепь ротора.Ток возбуждения должен быть подключенным к ротору только после того, как он разгонится до скорости, близкой к синхронной.
Ток возбуждения
Есть несколько способов подачи тока возбуждения в ротор синхронного двигателя, такой как контактные кольца, бесщеточный возбудитель и генератор постоянного тока.
Малые синхронные двигатели обычно содержат два контактных кольца на роторе. вал. Набор щеток используется для подачи постоянного тока на ротор. (Больной.2). Если используется ручной запуск, оператор вручную возбудит ротор после того, как он разогнался до скорости, близкой к синхронной. Во время этого процесса ускорения, высокое напряжение может быть индуцировано в обмотках ротор. Подключен резистор, называемый резистором полевого разряда. параллельно обмотке ротора. Его функция — ограничить количество индуцированного напряжения при запуске двигателя и ограничить количество наведенного напряжение, вызванное схлопывающимся магнитным полем, когда двигатель остановлен и ток возбуждения отключен.Переключатель, называемый полевым разрядом переключатель используется для подключения тока возбуждения к ротору. Выключатель спроектирован так, что когда он закрыт, он будет подключаться к прямому текущий источник питания до того, как он разорвет связь с полевым разрядом резистор. Когда переключатель открыт, он подключается к полю. разрядный резистор до того, как он разорвет связь с постоянным током источник питания. Это позволяет всегда подключать резистор полевого разряда. к ротору, когда на ротор не подается возбуждение постоянным током.
Рис. 2 Резистор полевого разряда подключен параллельно ротору.
обмотка при пуске.
Рис. 3 Бесщеточный возбудитель содержит стационарные электромагниты.
Рис. 4 Базовая схема бесщеточного возбудителя
Бесщеточный возбудитель
Второй способ подачи тока возбуждения на ротор — это бесщеточный возбудитель. Бесщеточный возбудитель имеет преимущество в том, что нет щеток или контактных колец для ношения.Бесщеточный возбудитель в основном небольшая трехфазная обмотка генератора и трехфазный выпрямитель, расположенный на валу ротора. См. Фото на рис. 1. Сзади. ротора видна небольшая обмотка. Это намотка кисти меньше возбудителя. Электромагниты расположены по обе стороны от обмотки (рис. 3). Трехфазный выпрямитель и предохранители также расположены на валу ротора. Выпрямитель преобразует трехфазный переменный ток, производимый в обмотка генератора переменного тока на постоянный ток перед подачей на обмотка ротора (илл.4). Величина тока возбуждения, подаваемого на обмотка ротора регулируется величиной постоянного тока, подаваемого на электромагниты. Выходное напряжение обмотки генератора регулируется. магнитной индукцией полюсных наконечников.
Генератор постоянного тока
Другой способ подачи тока возбуждения — использование самовозбужденного генератор постоянного тока установлен на валу ротора. Количество возбуждения ток регулируется путем управления током возбуждения генератора.Выход якоря обеспечивает ток возбуждения для ротора. Поскольку генератор самовозбуждающийся, он не требует внешнего источника. постоянного тока. Хотя это преимущество перед возбуждением ток через контактные кольца или с помощью бесщеточного возбудителя, генератор делает содержат коммутатор и щетки. Генератор обычно требует больше обслуживание, чем другие методы.
Автоматический пуск для синхронных двигателей
Синхронные двигатели могут запускаться как автоматически, так и вручную.Одним из преимуществ синхронного двигателя является то, что он обеспечивает хороший пуск. крутящий момент при относительно низком пусковом токе. Многие большие двигатели способны быть запущенным прямо через линию из-за этой особенности. Если Энергокомпания не разрешит запуск синхронных двигателей через линию также может использоваться пуск автотрансформатора, пуск реактора или звезда-треугольник начиная. Независимо от метода подключения обмотки статора к линии электропередачи, основная часть автоматического управления для синхронного двигатель заключается в подключении тока возбуждения к ротору в правильном время.Используемый метод определяется способом возбуждения применяется к ротору.
В случае ручного возбуждения используется переключатель полевого разряда. В схемах бесщеточного возбудителя часто используются электронные устройства для измерения скорость ротора для подключения возбуждения постоянного тока к ротору в надлежащем время. Если для обеспечения тока возбуждения используется генератор постоянного тока, специальный полевой контактор, реле выдержки и частоты поляризованного поля реле обычно используются.
Полевой контактор
Полевой контактор очень похож на обычный трехполюсный контактор. (Илл. 5). Однако это не стандартный контактор. Полевой контактор содержит катушку постоянного тока и возбуждается током возбуждения ротора.
Контактор возбуждения выполняет ту же функцию, что и переключатель разряда возбуждения. обсуждалось ранее. Два внешних контакта подключают и отключают ток возбуждения в цепи ротора.Средний контакт подключает и отключает резистор разряда возбуждения в нужное время.
Реле сбоя
Реле задержки на самом деле является таймером, который содержит токовый катушка вместо катушки, управляемой напряжением.
Катушка последовательно подключена к разрядному резистору возбуждения. В Таймер может быть пневматическим, дашпотным или электронным. Тип дашпота не в ногу реле показано на рис. 6. Функция реле отключения шага заключается в отключении двигатель от сети в случае, если ротор не возбужден в течение определенного периода времени.Большие синхронные двигатели могут быть повреждены чрезмерным пусковым током, если ротор не возбуждается в течение короткого время.
Реле частоты поляризованного поля
Реле частоты поляризованного поля (рис. 7) отвечает за обнаружение частота вращения ротора и контроль работы полевого контактора. Реле частоты поляризованного поля (PFR) используется вместе с реактор. Реактор включен в цепь ротора синхронной мотор.Реле частоты поляризованного поля содержит две отдельные катушки, один постоянный ток и один переменный ток (рис. 8). Катушка A — это катушка постоянного тока, подключенная к источник возбуждения постоянного тока. Его функция — поляризовать магнитное поле. основной материал реле. Катушка B — это катушка переменного тока. Эта катушка подключена параллельно с реактором (илл. 9). Чтобы понять работу цепи, сначала рассмотрим путь магнитного потока, если только постоянный ток катушка ПФР находится под напряжением (рис.10). Обратите внимание, что путь потока проходит через поперечина, а не концы эстафеты. Поскольку флюс не достигает концы полюсного наконечника, якорь не притягивается и контакт остается закрытым.
Однако при запуске синхронного двигателя вращающийся магнитный поле статора индуцирует переменное напряжение в обмотке ротора. Ток существует путь через реактор, резистор полевого разряда и катушку реле сбоя. Поскольку наведенное напряжение составляет 60 Гц в момент запуска, индуктивное сопротивление реактора вызывает большую часть тока ротора протекать через катушку переменного тока поляризованного поля реле частоты.Поскольку через катушку переменного тока течет переменный ток PFR, каждый полупериод поток, создаваемый в катушке переменного тока, противодействует поток, создаваемый катушкой постоянного тока. Это приводит к отвлечению потока постоянного тока на концы полюсных наконечников, где он сочетается с потоком переменного тока, в результате в достаточно сильном потоке, чтобы притягивать якорь, открывая нормально закрытый контакт (илл. 11).
Рис. 5 Полевой контактор, используемый для запуска синхронного двигателя.
ил.6 Реле сбоя.
Рис. 7 Реле частоты поляризованного поля.
Рис. 8 Реле частоты поляризованного поля содержит катушки постоянного и переменного тока.
Рис. 9 Цепь управления синхронным двигателем
Рис. 10 Путь магнитного потока, создаваемого только катушкой постоянного тока.
Рис. 11 Поток катушек переменного и постоянного тока объединяется для притяжения якоря.
В этом типе управления генератор постоянного тока используется для питания ток возбуждения ротора.При первом подаче питания на обмотка статора, ротор не вращается и генератор постоянного тока не производит выходное напряжение. Однако вращающееся магнитное поле вызывает высокую напряжение в обмотках ротора, обеспечивая большой ток для катушка переменного тока реле частоты поляризованного поля. Когда ротор начинается чтобы повернуться, генератор постоянного тока начинает вырабатывать напряжение, подавая мощность для катушки постоянного тока PFR. Комбинированный поток двух катушек вызовет нормально замкнутый контакт PFR должен размыкаться до срабатывания полевого реле.По мере увеличения скорости ротора в цепи ротора индуцируется меньшее напряжение переменного тока, и частота уменьшается пропорционально скорости ротора. Поскольку частота уменьшается, индуктивное сопротивление реактора становится меньше, в результате чего через реактор проходит больший ток, а через катушку переменного тока — меньше. AC Катушка PFR производит все меньше и меньше магнитного потока по мере увеличения скорости ротора. Когда ротор достигает около 90% синхронной скорости, поток переменного тока не может дольше поддерживать путь тока через якорь PFR, а поток постоянного тока возвращается на путь, как показано на рис.10. Когда арматура отпадет, он повторно замыкает контакт PFR и подключает катушку полевого реле к линия. Когда полевое реле срабатывает, постоянный ток подключается к цепь ротора и резистор разряда возбуждения и реле анти-шага отключены от линии.
Коррекция коэффициента мощности
Как указывалось ранее, синхронные двигатели могут производить ведущие фактор силы. Синхронный двигатель может производить ведущую мощность. фактор из-за чрезмерного возбуждения ротора.Если ротор недовозбужден, двигатель будет иметь запаздывающий коэффициент мощности, аналогичный беличьей клетке или ротору с обмоткой Индукционный двигатель. Причина этого в том, что при постоянном токе возбуждения слишком мала, часть переменного тока, подаваемого на обмотку статора, используется для намагничивания железа в двигателе.
Нормальное возбуждение достигается, когда величина тока возбуждения равна достаточно для намагничивания железного сердечника двигателя и отсутствия переменного тока требуется для.
Есть два условия, которые будут указывать на то, что нормальное возбуждение достигнуто:
1. Ток, подаваемый на двигатель, упадет до самого низкого уровня.
2. Коэффициент мощности будет равен 100% или единице.
Если подается ток возбуждения, превышающий нормальный, возникает перевозбуждение. В этом состоянии постоянный ток возбуждения чрезмерно намагничивает железо. двигатель, и часть переменного тока в линии используется для размагничивания железо.Процесс размагничивания приводит к тому, что линейный ток переменного тока опережает напряжение аналогично конденсатору.
Рис. 12 Синхронный двигатель мощностью 2500 л.с., приводящий в движение водяной циркуляционный насос.
Приложения
Благодаря своим пусковым характеристикам и способности корректировать коэффициент мощности, синхронные двигатели обычно используются там, где двигатели большой мощности необходимы.
Они часто служат источником энергии для насосов, компрессоров, центрифуг и больших измельчителей.Синхронный двигатель мощностью 2500 лошадиных сил, используемый для привода воды. Циркуляционный насос показан на рис. 12.
ВИКТОРИНА:
1. Как называется синхронный двигатель, когда он работает без нагрузки и используется для коррекции коэффициента мощности?
2. Что такое обмотка амортизатора и какую функцию она выполняет?
3. Если ток возбуждения должен быть приложен к ротору синхронного мотор до того, как он завелся?
4. Какова функция разрядного резистора возбуждения?
5.Что контролирует выходное напряжение генератора при бесщеточном возбудитель используется для подачи тока возбуждения ротора?
6. Для чего нужна катушка постоянного тока в реле частоты поляризованного поля?
7. Каково назначение реле отсутствия шага?
8. Почему синхронный двигатель может работать со скоростью вращающегося магнитного поля?
9. Назовите два фактора, которые указывают на наличие нормального тока возбуждения. применяется к мотору.
10. Как сделать синхронный двигатель с опережающим коэффициентом мощности?
Модель схемы синхронной машины
Модель схемы синхронной машиныМодель цепи синхронной машины — Предполагая линейность магнитной цепи, можно получить простую модель цепи синхронной машины. Справедливость этого предположения проистекает из того факта, что воздушный зазор является преобладающим компонентом магнитной цепи машины.Приближенному нелинейному анализу посвящен разд. 8.4.
Согласно формуле. (8.7) результирующий вектор mmf равен
Результирующий магнитный поток Or и эдс Er воздушного зазора обычно должны быть получены из Fr. Однако предположение о линейной магнитной цепи (0 = TF; P — постоянная магнитная проницаемость *) позволяет найти результирующий поток по принципу суперпозиции как
Так как индуцированная ЭДС пропорциональна потоку на полюс (уравнение (8.6)) и отстает от него на 90 °, то согласно уравнению вектора вектора потока.(8.15) уравнение вектора ЭДС можно записать как
Векторы ЭДС в уравнении. (8.16) пропорциональны соответствующим векторам потока уравнения (8). (8.15) с отставанием векторов ЭДС от соответствующих векторов потока на 90 °. Векторные уравнения (8.15) и (8.16) представлены векторной диаграммой на рис. 8.9. На этом рисунке треугольник вектора потока и треугольник вектора ЭДС похожи друг на друга, при этом треугольник вектора ЭДС повернут против часовой стрелки от треугольника вектора потока на 90 °.Поскольку cp ar находится в фазе с Ia (генераторная машина) и пропорциональна ему, ЭДС Ear пропорциональна ** la и отстает от него на 90 °, т.е.
, где Arar, постоянная пропорциональности, действительно является индуктивным реактивным сопротивлением. «Таким образом, уравнение. (8.16) можно записать как
, что соответствует формуле. (8.18), Рис. 8.10 (a) дает модель синхронной машины для каждой фазы. Сравнивая уравнения (8.15), (8.16) и (8.18), можно сделать вывод, что реактивное сопротивление Xar эквивалентно заменяет влияние потока реакции якоря.Если Xar известен для машины, можно работать с терминами напряжений и токов, и нет необходимости представлять потоки на векторной диаграмме.
Влияние сопротивления якоря Ra и реактивного сопротивления рассеяния X / выражается в векторном уравнении как (см. Уравнение (8.11))
Из уравнения. (8.19) и рис. 8.10 (a) следует модели полной схемы на рис. 8.10 (b), которая может быть сведена к более простой форме, показанной на рис. 8.10 (c), путем объединения последовательных реактивных сопротивлений и разрешения идентичности Er быть потерянный.В модели схемы на рис. 8.10 (c) полное реактивное сопротивление
известен как синхронное реактивное сопротивление машины, а
— это синхронный импеданс машины.
Синхронное реактивное сопротивление учитывает поток, создаваемый потоком сбалансированных трехфазных токов в статоре, а также поток утечки. Возбуждение эдс, E fi учитывает поток, создаваемый полем ротора (возбужденным постоянным током).Величиной ЭДС возбуждения можно управлять с помощью постоянного тока поля (I f ), называемого током возбуждения. Если нагрузка на машину сброшена, на клеммах машины появляется E f , что тогда является напряжением разомкнутой цепи машины. Со ссылкой на рис. 8.10 (c) E f также называется напряжением после синхронного импеданса или реактивным сопротивлением (так как R a можно пренебречь).
Здесь следует помнить, что модель синхронного импеданса синхронной машины основана на предположении линейности и будет верна для ненасыщенной области работы машины и действительна только для машины с цилиндрическим ротором.
Диапазон синхронного сопротивления
Выраженное в системе pu, синхронное реактивное сопротивление синхронных машин находится в узком диапазоне значений. Из практических данных видно, что сопротивление якоря (R a ) обычно составляет порядка 0.01 о.е., т.е. падение напряжения на сопротивлении якоря при номинальном токе якоря составляет около 1% от номинального напряжения. Значение реактивного сопротивления утечки находится в диапазоне от 0,1 до 0,2 о.е., а синхронное реактивное сопротивление (X с , = Xar + X 1 ) имеет порядок от 1,0 до 2 о.е. Таким образом, видно, что сопротивление якоря синхронной машины настолько низкое, что им можно пренебречь для всех практических целей, кроме расчета потерь, повышения температуры и КПД.Здесь можно отметить, что R a должны быть небольшими, чтобы минимизировать потери 1 2 R и ограничить повышение температуры машины, а X s должны быть большими, чтобы ограничить максимальный ток, который может протекать в условиях неисправности (короткого замыкания).
