Как устроены схемы управления лифтами УЛЖ-10 и УЛЖ-17. Из каких блоков состоят эти системы. Какие функции выполняет каждый блок схемы. Как происходит управление движением кабины и дверями лифта. Какие преимущества дает использование микроэлектроники в этих системах.
Общая структура систем управления лифтами УЛЖ-10 и УЛЖ-17
Системы управления лифтами типов УЛЖ-10 и УЛЖ-17 предназначены для управления пассажирскими лифтами в жилых зданиях со скоростью движения кабины от 0,7 до 1,4 м/с. Эти системы имеют схожую структуру и состоят из следующих основных блоков:
- Силовая схема
- Блок управляющих реле (БУР)
- Блок управления логический (БУЛ)
Рассмотрим подробнее назначение и функции каждого из этих блоков.
Силовая схема лифтов УЛЖ-10 и УЛЖ-17
Силовая схема включает в себя следующие основные элементы:
- Двухскоростной асинхронный электродвигатель с короткозамкнутым ротором М1 для привода подъема кабины
- Электродвигатель М2 для привода дверей кабины
- Тормозной электромагнит BY
- Автоматические выключатели QF1, QF3
Силовая схема обеспечивает подачу питания на электродвигатели и другие исполнительные устройства лифта по командам от блока управления.
Блок управляющих реле (БУР) в системах УЛЖ-10 и УЛЖ-17
Блок управляющих реле выполняет функцию связующего звена между логическим блоком управления и силовой схемой. В состав БУР входят:
- Катушки магнитных пускателей KM1-KM7
- Промежуточные реле KL1-KL14
БУР преобразует логические сигналы от БУЛ в силовые команды для включения/выключения соответствующих элементов силовой схемы.
Блок управления логический (БУЛ) лифтов УЛЖ-10 и УЛЖ-17
Блок управления логический является «мозговым центром» системы управления лифтом. Он выполнен на микросхемах серии К561 и включает в себя следующие функциональные ячейки:
- Ячейка гальванических развязок (ЯГР)
- Ячейка регистрации (ЯР)
- Ячейка выбора направления (ЯВН)
- Ячейка логического управления (ЯЛУ)
- Ячейка управления дверьми (ЯУД)
Рассмотрим подробнее функции каждой из этих ячеек.
Функции ячеек блока управления логического (БУЛ)
Ячейка гальванических развязок (ЯГР)
Ячейка гальванических развязок обеспечивает электрическую изоляцию между цепями низкого напряжения БУЛ и силовыми цепями лифта. Это повышает помехозащищенность и безопасность системы управления.
Ячейка регистрации (ЯР)
Ячейка регистрации выполняет следующие функции:
- Организация опроса кнопок приказов и вызовов
- Опрос выключателей дверей шахты
- Регистрация приказов и вызовов на этажах
Таким образом, ЯР обеспечивает сбор информации о командах пассажиров и состоянии дверей шахты.
Ячейка выбора направления (ЯВН)
Ячейка выбора направления определяет направление движения кабины лифта (вверх или вниз) в автоматических режимах работы — «нормальная работа» и «нагрузка».
Ячейка логического управления (ЯЛУ)
Ячейка логического управления является центральным элементом БУЛ и выполняет следующие ключевые функции:
- Реализация различных функциональных защит и блокировок
- Формирование сигналов уровня скорости движения кабины
- Формирование сигналов положения и форсировки тормоза
- Выбор направления движения для режимов «ревизия» и «управление из машинного зала»
- Выбор скорости движения кабины
Ячейка управления дверьми (ЯУД)
Ячейка управления дверьми отвечает за следующие функции:

- Формирование сигналов на открывание и закрывание дверей
- Определение местоположения кабины лифта
- Реализация функции узла охраны шахты
Принцип работы системы управления лифтами УЛЖ-10 и УЛЖ-17
Рассмотрим основные этапы работы системы управления:
- Опрос и регистрация сигналов кнопок вызова и приказов
- Определение текущего местоположения кабины
- Выбор направления движения
- Выбор скорости движения
- Управление тормозом
- Управление дверьми
Опрос и регистрация сигналов кнопок
В режиме «нормальная работа» происходит циклический опрос кнопок вызовов и приказов короткими импульсами. При нажатии кнопки на общую шину поступает соответствующий импульс, после чего происходит регистрация сигнала.
Определение местоположения кабины
Местоположение кабины определяется счетным способом. При движении вверх каждое срабатывание датчика замедления «вверх» увеличивает код местоположения на единицу. При движении вниз срабатывание датчика замедления «вниз» уменьшает код на единицу. Для корректировки используются реперные точки и информация от дверных контактов.
Выбор направления движения
Направление движения в автоматических режимах определяется в ячейке ЯВН. Для режимов «ревизия» и «управление из машинного зала» направление задается в ячейке ЯЛУ.
Выбор скорости движения
Система рассчитана на управление двухскоростным двигателем и обеспечивает две скорости движения — большую и малую. Выбор скорости осуществляется в ячейке ЯЛУ. В режиме «ревизия» используется только малая скорость.
Управление тормозом
Включение тормозного электромагнита происходит одновременно с подачей напряжения на главный двигатель. Реализована форсировка включения тормоза для быстрого растормаживания.
Управление дверьми
Открытие дверей происходит по достижении заданного адреса и нахождении кабины в зоне точной остановки. В особых режимах (пожарная опасность, перегрев двигателя) сигнал на открытие дверей формируется в ЯЛУ.
Преимущества использования микроэлектроники в системах УЛЖ-10 и УЛЖ-17
Применение микросхем серии К561 в блоке управления логическом позволило достичь следующих преимуществ:
- Повышение надежности системы управления за счет уменьшения количества электромеханических элементов
- Расширение функциональных возможностей (реализация сложных алгоритмов управления)
- Уменьшение габаритов и энергопотребления системы управления
- Повышение точности позиционирования кабины
- Улучшение плавности хода лифта
Особенности эксплуатации и обслуживания систем УЛЖ-10 и УЛЖ-17
При эксплуатации и обслуживании систем управления лифтами УЛЖ-10 и УЛЖ-17 следует учитывать следующие особенности:
- Необходимость периодической проверки и очистки контактов реле и пускателей
- Важность поддержания чистоты в шкафу управления для обеспечения нормального теплового режима электронных компонентов
- Необходимость регулярной проверки состояния датчиков и выключателей
- Важность соблюдения правил электробезопасности при работе с системой управления
Правильное обслуживание и своевременная замена изношенных элементов позволяет обеспечить длительную и надежную работу систем управления УЛЖ-10 и УЛЖ-17.

Перспективы развития систем управления лифтами
Несмотря на то, что системы УЛЖ-10 и УЛЖ-17 достаточно надежны и функциональны, современные тенденции в области лифтостроения направлены на дальнейшее совершенствование систем управления. Основные направления развития включают:
- Применение более мощных микроконтроллеров для реализации сложных алгоритмов управления
- Внедрение систем частотного регулирования скорости двигателей
- Использование сенсорных панелей управления
- Интеграция систем управления лифтами в общую систему «умного дома»
- Повышение энергоэффективности за счет применения рекуперативных приводов
Эти инновации позволят сделать лифты еще более комфортными, безопасными и энергоэффективными.
Заключение
Системы управления лифтами УЛЖ-10 и УЛЖ-17 представляют собой сложные электромеханические устройства, в которых удачно сочетаются надежность релейно-контакторных схем и гибкость микроэлектронного управления. Понимание принципов работы этих систем необходимо для их грамотной эксплуатации и обслуживания, а также для дальнейшего совершенствования лифтового оборудования.
Лифты с НКУ типов УЛЖ-10 и УЛЖ-17
4.4.
Условные обозначения в электрических схемах лифтов нового поколения
выполняются латинскими буквами и приведены в табл. 5.1.
Характеристики электропривода и автоматики. Излагаемый материал желательно изучать, пользуясь в качестве иллюстрации релейной частью электрической схемы лифта.
Для управления лифтом применяется НКУ типа УЛЖ-10 или УЛЖ-17. Подача напряжения на лифт осуществляется через вводное устройство QBI с емкостным фильтром, предотвращающим распространение радиопомех в питающую сеть.
Таблица 4.1
Обозначение
Наименование
SB5
Кнопка «Деблокировка» («ДБ»)
Е\
Лампа освещения блока
QF4
Выключатель автоматический
SA3
Тумблер включения лампы Е\
SB 1
Кнопка «Вверх»
SHI (SB2)
Кнопка «Вниз»
SCI
Кнопка «Стоп-М»
SO (SB3)
Кнопка «Точная остановка»
71-73
Трансформаторы понижающие (220/13,5 В)
XS3 (XP)
Разъем
XT
Клеммный зажим
sm, S6, S7
Кнопки подключения цепи переключателей 52 и S9
VD4, ГО8, VD9
Светодиоды
Главный привод лифта выполнен с применением
двухскоростного асинхронного электродвигателя с короткозамкнутым ротором
М/1, в обмотку которого для контроля ее температуры заложены позисторы
(терморезисторы). Если электродвигатель М/1 оснащен устройством
принудительной вентиляции с мотором А/3, то в его обмотку встроены два
однотипных позистора — RT1 и RT2. Позисторы расположены в разных местах
статора, в которых скорость повышения температуры обмотки неодинакова.
Поэтому их срабатывание (резкое увеличение сопротивления до величины
(2100 ± 400) Ом) происходит следующим образом: вначале срабатывает
позистор RT2, подающий сигнал на включение вентилятора Л/3, а затем, при
дальнейшем росте температуры обмотки, — позистор RTI, подающий сигнал на
отключение электродвигателя М/1. При отсутствии вентилятора в обмотку
электродвигателя Ml закладывается позистор RTI.
Если электродвигатель М/1 оснащен устройством
принудительной вентиляции с мотором А/3, то в его обмотку встроены два
однотипных позистора — RT1 и RT2. Позисторы расположены в разных местах
статора, в которых скорость повышения температуры обмотки неодинакова.
Поэтому их срабатывание (резкое увеличение сопротивления до величины
(2100 ± 400) Ом) происходит следующим образом: вначале срабатывает
позистор RT2, подающий сигнал на включение вентилятора Л/3, а затем, при
дальнейшем росте температуры обмотки, — позистор RTI, подающий сигнал на
отключение электродвигателя М/1. При отсутствии вентилятора в обмотку
электродвигателя Ml закладывается позистор RTI.
Схема тормозного электромагнита питается двухфазным сетевым
напряжением, которое после выпрямления подается на катушку
электромагнита YA1. В схеме предусмотрен режим форсирования,
обеспечивающий быстрое втягивание якоря электромагнита и выключение
(растормаживание) тормоза. Режим действует в течение 0,5…0,8 с и
снимается введением в цепь катушки YА1 резистора R2, ограничивающего ток
в цепи требуемым значением.
Режим действует в течение 0,5…0,8 с и
снимается введением в цепь катушки YА1 резистора R2, ограничивающего ток
в цепи требуемым значением.
Привод дверей кабины приводится в действие односкоростным
асинхронным электродвигателем с короткозамкнутым ротором М2. Для
исключения ударов створок друг о друга или об упоры, а также водила об
упоры к обмотке электродвигателя М2 подключена цепь динамического
торможения. Режим динамического торможения действует при завершении
открывания или закрывания дверей в течение 0,2 с. В этом режиме работы
электродвигатель
тормозит привод дверей. Сигналы на перевод работы электродвигателя М2 в режим динамического торможения подаются от выключателя SDI или SD2. Сигнал на реверсирование дверей в случае соприкосновения створки с препятствием поступает от выключателя SD3.
На основном посадочном этаже и в кабине лифта установлены табло
индикации АН1 и АН2, которые указывают номер этажа и направление
движения кабины.
Для вызова кабины на каждом этаже установлен вызывной аппарат АВ, который включает в себя 3-контакт SB с самовозвратом, резистор R и сигнальную лампу или светодиод EL.
В купе кабины установлен приказной аппарат АК1 с кнопками приказа с
самовозвратом 1S— (B)S, «Стоп» SC2 и (или) «Двери» SD, резисторами 1R1 —
(B)R1 и сигнальными лампами или светодиодами IHL—(B)HL. Кроме того, в
посту могут устанавливаться сигнальные лампы «Перегрузка» с резисторами,
кнопка вызова персонала SV, микрофон ВМ и динамик BF.
Регистрация вызовов и приказов выполняется в БУЛе на ИМС. Вызов или приказ считается зарегистрированным, если после отпускания кнопки в вызывном или приказном аппарате остается включенной соответствующая сигнальная лампа.
На крыше кабины установлен пост управления лифтом в режиме «Ревизия» АК2
с кнопками «Вверх» SB2, «Вниз» Sh3 и ключом SA1. Кнопки имеют по одному
3- и P-контакту. На верхней балке крыши кабины предусмотрена кнопка »£45
для шунтирования контактов дверей шахты.
На верхней балке крыши кабины предусмотрена кнопка »£45
для шунтирования контактов дверей шахты.
Кабина оборудована подвижным полом, ход которого контролируется тремя выключателями: SPl, SP2 и SP3, контакты которых размыкаются соответственно при нагрузке кабины 15 кг, 90 и 110% номинальной грузоподъемности. Для лифтов грузоподъемностью 400 (320) кг выключатель SP3 не устанавливается.
В лифте применен счетный способ определения местонахождения кабины в
шахте, который реализуется при помощи выключателей (датчиков) с
магнитоуправляемыми (герконовыми) контактами типа ДПЭ-101 или ВПЛ11.
Кроме того, возможно применение фотодатчиков типа ВШИ 2.
Схема расположения выключателей (датчиков) и шунтов при счетном способе определения местонахождения кабины приведена на рис. 4.1.
На крыше кабины сбоку установлены три выключателя: точной остановки SQI,
замедления вверх SQ2 и замедления вниз SQ3. Сигналы от выключателей SQ1
или SQ2 и SQ3 поступают в БУЛ при нахождении кабины в данный момент
соответственно в точной остановке или в зоне замедления какого-либо
этажа. При помощи SQ1 выполняется точная остановка кабины на этаже, а в
результате действия SQ2 или SQ3 — счет остановок при движении кабины
вверх или вниз. В шахте на каждом этаже, кроме крайних, установлено по
три шунта, которые воздействуют на соответствующие выключатели кабины.
На крайних этажах установлено по два шунта: на верхнем — для
выключателей SQI и SQ2, на нижнем — для выключателей SQI и SQ3.
Сигналы от выключателей SQ1
или SQ2 и SQ3 поступают в БУЛ при нахождении кабины в данный момент
соответственно в точной остановке или в зоне замедления какого-либо
этажа. При помощи SQ1 выполняется точная остановка кабины на этаже, а в
результате действия SQ2 или SQ3 — счет остановок при движении кабины
вверх или вниз. В шахте на каждом этаже, кроме крайних, установлено по
три шунта, которые воздействуют на соответствующие выключатели кабины.
На крайних этажах установлено по два шунта: на верхнем — для
выключателей SQI и SQ2, на нижнем — для выключателей SQI и SQ3.
В шахте лифта расположены два выключателя: на нижнем этаже — выключатель
нижнего этажа SQ4, на верхнем — выключатель верхнего этажа SQ5. Сбоку
кабины установлен шунт, воздействующий на один из этих выключателей при
нахождении кабины несколько выше зоны замедления верхнего или ниже зоны
замедления нижнего этажа, а также в зоне точной остановки крайнего
этажа. Вначале шунт замедления воздействует на выключатель SQ2 или SQ3,
а затем, при дальнейшем перемещении кабины, шунт взаимодействует с
выключателем SQ4 или SQ5. Сигналы от выключателей SQ4 или SQ5 поступают
в БУЛ.
Вначале шунт замедления воздействует на выключатель SQ2 или SQ3,
а затем, при дальнейшем перемещении кабины, шунт взаимодействует с
выключателем SQ4 или SQ5. Сигналы от выключателей SQ4 или SQ5 поступают
в БУЛ.
При помощи этих выключателей осуществляются:
• выбор направления движения и замедление кабины при работе лифта в режимах «МП1», «МП2» и «РВ»;
• запись кода первого или верхнего этажа в счетчик остановок (находится в БУЛе) при включении лифта в работу;
• проверка правильности работы счетчика остановок; корректировка информации, записанной в счетчике остановок, при сбоях в его работе.
Для проверки исправности цепей контактов выключателей дверей шахты (3— ISMl, ISM2-01-6-2SMI, 2SM2-02-6-(В)5М1, (В)5М2 —(В)-6 —64), кабины (SE1) и устройств безопасности (3 — SCI -75-1-75-SE5-74- SE4-73- SAS-72-2-SE7-72—SE6—72- — SE3 — 71 — SE2—71-1 — K18—69—SC2— 213) в схеме предусмотрены:
• вывод проводов от этих контактов в БУЛ;
• установка в БУЛе для поиска неисправных участков цепи в УЛЖ-10 —
переключателя S2, резистора /?1, светодиода VD4 и кнопки SfV6; в УЛЖ-17
— переключателей S2 и 59, резисторов /?1 и R2, светодиодов VD& и VD9,
кнопок S6 и S7.
В БУЛе на логических ячейках имеются световые индикаторы, информирующие о работе электрической схемы лифта, а также предусмотрены электронные устройства, осуществляющие контроль за работой отдельных узлов электрической схемы лифта и различные виды защиты.
Рис. 4.1. Схема расположения выключателей
(датчиков) и шунтов при счетном способе определения местонахождения
кабины
26.5.4. Типовые схемы электроприводов лифтов
В лифтах и грузовых подъемниках типы электроприводов выбираются в зависимости от скорости движения, этажности здания и требуемой точности остановки.
В настоящее время применяют следующие электроприводы:
а)
для зданий до 17 этажей используются
тихоходные и быстроходные лифты со
скоростью от 0,7 до 1,4м/с типа УЛЖ-10, УЛЖ-17
грузоподъемностью 320,400кг. В этих лифтах
применяют электропривод с асинхронным
двухскоростным электродвигателем с
короткозамкнутым ротором;
В этих лифтах
применяют электропривод с асинхронным
двухскоростным электродвигателем с
короткозамкнутым ротором;
б) для быстроходных пассажирских лифтов со скоростью 1,6м/с предназначенных для зданий до 25 этажей применяют электропривод по системе тиристорный регулятор напряжения (ТРН) с двухскоростным асинхронным двигателем (ТРН-АДД) типа УЛМП-25-1,6. Наличие регулируемого электропривода обеспечивает высокую плавность процессов разгона и замедления, высокую точность остановки на этаже (±20мм), отсутствие участка пониженной скорости перед остановкой. Вторая обмотка двигателя служит для получения малой скорости при ревизии;
в) для скоростных и высокоскоростных лифтов применяются электроприводы постоянного тока по системе тиристорный преобразователь-двигатель ТП-Д и переменного тока по системе преобразователь частоты — короткозамкнутый асинхронный электродвигатель ПЧ-АД.
Электропривод типа УЛЖ для пассажирских лифтов жилых зданий
Устройства
УЛЖ-10 и УЛЖ-17 предназначены для управления
лифтами со скоростью от 0,7 до 1,4м/с. В
электроприводе рис.26.24 может быть
применен асинхронный двухскоростной
электродвигатель с короткозамкнутым
ротором мощностью 5/1,25 и 8/2кВт. Управление
электроприводом осуществляется с
применением микроэлектроники.
В
электроприводе рис.26.24 может быть
применен асинхронный двухскоростной
электродвигатель с короткозамкнутым
ротором мощностью 5/1,25 и 8/2кВт. Управление
электроприводом осуществляется с
применением микроэлектроники.
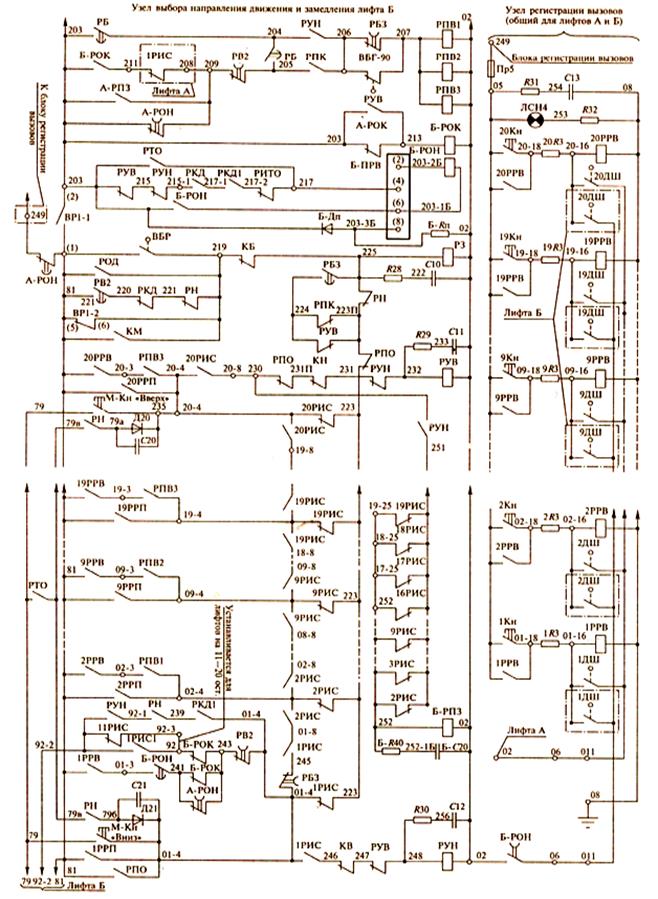
Рис.26.24. Электрическая схема электропривода лифта типа УЛЖ
Схема электропривода рис.26.24, 26.25 состоит из силовой цепи, блока управляющих реле БУР и блока управления логического БУЛ. собранного на микросхемах серии К.561. Силовая схема рис.26.24 состоит из привода механизма подъема и открывания дверей кабины.
Рис.26.25. Функциональная схема блока управления логического и выходных реле
Привод
подъема включает в себя: электродвигатель
М1; выключатель автоматический QF1;
магнитные пускатели: блокировочный
КМ5, направления вверх КМ1 и вниз КМ2,
рабочей скорости КМ3 и малой скорости
КМ4; катушка тормозного электромагнита
ВY. Электропривод дверей кабины состоит
из электродвигателя М2, выключателя
автоматического QF3,
и магнитных пускателей КМ6 и КМ7. В блок
управляющих реле входят: катушки,
вышеперечисленных магнитных пускателей
и промежуточные реле КL1…КL14. Блок
управляющих реле (БУР) осуществляет
связь между БУЛ и силовой схемой.
В блок
управляющих реле входят: катушки,
вышеперечисленных магнитных пускателей
и промежуточные реле КL1…КL14. Блок
управляющих реле (БУР) осуществляет
связь между БУЛ и силовой схемой.
Блок управления логический БУЛ рис.26.25 предназначен для логической обработки информации поступающей с кнопок, датчиков и конечных выключателей лифта, выдачи управляющих сигналов в БУР, организации парной работы и управления сигнализацией лифтов.
В состав БУЛ входят ячейки:
1. Ячейка гальванических развязок ЯГР.
2. Ячейка регистрации ЯР — служит для организации опроса кнопок приказов и вызовов, выключателей дверей шахты и для регистрации приказов и вызовов на этажах;
3. Ячейка выбора направления ЯВН;
4. Ячейка логического управления ЯЛУ — служит для реализации различных функциональных защит и блокировок, в ячейке также формируются сигналы уровня скорости и сигналы положения и форсировки тормоза;
5. Ячейка управления дверьми ЯУД — служит
для формирования сигналов на открывание
и закрывание дверей, определения
местоположения кабины лифта, а также
реализации функции узла охраны шахты;
Ячейка управления дверьми ЯУД — служит
для формирования сигналов на открывание
и закрывание дверей, определения
местоположения кабины лифта, а также
реализации функции узла охраны шахты;
6. Блок управления, в который входят: переключатели режимов работы, кнопки управления лифтом при ревизии и из машинного зала.
Работа схемы заключается в опросе и регистрации сигналов на кнопках вызова и приказов, определении местоположения кабины, выборе направления движения и скорости при различных режимах работы, а также в организации работы дверей и тормозного устройства. Рассмотрим работу БЛУ на каждом из этапов.
В
режиме «нормальная работа» происходит
циклический опрос кнопок вызовов и
приказов. В режиме «нагрузка» при
«нормальной работе» происходит
опрос кнопок приказов. Опрос производится
короткими импульсами. В случае если
была нажата кнопка, то на общую шину
поступает соответствующий данной кнопке
импульс, после чего происходит регистрация
сигнала.
Текущее местоположение кабины лифта определяется счетным способом, т.е. позиция кабины определяется совокупностью импульсов, вырабатываемых при срабатывании датчиков замедления. При движении вверх каждое срабатывание датчика замедления «вверх» вызывает приращение кода местоположения на единицу. При движении вниз и срабатывании датчика замедления «вниз» происходит убывание кода местоположения на единицу. Для корректировки местоположения используются реперные точки (датчики на этажах), а также информация от дверных контактов кабины и шахты. Местоположение кабины определяется в двоичном коде из пяти разрядов. При движении вверх счетчик работает в режиме суммирования, а при движении вниз — в режиме вычитания. Выбор направления движения осуществляется в узлах, расположенных в ячейках ЯВН и ЯЛУ. В ячейке ЯВН определяется направление движения (в импульсном виде) для режимов «нормальная работа» и «нагрузка», т.е. для движения по автоматическому циклу.
Выбор
направления для режимов «ревизия»
и «управление из машинного зала»
осуществляется в ячейке ЯЛУ, также на
ЯЛУ поступает сигнал направления
движения для всех режимов работы с
учетом различных блокировок. Таким
образом на ЯЛУ поступают три группы
сигналов направления движения: вверх
и вниз из ячейки ЯВН, вверх и вниз с
кнопочного поста «ревизии» и с
кнопок «управление из машинного
зала», находящихся в БУЛ(е).
Таким
образом на ЯЛУ поступают три группы
сигналов направления движения: вверх
и вниз из ячейки ЯВН, вверх и вниз с
кнопочного поста «ревизии» и с
кнопок «управление из машинного
зала», находящихся в БУЛ(е).
Выбор
скорости движения осуществляются в
ячейке ЯЛУ. Система управления рассчитана
на управление двухскоростным двигателем,
поэтому предусмотрены две скорости
передвижения большая и малая. В режиме
«ревизия» движение осуществляется
только на малой скорости, на остальных
режимах — на большой. Замедление с большой
скорости до малой производится в режиме
рекуперативного торможения посредством
отключения реле КL3 и включения реле
КL4, а, следовательно, отключения пускателя
КМ3 и включения пускателя КМ4. После
замедления, если лифт не находится в
зоне точной остановки, он движется на
малой скорости до ближайшего по
направлению движению этажа и останавливается
или при необходимости продолжает свое
движение, но уже на большой скорости.
Общим для всех режимов является полное
принудительное замедление у крайних
этажей.
Включение тормозного электромагнита происходит одновременно с подачей напряжения на главный электродвигатель М1 с помощью реле КL11, КL12 и замыкающих контактов пускателей КМ3 и КМ4. Реле КL12 осуществляет форсировку включения тормоза (растормаживание механического тормоза). Питание электромагнита ВУ при включении осуществляется по цепи замыкающих контактов КМ3 (КМ4), замыкающего контакта КL12 и тиристоров VS1 и VS2. Открывание тиристора VS2 осуществляется по цепи диод VД3 R1, замыкающий контакт КL11; тиристора VS1- по цепи VД2, R3, КL12.2. После включения реле КL12, через выдержку времени, достаточную для надежного включения электромагнита ВY, отключается логическим блоком и размыкает свои замыкающие контакты в цепи электромагнита и в цепи управляющего электрода тиристора VS1. В цепь электромагнита вводится дополнительное сопротивление R2. При этом напряжение на электромагните ВY снижается до уровня, равного напряжению удержания во включенном состоянии.
Открытие дверей происходит по достижению заданного адреса и нахождению кабины в зоне точной остановки. В режиме «пожарная опасность» и перегрева двигателя сигнал на открытие дверей формируется в ЯЛУ. Причем открытие дверей кабины в режиме «пожарная опасность» происходит на первом этаже и на любом этаже при поступлении сигнала перегрева.
Система обеспечивает работу лифта в здании до 25 этажей с полным собирательным управлением. Питание электропривода (рис.26.26) осуществляется от реверсивного тиристорного регулятора напряжения UZ (ТРН) при пуске и установившемся движении и от отдельного выпрямителя собранного по однофазной мостовой схеме UZ1 для питания обмотки статора при динамическом торможении.
Система обеспечивает параметрическое фазовое регулирование скорости вращения короткозамкнутого асинхронного электродвигателя. Система автоматического регулирования выполнена на однокристальной микро ЭВМ типа КР1816ВБ031, которая осуществляет непосредственное цифровое регулирование скорости вращения приводного двухскоростного асинхронного электродвигателя. Автоматическая система регулирования позволяет обеспечить высокую точность поддержания заданной скорости и остановки на уровне требуемого этажа непосредственно в заданную точку без участка пониженной скорости. Вторая обмотка двигателя включается только при ревизии.
За счет изменения программного обеспечения НКУ может использоваться для лифтов различного назначения: жилых, административных или больничных зданий.
Рис.26.26. Электрическая схема электропривода типа УЛМП-25-16
Плата-Ячейка/ УЛЖ-10 -ЯВН, ЯЛУ, ЯУД (к-т.)
Запчасти для любого ремонта
Лифтовое оборудование, применяемое во всех многоэтажных зданиях, представляет собой сложный механизм, состоящий из различных элементов. Чтобы лифты работали исправно и не доставляли неудобства людям, которые ими пользуются, необходимо своевременное проводит обслуживание и замену запчастей. В нашем каталоге вы без труда сможете подобрать запчасти для планового или авариийного ремонта любой сложности.
Поломки могут происходить по разным причинам: естественный износ, сбои в электропитании, отсутствие должного обслуживания, превышение допустимого веса и др. Вне зависимости от того, что стало причиной неисправности, в нашей компании вы сможете заказать лифтовые запчасти.
У нас более 8000 наименований товаров. Мы поставляем запчасти и лифтовое оборудование российских и зарубежных производителей
- Карачаровского завода КМЗ;
- МогилевЛифтМаш МЛЗ ;
- МЭЛ;
- Щербинского Лифтостроительного завода ЩЛЗ;
- OTIS;
- Sikor;
- ENCODER;
- Montanari;
- DOPPLER и др.
В ассортименте имеются как оригинальные, так и аналоговые запчасти высокого качества.
Также в нашей компании вы можете выгодно приобрести лифтовое оборудование. Мы можем доставить вам оборудование российских и зарубежных производителей.
Квалифицированная помощь специалистов
Для удобного поиска запчастей каталог поделен на разделы, поэтому отыскать необходимые детали обычно не составляет труда. Но если вам не удалось найти нужные позиции или требуется консультация, обратитесь за помощью к нашим сотрудникам. В компании «Заплифт» работают квалифицированные специалисты. Они могут:
- подобрать запчасти для определенного типа лифтового оборудования;
- подобрать лифты с учетом поставленных целей и бюджета;
- проконсультировать по вопросам технических характеристик или особенностей реализуемых деталей;
- ответить на вопросы, касающиеся цены, оплаты или сроков доставки.
Наш высокий профессионализм подтверждает неоднократное участие в выставках, получение наград и дипломов. Мы практикуем индивидуальный подход и готовы предложить выгодные условия сотрудничества на разовой или постоянной основе.
Другие наши преимущества
Компания «Заплифт» находится в Москве, но сфера нашей деятельности охватывает всю страну. Доставка приобретенного товара осуществляется во все регионы России. Мы успешно сотрудничаем с ведущими транспортными компаниями. Доставка до транспортной компании бесплатна, а далее по тарифам выбранного перевозчика. Так как мы сотрудничаем с несколькими ТК, вы можете подобрать наиболее удобный и выгодный для себя вариант. Сроки доставки зависят от отдаленности региона и транспортной компании.
Налаженное сотрудничество с проверенными поставщиками и производителями напрямую позволяют нам придерживаться конкурентной ценовой политики. При этом лифтовые запчасти отличаются высоким качеством и надежностью. Мы поставляем только те детали, которые прошли проверку, поскольку отлично понимаем, к каким последствиям может привести применение некачественных запчастей для лифтового оборудования. Мы заботимся о безопасности людей и следим за качеством поставляемой продукции.
Для вашего удобства мы предусмотрели разные варианты оформления заказа. Чтобы заказать детали, вы можете воспользоваться формой на сайте, отправить запрос на электронную почту или факс. Оперативно обрабатываем заявки и не задерживаем отправку заказа в транспортную компанию, чтобы сократить сроки доставки.
Компания «Заплифт» − ваш надежный поставщик лифтового оборудования и запчастей для лифтов от российских и зарубежных производителей!
Устройство, техническое обслуживание и ремонт лифтов. Манухин С.Б., Нелидов И.К. 2004 | Библиотека: книги по архитектуре и строительству
Рассмотрены устройство, принцип действия и способы регулировки механического и электрического оборудования лифтов. Предложены правила чтения электрических схем наиболее распространенных моделей лифтов с релейно-контакторными низковольтными комплектными устройствами. Освещены вопросы организации надзора, технического обслуживания, ремонта и эксплуатации лифтов и др. Для учащихся учреждений начального профессионального образования.
Введение
Глава 1. Общие сведения о лифтах
Определение лифта
Устройство и состав типового лифта
Классификация лифтов
Кинематические схемы лифтов
Основные характеристики лифтов
Особенности высокоскоростных лифтов
Глава 2. Механическое оборудование лифтов
Лифтовые лебедки
Общие сведения
Редукторы
Канатоведущие органы, блоки и контршкивы
Муфты
Тормозные устройства
Кабины лифтов
Уравновешивающие элементы
Башмаки и смазывающие аппараты
Подвески кабин и противовесов
Ловители
Ограничитель скорости
Двери шахты и кабины
Канаты
Направляющие кабины и противовеса
Упоры и буфера
Глава 3. Электрические схемы лифтов с релейно-контакторными НКУ
Общие сведения
Требования к электроприводу, электропроводке и освещению
Виды и системы управления
Наименование и назначение электрооборудования и электроаппаратов лифтов
Классификация электрических схем
Условные обозначения элементов электрических схем лифтов
Структура принципиальных электрических схем лифтов
Устройство и принцип действия приборов типа Логика И-300
Правила чтения принципиальных электрических схем лифтов
Условные обозначения, принятые при техническом описании действия принципиальных электрических схем лифтов
Принципиальная электрическая схема грузового малого лифта на две остановки грузоподъемностью 100 кг с номинальной скоростью движения кабины 0,5 м/с
Принципиальная электрическая схема грузового малого лифта на три остановки грузоподъемностью 100 кг с номинальной скоростью движения кабины 0,5 м/с
Принципиальная электрическая схема грузовых лифтов общего назначения грузоподъемностью 500, 1000, 2000 и 3200 кг с номинальной скоростью движения кабины 0,5 м/с и грузоподъемностью 5000 кг с номинальной скоростью движения кабины 0,25 м/с
Краткая характеристика системы управления лифтами
Программы работы лифтов
Принцип действия электрической схемы лифтов
Принципиальная электрическая схема пассажирского лифта для жилых зданий грузоподъемностью 320 кг с номинальной скоростью движения кабины 0,71 м/с и неподвижным полом
Краткая характеристика системы управления лифтом
Программы работы лифта
Принцип действия электрической схемы лифта
Принципиальная электрическая схема пассажирского лифта для жилых зданий грузоподъемностью 320 (500) кг с номинальной скоростью движения кабины 1,0 м/с, светящимися кнопками и одиночным управлением
Краткая характеристика системы управления лифтом
Программы работы лифта
Принцип действия электрической схемы лифта
Групповая работа пассажирских лифтов
Принцип действия электрической схемы пассажирского лифта для жилых зданий грузоподъемностью 320 (500) кг со светящимися кнопками и парным управлением
Диспетчерский контроль за работой лифтов
Глава 4. Системы управления лифтами нового поколения, выполненные с применением микроэлектроники
Особенности новых систем управления лифтами
Системы электропривода и автоматики типов УЛЖ-10 и УЛЖ-17
Программы работы лифтов с Нку типов УЛЖ-10 и УЛЖ-17
Лифты с НКУ типов УЛЖ-10 и УЛЖ-17
Блок управления релейный
Блок управления логический
Световые индикаторы
Определение местонахождения кабины
Устройства защиты и контроля
Принцип действия релейной части электрической схемы лифтов с НКУ типа УЛЖ-10
Глава 5. Организация технического обслуживания, ремонта и эксплуатации лифтов
Основные положения по организации технического обслуживания и ремонта лифтов
Техническое диагностирование и обследование лифтов
Виды ремонтов лифтов
Регистрация и ввод лифта в эксплуатацию
Порядок расследования аварий и несчастных случаев
Глава 6. Охрана труда при производстве работ на лифтах
Основные положения охраны труда при производстве работ на лифтах
Требования охраны труда при оперативном обслуживании и ремонте электроустановок напряжением до 1000 В
Порядок и условия производства работ в действующих электроустановках
Организация работ, выполняемых в порядке текущей эксплуатации согласно перечню
Отключения
Вывешивание запрещающих плакатов
Проверка отсутствия напряжения
Требования к переносным электроинструментам, светильникам, ручным электрическим машинам и разделительным трансформаторам
Защитные средства
Список литературы
Устройство, техническое обслуживание и ремонт лифтов
Учебная литература / Электроника, электрика / Механика
Основная информация:
Название: Устройство, техническое обслуживание и ремонт лифтов
Жанр: Нет
Автор: Манухин С.Б., Нелидов И.К.
Год выпуска: 2004
Формат: DJVU
Размер: 12 Mб
ISBN: 953654056787
Язык: Русский
СКАЧАТЬ Устройство, техническое обслуживание и ремонт лифтов БЕСПЛАТНО EPUB — DOC — DJVU — RTF — PDF
Описание:
Рассмотрены устройство, принцип действия и способы регулировки механического и электрического оборудования лифтов.Предложены правила чтения электрических схем наиболее распространенных моделей лифтов с релейно-контакторными низковольтными комплектными устройствами. Освещены вопросы организации надзора, технического обслуживания, ремонта и эксплуатации лифтов и др.
Для учащихся учреждений начального профессионального образования.СодержаниеВведениеГлава 1. Общие сведения о лифтах 1.1. Определение лифта 1.2. Устройство и состав типового лифта 1.3. Классификация лифтов 1.4. Кинематические схемы лифтов 1.5. Основные характеристики лифтов 1.6. Особенности высокоскоростных лифтовГлава 2. Механическое оборудование лифтов 2.1. Лифтовые лебедки 2.1.1. Общие сведения 2.1.2. Редукторы 2.1.3. Канатоведущие органы, блоки и контршкивы 2.1.4. Муфты 2.1.5. Тормозные устройства 2.2. Кабины лифтов 2.3. Уравновешивающие элементы 2.4. Башмаки и смазывающие аппараты 2.5. Подвески кабин и противовесов 2.6. Ловители 2.7. Ограничитель скорости 2.8. Двери шахты и кабины 2.9. Канаты 2.10. Направляющие кабины и противовеса 2.11. Упоры и буфераГлава 3. Электрические схемы лифтов с релейно-контакторными НКУ 3.1. Общие сведения 3.2. Требования к электроприводу, электропроводке и освещению 3.3. Виды и системы управления 3.4. Наименование и назначение электрооборудования и электроаппаратов лифтов 3.5. Классификация электрических схем 3.6. Условные обозначения элементов электрических схем лифтов 3.7. Структура принципиальных электрических схем лифтов 3.8. Устройство и принцип действия приборов типа «Логика И-300» 3.9. Правила чтения принципиальных электрических схем лифтов 3.10. Условные обозначения, принятые при техническом описании действия принципиальных электрических схем лифтов 3.11. Принципиальная электрическая схема грузового малого лифта на две остановки грузоподъемностью 100 кг с номинальной скоростью движения кабины 0,5 м/с 3.12. Принципиальная электрическая схема грузового малого лифта на три остановки грузоподъемностью 100 кг с номинальной скоростью движения кабины 0,5 м/с 3.13. Принципиальная электрическая схема грузовых лифтов общего назначения грузоподъемностью 500, 1000, 2000 и 3200 кг с номинальной скоростью движения кабины 0,5 м/с и грузоподъемностью 5000 кг с номинальной скоростью движения кабины 0,25 м/с 3.13.1. Краткая характеристика системы управления лифтами 3.13.2. Программы работы лифтов 3.13.3. Принцип действия электрической схемы лифтов 3.14. Принципиальная электрическая схема пассажирского лифта для жилых зданий грузоподъемностью 320 кг с номинальной скоростью движения кабины 0,71 м/с и неподвижным полом 3.14.1. Краткая характеристика системы управления лифтом 3.14.2. Программы работы лифта 3.14.3. Принцип действия электрической схемы лифта 3.15. Принципиальная электрическая схема пассажирского лифта для жилых зданий грузоподъемностью 320 (500) кг с номинальной скоростью движения кабины 1,0 м/с, светящимися кнопками и одиночным управлением 3.15.1. Краткая характеристика системы управления лифтом 3.15.2. Программы работы лифта 3.15.3. Принцип действия электрической схемы лифта 3.16. Групповая работа пассажирских лифтов 3.17. Принцип действия электрической схемы пассажирского лифта для жилых зданий грузоподъемностью 320 (500) кг со светящимися кнопками и парным управлением 3.18. Диспетчерский контроль за работой лифтовГлава 4. Системы управления лифтами нового поколения, выполненные с применением микроэлектроники 4.1. Особенности новых систем управления лифтами 4.2. Системы электропривода и автоматики типов УЛЖ-10 и УЛЖ-17 4.3. Программы работы лифтов с НКУ типов УЛЖ-10 иУЛЖ-17 4.4. Лифты с НКУ типов УЛЖ-10 и УЛЖ-17 4.5. Блок управления релейный 4.6. Блок управления логический 4.7. Световые индикаторы 4.8. Определение местонахождения кабины 4.9. Устройства защиты и контроля 4.10. Принцип действия релейной части электрической схемы лифтов с НКУ типа УЛЖ-10Глава 5. Организация технического обслуживания, ремонта и эксплуатации лифтов 5.1. Основные положения по организации технического обслуживания и ремонта лифтов 5.2. Техническое диагностирование и обследование лифтов 5.3. Виды ремонтов лифтов 5.4. Регистрация и ввод лифта в эксплуатацию 5.5. Порядок расследования аварий и несчастных случаевГлава 6. Охрана труда при производстве работ на лифтах 6.1. Основные положения охраны труда при производстве работ на лифтах 6.2. Требования охраны труда при оперативном обслуживании и ремонте электроустановок напряжением до 1000 В 6.3. Порядок и условия производства работ в действующих электроустановках 6.4. Организация работ, выполняемых в порядке текущей эксплуатации согласно перечню 6.5. Отключения 6.6. Вывешивание запрещающих плакатов 6.7. Проверка отсутствия напряжения 6.8. Требования к переносным электроинструментам, светильникам, ручным электрическим машинам и разделительным трансформаторам 6.9. Защитные средстваСписок литературы
Универсальный имитатор лифта LiftSim (стенд УЛЖ-10, УПЛ-10, ПУ-3, ПКЛ-32 и др.)Текущая версия 2.5.8.3 от 25 марта 2020 годаПервая цифра (2) — версия приставки к ПКВторая цифра (5) — версия прошивки Третья цифра (8) — версия программного обеспечения для ПК Четвертая цифра (3) — увеличивается на 1 при исправлении ошибок и незначительных изменениях в ПО для ПК Список изменений от версии 2.4.7 до версии 2.5.8.3
Скачать руководство пользователя Скачать программное обеспечение LiftSim v8.3 Скачать прошивку LiftSim v5 для бутлоадера Скачать прошивку LiftSim v5 для программатора
Обновление ПО на компьютере Обновление прошивки прибора Доработка жгута для ПУ/МПУ Доработка жгута для ПКЛ-32 Краткий обзор устройстваИмитатор лифта LiftSim представляет собой программно-аппаратное средство, предназначенное для имитации работы датчиков и электропривода лифта. Таким образом, LiftSim позволяет производить диагностику, ремонт и наладку в лабораторных условиях электронных плат и станций управления лифтом. LiftSim выполнен как приставка к ПК, поэтому для его работы требуется пк, ноутбук или нетбук с установленным программным обеспечением LiftSim.
Устройство изготавливается только на заказ. Сроки изготовления 3 — 4 месяца с момента подачи заявки. Стоимость изготовления узнавайте по телефону или пишите на электронную почту Характеристики:
Обновление ПО на компьютереНовое программное обеспечение полностью совместимо со всеми выпущенными приборами. Для перехода на новую версию удалите старое программное обеспечение, скачайте по ссылке выше и установите новое программное обеспечение. Для новой версии ПО не требуется установка и настройка каких-либо драйверов. Старый драйвер LibUsb можно удалить! Обновление прошивки прибораОбновите прошивку прибора так как это описано в руководстве пользователя. Для этого скачайте прошивку для бутлоадера по ссылке выше. Или обновите прошивку прибора, используя любой универсальный программатор, например, Фитон. Для этого скачайте прошивку прибора для программатора. Затем раскрутите прибор, извлеките микроконтроллер и перепрошейте его программатором. Доработка жгута для ПУ/МПУДля использования LiftSim с платами ПУ-3/МПУ для регулируемого привода необходимо немного переделать жгут! (Все новые приборы от 2016 года уже идут с данной доработкой) Для этого на жгуте для ПУ-1/ПУ-3/МПУ замените 8-ми контактный клеммник X12 на два клеммника: один 6-ти контактный и один 2-х контактный клеммник. Далее раскрутите коробку на жгуте рядом с клеммником X12 и припайте ещё один 2-х контактный клеммник. Теперь если вам требуется проверить ПУ/МПУ для нерегулируемого привода, то к X12 подключайте 6-ти контактный клеммник и первый 2-х контактный клеммник. Для ПУ/МПУ для регулируемого привода подключайте к X12 6-ти контактный клеммник и второй 2-х контактный клеммник. Более подробно про использование LiftSim с платами ПУ-3/МПУ для регулируемого привода написано в новой версии руководства пользователя Доработка жгута для плат ПУ-3/МПУ для регулируемого привода Доработка жгута для плат МПУ с число-импульсным датчиком замедления Доработка жгута для ПКЛ-32Для использования LiftSim с платами ПКЛ-32 для регулируемого привода необходимо немного модернизировать жгут! (Все новые приборы от конца июля 2018 года уже идут с данной доработкой). Модернизация жгута для платы ПКЛ-32 выполняется по схеме ниже. В жгут необходимо добавить разъём XS5 тип DB-15F. Все новые провода для разъёма XS5 подпаиваются параллельно к проводам на разъёме ПКЛ32-X1. Список изменений от версии 2.4.7 до версии 2.5.8
Список изменений от версии 2.1.5 до версии 2.4.7
Список изменений от версии 1.0.4 до версии 2.1.5
|
| № | Ариткул | Наименование детали |
| 1 | УКЛ, УЛ, УЭЛ | Ремонт платы МПУ-1 (объёмный монтаж) |
| 2 | УКЛ, УЛ, УЭЛ | Ремонт платы МПУ-1 (поверхностный монтаж) |
| 3 | УКЛ, УЛ, УЭЛ | Ремонт платы ЦПУ (объемный монтаж) |
| 4 | УКЛ, УЛ, УЭЛ | Ремонт платы ЦПУ (поверхностный монтаж) |
| 5 | УКЛ, УЛ, УЭЛ | Ремонт платы ПК (поверхностный монтаж) |
| 6 | УКЛ, УЛ, УЭЛ | Ремонт платы ПП (объемный монтаж) |
| 7 | УКЛ, УЛ, УЭЛ | Ремонт платы ПП (поверхностный монтаж) |
| 8 | УКЛ, УЛ, УЭЛ | Ремонт платы ПТ (объемный монтаж) |
| 9 | УКЛ, УЛ, УЭЛ | Ремонт платы ПТ-2 (поверхностный монтаж) |
| 10 | УКЛ, УЛ, УЭЛ | Ремонт платы ПКФ (объемный монтаж) |
| 11 | УКЛ, УЛ, УЭЛ | Ремонт платы ПКФ (поверхностный монтаж) |
| 12 | УКЛ, УЛ, УЭЛ | Ремонт платы ПУ-1 |
| 13 | УКЛ, УЛ, УЭЛ | Ремонт платы ПУ-3 (объёмный монтаж) |
| 14 | УКЛ, УЛ, УЭЛ | Ремонт платы ПУ-3 (поверхностный монтаж) |
| 15 | УКЛ, УЛ, УЭЛ | Ремонт платы ПТЗ |
| 16 | УКЛ, УЛ, УЭЛ | Ремонт платы ПТЗ-3 (объёмный монтаж) |
| 17 | УКЛ, УЛ, УЭЛ | Ремонт платы ПТЗ-4 (поверхностный монтаж) |
| 18 | УКЛ, УЛ, УЭЛ | Ремонт платы ПСК / за 1 канал |
| 19 | УКЛ, УЛ, УЭЛ | Ремонт платы ПСК-3/ за 1 канал |
| 20 | УКЛ, УЛ, УЭЛ | Ремонт платы ПУТ |
| 21 | УКЛ, УЛ, УЭЛ | Ремонт платы ПУТ-3 |
| 22 | УКЛ, УЛ, УЭЛ | Ремонт платы ПКТС |
| 23 | УКЛ, УЛ, УЭЛ | Ремонт платы ПКТС-2 (объёмный монтаж) |
| 24 | УКЛ, УЛ, УЭЛ | Ремонт платы ПКТС-3 (поверхностный монтаж) |
| 25 | СТАНЦИЯ УЛ | Программное обеспечение (поставка) |
| 26 | СТАНЦИЯ УЛ ПУ-3 | Программное обеспечение (поставка) |
| 27 | СТАНЦИЯ УКЛ | Программное обеспечение (поставка) |
| 28 | СТАНЦИЯ УЭЛ | Программное обеспечение (поставка) |
| 29 | ШУЛ, ШУЛМ | Ремонт платы ПКЛ-17, Ремонт платы ПКЛ-32 (объёмный монтаж) |
| 30 | ШУЛ, ШУЛМ | Ремонт платы ПКЛ-32-06 (поверхностный монтаж) |
| 31 | ШУЛ, ШУЛМ | Ремонт платы тормоза ПТ |
| 32 | ШУЛ, ШУЛМ | Ремонт платы ПЗМП |
| 33 | ШУЛ, ШУЛМ | Ремонт платы ПУ-3 SM, ПУ-4 SM |
| 34 | УЛЖ-10,17 | Ремонт платы ЯВН УЛЖ |
| 35 | УЛЖ-10,17 | Ремонт платы ЯЛУ УЛЖ |
| 36 | УЛЖ-10,17 | Ремонт платы ЯУД УЛЖ |
| 37 | УЛЖ-10,17 | Ремонт платы МЯУ (поверхностный монтаж) |
| 38 | УЛЖ-10,17 | Ремонт платы ЯГР-10 УЛЖ |
| 39 | УЛЖ-10,17 | Ремонт платы ЯГР-17 УЛЖ |
| 40 | УЛЖ-10,17 | Ремонт платы ЯР-10 УЛЖ |
| 41 | УЛЖ-10,17 | Ремонт платы ЯР-17 УЛЖ |
| 42 | УЛЖ-10,17 | Ремонт платы ЯЛУ-17 УЛЖ |
| 43 | УЛЖ-10,17 | Ремонт платы ЯУД-17 УЛЖ |
| 44 | УЛЖ-10,17 | Ремонт САУ (полная касетница с платами) |
| 45 | УЛЖ-10,17 | РЕМОНТ КОРЗИНЫ САУ |
| 46 | Шлейф для УЛЖ-17 | Ремонт шлейфа Широкого |
| 47 | Шлейф для УЛЖ-17 | Ремонта шлейфа Узкого |
| 48 | СТАНИЦИЯ УМЛ | РЕМОНТ ПЛАТЫ ЯУ |
| 49 | СТАНЦИЯ УМЛ | РЕМОНТ ПЛАТЫ ЯЦП |
| 50 | ШУЛ-1НП | Ремонт платы контроллера (селектор) |
| 51 | ЧП БУАД | Ремонт Частотного преобразователя привода дверей БУАД |
| 52 | ЧП БУАД | Сложный ремонт Частотного преобразователя привода дверей БУАД |
| 53 | ЧП МАГНУС-21 | Ремонт Частотного преобразователя привода дверей МАГНУС |
| 54 | ЧП МАГНУС-21 | Сложный ремонт Частотного преобразователя привода дверей МАГНУС |
| 55 | ЧП УПДКЛ 2.0 | Ремонт Частотного преобразователя привода дверей УПДКЛ |
| 56 | ЧП УПДКЛ 2.0 | Сложный ремонт Частотного преобразователя привода дверей УПДКЛ |
| 57 | ШК 6000 | Ремонт платы приказного аппарата контроллер СКБИ 758725.129 |
| 58 | ШК 6000 | Ремонт платы тормоза ШК 6000 ПТ-5А |
| 59 | ШК 6000 | Ремонт платы этажного контроллера ШК6000 СКБИ 758725.133С1 |
| 60 | ШК 6000 | Ремонт платы центрального контроллера ШК 6000 |
| Otis | ||
| 61 | GAA21305WS1 | Ремонт главного привода Частотный преобразователь в сборе GAA21305WS1 Otis |
| 62 | KCA21310AAN1 | Ремонт главного привода Частотный преобразователь ReGen OVFR02B-403 KCA21310AAN1 Otis |
| 63 | GAA21344C10 | Ремонт главного привода Частотный преобразователь OVF20-CR 15 кВт GAA21344C10 Otis |
| 64 | GАA21343C10 | Ремонт главного привода Частотный преобразователь OVF20 9 кВт GАA21343C10 Otis |
| 65 | FAA24350BK1 | Ремонт Частотного преобразователя привода дверей . Блок привода дверей AT-120 FAA24350BK1 Otis |
| 66 | GBA 24350Bh2 | Ремонт Частотного преобразователя привода дверей . Блок привода дверей DCSS5-E . GBA 24350 Bh2 Otis |
| 67 | GBA26800LB20 | Ремонт платы BCB GBA26800LB20 Otis |
| 68 | GAA26800ME20 | Ремонт платы BCB-II GAA26800ME20 Otis |
| 69 | GCA26800KG4 | Ремонт платы DCB_II GCA26800KG4 Otis |
| 70 | FAA25402AF2 | Ремонт платы FAA25402AF2 Otis |
| 71 | ADA26800AML1 | Ремонт платы GECB Computing core ADA26800AML1 Otis |
| 72 | GBA26800LC3 | Ремонт платы GECB-EN GBA26800LC3 Otis |
| 73 | GAA26800MD2 | Ремонт платы GECB-II GAA26800MD2 Otis |
| 74 | GBA21230F1 | Ремонт платы LB-II 2 (MCS-300) GBA21230F1 Otis |
| 75 | GGA21240D1 | Ремонт платы LCB-II 2 GGA21240D1 Otis |
| 76 | GCA26800KF10 | Ремонт платы MCB-III GCA26800KF10 Otis |
| 77 | MEAF35C | Ремонт платы MEAF35C Otis |
| 78 | MEAF17E | Ремонт платы NG-12 MEAF17E Otis |
| 79 | GAA26800LT1 | Ремонт платы PBX_REC GAA26800LT1 Otis |
| 80 | GAA26800KP1 | Ремонт платы PDB_II GAA26800KP1 Otis |
| 81 | DBA26800J1 | Ремонт платы RS32 DBA26800J1 Otis |
| 82 | GAA26803A1 | Ремонт платы RS4R GAA26803A1 Otis |
| 83 | DAA26803NNP1 | Ремонт платы RSFF DAA26803NNP1 Otis |
| 84 | GEA26800AL1 | Ремонт платы SOM-II GEA26800AL1 Otis |
| 85 | GEA26800BA40 | Ремонт платы TCB для VF-MRL (GCA26800BA40) GEA26800BA40 Otis |
| 86 | GBA26810A2 | Ремонт платы WWPDB GBA26810A2 Otis |
| 87 | J-Box | Ремонт платы клеммной коробки «J-Box» DP1 Otis |
| 88 | GAA26800LS1 | Ремонт платы контроллера PBX_INV GAA26800LS1 Otis |
| 89 | GDA26800KA1 | Ремонт платы контроллера TCBC GDA26800KA1 Otis |
| 90 | GCA26800KV3 | Ремонт платы контроля движения MCB3Х GCA26800KV3 Otis |
| 91 | 9709C2 | Ремонт платы контроля скорости 9709C2 Otis |
| 92 | C9708BM2 | Ремонт платы процессора C9708BM2 Otis |
| 93 | GCA26800BB1 | Ремонт платы сервисной панели SPB GCA26800BB1 Otis |
| 94 | GBA26800KB1 | Ремонт платы сервисной панели SPBC GBA26800KB1 Otis |
| 95 | GBA26800KM10 | Ремонт платы сервисной панели SPBC-II GBA26800KM10 Otis |
| 96 | GCA26800KX10 | Ремонт платы сервисной панели SPBC-III GCA26800KX10 Otis |
| 97 | FDA23600V1 | Ремонт платы указателя этажного HPI13 FDA23600V1 Otis |
| 98 | AEA26800AKT2 | Ремонт платы частотного преобразователя ReGen2/OVF20 AEA26800AKT2 Otis |
| 99 | GAA26800AR2 | Ремонт платы эскалатора ECB GAA26800AR2 Otis |
| 100 | GAA21750AK3 | Ремонт Сервис Тул Service tool (поддержка GECB-II, без ограничения кол-ва включений) GAA21750AK3 Otis |
| 101 | FAA25100AA2 | Ремонт оборудования табло панели приказов CPI18B FAA25100AA2 Otis |
| KONE | ||
| 102 | KM769900G01 | Ремонт главного привода Частотный преобразователь V3F16 14A KM769900G01 Kone |
| 103 | KM782999G01 | Ремонт главного привода Частотный преобразователь V3F25 40A KM782999G01 Kone |
| 104 | KDL16L | Ремонт главного привода Частотный преобразователь KDL16L |
| 105 | KM606810G01 | Ремонт частотного преобразователя привода дверей . блок привода дверей AMD2 KM606810G01 Kone |
| 106 | KM280783 | Ремонт блока питания MPS5-230/24 KM280783 Kone |
| 107 | KM603810G01 | Ремонт блока управления дверьми AMD DRIVE 1.5 KM603810G01 Kone |
| 108 | KM803942G01 | Ремонт блока управления тормозом KM803942G01 Kone |
| 109 | KM806880G02 | Ремонт платы F2KHDM HLI DOT MATRIX AMBER KM806880G02 Kone |
| 110 | KM713110G04 | Ремонт платы LCE CAN 512K SRAM 512K FL KM713110G04 Kone |
| 111 | KM802890G11 | Ремонт платы LCE CCBN2 KM802890G11 Kone |
| 112 | KM713720G11 | Ремонт платы LCE COB KM713720G11 Kone |
| 113 | KM713720G71 | Ремонт платы LCE COB KM713720G71 Kone |
| 114 | KM773380G04 | Ремонт платы LCE CPU40 KM773380G04 Kone |
| 115 | KM802870G01 | Ремонт платы LCE GTWO KM802870G01 Kone |
| 116 | KM713130G01 | Ремонт платы LCE KNX KM713130G01 Kone |
| 117 | KM397452G01 | Ремонт платы MCC-85/EXP3 TMS200/600 KM397452G01 Kone |
| 118 | KM763600G01 | Ремонт платы LCE LOB-CB KM763600G01 Kone |
| 119 | KM763600G02 | Ремонт платы LCE LOB-CB KM763600G02 Kone |
| 120 | KM713150G11 | Ремонт платы LCE OPT KM713150G11 Kone |
| 121 | KM713930G01 | Ремонт платы LCE V3F16es KM713930G01 Kone |
| 122 | KM713160G01 | Ремонт платы LCEADO KM713160G01 Kone |
| 123 | KM713160G01 | Ремонт платы LCEADO KM713160G01 Kone |
| 124 | KM713160G02 | Ремонт платы LCEADO KM713160G02 Kone |
| 125 | KM713110G02 | Ремонт платы LCECAN ASSEMBLY KM713110G02 Kone |
| 126 | KM713730G11 | Ремонт платы LCECEB COP EXTENSION BOARD KM713730G11 Kone |
| 127 | KM713700G11 | Ремонт платы LCEFCB KM713700G11 Kone |
| 128 | KM713780G11 | Ремонт платы LCEFOB KM713780G11 Kone |
| 129 | KM781380G01 | Ремонт платы V3F25/V3F18 HCBN KM781380G01 Kone |
| 130 | KM781380G02 | Ремонт платы V3F25/V3F18 HCBN KM781380G02 Kone |
| 131 | KM725800G01 | Ремонт платы V3F25/V3F18 KM725800G01 Kone |
| 132 | KM261580 | Ремонт платы аварийного освещения KM261580 Kone |
| 133 | KM832339G01 | Ремонт платы дисплея панели приказов KM832339G01 Kone |
| 134 | KM856280G1 | Ремонт платы индикатор F2KKON EML-KNX KM856280G1 Kone |
| 135 | KM763640G01/ KM763643H03 | Ремонт платы контроллера LCECPU NC, KM763640G01/KM763643H03 KONE |
| 136 | KM602810G02 | Ремонт платы привода дверей AMD KM602810G02 Kone |
| 137 | KM772860G01 | Ремонт платы приказной панели F2KC7S COP 7 SEGMENT KM772860G01 Kone |
| 138 | KM772850G02 | Ремонт платы приказной панели F2KMUL KM772850G02 Kone |
| 139 | KM898498 | Ремонт платы связи KM898498 Kone |
| 140 | KM713100G01 | Ремонт платы управления LCECPU Monospace REV 1.3 KM713100G01 Kone |
| 141 | KM713700G01 | Ремонт платы этажная KM713700G01 Kone |
| 142 | KM735630G01 | Ремонт оборудования Табло KM735630G01 Kone |
| 143 | KM50017283G01 | Ремонт табло индикации AVDMAT ASSEMBLY KM50017283G01 Kone |
| 144 | KM713550G01 | Ремонт табло индикации KM713550G01 Kone |
| 145 | HJ16-1 60V | Ремонт оборудования тормоз в сборе HJ16-1 60V Kone |
| 146 | KM650824G01 | Ремонт оборудования тормоз лебедки Monospace KM650824G01 Kone |
| ThyssenKrupp Elevator | ||
| 147 | 65 410 64 010 | Ремонт блока питания MN7 65 410 64 010 ThyssenKrupp |
| 148 | 65 410 003 700 | Ремонт блока питания MN9-65 410 003 700/SNT251 ThyssenKrupp |
| 149 | 65 100 009 220 | Ремонт платы LMS1 6510 000 9220 ThyssenKrupp |
| 150 | 65 100 009 221 | Ремонт платы MC2-STANDARD 6510 000 9221 ThyssenKrupp |
| 151 | 65000007732 | Ремонт платы Mh5-DZS 65000007732 ThyssenKrupp |
| 152 | 65 000 007 730 | Ремонт платы Mh5-GT 6500 000 7730 ThyssenKrupp |
| 153 | 65 000 007 733 | Ремонт платы Mh5-SI 6500 000 7733 ThyssenKrupp |
| 154 | 65000007731 | Ремонт платы Mh5-STUW 65000007731 ThyssenKrupp |
| 155 | 65 106 71 76 0 | Ремонт платы MP-TCM 65 106 71 76 0 ThyssenKrupp |
| 156 | 65 100 009 237 | Ремонт платы MS4 6510 000 9237 ThyssenKrupp |
| 157 | 6510079680 | Ремонт платы MV6 6510079680 ThyssenKrupp |
| 158 | 65 230 002 903 | Ремонт платы групповой работы MG3 6523 0002903 ThyssenKrupp |
| 159 | 6510082680 | Ремонт платы мониторинга MM 6510082680 ThyssenKrupp |
| 160 | 65 190 31 66 0 | Ремонт платы связи TF1 65 190 31 66 0 ThyssenKrupp |
| 161 | 65 190 009 202 | Ремонт платы связи TF2 6519 000 9202 ThyssenKrupp |
| 162 | 65 100 009 224 | Ремонт платы управления MC3 6510 000 9224 ThyssenKrupp |
| 163 | 04022466200002296 | Ремонт платы частотного преобразователя FSR2 04022466200002296 ThyssenKrup |
| 164 | 66 200 001 602 | Ремонт платы частотного преобразователя KMB 6620 000 1602 ThyssenKrupp |
| 165 | 66 200 009 278 | Ремонт платы частотного преобразователя KMB2 6620 000 9278 ThyssenKrupp |
| 166 | 66 200 009 279 | Ремонт платы частотного преобразователя KMB2 6620 000 9279 ThyssenKrupp |
| 167 | 66 200 006 435 | Ремонт платы частотного преобразователя TMI2 6620 000 6435 ThyssenKrupp |
| 168 | 65100009216 | Ремонт платы этажная MS2 65100009216 ThyssenKrupp |
| 169 | 6568079660 | Ремонт табло MA3 6568079660 ThyssenKrupp |
| Schindler | ||
| 170 | 59410933 | Ремонт главного привода . частотного преобразователя DR-VAB33 (VF33BR) 59410933 Schindler |
| 171 | 594408 | Ремонт платы ASIXA 34.QF 594408 Schindler |
| 172 | ID.452310 | Ремонт платы BFNO 20 ID.452310 Schindler |
| 173 | ID.591712 | Ремонт платы EBBIO 1.QC ID.591712 Schindler |
| 174 | ID.591640 | Ремонт платы GCIOB 360.QB ID.591640 Schindler |
| 175 | ID.635999 | Ремонт платы GEC 16.QC ID.635999 Schindler |
| 176 | ID.590749 | Ремонт платы ICOM 1.NB ID.590749 Schindler |
| 177 | ID.445712 | Ремонт платы KFEB 14.QE ID.445712 Schindler |
| 178 | ID.834810 | Ремонт платы PE 380 ID.834810 Schindler |
| 179 | ID.NR. 591792 | Ремонт платы SHCU 1.QC ID.NR. 591792 Schindler |
| 180 | 594303 | Ремонт платы SMICE 61.Q 594303 (594154) Schindler |
| 181 | ID.459942 | Ремонт платы VWSG 16.QA ID.459942 Schindler |
| 182 | ID.590747 | Ремонт платы привода дверей BA 1485.QA ID.590747 Schindler |
| 183 | ID.590861 | Ремонт платы привода дверей GW 2.MB ID.590861 Schindler |
| 184 | ID.59400350 | Ремонт платы частотного преобразователя GCE 16.MA ID.59400350 Schindler |
| 185 | ID.59410512 | Ремонт платы частотного преобразователя VARIOCON 22.QH ID.59410512 Schindler |
| 186 | ID.150042 | Ремонт вызывной панели (Terminal with a numeric keypad) Miconic 10 Z Line II ID.150042 Schindler |
| 187 | ID.590416 | Ремонт указателя направления движения SRh2.QA ID.590416 Schindler |
| Mitsubishi | ||
| 188 | YE500B327G01 | Ремонт блок питания YE500B327G01 Mitsubishi |
| 189 | KCA-910A | Ремонт платы KCA-910A Mitsubish |
| 190 | KCR-75 9C | Ремонт платы KCR-75 9C Mitsubishi |
| 191 | KCZ-620 | Ремонт платы KCZ-620 для частотного преобразователя, шкаф управления GPS-II YX302B560A DPMC 94V Mitsubishi |
| 192 | LHS-400A | Ремонт платы панели приказов LHS-400A Mitsubishi |
| 193 | LHS-410A | Ремонт платы панели приказов LHS-410A Mitsubishi |
| 194 | P203722B000G01 | Ремонт платы питания P203722B000G01 Mitsubishi |
| LiftMaterial | ||
| 195 | HSG | Ремонт блока управления системой аварийной доводки кабины до этажа HSG LiftMaterial |
| 196 | FPM-2 | Ремонт платы управления панелью приказов на кабине лифта FPM-2 LiftMaterial |
| 197 | FSM-2 | Ремонт платы управления постом ревизии на кабине лифта FSM-2 LiftMaterial |
| 198 | EAZ-256 | Ремонт указатель направления движения EAZ-256 LiftMaterial |
| Прочие производители | ||
| 199 | MPS-150 220/24 | Ремонт блока питания MPS-150 220/24 MacPuarsa |
| 200 | MBAS8P | Ремонт платы MICROBASIC MBAS8P SIN MICRO MacPuarsa |
| 201 | AMB-1 | Ремонт платы расширения приказов AMB-1 MacPuarsa |
| 202 | 3215.15.7400 | Ремонт блока привода дверей Hydra PLUS ECO 3215.15.7400 (903510G01S) Selcom |
| 203 | 3201.03.0262 | Ремонт блока привода дверей Hydra PLUS MIDI/SUPRA 3201.03.0262 Selcom |
| 204 | VCI.VF4ACI0EE | Ремонт блока привода дверей, левое открывание VCI.VF4ACI0EE Fermator |
| 205 | VCI.VF4ACD0EE | Ремонт блока привода дверей, правое открывание VCI.VF4ACD0EE Fermator |
| 206 | 6 60-01-80003 | Ремонт платы Lisa LBM9 6 60-01-80003 Kleeman |
| 207 | 6515010 | Ремонт платы MEh4 6515010 Hidral |
| 208 | 6516010 | Ремонт платы MEh4/AD 6516010 Hidral |
| 209 | 6511100 | Ремонт платы NEh3 6511100 Hidral |
| 210 | 6514300 | Ремонт платы NEh3 для гидравлического блокиратора 6514300 Hidral |
| 211 | 6513300 | Ремонт платы NEh3 для электрического блокиратора 6513300 Hidral |
| 212 | 6661110 | Ремонт платы кабины CAB/MCH MAP99 V1.1 6661110 Hidral |
| 213 | 6661120 | Ремонт платы кабины MAP07/CAB-QH V2.0 6661120 Hidral |
| 214 | 6515010 | Ремонт платы управления (4 остановки, замки 48VAC) MEh4 PCB 6515010 Hidral |
| 215 | PL 102a | Ремонт платы PL 102a TE100 SKG |
| 216 | PL 10a | Ремонт платы PL 10a TE101 SKG |
| 217 | AS-3 | Ремонт платы управления AS-3 TE150.1 SKG |
| 218 | KBK-7 | Ремонт платы коммутации KBK-7 Arkel |
| 219 | KBK-9 | Ремонт платы коммутации KBK-9 Arkel |
| 220 | ARL-500 | Ремонт платы управления ARL-500 Arkel |
| 221 | PG-F3 | Ремонт платы интерфейса PG-F3 для работы с энкодерами Hiperface, EnDat для инверторов серии L1000A 323403 Yaskawa |
| 222 | FST V2.6 | Ремонт платы управления FST V2.6 NewLift |
| 223 | FST-2XT | Ремонт платы управления FST-2XT NewLift |
| 224 | PL 620 | Ремонт платы управления PL 620 BKG |
| 225 | SL20B | Ремонт платы управления SL20B CMM |
| 226 | LRV-1 Delta | Ремонт платы управления блоком гидроклапанов LRV-1 Delta Controller |
| 227 | 7.5кВт AVy2075-KBL-BR4 | Частотный преобразователь AVy2075-KBL-BR4 7.5кВт GEFRAN SIEI ARTDrive |
| 228 | Schneider Electric | Ремонт главного привода Преобразователь частоты Altivar ATV71 15кВт ATV71LD33N4Z |
| 229 | Schneider Electric | Ремонт главного привода Преобразователь частоты Altivar ATV71L 11 кВт ATV71LD27N4Z |
| 230 | Schneider Electric | Ремонт главного привода Преобразователь частоты Altivar ATV71L 7,5 кВт |
| 231 | Danfoss | Ремонт главного привода Частотный преобразователь 11 кВт FC302P11KT5E20h2 Danfoss |
| 232 | Danfoss | Ремонт главного привода Частотный преобразователь 5 кВт FC302P5K5T5E20h2 Danfoss |
| 233 | KEB | Ремонт главного привода Частотный преобразователь 15кВт 16.F5.A1G-36PA KEB |
| 234 | FUJI | Ремонт главного привода Частотный преобразователь 45кВт/91A FRN45 LM1S-4EA FUJI |
| 235 | FUJI | Ремонт главного привода Частотный преобразователь 4кВт FRN400 LM1S-415 FUJI |
| 236 | Doppler | Ремонт главного привода Частотный преобразователь TD 3200-250002D EMERSON Doppler |
| 237 | Prisma | Ремонт главного привода Частотный преобразователь Jaguar 2 кольца 09200016_02 Prisma |
| 238 | Prisma | Ремонт главного привода Частотный преобразователь Jaguar, 1 кольцо 09200016_01 Prisma |
| 239 | SIGMA | Ремонт платы приказного аппарата Sigma PCB DCL-244 |
| 240 | SJEC | Monarch Control | Ремонт платы главного контроллера MCTC-MCB-B-M39 Ver_A 4708 |
| 241 | SEC | Doppler | Ремонт платы SEC Electronics PCB E-Type CAR-PLUS |
| 242 | CENTA | Ремонт грузовзвешивающего устройство ГВУ CENTA CNT 800 |
| 243 | ABB | Ремонт главного привода Частотный преобразователь ACSM1 — U04AL — 016 A 7,5 кВт |
| 244 | ABB | Ремонт главного привода Частотный преобразователь ACS355-03E-23A1-4 11кВт |
| 245 | ABB | Ремонт главного привода Частотный преобразователь ACSM-1 11 кВт |
| 246 | ABB | Ремонт главного привода Частотный преобразователь ACSM-1 15 кВт |
| 247 | ABB | Ремонт частотного преобразователя ABB U 600 X . ACS800 01 0025 5 . |
| 248 | EMOTRON | Ремонт главного привода Частотного преобразователя VFX 48 — 031 15 кВт |
| 249 | EMOTRON | Ремонт главного привода Частотного преобразователя VFX 48 — 037 18,5 кВт |
| 250 | EMOTRON | Ремонт главного привода Частотного преобразователя VFX 48 — 046 22 кВт |
| 251 | EMOTRON | Ремонт платы сопряжения частоты PS-YL006 |
| 252 | WITTUR | Ремонт Частотного преобразователя привода дверей WIITUR ECO DRIVE |
EPA подтверждает важные изменения в правилах качества воды Миннесоты — the pink report news
Федеральное агентство по охране окружающей среды на этой неделе одобрило кардинальные изменения в правилах качества воды Миннесоты.
Агентство по контролю за загрязнением Миннесоты работало над изменениями в течение десяти лет и официально предложило изменения прошлой зимой. Но одобрение федерального правительства заставило активистов-экологов пошатнуться.
Миннесота имеет набор правил, применимых к промышленности, очистным сооружениям и всем, кто сбрасывает значительные количества сточных вод в ручей или озеро.Правила разработаны для защиты качества воды и обычно устанавливают числовые ограничения на такие параметры, как соли, pH, кальций, магний, хлорид и другие элементы. Новые правила устраняют многие числовые ограничения и вместо этого требуют повествовательного описания, которое обычно описывает общие условия, желаемые в водоеме.
Паула Маккаби, директор по защите интересов Water Legacy, некоммерческой организации, занимающейся вопросами охраны окружающей среды, сказала, что не понимает одобрения. Организация отправила подробные комментарии в MPCA, когда она разрабатывала правила, и в EPA, когда она рассматривала изменения правил.«Я просто считаю, что это не только опасно для Миннесоты, но и является нарушением Закона о чистой воде», — сказала она. «И почему ни один из этих фактов не имел значения для EPA, я не могу понять».
Продолжение статьи после объявления
В конце августа, всего через несколько недель после публикации новых правил в Государственном реестре, U.S. Steel подала заявку на пересмотренное разрешение для своего гигантского таконитового рудника Миннтак. Компания хочет, чтобы MPCA не только сократил количественные ограничения, но и устранил требования к мониторингу многих загрязнителей.Эти химические вещества перемещаются из переполненного пруда сточных вод Миннтака в Дарк-Ривер, Тимбер-Крик, Литл-Сэнди-Лейк и Адмирал-Лейк, а в конечном итоге — в Верхнее озеро.
Паула Маккаби
Маккаби и другие ожидали, что Агентство по охране окружающей среды не одобрит новый подход штата, который сделает рассмотрение заявки на разрешение спорным. Но пока правила остаются в силе. «Миннесотцы рассчитывают на то, что у государства есть правила, которые обеспечивают их соблюдение, а суды их поддерживают», — говорит Маккаби. «Но в случае с У.С. Стил, мы учимся тому, что эту цепочку можно легко разорвать: просто избавьтесь от цифр. Без ограничений нет ни закона, ни защиты, ни принуждения. Это довольно мрачный день для Миннесоты.
В своем ответе на общественные комментарии MPCA заявило в марте, что необходимо отменить числовые стандарты, потому что они «не подходят» для обозначенного использования и основаны на «устаревших» научных данных. Отрасли промышленности предъявляют самые разные требования к забираемой воде: очевидно, что промывка гравия и производство щепы имеют разные потребности.Точно так же качество воды, предпочтительной для орошения, зависит от урожая, почвы и других факторов. MPCA заявило, что нация в целом движется к более индивидуализированным и зависящим от места ограничениям, поскольку новые исследования показывают сложности биохимических взаимодействий.
Агентству по охране окружающей среды потребовалось два месяца, чтобы рассмотреть план штата, и в конечном итоге было установлено, что штат соблюдает все применимые правила. Используя тот же язык и рассуждения, которые использовались Миннесотой при объяснении нового подхода, EPA пришло к выводу, что новые правила будут адекватно защищать различные виды использования озер и рек Миннесоты.
Племенные правительства также резко критиковали план во время его разработки. В беспрецедентном совместном заявлении [PDF] правительства 11 племен заявили, что новые правила «могут значительно ухудшить здоровье вод Миннесоты». Этот ущерб будет тем более серьезным для племенных граждан штата, которые полагаются на дикий рис, рыбу и другие охраняемые договором ресурсы для пропитания по более высоким ставкам, чем остальное население, и которые уже подвергаются разрозненным воздействиям из-за широко распространенное загрязнение воды.”
При разработке новых правил MPCA сосредоточил свое внимание на промышленном и сельскохозяйственном использовании воды. Не найдя исследований безопасных уровней многих загрязнителей для дикой природы, агентство выбрало крупный рогатый скот в качестве суррогата дикой природы, например, чтобы установить стандарт сульфатов.
Но, как указывается в племенном документе, установление таких ограничений может защитить коров, но не защитит дикий рис или водных насекомых. «Допущение увеличения содержания хлоридов и других солей в верхних … водах может убить там водных насекомых, что также убьет рыбу, поедающую этих насекомых», — говорится в заявлении.«Практически полное отсутствие конкретных данных о дикой природе в отчетах MPCA исключает любую уверенность в предположении агентства».
Один гражданский комментатор, биолог Стефани Дигби, поставила под сомнение научные данные, на которых MPCA основывает свои новые правила. «Стандарты, основанные на том, может ли крупный рогатый скот выжить, не могут быть применены ко всей пищевой цепочке, если следовать какой-либо науке. Это полная противоположность любой науке », — написала она.
Продолжение статьи после объявления
В своем одобрительном документе [PDF] EPA заявило, что MPCA продемонстрировало, что описательные стандарты будут защищать водную жизнь, и пообещало, что исследования помогут агентствам установить будущие стандарты.«EPA ожидает, что использование описательных стандартов приведет к выдаче разрешений с более строгими ограничениями, чем те, которые основаны на теперь удаленных числовых критериях, до такой степени, что развивающаяся наука указывает, что гораздо более строгие ограничения могут защитить водную жизнь».
И племена, и экологические группы жалуются, что при пересмотре правил игнорируется давняя проблема загрязнения ртутью. Сульфат в воде способствует высвобождению ртути в отложения и помогает преобразовать ее в метилртуть, нейротоксическую форму, которая накапливается в рыбе и в людях, которые ее едят.Согласно недавнему исследованию, у десяти процентов новорожденных, живущих на северном берегу озера Верхнее в Миннесоте, в крови был избыток ртути. Отвечая на комментарии, EPA заявило, что ртуть является отдельным загрязнителем, и правила для сульфатов не должны включать опасения по поводу ртути.
Еще одно важное изменение заключается в том, что стандарты применяются не в точке сброса, как в настоящее время, а в точке ниже по течению, где кто-то другой забирает воду для крупномасштабного орошения или промышленного использования. Племенные группы решительно выступили против этой идеи.«Идея о том, что мониторинг соответствия будет или должен происходить на промышленном или сельскохозяйственном водозаборе, который может находиться в нескольких милях ниже по течению от сброса, нарушающего стандарты качества воды Миннесоты…, не обеспечивает защиту существующих видов использования воды между одним крупным промышленным или сельскохозяйственным сбросом. », И следующий ниже по течению, отмечается в совместном заявлении для MPCA.
Помимо многих конкретных опасений по поводу изменений, племена жалуются, что государственные и федеральные агентства не учли должным образом их взгляды.За годы работы над этим проектом племена регулярно давали комментарии, которые редко приводили к изменениям.
В конце концов, MPCA заявляет, что его «варианты, которые могут отличаться от комментариев Tribal, остаются научно обоснованными и разумными. Предлагаемое правило представляет собой разумный путь к достижению цели защиты качества воды для промышленных и сельскохозяйственных целей и использования дикой природы ».
Правительства 11 племен ответили: «Похоже, что MPCA перепутала количество контактов с качеством.Это бессмысленная консультация ». И они настаивают на том, чтобы в интересах экологической справедливости: «Никакие изменения каких-либо стандартов качества воды не должны происходить без анализа воздействия на договорные ресурсы».
Теперь правила распространяются на все воды Миннесоты. Пока еще рано говорить о том, что будет дальше, но судебный иск кажется вероятным. Между тем, агентство объявило во вторник, что оно начинает работу над очередным набором поправок к правилам качества воды.
(PDF) Независимая от транскрипции экспрессия PKM ζ в передней поясной коре головного мозга способствует хронически сохраняющейся нейропатической боли
острая и хроническая боль.Nat Rev Neurosci 2016;
17: 485–496.
15. Кан С.Дж., Квак С., Ли Дж., Сим С.Е., Шим Дж., Чой Т.,
Коллингридж Г.Л., Чжуо М. и Каанг Б.К. Двунаправленная модуляция гипералгезии
через специфический контроль возбуждающей и ингибирующей нейрональной активности в ACC. Мол
Мозг 2015; 8: 81.
16. Ли XY, Ko HG, Chen T, Descalzi G, Koga K, Wang H,
Kim SS, Shang Y, Kwak C, Park SW, Shim J, Lee K,
Collingridge GL , Каанг Б.К. и Чжо М.Снижение гиперчувствительности к нейропатической боли
путем ингибирования PKMzeta
в передней поясной коре головного мозга. Наука 2010;
330: 1400–1404.
17. Ли XY, Ко Х.Г., Чен Т., Коллингридж Г.Л., Каанг Б.К. и
Чжуо М. Стирание связанной с травмой кортикальной синаптической потенции —
как новое лечение хронической боли. J Mol Med 2011;
89: 847–855.
18. Радванска К., Медведев Н.И., Перейра Г.С., Энгманн О,
Тиде Н., Мораес МФД, Виллерс А., Ирвин EE,
Маунганидзе Н.С., Пыза Е.М., Рис L, Шимань
nska M,
nska M,
nska M,
Lipinski M, Kaczmarek L, Stewart MG, Giese KP.
Механизм формирования долговременной памяти при нарушении усиления синап-
тиков. Proc Natl Acad Sci USA
2011; 108: 18471–18475.
19. Вадаккан К.И., Цзя Ю.Х. и Чжуо М. Поведенческая модель нейропатической боли
, вызванной перевязкой общего пери-
неального нерва у мышей. J Pain 2005; 6: 747–756.
20. Ко Х. Г., Чой Дж. Х., Пак Ди, Кан С Дж. Дж., Лим С. С., Сим С. Е.,
Шим Дж, Ким Джи, Ким С., Чой Т.Х., Йе С, Ли Дж., Пак П.,
Ким С., До Дж, Пак Дж., Ислам М.А., Ким Х.Дж., Терк CW,
Коллингридж ГЛ, Чжуо М. и Каанг Б.К.Быстрый оборот
кортикального NCAM1 регулирует синаптическую реорганизацию
после повреждения периферического нерва. Cell Rep 2018; 22: 748–759.
21. Хван К.Д., Бак М.С., Ким С.Дж., Ри С., Ли Ю.С. Восстановление
синаптической пластичности и памяти на мышах модели
болезни Альцгеймера путем ингибирования PKR. Mol Brain 2017;
10: 57
22. Yu NK, Kim HF, Shim J, Kim S, Kim DW, Kwak C, Sim
SE, Choi JH, Ahn S, Yoo J, Choi SL, Jang DJ, Lim
CS, Ли Ю.С., Кан Си, Чхве С.И. и Каанг Б.К.Транс-
дуктивный ядерный / ядрышковый белок, mLLP, регулирует нейро-
-нальный морфогенез и синаптическую передачу. Sci Rep
2016; 6: 22892.
23. Чо Дж, Ю Н-К, Чой Дж-Х, Сим С.-Э, Кан С-Дж. Дж., Квак С.,
Ли С. В., Ким Дж-И, Чой Д. И., Ким В. Н. и Каанг Б. К..
Множественные репрессивные механизмы в гиппокампе
во время формирования памяти. Наука 2015; 350: 82–87.
24. Канг С.Дж., Лю М.Г., Чен Т., Ко Х-Г, Пэк Джи-Си, Ли Х-Р,
Ли К., Коллингридж Г.Л., Каанг Б.К. и Чжуо М.
Пластичность метаботропных рецепторов глутамата
длительная депрессия передней поясной коры
после ампутации. J Neurosci 2012; 32: 11318–11329.
25. Kelly MT, Crary JF, Sacktor TC. Регулирование синтеза протеина
киназы Mzeta множеством киназ при длительной потенциации
. J Neurosci 2007; 27: 3439–3444.
26. Shang Y, Wang H, Mercaldo V, Li X, Chen T и
Zhuo M. Белок умственной отсталости Fragile X составляет
, необходимый для химически индуцированной долговременной потенциации
гиппокампа у взрослых мышей.J Neurochem 2009;
111: 635–646.
27. Эрнандес А.И., Блаче Н., Крари Дж. Ф., Серрано П. А., Лейтгес М.,
Либиен Дж. М., Вайнштейн Г., Черапанов А. и Сактор Т.К.
Синтез протеинкиназы М дзета из мРНК головного мозга
, кодирующей независимый дзета-каталитический домен протеинкиназы С
. Последствия для молекулярного механизма.
J Biol Chem 2003; 278: 40305–40316.
28. Palmisano M, Caputi FF, Mercatelli D, Romualdi P и
Candeletti S.Изменения динорфинергической системы в тикостриатной схеме cor-
нейропатических мышей подтверждают его роль в отрицательном аффективном компоненте боли. Genes Brain
Behav 2018; e12467.
29. Линг Д.С., Бенардо Л.С., Сактор ТК. Протеинкиназа Mzeta
усиливает возбуждающую синаптическую передачу за счет увеличения
количества активных постсинаптических рецепторов AMPA.
Гиппокамп 2006; 16: 443–452.
30. Xu H, Wu LJ, Wang H, Zhang X, Vadakkan KI, Kim SS,
Steenland HW и Zhuo M.Пресинаптическое и постсинаптическое
нарастания нейропатической боли в передней поясной извилине
коры головного мозга. J Neurosci 2008; 28: 7445–7453.
31. Нишимуне А., Исаак Дж. Т., Мольнар Е., Ноэль Дж., Нэш С. Р.,
Тагая М., Коллингридж Г. Л., Наканиши С., Хенли Дж. М..
Связывание NSF с GluR2 регулирует синаптическую передачу.
Neuron 1998; 21: 87–97.
32. Toyoda H, Zhao M-G, Ulzh €
ofer B, Wu L-J, Xu H,
Seeburg PH, Sprengel R, Kuner R and Zhuo M.Роли
субъединицы рецептора AMPA GluA1, но не GluA2 в
синаптической потенциации и активации ERK в передней части поясной коры головного мозга. Mol Pain 2009; 5: 46.
8 Молекулярная боль
Приказ Совета 1399/1979
% PDF-1.4 % 1 0 объект > эндобдж 2 0 obj > поток
ba pt II — Университет Махарши Даянанда Сарасвати, Аджмер, Раджастан
УНИВЕРСИТЕТ МАХАРШИ ДАЯНАНДА САРАСВАТИ, АДЖМЕРСКАЯ УЧЕБНАЯ ЗАПИСЬ ЭКЗАМЕНА И КУРСЫ ФАКУЛЬТЕТА ИСКУССТВ И СОЦИАЛЬНЫХ НАУК B.Часть — II экзамен — 2011 »Ë. ∞. ¬Ê≈¸U — II ¬⁄UˡÊÊ-wÆvv (10 + 2 + 3 Pattern) Издание — ПУБЛИКАЦИИ ALKA, 2010 г. Пурани Манди, Аджмер УВЕДОМЛЕНИЕ 1. Постановления и поправки если есть какие-либо правила экзамена на факультетах искусств. Изобразительное искусство. Социальные науки, наука, коммерция, исследования в области управления, образования и права, а также pt , изданные университетом , содержатся в отдельном буклете.Студентам, при необходимости, рекомендуется обратиться к нему. 2. Изменения в Уставе / Правилах / Положениях / Учебной программе и Книгах могут время от времени вноситься путем внесения поправок или переделок, и кандидат должен исключать pt в части Университета определяет иным образом соблюдать любые изменения, относящиеся к годам, которые он не завершил на момент изменения. 3. В каждом документе 10 вопросов будут заданы среди пяти блоков, по два вопроса в каждой. Кандидаты должны ответить на пять вопросов, взяв хотя бы по одному вопросу от каждого блока.4. Программа представлена на обоих языках — хинди и английском. Если есть какие-либо расхождения, английская версия будет аутентичной. 5. Список учебников / Рекомендуемые книги / Справочные книги, одобренные различными B.O.S. печатаются только вместе с английской версией. 6. Решение Ученого совета окончательно. ‚ØŸÊ 1- дык] йфырдык] лект фокку] фоКку] окф.кТ;] izcU / к в / ;; у ф’к {кк, оа фоф / к ладк; dh ijh {kkvksa dks ‘kkflr djus okys v /; kns’k, oa lecfU / kr la’kks / ku; fn dksbZ gks tks fo’ofo | ky; } kjk Lohdkj fd; s x; s gSa i`Fkd iqfLrdk esa ladfyr gSA Nk = dks lykg nh tkrh gS fd vko ‘; d gksus ij bu v /; kns’kksa dks ns [kasA 2- le; & le; ij la’kks / ku; k iqufuekZ.k dj ifjfu; eksa @ fu; eksa @ fofu; eksa @ ikB ~; Øekas o iqLrdksa esa ifjorZu fd; k tk ldrk gS] rFkk fdlh Hkh ifjorZu dks Nk = dks ekuuk gksxk fo c’ofrso | fd; us vU; Fkk izdkj ls mudks NwV u nh gks vkSj Nk = us ml ifjorZu ds iwoZ o «kZ ikB ~; Øe dks iwjk u fd; k gksA 3- izR; sd iz’u & i = esa ikap; wful iza ls ‘u gksxs] çR; sd; wfuV ls nks & nks ç’u gksaxsA Nk = dks çR; sd; wfuV essa ls, d ç’u dk p; u djrs gq, dqy ikap ç’uksa ds mRrjNsuk 4- gksik ; Øe fgUnh, oa vaxzsth nksuks Hkk «kkvksa esa fn; k gqvk gSA; fn dksbZ folaxfr izrhr gks rks vaxzsth ikB ~; Øe dks gh izekf.kd ekuk tk; sxkA 5-fofHkUu v / ;; u cksMksZa} kjk Loh — r ikB ~; iqLrdksa @ laLrqr iqLrdksa @ lanHkZ iqLrdksa dh lwph dsoy vaxzsth ikB ~; Øe esa miyC / k gSA {. ÁfllÊ ¬Á⁄U · mÊ⁄UÊ Á ‹ÿapple ªÿapple ÁŸáʸÿ„ UË • ÁãÃ◊ „UÊapple ¥ apple– © MAHARSHI DAYANAND SARASWATI UNIVERSITY, AJMER Опубликовано и напечатано ALKA PUBLICATIONS, AJMER. для Махарши Даянанда Сарасвати Университет , Аджмер
показать все
подходов к реализации многобитового цифрового приемника с использованием быстрого Фурье Преобразование
Defense Science Journal, том 63, выпуск 2, март 2013 г., стр.198-203
DOI: 10.144029 / dsj.63.4264
© 2013, DESIDOC
Поступила 17 сентября 2012 г., доработана 8 февраля 2013 г., опубликована онлайн 23 марта 2013 г.
Подходы к реализации многобитового цифрового приемника с использованием быстрого Фурье Преобразовать
Абхиджит С. Кулкарни, Виджеш П., Хемант В. Паранджапе и К. Махешвара Редди *
Defense Avionics Research Establishment, Бангалор-560 093, Индия
* Электронная почта: kmaheswarreddy @ rediffmail.ком
В этой статье сравниваются различные схемы обработки сигналов цифрового приемника применительно к существующим системам ESM / RWR. Схемы включают в себя архитектуру на основе быстрого преобразования Фурье (БПФ), КИХ-фильтра и смешанную архитектуру. Также обсуждается использование многофазных фильтров БПФ и БИХ. Обсуждаются технические характеристики и требования к обработке сигналов современного приемника цифровой радиоэлектронной борьбы (РЭБ). Приведены процедуры проектирования и архитектуры для всех схем.Также обсуждаются компромиссы, связанные с выбором различных параметров для этих схем. Схемы цифрового приемника моделируются и анализируются для различных показателей, таких как точность измерения параметров, возможность обработки импульсов, возможность разделения частот, количество умножителей, необходимых для реализации и т. Д. Анализ проводится для цифрового приемника с полосой пропускания 500 МГц и предполагает 8-битный АЦП. в передней части. Результаты, полученные для сравнения, обсуждаются в статье. Ограниченное моделирование показывает, что схема БПФ с перекрытием является лучшим подходом для обработки цифрового приемника..
Ключевые слова: Электронная война, средства радиоэлектронной поддержки, низкая вероятность перехвата
f Частота
f с Частота дискретизации
N Число точек БПФ
h (n) Коэффициент фильтрации Twiddle-фактор
I Синфазная составляющая сигнала
Q Квадратурная фазовая составляющая
f проход Граничная частота полосы пропускания
f остановка Граничная частота полосы задерживания
R проход Пульсация в полосе пропускания в дБ
8 стоп Затухание в полосе заграждения в дБ
Приемники средств электронной поддержки (ESM) используются для обнаружения присутствия вражеской платформы в перехваченном электромагнитном сценарии до того, как она успеет обнаружить защищаемую платформу. 7 .Современный сценарий РЭБ состоит из нескольких различных типов радаров, использующих сложные формы сигналов. Последние тенденции в радарной технологии направлены на использование большей полосы пропускания, малой мощности и большей продолжительности рабочего цикла. Следовательно, обнаружение перекрывающихся импульсов и сигналов с низкой вероятностью перехвата (LPI) в присутствии шума — новые требования, возникающие при проектировании приемника ESM.
Системы ESM, из-за их фундаментальной роли в обнаружении ряда различных типов радаров, являются широкополосными системами.Микроволновый спектр все чаще используется в коммерческих целях. Еще одна проблема — обнаружение полезных радиолокационных сигналов при наличии помех. Наличие высокоскоростных АЦП в диапазоне ГГц сделало возможной прямую выборку сигналов в диапазоне ПЧ. Появление программируемых вентильных матриц (FPGA) с высокой плотностью и быстродействием с выделенными ресурсами для выполнения операций цифровой обработки сигналов (DSP) позволило реализовать методы ESM, работающие в реальном времени.В современных приложениях радиоэлектронной борьбы (EW) желательные характеристики приемника EW включают широкий диапазон частот, высокую чувствительность и динамический диапазон, высокую вероятность перехвата, одновременное обнаружение сигнала, точные измерения частоты и т. Д. Архитектура приемника с цифровым разделением каналов обеспечивает большинство из них. характеристики. Базовая блок-схема цифрового приемника РЭБ представлена на рис. 1.
Основными компонентами являются высокоскоростной АЦП и высокоскоростной ПЛИС высокой плотности.Компонент АЦП выполняет быструю дискретизацию и цифровое преобразование входящего ПЧ-сигнала и передает цифровые данные на ПЛИС, где реализованы такие алгоритмы ЦОС, как БПФ, обнаружение и точное измерение параметров. Полученный сигнал оцифровывается и обрабатывается для формирования слова, называемого словом дескриптора импульса (PDW), которое содержит основные параметры импульса, такие как время прихода, радиочастота, ширина импульса, амплитуда импульса, угол прихода импульса. Ожидается, что для каждого входящего импульса приемник EW будет генерировать PDW.Сгенерированные PDW далее анализируются процессором EW для сортировки и устранения чередования последовательностей импульсов и выявления угроз 4 .Основными преимуществами цифровой обработки перед аналоговой обработкой являются программируемость, воспроизводимость, гибкость и стабильность. Поскольку алгоритмы цифровой обработки реализованы в виде компьютерных программ или встроенного программного обеспечения, очень легко изменить любой параметр (например, усиление фильтра, ширину полосы пропускания фильтра и т. Д.) По сравнению с аналоговой обработкой. Цифровая обработка сигналов более надежна, поскольку в схемах цифровой обработки отсутствует температурный дрейф, изменение коэффициента усиления и сдвиг уровня постоянного тока.
Важно отметить разницу между радаром и приемником РЭБ. Радары — это активная система, передающая РЧ и обрабатывающая отраженный сигнал; следовательно, требования к полосе пропускания для обработки будут составлять всего несколько МГц. Приемники EW — это пассивные приемники, которые вслепую ищут интересующие полосы частот, которые будут порядка ГГц. Следовательно, для высокой вероятности перехвата мгновенная ширина полосы должна быть высокой, обычно порядка ГГц. Кроме того, поскольку радар заинтересован в собственном возврате, он может использовать схему обнаружения согласованного фильтра, чтобы получить выигрыш от обработки.Приемник EW не знает входящих сигналов, он не может использовать обнаружение согласованного фильтра, но должен использовать набор фильтров, покрывающий всю полосу пропускания для обнаружения.
ДПФ — это математическая процедура, используемая для определения содержания гармоник или частоты дискретной последовательности сигналов 2 . ДПФ соответствует последовательности отсчетов, которые равномерно разнесены по частоте преобразования Фурье сигнала. Это 8 важно в цифровой области, поскольку это взаимно однозначное отображение временной последовательности x (n) на другую последовательность X (k), представляющую комплексную частоту 8 .
Алгоритм быстрого преобразования Фурье используется для эффективного вычисления ДПФ. Это достигается за счет использования периодичности и симметрии комплексной последовательности 11 . Существует множество вариантов исходного алгоритма БПФ, но все они основаны на фундаментальном принципе разложения вычислений ДПФ на последовательность последовательно уменьшающихся ДПФ.
Фильтрация — важная и необходимая операция в любом приемнике РЭБ. Фильтр — это система, которая в конечном итоге определенным образом изменяет спектральный состав входных сигналов.Общие цели фильтрации включают улучшение качества сигнала, извлечение информации о сигнале и разделение компонентов сигнала. Фильтрация может выполняться в аналоговой или цифровой области. КИХ-фильтры обычно используются в реализациях DSP по разным причинам. Что наиболее важно, КИХ-фильтры являются линейными фазовыми фильтрами, поэтому фазовые искажения устраняются. Применительно к широкополосному приемнику РЭБ это важно, поскольку во многих случаях расчет угла прихода (АОА) зависит от разности фаз между несколькими каналами.Использование КИХ-фильтров желательно еще и потому, что они всегда гарантированно стабильны из-за отсутствия полюсов в передаточной функции. КИХ-фильтры являются фильтрами с прямой связью и не используют обратную связь, такую как фильтры с бесконечной импульсной характеристикой (БИХ), которые могут создавать нестабильность, особенно с учетом ошибок квантования коэффициентов 8 .
Для измерения параметров используется отфильтрованный сигнал. Огибающая сигнала вычисляется с использованием синфазной и квадратурной фазовых составляющих отфильтрованного сигнала.Также частота вычисляется с использованием разности фаз между последовательными отсчетами. Время прихода рассчитывается с использованием точного момента нарастания импульса от огибающей. PW рассчитывается с использованием точных моментов нарастания и спада импульса. Амплитуда импульса рассчитывается с использованием огибающей импульса.
Выбор 256-точечного БПФ в качестве базового БПФ для цифрового приемника осуществляется с учетом разрешения TOA и разрешения по частоте, реализации в реальном времени. Таблица 1. показывает разрешение по времени прихода (TOA) и разрешение по частоте для различного количества точек БПФ.
Таблица 1. Разрешение по времени прихода и разрешение по частоте для разного количества точек БПФ.
3.1 Архитектуры на основе БПФ
Архитектуры на основе БПФ используют алгоритм быстрого преобразования Фурье для фильтрации сигналов и обнаружения сигналов. Заданное N точечное БПФ делит входную полосу частот на N фильтров fs / N. Форма фильтра определяется используемым окном во временной области. Измерение параметров выполняется на выходах БПФ.Выходы БПФ сложны. Следовательно, огибающая импульса может быть рассчитана с использованием комплексных величин, а мгновенная частота может быть рассчитана с использованием измерения дифференциальной фазы. Архитектуры на основе БПФ обычно могут быть конвейерными и могут обрабатывать очень высокую плотность импульсов. Выбор количества точек БПФ определяет разрешение по частоте и разрешение TOA. Также для точного измерения PW посредством интерполяции требуется, чтобы временные кадры перекрывались для более точной оценки TOA без ухудшения разрешения по частоте.Но для этого требуется дополнительная память и множители, чем в случае БПФ без перекрытия.3.1.1 Архитектуры БПФ без перекрытия
В этой схеме входные данные делятся на кадры по N выборок перед выполнением N-точечного БПФ. На выходе последовательных БПФ выполняется обнаружение сигнала.
3.1.2 Архитектура БПФ с перекрытием
В этой схеме входные данные перекрываются перед выполнением БПФ. Мы рассматриваем случай перекрытия данных 128 и 192 точек.Перекрытие данных увеличивает скорость вывода БПФ и, следовательно, увеличивает разрешение по времени без ухудшения разрешения по частоте. Сложность реализации линейно растет с увеличением количества перекрытий.
Процедура разработки: Для частоты дискретизации 1280 МГц 256-точечное БПФ дает разрешение по частоте 5 МГц и разрешение по времени 200 нс. Подходящая функция окна во временной области длиной 256 выбирается для уменьшения боковых лепестков в частотной области. Оконная функция определяет форму фильтра БПФ.Ширина основного лепестка фильтра увеличена за счет использования окна. Окна Кайзера и окна Блэкмана обычно используются из-за их нижних боковых выступов 3 .
Параметры окна Кайзера:
Длина = 256
Бета-значение = 7
Относительное затухание боковых лепестков = -51,2 дБ
Из-за увеличения ширины главного лепестка разрешение по частоте не равно полосе пропускания фильтра. В зависимости от формы окна необходимо отбросить два-три соседних фильтра БПФ к пику при обнаружении пиков в спектре БПФ.
3.2 Архитектуры на основе КИХ-фильтров
3.2.1 Архитектура на основе каскадных КИХ-фильтров
Архитектура каскадных КИХ-фильтров использует набор КИХ-фильтров поэтапно для достижения желаемого разрешения по частоте. Данная входная полоса разделена на M широких фильтров. Каждый фильтр M дополнительно подразделяется на N узких фильтров. Входной сигнал умножается на центральную частоту каждого фильтра, чтобы довести его до центра фильтра. Пороговое значение применяется к каждому выходу фильтра для обнаружения.
Расчетные параметры КИХ для широкого фильтра
f с / = 1350 МГц,
f проход = 37,5 МГц,
f стоп = 75 МГц,
Вт проход = 6,
Вт стоп = 10.
Расчетные параметры КИХ для узкого фильтра
f с / = 168,75 МГц,
f проход = 12,5 МГц,
f стоп = 19,5 МГц,
Вт проход = 1,
W упор = 10.
В этом примере каждый широкий фильтр 75 МГц разделен на 3 фильтра по 25 МГц каждый.
3.3 Смешанные архитектуры
3.3.1 Полифазное БПФ
Полифазная фильтрация — это операция многоскоростной обработки сигнала, которая приводит к эффективной структуре фильтрации для аппаратной реализации. Многофазная фильтрация распараллеливает операцию фильтрации за счет прореживания коэффициентов фильтра h (n). Это позволяет снизить внутреннюю скорость обработки с более короткими фильтрами, что дает более высокую эффективную скорость выполнения 8 .Многофазные фильтры также могут использоваться для разделения частотного спектра, создавая таким образом набор фильтров. На рис. 2 показана реализация многофазного БПФ.
Процедура разработки: Входящие N выборок данных распределяются по M ветвям, и выполняется M точечное БПФ. Количество точек M выбирается в зависимости от требуемого разрешения по времени. Прореживание приводит к пропускам в частотной области. Следовательно, каждый фильтр БПФ должен быть расширен, чтобы покрыть пробелы. Это делается путем применения окна временной области к входящим данным.M принимается равным 64, а длина окна — 512.
Дальнейшее обсуждение формирования однородных банков фильтров с использованием DFT можно найти в Crochiere 6 , et al.
3.3.2 Архитектура фильтра БПФ + КИХ
В этой схеме обнаружение импульсов основано на 256-точечном БПФ без перекрытия. На основе обнаружения в БПФ можно настроить до четырех КИХ-фильтров на основе четырех максимальных пиков в БПФ. Измерение параметров выполняется с использованием дециматорных фильтров 4 I и 4 Q.Прототипы фильтров I и Q разработаны и сохранены. На основе обнаруженной частоты БПФ фильтры I и Q дециматора настраиваются на частоту сигнала, а выборки сигнала фильтруются, а также прореживаются. Эта схема требует внешней или внутренней памяти для хранения необработанных выборок АЦП. Все импульсные измерения производятся на выходах фильтров. Эта схема дает лучшее разрешение во временной области, чем простое БПФ, поскольку фильтр работает выборка за выборкой.
Параметр проектирования КИХ: для этой схемы конструкция КИХ-фильтра основана на ширине фильтра БПФ.Для полосы пропускания БПФ 5 МГц фильтр КИХ разработан для односторонней полосы пропускания 5 МГц.
f с / = 1350 МГц,
f проход = 5 МГц,>
fstop = 11 МГц,
R проход = 3 дБ,>
R стоп = 40 дБ.
Можно показать, что многофазный фильтр с конечной импульсной характеристикой (КИХ) и скользящее (оконное и перекрывающееся) БПФ являются вариациями одного и того же алгоритма 5 .
3.3.3 Метод фильтрации на основе БПФ + БИХ
Эта схема аналогична схеме фильтра БПФ + КИХ, за исключением того факта, что вместо фильтров дециматора КИХ в схеме используются фильтры БИХ.Для того же набора спецификаций БИХ-фильтр может быть реализован с меньшим количеством коэффициентов, чем КИХ-фильтр. В приложениях, где можно допустить нелинейную фазовую характеристику без снижения производительности, БИХ-фильтры являются хорошими кандидатами.
Параметр конструкции БИХ-фильтра:
Выбранный БИХ-фильтр является эллиптическим.
f с / = 1350 МГц,
f проход = 5 МГц,>
f стоп = 11 МГц,
R проход = 1 дБ,>
R стоп = 40 дБ.
Прореживатель БИХ-фильтр реализован по предложенной схеме 10 . На рис. 3. показана схема для разделов 3.3.2 и 3.3.3.
Цель сравнения — найти оптимальную схему обработки цифрового приемника. Все схемы сравниваются по таким показателям производительности, как количество умножителей, точность параметров, частотное разделение, ухудшение чувствительности для импульса 100 нс и плотность импульсов. Все схемы предназначены для реализации на ПЛИС.Во всех схемах обнаружение основано на обработке быстрого преобразования Фурье. Все фильтры БПФ проверяются на соответствие порогу. В каждом кадре БПФ обнаруживаются максимум четыре пика.
Таблица 2. Сравнение подходов к цифровым приемникам
Смоделированы схемы цифровых приемников. Аддитивный белый гауссовский шум используется для имитации шума. Предполагается, что частота дискретизации составляет 1350 МГц. Последовательности импульсов из 500 импульсов с шириной 400 нс и PRI 1 мкс на частотах от 756 МГц до 762 МГц (с шагом 100 кГц) передаются модели, и сгенерированные PDW анализируются.Это сделано, чтобы охарактеризовать измерение параметра по одному полному фильтру БПФ. Среднеквадратичные значения точности частоты, ширины импульса и амплитуды импульса рассчитываются на основе значений PDW, созданных моделью. Точность интервала повторения импульсов (PRI) рассчитывается исходя из точности TOA. Амплитуда последовательности импульсов была принята равной -20 дБмВт. Также были подтверждены несколько случаев PW 100 и 200 нс при -10 дБмВт.
Также генерируются импульсы с минимальной шириной импульса (PW) 100 нс и PRI 5 мкс. Частота варьируется от 750 МГц до 1250 МГц.Время нарастания и спада импульса порядка 25 нс использовалось при генерации импульсов путем прохождения через соответствующий КИХ-фильтр. Моделирование точности измерения параметров выполняется при ОСШ около 10 дБ. Плотность импульса рассчитывается для длительности импульса 2 мкс. Моделирование настроено на обработку четырех таких перекрывающихся импульсов. Следовательно, плотность входных импульсов составляет 2 миллиона импульсов в секунду (MPPS). Количество множителей рассчитывается в соответствии с числами умножения, встречающимися в полной модели. Это число можно оптимизировать, используя различные методы аппаратной реализации.Предполагается, что минимальный PW вдвое превышает время кадра БПФ, что является требованием для интерполяции во временной области. Ухудшение чувствительности (для меньшей ширины импульса) рассчитывается как мощность, превышающая чувствительность, при которой схема способна измерять все параметры с менее чем 20% пропущенных импульсов.
5.1 Результаты
Схема 1: БПФ без перекрытия использует минимум ресурсов по сравнению с другими схемами и обеспечивает хорошее частотное разделение и плотность импульсов. Но он не может обеспечить хорошее временное разрешение.Минимальный обрабатываемый PW составляет 379 нс. Это может быть хорошей схемой в приложениях, где допустимо немного ухудшенное временное разрешение.Схема 2 и 3: БПФ с перекрытием улучшает временное разрешение по сравнению со случаем без перекрытия за счет большего количества множителей. Метод перекрытия по 192 точкам может обрабатывать импульс 100 нс без ухудшения чувствительности
Схема 4: Метод каскадного КИХ-фильтра требует для реализации большого количества множителей. Это дает хорошее разрешение во временной области, но плохое частотное разделение.Если используются более узкие фильтры, порядок фильтров увеличивается, увеличивая количество множителей.
Схема 5: Полифазное 64-точечное БПФ обеспечивает хорошее временное разрешение, но имеет плохое частотное разделение из-за большой ширины фильтра БПФ 64-точечного БПФ. Схема многофазного БПФ дает отличные формы фильтра благодаря КИХ-фильтру, присутствующему перед БПФ.
Схема 6: Эта схема дает меньшую плотность импульсов из-за наличия настраиваемых FIR-фильтров. Но он дает хорошие измерения во временной области на выходах КИХ-фильтра.Эта схема требует дополнительного хранилища для необработанных выборок, обрабатываемых КИХ-фильтром. Минимальный PW, который может быть обработан, составляет 379 нс из-за 256-точечного БПФ без перекрытия.
Схема 7: Эта схема дает те же результаты, что и схема 6, но с большим количеством множителей. Это может дать более высокую плотность импульсов из-за меньшего количества умножителей, необходимых для БИХ-фильтра. Но коэффициенты БИХ не могут быть сгенерированы на лету, и, следовательно, эта схема требует, чтобы коэффициенты для всех БИХ-фильтров сохранялись.
Проведенное ограниченное тестирование моделей показывает, что подход с перекрытием БПФ (перекрытие на 192) представляет собой хорошую схему обработки цифрового приемника для работы ESM / RWR. Он проще в конструкции, способен работать с высокой плотностью импульсов и соответствует параметрам точности. Он может обрабатывать импульс 100 нс без ухудшения чувствительности. Также доступно большое количество алгоритмов БПФ, оптимизированных для реализации в реальном времени. Для спецификаций, предусмотренных для цифрового приемника, схемы на основе КИХ-фильтра и схемы со смешанной архитектурой предлагают свои собственные преимущества, но требуют большого количества умножителей для достижения желаемых характеристик времени и частоты.Авторы считают, что многофазное БПФ может быть хорошей схемой обработки для будущих цифровых приемников. Дальнейшая работа в этой области может заключаться в изучении БИХ-фильтров на предмет их пригодности для работы с цифровыми приемниками.
Авторы выражают благодарность П.М. Саундару Раджану, директору DARE, за его постоянную поддержку этой работы. Авторы также хотели бы поблагодарить г-на М.А.Виджайкумара, Sc ‘F’, за его руководство и поддержку. Авторы также благодарны техническому персоналу DARE за поддержку в выполнении этой работы.
1. Цуй, Джеймс Б.Я. Цифровые методы для широкополосных приемников. Эд 2-й. Норвуд, Массачусетс: Дом Artech, 2001
2. Лион, Ричард. Понимание цифровой обработки сигналов. Pearson Education, 2004.
.3. Харрис, Фредрик Дж. Об использовании окон для гармонического анализа с дискретным преобразованием Фурье. Proc. IEEE , 1978, 66 (1), 51-83.
4. Цуй, Джеймс Б.Ю. Специальные темы проектирования цифровых широкополосных приемников. Норвуд, Массачусетс: Artech House, 2010
5. Харрис, Фредрик Дж. О взаимосвязи между многоскоростными многофазными КИХ-фильтрами и оконной обработкой БПФ с перекрытием. Proc. IEEE , 1978, 66 (1), 485-88.
6. Крошьер, Рональд и Рабинер, Лоуренс. Многоскоростная цифровая обработка сигналов. Prentice Hall Inc, Нью-Джерси
7. Нери, Филиппо. Введение в системы радиоэлектронной защиты.Издание 2-е, SciTech Publishing Inc, 2006
8. Букса, Питер. Параметрируемый канальный широкополосный цифровой приемник для высокой скорости обновления. Государственный университет Райта, 2003. (магистерская диссертация)
9. Проектная документация цифрового приемника DARE, версия 1.0, DARE 2010
10. Пархи, Кешаб К. и Мессершмитт, Дэвид Г. Конвейерное чередование и параллелизм в рекурсивных цифровых фильтрах — Часть 1: Конвейерная обработка с использованием разбросанного просмотра вперед и декомпозиции. IEEE Trans.Акустика, Речевой сигнал, Тр. , 1989, 37 (7). 1099-117.
11. Кули, Дж. И Тьюки, Дж. Алгоритм машинного вычисления комплексных рядов Фурье. Math. Расчет ., 1965, 19 (90), 297-301.
|
Г-н Абхиджит С. Кулкарни получил степень бакалавра в области электроники в Университете Пуны в 2005 году. В настоящее время он работает научным сотрудником в Исследовательском учреждении оборонной авионики (DARE), Банглор.Он принимал участие в проектировании, разработке и тестировании узкополосного цифрового приемника для бортовых систем РЭБ.
|
|
|
Г-н Виджеш P получил степень BTech (Электроника и связь) в Университете Каннур в 2003 году. В настоящее время он работает научным сотрудником в DARE, Банглор. В его сферу деятельности входят: проектирование встроенного оборудования, разработка прошивки, внедрение и тестирование систем радиоэлектронной борьбы. |
|
|
Г-н Хемант В.Паранджапе получил степень бакалавра в области электроники и телекоммуникаций в Университете Пуны и степень бакалавра в области телекоммуникаций в Индийском институте науки в 2000 и 2002 годах соответственно. В настоящее время он DARE, Banglore. В настоящее время его интересы включают: проектирование оборудования, разработку и системную интеграцию систем радиоэлектронной борьбы. |
|
|
Д-р К. Махесвара Редди получил докторскую степень в Индийском институте науки в 1998 году.В настоящее время он работает ученым в DARE, Banglore. Он получил награду DRDO Performance Excellence Award в 2007, 2009 и награду DRDO Scientist of the Year в 2010 году. Его текущие области интересов включают: цифровые приемники для приложений РЭБ, методы оценки радиопеленгации с высоким разрешением и адаптивные массивы. |
Как сделать календарь в Excel
Что нужно знать
- Самый простой способ — использовать многочисленные готовые шаблоны календарей: перейдите к Файл > Новый > «календарь» в поле поиска > выберите календарь> Создать .
- Или используйте Excel, чтобы создать собственный календарь.
В этой статье рассказывается о четырех различных способах создания календаря в Excel. Инструкции применимы к Excel 2019, Excel 2016, Excel 2013, Excel 2010, Excel для Mac, Excel для Android и Excel Online.
Как сделать готовый календарь в Excel
Вы можете создать свой собственный календарь в Excel с нуля, но самый простой способ создать календарь — использовать готовый шаблон календаря. Шаблоны полезны, потому что вы можете редактировать каждый день, чтобы включить в него особые события, а затем распечатывать каждый месяц, когда захотите.
tigerlily713 / Pixabay-
Выберите Файл > Новый .
-
В поле поиска введите календарь и выберите лупу, чтобы начать поиск.
-
Выберите стиль календаря, который соответствует вашим потребностям. В этом примере используется календарь Любой год . Выбрав календарь, выберите Создать .
-
Каждый шаблон календаря имеет уникальные особенности.Шаблон календаря на любой год Шаблон , в частности, позволяет вводить новый год или начальный день недели для автоматической настройки календаря.
Как создать собственный ежемесячный календарь в Excel
Если вам не нравятся ограничения шаблона календаря, вы можете создать свой собственный календарь с нуля в Excel.
-
Откройте Excel и введите дни недели в первой строке таблицы. Этот ряд станет основой вашего календаря.
-
В семи месяцах года 31 день, поэтому первый этап этого процесса — создать для календаря месяцы, в которых 31 день. Это будет сетка из семи столбцов и пяти строк.
Для начала выберите все семь столбцов и отрегулируйте ширину первого столбца до желаемого размера календарных дней. Все семь столбцов будут одинаковыми.
-
Затем отрегулируйте высоту строк, выбрав пять строк под строкой дня недели.Отрегулируйте высоту первого столбца.
Чтобы отрегулировать высоту нескольких строк одновременно, просто выделите строки, которые вы хотите отрегулировать, прежде чем изменять высоту.
-
Затем вам нужно выровнять номера дней в правом верхнем углу каждого дневного поля. Выделите каждую ячейку во всех семи столбцах и пяти строках. Щелкните правой кнопкой мыши одну из ячеек и выберите Формат ячеек . В разделе выравнивание текста установите по горизонтали на справа (отступ) и установите по вертикали на сверху .
-
Теперь, когда выравнивание ячеек готово, пришло время пронумеровать дни. Вам нужно знать, какой день является первым днем января текущего года, поэтому введите в Google «январь» год, для которого вы составляете календарь. Найдите пример календаря на январь. Например, в 2020 году первый день месяца начинается в среду.
В 2020 году, начиная со среды, нумеруйте даты в последовательном порядке, пока не дойдете до 31.
-
Теперь, когда у вас закончился январь, пришло время назвать и создать остальные месяцы.Скопируйте январский лист, чтобы создать февральский лист.
Щелкните правой кнопкой мыши имя листа и выберите Переименовать . Назовите его , январь . Еще раз щелкните лист правой кнопкой мыши и выберите Переместить или Копировать . Выберите Создайте копию . В разделе Перед листом выберите (перейти в конец) . Выберите OK , чтобы создать новый лист.
-
Переименуйте этот лист. Щелкните правой кнопкой мыши лист, выберите Переименовать и введите Февраль .
-
Повторите описанный выше процесс в течение оставшихся 10 месяцев.
-
Теперь пришло время настроить номера дат для каждого месяца после январского месяца, указанного в шаблоне. Начиная с февраля, перенесите дату начала месяца на любой день недели, следующий за последним днем января. Сделайте то же самое до конца календарного года.
Не забудьте удалить несуществующие даты из месяцев, длина которых не превышает 31 день. К ним относятся: февраль (28 дней — 29 дней в високосном году), апрель, июнь, сентябрь и ноябрь (30 дней).
-
В качестве последнего шага вы можете пометить каждый месяц, добавив строку вверху каждого листа. Вставьте верхнюю строку, щелкнув ее правой кнопкой мыши и выбрав Вставить . Выделите все семь ячеек над днями недели, выберите меню Home , а затем выберите Merge & Center на ленте. Введите название месяца в единственную ячейку и измените размер шрифта на 16 . Повторите процесс до конца календарного года.
Когда вы закончите нумерацию месяцев, у вас будет точный календарь в Excel на весь год.
Вы можете распечатать любой месяц, выбрав все ячейки календаря и выбрав Файл > Печать . Измените ориентацию на Альбомная . Выберите Page Setup , выберите вкладку Sheet , а затем включите Gridlines в разделе Print.
Выберите OK , а затем Распечатайте , чтобы отправить свой ежемесячный календарный лист на принтер.
Как создать собственный недельный календарь в Excel
Еще один отличный способ оставаться организованным — создать недельный календарь с почасовыми блоками.Вы можете создать полный 24-часовой календарь или ограничить его обычным графиком работы.
-
Откройте пустой лист Excel и создайте строку заголовка. Оставив первый столбец пустым, добавьте в первую строку час, когда вы обычно начинаете свой день. Продолжайте продвигаться по строке заголовка, добавляя час, пока ваш день не будет завершен. Когда закончите, выделите весь ряд жирным шрифтом.
-
Оставляя первую строку пустой, введите дни недели в первом столбце. Когда закончите, выделите весь столбец жирным шрифтом.
-
Выделите все строки, в которых указаны дни недели. После того, как все будут выделены, измените размер одной строки до размера, который позволит вам вносить свой вклад в ежедневную / почасовую повестку дня.
-
Выделите все столбцы, в которых указаны часы каждого дня. После того, как все будут выделены, измените размер одного столбца до размера, который позволит вам вносить свой вклад в ежедневную / почасовую повестку дня.
-
Чтобы распечатать новую повестку дня, выделите все ячейки повестки дня. Выберите Файл > Печать .Измените ориентацию на Альбомная . Выберите Page Setup , выберите вкладку Sheet , а затем включите Gridlines в разделе Print. Измените масштабирование на Уместить все столбцы на одной странице . Это уместит ежедневную повестку дня на одну страницу. Если ваш принтер поддерживает это, измените размер страницы на Таблоид (11 «x 17») .
Как создать собственный годовой календарь в Excel
Некоторым людям годового календаря более чем достаточно, чтобы вы могли выполнять задачу весь год.Этот дизайн касается даты и месяца, а не дня недели.
-
Откройте пустой лист Excel и, оставив первый столбец черным, добавьте январь в первую строку. Двигайтесь по строке заголовка, пока не дойдете до декабря. Когда закончите, выделите весь ряд жирным шрифтом.
-
Оставляя первую строку пустой, введите дни месяца в первом столбце. Когда закончите, выделите весь столбец жирным шрифтом.
Не забудьте удалить несуществующие даты из месяцев, длина которых не превышает 31 день.К ним относятся: февраль (28 дней — 29 дней в високосном году), апрель, июнь, сентябрь и ноябрь (30 дней).
-
Выделите все строки, в которых указаны дни месяца. После того, как все будут выделены, измените размер одной строки до размера, который позволит вам писать в своей ежедневной повестке дня.
-
Выделите все столбцы, в которых указаны месяцы года. После того, как все будут выделены, измените размер одного столбца до размера, который позволит вам писать в своей ежедневной повестке дня.
-
Чтобы распечатать новую годовую повестку дня, выделите все ячейки повестки дня.Выберите Файл > Печать . Измените ориентацию на Альбомная . Выберите Page Setup , выберите вкладку Sheet , а затем включите Gridlines в разделе Print. Измените масштабирование на Уместить все столбцы на одной странице . Это поместит повестку дня на одну страницу.
Спасибо, что сообщили нам!
Расскажите, почему!
Другой Недостаточно подробностей Трудно понятьУниверсальный блог путешественников SeattleFlyerGuy: 2013
Около месяца назад я узнал о компании под названием Clever Travel Companion.Они предлагают разнообразную одежду с защитой от взлома, которая ориентирована на заядлых путешественников. Карманы обычно являются одним из главных опасений для путешественников, а некоторые другие варианты, такие как шейный мешочек майки, могут быть немного хлопотными. Похоже, это был бы хороший микс, и я всецело поддерживаю небольшие компании, когда могу. Тот факт, что люди, которые им управляют, являются выходцами из Швеции, насколько я могу судить, тоже не повредит …Обзор
В итоге у меня была пара мужчин и пара женщин для моей девушки.Нижнее белье имеет ширинку на пуговицах и два кармана по бокам. Карманы достаточно большие, чтобы их можно было использовать (например, они идеально подходят для паспорта), но не слишком большие, чтобы ничему не мешать. Ткань очень приятная на ощупь и будет долговечной в длительной поездке.Хорошие вещи и окрестности города
Чтобы опробовать их, я загрузил карманы и отправился в путешествие в Викторию, Британская Колумбия, через Kenmore Air. Если они собирались в конечном итоге почувствовать себя некомфортно, быстрый полет на гидросамолете и прогулка с рюкзаком, вероятно, помогут.После половины прогулки с рюкзаком и целого дня бега по Виктории, я рад сказать, что в целом они остались удобными, без того, что застежка-молния никуда не высовывалась, а карманы неловко сжимались (как я опасался, это могло произойти). Извлекать предметы из кармана было немного сложно, но это карманы безопасности. В реальной жизни вы бы извинились в туалете, а затем достали бы то, что вам нужно, из своего, да, карманного кармана нижнего белья.
У меня также есть достоверные сведения, что женская версия одинаково удобна, хотя у меня нет прямого опыта в этом… Фиолетовый цвет приятный, а карманы такого же размера, как и мужские.