Как устроены электродвигатели постоянного тока. Какие бывают виды ДПТ. Как работают двигатели постоянного тока. Где применяются ДПТ. Какие преимущества и недостатки у электродвигателей постоянного тока.
Устройство электродвигателя постоянного тока
Электродвигатель постоянного тока (ДПТ) состоит из следующих основных частей:
- Статор — неподвижная часть двигателя, создающая магнитное поле
- Ротор (якорь) — вращающаяся часть двигателя
- Коллектор — устройство для подвода тока к обмоткам ротора
- Щетки — обеспечивают контакт между коллектором и внешней цепью
- Подшипники — поддерживают вал ротора
Статор ДПТ обычно представляет собой цилиндрический корпус с полюсами. На полюсах размещаются обмотки возбуждения, создающие магнитное поле. Ротор имеет обмотку, уложенную в пазах сердечника. Концы обмотки ротора присоединены к пластинам коллектора.
Принцип работы двигателя постоянного тока
Принцип действия ДПТ основан на взаимодействии магнитного поля статора и тока в обмотке ротора. При подаче постоянного тока на обмотку ротора возникает электромагнитный момент, заставляющий ротор вращаться.

Ключевые этапы работы ДПТ:
- Ток подается на обмотку ротора через щетки и коллектор
- В обмотке ротора возникает магнитное поле
- Магнитное поле ротора взаимодействует с полем статора
- Возникает вращающий момент, приводящий ротор в движение
- При вращении ротора коллектор переключает направление тока в его обмотках
Такой принцип обеспечивает непрерывное вращение ротора двигателя постоянного тока.
Виды электродвигателей постоянного тока
ДПТ классифицируются по способу возбуждения магнитного поля статора:
- С независимым возбуждением — обмотка возбуждения питается от отдельного источника
- С параллельным возбуждением — обмотка возбуждения подключена параллельно якорю
- С последовательным возбуждением — обмотка возбуждения включена последовательно с якорем
- Со смешанным возбуждением — комбинация параллельного и последовательного
- С возбуждением от постоянных магнитов
Каждый тип имеет свои особенности характеристик и области применения.
Применение двигателей постоянного тока
ДПТ широко используются в различных сферах благодаря своим уникальным свойствам:
- Электротранспорт (трамваи, троллейбусы, электровозы)
- Станки с регулируемой скоростью
- Подъемно-транспортные механизмы
- Промышленные роботы и манипуляторы
- Сервоприводы
- Электромобили
- Бытовая техника (электроинструменты, игрушки)
Преимущества и недостатки ДПТ
Основные достоинства двигателей постоянного тока:
- Широкий диапазон регулирования скорости
- Высокая точность регулирования
- Большой пусковой момент
- Компактность при высокой мощности
К недостаткам можно отнести:
- Сложность конструкции коллекторного узла
- Необходимость регулярного обслуживания щеточно-коллекторного узла
- Искрение щеток при работе
- Относительно высокая стоимость
Регулирование скорости двигателей постоянного тока
Одно из главных преимуществ ДПТ — возможность плавного регулирования скорости в широком диапазоне. Основные способы регулирования:
- Изменение напряжения на якоре
- Изменение магнитного потока (тока возбуждения)
- Введение добавочного сопротивления в цепь якоря
Выбор метода зависит от требуемого диапазона регулирования и типа двигателя.

Особенности эксплуатации электродвигателей постоянного тока
При эксплуатации ДПТ следует учитывать некоторые особенности:
- Необходимость регулярного обслуживания коллекторно-щеточного узла
- Контроль искрения щеток
- Соблюдение режимов работы (особенно для двигателей с последовательным возбуждением)
- Защита от перегрузок и коротких замыканий
- Обеспечение вентиляции для охлаждения
Правильная эксплуатация позволяет продлить срок службы двигателя и повысить его надежность.
Бесколлекторные двигатели постоянного тока
Современной альтернативой классическим ДПТ являются бесколлекторные (вентильные) двигатели. Их особенности:
- Отсутствие щеточно-коллекторного узла
- Электронная коммутация обмоток
- Высокий КПД
- Низкий уровень шума и электромагнитных помех
- Длительный срок службы
Бесколлекторные ДПТ находят все более широкое применение в различных отраслях.
Схема подключения двигателя постоянного тока 220 вольт
Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. п. Двигатели постоянного тока (ДПТ) устанавливаются в автомобилях: в вентиляторах и различных приводах. Они почти всегда используются на электротранспорте и реже в производстве.
Преимущества ДПТ по сравнению с асинхронными моторами:
- Хорошо поддаются регулировке.
- Отличные пусковые свойства.
- Частоты вращения могут быть более 3000 об/мин.
Недостатки ДПТ:
- Низкая надежность.
- Сложность изготовления.
- Высокая стоимость.
- Большие затраты на обслуживание и ремонт.
Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока.
Содержание
- Принцип действия электродвигателя постоянного тока
- Принципиальные схемы электродвигателя постоянного тока
- Реверсирование двигателей постоянного тока
- Регулирование оборотов двигателей постоянного тока
- Электродвигатели постоянного тока
- Торможение электрического двигателя постоянного тока
- Преимущества двигателей постоянного тока
- Принцип действия ДПТ
- Принципиальные схемы ДПТ
- Схема для подключения двигателя с возбуждением параллельным
- Электродвигатель постоянного тока с параллельным возбуждением
- Бесщеточные моторы
- Где купить электродвигатель
- Как подключить двигатель постоянного тока?
- Как работает электрический двигатель?
- Различные схемы подключения обмоток
- 32.
 Основные схемы включения дпт. Независимое возбуждение
Основные схемы включения дпт. Независимое возбуждение - Параллельное возбуждение
- Последовательное возбуждение
- Смешанное возбуждение
- 33. Характеристика дпт с независимым возбуждением.
- Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
- Электродвигатели постоянного тока. Устройство и работа. Виды
- Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
- Электродвигатели постоянного тока разделяют по характеру возбуждения.
- Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Возбуждение двигателя постоянного тока
- Двигатель с независимым возбуждением
- ДПТ с параллельным возбуждением
- ДПТ с последовательным возбуждением
- ДПТ со смешанным возбуждением
- Схема включения двигателя постоянного тока в сеть 110 и 220вольт
- Порядок и схема включения двигателя постоянного тока
- Пуск двигателей постоянного тока
- Прямой пуск
- Пуск с помощью пускового реостата или пусковых сопротивлений
- Пуск при пониженном напряжении цепи якоря
- Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) — Help for engineer
- Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
- Тормозные режимы
Принцип действия электродвигателя постоянного тока
Устройство двигателя аналогично синхронным двигателям переменного тока.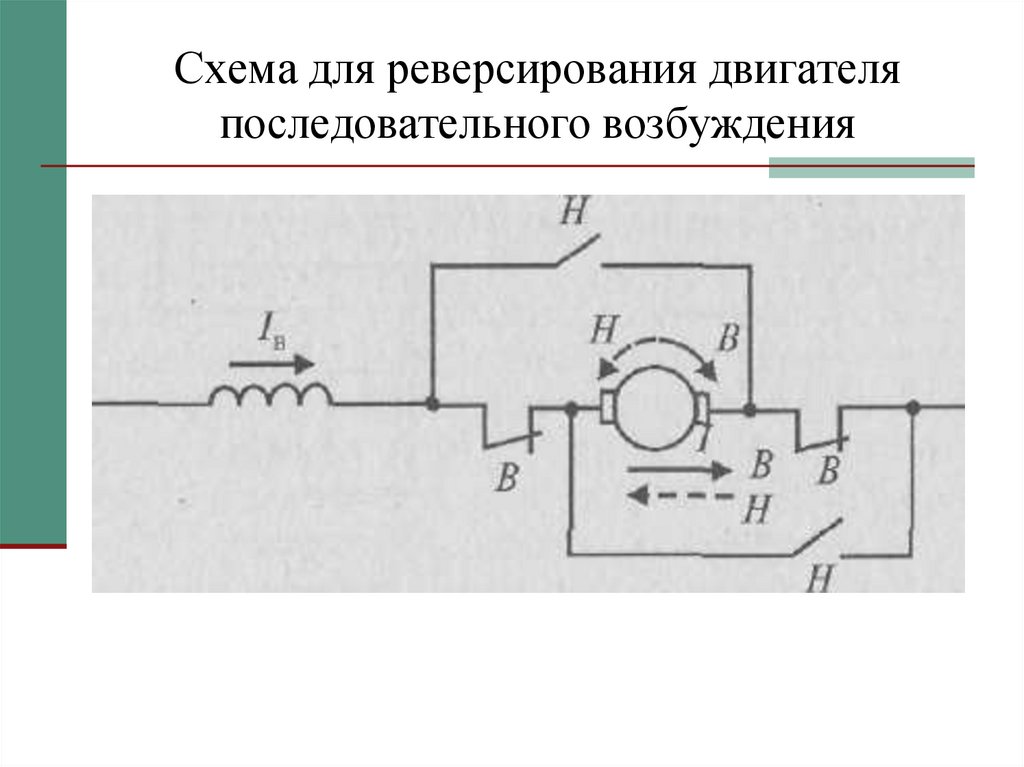 Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье.
Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Принципиальные схемы электродвигателя постоянного тока
Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения.
Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения.
В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным.
На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Между обмотками возбуждения и якоря нет электрической связи.
Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. В жизни редко встречается.
В жизни редко встречается.
Реверсирование двигателей постоянного тока
Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе.
Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов.
Регулирование оборотов двигателей постоянного тока
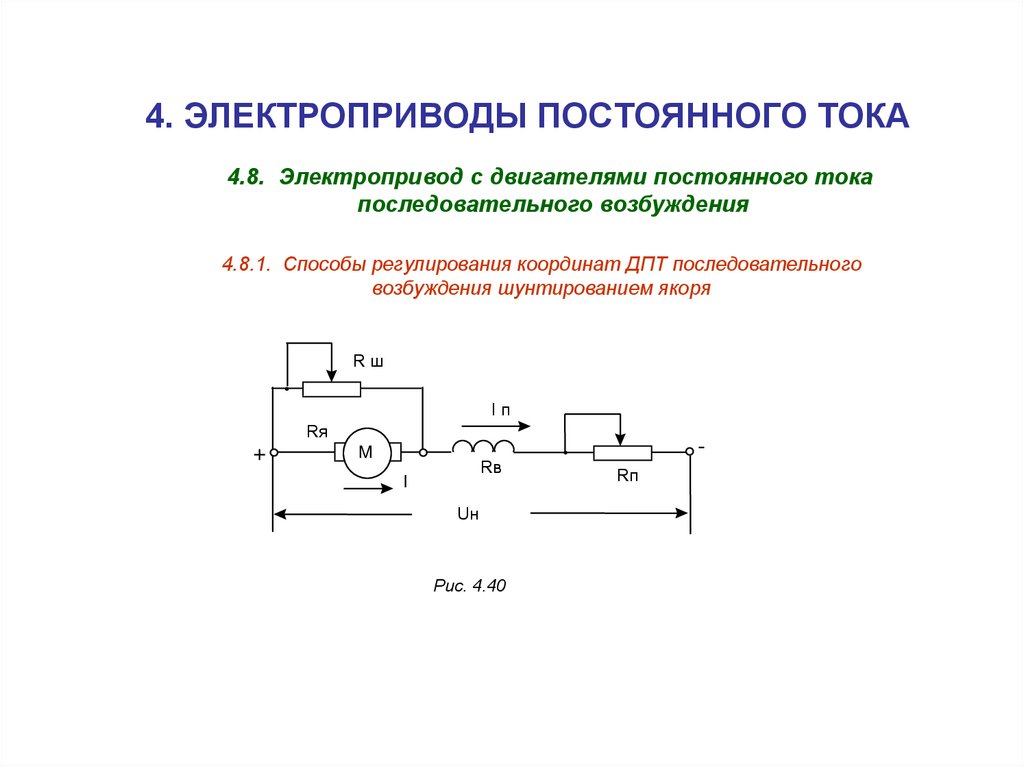
ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем.
Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения.
На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления.
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин.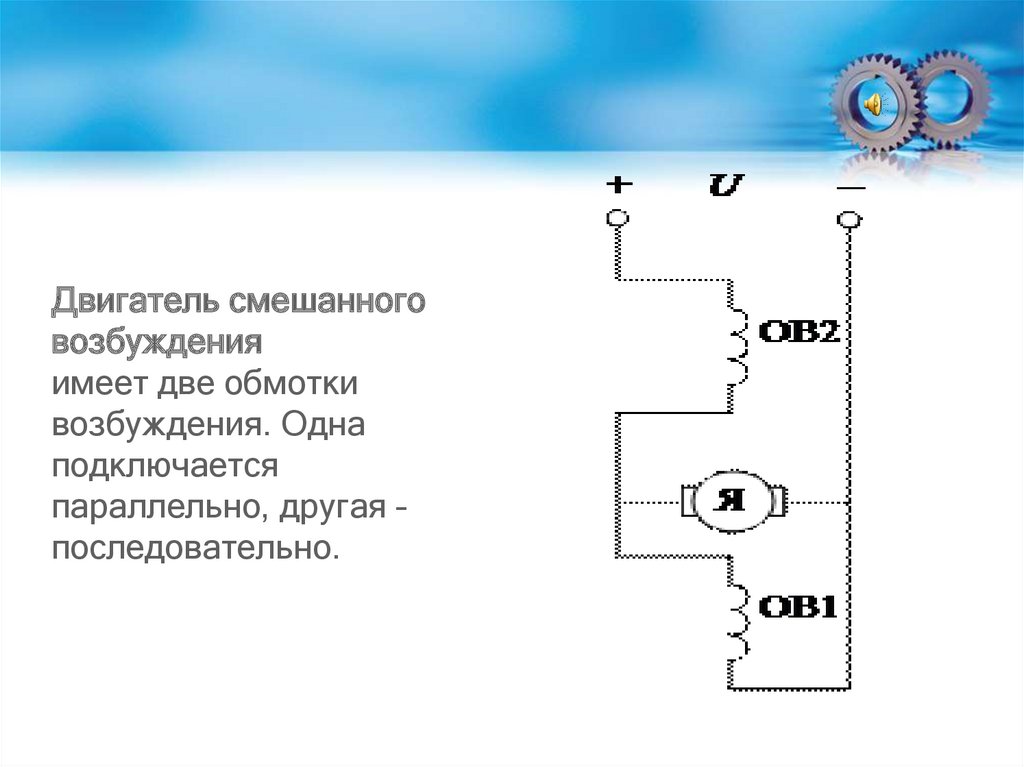 К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.

- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
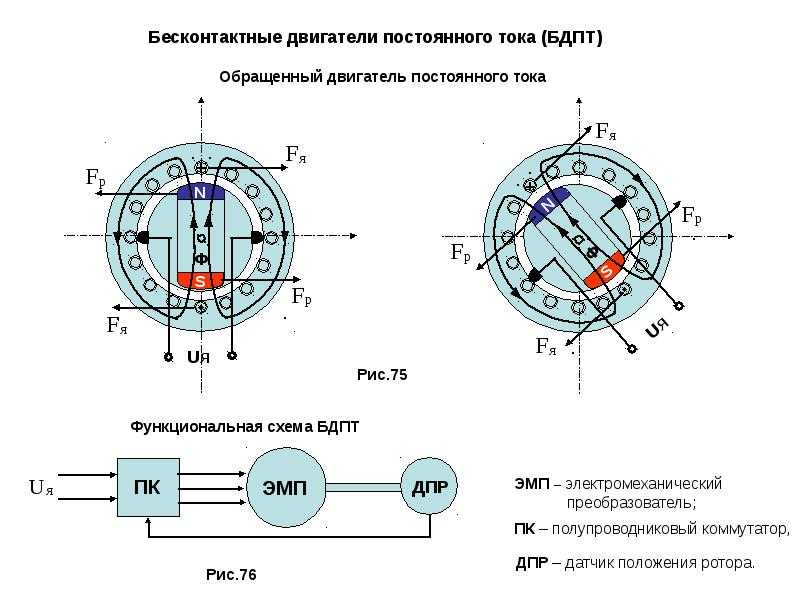
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).
Состоит блок управления из нескольких узлов:
- Системы импульсно-фазового управления СИФУ.
- Регулятора
- Защиты.
Где купить электродвигатель
Многие компании с мировыми именами выпускают сегодня электродвигатель постоянного тока 220 В. Купить его можно в интернет — магазинах, менеджеры которых предоставят исчерпывающую онлайн информацию, касающуюся выбранной модели. Большой выбор моделей таких двигателей на сайте в каталоге которого можно ознакомиться со стоимостью моделей, их описанием и пр. Если даже в каталоге нет интересующего двигателя, можно заказать его доставку.
Как подключить двигатель постоянного тока?
Двигатели постоянного тока используется в промышленности лишь в том случае, когда требуется регулировать скорость вращения очень точно.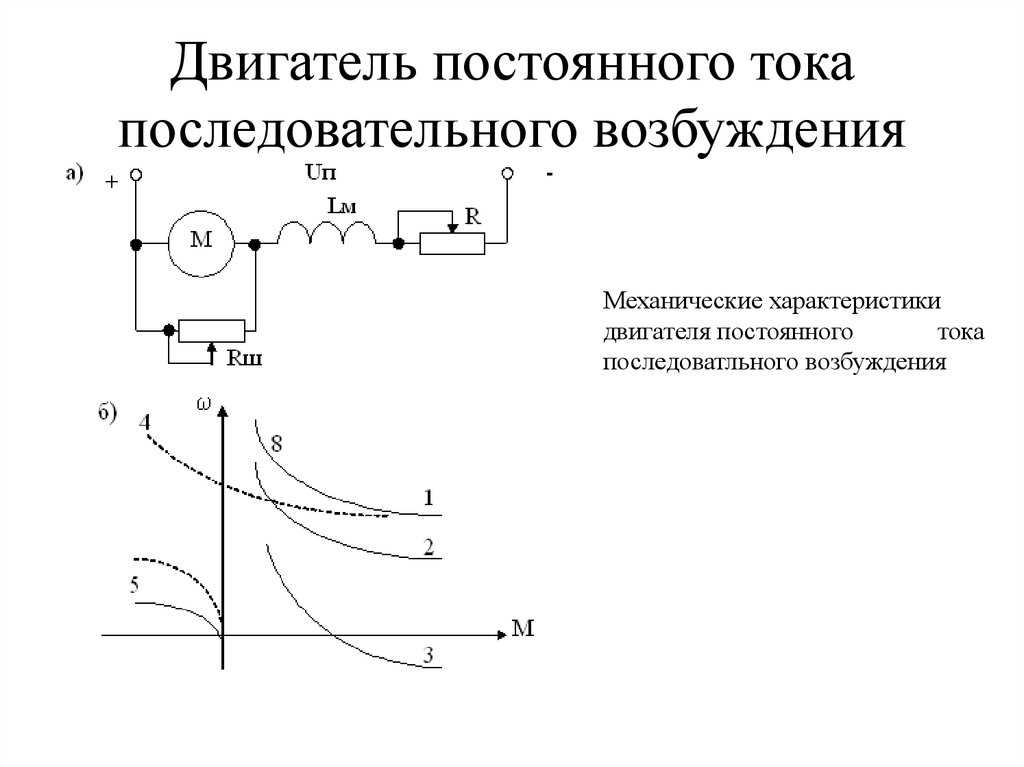 В данной публикации подробно рассмотрим методы подключения, а также принцип работы двигателя постоянного тока.
В данной публикации подробно рассмотрим методы подключения, а также принцип работы двигателя постоянного тока.
Стоит отметить, что данная статья является ознакомительной. Она предоставляет лишь поверхностную информацию в отношении подключения электрического двигателя.
Как работает электрический двигатель?
Ниже будут представлены два элемента, без которых электрический двигатель существовать не может:
- статор;
- ротор.
Статор – неподвижная часть электрического двигателя. В нем располагаются пазы, куда и укладывается электрическая обмотка. В зависимости от количества витков изменяются технические характеристики двигателя.
Ротор – это подвижная часть электрического двигателя. Стоит отметить огромную важность воздушного зазора между статором и ротором. И речь идет не только о том, чтобы ротор вращался свободно.
Именно в воздушном зазоре возникает магнитный поток, который начинает вращать ротор.
Различные схемы подключения обмоток
Существует несколько различных систем подключения: с независимым возбуждением, с последовательным возбуждением, с параллельным возбуждением, смешанная.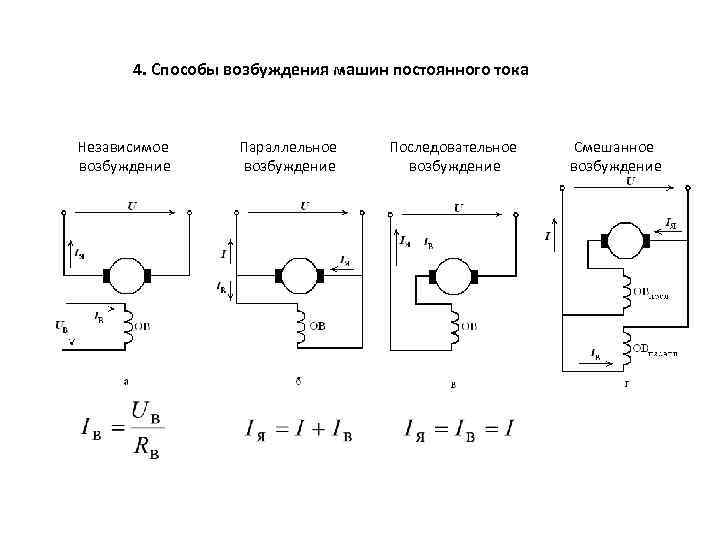
В зависимости от этих типов подключения будут зависеть пусковые характеристики двигателя постоянного тока.
В завершение следует несколько слов сказать и о сфере применения двигателей постоянного тока. Дело в том, что ДТП является наиболее популярным электрическим двигателем. Он широко используется не только в промышленности, но и в быту.
Вряд ли стоит объяснять, что любой двигатель может быть превращен в генератор. Генераторы постоянного тока используется в автомобилях. Кроме того, практически все малогабаритные двигатели, которые используются в быту от аккумулятора, представляют собой не что иное, как двигатель постоянного тока.
Как уже было сказано выше, широкое распространение двигатель постоянного тока получил за счет того, что имеется простая возможность регулировки скорости его вращения. Осуществляется это при помощи изменения сопротивления якоря.
Канал «Советы электрика» расскажет о принципах функционирования двигателя постоянного тока:
32. Основные схемы включения дпт.
 Независимое возбуждение
Независимое возбуждениеОбмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.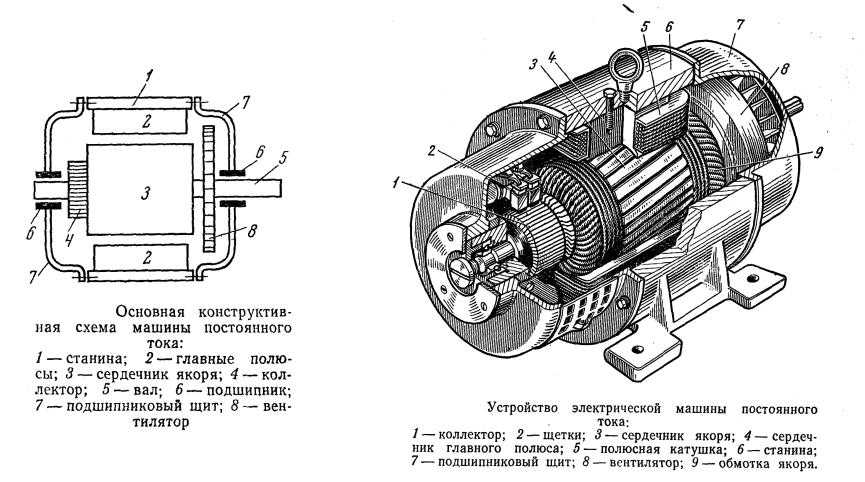
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.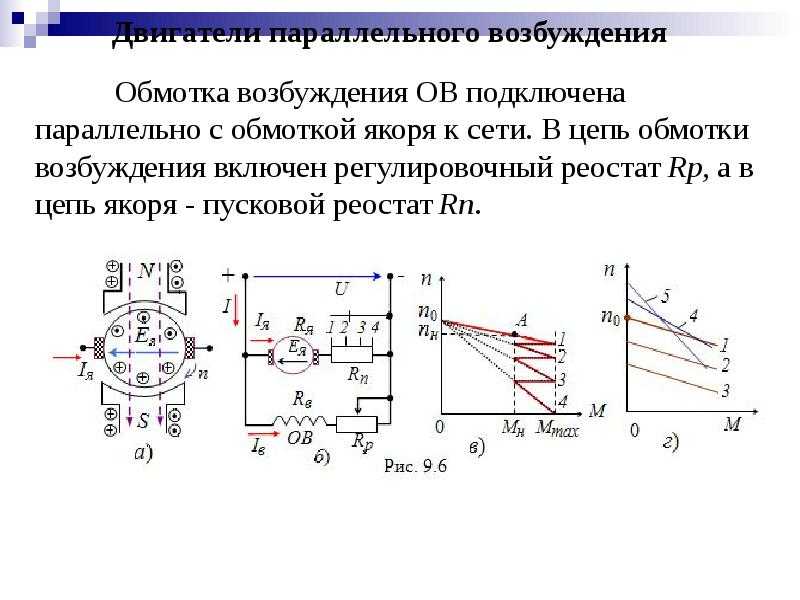
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока.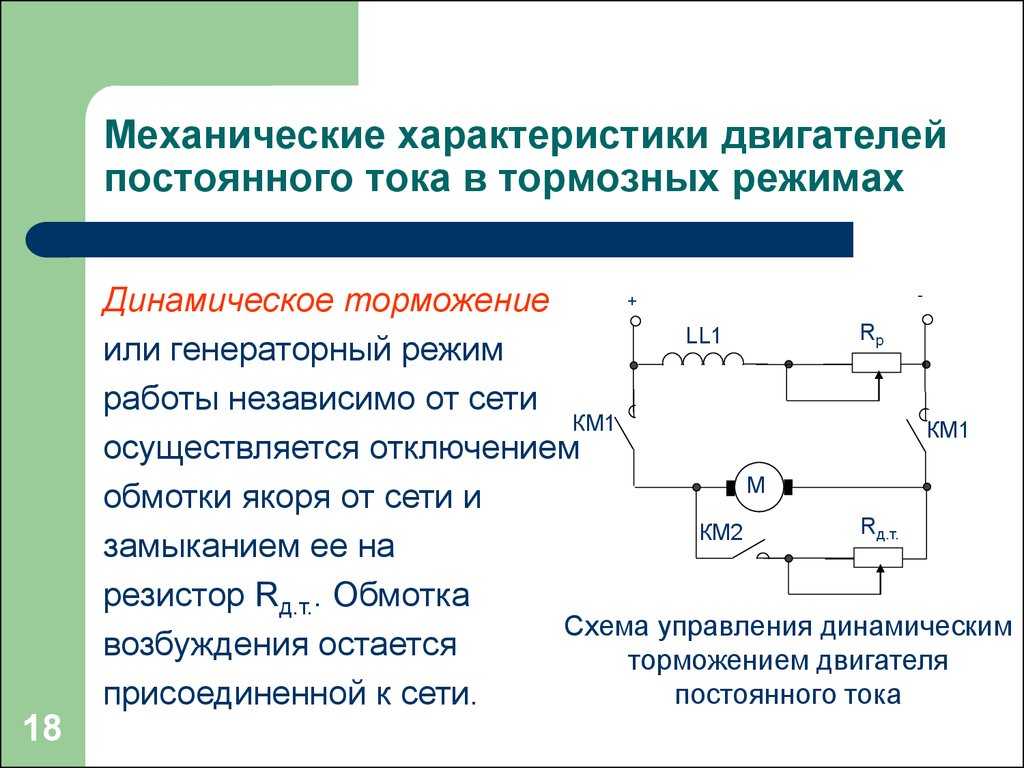 В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение.
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель.
Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением.
Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток.
Электродвигатели постоянного тока разделяют по характеру возбуждения.
Независимое возбуждение
При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин.
Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя.
Параллельное возбуждение
Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков.
Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора.
Последовательное возбуждение
В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта.
Смешанное возбуждение
Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием.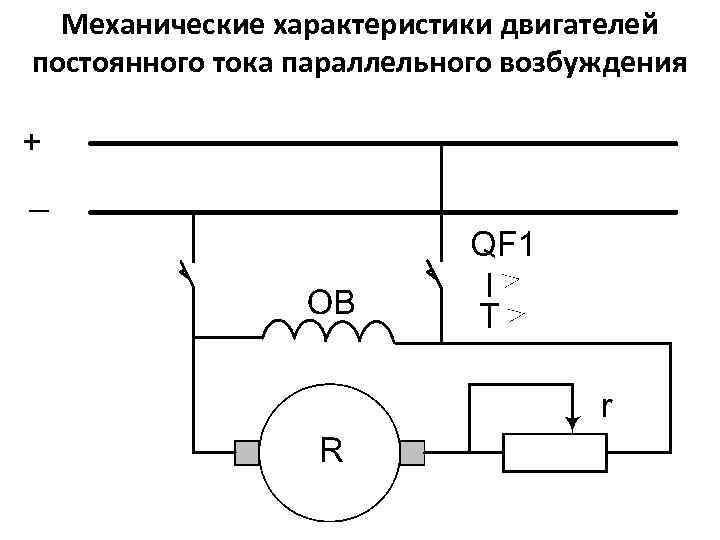 В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением.
Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов.
Особенности эксплуатации
Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне.
Такие электродвигатели можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза.
Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается.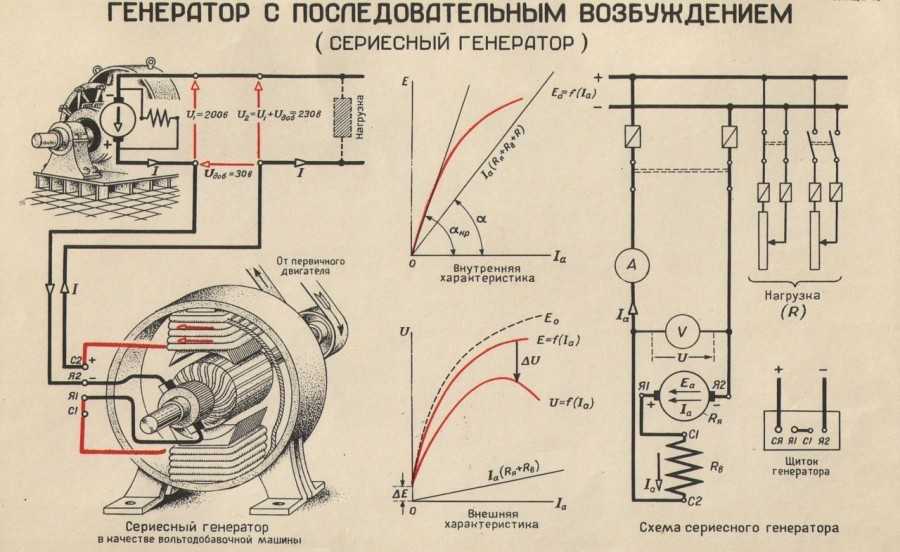 Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата.
Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз.
Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания.
На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые модели электродвигателей обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%.
Преимущества электродвигателей постоянного тока
- Небольшие габаритные размеры.
- Легкое управление.
- Простая конструкция.
- Возможность применения в качестве генераторов тока.

- Быстрый запуск, особенно характерный для моторов с последовательной схемой возбуждения.
- Возможность плавной регулировки скорости вращения вала.
- Для подключения и эксплуатации необходимо приобретать специальный блок питания постоянного тока.
- Высокая стоимость.
- Наличие расходных элементов в виде медно-графитных быстроизнашивающихся щеток, изнашивающегося коллектора, что значительно снижает срок эксплуатации, и требует периодического технического обслуживания.
Сфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
- Электромобилей.
- Электровозов.
- Трамваев.
- Электричек.
- Троллейбусов.
- Подъемно-транспортных механизмов.
- Детских игрушек.
- Промышленного оборудования с необходимостью управлением скорости вращения в большом диапазоне.
Возбуждение двигателя постоянного тока
Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное.
Двигатель с независимым возбуждением
В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода.
ДПТ с параллельным возбуждением
По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания.
ДПТ с последовательным возбуждением
При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения.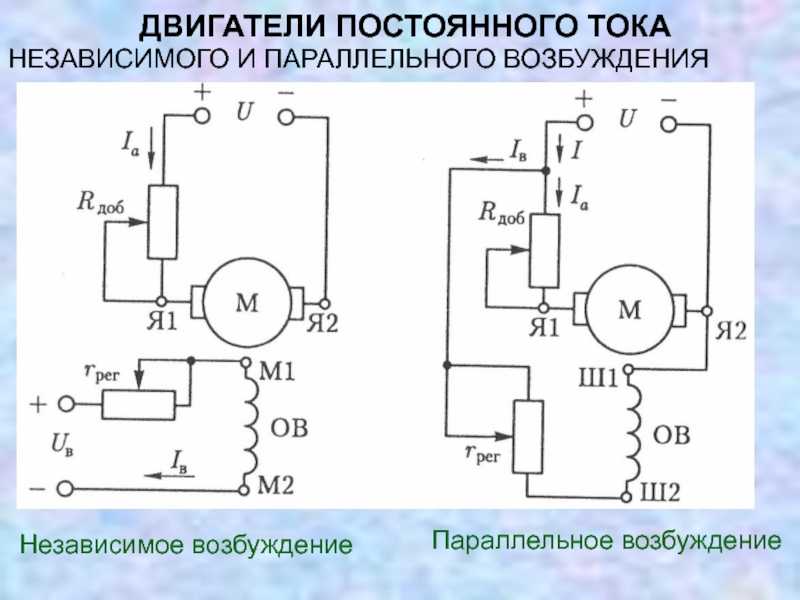 Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
Схема включения двигателя постоянного тока в сеть 110 и 220вольт
Часто в условиях домашней мастерской, оснащенной различным оборудованием и механизмами, возникает необходимость подключения к сети двигателя постоянного тока.
Самой востребованной и популярной выступает схема с использованием пускового реостата. Этот элемент отвечает за понижение показателей пускового тока, возникающего при включении двигателя. Пусковой ток нуждается в корректировке, так как превышает номинальный показатель в 10-20р. Двигатель постоянного тока, а точнее обмотка может не справиться с такой нагрузкой.
На схеме ниже представлено подключение пускового реостата по последовательной схеме с цепью якоря.
- Л – соединенный с сетью зажим;
- М – соединенный с цепью возбуждения зажим-фиксатор;
- Я – соединенный с якорем зажим;
- 1 – дуга, 2 – рычаг, 3 – контакт рабочий.

Включение и управление двигателем постоянного тока важно выполнять, принимая во внимание информацию, приведенную на самом агрегате или в инструкции (если таковая еще сохранилась).
Представленная схема двигателя постоянного тока оптимальна для агрегатов, мощность которых превышает 0,5кВт. Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой:
Расшифровка обозначений: Rn – пусковое сопротивление реостата, U – напряжение сети (100 или 220), Iном – номинальное значение тока электрического двигателя, Rя – показатели сопротивления обмотки якоря.
Порядок и схема включения двигателя постоянного тока
- Установите рычаг на реостате в положение «0» — холостой контакт;
- После включения сетевого рубильника необходимо перевести этот рычаг в положение первого промежуточного контакта. Подключаемый двигатель постоянного тока перейдет в стадию возбуждения. По якорной цепи потечет ток, показатель которого зависит от величины сопротивления, включающего все 4 секции пускового реостата;
- Посредством увеличения частоты вращения якоря пусковой ток снижается.
 В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
В результате уменьшается и сопротивление, возникшее при пуске. Для выполнения задачи рычаг реостата постепенно проводят по контактам до тех пор, пока он не займет рабочего контакта. НЕ задерживайтесь на промежуточных контактах, на такие нагрузки пусковые реостаты не рассчитаны.
Схема двигателя постоянного тока предполагает и определенную последовательность действий для его отключения.
Двигатель постоянного тока отключается не сразу. После перевода рукояти реостата в крайнее левое положение агрегат отключится, но обмотка останется замкнутой. Только после этого питание двигателя можно выключать.
Если игнорировать приведенный выше порядок действий, при размыкании цепи велик риск возникновения напряжения такой силы, которая выведет электрический двигатель из строя.
Включение двигателя постоянного тока для промышленных применений может отличаться.
Пуск двигателей постоянного тока
При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя. Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
Прямой пуск
При n = 0 также Eа = 0 и, согласно выражению (5), в статье «Общие сведения о двигателях постоянного тока»
В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик:
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с.
Пуск с помощью пускового реостата или пусковых сопротивлений
Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1). При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
При этом вместо выражения (5), в статье «Общие сведения о двигателях постоянного тока» имеем
а в начальный момент пуска, при n = 0,
где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн .
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а).
Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье «Общие сведения о двигателях постоянного тока», при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0.
При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье «Общие сведения о двигателях постоянного тока», Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону.
| Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя |
Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2).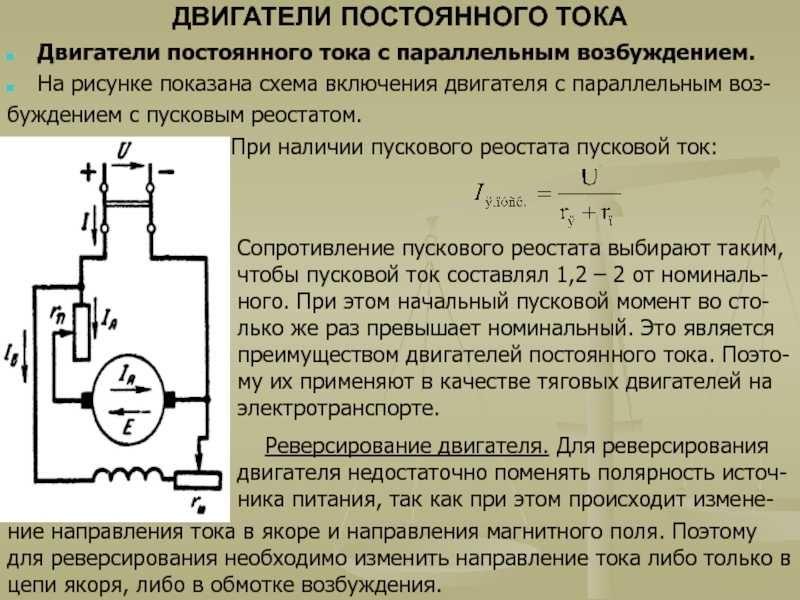 Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст .
Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст .
При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн.
Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье «Общие сведения о двигателях постоянного тока», значения избыточного, или динамического, момента
под воздействием которого происходит увеличение n.
Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми.
По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье «Общие сведения о двигателях постоянного тока», будет сильно увеличиваться («разнос» двигателя). При этом ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Источник: Вольдек А. И., «Электрические машины. Учебник для технических учебных заведений» – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с.
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) — Help for engineer
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.
Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.
Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в «разнос». Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).
Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| — питающее напряжение; |
| — магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.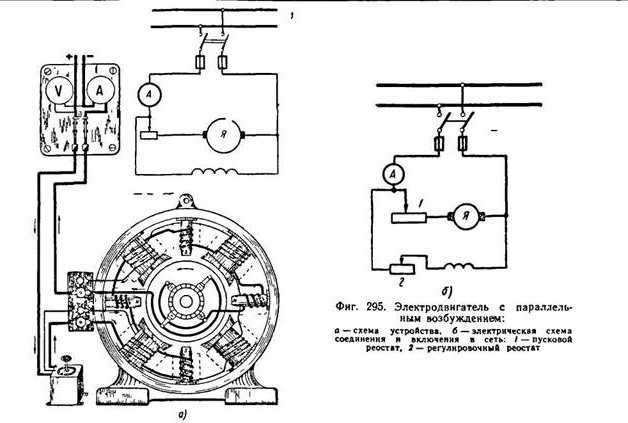
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.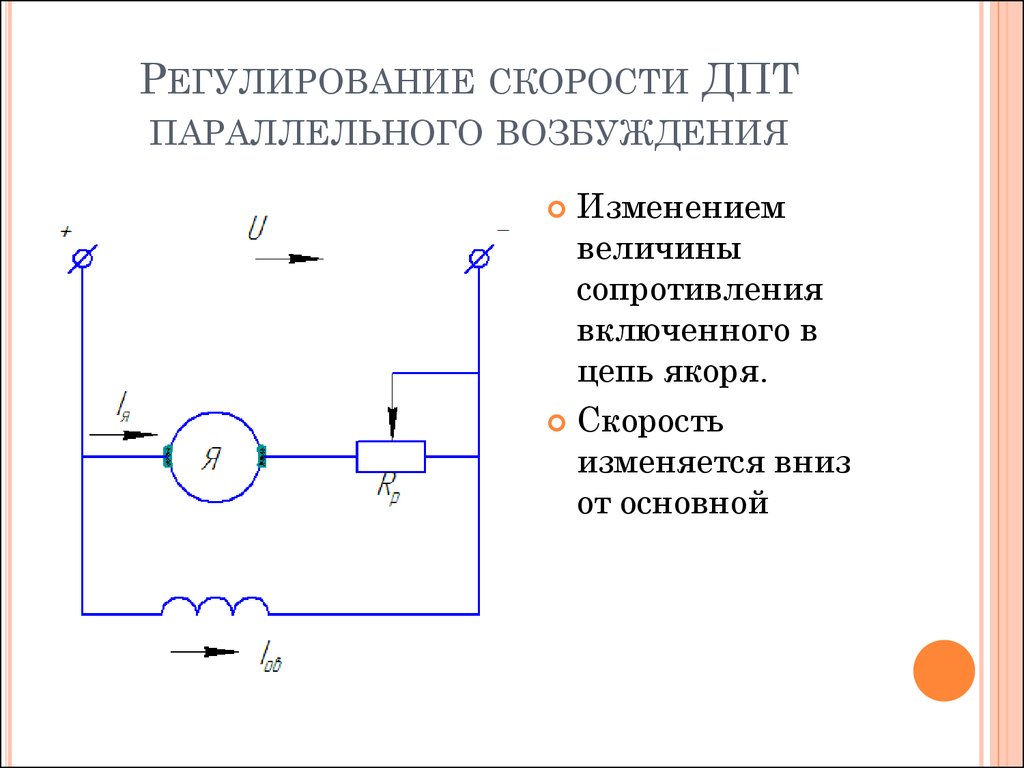
Электродвигатель постоянного тока: схема подключения, принцип работы
Статьи
Автор Светозар Тюменский На чтение 3 мин. Просмотров 13.8k. Опубликовано Обновлено
Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов.
Содержание
- Схема подключения электродвигателя постоянного тока
- Устройство электродвигателя постоянного тока
- Принцип действия электродвигателя постоянного тока
- Электродвигатель постоянного тока 12 Вольт
- Электродвигатель постоянного тока П -11 С1 У4 работа
- Двигатель постоянного тока (часть 1)
- Электродвигатели постоянного тока
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.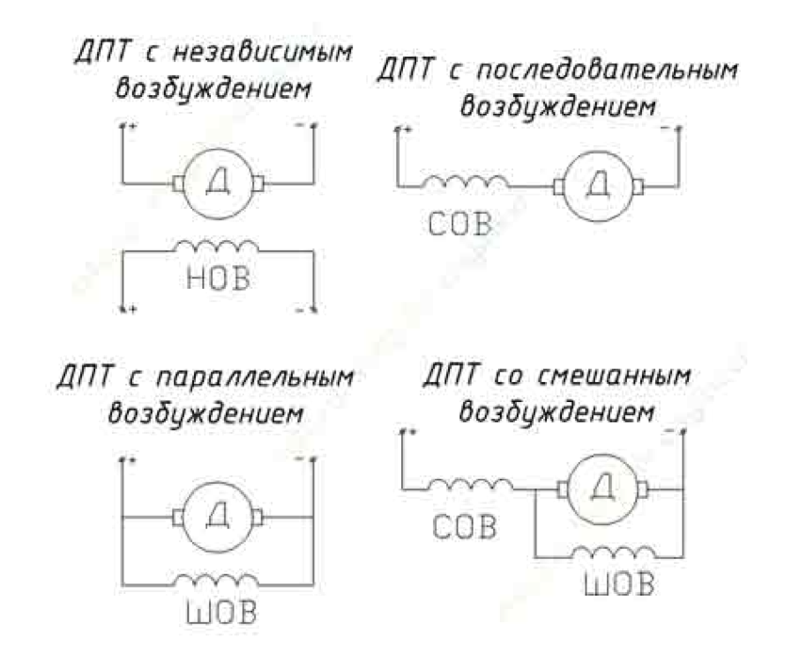
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.
Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции.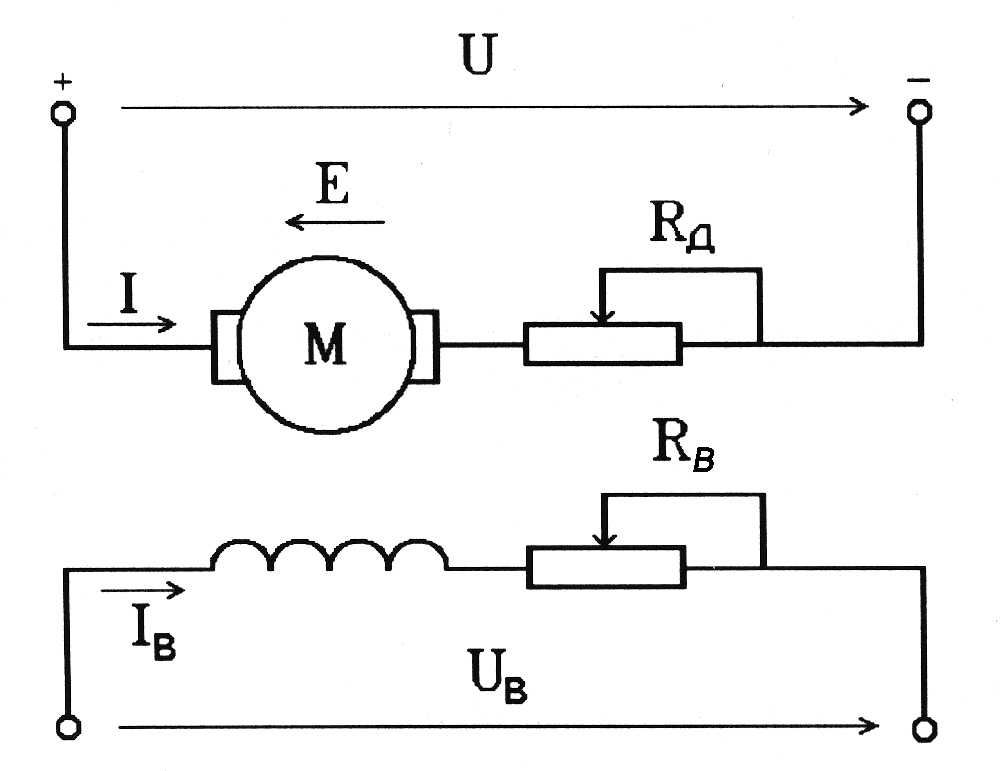 В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Электродвигатель постоянного тока 12 Вольт
На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач.
Электродвигатель постоянного тока П -11 С1 У4 работа
Двигатель постоянного тока (часть 1)
Электродвигатели постоянного тока
Оцените автора
Kак осуществляется пуск двигателя постоянного тока?
Схемы подключения электродвигателя постоянного тока
В зависимости от требуемых выходных характеристик электродвигателя постоянного тока, его подключение может быть осуществлено по одной из принципиальных схем: подключение с независимым, последовательным, параллельным или смешанным типом возбуждения. Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Схематическое изображение типов подключения электродвигателя постоянного тока представлено на иллюстрации, при этом каждый из типов подключения привносит свои особенности в эксплуатацию механизма.
Подключение с независимым возбуждением
При использовании такой схемы подключения обмотка возбуждения подключается напрямую к независимому источнику. При использовании такой схемы подключения общие характеристики электродвигателя станут идентичны двигателю, работающему на постоянных магнитах. Регулировка скорости вращения осуществляется с помощью сопротивления, возникающего в якорной цепи, или же при помощи реостата – регулировочного сопротивления в цепи обмотки возбуждения. При этом следует отметить, что при регулировке реостатом важно следить за величиной сопротивления в цепи обмотки: при сильном уменьшении этого значения (а также при обрыве) токи якоря резко возрастают, достигая опасных величин. При использовании для подключения схемы независимого возбуждения запрещается запуск электродвигателя на холостом ходу или при дефиците валовой нагрузки: такие действие неминуемо приведут к резкому увеличению скорости вращения и повреждению механизма.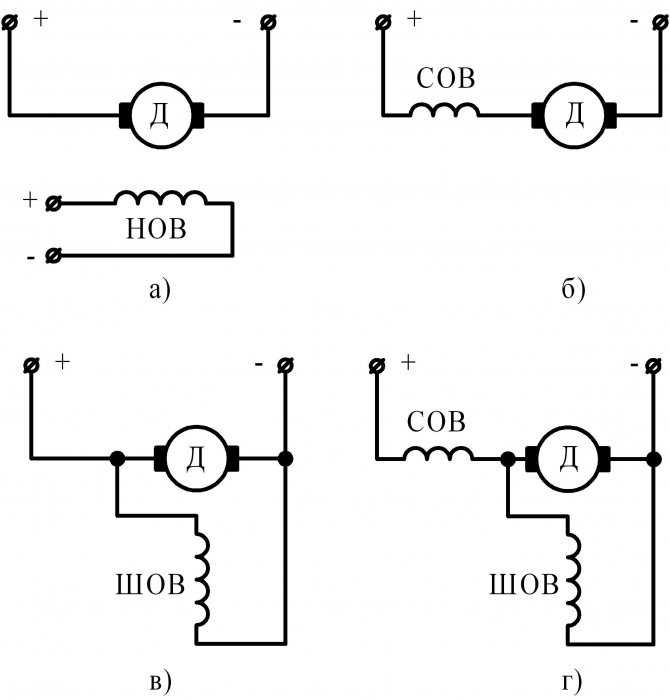
Подключение с параллельным возбуждением
При использовании такого типа подключения подключение обмоток ротора и возбуждение происходит параллельно, к единому источнику питания. Таким образом, при включении электродвигателя в сеть на ротор подаётся большее количество тока, чем на обмотку возбуждения, благодаря чему выходные характеристики параллельно подключённого двигателя постоянного тока позволяют использовать их в приводах станков и прочего промышленного оборудования. Скорость вращения регулируется реостатами в цепи ротора.
Подключение с последовательным возбуждением
При использовании такого типа подключения якорная обмотка и обмотка возбуждения используют один ток, а их включение осуществляется попеременно. Скорость и нагрузка в двигателе постоянного тока, подключённом по последовательной схеме, прямо пропорциональны друг другу. Запуск на холостом ходу запрещён. Благодаря хорошим пусковым характеристикам, обеспечиваемым подключением с последовательным возбуждением, двигатели постоянного тока, подключённые по такой схеме, широко применяются в электротранспорте.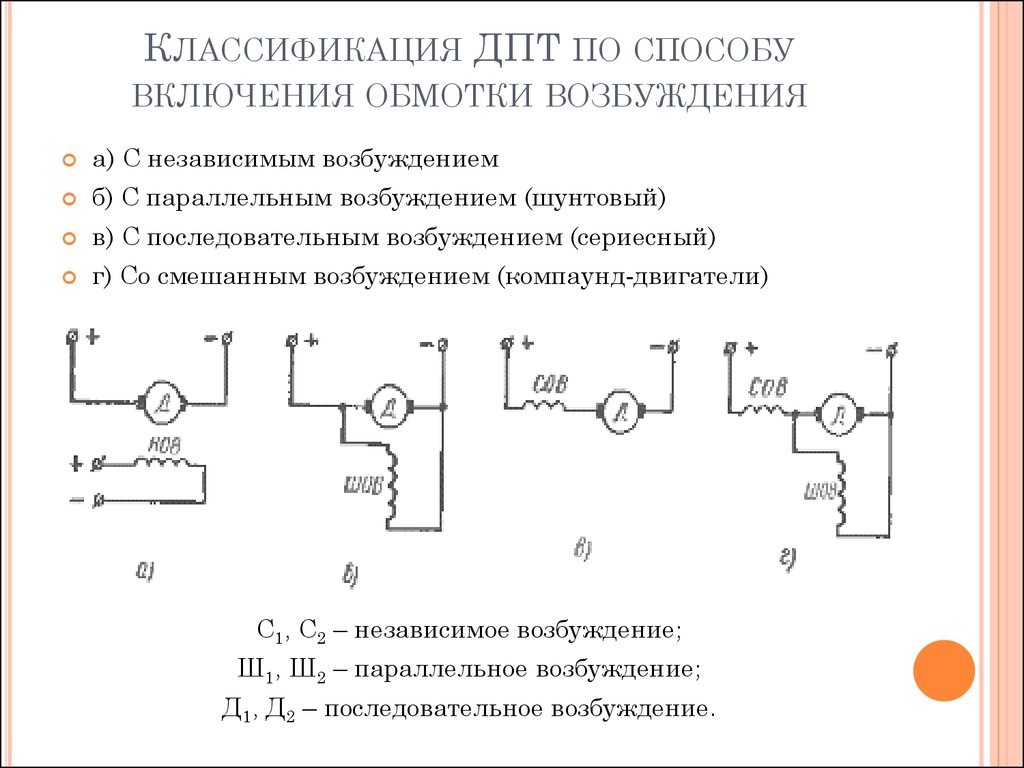
Подключение со смешанным возбуждением
Применение схемы смешанного возбуждения при подключении электродвигателя постоянного тока используются две попарно расположенные на полюсах двигателя обмотки возбуждения. Здесь существуют два варианта подключения: потоки будут либо складываться, либо вычитаться. В первом случае особенности работы электродвигателя будут аналогичны подключению по схеме последовательного возбуждения, во втором – параллельного.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему.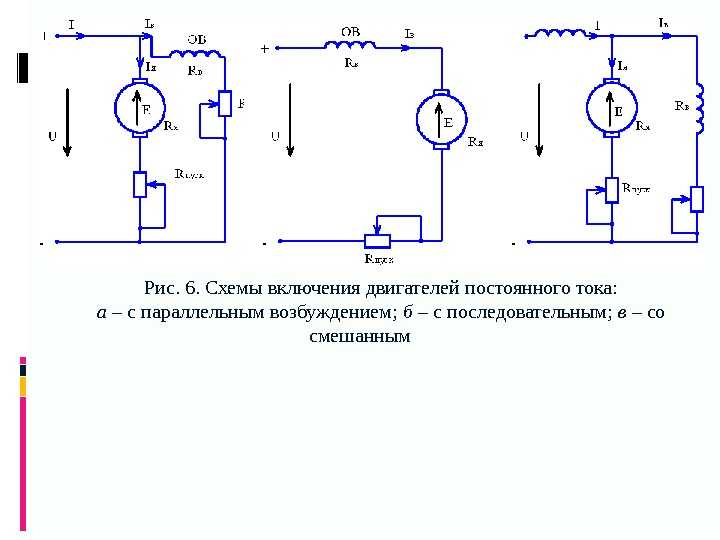 Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.

Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Пуск двигателя постоянного тока. Пусковые характеристики
В соответствии с уравнением равновесия моментов Mэм = M0 + Mн + J(dω/dt)
условием пуска двигателя является неравенство Мп >Мст. Если это условие выполняется, то при включении двигателя в сеть ротор приходит в движение и разгоняется до установившегося режима. Ввиду того, что ротор обладает моментом инерции, разгоняется он не мгновенно – нарастание скорости происходит по закону, близкому к экспоненте. Пуск двигателя постоянного тока осложняется тем, что при ω=0 ЭДС Eя=0 и пусковой ток якоря Iяп= Uя/ Rя может в 10 – 20 раз превышать номинальный ток, что опасно как для двигателя (усиление искрения, динамические перегрузки), так и для источника питания. Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.
Поэтому важнейшими показателями пускового режима являются кратность пускового тока Kiп= Iп/ Iном и кратность пускового момента Кмп= Мп/ Мном. При пуске необходимо обеспечить требуемую кратность пускового момента при возможно меньшей кратности пускового тока. Прямой пуск применяют обычно при кратности пускового тока K iп?6. При большем значении Kiп применяют способы пуска, обеспечивающие снижение тока Iяп либо за счет подачи пониженного напряжения на обмотку якоря, либо за счет введения добавочного сопротивления в цепь якоря. Первый способ применяется в основном при работе двигателей в системах автоматического регулирования с якорным способом управления. Второй способ, называемый реостатным, распространен наиболее широко в нерегулируемом приводе. Сопротивление пускового реостата Rп= Rд (см. рис. 5.19) выбирают таким, чтобы ограничить Iяп до (1,4 – 1,8) Iя.ном у двигателей средней мощности и до (2,0 – 2,5) Iя.ном у двигателей малой мощности. По мере разгона якоря ток якоря уменьшается и пусковой реостат постепенно выводится.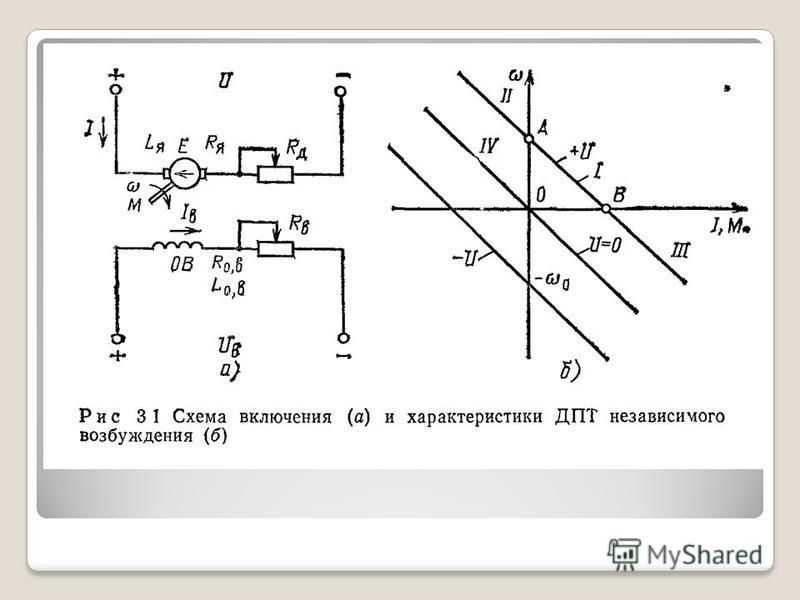
№23. Законы электромеханики
Первый Закон
Электромеханическое преобразование энергии не может осуществляться с коэффициентом полезного действия 100%.
Электромеханические преобразователи – сложные преобразователи, в которых преобразование электрической энергии (Рэл) в механическую ( Рмех) и обратно происходит с обязательным выделением тепловой энергии ( Рт). В каждой машине имеются потери в стали, обмотках, механические потери. По этой причине КПД всегда меньше 100%. Для электрической машины КПД можно определить как отношение полезной мощности к мощности, подводимой к электрической машине.
Для генератора
Для двигателя
Второй закон
Все электрические машины обратимы, ᴛ.ᴇ. одна и та же машина может работать в режимах двигателя и генератора. Обратимость электрической машины – основное отличие электромеханического преобразователя (ЭП) от других преобразователей.
Работа в режимах двигателя и генератора – важнейшее преимущество ЭП, обеспечившее широкое применение электрических машин в промышленности.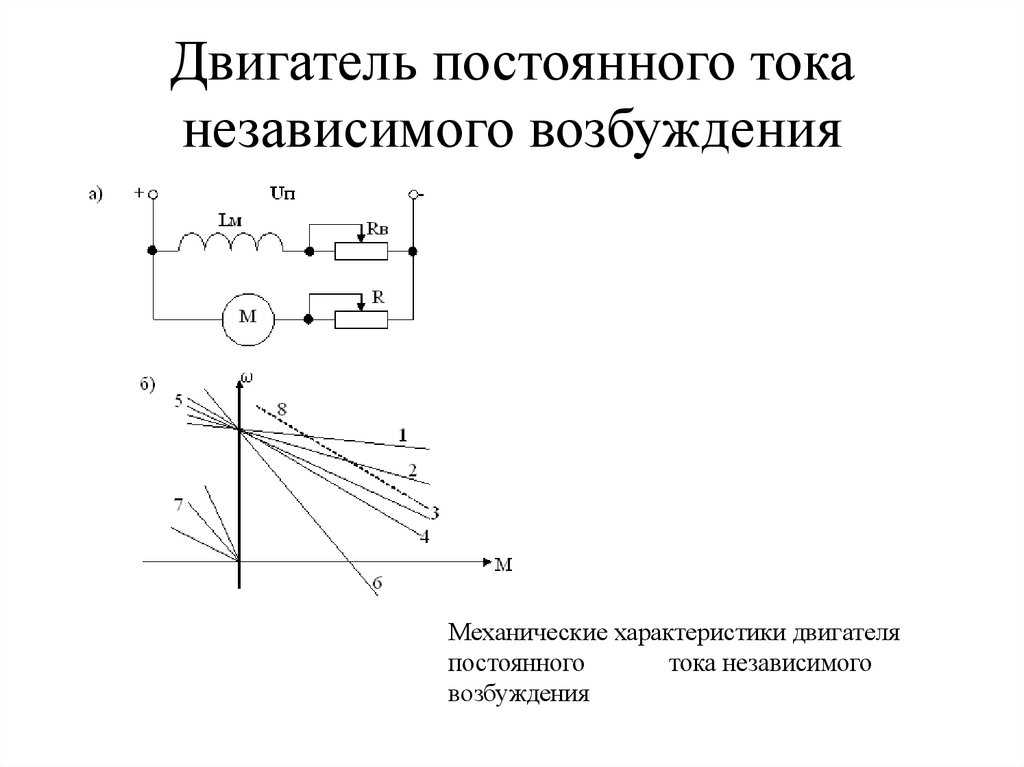
В режиме генератора активная мощность забирается с вала машины и преобразуется в электрическую, в режиме двигателя – поступает из сети и преобразуется в механическую. При этом реактивная мощность, идущая на создание магнитного поля, может ʼʼпоступатьʼʼ или ʼʼотдаватьсяʼʼ в сеть независимо от режима работы ЭП.
В трансформаторах энергия магнитного поля концентрируется, в основном, в магнитопроводе, а в генераторах и двигателях – в воздушном зазоре – пространстве между ротором и статором. Можно утверждать, что там и происходит электромеханическое преобразование энергии.
Третий закон
Электромеханическое преобразование энергии осуществляется полями, неподвижными относительно друг друга. Результирующее поле в машине создается полями статора и ротора.
Ротор может вращаться с той же скоростью, что и поле, или с другой скоростью, однако поля ротора и статора в установившемся режиме неподвижны относительно друг друга.
Угловая скорость ротора
Угловая скорость поля ротора относительно ротора , угловая скорость поля ротора относительно неподвижного статора , где — угловая скорость поля статора, — угловая скорость ротора.
Электромагнитный момент , где Рэ – электромагнитная мощность или мощность, сконцентрированная в магнитном поле в воздушном зазоре машины.
Поля, перемещающиеся относительно друг друга, не создают электромагнитного момента͵ а создают только поток тепловой энергии.
№24
Шаг 1-й: Узнать характеристики нагрузки.
Применительно к однофазным электродвигателям, нагрузки разделяются на 3 категории: стабильный момент силы, внезапно изменяющийся момент силы и момент силы, который изменяется постепенно, через определённые промежутки времени.
Шаг 2-й. Рассмотрим мощность.
Главное правило выбора мотора по мощности: нужно выбирать электродвигатель именно той мощности, какой нужно и стараться избегать её превышения или занижения.
Шаг 3-й. Запуск.
Также необходимо учитывать силу инерции, особенно вовремя процедуры пуска.
Шаг 4: Регулировка в течение цикла работы.
Циклом работы называется совокупность пошаговых операций, выполняемых мотором, в которые входят старт, работа в обычном режиме и остановка.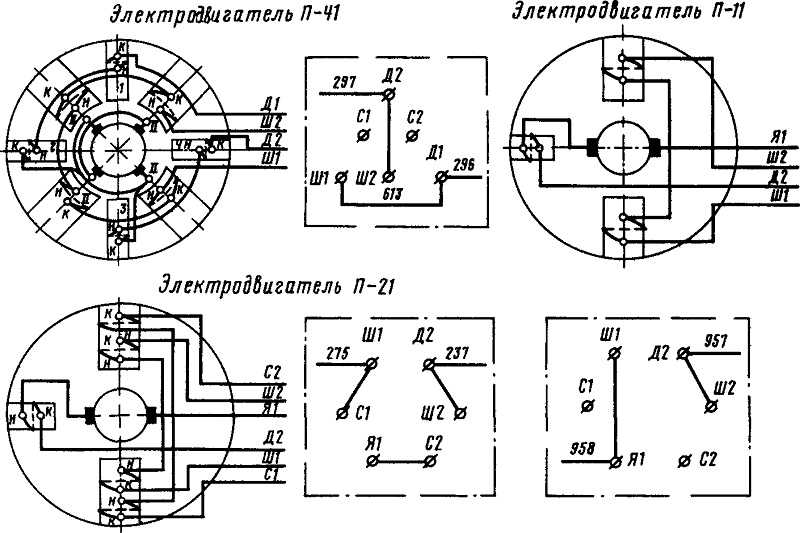
Шаг 5-й: Последний критерий выбора мотора, гипоксия.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
I = U/Rобм, где
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза.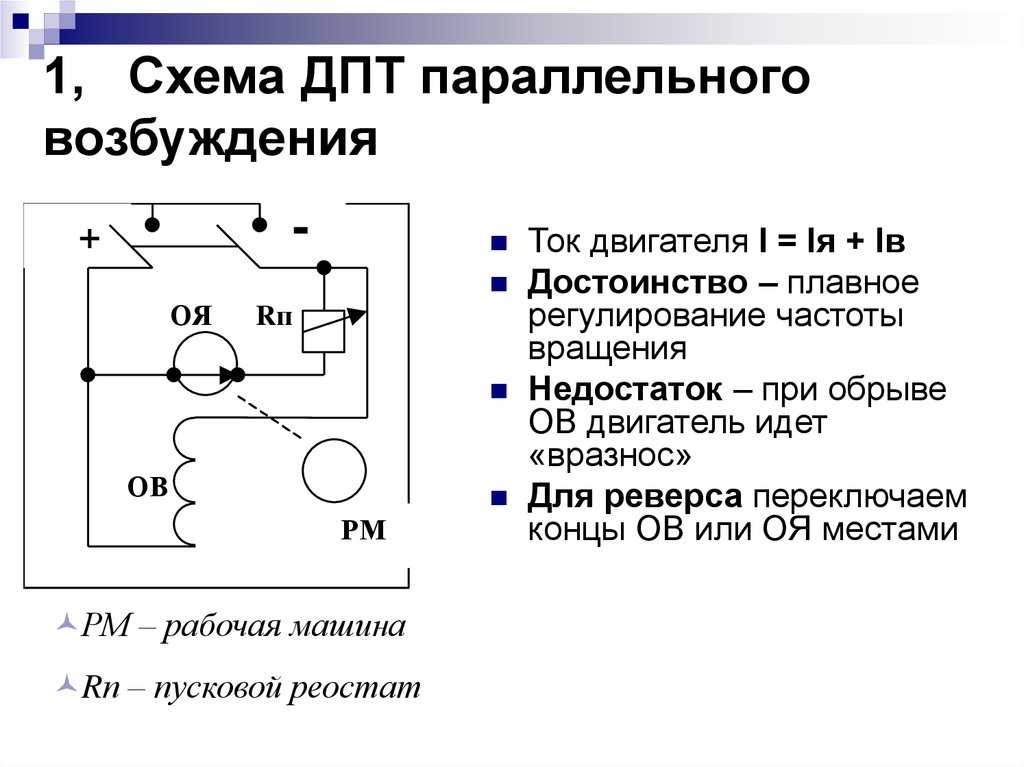 После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
I = (U — Eпрот)/Rобм
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина.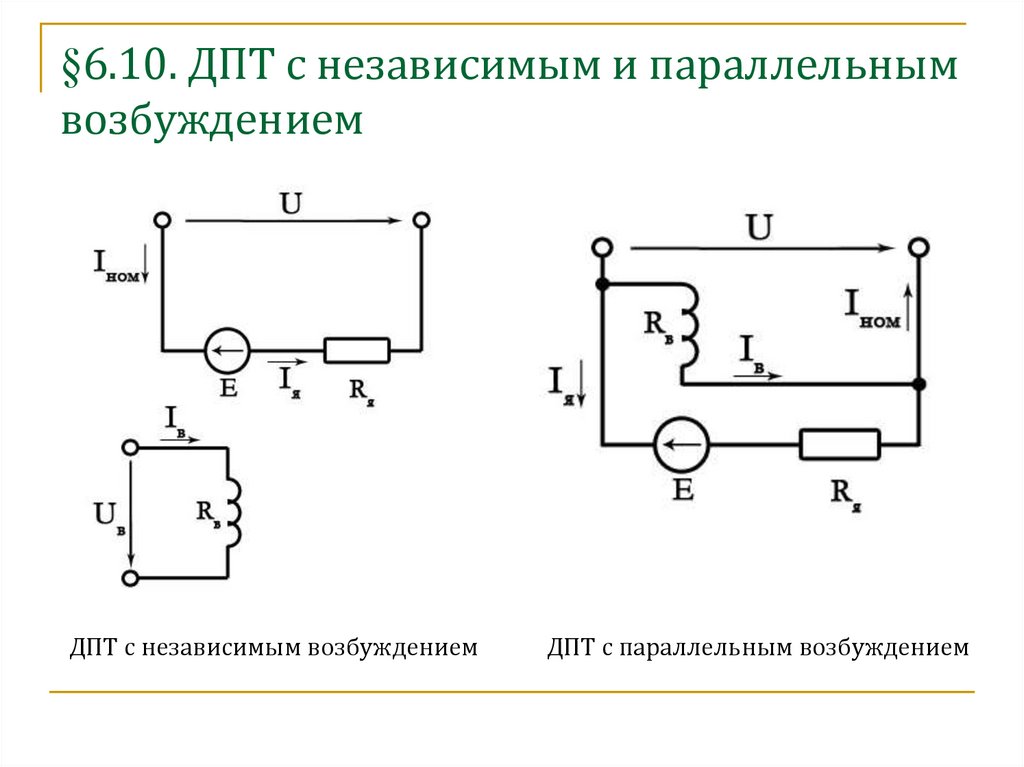 Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т.е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Применение двух пускателей в реверсивном устройстве
Схема управления асинхронным двигателем такого типа, по сути, работает таким же образом, как и предыдущая. Основное отличие здесь заключается в том, что появляется возможность при необходимости изменять направление вращения ротора. Чтобы это осуществить, необходимо изменить работающие фазы, имеющиеся на обмотке статора. К примеру, если нажать на кнопку «Пуск» КМ1, то порядок рабочих фаз будет А-В-С. Если же включить устройство со второй кнопки, то есть с КМ2, то порядок работающих фаз сменится на противоположный, то есть С-В-А.
Таким образом получается, что для управления асинхронным двигателем схемой такого типа необходимо две кнопки «Пуск», одна кнопа «Стоп» и два пускателя.
При нажатии на первую кнопку, которая в схеме обычно обозначается как SB2, произойдет включение первого контактора и вращение ротора в одну из сторон. Если возникает необходимость смены направления вращения на противоположную, необходимо нажать на «Стоп», после чего запуск двигателя осуществляется кнопкой SB3 и включением в работу второго контактора. Другими словами, чтобы использовать данную схему, необходимо промежуточное нажатие на кнопку остановки.
Так как управление работой двигателя с такой схемой усложняется, возникает необходимость в дополнительной защите. В данном случае речь идет об эксплуатации в пускателе нормально-закрытых (размыкающих) контактов. Они необходимы для того, чтобы обеспечить защиту от одновременного нажатия на обе кнопки «Пуск». Их нажатие без остановки приведет к возникновению короткого замыкания. Дополнительные контакты в таком случае препятствуют одновременному включению обоих пускателей. Это происходит из-за того, что при одновременном нажатии один из них включится на секунду позже второго. За это время первый контактор успеет разомкнуть свои контакты.
За это время первый контактор успеет разомкнуть свои контакты.
Советуем изучить — Краткий конспект на тему «припои и флюсы, применяемые при пайке»
Недостаток управления электрическим двигателем с такой схемой заключается в том, что пускатели должны обладать большим количеством контактов или же контактными приставками. Любой из этих двух вариантов не только усложняет всю электрическую конструкцию, но еще и удорожает ее сборку.
Сфера применения
Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах.
Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения.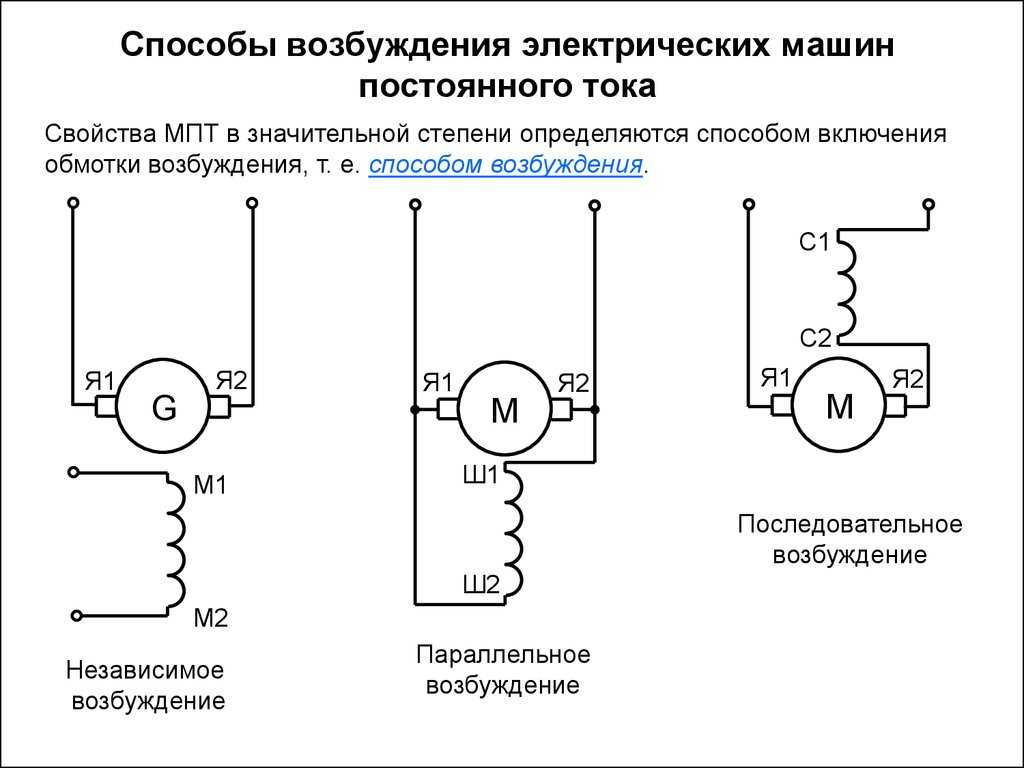 С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается.
Самый простой щёточно-коллекторный узел
Схемы управления электроприводами
Cхема электропривода холодильной фреоновой установки На рис.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов.
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя. На выходе логической схемы включены командные реле, которые подают команды в схему управления электроприводами механизмов автоматического штабелера. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2.
Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления. Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
См. также: Электролаборатория регистрация
Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
Советуем изучить — Сто 70238424.27.100.059-2009 ветроэлектростанции (вэс). условия создания. нормы и требования
При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Также рекомендуем прочесть
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Одновременно НО контакт реле РП сигнализирует на диспетчерский пункт. Для его ускорения ванну печи поворачивают относительно оси на 40 влево и вправо и в каждом из крайних положений производят проплавле-ние новых колодцев, что в конечном итоге приводит к обвалу шихты в печи и ускорению наиболее тяжелого с энергетической точки зрения режима расплавления шихты. При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения. Как читать Элекрические схемы
Подключение электродвигателя постоянного тока
Несмотря на то, что электродвигатели постоянного тока не так популярны, как устройства, работающие на переменном токе, сфера их применения довольно широка: они используются в быту, в качестве элементов различного наземного транспорта, а также на предприятиях в приводах элементов, бесперебойное электроснабжение которых осуществляется аккумуляторными батареями. Именно поэтому на сайте торгового дома Степмотор представлен широкий ассортимент устройств такого типа. Отличительной особенностью электродвигателей постоянного тока является наличие обмоток возбуждения, при этом от того, каким образом они будут подключены к сети, напрямую зависят пусковые характеристики, механические и электрические свойства двигателя.
Кнопочный пост
Данное оборудование предназначается для коммутации, то есть соединения цепей, в которых протекает переменный ток с максимальным напряжением в 660 В и частотой 50 или 60 Гц. Можно эксплуатировать такие устройства и в сетях с постоянным током, но тогда максимальное рабочее напряжение ограничивается 440 В. Возможно применение даже в качестве пульта управления.
Советуем изучить — Наведенное напряжение
Обычный кнопочный пост имеет следующие особенности своей конструкции:
- Каждая из его кнопок лишена фиксации.
- Имеется кнопка «Пуск», которая чаще всего имеет не только зеленый цвет, но и контакты нормально-разведенного типа. Некоторые модели даже обладают подсветкой, которая включается после нажатия. Предназначение — введение в работу какого-либо механизма.
- «Стоп» — это кнопка, обладающая красным цветом (чаще всего). Располагается она на замкнутых контактах, а ее основное предназначение — это отключение какого-либо прибора от источника питания с целью остановки его работы.
- Отличие между некоторыми приборами состоит в материале, который используется для изготовления каркаса. Он может быть сделан из металла или пластмассы. В данном случае корпус играет важную роль, так как имеет определенную степень защиты, зависящую от материала.
Какие существуют схемы подключения электродвигателей постоянного тока
В домашнем хозяйстве редко встретишь мотор, работающий на постоянном токе. Зато они всегда устанавливаются в детских игрушках, которые летают, ездят, шагают и т.д. Всегда они стоят в автомобилях: в различных приводах и вентиляторах. В электротранспорте чаще всего используют тоже их.
Другими словами, применяются двигатели постоянного тока там, где требуется достаточно широкий диапазон регулирования скорости и точность ее поддержания.
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Частота вращения – одна из важнейших его характеристик. Ее регулировать можно тремя способами: изменяя поток возбуждения, изменяя величину подводимого напряжения к двигателю, изменяя сопротивление в якорной цепи.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.
Торможение электрического двигателя постоянного тока
Для торможения электроприводов с ДПТ также есть три варианта: торможение противовключением, динамическое и рекуперативное. Первое происходит за счет изменения полярности тока в обмотке якоря и напряжения. Второе происходит благодаря замыканию накоротко (через резистор) обмотки якоря. Электрический двигатель при этом работает как генератор, преобразуя в электрическую, запасенную им механическую энергию, которая выделяется в виде тепла. Это торможение сопровождается мгновенной остановкой двигателя.
Последнее происходит, если электрический мотор, включенный в сеть, вращается со скоростью, которая выше скорости холостого хода. ЭДС обмотки двигателя в этом случае, превышает значение напряжении я в сети, что приводит к изменению на противоположное направление тока в обмотке мотора, т. е. двигатель отдает в сеть энергию, переходя в режим генератора. Одновременно возникает тормозной момент на валу.
Преимущества двигателей постоянного тока
Сравнивая их с асинхронными моторами, нужно отметить отличные пусковые качества, высокую (до 3000 об/мин) частоту вращения, а также хорошую регулировку. Из недостатков отметить можно? Сложность конструкции, низкую надежность, высокую стоимость и затраты на ремонт и обслуживание.
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.
Принципиальные схемы ДПТ
Двигатель переменного тока подключается просто, в отличие от ДПТ. Обычно у таких двигателей высокой и средней мощности имеются отдельные выводы в клеммной коробке (от обмотки и якоря). На якорь обычно подается полное напряжение, а на обмотку — ток, регулировать который можно реостатом или напряжением переменным. От величины тока, имеющегося на обмотке возбуждения, прямопропорционально зависят обороты двигателя переменного тока.
В зависимости от того, какая используется схема подключения электродвигателя постоянного тока, двигатель электрический может быть постоянного тока, разделяют на самовозбуждающиеся и с независимым возбуждением (от отдельного источника).
Схема для подключения двигателя с возбуждением параллельным
Она аналогична предыдущей, но не имеет отдельного источника питания.
Когда требуется большой пусковой ток, применяют двигатели с возбуждением последовательным: в городском электротранспорте (троллейбусах, трамваях, электровозах).
Токи обоих обмоток в этом случае одинаковы. Недостаток – требуется постоянная нагрузка на вал, поскольку при ее уменьшении на 25%, резко увеличивается частота вращения и происходит отказ двигателя.
Есть еще моторы, которые крайне редко используются — со смешанным возбуждением. Их схема представлена ниже.
Электродвигатель постоянного тока с параллельным возбуждением
Под понятием «возбуждение» понимают создание в электрических машинах магнитного поля, которое необходимо, чтобы заработал двигатель. Схем возбуждения несколько:
- С независимым возбуждением (питание обмотки происходит от постороннего источника).
- Электродвигатель постоянного тока с параллельным возбуждением (источник питания обмотки возбуждения и якоря включены параллельно) – шунтовые.
- С последовательным возбуждением (обе обмотки включены последовательно) – сериесные.
- Со смешанным возбуждением – компаундные.
Бесщеточные моторы
Но, двигатель со щетками, которые быстро изнашиваются и приводят к искрению, не может использоваться там, где необходима высокая надежность, поэтому среди электротранспорта (электровелосипедов, скутеров, мотоциклов и электромобилей) наибольшее применение нашли бесщеточные электродвигатели. Они отличаются высоким КПД, невысокой стоимостью, хорошей удельной емкостью, длительным сроком службы, малыми размерами, бесшумной работой.
Работа этого двигателя основывается на взаимодействии магнитных полей электромагнита и постоянного. Когда за окном 21 век, а вокруг полно мощных и недорогих проводников, логично заменить механический инвертор цифровым, добавить датчик положения ротора, решающий в какой момент на конкретную катушку необходимо подать напряжение, и получить бесщеточный электродвигатель постоянного тока. В качестве датчика чаще используется датчик Холла.
Поскольку в этом двигателе удалены щетки, он не нуждается в регулярном обслуживании. Управляется двигатель постоянного тока при помощи блока управления, позволяющего изменять частоту вращения вала мотора, стабилизировать на определенном уровне обороты (независимо от имеющейся на валу нагрузки).
Состоит блок управления из нескольких узлов:
- Системы импульсно-фазового управления СИФУ.
- Регулятора
- Защиты.
Где купить электродвигатель
Многие компании с мировыми именами выпускают сегодня электродвигатель постоянного тока 220 В. Купить его можно в интернет — магазинах, менеджеры которых предоставят исчерпывающую онлайн информацию, касающуюся выбранной модели. Большой выбор моделей таких двигателей на сайте http://ru.aliexpress.com/w/wholesale-brushless-dc-motor.html, в каталоге которого можно ознакомиться со стоимостью моделей, их описанием и пр. Если даже в каталоге нет интересующего двигателя, можно заказать его доставку.
Двигатель постоянного тока: схемы включения ↓
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост:)
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим.
▌
Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится:)
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌
Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌
Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то:) Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + I я *R я
- U — напряжение подаваемое на якорь
- R я — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (R я +R д)
- I я — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка:)
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = С е * Ф * n
- C e — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет:)
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = С м * I я * Ф
С м — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n 0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага:) Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.
В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.
Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌
Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌
Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Все рабочие характеристики двигателя постоянного тока, как и генератора, зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным и, наконец, они могут быть независимы друг от друга.
Двигатели с параллельным возбуждением.
Здесь обмотка возбуждения и обмотка якоря соединены параллельно. Обмотка возбуждения имеет большее количество витков, чем обмотка якоря, поэтому ток обмотки возбуждения в большинстве случаев составляет несколько процентов от тока якоря. В цепь обмотки возбуждения может включаться регулировочный реостат. В цепь якоря включается пусковой реостат ПР.
Двигатель с независимым возбуждением.
Если обмотку возбуждения подключить к другому источнику постоянного напряжения, то получим двигатель с независимым возбуждением. Такими же свойствами обладают электродвигатели с постоянным магнитом.
Скоростная характеристика двигателей с независимым и параллельным возбуждением – это зависимость n
= f (Iя) при U = const и Iе = const, где
n — скорость
Iя — ток якоря
Iе — ток возбуждения.
Рис.8.5.4. Скоростная характеристика.
Изменение скорости вращения может происходить за счёт изменения нагрузки и магнитного потока. Увеличение тока нагрузки незначительно изменяет внутреннее падение напряжения из-за малого сопротивления цепи якоря и поэтому лишь незначительно уменьшает скорость вращения двигателя. Что же касается магнитного потока, то вследствие реакции якоря при увеличении тока нагрузки он несколько уменьшается, что приводит к незначительному увеличению скорости двигателя. Таким образом, скорость вращения двигателя с параллельным возбуждением изменяется очень мало. Скорость вращения двигателя определяется формулой:
n = (U – IяRя) / c∙Φ, где
c – коэффициент, зависящий от устройства машины.
Скорость вращения двигателя с независимым возбуждением можно
регулировать либо изменением сопротивления в цепи якоря, либо изменением
магнитного потока. Следует отметить, что чрезмерное уменьшение тока возбуждения
и, особенно, случайный обрыв этой цепи очень опасны для двигателей с
параллельным и независимым возбуждением, т. к. ток в якоре может возрасти до
недопустимо больших значений. При небольшой нагрузке (или на холостом ходу)
скорость может настолько возрасти, что станет опасной для целостности
двигателя.
Двигатель с последовательным возбуждением.
У такого двигателя ток якоря является одновременно и током возбуждения, т.к. обмотка возбуждения включена последовательно с якорем. По этой причине магнитный поток двигателя изменяется с изменением нагрузки. Скорость двигателя:
n =[ U – Iя (Rя + Rв)] / c∙Φ, где
Rя – сопротивление якоря
Rв – сопротивление обмотки возбуждения.
Скоростная характеристика двигателя посл. возбуждения.
На этом графике представлена скоростная характеристика двигателя последовательного возбуждения.
Из этой характеристики видно, что скорость двигателя сильно
зависит от нагрузки. При увеличении нагрузки увеличивается падение на
сопротивлении обмоток при одновременном увеличении магнитного потока, что
приводит к значительному уменьшению скорости вращения. Поэтому такие двигатели
не следует пускать вхолостую или с малой нагрузкой. Двигатели с
последовательным возбуждением применяют в тех случаях, когда необходим большой
пусковой момент или способность выдерживать кратковременные перегрузки. Они
используются в качестве тяговых двигателей в трамваях, троллейбусах, метро и
электровозах, а также на подъёмных кранах и для пуска двигателей внутреннего
сгорания (стартеры).
Двигатель со смешанным возбуждением.
На каждом полюсе такого двигателя имеются две обмотки – параллельная и последовательная. Их можно включить так, чтобы магнитные потоки складывались (согласное включение) или вычитались (встречное включение). Формулы для скорости вращения и вращающего момента для такого двигателя:
n = (U – Iя ∙ Rя) / c∙(Φпарал. +/- Φпосл.)
М = c ∙ Iя ∙ (Φпарал. +/- Φпосл.)
В зависимости от соотношения магнитных потоков двигатель со
смешанным возбуждением по своим свойствам приближается либо к двигателю с
последовательным возбуждением, либо к двигателю с параллельным возбуждением.
Как правило, у таких двигателей последовательная обмотка является главной
(рабочей), а параллельная – вспомогательной. Благодаря наличию магнитного
потока параллельной обмотки, скорость такого двигателя не может сильно
возрастать на малых нагрузках. Двигатели с согласным включением применяются,
когда необходим большой пусковой момент и регулировка скорости при переменных
нагрузках. Двигатели со встречным включением обмоток применяются в тех случаях,
когда необходима постоянная скорость при изменяющейся нагрузке.
Для изменения направления вращения двигателя постоянного
тока надо изменить направление тока либо в обмотке возбуждения, либо в обмотке
якоря
. Изменением полярности на клеммах машины можно поменять направление
вращения только в двигателе с постоянным магнитом или независимым
возбуждением. В других двигателях надо изменить направление тока либо в якорной
обмотке, либо в обмотке возбуждения. Двигатель постоянного тока нельзя
включать подсоединением полного напряжения
.
Пусковой ток машин
постоянного тока где-то в 20 раз превышает номинальный ток (он тем больше, чем
больше и быстрее мотор). В больших машинах пусковой ток может превышать
номинальный ток в 50 раз.
Большой ток вызывает в коллекторе круговое искрение и разрушает коллектор. Для включения применяют плавное увеличение напряжения или пусковые реостаты. Прямое включение допускается при низких напряжениях в случае маленьких двигателей, у которых сопротивление обмотки якоря большое.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Рисунок 1 — схема параллельного возбуждения машины постоянного тока
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Рисунок 2 — схема независимого возбуждения машины постоянного тока
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Рисунок 3 — схема последовательного возбуждения машины постоянного тока
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
Рисунок 4 — схема смешанного возбуждения машины постоянного тока
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Cтраница 1
Двигатель постоянного тока независимого возбуждения, скорость вращения которого регулируется напряжением на якоре.
Двигатели постоянного тока независимого возбуждения используются в механизмах ЭТУ в тех случаях, когда необходимо глубокое регулирование скорости при высоком качестве переходных процессов.
Двигатель постоянного тока независимого возбуждения питается через две группы тиратронов. Одна пара TI и Г3 служит для питания обмотки якоря, вторая пара Т3 я Т — для питания обмотки возбуждения.
Двигатели постоянного тока независимого возбуждения применяются, главным образом там, где по условиям работы требуется глубокое и плавное регулирование скорости, а также в тех случаях, когда необходима работа привода с низкой скоростью.
Для двигателей постоянного тока независимого возбуждения при постоянной величине магнитного потока ф фном момент пропорционален току, поэтому можно пользоваться эквивалентным моментом.
Для двигателя постоянного тока независимого возбуждения — это скорость идеального холостого хода, определяемая соотношением f / max / C, для гидропривода — скорость, развиваемая исполнительным органом при полном открытии каналов в распределителе, полном использовании давления питания и отсутствии силы сопротивления.
| Принципиальная схема присоединения реле противовключения.| Характеристики напряжения на реле противовключения для разных точек присоединения реле (двигатель постоянного тока независимого возбуждения. |
Для двигателя постоянного тока независимого возбуждения величины U , R и Ф постоянны; поэтому для данной точки присоединения реле, когда Rx также постоянно, зависимость Upn — f (w) линейна.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением магнитного потока как в двигательном, так и в генераторном режимах представляет собой однозонное регулирование вверх. Поскольку номинальное значение магнитного потока является наибольшим, то изменение потока возможно лишь в сторону уменьшения по сравнению с номинальным. Последнее приводит к увеличению скорости двигателя во всех режимах работы.
Двигатели постоянного тока в зависимости от способов их возбуждения, как уже отмечалось, делятся на двигатели с независимым
, параллельным
(шунтовым), последовательным
(сериесным) и смешанным (компаундным) возбуждением.
Двигатели независимого возбуждения , требуют два источника питания (рис.11.9,а). Один из них необходим для питания обмотки якоря (выводы Я1 и Я2 ), а другой — для создания тока в обмотке возбуждения (выводы обмотки Ш1 и Ш2 ). Дополнительное сопротивление Rд в цепи обмотки якоря необходимо для уменьшения пускового тока двигателя в момент его включения.
С независимым возбуждением выполняются в основном мощные электрические двигатели с целью более удобного и экономичного регулирования тока возбуждения. Сечение провода обмотки возбуждения определяется в зависимости от напряжения ее источника питания. Особенностью этих машин является независимость тока возбуждения, а соответственно и основного магнитного потока, от нагрузки на валу двигателя.
Двигатели с независимым возбуждением по своим характеристикам практически совпадают с двигателями параллельного возбуждения.
Двигатели параллельного возбуждения
включаются в соответствии со схемой, показанной на рис. 11.9,б. Зажимы Я1
и Я2
относятся к обмотке якоря, а зажимы Ш1
иШ2
— к обмотке возбуждения (к шунтовой обмотке). Переменные сопротивления Rд
и Rв
предназначены соответственно для изменения тока в обмотке якоря и в обмотке возбуждения. Обмотка возбуждения этого двигателя выполняется из большого количества витков медного провода сравнительно малого сечения и имеет значительное сопротивление. Это позволяет подключать ее на полное напряжение сети, указанное в паспортных данных.
Особенностью двигателей этого типа является то, что при их работе запрещается отсоединять обмотку возбуждения от якорной цепи . В противном случае при размыкании обмотки возбуждения в ней появится недопустимое значение ЭДС, которое может привести к выходу из строя двигателя и к поражению обслуживающего персонала. По той же причине нельзя размыкать обмотку возбуждения и при выключении двигателя, когда его вращение еще не прекратилось.
С увеличением частоты вращения добавочное (дополнительное) сопротивление Rд в цепи якоря следует уменьшать, а при достижении установившейся частоты вращения – вывести полностью.
Рис.11.9. Виды возбуждения машин постоянного тока,
а — независимого возбуждения, б — параллельного возбуждения,
в — последовательного возбуждения, г — смешанного возбуждения.
ОВШ — обмотка возбуждения шунтовая, ОВС — обмотка возбуждения сериесная,» ОВН — обмотка независимого возбуждения, Rд -дополнительное сопротивление в цепи обмотки якоря, Rв- дополнительное сопротивление в цепи обмотки возбуждения.
Отсутствие дополнительного сопротивления в обмотке якоря в момент пуска двигателя может привести к появлению большого пускового тока, превышающего номинальный ток якоря в 10…40 раз .
Важным свойством двигателя параллельного возбуждения служит практически постоянная его частота вращения при изменении нагрузки на валу якоря. Так при изменении нагрузки от холостого хода до номинального значения частота вращения уменьшается всего лишь на (2.. 8)% .
Второй особенностью этих двигателей служит экономичное регулирование частоты вращения, при котором отношение наибольшей скорости к наименьшей может составлять 2:1
, а при специальном исполнении двигателя — 6:1
. Минимальная частота вращения ограничивается насыщением магнитной цепи, которое не позволяет уже увеличивать магнитный поток машины, а верхний предел частоты вращения определяется устойчивостью машины — при значительном ослаблении магнитного потока двигатель может пойти «вразнос» .
Двигатели последовательного возбуждения
(сериесные) включаются по схеме, (рис.11.9, в). Выводы С1
и С2
соответствуют сериесной (последовательной) обмотке возбуждения. Она выполняется из сравнительно малого числа витков в основном медного провода большого сечения. Обмотка возбуждения соединяется последовательно с обмоткой якоря
. Дополнительное сопротивление Rд
в цепи обмоток якоря и возбуждения позволяет уменьшить пусковой ток и производить регулирование частоты вращения двигателя. В момент включения двигателя оно должно иметь такую величину, при которой пусковой ток будет составлять (1,5…2,5)Iн
. После достижения двигателем установившейся частоты вращения дополнительное сопротивление Rд
выводится, то есть устанавливается равным нулю.
Эти двигатели при пуске развивают большие пусковые моменты вращения и должны запускаться при нагрузке не менее 25% ее номинального значения. Включение двигателя при меньшей мощности на его валу и тем более в режиме холостого хода не допускается . В противном случае двигатель может развить недопустимо большие обороты, что вызовет выход его из строя . Двигатели этого типа широко применяются в транспортных и подъемных механизмах, в которых необходимо изменять частоту вращения в широких пределах.
Двигатели смешанного возбуждения
(компаундные), занимают промежуточное положение между двигателями параллельного и последовательного возбуждения (рис.11.9, г). Большая принадлежность их к тому или другому виду зависит от соотношения частей основного потока возбуждения, создаваемых параллельной или последовательной обмотками возбуждения. В момент включения двигателя для уменьшения пускового тока в цепь обмотки якоря включается дополнительное сопротивление Rд
. Этот двигатель обладает хорошими тяговыми характеристиками и может работать в режиме холостого хода.
Прямое (безреостатаное) включение двигателей постоянного тока всех видов возбуждения допускается мощностью не более одного киловатта.
Обозначение машин постоянного тока
В настоящее время наиболее широкое распространение получили машины постоянного тока общего назначения серии 2П и наиболее новой серии 4П. Кроме этих серий выпускаются двигатели для крановых, экскаваторных, металлургических и других приводов серии Д. Изготавливаются двигатели и специализированных серий .
Двигатели серий 2П
и 4П
подразделяются по оси вращения, как это принято для асинхронных двигателей переменного тока серии4А
. Машины серии2П
имеют 11 габаритов, отличающихся по высоте вращения оси от 90 до 315 мм. Диапазон мощностей машин этой серии составляет от 0,13 до 200 кВт для электрических двигателей и от 0,37 до 180 кВт для генераторов. Двигатели серий 2П и 4П рассчитываются на напряжение 110, 220, 340 и 440 В. Их номинальные частоты вращения составляют 750, 1000, 1500,2200 и 3000 об/мин.
Каждый из 11 габаритов машин серии 2П имеет станины двух длин (М и L ).
Электрические машины серии 4П имеют лучшие некоторые технико — экономические показатели по сравнению с серией 2П . трудоемкость изготовления серии 4П по сравнению с 2П снижена в 2,5…3 раза. При этом расход меди снижается на 25…30 %. По ряду конструктивных особенностей, в том числе по способу охлаждения, по защите от атмосферных воздействий, по использованию отдельных деталей и узлов машины серии 4П унифицированы с асинхронными двигателями серии 4А иАИ .
Обозначение машин постоянного тока (как генераторов, так и двигателей) представляется следующим образом:
ПХ1Х2ХЗХ4 ,
где 2П — серия машины постоянного тока;
XI — исполнение по типу защиты: Н — защищенное с самовентиляцией, Ф — защищенное с независимой вентиляцией, Б — закрытое с естественным охлаждением, О — закрытое с обдувом от постороннего вентилятора;
Х2 — высота оси вращения (двухзначное или трехзначное число) в мм;
ХЗ — условная длина статора: М — первая, L — вторая, Г — с тахогенератором;
В качестве примера можно привести обозначение двигателя 2ПН112МГУ
— двигатель постоянного тока серии 2П
, защищенного исполнения с самовентиляцией Н
,112
высота оси вращения в мм, первый размер статораМ
, укомплектован тахогенератором Г
, используется для умеренного климатаУ
.
По мощностям электрические машины постоянного тока условно могут быть подразделены на следующие группы :
Микромашины …………………………меньше 100 Вт,
Мелкие машины ………………………от 100 до 1000 Вт,
Машины малой мощности…………..от 1 до 10 кВт,
Машины средней мощности………..от 10 до 100 кВт,
Крупные машины……………………..от 100 до 1000 кВт,
Машины большой мощность……….более 1000 кВт.
По номинальным напряжениям электрические машины подразделяются условно следующим образом:
Низкого напряжения…………….меньше 100 В,
Среднего напряжения ………….от 100 до 1000 В,
Высокого напряжения……………выше 1000В.
По частоте вращения машины постоянного тока могут быть представлены как:
Тихоходные…………….менее 250 об/мин.,
Средней скорости………от 250 до 1000 об/мин.,
Быстроходные………….от 1000 до 3000 об/мин.
Сверхбыстроходные…..выше 3000 об/мин.
Задание и методика выполнения работы.
1.Изучить устройство и назначение отдельных частей электрических машин постоянного тока.
2.Определить выводы машины постоянного тока, относящиеся к обмотке якоря и к обмотке возбуждения.
Выводы, соответствующие той или иной обмотке, могут быть определены мегомметром, омметром или с помощью электрической лампочки. При использовании мегомметра один его конец присоединяется к одному из выводов обмоток, а другим поочередно касаются к остальным. Измеренное сопротивление, равное нулю, укажет на соответствие двух выводов одной обмотки.
3.Распознать по выводам обмотку якоря и обмотку возбуждения. Определить вид обмотки возбуждения (параллельного возбуждения или последовательного).
Этот опыт можно осуществить с помощью электрической лампочки, подключаемой последовательно с обмотками Постоянное напряжение следует подавать плавно, постепенно повышая его до указанного номинального значения в паспорте машины.
С учетом малого сопротивления якорной обмотки и обмотки последовательного возбуждения лампочка загорится ярко, а их сопротивления, измеренные мегомметром (или омметром) будут практически равны нулю.
Лампочка, соединенная последовательно с параллельной обмоткой возбуждения, будет гореть тускло. Значение сопротивления параллельной обмоткой возбуждения должно находиться в пределах 0,3…0,5 кОм .
Выводы якорной обмотки можно распознать путем присоединения одного конца мегомметра к щеткам, касаясь при этом другим его концом к выводам обмоток на щитке электрической машины.
Выводы обмоток электрической машины следует обозначить на изображенной в отчете условной этикетке выводов.
Измерить сопротивления обмоток и сопротивление изоляции. Сопротивление обмоток можно измерить по схеме амперметра и вольтметра. Сопротивление изоляции между обмотками и обмотками относительно корпуса проверяется мегомметром, рассчитанным на напряжение 1 кВ. Сопротивление изоляции между обмоткой якоря и обмоткой возбуждения и между ними и корпусом должно быть не ниже 0,5 МОм . Данные замеров отобразить в отчете.
Изобразить условно в поперечном разрезе главные полюсы с обмоткой возбуждения и якорь с витками обмотки, находящимися под полюсами (подобно рис. 11.10). Самостоятельно принять направление тока в обмотках возбуждения и якоря. Указать при этих условиях направление вращения двигателя.
Рис. 11.10. Двухполюсная машина постоянного тока:
1 — станина; 2 -якорь; 3 — главные полюсы; 4 — обмотка возбуждения; 5 — полюсные наконечники; 6 — обмотка якоря; 7 — коллектор; Ф — основной магнитный поток; F — сила, действующая на проводники обмотки якоря.
Контрольные вопросы и задания для самостоятельной подготовки
1: Объяснить устройство и принцип действия двигателя и генератора постоянного тока.
2. Пояснить назначение коллектора машин постоянного тока.
3.Дать понятие полюсного деления и привести выражение для его определения.
4.Назвать основные виды обмоток, применяемых в машинах постоянного тока, и знать способы их выполнения.
5.Указать основные достоинства двигателей параллельного возбуждения.
6.Каковы конструктивные особенности обмотки параллельного возбуждения по сравнению с обмоткой последовательного возбуждения?
7. В чем особенность пуска двигателей постоянного тока последовательного возбуждения?
8.Сколько параллельных ветвей имеют простая волновая и простая петлевая обмотки машин постоянного тока?
9.Как обозначаются машины постоянного тока? Привести пример обозначения.
10.Какой величины допускается сопротивление изоляции между обмотками машин постоянного тока и между обмотками и корпусом?
11.Какой величины может достигнуть ток в момент пуска двигателя при отсутствии дополнительного сопротивления в цепи обмотки якоря?
12.Какой величины допускается пусковой ток двигателя?
13.В каких случаях допускается пуск двигателя постоянного тока без дополнительного сопротивления в цепи обмотки якоря?
14.За счет чего можно изменить ЭДС генератора независимого возбуждения?
15.Каково назначение дополнительных полюсов машины постоянного тока?
16.При каких нагрузках допускается включение двигателя последовательного возбуждения?
17.Чем определяется величина основного магнитного потока?
18. Написать выражения ЭДС генератора и момента вращения двигателя. Дать понятие входящих в них составляющих.
ЛАБОРАТОРНАЯ РАБОТА 12.
32. Основные схемы включения дпт. Независимое возбуждение
Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден.
Схема независимого возбуждения
Остальные схемы называют схемами с самовозбуждением.
Параллельное возбуждение
Обмотки
ротора и возбуждения подключаются
параллельно к одному источнику питания.
При таком включении ток через обмотку
возбуждения в несколько раз меньше, чем
через ротор. Характеристики электродвигателей
получаются жесткими, позволяющие
использовать их для привода станков,
вентиляторов.
Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения.
Схема параллельного возбуждения
Последовательное возбуждение
Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте.
Схема последовательного возбуждения
Смешанное возбуждение
При
этой схеме используются две обмотки
возбуждения, расположенные попарно на
каждом из полюсов электродвигателя. Их
можно подключить так, чтобы потоки их
либо складывались, либо вычитались. В
результате двигатель может иметь
характеристики как у схемы последовательного
или параллельного возбуждения.
Схема смешанного возбуждения
Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений
33. Характеристика дпт с независимым возбуждением.
Двигатель
постоянного тока независимого возбуждения
(ДПТ НВ) В этом двигателе (рисунок 1)
обмотка возбуждения подключена к
отдельному источнику питания. В цепь
обмотки возбуждения включен регулировочный
реостат rрег,
а в цепь якоря — добавочный (пусковой)
реостат Rп. Характерная
особенность ДПТ НВ — его ток
возбуждения Iв не
зависит от тока якоря Iя так
как питание обмотки возбуждения
независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Рисунок 1
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из
этого уравнения следует, что механические
характеристики двигателя постоянного
тока независимого возбуждения (ДПТ НВ)
прямолинейны и пересекают ось ординат
в точке холостого хода n0 (рис
13.13 а), при этом изменение частоты
вращения двигателя Δn,
обусловленное изменением его механической
нагрузки, пропорционально сопротивлению
цепи якоря Rа =∑R +
Rдоб.
Поэтому при наименьшем сопротивлении
цепи якоря Rа =
∑R,
когда Rдоб =
0,
соответствует наименьший перепад
частоты вращения Δn.
При этом механическая характеристика
становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При
оценке регулировочных свойств двигателей
постоянного тока наибольшее значение
имеют механические характеристики n
= f(M).
При неизменном моменте нагрузки на валу
двигателя с увеличением сопротивления
резистора Rдоб частота
вращения уменьшается. Сопротивления
резистора Rдоб для
получения искусственной механической
характеристики, соответствующей требуемой
частоте вращения n при
заданной нагрузке (обычно номинальной)
для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота
вращения холостого хода n0 представляет
собой пограничную частоту
вращения, при превышении которой
двигатель переходит в генераторный
режим.
Эта частота вращения превышает
номинальную nном на
столько, на сколько номинальное
напряжение Uном подводимое
к цепи якоря, превышает ЭДС якоря Ея
ном при
номинальной нагрузки двигателя.
откуда:
На
форму механических характеристик
двигателя влияет величина основного
магнитного потока возбуждения Ф.
При уменьшении Ф (при
возрастании сопротивления резистора rpeг)
увеличивается частота вращения холостого
хода двигателя n0 и
перепад частоты вращения Δn.
Это приводит к значительному изменению
жесткости механической характеристики
двигателя (рис. 13.13, б). Если же изменять
напряжение на обмотке якоря U (при
неизменных Rдоб и
Rрег),
то меняется n0,
a Δn остается
неизменным [см. (13.10)]. В итоге механические
характеристики смещаются вдоль оси
ординат, оставаясь параллельными друг
другу (рис. 13.13, в). Это создает наиболее
благоприятные условия при регулировании
частоты вращения двигателей путем
изменения напряжения U,
подводимого к цепи якоря. Такой метод
регулирования частоты вращения получил
наибольшее распространение еще и
благодаря разработке и широкому
применению регулируемых тиристорных
преобразователей напряжения.
Типы двигателей [подробно] — 4QD
Существует несколько типов электродвигателей, в которых используются щетки для постоянного тока. операция.
- Двигатели с постоянными магнитами
Имеют два провода. Изменение полярности приложенного напряжения меняет направление вращения. - Двигатели с параллельным возбуждением
Имеют 4 провода. Одна пара (якорь) низкоомная, другая — более высокоомная. - Серийная рана.
Может иметь два или четыре провода. Двухпроводной тип нельзя поменять местами. - Двигатели с комбинированной обмоткой.
Это тип двигателя с питанием от возбуждения, в котором могут варьироваться как возбуждение, так и арматура.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами обычно имеют только два провода (хотя у некоторых их 4), а их корпус, как правило, достаточно магнитен, чтобы притягивать скрепки для бумаги и т. д., из-за случайной утечки от полевых магнитов. Изменение полярности соединений якоря изменит направление вращения. Однако не все двигатели с постоянными магнитами должным образом реверсивны. Некоторые из них изготавливаются для оптимальной работы только в одном направлении.
В двигателе с питанием от возбуждения часть мощности двигателя тратится впустую, возбуждая обмотку возбуждения (следовательно, возбуждение от возбуждения), тогда как в двигателе с постоянными магнитами обмотка возбуждения отсутствует, поскольку магнитное поле создается постоянными магнитами, а не электрическим током . Следовательно, для работы от батареи лучше всего подходят двигатели с постоянными магнитами, поскольку их эффективность теоретически выше, чем у двигателей с возбуждением от возбуждения. Современные двигатели с постоянными магнитами также обычно меньше двигателей с возбуждением от поля, потому что современные магниты меньше, чем обмотки, необходимые для создания эквивалентного поля.
Двигатель с постоянными магнитами имеет фиксированную максимальную скорость, которая зависит от подаваемого на него напряжения (именно так регулятор скорости изменяет скорость, изменяя напряжение, подаваемое на двигатель). Если двигатель вращается быстрее этой максимальной скорости, он пытается стать генератором (если позволяет контроллер), и генерируемая мощность действует на торможение двигателя. Таким образом, двигатели с постоянными магнитами идеально подходят для транспортных средств с ограниченными возможностями, детских автомобилей, багги для гольфа, моделей локомотивов и аналогичных транспортных средств, где скорость должна постоянно контролироваться, а расчетная максимальная скорость транспортного средства не должна превышаться. Двигатели постоянного тока могут не подходить для открытых дорожных транспортных средств, где идеалом является достижение максимальной скорости при спуске с намерением использовать инерцию для подъема на следующий холм, хотя ограничения скорости на дороге скорее портят эту форму энергосбережения!
Для реверсирования двигателя с постоянными магнитами необходимо изменить направление тока якоря либо с помощью сильноточного переключателя или реле, либо с помощью подходящего контроллера.
Двигатели с параллельным возбуждением
Двигатели с параллельным возбуждением обычно имеют 4 провода. Два подключаются к полю (относительно) с высоким сопротивлением, а два подключаются к якорю с гораздо более низким сопротивлением.
В двигателе с параллельным возбуждением напряжение батареи подключается через обмотку возбуждения. Постоянный ток (равный напряжению батареи, деленному на сопротивление обмотки возбуждения) протекает в обмотке возбуждения, превращая ее в электромагнит. Эти двигатели ведут себя точно так же, как двигатель с постоянными магнитами, но с заменой постоянного магнита электромагнитом. Обычно обмотку возбуждения выводят отдельно от якоря, поэтому двигатель имеет четыре провода. С помощью омметра вы можете проверить, что на самом деле есть две обмотки: с высоким сопротивлением (поле) и с низким сопротивлением (якорь). Для управления скоростью подключите обмотку возбуждения непосредственно к батарее и управляйте якорем от контроллера, как если бы вы использовали двигатель с постоянными магнитами.
Реверс
Самый простой способ реверсирования двигателя — использовать двухполюсный переключатель для реверсирования соединений с обмоткой возбуждения. Поскольку обмотка возбуждения потребляет гораздо меньший ток, чем якорь, требуется только слаботочный переключатель. Конечно, как и в случае с любым двигателем, вы никогда не должны менять направление во время работы двигателя. Конечно, вы можете использовать обычный реверсивный контроллер (например, нашу серию DNO) и использовать управление якорем, при этом поле постоянно подключено к аккумулятору, или вы можете использовать привод стояночного тормоза для включения и выключения поля для экономии заряда батареи. Привод стояночного тормоза рассчитан на токи возбуждения до одного ампера.
Или вы можете использовать реверсивный контроллер и реверсировать якорь. В этом случае может быть удобно выбрать контроллер с парковочным драйвером, который можно использовать для возбуждения поля либо напрямую, либо через реле. Это обесточит поле, когда двигатель остановится, что продлит срок службы батареи.
Скорость двигателя
Напряженность магнитного поля поля пропорциональна протекающему в нем току. Если вы уменьшите напряжение возбуждения поля, то вы уменьшите ток возбуждения. Теперь, когда двигатель вращается, якорь прорезает магнитное поле, создавая напряжение, которое имеет тенденцию противодействовать приложенному напряжению (поэтому оно называется обратной ЭДС или электродвижущей силой). Величина обратной ЭДС пропорциональна не только скорости, но и напряженности магнитного поля. Если уменьшить напряжение возбуждения, то якорь должен пройти быстрее , чтобы дать ту же обратную ЭДС с уменьшенным полем. Таким образом, вы получаете любопытный эффект: если вы уменьшаете напряжение якоря, двигатель работает медленнее (как и следовало ожидать), но если вы уменьшаете поле, двигатель ускоряется.
Двигатели с последовательной обмоткой
Реверсивный Двигатели с последовательной обмоткой обычно имеют 4 провода. Два на арматуру и два на поле. Обе обмотки будут иметь низкое сопротивление, и с помощью омметра их будет трудно отличить друг от друга! Реверсирование соединений либо с полем, либо с якорем приведет к реверсированию двигателя.
Существуют двигатели с двухпроводной последовательной обмоткой, такие как обычный автомобильный стартер. Они необратимы без серьезной модификации двигателя, и даже в этом случае они нехороши!
В двигателе с последовательным возбуждением ток якоря протекает через обмотку возбуждения, которая является сильноточной обмоткой, включенной последовательно с якорем.
Это последовательное соединение дает двигателю с последовательным возбуждением характеристики, сильно отличающиеся от двигателей с постоянными магнитами и двигателей с параллельным возбуждением. В частности, вы не можете получить ни рекуперативное торможение, ни точное регулирование скорости с двигателем с последовательной обмоткой. Скорость двигателя не определяется и не измеряется обратной ЭДС: она сильно зависит от нагрузки.
Рекуперативное торможение
Чтобы получить регенерацию, вам необходимо поддерживать магнитное поле, когда ток якоря проходит через ноль. Затем, когда противо-ЭДС якоря уменьшится ниже приложенного управляющего напряжения, ток якоря изменится на противоположное (если это позволяет контроллер).
Но вы не можете сделать это с простым двигателем с последовательным возбуждением, так как магнитное поле падает до нуля, когда ток якоря (поля) уменьшается до нуля. Таким образом, при нулевом токе якоря противоэдс нет, поэтому ток никогда не может измениться!
Торможение штекером
Если вы переключаете полярность катушки возбуждения, то направление привода меняется на противоположное, и вы можете получить торможение штекером, которое часто бывает прерывистым и всегда неэффективным. Но ток, подаваемый контроллером, по-прежнему положительный (привод) и не реверсировался, как это необходимо для регенерации. Все, что происходит, это то, что мощность, подаваемая контроллером, используется для уменьшения кинетической энергии нагрузки, а вся мощность (подаваемая контроллером и получаемая за счет потери КЕ) просто рассеивается в виде тепла в двигателе.
Универсальный режим
Однако из-за этого последовательного соединения двигатель с последовательным возбуждением будет работать одинаково от сети переменного тока. или постоянный ток По этой причине их иногда называют «универсальными» двигателями. Чтобы реверсировать такой двигатель, вы не можете просто изменить ток якоря, но вы должны использовать сильноточный двухполюсный переключатель или реле для реверсирования либо якоря, либо полевого соединения. Это нормально, если двигатель был разработан для реверса, но это непрактично с чем-то вроде автомобильного стартера, поскольку с ним вы не можете легко разделить возбуждение и якорь.
Максимальная скорость
Одной из особенностей двигателей с последовательной обмоткой является то, что они не имеют теоретической максимальной скорости: по мере увеличения скорости якоря ток уменьшается. При этом магнитное поле уменьшается. По мере уменьшения поля двигатель должен вращаться быстрее, чтобы обеспечить ту же обратную ЭДС. По мере того, как ток уменьшается до нуля, идеальный двигатель будет становиться все быстрее и быстрее, чтобы обеспечить бесконечную максимальную скорость при нулевой нагрузке. К счастью, идеальных двигателей не существует, и всегда есть остаточное магнитное поле и трение. Тем не менее, некоторые ранние тяговые двигатели имели неприятную привычку разгоняться до разрушения, если приводной вал ломался. Это избыточное число оборотов также является причиной использования двигателей с комбинированной обмоткой, где дополнительное поле с шунтирующей обмоткой обеспечивает постоянное поле для ограничения уменьшения поля и ограничения максимальной скорости.
Эта особенность двигателя с серийной обмоткой делает его, вероятно, хорошим выбором для транспортных средств с открытым верхом, где ограниченная максимальная скорость не так желательна, и где вы хотите набрать обороты при спуске с одного холма, чтобы подняться на следующий. Однако, когда вы запускаете двигатель с последовательной обмоткой на низкой скорости с небольшой механической нагрузкой, он становится очень неэффективным. Автомобильный стартер, работающий таким образом, может потреблять 35 ампер и вообще ничего не делать. Поэтому управление низкой скоростью может быть проблемой.
Контроллеры
Можно использовать контроллеры 4QD с двигателями с последовательной обмоткой: серия Porter подходит напрямую, но вам придется установить собственное реверсивное устройство в соответствии с линиями, показанными на этой схеме.
- На схеме показано, как якорь и возбуждение могут быть соединены с помощью двухполюсного реверсивного переключателя с этими контроллерами. Это может переключаться либо на якорь, либо на обмотку возбуждения, но здесь показано в якоре. Эта схема подходит для следующих контроллеров;
- Porter 5 и 10.
- Uni 4 и 8, заменены на Porter 5 и 10.
- 1QD и 2QD, устарели.
- Можно также использовать серию 4QD. У нас есть примечания по применению, в которых объясняется метод (и некоторые проблемы).
- Контроллеры серии VTX. Их можно относительно легко изменить так, чтобы бортовые реле управляли реверсом. Инструкция по применению доступна на сайте.
- Серии Pro-120 и Pro-150 и ДНО. Теоретически модификация для них такая же, как и для серии VTX, но из-за их конструкции это не очень практично.
Диод маховика
Обратите внимание на дополнительный диод, подключенный к обмотке возбуждения. Обычно вы можете обойтись без этого диода, но для достижения наилучших результатов он должен присутствовать. Причина в том, что обмотки якоря и обмотки возбуждения имеют разную индуктивность, поэтому ток в каждой из них будет уменьшаться с разной скоростью. Дополнительный диод позволяет току возбуждения «делать свое дело» независимо от тока якоря. Номинальный ток этого диода будет зависеть от двигателя, но он не будет сильно нагреваться, так как проводит только небольшую часть цикла переключения.
К счастью, теоретически есть способ решить проблемы с двигателем с последовательной обмоткой: использовать два контроллера, один для управления полем, а второй для управления якорем. Контроллер поля должен быть настроен на подачу тока в поле. Этот контроллер не меняется, а просто подает на поле постоянный ток возбуждения. Преимущество состоит в том, что ток возбуждения может быть установлен для максимального КПД двигателя. Второй контроллер управляет якорем, и теперь двигатель будет работать точно так же, как если бы он был двигателем с постоянными магнитами, обеспечивая рекуперативное торможение и реверсирование от якоря.
К сожалению, у нас нет информации по данному вопросу, и мы не можем предоставить дополнительную информацию. Если вы хотите это сделать, вы действительно сами по себе, но если вы хотите поделиться подробностями, возможно, мы можем написать заметку для других.
Автомобильные стартеры
Многим этот двигатель кажется легкодоступным. Но на самом деле они не являются хорошими двигателями для обычного использования, и мы действительно не можем рекомендовать их использование ни при каких обстоятельствах . Тем не менее, они могут быть удовлетворительными, но если вы используете не совсем подходящий контроллер и просите нас о подходящем контроллере, не удивляйтесь, если мы не сможем вам помочь! Шелкового кошелька не сделаешь и т. п., а стартеры вообще квалифицируются как «свиные уши»! Добавление контроллера к неисправному двигателю может сработать, но мы не можем сказать, что это что-то вылечит, поэтому вы используете такую комбинацию на свой страх и риск.
Проблема в том, что они рассчитаны на очень сильное прерывистое использование (очень низкий рабочий цикл). Им требуется большой ток, чтобы создать достаточное поле даже для того, чтобы заставить их работать — только для того, чтобы они начали вращаться, вам нужно пропустить около 35-40 ампер через стартер. Для получения сколько-нибудь разумного крутящего момента нужно 80-100 ампер, что их быстро перегреет. В автомобиле при нормальном использовании они потребляют около 200 ампер в течение нескольких секунд запуска. Это нормально для периодического использования, но не в течение длительного времени, так как двигатель быстро перегревается и перегорает. Такая конструкция делает стартер непрактичным для любого использования в качестве обычного двигателя.
Если вы опытный инженер (но тогда зачем вам это?), стартер можно оптимизировать путем полного капитального ремонта: убедитесь, что подшипники очень свободны, а коллектор и щетки находятся в оптимальном состоянии, чтобы свести к минимуму трение.
Стартеры также имеют последовательную обмотку (хотя некоторые из более поздних двигателей имеют постоянные магниты, к которым эти комментарии неприменимы), поэтому они не регенерируются. Также очень сложно переподключить их, чтобы разделить поле (необходимо обратить их вспять) — поэтому их невозможно обратить вспять.
Названия и адреса производителей низковольтных двигателей постоянного тока с постоянными магнитами
Двигатели со смешанной обмоткой
Двигатели со смешанной обмоткой представляют собой тип двигателя с питанием от возбуждения, который разработан для специального двойного контроллера. И поле, и якорь регулируются для изменения скорости и крутящего момента.
Таким образом, они обладают большинством характеристик двигателя с параллельным возбуждением, но со значительными улучшениями за счет более сложного контроллера.
Двигатели с комбинированной обмоткой встречаются относительно редко, и 4QD не поставляет контроллеры для этих двигателей.
Как подключить контроллер скорости или направления вращения двигателя? |HUIMULTD
Местоположение: Главная > Информация
ВВЕДЕНИЕ:
Контроллер электродвигателя MGR можно разделить на контроллер направления электродвигателя MGR и регулятор скорости вращения электродвигателя MGR. Контроллер направления двигателя MGR представляет собой своего рода твердотельное реле DPDT, которое может использоваться для замены сложных систем электромагнитных реле и напрямую использовать цифровые сигналы для управления вращением электродвигателя. Твердотельные реле управления скоростью двигателя постоянного тока MGR могут регулировать скорость двигателя постоянного тока, регулируя входную мощность двигателя постоянного тока.
Из этой статьи вы узнаете, как подключить контроллер электродвигателя MGR/mager? Как подключить реверсивный переключатель двигателя dpdt? Как подключить регулятор скорости двигателя постоянного тока?
Вы можете быстро перейти к интересующим вас главам с помощью каталога ниже и Quick Navigator в правой части браузера.
СОДЕРЖАНИЕ
| §1. Как подключить твердотельное реле с реверсивным двигателем переменного тока |
| §2. Как подключить твердотельное реле с реверсивным двигателем постоянного тока |
| §3. Как подключить твердотельное реле управления скоростью двигателя постоянного тока |
§1. Как подключить твердотельное реле реверсивного двигателя переменного тока
— Схема подключения контроллера направления двунаправленного двигателя переменного тока
1.1 Однофазное твердотельное реле реверсивного двигателя переменного тока
Серия MGR-1M
Твердотельное реле однофазного реверсивного двигателя переменного тока представляет собой однофазный переключатель прямого и обратного хода для электродвигателя переменного тока, который использует управляющий сигнал постоянного тока для управления однофазным двигателем переменного тока прямого и обратного хода. Входная цепь с тремя клеммами этого реле управления направлением однофазного двигателя переменного тока подключена к управляющему сигналу постоянного тока, две из этих клемм используются для управления вращением вперед и назад однофазного двунаправленного двигателя переменного тока. Выходная цепь с тремя клеммами однофазного переключателя прямого обратного хода переменного тока подключена к однофазному источнику питания переменного тока и однофазному двигателю переменного тока. Две клеммы однофазного реверсивного двигателя используются для управления вращением однофазного реверсивного электродвигателя переменного тока.
Твердотельное реле трехфазного переменного тока с реверсивным двигателем 1,2
Серия MGR-3M
Твердотельное реле трехфазного реверсивного двигателя переменного тока представляет собой трехфазный переключатель вперед и назад для электродвигателя переменного тока, который использует управляющий сигнал постоянного тока для управления трехфазным двигателем переменного тока вперед-назад. Входная цепь с тремя клеммами этого реле управления направлением трехфазного двигателя переменного тока подключена к управляющему сигналу постоянного тока, две из этих клемм используются для управления прямым и обратным вращением трехфазного двунаправленного двигателя переменного тока. Клеммы А1, В1, С1 выходной цепи реверсивного выключателя электродвигателя подключены к источнику питания трехфазного переменного тока; клеммы А2, В2, С2 подключаются к реверсивному электродвигателю трехфазного переменного тока.
§2. Как подключить твердотельное реле реверсивного двигателя постоянного тока
-Двунаправленный контроллер направления двигателя постоянного тока Схема подключения
Серия MGR-DHK
двигатель, который использует управляющий сигнал постоянного тока для управления двигателем постоянного тока вперед-назад. Четырехконтактная входная цепь этого реле управления направлением вращения двигателя постоянного тока подключена к управляющему сигналу постоянного тока. Эти клеммы управляющего сигнала разделены на U1 и U2, которые соответственно используются для управления прямым и обратным вращением двунаправленного двигателя постоянного тока. Выходная цепь этого переключателя реверса электродвигателя постоянного тока подключена к нагрузке постоянного тока и реверсивному двигателю постоянного тока. Полярность двух клемм, подключенных к реверсивному электродвигателю постоянного тока, можно поменять местами в соответствии с управляющим сигналом постоянного тока. Когда U1 включен, выходной ток течет от порта «+» к порту «-». Когда U2 включен, выходной ток течет от порта «(+)» к порту «(-)».
§3. Схема подключения регулятора постоянного тока
-Твердотельное реле управления скоростью двигателя постоянного тока
Серия MGR-DTSV
скорость электродвигателя постоянного тока. Входная цепь переключателя скорости тиристорного двигателя постоянного тока подключена к управляющему сигналу постоянного тока — КРАСНЫЙ кабель и СИНИЙ кабель обеспечивают питание для входной цепи; а КОРИЧНЕВЫЙ кабель, ЖЕЛТЫЙ кабель и ЗЕЛЕНЫЙ кабель регулируют скорость двигателя постоянного тока, управляя варистором. Выходная цепь регулятора скорости постоянного тока подключена к источнику питания постоянного тока.
УПРАВЛЕНИЕ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ
ЦЕЛИ:
• объяснить работу метода ускорения CEMF для двигателя постоянного тока.
• используйте элементарные схемы проводки, схемы проводки панели и внешнюю проводку диаграммы.
• объясните номиналы пусковых и защитных устройств.
• описывать принципы работы приводов с двигателем постоянного тока с регулируемой скоростью.
• укажите, как можно получить более высокие и более низкие скорости двигателя постоянного тока.
• перечислите преимущества приводов с двигателем постоянного тока с регулируемой скоростью.
• опишите, как твердотельные устройства могут заменить реостаты.
• сделать простые чертежи электроприводов постоянного тока.
• перечислить преимущества использования тиристоров.
Хотя ручные пускатели все еще используются, в большинстве промышленных применений используются
оборудование для автоматического управления двигателем, чтобы свести к минимуму возможность ошибок в
человеческий суд. Для установки и обслуживания оборудования автоматического управления двигателем,
электрик должен быть знаком с тремя видами электрических схем:
• принципиальные электрические схемы
• электрические схемы панели
• схемы внешней проводки
На электрической принципиальной схеме соединений используются символы и простой план связи для иллюстрации схемы управления и последовательности операций.
На схеме подключения панели показаны электрические соединения всех частей. панели контроллера и указывает на внешние соединения. Полный контроль элементы представлены символами, но расположены в тех же относительных позициях на схеме подключения, которую они фактически занимают на панели управления. Потому что из лабиринта проводов, показанного на схеме подключения панели, трудно используйте для устранения неполадок или для понимания работы контроллера.
По этой причине на электрической принципиальной схеме представлена последовательность
операций контроллера, а диаграмма панели используется для обнаружения проблем
и сбои в работе контроллера.
На схеме внешней проводки показана проводка от панели управления к двигателя и к кнопочным станциям. Эта диаграмма наиболее полезна для рабочего кто устанавливает кабелепровод и провода между панелью стартера и блоком управления панель и двигатель.
МЕТОД CEMF КОНТРОЛЯ УСКОРЕНИЯ ДВИГАТЕЛЯ
CEMF, создаваемая ротором, низкая в момент запуска двигателя. Как двигатель ускоряется, эта CEMF увеличивается. См. перепад напряжения в разделе «Пуск». Раздел «Ток и CEMF» в Руководстве 1. Напряжение на якоре двигателя можно использовать для включения реле, уменьшающих пусковое сопротивление при достигается необходимая скорость двигателя.
Защита от запуска и работы для контроллера CEMF
Защита от запуска контроллера CEMF обеспечивается предохранителями в двигателе.
фидер и ответвление цепи двигателя. Эти предохранители рассчитаны
в соответствии со статьей 430 Национального электротехнического кодекса.
Защита от работы контроллера, как определено в части III статьи NEC. 430, обеспечивается термоэлементом защиты от перегрузки, включенным последовательно с арматура. Тепловой элемент рассчитан на 115–125 % полной нагрузки якоря. Текущий. Как описано в NEC 430.32, если ток превышает процент номинальное значение тока якоря, тепло, выделяемое в тепловом элементе, вызывает биметаллическая планка для размыкания или срабатывания термоконтактов, которые подключены в цепь управления. Значение тока в период пуска двигателя не длится достаточно долго, чтобы нагреть термоэлемент в достаточной степени, чтобы вызвать его открыть.
ЦЕПЬ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ
Пуск двигателя постоянного тока
См. РИС. 1. Замкните главный сетевой выключатель, прежде чем нажимать кнопку пуска.
кнопка. После нажатия пусковой кнопки включается управляющее реле М.
Цепь управления теперь завершена от L1 до тепловой защиты от перегрузки (OL).
контакты 6-7, через контакты 7-8 кнопки пуска, и через нормально
замкнуть контакты кнопки останова 8-9 на L2. Нижние вспомогательные уплотнительные контакты
7-8 реле М также замыкают и шунтируют пусковую кнопку. В результате начало
кнопку можно отпустить, не прерывая работу.
РИС. 1 Элементарная схема контроллера постоянного тока CEMF.
При замыкании основных контактов 2-3 контактора М цепь якоря двигателя
комплектуется от L1 через контакты термоэлемента перегрузки 1-2, через
контакты 2-3 реле М, через пусковой резистор, и через якорь
ведет 4-5 к L2. Цепь шунтирующего возбуждения F1-F2 включена параллельно
цепь якоря. Контакты 3-4 контактора А CEMF остаются разомкнутыми при запуске
потому что высокий пусковой ток создает высокое падение напряжения на резисторе
3-4. Это оставляет лишь небольшое падение напряжения на якоре и контакторе А.
катушку, пока не будет достигнуто ускорение. По мере того, как CEMF распространяется на арматуру,
он действует как резистор, который снижает больший процент приложенного напряжения,
тем самым обеспечивая падение напряжения на катушке А и контактах А 3-4 близкое к
шунтирующий ток вокруг пускового резистора.
Подключение двигателя к линии
CEMF, создаваемая в якоре, прямо пропорциональна скорости двигатель.
По мере ускорения двигателя скорость приближается к нормальной полной скорости, и CEMF увеличивается до максимального значения. Реле А откалибровано для работы при примерно 80% от номинального напряжения.
При замыкании контактов 3-4 реле А пусковое сопротивление 3-4 шунтируется, и арматура подключена через линию.
Запуск защиты от перегрузки
Тепловое реле перегрузки содержит две цепи. Одна цепь включена последовательно с якорем и по ней течет ток якоря. через термодатчик или нагревательный элемент. Второй контур реле перегрузки представляет собой цепь управления с управляющим контактом. Если контакт размыкается, из-за чрезмерного нагрева в термонагревателе, цепь управления будет прервано и двигатель остановится. Показан блок теплового реле перегрузки. на фиг. 2. Схематическая диаграмма показана на фиг. 3.
РИС. 2
(A) Реле перегрузки из плавкого сплава со снятым левым нагревателем. (Б) А
перегрузочный узел биметаллического типа со снятым ТЭНом (под биметаллическим реле).
См. РИС. 1 для следующего пояснения. Когда ток нагрузки якорь превышает номинальный допустимый процент тока полной нагрузки, термоэлемент перегрузки (точки 1-2) нагревается и размыкает контакты 6-7 в цепь управления. Реле управления М обесточено, а главные контакты 2-3 М откройте и отключите двигатель от сети.
РИС. 3 Схематические обозначения теплового реле перегрузки. Обогреватель и
контакты вместе составляют реле перегрузки.
Останов двигателя
При нажатии кнопки стоп происходит разрыв цепи управления в точках 8-9. Происходит та же последовательность отключения, что и в случае состояния перегрузки. обсуждалось ранее. Уплотнительная цепь 7-8 в каждом случае разорвана.
Преимущество этого типа автоматического пускателя в том, что он не подает
полное напряжение на якоре до тех пор, пока скорость двигателя не станет правильной.
стартер исключает человеческий фактор, который может возникнуть в результате использования ручного стартера.
ЭЛЕКТРИЧЕСКАЯ СХЕМА ПАНЕЛИ
РИС. 4 Схема подключения панели для контроллера двигателя постоянного тока CEMF.
РИС. 4 показана та же схема управления CEMF, что и на фиг. 1. Однако на схеме подключения панели расположение проводки на панели относительно фактическое расположение клемм оборудования на задней панели панели управления. Устранение неполадок или проверка исходных установок требует точного сравнения элементарных принципиальных схем и панельных диаграмм. Электрик должен используйте систему проверки соединений на схеме с реальными соединениями панели. Например, цветным карандашом можно поставить галочки на диаграмме. поскольку каждое соединение правильно прослеживается на панели и сравнивается со схемой.
ПРОВОД ИЛИ ВНЕШНЯЯ ПРОВОДКА
Показана вся необходимая внешняя проводка между изолированными панелями и оборудованием
в плане трубопровода (РИС. 5). Правильный размер трубопровода, размер и количество
проводов и назначение каждого провода указаны на этом плане. Электрик
ссылается на этот план при завершении фактической установки контроллера CEMF.
РИС. 5 План кабелепровода или внешней проводки для контроллера CEMF.
ПРИВОДЫ С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ПОСТОЯННОГО ТОКА
Преобразователи частоты постоянного токадоступны в удобных блоках, включающих все необходимые цепи управления и питания.
Некоторые требования к оборудованию настолько точны, что некоторые переменные частоты переменного тока диски могут не подойти. В таких случаях двигатели постоянного тока обеспечивают характеристики, которых нет у двигателей переменного тока. Двигатель постоянного тока с регулируемой управление напряжением очень универсально и может быть адаптировано к большому разнообразию Приложения.
В более широком диапазоне мощности мотор-генераторная установка раньше была одной из
наиболее широко используемые методы получения регулируемой скорости. Набор состоит
двигателя переменного тока, приводящего в действие генератор постоянного тока для подачи питания на двигатель постоянного тока. Такой мотор-генератор
установленные приводы, иногда называемые системами Уорда-Леонарда, использовались в первых двигателях постоянного тока.
контроля и продолжали устанавливаться до 1980-х, чтобы контролировать скорость
двигателя, регулируя мощность, подаваемую на поле генератора,
и, как следствие, выходное напряжение на двигатель (фиг. 6). Генератор
ток возбуждения можно изменять с помощью реостатов, как показано, или с помощью регулируемых трансформаторов.
подачей выпрямителя постоянного тока или автоматически с использованием полупроводниковых элементов управления.
Когда желательно также контролировать двигательное поле, применяются аналогичные средства.
использовал. Многие из этих систем все еще работают, но одна из них устанавливается редко.
как новая система.
Скорость и крутящий момент системы, показанной на РИС. 6 можно управлять
регулировка напряжения поля, или якоря, или того и другого. Скорости выше
базовая скорость двигателя (номинальная скорость) получается путем ослабления двигателя
шунтирующее поле. Скорости ниже базовой скорости двигателя достигаются за счет ослабления
генераторное поле. В результате снижается напряжение генератора.
питание якоря двигателя постоянного тока. Двигатель должен иметь полное шунтирующее поле для
скорости ниже базовой скорости, чтобы дать эффект непрерывного контроля,
а не ступенчатое регулирование скорости двигателя.
Двигатель, используемый для обеспечения приводной мощности, может быть трехфазным асинхронным двигателем. двигатель, как показано на фиг. 6. После запуска приводного двигателя он работает непрерывно с постоянной скоростью для привода генератора постоянного тока.
Якорь генератора электрически соединен с якорем двигателя как показано.
Если напряженность поля генератора изменяется, напряжение от постоянного тока
Генератор может управляться для подачи любого количества тока на двигатель постоянного тока.
В результате двигатель постоянного тока можно заставить вращаться с разными скоростями. Потому что
индуктивности полей постоянного тока и времени, необходимого генератору для
нарастание напряжения, чрезвычайно плавное ускорение достигается с нуля об/мин
скорости выше базовой.
Поле генератора постоянного тока можно реверсировать автоматически или вручную, с в результате реверсирование вращения двигателя.
Сопротивление поля генератора можно изменить автоматически с помощью тиристоров. (или тиристоры) или реле времени, управляемые CEMF через якорь двигателя. Сопротивление поля генератора также можно изменить вручную.
Электроприводы с регулируемой скоростью вращения предлагают широкий выбор
диапазоны скоростей, крутящий момент и характеристики мощности. Они обеспечивают средство
для управления ускорением и торможением, а также методы автоматического или
ручная операция. Управляющий сигнал обратной связи тахометра может управляться
вал двигателя постоянного тока. Это усовершенствование системы для получения предустановленной константы
скорость. Этот метод зависит от типа приложения, скорости и степени
желаемый ответ. В дополнение к скорости управляющий сигнал обратной связи может
быть настроен на реакцию на давление, напряжение, удар или какую-либо другую функцию преобразователя.
РИС. 6 (A) Базовая электрическая теория двигателя-генератора постоянного тока с регулируемой скоростью
система контроля. (B) Комплектный мотор-генератор с регулируемой скоростью постоянного тока
система питается от сети переменного тока.
Одна из наиболее выгодных характеристик привода мотор-генераторной установки
является присущей ему способностью к регенерации. Другими словами, при высокой инерции
нагрузка перегружает двигатель, двигатель постоянного тока становится генератором и обеспечивает реверс
сила. Например, предположим, что двигатель постоянного тока работает на базовой скорости. Если генератор
напряжение уменьшается путем регулировки реостата для замедления двигателя, двигатель
встречное напряжение будет выше напряжения генератора, а ток
переворачивает. Это действие приводит к обратному крутящему моменту в двигателе, и двигатель
замедляет. Этот процесс называется динамическим торможением. Эта динамическая функция
очень желателен при использовании на подъемниках для опускания тяжелых грузов, металлообрабатывающих станках,
текстильные и бумагообрабатывающие машины, и в целом промышленности для контролируемого
остановка высокоинерционных нагрузок. Также реализованы несколько моторных приводов.
с этим типом мотор-генераторного привода.
Приводы мотор-генераторов с автоматическими регуляторами используются уже много лет. почти для каждого типа приложений. Более высокая степень сложности в разработана система управления, позволяющая выполнить практически любое желаемое уровень точности или отклика.
СТАТИЧЕСКИЕ ПРИВОДЫ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ
Несмотря на прежнее использование мотор-генераторных приводов, вращающиеся машины
были необходимы для преобразования переменного тока в механическую энергию. В результате комбинированный
КПД набора невысокий; требуется обычная вращающаяся машина
обслуживания, и это шумно. Используемые в настоящее время статические приводы постоянного тока не имеют
части в оборудовании преобразования энергии, которое преобразует (выпрямляет) и управляет
мощность переменного тока (рис. 7 и 8). Твердотельные устройства используются для контролируемого
преобразование сетевого питания переменного тока в постоянный.
Основная теория для получения скорости двигателя постоянного тока ниже и выше базовой скорости то же, что и с мотор-генераторной установкой. Только способ управления напряжение и напряженность поля различаются. Например, на фиг. 9, арматура питается постоянным током, выпрямленным от источника переменного тока.
Переменный ток выпрямляется с помощью тиристора в контролируемой цепи для получения
ОКРУГ КОЛУМБИЯ. Затвор тиристора включает тринистор на нужной части
полуволна, тем самым контролируя скорость двигателя ниже базовой. ИНЖИР. 9это
упрощенная схема для иллюстрации. Напряженность поля будет
удерживаться в полной силе аналогичным образом. Для скоростей выше двигателя
базовая скорость, управление полем может ослабить силу поля с полной арматурой
Напряжение. Тахометр обратной связи поддерживает заданную скорость.
РИС. 7 Панель управления приводом двигателя постоянного тока с тиристором.
РИС. 8 SCR различных размеров.
РИС. 9 Однофазный однополупериодный якорь, управляющий небольшим двигателем.
На фиг. 9, SCR управляется настройкой потенциометра, или контроль скорости.
Изменяет время включения тиристора на цикл переменного тока и, таким образом, изменяет величину среднего тока, протекающего через якорь. Когда контроль скорости выше базовой скорости требуется, цепь выпрямителя в поле контролируется тиристорами, а не диодами.
SCR, или тиристор, может контролировать всю положительную форму сигнала или напряжение через
использование метода, называемого фазовым сдвигом. Покрытие теории метода
выходит за рамки данного руководства.
SCR, вероятно, является самым популярным твердотельным устройством для управления большими и малые электрические нагрузки. SCR представляет собой управляемый выпрямитель, который управляет электрический ток. Он не будет проводить, когда напряжение на нем находится в обратное направление.
Он будет работать только в прямом направлении, если правильный сигнал (напряжение) подается на клемму затвора (см. фиг. 10). Ворота обычно управляются электронными импульсами от схемы управления.
Затвор включит SCR, но не выключит его в цепи постоянного тока. К
включить анодно-катодную секцию тиристора (замкнуть выключатель), затвор должен
иметь ту же полярность, что и анод по отношению к катоду. После ворот
включил SCR, он остается включенным до тех пор, пока ток, протекающий через
силовая цепь (участок анод-катод) либо прерывается, либо падает до низкого
достаточный уровень, чтобы устройство выключилось. Анод-катодный ток
должен упасть ниже уровня удерживающего тока. Ток удержания, или поддержание
ток — это величина тока, необходимая для поддержания тиристора во включенном состоянии. СКВ
выполняет ту же функцию, что и реостат, контролируя напряженность моторного поля.
или напряжение на якоре. Это похоже на переменное сопротивление, потому что оно
можно регулировать во всем диапазоне мощности. Система управления SCR заменила
реостат, потому что он меньше по размеру при том же номинальном токе, больше энергии
эффективно и дешевле.
ОБЗОР
Двигатели постоянного токануждаются в элементах управления для запуска, остановки, защиты и регулировки скорости и крутящий момент двигателя.
Используемые системы должны соответствовать NEC, а также иметь одобрение от испытаний
таких фирм, как Underwriters Laboratories, Inc. Двигатели должны быть защищены
от перегрева и повреждения двигателя и окружающего пространства.
В этом руководстве представлены два основных стиля схем электрических соединений: схематическая,
который показывает электрическую последовательность работы компонентов и проводку
диаграмма, которая показывает физическую взаимосвязь оборудования. Мотор-генератор
наборы были представлены для ознакомления с возможными источниками управления постоянным током.
В настоящее время большая часть управления осуществляется твердотельными электронными приводами постоянного тока.
РИС. 10 Схематическое обозначение SCR.
ВИКТОРИНА
Выберите правильный ответ для каждого из следующих утверждений и поместите соответствующую букву в отведенном месте.
1. Наименее важный план или диаграмма при поиске и устранении неисправностей управления двигателем вероятно _____
а. план электрической схемы.
б. схема панели.
в. план внешней разводки.
д. план помещения, в котором установлены контроллеры.
2. Лучшей диаграммой для определения того, как работает контроллер, является ____
а. план электрической схемы.
б. план панели.
в. внешний план.
д. архитектурный план.
3. Физическое расположение проводов управления показано на
а. план электрической схемы.
б. архитектурный план.
в. план трубопровода.
д. схема подключения панели.
4. Контроллер DC CEMF является результатом автоматических действий _
а. приложенное напряжение.
б. изменение напряжения на якоре.
в. изменение напряжения в поле.
д. пусковой ток.
5. Защита от перегрузки аналогична _
.а. пусковая защита.
б. механическая защита.
в. электрическая защита.
д. ходовая защита.
6. Контакты перегрузки размыкают цепь, когда ток двигателя достигает _
а. 85% от полной загрузки.
б. 100% полной нагрузки.
в. 125% полной нагрузки.
д. 150% от полной загрузки.
7. В случае, если двигатель превышает допустимое значение, он защищен _
а. пусковая защита.
б. предохранители.
в. перегрузочный термоэлемент.
д. кнопка остановки.
8. При замкнутом разъединителе поле шунта на РИС. 1 помещается
через линию, когда
а. Контакт замыкается.
б. выключатель замкнут.
в. М контакт замыкается.
д. кнопка запуска закрывается.
9. На фиг. 1, контакт А замкнут, когда
а. кнопка запуска закрыта.
б. кнопка остановки открыта.
в. Катушка обесточена.
д. Катушка находится под напряжением.
10. Двигатель на РИС. 1 ставится через строку, когда
а. кнопка запуска закрыта.
б. выключатель замкнут.
с. контакт А замкнут.
д. контакт М замкнут.
11. Какова базовая скорость двигателя постоянного тока? ___
12. Как регулируется скорость двигателя постоянного тока выше базовой скорости? __
13. Как регулируется скорость двигателя постоянного тока ниже базовой скорости? __
14. Как SCR может заменить реостат?___
15. Перечислите преимущества использования тиристоров в управлении электроприводом. __
Типы двигателей постоянного тока | Шунт, серия, соединение, двигатель постоянного тока с постоянными магнитами
Хотите создать сайт? Найдите бесплатные темы и плагины WordPress.
Существует четыре основных типа двигателей постоянного тока: серийные двигатели постоянного тока, параллельные двигатели постоянного тока, комбинированные двигатели постоянного тока и двигатели постоянного тока с постоянными магнитами. См. рис. 1. Эти двигатели постоянного тока имеют схожий внешний вид, но отличаются внутренней конструкцией и выходными характеристиками.
Рисунок 1. Четыре основных типа двигателей постоянного тока Схемы: двигатели постоянного тока последовательного действия, двигатели постоянного тока параллельного соединения, составные двигатели постоянного тока и двигатели постоянного тока с постоянными магнитами.
ТЕХНИЧЕСКИЕ ФАКТЫ
Выводы якоря двигателя постоянного тока обозначены A1 A2, выводы шунтирующего возбуждения обозначены F1 и F2, а последовательные выводы возбуждения обозначены S1 и S2. Когда выводы двигателя постоянного тока подключены к источнику питания постоянного тока, A1, F1 и S1 обычно подключаются ближе всего к положительной стороне питания, а A2, F2 и S2 подключаются ближе всего к отрицательной стороне питания.
Серийный двигатель постоянного тока
Серийный двигатель постоянного тока представляет собой двигатель постоянного тока, в котором последовательное поле подключено последовательно с якорем. Поле должно выдерживать ток нагрузки, проходящий через якорь. Поле имеет относительно небольшое количество витков провода большого сечения.
Провода, идущие от последовательной катушки, имеют маркировку S1 и S2. Провода, отходящие от якоря, имеют маркировку А1 и А2. См. рис. 2.
Рис. 2. Последовательный двигатель постоянного тока (схема) представляет собой двигатель, в котором поле подключено последовательно с якорем.
Характеристики двигателя постоянного тока
Двигатель постоянного тока обеспечивает высокий пусковой крутящий момент. См. рис. 3. Катушка возбуждения (последовательное поле) двигателя соединена последовательно с якорем.
Несмотря на плохое управление скоростью, двигатель постоянного тока создает очень высокий пусковой момент и идеально подходит для приложений, в которых пусковая нагрузка велика. Приложения включают краны, подъемники, электрические автобусы, трамваи, железные дороги и другие приложения с большой тягой.
Рис. 3. Кривая скорости вращения двигателя постоянного тока серии A
Крутящий момент, создаваемый двигателем, зависит от напряженности магнитного поля в двигателе . Сила магнитного поля зависит от величины тока, протекающего через последовательное поле.
Величина тока, протекающего через двигатель, зависит от величины нагрузки. Чем больше нагрузка, тем больше ток.
Любое увеличение нагрузки увеличивает ток как в якоре, так и в последовательном поле, поскольку якорь и поле соединены последовательно. Этот повышенный ток дает двигателю постоянного тока высокий выходной крутящий момент.
Скорость вращения двигателя серии постоянного тока Характеристики
В двигателях серии постоянного тока скорость быстро изменяется при изменении крутящего момента.
Когда крутящий момент высокий, скорость низкая; а когда скорость высокая, крутящий момент низкий. Это происходит из-за большого увеличения потока, поскольку увеличенный ток (созданный нагрузкой) протекает через последовательное поле. Этот увеличенный поток создает большую противодействующую электродвижущую силу, которая значительно снижает скорость двигателя.
При снятии нагрузки двигатель быстро увеличивает скорость. Без нагрузки двигатель будет неконтролируемо набирать скорость. В некоторых случаях скорость может стать достаточно большой, чтобы повредить двигатель. По этой причине двигатель постоянного тока всегда следует подключать непосредственно к нагрузке, а не через ремни, цепи и т. д.
Регулятор скорости двигателя постоянного тока
Скорость двигателя постоянного тока регулируется изменением приложенного напряжения. Хотя управление скоростью последовательного двигателя не так хорошо, как управление скоростью параллельного двигателя, не во всех приложениях требуется хорошее регулирование скорости.
Преимущество высокого выходного крутящего момента перевешивает хороший контроль скорости в некоторых приложениях, таких как стартер в автомобилях.
Шунтирующий двигатель постоянного тока
Шунтирующий двигатель постоянного тока представляет собой двигатель постоянного тока, поле которого подключено параллельно (параллельно) якорю.
Провода, идущие от шунтирующего поля шунтирующего двигателя постоянного тока, имеют маркировку F1 и F2. Обмотки якоря имеют маркировку А1 и А2. См. рис. 4.
Рис. 4. Шунтирующий двигатель постоянного тока (схема) представляет собой двигатель с возбуждением, подключенным параллельно (параллельно) якорю.
Поле имеет множество витков провода, а ток в поле не зависит от якоря, что обеспечивает шунтирующему двигателю постоянного тока превосходную регулировку скорости.
Шунтирующее поле может быть подключено к тому же источнику питания, что и якорь, или может быть подключено к другому источнику питания.
Самовозбуждающееся шунтирующее поле представляет собой шунтирующее поле, подключенное к тому же источнику питания, что и якорь. Шунтирующее поле с независимым возбуждением представляет собой шунтирующее поле, подключенное к источнику питания, отличному от якоря.
Шунтирующие двигатели постоянного тока Применение
Шунтирующие двигатели постоянного тока используются там, где требуется постоянная или регулируемая скорость и пусковые условия умеренные.
Типичные области применения включают вентиляторы, воздуходувки, центробежные насосы, конвейеры, лифты, деревообрабатывающее и металлообрабатывающее оборудование.
Характеристики шунтирующего двигателя постоянного тока
В шунтирующем двигателе постоянного тока при снижении напряжения на якоре скорость также снижается. Если сила магнитного поля уменьшается, двигатель ускоряется.
Шунтирующие двигатели постоянного тока ускоряются при уменьшении напряженности шунтирующего поля, потому что при меньшей напряженности поля в якоре развивается меньшая противоэлектродвижущая сила. Когда противодействующая электродвижущая сила снижается, ток якоря увеличивается, создавая повышенный крутящий момент и скорость.
Для управления скоростью шунтирующего двигателя постоянного тока изменяют напряжение на якоре или ток шунтирующего поля. См. рис. 5.
Рис. 5. Для управления скоростью шунтирующего двигателя постоянного тока напряжение на якоре изменяется при изменении тока шунтирующего поля.
Регулятор скорости шунтирующего двигателя постоянного тока
Полевой реостат или якорный реостат используется для регулировки скорости шунтирующего двигателя постоянного тока. См. рис. 6.
Реостат используется для увеличения или уменьшения напряженности поля или якоря. После того, как напряженность поля установлена, она остается постоянной независимо от изменений тока якоря.
По мере увеличения нагрузки на якорь ток якоря и крутящий момент двигателя увеличиваются. Это замедляет якорь, но уменьшение противоэлектродвижущей силы (CEMF) одновременно позволяет дополнительно увеличить ток якоря и, таким образом, возвращает двигатель к заданной скорости. Двигатель работает с довольно постоянной скоростью при любых настройках управления.
Рис. 6. Полевой реостат или якорный реостат используется для регулировки скорости шунтирующего двигателя постоянного тока.
Шунтовой двигатель постоянного тока Характеристики крутящего момента и скорости
Шунтирующий двигатель постоянного тока имеет относительно высокий крутящий момент на любой скорости. Крутящий момент двигателя прямо пропорционален току якоря. По мере увеличения тока якоря увеличивается и крутящий момент двигателя с небольшим падением скорости двигателя.
Составной двигатель постоянного тока
Составной двигатель постоянного тока представляет собой двигатель постоянного тока с возбуждением, подключенным как последовательно, так и параллельно с якорем.
Катушка возбуждения представляет собой комбинацию последовательного поля (S1 и S2) и шунтирующего поля (F1 и F2). См. рис. 7.
Рис. 7. Составной двигатель постоянного тока (схема) представляет собой двигатель с возбуждением, подключенным как последовательно, так и параллельно с якорем.
Характеристики составного двигателя постоянного тока
Последовательное поле подключается последовательно с якорем. Шунтирующее поле подключается параллельно с последовательной комбинацией поля и якоря.
Такое расположение дает двигателю преимущества последовательного двигателя постоянного тока (высокий крутящий момент) и параллельного двигателя постоянного тока (постоянная скорость). См. рис. 8.
Рис. 8. Кривая характеристик скорости и крутящего момента составного двигателя постоянного тока A
Применение составного двигателя постоянного тока
Составные двигатели постоянного тока используются, когда требуется высокий пусковой момент и постоянная скорость. Типичные области применения включают штамповочные прессы, ножницы, гибочные станки и подъемники.
Регулирование скорости комбинированного двигателя постоянного тока
Регулирование скорости достигается в комбинированном двигателе постоянного тока путем изменения силы тока шунтирующего поля или изменения напряжения, подаваемого на якорь. Это достигается с помощью контроллера, в котором используются резисторы для снижения приложенного напряжения, или с помощью источника переменного напряжения.
Двигатель постоянного тока с постоянными магнитами
Двигатель постоянного тока с постоянными магнитами — это двигатель, в котором для полюсов возбуждения используются магниты, а не обмотка.
Двигатели постоянного тока с постоянными магнитами имеют литые магниты, вмонтированные в стальной корпус. Постоянные магниты представляют собой катушки возбуждения. Постоянный ток подается только на якорь. См. рис. 9.
Рис. 9. В двигателе постоянного тока с постоянными магнитами (схема) для полюсов возбуждения используются магниты, а не обмотка.
Электродвигатели постоянного тока с постоянными магнитами Применение
Электродвигатели постоянного тока с постоянными магнитами используются в автомобилях для управления сиденьями с электроприводом, электрическими стеклоподъемниками и стеклоочистителями.
Характеристики двигателя постоянного тока с постоянными магнитами
Двигатели постоянного тока с постоянными магнитами создают относительно высокий крутящий момент на низких скоростях и обеспечивают некоторое самоторможение при отключении от источника питания. Не все двигатели постоянного тока с постоянными магнитами предназначены для непрерывной работы, поскольку они быстро перегреваются. Перегрев разрушает постоянные магниты.
Вы нашли apk для Android? Вы можете найти новые бесплатные игры и приложения для Android.
6-колесный вездеход — ESC и электропроводка двигателя
Давайте посмотрим, как мы управляем шестью двигателями в шасси вездехода.
Расположение двигателей
Мой 6-колесный уличный робот-марсоход приводится в движение шестью коллекторными двигателями постоянного тока. Эти двигатели подключены параллельно, по три с каждой стороны робота.
Это устройство известно как скользящее рулевое управление, тогда как марсоход управляется путем изменения скорости двигателей с каждой стороны. Итак, чтобы повернуть налево, вы ускоряете правые колеса и замедляете левые. Те дешевые шасси автомобилей-роботов, вокруг которых мы всегда строим роботов, используют тот же метод рулевого управления.
Из предыдущего сообщения о шасси робота видно, что наши двигатели имеют следующие характеристики:
- Номинальное напряжение: 6 В постоянного тока (мин. 2 В, макс. 7,5 В)
- Ток блокировки: максимум 5,5 А
- Максимальный ток блокировки 5,5 А
- Ток холостого хода на двигатель: 350 мА
- Об/мин двигателя: 10000 +/- 5%
- Скорость выходного вала: 295 об/мин +/- 5%
- Опрокидывающий момент 4 кг/см
- Крутящий момент при заблокированном роторе: 4 кг/см
Таким образом, если мы можем ожидать максимум 5,5 ампер на каждом двигателе, мы получим максимальное потребление тока 16,5 ампер для каждой стороны.
Подключение двигателей
Когда я получил Wild Thumper, он был неправильно подключен к клеммной колодке. Я снял клеммную колодку и, как я описал в предыдущей статье, перенаправил провода двигателя через резиновые втулки.
Каждый из проводов двигателя был оконцован 2-контактным разъемом Molex, чтобы упростить повторную проводку и замену двигателя.
Затем я установил клеммную колодку внутри пластиковой коробки, предварительно просверлив в коробке пару отверстий и вставив в них резиновые втулки.
Затем я подключил все соединения двигателя внутри коробки. Я также подключил два разъема XT60 для входов от ESC.
Для электропроводки двигателя я использовал провод 18 калибра с силиконовым покрытием. На входах ESC использовался провод 14 калибра с силиконовым покрытием. В конструкции этого вездехода я использую много силиконовой проволоки, она более гибкая и с ней очень приятно работать.
Электронные регуляторы скорости (ESC)
Почти у каждого разработанного мной робота двигатели приводились в действие с помощью контроллера H-Bridge. И хотя это прекрасный метод управления коллекторным двигателем постоянного тока, он не единственный.
Электронный регулятор скорости, или ESC, в точности соответствует тому, на что он похож — электронный контроллер, контролирующий скорость двигателя. Мы часто ассоциируем ESC с бесколлекторными двигателями, такими как те, что используются в квадрокоптерах хорошего качества, но вы также можете купить ESC для коллекторных двигателей. И это именно то, что я сделал.
ESC, которые я купил (я купил их в Mouser), были контроллерами DFRobot DRI0048. К счастью, они сняты с производства, так как я купил их несколько месяцев назад, поэтому их может быть трудно найти. Но вы можете использовать аналогичные регуляторы для своего дизайна.
Вот технические характеристики регуляторов DRI0048:
- Тип: двунаправленный щеточный регулятор
- Непрерывный ток: 40 А
- Диапазон напряжения: 7–24 В (литиевая батарея 2S)
- Пиковый ток: 340 А вперед, 340 А назад
- Выходная линия: линия питания и линия двигателя 16AWG-100 мм
- Тип управляющего сигнала: ШИМ
- Разъем питания: разъем XT60
- Разъем двигателя: штекер XT60
- Размеры: Д 47 мм, Ш 37,5 мм, В 28,5 мм (включая радиатор)
- Вес: 30 г
По сути, это просто радиатор с несколькими торчащими проводами, каждый блок имеет три разъема:
- Разъем XT60 для питания аккумулятора.
- Разъем XT60 для выхода двигателя.
- 3-контактный разъем Dupont для входа управления ESC.
Эти ESC рассчитаны на максимальный ток 40 ампер, что намного больше, чем 16,5 ампер, которые я ожидаю, если все двигатели заглохнут одновременно. И DFRobot делает 20-амперную версию того же регулятора, который на момент написания этой статьи еще не снят с производства. И 20 ампер все равно много, тем более, что ESC рассчитан на пиковые 320 ампер!
Соединения управления
Кабель управления на каждом ESC очень похож на кабель управления на серводвигателе, и это не просто совпадение.
Проводка кабеля действительно соответствует проводке стандартного серводвигателя для хобби, и ESC управляется с помощью аналогичного сигнала PPM (импульсная модуляция положения). Если вы когда-либо использовали серводвигатель непрерывного вращения, то вы знакомы с тем, из чего состоят управляющие сигналы для этого ESC.
Однако, в отличие от подключения серводвигателя, вывод VCC на кабеле управления является не входом, а выходом! ESC питается от источника питания двигателя, поэтому красный провод на кабеле управления является низковольтным выходом.
По этой причине вы можете подключить недорогой тестер сервоприводов к ESC и протестировать его, что хорошо сделать после того, как все двигатели подключены. ESC будет питать сервотестер, и вы можете запускать оба ESC одновременно.
Обратите внимание, что вместо управления положением двигателя, как при тестировании сервопривода, вы управляете скоростью двигателя. В середине моторы остановятся; это нулевая отметка. Идите в одном направлении, и они будут вращаться вперед; на противоположной стороне нулевой отметки они будут вращаться назад. Во всех случаях вы также можете контролировать скорость двигателей.
Мощность двигателя
Оба двигателя питаются от 7,4-вольтовой двухэлементной батареи LiPo. Эта батарея используется только для двигателей и ESC, остальная часть робота будет использовать другой LiPo (3-элементный блок на 11,4 В).
LiPo монтируется в одном из мест, предусмотренных на шасси Wild Thumper, я добавил пенопластовую прокладку, чтобы закрепить и защитить его.
Я также добавил предохранитель последовательно с разъемом аккумулятора. Это не совсем необходимо, так как у ESC есть термовыключатель, который должен сработать, если что-то пойдет не так. Но мне нравится быть в безопасности, поэтому я всегда включаю предохранитель в свои конструкции.
Я нигде не смог найти готовый коннектор предохранителя XT60, а это означает, что, возможно, я единственный человек на земле, который готов плавить выход своего LiPo. Поэтому я сделал свой собственный, используя встроенный предохранитель, продаваемый для автомобильного использования. У этой красавицы силиконовый провод 10 калибра, поэтому я купил кусок черного провода 10 калибра и припаял его к некоторым разъемам XT60. Паять было непросто, я использовал паяльник и много термоусадочных трубок. Результаты были отличными, и теперь у меня есть предохранитель на 40 ампер вместе с моими регуляторами и двигателями, на всякий случай!
Вот как я все это подключил:
Обратите внимание, что на этой схеме не показаны управляющие входы регуляторов скорости.
6-колесный вездеход — ESC и электропроводка двигателя
Tagged on: 6-колесный робот
КАК УСТАНОВИТЬ ПОТОЛОЧНЫЙ ВЕНТИЛЯТОР С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Установка любого потолочного вентилятора, как правило, очень простой процесс, и он так же прост при установке потолочного вентилятора, оснащенного двигателем постоянного тока. энергоэффективный двигатель постоянного тока. Тем не менее, есть некоторые предупреждения, которые следует знать, прежде чем продолжить и попытаться подключить вентилятор постоянного тока к источнику питания.
ПОДКЛЮЧЕНИЕ СТАНДАРТНОГО ВЕНТИЛЯТОРА ПЕРЕМЕННОГО ТОКА НЕМНОГО ИНОЕ
В прошлом, когда все вентиляторы оснащались стандартным двигателем переменного тока, многие электрики подключали потолочный вентилятор, не чувствуя необходимости отключать автоматический выключатель или даже настенный выключатель, который подает питание на вентилятор.
Хотя это всегда хорошая идея, опытный электрик понимает, что пока они работают только с одним проводом за раз, а остальные провода закрыты, им не о чем беспокоиться. любой вид поражения электрическим током. Они знают, что для того, чтобы произошел шок, им нужно коснуться металлической части провода, с которым они работают, и в то же время заземлить себя на что-то другое из металла, чтобы замкнуть цепь. Поэтому во многих случаях электрики могут просто держать провод за изолированную часть (цветное покрытие) и подключать по одному проводу. В конце концов, для стандартных вентиляторов речь идет только об одном проводе питания, одном нейтральном проводе и одном проводе заземления.
Даже традиционные потолочные вентиляторы с дистанционным управлением и двигателем переменного тока мало чем отличаются. Единственная разница в том, что обычно есть удаленный приемник, который отделяет три провода вентилятора от проводов питания на потолке. На одной стороне удаленного приемника обычно есть синий, черный и белый провода. Сверху вентилятора идут те же три цветных провода. Нужно только просто соединить эти провода вместе по их цвету. Затем, на другой стороне удаленного приемника всегда есть черный провод и белый провод (отдельно от той стороны, где находятся три черных, белых и синих провода), и эти два провода просто подключаются к черному проводу и белому проводу. провод, выходящий из потолка.
При подключении вентилятора переменного тока с дистанционным управлением или без него после завершения этих проводных соединений вы можете проверить работу вентилятора с установленными лопастями или без них.
НИКОГДА НЕ ПЫТАЙТЕСЬ ПОДКЛЮЧИТЬ ВЕНТИЛЯТОР ПОСТОЯННОГО ТОКА С ВКЛЮЧЕННЫМ АВАРИЙНЫМ ВЫКЛЮЧАТЕЛЕМ
Потолочный вентилятор постоянного тока более чувствителен при подключении проводов, поэтому необходимо отключить питание перед началом любого процесса подключения. Неважно, насколько комфортно электрик чувствует себя рядом с источником питания, вентилятор постоянного тока очень и очень чувствителен, и при подключении проводки необходимо отключать питание . Любая небольшая дуга или скачок напряжения во время процесса могут и, вероятно, повредят удаленный приемник потолочного вентилятора постоянного тока. Поэтому крайне важно отключить питание перед началом установки. Причина в том, что приемник также содержит преобразователь, который преобразует мощность переменного тока дома в постоянный ток, прежде чем этот ток попадет на двигатель вентилятора. Из-за сложности задачи, которую должен выполнять приемник, схема более чувствительна, и при подключении следует соблюдать осторожность.
После отключения питания и начала процесса подключения подключение потолочного вентилятора к двигателю постоянного тока ничем не отличается от подключения вентилятора к двигателю переменного тока. Неважно, внутренний это или наружный потолочный вентилятор постоянного тока, процесс подключения будет одинаковым.
В некоторых моделях постоянного тока приемник уже подключен к двигателю, и необходимо подключить только черный и белый провода, а также провод заземления к потолочному источнику. Их гораздо проще подключить, чем даже стандартный потолочный вентилятор. Неважно, есть у вентилятора подсветка или нет, вам все равно нужно будет подключить только горячий провод, нейтраль и землю. Это настолько просто, что сбивает с толку некоторых электриков, особенно если они никогда раньше не видели такого вентилятора.
Другие, такие как вентиляторы Minka Aire, имеют отдельный удаленный приемник, который подключается точно так же, как и удаленный приемник вентилятора переменного тока, за исключением того, что иногда цвета проводов на стороне вентилятора могут немного отличаться. Независимо от цвета проводов, вы все равно будете подключать провода, исходя из соответствия цвета ресивера цвету вентилятора. Просто убедитесь, что черный и белый провода, предназначенные для подключения к потолочным проводам, подключены к потолочным проводам, а не случайно подключены к тем же черным и белым проводам, которые идут от двигателя вентилятора. Эти провода будут четко обозначены на приемнике, и если внимательно следить за ними, их легко распознать.
ПОСЛЕ ПОДКЛЮЧЕНИЯ ПРОВОДОВ К ПОТОЛОЧНОМУ ВЕНТИЛЯТОРУ ПОСТОЯННОГО ТОКА
После подключения всех проводов приступайте к установке лопастей. В отличие от старых потолочных вентиляторов переменного тока, не пытайтесь включить вентилятор постоянного тока до установки лопастей и полной сборки . Это связано с процессом настройки, который требуется вентилятору постоянного тока для правильной работы, а также с конструкцией самих двигателей. Большинство двигателей вентиляторов постоянного тока не будут работать без предварительного измерения веса лопастей.
Для других требуется процесс калибровки, который занимает до 7 минут, в течение которых двигатель настраивается в зависимости от размера и веса установленных лопастей. Это особенно верно для больших потолочных вентиляторов, которые используют один и тот же двигатель с различными вариантами размаха лопастей. Попытка запустить вентилятор до установки лопастей может привести к необратимому повреждению двигателя. Поэтому внимательно следуйте всем указаниям, прилагаемым к вентилятору! Не пропускайте шаги! Ваш новый вентилятор постоянного тока будет работать безупречно, если вы правильно откалибруете его и/или правильно подключите пульт дистанционного управления.
ХОРОШАЯ РАБОТА! ВАШ ВЕНТИЛЯТОР ГОТОВ К ВАШИМ УДОВОЛЬСТВИЯМ
После того, как вы закончите установку нового потолочного вентилятора постоянного тока, у вас будет установлен потолочный вентилятор, который намного превосходит любой потолочный вентилятор, в котором используется традиционный двигатель переменного тока.
