Как работают схемы на микроконтроллерах. Какие бывают типы микроконтроллеров. Для чего применяются микроконтроллеры в электронике. Как создать устройство на базе микроконтроллера.
Основы микроконтроллеров и их применение в электронике
Микроконтроллеры — это программируемые микросхемы, которые широко используются в современной электронике. Они позволяют создавать компактные устройства с широким функционалом. Основные преимущества микроконтроллеров:
- Компактные размеры
- Низкое энергопотребление
- Возможность программирования
- Наличие встроенной памяти и периферии
- Невысокая стоимость
Благодаря этим качествам микроконтроллеры применяются в самых разных устройствах — от простых термометров до сложных систем управления. Рассмотрим несколько популярных схем на микроконтроллерах.
Термометр на микроконтроллере PIC12F629
Одна из простых, но полезных схем — цифровой термометр на микроконтроллере PIC12F629. Основные компоненты:
- Микроконтроллер PIC12F629
- Датчик температуры DS18B20
- ЖК-дисплей от телефона Nokia 3310
Схема позволяет измерять температуру в диапазоне от -55 до +125°C с точностью 0.5°C. Обновление показаний происходит каждые 1.2 секунды. Потребляемый ток — всего 0.2-0.8 мА.
Как собрать термометр на микроконтроллере
Процесс сборки термометра включает следующие этапы:
- Травление печатной платы по предоставленному рисунку
- Программирование микроконтроллера прошивкой
- Монтаж компонентов на плату
- Подключение ЖК-дисплея и датчика температуры
- Установка устройства в корпус
При правильной сборке термометр сразу начинает работать и отображать текущую температуру. Точность измерений не уступает промышленным аналогам.
Кабельный пробник на микроконтроллерах PIC
Более сложное устройство — кабельный пробник для определения номеров жил в многожильных кабелях. Состоит из двух блоков на микроконтроллерах PIC:
- Передатчик на PIC16F628A
- Приемник на PIC16F628A
Передатчик формирует последовательность импульсов на выходах. Приемник считывает эти импульсы и отображает номер жилы на светодиодном индикаторе. Устройство позволяет быстро идентифицировать провода в кабелях до 80 жил.
Принцип работы кабельного пробника
Алгоритм работы пробника следующий:
- Передатчик генерирует уникальное число импульсов для каждого выхода
- Приемник считает импульсы на входе
- По количеству импульсов определяется номер жилы
- Номер отображается на цифровом индикаторе
Такой принцип обеспечивает однозначное определение номеров жил. Устройство работает от батареек и не требует дополнительного питания.

Применение микроконтроллеров в промышленной автоматике
В промышленности широко используются контроллеры серии ККТ для управления электроприводами. Основные модели:
- ККТ-61А
- ККТ-62А
- ККТ-63А
- ККТ-65А
- ККТ-68А
- ККТ-69А
Контроллеры имеют различные схемы коммутации и диаграммы замыкания контактов. Это позволяет управлять разными типами электродвигателей в промышленных установках.
Светодиодные RGB контроллеры и усилители
Для управления светодиодной RGB подсветкой применяются специализированные контроллеры и усилители. Основные схемы подключения:
- С общим блоком питания
- С раздельными блоками питания
- Комбинированные схемы
Усилители позволяют увеличить мощность и количество подключаемых светодиодных лент. При этом сохраняется синхронное управление от одного контроллера.
Особенности применения микроконтроллеров в системах управления
При использовании микроконтроллеров в сложных системах управления важно учитывать следующие моменты:
- Необходимость резервирования питания
- Защита от помех и наводок
- Обеспечение стабильности работы при динамических нагрузках
- Возможность обновления прошивки
- Наличие диагностических функций
Правильный учет этих факторов позволяет создавать надежные системы промышленной автоматики на базе микроконтроллеров.
Перспективы развития микроконтроллерных систем
Основные тенденции в развитии устройств на микроконтроллерах:
- Повышение производительности и объема памяти
- Снижение энергопотребления
- Интеграция беспроводных интерфейсов
- Развитие средств разработки и отладки
- Применение искусственного интеллекта
Это позволит создавать еще более функциональные и эффективные устройства на базе микроконтроллеров в будущем. Сфера их применения будет постоянно расширяться.
ТЕРМОМЕТР НА МИКРОКОНТРОЛЛЕРЕ
Как то попался мне на глаза телефон Nokia 3310 — внук бегал с ним игрался, естественно давно не рабочий. И тут вспомнил, что где-то видел схемы на дисплей от него. Погуглил, выдало несколько ссылочек, на устройства, мне понравился градусник, порывшись в коробочках нашел нашел термодатчик DS18B20, ну и решил собрать по этой схеме, тем более деталей в ней минимум. ЖК дисплей поддерживает два варианта работы: нормальный (на светлом фоне) и противоположный (на темном фоне). Менять режимы можно перемычкой JP1. Ниже смотрим саму схему термометра на микроконтроллере PIC12F629:
Технические параметры устройства:
* Voltage ………………….. 3 — 3.3 В
* Мин. шаг темп…………. 0,1 ‘ C
* Погрешность ………………. +/- 0,5 ‘ C Темп.
* Обновляется каждые …. 1,2 sec.
* Amperage …………….. 0,2 mA — 0,8 mA
* Диапазон измеряемых температур … от -55 до 125°C
Приступаем к сборке, сначала аккуратно извлек дисплей, стекло не стал выкидывать, решил его тоже приспособить.
Протравил плату, в архиве есть рисунок для технологии ЛУТ. Прошил микроконтроллер и просто спаял. Прошивку для термометра можно скачать тут. Сначала датчик подключил через разъем, но он иногда отключался, поэтому его просто припаял.
Самое трудное было припаять проводки к дисплею, на это ушло часа 2 сначала использовал компьютерный шлейф 40 пиновый — очень тяжело и не удобно, так что отказался от него и взял 80 пиновый шлейф, распустил, и все удачно получилось за 5 минут. Подал питание и… термометр заработал.
Дальше осталось придумать, как все это облагородить. Порывшись по полочкам нашел вот такой пластиковый коробок 70х40х16.
После небольших манипуляций с дрелью и напильником получилось такое окошко.
Осталось закрепить там родное стекло, даже не стекло, а пластик, но со свойством увеличения. Далее силиконовым пистолетом делаем точечную сварку — тут главное не перегреть дисплей.
А вот весь термометр на микроконтроллере в сборе:
Работает без глюков и меряет температуру с точностью, не хуже чем у промышленных аналогов. Поэтому данную схему можно смело рекомендовать для повторения. Автор статьи: Ear.
Originally posted 2019-02-03 08:24:43. Republished by Blog Post Promoter
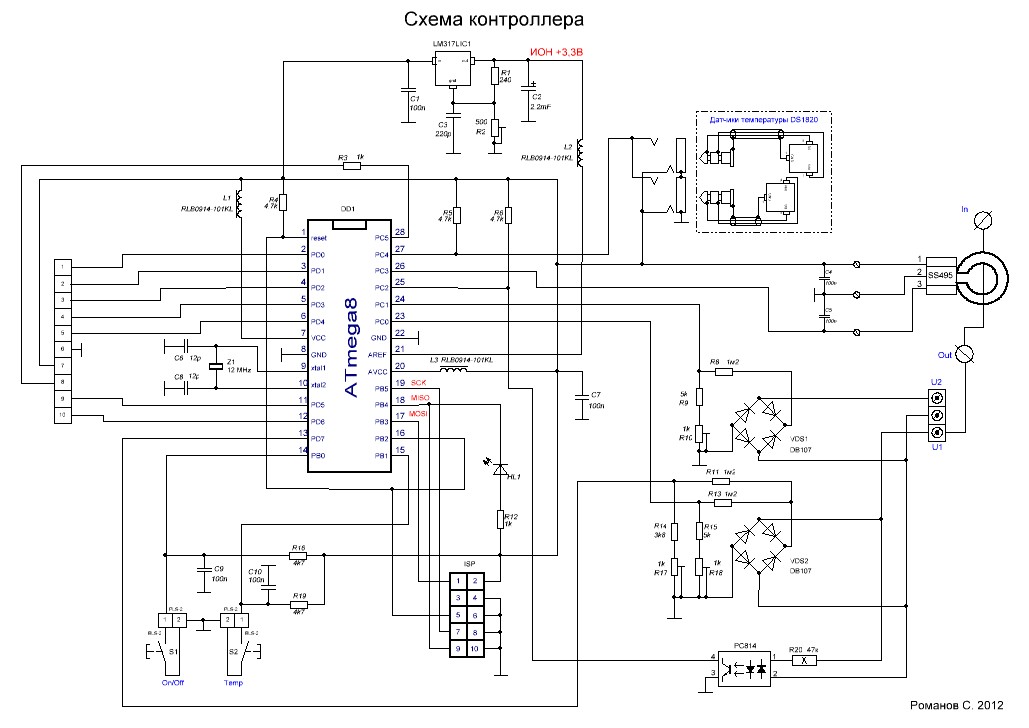
Двухканальный цифровой термостат: схема на контроллере Atmega8
Для сборки схемы термостата использовались такие детали, как: микроконтроллер Atmega8, цифровые датчики температуры DS18B20 и дисплей ЖКИ 2х16 знаков.
Программа для Atmega написана на ассемблере. В программе реализована поддержка шины 1wire для датчиков. Устройство не выполняет поиск или распознавание идентификационных номеров датчиков, каждый из них подключен к разному контакту микроконтроллера.
Таким образом к контроллеру можно подключить только два термодатчика, но в данном проекте этого достаточно. Кроме того, это решение значительно упростило программу.
Функции цифрового термостата
Термостат может быть запрограммирован с 8 рабочими параметрами, это рабочий режим, имеется 5 режимов:
- режим 1 — два независимых канала охлаждения
- режим 2 — два независимых канала, один охлаждающий, один нагревательный
- режим 3 — два независимых канала нагрева
- режим 4 — один дифференциальный канал охлаждения
- режим 5 — один дифференциальный канал нагрева
Пороговые значения температуры от T1 до T4 для включения или выключения выходов, в зависимости от режима работы. Ошибка I1, Ошибка I2, программирование выходное действие после отключения или выхода из строя датчика.
Подсветка дисплея также управляемая: включить подсветку, выключить подсветку, включить подсветку на 30 секунд после нажатия клавиши.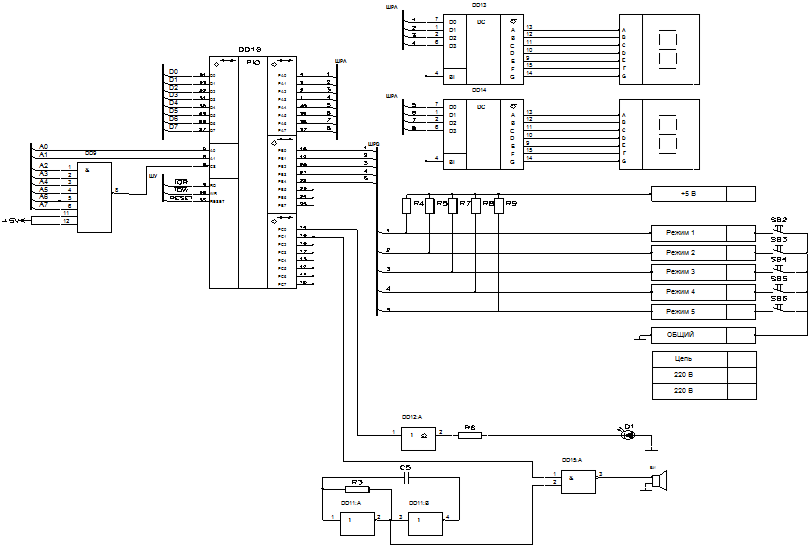
Параметры устанавливаются в меню, которое становится доступным после длительного удержания кнопки ввода. Во время нормальной работы на ЖК-дисплее отображается текущая температура и состояние выходов, а в режимах 4 и 5 также разница температур. Все параметры сохраняются в памяти EEPROM, поэтому они не теряются после сбоя питания.
Как выглядит алгоритм работы? Алгоритм просто сравнивает фактическую температуру с пороговыми значениями, установленными пользователем. При установке пороговых значений температуры программа следит за тем, чтобы:
- диапазон датчиков не превышался
- температура включения была выше температуры выключения (режим охлаждения) не менее чем на 0,5 C.
Все меню (8 параметров и возможность выхода из режима программирования) вместе с проверкой введенных параметров с учетом режима работы занимало больше места в памяти, чем основная программа. Основная программа — поддержка датчиков — считывание температуры, преобразование данных, отображение данных на дисплее.
Конструкция и сборка
Регулятор температуры построен на односторонней плате размером 65 x 100 мм, разработана в EAGLE. Несколько элементов, например микроконтроллер, расположены под дисплеем.
Выходы термостата представляют собой два реле 250 В 16 А, поэтому можно легко подключить к ним потребители на приличную мощность. Всё питается от 12 В постоянного тока. Термостат уже долго работает без сбоев.
Схемы на микроконтроллерах, программы на Ассемблере
Проект самодельного цифрового осцилографа с частотой выборки 20 МГц из недорогих деталей.
Проект АТС без соединительных линий: 32 абонента — 16 соединений!
Фомирователь ШИМ сигнала на микроконтроллере ATtiny13 (положительная и отрицательная полуволны генерируются отдельно).
Продолжение статьи «Формирователь синусоидаль-ного сигнала для питания двигателя переменного тока с регулировкой частоты».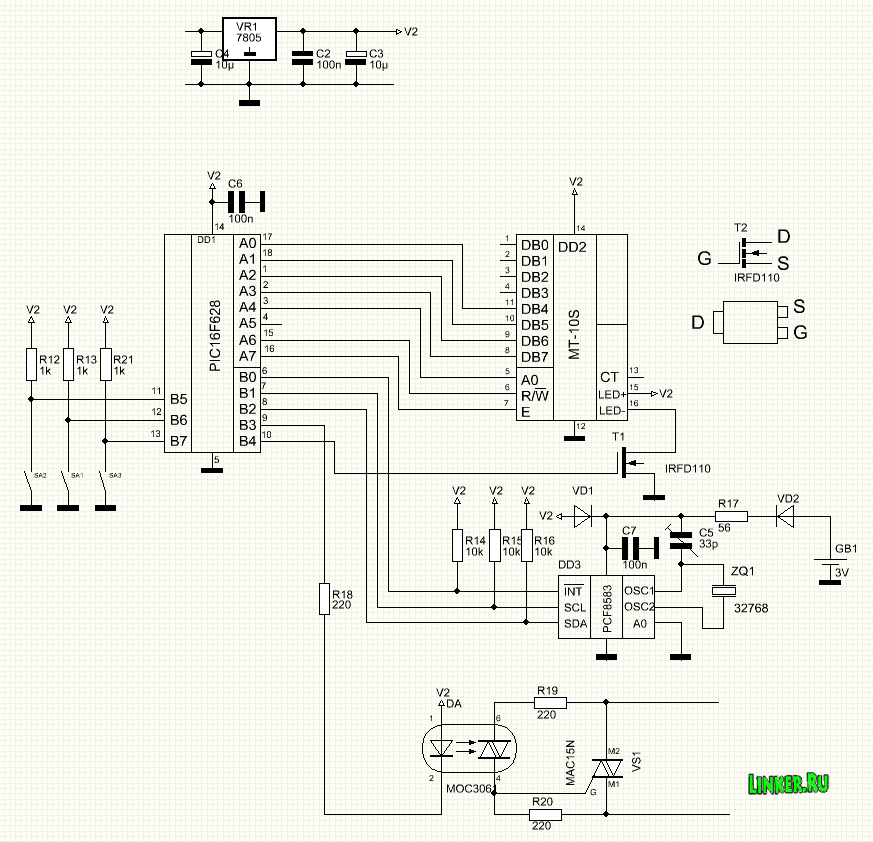
Повышающий регулятор напряжения по принципу ПИД регулятора ( пропорционально-интегрально-дифференциальный).
Продолжение темы (ПИД регулятор). Мощный понижающий регулятор напряжения с регулировкой выхода на микроконтроллере ATmega48.
Переписана и оптимизирована подпрограмма вычисления величины ШИМ. Повышена точность поддержания выходного напряжения, так как ШИМ теперь 10-ти разрядный, а не 8-ми, как раньше.
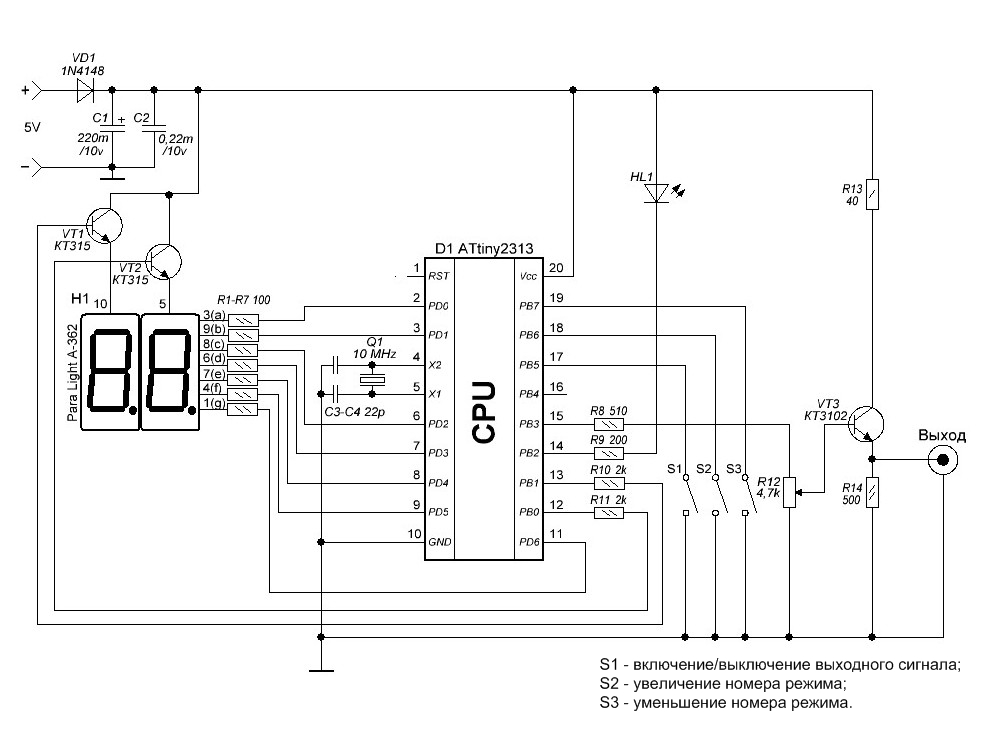
Вариант организации восьми «сухих» контактов на контроллере ATtiny2313.
Для оценки температуры используется величина сопротивления спирали
Прибор для обнаружения короткозамкнутых виков в намоточных изделиях.
Электронное лекарство от насморка.
Аппарат для обезболивания (антирадикулит).
Прибор для измерения величины и нестабильности частоты сердечных сокращений ЧСС (Тахиометр)/
Система принудительной посадки свободнолетающего планера.
Индикация и регулировка решена путем использования восьмиразрядного
сдвигового регистра U6 типа 74НС164.
Рассматриваемое устройство позволяет ознакомиться с одним из вариантов реализации усилителя класса D.
Хорошие возможности для реализации цветомузыки предоставляют микроконтроллеры, в частности, такой миниатюрный как Tiny15L
Четырехзначный счетчик приводится в варианте с контроллером ATtiny2313L, а шестизначный с ATmega48.
Значениям сопротивления соответствует определенная высота тона звука, издаваемого тестером.
Схема. Кабельный пробник на PIC-контроллерах
Описываемое устройство состоит из передатчика и приемника. На стороне первого концы проводов вставляют в пронумерованные зажимы, а на стороне второго щупом прикасаются к их другим концам. На цифровом табло приемника высвечивается номер зажима, к которому подключен тот или иной провод. Для определения номеров жил необходимо выявить одну из них и подключить ее к общему проводу приемника и передатчика.
Передатчик работает в режиме распределителя импульсов по десяти выводам микроконтроллера (МК). Каждый из них имеет свою константу, к которой прибавляются десятки в момент смены их кода. Для того чтобы все 80 циклов распределения импульсов производились за одно и то же время, каждый из них выполняется за время от одного прерывания до другого. Прерывания происходят по переполнению таймера TMR0. Он имеет предварительную установку коэффициента деления, выбранную таким образом, чтобы в промежуток между прерываниями поместились 80 выходных импульсов.
Каждый из них имеет свою константу, к которой прибавляются десятки в момент смены их кода. Для того чтобы все 80 циклов распределения импульсов производились за одно и то же время, каждый из них выполняется за время от одного прерывания до другого. Прерывания происходят по переполнению таймера TMR0. Он имеет предварительную установку коэффициента деления, выбранную таким образом, чтобы в промежуток между прерываниями поместились 80 выходных импульсов.
Рассмотрим алгоритм работы программы передатчика (рис. 1). После пуска программы и инициализации регистров обнуляется регистр десятков. Его значение переписывается в порт А для коммутации мультиплексоров. Далее разрешаются прерывания, и по двоичному числу десятков находится его десятичное значение, которое прибавляется к константе первого выхода. Константа (К) выхода определяется его номером: у первого она равна 1, у второго — 2, у десятого — 10. При нулевом значении десятков на каждом выходе появляется число импульсов, равное номеру выхода.
Далее программа проверяет регистр К на наличие нуля. Если его нет, из регистра вычитается единица, что сопровождается переключением выхода в единичное состояние. Затем выдерживается пауза продолжительностью 24 мкс, и выход переводится в нулевое состояние, которое длится 30 мкс (т. е. период колебаний равен 54 мкс). После этого программа проверяет регистр на ноль. Если регистр пустой, она переходит в режим ожидания прерывания, а если его значение не равно нулю, весь цикл формирования импульса на выходе повторяется. Таким образом, на выходе формируется число импульсов, которое было записано в регистр К.
После инициализации регистров включаются предделитель с коэффициентом деления 32 и таймер с коэффициентом деления, равным 137 (256 — 119). При частоте кварцевого резонатора 4 МГц прерывание по переполнению таймера должно происходить примерно через 4,38 мс (32-137 = 4384 мкс), но возврат из прерывания выполняется командой без разрешения прерывания. К этому времени прибавляется время циклов до разрешения прерывания и, собственно, время на само выполнение прерывания (общая средняя продолжительность этого времени равна 16 циклам). Кроме этого, предделитель обнуляется при каждой установке таймера, поэтому пауза между прерываниями составляет 4,4 мс. Как не трудно подсчитать, 80 периодов колебаний будут длиться 4,32 мс (54 мкс х 80 = 4320 мкс), т. е. это время укладывается в промежуток между прерываниями.
Кроме этого, предделитель обнуляется при каждой установке таймера, поэтому пауза между прерываниями составляет 4,4 мс. Как не трудно подсчитать, 80 периодов колебаний будут длиться 4,32 мс (54 мкс х 80 = 4320 мкс), т. е. это время укладывается в промежуток между прерываниями.
После переполнения таймера выполняется обычная процедура сохранения значений регистров при прерывании и прибавляется (возможно и вычитание) единица в счетчик прерываний. Значения этого счетчика не используются программой, а сам счетчик необходим для выполнения прерывания. Но его удобно использовать при отладке программы. После восстановления значений регистров разрешается прерывание для формирования импульсов со следующего выхода.
После того как сформированы импульсы на десятом выходе, регистр десятков увеличивается на единицу и весь цикл повторяется с команды записи двоичного кода десятков в порт А. В новом цикле число сформированных импульсов на каждом выходе увеличивается на десять. Когда значение десятков станет равно восьми, цикл формирования импульсов начнется с обнуления регистра десятков. Таким образом, максимальное значение десятков равно семи, а максимальное число импульсов будет на десятом выходе (10 + 70 = 80). Все 80 циклов прерываний длятся 0,352 с (4,4 мс х 80). Это время определяет гарантированную длительность паузы между выдачей импульсов на каждом выходе. Для одиночного импульса на первом выходе длительность паузы будет увеличена почти на время, равное времени между прерываниями, а для 80 импульсов на десятом выходе пауза между импульсами будет равна 0,352 с. Это необходимо отметить, чтобы лучше понять работу приемной части пробника.
Таким образом, максимальное значение десятков равно семи, а максимальное число импульсов будет на десятом выходе (10 + 70 = 80). Все 80 циклов прерываний длятся 0,352 с (4,4 мс х 80). Это время определяет гарантированную длительность паузы между выдачей импульсов на каждом выходе. Для одиночного импульса на первом выходе длительность паузы будет увеличена почти на время, равное времени между прерываниями, а для 80 импульсов на десятом выходе пауза между импульсами будет равна 0,352 с. Это необходимо отметить, чтобы лучше понять работу приемной части пробника.
Принципиальная схема передатчика кабельного пробника изображена на рис. 2. Все разряды порта В МК DD1 настроены на вывод и имеют коэффициенты от одного до восьми. Разряды RA0—RA2 используются для вывода значений регистра десятков в двоичном коде, RA3 и RA4 — как выходы с коэффициентами 9 и 10 соответственно. Поскольку выход RA4 имеет открытый сток, он нагружен резистором R1. Входы Y (вывод 3) мультиплексоров DD2—DD11 подключены к разрядам порта В, адресные входы (А, В, С) соединены параллельно и подключены к выходам десятков МК.
Таким образом, при нулевом значении регистра десятков на всех мультиплексорах будет выбран нулевой адрес, а на их выходах Х0 (вывод 13) будет появляться число импульсов, равное коэффициенту выхода МК, который подключен к входу Y мультиплексора. На выходе Х0 микросхемы DD2 будет постоянно присутствовать только один импульс, а на одноименном выходе DD11—10 импульсов. При увеличении адреса мультиплексора на единицу включится его следующий выход (Х1), а число импульсов на нем увеличится на десять. Таким образом, на каждом выходе мультиплексоров последовательно будет появляться только свое число импульсов. Нижний (по схеме) выход передатчика (Общ.) подключают, как отмечалось, к одному известному проводу, который будет общим для передатчика и приемника.
Приемник кабельного пробника работает по принципу двухразрядного счетчика. Алгоритм работы его программы показан на рис. 3, а принципиальная схема приемника кабельного пробника — на рис. 4. После пуска и инициализации программа переходит к выполнению динамической индикации двух светодиодных цифровых индикаторов с общим катодом. Время на индикацию одного индикатора равно 5 мс, т. е. весь цикл индикации повторяется с частотой 100 Гц.
Время на индикацию одного индикатора равно 5 мс, т. е. весь цикл индикации повторяется с частотой 100 Гц.
В приемнике используются два вида прерываний: по переполнению таймера TMR0 и от изменения сигнала на входе RB0. При поступлении импульса на этот вход сохраняются значения текущих регистров. Далее программа проверяет источник прерывания. Если оно произошло не по переполнению таймера, то инкрементируется счетчик импульсов, переустанавливается таймер (256 — 120 = 136) и сбрасывается счетчик предделителя. Программа восстанавливает значения регистров, и продолжается работа по индикации. Таким образом, при поступлении импульсов с входа RB0 таймер постоянно переустанавливается, поэтому прерывание от переполнения таймера невозможно до тех пор, пока на этом входе присутствуют импульсы.
Если же на входе длительное время импульсы отсутствуют, происходит прерывание от переполнения таймера. Для надежности работы приемника время между прерываниями немного уменьшено по сравнению с передатчиком и равно 4,38 мс. Прерывания от переполнения таймера подсчитываются счетчиком прерываний. Пауза между импульсами на каждом выходе передатчика равна 80 прерываниям, поэтому счетчик прерываний в приемнике может считать до 80. Если за это время не было входных импульсов, программа переписывает значения регистров счетчиков импульсов в регистры индикации и показания обновляются. Происходит это каждые 0,35 с.
Прерывания от переполнения таймера подсчитываются счетчиком прерываний. Пауза между импульсами на каждом выходе передатчика равна 80 прерываниям, поэтому счетчик прерываний в приемнике может считать до 80. Если за это время не было входных импульсов, программа переписывает значения регистров счетчиков импульсов в регистры индикации и показания обновляются. Происходит это каждые 0,35 с.
Коды «прошивок» МК передатчика и приемника приведены в табл. 1 и 2 соответственно.
Выходы RB1—RB7 МК DD1 коммутируют элементы (сегменты) светодиодных индикаторов HG1, HG2, выходы RA0, RA1 — их катоды. Импульсы со щупа поступают на вход RB0. Зажим Х1 подключают к известной жиле кабеля, которая служит общим проводом для приемника и передатчика. Если выход мультиплексора передатчика не выбран адресом, на нем будет присутствовать неопределенный уровень и при появлении импульсов на счетчике приемника будет одно ложное срабатывание (независимо от установленного перепада срабатывания счетчика: это может быть как перепад из нуля в единицу, так и из единицы в ноль). Чтобы не было ложных импульсов, вход зашунтирован резистором R1.
Питаются приемник и передатчик от батарей, составленных их трех элементов АА или ААА каждая. Если предполагается длительная работа с приемником, желательно использовать батарею типа 3R12Х.
В приемнике и передатчике применены кварцевые резонаторы на частоту 4 МГц. Без каких-либо изменений в схемах и программах можно использовать резонаторы с более низкой частотой, вплоть до 1 МГц. При этом соответственно уменьшится частота обновления показаний индикаторов, но она останется на приемлемом для глаз значении — до 25 Гц.
Передатчик монтируют на двух печатных платах, каждая из которых рассчитана на 40 выходов (вторая отличается от первой тем, что на ней отсутствует микросхема DD1 и предусмотрено место для установки резистора R1). Платы располагают одну под другой, соединяют с помощью винтов и резьбовых стоек, а между платами устанавливают пенал для трех элементов батареи питания (в зоне нахождения микросхемы DD1). Чертеж платы с микросхемой DD1 желающие найдут на сайте kabelprob.zip
Зажимы для подключения проводов на плате передатчика самодельные (рис. 5). Состоят они из двух одинаковых скоб 2, согнутых в виде буквы «Л» из полосок листовой бронзы или хорошо пружинящей латуни толщиной 0,4…0,5 и шириной 2,5 мм. Один из концов заготовок опиливают до ширины примерно 1 мм (на длине 1,5…2 мм в зависимости от толщины материала плат 1), в другом — сверлят отверстие диаметром 1,2 мм, после чего концы отгибают.
Опиленные части скоб впаивают в платы, как показано на рис. 5. Для подсоединения провода 3 нижний и верхний (по рисунку) концы скоб сжимают до совпадения отверстий. После монтажа зажимы нумеруют таким образом, чтобы, повернув передатчик (когда низ становится верхом, и наоборот), были видны их номера.
Post Views: 484
1.2. Контроллеры серии ККТ-60А. Схемы, диаграммы замыкания контактов.
ККТ-61А
Схема контроллера ККТ-61А.
Диаграмма замыкания контактов контроллера ККТ-61А.
Расположение контактов в контроллере ККТ-61А.
Схема электропривода с силовым контроллером типа ККТ-61А (фрагмент).
ККТ-62А
Схема контроллера ККТ-62А.
Диаграмма замыкания контактов контроллера ККТ-62А.
Расположение контактов в контроллере ККТ-62А.
Схема электропривода с силовым контроллером типа ККТ-62А (фрагмент).
ККТ-68А
Схема контроллера ККТ-68А.
Расположение контактов в контроллере ККТ-68А.
Диаграмма замыкания контактов контроллера ККТ-68А.
Схема электропривода с силовым контроллером типа ККТ-68А.
ККТ-63А
Схема контроллера ККТ-63А.
Расположение контактов в контроллере ККТ-63А.
Диаграмма замыкания контактов контроллера ККТ-63А.
Вариант схемы электропривода с силовым контроллером типа ККТ-63А.
ККТ-65А
Схема контроллера ККТ-65А.
Расположение контактов в контроллере ККТ-65А.
Диаграмма замыкания контактов контроллера ККТ-65А.
Вариант схемы электропривода с контроллером типа ККТ-65А и панелью управления ТРД.
ККТ-69А
Схема контроллера ККТ-69А.
Расположение контактов в контроллере ККТ-69А.
Диаграмма замыкания контактов контроллера ККТ-69А.
Вариант схемы электропривода с контроллером типа ККТ-69А, реверсором ДР160 и магнитным контроллером ТРД160.
Схемы подключения LED усилителей и контроллеров Мегапром
Электронный светодиодный RGB усилитель, он же контроллер-повторитель (RGB Data Repeater) предназначен для увеличения выходной мощности LED контроллеров (с ШИМ выходом и общим анодом «+V»).
RGB Усилитель сигнала выполняет роль «Ведомого» LED контроллера и получает сигнал от «Ведущего» LED контроллера , затем усиливает и передаёт сигнал на RGB светодиодные светильники. Усилители используются с одним RGB контроллером и позволяют увеличить количество подключаемых LED RGB устройств.
Амплитуда управляющего (от ведущего LED контроллера) напряжения должна быть не меньше рабочего выходного (питающего напряжения от блока питания) усилителя.
Существует несколько вариантов подключения LED усилителей мощности.
По данной схеме можно подключать LED светильники с одинаковым рабочим напряжением(DC 12V или DC24V), поскольку и котроллер и усилители питаются от одного блока питания. Мощность источника питания должна быть больше суммарной максимальной возможной мощности LED нагрузки на 20%(необходимый запас для защиты от перегрева). Недостаток данной схемы при импульсной нагрузке(наличие RC или LC фильтров в цепи схем стабилизации светильников) и динамическом режиме работы (смена цветов и яркости) происходят пульсации и колебания выходного напряжения, которые могут оказывать влияние на устойчивость работы как LED усилителей, так и ведущего LED контроллера.
В данной схеме Светодиодный контроллер и LED усилители имеют независимые источники питания, что позволяет уменьшив влияние динамической нагрузки стабильность работы устройств управления. А также повышает надежность всей системы, в случае выхода из строя одного из Блоков питания(источников питания) или КЗ в цепи нагрузки светильников.
Мощность блоков питания определяется мощностью светильников в соответствующей линии до LED усилителя + 20%(необходимый запас мощности для защиты от перегрева). Т.е мощность блока питания LED усилителя определяется мощностью LED нагрузки подключенной к выходу усилителя. Мощность блока питания LED контроллера определяется мощностью потребления контроллера(несколько Ватт) и усилителей (несколько Ватт) , если к LED контроллеру подключена еще LED нагрузка напрямую(без усилителей), то ее тоже надо учесть.
Возможны также комбинированные схемы (Подключение 1+ Подключение 2), когда контролер питается от маломощного блока питания, а усилители от единого мощного блока питания.
Кроме того данная схема позволяет реализовать синхронную работу от одного LED контроллера светодиодной нагрузки с разным рабочим напряжением, например динамическую подсветку со светильниками DC12V и DC24V (см. Подключение 3)
Внимание: Для устойчивой работы LED усилителя амплитуда управляющего (от ведущего контроллера) напряжения должна быть не меньше рабочего выходного (питающего от блока питания) усилителя. Таким образом при синхронизации работы светильников с рабочим напряжением DC 12V и DC 24V управляющее напряжение с контроллера (на усилители) должно быть 24V.
Общие требования по эксплуатации
-
Используемые блоки питания должны иметь запас мощности не менее 20%.
Соблюдайте полярность при подключении RGB -светильников, и блоков питания к усилителю. -
На LED усилителе клемник, имеющий 4 контакта для подключения — это вход, 4 контакта для подключения — это выход и 2 контакта для питания.
-
LED Усилитель используется только с одним RGB-контроллером и предназначен для увеличения числа подключаемых RGB-модулей LED светильников
Высокая загрузка ЦП на контроллерах доменов в лесу Active Directory под управлением Windows Server 2008 R2 после обновления схемы
Сведения об исправлении
Чтобы устранить эту проблему, данное исправление на всех контроллерах домена в лесу.
Это исправление представляет новую возможность, позволяющая администраторам леса отложить создание индекса на момент времени, они решить. По умолчанию контроллеры домена создавать индексы при получении соответствующей схемы изменения посредством репликации. После установки данного исправления можно отложить создание индекса с помощью нового атрибута dSHeuristics. Этого атрибута имеют следующие характеристики:
-
Девятнадцатый байт атрибута dSHeuristics установлено значение 1 , пока не происходит следующее:
-
Контроллер домена получает UpdateSchemaNow rootDSE mod. Это вызывает повторное создание кэша схемы.
-
Перезагрузки контроллера домена. Для этого необходимо перестроить кэш схемы и, в свою очередь отложенных индексы перестраиваются.
Дополнительные сведения об атрибуте dSHeuristics посетите следующий веб-узел корпорации Майкрософт:
-
-
Любой атрибут, находящийся в состоянии отложенного индекс регистрируется в журнале событий каждые 24 часа. В частности соответствующим образом регистрируются следующие события:
-
2944: индекс отложена (системе один раз)
Сообщение о событии следующего вида:Индекс изменения, связанные с изменением схемы откладываются.
-
2945: индекс все еще ожидает (вход каждые 24 часа)
Сообщение о событии следующего вида:Индекс изменения, связанные с предыдущего изменения схемы, по-прежнему ожидается. Это потому, что установить флаг эвристический ds леса fDisableAutoIndexingOnSchemaUpdate. Этот флаг, когда набор, отключение автоматического индексирования существующих атрибутов на обновление схемы. Для обеспечения оптимальной производительности с этого контроллера домена, принудительного создания индекса в результате изменения атрибута rootDSE schemaUpdateNow и присвойте ему значение 1. Это поведение можно также отключить, сбросив dsHeuristic fDisableAutoIndexingOnSchemaUpdate 0, затем контроллеры домена под управлением Windows Server 2008 R2 с пакетом обновления 1 или позже будет автоматически перестроить индексы как они получат это изменение.
-
1137: индекс создан (системе один раз)
Примечание. Это не новое событие.
-
Существует исправление от корпорации Майкрософт. Однако данное исправление предназначено для устранения только проблемы, описанной в этой статье. Применяйте это исправление только в тех случаях, когда наблюдается проблема, описанная в данной статье. Это исправление может проходить дополнительное тестирование. Таким образом если вы не подвержены серьезно этой проблеме, рекомендуется дождаться следующего пакета обновления, содержащего это исправление.
Если исправление доступно для скачивания, имеется раздел «Пакет исправлений доступен для скачивания» в верхней части этой статьи базы знаний. Если этот раздел не отображается, обратитесь в службу поддержки для получения исправления.
Примечание. Если наблюдаются другие проблемы или необходимо устранить неполадки, вам может понадобиться создать отдельный запрос на обслуживание. Стандартная оплата за поддержку будет взиматься только за дополнительные вопросы и проблемы, которые не соответствуют требованиям конкретного исправления. Для получения полного списка телефонов поддержки и обслуживания клиентов корпорации Майкрософт, или для создания отдельного запроса на обслуживание, посетите следующий веб-сайт Майкрософт:
Примечание. В форме «Пакет исправлений доступен для скачивания» отображаются языки, для которых доступно исправление. Если нужный язык не отображается, значит исправление для данного языка отсутствует.
Предварительные условия
Это исправление необходимо использовать Пакет обновления 1 (SP1) для Windows Server 2008 R2.
Для получения дополнительных сведений о получении пакета обновления для Windows 7 или Windows Server 2008 R2 см. следующую статью базы знаний Майкрософт:
Сведения о пакете обновления 1 для Windows 7 и Windows Server 2008 R2
Сведения о реестре
Для установки этого исправления нет необходимости вносить изменения в реестр.
Необходимость перезагрузки
После установки исправления компьютер необходимо перезагрузить.
Сведения о замене исправлений
Это исправление не заменяет ранее выпущенные исправления.
Motors, Motor Circuits and Controllers, Part II: Article 430
Требования к двигателям, компонентам двигателей и контроллерам можно найти в ряде статей Национального электрического кодекса (NEC), но статья 430 конкретно касается двигателей, отрасли двигателей: цепи и фидерные провода и их защита, защита двигателя от перегрузки, цепи управления двигателем, контроллеры двигателей и центры управления двигателями (MCC) [430.1].
Хотя некоторые термины, относящиеся к двигателям, определены в 430.2, статья 100 определяет другие термины, связанные с двигателями, и указывает причину этого в ее объеме. В целом, статья 100 определяет термины, используемые только в двух или более статьях.
Статья 100 определяет эти семь терминов, относящихся к двигателям: привод с регулируемой скоростью, система приводов с регулируемой скоростью, цепь управления, центр управления двигателем, переключатель управления двигателем, тепловая защита (применительно к двигателям) и термическая защита (применительно к двигателям). В статье 430 эти термины не определяются, поскольку они используются по крайней мере в одной дополнительной статье.Как определено в статье 100, MCC — это сборка из одной или нескольких закрытых секций, имеющих общую шину питания и в основном содержащих блоки управления двигателями (см. Рисунок 1).
Статья 430 определяет четыре термина, относящиеся к двигателям: «контроллер», «двигатели с частичной обмоткой», «оборудование для отключения системы» и «узлы двигателя с приводом клапана (VAM)».
Интересно, что и статья 100, и статья 430 определяют термин «контролер». В Статье 100 контроллер определяется как устройство или группа устройств, которые служат для управления некоторым заранее определенным образом электрической мощностью, подаваемой в устройство, к которому он подключен.«Контроллер» встречается в Кодексе более 500 раз. При использовании в Статье 430 применимо определение из 430.2. Для целей статьи 430 контроллер — это любой переключатель или устройство, которое обычно используется для запуска и остановки двигателя путем включения и отключения тока в цепи двигателя [430.2].
Вместо простого использования термина «контроллер» в Кодексе также используется термин «контроллер двигателя». Определение «контроллер» в 430.2 также применимо к «контроллеру двигателя». В то время как NEC использует термины «контроллер» или «контроллер двигателя», в данной области обычно используются термины «стартер» или «пускатель двигателя».”
Требования к контроллерам двигателей указаны в статье 430 части VII; соответствующие разделы — с 430.81 по 430.90. В соответствии с 430.82 (C) контроллер двигателя для стационарных двигателей мощностью 2 лошадиных силы (л.с.) или меньше и 300 В (В) или меньше может быть переключателем общего назначения или переключателем общего назначения при определенных условиях. Согласно Статье 100, выключатель общего назначения предназначен для использования в общих распределительных и распределительных цепях. Он рассчитан в амперах (A) и способен отключать номинальный ток при номинальном напряжении.В полевых условиях выключатель общего назначения обычно называют «разъединителем», «разъединителем» или «предохранительным выключателем». Статья 100 определяет мгновенные переключатели общего назначения как форму переключателей общего назначения, сконструированных таким образом, чтобы их можно было устанавливать в коробках устройств или на крышках коробок или иным образом использовать в сочетании с системами электропроводки, признанными NEC. Требования к обоим типам переключателей указаны в статье 404.
Если в качестве контроллера мотора установлен выключатель общего назначения или мгновенный выключатель общего назначения, он должен иметь номинальную силу тока, равную 430.82 (C) уточняет. Для некоторых двигателей контроллер двигателя может быть выключателем общего назначения (разъединителем), если номинальный ток разъединителя как минимум в два раза превышает номинальный ток полной нагрузки (FLC) двигателя [430,82 (C) (1)].
Например, разъединитель или предохранительный выключатель будет установлен в качестве контроллера двигателя для стационарных двигателей мощностью 2 л.с. или меньше и 300 В или меньше. Этот разъединитель будет иметь номинальный ток 30 А. Максимальный FLC двигателя, допустимый для этого разъединителя, составляет 15 А (30 ÷ 2 = 15).
Для некоторых двигателей в цепях переменного тока (AC) контроллер двигателя также может быть универсальным переключателем мгновенного действия, если переключатель подходит только для использования на переменном токе (не переключатели постоянного / переменного тока общего назначения) и если двигатель FLC номинальный ток не превышает 80 процентов от номинального тока коммутатора [430.82 (С) (2)].
Например, мгновенный выключатель переменного тока общего назначения будет установлен в качестве контроллера двигателя для стационарного двигателя мощностью 2 л.с. или менее и 300 В или менее. Этот универсальный мгновенный переключатель переменного тока будет иметь номинальный ток 20 А. Максимальный ток FLC двигателя, разрешенный для этого переключателя, составляет 16 А (20 × 80 процентов = 16) (см. Рисунок 2).
Контроллеры двигателейтакже могут быть пускателями двигателей, комбинированными пускателями двигателей, ручными пускателями двигателей, автоматическими выключателями с обратнозависимой выдержкой времени и выключателями в литом корпусе. Контроллер мотора должен иметь рейтинг 430.83 (A) указывает, если иное не разрешено в 430.83 (B) или (C) или как указано в (D), при определенных условиях. В соответствии с положениями 430,83 (A) (1), контроллеры, кроме автоматических выключателей с обратнозависимой выдержкой времени и переключателей в литом корпусе, должны иметь номинальную мощность в лошадиных силах при напряжении приложения не ниже, чем мощность двигателя.
Некоторые пускатели двигателей имеют выключатель, например выключатель. Статья 100 определяет «выключатель цепи двигателя» как выключатель с номинальной мощностью, который способен отключать максимальный рабочий ток перегрузки двигателя той же мощности, что и выключатель, при номинальном напряжении.В соответствии с 404.13 (D), выключатели цепи двигателя должны быть ножевого типа (см. Рисунок 3).
Промышленная панель управления — это элемент оборудования, который довольно часто используется с двигателями. Согласно Статье 100 промышленная панель управления представляет собой сборку из двух или более компонентов, состоящих из одного из следующих компонентов: (1) только компоненты силовой цепи, такие как контроллеры двигателей, реле перегрузки, разъединители с предохранителями и автоматические выключатели; (2) только компоненты схемы управления, такие как кнопки, контрольные лампы, селекторные переключатели, таймеры, переключатели и реле управления; (3) комбинация компонентов цепи питания и управления.Эти компоненты вместе с соответствующей проводкой и клеммами монтируются на корпусе, содержатся внутри него или монтируются на субпанели.
Определение продолжается, заявляя, что промышленная панель управления не включает управляемое оборудование. Хотя промышленные панели управления могут содержать оборудование (например, контроллеры двигателей), указанное в статье 430, сама промышленная панель управления не упоминается в статье 430. Статья 409 охватывает промышленные панели управления, предназначенные для общего использования и работающие при напряжении 1000 В или ниже ( см. рисунок 4).
Некоторые двигатели и контроллеры не только должны соответствовать применимым положениям статьи 430, но также должны соответствовать применимым положениям другой статьи. Таблица 430.5 помогает определить, нужно ли будет искать дополнительные требования в другой статье из-за типа двигателя, моторного оборудования или типа занятости.
Например, снаружи будет установлен кондиционер. Эта установка будет иметь мотор-компрессор и мотор-вентилятор конденсатора.Чтобы узнать, нужно ли искать дополнительные положения в другой статье, изучите Таблицу 430.5. Верхняя строка в таблице 430.5 показывает, что оборудование для кондиционирования воздуха и холодильное оборудование должно соответствовать применимым положениям статьи 440. Следовательно, двигатели в оборудовании для кондиционирования воздуха и холодильном оборудовании должны соответствовать применимым положениям статей 430 и 440. Применяются положения статьи 440. к оборудованию для кондиционирования воздуха и охлаждения с электроприводом, а также к параллельным цепям и контроллерам такого оборудования.
Статья 440 также предусматривает особые соображения для контуров питания герметичных мотор-компрессоров хладагента и для любого оборудования для кондиционирования воздуха или холодильного оборудования, которое питается от ответвленной цепи, которая питает герметичный мотор-компрессор хладагента.
В колонке следующего месяца продолжается обсуждение требований к двигателям, цепям двигателей и контроллерам.
Артикул 430: Двигатели, схемы двигателей и контроллеры
Статья 430 Двигатели, схемы двигателей и контроллеры
И.Общий
В этой статье рассматриваются требования к двигателям, параллельным цепям двигателя и фидерам и их защите, защите двигателя от перегрузки, цепям управления двигателем, контроллерам двигателя и центрам управления двигателями. Есть общие и частные требования. Рисунок 430.1 в NEC® описывает, где в статье 430 рассматриваются различные части схем, а также другие статьи. Эта статья не распространяется на оборудование для кондиционирования воздуха и холодильное оборудование, охватываемое статьей 440, и центры управления двигателями, охватываемые статьей 110.26 (F).
|
430,2 |
Определения |
|
430,4 |
Двигатели с частичной обмоткой |
|
430,5 |
Прочие статьи |
Есть множество других товаров, которым двигатели и контроллеры должны соответствовать в особых случаях.Они указаны в таблице 430.5.
|
430,6 |
Определение емкости и номинальной мощности двигателя |
Обычно размер проводника определяется с помощью таблиц допустимых значений токов, указанных в разделе 310.15 (B), или рассчитывается, как указано в разделе 310.15 (C). Используйте Раздел 400.5, чтобы определить размер жилы гибкого шнура.
(A) Применение двигателей общего назначения.Таблицы с 430.147 по 430.150 используются для определения номинального тока сечения проводов, переключателей, защиты цепей и т. П. (А не номиналов на паспортной табличке). Если двигатель имеет маркировку в амперах, но не в лошадиных силах, предполагается, что номинальная мощность в лошадиных силах соответствует значениям в таблицах 430.247–250. Двигатели со скоростью менее 1200 об / мин и двигатели с высоким крутящим моментом могут иметь более высокие токи полной нагрузки. Многоскоростные двигатели имеют токи полной нагрузки, которые зависят от скорости. В этих случаях используйте номинальные значения тока, указанные на паспортной табличке.Есть три исключения. Отдельная защита двигателя от перегрузки основана на показаниях паспортной таблички.
(B) Моментные двигатели. Номинальный ток, используемый для этих двигателей, представляет собой ток заторможенного ротора. Значение, указанное на паспортной табличке, используется для определения сечения проводников параллельной цепи, как указано в разделах 430.22 и 430.24, номинала защиты от перегрузки, номинала защиты двигателя от перегрузки и номинала защиты от короткого замыкания и замыкания на землю .
(C) Двигатели переменного тока с регулируемым напряжением.Для этих типов двигателей используйте максимальный рабочий ток, указанный на двигателе. Если маркировки нет, используйте 150% значений в таблицах 430.149 и 430.150.
|
430,7 |
Маркировка двигателей и многомоторного оборудования |
|
430,8 |
Маркировка контроллеров |
|
430.9 |
Клеммы |
|
430,10 |
Место для проводов в шкафах |
Таблица 430.10 (B) указывает минимальное пространство для изгиба проводов на клеммах закрытых двигателей.
|
430,11 |
Защита от жидкостей |
|
430.12 |
Корпуса клемм двигателя |
В таблицах 430.10 (B), 430.12 (B), 430.12 (C) (1) и 430.12 (C) (2) указаны различные требования к размерам и пространству. Также есть информация о подключениях.
|
430,13 |
Втулка |
|
430,14 |
Расположение двигателей |
|
430.16 |
Воздействие скопления пыли |
|
430,17 |
Двигатель с наивысшим или наименьшим номиналом |
Если это должно быть определено на соответствие разделам 430.24, 430.53 (B) и 430.53 (C), используйте номинальный ток полной нагрузки из таблиц 430.147, 430.148, 430.149 и 430.150.
|
430.18 |
Номинальное напряжение выпрямительных систем |
II. Проводники цепи двигателя
Правила этой части распространяются на цепи питания двигателей напряжением 600 В или меньше.
Обычно сечение проводов рассчитано на 125% номинального тока двигателя при полной нагрузке, как указано в Разделе 430.6 (A) (1) для питания одного двигателя, рассчитанного на продолжительную работу. Есть исключение из этого правила.Он предназначен для двигателей постоянного тока, которые работают от однофазного источника питания с выпрямителем. Существуют правила для многоскоростных двигателей, двигателей со звездообразным пуском, треугольника и двигателей с частичной обмоткой. Когда разрешается отсоединять распределительную коробку от двигателя, делается особое исключение для сечения проводов на двигателях мощностью 1 л.с. или меньше. Существуют положения для двигателей, не работающих в непрерывном режиме.
|
430,23 |
Вторичный ротор с обмоткой |
Вторичные выводы для двигателя с непрерывным режимом работы с фазным ротором должны быть рассчитаны как минимум на 125% вторичного тока полной нагрузки.Если двигатель не непрерывный, следует использовать Таблицу 430.22 (E). Таблица 430.23 (C) используется, когда вторичный резистор отделен от контроллера.
|
430,24 |
Несколько двигателей или двигатель (и) и другая нагрузка (и) |
В этом случае проводники рассчитаны на 125% от тока полной нагрузки самого большого двигателя (такого же, как у одиночного двигателя) плюс ток полной нагрузки всех дополнительных двигателей плюс номинальный ток других нагрузок, которые рассчитываются в соответствии со статьей 430.6 (A) и другие разделы NEC®. Есть три исключения: непрерывный режим, обогрев фиксированных помещений с электроприводом и моторы с блокировкой.
|
430,25 |
Мультимоторное и комбинированное оборудование |
Проводники для этих нагрузок основаны, как минимум, на допустимой токовой нагрузке цепи, указанной на оборудовании в соответствии с разделом 430.7 (D). Если оборудование не подключено на заводе, а паспортные таблички видны в соответствии с Разделом 430.7 (D) (2), проводники рассчитываются в соответствии с Разделом 430.24.
|
430,26 |
Коэффициент потребности питателя |
Если все двигатели не будут работать одновременно по любому количеству причин, компетентный орган может разрешить использование коэффициента спроса.
|
430,27 |
Конденсаторы с двигателями |
|
430,28 |
Отводы питателя |
Провода ответвлений фидера должны иметь размер не менее, чем в Части II этого раздела, быть закрытыми и иметь длину 3,0 м (10 футов) или меньше, либо составлять одну треть или более номинала фидера, 7 .Длиной 5 м (25 футов) или менее и защищенными или имеющими допустимую нагрузку не менее, чем проводники фидера. Исключение составляют отводы питателя длиной более 7,5 м (25 футов) в производственных зданиях с высокими пролетами. Есть дополнительные правила.
|
430,29 |
Двигатели постоянного напряжения постоянного тока Силовые резисторы |
III. Защита двигателя и параллельной цепи от перегрузки
Защита от перегрузки обычно связана с тепловыми перегрузками в контроллере или пускателе.Не следует путать с защитой от короткого замыкания, которая представляет собой предохранитель или автоматический выключатель в щитке. Следует ссылаться на диаграмму 430.1 Кодекса, а также на Приложение D, Пример № D8.
|
430,32 |
Двигатели непрерывного действия |
Допустимы четыре метода:
(A) Более 1 лошадиных сил
1.Необходимо использовать отдельное устройство защиты от перегрузки. Он должен быть рассчитан не более чем на 125% от номинального значения двигателя, указанного на паспортной табличке, если двигатель рассчитан на превышение температуры не более 40 ° C или эксплуатационный коэффициент 1,15 или более. Для всех остальных двигателей рейтинг снижен до 115%. Исключения приведены в Разделе 430.32 (C).
2. Термозащитные устройства как часть двигателя перечислены в этом параграфе.
3. Если двигатель является частью одобренной сборки, обычно не имеет перегрузок и имеет некоторую защиту от отказа при запуске, дополнительная защита от перегрузки не требуется.
4. В этом параграфе рассматриваются двигатели мощностью более 1500 л.с.
(B) Одна или менее лошадиных сил, запускается автоматически. Здесь снова есть четыре приемлемых метода; первые три аналогичны первым трем для двигателей мощностью более 1 л.с. К ним относятся отдельные устройства (указаны номиналы), тепловые защиты и случаи, когда не требуется никакой дополнительной защиты, кроме защиты параллельной цепи (когда защита встроена в двигатель).Четвертый случай — это когда полное сопротивление двигателя защищает от перегрева, когда двигатель не запускается.
(C) Выбор реле перегрузки. В случае, если номинальные параметры, выбранные в соответствии с перечисленными в Разделе 430.32 (a) (1) и (c) (1), не позволяют двигателю запуститься, в этом разделе указаны более высокие допустимые значения.
(D) Одна лошадиная сила или меньше, запускается неавтоматически. Если он не установлен стационарно, то, если он находится в пределах видимости от расположения контроллера, достаточно защиты от замыкания на землю и короткого замыкания в параллельной цепи.Следует использовать размеры, указанные в Части IV. Это может быть цепь 120 В с номиналом 20 А или меньше. Если контроллер не находится в поле зрения или установлен постоянно, он должен соответствовать Разделу 430.32 (B). При стационарной установке соблюдайте 430.32 (B).
(E) Вторичные обмотки ротора. Они могут быть защищены устройством защиты двигателя от перегрузки.
|
430,33 |
Непостоянная и аналогичная работа |
Вы можете отказаться от отдельной защиты от перегрузки для этих типов двигателей и использовать только устройство защиты от параллельного замыкания, короткого замыкания и замыкания на землю.
|
430,35 |
Маневрирование в начальный период |
Бывают случаи, когда защиту от перегрузки можно шунтировать во время запуска.
|
430,36 |
Предохранители , в каком проводнике |
При использовании в качестве защиты от перегрузки вставьте по одному в каждый незаземленный провод, а также в заземленный провод, если питание трехфазное, трехпроводное переменное с одной заземленной фазой.
|
430,37 |
Устройства, кроме предохранителей, в проводнике которых |
В таблице 430.37 приведены требования.
|
430,38 |
Количество проводов, размыкаемых устройствами перегрузки |
Число открываемых проводов должно предотвращать попадание тока в двигатель для устройств, отличных от предохранителей или тепловой защиты.
|
430,39 |
Контроллер двигателя как защита от перегрузки |
Это разрешено, если в соответствии с таблицей 430.37 оператор находится в рабочем положении, а также в исходном положении для двигателя переменного тока.
Если устройство, используемое для защиты двигателя от перегрузки, не может устранить короткое замыкание, оно должно быть защищено либо предохранителями, либо автоматическими выключателями, либо устройством защиты двигателя от короткого замыкания, размер которого указан в разделе 430.52. Есть одно исключение для установок группы rulegroup, где используется реле перегрузки.
|
430,42 |
Двигатели в ответвленных цепях общего назначения |
В этом разделе указывается, какая защита от перегрузки должна использоваться, когда двигатели подключены к параллельным цепям общего назначения. Он также должен соответствовать статье 210.
(A) Не более 1 лошадиных сил.Может быть подключен без защиты от перегрузки, если соблюдаются правила Раздела 430.32 (B) и (D) и Раздела 430.53 (A) (1) и (A) (2).
(B) Более 1 лошадиных сил. Каждый двигатель должен иметь защиту от перегрузки, как указано в разделе 430.32.
(C) Подключены шнуром и вилкой. Если защита от перегрузки не предусмотрена, как в пункте (а) выше, номинальные параметры вилки и розетки не могут превышать 15 А 125 В или 10 А 250 В. Если требуется защита, как в пункте (b) выше, устройство защиты от перегрузки должно быть частью двигателя или устройства.
(D) Задержка по времени. В устройствах ответвления цепи и защиты от замыканий на землю должна быть предусмотрена временная задержка, чтобы двигатель мог запуститься.
|
430,43 |
Автоматический перезапуск |
|
430,44 |
Заказное отключение |
Если для защиты людей необходимо упорядоченное отключение, а не быстрое размыкание цепи, устройство защиты от перегрузки может быть подключено к системе аварийной сигнализации, а не размыкать цепь в соответствии с положениями этого раздела.
IV. Защита от короткого замыкания и замыкания на землю двигателя
|
430,51 |
Общий |
|
430,52 |
Рейтинг или настройка для отдельной цепи двигателя |
Устройство должно пропускать пусковой ток. Таблица 430.152 перечислены максимальные настройки защитных устройств. Если значения в таблицах не соответствуют устройству стандартного размера, рейтинг может быть повышен до следующего наивысшего рейтинга. Если номинальные значения в таблице не позволяют двигателю запуститься, номинальные значения можно увеличить следующим образом:
1. Предохранитель с немедленной задержкой менее 601 А до 400% тока полной нагрузки
2. Предохранители с выдержкой времени до 225% от тока полной нагрузки
3.Автоматические выключатели (обратнозависимые) до 400% для токов полной нагрузки до 100 А и 300% для больших токов
4. Предохранители от 601 до 6000 A до 300% тока полной нагрузки
В этом разделе также перечислены правила, в которых можно использовать автоматические выключатели мгновенного срабатывания и устройства защиты двигателя от короткого замыкания; правила для многоскоростных двигателей; многоскоростной мотор; силовые электронные устройства; правила для моментных двигателей; и правила для фазопреобразователей.Если производитель указывает максимальный рейтинг, его нельзя превышать. Читатель может найти полную информацию в этом разделе Кодекса.
|
430,53 |
Несколько двигателей или нагрузок в одной ответвленной цепи |
В этом разделе указывается, при каких условиях два или более двигателей или комбинированные нагрузки разрешены в одной ответвленной цепи.
(А) Если ни один из двигателей не превышает 1 л.с., цепь защищена током 20 А при 120 В или не более 15 А при 600 В, ток полной нагрузки каждого двигателя не превышает 6 А, Индивидуальная защита от перегрузки соответствует требованиям Раздела 430.32, и номинальные характеристики, указанные на любом контроллере для защиты от короткого замыкания в параллельной цепи и замыкания на землю, не превышаются, более одного двигателя или комбинированных нагрузок допускается на одной ответвленной цепи.
(B) Когда номинальные характеристики устройств защиты от короткого замыкания и замыкания на землю не превышают требуемых для самого маленького двигателя, и все двигатели имеют индивидуальную защиту от перегрузки, и комбинированная нагрузка будет работать в этих условиях, более одного двигателя или допустимы комбинированные нагрузки.
(C) Групповая установка более одного двигателя или комбинированных нагрузок разрешена в одной ответвленной цепи, если устройства защиты от перегрузки и контроллеры двигателей находятся в заводской сборке, указанной в списке, а защита двигателя от короткого замыкания и замыкания на землю присутствует в сборке или указана на Ассамблея; или если контроллеры, устройства защиты от перегрузки, ответвления цепи, короткого замыкания и защиты от замыканий на землю устанавливаются отдельно друг от друга в соответствии с инструкциями производителя по использованию друг с другом и выполняются следующие условия:
1.Устройство защиты от перегрузки должно быть одобрено для групповой установки и иметь указанный максимальный номинал предохранителя или автоматический выключатель с обратнозависимой выдержкой времени, или и то, и другое.
2. Контроллер мотора для каждого мотора должен соответствовать тем же правилам, что и в (1) выше.
3. Автоматические выключатели должны быть указаны в списке и иметь характеристики с обратнозависимой выдержкой времени.
4. Номинал предохранителя или автоматического выключателя для параллельной цепи должен соответствовать правилам Раздела 430.52 и 240,3 (В). Он должен быть не ниже значения раздела 430.52 для самого большого двигателя и суммы номинальных значений полной нагрузки других двигателей и нагрузок.
5. Номинальные характеристики, разрешенные в Разделе 430.40 для самого маленького двигателя, также будут максимальными для предохранителей параллельной цепи или автоматических выключателей с обратнозависимой выдержкой времени.
6. Для нагрузок, отличных от двигателей, максимальная токовая защита соответствует Частям с I по VII статьи 240.
(D) При групповой установке, как описано в пункте (c) выше, если провода к любому отдельному двигателю не больше, чем проводники ответвленной цепи, или не менее одной трети номинала проводников ответвленной цепи в соответствии с с разделом 430.22, но не дальше 7,5 м (25 футов) от контроллера и с физической защитой, то установка не потребует защиты отдельных ответвлений от короткого замыкания и замыкания на землю.
|
430.54 |
Мультимоторное и комбинированное оборудование |
Номинальные параметры устройства защиты от короткого замыкания и замыкания на землю не должны превышать номинальных значений, указанных на оборудовании, и соответствовать Разделу 430.7 (D).
|
430,55 |
Комбинированная максимальная токовая защита |
До тех пор, пока номинальное значение не превышает требуемого для защиты от перегрузки в Разделе 430.32, защита от короткого замыкания и замыкания на землю и защита от перегрузки могут быть в одном устройстве.
|
430,56 |
Устройства защиты ответвленных цепей, в которых находится проводник |
|
430,57 |
Размер держателя предохранителя |
|
430.58 |
Рейтинг автоматического выключателя |
В. Защита фидера двигателя от короткого замыкания и замыкания на землю
|
430,61 |
Общий |
|
430,62 |
Номинальная мощность или настройка Нагрузка двигателя |
Номинал должен соответствовать максимальному защитному устройству параллельной цепи плюс токи полной нагрузки всех других двигателей.Если были установлены более крупные питатели для будущего расширения, номинал может быть таким же, как у питателя. См. Разделы 430.52 и 440.22 (A). Есть два исключения и дополнительные требования.
|
430,63 |
Номинальные значения или настройки Мощность и световые нагрузки |
Когда комбинированные нагрузки устанавливаются в одном питателе, номинальной мощности может быть достаточно, чтобы выдержать нагрузку освещения и прибора, а также нагрузку, разрешенную Разделом 430.52 для одного двигателя и Раздел 430.62 для более чем одного двигателя и 440.22 для одного герметичного мотор-компрессора с хладагентом. Есть исключение для центра управления моторикой.
VI. Цепи управления двигателем
Эта часть применяется к конкретным условиям и содержит изменения общих требований к цепям управления двигателем.
|
430,72 |
Максимальная токовая защита |
Если цепь отключена со стороны нагрузки устройства защиты параллельной цепи, она должна иметь защиту, указанную в разделе 430.72. В противном случае он должен быть защищен, как указано в Разделе 725.23. Из этого правила есть два исключения.
Существуют также требования к трансформатору цепи управления и дополнительные требования к защите проводников.
|
430,73 |
Механическая защита проводника |
|
430,74 |
Отключение |
Цепи управления двигателем должны иметь средства отключения.Одно устройство может отключать как двигатель, так и цепи управления от питания, либо можно использовать отдельные. Если трансформатор используется для понижения напряжения в цепи управления и расположен в корпусе контроллера, средства отключения должны находиться на стороне питания трансформатора. Есть ряд исключений.
VII. Контроллеры двигателей
Цель этой части — потребовать подходящие контроллеры для всех двигателей. Когда двигатель находится в неподвижном состоянии и его мощность не превышает 1/8 л.с., можно использовать защитное устройство параллельной цепи, если двигатель обычно остается работающим и не может быть поврежден из-за того, что он не запускается или из-за перегрузок.Вилка и розетка могут быть контроллером, если мотор переносной и мощностью не более 1/3 л.с.
|
430,82 |
Конструкция контроллера |
|
430,83 |
Рейтинги |
Как правило, он должен иметь номинальную мощность, по крайней мере, равную мощности двигателя.Есть ряд дополнительных правил.
|
430,84 |
Не вскрывать все проводники |
Если он не служит отключающим устройством, он не должен размыкать все проводники.
|
430,85 |
В заземленных проводниках |
Это разрешено, если одновременно отключаются все остальные проводники.
|
430,87 |
Количество двигателей, обслуживаемых каждым контроллером |
Каждый двигатель обычно должен иметь собственный контроллер. Есть исключения из этого правила, если двигатели рассчитаны на напряжение не более 600 В, а отдельный контроллер рассчитан не менее чем на сумму всех двигателей, которые он будет контролировать. В этих условиях допускается, если в одном устройстве используется более одного двигателя или одно устройство максимального тока используется для группы двигателей [Раздел 430.53 (A)] или двигатели находятся в одной комнате в поле зрения контроллера.
|
430,88 |
Двигатели с регулируемой частотой вращения |
|
430,89 |
Ограничение скорости |
|
430,90 |
Комбинированный держатель предохранителя и переключатель в качестве контроллера |
|
430.91 |
Тип корпуса контроллера двигателя |
VIII. Центры управления двигателями
Центр управления двигателями — это совокупность закрытых секций, которые в основном содержат блоки управления двигателями и имеют общую шину питания.
|
430,94 |
Максимальная токовая защита |
Они должны иметь максимальную токовую защиту, либо устройство максимального тока на входе, либо главное устройство в центре управления двигателем.Он должен соответствовать частям A, B и I статьи 240 и иметь размер в соответствии с общей шиной питания.
|
430,95 |
Служебно-входное оборудование |
|
430,96 |
Заземление |
Все секции должны быть соединены заземляющим проводом оборудования или заземляющей шиной в соответствии с Таблицей 250.95. Здесь должны заканчиваться все заземляющие провода оборудования. В случае одиночной секции необходимо предусмотреть точку заземления.
|
430,97 |
Шины и проводники |
(A) Поддержка и организация. Их необходимо беречь от повреждений и крепко держать. В секции допускаются только проводники, подключенные или используемые для управления.
(B) Расположение фаз. Трехфазные шины расположены A, B, C, слева направо, сверху вниз или спереди назад, когда вы стоите впереди.
(C) Минимальное пространство для изгиба проволоки. Как указано в статье 373.
(D) Расстояния. Как указано в таблице 430.97.
(E) Барьеры. Используется в центрах управления двигателями служебного входа.
IX. Средства отключения
|
430.101 |
Общий |
|
430.102 |
Расположение |
Он должен быть предусмотрен и находиться в зоне видимости с места расположения контроллера. Исключение составляет электродвигатель с напряжением более 600 В, если он может быть заблокирован и установлен предупреждающий знак. Также один разъединитель можно использовать для группы контроллеров многомоторного устройства. Средство отключения также должно быть расположено в пределах видимости двигателя, за исключением случаев, предусмотренных Разделом 430.102 (a). Есть несколько дополнительных исключений.
|
430.103 |
Эксплуатация |
|
430.104 |
будет обозначать |
|
430.105 |
Заземленные проводники |
Если все проводники размыкаются одновременно, один полюс может находиться в заземленном проводе.
|
430.107 |
Легко доступный |
|
430.108 |
Каждое средство отключения |
|
430.109 |
Тип |
Отключающее устройство должно быть указано в (A) ниже, если оно не разрешено в пунктах (B) — (G) и соответствует указанным условиям.
(A) Общие. Это должен быть выключатель цепи двигателя с номинальной мощностью. Это также может быть автоматический выключатель в литом корпусе, переключатель в литом корпусе, автоматический выключатель с мгновенным срабатыванием, который является частью комбинированного контроллера двигателя, комбинированный контроллер с самозащитой или ручной контроллер двигателя, если он отмечен как таковой, если он устанавливается между двигателем и конечной ответвленной цепью двигателя и устройством защиты от замыканий на землю, все перечисленные позиции. К ручному контроллеру мотора предъявляются дополнительные требования.Системное изолирующее оборудование должно быть указано для целей отключения и должно быть установлено на стороне нагрузки устройства максимальной токовой защиты и средств отключения. Средство отключения должно быть одним из средств, указанных в пунктах 430.109 (A) (1) — (A) (3).
(B) Стационарные двигатели мощностью 1/8 лошадиных сил или менее. Можно использовать устройство максимального тока параллельной цепи.
(C) Стационарные двигатели мощностью 2 или менее лошадиных сил. Стационарные двигатели мощностью 2 л.с. или менее и 300 В или менее могут иметь выключатель общего назначения, рассчитанный на удвоение мощности двигателя.В цепях переменного тока можно использовать переключатель общего назначения, предназначенный только для переменного тока, если мощность двигателя не превышает 80% от номинала переключателя. Перечисленный ручной контроллер двигателя также может использоваться, если он отмечен как подходящий для отключения двигателя и его мощность в лошадиных силах не ниже номинальной мощности двигателя.
(D) Двигатели с автотрансформаторным управлением. Двигатели мощностью от 2 до 100 л.с. могут использовать выключатель общего назначения для двигателей с автотрансформаторными контроллерами, если двигатель приводит в действие генератор с защитой от перегрузки; контроллер может отключать ток заблокированного ротора, не имеет расцепителя напряжения и имеет защиту от перегрузки не более 125% от тока полной нагрузки; Предусмотрены отдельные выключатели с предохранителями или автоматические выключатели с обратнозависимой выдержкой времени и номиналом не более 150% от тока полной нагрузки.
(E) Разделительные выключатели. Стационарные двигатели мощностью более 40 л.с. постоянного тока или 100 л.с. переменного тока могут иметь общий выключатель или разъединительный выключатель, если отмечен «Не работать под нагрузкой».
(F) Двигатели с кабельным и разъемным подключением. Можно использовать штепсельную вилку и розетку с номинальной мощностью не ниже номинала двигателя. Это не требуется для электроприборов со шнуром и вилкой (Раздел 422.32), комнатных кондиционеров (Раздел 440.63) или переносного двигателя мощностью 1/3 л.с. или менее.
(G) Моментные двигатели.Для моментного двигателя можно использовать выключатель общего назначения.
|
430.110 |
Номинальный ток и отключающая способность |
(A) Средства отключения должны иметь номинал не менее 115% от номинального тока полной нагрузки двигателя. Есть исключение.
(B) Он должен иметь номинальное значение не менее 115% тока, указанного на паспортной табличке, для моментных двигателей.
(C) Для комбинированных нагрузок двигателей или двигателей и других типов нагрузок номинальные характеристики разъединителя не должны быть менее 115% от общего тока полной нагрузки всех нагрузок. В Кодексе содержится ссылка на метод определения комбинированной нагрузки.
|
430.111 |
Выключатель или автоматический выключатель в качестве контроллера и средства отключения |
Выключатель или автоматический выключатель можно использовать в качестве разъединителя и контроллера, если он соответствует требованиям Раздела 430.83: если он размыкает все незаземленные проводники к двигателю, имеет устройство защиты от перегрузки по току, которое размыкает все незаземленные проводники, идущие к переключателю, и является либо переключателем воздушного прерывания, либо автоматическим выключателем с обратнозависимой выдержкой времени, либо масляным выключателем.
|
430.112 |
Двигатели, обслуживаемые одним отключающим устройством |
Обычно двигатель должен иметь собственные средства отключения.Есть исключение.
|
430.113 |
Энергия из более чем одного источника |
Обычно каждый источник должен иметь отключение. Есть два исключения.
X. Системы привода с регулируемой скоростью
|
430.120 |
Общий |
|
430.122 |
Проводники Минимальный размер и допустимая нагрузка |
|
430.124 |
Защита от перегрузки |
|
430,126 |
Защита двигателя от перегрева |
|
430.128 |
Средства отключения |
XI.Свыше 600 Вольт, номинал
|
430,221 |
Общий |
|
430,222 |
Маркировка контроллеров |
|
430,223 |
Корпуса проводов, примыкающие к двигателям |
|
430.224 |
Размер проводов |
|
430,225 |
Максимальная токовая защита цепи двигателя |
|
430.226 |
Рейтинг аппаратуры управления двигателем |
|
430,227 |
Средства отключения |
XII.Защита токоведущих частей Все напряжения
|
430,231 |
Общий |
|
430,232 |
Где требуется |
При работе от 50 В или более открытые токоведущие части должны быть защищены от случайного контакта корпусом или другим местом. Это можно сделать в специальном помещении или вольере, на балконе или путем установки не менее 2-х.5 м (8 футов) над полом. Есть исключение.
|
430,233 |
Охрана обслуживающего персонала |
Если ограждения находятся в определенном месте, как указано в Разделе 430.132, то требуются изолирующие маты или платформы.
XIII. Заземление Все напряжения
|
430.241 |
Общий |
|
430.242 |
Стационарные двигатели |
Рамы должны быть заземлены, если они находятся во влажном месте и не изолированы, питаются по проводам в металлическом корпусе, в опасной зоне или если двигатель работает при напряжении более 150 В на землю.
|
430,243 |
Переносные двигатели |
|
430.244 |
Контроллеры |
|
430.245 |
Метод заземления |
XIV. Столы
Двигатели, схемы двигателей и контроллеры
Двигатели, схемы двигателей и контроллеры
Биджан Гайур, П.E.
Краткое содержание курса
Этот 6-часовой курс предназначен для изучения проектирования и применения двигателей, контроллеров двигателей и центров управления двигателями для различных проектов. Курс содержит необходимые правила, минимальные основные юридические требования и руководство по проектированию и установке двигателей, фидеров двигателей, защиты от короткого замыкания фидера двигателя и замыкания на землю, средств отключения двигателя, проводов цепи двигателя, контроллера двигателя, управления двигателем. цепи, защита двигателя от перегрузки и тепловая защита двигателя.
Также рассматриваются специальные применения, такие как приводы с регулируемой скоростью, многоскоростные двигатели, двигатели с частичной обмоткой, вторичные контроллеры и вторичные резисторы.
Материалы курса полностью основаны на статье 430 национального электрического кодекса NFPA 70. Студенту необходимо получить копию NFPA 70, редакция 2008 года.Этот курс включает тест с несколькими вариантами ответов в конце, который предназначен для улучшения понимания конечно материалы.
Учебная цель
Цель этого курса — познакомить слушателя с правилами и требованиями кодекса для применения и защиты двигателей, контроллеров двигателей и центров управления двигателями в промышленных, коммерческих, государственных и коммунальных проектах.
По завершении курса студент ознакомится с:
- Сфера действия статьи 430 NFPA 70;
- Определение терминов, используемых в статье 430 NFPA 70;
- Определение емкости и номинальной мощности двигателя;
- Маркировка двигателей и многомоторного оборудования;
- Маркировка на контроллерах;
- Требования к монтажному пространству в корпусах;
- Расположение двигателей;
- Жилы цепи двигателя;
- Коэффициент подачи и спроса;
- Защита двигателя и параллельной цепи от перегрузки;
- Защита от короткого замыкания и замыкания на землю в параллельной цепи двигателя;
- Защита фидера двигателя от короткого замыкания и замыкания на землю;
- Контроллеры двигателей;
- Центры управления двигателями;
- Средства отключения;
- Регулируемые приводные системы;
- Двигатели с номинальным напряжением более 600 вольт; и
- Заземление двигателей для всех напряжений.
Предполагаемый Аудитория
Этот курс предназначен для профессиональных инженеров-электриков, проектировщиков-электриков, инженеров-проектировщиков и обслуживающего персонала, занимающегося применением, спецификациями, проектированием, установкой, обслуживанием и техническим обслуживанием асинхронных двигателей и связанных контроллеров или центров управления.
Пособие участникам
Этот курс поможет частным лицам и организациям в применении двигателей, контроллеров двигателей и центров управления двигателями для различных проектов.Путем объяснения правил и использования таблиц участники смогут спроектировать и определить двигатели и центры управления двигателями в соответствии с Национальным электротехническим кодексом NFPA 70.
Курс Введение
Этот 6-часовой курс охватывает юридические требования к применению асинхронных двигателей в промышленных, коммерческих и коммунальных установках. Такие темы, как размер проводов, подающих питание на двигатели, значения на паспортных табличках, объяснение маркировки на двигателях и многомоторном оборудовании, кодовые буквы с заблокированным ротором, требования к пространству для проводки в корпусах, клеммный корпус двигателя, заземляющие соединения оборудования и вводы двигателя будут обсуждаться.Также будут обсуждаться другие представляющие интерес темы, такие как расположение двигателей, обслуживание рабочего цикла, многомоторное и комбинированное нагрузочное оборудование, коэффициент нагрузки фидера, перегрузка двигателя, защита от короткого замыкания и замыкания на землю.
Курс Содержимое
Материалы курса полностью основаны на статье 430 национального электрического кодекса NFPA 70. Студенту необходимо получить копию NFPA 70, редакция 2008 года. Копию NFPA 70 можно приобрести на следующих веб-сайтах:
http: // www.nfpa.com/
http://www.global.ihs.com/
ДВИГАТЕЛИ, ДВИГАТЕЛЬНЫЕ ЦЕПИ И КОНТРОЛЛЕРЫ
NFPA 70, статья 430, содержание
- Общие
- Проводники цепи двигателя
- Защита двигателя и параллельной цепи от перегрузки
- Защита от короткого замыкания и замыкания на землю в ответвленной цепи двигателя
- Защита от короткого замыкания и замыкания на землю фидера двигателя
- Цепи управления двигателем
- Контроллеры двигателей
- Центры управления двигателями
- Средства отключения
- Системы привода с регулируемой скоростью
- Более 600 Вольт, номинальное значение
- Защита токоведущих частей — все напряжения
- Заземление — все напряжения
- Таблицы
Краткое содержание курса
Этот курс предназначен для изучения разработки и применения двигателей, контроллеров двигателей и центров управления двигателями для различных проектов.Курс содержит необходимые правила, минимальные основные юридические требования и руководство по проектированию и установке двигателей, фидеров двигателей, защиты от короткого замыкания фидера двигателя и замыкания на землю, средств отключения двигателя, проводов цепи двигателя, контроллера двигателя, управления двигателем. цепи, защита двигателя от перегрузки и тепловая защита двигателя.
Викторина
Однажды вы закончили изучать выше содержания курса, тебе надо пройдите тест, чтобы получить кредиты PDH .
ОТКАЗ ОТ ОТВЕТСТВЕННОСТИ: Материалы содержащиеся в онлайн-курсе не являются заявлением или гарантией со стороны Центра PDH или любого другого лица / организации, упомянутых здесь. Материалы предназначены только для общей информации. Они не заменяют грамотного специалиста. совет. Применение этой информации к конкретному проекту должно быть пересмотрено. зарегистрированным архитектором и / или профессиональным инженером / геодезистом. Кто-нибудь делает использование информации, изложенной в настоящем документе, делает это на свой страх и риск и предполагает любую вытекающую из этого ответственность.
Понимание двигателей, цепей двигателей и контроллеров
В этом веб-семинаре обсуждаются требования NEC применительно к электродвигателям.
Электродвигатели являются неотъемлемой частью любого вращающегося оборудования как коммерческого, так и промышленного применения. От систем отопления, вентиляции и кондиционирования воздуха до конвейерных лент, лифтов, насосов, машинных прессов, роботов и практически любого ротационного оборудования, которое вы только можете придумать.
Первое, что приходит в голову, — это первичный двигатель, приводящий в действие оборудование; который в большинстве случаев является электродвигателем.Размер, форм-факторы, напряжение, ток, мощность в лошадиных силах, выходная эффективность и контроллеры зависят от типа двигателя, используемого в конкретных приложениях. Неизменное использование этих двигателей в различных коммерческих и промышленных приложениях в сочетании с высокими требованиями к времени безотказной работы и производственным давлением, что создает более высокий риск для персонала, обслуживающего их обслуживание.
Национальный электротехнический кодекс (NEC)NFPA 70 — это обязательный стандарт уполномоченных властей (AHJ), который определяет особые требования к двигателям в статье 430.В этом разделе определены общие требования к двигателям, сечениям проводов, силе тока, требованиям к защите и ряд других соображений. На этом вебинаре будут обсуждаться требования NEC применительно к электродвигателям.
Цели обучения:
- Чтобы получить полное представление о статье 430 Национального электротехнического кодекса (NEC).
- Чтобы знать, когда использовать усилители с паспортной таблички или настольные усилители при расчете цепей двигателей и их компонентов.
- Узнайте, как определить минимальную допустимую нагрузку для параллельной цепи двигателя и проводов фидера.
- Узнайте разницу между защитой двигателя от перегрузки, короткого замыкания двигателя и защитой от замыкания на землю.
Докладчик: Чарльз Р. Миллер и Бхану Срилла, директор по техническому маркетингу. Чарльз Миллер — электрик, владелец бизнеса, писатель, педагог и ведущий ток-шоу.
Контроллер мотора — обзор
Комментарии к Control
Полное изучение контроллеров мотора выходит за рамки этого текста.Я был бы упущен, если бы не упомянул, насколько важно для электрика разбираться в этой части схемы двигателя. Без хороших практических навыков работы по контролю электрик будет плохо подготовлен к работе с двигателями. Это важная тема, которая требует дальнейшего изучения электриком, который хочет оставаться в курсе событий отрасли.
Постоянный рост сложности схем управления двигателями происходит почти ежедневно. Не так давно числовое управление было провозглашено окончательным средством управления двигателем.Сейчас мы наблюдаем рост использования твердотельных устройств, которые используют цифровую логику в этих механизмах управления. Сначала для этих целей были введены дискретные компоненты, такие как транзисторы. Эти отдельные компоненты стремительно уступают место интегральным схемам. Интегральная схема может иметь сотни транзисторов с соответствующими схемными компонентами, которые будут использоваться в качестве переключателей. Тем не менее, все эти части содержатся в чипе размером не больше миниатюры.
В середине 1950-х, когда я учился в Университете Иллинойса, мне посчастливилось услышать Норберта Винера, отца кибернетики.Доктор Винер, умерший в 1964 году, был математиком и логиком. Он сыграл важную роль в разработке высокоскоростного компьютера. Он получил степень бакалавра в Университете Тафтса в возрасте 14 лет. Он получил свою первую докторскую степень в Гарвардском университете в возрасте 18 лет.
Доктор Винер выполнил университетские требования для получения докторской степени в нескольких областях. Я не помню точно области или количество, но я считаю, что они включали работы в областях математики, электротехники, химии, физики и медицины.
Доктор Винер ввел термин «кибернетика» и использовал его в качестве названия одной из своих книг, опубликованных в 1948 году. Кибернетика — это отрасль науки, которая объединяет области изучения коммуникаций и механики устройств, которые выполнять работу.
Основная часть исследований доктора Винера заключалась в получении обратной связи от нагрузки до контроллера для улучшения настроек механизмов. Он предложил совместное изучение коммуникаций и управления в рамках дисциплины кибернетика.
Как правило, работники двух полей мало знали о другом или не знали его вовсе. Конечной целью было объединение полностью автоматического завода с компьютером. Робототехника, используемая в производстве, является результатом исследования доктора Винера.
В компьютерах 1940-х и в начале и середине 50-х годов в основном использовались электронные лампы. (Транзистор был изобретен в 1947 году.) Они были большими, громоздкими и потребляли значительную электрическую мощность. Темой доктора Винера в тот день, когда я услышал его выступление, был биологический компьютер.Д-р Винер отметил, что система внутреннего контроля и связи внутри человека была похожа на то, что мы очень примитивно пытаемся использовать с машинами. Например, большинство людей могут поднять яйцо, не разбив его. Для машины, выполняющей ту же функцию, один и тот же процесс становится очень сложным.
Доктор Винер предположил, что если человеческий мозг может быть биологически живым после смерти человека, его можно будет использовать в качестве биологического компьютера, который мог бы хранить информацию, анализировать ее и посылать управляющие сигналы на механические устройства в произвести желаемые изменения.
Это то, что человек-оператор любой машины делает в повседневной жизни. Человеческий мозг, используемый в качестве блока управления компьютером, будет намного меньше и мощнее любого компьютера, существующего в то время или возможного в обозримом будущем.
После вступительного слова доктора Винера я должен признать, что очень мало понял из того, что он хотел сказать. Он пытался объяснить нам свою математическую систему вероятностей, которая могла предсказать выходной сигнал человеческого мозга, когда ему давали единственный входной импульс постоянного тока.В конце своей лекции доктор Винер спросил: «Джентльмены, знаете ли вы, какова вероятность предсказания работы человеческого мозга для одного простого ввода?» Далее он ответил на свой вопрос: «Господа, это 16 факториал (16 × 15 × 14… × 1) в 23 степени. Джентльмены, я полагаю, что такого чертова числа не существует.
Биологический компьютер может стать реальностью, а может и не стать. Но электронный компьютер стал реальностью, и его применение и распространение продолжают расти и во многих отношениях влияют на нашу повседневную жизнь.Скорость и эффективность компьютеров, а также их способность решать очень сложные задачи повышаются с каждым днем. В некоторых операциях компьютеры уже работают лучше, чем человеческий мозг. Они могут хранить гораздо больше информации и лучше извлекать эту информацию. Что еще более важно, их результаты предсказуемы.
Большой прорыв в компьютерных технологиях сегодня — это программы искусственного интеллекта, имитирующие человеческий мозг. Вы когда-нибудь играли в шашки или шахматы против компьютера?
Твердотельные программируемые контроллеры — хорошие примеры того, как промышленность сегодня использует кибернетику.Эти устройства представляют собой компьютеры, которые легко работают с двигателями, которые защищены или управляются несколькими пилотными устройствами. Эти устройства заменяют функции переключения ручного и магнитного управления твердотельными устройствами и включают в себя мощность компьютерной логики для обеспечения правильной работы двигателя в нужное время. По мере того, как сложность этих современных схем увеличивается, уровень знаний и понимания электрика также должен идти в ногу с тем, чтобы устанавливать, обслуживать, ремонтировать и заменять двигатели, используемые программаторами с компьютерным управлением.
430-Двигатели, схемы двигателей и контроллеры
Таблицы, таблицы с 430.247 по 430.251 (B) Часть XIV
Поставить
СТАТЬЯ 430
Двигатели, схемы двигателей и контроллеры
Часть II
430,24,
430,25 430,26
I. Общий
430.1 Объем. В этой статье рассматриваются двигатели, ответвления двигателя и питающие провода и их защита, защита двигателя от перегрузки, схемы управления двигателем, контроллеры двигателей и центры управления двигателями.
FPN № 1: Требования к установке для центров управления двигателями описаны в 110.26 (F). Оборудование для кондиционирования воздуха и холодильное оборудование рассматривается в статье 440.
FPN № 2: Рисунок 430.1 предназначен только для информации.
430.2 Определения.
Мотор питателя
Защита фидера двигателя от короткого замыкания и замыкания на землю
Средство отключения двигателя
Часть IX Часть V
Привод с регулируемой скоростью. Комбинация преобразователя мощности, двигателя и установленных на двигателе дополнительных устройств, таких как энкодеры, тахометры, термовыключатели и
Часть III Цепи управления двигателем Часть VI
Защита двигателя от перегрузки
извещателей, воздуходувок, обогревателей и датчиков вибрации.
Часть I
Система привода с регулируемой скоростью. Взаимосвязанная комбинация оборудования, обеспечивающая средства
Тепловая защита <м ч
Часть III
регулировка скорости механической нагрузки, связанной с
Вторичный резистор
мотор. Привод
Общие, 430.1 — 430.18, часть I, проводники цепи двигателя, 430.21 — 430.29, часть II, защита двигателя и параллельной цепи, защита от перегрузки, 430.31, часть III
Спо 430.44
Вторичный контроллер
Вторичные проводники
Рисунок 430.1 Статья 430 Содержание.
Часть II
430,23
Часть II 430.23 и
Статья 470
.Защита от короткого замыкания и замыкания на землю в ответвленной цепи двигателя, часть IV, с 430.51 по 430.58
Защита фидера двигателя от короткого замыкания и замыкания на землю, часть V
430,61–430,63
Цепи управления двигателем, с 430.71 по 430.74 Контроллеры двигателей, часть VI, с 430.81 по 430.90 Часть VII, Центры управления двигателями, с 430.92 по 430.98, часть VIII
Средства отключения, 430.101 — 430.113 Часть IX Системы приводов с регулируемой скоростью, 430.120 — 430.128 Часть X
Более 600 В, номинальное, с 430.221 по 430.227 Часть XI Защита токоведущих частей — все напряжения, 430.231 Часть XII
Спо 430.233
Заземление — все напряжения, с 430.241 по 430.245 Часть XIII
Системаобычно состоит из привода с регулируемой скоростью и вспомогательного электрического устройства.
Контроллер. В данной статье под контроллером понимается любой переключатель или устройство, которое обычно используется для запуска и остановки двигателя путем включения и отключения тока в цепи двигателя.
Цепь управления двигателем. Схема устройства или системы управления, которая передает электрические сигналы, управляющие работой контроллера, но не передает основной ток питания.
Изолирующее оборудование системыДистанционно контролируемая, дистанционно управляемая система изоляции контакторов, собранная для обеспечения функции отключения / изоляции, способная проверять работу из нескольких удаленных мест с помощью переключателей блокировки, каждый
с возможностью блокировки в положении «выключено» (открыто).
Двигатель привода клапана (VAM) в сборе. Произведенный узел, используемый для управления арматурой, состоящий из приводного двигателя и других компонентов, таких как контроллеры, моментные выключатели, концевые выключатели и защита от перегрузки.
FPN: VAM обычно имеют характеристики кратковременного режима и высокого крутящего момента.
430.4 Двигатели с частичной обмоткой. Асинхронный или синхронный двигатель с запуском по частям обмотки — это двигатель, который предназначен для запуска, сначала запитывая часть его первичной (якорной) обмотки, а затем запитывая двигатель
.(1) Табличные значения.За исключением двигателей, рассчитанных на низкие скорости (менее 1200 об / мин) или высоких крутящих моментов, а также для многоскоростных двигателей, контроллеры цепей двигателя
KT7 от Sprecher + Schuh
Управление и защита КТ7 до 45А
Утверждено UL для широкого спектра применений
Контроллеры цепей двигателей серии KT7 компанииSprecher + Schuh являются одними из самых универсальных и технологически продвинутых устройств управления, доступных сегодня. Эти устройства могут использоваться в различных схемах управления, которые уменьшают пространство на панели, упрощают установку и устраняют необходимость в более дорогом оборудовании.
Характеристики
- Токоограничивающая защита от короткого замыкания
- Защита от тепловой перегрузки, класс 10
- Переключение
- Сигнализация
Разнообразие моделей … Повышенные рейтинги …
Семейство контроллеровSprecher + Schuh KT7 предлагает более высокую отключающую способность (рейтинги KAIC), улучшенную координацию типа 2 и корпус среднего размера с номинальным током до 45 А. Кроме того, в линейку входят устройства с «высоким разрывом» 25A и 32A, которые обеспечивают более высокие показатели устойчивости при меньшем размере корпуса.
Для нескольких приложений
ПравилаUL позволяют использовать контроллеры цепей двигателей KT7 в широком спектре приложений, включая:
- Применение ручного стартера
- Традиционные групповые электродвигатели в соответствии с новыми номиналами проводников ответвлений
- Приложения отключения двигателя
- Применение ручного комбинированного пускателя с самозащитой (тип E)
- Применения индивидуального комбинированного стартера
- Применение комбинированного стартера с несколькими двигателями
Строительство Тип E Листинг
Улучшенные ограничения тока и отключающая способность позволили KT7 быть внесены в список UL / CSA как самозащищенные (конструкция типа E) ручные комбинированные контроллеры двигателей.Это устраняет необходимость в предохранителе или автоматическом выключателе на входе при использовании KT7 в качестве ручного пускателя двигателя. Кроме того, KT7 также соответствуют требованиям UL для «разъединителей на двигателе», что означает, что они могут использоваться в корпусе с блокируемой ручкой в качестве ручного пускателя двигателя для отдельных цепей, а также являются одобренным средством отключения двигателя. Для получения дополнительной информации прочтите «Методы применения контроллеров цепей двигателей KT7».
Тип E + комбинированный стартер + экономичный = «Ecombo» стартер
Когда комбинированный пускатель с самозащитой KT7 комбинируется с контактором CA7 компании Sprecher + Schuh для обеспечения дистанционного управления, у нас теперь есть альтернатива классическому комбинированному пускателю.Мы называем эти стартеры «Ecombo», которые экономят значительные средства и место на панели по сравнению с обычными комбо-стартерами. Пускатели Ecombo доступны для приложений мощностью до 30 л.с. (при 460/600 В).
Применение с несколькими двигателями … Популярное и экономичное
Поскольку KT7 имеет класс конструкции E-UL как самозащищенный комбинированный пускатель, многие групповые двигательные установки могут использовать еще более простую конструкцию и менее дорогое оборудование. Результатом является минимальный размер панели и максимальная гибкость, избегая при этом громоздких правил для двигателей группы NEC.Системы шинопровода диаметром 60 мм могут использоваться для обеспечения рентабельной и гибкой сборки панели с несколькими пускателями. За помощью в проектировании или технических разъяснениях по многомоторным или шинным системам обращайтесь в службу технической поддержки.
Отличные характеристики защиты от короткого замыкания
В случае короткого замыкания контакты размыкаются магнитными нерегулируемыми отключающими элементами за время, приближающееся к 3/1000 секунды. Это приводит к чрезвычайно быстрому нарастанию дугового напряжения, которое ограничивает ток короткого замыкания до очень низкого уровня.Благодаря этой превосходной способности к ограничению тока, контроллеры цепей двигателей KTA обладают способностью к короткому замыканию до 65 кА при 480 В и до 47 кА при 600 В.
Превосходная защита от тепловой перегрузки
Каждое устройство KT7 индивидуально калибруется на заводе для минимального и максимального тока, с которым оно может работать. В сочетании с автоматической компенсацией температуры окружающей среды в диапазоне от -25 ° C до + 60 ° C достигается очень точная защита от тепловой перегрузки. Кроме того, KT7 относится к классу 10.Он срабатывает в течение 10 секунд при заблокированном роторе (6 x FLA). Это лучше защищает современные двигатели с Т-образной рамой.
Специальные приспособления для специального применения
- Контроллеры
- KTC7 доступны с фиксированным магнитным расцепителем, установленным на 16 … 20x максимального значения диапазона регулировки тока (в отличие от 13x для KTA и KTB7). Это предотвращает ложное срабатывание, например, в приложениях, использующих высокоэффективные двигатели.
- Модель KTB7 доступна без функции теплового расцепителя, если требуется отдельная перегрузка двигателя.Комбинируйте KTB7 с контактором CA7 и реле перегрузки CEP7, чтобы создать трехкомпонентный пускатель Ecombo CLT7.
- Контроллеры с несколькими двигателями KTV7 подходят для применения на выходе установок частотно-регулируемого привода (VFD). Ознакомьтесь с нашей Белой книгой по использованию контроллеров KT7 с частотно-регулируемым приводом.
Прочие средства защиты
Все контроллеры цепей двигателя KT7 обеспечивают ускоренное отключение в однофазных условиях. Это достигается с помощью специального механизма «дифференциального отключения», встроенного в каждое устройство.
Международные стандарты и разрешения
Все контроллеры цепей двигателей Sprecher + Schuh KT7 внесены в списки UL и одобрены CSA. Они также имеют знак CE.
.