Что такое сервоусилитель и сервопривод. Какие бывают виды сервоусилителей. Для чего применяются сервоприводы в промышленности. Основные характеристики и принцип работы сервосистем. Отличия сервоусилителей от других типов приводов.
Что такое сервоусилитель и сервопривод
Сервоусилитель и сервопривод — это устройства, предназначенные для управления электродвигателями в системах с обратной связью. Основные функции этих устройств:
- Усиление управляющих сигналов для двигателя
- Обработка сигналов обратной связи от датчиков
- Реализация алгоритмов управления положением, скоростью и моментом двигателя
- Защита двигателя от перегрузок
Термины «сервоусилитель» и «сервопривод» часто используются как синонимы, хотя исторически между ними есть небольшие различия. Как правило, сервопривод — это более сложное устройство с расширенным функционалом по сравнению с сервоусилителем.
Основные виды сервоусилителей
Можно выделить следующие основные виды сервоусилителей:
По типу управляемого двигателя:
- Для синхронных двигателей
- Для асинхронных двигателей
- Для шаговых двигателей
- Для линейных двигателей
По типу управляющего сигнала:
- Аналоговые
- Цифровые
- Импульсные
По мощности:
- Маломощные (до 1 кВт)
- Средней мощности (1-10 кВт)
- Мощные (свыше 10 кВт)
Выбор конкретного типа сервоусилителя зависит от задач и требований конкретного применения.
Принцип работы сервопривода
Принцип работы сервопривода можно описать следующим образом:
- На вход сервопривода поступает управляющий сигнал, задающий требуемое положение, скорость или момент двигателя.
- Сервопривод усиливает этот сигнал и подает его на обмотки двигателя.
- Датчики обратной связи (энкодер, резольвер и др.) измеряют текущие параметры движения двигателя.
- Сервопривод сравнивает заданное и измеренное значение, вычисляет ошибку.
- На основе вычисленной ошибки формируется корректирующее воздействие на двигатель.
- Процесс повторяется с высокой частотой, обеспечивая точное следование заданной траектории движения.
Такой принцип работы позволяет добиться высокой точности и динамики управления двигателем.

Основные характеристики сервоусилителей
При выборе сервоусилителя важно учитывать следующие основные характеристики:
- Номинальный и пиковый ток
- Напряжение питания
- Поддерживаемые типы двигателей и датчиков
- Интерфейсы управления и связи
- Функции защиты и диагностики
- Габаритные размеры и способ монтажа
- Диапазон рабочих температур
Правильный подбор этих параметров обеспечит оптимальную работу сервопривода в конкретном применении.
Применение сервоприводов в промышленности
Сервоприводы широко используются в различных отраслях промышленности благодаря своим преимуществам:
- Высокая точность позиционирования
- Широкий диапазон регулирования скорости
- Высокая динамика
- Возможность реализации сложных алгоритмов движения
Основные области применения сервоприводов:
- Станки с ЧПУ
- Промышленные роботы
- Упаковочное оборудование
- Печатные машины
- Подъемно-транспортное оборудование
- Автоматические производственные линии
В этих применениях сервоприводы обеспечивают высокую производительность и качество выпускаемой продукции.
Отличия сервоусилителей от других типов приводов
Основные отличия сервоусилителей от других типов приводов:
- Наличие замкнутого контура управления с обратной связью
- Возможность точного управления положением, скоростью и моментом
- Высокая динамика и быстродействие
- Широкие возможности настройки параметров регулирования
- Расширенные функции защиты и диагностики
Эти особенности позволяют использовать сервоприводы в более сложных и ответственных применениях по сравнению с обычными частотными преобразователями или шаговыми приводами.
Ключевые производители сервоусилителей
На рынке сервоприводов представлено множество производителей, среди которых можно выделить следующих лидеров:
- Siemens
- ABB
- Schneider Electric
- Mitsubishi Electric
- Bosch Rexroth
- Yaskawa
- Fanuc
Эти компании предлагают широкий ассортимент сервоприводов для различных применений, а также комплексные решения для автоматизации производства.
Тенденции развития сервоприводов
Основные тенденции в развитии современных сервоприводов:

- Повышение энергоэффективности
- Уменьшение габаритов при сохранении мощности
- Расширение функциональных возможностей
- Интеграция с промышленными сетями и облачными платформами
- Упрощение процесса настройки и обслуживания
- Повышение надежности и срока службы
Эти тенденции направлены на повышение эффективности и удобства использования сервоприводов в современных системах автоматизации.
Сервоусилитель SV-DB100-1R5-4-1R | INVT
(495) 663-663-5
многоканальный для Москвы и МО
Заказать звонок
(800) 600-49-09
бесплатный для всех регионов РФ
График работы: Пн — Пт с 9:00 до 18:00
По запросу
| категория: | ПЛК, сенсорные панели и сервоприводы | Сервоприводы переменного тока SV |
| серия: | Сервоприводы переменного тока SV | |
| мощность: | 2,0 кВт | |
| напряжение: | 380 В |
* G/P — (G) — постоянный крутящий момент, (Р) — насосно-вентиляторная нагрузка
Гарантия на товар
В зависимости от номинальной мощности выпускается несколько типономиналов сервоусилителей.
Общая серия сервопривода имеет диапазон мощности от 0. 2KW ~ 5.5kW. Процессор dual-core (32-битный DSP + EPGA) и Встроенный цифровой пульт управления. Позволяет быстро сконфигурировать и оперативно вести мониторинг за работой сервопривода. алгоритм передового цифрового управления двигателем позволяет достичь многофункционального режима внутреннего позиционирования и способность запоминать мгновенное значение текущей координаты во время движения. Он имеет высокую надежность и успешно применяется в манипуляторах, упаковочных машинах, автоматических линиях и станках, которые требуют быстрого и высокоточного управления скоростью вращения и позиционирования.
2KW ~ 5.5kW. Процессор dual-core (32-битный DSP + EPGA) и Встроенный цифровой пульт управления. Позволяет быстро сконфигурировать и оперативно вести мониторинг за работой сервопривода. алгоритм передового цифрового управления двигателем позволяет достичь многофункционального режима внутреннего позиционирования и способность запоминать мгновенное значение текущей координаты во время движения. Он имеет высокую надежность и успешно применяется в манипуляторах, упаковочных машинах, автоматических линиях и станках, которые требуют быстрого и высокоточного управления скоростью вращения и позиционирования.
Применение:
Фасовочное и разливочное оборудование, загрузочные агрегаты, металлообрабатывающие станки, электроэрозионные станки, полиграфическое оборудование, вязальные машины, летучие и барабанные ножницы, упаковочное оборудование, текстильное оборудование, подача заготовок, контурная резка, электроэрозионные станки, отрезные станки, аттракционы, и т. д.
д.
Подробное описание
Сервопривод INVT — это комплектный привод переменного тока, состоящий из электронного блока управления (сервоусилителя) и сервомотора. INVT предназначен для прецизионного управления:
- скоростью вращения вала
- моментом, развиваемым двигателем на валу
- угловым положением вала
В зависимости от номинальной мощности выпускается несколько типономиналов сервоусилителей.
Общая серия сервопривода имеет диапазон мощности от 0.2KW ~ 5.5kW. Процессор dual-core (32-битный DSP + EPGA) и Встроенный цифровой пульт управления. Позволяет быстро сконфигурировать и оперативно вести мониторинг за работой сервопривода. алгоритм передового цифрового управления двигателем позволяет достичь многофункционального режима внутреннего позиционирования и способность запоминать мгновенное значение текущей координаты во время движения. Он имеет высокую надежность и успешно применяется в манипуляторах, упаковочных машинах, автоматических линиях и станках, которые требуют быстрого и высокоточного управления скоростью вращения и позиционирования.
Применение:
Фасовочное и разливочное оборудование, загрузочные агрегаты, металлообрабатывающие станки, электроэрозионные станки, полиграфическое оборудование, вязальные машины, летучие и барабанные ножницы, упаковочное оборудование, текстильное оборудование, подача заготовок, контурная резка, электроэрозионные станки, отрезные станки, аттракционы, и т.д.
Технические характеристики
— Широкий диапазон мощностей: 0.2кВт~5.5кВт
— Питание: AC 220V, 1-/3-фазное или AC 400V, 3-фазное
— Управление положением/скоростью/моментом
— Точность. Встроенный энкодер гарантирует стабильную работу на очень низких скоростях.
— Эффективное подавление вибрации.
— Процессор dual-core (32-битный DSP + EPGA)
— Встроенный цифровой пульт управления. Позволяет быстро сконфигурировать и оперативно вести мониторинг за работой сервопривода.
— Встроенный MODBUS. Cвязь с ПК или ПЛК по RS-232 или RS-485 интерфейсам для управления, конфигурирования и мониторинга привода.
Документация и ПО
ПО для ПК для настройки и контроля работы сервоприводов INVT
Руководство сервопривода DA200
Похожие предложения
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
| Ваш телефон: | |
Поля, отмеченные «*», обязательны для заполнения
| Ваш телефон: | |
Гарантийные обязательства:
1. Стандартный срок гарантии составляет 36 месяцев со дня выдачи Оборудования Покупателю.
2. В случае если в течение гарантийного срока вышеупомянутое Оборудование выйдет из строя не по вине Покупателя, поставщик обязуется произвести ремонт или замену дефектного Оборудования без дополнительной оплаты.
3. Гарантийный ремонт и обслуживание производятся в течение 5-ти рабочих дней после предъявления настоящего гарантийного талона, при наличии необходимых запчастей в сервисном центре Продавца Оборудования. Если Продавец не может произвести своевременный ремонт из-за отсутствия необходимых запчастей, то в течение 2-х рабочих дней после сдачи Оборудования Продавец обязан уведомить об этом Покупателя путем отправки ему электронного письма с указанием причины невозможности своевременного ремонта(замены) и указать сроки ремонта. Гарантийный срок продлевается на время проведения ремонта.
С более подробной информацией о гарантийных обязательствах Вы можете ознакомиться, пройдя по ссылке
ГлавнаяСервопривод Сервоусилители MR-ES |
Search. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Сервоусилители серии MR-E Super сочетают в себе уникальные функции с небольшими размерами. Они обеспечивают высокую точность позиционирования и малое время реакции в диапазоне мощности от 100 Вт до 2 кВт. В них встроены различные функции, например, регулирование положения и внутреннее регулирование частоты вращения, а также автонастройка в реальном масштабе времени, разработанная на Mitsubishi. Благодаря тому, что все внешние соединения выполнены на разъёмах и размещены с передней стороны сервоусилителя, систему можно более быстро и надёжно ввести в эксплуатацию. Параметрирущее программное обеспечение SETUP154E обеспечивает удобство при вводе в эксплуатацию и диагностике.
Документация: Технический каталог — Семейство MR Наверх |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 ..
.. 
Редукторы, мотор-редукторы: ООО «Приводные технологии»
+7 (495) 369- 04- 89
+7 (910) 726- 725- 4
+375 (17) 272- 04- 08
+375 (29) 61- 787- 61
info@tech-privod. com
com
Редукторы, мотор-редукторы, редукторные механизмы:
червячные редукторы, цилиндрические редукторы, конические редукторы,
планетарные редукторы. Бытовая и промышленная приводная техника:
мини редукторы, электродвигатели, двигатели постоянного тока, DC моторы,
шаговые двигатели, устройства плавного пуска, частотные преобразователи.
Вариаторы, мотор-барабаны, редукторы для смесителей, сервоприводы.
| о компании | |||||||||
|
Приводные Технологии — развивающаяся компания малого бизнеса, основным видом деятельности которой является производство, маркетинг и промоушинг, бытовой и промышленной, доступной и надежной приводной техники. Интеграция новейших технологий современного редукторостроения к отечественным условиям производства, — особенность наших технических решений, предлагаемых рынку. Современные запросы приводов стали более требовательны к механической передаточной части, к подводимому электрическому оборудованию, к последующим приводным муфтам и др. | |||||||||
|
| ||||||||
 Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее
Наши предложения редукторных мини-моторов, редукторных узлов и силовых передаточных машин предназначены для эксплуатации в разных отраслях, для достижения различных целей, с любым набором требований и т.д. Помимо всего этого, имеется широкий выбор электрических устройств для оперативного контроля и регулирования режимов работы привода, — так называемая, область приводной электроники. подробнее
 Представляем продукцию одного из … подробнее
Представляем продукцию одного из … подробнее .. 90 об/мин
.. 90 об/мин 5T
5T * Копирование информации с сайта запрещено законом об авторском праве.
© 2022 Приводные технологии
Российская Федерация
+7 (495) 369-04-89
+7 (910) 726-725-4 (МТС) Смоленск
Республика Беларусь
+375 17 272-04-08 (т/ф) Минск
+375 29 61-787-61 (Velcom) Минск
tech-privod.com
Сайт работает на платформе Nestorclub.com
Сервопривод или сервоусилитель? и другие вопросы по управлению движением
В чем разница между сервоприводом и сервоусилителем? Многие термины управления движением используются взаимозаменяемо, ситуативно, а иногда и неправильно. Мы будем первыми, кто признает, что временами это может немного сбивать с толку, и это понятно. Некоторые термины управления движением со временем изменились, и не во всех регионах. Лингвистические предпочтения также могут меняться в зависимости от отрасли приложения.
Мы будем первыми, кто признает, что временами это может немного сбивать с толку, и это понятно. Некоторые термины управления движением со временем изменились, и не во всех регионах. Лингвистические предпочтения также могут меняться в зависимости от отрасли приложения.
Мы надеемся, что этот блог прояснит некоторые неясности, связанные с терминологией управления движением приводов, контроллеров, двигателей и т. д. Опять же, некоторые термины могут означать разные вещи для разных людей, но это должно служить общим руководством к тому, что к чему.
Сервопривод или сервоусилитель?
Пожалуй, наиболее заметными из этих неоднозначных терминов являются сервоприводы и сервоусилители. По правде говоря, это как газировка, кола и шипучка; в большинстве случаев они означают одно и то же. Сервоусилитель, привод и даже драйвер могут использоваться более или менее взаимозаменяемо, по крайней мере, в Соединенных Штатах.
Давайте заглянем в историю управления движением. Термин сервоусилитель появился раньше, чем термин сервопривод. Это было в середине 1900-х, когда все они были аналоговыми. Сервоусилители лишь усиливали электрические командные сигналы и использовали обратную связь для управления крутящим моментом и скоростью однофазных двигателей. Только позже такие функции, как переключение режимов, несколько вариантов обратной связи, изоляция и другие функции, стали доступны сегодня на аналоговых платформах. Когда в конце 19 века появились цифровые сервоусилители00-х стало возможным еще больше функций, таких как управление положением, сетевая связь, цифровой ввод/вывод и предварительно запрограммированные перемещения. Имея больше возможностей, некоторые вместо этого стали называть сервоусилители сервоприводами.
Термин сервоусилитель появился раньше, чем термин сервопривод. Это было в середине 1900-х, когда все они были аналоговыми. Сервоусилители лишь усиливали электрические командные сигналы и использовали обратную связь для управления крутящим моментом и скоростью однофазных двигателей. Только позже такие функции, как переключение режимов, несколько вариантов обратной связи, изоляция и другие функции, стали доступны сегодня на аналоговых платформах. Когда в конце 19 века появились цифровые сервоусилители00-х стало возможным еще больше функций, таких как управление положением, сетевая связь, цифровой ввод/вывод и предварительно запрограммированные перемещения. Имея больше возможностей, некоторые вместо этого стали называть сервоусилители сервоприводами.
Таким образом, хотя сервопривод или сервопривод иногда подразумевает более сложное устройство, чем простой сервоусилитель, они представляют собой одну и ту же технологию и могут использоваться в США полностью взаимозаменяемо. Однако в некоторых частях Европы люди в некоторых отраслях промышленности будут говорить о приводе или драйвере в отношении самого двигателя, а не усилителя. В этом случае во избежание путаницы предпочтительнее использовать сервоусилитель (или даже контроллер). Однако в большинстве случаев вы можете назвать это сервоприводом, сервоусилителем или сервоприводом, и никто вас не огорчит.
В этом случае во избежание путаницы предпочтительнее использовать сервоусилитель (или даже контроллер). Однако в большинстве случаев вы можете назвать это сервоприводом, сервоусилителем или сервоприводом, и никто вас не огорчит.
Сервоприводы предназначены только для серводвигателей?
Как упоминалось ранее, возможности усилителей расширились за пределы основ управления серводвигателями и охватили другие области, особенно после появления цифровых приводов. Со временем инженеры пришли к выводу, что с помощью одной и той же технологии они могут управлять шаговыми, асинхронными и линейными двигателями. Возникает вопрос, следует ли приводы называться сервоприводами только в том случае, если они предназначены исключительно для однофазных и трехфазных серводвигателей? Мы говорим «нет» по двум основным причинам.
Во-первых, все технологии развились из сервоуправления, и иногда названия просто прилипают. В электронных письмах строка «Копия» означает «Копировальная копия», что происходит от старого метода создания нескольких копий письменных или машинописных документов с использованием копировальной бумаги. Хотя копировальная бумага, очевидно, не используется для электронных писем, этот термин все еще используется, потому что именно на нем он основан. Все началось с сервоприводов, поэтому мы продолжаем это.
Хотя копировальная бумага, очевидно, не используется для электронных писем, этот термин все еще используется, потому что именно на нем он основан. Все началось с сервоприводов, поэтому мы продолжаем это.
Во-вторых, многие приводы, используемые для управления шаговыми, асинхронными и линейными двигателями, также могут управлять сервоприводами. Просто потому, что кофейная кружка используется как подставка для карандашей, она остается кофейной кружкой. Наши смартфоны сегодня делают гораздо больше, чем просто звонят по телефону. Сервоприводы не просто ограничены своим первоначальным назначением.
Тем не менее, всегда будут исключения (и сторонники, которые строго следят за их соблюдением). Некоторая электроника специально разработана для другого типа двигателя, такого как шаговые приводы (или шаговые усилители, шаговые драйверы и т. д.), поэтому технически сервопривод в этом случае будет неправильным, но все же приемлемым для большинства. Другие могут возразить, что неправильно называть привод сервоприводом, если он работает с несерводвигателем. По этой причине такие термины, как моторный привод, моторный усилитель и моторный драйвер, могут использоваться как универсальный термин.
По этой причине такие термины, как моторный привод, моторный усилитель и моторный драйвер, могут использоваться как универсальный термин.
ADVANCED Motion Controls Цифровые сервоприводы из наших семейств приводов FlexPro™ и DigiFlex® Performance™ можно легко настроить для управления линейными двигателями, асинхронными двигателями переменного тока, двух- и трехфазными шаговыми двигателями, звуковыми катушками и многим другим! Мы называем их сервоприводами, и мы придерживаемся этого.
Являются ли сервоприводы контроллерами двигателей?
Это хитрый вопрос. Да, сервоприводы обеспечивают элемент управления двигателем. Без моторного привода вы бы потеряли управление. Но с точки зрения управления двигателем по желанию, являются ли они контроллерами? Иногда, но не всегда.
Давайте еще раз вернемся назад во времена первых сервоусилителей. Двигатели действительно работали от энергии, которую они получали от усилителя. И усилитель действительно обеспечивал тройную координацию фаз для бесколлекторных двигателей, что было критически важно для правильной работы двигателя. Однако в первую очередь усилители делали одно: усиливали. Они получали командный сигнал от внешнего источника, такого как циферблат, ползунковый переключатель или компьютер, и на его основе приводили в действие двигатель. Если вы хотели изменить крутящий момент, скорость или положение двигателя, вам нужно было изменить управляющий сигнал. Контроллер — это то, что доставило этот командный сигнал.
Однако в первую очередь усилители делали одно: усиливали. Они получали командный сигнал от внешнего источника, такого как циферблат, ползунковый переключатель или компьютер, и на его основе приводили в действие двигатель. Если вы хотели изменить крутящий момент, скорость или положение двигателя, вам нужно было изменить управляющий сигнал. Контроллер — это то, что доставило этот командный сигнал.
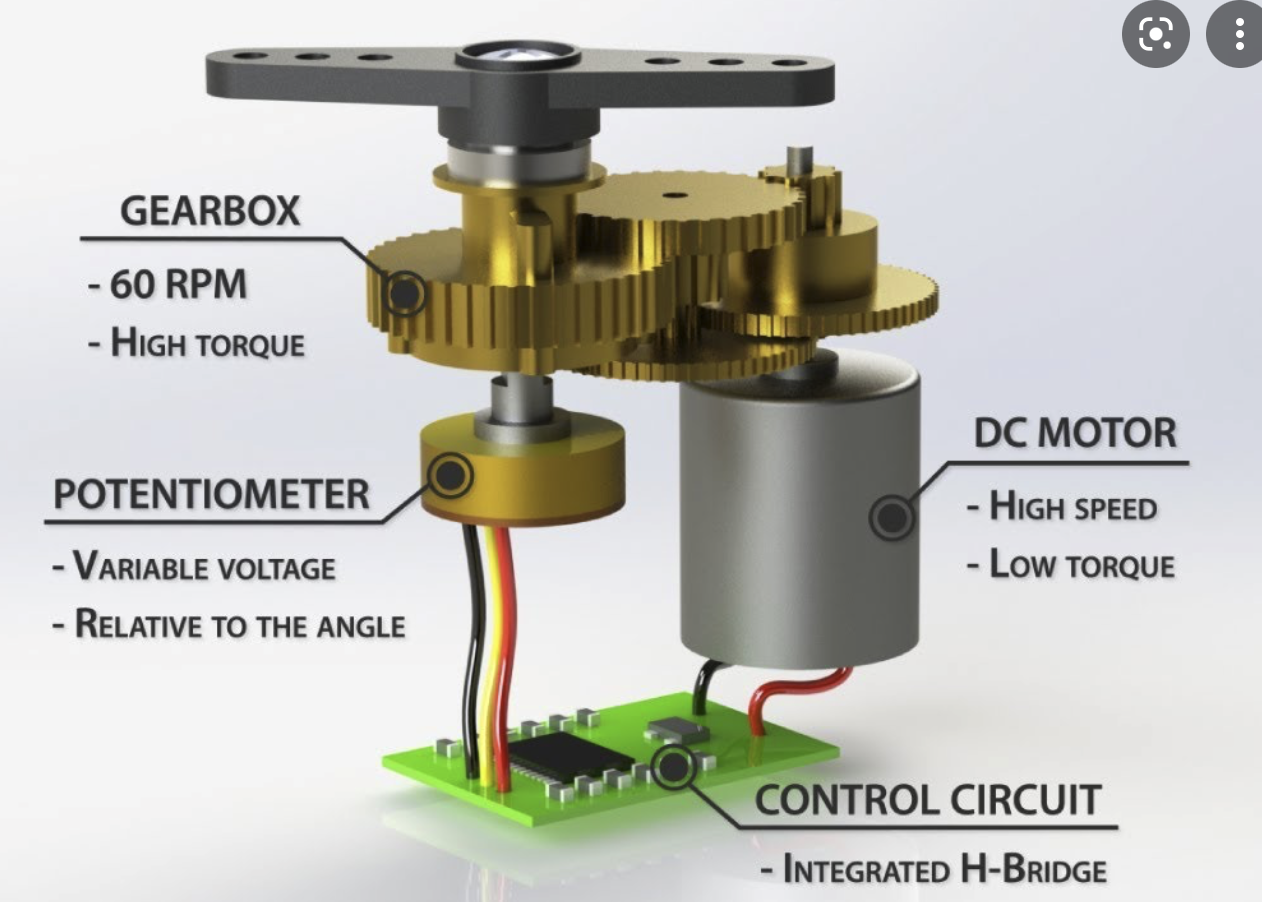
Теперь, когда сервоприводы стали более совершенными, грань между приводом и контроллером может быть немного размытой. В некоторые аналоговые приводы встроены потенциометры, поэтому, если кто-то будет управлять двигателем, вручную регулируя потенциометры усиления или смещения (как мы иногда делаем при проведении тестов в AMC), то привод будет технически действовать как контроллер. Тем не менее, эти процессы обычно выполняются во время процесса настройки, а не используются в качестве управляющего входа для фактического приложения.
Встроенная вычислительная мощность цифровых сервоприводов делает их еще более способными действовать как контроллеры. Цифровые приводы можно запрограммировать таким образом, чтобы они запускали выполнение стандартных команд движения сразу же после их включения. Благодаря логическим входам и выходам сервоприводы могут управлять собой и другими приводами в автономном режиме. Они даже могут управлять другими частями машины, в которой они установлены. Кроме того, наша платформа управления Click&Move® может быть встроена непосредственно в наши цифровые приводы, что позволяет им выполнять сложные операции независимо от любого внешнего контроллера.
Цифровые приводы можно запрограммировать таким образом, чтобы они запускали выполнение стандартных команд движения сразу же после их включения. Благодаря логическим входам и выходам сервоприводы могут управлять собой и другими приводами в автономном режиме. Они даже могут управлять другими частями машины, в которой они установлены. Кроме того, наша платформа управления Click&Move® может быть встроена непосредственно в наши цифровые приводы, что позволяет им выполнять сложные операции независимо от любого внешнего контроллера.
Говоря простым языком, очень легко сказать, что мы производим и продаем контроллеры двигателей в AMC. В конце концов, сервоприводы являются важнейшим компонентом управления движением, и во многих случаях привод может действовать как контроллер. Но, несмотря на некоторое совпадение, сервоприводы и контроллеры двигателей не являются абсолютными синонимами.
Заключительные мысли
Как мы уже говорили, терминология управления движением может различаться в зависимости от региона, отрасли и периода времени, но, надеюсь, этот блог развеет некоторые недоразумения.
Если вы все еще в чем-то не уверены, не стесняйтесь спрашивать нас! Мы знаем, что не все являются экспертами по управлению движением, и это нормально. Имея более чем тридцатилетний опыт работы в отрасли, мы будем рады поделиться своими знаниями. Вы также можете узнать больше о терминологии и технологиях управления движением в нашем Глоссарии, обзоре управления движением и на странице технологий!
Джексон Маккей, инженер по маркетингу
404 Ошибка — Страница не найдена
Запрошенная вами страница не найдена.
Головной офис
Pilz GmbH & Co. KG
Felix-Wankel-Straße 2
73760 Ostfildern
Германия
Телефон: +49 711 3409-0
Электронная почта: [email protected]
Америка
- США (бесплатно): +1 877-PILZUSA (745-9872)
- Бразилия: + 55 11 4942-7032
- Канада: +1 888-315-PILZ (315-7459)
- Мексика: +52 55 5572 1300
Европа
- Ирландия: +353 21 4804983
- Австрия: +43 1 7986263-444
- Бельгия: +32 9 321 75 70
- Дания: +45 74436332
- Германия: +49 711 3409444
- Франция (звонок бесплатный): +33 3 88104000
- Италия: +39 0362 1826711
- Россия: +7 495 6654993
- Турция: +90 216 5775552
- Швеция: +46 300 13990 / +45 74436332
- Великобритания: +44 1536 462203
- Швейцария: +41 62 889 79 32
- Португалия: +351 229 407 594
- Нидерланды: +31 347 320477
- Испания: +34 938497433
- Финляндия: +358 10 3224030 / +45 74436332
Азиатско-Тихоокеанский регион
- Таиланд: +66 210 54613
- Китай: +86 400-088-3566
- Сингапур: +65 6829 2920
- Новая Зеландия: +64 9 6345350
- Тайвань: +886 2 25700068
- Япония: +81 45 471 2281
- Южная Корея: +82 31 778 3390
- Австралия (бесплатно): +61 3 9560 0621 / 1300 723 334
Особенности Сервоусилители MELSERVO-JN Характеристики продукта Сервоприводы переменного тока-MELSERVO
Стремление к ПРОСТОМУ обслуживанию и поддержке
Без суеты! Быстрая настройка в одно касание
Просто включите функцию настройки в одно касание, чтобы автоматически выполнять различные регулировки, включая оценку отношения нагрузки к моменту инерции двигателя, регулировку усиления и подавление резонанса машины, что максимизирует производительность сервопривода. (Запатентовано)
(Запатентовано)
1-фазные 100 В переменного тока и 200 В переменного тока для питания главной цепи
1-фазные 200 В переменного тока и 1-фазные 100 В переменного тока сервоусилители доступны.
* Доступен сервоусилитель на 100 В переменного тока мощностью 200 Вт или меньше.
Простая электропроводка без отвертки
Простая настройка электронного редуктора
Расчет частоты командных импульсов и длины хода шарико-винтовой передачи прост, поскольку количество командных импульсов на оборот двигателя установлено равным 10000 по умолчанию. Кроме того, угол поворота легко регулируется за счет установки одного параметра.
Пример настройки
Когда количество командных импульсов на оборот установлено на 10000 (по умолчанию):
ШВП с шагом 10 мм перемещается на 1 мкм за импульс.
(10 мм на 10000 импульсов)
Когда количество командных импульсов на оборот установлено на 36000:
Серводвигатель вращается на 0,01 градуса за импульс.
(1 градус на 100 импульсов)
* Это когда редуктор не используется.
начало страницы
Обеспечение НАДЕЖНОСТИ на этапе проектирования продукта
Надежная работа с «функцией жесткого привода»
*1 ● Функция жесткого привода при перегрузке
Функция жесткого привода при перегрузке автоматически регулирует работу машины, чтобы предотвратить возникновение аварийного сигнала при обнаружении изменений нагрузки в машине, тем самым сокращая потери времени, вызванные остановками машины. (Запатентовано)
● Функция жесткого диска при мгновенном отключении питания
Когда обнаруживается мгновенный сбой питания, питание, заряженное в конденсаторе главной цепи, подается для поддержания работы системы.
* Аварийный сигнал низкого напряжения может возникать в зависимости от условий нагрузки.
● Функция виброустойчивого привода
Эта функция автоматически настраивает фильтр подавления резонанса машины и предотвращает резонанс, когда резонансная частота машины изменяется из-за искажений, вызванных старением.
*1 Функция Tough drive активируется установкой параметра.
Безопасное обслуживание благодаря раздельному источнику питания для основной цепи и цепи управления
Поскольку источник питания главной цепи (1-фазный 200 В переменного тока или 1-фазный 100 В переменного тока) и источник питания цепи управления (24 В постоянного тока) имеют соответствующие разъемы, питание основной цепи можно отключить отдельно. Это делает настройку параметров и выполнение обслуживания, например проверку состояния машины при возникновении ошибки, более безопасными.
С безвентиляторным корпусом
Эффективность технического обслуживания повышается за счет исключения охлаждающего вентилятора из сервоусилителя. Нет необходимости беспокоиться о сроке службы охлаждающего вентилятора.
«Функция записи привода» для быстрого устранения неполадок
● Эта функция автоматически записывает данные до и после возникновения тревоги.
Записанные данные доступны в виде графика даже после отключения питания.
Это позволяет определить причину неисправности и быстро решить проблему.
● Эта функция автоматически выбирает данные для записи на основе сигналов тревоги. Информация о причинах тревоги легко считывается и контролируется.
* MR Configurator2 необходим для отображения данных в регистраторе в виде графика.
наверх страницы
«Уменьшенное пространство для установки» делает ваш производственный цех более удобным
Высокая производительность при сохранении компактности! Даже высокоточное позиционирование может быть выполнено легко!
● Серводвигатель оснащен энкодером с высоким разрешением (131072 импульсов/об),
обеспечивая как высокоточное позиционирование, так и стабильность скорости на низкой скорости.
Сервоусилитель поддерживает частоту командных импульсов 1 Мп/с, обеспечивая высокоточное позиционирование. MELSERVO-JN можно использовать для различных целей.
● Сервоусилители серии MR-C можно легко заменить на MR-JN, поскольку оба этих сервоусилителя имеют одинаковые монтажные размеры.
Сервоусилители можно устанавливать вплотную друг к другу.
Сервоусилители MR-JN можно устанавливать вплотную друг к другу.
* Условия эксплуатации отличаются, если сервоусилители установлены близко друг к другу. Подробную информацию см. в разделах «Технические характеристики сервоусилителя» и «Меры предосторожности» в каталоге MELSERVO-JN.
Оснащен встроенным тормозным резистором
Сервоусилители мощностью 200 Вт и выше имеют встроенный тормозной резистор, что позволяет создавать системы меньшего размера.
начало страницы
Большой выбор серводвигателей
Компактный высокопроизводительный серводвигатель серии HF-KN
● Мощность: от 50 Вт до 400 Вт
● При установке инкрементного энкодера с высоким разрешением (131072имп/об) обеспечивается как «высокоточное позиционирование», так и «стабильность скорости на низкой скорости».
● Также доступны серводвигатели с электромагнитным тормозом.
● Кабели могут быть выведены либо в направлении, либо в противоположном направлении от вала двигателя в зависимости от выбранных кабелей.
● Серводвигатель серии HF-KN имеет класс защиты IP65 (за исключением части, проходящей через вал).
Серводвигатели с редуктором серии HG-KR также доступны.
● Мощность: от 50 до 400 Вт.
G1: для общепромышленных машин
G5: редуктор с фланцевым выходом для прецизионных применений
G7: редуктор с выходным валом для прецизионных применений
Эти серводвигатели монтируются на фланце.
● Также доступны серводвигатели с электромагнитным тормозом.
● Серия HG-KR с шестеренчатым редуктором соответствует классу защиты IP44 (за исключением части, проходящей через вал).
начало страницы
Оптимальная настройка сервопривода для машин
Расширенные функции настройки за счет автоматической настройки
● Усовершенствованное управление подавлением вибрации
Остаточная вибрация с низкой частотой (до 100 Гц) подавляется автоматически.
* Оптимальный фильтр устанавливается автоматически функцией автонастройки.
● Адаптивный фильтр II
Высокочастотный машинный резонанс можно автоматически подавить с помощью настройки в одно касание. Кроме того, с помощью функции жесткого привода вибрации фильтр автоматически перенастраивается при обнаружении резонанса машины даже после настройки.
Различные режимы управления
● Управление скоростью/крутящим моментом
Поддерживаются режим управления скоростью и режим управления крутящим моментом. (Команды скорости и крутящего момента задаются внутренними параметрами.)
● Ограничение крутящего момента
Крутящий момент, создаваемый серводвигателем, можно контролировать, устанавливая параметры.
Программное обеспечение для настройки «MR Configurator2»
MR Configurator2 обеспечивает высокоскоростную выборку и долговременное измерение формы сигнала.
Это упрощает запуск и настройку сервосистемы.
Персональный компьютер можно подключить к сервоусилителю через USB.
начало страницы
Встроенная функция позиционирования
Позиционирование без контроллера
Простая система позиционирования может быть сконфигурирована без контроллера, поскольку функция позиционирования (таблица точек и программные методы) встроена в сервоусилитель, экономя и стоимость и место.
Метод таблицы точек
Данные о положении (целевое положение), скорость серводвигателя и постоянные времени ускорения/замедления можно легко установить в таблице точек до семи точек. Операция позиционирования запускается сигналом внешнего интерфейса и выполняется в соответствии с указанными номерами таблицы точек
<Пример настройки таблицы точек>
<Пример работы>
Программный метод
Простые программы позиционирования могут быть созданы с помощью специальных команд.
