Как работают индуктивные датчики положения. Каковы их основные преимущества перед емкостными датчиками. Какие распространенные мифы существуют об индуктивных датчиках. Почему индуктивные датчики становятся все более популярными в промышленности и автомобилестроении.
Принцип работы индуктивных датчиков положения
Индуктивные датчики положения работают на основе принципа электромагнитной индукции, открытого Майклом Фарадеем в 1831 году. Их работа основана на взаимодействии магнитного поля катушки датчика и металлического объекта измерения.
Основные компоненты индуктивного датчика положения:
- Передающая катушка (Tx), создающая переменное магнитное поле
- Приемные катушки (Rx), в которых индуцируется ток под влиянием магнитного поля
- Металлический объект измерения, вызывающий возмущения магнитного поля
Как происходит измерение положения индуктивным датчиком?
- Передающая катушка создает переменное магнитное поле
- При приближении металлического объекта в нем возникают вихревые токи
- Вихревые токи создают собственное магнитное поле, которое искажает исходное
- Приемные катушки фиксируют это изменение магнитного поля
- По разнице сигналов в приемных катушках определяется положение объекта
Преимущества индуктивных датчиков перед емкостными
Индуктивные датчики имеют ряд важных преимуществ по сравнению с емкостными датчиками положения:

- Высокая устойчивость к загрязнениям, влаге и конденсату
- Нечувствительность к электростатическим помехам
- Высокая точность измерений при высоких температурах
- Простота установки и менее жесткие требования к допускам
- Возможность работы через неметаллические материалы
- Нечувствительность к внешним магнитным полям
Почему индуктивные датчики более устойчивы к внешним воздействиям? Это обусловлено физическими принципами их работы — измерением возмущений магнитного поля, а не изменения емкости как в емкостных датчиках.
Развенчание мифов об индуктивных датчиках
Вокруг индуктивных датчиков существует несколько распространенных заблуждений, которые нуждаются в прояснении:
Миф 1: Индуктивные датчики измеряют индуктивность
Это неверно. Индуктивные датчики измеряют возмущения магнитного поля, вызванные металлическим объектом. Они не измеряют непосредственно индуктивность.
Миф 2: Низкая точность измерений
На самом деле современные индуктивные датчики обеспечивают очень высокую точность — до ±0,1% во всем диапазоне измерений. При высоких температурах они превосходят по точности другие магнитные датчики.

Миф 3: Высокая стоимость
Индуктивные датчики часто оказываются более экономичным решением, чем датчики Холла или магниторезистивные датчики, так как не требуют дорогостоящих постоянных магнитов.
Применение индуктивных датчиков в промышленности и автомобилестроении
Индуктивные датчики положения находят все более широкое применение в различных отраслях:
- Автомобильная промышленность — измерение положения педалей, клапанов, роторов
- Робототехника — определение положения манипуляторов
- Станкостроение — контроль положения рабочих органов станков
- Авиационная и космическая техника — системы управления и навигации
- Нефтегазовая отрасль — контроль положения запорной арматуры
Почему индуктивные датчики становятся все более популярными? Основные причины:
- Высокая надежность и долговечность
- Устойчивость к жестким условиям эксплуатации
- Возможность работы при высоких температурах
- Нечувствительность к электромагнитным помехам
- Высокая точность и повторяемость измерений
Перспективы развития индуктивных датчиков положения
Технологии индуктивных датчиков продолжают активно развиваться. Основные направления совершенствования:
- Миниатюризация конструкции
- Повышение точности измерений
- Расширение диапазона рабочих температур
- Снижение энергопотребления
- Интеграция с цифровыми интерфейсами
Какие новые возможности открывает развитие индуктивных датчиков? Это позволит создавать более компактные, точные и надежные системы измерения положения для самых различных применений — от бытовой техники до космических аппаратов.
Сравнение индуктивных датчиков с другими типами датчиков положения
Как соотносятся характеристики индуктивных датчиков с другими типами датчиков положения? Рассмотрим сравнительную таблицу:
| Характеристика | Индуктивные | Емкостные | Магниторезистивные | Датчики Холла |
|---|---|---|---|---|
| Точность | Высокая | Средняя | Высокая | Средняя |
| Устойчивость к загрязнениям | Высокая | Низкая | Средняя | Средняя |
| Температурная стабильность | Высокая | Низкая | Средняя | Средняя |
| Энергопотребление | Среднее | Низкое | Низкое | Низкое |
| Стоимость | Средняя | Низкая | Высокая | Средняя |
Как видно из таблицы, индуктивные датчики обладают оптимальным сочетанием характеристик для многих применений, особенно в сложных условиях эксплуатации.

Ключевые факторы при выборе индуктивного датчика
На что следует обратить внимание при выборе индуктивного датчика положения для конкретного применения?
- Диапазон измерения — линейный или угловой, максимальное перемещение
- Точность и разрешающая способность измерений
- Условия эксплуатации — температура, влажность, вибрации
- Требования по быстродействию
- Конструктивные ограничения — габариты, способ монтажа
- Тип выходного сигнала — аналоговый или цифровой
- Совместимость с системой управления
Правильный выбор датчика позволит обеспечить надежную и точную работу системы измерения положения в течение длительного срока.
Сравнение индуктивных и ёмкостных датчиков положения | ИНЕЛСО
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством. И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Автор: Mark Howard, Zettlex UK Ltd
Введение
Некоторые индуктивные и ёмкостные датчики выглядят очень похоже и неудивительно что инженеры-разработчики бывают сбиты с толку их сходством. И те и другие являются бесконтактными датчиками положения и построены на основе печатных плат. Тем не менее, физические принципы, лежащие в основе каждого типа датчиков, достаточно различны. В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
В конечном итоге на практике это означает, что эти типы датчиков подходят для различных приложений. Эта статья объясняет физические принципы каждой технологии и сравнивает соответственно сильные и слабые стороны каждого подхода.
Принцип работы – Ёмкостные датчики
Когда исследователя Эвальда Юргена фон Клейста ударило электрическим током от лабораторного прибора в 1745 году, он внезапно понял, что есть возможность сохранять электрический заряд в больших количествах. Возможно, ненамеренно он построил первый в мире конденсатор. Конденсатор действует как накопитель электрической энергии и, как правило, состоит из двух проводящих пластин, разделённых непроводящим материалом (диэлектриком). В качестве диэлектрика обычно выступает воздух, пластик или керамика. Простая математическая модель конденсатора приведена на рис. 1.
Рис. 1 Простая модель конденсатора (С)
Диэлектрическая проницаемость ε включает в себя две составляющие — εr и ε0, где εr – это относительная магнитная проницаемость (иногда называемая диэлектрической постоянной) материала между пластинами и ε0 – электрическая постоянная (ε0 ≈ 8.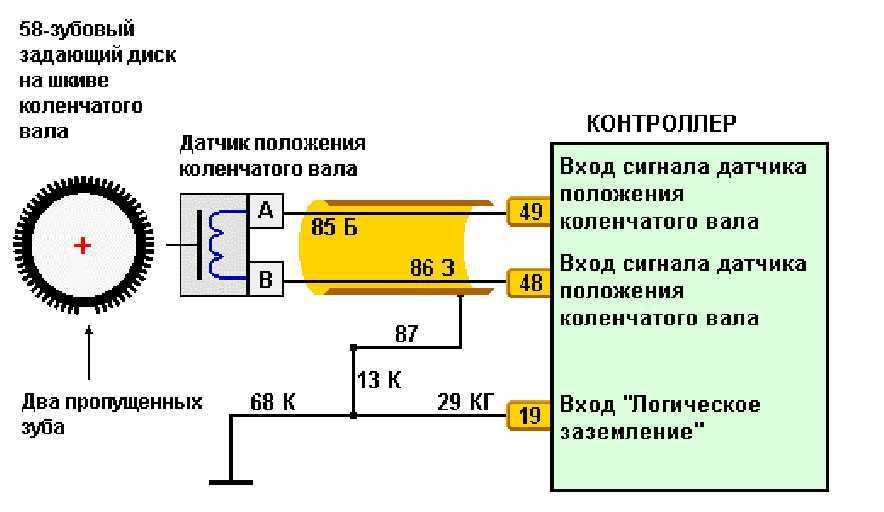 854×10−12 Ф/м).
854×10−12 Ф/м).
Многие датчики работают по ёмкостному принципу, в особенности тактильные датчики таких устройств, как планшеты и мобильные телефоны. Эти ёмкостные датчики определяют отсутствие или присутствие пальца человека и работают как альтернатива кнопочному переключателю. Присутствие пальца человека – или скорее воды в нём – приводит к изменению относительной диэлектрической проницаемости вызывающей в свою очередь изменение ёмкости.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения, который работает путём измерения изменений ёмкости происходящих из-за изменения размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость как при изменении расстояния между пластинами (d) так и при изменении площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Другой тип ёмкостного датчика – это ёмкостной датчик перемещения. Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Принцип его работы основан на измерении величины емкости, которая изменяется при изменении размеров конденсатора. Как можно видеть из математической формулы на рис. 1, ёмкость прямо пропорциональна как расстоянию между пластинами (d), так и площади перекрытия пластин (A). Перемещение может измеряться в осевом направлении (изменение d) или в плоскости пластин. Пластины конденсатора можно с успехом изготавливать с использованием печатных плат.
Для того чтобы хранить сколько-нибудь значительный заряд, расстояние между пластинами d должно быть существенно меньше площади пластин. Величина d обычно гораздо меньше 1 мм. По этой причине такая технология хорошо подходит для измерения нагрузки и тензометрических датчиков, поскольку может давать сравнительно большие изменения сигнала при маленьком измеряемом расстоянии. Похожим образом, ёмкостные линейные или вращающиеся датчики могут быть сконструированы таким образом, что перемещение вызывает изменение площади перекрытия пластин A.
К сожалению, кроме изменения размеров конденсатора, ёмкость также чувствительна и к другим факторам. Если пластины конденсатора окружены воздухом то диэлектрическая проницаемость будет изменяться из-за влияния температуры и влажности, поскольку диэлектрическая постоянная воды отличается от воздуха. Близко расположенный объект, который изменяет проницаемость окружающего пространства, тоже будет вызывать изменения ёмкости. В случае тактильного датчика, вода в пальцах вызывает местное изменение проницаемости и, соответственно, срабатывание датчика. Вот почему работа нереагирующего тактильного датчика может быть улучшена, если намочить конец пальца.
За исключением случаев, когда окружающая среда датчика может быть герметично замкнута или жёстко контролируема, ёмкостные датчики не подходят для применения в жёстких условиях окружающей среды, где есть возможность проникновения посторонних веществ или больших изменений температуры. Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
Неудивительно, что ёмкостные датчики мало подходят для применения в условиях, где высока вероятность образования конденсата при снижении температуры.
При неизменном физическом устройстве датчика, расстояние между пластинами датчика должно поддерживаться малым относительно размеров пластин конденсатора и выдерживаться в достаточно узком допуске. Это может накладывать очень высокие требования по механической точности установки датчика в конечное изделие и может быть непрактично и неэкономично, поскольку различие тепловых расширений, вибраций или механических допусков конечного изделия могут привести к изменению расстояния между пластинами и, таким образом, к искажению измерений.
Более того ёмкостный эффект основан на хранении электрического заряда на пластинах конденсатора. Если конечное изделие, куда устанавливается датчик, может создавать электростатическое поле в процессе своего перемещения – от трения, скольжения или вращения деталей – это может искажать показания датчика. В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
В экстремальных случаях датчик не будет работать совсем или, что хуже, электростатические возмущения будут приводить к правдоподобным, но неверным показаниям датчика. В некоторых случаях обязательно заземление компонентов конечного изделия для рассеивания заряда с пластин датчика. Часто это является необходимым в ёмкостных датчиках угла, поскольку вращение вала создаёт статический заряд из-за относительного перемещения подшипников, шестерён, шкивов и прочее.
Принцип работы – Индуктивные датчики
В 1831 Майкл Фарадей открыл, что протекание переменного тока по одному проводнику индуцирует протекание тока в противоположном направлении во втором проводнике. С тех пор магнитная индукция стала широко использоваться как физический принцип построения датчиков для измерения положения и скорости – резольверы (СКВТ), сельсины и дифференциальный трансформатор для измерения линейных перемещений. Основы теории можно объяснить, рассматривая две катушки: передающую катушку (Tx), по которой протекает переменный ток, и приёмную катушку (Rx), в которой индуцируется ток.
Рисунок 2. Закон индукции Фарадея
Величина напряжения на приёмной обмотке пропорциональна относительным площадям, геометрии и смещению двух катушек. Однако, как и с ёмкостной технологией, на поведение катушек могут влиять и другие факторы. Одним из таких факторов является температура, но её влияние может быть нивелировано путём использования нескольких приёмных катушек и вычислении положения по отношению полученных сигналов (как в дифференциальном трансформаторе). Соответственно, даже в случае изменений температуры, её влияние на результат компенсируется, поскольку отношение сигналов является неизменным для любого положения.
В отличие от ёмкостных способов измерения, индуктивная технология гораздо менее подвержена влиянию посторонних частиц, таких как вода или грязь. Поскольку катушки могут находиться на относительно большом расстоянии друг от друга, точность установки составляет гораздо меньше проблем, и основные компоненты индуктивного датчика могут быть установлены с относительно свободными допусками. Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Это не только помогает снизить стоимость датчика и конечного изделия, но также позволяет использовать компоненты с защитным покрытием или заливкой, что позволяет датчикам противостоять таким внешним воздействующим факторам, как длительное погружение, сильные удары, вибрация или наличие взрывоопасной газовой или пылевой среды.
Индуктивные датчики обеспечивают надёжный, стабильный и устойчивый к внешним воздействиям подход к измерению положения и, таким образом, является предпочтительным выбором в приложениях, где жёсткие условия окружающей среды являются нормой, например, в военной технике, авиакосмической промышленности, промышленных установках и системах для нефтегазового сектора.
Несмотря на надёжность и устойчивость к внешним воздействиям, традиционные индуктивные датчики имеют ряд отрицательных сторон, которые препятствуют их более широкому распространению. В их конструкции есть проводники, намотанные на катушки, которые должны быть намотаны достаточно точно, чтобы обеспечить необходимую точность измерений положения. Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Для того, чтобы обеспечить наличие достаточно сильного электрического сигнала, необходимы обмотки с большим количеством витков. Такая конструкция с намотанной катушкой делает традиционный индуктивный датчик громоздким, тяжёлым и дорогим.
Инженеры, рассматривающие возможность применения индуктивных датчиков положения, часто задают вопрос о сложностях, связанных с электромагнитными шумами. В данном случае такая озабоченность является неуместной, если принять во внимание, что эти датчики, как резольверы, успешно используются много лет в жёсткой электромагнитной установке в корпусах электродвигателей для коммутации и управления скоростью. Что касается температурной стабильности, то устойчивость к жёстким условиям может быть достигнута при использовании дифференциального подхода, так, что электромагнитная энергия, поступающая в различные части системы, эффективно компенсирует друг друга. Вот почему индуктивные датчики, такие как резольверы и дифференциальные линейные трансформаторы, являются предпочтительным выбором в ответственных применениях, например, в гражданской авиации в течение многих лет.
Другой подход к индуктивным датчикам
Другой подход к индуктивным датчикам использует тот же физический принцип, но в нём применяются плоские конструкции на основе печатных плат вместо намотанных катушек. Именно этот подход и применяется Zettlex. Это означает, что обмотки могут быть изготовлены путём травления меди или при помощи нанесения на самые различные материалы подложки: полиэстерную плёнку, бумагу, эпоксидный слоистый пластик и даже на керамику. Такие печатные конструкции можно изготовить более точно, чем намотанные катушки. Вследствие чего достигается более высокая точность измерения при меньших затратах, размерах и массе, сохраняя в то же время все положительные свойства индуктивной технологии.
Рисунок 3. Пример грязного, но полностью работоспособного индуктивного датчика с плоской печатной обмоткой.
Датчики серии IncOders компании Zettlex – это бесконтактные устройства для прецизионного измерения угла. Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Датчик IncOder состоит из двух частей: статор и ротор, каждая из которых имеет форму плоского кольца. Большое центральное отверстие позволяет легко пропускать валы, оптические волокна, трубы и кабели, размещать токосъёмники. Индуктивные угловые энкодеры серии IncOder не требуют точной механической установки, скорее можно сказать, что ротор и статор должны быть просто привинчены в конечное изделие. Угловые энкодеры Zettlex не восприимчивы к посторонним веществам, что делает их идеально подходящими к жёстким условиям окружающей среды, где ёмкостные устройства работают ненадёжно.
Заключение
Преимущества каждого из трёх подходов сведены вместе в таблице ниже. Можно сделать вывод, что из трёх приведённых подходов, нетрадиционный индуктивный подход, использующий печатные обмотки, обеспечивает наибольшее количество преимуществ.
|
Ёмкостные |
(Традиционные катушки) |
Индуктивные |
|
| Высокое разрешение |
✓ |
✓ |
✓ |
|
Высокая повторяемость |
✓ |
✓ |
✓ |
| Высокая точность |
✓ |
✓ |
✓ |
|
Устойчивость к грязи, воде или конденсату |
✓ |
✓ |
|
|
Устойчивость к электростатике |
✓ |
✓ |
|
|
Устойчивость к электромагнитным помехам |
✓ |
✓ |
✓ |
|
Низкий температурный дрейф |
✓ |
||
|
Простота установки |
? |
✓ |
|
|
Компактный |
✓ |
✓ |
|
|
Лёгкий |
✓ |
✓ |
|
|
Экономичный |
? |
✓ |
Рисунок 4. Таблица сравнительных преимуществ каждой технологии
Таблица сравнительных преимуществ каждой технологии
Мифы об индуктивных датчиках положения. Марк Смит, Microchip Technology
Индуктивные датчики положения измеряют индуктивность.
Индуктивные датчики не измеряют индуктивность. Работа этих устройств основана на взаимодействии магнитного поля катушки датчика и металла, который входит в состав объекта. Для точного определения возмущений в магнитном поле, вызванных этим объектом, используются хорошо известные свойства трансформатора с воздушным сердечником и закон Фарадея. Проще говоря, индуктивные датчики измеряют возмущение магнитного поля, обусловленное проводящим объектом (см. рис. 1).
Рис. 1. Образец индуктивного датчика положения
Магнитное поле генерируется не постоянным магнитом, который применяется в датчиках Холла и магниторезистивных датчиках, а первичной обмоткой трансформатора. Две вторичные обмотки используются для детектирования этого поля.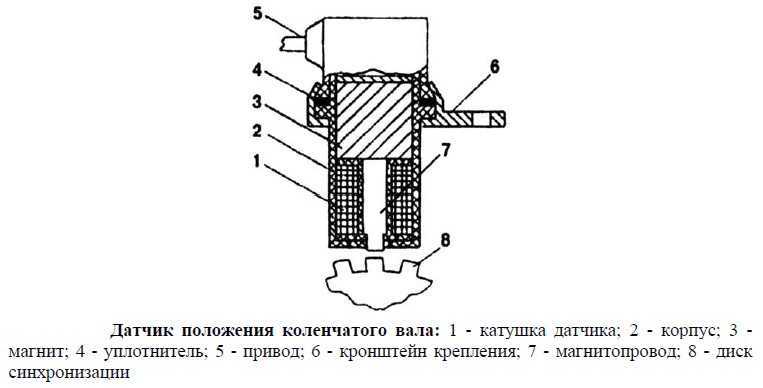 Металлический объект, помещенный в магнитное поле, индуцирует вихревые токи, которые противодействуют полю. На поверхности металлического объекта напряженность поля равна нулю. Разнесенные друг от друга приемные катушки определяют разные значения напряжения. Положение объекта рассчитывается путем сравнения этих двух напряжений.
Металлический объект, помещенный в магнитное поле, индуцирует вихревые токи, которые противодействуют полю. На поверхности металлического объекта напряженность поля равна нулю. Разнесенные друг от друга приемные катушки определяют разные значения напряжения. Положение объекта рассчитывается путем сравнения этих двух напряжений.
Точность определения положения с помощью индуктивных датчиков невысока.
Это в корне неверное утверждение, т.к. индуктивные датчики положения работают с очень высокой точностью и при высоких рабочих температурах превосходят другие магнитные датчики, применение которых в таких случаях затруднено. Показания индуктивных датчиков положения не зависят от нелинейных свойств постоянного магнита – они фиксируют только возмущение в генерируемом ими магнитном поле. Погрешность их измерения не превышает ±0,1% во всем диапазоне измерения при комнатной температуре. Погрешность не превышает ±0,3% при более высоких температурах и изменениях воздушного зазора между объектом и датчиком.
Кроме того, для устранения вариаций температуры или минимизации этого эффекта применяется полноценный алгоритм. Например, индуктивный датчик положения возбуждает магнитное поле на частоте 1–6 МГц, используя для этого LC-генератор. Оба параметра могут меняться в зависимости от температуры, но это не влияет на точность определения положения. Дело в том, что приемные каналы вторичной обмотки используют синхронную демодуляцию (см. рис. 2),
Рис. 2. Схема синхронного демодулятора
причем демодулятор управляется осциллятором первичной стороны. Этот дрейф не влияет на амплитуду принимаемых сигналов. В то же время металлические объекты, находящиеся рядом с датчиком, могут влиять на магнитное поле. В таких случаях требуется калибровка, которая, однако, не учитывает изменений температуры. Для устранения погрешностей вычислений и дискретизации применяются 13-бит АЦП и 32-бит процессоры, обеспечивающие 12-бит разрешение на выходе в измеряемом диапазоне.
У индуктивных датчиков положения – высокая цена.
Высокая эффективность индуктивных датчиков сочетается с разумной стоимостью. Если датчикам Холла и магниторезистивным датчикам требуется постоянный магнит для обеспечения достаточно хорошей точности, то индуктивным датчикам необходимо только, чтобы объект был металлическим, благодаря чему пользователь может сэкономить на цене магнита. И хотя площадь платы индуктивного датчика больше за счет его проводников, ее стоимость существенно ниже стоимости постоянного магнита. Таким образом, индуктивный датчик положения – более экономичное решение, чем приложения с датчиком Холла или магниторезистивным датчиком благодаря тому, что магнитное поле измеряется без помощи магнита.
Индуктивные датчики положения чувствительны к внешнему магнитному полю.
Современные автоматические устройства генерируют еще больше паразитных магнитных полей, чем прежде, которые вызывают проблемы с использованием датчиков Холла и магнитных датчиков. В индуктивных датчиках положения применяется активная демодуляция для борьбы с этими паразитными полями.
Величина потребляемого тока электромобилями следующего поколения достигает нескольких сотен ампер (см. рис. 3).
Рис. 3. При работе мотора и протекании большого тока генерируются паразитные магнитные поля высокой напряженности
Кроме того, большинство электромобилей оснащено более чем тремя бесщеточными электродвигателями постоянного тока (BLDC), электронными гидроусилителями руля и системами помощи при торможении. Все эти системы генерируют паразитное магнитное поле. Поскольку у него высокая скорость нарастания, ужесточаются требования к проведению испытаний на помехоустойчивость. В соответствии с действующими стандартами автомобильная электроника при прохождении испытаний на электромагнитную совместимость подвергается воздействию поля постоянного тока величиной 4 мТл, и потому ложные показания датчиков недопустимы.
Преимущество индуктивных датчиков положения в том, что они устойчивы к этим помехам благодаря активной фильтрации только той частоты, которая требуется для измерений. Поскольку в этих датчиках не используются магнитные материалы, данные устройства не подвержены влиянию магнитного поля постоянного тока. Кроме того, описанный выше синхронный демодулятор отфильтровывает сигналы на других частотах, отличных от частоты возбуждения первичной обмотки. Такой принцип подавления не применим в датчиках Холла и магниторезистивных датчиках.
Поскольку в этих датчиках не используются магнитные материалы, данные устройства не подвержены влиянию магнитного поля постоянного тока. Кроме того, описанный выше синхронный демодулятор отфильтровывает сигналы на других частотах, отличных от частоты возбуждения первичной обмотки. Такой принцип подавления не применим в датчиках Холла и магниторезистивных датчиках.
Измерение положения с помощью индуктивных датчиков – новая технология.
В индуктивных датчиках положения проводники печатной платы используются для определения положения объекта, а объектом измерения является металлический предмет. На самом деле, эта технология давно является общепринятой – лишь изменился способ измерения. Принцип работы линейного дифференциального трансформатора напряжения (LVDT) очень схож с принципом измерений индуктивного датчика положения. В этом трансформаторе первичная обмотка и две вторичные обмотки определяют положение металлической рукоятки в робототехнических приложениях. В индуктивных датчиках положения применяются во многом схожие методы, которые к тому же позволяют разместить проводники катушки на печатной плате.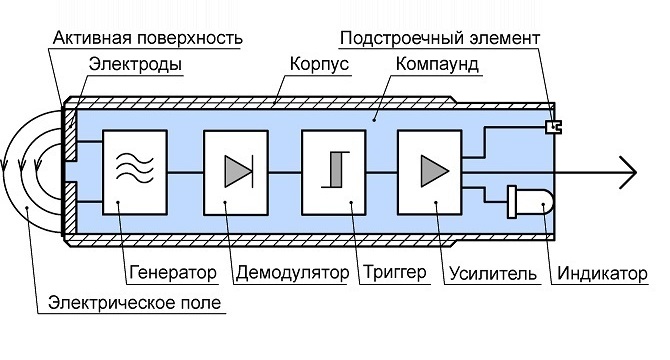
В магнитных вращающихся трансформаторах, представляющих собой разновидность LVDT-трансформатора, применяются те же методы. И в этом случае не трансформатор определяет положение металлического объекта, а индуктивный датчик с помощью проводников печатной платы. Для определения координат все три названных устройства измеряют соотношение между двумя напряжениями, индуцированными возмущенным магнитным полем проводящего элемента.
Из-за дублирующего датчика объем занимаемого пространства удваивается.
Критически важным автомобильным и промышленным приложениям часто необходима избыточность для обеспечения самого высокого уровня безопасности. Благодаря оптимизации слоев печатной платы и некоторым инновационным методам создания первичной обмотки сдвоенному датчику не требуется в два раза больше места на печатной плате по сравнению с одинарным устройством (см. рис. 4).
Рис. 4. Решение с двумя датчиками
Два гальванически изолированных датчика, свободно связанных с полем, совместно измеряют величину одного и того же магнитного поля. Вторичные обмотки соединены с двумя микросхемами, с которых поступают два независимых сигнала о положении объекта, что повышает безопасность приложения.
Вторичные обмотки соединены с двумя микросхемами, с которых поступают два независимых сигнала о положении объекта, что повышает безопасность приложения.
Индуктивные датчики положения измеряют только небольшие линейные перемещения.
Индуктивные датчики положения могут измерять линейные перемещения в достаточно широком диапазоне. Наилучшая точность достигается в тех случаях, когда длина датчика сопоставима с диапазоном измерений; при этом выходное разрешение может масштабироваться даже при измерении минимального расстояния. Длина датчика варьируется в диапазоне 5–600 мм и выше. Любые ограничения по длине должны соотноситься со способностью осциллятора генерировать корректный сигнал для резонансного LC-контура. Во всех случаях применяется один и тот же принцип работы: определяются изменения генерируемого магнитного поля.
Измерение линейных перемещений – заметное преимущество этой технологии, а требуемая чувствительность достигается с помощью единого принципа измерения во многих используемых на практике диапазонах. В то же время для выполнения аналогичной задачи может потребоваться несколько мультиплексированных датчиков Холла, чтобы магнит перемещался из одного положения в другое. Перекрестное управление таким мультиплексированием достаточно сложное, а на результаты измерения может влиять изменение температуры. Индуктивный датчик не имеет таких недостатков и измеряет линейные перемещения в соответствии с требованиями приложений.
В то же время для выполнения аналогичной задачи может потребоваться несколько мультиплексированных датчиков Холла, чтобы магнит перемещался из одного положения в другое. Перекрестное управление таким мультиплексированием достаточно сложное, а на результаты измерения может влиять изменение температуры. Индуктивный датчик не имеет таких недостатков и измеряет линейные перемещения в соответствии с требованиями приложений.
Индуктивные датчики положения измеряют только линейные перемещения.
Датчики этого типа могут измерять не только линейные, но и вращательные и дуговые перемещения с не меньшей точностью при более высокой помехоустойчивости. Индуктивная технология применяется для измерения положения автомобильных педалей, воздушных и водяных клапанов, а также роторов. Например, 360-градусный датчик положения ротора устроен как изогнутый линейный датчик с соединенными концами. Индуктивные датчики для измерения круговых перемещений – самые точные приборы благодаря тому, что генерируемое магнитное поле является очень однородным вдоль всех радиусов. Таким образом, эта технология обеспечивает измерение линейных, круговых и дуговых перемещений.
Таким образом, эта технология обеспечивает измерение линейных, круговых и дуговых перемещений.
Измеряемые объекты должны быть изготовлены из магнитного материала.
Датчики рассматриваемого типа определяют изменения магнитного поля под влиянием перемещающегося металлического объекта, но в использовании магнитного материала нет необходимости. Все проводящие ток объекты вызывают появление вихревых токов, возмущающих магнитное поле (см. рис. 5).
Рис. 5. Вихревые токи, наведенные в металлической структуре
Чтобы увеличить расстояние, на котором определяется положение металлического объекта, а также уменьшить потребляемый ток, в качестве металлов с наилучшими проводящими свойствами применяется медь, алюминий или сталь.
Индуктивные датчики положения программируются внешними устройствами.
В автомобилях часто применяются датчиковые модули, которые подключаются к блокам управления двигателем с помощью проводов. Как правило, к датчику подключаются провода питания и заземления, а также выходного контакта. Калибровка модуля с помощью силового вывода исключает необходимость в дополнительных подключениях к печатной плате с датчиком, что позволяет сэкономить расходы и проблемы сборки. Однако в некоторых встраиваемых приложениях датчик может программироваться с помощью внешнего микроконтроллера, например LX3302A от компании Microchip с помощью выводов GPIO.
Как правило, к датчику подключаются провода питания и заземления, а также выходного контакта. Калибровка модуля с помощью силового вывода исключает необходимость в дополнительных подключениях к печатной плате с датчиком, что позволяет сэкономить расходы и проблемы сборки. Однако в некоторых встраиваемых приложениях датчик может программироваться с помощью внешнего микроконтроллера, например LX3302A от компании Microchip с помощью выводов GPIO.
Разработчики не получают помощи от производителей компонентов.
Не так давно для получения хороших результатов требовалось обладать хорошим опытом проектирования приложений с магнитными датчиками, доступом к самым современным средствам моделирования методом конечных элементов или большим терпением для реализации проекта методом проб и ошибок. В настоящее время производители ИС предоставляют клиентам демонстрационные платы и наборы, которые позволяют не только начать с разработки модели, но и выполнить полноценные симуляции проводников печатной платы. Некоторые вендоры даже предоставляют результаты симуляций с анализом погрешности датчика до этапа испытаний печатной платы.
Некоторые вендоры даже предоставляют результаты симуляций с анализом погрешности датчика до этапа испытаний печатной платы.
Шифр статьи: МСА816
Размещение статей, рекламы, новостей и подписка: [email protected]
Индуктивное определение положения » Жаберные датчики и элементы управления —
Индуктивное определение положения » Жаберные датчики и элементы управления —Датчики и элементы управления
Индуктивное определение положения
Введение
Индуктивные датчики используются в различных приложениях для измерения позиционного перемещения коробок передач, педалей и механических рычагов, и это лишь некоторые из них.
Индукционные датчики положения способны измерять линейные, угловые, вращательные и неравномерные перемещения в диапазоне измерений от 20 мм до 100 мм и выше.
Трехэтапный процесс
Принцип индукционного определения положения состоит из трех этапов.
Индукционные датчики Гилла используют серию катушек, которые измеряют положение металлической цели, называемой активатором. Активатор может быть установлен или врезан в подвижную часть устройства.
На первом этапе катушка генерирует магнитное поле, которое проникает в активатор, заставляя его создавать собственное противоположное поле.
Затем катушка перестает генерировать свое магнитное поле и измеряет поле, наведенное активатором.
Наконец, это измерение индуцированного поля сравнивается между сериями катушек для расчета абсолютного измерения положения активатора.
Более высокая точность
Этот принцип измерения позволяет использовать датчики положения Gill для широкого спектра типов измерений без механических ограничений или необходимости механического управления.
Постоянный воздушный зазор между датчиком и активатором гарантирует, что датчик не изнашивается и не изнашивается при использовании, и, в отличие от технологии на эффекте Холла, на индукционную технологию не влияет присутствие постоянных магнитов или магнитного поля Земли, а также она не дрейфует при изменении температуры .
Датчик положения педали дроссельной заслонки — F1 Racing Team
ПОДРОБНЕЕ
Индуктивные датчики положения
ПОДРОБНЕЕ
Спасибо, что нашли время, чтобы поделиться с нами своими мыслями. Если нам нужно будет ответить на ваше сообщение, мы сделаем это как можно скорее.
Затраты сотрудников в час (£):
Средний доход в час (£):
Количество сотрудников, пострадавших от простоя (%):
Доход, затронутый простоем (%):
Среднечасовая стоимость простоя (£) :
Количество единиц, производимых в час:
Средняя прибыль на единицу (£):
Часов простоя:
Расчетная упущенная выгода за час простоя (£):
;
Имя *
Номер телефона
Эл. адрес *
Название организации
Страна *
Ваш запрос *
Предоставляя эту информацию, я соглашаюсь получать коммерческую информацию от Gill Sensors & Controls Ltd.
