Как правильно подключить трехфазный асинхронный двигатель к однофазной сети. Какие схемы подключения существуют. Какие нюансы нужно учитывать при таком подключении. На что обратить внимание при выборе конденсаторов.
Особенности работы трехфазного двигателя от однофазной сети
Подключение трехфазного асинхронного двигателя к однофазной сети — распространенная задача, особенно в бытовых условиях, где часто отсутствует трехфазное питание. Однако такое подключение имеет ряд особенностей:
- Снижается мощность двигателя до 70-80% от номинальной
- Уменьшается пусковой момент
- Возрастает нагрев обмоток из-за несимметрии токов
- Требуется применение пусковых и рабочих конденсаторов
Несмотря на эти ограничения, при правильном подключении трехфазный двигатель может достаточно эффективно работать от однофазной сети.
Основные схемы подключения трехфазного двигателя к однофазной сети
Существует несколько базовых схем подключения:

1. Схема с рабочим конденсатором
Это простейшая схема, где используется только один рабочий конденсатор. Она подходит для двигателей малой мощности до 0.5-1 кВт.
2. Схема с рабочим и пусковым конденсаторами
В этой схеме применяется дополнительный пусковой конденсатор, который отключается после запуска. Такая схема обеспечивает больший пусковой момент и подходит для двигателей мощностью до 2-3 кВт.
3. Схема с расщепленной фазой
Здесь используются две группы обмоток статора, одна из которых подключается через фазосдвигающий конденсатор. Эта схема позволяет получить характеристики, близкие к работе от трехфазной сети.
Выбор конденсаторов для подключения трехфазного двигателя
Правильный подбор конденсаторов — ключевой момент при подключении трехфазного двигателя к однофазной сети. Необходимо учитывать следующие факторы:
- Мощность и номинальный ток двигателя
- Напряжение питающей сети
- Коэффициент мощности двигателя
Ориентировочно емкость рабочего конденсатора можно рассчитать по формуле:
C (мкФ) = 2800 * P (кВт) / U (В)
где P — мощность двигателя, U — напряжение сети.
Практические рекомендации по подключению
При подключении трехфазного двигателя к однофазной сети следует придерживаться следующих рекомендаций:
- Убедитесь, что мощность двигателя не превышает 2-3 кВт. Для более мощных двигателей лучше использовать специальные преобразователи.
- Используйте качественные конденсаторы, рассчитанные на соответствующее напряжение и ток.
- Обеспечьте надежное заземление двигателя.
- При первом пуске внимательно следите за нагревом двигателя и вибрацией.
- Не перегружайте двигатель, работающий от однофазной сети.
Возможные проблемы при подключении и их решение
При подключении трехфазного двигателя к однофазной сети могут возникнуть следующие проблемы:
- Двигатель не запускается или запускается с трудом
- Повышенный шум и вибрация при работе
- Сильный нагрев обмоток
- Недостаточная мощность на валу
Для решения этих проблем можно попробовать следующие меры:
- Проверить правильность подключения и исправность конденсаторов
- Увеличить емкость пускового конденсатора
- Уменьшить нагрузку на валу двигателя
- Обеспечить лучшее охлаждение двигателя
Альтернативные способы питания трехфазных двигателей
Кроме прямого подключения к однофазной сети, существуют и другие способы питания трехфазных двигателей:

- Использование частотных преобразователей
- Применение фазорасщепителей
- Использование роторно-фазных преобразователей
Эти методы позволяют получить более высокие характеристики работы двигателя, но требуют дополнительных затрат на оборудование.
Законодательные аспекты подключения трехфазных двигателей к однофазной сети
При подключении трехфазного двигателя к однофазной сети важно учитывать законодательные аспекты:
- Соблюдение правил устройства электроустановок (ПУЭ)
- Получение необходимых разрешений, если речь идет о промышленном применении
- Соответствие требованиям пожарной безопасности
Нарушение этих требований может привести к серьезным последствиям, вплоть до административной и уголовной ответственности.
Экономическая целесообразность использования трехфазного двигателя в однофазной сети
Перед подключением трехфазного двигателя к однофазной сети стоит оценить экономическую целесообразность такого решения. Следует учесть:
- Стоимость конденсаторов и дополнительного оборудования
- Снижение КПД и мощности двигателя
- Возможное сокращение срока службы двигателя
- Затраты на обслуживание и ремонт
В некоторых случаях может оказаться выгоднее приобрести специализированный однофазный двигатель или использовать другие альтернативы.

подключение, выбор мощности, частоты вращения.
Применение асинхронных двигателей
Асинхронные двигатели являются самым распространенным видом электрических машин, применяющихся в различных отраслях промышленности, транспорта, ЖКХ, предприятиях торговли, складских помещениях и т.д.
В диапазоне мощностей от десятков ватт и до сотен киловатт их парк составляет более 90% от всех других типов двигателей.
Их основными достоинствами являются простота конструкции, надежность, высокая перегрузочная способность, экономичность, низкий уровень шума, невысокая стоимость.
Принцип действия, технические параметры
Работа трехфазного асинхронного электродвигателя (АД) основана на том, что вращающийся в воздушном зазоре магнитный поток наводит в стержнях ротора взаимодействующий с ним вторичный ток.
В результате этого взаимодействия возникает электромагнитный момент, увлекающий за собой ротор. Величина момента пропорциональна векторному произведению значений тока и потока.
Определения технических характеристик АД приведены в Таблице 1.
Таблица 1
|
Наименование |
Обознач. |
Примечание |
|
Номинальное напряжение питания |
Uн, В |
Линейное напряжение. В соответствии с ГОСТ 31606-2012 значения Uн соответствуют ряду 220, 230, 380, 400, 660 и 660 В;
|
|
Обороты холостого хода |
n0, об/мин |
Обороты холостого хода, или синхронная частота вращения. В зависимости от количества полюсов обмотки статора она может быть равна 500, 600, 750, 1000, 1500 и 3000об/мин. n0 вычисляется по формуле: n0 = 3000/P, где P –
число пар полюсов. |
|
Номинальные обороты |
nн, об/мин |
Номинальные обороты — частота вращения ротора при номинальной нагрузке |
|
Номинальный ток |
Iн, А |
Линейный ток двигателя, потребляемый из сети при номинальной нагрузке |
|
Пусковой ток |
Iп, А |
Ток в начале пуска двигателя при заторможенном роторе |
|
Номинальный момент |
Мн, нм |
Номинальный момент двигателя |
|
Пусковой момент |
Мп, нм |
Момент двигателя в начале пуска при заторможенном роторе |
|
Критический момент |
Мк, нм |
Максимально возможный момент, развиваемый двигателем |

Вследствие нелинейности механической характеристики асинхронных двигателей всегда выполняется условие: Мк > Мн > Мп.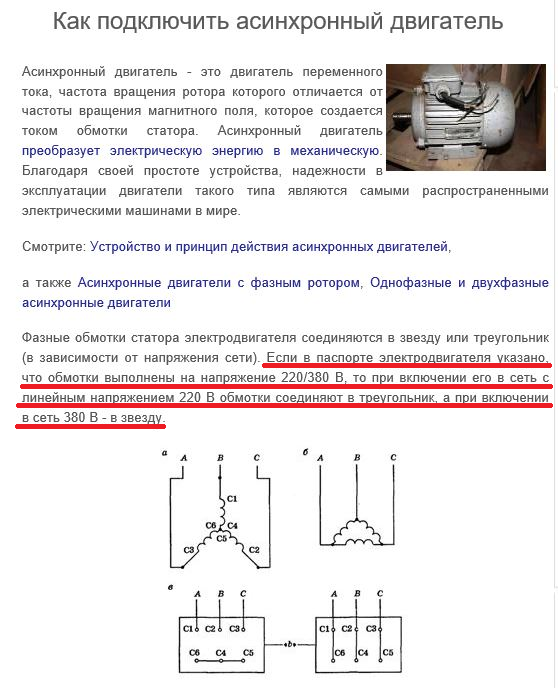
Маркировка обмоток
Концы статорных обмоток выводятся на резьбовые зажимы коробки выводов.
Начала и концы обмоток фаз А, В, С обозначаются буквами U1 – U2, V1 – V2, W1 – W2 соответственно.
До принятия современных обозначений буквами латинского алфавита применялась маркировка С1 — С4, С2 – С5, С3 – С6, Рис. 1а), которая часто встречается и поныне.
Для соединения обмоток в треугольник нужно соединить их выводы в соответствии с Рис.1в), а для соединения обмоток электродвигателя звездой с Рис.1б).
Рисунок 1
АД могут иметь следующие номинальные значения напряжений: 127/220- D/Y, 220, 220/380- D/Y, 230/400-D/Y, 380, 380/660- D/Y, 690 В. Маркировка D означает треугольник, Y — звезду.
Все номинальные данные наносятся на шильдик и указываются в паспорте.
Рисунок 2
Присоединение электродвигателей к сети питания
Возможные сочетания схем обмоток и напряжений питания приведены в Таблице 2.
Таблица 2
Таблица 2
|
Линейное напряжение сети, Uc, В |
127 |
220, 230 |
380, 400 |
660, 690 |
|||||
|
Напряжение двигателя Uн |
127/220 |
127/220
|
220 |
220/380 230/400 |
220/380 230/400 |
380
|
380/660
|
380/660
|
660 |
|
Соединение обмоток |
D |
Y |
|
D |
Y |
* |
D |
Y |
* |
ПРАВИЛО: Если Uс равно числителю дроби (220/380), обмотки соединяются в D, если знаменателю – в Y.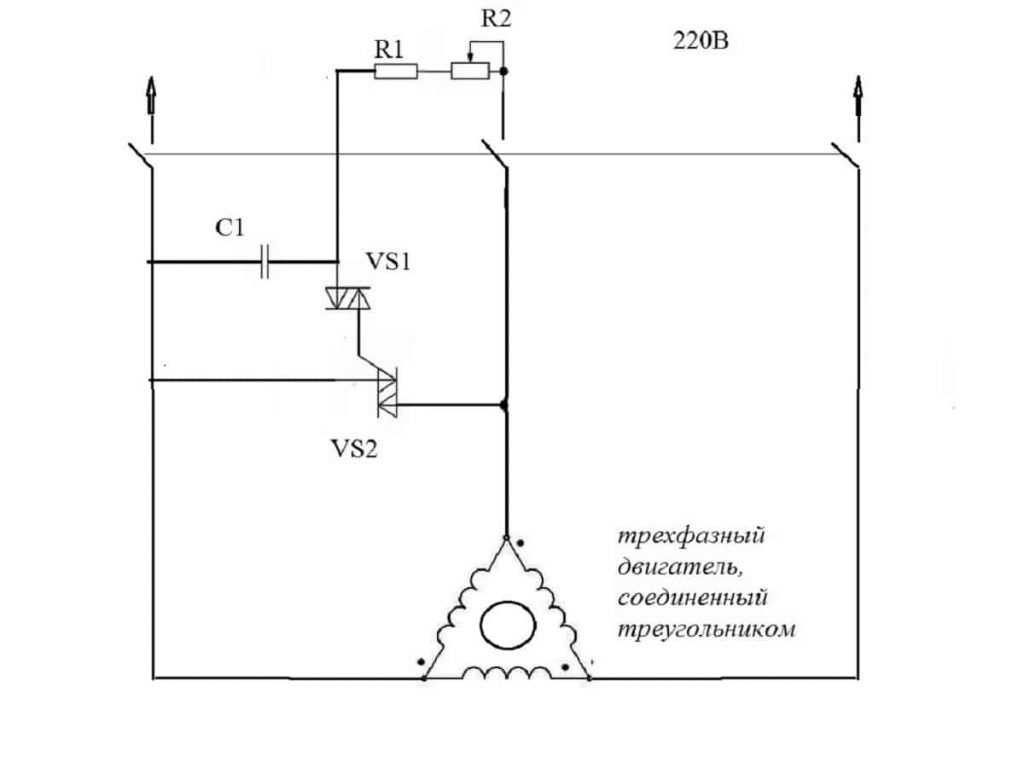
* ПРИМЕЧАНИЕ: Если на шильдике выбито 220, 380 или 690 В, то это означает, что обмотки уже соединены на заводе-изготовителе по схеме, соответствующей указанному напряжению.
Допускается работа АД на пониженном напряжении: можно вместо 380В подать 220В, но нужно иметь в виду, что электромагнитный момент снизится в три раза.
ВНИМАНИЕ! На повышенное напряжение двигатель подключать категорически нельзя, так как из-за насыщения магнитной цепи уменьшится индуктивное сопротивление статорных обмоток, а это приведет к недопустимому возрастанию потребляемого тока и перегреву двигателя.
На практике часто встречаются двигатели, у которых отсутствует шильдик, или он поврежден так, что надписи на нем неразличимы.
В этом случае можно экспериментально определить номинальные параметры: мощность, ток и частоту вращения.
Работу нужно проводить в такой последовательности:
а) при отсутствии маркировки мультиметром прозвонить выводы обмоток каждой фазы и измерить их омическое сопротивление: сопротивления должны быть одинаковыми;
б) мегомметром измерить сопротивление изоляции обмоток относительно корпуса: оно не должно быть меньше 0,5 МОм;
в) по габаритным размерам с помощью справочников по электрическим машинам определить предварительно номинальную мощность электромотора;
г) соединить начала и концы статорных обмоток по схеме Y и подключить мотор к сети через автоматический выключатель с электромагнитной защитой;
д) убедиться, что он вращается без гула, механических вибраций и не греется.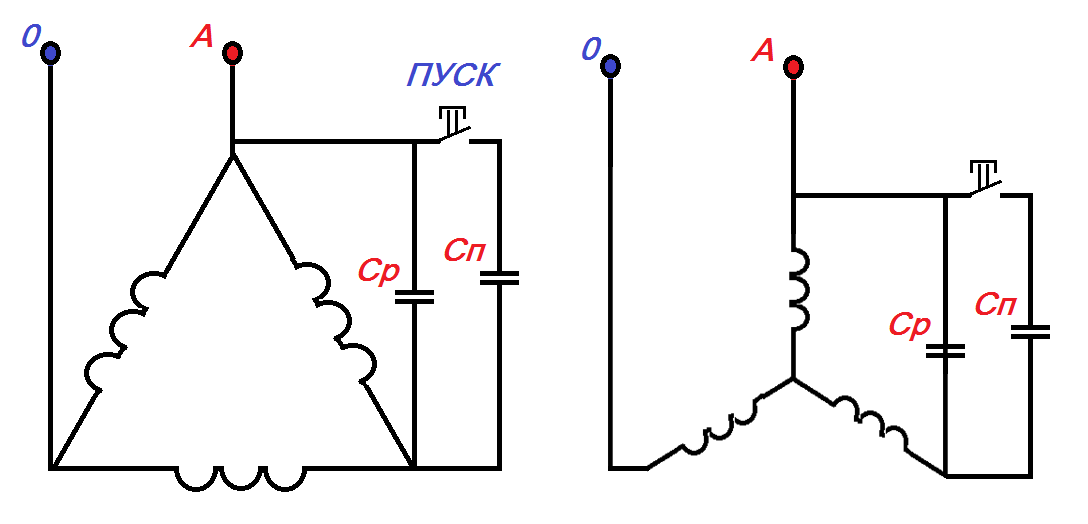
Затем токоизмерительными клещами измерить ток холостого хода Iхх, а с помощью тахометра количество оборотов вала в минуту.
Ток холостого хода примерно равен 40% от номинального – отсюда можно вычислить Iн и уточнить мощность: Iн = 2,5Iхх
Двухступенчатый пуск
Этот способ применяется при включении мощных электроприводов с инерционной нагрузкой, обладающей большими маховыми массами, чтобы уменьшить нагрузку на питающую линию.
На первой ступени на статор, соединенный в Y, подается напряжение сети, равное номинальному для D. Например, двигатель с Uн = 380/660- D/Y подключается к сети 380 В.
После разгона до установившейся скорости, обмотка переключается на D, что соответствует номинальному режиму работы.
Силовая схема такого электропривода приведена на Рис.3.
В начале схема управления включает пускатели К1и К3, происходит соединение в звезду. Через время, отведенное на запуск, К3 отключается, включается К2, происходит переключение на треугольник.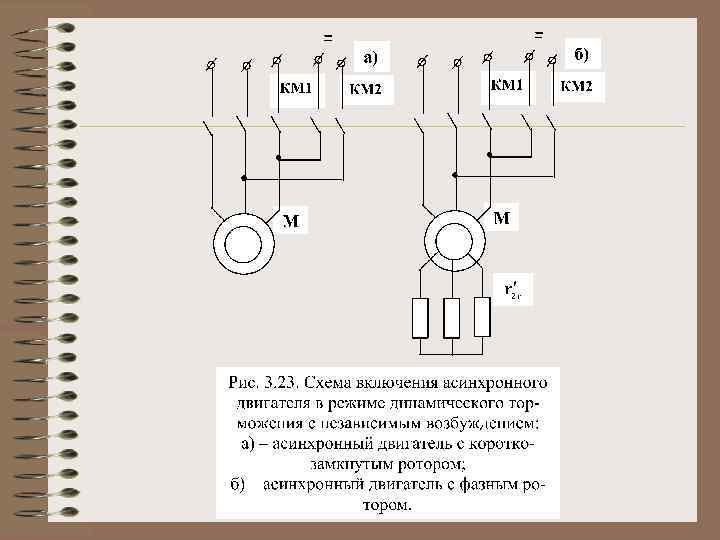
Рисунок 3
Работа электродвигателя от одной фазы
Такая необходимость возникает чаще всего в быту, при использовании двигателя в качестве электропривода пилорамы, насоса для полива огорода, электроподъемника и т.д.
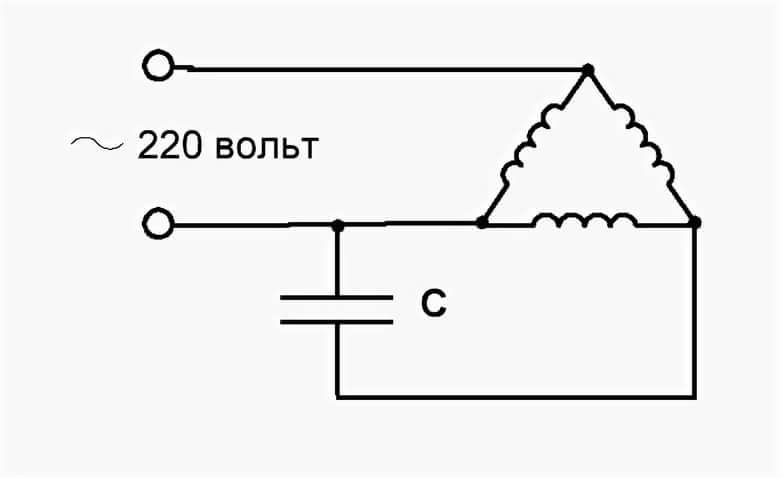
Необходимый временной сдвиг фазных токов достигается включением последовательно с одной из обмоток рабочего конденсатора Сраб, Рис.4.
За счет того, что магнитное поле при этом будет не круговым, а эллиптичным, полезная мощность уменьшится примерно на 20 — 30% от номинальной.
Для увеличения пускового момента при работе от однофазной сети на время разгона подключается дополнительный пусковой конденсатор Сп.
Оставлять его постоянно включенным нецелесообразно, так как из-за резонансных явлений возможно увеличение напряжения на емкости до недопустимо больших пределов.
Ориентировочно емкость рабочего конденсатора можно рассчитать из следующего выражения:
1) Для треугольника Сраб = 4500хIн/Uс, мкФ
2) Для звезды Сраб = 2500хIн/Uс, мкФ
Величина пусковой емкости рассчитывается как Сп = Сраб (2 – 3).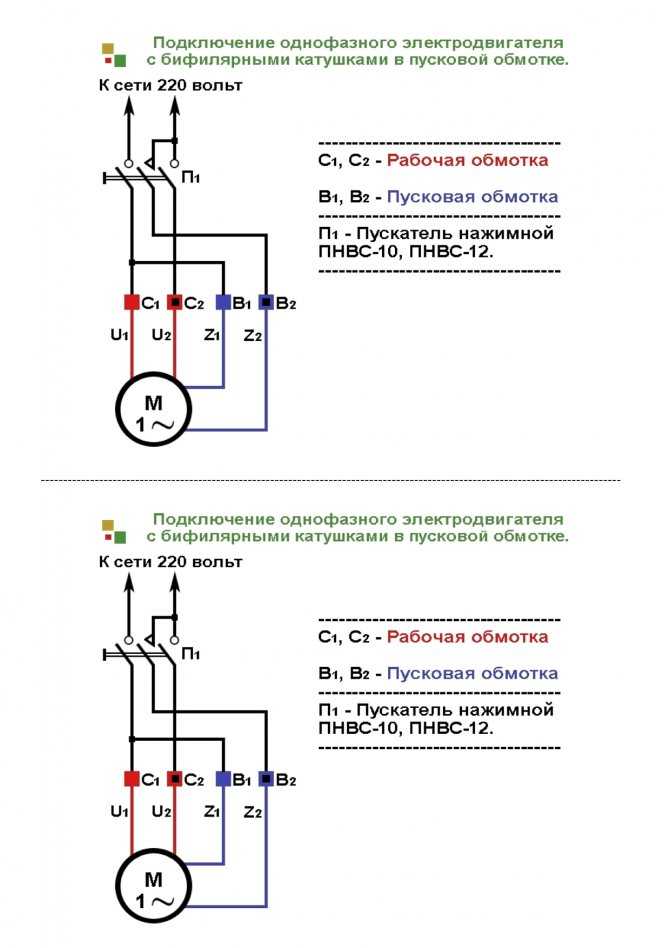
Рабочее напряжение конденсаторов должно быть не менее 400 В.
В качестве емкостей рекомендуется применять бумажные конденсаторы типа МБГО, МБГВ и т.д, категорически нельзя использовать полярные (электролитические) – они просто раздуются и разорвутся.
Рисунок 4
Типовая схема включения
В релейно-контакторных схемах управления электроприводами широко используются включение электродвигателя через магнитный пускатель, Рис.5.
Магнитный пускатель представляет собой электромагнитное реле, снабженное мощными силовыми контактами с повышенной коммутационной способностью.
Они выпускаются в шести габаритах, в зависимости от мощности и характера электрической нагрузки.
Наиболее распространены пускатели типов ПМ, ПМА, ПМЛ с контактами, рассчитанными на токи от 6,3 до 250 А.
Для защиты электрических цепей от перегрузки и коротких замыканий служат автоматические выключатели.
Наиболее распространенные из них ВА-47, Ва-21 выпускаются в одно, двух, трех и четырех полюсном исполнении.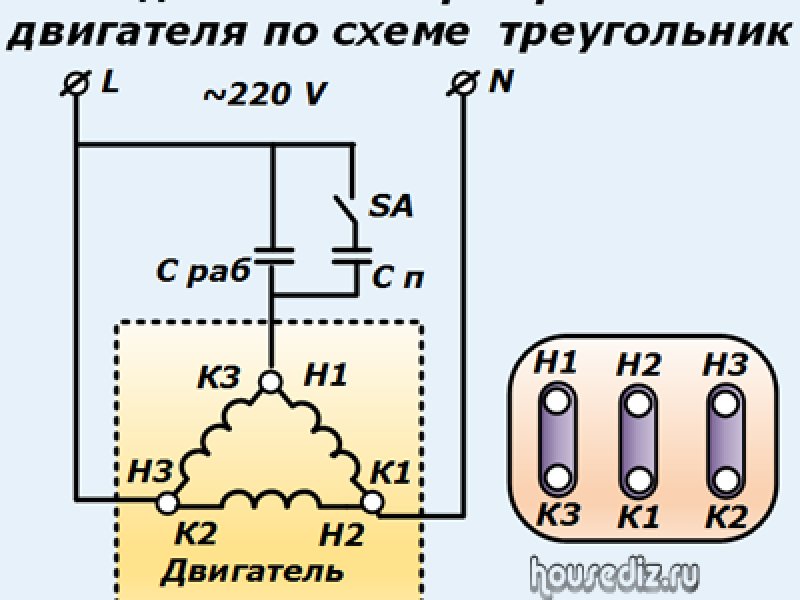
При выборе пускателей и выключателей нужно соблюдать следующие основные правила:
- номинальное рабочее напряжение должно быть равно или больше сетевого;
- контакты аппаратов должны выдерживать включение и выключение силовых цепей в рабочих и аварийных режимах.
- должна быть предусмотрена защита двигателя от перегрузки и коротких замыканий.
Также для управления электроприводами применяются различные комплектующие: промежуточные реле и реле времени, реле тепловой и максимальной защиты, кнопки, переключатели, сигнальные лампы, предохранители и т.п.
Рисунок 5
Выключатель АВ1 подает питание в схему и на силовые контакты КМ1. Пуск двигателя Д производится кнопкой Пуск, отключение кнопкой Стоп. При токовой перегрузке срабатывает реле тепловой защиты КК и отключает пускатель КМ.
Реверс электропривода
Для изменения направления вращения в коробке выводов следует перебросить два любых сетевых провода.
На Рис. 6 изображена простейшая схема реверса.
Рисунок 6
Кнопкой SB2 включается пускатель KM1, который своими контактами KM1 подает на электромотор М напряжение прямой последовательности: А, В, С. Чтобы изменить направление вращения нужно кнопкой SB1 отключить KM1, затем кнопкой SB3 включить KM2, при этом последовательность чередования фаз изменится на обратную: С, В, А.
На Рис. 7 показана схема реверса двигателя, работающего от однофазной сети.
Переключателем SA меняется полярность подключения одной из фаз.
Рисунок 7
Регулирование частоты вращения асинхронных двигателей
Существует несколько способов регулирования:
- изменением напряжения питания;
- применением многоскоростных АД;
- регулированием частоты питающей сети
Снижением напряжения питания можно добиться небольшого уменьшения оборотов – не более, чем на 10 – 15%. Недостаток способа: малый диапазон регулирования и повышенный нагрев обмоток. В настоящее время он практически не применяется. Существуют двух и трехскоростные АД, у которых переключением катушек статора изменяется количество пар полюсов от 1 до 3. Меняя количество полюсов можно ступенчато устанавливать требуемые обороты: например, 3000, 1500, 1000 об/мин. Наилучшим и самым экономичным способом является регулирование оборотов при помощи частотного преобразователя (ПЧ).
Существуют двух и трехскоростные АД, у которых переключением катушек статора изменяется количество пар полюсов от 1 до 3. Меняя количество полюсов можно ступенчато устанавливать требуемые обороты: например, 3000, 1500, 1000 об/мин. Наилучшим и самым экономичным способом является регулирование оборотов при помощи частотного преобразователя (ПЧ).
Типовые технические характеристики ПЧ:
- питающая сеть – одна или три фазы: 220, 400, 690 В
- выходная мощность от 0,1 до 600 кВт;
- выходное напряжение – 220, 380, 690В;
- выходная частота – от 1 до 200 Гц.
ПЧ широко применяются в электроприводах систем вентиляции, отопления, кондиционирования, станциях перекачивания, скважинных погружных насосов, установках полива растений, транспортных тележек, электроинструментов и т.д. За счет программной установки режимов плавного пуска и торможения исключаются ударные нагрузки на валы исполнительных механизмов. Кроме того, ПЧ позволяют значительно снизить энергопотребление и потери в электрических сетях за счет поддержания оптимальной производительности оборудования.
Заключение
В настоящей статье содержится первичная информация о принципах работы асинхронных электродвигателей. Изложенных сведений достаточно, чтобы самостоятельно производить монтаж и отладку электрооборудования любому человеку, не имеющему специальных знаний в области электротехники.
Подключение асинхронного электродвигателя
Асинхронным электродвигателем называют, как правило, специальную электрическую асинхронную машину, преобразующую электрическую энергию в механическую. Основным принципом в работе асинхронного электродвигателя являются следующие физические свойства. Трехфазный переменный ток, проходящий по обмоткам статора, вызывает возникновение вращающегося магнитного поля. Данное магнитное поле взаимодействует с током, возникшим в результате индукции поля статором в роторных обмотках.
Содержание
Особенности подключения асинхронного двигателя
Эти факторы должны в обязательном порядке учитываться, когда производится подключение асинхронного электродвигателя, поскольку после всех взаимодействий появляются определенные механические усилия, которые и производят вращение ротора в сторону, по направлению магнитного поля. При этом, ротор должен вращаться с частотой, меньшей, чем частота вращения поля. Таким образом, совершается асинхронное вращение ротора по отношению к магнитному полю.
При этом, ротор должен вращаться с частотой, меньшей, чем частота вращения поля. Таким образом, совершается асинхронное вращение ротора по отношению к магнитному полю.
Асинхронные электродвигатели имеют большое количество конструктивных решений, зависящих от их предназначения и условий работы. Они бывают общего назначения с водяным или воздушным охлаждением. Для работы в особых условиях существуют маслонаполненные, герметичные и взрывобезопасные электродвигатели.
Выпускаются для автоматических систем, схем телемеханики, систем слежения, как правило, в комплекте с пускозащитной аппаратурой, управляющими блоками и встроенными редукторами, имеющие ступенчатую регулировку скорости.
Характеристики асинхронного электродвигателя
Рабочие и пусковые характеристики асинхронных трехфазных электродвигателей значительно превышают аналогичные показатели своих однофазных собратьев. Основными элементами конструкции стандартного двигателя являются статор и ротор, соответственно, неподвижная и подвижная части. Роторная обмотка в асинхронном двигателе выполняется в двух вариантах – с применением контактных колец и короткозамкнутые.
Роторная обмотка в асинхронном двигателе выполняется в двух вариантах – с применением контактных колец и короткозамкнутые.
Воздушный зазор, расположенный между статором и ротором должен иметь минимальное значение. Ротор асинхронного двигателя вращается с частотой, полностью зависящей от частоты, с которой происходит вращение магнитного поля статора. Частота вращения зависит, также, от частоты питающего тока и количества пар полюсов на двигателе.
Подключение асинхронного электродвигателя, имеющего короткозамкнутый ротор должно осуществляться напрямую в сеть только для двигателей, мощность которых не более 200 киловатт. Это связано с тем, что при пуске такого двигателя происходит возникновение пускового тока, превышающего силу обычного номинального тока в 5-6 раз. Электродвигатели с мощностью более 200 киловатт, первоначально подключаются через пониженное напряжение, что позволяет снизить силу пускового тока, примерно, в 2-3 раза.
Подключение трехфазного асинхронного электродвигателя
Конструкция и принцип действия асинхронного двигателя
Ротор с короткозамкнутым ротором и контактным кольцом
Асинхронный двигатель также называют асинхронным двигателем, поскольку асинхронные двигатели работают по принципу индукции. Асинхронный двигатель укорочен с помощью ASM или IM. В моторном режиме ротор асинхронного двигателя вращается медленнее, чем магнитное вращающееся поле статора, то есть асинхронно со статором. Разница между скоростью вращения статора и скоростью вращения ротора также называется скольжением. Когда скорость ротора равна скорости статора, скольжение равно нулю и асинхронный двигатель не обеспечивает положительного крутящего момента. В генераторном режиме ротор вращается быстрее, чем вращающееся поле от статора. Разница скоростей создает отрицательный крутящий момент, который пытается замедлить ротор.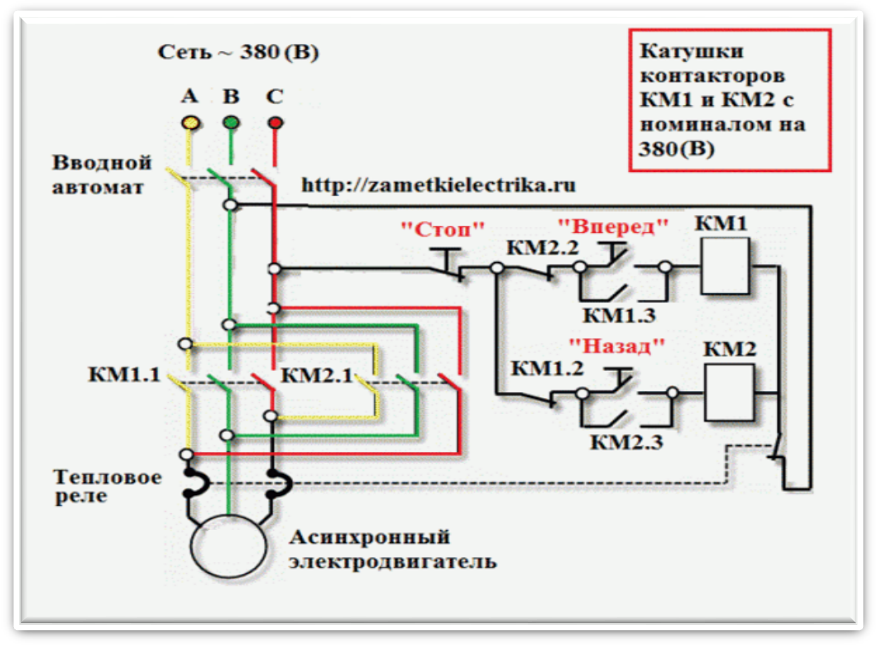 Асинхронные двигатели, работающие напрямую от двухфазного переменного тока или трехфазного трехфазного тока без инвертора, имеют меньший КПД, чем синхронные двигатели с постоянными магнитами. Однако асинхронные двигатели, работающие с инвертором, могут достигать такого же высокого КПД.
Асинхронные двигатели, работающие напрямую от двухфазного переменного тока или трехфазного трехфазного тока без инвертора, имеют меньший КПД, чем синхронные двигатели с постоянными магнитами. Однако асинхронные двигатели, работающие с инвертором, могут достигать такого же высокого КПД.
Конструкция асинхронного двигателя
Существует два различных типа асинхронных двигателей: с короткозамкнутым ротором и контактным кольцом. Структура статора одинакова для обоих и аналогична структуре синхронного двигателя. Для проведения магнитного потока в электродвигателе статор и ротор состоят из нескольких слоев электротехнического листа, толщина которого обычно составляет 0,5 мм. Чем тоньше выполнен электротехнический лист, тем меньше потери на вихревые токи в электродвигателе и выше его КПД. Статор несет обмотки, по которым протекает трехфазный ток. Обычно статор имеет три фазы двигателя, которые можно соединить звездой или треугольником. Однако есть двигатели и с большим, и с меньшим количеством фаз, что зависит в первую очередь от предполагаемого использования и напряжения питания. Ротор содержит короткозамкнутые токопроводящие стержни или обмотки в зависимости от типа асинхронного двигателя.
Ротор содержит короткозамкнутые токопроводящие стержни или обмотки в зависимости от типа асинхронного двигателя.
Воспроизвести видео о работе асинхронного двигателя video
Асинхронный двигатель с короткозамкнутым ротором
Ротор АД с короткозамкнутым ротором состоит из клетки из стержней, изготовленных из алюминия или меди. Стержни закорочены на верхнем и нижнем концах кольцами из того же материала. Чаще всего используется ротор с короткозамкнутым ротором, поскольку он не имеет контактных колец и, следовательно, имеет более длительный срок службы. Кроме того, производство ротора намного дешевле.
Асинхронный двигатель с ротором с контактными кольцами
Ротор с контактными кольцами состоит из обмоток вместо стержней. Обмотки не закорочены в роторе, а выведены наружу через токосъемные кольца и закорочены через дополнительные резисторы. Протекание тока в роторе можно контролировать с помощью резисторов снаружи электродвигателя.
Функция асинхронного двигателя
Вращающееся магнитное поле создается трехфазным током в обмотках статора.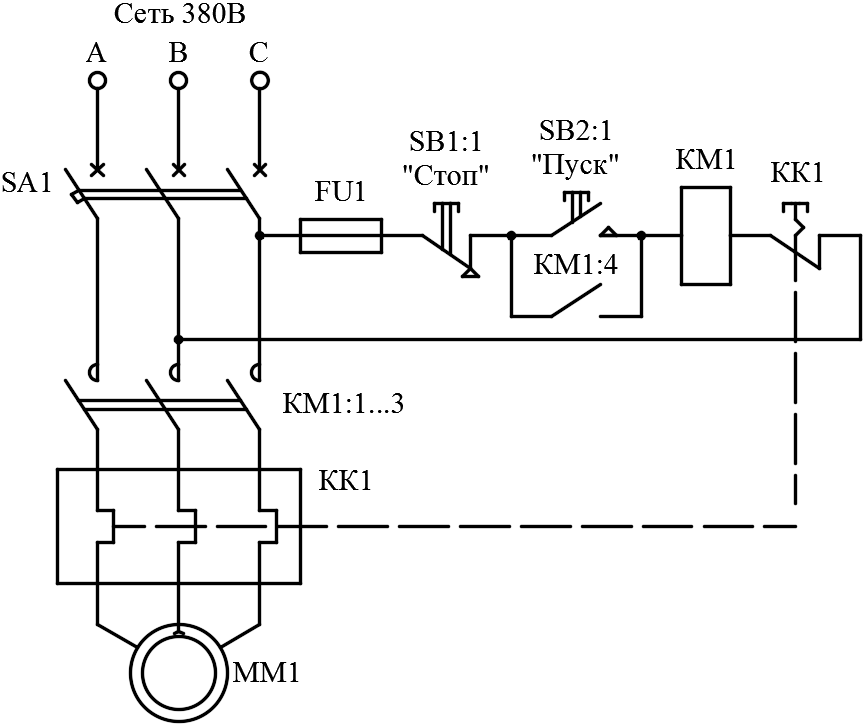 Вращающееся магнитное поле от статора также проходит через воздушный зазор через ротор. Если существует разница скоростей между скоростью вращения ротора и скоростью вращения статора, в токопроводящих стержнях ротора вращающимся магнитным полем индуцируется напряжение. Поскольку стержни проводника закорочены друг на друга на нижнем и верхнем концах, индуцированное напряжение генерирует ток в стержнях. Ток короткого замыкания в стержнях сам по себе создает магнитное поле в роторе, которое следует за магнитным полем статора. В отличие от синхронных двигателей с постоянными магнитами магнитное поле ротора не стационарно, а вращается поперек ротора. Когда ротор вращается с той же скоростью, что и статор, в токопроводящих стержнях больше не индуцируется ток и, следовательно, больше не создается крутящий момент. В случае короткого замыкания статора ротор больше не индуцирует напряжение. Это делает асинхронный двигатель очень безопасным электродвигателем, и именно поэтому крупные производители автомобилей, такие как Tesla и Audi, например, используют асинхронный двигатель в своих электромобилях.
Вращающееся магнитное поле от статора также проходит через воздушный зазор через ротор. Если существует разница скоростей между скоростью вращения ротора и скоростью вращения статора, в токопроводящих стержнях ротора вращающимся магнитным полем индуцируется напряжение. Поскольку стержни проводника закорочены друг на друга на нижнем и верхнем концах, индуцированное напряжение генерирует ток в стержнях. Ток короткого замыкания в стержнях сам по себе создает магнитное поле в роторе, которое следует за магнитным полем статора. В отличие от синхронных двигателей с постоянными магнитами магнитное поле ротора не стационарно, а вращается поперек ротора. Когда ротор вращается с той же скоростью, что и статор, в токопроводящих стержнях больше не индуцируется ток и, следовательно, больше не создается крутящий момент. В случае короткого замыкания статора ротор больше не индуцирует напряжение. Это делает асинхронный двигатель очень безопасным электродвигателем, и именно поэтому крупные производители автомобилей, такие как Tesla и Audi, например, используют асинхронный двигатель в своих электромобилях.
Преимущества и недостатки
Ознакомьтесь с преимуществами и недостатками асинхронных двигателей с ротором с контактными кольцами и короткозамкнутым ротором с инвертором и без него.
Ротор с контактными кольцами IM
Основным преимуществом асинхронного двигателя с контактными кольцами является более высокий крутящий момент в более низком диапазоне скоростей и более низкий пусковой ток. Однако дополнительные затраты на токосъемные кольца, а также на изготовление ротора с обмотками значительны. Поэтому сегодня ротор с контактными кольцами используется только для очень больших электродвигателей, где инвертор был бы слишком дорогим.
IM с короткозамкнутым ротором без инвертора
Основным преимуществом асинхронных двигателей с короткозамкнутым ротором являются низкие производственные затраты на ротор по сравнению с короткозамкнутым синхронным двигателем с постоянными магнитами. Асинхронный двигатель очень устойчив к высоким температурам.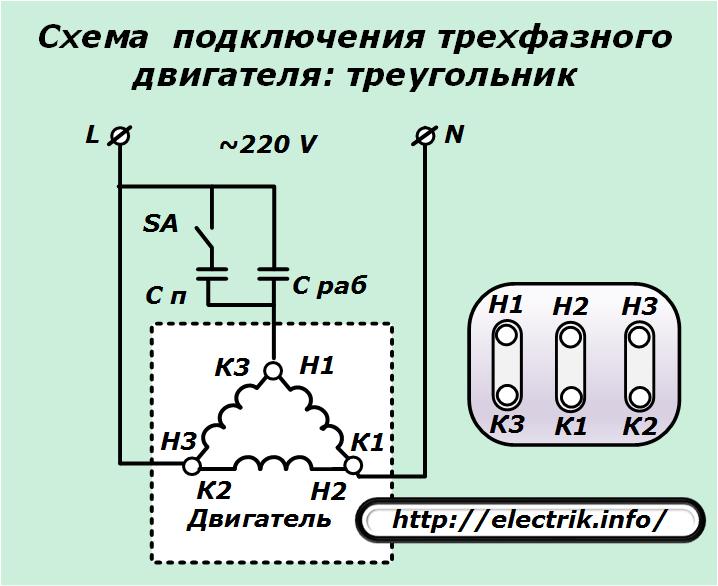 Вам не нужно беспокоиться о размагничивании магнитов, как в случае с PMSM. Основным недостатком является низкий пусковой момент и низкий КПД, если не использовать инвертор.
Вам не нужно беспокоиться о размагничивании магнитов, как в случае с PMSM. Основным недостатком является низкий пусковой момент и низкий КПД, если не использовать инвертор.
Беличья клетка IM с инвертором
С инвертором асинхронный двигатель может достигать такого же высокого КПД, как и СДПМ на высоких скоростях. Пиковая мощность и пиковый крутящий момент также очень хороши, так как вам не нужно беспокоиться о размагничивании магнитов. Непрерывная мощность может быть проблемой, если генерируемое тепло в роторе не может быть отведено должным образом.
ac — Трехфазный асинхронный двигатель, подключенный к однофазной энергосистеме
\$\начало группы\$
Я пытаюсь провести лабораторный эксперимент с трехфазным двигателем, подключенным к однофазному источнику питания. Схема выглядит следующим образом:
Я измерил все токи в обмотках двигателя, и они оказались примерно одинаковыми. (около 3 А, двигатель был почти на полной нагрузке)
Поскольку я считаю, что это не совсем возможно, потому что в этой конфигурации обмотки имеют разные потенциалы, я измерил сопротивление и индуктивность обмотки и сделал симуляцию в мультисим:
Оказывается, токи сильно различаются (хотя это смоделировано для условий запуска) Я считаю, что при вращении двигателя токи все равно должны отличаться, или я что-то упускаю? Я изучил несколько возможных случаев с разными номиналами конденсатора, но пришел к выводу, что даже если реактивный ток в L2 полностью компенсировался конденсатором, токи все равно должны сильно отличаться.
Я проверил соединения, которые я сделал 3 или 4 раза, и я 99% уверены, что были правы.
Может ли кто-нибудь помочь мне в этом? Спасибо
- двигатель
- переменный ток
- асинхронный двигатель
- электрический двигатель
\$\конечная группа\$
5
\$\начало группы\$
(хотя это смоделировано для условий запуска)
Ожидается, что ток для условий запуска будет намного выше, чем для работы. Кроме того, возможно, вы неправильно определили значения эквивалентных компонентов схемы. Значения обычно определяются с использованием результатов испытаний на холостом ходу и с заблокированным ротором в дополнение к определению сопротивления обмотки постоянного тока.
Не следует моделировать двигатель на основе противоЭДС. Вы должны использовать эквивалентную схему Штейнмеца.
