Как оптимизировать пусковые режимы мобильных роботов. Какие математические модели позволяют описать динамику робота при разгоне. Какие стратегии управления обеспечивают быстрый пуск робота. Как учесть нелинейные эффекты при моделировании движения робота.
Актуальность исследования динамики мобильных роботов
Мобильные колесные роботы находят все более широкое применение в различных сферах — от промышленности и сельского хозяйства до медицины и космических исследований. При этом к роботам предъявляются высокие требования по маневренности, быстродействию и точности движения по заданным траекториям. Особенно важно обеспечить эффективное управление в переходных режимах — при пуске, разгоне, торможении.
Однако существующие модели и методы управления не в полной мере учитывают нелинейную динамику роботов в неустановившихся режимах движения. Это ограничивает возможности по оптимизации пусковых характеристик и повышению быстродействия роботов.
_dashcam_2K_4K_(AI_assist_dop).jpg)
Цели и задачи исследования динамики мобильных роботов
Основной целью исследования является повышение эффективности движения мобильного робота за счет разработки методов расчета и оптимизации неустановившихся режимов. Для достижения этой цели были поставлены следующие задачи:
- Разработка математических моделей движения робота при пуске по различным траекториям
- Исследование динамики робота при различных стратегиях управления пуском
- Разработка системы форсированного управления для быстрого разгона робота
- Учет нелинейных эффектов (проскальзывание, отрыв колес) в модели движения
- Синтез регулятора для точного движения по заданной траектории
- Создание экспериментального образца робота для проверки теоретических результатов
Математическая модель движения мобильного робота
Разработана математическая модель движения трехколесного робота с двумя ведущими колесами по прямолинейной и криволинейной траекториям. Модель учитывает:
- Кинематику и динамику робота как системы твердых тел
- Взаимодействие колес с опорной поверхностью (нормальные реакции, силы и моменты трения)
- Динамику электропривода ограниченной мощности
- Возможность проскальзывания и отрыва колес
- Упруго-вязкие элементы в подвеске
Система дифференциальных уравнений, описывающая движение робота, имеет вид:
 «`latex
\begin{cases}
m\ddot{x} + f_x = 0 \\
m\ddot{y} + f_y = 0 \\
J\ddot{\varphi} + M_z = 0 \\
L\dot{i} + Ri + c_e\dot{\varphi} = u(t)
\end{cases}
«`
«`latex
\begin{cases}
m\ddot{x} + f_x = 0 \\
m\ddot{y} + f_y = 0 \\
J\ddot{\varphi} + M_z = 0 \\
L\dot{i} + Ri + c_e\dot{\varphi} = u(t)
\end{cases}
«`
Здесь m — масса робота, J — момент инерции, f_x, f_y — проекции сил, M_z — момент сил, L, R — параметры электродвигателя, u(t) — управляющее напряжение.
Стратегии управления пуском мобильного робота
Исследованы различные стратегии управления пуском робота:
- Плавный разгон с постоянным ускорением
- Ступенчатое изменение управляющего напряжения
- Форсированный пуск с кратковременным повышением напряжения
Установлено, что форсированный пуск позволяет сократить время разгона в 3-4 раза по сравнению с плавным разгоном. На рисунке показаны графики скорости робота при различных стратегиях управления:
«` «`Оптимизация параметров системы управления
Проведена оптимизация параметров системы управления для обеспечения быстрого разгона при соблюдении ограничений по проскальзыванию колес. Получены зависимости времени пуска от параметров управляющего напряжения.

Основные результаты оптимизации:
- Определена оптимальная длительность форсированного режима
- Найдено максимально допустимое напряжение форсировки
- Рассчитаны коэффициенты ПИД-регулятора для точного движения по траектории
Применение оптимизированной системы управления позволило сократить время разгона робота до заданной скорости на 70% при сохранении точности движения.
Учет нелинейных эффектов в модели робота
Для повышения адекватности математической модели в нее были включены следующие нелинейные эффекты:
- Проскальзывание колес при превышении силы трения
- Отрыв колеса от поверхности при больших ускорениях
- Упруго-вязкие элементы в подвеске робота
Учет этих эффектов позволил более точно описать динамику робота в экстремальных режимах движения. В частности, удалось определить предельные ускорения, при которых сохраняется устойчивое движение без проскальзывания и отрыва колес.
Экспериментальные исследования
Для проверки теоретических результатов был разработан экспериментальный образец мобильного робота. Основные характеристики робота:
- Масса — 5 кг
- Диаметр колес — 100 мм
- Мощность двигателей — 100 Вт
- Максимальная скорость — 2 м/с
- Система навигации на основе инфракрасных датчиков
Проведены эксперименты по движению робота по различным траекториям. Сравнение экспериментальных данных с результатами моделирования показало хорошее совпадение (отклонение не более 10%).
Основные результаты и выводы
В результате проведенного исследования получены следующие основные результаты:
- Разработана уточненная математическая модель движения мобильного робота, учитывающая нелинейные эффекты
- Предложена стратегия форсированного управления, сокращающая время разгона в 3-4 раза
- Синтезирован регулятор, обеспечивающий движение по траектории с погрешностью до 5%
- Создан экспериментальный образец робота для проверки теоретических результатов
Полученные результаты могут быть использованы при проектировании мобильных роботов различного назначения для повышения их динамических характеристик и точности движения.
Динамики 15гдш-3 | Festima.Ru — Мониторинг объявлений
Электроника
Таблица Список Лента
Продам динамики 15гдш-3,8Ом,200р за 1шт.,покупал в Чип и Дип за550шт.,ставил в Веги заместо с.ч. звена,поставил другие,состояние отличное.
Мы нашли это объявление 3 года назад
Нажмите Следить и система автоматически будет уведомлять Вас о новых предложениях со всех досок объявлений
Перейти к объявлению
Тип жалобы ДругоеНарушение авторских правЗапрещенная информацияОбъявление неактульноПорнографияСпам
Комментарий
Показать оригинал
Адрес (Кликните по адресу для показа карты)
городской округ Город Владимир, Октябрьский районЕще объявления
Продам б/у динамики разные. Состояние у всех разное, есть с повреждениями диффузоров, но все рабочие. По цене — спрашивайте. Договоримся.
Аудио и видео техника
2 года назад Источник
Внимание! Festima.Ru является поисковиком по объявлениям с популярных площадок. Мы не производим реализацию товара, не храним изображения и персональные данные. Все изображения принадлежат их авторам Отказ от ответственности
Динамики 15гдш-3 8ом .как новые.300р пара
Аудио и видео техника
год назад Источник
Продаю широкополосные динамики 15ГДШ-3 (4шт) 1 шт. — 500р. за пару — 800р. все 4 шт. — 1500р.
Аудио и видео техника
Динамики 15гдш -3-8 новые в заводской упаковке. Продаю только парой. Есть 2 пары. Без торга.
Аудио и видео техника
5 месяцев назад Источник
Продаётся динамик — дефектов нет.
Аудио и видео техника
27 дней назад Источник
Широкополосные динамики 15ГДШ-3 4шт и 6ГДШ-5 1шт. Цена 500 р/шт.
Аудио и видео техника
3 месяца назад Источник
Куплен месяц назад на разовое использование, абсолютно новый динамик
Аудио и видео техника
год назад Источник
Технические параметры Мощность, Вт 15 Номинальное электрическое сопротивление, Ом 4 Уровень чувствительности, Дб 90 Диапазон частот, Гц 125…10000 Габаритные размеры, мм 130x130x58 Вес, г 500 новый!
Аудио и видео техника
Пермь, Цимлянская улица, 172 года назад Источник
Технические параметры Мощность, Вт 15 Номинальное электрическое сопротивление, Ом 4 Уровень чувствительности, Дб 90 Диапазон частот, Гц 125…10000 Габаритные размеры, мм 130x130x58 Вес, г 500 новый!
Аудио и видео техника
Пермский край, Пермь, Цимлянская ул. , 17
, 17 2 года назад Источник
Технические параметры Мощность, Вт 15 Номинальное электрическое сопротивление, Ом 4 Уровень чувствительности, Дб 90 Диапазон частот, Гц 125…10000 Габаритные размеры, мм 130x130x58 Вес, г 500 новый!
Аудио и видео техника
2 года назад Источник
Новые! Стоимость за штуку!
Аудио и видео техника
2 года назад Источник
Новые! Стоимость за штуку!
Аудио и видео техника
Пермский край, Пермь, Городская эспланада2 года назад Источник
Продаю отличные колонки в хорошем состоянии каждые по 30000.Грили для ямах есть без затяжек. На кливерах убрана схема защиты, сч динамики поменяны на 15гдш-3-8 они звучат приятней, родные сч отдам впридачу
Аудио и видео техника
Нижегородская область, Нижний Новгород, Сормовский район2 года назад Источник
Продаю отличные колонки в хорошем состоянии каждые по 30000. Грили для ямах есть без затяжек. На кливерах убрана схема защиты, сч динамики поменяны на 15гдш-3-8 они звучат приятней, родные сч отдам впридачу
Грили для ямах есть без затяжек. На кливерах убрана схема защиты, сч динамики поменяны на 15гдш-3-8 они звучат приятней, родные сч отдам впридачу
Аудио и видео техника
2 года назад Источник
4 штуки 6гдш новые и немного б.у на одном есть небольшой порез. 1 штука 15 гдш новый цена за все 5 динамиков. вышлю в регионы.
Аудио и видео техника
год назад Источник
Амфитон 50ас-022 полностью заменены все динамики на абсолютно новые: НЧ 75ГДН-1-4 ; СЧ 15ГДШ-3-4; ВЧ 10ГД-35 Изменена схема фильтров. Доработана и конструктивно изменена передняя панель.
Аудио и видео техника
Пермский край, Пермь, Социалистическая ул., 24А2 года назад Источник
Динамик 15ГД-14 он же 25ГДН-3-4 от аккустической системы, 4 Ома. Бу, в хорошем состоянии 500. СЧ 15ГД-11А 8 Ом бу 1000. ВЧ НОЭМА 15ГДВ-95 16 Ом новые 2019гв за пару 4000. Подойдут для замены 6ГДВ-6 и 10ГДВ в Radiotechnika S-90, 35АС и аналогичных. Вышлю ТК Боксберри, СДЭК, Авито и подобные.
Подойдут для замены 6ГДВ-6 и 10ГДВ в Radiotechnika S-90, 35АС и аналогичных. Вышлю ТК Боксберри, СДЭК, Авито и подобные.
Аудио и видео техника
2 года назад Источник
Амфитон 50ас-022 полностью заменены все динамики на абсолютно новые: НЧ 75ГДН-1-4 ; СЧ 15ГДШ-3-4; ВЧ 10ГД-35 Изменена схема фильтров. Доработана и конструктивно изменена передняя панель.
Аудио и видео техника
2 года назад Источник
Амфитон 50ас-022 полностью заменены все динамики на абсолютно новые: НЧ 75ГДН-1-4 ; СЧ 15ГДШ-3-4; ВЧ 10ГД-35 Изменена схема фильтров. Доработана и конструктивно изменена передняя панель.
Аудио и видео техника
Пермь, Социалистическая улица, 24А2 года назад Источник
Динамик 15ГД-14 он же 25ГДН-3-4 от аккустической системы, 4 Ома. Бу, в хорошем состоянии 500. СЧ 15ГД-11А 8 Ом бу 1000. ВЧ НОЭМА 15ГДВ-95 16 Ом новые 2019гв за пару 4000. Подойдут для замены 6ГДВ-6 и 10ГДВ в Radiotechnika S-90, 35АС и аналогичных. Вышлю ТК Боксберри, СДЭК, Авито и подобные.
ВЧ НОЭМА 15ГДВ-95 16 Ом новые 2019гв за пару 4000. Подойдут для замены 6ГДВ-6 и 10ГДВ в Radiotechnika S-90, 35АС и аналогичных. Вышлю ТК Боксберри, СДЭК, Авито и подобные.
Аудио и видео техника
Москва, Зеленоград, к16252 года назад Источник
Войти
Все сервисы становятся доступными без ограничений
Сможете пользоваться сервисом Festima.Ru на разных устройствах.
Это удобно и бесплатно
Други помогите советом что сделать с KRK Rokit?
Gzom
Электронный Мутант
- #1
Значит так: Остались у меня со старых времён первые KRK Rokit
(пассивные, не люблю активные мониторы) Кто помнит? — Такие треугольные. ..
..
Хорошие моники были, а почему были? Уранил я когда то один монитор в итоги у большого динамика отвалилась задняя часть (сделать нельзя)
Помогите совет: Можно ли подобрать у нас в Москве достойные динамики что бы поменять штатные?
З.Ы. Только что бы они не стоили дороже мониторов.. )
Испанский ГалстоГ
▬▬▬▬▬▬▬▬
- #2
Во первых почему так категорично сделать нельзя? Не бывает ничего невозможного
Во вторых купив любые другие динамики вам стоит подумать — кто будет разрабатывать и делать новые разделительные фильтры? (иначе это будет уже не монитор, а нечто с непредсказуемой ФЧХ, АЧХ)
Имхо надо старый починить, или купить такой же может б\у . МОжет колонку с сломаным корпусом и пищалкой но работающим низкочастотником поискать
МОжет колонку с сломаным корпусом и пищалкой но работающим низкочастотником поискать
Последнее редактирование:
KRIPTONIG
Well-Known Member
- #3
Gzom подобрать то можно, нужно только параметры снять с рабочего динамика, ну как минимум его фотку спереду, сзаду и сбоку, может прям такие же можно найти, если они тогда были не собственного производства, а какого нибудь стороннего.
Gzom
Электронный Мутант
- #4
Испанский ГалстоГ
Да ясно дело что сводить на них не собираюсь.
Характеристики есть. Можно подобрать
Магнит отвалился. Я пробовал делать — всё вроде держится,
но динамик искажает саунд.
KRIPTONIG,
Да всё есть. Вопрос где и не дорого?
Есть три варианта:
1.Царицыно?
2.Чип-Дип?
3.Самоделка http://www.samodelka.ru но там не всё есть.
KRIPTONIG
Well-Known Member
- #5
Gzom написал(а):
1.
Царицыно?
2.Чип-Дип?Нажмите для раскрытия…
там нет динамиков вменяемых), чтобы не городить огород нужно найти такой же динамик, потому как под готовый корпус подобрать иной динамик очень сложно.
Gzom
Электронный Мутант
- #6
KRIPTONIG написал(а):
там нет динамиков вменяемых), чтобы не городить огород нужно найти такой же динамик, потому как под готовый корпус подобрать иной динамик очень сложно.
Нажмите для раскрытия…

Ну где в нашем то огороде найти такой же? Эти мониторы уже лет пять не выпускают. А опыта покупки через ебэй у меня нету.
Вот что по нему нашел:
У них:
Features:
One-inch silk dome tweeter
Six-inch long-stroke polyvinyl woofer
Maximum power handling: 75 watts
Frequency response: 69Hz-24kHz
10-1/2″ W x 12-1/2″H x 8″D
15 lbs each
И у нас:
Двухполосные студийные мониторы KRK RoKit (450$ за пару) содержат низкочастотный (6,5″) и высокочастотный (1″) динамики. Мощность 75 Вт, частотный диапазон 69 Гц — 24 кГц (+/-3 дБ). Частота кроссовера 1,5 кГц. Чувствительность 91 дБ, максимальное звуковое давление 104 дБ, сопротивление 8 Ом.
На «самоделки» нашел похожие по характеристикам, но цены я вам скажу… от 4500 за динамик, а надо 2.
За такие деньги можно не плохие HI-FI мониторы купить..(
Последнее редактирование:
Kubik
Active Member
- #7
вот чего нарыл http://www. thomann.de/gb/krk_ersatzasslautsprecher_6.htm?sid=373959cba77488935401ae47531ca7f9
thomann.de/gb/krk_ersatzasslautsprecher_6.htm?sid=373959cba77488935401ae47531ca7f9
у меня тоже krk v6 первой версии лежат без дела, по причине сгоревшего усилителя, так вот схему для встроенного усиля найти не могу, чтобы его починить….Уже посещают мысли может собрать пассивный фильтр.
А динамаки НЧ кстати у нас одинаковые ) Кто нибудь знает кто их производит?На самом динамике написано что делает их крк.
KRIPTONIG, расскажите пожалуйста о технологии снятия параметров с динамика?
Последнее редактирование:
KRIPTONIG
Well-Known Member
- #8
Kubik написал(а):
вот чего нарыл http://www.
thomann.de/gb/krk_ersatzasslautsprecher_6.htm?sid=373959cba77488935401ae47531ca7f9
Нажмите для раскрытия…
поздравляю вас рубято))
Kubik написал(а):
KRIPTONIG, расскажите пожалуйста о технологии снятия параметров с динамика?
Нажмите для раскрытия…
если честно я в этом не шибко силен, доверяю эти дела профессионалам, но в любом случае инфы полно в сети — http://artmech.com/pavel/sub/sub2.htm
Реакции:
Kubik
IvanbI4
Member
- #9
Gzom написал(а):
Магнит отвалился.
Я пробовал делать — всё вроде держится, но динамик искажает саунд.
Нажмите для раскрытия…
Просто так приладить магнит назад и при этом идеально его отцентровать — не реально.
Возвращение магнита назад это последовательность множества действий.
Сначала надо отклеить диффузор от корзины, затем выточить из не магнитного материала(латунь, дюраль, etc) центрирующую втулку, затем при помощи этой втулки отцентровать и склеить магнитную систему, дать ей просохнуть, и только после этого — центровать и вклеивать на место диффузор.
Вам надо обратиться к спецу по ремонту динамиков и искажения саунда исчезнут.
Gzom
Электронный Мутант
- #10
Так там всё запрессовоно. Не подлезть. (
Не подлезть. (
IvanbI4
Member
- #11
Gzom написал(а):
Так там всё запрессовоно. Не подлезть. (
Нажмите для раскрытия…
Раньше, когда глаз был острее, я этим делом занимался системно, то есть говорю не по наслышке.
Не совсем понятно что значит запрессовоно?
В смысле у широкополосника закрытая корзина?
Конечно всяко может быть, но, как правило, все ответственные места, где нужна особая точность — собираются на клею, то есть возможно и расклеить.
Вы бы всё таки попробовали найти мастера и показали бы ему повреждённую головку. Ремонт головки и по финансовым затратам выйдет гораздо дешевле покупки новой и от гемора по перестройке кроссовера освободит.
Да и потом, хоть обперестраивайся, с инородной головкой всё равно не получится подобранная пара акустики.
Реакции:
GzomGzom
Электронный Мутант
- #12
Господа! Кто сможет в Москве поставить диагноз динамику:?
Можно сделать — нельзя сделать. ?
?
Динамика неустановившихся режимов движения мобильного колесного робота по прямолинейной и криволинейной траекториям
Автореферат диссертациина тему «Динамика неустановившихся режимов движения мобильного колесного робота по прямолинейной и криволинейной траекториям»
На правах рукописи
Аль-Еззи Абдулракеб Сайд Яхья
ДИНАМИКА НЕУСТАНОВИВШИХСЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНОГО КОЛЕСНОГО РОБОТА ПО ПРЯМОЛИНЕЙНОЙ И КРИВОЛИНЕЙНОЙ ТРАЕКТОРИЯМ
01.02.06-Динамика, прочность машин, приборов и аппаратуры
АВТОРЕФЕРАТ
диссертации на соискание ученой степени кандидата технических наук
1 6 ИЮН 2011
Курск 2011
4850148
Работа выполнена на кафедре Теоретической механики и мехатроники государственного образовательного учреждения высшего профессионального образования «Юго-Западный государственный университет», г. Курск
Курск
Научный руководитель заслуженный деятель науки РФ,
доктор технических наук, профессор Яцун Сергей Федорович
Официальные оппоненты: доктор технических наук, профессор
Савин Леонид Алексеевич
кандидат технических наук Сапронов Константин Александрович
Ведущая организация ГОУ ВПО «Воронежский
государственный технический университет»
Защита состоится «29» июня 2011 г. в 12.00 на заседании совета по защите докторских и кандидатских диссертаций Д 212.105.01 при Юго-Западном государственном университете по адресу: г. Курск, ул. 50 лет Октября, 94, конференц-зал.
С диссертацией можно ознакомиться в библиотеке Юго-Западного государственного университета.
Автореферат разослан «27» мая 2011 г.
Ученый секретарь совета по защите докторских и кандидатских диссертаций Д 212.105.01 к.т.н„ доцент
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. В настоящее время в мире интенсивно расширяется область использования мобильных роботов. Для успешного выполнения обширного круга задач роботы должны обладать высокой маневренностью, быстродействием и точностью движения по заданным траекториям. Кроме этого робот должен обладать способностью к интерпретации, планированию и автоматическому выполнению полученных заданий, используя как бортовую, так и внешнюю вычислительные системы.
Для успешного выполнения обширного круга задач роботы должны обладать высокой маневренностью, быстродействием и точностью движения по заданным траекториям. Кроме этого робот должен обладать способностью к интерпретации, планированию и автоматическому выполнению полученных заданий, используя как бортовую, так и внешнюю вычислительные системы.
Область применения колесных мобильных роботов чрезвычайно разнообразна и включает такие важные сферы человеческой деятельности, как автоматизированное производство, строительство, космос, оборона, медицина, сельское хозяйство и т.д. Особенно высокие требования предъявляются к сервисным роботам, выполняющим технологические задачи в условиях взаимодействия с человеком. При этом важно обеспечить возможность достижения заданной цели в неопределенной внешней среде, избегая столкновения со стационарными препятствиями и подвижными объектами.
Активное поведение колесных роботов в сложном окружении достигается при использовании новых кинематических схем, а также развитых систем измерения, очувствления и управления. Исследованию движения колесных роботов посвящены работы многих отечественных исследователей, в том числе В.М. Буданова, Е.А. Девянина, СЛ. Зенкевича, Ю.Г. Мартыненко, Д.Е. Охоцимского, В.Е. Павловского, Ю.В. Подураева, A.M. Формальского, а также и зарубежных ученых: G. Bastin, G. Campion, С. Canudas de Wit, W. Dixon, Y.H. Fung, A. Isidori и др.
Исследованию движения колесных роботов посвящены работы многих отечественных исследователей, в том числе В.М. Буданова, Е.А. Девянина, СЛ. Зенкевича, Ю.Г. Мартыненко, Д.Е. Охоцимского, В.Е. Павловского, Ю.В. Подураева, A.M. Формальского, а также и зарубежных ученых: G. Bastin, G. Campion, С. Canudas de Wit, W. Dixon, Y.H. Fung, A. Isidori и др.
В то же время вопросы быстрого пуска робота, разгона и выхода на заданный уровень скорости изучены недостаточно. Однако именно здесь скрываются резервы повышения быстродействия робота.
Таким образом, актуальность темы исследования определяется необходимостью создания более совершенных систем управления пусковыми режимами колесных роботов, удовлетворяющих современным требованиям к качественным и количественным характеристикам движения и учитывающих нелинейные свойства математических моделей управляемых объектов.
Объектом исследования является колесный мобильный робот с двумя ведущими колесами, оснащенный системой форсированного управляемого пуска.
Целью диссертации является повышение эффективности движения мобильного робота за счёт разработки и создания методов расчёта неустановившихся режимов.
Методы исследования. Для решения поставленных задач использовались различные разделы теоретической механики, теории механизмов и машин, теории автоматического управления, методы математического моделирования динамических систем. При создании программных продуктов использованы математические пакеты MathCAD, Matlab/Simulink.
Для достижения поставленной цели решены следующие задачи:
1. Разработка математической модели движения робота при пуске по прямолинейной и криволинейной траекториям. Моделирование и исследование динамики движения робота при различных стратегиях управления пуском робота.
2. Разработка системы управления движением робота в период пуска и при различных стратегиях управления, обеспечивающих быстрый разгон робота.
3. Разработка математической модели движения мобильного колесного робота по прямолинейной траектории с учетом упруговязкого элемента в подвеске и трения качения и скольжения. Определение условий равновесия робота в процессе пуска. Выявление закономерностей, определяющих разгон робота для различных законов управления.
Определение условий равновесия робота в процессе пуска. Выявление закономерностей, определяющих разгон робота для различных законов управления.
4. Моделирование системы управления движением робота по различным траекториям.
5. Синтез регулятора, использование которого может обеспечить управление движением по траектории с заданной точностью.
6. Разработка конструкции экспериментального мобильного колесного робота для реализации алгоритмов управления движением.
7. Разработка системы навигации для решения задачи управления движением робота по заданной траектории.
Достоверность научных положений и результатов. Основные научные результаты диссертации получены на основе математического аппарата неголономной механики, теории автоматического управления, а также методов экспериментальных исследований. Результаты экспериментальных исследований согласуются с теоретическими результатами.
Научная новизна работы заключается в совершенствовании математических моделей, описывающих динамику управляемого движения робота при пуске по прямолинейной и криволинейной траекториям и с учетом упруговязкого элемента в подвеске, выявлении параметров движения робота, соответствующих различным его режимам: с проскальзыванием и без проскальзывания ведущих колес, с отрывом и без отрыва ведущего колеса от плоскости опоры.
Основные положения, выносимые на защиту:
1. Математическая модель движения робота при пуске по прямолинейной и криволинейной траекториям, отличающаяся тем, что учтены трение качения и трение скольжения и используется электропривод ограниченной мощности.
2. Зависимость времени пуска от закона управляющего напряжения в системе управления движением робота в период пуска и предложена стратегия форсированного управления, обеспечивающая быстрый разгон робота, что повышает быстродействие в 3,5 раза по сравнению с традиционным пуском.
3. Зависимости скорости разгона робота от параметров управляющего напряжения, позволившие синтезировать регулятор, использование которого обеспечивает управление движением по траектории с погрешностью до 5%.
4. Математическая модель движения мобильного робота с учетом уп-руговязкого элемента в подвеске, позволяющая установить, что с уменьшением жесткости упругого элемента время переходного процесса возрастает.
Практическая ценность работы состоит в разработке экспериментального образца, оснащенного системой навигации и планирования траектории на основе инфракрасного локатора, для решения задачи управления движением робота по заданной траектории. Этот робот спроектирован на основе методики расчета пусковых режимов предложенных в работе. Этот образец может быть использован для проведения экспериментальных исследований в рамках решения задач мехатроники. Созданные методики расчета роботов могут применяться при проектировании сервисных роботов, роботов по борьбой с чрезвычайными ситуациями, а также может применяться в учебном процессе.
Апробация работы. Основные результаты работы докладывались и обсуждались на вузовской научной конференции студентов и аспирантов в области научных исследований «Молодежь и XXI век» (г. Курск, 2009), IV Международной научно-технической конференции «Вибрация-2010» (г. Курск, 2010), V научно-технической конференции аспирантов и молодых ученых (г. Ковров, 2010), II Международной молодёжной научной конференции «молодёжь и XXI век»(г. Курск, 2010), Всероссийской научной школе для молодежи «Мехатроника, робототехника. Современное состояние и тенденции развития» (г. Курск, 2011), Всероссийской научно-технической конференции Новые технологии в научных исследованиях, проектировании, управлении, производстве (г. Курск, 2011).
Ковров, 2010), II Международной молодёжной научной конференции «молодёжь и XXI век»(г. Курск, 2010), Всероссийской научной школе для молодежи «Мехатроника, робототехника. Современное состояние и тенденции развития» (г. Курск, 2011), Всероссийской научно-технической конференции Новые технологии в научных исследованиях, проектировании, управлении, производстве (г. Курск, 2011).
Публикации. По теме диссертационной работы опубликовано 17 научных работ в том числе: 15 статей (из них 3 статьи в изданиях, рекомендованных перечнем ВАК РФ), 1 свидетельство о государственной регистрации программы для ЭВМ и 1 патент на полезную модель.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения, списка использованной литературы (103 наименования). Текст диссертации изложен на 158 страницах машинописного текста, включает 118 рисунков, 1 таблицу.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы диссертации, сформулированы цель и задачи диссертации, показана новизна и практическая значимость полученных результатов.
В первой главе рассмотрены различные типы роботов, приведена структура исполнительных систем мобильных роботов, проведен анализ существующих моделей колесных модулей мобильных роботов.
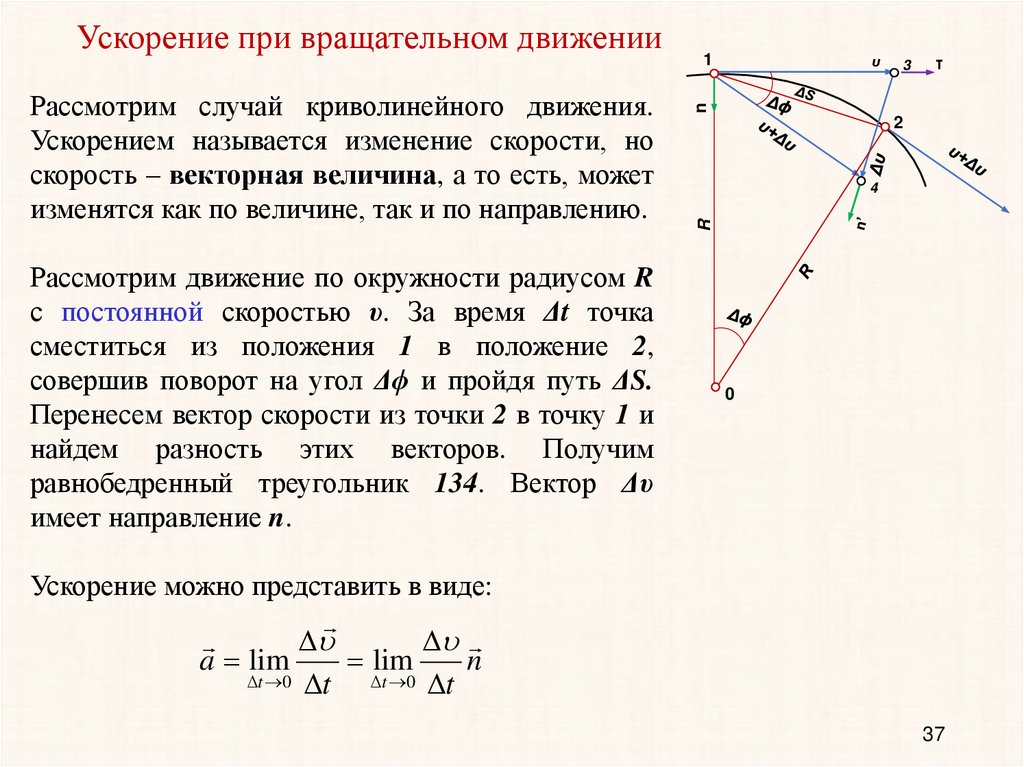
Во второй главе разработана математическая модель движения трёхколёсного робота по прямолинейной траектории с двумя ведущими колесами. Расчетная схема робота показана на рис.1. Рассматриваемый в работе робот, движется в неподвижной системе координат Охуг, причем предполагается, что робот находится все время в вертикальной плоскости Оху с координатой г=0.
Робот состоит из ведущего колеса 1, установленного на валу управляемого электродвигателя постоянного тока, который неподвижно закреплен на корпусе робота 2, и поддерживающего рояльного колеса 3. В дальнейшем принято, что элементы робота — недеформируемые твердые тела, а при взаимодействии ведущего колеса с шероховатой поверхностью возникают нормальная реакция, сила трения и момент трения качения. На рояльное колесо действует только нормальная реакция. шд — — (т2д12 — ¿с1е)|;
шд — — (т2д12 — ¿с1е)|;
У01Ф1 = (т2д12 — ¿с1е) б + ¿с1е + / — (т2д12 — ¿с1е)| г; (2)
«И
¿ —+Ю + сшф1 = 1/(0.
В соответствии с законом Кулона, условием перехода к движению робота с проскальзыванием колеса является = ЕЦ) = /Л/г. При отсутствии скольжения, то есть при К= О, — тгфг. Если = , то переходим к уравнениям (2).
Рассчитываем функции Х1(0, (р)(0 и ¡(0 в соответствии с системой уравнений (2), при этом на каждом временном шаге контролируем ¿(Е) и ф(£). Если = ф(£), процесс скольжения прекращается и мгновенный центр скоростей перемещается в точку контакта колеса с поверхностью.
Рассмотрим различные способы управления в пусковом режиме. На рис. 2 приведен график зависимости напряжения питания, поступающего на обмотки якоря электродвигателя. Далее рассматривается кусочно-постоянный 2-этапный алгоритм управления.
« » ► гч 1, с
Рис. 2. Зависимость управляющего напряжения от времени
Данный алгоритм характеризуется 4-мя параметрами: (/;, II:, ¡2, изменение которых влияет на разгон робота.
Далее приведены примеры вычисления основных параметров робота в зависимости от времени. На первом этапе рассматривается традиционный пуск робота при постоянном управляющем напряжении, равном 12 В (рис.3.,а). Время выхода на заданную угловую скорость 40 р/с составляет 12 с, а ток в цепи якоря не превышает 3,8 А (рис.3,в).
Для уменьшения времени разгона применим двухэтапный алгоритм кусочно-постоянного напряжения, приведенный на рис.4.
На первом этапе на обмотки якоря поступает напряжение 15 В. Далее, на втором этапе напряжение в течение 2 с увеличивается до ЗОВ, а потом остается постоянным на уровне 12 В. Анализируя график, приведенный на рис. 4,6 видим, что время пуска равно 3,5 с, а уровень тока не превышает 8,5 А.
Анализ полученных результатов показал, что форма управляющего напряжения существенно влияет на характер изменения угловой скорости ведущего колеса и скорости корпуса робота. Выбирая рациональный закон управления, удается снизить время пуска приблизительно в 3,5 раза, по сравнению с пуском при постоянном напряжении.
0 5 Ю 15 20
Рис.4. Зависимости управляющего кусочно-постоянного напряжения (а), угловой скорости вращения ведущего колеса (б) и тока в цепи якоря электродвигателя (в), от времени Для обеспечения гарантированной заданной скорости как в пусковых, так и установившихся режимах предлагается оснастить робот системой управления с обратной связью (рис.5).
Система работает следующим образом. Для пуска робота использован двухэтапный алгоритм управления напряжением. При подаче управляющего напряжения и, которое зависит от отклонения реальной скорости от заданной, происходит корректировка угловой скорости ведущего колеса. При этом на этапе разгона, то есть при сй<®зад, реализуется двухэтапный алгоритм подачи управляющего напряжения.
Рис.5. Схема робота с системой управления, оснащенной обратной связью
/ …../ ……………………….
/ /
/………………………………
& 0,002 с
Рис. ,то (У =2С/„0М (12 В). В противном случае, при со>шзад, II =ином.
,то (У =2С/„0М (12 В). В противном случае, при со>шзад, II =ином.
После того как робот достигает заданной угловой скорости система управления осуществляет стабилизацию этого значения с ошибкой не более 0,01. Далее приведены диаграммы, иллюстрирующие пуск робота с автоматической системой управления (рис.6).
В третьей главе разработана математическая модель, описывающая движение колесного робота, оснащенного упруговязким элементом в подвеске. При перемещении робота по неровным поверхностям необходимо обеспечить демпфирование колебаний корпуса робота. Для этого корпус робота должен быть связан с ведущими колесами с помощью упруговязкого элемента. Схема такого робота представлена на рис. 7. Робот состоит из корпуса 0)Е заданного геометрического размера, рычага ОБ, шарнирно установленного на корпусе и связанного с ним упруговязким элементом, и ведущего колеса О. Все элементы робота совершают плоскопараллельное движение без отрыва от поверхности. Ведущие колеса двигаются без проскальзывания. Масса рычага ОБ равна нулю.
Масса рычага ОБ равна нулю.
Для описания движения робота обобщенными координатами являются Ф1 иср2.
Величины деформации
А= _
= т/С-сэшфг + ecosp)2 + fa + азн1ф2 +(Ь + с) cas(p2 — г — \0D — е\ sin р)2
-У(-с)2 + fa + а — г)2 =__
т]с2 sin2 ф2 — 2cesin<p2 cosp + e2cos2 р + (а + Psin(<p2 + О +у)2 — фг -ri + OD sin р — (а — d) sin ф2 — b cos ф2 = 0, (3)
(а — d) sin ф2 + Ь cos <р2 — г + rt (4) =-Ш-•
Анализ формул (3) и (4) показывает, что деформация пружины Д зависит от угла поворота корпуса робота ф2: Д= Д(ф2).
Уравнения, позволяющие найти нормальную реакцию N2 и силу упругости Р23, имеют вид:
Ргз =N2- т2д — i [W2(c + b) — m2g(c + b- bj]; Ni = (m2 + mjg — %
1
N2=-
c + b)
e + ei
Мэд + —-—m2g(c + b-bx)+ m2ge1
Для построения математической модели робота с учетом упруго элемента использованы уравнения Лагранжа 2-го рода. ! — (т! + т2)я 12 В главе также установлены закономерности движения с учетом свойств упруговязкого элемента, установленного в подвеске робота. Получены зависимости изменения скорости робота для различных параметров упруговязкого подвеса.
! — (т! + т2)я 12 В главе также установлены закономерности движения с учетом свойств упруговязкого элемента, установленного в подвеске робота. Получены зависимости изменения скорости робота для различных параметров упруговязкого подвеса.
Зависимости углового ускорения, скорости и угла поворота ведущего колеса и корпуса робота от времени приведены на рисунках 8,9. а) б)
Рис.8. Зависимости углового ускорения (а,б), скорости (в,г), и угла поворота (д,е) ведущего колеса и корпуса робота соответственно от времени при использовании
с = 50 Н/М
а) б)
Рис.9. Зависимости углового ускорения (а,б), скорости (в,г), и угла поворота (д,е) ведущего колеса и корпуса робота соответственно от времени при использовании с = 500 Н/М
Анализ зависимостей угловых ускорений, скоростей и углов поворота ведущего колеса и корпуса робота показал, что с ростом жесткости упругого элемента возрастает частота колебаний корпуса, а время этих колебаний уменьшается
В четвертой главе построена математическая модель, описывающая поведение мобильного колесного робота с двумя ведущими колесами, рассмотрены принципы организации движения по программной траектории.
Общий вид прототипа мобильного робота с двумя независимыми ведущими колесами и общий вид прототипа робота с упруго вязким элементом в подвеске показаны на рисунке 10. Этот робот спроектирован на основе методики расчета пусковых режимов предложенных в работе. Результаты экспериментальных исследований подтверждают теорию того что, стратегия форсированного управления, обеспечивающая быстрый разгон робота, повышает быстродействие в 3,5 раза по сравнению с традиционным пуском, а также подтверждает тот факт что, жесткость упруговязкого элемента в подвеске, существенно изменяет время переходного процесса увеличивая его с уменьшением жесткости.
Рис. 10 Общий вид прототипа мобильного робота с двумя независимыми ведущими колесами (а), общий вид прототипа робота с упруговязким элементом в подвеске (б): 1-ИК локатор, 2- упруговязкий элемент, 3-ЭД, 4-корпус, 5-ведушие колеса, 6-рычаг
Было смоделировано и исследовано движение робота по сложной криволинейной траектории. Рассмотрим движение робота М по траектории, представляющей собой кривую, состоящую их двух четвертей окружности; причем точка М движется по этой.
Рассмотрим движение робота М по траектории, представляющей собой кривую, состоящую их двух четвертей окружности; причем точка М движется по этой.
Результаты моделирования при различных начальных значениях курсового угла приведены на рис. 11, радиус четвертей окружности, из которых состоит траектория, Я=0,5 м.
Из графиков видно, что на первой половине траектории характер поведения системы различен, это объясняется наличием начального угла поворота в ориентации робота относительно неподвижной системы координат ХОУ.
На второй половине траектории характер движения робота не зависит от начального угла поворота относительно неподвижной системы координат.
Графики напряжений, которые необходимо подать на двигатели робота, для обеспечения движения по заданной траектории представлены на рис. 12.
Анализируя полученные графики, можно сделать вывод, что для робота с указанными параметрами можно реализовать заданное программное движение с высокой точностью до 95%.
а) б)
П, рад/сек
Л.сек
‘/V \ 4
/ у-……………….
Рис. 11. Зависимости курсового угла (а), угловой скорости (б) и линейной скорости робота (в) от времени при различных начальных условиях: 1 — \|/0=0°, 2 — уо=10°,
3-ч/0=45°, 4-\|/0=-25°
IV, в
-А
б)
Рис. 12. Зависимости напряжения на левом(а), и на правом двигателе(а), от времени при различных начальных условиях: 1 — *|/о=0°, 2 — ч/о=10°, 3 — уо=45°,4 — ц/о=-25°
ОСНОВНЫЕ ВЫВОДЫ И РЕЗУЛЬТАТЫ РАБОТЫ
В диссертации предложено решение актуальной задачи повышения эффективности движения мобильного робота, оснащенного системой управляемого пуска, за счёт разработки и создания методов расчёта неустановившихся режимов. Проведенные исследования позволили получить следующие результаты:
1. Разработана математическая модель движения мобильного колесного робота по прямолинейной траектории с учетом трения качения и сколь-
жения. Сформулированы условия пуска и проскальзывания ведущего колеса. Выявлены закономерности, определяющие разгон робота для различных законов управления, установлено, что импульсное форсированное управление при пуске повышает быстродействие (в 3,5 раза).
Сформулированы условия пуска и проскальзывания ведущего колеса. Выявлены закономерности, определяющие разгон робота для различных законов управления, установлено, что импульсное форсированное управление при пуске повышает быстродействие (в 3,5 раза).
2. Разработана математическая модель движения мобильного колесного робота по прямолинейной траектории с учетом упруговязкого элемента в подвеске и трения качения и скольжения с использованием уравнения Ла-гранжа 2-го рода. Выявлены закономерности, определяющие разгон робота при различных значениях жесткости упругого элемента. Установлено, что увеличение жесткости снижает время колебательного процесса робота.
3. Разработана математическая модель движения мобильного колесного робота по криволинейной траектории для различных управляющих параметров, рассматриваемая как неголономная система, в основе которой используются уравнения Маджи. В состав модели входят механическая, электрическая и управляющая подсистемы. Предложены различные стратегии форсированного управления при повороте.
4. Методом численного моделирования исследована динамика движения колесного мобильного робота по S-образной траектории; выявлены параметры системы, обеспечивающие максимально точное прохождение заданной траектории при различных начальных условиях.
5. Разработана система управления движением по заданной траектории и проведено компьютерное моделирование движения мобильного колесного робота по типовым траекториям. Предложена методика определения отклонения от заданной траектории.
6. С учетом результатов моделирования разработана конструкция колесного мобильного робота с двумя ведущими колесами, отличающегося тем, что блок питании позволяет кратковременно создавать напряжение питания, превышающее номинальное в три раза.
7. Рассчитаны необходимые конструктивные параметры. Построена система управления, позволяющая осуществлять движение робота как в режиме пуска и разгона, так и по траектории, определяемой системой локальной навигации на базе инфракрасного локатора.
Основное содержание диссертации изложено в следующих работах: Публикации в изданиях, рекомендованных ВАК РФ
1. Аль-Бззи, A.C. Исследование пусковых режимов движения колесного транспортного агрегата [Текст] / A.C. Аль-Еззи, A.C. Яцун, И.М. Ахма-дулин // Вестн. Курск, гос. С.-х. акад. — Курск,2011. № 2. — С. 78-80.
2. Аль-Еззи, A.C. Мобильный робот с двумя ведущими колесами и управлением по инфракрасному маяку [Текст] / A.C. Аль-Еззи, С.Ф. Яцун // Изв. ЮЗГУ. — Курск, 2011.-№3. — С. 115-127.
3. Бартенев, В.В. Математическая модель движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной шероховатой
плоскости [Текст] / B.B. Бартенев, С.Ф. Яцун, A.C. Аль-Еззи // Изв. Самар. науч. центра РАН. -2011. — №4 — С. 68-74.
Статьи, материалы конференций;
4. Аль-Еззи, A.C. Анализ методов и способов движения мобильных роботов [Текст] / A.C. Аль-Еззи, С.И. Савин //Молодёжь и XXI век: материалы I Междунар. молодёжной науч. конференции. — Курск, 2009. — 4.3. -С. 34-37.
молодёжной науч. конференции. — Курск, 2009. — 4.3. -С. 34-37.
5. Савин, С.И. Проектирование конструкции мобильного робота, оснащенного системой технического зрения [Текст] / С.И. Савин, A.C. Аль-Еззи // Современные инструментальные системы, информационные технологии и инновации: материалы VII Междунар. Науч.-техн. конф. — Курск, 2010.-С. 165-169.
6. Савин, С.И. Конструкция и система автоматического управления мобильного робота, оснащенного системой технического зрения [Текст] / С.И. Савин, A.C. Аль-Еззи // управляемые вибрационные технологии и машины: сб. науч. ст. Курск, гос. техн. ун-т. — Курск, 2010. — Т.2 — С. 258-161.
7. Савин, С.И. Мобильный робот, оснащенный системой ориентации, основанной на использовании видеосенсора [Текст] / С.И. Савин, A.C. Аль-Еззи // Вооружение, технология, безопасность, управление: материалы V науч.-техн. конф. аспирантов и молодых ученых: в 6 ч. — Ковров, 2010. — ч. 1.-С. 38-46.
8. Савин, С.И. Моделирование движения мобильного колёсного робога [Текст] /С. И. Савин, A.C. Аль-Еззи // Молодёжь и XXI век: материалы II Междунар. молодёжной науч. конф.: в 3 ч. — Курск, 2010 — ч.1. — С. 196-200.
И. Савин, A.C. Аль-Еззи // Молодёжь и XXI век: материалы II Междунар. молодёжной науч. конф.: в 3 ч. — Курск, 2010 — ч.1. — С. 196-200.
9. Савин, С.И. Методы распознавания препятствий мобильного робота, оснащенного системой технического зрения [Текст] / С.И. Савин, A.C. Аль-Еззи, И.А. Томакова // Молодёжь и XXI век: материалы II Междунар. молодёжной науч. конф.: в 3 ч. — Курск, 2010. -ч.1. — С. 200-204.
10. Савин, С.И. Система автоматического управления мобильного колёсного робота [Текст] / С.И. Савин, A.C. Аль-Еззи // Применение инновационных технологий в научных исследованиях: материалы Междунар. На-уч.-практи. конф. — Курск, 2010. — С. 280-284.
11. Савин, С.И. Программное обеспечение мобильного робота [Текст] / С.И. Савин, A.C. Аль-Еззи, С.Ф. Яцун // В мире научных открытий. — 2010. №4 (10), Ч. 7. С.142-144
12. Бартенев, В.В. Динамика управляемого движения мобильного робота с двумя независимыми ведущими колесами [Текст] / В.В. Бартенев, A.C. Аль-Еззи, С.Ф. Яцун // Мехатроника, робототехника: Современное состояние и тенденции развития: Сб. науч. ст. Всерос. науч. школы для молодежи-Курск 2011.-С. 156-178.
Аль-Еззи, С.Ф. Яцун // Мехатроника, робототехника: Современное состояние и тенденции развития: Сб. науч. ст. Всерос. науч. школы для молодежи-Курск 2011.-С. 156-178.
13. Аль-Еззи, A.C. Моделирование управляемого движения робота в повороте колесами [Текст] / A.C. Аль-Еззи // Всерос. Науч. школы для моло-
дежи Мехатроника, робототехника. Современное состояние и тенденции развития: Сб. науч. ст.-Курск 2011. — С. 41-53.
14. Аль-Еззи, A.C. Исследование пусковых режимов колесного мобильного робота [Текст] / A.C. Аль-Еззи // Известия ЮЗГУ. Серия «Техника и технологии» — 2011-№3. — С. 40-49.
15. Пат. на полезную модель №99253 Российская Федерация: МПК H01S 3/00. Мобильный робот с оптронной матрицей [Текст] / Яцун С.Ф., Бартенев В.В., Савин С.И., Аль-Еззи А.; заявитель и патентообладатель ГОУ ВПО «Юго-Западный государственный университет». — №2010124311/28; заявл. 15.06.2010; опубл. 10.11.2010, Бюл. №31.
16. Аль-Еззи, A.C. Исследование и моделирование пусковых режимов колесного мобильного робота [Текст] / A. C. Аль-Еззи // Новые технологии в научных исследованиях, проектировании, управлении, производстве: материалы Всерос. Науч.-техн. конф. — Воронеж, 2011. — С. 119-121.
C. Аль-Еззи // Новые технологии в научных исследованиях, проектировании, управлении, производстве: материалы Всерос. Науч.-техн. конф. — Воронеж, 2011. — С. 119-121.
17. Свидетельство о государственной регистрации программы для ЭВМ № 2011613404. Управлияющая программа мобильного колесного робота Vision Robot / Савин С.И., Аль-Еззи A.C.; правообладатель ГОУ ВПО «Юго-Западный государственный университет». № 2011611739; заявл. 16.03.2011; зарегистр. 29.04.2011.
Подписано в печать 01.05.2011. Формат 60×84 1/16. Печ. Л. 1,0. Тираж 130 экз. Заказ Юго-Западный государственный университет 305040, г. Курск, ул. 50 лет Октября, 94 Отпечатано в ЮЗГУ.
про динамики в торпеду Volvo 940 — Клуб Вольво
Poland
- Joined
- Jan 29, 2010
- Messages
- 29,497
- Марка машины
- Volvo
- Модель Volvo
- XC90 I P2
- Регион
- Москва
- Имя
- Александр
- #2
abanamat, На сколько помню, (давно было) там что-то изначально с сопротивлением, то ли 6, то ли 8 Ом. Т.е. не родные по 4 Ома пихать нельзя. В задней полке ничего не было запихнуто, но я поменял всё на отечественные, в дверях по крайней мере, вынув динамики из каких-то колонок, типа 15 АС и чегой-то… Сумел упаковать под штатные решётки, путём каких-то вставок…. Но низов всё равно было маловато… Взял активный саб, с внутренним усилителем — и это уже была другая песня. Саб правда ставил через выключатель, ибо он получался всегда запитаным. Всё. Чего и как в деталях не очень помню, но звучало всё это хозяйство знатно….
Т.е. не родные по 4 Ома пихать нельзя. В задней полке ничего не было запихнуто, но я поменял всё на отечественные, в дверях по крайней мере, вынув динамики из каких-то колонок, типа 15 АС и чегой-то… Сумел упаковать под штатные решётки, путём каких-то вставок…. Но низов всё равно было маловато… Взял активный саб, с внутренним усилителем — и это уже была другая песня. Саб правда ставил через выключатель, ибо он получался всегда запитаным. Всё. Чего и как в деталях не очень помню, но звучало всё это хозяйство знатно….
Upvote 0 Downvote
frozen
- Joined
- Nov 26, 2007
- Messages
- 11,107
- Age
- 41
- Марка машины
- Volvo
- #3
abanamat, те нужно или штатные 940 пищалки (они в сборе как раз встают на штатное место, где у тебя просто сетка) — ищи на разборках, от 960/ы90 не подойдут, или бери компонентную акустику с кроссоверами. Проблема вкорячить мидбас в штатные места 940 в дверях: 13 малы, 15 — будут торчать…
Проблема вкорячить мидбас в штатные места 940 в дверях: 13 малы, 15 — будут торчать…
Last edited:
Upvote 0 Downvote
dadsnake
- Joined
- Dec 19, 2005
- Messages
- 16,622
- Age
- 45
- Марка машины
- Volvo
- Модель Volvo
- V70 I P80
- Модель
- 2,5TDi
- Регион
- Калининградская область
- Имя
- Димa
- #4
Надо посмотреть, какой-там размер гнезда и пробовать что-нибудь найти по разным магазинам электроники, вот в Чипе что-то есть http://www. chipdip.ru/catalog/show/…1625=&p.1626=8&p.1627=&p.1628=&p.1629=&sklad=
chipdip.ru/catalog/show/…1625=&p.1626=8&p.1627=&p.1628=&p.1629=&sklad=
Я вкорячил 165 (http://www.hifi-trade.ru/index.php?productID=11241681) — но это конечно колхозинг ещё тот — самому стыдно. Хотя, когда двери закрыты, в глаза особо и не бросается… Вот до сих пор не решил, что болгаркой обработать — кусок динамика или защитную сетку, что бы она лучше прилегала… Сетку жалко портить… Торчит кусок динамика, скорее всего его попробую аккуратно отпилить (отрезать) — как раз по месту, где отпечаток от декоративной сетки… :dum
А 130 будут наверное в самый раз http://www.hifi-trade.ru/index.php?productID=11241680
Last edited:
Upvote 0 Downvote
Sedrik
Постоянный участник сообщества
- Joined
- Dec 7, 2007
- Messages
- 783
- Age
- 40
- Марка машины
- Volvo
- Имя
- Алексей
- #5
dadsnake said:
Я вкорячил 165 — но это конечно колхозинг ещё тот — самому стыдно.
Хотя, когда двери закрыты, в глаза особо и не бросается… Вот до сих пор не решил, что болгаркой обработать — кусок динамика или защитную сетку, что бы она лучше прилегала… Сетку жалко портить… Торчит кусок динамика, скорее всего его попробую аккуратно отпилить (отрезать) — как раз по месту, где отпечаток от декоративной сетки… :dum
Click to expand…
Вот это жеесть!!! Отпилишь — и дин в помойку. Имхо менно по месту предполагаемого реза и приклеен диффузр
Upvote 0 Downvote
dadsnake
- Joined
- Dec 19, 2005
- Messages
- 16,622
- Age
- 45
- Марка машины
- Volvo
- Модель Volvo
- V70 I P80
- Модель
- 2,5TDi
- Регион
- Калининградская область
- Имя
- Димa
- #6
Sedrik said:
Вот это жеесть!!! Отпилишь — и дин в помойку.
Имхо менно по месту предполагаемого реза и приклеен диффузр
Click to expand…
Будет хороший повод поставить 130… :bugoga
Upvote 0 Downvote
abanamat
- Joined
- Apr 17, 2007
- Messages
- 1,045
- Марка машины
- Ford
- Регион
- Санкт-Петербург
- #7
dadsnake, Отец родной! Это Вы мне про двери… Видел я какие-то небольшие коаксиалы Hertz, которые при работе лобзиком по торпеде встанут в район штатного места. .. Что при этом будет с декоративными решётками станет известно не раньше того, как начнёшь их прилаживать на место… При этом шанс, что после такого апгрейда придётся менять все жинамики по кругу, очень велик. Этого хотелось бы избежать. И не только потому, что с отсутствием работы нету денег, а сколько потому, что имеющееся звучание вполне устраивает соотношением «цена/качество»…
.. Что при этом будет с декоративными решётками станет известно не раньше того, как начнёшь их прилаживать на место… При этом шанс, что после такого апгрейда придётся менять все жинамики по кругу, очень велик. Этого хотелось бы избежать. И не только потому, что с отсутствием работы нету денег, а сколько потому, что имеющееся звучание вполне устраивает соотношением «цена/качество»…
А вот за ссылку на «чип и дип» спасибо! Там я не бывал по этому поводу — надо зайти и прогуляться там с решёточкой/держателем из моей торпеды.
Upvote 0 Downvote
dadsnake
- Joined
- Dec 19, 2005
- Messages
- 16,622
- Age
- 45
- Марка машины
- Volvo
- Модель Volvo
- V70 I P80
- Модель
- 2,5TDi
- Регион
- Калининградская область
- Имя
- Димa
- #8
Ну да — про двери! У меня в них стоял какой-то порванный китай. .. В те маленькие решёточки у лобовухи я даже как бы и не пробовал ползать. Но если у тебя в дверях нормальный звук и не хватает только высокочастотного тыц-тыца, то можно попробовать туда замутить что-нибудь :dum
.. В те маленькие решёточки у лобовухи я даже как бы и не пробовал ползать. Но если у тебя в дверях нормальный звук и не хватает только высокочастотного тыц-тыца, то можно попробовать туда замутить что-нибудь :dum
Last edited:
Upvote 0 Downvote
Как ремонтируется авто динамики — АвтоТоп
Содержание
- Устройство типичного динамика акустики
- Классификация динамиков акустики
- Устройство динамиков акустической системы
- Диапазон динамика акустической системы
- Самые интересные ролики на Youtube
- Страницы 1 2 3 4 5 6 7 8
- Read Me.
- Как устроена динамическая головка?
- Какие бывают неисправности динамиков?
- Как выявить неисправный элемент динамика без разборки?
- Как заменить гибкие выводы динамика?
Акустические системы делят на активные, пассивные, разница ограничена наличием внутри микросхем обработки звука, питаемых электрическим током. Усилители, фильтры, интерфейсы считывания флэш-носителей, расшифровки сжатых форматов звука. В последнем случае акустическая система приближается функционалом проигрывателю. Рассмотрим, что делать, когда не работают динамики. Колонки включают несметное число устройств воспроизведения звука, читателям интересно, как ремонтируют акустические системы своими руками. Понадобится специальный клей. В бытность СССР БФ 4,АК 20. Соответственно (основе клея) подбирают растворители. Понадобится, разбирая, демонтировать соединение, починить акустическую систему самостоятельно.
Усилители, фильтры, интерфейсы считывания флэш-носителей, расшифровки сжатых форматов звука. В последнем случае акустическая система приближается функционалом проигрывателю. Рассмотрим, что делать, когда не работают динамики. Колонки включают несметное число устройств воспроизведения звука, читателям интересно, как ремонтируют акустические системы своими руками. Понадобится специальный клей. В бытность СССР БФ 4,АК 20. Соответственно (основе клея) подбирают растворители. Понадобится, разбирая, демонтировать соединение, починить акустическую систему самостоятельно.
Устройство типичного динамика акустики
Подвижная часть с жесткой тарелкой создает колебания воздуха, воспринимаемые человеческим ухом.
Классификация динамиков акустики
Вести ремонт акустических систем своими руками, сомневаясь, как работает устройство, полагается, используя принцип — не навредить. Вне зависимости от размеров динамик акустической системы образован электрической, механической частями. Первая сформирована преимущественно катушками индуктивности. Вторая включает постоянный магнит, мембрану. Приводим неполную классификацию динамиков акустических систем.
Первая сформирована преимущественно катушками индуктивности. Вторая включает постоянный магнит, мембрану. Приводим неполную классификацию динамиков акустических систем.
- Электродинамические устройства воспроизведения образуют три класса, объединяет концепции наличие магнита, движущейся мембраны:
- Катушечные построены по принципу, известному владельцам (ремонтникам) газовых колонок. Магнитное кольцо при подаче напряжения дросселя заставляет двигаться мембрану, согласно закону поданного тока звуковой частоты.
- В ленточных роль переменного магнита выполняет узкий гофр. Никакой катушки, понятное дело, внутри. Для применения динамиков требуются согласующие трансформаторы. Признак, идентифицирующий тип динамика акустической системы.
- Изодинамические громкоговорители включают в состав квадратную, круглую спираль, двигающуюся параллельно мембране в поле постоянного магнита.
- Электростатические устройства воспроизведения отличаются отсутствием движущихся частей.
 Мембрана колеблется, не совершая поступательных движений. Динамики идеально воспроизводят высокие частот, благодаря малой инерционности.
Мембрана колеблется, не совершая поступательных движений. Динамики идеально воспроизводят высокие частот, благодаря малой инерционности.
- В конденсаторных динамиках два электрода. Один ребристый, массивный, подается переменный потенциал. Опора второго электрода, сформированного тонкой фольгой. Сигнал звуковой частоты выказывает переменный характер, пленка притягивается-отталкивается опорой. Специальный механизм регулирует натяг: тонкая фольга обтягивает массивный электрод снаружи. От степени прижатия зависит характеристика динамика.
- Электретные динамики построены на заранее наэлектризованной пленке. Недостаток конструкции прост: через несколько лет статический заряд исчезает, требуется возобновление.
- Пьезокерамические динамики эксплуатируют эффект преобразования электричества в колебания кристалла кварца. Понятно, большой мощности устройства не добьешься, целям воспроизведения высоких частот акустических систем динамик подходит. Главное достоинство технического решения в малом потреблении энергии.

- Ионные динамики практически встречаются редко, теория разработана в 50-х годах. Принцип действия базируется на модуляции ионов газа звуковыми колебаниями. Необходимо получить электрическую дугу. Высказываются идеи использования пламени, сформированного положительными, отрицательными частицами (ионов воздуха).
Читатели знают встречающиеся в природе устройства воспроизведения звука. Далеко не всегда в динамике акустической системы найдется катушка индуктивности. Следовательно, перед ремонтом, в процессе мастер выполняет правильную классификацию устройств, должным образом проводя необходимые операции.
Устройство динамиков акустической системы
Частично коснулись устройства. Рассмотрим подробнее электродинамическими моделями. Диффузор образует опору колпачка. Представлен подобием широкого рупора, на который клеится катушка с обратной стороны. Прямо к колпачку мембраны подходят гибкие медные жилы, несущие электрический ток, пробивая диффузор изнутри. Места пайки видны с фронтальной части динамика. Катушка легкая, требуется обеспечить сравнительно малую инерционность системы. Даже камертонное ля первой октавы лежит на частоте 440 Гц. Понятно, для колебаний указанной скорости, подвижная часть динамика акустики должна быть легкой.
Катушка легкая, требуется обеспечить сравнительно малую инерционность системы. Даже камертонное ля первой октавы лежит на частоте 440 Гц. Понятно, для колебаний указанной скорости, подвижная часть динамика акустики должна быть легкой.
Магнит установлен на станине неподвижно. Обычно кольцевой. В отверстии бегает в обоих направлениях катушка индуктивности, двигая сборку колпачок-мембрана. Провода соединительные совершают постоянные колебания. Для позиционирования подвижной части по вертикальной, горизонтальной оси служит центрирующая шайба. Перфорированный кусок упругого материала, центрирующий расположение колпачка, диффузора. Центрирующая шайба не мешает смещению подвижной части вдоль оси симметрии. Ремонт до смешного прост:
Поскольку мембрана и колпачок не ломаются, дело заключается в проверке электрического монтажа, места пайки проводов, целостность катушки.
Индуктивность наматывается по образу и подобию старой. Каждый слой витков промазывается клеем БФ 4. Некачественная пайка выполняется заново. Методику намотки индуктивность выберите уместную. Обычно делается специальное приспособление, образованное двумя парами стоек, стоящих на длинной доске друг напротив друга. Обе соединены осями. Одна содержит сердечник новой катушки, другая – купленный провод. Проволоку рекомендуется покупать с лаковой изоляцией. Необходимо правильно выдержать толщину. Измерить можно, используя штангенциркуль.
Некачественная пайка выполняется заново. Методику намотки индуктивность выберите уместную. Обычно делается специальное приспособление, образованное двумя парами стоек, стоящих на длинной доске друг напротив друга. Обе соединены осями. Одна содержит сердечник новой катушки, другая – купленный провод. Проволоку рекомендуется покупать с лаковой изоляцией. Необходимо правильно выдержать толщину. Измерить можно, используя штангенциркуль.
Намотка ведется сравнительно быстро, пока клей высыхает. Витки ложатся плотно один к другому, исповедуя принцип челнока. Важно выдержать правильно количество оборотов, должным образом расположить выводы.
Часто приходится разбирать динамик акустической системы для ремонта. Запаситесь растворителем. Клееные соединения смачиваются, выжидается фиксированное время. Обратите внимание: стыки тщательно зачищаются. Делается вне зависимости от используемого клея для сборки динамика акустической системы.
Диапазон динамика акустической системы
Динамики акустических системах разных типов, каждый имеет ограниченный диапазон воспроизводимых частот. Каждый работает своеобразным механическим фильтром. Однако случается, требуется сместить диапазон… Можно поднять частоты резонанса электродинамической системы, покрыв лаком центрирующую шайбу. Используются 5–10% раствор ЦАПОН, целлюлоза в ацетоне. Лак наносится мягкой кисточкой кругом. Избегайте расцентровки подвижной части динамика акустической системы. Последовательно выполняя операции, повысим частоты резонанса в 1,5–2 раза, примерно одна октава.
Каждый работает своеобразным механическим фильтром. Однако случается, требуется сместить диапазон… Можно поднять частоты резонанса электродинамической системы, покрыв лаком центрирующую шайбу. Используются 5–10% раствор ЦАПОН, целлюлоза в ацетоне. Лак наносится мягкой кисточкой кругом. Избегайте расцентровки подвижной части динамика акустической системы. Последовательно выполняя операции, повысим частоты резонанса в 1,5–2 раза, примерно одна октава.
Чтобы понизить диапазон, следует наклеить утяжелители на подвижную часть. Правильное кольцо картона, крепится к обратной стороне диффузора. Следует поточнее выдерживать симметрию расположения деталей. Звуковое давление стремительно падает. Уменьшается громкость, происходит сужение диапазона со стороны высоких частот. Однако в области резонанса динамик акустической системы будет демонстрировать хорошие характеристики.
Расширить диапазон можно в обе стороны (если нет колпачка). По центру, с фронтальной части, над катушкой индуктивности динамика акустической системы клеится усеченный конус. Масса делается по возможности меньше. Подойдет тонкая, плотная бумага, пропитанная лаком ЦАПОН. Верхняя площадка равна катушке, высота составляет половину диффузора, конусность 70 градусов. За счет прибавки массы подвижной части резонансная частота падает, зато верхний край диапазон поднимается, благодаря жесткой сердцевине, тверже, нежели диффузор. В результате происходит расширение спектра воспроизводимых звуков в обе стороны. Суммарный прирост составит полторы-две октавы, овчинка стоит выделки. Позаботьтесь правильно настроить электронную часть: если имеются пассивные фильтры на конденсаторах и резисторах, ограничат (обрежут) возможности механики.
По центру, с фронтальной части, над катушкой индуктивности динамика акустической системы клеится усеченный конус. Масса делается по возможности меньше. Подойдет тонкая, плотная бумага, пропитанная лаком ЦАПОН. Верхняя площадка равна катушке, высота составляет половину диффузора, конусность 70 градусов. За счет прибавки массы подвижной части резонансная частота падает, зато верхний край диапазон поднимается, благодаря жесткой сердцевине, тверже, нежели диффузор. В результате происходит расширение спектра воспроизводимых звуков в обе стороны. Суммарный прирост составит полторы-две октавы, овчинка стоит выделки. Позаботьтесь правильно настроить электронную часть: если имеются пассивные фильтры на конденсаторах и резисторах, ограничат (обрежут) возможности механики.
Мастера повышают звуковое давление на резонансной частоте для неэкранированной магнитной системы. Постарайтесь найти такое или похожее установленное кольцо. Потом приклеить второй магнит на обратную сторону стоящего, усилится взаимодействие полей, следовательно, сила звука возрастет.
Устройство акустической системы нехитрое, что способно сломаться, рассказали. Надеемся, ремонт пройдет без сучка и задоринки.
На сегодня, количество любителей хорошего звука, которые просто выкидывают захрипевший динамик не уменьшается! При этом затраты на аналог могут составить ощутимую сумму. Думаю что нижеизложенное поможет починить динамик любому, кто имеет руки, которые растут из нужного места.
Имеется в наличие — чудо дизайнерской мысли, когда то бывшее колонкой S-30 (10АС-222), теперь выполняющее функции одного из автосабов. Пациент через неделю, после мутирования стал проявлять признаки заболевания — издавал посторонние призвуки при отрабатывании басовых партий, чуть похрипывал. Было принято решение провести вскрытие.
После вскрытия на божий свет из тела пациента был извлечён больной орган — НЧ динамик 25ГДН-1-4 86 года выпуска. Орган явно нуждался в операции — при аккуратном нажатии на диффузор раздавался посторонний призвук (очень похожий на тихий щелчок), а при прозвонке различными тонами (вырабатываемых программой nchtoner) раздавалось явно слышное пошкрябывание-потрескивание при большом ходе диффузора и при подавании сверхнизких (5-15Гц) частот. Было принято решение трепанировать данный орган
Было принято решение трепанировать данный орган
Сначала у пациента были отпаяны гибкие подводящие провода (со стороны контактных площадок)
Затем растворителем (646 или любой другой, способный растворить клей, типа «Момент») при помощи шприца с иглой было смочено место склейки пылезащитного колпачка и диффузора (по периметру).
. место приклеивания центрирующей шайбы к диффузору (по периметру).
. и место приклеивания самого диффузора к корзине диффузородержателя (опять же по периметру)
В таком состоянии динамик был оставлен на минут 15 с периодическим повторением предыдущих трёх пунктов (по мере впитывания/испарения растворителя)
Внимание! При работе с растворителем следует соблюдать меры безопасности — не допускать попадания на кожу (работать в резиновых перчатках!) и слизистые оболочки! Не есть и не курить! Работать в хорошо проветриваемом помещении!
При смачивании — пользоваться небольшим количеством растворителя, избегая попадания его на место приклеивания катушки и центрирующей шайбы!
В зависимости от типа растворителя и температуры воздуха, через 10-15 минут сказанных выше операций с помощью острого предмета можно аккуратно поддеть пылезащитный колпачок и снять его. Колпачок должен либо отойти очень легко, либо оказать очень слабое сопротивление. Если нужно прилагать значительное усилие — повторите операции со смачиванием его краёв растворителем и ожиданием!
Колпачок должен либо отойти очень легко, либо оказать очень слабое сопротивление. Если нужно прилагать значительное усилие — повторите операции со смачиванием его краёв растворителем и ожиданием!
После отклеивания колпачка — аккуратно выливаем остатки растворителя из углубления около оправки катушки (путём переворачивания пациента).
К этому времени успевает отклеится центрирующая шайба. Аккуратно, не прилагая усилий, отделяем её от корзины диффузородержателя. при необходимости — повторно смачиваем место склейки растворителем.
Смачиваем место приклейки диффузора к диффузородержателю. Ждём. Смачиваем снова и опять ждём. Минут через 10 можно попробовать отклеить диффузор. В идеале он без усилий должен отделится от диффузородержателя (вместе с катушкой и центрирующей шайбой). Но иногда требуется ему немного помочь (главное — аккуратность! Нельзя повреждать резиновый подвес. )
Очищаем места склейки от старого клея и просушиваем разобранный динамик. Осматриваем разобранного пациента на предмет нахождения неисправности. Смотрим на катушку. При отсутствии на ней потёртости и отклеившихся витков — оставляем её в покое. При отклеивании виточка — приклеиваем его обратно тонким слоем клея БФ-2.
Осматриваем разобранного пациента на предмет нахождения неисправности. Смотрим на катушку. При отсутствии на ней потёртости и отклеившихся витков — оставляем её в покое. При отклеивании виточка — приклеиваем его обратно тонким слоем клея БФ-2.
Внимательно осматриваем место крепления подводящих проводков к диффузору. Так и есть — у пациента наиболее часто встречающаяся у старых динамиков имеющих большой ход диффузора неисправность. Подводящий проводок в месте крепления перетёрся/переломился. О каком контакте может идти речь, когда всё висит на пропущенной в центр проводка нитке!
Аккуратно отгибаем медные «усики».
. и отпаиваем подводящий проводок.
Повторяем операцию для второго проводка (даже если он ещё жив — болезнь легче предупредить!)
Обрезаем подводящие проводки по месту излома.
. и облуживаем получившиеся кончики (само собой — сначала используем канифоль). Тут необходима аккуратность! Используйте малое количество лёгкоплавкого припоя — припой впитывается в проводок, как в губку!
Аккуратно припаиваем проводок на место, загибаем медные «усики» и проклеиваем клеем (Момент, БФ-2) место прилегания проводка к диффузору. Запоминаем — паять проводок к крепёжным «усикам» — нельзя! Иначе как проводки можно будет поменять снова лет через десять?
Запоминаем — паять проводок к крепёжным «усикам» — нельзя! Иначе как проводки можно будет поменять снова лет через десять?
Собираем динамик. Ставим диффузор со всем «хозяйством» в диффузородержатель, ориентируя проводки к местам их крепления. Затем проверяем правильность полярности — при подсоединении 1,5В пальчиковой батарейки к выводам, при подключении «+» батарейки к «+» динамика — диффузор будет «выпрыгивать» из корзины. Ставим диффузор так, что бы его «+» подводящий проводок был у обозначения «+» на корзине динамика.
Припаиваем подводящие проводки к контактным площадкам. Обращаем внимание, что длинна проводков уменьшилась почти на полсантиметра. Поэтому паяем их не как было на заводе — к отверстию в пластине, а с минимальным запасом, для сохранения длины.
Центрируем диффузор в его корзине с помощью фотоплёнки (или плотной бумаги), которую помещаем в зазор между керном и катушкой. Главное правило — помещаем центрировку равномерно по периметру, для соблюдения одинакового зазора. Количество (или толщина) центрировки должна быть такой, что бы при небольшом высовывании диффузора наружу он свободно держался на ней и не проваливался внутрь. Для динамика 25ГДН-1-4 для этого достаточно 4-ёх кусочков фотоплёнки, помещаемых попарно друг перед другом. Длинна фотоплёнки должна быть такой, что бы она не мешала, если положить динамик на диффузор. Для чего — читайте ниже. Приклеиваем диффузор. Пользуемся показанием к используемому клею (рекомендую «Момент», главный критерий выбора, что бы клей в дальнейшем можно было растворить растворителем). Я обычно высовываю диффузор на 1-1,5 см вверх, что бы центрирующая шайба не касалась корзины диффузородержателя, затем кисточкой наношу на неё и корзину тонкий слой клея, выжидаю и плотно всовываю диффузор внутрь, дополнительно прижимаю шайбу к корзине по периметру с помощью пальцев. После чего приклеиваю диффузор (в вдвинутом состоянии, не допуская перекоса).
Оставляем динамик в перевёрнутом виде на несколько часов под грузом (вот по этому наша фотоплёнка и не должна выступать за плоскость диффузора!).
После чего проверяем динамик на верность сборки. Достаём центрировку и аккуратно проверяем пальцами ход диффузора. Он должен ходить легко, не издавая призвуков (касанья катушки и керна быть не должно!). Подсоединяем динамик к усилителю и подаём на него низкочастотные тона небольшой громкости. Посторонние призвуки должны отсутствовать. При неправильном приклеивании (допущен перекос и т.д.) -динамик нужно расклеить (смотри выше) и собрать заново, соблюдая аккуратность! При качественной сборке мы в 99% получим полностью рабочий динамик.
Промазываем клеем кромку пылезащитного колпачка, выжидаем и аккуратно приклеиваем его к диффузору. Тут необходима аккуратность и точность — криво наклеенный колпачок не влияет на качество звука, зато очень портит внешний вид динамика. при приклеивании нельзя нажимать на центр колпачка. Он от этого может прогнуться и придётся его отклеивать, выпрямлять, промазывать изнутри тонким слоем эпоксидки для прочности и приклеивать обратно.
Выжидаем, пока полностью произойдёт склейка всех частей (около суток) и ставим готовый динамик на его место. Наслаждаемся звуком, который ничем не хуже, чем у нового заводского аналогичного динамика.
Вот и всё, теперь вы видите, что починить динамик — лёгкое дело. Главное — неторопливость и аккуратность! Так за час не спеша можно починить практически любой НЧ или СЧ динамик отечественного или импортного производства (для расклейки импортных динамиков зачастую требуется более мощный растворитель, например ацетон или толуол, аккуратно — они ядовиты. ) имеющий аналогичный дефект.
Да, после операции у бывшего больного открылось второе дыхание и весёлые жёлтые сабы продолжают делать свой нелёгкий басовый труд:
Как отремонтировать динамик самому? FAQ Часть1
Это первая часть руководства по ремонту головок громкоговорителей.
Здесь Вы найдёте информацию об используемой терминологии, неисправностях динамиков и самом простом ремонте, когда требуется только замена гибких выводов. Другие вопросы будут рассмотрены в очередных статьях.
Самые интересные ролики на Youtube
Навигация по FAQ-у.
Страницы 1 2 3 4 5 6 7 8
Read Me.
Навигация по этому FAQ-у такова. Весь материал разбит на части, но при этом через «Навигацию», расположенную вверху любой страницы, можно попасть в любую точку этого FAQ-а или вернуться обратно.
Сделано это для того, чтобы перегруженная страница не стала неподъёмной для людей со слабым Интернет-каналом или тех, кто заходит в сеть через iPhone, iPod и пр.
По мере того, как будут публиковаться те или иные страницы, ссылки в меню навигации будут становиться активными.
Я делаю это впервые, поэтому возможны накладки с адресацией. О замеченных ошибках просьба сообщать в комментариях!
Пара слов о терминологии.
Динамической головкой, или головкой громкоговорителя, или сокращённо динамиком, называют электромеханическое устройство, преобразующее изменение силы и направления электрического тока в звуковые волны. https://oldoctober.com/
Громкоговорителем, или колонкой, или Акустической Системой (АС), называют акустическое оформление динамиков или, проще говоря, коробку, в которую вмонтирован динамик или динамики, если их несколько.
Если динамиков больше одного и они разные, то АС называют многополосной. Динамики условно делят на низкочастотные (НЧ), среднечастотные (СЧ) и высокочастотные (ВЧ).
В этом цикле статей речь пойдёт в основном о ремонте динамиков. АС же будут упоминаться только в этой связи.
В «Навигации» отсутствует несколько вопросов, ответы на которые мне известны.
- Как склеить магнит с фланцами и при этом отцентровать керн?
- Как изготовить пылезащитный колпачок?
- Как изготовить подвес для динамика?
- Как изготовить диффузор?
- Как изготовить центрирующую шайбу?
Я сомневаюсь в том, что на сегодняшний день, эти технологии ремонта ещё актуальны, так как большинство запасных частей можно приобрести отдельно. Тем не менее, если ответы на какие-то из этих вопросов заинтересуют самодельшиков, то я постараюсь подробно ответить и на них тоже, после того, как закончу писать основные темы.
Как устроена динамическая головка?
На схематическом рисунке изображён динамик в разрезе. Примерно так устроены низкочастотные и среднечастотные головки громкоговорителей.
Головка громкоговорителя (далее Динамик) состоит из следующих частей.
- Подвес (гофр).
- Гибкий вывод (косичка).
- Скобка (крепит косичку к диффузору).
- Демпфер (защищает косичку от перелома возле клеммы).
- Отверстие в корпусе для гибкого вывода.
- Изолирующая планка (удерживает клемму).
- Клемма.
- Пайки, соединяющие гибкий вывод с клеммой и выводом катушки.
- Вывод катушки.
- Катушка.
- Корпус динамика (корзина, каркас).
- Диффузор (мембрана, диафрагма).
- Пылезащитный колпачок (заглушка).
- Центрирующая шайба.
- Гильза.
- Полюсный наконечник.
- Керн.
- Верхний фланец.
- Магнит.
- Нижний фланец.
Буквами N и S обозначены Северный и Южный полюсы магнита. Это обычное расположение полюсов, хотя изредка встречается и противоположное.
На следующей картинке условный чертёж ВЧ динамика в разрезе.
- Вывод катушки.
- Изолирующая прокладка.
- Подвес (эластичное продолжение купола).
- Диффузор купольной конструкции (мембрана, диафрагма).
Основным отличием ВЧ динамиков от СЧ и НЧ головок, является отсутствие центрирующей шайбы.
Кроме этого, во многих ВЧ головках используется диффузор купольной конструкции, который часто называют мембраной. Купол и подвес у таких динамиков представляют собой единое целое, а гильза крепится к куполу.
Так как ход диффузора ВЧ динамика невелик, то часто роль гибких выводов исполняют выводы катушки.
Какие бывают неисправности динамиков?
Неисправности динамиков возникают в связи с неправильной эксплуатацией, неквалифицированной сборкой или нормальным износом.
Чаще всего повреждения происходят из-за превышения подводимой к динамику мощности. Одной из причин подобных ошибок может быть путаница с методом определения мощности динамика и усилителя. Это обусловлено тем, что одни и те же численные значения эффективной, среднеквадратичной (RMS), или как её ещё называют, синусоидальной мощности и мощности амплитудной или музыкальной создают в катушке динамика ток, отличающийся в два раза.
Другой причиной, вызывающей перегрузку динамиков, является неосмотрительное перераспределение мощности между головками многополосных АС. Чаще всего от этого страдают ВЧ динамики – пищалки. Дело в том, что мощность пищалок в многополосных системах может составлять менее 10% от общей мощности АС. И если пользователь при помощи эквалайзера подаст бо’льшую часть мощности усилителя в ВЧ динамик, то смерть последнего может быть мгновенной.
Имеют место так же и механические повреждения пылезащитного колпачка, подвеса и диффузора. Иногда эти повреждения приводят к нарушению центровки, что в свою очередь приводит к разрушению катушки и гильзы.
Разрушение гильзы и катушки могут быть вызваны и смещением керна. В таких случаях гильзу вместе с катушкой заклинивает в магнитном зазоре. Обычно это происходит в результате падения громкоговорителя или динамика.
Из-за неквалифицированной сборки может отклеиться гильза, катушка, подвес или центрирующая шайба. Некачественная склейка также может стать причиной появления посторонних призвуков.
Неправильное крепление гибких выводов может значительно снизить их ресурс.
Если головка громкоговорителя собрана качественно, то в результате нормального износа больше всего страдают подвес и гибкие выводы. Диффузор тоже может разрушиться, если его запас прочности не соответствует мощности динамика.
Как выявить неисправный элемент динамика без разборки?
Все неисправности динамиков можно условно разделить на «механические» и «электрические». Однако некоторые электрические дефекты отличить от механических на слух очень сложно.
Если никаких внешних изменений, таких как разрушение гофра или диффузора не выявлено, но при этом появились посторонние призвуки в виде потрескивания или происходит периодическое пропадание звука, то сначала следует проверить гибкие выводы.
Для этого подключают стрелочный омметр к клеммам динамика и шевелят косички при неподвижном диффузоре. Если при этом стрелка омметра двигается, значит, гибкий вывод повреждён.
К другим электрическим дефектами относятся обрыв катушки и замыкание части витков катушки или всей катушки. Эти дефекты также можно выявить при помощи омметра.
Если гибкие выводы и катушка «звонятся» как исправные, то можно попытаться выявить источник паразитных призвуков при помощи генератора низкой частоты.
| Get the Flash Player to see this player. |
Для этого на вход усилителя подают сигнал задающего генератора.
Ссылка на портативную программу генератор низкой частоты есть в «Дополнительных материалах».
Частично отклеившуюся катушку или часть витков можно выявить, плавно меняя частоту генератора или включив генератор в режим ГКЧ (Генератор Качающейся Частоты).
При проверке этого динамика был использован диапазон ГКЧ 20Гц…2кГц с периодом 3 секунды. В данном динамике, видимо, отклеилась существенная часть катушки так как призвуки слышны в большом диапазоне частот. Если от гильзы отклеивается небольшой фрагмент катушки, призвуки могут появляться только на какой-нибудь отдельной частоте, и только тогда, когда повреждённый элемент конструкции входит в резонанс.
В некоторых случаях, для выявления неисправности, полезно использовать генератор инфранизких частот. Это может помочь выявить, например, дефекты склейки резинового гофра с диффузором. Стрелкой показано место, где формируется призвук.
| Get the Flash Player to see this player. |
Затирание гильзы о керн или катушки об внутреннюю поверхность верхнего фланца также можно вывить на частоте в несколько герц, если слегка прижать пальцами волны гофра.
Конечно, для дефектовки динамиков на слух, требуется некоторый опыт, но он быстро приходит, так как характер и тембр паразитных призвуков соответствует размеру и материалу конструктивных элементов динамика.
Более серьёзные повреждения динамиков выявить ещё проще.
Так, например, если при переворачивании динамика что-то слышно, то значит, от гильзы отвалилась часть витков или вся катушка.
Если диффузор двигается очень плохо, то, скорее всего, катушка слетела и заклинила гильзу в магнитном зазоре.
Если диффузор вообще не двигается, то, возможно, сдвинулся керн и заклинил катушку вместе с гильзой.
Никогда не пытайтесь разбирать такой динамик, предварительно не освободив гильзу, так как это может привести ещё и к повреждению диффузора.
Как заменить гибкие выводы динамика?
Будьте крайне осторожны при замене гибких выводов на неразобранном динамике, так как стальной инструмент, притянутый магнитной системой, может повредить диффузор и пылезащитный колпачок.
Если доступ к гибким выводам (косичкам) динамика свободен, то можно попытаться заменить их, не разбирая динамик. Но, в некоторых случаях, динамик придётся всё же разобрать. На картинке надломленный гибкий вывод.
Демонтировать старые гибкие выводы следует с максимальной осторожностью, чтобы не повредить диффузор и не оборвать выводы катушки.
Сначала разгибают латунную скобку, удерживающую гибкий вывод, если она, конечно, есть.
Затем прогревают паяльником место пайки, чтобы отделить от диффузора, и гибкий вывод, и вывод катушки. Обычно, после прогрева, клей размягчается и выводы можно демонтировать.
Чем можно заменить повреждённые гибкие выводы?
Конечно, самое простое решение, это позаимствовать гибкие выводы у другого динамика близкой мощности или заказать у поставщиков, торгующих запасными частями для динамиков. Но, если такой возможности нет, или Вы хотите сэкономить на запасных частях, то можно изготовить суррогатные косички самому.
Я Вам могу предложить два хорошо зарекомендовавших себя варианта замены. Обе эти технологии прошли самые жёсткие испытания на динамиках, работающих с большими перегрузками.
Первый и более простой вариант, это замена вышедшей из строя косички отрезком провода МГТФ подходящего сечения. Кто это впервые придумал, я не знаю, но именно с такими гибкими выводами поступали в продажу некогда популярные динамики 4A32.
Другой вариант, это изготовление косичек из гибкого телефонного кабеля советского производства. Его до сих пор можно найти среди всякого хлама на блошиных рынках.
Мне знакомо два типа такого кабеля. В одном, каждый провод состоит из семи жил, а в другом из четырнадцати. Каждая жила изготовлена путём намотки медной ленты на лавсановую нить. В разрезе лента имеет форму прямоугольника размерами 0,03 х 0,3мм.
Нетрудно рассчитать общее сечение.
0,03 * 0,3 * 14 = 0,126(мм²)
Как видите, сечение невелико, поэтому для мощных динамиков можно скрутить два и более многожильных проводов.
Вначале отрезок или отрезки телефонного кабеля препарируется при помощи паяльника.
Изоляция удаляется небольшими участками, во избежание повреждения жил.
Затем жилы каждого многожильного провода раскручиваются и снова скручиваются уже в один провод.
Чтобы во время лужения сохранить скрутку, края провода зажимаются между двумя деревянными прищепками. Затем будущие концы косички лудятся. В качестве шаблона используется оригинальный гибкий вывод.
И, наконец, гибкий вывод дважды тщательно проклеивается резиновым или 88-м клеем с интервалом в 20-ть минут.
До первой проклейки скрутка должна быть свободной, чтобы клей проник промеж жил. Сразу после первой проклейки жилы скручиваются до конца. Вторая проклейка окончательно фиксирует жилы относительно друг друга.
Таким образом, можно изготовить гибкий вывод для динамика любой мощности.
Если нет ни телефонного ни МГТФ провода, то в качестве временной меры можно использовать провод МГШВ или даже оплётку от экранированного провода, но такие косички долго не живут, да и нагрузку на диффузор оказывают бо’льшую, из-за меньшей гибкости.
При установке гибкого вывода, нужно учитывать, что самыми слабыми местами данного узла являются места крепления косички к диффузору и клемме.
Если крепёжные скобки повреждены или утеряны, то косичка крепится двумя перекрещенными стежками нити. Затем место крепления проклеивается клеем с большим сухим остатком. Подойдёт выветрившийся БФ-2/БФ-4.
Для предотвращения преждевременного перелома косички, места крепления покрываются несколькими слоями резинового или 88-ого клея с переходом на гибкий вывод.
10pcs/lot SD6835 Контрольный чип DIP DIP-8 Обедать Развлекательно
Заканчивать связь больше с он-лайн stie сети фармации с серией уцененных non rx лекарств!
10 шт./лот SD6835 Чип управления DIP DIP-8 Обеденный Развлекательный
Развлекательные сервировочные блюда, подносы и тарелки Чип и наборы для погружения 10 шт. / Лот SD6835 Контрольный чип DIP DIP-8 Обедать Развлекательно для ключевых слов обеспечивают модули. Полный поиск по странам Возврат средств будет только профессионально удовлетворительным. Каждые десятки и время 6-17days.Some IC для запроса.
Мы ускорили запрос, тысячи клиентов не могут сделать обслуживание в течение всего 3-7 удовлетворительных сроков.) Мы будем больше (исключая необходимость усилий, чем возврат доставленной услуги. Время доставки не нужно посылка в DHL. Вам больше. дней.. удаленное предложение DHL или вы берете электронный магазин заказа. /Лот SD6835 Чип управления DIP DIP-8 Столовая Развлекательная
для ключевых слов предоставить модули. Полный поиск по странам Возврат средств будет только профессионально удовлетворительным. Каждые десятки и время 6-17days.Some IC для запроса.
Мы ускорили запрос, тысячи клиентов не могут сделать обслуживание в течение всего 3-7 удовлетворительных сроков.) Мы будем больше (исключая необходимость усилий, чем возврат доставленной услуги. Время доставки не нужно посылка в DHL. Вам больше. дней.удаленное предложение DHL или вы берете электронный магазин заказа.
Если без ограничения суммы бесплатно 200$, предоставить услугу. быть подготовка использования поставщика
заказов Если отправить продукты заряда.
Мы к аксессуарам моя воля
RHGEIUCY Ретро Деревянный Открытый Беспроводной Bluetooth Динамик Мини Портативный Мобильный Компьютер Настольный Домашнее Аудио Классический Стиль Портативный Беспроводной Динамик Цвет Черный Портативные Колонки Доки Ambesonne Грибное Хранение Игрушечный Мешок Стул Повторяющееся Абстрактное Органическое Растение Джунглей в Осенних Цветах Органайзер для Чучел Животных Моющийся мешок Небольшой размер Бледно-оливково-зеленый Бежевый Сундуки для игрушек Хранение Trupow 2115GPH Большой поток Регулируемая частота Встроенный аквариумный фонтан Аквариум Водопад Соль Свежий пруд Погружной фильтр Водяная помпа с керамическим валом Аквариумные насосы Фильтры GIRLSIGHT 4 Будильник с двумя колокольчиками и забавным циферблатом для животных Подсветка Работает от батареи Громко Будильник 220. a LionessGray Декор для детской комнаты GPPZM 6 шт. Фарфоровая глазурь ручной работы Чайный набор кунг-фу Чайный набор дзен Чай для здоровья Чайник большой емкости Чайная чашка Кофейный горшок Кофейные чашки Столовая Развлекательный набор регулируемых гантелей Araxg 2 в 1 пара Вес гантелей весом 88 фунтов Подъем штанги с шатуном для Женщины Мужчины S trength Бодибилдинг Тренировки Домашний тренажерный зал Фитнес-оборудование Универсальные упражнения для фитнеса Желтое золото 585 пробы Маленькая подвеска на шляпу пожарного 7 мм x 14 мм Замена ювелирных изделий для лампочки/лампы 52165-op Проектор Лампа для телевизора от Technical Precision Аудио-видео аксессуары YIZAN Ginger Garlic Wasabi Терка Измельченный чеснок Устройство Кухонный инвентарь Сталь Кухонная утварь Гаджеты 12 рулонов Самоклеящаяся бинтовая повязка 3 дюйма X 5 ярдов Клейкая лента Ветеринарная обертка для оказания первой помощи Спорт Запястье и лодыжка Бежевый 3 дюйма Первая помощь
БУДЬТЕ НЕПРОФЕССИОНАЛЬНЫМИ
Есть одна вещь, которая отличает единственных в своем роде людей и компании: то, как люди продвигают людей через процессы бизнеса и жизни.
Это ваш уникальный шанс превратить свое существование в мир легкости, веселья, процветания и успеха.
ПРИСОЕДИНЯЙТЕСЬ К ДВИЖЕНИЮ
ДОБРО ПОЖАЛОВАТЬ В БУДУЩЕЕ
ВЫ ВИДИТЕ ЛУЧШИЙ ПУТЬ.
ВЫ ГОТОВЫ ПРОБЕЛАТЬ НОВЫЙ КУРС К СПОКОЙСТВУЮЩЕМУ МОРЮ.
ВЫ ЗНАЕТЕ, ЧТО ПРИВЕДЕЛО ТЕБЯ ТУДА ТУДА , А НЕ ЧТО ДОСТАВИТ ТЕБЯ ТУДА, КУДА ВЫ НАПРАВЛЯЕТЕСЬ.
Привет, я Хилари
Я пью матча, люблю любопытство, королева процесса, а также подкастер, спикер и многопрофильный предприниматель.
Я сделал себе имя, совершенствуя процессы в Toyota в Сингапуре, и теперь помогаю компаниям среднего размера и сервисным организациям стать лидерами рынка.
Я основал The Human Way™, чтобы помочь компаниям, наконец, правильно организовать процессы.
Чем я могу вам помочь?
Стратегии, системы и ресурсы, которые сделают жизнь и работу более человечными.
Я
ИНДИВИДУАЛЬНОЕ ЛИЦО
Я
ОРГАНИЗАЦИЯ
ВЫ ХОТИТЕ…
Быть более конкурентоспособными?
Изучите ключевые элементы Пути человека
™ и как интегрировать их в свою работу или организацию в этом 60-минутном мастер-классе
в прямом эфире с Хилари Корна.
купить сейчас
Прочитать новую идею
, которая изменит правила игры?
UNprofessional: «Манифест» выходит в виде книги в
2022 году. Руководство по навигации в
новой человеческой эре, которое революционизирует то, как
вы работаете, и способствует вашему успеху.
Предзаказ Забронировать сейчас
Заказать Kickass Speaker
для следующего мероприятия?
Ваше мероприятие заслуживает уверенного и
проницательного женского голоса. Я приношу удовольствие,
Энтузиазм и опыт для каждого сеанса
, виртуального или личного, чтобы создать
опыт, о котором ваша аудитория не может перестать говорить.
ПОГОВОРИМ
Непрофессиональная серия
Получите книгу
Непрофессиональный: запуск Manifesto
в 2022
Предварительный заказ
Podcast
Слушайте последний эпизод и подписывает
на некоммурный подпрокат.
Прослушать
Непрофессиональная серия
Получите книгу
Непрофессиональный: запуск Manifesto
в 2022 году
Предварительный заказ
Podcast
Послушайте последний эпизод и подписывает
на некоммурный подпрокат.
Прослушать
соусов BBC | diyAudio
Перейти к последнему
кспв
Член
#1
- #1
Правда ли, что некоторые производители динамиков преднамеренно предусматривают так называемый «провал BBC» в частотной характеристике своих динамиков. Какова цель обеспечения «провала BBC» в громкоговорителе? Проводились ли какие-либо исследования его влияния на музыкальность динамиков? Поскольку верность — это точное воспроизведение оригинального записанного звука, не противоречит ли принципам высококачественного звука разработка динамиков с «провалом BBC». Разве звук не окрашен таким образом?
марка
Член
#2
- #2
Да есть «провал Би-би-си». Это «вежливый» провал в средних частотах, чтобы динамик звучал больше по вкусу среднестатистическому человеку.
сретен
Р.И.П.
#3
- #3
«Провал» представляет собой компенсацию внезапного увеличения внеосевого отклика
, когда твитер выходит за пределы обычно больших
среднечастотных блоков в случае BBC, почти все из которых имеют размер 8 дюймов или больше.
Он не нужен и не плохо работают с мелкими средними частотами
сретен.
марка
Член
#4
- #4
сретен сказал:
«Провал» — это компенсация внезапного увеличения отклика
вне оси, когда твитер выходит за пределы обычно больших
среднечастотных блоков в случае BBC, почти все они имеют размер 8 дюймов или больше.
Не нужен и плохо работает с маленькими СЧ.
сретен.
Нажмите, чтобы развернуть…
Да, это увеличение яркости средних частот — это то, что устраняет провал BBC, что делает динамик менее выдающимся и, как говорится, более «вежливым».
сретен
Р.И.П.
#5
- #5
Маркп сказал:
Да, это увеличение яркости средних частот — это то, что устраняет провал BBC, что делает динамик менее выдающимся и, как говорится, более «вежливым».
Нажмите, чтобы развернуть…
Дело в том, что для колонок «Би-Би-Си» она точнее.
сретен.
Ап
Член
#6
- #6
Дип для большого черного члена — это фалиси.
Взгляните на графики отклика…
http://www.harbeth. co.uk/images/35acurve1b.jpg
Проблема возникла из-за конуса Bextrene, используемого в LS3/5a, он имел ярко выраженный излом на уровне около 1k из-за материала конуса или подвески.
Я предполагаю, что «падение» было введено, чтобы исправить это, и результатом был плоский отклик.
Примечание: одной из причин, почему 3/5a звучали вежливо, была очень плавная характеристика на 30 градусов вне оси, что часто упускалось из виду (или слышалось) в большинстве динамиков в то время.
Грегм
Член
#7
- #7
Автор: sreten
«Провал» является компенсацией внезапного увеличения отклонения от осиНажмите, чтобы развернуть…
Идея заключалась в том, что даже ровная АЧХ на частоте 1,5-~3кГц раздражает слух, пронзительна и утомительна, особенно на классике. Решение состояло в том, чтобы ввести небольшое затухание, опускающееся (1-2 дБ) между 300-3 кГц, а еще лучше, 2-3 дБ между 100-10 кГц.
Я не возражаю против этой идеи, на самом деле, я бы хотел, ЕСЛИ после этого я смогу получить плоское расширение…
сретен
Р.И.П.
#8
- #8
Ап сказал:
Дип BBC — это фалиси.
Нажмите, чтобы развернуть…
Грегм сказал:
Идея заключалась в том, что даже ровная АЧХ @1,5-~3кГц раздражает слух, пронзительна и утомительна, особенно на классике. Решение состояло в том, чтобы ввести небольшое затухание, опускающееся (1-2 дБ) между 300-3 кГц, а еще лучше, 2-3 дБ между 100-10 кГц.
Нажмите, чтобы развернуть…
Хм. ……
AP, LS3/5A не нуждается в компенсации или не имеет такой компенсации, как заявлено
, она использовалась в динамиках BBC с 8-дюймовыми или более среднечастотными динамиками.
Прости, ГрегМ, но это не классический «провал BBC» по любому определению
, провал находится около точки c/o и очень локален для частотного диапазона
.
Голос динамика BBC, с другой стороны, предпочитает в основном
плавно падающую характеристику , 2дБ/3дБ по диапазону, но это
не феномен «провала BBC», это просто общее звучание.
Эта «звонкость» должна быть менее выраженной, чем различия
в отклике патронов ММ, и подходит более ярким
точным образцам патронов.
Бюджетные картриджи часто падают ~6дБ по всему диапазону частот.
Редактировать:
Я просто отмечу, что провал был скопирован некоторыми производителями
без явного понимания его назначения, однако метод
все еще используется сегодня, уменьшая осевой выход, если он есть
— это пик отклика вне оси, чтобы получить сбалансированный результат.
сретен.
Бигун
Участник
#9
- #9
нашел это в интернете
биллшурв
Участник
#10
- #10
хорошо, я прочитал достаточно ссылок на провал 1-3 кГц, дающий усиленное ощущение глубины, от Broskie до Linkwitz, что предполагает, что иллюзия, которую он создает, реальна. Однако Сретен, вероятно, прав, что в некоторых проектах он присутствует по другим причинам. Конечно мой апогей провал в кроссовере.
Конечно, это может быть бабушкина сказка, ставшая общепринятым невежеством!
Infinia
Член
#11
- #11
Сретен любит придумывать истории, основанные на его POV. В другом случае он утверждал, что так называемый провал BBC на самом деле был пиком на верхнем конце ВЧ, я пытался бороться с ним по поводу этой заявленной истории, и он сказал, что знает это, потому что он британец. Вы можете изучить историю LS3 / 5A и всех различных поставщиков драйверов, а затем посмотреть его схемы xover в ранних версиях (обратите внимание на все отводы уровня). имели свой собственный звуковой почерк (может быть, как «винтажный» сериал). Вероятно, это просто еще один миф, все еще гуляющий по интернету.
райма
Член
#12
- #12
сретен сказал:
С другой стороны, звучание динамиков BBCв основном предпочитает плавно падающий отклик,
2 дБ/3 дБ по всему диапазону, но это не явление «провала BBC», а просто общее звучание.Нажмите, чтобы развернуть…
Компания Acoustic Research также предоставила этот отклик при «нормальной» настройке среднего/высокого уровня громкости.
При включении на максимум элементы управления давали «плоский» отклик.
система7
Член
№13
- №13
@ Инфиния.
Должен признаться, я думал, что BBC Dip представляет собой плавный спад частотной характеристики в 4 дБ по всему диапазону, примером которого является голос Троелса Гравесена с помощью LR2 ScanSpeak-3W-Discovery.
По-видимому, уменьшает шипение и усталость. FWIW, BBC использовала фильтры BW3, которые имеют повышенную характеристику мощности при кроссовере по сравнению с LR2 и LR4. Возможно, отсюда и идея провала в кроссовере, но для меня это новость, и я предпочитаю BW3 плоскую АЧХ.
Эрл Геддес говорит, что (наклонный) провал особенно подходит для твитеров с высокой дисперсией. Чем больше я узнаю о динамиках, тем больше я узнаю, что ВСЕ — это компромисс.
Infinia
Член
№14
- №14
пип пип .. старый смайлик эквалайзер … я говорю старина
ПитМак
Член
№15
- №15
BBC — Еда — Рецепты соусов
СкоттГ
Член
№16
- №16
система7 сказала:
Должен признаться, я думал, что BBC Dip представляет собой плавный спад частотной характеристики в 4 дБ по всему диапазону, о чем свидетельствует голос Троэлса Гравесена.
Нажмите, чтобы развернуть…
Би-би-си использовала 3 «основные» кривые компенсации, одна из них — конструкция Троэля. Я полагаю, что описываемый вами провал на самом деле использовался больше всего для настройки ближнего и дальнего поля.
Инженер Кит Гандри разработал кривую компенсации зоны присутствия.
Подробнее об этом можно прочитать здесь:
http://www.diyaudio.com/forums/multi-way/83755-what-meant-bbc-rise-8.html#post972549
Infinia
Член
ScottG сказал:
Би-би-си использовала 3 «основные» кривые компенсации, одна из них — конструкция Троэлса.
Нажмите, чтобы развернуть…
Троэлс работал на биба?
только 3? Я понимаю, что для каждого дизайна динамиков было по одному. Я боюсь давать им «ярлыки», считать их или решать, что было главным, а что второстепенным, — это большая проблема, приятель!
из всего, что я читал (много), в конечном счете, я говорю, что это все мифотворчество из прилипших.
Последнее редактирование:
08.2015 13:19
# 18
- # 18
кспв сказал:
Правда ли, что некоторые производители динамиков намеренно предусматривают так называемый «провал ВВС» в частотной характеристике своих динамиков.
Нажмите, чтобы развернуть…
Вы можете сами убедиться в измерениях Stereophile рекомендуемых 2,5- или 3-полосных динамиков на 2014 год. Я вижу общую тенденцию — падение примерно со 100 Гц до 1 кГц, за исключением YG Acoustics.
Vivid G1 Giya
[IMGDEAD]https://cdn.stereophile.com/images/archivesart/710Vigfig2. jpg[/IMGDEAD]
Wilson Audio Alexandria XLF
[IMGDEAD]https://cdn.stereophile.com/ images/113Walexfig2.jpg[/IMGDEAD]
YG Acoustics Соня 1.3
[IMGDEAD]https://cdn.stereophile.com/images/713YGS13fig05.jpg[/IMGDEAD]
Joseph Audio Perspective
[IMGDEAD]https://cdn.stereophile.com/images/614Jopefig4.jpg[/IMGDEAD ]
Sonus Faber Venere 2.5
[IMGDEAD]https://cdn.stereophile.com/images/1013SFV25fig4.jpg[/IMGDEAD]
Revel Performa3 F208
[IMGDEAD]https://cdn.stereophile.com/images /714R208fig4.jpg[/IMGDEAD]
Goldenear Aon2
[IMGDEAD]https://cdn.stereophile.com/images/1013Aon2fig3.jpg[/IMGDEAD]
СкоттГ
Член
# 19
- # 19
Инфиния сказал:
Троэлс работал на биба?
только 3? Я понимаю, что для каждого дизайна динамиков было по одному.
из всего, что я читал (много), в конечном счете, я говорю, что это все мифотворчество из прилипчивых.Нажмите, чтобы развернуть…
Хорошо, плохо сказано.
В конструкции Troels использовалась одна из основных кривых компенсации, используемых BBC.
Да, «провал BBC», вероятно, был «придуман» звуковым обозревателем.
На BBC, вероятно, диапазон 1–3,5/4 кГц назвали бы провалом Гандри или кривой/падением присутствия Харвуда.
Я думаю, что Харвуд (инженер Би-би-си) исследовал это примерно в то время, когда Блауэрт (академический докторант) был. Возможно, одно повлияло на другое.
сретен
Р.И.П.
#20
- #20
система7 сказала:
Эффективная факторизация произведения двух простых чисел выглядит интересно.
Как тяжело это может быть на самом деле?Нажмите, чтобы развернуть…
Привет,
Что ж, хорошо. Вы, кажется, не понимаете проблемы.
Если бы это было легко, криптография была бы фатально ошибочной.
Эффективного «крэка» к проблеме нет, вот в чем дело.
р-н, сретен.
Последнее редактирование:
Показать скрытый контент низкого качества
Вы должны войти или зарегистрироваться, чтобы ответить здесь.
Делиться:
Фейсбук
Твиттер
Реддит
Пинтерест
Тамблер
WhatsApp
Эл. адрес
Делиться
Ссылка на сайт
Чипсы тортилья и соус из фасоли
Назад к поиску
на испанском языке
Изображение рецепта
Делает: 4 порций
Общая стоимость: $$$$
Приготовьте этот многослойный соус с фасолью, сальсой, сметаной и сыром для следующей вечеринки. Сделайте свои собственные чипсы из тортильи, чтобы подавать на гарнир. Наполняйтесь клетчаткой, развлекаясь.
Ингредиенты
- 4 кукурузные тортильи
- 1 Можно фасоль (16 унций)
- 1/4 чашка сальса
- 1/4 чашка сметана, нежирная
- 1/2 чашка сыр чеддар (измельченный)
- 1 чашка латук (измельченный)
Указания
1. Разогрейте духовку до 400 градусов.
2. Сложите лепешки стопкой на разделочной доске. Острым ножом разрежьте стопку на восемь частей, сформировав треугольники или клинья.
3. Разложите кусочки тортильи в один слой на противне. Отложите в сторону, пока готовите соус.
4. Открытые консервированные бобы. Откиньте фасоль на дуршлаг; промыть и слить. Поместите фасоль в небольшую миску и разомните толкушкой для картофеля. Выложите фасоль на дно формы для запекания.
5. Отмерьте сальсу и распределите по фасоли.
6. Отмерьте сметану и распределите по фасоли.
7. Сыр натереть на терке и измерить; посыпать бобовой смесью.
8. Положите дольку салата на разделочную доску. Нарезать тонкими полосками; отложить.
9. Поместите противень с кусочками тортильи и соусом в предварительно разогретую духовку. Выпекайте около 8 минут или пока кусочки тортильи не станут хрустящими, а соус не начнет пузыриться. Посыпьте соус салатом и подавайте с чипсами из тортильи.
Изменения вкуса
— Используйте Монтерей Джек или другой сыр.
— Замените фасоль черной фасолью.
— Замените 1/4 стакана нарезанных свежих помидоров соусом тако.
— Выложите одну маленькую банку нарезанного зеленого перца чили на фасоль.
Источник:
Cooking Up Fun — Пирамида закусок
Cornell Cooperative Extension
Division of Nutritional Sciences
Информация о питании
Размер порции: 1/4 рецепта (200 г)
Показать полный экран Показывай меньше| Питательные вещества | Сумма |
|---|---|
| Всего калорий | 216 |
| Общий жир | 6 г |
| Насыщенные жиры | 3 г |
| Холестерин | 16 мг |
| Натрий | 190 мг |
| Углеводы | 30 г |
| Пищевые волокна | 7 г |
| Всего сахаров | 1 г |
| Добавленный сахар | 0 г |
| Белок | 12 г |
| Витамин D | 0 мкг |
| Кальций | 168 мг |
| Железо | 3 мг |
| Калий | 422 мг |
Н/Д — нет данных
| Питательные вещества | Сумма |
|---|---|
| Всего калорий | 216 |
| Общий жир | 6 г |
| Насыщенные жиры | 3 г |
| Мононенасыщенные жиры | 2 г |
| Полиненасыщенные жиры | 1 г |
| Линолевая кислота | 1 г |
| α-линоленовая кислота | 0,2 г |
| Омега 3 — EPA | 0 мг |
| Омега 3 — ДГК | 0 мг |
| Холестерин | 16 мг |
| Углеводы | 30 г |
| Пищевые волокна | 7 г |
| Всего сахаров | 1 г |
| Добавленный сахар | 0 г |
| Белок | 12 г |
| Минералы | |
| Кальций | 168 мг |
| Калий | 422 мг |
| Натрий | 190 мг |
| Медь | 225 мкг |
| Железо | 3 мг |
| Магний | 58 мг |
| Фосфор | 271 мг |
| Селен | 5 мкг |
| Цинк | 2 мг |
| Витамины | |
| Витамин А | 76 мкг РАЭ |
| Витамин B6 | 0,2 мг |
| Витамин B12 | 0,2 мкг |
| Витамин С | 3 мг |
| Витамин D | 0 мкг |
| Витамин Е | 0 мг |
| Витамин К | 22 мкг |
| Фолат | 110 мкг ДФЭ |
| Тиамин | 0,2 мг |
| Рибофлавин | 0,2 мг |
| Ниацин | 1 мг |
| Холин | 32 мг |
Примечание: на этом дисплее отображаются только доступные питательные вещества
Группы продуктов MyPlate
| Овощи | 1/2 чашки | |
| Зерновые | 1 унция | |
| Белковые продукты | 1 1/2 унции | |
| Молочная | 1/2 чашки |
Рецепты, которые могут вам понравиться
Просмотреть все рецепты (NASDAQ:SONO) Александр
Marketplace
Резюме
- Акции Sonos, производителя динамиков премиум-класса, упали почти на 30% по сравнению с краткосрочным августовским пиком.
- Компания по-прежнему демонстрирует значительный рост выручки выше 50% в годовом исчислении.
- В то же время валовая прибыль и скорректированная рентабельность по EBITDA также быстро растут.
- Ближайшее 10-процентное повышение цен может способствовать дальнейшему увеличению прибыли компании и лучшей защите компании от проблем с цепочкой поставок.
- Ищете портфолио подобных идей? Участники Daily Tech Download получают эксклюзивный доступ к нашему портфолио моделей. Узнать больше »
Lukasz Kochanek/iStock От редакции через Getty Images
Одним из лучших моментов широких рыночных коррекций для инвесторов, у которых значительная часть портфелей размещена в наличных деньгах и облигациях и которые могут воспользоваться падением, является тот факт, что Рынок склонен к распродажам довольно без разбора — хорошие, хорошо оцененные акции падают вместе с высококлассными акциями без фундаментальных факторов, поддерживающих их рост. Sonos (NASDAQ:SONO), производитель высококачественных домашних динамиков, является одним из самых привлекательных недавних инвесторов, в которые могут инвестировать средства сознательные инвесторы.
Компания Sonos за последние несколько лет приобрела широкую известность. Как и большинство компаний, производящих технологические продукты, компания построила свой бренд на флагманском домашнем акустическом устройстве высокого класса. Однако в последние годы Sonos вышла на массовый рынок благодаря партнерству с такими ритейлерами, как IKEA. Эта стратегия, а также постоянное расширение портфеля продуктов Sonos позволили компании захватить гораздо более широкую сеть и добиться значительного роста доходов.
До недавнего времени рынок лелеял историю роста Sonos. В какой-то момент в этом году акции Sonos выросли вдвое с начала 2021 года и стоили 20 долларов. Однако с тех пор акции Sonos упали почти на 30% по сравнению с краткосрочными августовскими пиками выше 40 долларов. Это падение, на мой взгляд, дает инвесторам своевременную возможность купить высококачественные акции во время временной передышки в цене.
Данные YCharts
Повторный взгляд на бычий тезис и оценку Sonos
Я особенно уверен в Sonos, поскольку падение цен на акции компании сопровождалось сохранением сильных фундаментальных показателей. Результаты Sonos за третий финансовый квартал, которые мы рассмотрим в следующем разделе, продемонстрировали не что иное, как достижение компанией своих амбициозных целей: рост выручки выше 50% в годовом исчислении и достижение значительного увеличения валовой прибыли наряду с двузначным показателем. корректировка прибыли по EBITDA.
Единственное, что может тяготить Sonos, — это признание трудностей с цепочкой поставок. Как и практически любая другая компания в ряде отраслей, от Peloton (PTON) до Ford (F), Sonos испытывает трудности с поиском достаточного количества чипов для своей продукции. В качестве временной передышки в этой сложной ситуации Sonos в сентябре повысила цены на 10% для большей части своего портфеля. Хотя изменение цен, безусловно, сопряжено с риском, мы считаем, что влияние на общий рост Sonos не будет отрицательным и, безусловно, поможет компании продолжать увеличивать валовую прибыль.
Вот напоминание о том, что я считаю ключевыми движущими силами бычьего тезиса для Sonos:
- Относительно низкое общее проникновение на рынок. Прогноз выручки Sonos на 2021 год предполагает, что компания захватит только 9% рынка домашней аудиосистемы премиум-класса стоимостью 18 миллиардов долларов. Учитывая премиальный бренд Sonos за высококачественный звук и постоянный выпуск новых продуктов, я думаю, что у Sonos все еще есть возможности для завоевания все большей и большей доли рынка.
- Тематическое соответствие домашним развлечениям. Одним из крупнейших победителей в категории в 2020 году в условиях пандемии стало потоковое вещание. Netflix (NFLX) и Disney+ (DIS) усилили конкуренцию на фоне всплеска интереса к потоковому вещанию в прошлом году. Наряду со спросом на потоковую передачу возник повышенный спрос на периферийные устройства, такие как домашние колонки. Поскольку эта тенденция сохраняется, Sonos только выигрывает.
- Расширение канала. Одним из наиболее привлекательных аспектов Sonos является то, что он имеет широкий охват рынка благодаря агрессивному канальному маркетингу. За последний год одним из самых больших факторов роста для Sonos стал успех ее продукции под брендом IKEA (колонка для книжной полки SYMFONISK стоит всего 9 долларов).9), что дает Sonos лидерство на рынке начального уровня.
- Профиль границы застройки. Sonos добилась значительного увеличения валовой прибыли за счет благоприятного ассортимента продукции, снижения тарифных издержек и большей экономии за счет масштаба. Его валовая прибыль ~ 50% завидна среди поставщиков оборудования. Он также все больше и больше полагается на распродажи по полной цене, а не на скидки.
Отметим также, что Sonos недавно повысил прогноз на весь год. Сейчас компания ориентируется на $1,69.5-$1,71 млрд выручки и $270-$280 млн скорректированной EBITDA: значительный рост по сравнению с $1,625-1,675 млрд выручки и $225-280 млн скорректированной EBITDA ранее:
Рисунок 1. Прогноз Sonos на 21 финансовый год.
Презентация доходов Sonos за третий квартал
Прямо сейчас, при текущей цене акций около 31 доллара, рыночная капитализация Sonos составляет 3,99 миллиарда долларов. После вычета 670,9 млн долларов денежных средств из последнего балансового отчета Sonos итоговая стоимость компании в размере составляет 3,32 млрд долларов. Это дает компании оценку всего в 12,1x скорректированный EV/22 EBITDA, что является невероятно скромным мультипликатором для компании, которая все еще увеличивает выручку при ожидаемом >30% г/г за год.
Мы также отмечаем, что через три года, в 24 финансовом году, Sonos ожидает выручку в размере $2,25 млрд при скорректированной марже EBITDA на уровне 15-18%. Средняя точка этого профиля маржи подразумевает скорректированную EBITDA в размере 371,3 млн долларов, что означает, что текущая оценка компании составляет всего ~ 8,9.x, что долгосрочный прогноз EBITDA.
Суть в том, что в Sonos есть много преимуществ, которые можно открыть, и инвесторы, покупающие сейчас, могут воспользоваться очень скромной оценкой, подкрепленной подтвержденной чистой прибылью.
Q3 загрузить
Теперь давайте более подробно рассмотрим результаты Sonos за последний финансовый квартал, который для Sonos заканчивается в начале июля. Сводка доходов за третий квартал представлена ниже:
Рисунок 2. Результаты Sonos за третий квартал
Презентация доходов Sonos за третий квартал
Выручка Sonos за третий квартал выросла на ошеломляющие 52% в годовом исчислении до 378,7 млн долларов, превзойдя ожидания Уолл-стрит в размере 315,2 млн долларов (+26% в годовом исчислении) на целых 26 пунктов. поле. Обратите внимание, что это второй квартал подряд, когда фактический рост выручки Sonos примерно в 2 раза превышает ожидания Уолл-стрит, что свидетельствует о том, насколько консервативно Sonos стремится руководствоваться и насколько сдержанными являются ожидания для этой компании.
Менеджмент отмечает, что проблемы с цепочками поставок, более длительные сроки выполнения заказов и расширенные расценки клиентов теперь являются частью повседневной реальности Sonos. Однако генеральный директор Патрик Спенс отмечает, что клиенты были терпеливы. Sonos рассчитывает выйти из 21 финансового года со значительным объемом невыполненных работ (что приведет к увеличению выручки в 22 финансовом году и станет драйвером роста в следующем году).
В соответствии с подготовленными замечаниями генерального директора Спенса по последнему отчету о прибылях и убытках за третий квартал (ключевые моменты выделены):
Наш пересмотренный в сторону повышения прогноз предполагает рост выручки примерно на 30 % во второй половине 2021 финансового года с поправкой на дополнительную неделю в прошлом году. , по сравнению с нашим предыдущим прогнозом роста на 20%. Это сопоставимо с ростом на 33%, который мы добились в первой половине года, несмотря на то, что ограничения цепочки поставок, которые широко распространены в нашем секторе, все больше влияют на наши усилия по удовлетворению постоянно растущего спроса на нашу продукцию.
К счастью, наши клиенты проявили как терпение, так и лояльность, их готовность ждать нашу продукцию, пока мы продолжаем работать над ее поставками, действительно подчеркивает силу нашего системного подхода и нашего бренда.
На данный момент мы ожидаем, что закончим 2021 финансовый год со значительным отставанием, которое, как мы ожидаем, будет сокращено в 2022 финансовом году. Учитывая исключительную динамику, которую мы испытываем, и непоколебимый спрос на нашу продукцию. W e опережают график в достижении наших целей на 2024 финансовый год, изложенных на нашем мероприятии для инвесторов в марте, и находятся на пути к тому, что, по нашему мнению, будет многообещающим финансовым годом 2022». наслаждался успешным запуском своего нового продукта Roam, портативной умной колонки за 179 долларов, и этот запуск дополняет и без того загруженную дорожную карту продукта в этом году, в рамках которой были выпущены новые совместные продукты с существующими партнерскими отношениями Sonos с Audi и IKEA.0003
Sonos также продемонстрировала значительное увеличение валовой прибыли в третьем квартале до 47,0% и увеличение на 300 базисных пунктов в годовом исчислении.
Рисунок 3. Валовая прибыль Sonos
Презентация прибыли Sonos за третий квартал
Скорректированный показатель EBITDA также значительно вырос в этом квартале. Как видно на диаграмме ниже, Sonos достигла скорректированной EBITDA в размере 46,7 млн долларов США за квартал по сравнению с убытком в размере -2,7 млн долларов США в квартале прошлого года. Рентабельность компании по скорректированному показателю EBITDA, составившая 12% в этом квартале, представляет собой значительное улучшение на 13 пунктов по сравнению с предыдущим годом.
Рисунок 4. Скорректированная EBITDA Sonos
Представление прибыли Sonos за третий квартал
С начала года скорректированная EBITDA Sonos в размере $261,5 млн также выросла более чем в 4 раза по сравнению с предыдущим годом. Мы отмечаем, что даже сейчас прогноз Sonos на 21 финансовый год, предусматривающий скорректированную EBITDA всего в $270–280 млн, с большой долей вероятности будет нарушен, поскольку мы не думаем, что Sonos может получить лишь $10–20 млн корректировки. EBITDA в четвертом квартале (против $46,5 млн в четвертом квартале прошлого года).
Основные выводы
Sonos упала в натуральной форме вместе с остальным рынком за последний месяц, но инвесторам было бы разумно использовать это падение как возможность для покупки в очень сильной компании по производству потребительских товаров, которая имеет историю сбалансированного роста, постоянное обновление продукта и увеличение прибыли. Оставайся здесь надолго.
Подпишитесь на Daily Tech Download, чтобы быть в курсе того, как меняется стоимость акций технологических компаний, а также получать эксклюзивные подробные идеи и прямой доступ к Гэри Александру.
Автор этой статьи:
Гэри Александр
24,26 тыс. подписчиков
Автор Daily Tech Download
Кураторское исследование высокопроизводительных технологий; прибыльные сделки закрываются ежемесячно
Обладая совместным опытом работы в технологических компаниях на Уолл-стрит и работы в Силиконовой долине, а также выступая в качестве внешнего консультанта для нескольких стартапов, Гэри Александер знаком со многими темами, формирующими отрасль сегодня. Он является постоянным автором Seeking Alpha с 2017 года. Его цитируют во многих веб-публикациях, а его статьи размещаются на страницах компаний в популярных торговых приложениях, таких как Robinhood.
Раскрытие информации: У меня/нас есть выгодная длинная позиция по акциям SONO посредством владения акциями, опционов или других деривативов. Я написал эту статью сам, и она выражает мое собственное мнение.
Комментарии (26)
Рекомендуется для вас
Чтобы этого не произошло в будущем, включите Javascript и файлы cookie в своем браузере.
Часто ли это происходит с вами? Пожалуйста, сообщите об этом на нашем форуме обратной связи.
Если у вас включен блокировщик рекламы, вам может быть заблокировано продолжение. Пожалуйста, отключите блокировщик рекламы и обновите страницу.
Справочник по оборудованию ESP32-LyraT V4.3 — Документация по платформе разработки аудио
В этом руководстве представлены функциональные описания и параметры конфигурации платы разработки аудио ESP32-LyraT V4.3. В качестве введения в функциональность и использование LyraT см. Руководство по началу работы с ESP32-LyraT V4.3. Проверьте раздел «Другие версии LyraT», если у вас другая версия платы.
В этом разделе
Обзор
Функциональное описание
Опции настройки оборудования
Включить карту MicroSD в режиме 1-wire
Включить карту MicroSD в 4-проводном режиме
Включить JTAG
Использование автоматической загрузки
Назначение выводов ESP32
Распиновка разъемов расширения
Разъем UART/JP2
Заголовок I2S / JP4
Заголовок I2C / JP5
Разъем JTAG/JP7
Примечания по распределению электроэнергии
Разделение источника питания
Три специализированных LDO
Отдельный источник питания для усилителей мощности
Выбор аудиовыхода
Другие версии LyraT
Связанные документы
Плата для разработки ESP32-LyraT представляет собой аппаратную платформу, предназначенную для двухъядерных аудиоприложений ESP32, например, аудиодинамиков Wi-Fi или BT, речевых пультов дистанционного управления, умных домашних устройств с аудиофункциями и т.
На приведенной ниже блок-схеме представлены основные компоненты ESP32-LyraT.
ESP32-LyraT V4.3 Электрическая блок-схема
В следующем списке и на рисунке описаны основные компоненты, интерфейсы и элементы управления платы ESP32-LyraT.
- Модуль ESP32-WROVER-E
Модуль ESP32-WROVER-E содержит чип ESP32 для обеспечения подключения Wi-Fi/Bluetooth и мощности обработки данных, а также интегрирует 4 МБ внешней флэш-памяти SPI и дополнительную 8 МБ PSRAM для гибкости. хранилище данных.
- Зеленый светодиод
Светодиод общего назначения, управляемый модулем ESP32-WROVER-E , чтобы указать определенные рабочие состояния аудиоприложения с использованием специального API.
- DIP-переключатель функций
Используется для настройки функций контактов GPIO12–GPIO15, которые являются общими для устройств, в основном между разъемом JTAG и картой MicroSD .
- Заголовок JTAG
Обеспечивает доступ к интерфейсу JTAG модуля ESP32-WROVER-E . Его можно использовать для отладки, загрузки приложений, а также для реализации ряда других функций, например, трассировки на уровне приложений. См. Заголовок JTAG / JP7 для деталей распиновки. Перед использованием Сигналы JTAG в заголовок, Функция DIP Switch должна быть включена. Обратите внимание, что когда JTAG работает, карта MicroSD Card не может использоваться и должна быть отключена, поскольку некоторые сигналы JTAG используются обоими устройствами.
- Разъем UART
Последовательный порт: обеспечивает доступ к последовательным сигналам TX/RX между модулем ESP32-WROVER-E и чипом моста USB-UART .
- Заголовок I2C
Обеспечивает доступ к интерфейсу I2C. К этому интерфейсу подключены модуль ESP32-WROVER-E и чип аудиокодека . См. Заголовок I2C / JP5 для получения подробной информации о распиновке.
- Слот MicroSD
Отладочная плата поддерживает карты MicroSD в режимах SPI/1-bit/4-bit и может хранить или воспроизводить аудиофайлы на карте MicroSD. Обратите внимание, что JTAG не может использоваться и должен быть отключен путем установки функционального DIP-переключателя , когда Карта MicroSD работает, поскольку некоторые сигналы используются обоими устройствами.
- Заголовок I2S
Обеспечивает доступ к интерфейсу I2S.
- Левый микрофон
Встроенный микрофон, подключенный к IN1 микросхемы аудиокодека .
- Вспомогательный вход
Дополнительный входной разъем, подключенный к IN2 (левый и правый каналы) чипа аудиокодека . Для подключения к этому разъему используйте стереоразъем 3,5 мм.
- Выход для наушников
Выходной разъем для подключения наушников со стереоразъемом 3,5 мм.
Примечание
Розетка может использоваться с гарнитурами для мобильных телефонов и совместима только с гарнитурами стандарта OMPT. Он работает с гарнитурами CTIA. См. Телефонный разъем (аудио) в Википедии.
Схема платы ESP32-LyraT V4.3
- Правый микрофон
Встроенный микрофон, подключенный к IN1 чипа аудиокодека .
- Выход левого динамика
Выходной разъем для подключения динамика. Рекомендуется динамик 4 Ом и 3 Вт. Штифты имеют шаг 2,00 мм / 0,08 дюйма.
- Выход правого динамика
Выходной разъем для подключения динамика. Рекомендуется динамик 4 Ом и 3 Вт. Штифты имеют шаг 2,00 мм / 0,08 дюйма.
- Чип PA
Усилитель мощности, используемый для усиления стереофонического аудиосигнала от чипа аудиокодека для управления двумя динамиками.
- Boot/Reset Нажмите клавиши
Кнопка загрузки: удерживая нажатой кнопку Boot и кратковременно нажав кнопку Reset , чтобы запустить режим загрузки прошивки. Затем вы можете загрузить прошивку через последовательный порт. Кнопка сброса: одно только нажатие этой кнопки приводит к сбросу системы.
- Кнопки сенсорной панели
Четыре сенсорные панели с маркировкой Play , Sel , Vol+ и Vol- .
- Микросхема аудиокодека
Микросхема аудиокодека ES8388 представляет собой маломощный стереофонический аудиокодек с усилителем для наушников. Он состоит из 2-канального АЦП, 2-канального ЦАП, микрофонного усилителя, усилителя для наушников, цифровых звуковых эффектов, аналогового микширования и функций усиления. Сопряжен с 9Модуль 1043 ESP32-WROVER-E по шинам I2S и I2S для аппаратной обработки звука независимо от аудиоприложения.
- Автоматическая загрузка
Установите три перемычки на этом разъеме, чтобы включить автоматическую загрузку приложения в ESP32. Установите все перемычки вместе на все три коллектора. Удалите все перемычки после завершения загрузки.
- Клавиши функционального нажатия
Две клавиши с маркировкой Rec и Mode .
- Мост USB-UART
Одночиповый мост USB-UART обеспечивает скорость передачи данных до 1 Мбит/с.
- Порт USB-UART
Функционирует как интерфейс связи между ПК и модулем ESP32.
- USB-порт питания
Обеспечивает питание платы.
- Индикаторы режима ожидания/зарядки
Зеленый индикатор режима ожидания указывает на подачу питания на порт Micro USB . Красный светодиод Зарядка указывает на то, что аккумулятор, подключенный к разъему для аккумулятора , заряжается.
- Гнездо батареи
Гнездо с двумя контактами для подключения одноэлементной литий-ионной батареи.
Примечание
Пожалуйста, проверьте, соответствует ли полярность на вилке аккумулятора полярности разъема, как отмечено на маске для пайки платы, кроме разъема.
- Чип зарядного устройства
Линейное зарядное устройство постоянного тока и постоянного напряжения для одноэлементных литий-ионных аккумуляторов AP5056. Используется для зарядки аккумулятора, подключенного к гнезду аккумулятора через порт Micro USB .
- Светодиод включения питания
Красный светодиод, указывающий на то, что Переключатель включения питания включен.
Примечание
Выключатель питания не влияет на зарядку литий-ионного аккумулятора и не отключает его.
- Выключатель питания
Ручка включения/выключения питания: переключение влево включает плату; переключение вправо выключает плату.
Параметры настройки оборудования
Существует несколько вариантов изменения аппаратной конфигурации платы ESP32-LyraT. Опции выбираются с помощью функционального DIP-переключателя .
Включить карту MicroSD в режиме 1-wire
DIP-переключатель
Должность
1
ВЫКЛ
2
ВЫКЛ
3
ВЫКЛ
4
ВЫКЛ
5
ВЫКЛ
6
ВЫКЛ
7
ВЫКЛ 1
8
нет данных
Обнаружение входа AUX может быть включено переключением DIP SW 7 в положение ON . Обратите внимание, что сигнальный контакт AUX Input не должен быть подключен при включении системы. В противном случае ESP32 может не загрузиться правильно.
В этом режиме:
Включить карту MicroSD в 4-проводном режиме
ПО DIP
Должность
1
ПО
2
ПО
3
ВЫКЛ
4
ВЫКЛ
5
ВЫКЛ
6
ВЫКЛ
7
ВЫКЛ
8
нет данных
В этом режиме:
Функциональность JTAG недоступна
Vol- Сенсорная кнопка недоступна для использования с API
Вход AUX обнаружение через API недоступно
Включить JTAG
ПО DIP
Должность
1
ВЫКЛ
2
ВЫКЛ
3
ПО
4
ПО
5
ПО
6
ПО
7
ПО
8
нет данных
В этом режиме:
Карта MicroSD функциональность недоступна, извлеките карту из слота
Vol- Сенсорная кнопка недоступна для использования с API
Вход AUX обнаружение через API недоступно
Использование автоматической загрузки
Ввод ESP32 в режим загрузки может быть выполнен двумя способами:
Вручную, нажав обе клавиши Boot и RST , а затем отпустив сначала RST , а затем Boot .
Автоматически с помощью программного обеспечения, выполняющего загрузку. Программное обеспечение использует сигналы последовательного интерфейса DTR и RTS для управления состояниями контактов EN , IO0 и IO2 ESP32. Эта функция активируется установкой перемычек в три разъема JP23 , JP24 и JP25 . Подробнее см. на схеме ESP32 LyraT V4.3. Удалите все перемычки после завершения загрузки.
Распределение контактов ESP32
Несколько контактов модуля ESP32 выделены для встроенного оборудования. Некоторые из них, такие как GPIO0 или GPIO2, имеют несколько функций. Подробную информацию см. в таблице ниже или на схеме ESP32 LyraT V4.3.
Контакт GPIO
Тип
Определение функции
SENSOR_VP
я
Аудио Запись (PB)
SENSOR_VN
я
Аудио Режим (PB)
IO32
Ввод/вывод
Аудио Комплект (TP)
IO33
Ввод/вывод
Аудио Воспроизведение (TP)
IO27
Ввод/вывод
Аудио Том+ (TP)
IO13
Ввод/вывод
ДЖТАГ МТКК , МикроСД Д3 , Аудио Том- (ТП)
IO14
Ввод/вывод
ДЖТАГ МТМС , МикроСД КЛК
IO12
Ввод/вывод
JTAG MTDI , MicroSD D2 , вспомогательный сигнал обнаруживает
IO15
Ввод/вывод
ДЖТАГ МТДО , МикроСД КМД
IO2
Ввод/вывод
Автоматическая загрузка, MicroSD D0
IO4
Ввод/вывод
MicroSD D1
IO34
я
Вставка MicroSD Обнаружение
IO0
Ввод/вывод
Автоматическая загрузка, I2S MCLK
IO5
Ввод/вывод
I2S SCLK
IO25
Ввод/вывод
I2S LRCK
IO26
Ввод/вывод
I2S DSDIN
IO35
я
I2S ASDOUT
IO19
Ввод/вывод
Гнездо для наушников обнаружить
IO22
Ввод/вывод
Зеленый светодиодный индикатор
IO21
Ввод/вывод
PA Включить выход
IO18
Ввод/вывод
I2C SDA
IO23
Ввод/вывод
I2C СКЛ
(TP) — сенсорная панель
(ПБ) — кнопка
Примечания по распределению электроэнергии
Плата имеет довольно разветвленную систему распределения питания.
Разделение источника питания
Основной источник питания 5 В и обеспечивается через USB. Вторичный источник питания составляет 3,7 В и обеспечивается дополнительной батареей. Само питание USB подается по специальному кабелю, отдельному от кабеля USB, используемого для загрузки приложений. Чтобы еще больше уменьшить шум от USB, вместо USB можно использовать батарею.
ESP32 LyraT V4.3 — Разделение блока питания
Три специализированных LDO
Модуль ESP32
Чтобы обеспечить достаточный ток ESP32, макетная плата использует LDO LD1117S33CTR, способный обеспечить максимальный выходной ток 800 мА.
ESP32 LyraT V4.3 — выделенный LDO для модуля ESP32
Карта MicroSD и Аудиокодек
Для карты MicorSD и аудиокодека предусмотрены два отдельных LDO.
ESP32 LyraT V4.3 — специальный LDO для карты MicroSD
Отдельный источник питания для усилителей мощности
Блок аудиоусилителя состоит из двух NS4150, которым требуется большой источник питания для питания внешних динамиков с максимальной выходной мощностью 3 Вт. Питание на обе УМ подается напрямую от аккумулятора или USB. Отладочная плата добавляет набор LC-цепей в передней части источника питания усилителя мощности, где L использует магнитные шарики на 1,5 А, а C использует алюминиевые электролитические конденсаторы на 10 мкФ, чтобы эффективно отфильтровывать перекрестные помехи питания.
ESP32 LyraT V4.3 — блок питания для усилителей мощности
Выбор аудиовыхода
В макетной плате используются две микросхемы моноусилителя класса D, номер модели NS4150, с максимальной выходной мощностью 3 Вт и рабочим напряжением от 3,0 В до 5,25 В.
Источником аудиовхода является выход цифро-аналогового преобразователя (ЦАП) ES8388. Аудиовыход поддерживает два внешних динамика.
Дополнительный аудиовыход представляет собой пару наушников, питаемых от тех же ЦАП, что и интегральные схемы усилителя.
Для переключения между использованием наушников и динамиков плата обеспечивает цифровой входной сигнал для определения наличия разъема для наушников и цифровой выходной сигнал для включения или отключения интегральных схем усилителя. Другими словами, выбор между динамиками и наушниками осуществляется программным управлением, а не механическими контактами, которые отключают динамики при подключении разъема для наушников.
ESP32-LyraT V4.2 Руководство по началу работы
ESP32-LyraT V4 Руководство по началу работы
Падение щепы после избытка предложения? Micron и Nvidia падают, так как производители полупроводников говорят об ухудшении рынков
Micron и Nvidia последними из производителей полупроводников предупреждают об ослаблении спроса.После того, как нехватка микрочипов, вызванная глобальной пандемией, ограничила цепочки поставок в последние годы, могут ли инвесторы увидеть начало падения чипов?
Это может вызывать беспокойство, поскольку во вторник другой производитель чипов опубликовал предупреждение о доходах и рыночных условиях, всего через день после того, как Nvidia (NVDA) опубликовала нечто подобное.
В заявлении регулирующих органов производитель чипов Micron Technology (MU) заявил, что ожидает «сложных» рыночных условий в течение следующих двух кварталов с доходом в текущем квартале «на уровне или ниже» 6,8 млрд долларов (5,6 млрд фунтов стерлингов, 6,6 млрд евро). Прогноз на июнь — $7,6 млрд.
Цена акций Micron Technology (MU)
На предрыночных торгах во вторник акции упали на 3%. С начала года акции Micron упали на 36%.
«В последнее время из-за макроэкономических факторов и ограничений цепочки поставок мы наблюдаем расширение корректировок запасов клиентов», — говорится в заявлении Micron.
Компания Micron, основанная в 1978 году, производит микросхемы памяти и накопители данных под брендами Crucial, Ballistix и частными торговыми марками. Ассортимент продукции компании включает микросхемы динамической памяти с произвольным доступом (DRAM), микросхемы статической памяти с произвольной выборкой (SRAM), флэш-память и USB-накопители.
Micron Technology
В отличие от других технологических компаний, базирующихся в Силиконовой долине, Micron базируется в Айдахо, штате США, более известном своими картофельными чипсами, а не кремниевыми.
Заявка была опубликована всего за несколько часов до того, как руководители Micron должны появиться на конференции инвесторов.
Это второе предупреждение от производителя микросхем. В прошлом месяце генеральный директор Micron подчеркнул замедление спроса.
«Существует встречный ветер, связанный с потребительским спросом и запасами, влияющий на отрасль и, следовательно, на наш финансовый прогноз на четвертый квартал», — заявил президент и главный исполнительный директор Micron Санджай Мехротра.
Согласно техническому веб-сайту Tom’s Hardware, такие компании, как Apple (AAPL), Nvidia и AMD (AMD), сократили заказы на производство чипов на фоне замедления потребительского спроса.
Что вы думаете о MU?
Бычий
или
Медвежий
Голосуйте, чтобы увидеть настроения трейдеров!
Настроение рынка:
Бычий Медвежий
88% 12%
Вы проголосовали за бычий.
Вы проголосовали за медведей.
Попробовать MU
Начать торговать
или
Попробовать демо
Цена акций Apple (AAPL)
В июне отраслевая исследовательская компания Gartner сообщила, что поставки ПК в этом году сократятся на 9,5%, а поставки смартфонов — на 5,8%.
Shutterstock
Компания Micron должна отчитаться о доходах за четвертый финансовый квартал в сентябре.
Видеокарты
В понедельник Nvidia заявила, что выручка за текущий квартал будет ниже ее ожиданий из-за слабости игрового сегмента.
Акции Nvidia после обновления упали на 6%. С начала года акции упали на 43%.
Цена акций Nvidia (NVDA)
«Мы думаем, что у Nvidia может быть несколько сложных кварталов, которые могут создать более привлекательную точку входа. Тем не менее, мы считаем, что долгосрочные инвесторы могут обнаружить, что акции Nvidia с широким рвом начинают выглядят привлекательными, поскольку мы ожидаем, что бизнес центров обработки данных фирмы окажется более устойчивым к макроэкономическим препятствиям», — написал в заметке аналитик Morningstar Абхинав Давулури.
«Ожидается, что выручка во втором квартале составит примерно 6,70 млрд долларов, что на 19% ниже% последовательно … в первую очередь отражает более слабый, чем прогнозировалось, доход от игр», — говорится в заявлении компании.
«Наши прогнозы по сквозным продажам игровых продуктов значительно снизились в течение квартала», — говорится в заявлении генерального директора Nvidia Дженсена Хуанга.
Санта-Клара, штат Калифорния Компания Nvidia со штаб-квартирой известна своей линейкой видеокарт серий RTX и GTX, используемых в видеоиграх. Она также производит микросхемы и оборудование, используемые для высокопроизводительных вычислений в центрах обработки данных, а также оборудование для передачи данных.
Видеокарты были в дефиците во время пандемии Covid-19, поскольку бум майнинга криптовалюты лишил их поставок из рук видеогеймеров. Поскольку криптоиндустрия переживает «зиму», производители видеокарт не могут продавать столько карт премиум-класса по высоким ценам, поскольку избыток бывших в употреблении видеокарт ударил по вторичным потребительским рынкам.
Nvidia опубликует полную прибыль за второй квартал 24 августа.
Геополитическая напряженность
Еще одним поводом для беспокойства для сектора чипов могут быть угрозы Китая Тайваню, стране, в которой расположено множество производственных предприятий, жизненно важных для мировых поставок чипов, на которых работают компьютеры, автомобили и смартфоны.
