Что такое энкодер и для чего он используется. Какие бывают виды энкодеров. Как работает энкодер и из чего состоит. Где применяются энкодеры в промышленности и технике.
Что такое энкодер и для чего он нужен
Энкодер (от англ. encoder — кодировщик) — это электромеханическое устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота, положение, скорость и направление вращения.
Основные задачи, которые решает энкодер:
- Измерение угла поворота вала
- Определение направления вращения
- Подсчет количества оборотов
- Измерение скорости вращения
- Определение положения вала относительно начальной точки
Энкодер является важным элементом систем обратной связи в приводах и механизмах, где требуется точный контроль положения, скорости или направления движения.
Принцип работы энкодера
Как работает энкодер? Принцип действия энкодера основан на преобразовании механического движения в последовательность электрических импульсов. Упрощенно это можно представить следующим образом:

- На вал устройства крепится диск с нанесенными метками (прорезями, магнитными полосами и т.д.)
- При вращении вала диск проходит через датчик (оптический, магнитный)
- Датчик генерирует электрические импульсы при прохождении меток
- Электронная схема преобразует импульсы в цифровой код
- Код обрабатывается и передается в систему управления
Количество импульсов соответствует углу поворота, а их последовательность — направлению вращения. Частота импульсов позволяет определить скорость.
Основные виды энкодеров
По принципу действия энкодеры делятся на два основных типа:
1. Инкрементальные энкодеры
Выдают последовательность импульсов при вращении. Позволяют определить:
- Угол поворота (по количеству импульсов)
- Направление вращения (по сдвигу фаз между каналами)
- Скорость (по частоте импульсов)
Недостаток — теряют информацию о положении при отключении питания.
2. Абсолютные энкодеры
Выдают уникальный цифровой код для каждого углового положения. Преимущества:
- Определяют точное положение даже после отключения питания
- Не требуют поиска начального положения при включении
- Менее чувствительны к помехам и вибрациям
Какой тип энкодера выбрать? Это зависит от требований конкретной задачи. Инкрементальные проще и дешевле, абсолютные — точнее и надежнее.
Технологии, применяемые в энкодерах
По используемой технологии различают следующие виды энкодеров:
Оптические энкодеры
Принцип действия основан на прерывании светового потока прорезями на вращающемся диске. Преимущества:
- Высокая точность и разрешающая способность
- Широкий диапазон скоростей
- Нечувствительность к электромагнитным помехам
Недостаток — чувствительность к загрязнениям и вибрациям.
Магнитные энкодеры
Используют эффект Холла для считывания магнитных меток. Преимущества:
- Высокая надежность в сложных условиях
- Нечувствительность к загрязнениям
- Компактные размеры
Недостаток — меньшая точность по сравнению с оптическими.
Механические энкодеры
Работают на замыкании/размыкании контактов. Преимущества:
- Простота конструкции
- Низкая стоимость
- Высокая надежность
Недостатки — низкая скорость работы, подверженность износу.
Области применения энкодеров
Где используются энкодеры? Основные сферы применения:
- Робототехника — для определения положения звеньев манипуляторов
- Станки с ЧПУ — контроль положения рабочих органов
- Лифты — определение положения кабины
- Конвейерные линии — контроль скорости движения ленты
- Упаковочное оборудование — синхронизация движений механизмов
- Антенные системы — позиционирование антенн
- Автомобильная техника — датчики положения педалей, руля и т.д.
Энкодеры стали неотъемлемой частью современных систем автоматизации и управления движением в самых разных отраслях промышленности.
Ключевые характеристики энкодеров
При выборе энкодера важно учитывать следующие параметры:
Разрешение
Сколько импульсов выдает энкодер за один оборот? Чем выше разрешение, тем точнее измерения. Типичные значения — от 100 до 10000 импульсов на оборот.
Максимальная скорость вращения
До какой скорости энкодер способен корректно работать? Обычно это от 1000 до 6000 об/мин.
Максимальная частота выходного сигнала
Определяет быстродействие энкодера. Типичные значения — от 100 кГц до 1 МГц.
Диаметр вала
От него зависит способ крепления энкодера. Стандартные размеры — 4, 6, 8, 10 мм.
Степень защиты
Устойчивость к внешним воздействиям по стандарту IP. Например, IP54, IP65.
Правильный выбор этих параметров обеспечит оптимальную работу энкодера в конкретных условиях применения.
Особенности монтажа и подключения энкодеров
При установке и подключении энкодеров следует учитывать ряд важных моментов:
Крепление энкодера
Как правильно закрепить энкодер? Существует несколько способов:
- Непосредственно на вал механизма (для энкодеров с полым валом)
- Через соединительную муфту (для компенсации несоосности)
- На кронштейне с помощью фланца
Важно обеспечить точное центрирование и отсутствие люфтов.

Электрическое подключение
На что обратить внимание при подключении энкодера?
- Соблюдение полярности питания
- Правильное подключение сигнальных проводов
- Экранирование кабеля для защиты от помех
- Использование согласующих резисторов на концах линии
Ошибки при подключении могут привести к некорректной работе или выходу энкодера из строя.
Настройка и калибровка
После монтажа может потребоваться настройка энкодера:
- Установка начального положения (для абсолютных энкодеров)
- Калибровка для компенсации погрешностей
- Настройка параметров выходного сигнала
Правильная настройка обеспечит максимальную точность измерений.
Преимущества и недостатки энкодеров
Какие плюсы и минусы имеют энкодеры по сравнению с другими датчиками положения?
Преимущества:
- Высокая точность измерений
- Широкий диапазон измеряемых скоростей
- Простота интеграции в цифровые системы
- Возможность определения направления вращения
- Долговечность и надежность (для бесконтактных типов)
Недостатки:
- Относительно высокая стоимость
- Чувствительность к механическим воздействиям
- Необходимость точной установки и настройки
- Потребность в электропитании
Несмотря на некоторые недостатки, преимущества энкодеров делают их незаменимыми во многих областях техники.

Энкодеры – назначение, виды, характеристики
Что такое энкодер
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
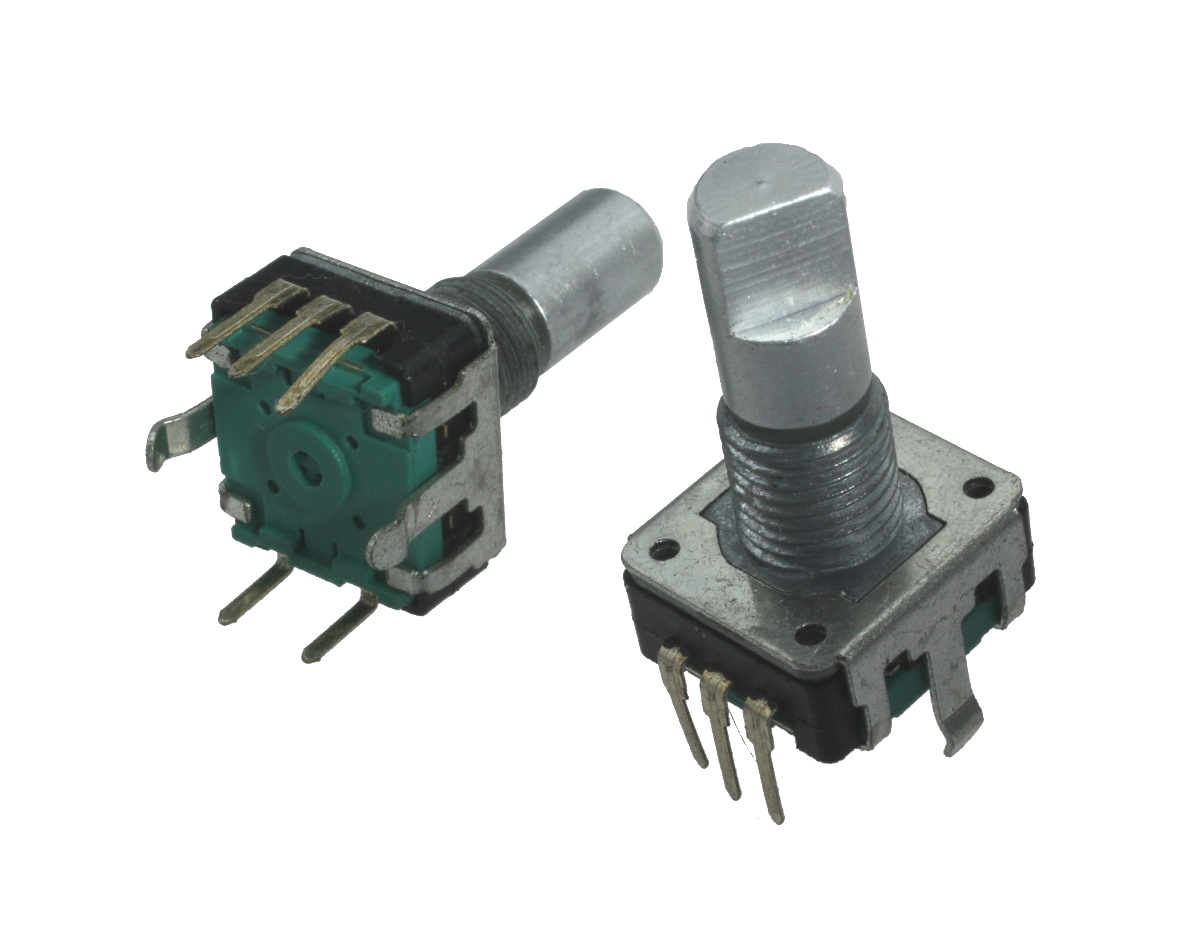
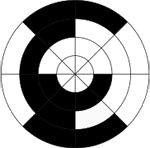
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.

Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
Прочие параметры:
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Подключение
В простейшем случае, если позволяет ситуация, выход энкодера можно подключить ко входу счетчика и запрограммировать его на измерение скорости.
Но, как правило, энкодер используется совместно с контроллером. К контроллеру подключаются все необходимые выходы, и его программа рассчитывает скорость, ускорение, положение объекта с необходимыми коэффициентами и размерностями.
Например, энкодер установлен на валу электродвигателя, который перемещает одну деталь по направлению к другой. Путем вычислений на экране оператора отображается зазор между деталями, а при достижении некоторого минимального зазора движение деталей прекращается, чтобы избежать их повреждения.
Также преобразователи угловых перемещений нередко используются в качестве элемента обратной связи на валу двигателя, подключенного через частотный преобразователь. В этом случае энкодер устанавливается на валу двигателя или редуктора, и подключается к частотнику через специальную плату сопряжения. Таким образом, появляется возможность точного позиционирования поддержания нужной скорости и момента двигателя.
Другие полезные материалы:
10 типичных проблем с частотниками
FAQ по электродвигателям
Использование тормозных резисторов с ПЧ
Энкодер что это такое
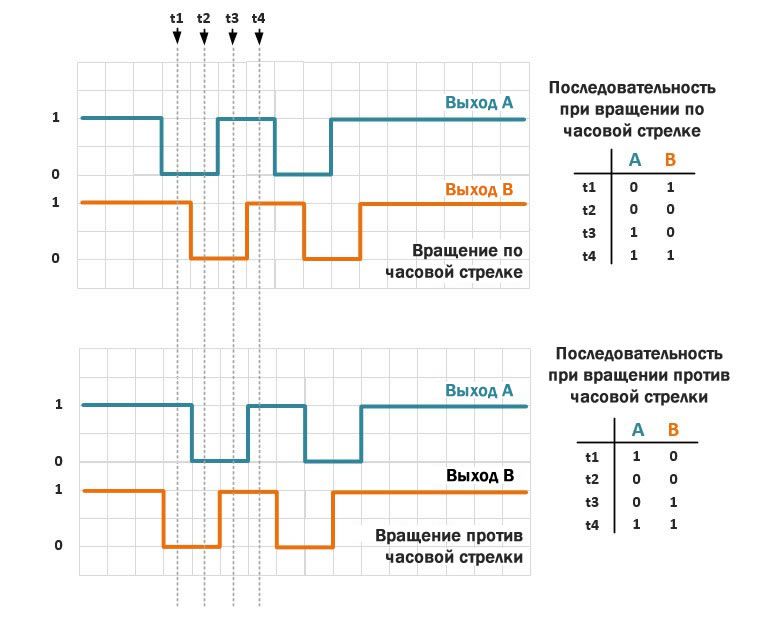
| Определение направления вращения в осциллограмме |
Энкодер что это такое? Весьма часто в автомагнитоле, принтере, и других электронных устройствах можно видеть такие электронные компоненты, как энкодер. Так что же это такое? Может быть это переменный резистор? Вовсе нет.
Инкрементальный (или инкрементный, от англ. increment — «увеличение») энкодер (датчик угла поворота) — это электронно-механический компонент, который преобразовывает вращательное движение вала в пачки электрических импульсов, позволяющих определить направление и угол вращения самого вала. Также, зная число импульсов в единицу времени, можно определить и скорость вращения. Основным отличием инкрементальных энкодеров от абсолютных является то, что они могут сообщать лишь о величине изменения их положения, а не об абсолютном своем состоянии. Самым популярным примером использования инкрементального энкодера в повседневной жизни, является ручка регулировки громкости современной автомобильной магнитолы с цифровым управлением.
Также энкодеры идеально подходят для реализации навигации по различным меню.
Инкрементальные энкодеры бывают оптическими, магнитными, контактными. Вне зависимости от принципа устройства все инкрементальные энкодеры на выходе генерируют 2 линии (A и B) с импульсами смещенными относительно друг друга. Именно по смещению импульсов можно судить о направлении вращения. А по количеству импульсов — об угле поворота.
Каждый инкрементальный энкодер имеет следующую основную характеристику — дискретность (количество шагов, положений между импульсами, на один оборот вала). Благодаря дискретности, можно вычислить угол единичного изменения положения. Например, энкодер Borns 3315-9 за полный оборот генерирует 30 импульсов. А это значит, что каждый шаг эквивалентен повороту на 12°. Помимо этого, вал энкодера фиксируется в каждом положении между каждой пачкой импульсов.
Классифицировать энкодеры можно распределив их по четырём большим группам:
- контактные энкодеры
- магнитные энкодеры
- оптические энкодеры
- энкодеры для аудиоаппаратуры
Если мы говорим контактных механических энкодерах то, ключевым элементом энкодера являются две пары подпружиненных контактов и металлическая пластина с засечками с компактным механизмомм размыкателя. При вращении вала, каждая пара контактов замыкается и размыкается. Но эти пары контактов расположены таким образом, что при вращении вала энкодера в разные стороны порядок замыкания/размыкания контактов разный и, благодаря этому моменту, можно определить направление вращения вала механического энкодера.
Магнитные энкодеры для своей работы используют эффект Холла, обеспечивающий изменение проводимости полупроводника в зависимости от значени индукции магнитного поля. Оптические или оптоэлектронные энкодеры содержат в себе миниатюрную оптопару, и крыльчатку обеспечивающую преобразование угла поворота в пачки импульсов.
На иллюстрации изображена структура механического контактного энкодера:
Что такое энкодер и его сферы использования?
Благодаря инженерному интересу к робототехнике и ее возможностям, стремительному развитию автомобилестроения и оптимизации работы электро-вычислительных машин, в технике появилось новое устройство под названием энкодер.
Что такое энкодер? Если быть более точным, то энкодер – прибор, который конвертирует угловое или линейное перемещение в последовательность сигналов.
Известен еще как датчик угла поворота – преобразует угол поворота объекта, который вращается (вал) в электрические сигналы, позволяющие определить тот же угол поворота (вала), направление его вращения и положение относительно оси.
Потребность в данном датчике возникла при поиске новых, более совершенных методов создания и работы всем известных сервомоторов. Первым был импульсный магнитный энкодер, который определял положение ротора в системе бесщеточного двигателя постоянного тока (двигатель с электронной коммутацией). Энкодер во время вращения производил импульсы по числу полюсов магнита.
На данный момент по типу действия, мы имеем как минимум три вида энкодеров:
- Магнитные;
- Магниторезисторные;
- Оптические.
Наряду с энкодерами, нередко используются и датчики температуры, поскольку там, где есть механическое или любое другое движение возникает трение и рост температуры, значения которой не должны превышать допустимых норм.
Сферы применения энкодеров
Энкодер используется в:
- печатной промышленности – вращение валов, по которым проходит печатная бумага и краска;
- металлообработке – вращение валов с металлическими лентами и т.д;
- робототехнике – движение разных частей тела робота;
- автомобильной технике – определение положения колес при повороте;
- городском хозяйстве — лифтовой технике;
- пищевая, химическая промышленность — автоматы для фасовки, упаковки и разлива;
- электро-вычислительная техника — компьютерные мыши;
- электротехника – сервомоторы и прочих устройствах, требующих точных измерений показателей движения элементов и объектов.
Учитывая то, что как минимум в пяти из девяти пунктов используются установки, принцип работы которых основан на давлении воздуха/масла/краски, то не лишними будут и датчики давления. Они позволят вовремя определить уровень износа постоянно работающих механизмов и заменить их без вреда для производства.
Выбирая электронное, электронно-механическое и механическое оборудование в интернет-магазине «Энергопуск», вы обеспечиваете свое производство или дом только качественными устройствами, которые будут достойно служить вам.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Вт)
что это такое, принцип работы, виды, для чего используется
Что такое линейный энкодер
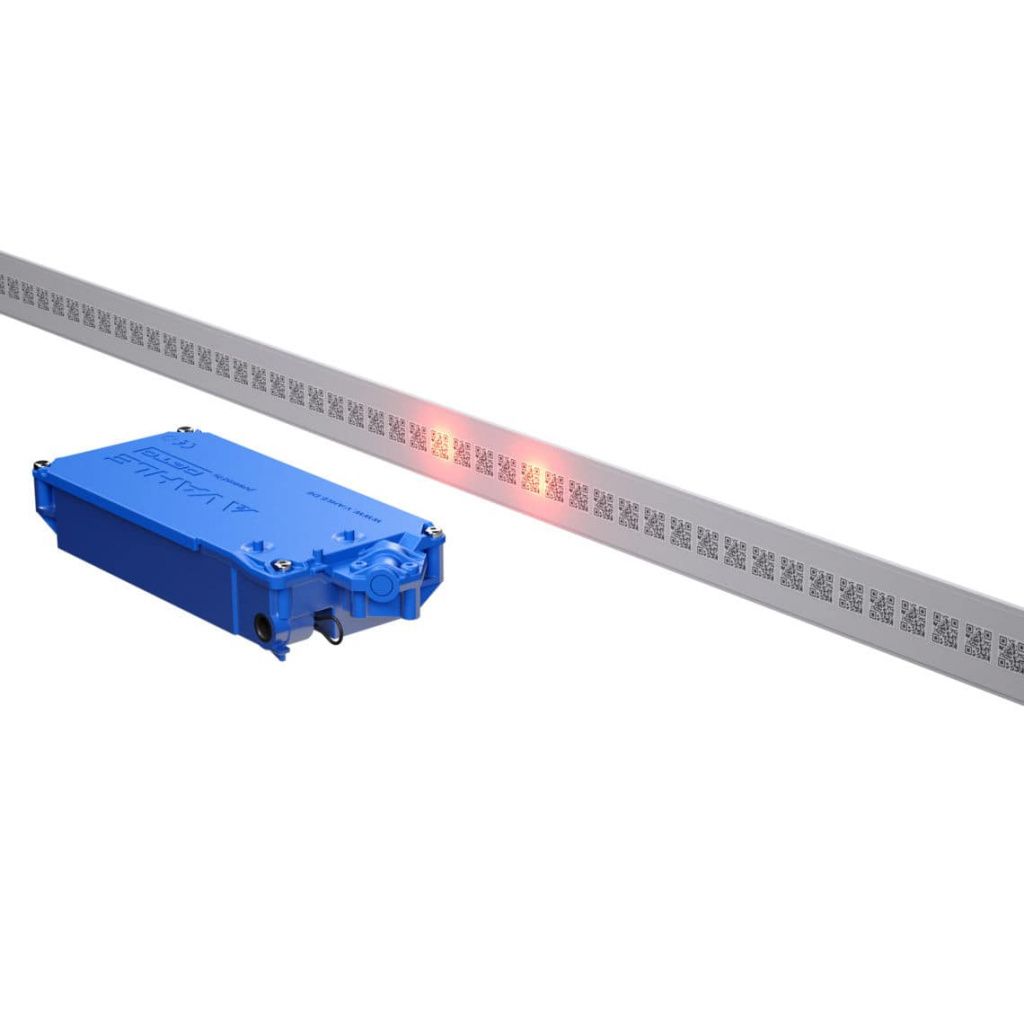
Данные устройства носят название линейных, потому что служат для замеров по линейным перемещениям объекта. Это касается определения его позиции, скорости, ускорения и иных параметров. В любом случае, измерению будет подвергаться только перемещение линейного типа. Если же требуется проводить замеры движения вращающихся объектов или перемещающихся по кривым траекториям, то нужно выбирать среди других типов энкодеров.
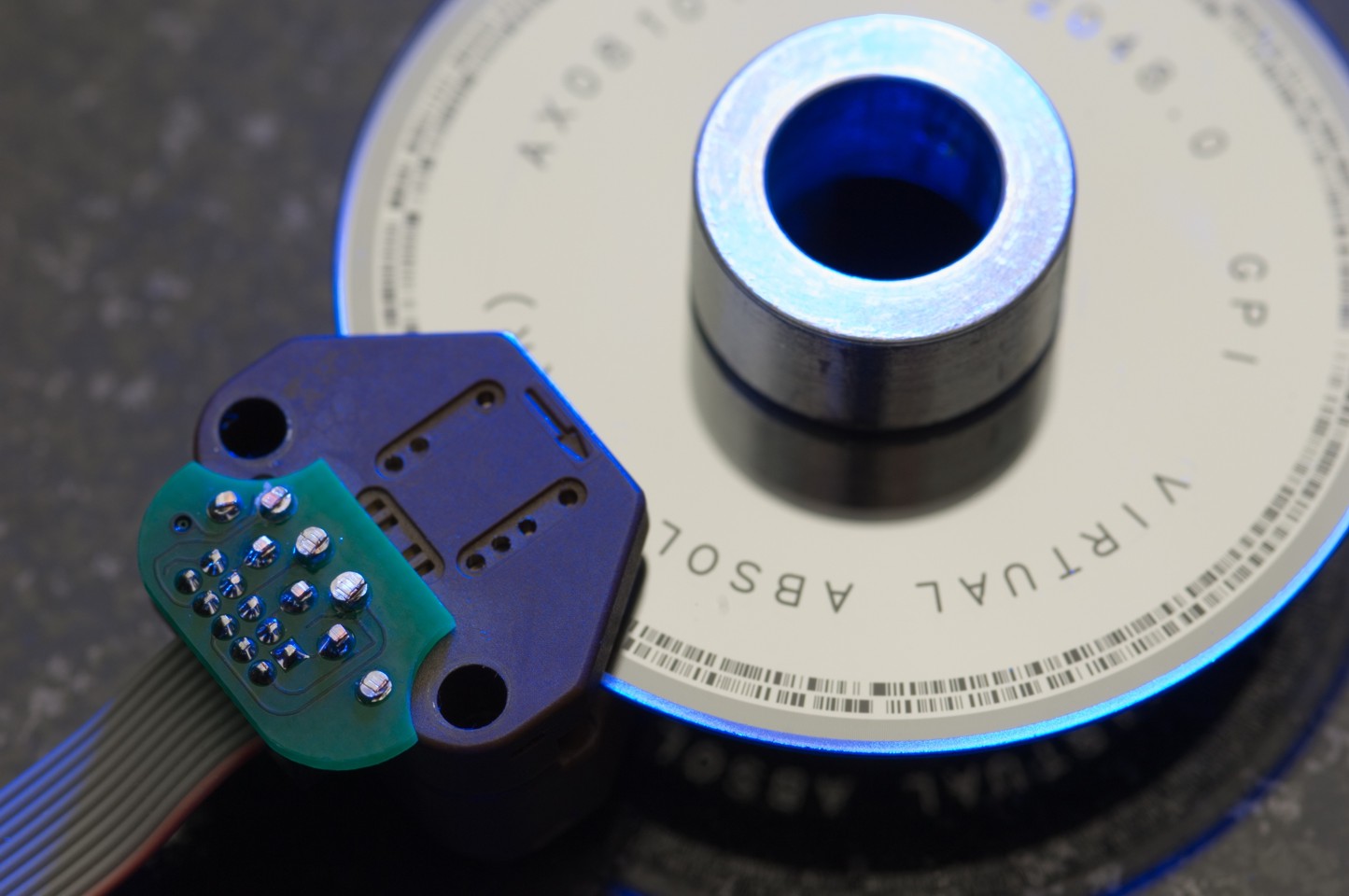
В общем виде устройство состоит из непосредственно энкодирующего блока и специальной магнитной рейки, на которую наносятся в определенной последовательности магниты. При этом сканирующая область включает специальные встроенные магнитно-резисторные датчики, проводящие замеры абсолютного или относительного положения объектов.
Благодаря защищенному корпусу, допускается эксплуатация таких энкодеров в разных средах – жидких и газообразных, твердых и сыпучих.
Наиболее часто применяются бесконтактные замеры, поэтому части устройства не изнашиваются и могут служить продолжительное время.
Принцип функционирования
В состав линейных энкодеров входит компактная считывающая головка, которая перемещается по магнитной ленте со специальным кодом, образующим своеобразную шкалу для измерений.
На ленте имеется запись на двух дорожках:
- инкрементальной;
- абсолютной.
Чтобы точно считать абсолютное значение, головкой считываются одновременно две дорожки (бесконтактным методом). После того, как сигнал с дорожки считан, его значение (то есть, информация о перемещении и координатах объекта) отправляется на обработку теми или иными автоматизированными системами. Передача может осуществляться через разные интерфейсы, в зависимости от установленного оборудования.
Вал выполняют из высокопрочной стали. Абсолютные коды под поверхностью вала изготовлены в виде небольших канавок, внутри которых находится тот или иной немагнитный материал. Может быть использован хром либо медь – в зависимости от того, в какой именно области техники применяется энкодер. После этого на поверхность вала наносят прочное хромовое покрытие, которое затем полируется.
Благодаря пассивности шкалы, какие-либо внешние источники магнитного поля на вал не воздействуют. Кроме того, хромовое покрытие обеспечивает защиту от всевозможных загрязнений. Шкала может вращаться без потери своего положения. На функциональных характеристиках самого механизма наличие энкодера никак не отражается благодаря тщательной полировке вала.
Модуль может включать в себя пару подшипников, встроенных внутрь корпуса и выполненных из нержавейки. Благодаря этому, достигается максимально плавное передвижение при точном выравнивании датчиков над валом в неблагоприятных эксплуатационных условиях.
Разновидности линейных энкодеров
Разновидностей энкодирующих датчиков линейного типа существует немало. Но данные устройства принято разделять по таким определяющим меркам, как:
- по демонстрации информации – инкрементные и абсолютные датчики;
- по функционированию – оптические, магнитные или механические устройства.
Сейчас, в основном, монтируются бесконтактные – оптические либо магнитные модели.

Особенности установки и использования
Монтажом энкодеров любого типа должны заниматься специалисты, понимающие технологические особенности производства. В этом случае можно рассчитывать на качественный монтаж энкодеров и корректность их показаний.
Устройства можно устанавливать прямо на передние части приводов, благодаря чему будут сведены к минимуму габариты всей системы и снижена ее сложность. Таким образом, можно будет исключить потенциальный отказ оборудования.

Энкодеры используются в таких многих сферах промышленности как:
- пищепром;
- печать;
- деревообработка;
- текстиль;
- металлообработка.
что это такое, принцип работы, виды, для чего используется
Разновидности
Различаются следующие виды энкодеров:
- абсолютного типа;
- инкрементального типа.
Абсолютная модель выдает уникальные цифровые коды относительно отдельно взятого расположения вала, потому становится возможным определять углы поворота даже после того, как было отключено электропитание.
Энкодеры инкрементального вида выдают импульсный цифровой код для каждого отдельно взятого положения вала электромотора. Такие устройства позволяют определять, с какой скоростью вращается вал во время отключения электропитания в том случае, когда нет необходимости сохранять информацию об абсолютном угловом положении.
Иначе говоря, в то время, когда вал не движется, импульс не поступает. Следовательно, когда он снова приходит в движение, датчики будут вести отсчеты его угловых параметров с исходной позиции.
Инкрементальный энкодер

Импульсные (они же пошаговые) энкодеры относят к той разновидности энкодирующих устройств, что предназначены с целью указания направлений углового перемещения всевозможных внешних механизмов. Пошаговые энкодеры формируют импульсы, число которых соответствует числу поворота вала на определенные углы. Они связаны со счетными приборами – это требуется для того, чтобы можно было считать импульсы и преобразовывать их в измерения перемещения вала.
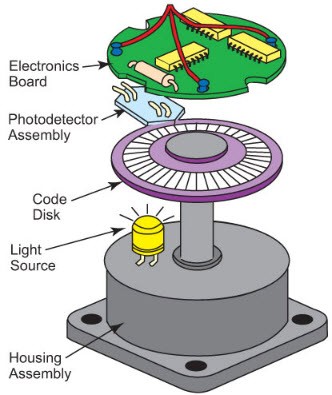
Конструктивные особенности
Конструктивной особенностью данной разновидности можно считать наличие следующих элементов:
- источник света;
- специальный диск с нанесенными на нем отметками;
- фототранзисторная сборка;
- схемы для обрабатывания сигналов.
Метки, нанесенные на диск, распределяются определенным образом – их число будет определяться числом импульсов, осуществленных в рамках одного оборота. К примеру, если диск разделяется на 1000 меток, то в продолжение 250 импульсов вал будет повернут под прямым углом.
Применяемые технологии – магнитная и оптическая
Сегодня энкодеры работают, как правило, на основании двух технологий – оптической и магнитной.
Так, в приспособлениях оптического типа в качестве первичных датчиков сигналов выступают оптические диски, описанные выше. Число зачерненных и прозрачных отметок, расположенных на диске, будет определять и степень разрешения.
Но в последнее время популярность начинают приобретать энкодеры магнитного типа. В них сигналы положения вала двигателя формируются специальным датчиком. При этом открываются новые технологические возможности, к примеру, программируемое число импульсов за один оборот.
Квадратура выхода
В качестве так называемой квадратуры выхода в данном виде энкодирующих устройств применяется пара выходных каналов. Они позволяют определять, в каком именно направлении происходит вращение вала.
При этом энкодеры, оборудованные всего одним выходом (на схеме обозначается литерой А), носят название тахометров.
Максимальная частота ответа
В качестве максимальной частоты ответа выступают частоты, при которых работающий энкодер дает электрические ответы. Максимальные частоты определяют число импульсов на выходе, на которые он отзывается в течение одной секунды.
Таким образом, пошаговые энкодеры должны удовлетворять следующему отношению:
(rpm / 60)x(разрешение) меньше или равно максимальной частоте ответа.
Разрешение
Под разрешением подразумевают число выходных импульсов при каждом вращении вала.
Соединительный вал
Чтобы вал датчика был соединен механическим способом, нужно применять специальные гибкие соединители – эластичные муфты. Они предназначены для того, чтобы компенсировать возможное биение вала в любых направлениях.
Благодаря этому, снижается степень преждевременного выхода из строя валового механизма датчика. Даже минимальные люфты могут вывести энкодер из строя.
Виды пошаговых энкодеров и их особенности
Кроме предложенной выше классификации, инкрементальные энкодирующие устройства можно поделить согласно типу информации для считывания.
Одиночные нужны для простого подсчета числа импульсов.
Преимущества:
- максимальная простота в конструкции и использовании;
Недостатки:
- во время запуска непонятно, в каком именно положении находится;
- велика вероятность ошибок во время подсчета импульсов из-за ложного срабатывания;
- нельзя определить направленность движения.
Квадратурные, они же двойные, энкодеры позволяют считывать не только число поступаемых импульсов, но и направление движения.
Преимущества:
- простота конструкции;
- практически отсутствуют ошибки во время счета импульсов;
- можно определять направленность движения.
Недостатки:
- во время запуска непонятно, в каком именно положении находится энкодер.
Энкодирующие устройства, построенные на двоичном коде, позволяют определять точное положение устройства в тот или иной момент.

Преимущества:
- инициализация происходит без ошибок;
- нет необходимости в считывании импульсов;
- можно определять направленность движения.
Недостатки:
- из-за наличия нескольких датчиков аппарат несколько сложнее;
- возникновение проблем с граничным положением в случае использования более одного бита;
- разрешающая способность несколько ограничена.
Энкодирующие устройства, основанные на так называемом коде Грэя, дают возможность определять положение в данный момент.
Преимущества:
- безошибочная инициализация и подсчет импульсов;
- можно определять, в каком направлении происходит вращение;
- можно использовать более одного бита без риска возникновения ошибок на граничном положении.
Недостатки:
- относительно сложны в использовании;
- присутствует определенное ограничение по разрешению.
Некоторые особенности подключения
При подключении и отладке энкодеров необходимо строго придерживаться рекомендаций, данных производителем.
Для начала нужно собрать исходную схему, согласно инструкции от производителя, и подключиться к выводам А и В с помощью осциллографа. Далее необходимо подкрутить подключаемый энкодер сначала по часовой стрелке, а затем – в противоположном направлении. При изменении направления вращения будет изменяться и последовательность замыкания контактных пластин.
Поскольку в энкодерах работают контакты механического типа, то всегда есть риск возникновения так называемого дребезга. Это приводит к тому, что контакт может замыкаться и размыкаться самопроизвольно – из-за естественной упругости материала.
Чтобы избежать дребезга, можно пойти двумя путями. Например, добавить еще несколько конденсаторных или резисторных элементов. Дребезги в этом случае можно довольно легко погасить. При этом осциллограф покажет крутые фронты и отсутствие дребезга.
А вот второй метод является программным. Это потребует от исполнителя знаний программирования. Зато можно будет отслеживать состояние энкодирующего устройства при помощи внешнего прерывания. В этом случае необходимо организовать задержки в течение 2-3 десятков миллисекунд после каждого срабатывания прерывания. В это время энкодер перестанет фиксировать изменения состояний вывода, следовательно, перестанет быть чувствительным к дребезгам.
Используется несколько методов обработки данных, поступающих с прибора. Например, одна из его ножек подключается к выходу для внешнего прерывания и настраивается на прерывание по спадающим фронтам. При этом проверяется положение второй ножки. В том случае, если на ней фиксируется нулевое состояние, движение вала осуществляется в одном направлении. При этом светодиоды загораются или гаснут в зависимости от направления вращения.
Согласно второму методу, нужно сравнить настоящее положение с предыдущим. Например, предыдущее состояние энкодера равнялось трем. Если последующее положение равняется одному, то вращение осуществляется в одном направлении. Если же оно равно двум, соответственно, в другом. Таким образом, можно будет осуществлять фиксацию перехода из одного положения устройства в другое, и устанавливать направление движения вращения.
Крепление устройства с вращающимися объектами осуществляется через нормальные или полые валы. При этом полый вал может быть выполнен как в сквозном, так и в несквозном варианте. Здесь все зависит от конкретных конструктивных особенностей устройства и преследуемых целей.
Валы энкодера и вращающихся объектов соединяются также с помощью гибких или жестких соединительных муфт. Как альтернативный вариант крепления, нередко используют монтаж прямо на вал самого объекта. Это возможно, если аппарат оснащен полым валом. Чтобы не допустить возможного возникновения несоосности и биений, можно зафиксировать его через штифты. Если же речь идет о неполом вале, то биение может быть скомпенсировано через гибкую деформацию втулки.
Чем привлекательны данные виды энкодеров
Энкодирующие устройства неспроста получили столь обширное распространение при конструировании большого спектра устройств. Они довольно дешевы и просты в монтаже.
Чтобы выбрать верный вариант для успешного внедрения в те или иные управленческие схемы, потребуется определиться:
- Насколько точно требуется проводить измерения. Об этом будет говорить число обрабатываемых импульсов за каждый оборот энкодирующего вала.
- Толщина вала, а также его модельная разновидность. Это влечет за собой необходимость в правильном подборе дополнительного оборудования, такого, как муфты, фланцы и т.д.
- Определиться с необходимой длиной кабеля, его поперечным сечением, а также с типом разъемов на выходе.
- Потребуется принять во внимание величину рабочего напряжения и прочие электрические характеристики.
- Осуществление связи энкодирующего оборудования с остальными элементами системы. Нужно будет уметь его программировать, обеспечивать параметры цикличности осуществления передачи результата замеров с частотностью опроса на входе используемых контроллеров, либо предусмотреть работу в стандартном интерфейсе.
Принцип работы энкодеров
Датчики углового и линейного перемещения, датчики наклона
Инкрементальные энкодеры
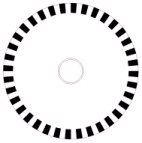
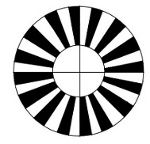
Инкрементальный энкодер (Incremental Encoder) регистрирует относительное перемещение (приращение). Разрешение (Resolution) углового энкодера определяется количеством импульсов на один оборот (на рисунке изображён оптический дик с разрешением 8 имп/об).
Частота импульсов на выходе энкодера пропорциональна скорости вращения.
Система управления должна подсчитывать импульсы, чтобы вычислить угол поворота энкодера относительно точки отсчёта.
В системах, работающих с абсолютными координатами (станок с ЧПУ), перед началом работы (после включения питания) необходимо выставить ноль – вывести рабочий орган машины в опорную (реперную) точку и в ней обнулить счётчик импульсов.
Синусно-косинусные инкрементальные датчики положения sin/cos 1-Vss и 1-Vpp
Синусоидальные выходные сигналы А и В сдвинуты друг относительно друга на 90 градусов, что позволяет определять направление вращения. Сигнал нулевой метки R используется для синхронизации с точкой отсчёта. Для повышения помехозащищённости датчик выдаёт ещё три инверсных сигнала: A, B, R. Оцифровываются эти сигналы в системе измерения.
Датчики с интерфейсом 1-Vpp используются в сервосистемах, т.к. как позволяют получать очень высокое разрешение. Так, например, если датчик выдаёт 2048 периодов синусоиды (импульсов) на оборот, а система управления в каждой такой синусоиде различает 2048 дискретных уровней, то общее разрешение датчика составит 2048 х 2048 = 4194304 импульсов на оборот.
Инкрементальные датчики с интерфейсом TTL или HTL
Эти датчики сами оцифровывают синусоидальные сигналы – у них на выходе 6 прямоугольных сигналов — три прямых: A, B, R и три инверсных: A, B, R. Для сигнализации неисправности датчика используется инверсный сигнал помехи (если нет неисправности, то сигнал помехи равен 1).
Абсолютные энкодеры
Разрешение абсолютного энкодера (Absolute Encoder) определяется количеством уникальных кодов на один оборот. Однооборотные (Single-turn) абсолютные энкодеры определяют положение в пределах одного оборота, многооборотные (Multi-turn) – в пределах определённого числа оборотов.
Абсолютные датчики положения не требуют для начала работы выхода в опорную точку – при включении питания датчик сразу определяет координату, сканируя кодовые дорожки.
Резольверы
Резольвер (Resolver) – это аналоговый электромагнитный абсолютный однооборотный датчик, работающий по принципу вращающегося электрического трансформатора.
Рассмотрим работу бесщёточного резольвера.
На статоре расположены три обмотки: первичная обмотка возбуждения вращающегося трансформатора
(на неё подаётся переменное напряжение) и две двухфазные обмотки, механически повёрнутые друг относительно друга
на 90 градусов: синусная и косинусная.
На роторе расположена вторичная обмотка вращающегося трансформатора, которая возбуждается от первичной обмотки
на статоре за счёт электромагнитной индукции. Обмотка ротора в свою очередь индуцирует в синусной обмотке статора
напряжение пропорциональное синусу угла поворота ротора, а в косинусной обмотке — напряжение пропорциональное
косинусу угла поворота ротора.
Резольверы отличаются высокой надёжностью (они не бьются и не запотевают, как оптические) и точностью (аналоговые, а не дискретные).
Код Грея
Код Грея (Gray Code) – это двоичный код, в котором два соседних значения отличаются только одним разрядом.
| Десятичное число | Двоичное число | Код Грея |
|---|---|---|
| 0 | 000 | 000 |
| 1 | 001 | 001 |
| 2 | 010 | 011 |
| 3 | 011 | 010 |
| 4 | 100 | 110 |
| 5 | 101 | 111 |
| 6 | 110 | 101 |
| 7 | 111 | 100 |
Формула побитного преобразования двоичного кода в код Грея
Gi = Bi⊕Bi+1,
биты нумеруются справа налево, ⊕ – исключающее ИЛИ (если биты равны, то результат равен 0; если биты не равны, то результат равен 1).
Код Грея используется для кодирования положений в абсолютных датчиках, так как обладает большей помехозащищённостью, чем обычное двоичное кодирование (Natural Binary).
На рисунке изображён оптический диск с 3-х разрядным (8 положений) кодом Грея.
Тахогенераторы
Тахогенераторы предназначены для определения скорости и направления вращения. Напряжение на выходе тахогенератора пропорционально скорости вращения вала.
мастхэв производственной линии / Статьи и обзоры / Элек.ру
Всем привет! Кто меня не знает — я представлюсь: автор блога об электрике и электронике SamElectric.ru, активно практикующий электрик и электронщик Александр Ярошенко. Как обычно, мои статьи на страницах этого журнала тесно связаны с промышленным оборудованием. На этот раз я подробно рассматриваю энкодер — устройство, без которого не обходится ни одна солидная производственная линия.
Что такое энкодер?
Я обслуживаю парк промышленного оборудования, в котором широко применяются энкодеры. Об этом сегодня и поговорим. Разберем подключение и монтаж энкодеров, а напоследок — несколько реальных случаев их применения.
Надеюсь, что все читатели знают, что такое энкодер. На всякий случай напомню, что это электронное устройство, которое позволяет измерять скорость вращения, угловое положение либо направление вращения. Можно сказать иначе, энкодер — это датчик, который выдает сигнал в зависимости от угла его поворота.
Теоретически энкодеры бывают двух видов — инкрементальные и абсолютные. Абсолютные нужны там, где в любой момент времени (в том числе в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с использованием обработки при помощи контроллеров, абсолютные энкодеры практически не используются. Тем более учитывая, что их цена в несколько раз выше, чем у инкрементальных энкодеров.
Одному полному обороту энкодера обычно соответствует 1024 различных уровня сигнала, они говорят о его угловом положении. В более совершенных моделях на один оборот приходится 2048 или даже 4096 секторов.
Как подключаются энкодеры
Подключить энкодер легко — ведь это фактически датчик с транзисторными выходами. В простейшем случае выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом, появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера.
Монтаж энкодеров
По монтажу сразу скажу главное — вал энкодера должен быть надежно зафиксирован! Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину — ведь все остается исправным!
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть
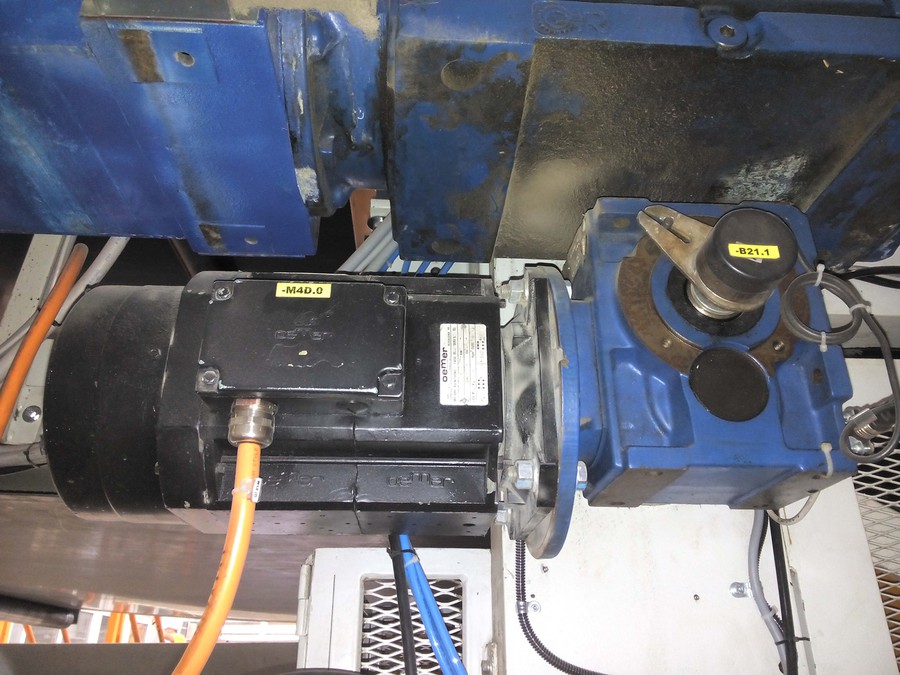
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора.
 Энкодер с полым валом
Энкодер с полым валомПроизводители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много — их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics — как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров — немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлены часто не техническими причинами, поскольку их параметры и надежность практически идентичны. Тут, скорее, политические мотивы — производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших производственных линий, чтобы таким образом закрепиться на рынке.
Рассмотрим несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
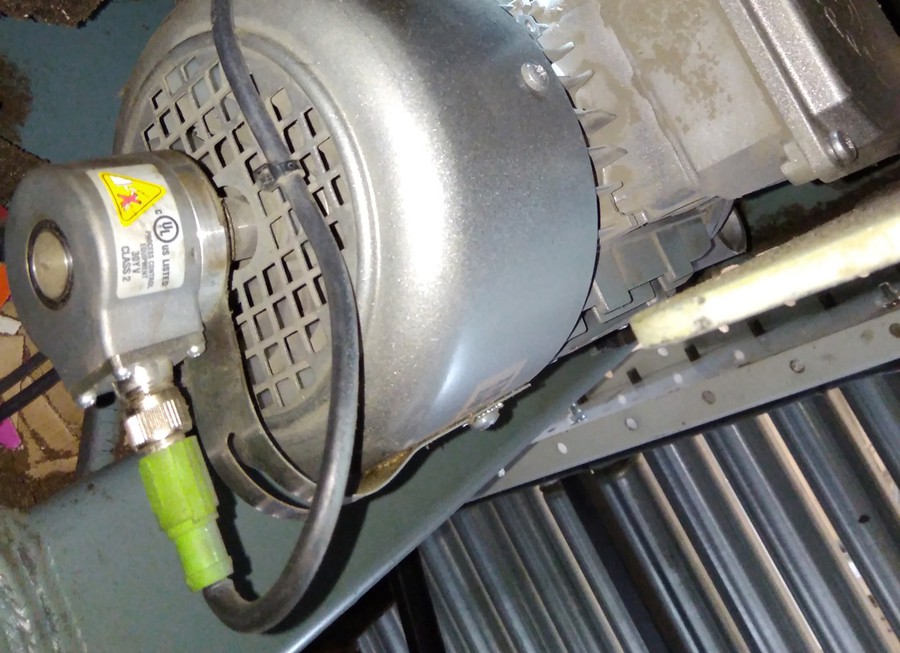
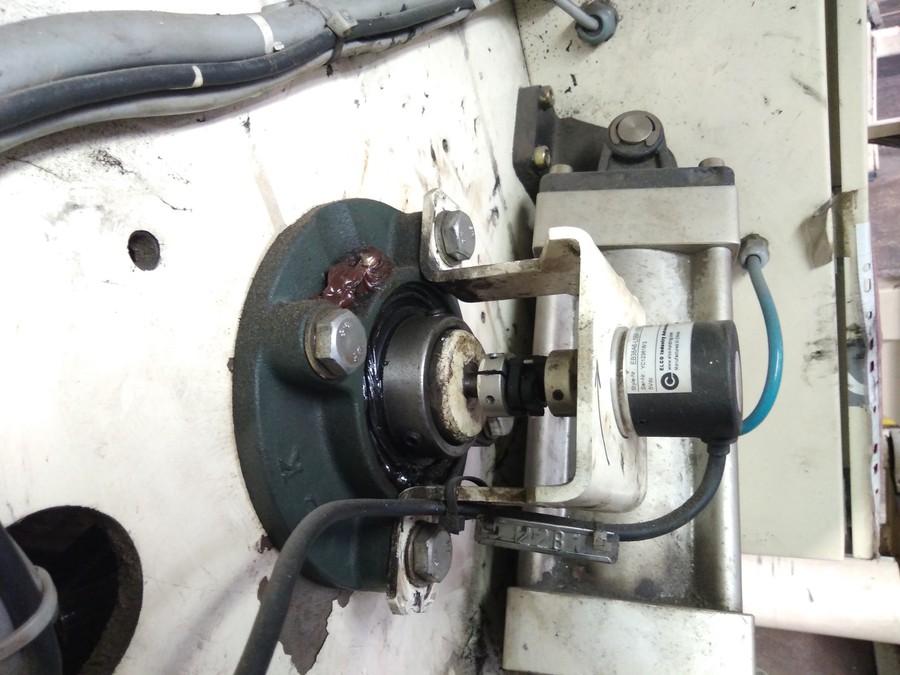 Энкодер на валу
Энкодер на валуВ данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
Минус такой установки — при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.
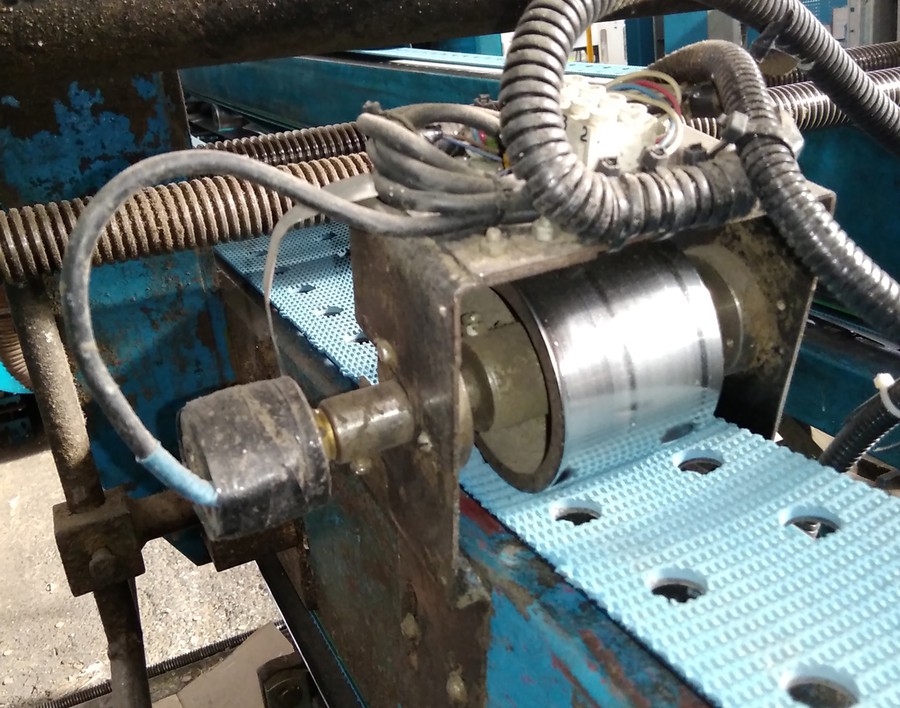
 Энкодер на роторе двигателя
Энкодер на роторе двигателяС помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точностью может управлять обработкой деталей.
По моему мнению, насаживание энкодера на вал двигателя — не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером
Перемещение детали
Еще большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.
 Направляющая, ходовой винт, кабель к энкодеру (сверху вниз)
Направляющая, ходовой винт, кабель к энкодеру (сверху вниз)Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это — металлическая заготовка), то с помощью энкодера можно до долей миллиметра узнать ее положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
Минус такого решения — при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости.
Перемещение упора
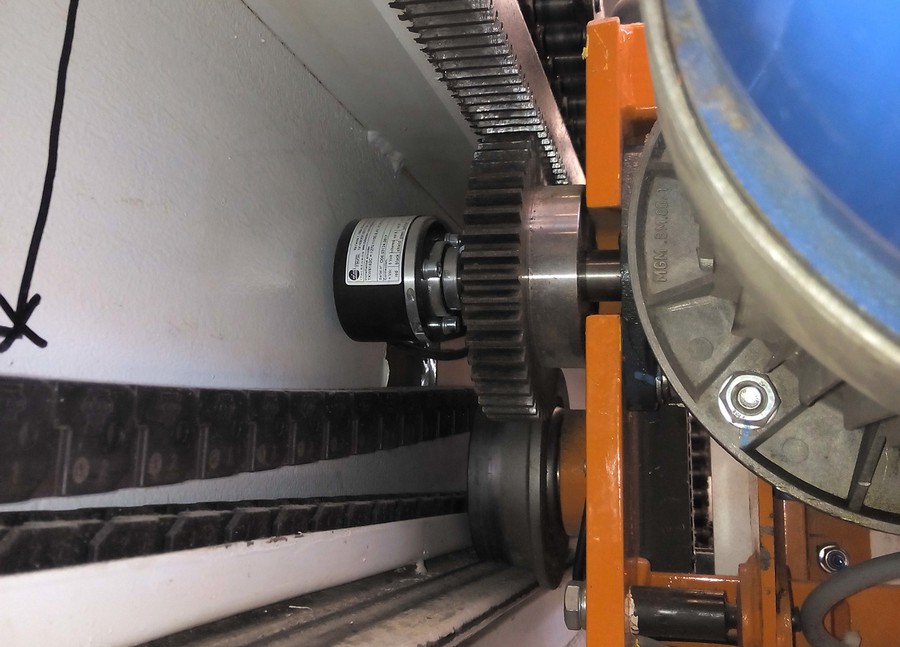 Зубчатая передача
Зубчатая передачаЗадача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения — за счет зубчатой передачи.
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения.
При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.
 Вычисление точной координаты
Вычисление точной координатыФормируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой — энкодер.
 Поворот вала
Поворот валаПоворот вала редуктора на угол не более 180° ограничен датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Подытожим
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Точнее (и дороже) его — только сервоприводы.
Источник: Александр Ярошенко, автор блога SamElectric.ru. Статья опубликована в журнале «Электротехнический рынок», №1 (85) 2019
Что такое энкодер? > Энкодеры
Para la versión en español, haga click aquí.
Если вы используете кодировщик Google, вы получите огромное количество запутанных ответов. Для наших целей энкодеры используются в оборудовании для обратной связи по движению и управления движением .
Кодерыиспользуются в машиностроении во всех отраслях промышленности. Вы найдете кодеры, используемые в приложениях для резки по длине, плоттерах, робототехнике, упаковке, транспортировке, автоматизации, сортировке, наполнении, формировании изображений и многих, многих других.Возможно, вы никогда их не замечали, но они есть. В этом сообщении в блоге и видео мы дадим вам очень общее представление о том, что такое кодировщик и что он делает.
Проще говоря, энкодер — это чувствительное устройство, обеспечивающее обратную связь. Энкодеры преобразуют движение в электрический сигнал, который может быть прочитан каким-либо устройством управления в системе управления движением, например счетчиком или ПЛК. Энкодер отправляет сигнал обратной связи, который можно использовать для определения положения, счета, скорости или направления.Управляющее устройство может использовать эту информацию для отправки команды для определенной функции. Например:
- При резке по длине датчик с мерным колесом сообщает устройству управления, сколько материала было подано, поэтому устройство управления знает, когда резать.
- В обсерватории энкодеры сообщают исполнительным механизмам, в каком положении находится подвижное зеркало, обеспечивая обратную связь по позиционированию.
- На домкратах для железнодорожных вагонов точная обратная связь по движению обеспечивается кодировщиками, поэтому домкраты поднимаются синхронно.
- В системе нанесения этикеток с сервоприводом точности сигнал энкодера используется ПЛК для управления синхронизацией и скоростью вращения бутылок.
- В приложении для печати обратная связь от кодировщика активирует печатающую головку для создания метки в определенном месте.
- В большом кране энкодеры, установленные на валу двигателя, обеспечивают обратную связь по позиционированию, чтобы кран знал, когда поднять или спустить груз.
- В приложении, где наполняются бутылки или банки, обратная связь сообщает разливочным машинам положение контейнеров.
- В лифте энкодеры сообщают контроллеру, когда кабина достигает правильного этажа в правильном положении. То есть обратная связь по движению энкодера с контроллером лифта гарантирует, что двери лифта открываются на уровне пола. Без кодировщиков вы можете залезть в лифт или выйти из него, а не просто выйти на ровный этаж.
- На автоматизированных сборочных линиях энкодеры сообщают роботам о движении. На автомобильной сборочной линии это может означать, что роботизированные сварочные манипуляторы имеют правильную информацию для сварки в правильных местах.
В любом приложении процесс один и тот же: кодировщик генерирует счетчик и отправляет его в контроллер, который затем посылает сигнал машине для выполнения функции.
Кодеры
используют различные типы технологий для создания сигнала, в том числе механические, магнитные, резистивные и оптические. Наиболее распространены оптические технологии. При оптическом считывании кодировщик обеспечивает обратную связь на основе прерывания света.
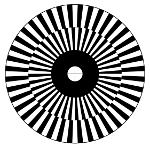
На рисунке справа показана базовая конструкция инкрементального энкодера, использующего оптическую технологию.Луч света, излучаемый светодиодом, проходит через кодовый диск, на котором нанесен узор из непрозрачных линий (как на спицах велосипедного колеса). При вращении вала энкодера световой луч светодиода прерывается непрозрачными линиями на кодовом диске перед тем, как его уловит узел фотодетектора. Это дает импульсный сигнал: свет = горит; нет света = выключено. Сигнал отправляется на счетчик или контроллер, который затем отправляет сигнал для выполнения желаемой функции.
Кодерымогут выдавать как инкрементальные, так и абсолютные сигналы.Инкрементальные сигналы не указывают конкретное положение, только то, что положение изменилось. Абсолютные энкодеры, с другой стороны, используют разные «слова» для каждой позиции, что означает, что абсолютный энкодер обеспечивает как индикацию того, что позиция изменилась, так и индикацию абсолютной позиции энкодера.
Для получения более подробной информации о том, как работают кодеры, см. WP-2011: Основы работы кодировщика и раздел Основы работы с кодировщиком в Руководстве по установке и подключению EPC .
Если у вас есть вопросы о том, как кодировщик будет работать в вашем конкретном приложении, свяжитесь с нами . Когда вы звоните в EPC, вы разговариваете с инженерами и экспертами по кодировщикам, которые ответят на все ваши вопросы.
Позвоните сегодня, и вы сможете получить кодировщик в считанные дни .
.
Различные типы кодировщиков и декодеров и их приложения
 В проектах цифровой электроники кодер и декодер играют важную роль. Он используется для преобразования данных из одной формы в другую. Как правило, они часто используются в системах связи, таких как телекоммуникации, сети, и передают данные с одного конца на другой. Таким же образом он также используется в цифровой области для простой передачи данных, помещаемых вместе с кодами, а затем передаваемых.В конце приемника закодированные данные собираются из кода и затем обрабатываются для отображения. В этой статье обсуждается, что такое кодировщик и кодировщик, работает и его приложения.
В проектах цифровой электроники кодер и декодер играют важную роль. Он используется для преобразования данных из одной формы в другую. Как правило, они часто используются в системах связи, таких как телекоммуникации, сети, и передают данные с одного конца на другой. Таким же образом он также используется в цифровой области для простой передачи данных, помещаемых вместе с кодами, а затем передаваемых.В конце приемника закодированные данные собираются из кода и затем обрабатываются для отображения. В этой статье обсуждается, что такое кодировщик и кодировщик, работает и его приложения. Что такое кодировщик и декодер?
Кодировщик — это устройство, преобразователь или цепь. Кодировщик преобразует информацию из одного формата в другой, например, электрические сигналы в счетчики или ПЛК. Сигнал обратной связи энкодера будет определять положение, счет, скорость и направление.Устройства управления используются для отправки команды определенной функции.
Кодировщик
Декодер — это схема, используемая для преобразования кода в набор сигналов. Само имя сообщает декодеру, потому что оно имеет обратную кодировку. Декодеры очень просты в конструкции.
Декодер
Двоичный декодер
В цифровой электронике двоичный декодер представляет собой комбинационную логическую схему, которая преобразует двоичное целое число в соответствующий шаблон выходных битов.Они используются в различных приложениях, таких как семисегментный дисплей, декодирование адреса памяти. Функция двоичного декодера получается, если данная комбинация входов произошла.
Двоичный декодер
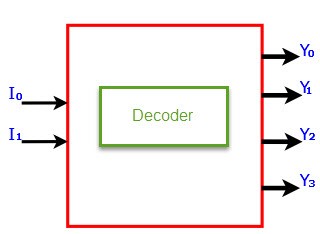
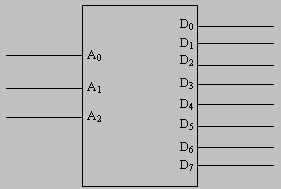
Декодер от 3 до 8
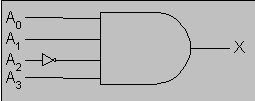
Этот тип декодера называется декодером от 3 до 8 строк, потому что он имеет 3 входа и 8 выходов. Чтобы декодировать комбинацию трех и восьми, нам потребовалось восемь логических вентилей, и для разработки этого типа декодеров мы должны учитывать, что нам нужен активный высокий выход.В таблице ниже показано декодирование декодера от 3 до 8 строк. Для разработки этого типа декодеров нам нужен активный высокий выход, и для данной комбинации входов выход декодера равен единице. В таблице показаны иллюстрации декодирования, а также логический символ от 3 до 8 декодеров.
Декодер от 3 до 8
Из таблицы истинности трех линейных входов до восьми линейных выходов мы можем показать логическую схему. Логическая схема состоит из трех вентилей НЕ и восьми вентилей И-НЕ.Контакт включения логических элементов NAND соединен вместе. Вентили НЕ могут генерировать дополнение ввода, а вентили И-НЕ могут выдавать максимум на каждом выходе.
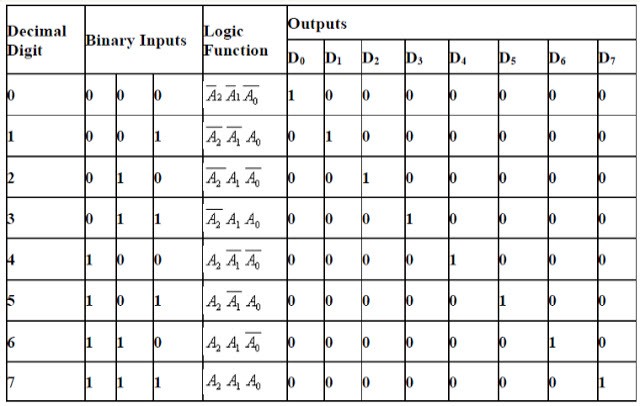
Таблица правды о декодере от 3 до 8
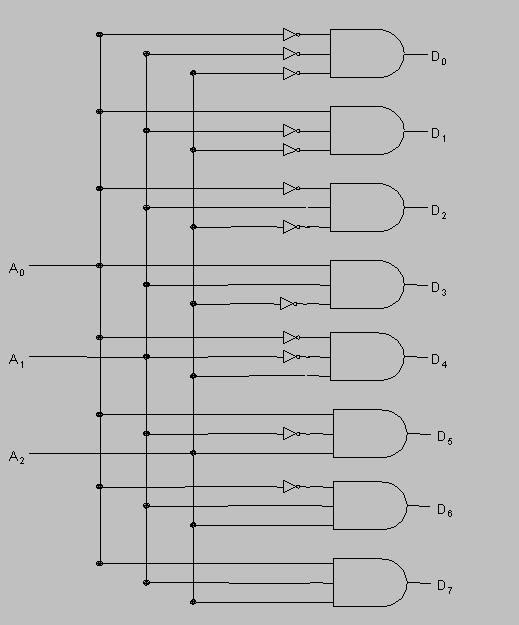
Логическая схема декодера от 3 до 8
Декодер от 2 до 4
В двух-четырех декодерах декодируются две входные линии на четыре строки вывода. Следовательно, этот декодер состоит из двух входных линий и четырех выходных линий. Из четырех выходных линий только одна выходная линия будет активной, а остальные три выходных линии будут поддерживаться на уровне логического нуля.На следующей схеме показаны две входные линии для четырех выходных линий декодера.
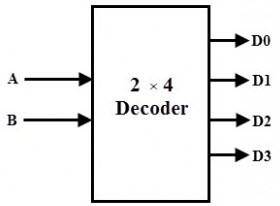
Декодер от 2 до 4
Таблица истинности двух входных линий для четырех выходных линий декодера может быть рассмотрена следующим образом. Если на разрешающих выводах активен высокий уровень, то для данного входа выходы от Y0 до Y3 являются логическими 1. Когда два входа имеют низкий уровень, тогда выход Y0 равен логической 1, а другие выходы — логическому 0. Если оба входа имеют высокий уровень, тогда на выходе Y3 будет логическая 1, а на других выходных контактах — логический 0.Если разрешающий контакт равен нулю, то выходные контакты являются логическими 0. Если входные контакты A = 0 и B = 1, тогда Y1 будет логической 1, или если входы A = 1 и B = 0, то выходной контакт Y2 будет логика 1.
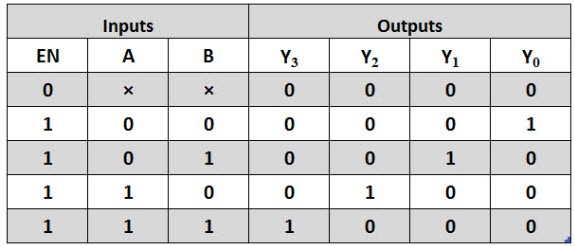
Таблица истинности декодера 2-в-4
Из таблицы истинности булевы выражения каждого выхода
Y0 = A ̅ B ̅
Y1 = A ̅ B
Y2 = AB ̅
Y3 = AB
Используя приведенное выше уравнение, мы можем реализовать конструкцию логической схемы двух линейных входов и четырех линейных выходов.В этой логической схеме используются два элемента НЕ и четыре элемента И. Четыре разрешающих контакта соединены вместе, и если разрешающий контакт равен нулю, то все выходы равны нулю. Если разрешающий вывод — один, то выход зависит от произведения двух входов. Здесь мы разработали логическую схему с вентилем И, но мы также можем реализовать его с вентилями И-НЕ, используя принцип минтеров.
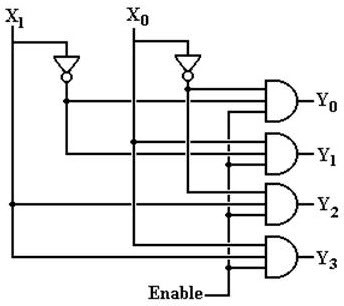
Логическая схема декодера 2-в-4
Работа кодировщика
Для создания сигнала в кодировщиках используются различные типы технологий, в том числе механические, магнитные, резистивные и оптические.Используя прерывание света в оптическом датчике, энкодеры обеспечивают обратную связь. На следующей схеме показана базовая структура инкрементального энкодера с использованием оптической технологии.
Работа кодировщика
Свет, излучаемый светодиодом, проходит через код диска, который имеет непрозрачные линии. Если вал энкодера вращается, световой луч светодиода прерывается непрозрачными линиями на кодовом диске. Это подает импульсные сигналы, и свет присутствует, тогда находится в состоянии ON, а если нет света, то он находится в состоянии ON.Сигналы отправляются на счетчики или контроллер, а затем отправляются сигналы для построения желаемой функции.
Priority Encoder
Priority Encoder — это схема, которая сжимает несколько двоичных входов до небольшого количества выходов. Выходной сигнал кодировщика приоритета находится в двоичном представлении исходного числа наиболее значимых битов. Часто используется запрос прерывания управления с помощью кодировщика с наивысшим приоритетом. Мы можем давать одновременно два или более двух входов, тогда приоритет имеет наивысший приоритет.
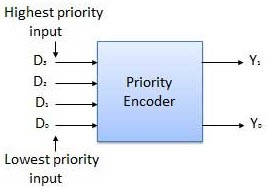
Кодер приоритета
Примером кодировщика приоритета является кодер 4 к 2, и кодеры приоритета подключены к массивам для создания больших кодеров. Кодеры с наивысшим приоритетом находятся слева, а X — несущественное значение, а выход V указывает, действителен ли вход. Большие энкодеры в приоритетных энкодерах — это от 16 до 4 энкодеров, они сделаны с шестью энкодерами с 4 по 2 — для 4-2 энкодеров с одним источником, подключенным к их входам, а оставшиеся два энкодера принимают выход первых четырех в качестве входа .
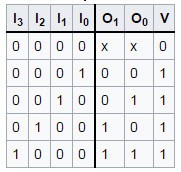
Таблица истинности кодировщика 4-к-2
Логическая схема декодера 2-на-4
Применение кодировщика и декодера
- Синхронизация скорости нескольких двигателей в промышленности
- Полевой боевой робот с летающей камерой ночного видения
- Роботизированное транспортное средство с металлоискателем
- Система домашней автоматизации на основе RF
- Автоматические системы мониторинга состояния здоровья
В этой статье мы обсудили различные типы кодеров и декодеров и их использование.Я надеюсь, что, прочитав эту статью, вы получили некоторую основную информацию об этой статье. Если у вас есть какие-либо вопросы относительно этой статьи или реализации инженерных проектов, пожалуйста, оставьте комментарий в разделе ниже. Вот вам вопрос, что такое приоритетный кодировщик?
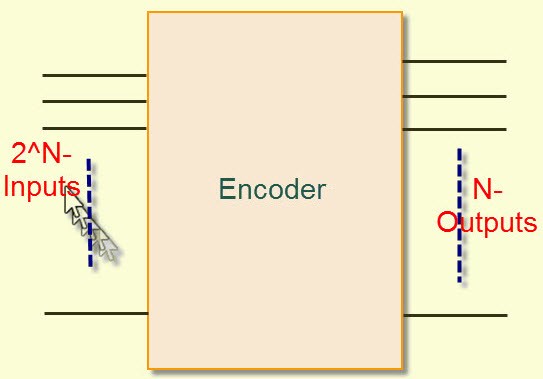
.2 варианта. 00,01,10 и 11. Это означает, что мы можем использовать n-битное число для хранения 2 в степени n данных. По сути, это концепция кодирования.Для выполнения этой операции мы разработали схему, известную как кодировщик . Название схемы является производным от ее назначения.
Кодер приоритета — это тип кодировщика, который улучшает конструкцию простого кодировщика.
Декодер — это схема, отменяющая работу кодировщика.n двоичных входов, по одному, и кодирует их в n битов одного выходного кода.
Чем кодер отличается от мультиплексора?
Мультиплексор принимает один из нескольких входов и отправляет его на выход. Однако кодер принимает все единицы с каждого входа и кодирует их на выходе. Выход может быть 2-битным, 3-битным или 4-битным в зависимости от количества входов.
Следовательно, мультиплексор известен как селектор данных, поскольку он просто выбирает данные и отправляет их на выход.n входов и n выходов. Мультиплексоры и кодировщики тоже имеют отдельные приложения. Мультиплексоры находят применение в каналах связи. Кодеры находят применение в сжатии информации для передачи или хранения, а также для шифрования.
Как спроектировать кодировщик 4: 2?
Энкодер 4: 2 имеет четыре входа и два выхода. По определению, кодировщик принимает максимальное значение каждого входа и выдает n-битный выход. По сути, вывод, который выводит кодировщик, является физическим адресом линии.1 = 2. Комбинация всех вторых входов равна 0010 (= 2 в десятичной системе).
Таким образом, выход энкодера дает физический адрес входов.
Таблица истинности кодировщика 4: 2
| А | В | С | Д | Y0 | Y1 |
| 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 1 |
| 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 0 | 1 | 1 |
Из приведенной выше таблицы истинности кодировщика 4: 2 Y0 = 1 при 0100 или 1000, поэтому
Y0 = A’BC’D ’+ AB’C’D’ = C’D ‘(
)Аналогично, Y1 = 1 в 0010 или 1000, поэтому
Y1 = A’B’CD ’+ AB’C’D’ = B’D ‘(
)Строя схему из приведенных выше уравнений, мы получаем следующую комбинационную логическую схему для кодировщика 4: 2.3 = 8).
Таблица истинности кодировщика 8: 3
| А | Б | К | Д | E | Ф | г | H | Y2 | Y1 | Y0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
Из приведенной выше таблицы истинности имеем
Y0 = G + E + C + A
Y1 = F + E + B + A
Y2 = A + B + C + D
Что такое приоритетный кодировщик? В чем разница между кодировщиками приоритета и кодировщиками?
Энкодеры, которые мы видели выше, известны как цифровые или двоичные энкодеры.Если вы посмотрите на их таблицы истинности, вы заметите, что вводные данные немного необычны. Все выходы возможны на входах, которые имеют только один старший бит. То есть выходы присутствуют только тогда, когда ровно один из входных битов равен 1. Это ограничивает объем данных, которые мы можем кодировать. Потому что, если какой-либо из входов имеет более одного бита, двоичный кодировщик выдаст нам ошибку.
Кодер приоритета преодолевает этот недостаток двоичного кодировщика. Он дает закодированный вывод, назначая приоритет битам ввода.Значения битов с более низким приоритетом не имеют значения. Если бит с более высоким приоритетом имеет высокий уровень, то кодер приоритета будет генерировать выходной сигнал в зависимости от положения старшего бита. Выходы такие же, как у энкодера, но диапазон входов выше, поскольку выход зависит только от бита высокого приоритета. Ознакомьтесь с приведенной ниже таблицей истинности, чтобы получить более четкое представление.
Как разработать кодировщик с приоритетом 4: 2?
Энкодер с приоритетом 4: 2 имеет четыре входа и два выхода, как обычный двоичный энкодер.Разница заключается в таблице истинности. Для кодировщика приоритета вывод зависит от бита наивысшего приоритета. Например, если биты I7, I6 и I0 8-битного входа имеют высокий уровень, то выход (111) будет соответствовать I7. Давайте напишем таблицу истинности для кодировщика с приоритетом 4: 2.
Таблица истинности кодировщика приоритета 4: 2
| I3 | I2 | I1 | I0 | А | Б |
| 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | х | 0 | 1 |
| 0 | 1 | х | х | 1 | 0 |
| 1 | х | х | х | 1 | 1 |
Здесь x обозначает состояние безразличия.Не имеет значения, равен ли этот бит 0 или 1.
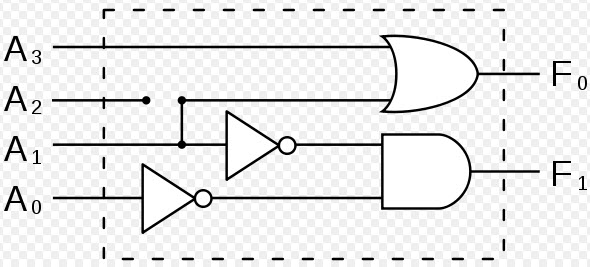
A высокий, когда I2 и I3 высокие. Независимо от того, что такое младшие биты. Значит, это означает, что A — один для
.А = 1
для 01xx, которое при расширении становится 0100, 0101, 0110, 0111. Таким образом, A высокий для всех четырех значений.
для 1xxx, которое при расширении становится 1000, 1001, 1010, 1011, 1100, 1101, 1110, 1111. Таким образом, A также является высоким для всех восьми из этих значений.
Построив K-карту для этих значений, на выходе A получим
А = I2 + I3
и для B
В = I3 + I1I2 ′
Из приведенных выше уравнений для A и B мы получаем следующую логическую схему для кодировщика с приоритетом 4: 2.
Кодер с приоритетом 4: 2 с использованием GatesКаковы преимущества и различия использования кодировщика приоритета по сравнению с двоичным кодировщиком?
Двоичные кодеры хорошо сжимают данные. Однако проблема с двоичными кодировщиками состоит в том, что если более чем один из входных битов имеет высокий уровень, на выходе возникает ошибка. В то время как кодеры приоритета были созданы для решения этой проблемы. Он дает вывод, учитывая только бит наивысшего приоритета. Благодаря этому факту и особенности кодировщики приоритета отлично справляются с обработкой запросов прерывания для микропроцессора.2 = 4 (= 0100 двоичный). Следовательно, выход для 10 будет 0100; то есть линия I2 будет высокой. Давайте спроектируем декодер 2: 4 и разберемся с его таблицей истинности.
Как разработать декодер 2: 4?
Декодер 2: 4 имеет два входа и четыре выхода.
Таблица истинности для декодера 2: 4
| А | В | Y3 | Y2 | Y1 | Y0 |
| 0 | 0 | 0 | 0 | 0 | 1 |
| 0 | 1 | 0 | 0 | 1 | 0 |
| 1 | 0 | 0 | 1 | 0 | 0 |
| 1 | 1 | 1 | 0 | 0 | 0 |
Из таблицы истинности декодера 2: 4 выше мы имеем Y0 = 1 при A = 0 и B = 0, поэтому
Y0 = A’B ’
Аналогично, Y1 = 1 при A = 0 и B = 1, таким образом,
Y1 = A’B
Аналогично
Y2 = AB ’
и
Y3 = AB
Построив схему из приведенных выше уравнений, мы получим следующую комбинационную логическую схему для декодера 2: 4
Декодер 2: 4Как спроектировать декодер 3: 8?
Декодер 3: 8 имеет три входа и восемь выходов.Давайте спроектируем его таблицу истинности и схему, используя логику, которую мы видели при проектировании декодера 2: 4.
Таблица истинности для декодера 3: 8
| А | Б | К | Y7 | Y6 | Y5 | Я4 | Y3 | Y2 | Y1 | Y0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
Из приведенной выше таблицы истинности
Y0 = A’B’C ’
Y1 = A’B’C
Y2 = A’BC ’
Y3 = A’BC
Y4 = AB’C ’
Y5 = AB’C
Y6 = ABC ’
Y7 = ABC
Результирующая логическая схема для декодера 3: 8 выглядит следующим образом.
3: 8 DecoderМы можем добавить вывод разрешения к микросхеме, просто добавив его к логическим элементам AND, поскольку логика AND требует, чтобы все входы были высокими, чтобы получить высокий выход. Просто добавив контакт включения ко всем внешним логическим элементам И, если мы хотим выключить декодер, мы можем сделать это, заземлив контакт включения.
Декодер 3: 8 с выводом включенияКак разработать декодеры 4:16?
Объединив два декодера 3: 8 вместе, мы можем получить декодер 4:16. Нам нужно 16 выходов, которые мы легко можем получить, так как мы используем два декодера 3: 8.Однако со стороны ввода нам нужно всего четыре входа. У нас шесть. Итак, мы добавляем контакт включения и делаем его четырьмя входами для каждого декодера 3: 8. Соединив восемь входных контактов вместе, мы можем получить четыре входа, которые нам нужны.
Однако один из выводов является разрешающим. И оба декодера 3: 8 не могут быть активны одновременно. Следовательно, разрешающий контакт второго декодера подключен к инвертору. Таким образом, одновременно работает только один из декодеров.
Декодер 4:16 с использованием двух декодеров 3: 8
Как спроектировать декодер 5:32?
Объединив четыре декодера 3: 8.И декодер 2: 4, управляющий разрешающими контактами всех декодеров 3: 8.
.
US Digital® | Сообщения в блоге
Что такое энкодер?
Хотите знать, что такое кодировщик и что он делает — или, может быть, просто как объяснить эти вещи кому-то за пределами индустрии управления движением? В этом посте мы рассмотрим некоторые основы кодировщика, чтобы вы могли лучше понять, или, возможно, просто более четко описать, что такое кодировщик и что он делает.
Энкодеры бывают разных конфигураций, но все они переводят физическое движение в электрический сигнал, который может интерпретироваться системой управления движением.Итак, что такое энкодер?
Энкодер — это датчик, преобразующий физическое движение в электрические данные. Эти данные могут использоваться для определения скорости, ускорения, направления и положения механической системы. Энкодеры могут отслеживать два разных типа движения. Линейные энкодеры отслеживают движение по прямой. Энкодеры отслеживают изменения вращения вала и часто присоединяются к двигателям.
С технической точки зрения измерительная машина для проводов, показанная на видео ниже, не совсем кодировщик, но дает представление о том, как она работает.Поскольку проволока физически перемещается от катушки на одной стороне машины к катушке на другой, трение перемещает два колеса посередине. Вращение нижнего колеса используется для определения длины провода, которая отображается на циферблатах на передней панели устройства. Поворотный энкодер может использоваться для того же самого, с той разницей, что на выходе энкодера будет цифровой сигнал, который может интерпретироваться компьютерной системой.
Кодеры
можно найти во всех типах оборудования во многих отраслях промышленности, включая солнечную энергию, аддитивное производство (также известное как 3D-печать), аэрокосмическую промышленность, робототехнику, медицину и текстильное производство — и это лишь некоторые из них.Часто вы даже найдете энкодеры, встроенные в двигатели, которые вы покупаете у дистрибьюторов запчастей для электроники и в каталогах.
Ищете несколько примеров того, как можно использовать кодировщики?
-
3D-принтер может использовать несколько линейных кодировщиков для отслеживания положения печатающей головки. Затем информацию от кодировщиков можно отправить обратно в систему управления движением, чтобы она могла проверить, находится ли печатающая головка в правильном положении для печати желаемого объекта.
-
Дельта-робот использует ряд двигателей для управления положением рук.Скорее всего, к каждому мотору прикреплен какой-то энкодер. Данные от каждого энкодера используются для понимания вращения вала каждого двигателя, которое влияет на положение конечного эффектора — «руки» робота.
-
Автоматическая сборочная линия может использовать датчики вращения для отслеживания движения конвейерной системы. С энкодером, прикрепленным к двигателю, который перемещает ремень, вращение вала и общее число оборотов можно использовать для экстраполяции расстояния, пройденного объектом на конвейере.
Итак, если вы хотите отслеживать скорость, ускорение, направление или положение механической системы, вы, вероятно, захотите серьезно взглянуть на энкодеры.
На нашем сайте мы предлагаем широкий выбор кодировщиков. Если у вас есть вопросы или вам нужна помощь в поиске подходящего для вашего проекта, не стесняйтесь обращаться к нам. Наши службы поддержки клиентов и службы технической поддержки более чем рады провести с вами время по телефону или электронной почте, чтобы помочь вам узнать больше.
.