Что такое драйвер двигателя. Какие бывают типы драйверов. Как правильно подобрать драйвер для шагового двигателя. На какие характеристики обращать внимание при выборе.
Что такое драйвер двигателя и для чего он нужен
Драйвер двигателя — это электронное устройство, которое управляет работой электродвигателя. Основная задача драйвера — преобразовывать управляющие сигналы низкого напряжения в токи и напряжения, необходимые для вращения двигателя.
Драйвер выполняет следующие ключевые функции:
- Усиливает управляющие сигналы до уровней, требуемых двигателем
- Обеспечивает необходимый ток и напряжение для обмоток двигателя
- Контролирует скорость и направление вращения двигателя
- Обеспечивает плавный пуск и остановку двигателя
- Защищает двигатель от перегрузок и повреждений
Без драйвера напрямую управлять мощным двигателем от микроконтроллера или компьютера невозможно. Драйвер является необходимым связующим звеном между системой управления и исполнительным механизмом.
Основные типы драйверов двигателей
Драйверы двигателей можно разделить на несколько основных типов:
1. Драйверы коллекторных двигателей постоянного тока
Используются для управления щеточными DC-моторами. Основные разновидности:
- Драйверы на основе H-моста
- ШИМ-драйверы
- Драйверы с линейным управлением
2. Драйверы бесколлекторных двигателей постоянного тока
Применяются для управления BLDC и PMSM моторами. Типы:
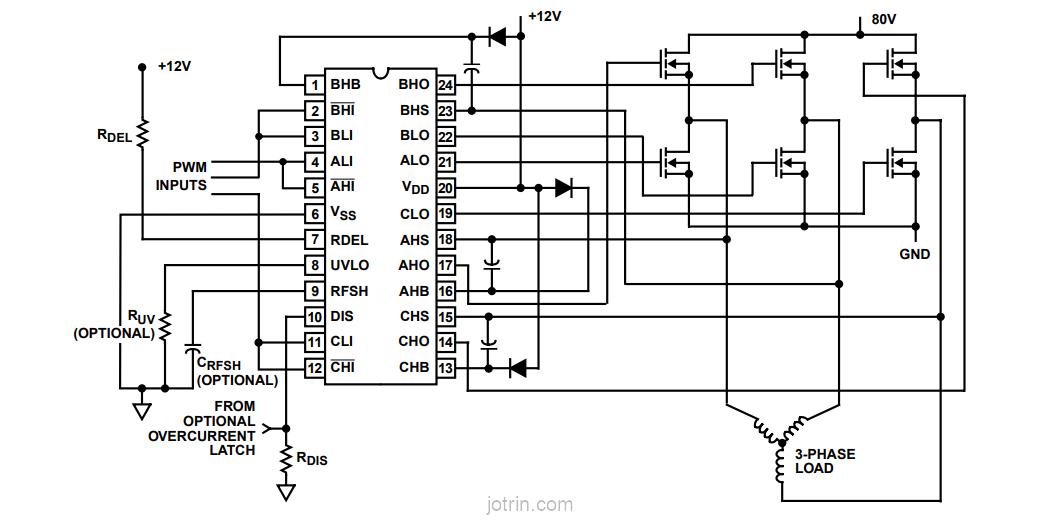
- Трехфазные инверторы
- Драйверы с датчиками Холла
- Бездатчиковые драйверы
3. Драйверы шаговых двигателей
Предназначены для прецизионного управления шаговыми двигателями. Разновидности:
- Биполярные драйверы
- Униполярные драйверы
- Микрошаговые драйверы
4. Драйверы сервоприводов
Используются в системах с обратной связью по положению. Типы:
- Аналоговые сервоусилители
- Цифровые сервоконтроллеры
Ключевые характеристики драйверов двигателей
При выборе драйвера двигателя необходимо учитывать следующие основные параметры:
Напряжение питания
Рабочий диапазон напряжений драйвера должен соответствовать напряжению питания двигателя. Типичные значения: 5-24В для маломощных драйверов, 24-80В для мощных.
Максимальный ток
Определяет мощность подключаемого двигателя. Варьируется от сотен мА до десятков ампер. Важно выбирать с запасом 20-30% от номинального тока двигателя.
Количество каналов
Одноканальные драйверы управляют одним двигателем, многоканальные — несколькими. Типичные варианты: 1, 2 или 4 канала.
Режимы управления
Основные варианты:
- ШИМ-управление
- Аналоговое управление
- Цифровое управление по интерфейсам (STEP/DIR, SPI, UART и др.)
Функции защиты
Современные драйверы обычно имеют встроенную защиту от:
- Перегрузки по току
- Перегрева
- Короткого замыкания
- Обратной полярности питания
Как правильно выбрать драйвер для шагового двигателя
Выбор оптимального драйвера для шагового двигателя — важная задача, от которой зависит эффективность работы всей системы. Рассмотрим основные критерии подбора:
1. Соответствие по току
Максимальный ток драйвера должен быть равен или немного превышать номинальный ток фазы шагового двигателя. Оптимально выбирать драйвер с запасом по току 15-40%.
2. Напряжение питания
Рабочее напряжение драйвера должно соответствовать напряжению двигателя. Часто используется эмпирическая формула: U = 32 * sqrt(L), где L — индуктивность обмотки двигателя в мГн.
3. Поддержка микрошагового режима
Микрошаг повышает плавность движения и точность позиционирования. Желательно выбирать драйвер с делением шага 1/8, 1/16 или 1/32.
4. Наличие функций защиты
Важно наличие защиты от перегрузки по току, перегрева, короткого замыкания. Также полезна оптическая изоляция входов управления.
5. Интерфейс управления
Драйвер должен поддерживать требуемый протокол управления, обычно это STEP/DIR для шаговых двигателей.
Популярные модели драйверов шаговых двигателей
Рассмотрим несколько распространенных моделей драйверов для шаговых двигателей:
1. A4988
Характеристики:
- Напряжение питания: 8-35В
- Максимальный ток: 2А
- Микрошаг: 1/16
- Защита от перегрева и перегрузки по току
2. DRV8825
Особенности:
- Напряжение питания: 8.2-45В
- Максимальный ток: 2.2А
- Микрошаг: до 1/32
- Улучшенная защита и более тихая работа по сравнению с A4988
3. TMC2208
Преимущества:
- Напряжение питания: 4.75-36В
- Максимальный ток: 1.4А (2А пиковый)
- Микрошаг: до 1/256
- Сверхтихая работа, интерфейс UART
Драйверы двигателей постоянного тока: особенности выбора
При выборе драйвера для коллекторного DC-мотора следует учитывать такие факторы:
1. Напряжение и ток двигателя
Драйвер должен обеспечивать требуемые напряжение и ток для конкретной модели двигателя. Важно выбирать с запасом по току.
2. Метод управления
Основные варианты:
- ШИМ-управление — для регулировки скорости
- Реверсивное управление — для изменения направления вращения
- Комбинированное ШИМ + реверс
3. Интерфейс управления
Зависит от используемого контроллера. Часто применяются:
- Аналоговый вход 0-5В
- ШИМ-вход
- Цифровые входы направления и скорости
4. Функции защиты и диагностики
Полезные возможности:
- Защита от перегрузки и перегрева
- Измерение тока двигателя
- Определение обрыва или замыкания в обмотках
Особенности драйверов бесколлекторных двигателей
Драйверы для BLDC и PMSM моторов имеют ряд отличительных характеристик:

1. Трехфазный выход
Для управления трехфазными обмотками бесколлекторного двигателя.
2. Датчики положения ротора
Могут использоваться:
- Датчики Холла
- Энкодеры
- Бездатчиковые методы (по противо-ЭДС)
3. Алгоритмы управления
Распространенные варианты:
- Трапецеидальное управление
- Синусоидальное управление
- Векторное управление (FOC)
4. Режимы работы
Типичные режимы:
- Управление скоростью
- Управление моментом
- Позиционирование
Выбор конкретного драйвера зависит от требований к динамике, точности и эффективности привода.
Драйверы двигателей
Сортировка: По умолчаниюНазвание (А — Я)Название (Я — А)Цена (низкая > высокая)Цена (высокая > низкая)Рейтинг (начиная с высокого)Рейтинг (начиная с низкого)Модель (А — Я)Модель (Я — А)
Выводить по: 25305075100
1
1662
В наличии: 16
1
790
В наличии: 42
Драйвер двигателей DRV8833
Плата на базе микросхемы DRV8833, драйвер для двух двигателей постоянн..
112 ₽
1
5470
В наличии: 37
Драйвер двигателей HG7881
Модуль драйвера двигателей на микросхеме HG7881. Возможно подключение ..
112 ₽
От 10шт. — 102 ₽
От 100шт. — 98.9 ₽
1
267
В наличии: 133
Драйвер двигателей L9110S
Модуль драйвера двигателей на микросхеме L9110S. Возможно подключение ..
Возможно подключение ..
89.5 ₽
1
2956
В наличии: 97
1
2900
В наличии: 33
Драйвер моторов на BTS7960 IBT-2
Драйвер мотора BTS7960 позволяет управлять одним коллекторным двигателем ра..
702 ₽
1
5045
В наличии: 52
Драйвер моторов на DRV8833 1.5А
Данный модуль драйвера является улучшенным аналогом этого же модуля но на м..
211 ₽
От 10шт. — 200 ₽
От 100шт. — 191 ₽
1
151
В наличии: 126
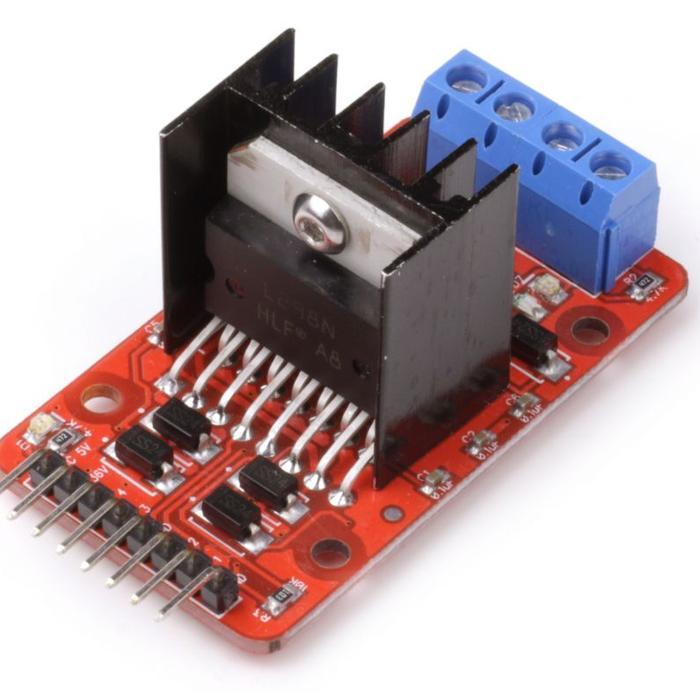
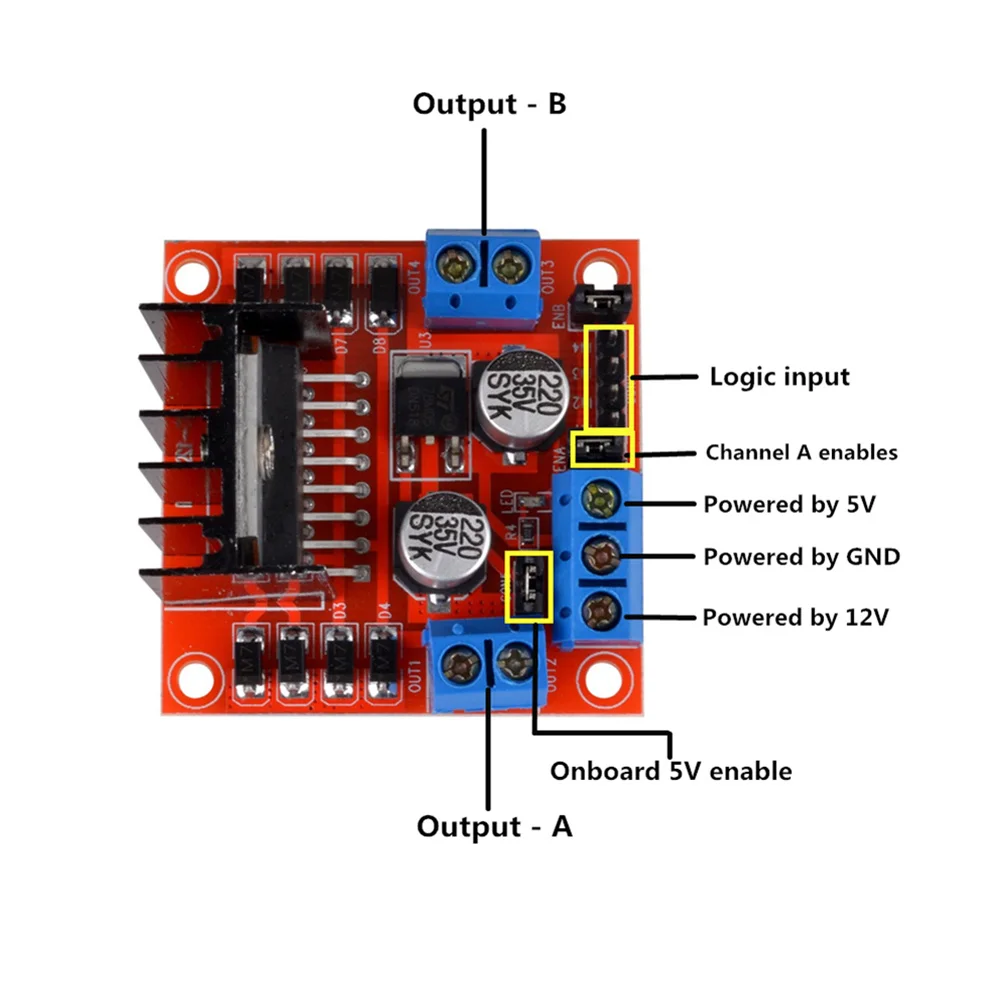
Драйвер моторов на L298N
Драйвер моторов использует чип ST L298N, может напрямую управлять двумя дви..
211 ₽
От 10шт. — 200 ₽
— 200 ₽
От 100шт. — 189 ₽
1
435
В наличии: 26
Драйвер моторов на TB6612FNG
Модуль 2-х канального драйвера на чипе TB6612FNG, предназначен для управлен..
460 ₽
От 10шт. — 168 ₽
1
5385
В наличии: 58
Драйвер моторов на чипе L293D
Драйвер L293D Mini подходит для управления 2 шаговыми, 2 серво или 4 обычны..
178 ₽
1
82
В наличии: 188
Драйвер на ULN2003
Ток нагрузки одного выхода предельный 500 мАНапряжение питания 5 или 12 ВРа..
78.2 ₽
От 10шт. — 66 ₽
1
3189
В наличии: 94
Драйвер на ULN2003ADR
Универсальный модуль драйвера двигателя на основе системы ULN2003. Вместе с..
Вместе с..
78.2 ₽
От 10шт. — 66 ₽
1
176
В наличии: 136Драйвер шагового двигателя A4988
Плата на базе микросхемы HR4988 — драйвера биполярного шагового двигателя. ..
120 ₽
От 4шт. — 112 ₽
От 10шт. — 108 ₽
От 100шт. — 102 ₽
1
286
В наличии: 147
Драйвер шагового двигателя DRV8825
Плата на базе микросхемы DRV8825 — драйвер шаговых биполярных двигател..
353 ₽
От 10шт. — 333 ₽
От 100шт. — 320 ₽
1
5458
В наличии: 10
Драйвер шагового двигателя LV8729
Драйвер для шаговых двигателей LV8729 используются в конструкции 3D-принтер..
640 ₽
От 4шт. — 610 ₽
— 610 ₽
От 100шт. — 590 ₽
1
899
В наличии: 38
Драйвер шагового двигателя TB6560
TB6560 V2 — драйвер управления двухфазными шаговыми двигателями выполнен на..
714 ₽
1
5403
В наличии: 95
Драйвер шагового двигателя TMC2208 V1.2
Драйвер шагового двигателя TMC2208 V1.2 – более мощная и ультра-тихая верси..
418 ₽
От 4шт. — 386 ₽
От 12шт. — 375 ₽
От 100шт. — 353 ₽
1
5404
В наличии: 121
1
9798
В наличии: 15
ШИМ генератор MKS OSC V1.0
ШИМ генератор MKS OSC V1.0 предназначен для управления шаговым мотором при ..
490 ₽
602
Драйвер двигателей MX1508
Модуль драйвера двигателей на микросхеме MX1508. Возможно подключение ..
Возможно подключение ..
60.3 ₽
От 10шт. — 57.3 ₽
От 100шт. — 55 ₽
575
432
Драйвер двигателя VNh3SP30
Мощный драйвер двигателей, рабочий ток — 14А, и до 30А краткосрочно (продол..
1084 ₽
1290
Драйвер шагового двигателя A3967 EasyDriver
EasyDriver построен на микросхеме A3967 от Allegro. Она предназначена для к..
211 ₽
От 10шт. — 200 ₽
От 100шт. — 189 ₽
9806
1030
901
Драйвер шагового двигателя TB6600
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на ..
877 ₽
Показано с 1 по 26 из 26 (всего 1 страниц)
Драйвер шагового двигателя — как выбрать?
Драйвер шагового двигателя
Краткое введение в теорию и типы драйверов, советы по подбору оптимального драйвера для шагового двигателя.
Некоторые сведения, которые могут помочь вам выбрать драйвер шагового двигателя.
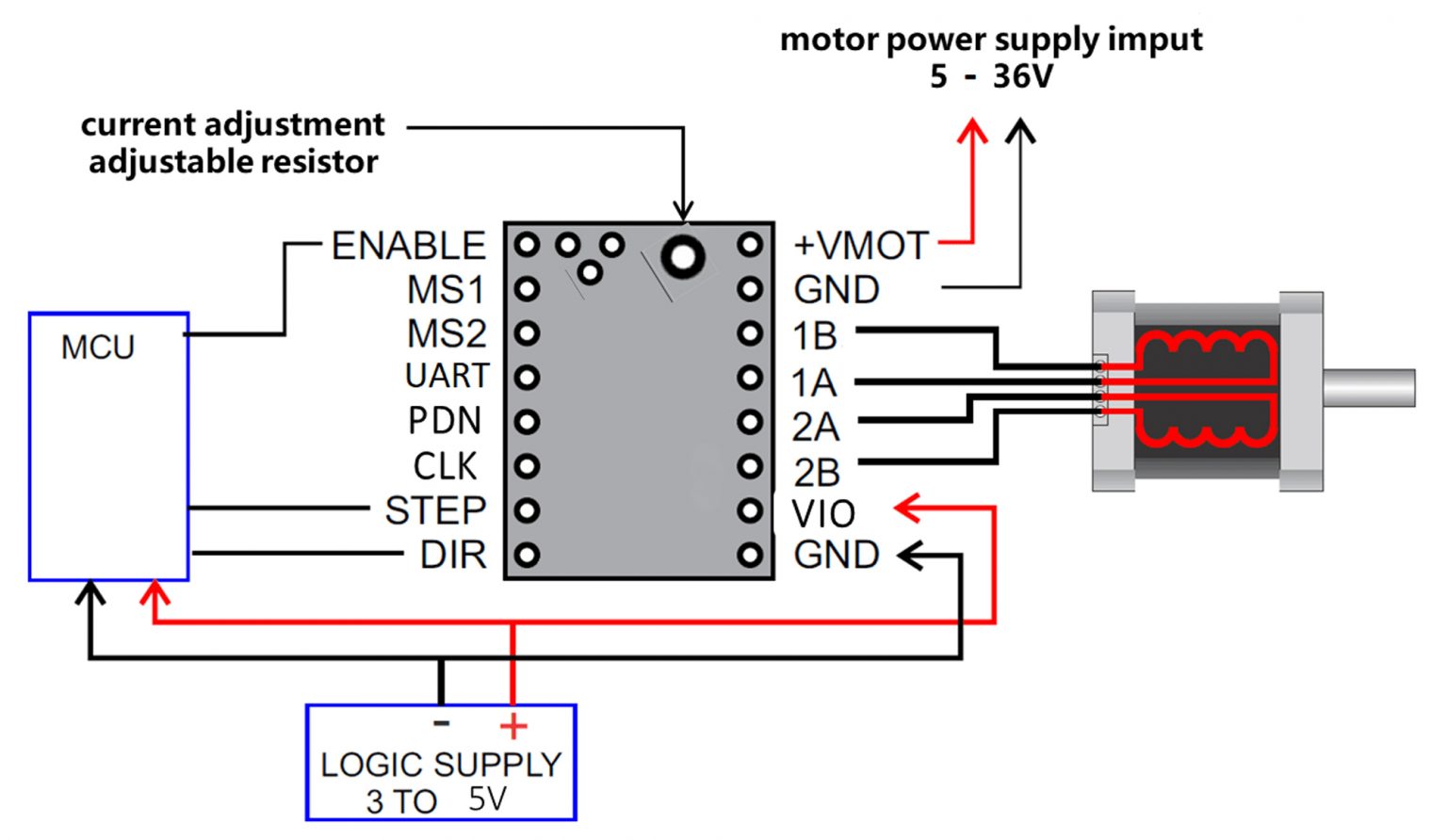
Шаговый двигатель – двигатель со сложной схемой управления, которому требуется специальное электронное устройство – драйвер шагового двигателя. Драйвер шагового двигателя получает на входе логические сигналы STEP/DIR, которые, как правило, представлены высоким и низким уровнем опорного напряжения 5 В, и в соответствии с полученными сигналами изменяет ток в обмотках двигателя, заставляя вал поворачиваться в соответствующем направлении на заданный угол. >Сигналы STEP/DIR генерируются ЧПУ-контроллером или персональным компьютером, на котором работает программа управления типа Mach4 или LinuxCNC.
Задача драйвера – изменять ток в обмотках как можно более эффективно, а поскольку индуктивность обмоток и ротор гибридного шагового двигателя постоянно вмешиваются в этот процесс, то драйверы весьма отличаются друг от друга своими характеристиками и качеством получаемого движения. Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Ток, протекающий в обмотках, определяет движение ротора: величина тока задает крутящий момент, его динамика влияет на равномерность и т.п.
Типы (виды) драйверов ШД
Драйверы делятся по способу закачки тока в обмотки на несколько видов:
1) Драйверы постоянного напряжения
Эти драйверы подают постоянный уровень напряжения поочередно на обмотки, результирующий ток зависит от сопротивления обмотки, а на высоких скоростях – и от индуктивности. Эти драйверы крайне неэффективны, и могут быть использованы только на очень малых скоростях.
2) Двухуровневые драйверы
В драйверах этого типа ток в обмотке сперва поднимается до нужного уровня с помощью высокого напряжения, затем источник высокого напряжения отключается, и нужная сила тока поддерживается источником малого напряжения. Такие драйверы достаточно эффективны, помимо прочего они снижают нагрев двигателей, и их все еще можно иногда встретить в высококлассном оборудовании. Однако, такие драйверы поддерживают только режим шага и полушага.
Однако, такие драйверы поддерживают только режим шага и полушага.
3) Драйверы с ШИМ.
На текущий момент ШИМ-драйверы шаговых двигателей наиболее популярны, практически все драйверы на рынке – этого типа. Эти драйверы подают на обмотку шагового мотора ШИМ-сигнал очень высокого напряжения, которое отсекается по достижению током необходимого уровня. Величина силы тока, по которой происходит отсечка, задается либо потенциометром, либо DIP-переключателем, иногда эта величина программируется с помощью специального ПО. Эти драйверы достаточно интеллектуальны, и снабжены множеством дополнительных функций, поддерживают разные деления шага, что позволяет увеличить дискретность позиционирования и плавность хода. Однако, ШИМ-драйверы также весьма сильно отличаются друг от друга. Помимо таких характеристик, как питающее напряжение и максимальный ток обмотки, у них отличается частота ШИМ. Лучше, если частота драйвера будет более 20 кГц, и вообще, чем она больше – тем лучше. Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Частота ниже 20 кГц ухудшает ходовые характеристики двигателей и попадает в слышимый диапазон, шаговые моторы начинают издавать неприятный писк. Драйверы шаговых двигателей вслед за самими двигателями делятся на униполярные и биполярные. Начинающим станкостроителям настоятельно рекомендуем не экспериментировать с приводами, а выбрать те, по которым можно получить максимальный объем технической поддержки, информации и для которых продукты на рынке представлены наиболее широко. Такими являются драйверы биполярных гибридных шаговых двигателей.
Ниже будут описаны только практические рекомендации по выбору ШИМ-драйвера биполярного шагового двигателя. При этом предполагается, что Вы уже определились с моделью двигателя, его характеристиками и т.п.
Как выбрать драйвер шагового двигателя (ШД)
Первый параметр, на который стоит обратить внимание, когда вы решили выбрать драйвер шагового двигателя – это сила тока, которую может обеспечить драйвер. Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Как правило, она регулируется в достаточно широких пределах, но стоит драйвер нужно выбирать такой, который может выдавать ток, равный току фазы выбранного шагового двигателя. Желательно, конечно, чтобы максимальная сила тока драйвера была еще на 15-40% больше. С одной стороны, это даст запас на случай, если вы захотите получить больший момент от мотора, или в будущем поставите более мощный двигатель, с другой – не будет излишней: производители иногда «подгоняют» номиналы радиоэлектронных компонентов к тому или иному виду/размеру двигателей, поэтому слишком мощный драйвер на 8 А, управляющий двигателем NEMA 17 (42 мм), может, к примеру, вызывать излишние вибрации.
Второй момент – это напряжение питания. Весьма важный и неоднозначный параметр. Его влияние достаточно многогранно – напряжение питания влияет на динамику(момент на высоких оборотах), вибрации, нагрев двигателя и драйвера. Обычно максимальное напряжение питания драйвера примерно равно максимальному току I, умноженному на 8-10.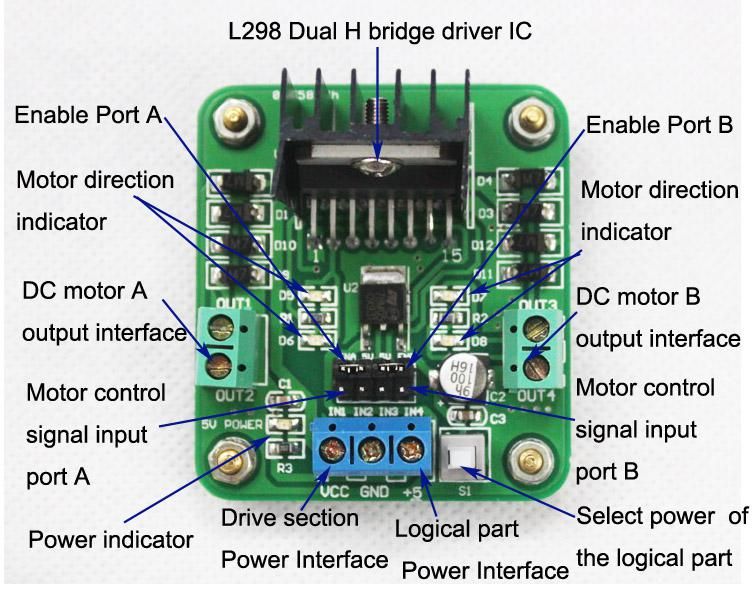 Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Если максимальное указанное напряжение питания драйвера резко отличается от данных величин – стоит дополнительно поинтересоваться, в чем причина такой разницы. Чем больше индуктивность двигателя — тем большее напряжение требуется для драйвера. Существует эмпирическая формула U = 32 * sqrt(L), где L — индуктивность обмотки шагового двигателя. Величина U, получаемая по этой формуле, весьма приблизительная, но она позволяет ориентироваться при выборе драйвера: U должно примерно равняться максимальному значению напряжения питания драйвера. Если вы получили U равным 70, то по данному критерию проходят драйверы EM706, AM882, YKC2608M-H.
Третий аспект – наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер – устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера.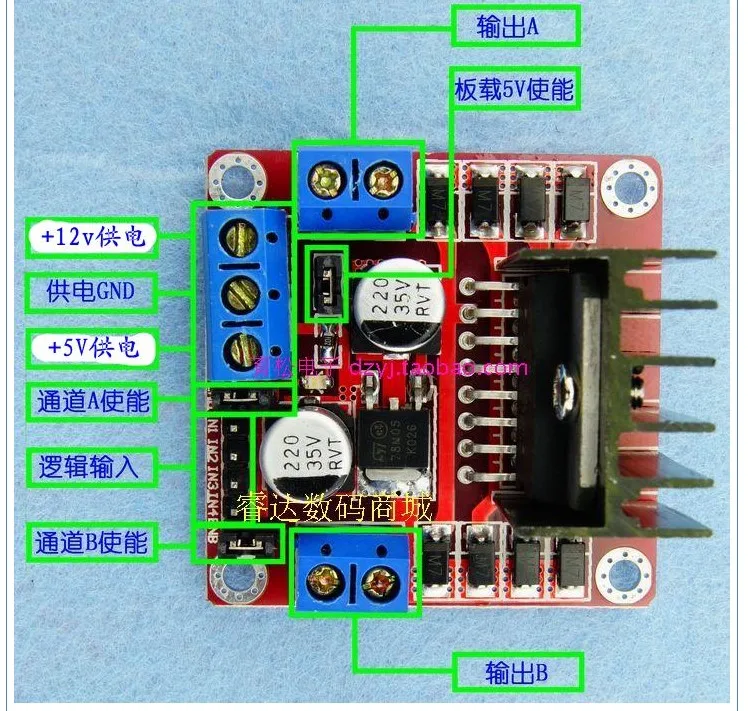 Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Однако, если вы решили выбрать драйвер ШД незнакомой модели, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Четвертый аспект – наличие механизмов подавления резонанса. Резонанс шагового двигателя – явление, которое проявляется всегда, разница только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и – встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга – такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Механизм подавления резонанса встроен во все >драйверы Leadshine серий DM, AM и EM. Драйверы с подавлением резонанса – высококачественные драйверы, и если бюджет позволяет – лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим устройством – основная масса проданных драйверов – без компенсации резонанса, и тем не менее десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Пятый аспект – протокольная часть. Надо убедиться, что драйвер работает по нужному вам протоколу, а уровни входных сигналов совместимы с требуемыми Вам логическими уровнями. Эта проверка идет пятым пунктом, потому что за редким исключением подавляющее число драйверов работает по протоколу STEP/DIR/ENABLE и совместимо с уровнем сигналов 0..5 В, вам надо только лишь на всякий случай убедиться.
Шестой аспект – наличие защитных функций. Среди них защита от превышения питающего напряжения, тока обмоток(в т. ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
ч. от короткого замыкания обмоток), от переполюсовки питающего напряжения, от неправильного подключения фаз шагового мотора. Чем больше таких функций — тем лучше.
Седьмой аспект – наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако, из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако, практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, при прочих равных условиях стоит использовать деление чем больше, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов – так, для драйвера со входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ контроллер, то 100 кГц скорее всего будет Вашим потолком, что соответствует делению 1/32.
Восьмой аспект – наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т.п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Девятый, и самый важный аспект – качество драйвера. Оно практически не связано с характеристиками и т.п. На рынке существует множество предложений, и иногда характеристики драйверов двух производителей совпадают практически до запятой, а установив их по очереди на станок, становится ясно, что один из производителей явно занимается не своим делом, и в производстве недорогих утюгов ему больше повезет. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как «stall detect» или подавление резонанса, а также воспользоваться проверенным способом — ориентироваться на бренды.
В разработке электроники для шаговых двигателей давно удерживает пальму первенства корпорация Leadshine, продукцию которой мы и рекомендуем использовать в станках с ЧПУ.
DARXTON
Pololu — Драйверы щеточных двигателей постоянного тока
Эти приводы двигателей предназначены для использования с щеточными двигателями постоянного тока, такими как наши металлические мотор-редукторы или пластиковые мотор-редукторы. У нас есть много различных плат драйверов двигателей, которые предлагают множество функций в широком диапазоне рабочих напряжений и токов. Эти модули, как правило, представляют собой базовые платы-носители для выбора микросхем драйверов двигателей или дискретных H-мостов на основе полевых МОП-транзисторов. Они предлагают низкоуровневые интерфейсы, такие как ШИМ и цифровые входы высокого/низкого уровня. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер. Некоторые из наших драйверов двигателей доступны в форм-факторе платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Кроме того, некоторые из них доступны в форм-факторе платы расширения Raspberry Pi для легкой интеграции с совместимыми платами Raspberry Pi (модель B+ или новее). В приведенных ниже таблицах представлено сравнение основных характеристик и спецификаций наших приводов двигателей.
Они предлагают низкоуровневые интерфейсы, такие как ШИМ и цифровые входы высокого/низкого уровня. Для генерации этих сигналов низкого уровня обычно требуется внешний микроконтроллер. Некоторые из наших драйверов двигателей доступны в форм-факторе платы Arduino, но их также можно использовать с другими контроллерами в качестве драйверов двигателей общего назначения. Кроме того, некоторые из них доступны в форм-факторе платы расширения Raspberry Pi для легкой интеграции с совместимыми платами Raspberry Pi (модель B+ или новее). В приведенных ниже таблицах представлено сравнение основных характеристик и спецификаций наших приводов двигателей.
| Драйверы двигателей малой мощности | ||||||
|---|---|---|---|---|---|---|
| ДРВ8838 |
БД65496МУВ |
ДРВ8835 |
ДРВ8833 |
А4990 |
ТБ6612ФНГ |
|
| Каналы двигателя: | одиночный | одиночный | двойной | двойной | двойной | двойной |
Мин. рабочее напряжение: рабочее напряжение: |
0 В | 2 В | 0 В | 2,7 В | 6 В | 4,5 В |
| Макс. рабочее напряжение: | 11 В | 16 В | 11 В | 10,8 В | 32 В | 13,5 В |
| Макс. постоянный ток (1) : | 1,7 А | 1,2 А | 1,2 А | 1,2 А | 0,7 А | 1 А |
| Пиковый ток: | 1,8 А | 5 А | 1,5 А | 2 А | 0,9 А | 3 А |
| Текущая обратная связь? | — | — | — | — | — | — |
| Активное ограничение тока: | — | — | — | регулируемый | 0,9А | — |
| Размер: | 0,4″ × 0,5″ | 0,6″ × 0,6″ | 0,4″ × 0,7″ | 0,5″ × 0,8″ | 0,6″ × 0,8″ | 0,6″ × 0,8″ |
| Доступна версия Shield?: | — | — | Да | — | Да | — |
| Расширение Raspberry Pi версии доступно?: |
— | — | Да | — | — | — |
Цена за 1 шт.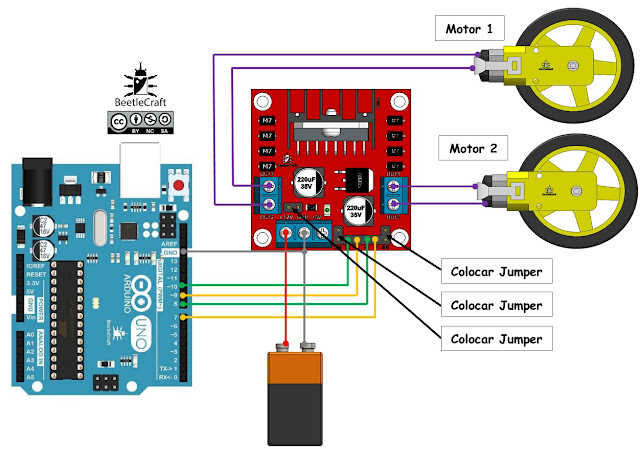 : : |
7,95 $ | 11,95 $ | 9,95 $ | 11,95 $ | 7,95 $ | 9,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||
| Приводы двигателей средней мощности | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| ДРВ8801 |
DRV8876 (QFN) |
ДРВ8876 |
ДРВ8874 |
ДРВ8256Е ДРВ8256П |
МАКС14870 |
MC33926 |
ТБ9051ФТГ |
ТБ67Х420ФТГ |
ВНХ5019 |
|
| Каналы двигателя: | одиночный | одиночный | сингл | одиночный | одиночный | одинарный / двойной | одинарный / двойной | одинарный / двойной | одинарный / двойной | одинарный / двойной |
Мин. рабочее напряжение: рабочее напряжение: |
8 В | 4,5 В | 4,5 В | 4,5 В | 4,5 В | 4,5 В | 5 В | 4,5 В | 10 В | 5,5 В |
| Макс. рабочее напряжение: | 36 В | 37 В | 37 В | 37 В | 48 В | 36 В | 28 В | 28 В | 47 В | 24 В |
| Макс. постоянный ток (1) : | 1 А | 1,1 А | 1,3 А | 2.1 А | 1,9 А | 1,7 А | 2,5 А | 2,6 А | 3,4 А / 1,7 А | 12 А |
| Пиковый ток: | 2,8 А | 3,5 А | 3,5 А | 6 А | 6,4 А | 2,5 А | 5 А | 5 А | 9 А / 4,5 А | 30 А |
| Текущая обратная связь? | 500 мВ/А | 2500 мВ/А | 2500 мВ/А | 1100 мВ/А | — | — | 525 мВ/А | 500 мВ/А | — | 140 мВ/А |
| Активное ограничение тока: | — | регулируемый | регулируемый | регулируемый | регулируемый | регулируемый | — | — | 9 А / 4,5 А | — |
| Размер: | 0,6″ × 0,6″ | 0,6″ × 0,7″ | 0,6″ × 0,7″ | 0,6″ × 0,7″ | 0,6″ × 0,6″ | 0,6″ × 0,5″ | 1,2″ × 1,0″ | 1,0″ × 1,0″ | 1,2″ × 1,0″ | 1,5″ × 1,1″ |
| Доступна версия Shield?: | — | — | — | — | — | Да | Да | Да | — | Да |
| Расширение Raspberry Pi версии доступно?: |
— | — | — | — | — | Да | Да | Да | — | — |
Цена за 1 шт. : : |
12,95 $ | 5,95 $ | 6,95 $ | 9,95 $ | 12,95 долл. США (E) 12,95 долл. США (P) |
14,95 $ | 34,95 $ | 11,95 $ | 14,95 $ | 59,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||||||
| Приводы мощных двигателей | ||||||||
|---|---|---|---|---|---|---|---|---|
| Г2 18в17 |
Г2 18в25 |
Г2 24в13 |
Г2 24в21 |
Г2 18в18 |
Г2 18в22 |
Г2 24в14 |
Г2 24в18 |
|
| Каналы двигателя: | одиночный | двойной | ||||||
| Мин. рабочее напряжение: | 6,5 В | 6,5 В | ||||||
| Макс. рабочее напряжение: | 30 В | 40 В | 30 В | 40 В | ||||
Макс.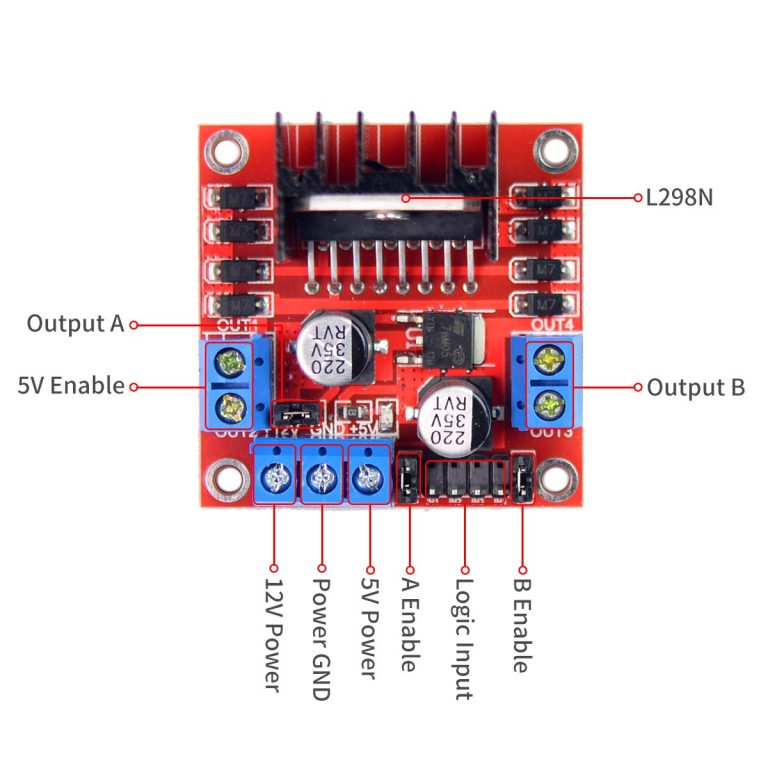 постоянный ток (1) : постоянный ток (1) : |
17 А | 25 А | 13 А | 21 А | 18 А | 22 А | 14 А | 18 А |
| Текущая обратная связь? | 20 мВ/А | 10 мВ/А | 40 мВ/А | 20 мВ/А | 20 мВ/А | 10 мВ/А | 20 мВ/А | 20 мВ/А |
| Активное ограничение тока: | 40 А регулируемый |
60 А регулируемый |
30 А регулируемый |
50 А регулируемый |
50 А регулируемый |
60 А регулируемый |
40 А регулируемый |
50 А регулируемый |
| Размер: | 1,3″ × 0,8″ | 2,56″ × 2,02″ | ||||||
| Доступна версия Shield?: | — | — | — | — | Да | Да | Да | Да |
| Расширение Raspberry Pi версии доступно?: |
— | — | — | — | Да | Да | Да | Да |
Цена за 1 шт. : : |
49,95 $ | 59,95 $ | 69,95 $ | 69,95 $ | 79,95 $ | $99,95 | 119,95 $ | 119,95 $ |
| 1 На канал двигателя, на несущей плате Pololu, при комнатной температуре и без дополнительного охлаждения. | ||||||||
Сравните все товары в этой категории
Подкатегории
Товары в категории «Драйверы двигателей постоянного тока с щетками»
Заставьте Arduino двигаться! Этот экран упрощает управление двумя мощными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные надежные драйверы двигателей VNH5019 работают от 5,5 до 24 В и могут обеспечивать постоянную подачу 12 А (30 А в пиковом режиме) на двигатель или 24 А (60 А в пиковом режиме) на один двигатель, подключенный к обоим каналам. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта несущая плата для ИС драйвера двигателя ST VNH5019 работает от 5,5 до 24 В и может обеспечивать непрерывный ток 12 А (пиковое значение 30 А). Он работает с логическими уровнями от 2,5 до 5 В, поддерживает ультразвуковую (до 20 кГц) ШИМ и имеет обратную связь по току (аналоговое напряжение, пропорциональное току двигателя). Наряду со встроенной защитой от обратного напряжения, перенапряжения, пониженного напряжения, перегрева и перегрузки по току эти функции делают этот продукт отличным драйвером двигателя общего назначения.
Эта коммутационная плата упрощает использование драйвера коллекторных двигателей постоянного тока Toshiba TB67h520FTG, который может работать либо в двухканальном режиме для независимого двунаправленного управления двумя двигателями, либо в одноканальном режиме для управления одним двигателем с повышенным током. Он имеет широкий диапазон рабочего напряжения от 10 В до 47 В и может непрерывно подавать 1,7 А на каждый канал двигателя или 3,4 А в одноканальном режиме. Настраиваемый порог прерывания тока позволяет TB67h520 активно ограничивать ток двигателя, а также имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Он имеет широкий диапазон рабочего напряжения от 10 В до 47 В и может непрерывно подавать 1,7 А на каждый канал двигателя или 3,4 А в одноканальном режиме. Настраиваемый порог прерывания тока позволяет TB67h520 активно ограничивать ток двигателя, а также имеет встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наша несущая плата также добавляет защиту от обратного напряжения (до 40 В).
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его двойные драйверы двигателей TB9051FTG работают от 4,5 до 28 В и могут обеспечить постоянную подачу 2,6 А на двигатель (5 А в пиковом режиме). Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Фиксированный порог прерывания тока позволяет каждому TB9051 ограничивать пиковый ток двигателя, и они имеют встроенную защиту от пониженного напряжения, перегрузки по току и перегрева; наш щит также добавляет защиту от обратного напряжения. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта дополнительная плата позволяет Raspberry Pi (модель B+ или новее) управлять парой коллекторных двигателей постоянного тока. Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект разъемы для сквозных отверстий не припаяны.
Эта дополнительная плата позволяет Raspberry Pi B+, Pi A+, Pi 2 или Pi 3 управлять парой коллекторных двигателей постоянного тока.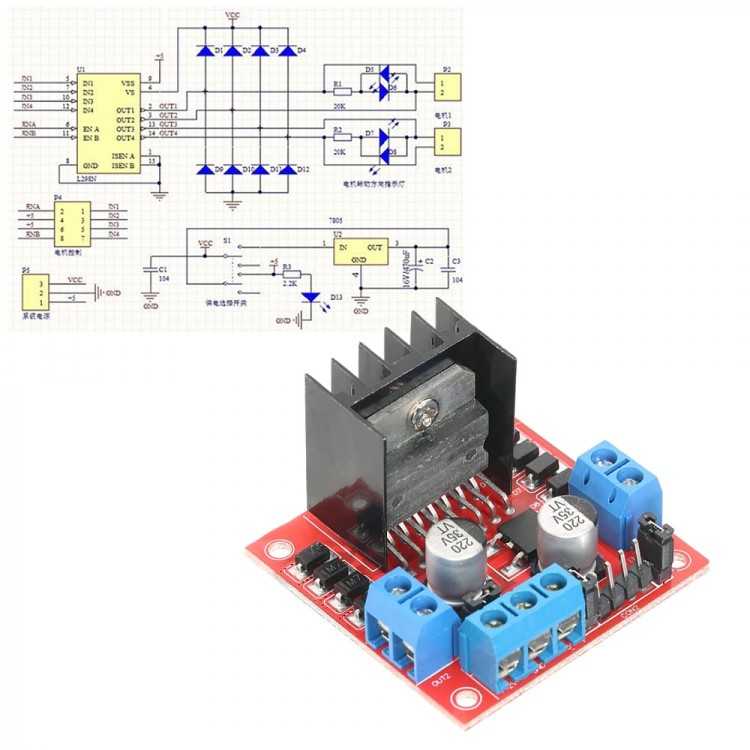 Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется полностью собранной с припаянными разъемами.051FTG Драйвер коллекторного двигателя постоянного тока. Он имеет широкий диапазон рабочего напряжения от 4,5 В до 28 В и может обеспечивать непрерывный ток 2,6 А. Фиксированный порог прерывания тока позволяет TB9051 ограничивать пиковый ток двигателя, а также он имеет встроенную защиту от пониженного напряжения, перенапряжения. текущие и температурные условия; наша несущая плата также добавляет защиту от обратного напряжения.
Двойные драйверы двигателей TB9051FTG работают от 4,5 В до 28 В и могут обеспечить непрерывную подачу 2,6 А (пиковое значение 5 А) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется полностью собранной с припаянными разъемами.051FTG Драйвер коллекторного двигателя постоянного тока. Он имеет широкий диапазон рабочего напряжения от 4,5 В до 28 В и может обеспечивать непрерывный ток 2,6 А. Фиксированный порог прерывания тока позволяет TB9051 ограничивать пиковый ток двигателя, а также он имеет встроенную защиту от пониженного напряжения, перенапряжения. текущие и температурные условия; наша несущая плата также добавляет защиту от обратного напряжения.
Этот экран позволяет легко управлять двумя щеточными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino.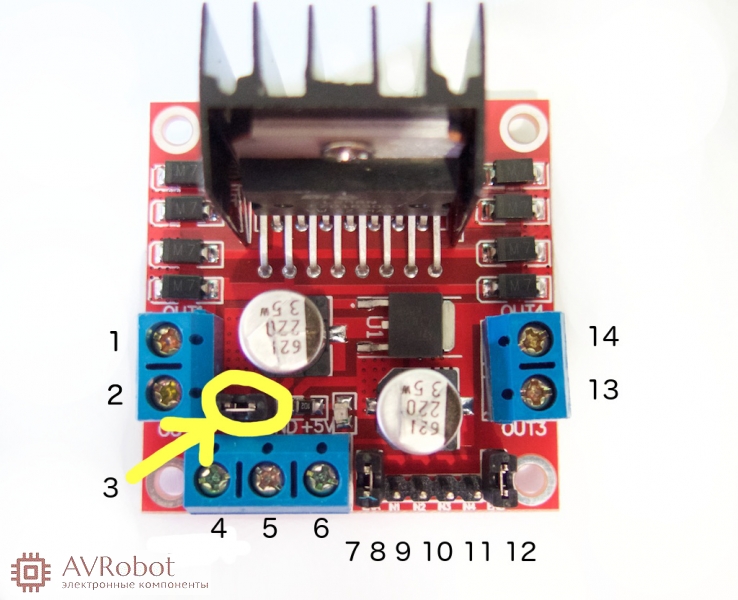 Его двойной MC33926 драйверов двигателей работают от 5 до 28 В и могут обеспечить постоянную подачу 3 А на двигатель. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Его двойной MC33926 драйверов двигателей работают от 5 до 28 В и могут обеспечить постоянную подачу 3 А на двигатель. Эти великолепные драйверы также обеспечивают обратную связь по току и принимают ультразвуковые частоты ШИМ для более тихой работы. Все сопоставления контактов Arduino можно настроить, если значения по умолчанию неудобны, а линии управления драйвером двигателя выведены вдоль левой стороны экрана для общего использования без Arduino.
Эта дополнительная плата позволяет совместимому Raspberry Pi (модель B+ или новее), включая модели Pi 3 B+ и модель A+, управлять парой коллекторных двигателей постоянного тока. Его двойной MC33926 драйверов двигателей работают от 5 В до 28 В и могут обеспечить постоянную подачу 3 А (5 А пик) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект сквозные разъемы не припаяны.
Эта дополнительная плата позволяет Raspberry Pi B+, A+, Pi 2 или Pi 3 управлять парой коллекторных двигателей постоянного тока. Его двойной MC33926 драйверов двигателей работают от 5 В до 28 В и могут обеспечить постоянную подачу 3 А (5 А пик) на двигатель. Сопоставление контактов по умолчанию позволяет легко начать работу с нашим программным обеспечением, но плата также предоставляет большинство контактов ввода-вывода микросхем драйверов для более специализированных приложений. Эта версия поставляется в полностью собранном виде с впаянными разъемами.
Этот драйвер двигателя постоянного тока с двумя щетками, основанный на полном H-мосте Freescale MC33926, имеет широкий рабочий диапазон от 5 В до 28 В и может непрерывно выдавать почти 3 А (5 пик) к каждому из двух его двигательных каналов. MC33926 работает с логическими уровнями от 3 В до 5 В, поддерживает ультразвуковую ШИМ (до 20 кГц) и имеет обратную связь по току, защиту от пониженного напряжения, защиту от перегрузки по току и защиту от перегрева.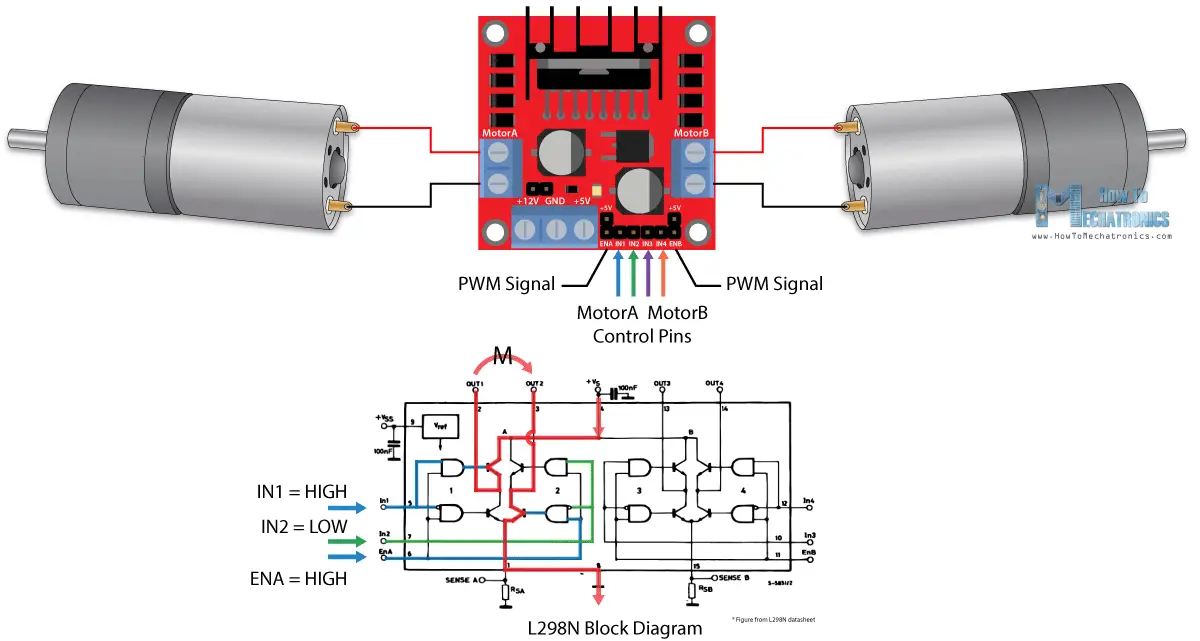
Эта коммутационная плата для полного Н-моста Freescale MC33926 имеет рабочий диапазон от 5 В до 28 В и может непрерывно подавать почти 3 А (пиковое значение 5 А) на двигатель постоянного тока. MC33926 работает с логическими уровнями от 3 В до 5 В, поддерживает ультразвуковую ШИМ (до 20 кГц) и имеет обратную связь по току, защиту от пониженного напряжения, защиту от перегрузки по току и защиту от перегрева.
Эта компактная коммутационная плата для драйвера двигателя DRV8256E компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 48 В и может обеспечить постоянную подачу 1,9 А (6,4 А пикового значения в течение <1 секунды) для одного коллекторного двигателя постоянного тока. Он имеет простой двухконтактный интерфейс скорости/направления и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта компактная коммутационная плата для драйвера двигателя TI DRV8256P обеспечивает широкий диапазон рабочего напряжения от 4,5 В до 48 В и может обеспечить непрерывную работу 1,9A (6,4 А пик в течение <1 секунды) на один коллекторный двигатель постоянного тока. Он оснащен двухконтактным интерфейсом IN/IN для прямого управления выходами двигателя и встроенной защитой от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Он оснащен двухконтактным интерфейсом IN/IN для прямого управления выходами двигателя и встроенной защитой от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта компактная коммутационная плата для драйвера двигателя DRV8874 компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может обеспечить постоянную подачу 2,1 А (пиковое значение 6 А) на один двунаправленный коллекторный двигатель постоянного тока. DRV8874 также имеет встроенные датчики и регуляторы тока, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Плата-носитель добавляет защиту от обратного напряжения.
Эта компактная коммутационная плата для драйвера двигателя DRV8876 компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может обеспечивать непрерывный ток 1,3 А (3,5 А пик) для одного двунаправленного коллекторного двигателя постоянного тока. DRV8876 также имеет встроенные датчики и регуляторы тока, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Плата-носитель добавляет защиту от обратного напряжения.
Плата-носитель добавляет защиту от обратного напряжения.
Эта компактная коммутационная плата для драйвера двигателя DRV8876 компании TI предлагает широкий диапазон рабочего напряжения от 4,5 В до 37 В и может подавать непрерывный ток 1,1 А (пиковое значение 3,5 А) на один двунаправленный коллекторный двигатель постоянного тока. DRV8876 также имеет встроенные датчики и регуляторы тока, а также встроенную защиту от пониженного напряжения, перегрузки по току и перегрева. Плата-носитель добавляет защиту от обратного напряжения.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Два встроенных драйвера двигателей MAX14870 позволяют ему работать от 4,5 В до 36 В, что делает его идеальным для двигателей и приложений с более высоким напряжением, а экран выдерживает 1,7 А в непрерывном режиме (2,5 А в пиковом режиме) на двигатель. Экран можно дополнительно настроить для питания Arduino от того же источника питания, что и драйвер двигателя, а сопоставление контактов Arduino можно настроить (путем обрезки дорожек), если значения по умолчанию неудобны.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Пара встроенных драйверов двигателей MAX14870 позволяет ему работать от 4,5 В до 36 В, что делает его отличным вариантом управления небольшими двигателями, работающими в широком диапазоне напряжений. Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется как частичный комплект ; все компоненты для поверхностного монтажа установлены, но входящие в комплект разъемы для сквозных отверстий не припаяны.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Пара встроенных драйверов двигателей MAX14870 позволяет ему работать от 4,5 В до 36 В, что делает его отличным вариантом управления небольшими двигателями, работающими в широком диапазоне напряжений. Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется полностью собранной с припаянными разъемами.
Плата может выдавать непрерывный ток 1,7 А (пиковое значение 2,5 А) на двигатель. Эта версия поставляется полностью собранной с припаянными разъемами.
Эта компактная коммутационная плата для драйвера двигателя MAX14870 компании Maxim предлагает широкий диапазон рабочего напряжения от 4,5 В до 36 В и может обеспечивать непрерывный ток 1,7 А (пиковое значение 2,5 А) для одного коллекторного двигателя постоянного тока. Он имеет простой двухконтактный интерфейс скорости/направления и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева.
Эта крошечная коммутационная плата для двухмоторного драйвера TI DRV8833 может непрерывно подавать 1,2 А на канал (пиковое значение 2 А) на пару двигателей постоянного тока. Благодаря диапазону рабочего напряжения от 2,7 В до 10,8 В и встроенной защите от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева этот драйвер является отличным решением для питания небольших низковольтных двигателей.
Эта крошечная коммутационная плата для двухдвигательного драйвера TI DRV8835 может непрерывно подавать 1,2 А на канал (1,5 А пикового значения) на пару двигателей постоянного тока и поддерживает два возможных интерфейса управления для дополнительной гибкости использования: IN/IN и PHASE/ ВКЛЮЧИТЬ. Имея диапазон рабочего напряжения от 0 В до 11 В и встроенную защиту от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева, этот драйвер является отличным решением для питания до двух небольших низковольтных моторы. Несущая плата имеет форм-фактор 14-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и перфорированными платами размером 0,1 дюйма.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать от 1,5 В до 11 В, что делает его отличным вариантом управления для низковольтных двигателей. Экран может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или непрерывный ток 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Экран может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или непрерывный ток 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Эта компактная плата расширения подключается непосредственно к разъему GPIO на Raspberry Pi B+, Pi A+, Pi 2 или Pi 3 и представляет собой простое и недорогое решение для управления парой небольших коллекторных двигателей постоянного тока. Его встроенный драйвер двойного двигателя DRV8835 позволяет ему работать от 1,5 В до 11 В, что делает его отличным вариантом управления для низковольтных двигателей. Плата может подавать непрерывный ток 1,2 А (пиковое значение 1,5 А) на двигатель или 2,4 А (пиковое значение 3 А) на один двигатель, если оба канала подключены параллельно.
Эта крошечная плата представляет собой простой способ использования драйвера двух двигателей Toshiba TB6612FNG, который может независимо управлять двумя двунаправленными двигателями постоянного тока или одним биполярным шаговым двигателем. Рекомендуемое напряжение двигателя от 4,5 В до 13,5 В и пиковый выходной ток 3 А на канал (1 А в непрерывном режиме) делают этот драйвер отличным двигателем для маломощных двигателей.
Рекомендуемое напряжение двигателя от 4,5 В до 13,5 В и пиковый выходной ток 3 А на канал (1 А в непрерывном режиме) делают этот драйвер отличным двигателем для маломощных двигателей.
Эта компактная коммутационная плата упрощает использование драйвера двух двигателей Allegro A4990, который может управлять двумя двунаправленными двигателями постоянного тока в широком диапазоне рабочего напряжения от 6 В до 32 В. Он способен непрерывно подавать 0,7 А на каждый канал двигателя. , а встроенные сенсорные резисторы включают A49.90, чтобы ограничить пиковый ток двигателя примерно до 0,9 А на канал. Драйвер также имеет защиту от обратного напряжения, пониженного напряжения, перенапряжения, перегрузки по току и перегрева.
Этот небольшой экран представляет собой простой и экономичный способ управления двумя небольшими коллекторными двигателями постоянного тока с помощью платы Arduino или платы, совместимой с Arduino. Его встроенный драйвер двойного двигателя A4990 работает от 6 В до 32 В и может подавать постоянный ток 0,65 А на каждый канал двигателя, что делает его отличным вариантом управления для слаботочных двигателей, работающих от высокого напряжения. А4990 настроен на ограничение пикового тока двигателя примерно до 0,9 А на канал и защищен от обратного напряжения, пониженного напряжения, повышенного напряжения, короткого замыкания и перегрева.
А4990 настроен на ограничение пикового тока двигателя примерно до 0,9 А на канал и защищен от обратного напряжения, пониженного напряжения, повышенного напряжения, короткого замыкания и перегрева.
Эта крошечная коммутационная плата для драйвера двигателя DRV8838 от TI может подавать непрерывный ток 1,7 А (пиковое значение 1,8 А) на один коллекторный двигатель постоянного тока. Благодаря диапазону рабочего напряжения от 0 В до 11 В и встроенной защите от обратного напряжения, пониженного напряжения, перегрузки по току и перегрева этот драйвер является отличным решением для питания небольшого низковольтного двигателя. Несущая плата имеет форм-фактор 10-контактного DIP-корпуса, что упрощает ее использование со стандартными макетными платами без пайки и 0,1-дюймовыми перфорированными платами.
Эта компактная коммутационная плата для драйвера двигателя ROHM BD65496MUV обеспечивает рабочий диапазон напряжения от 2 В до 16 В и может подавать непрерывный ток 1,2 А (пиковое значение 5 А в течение нескольких миллисекунд) на один коллекторный двигатель постоянного тока.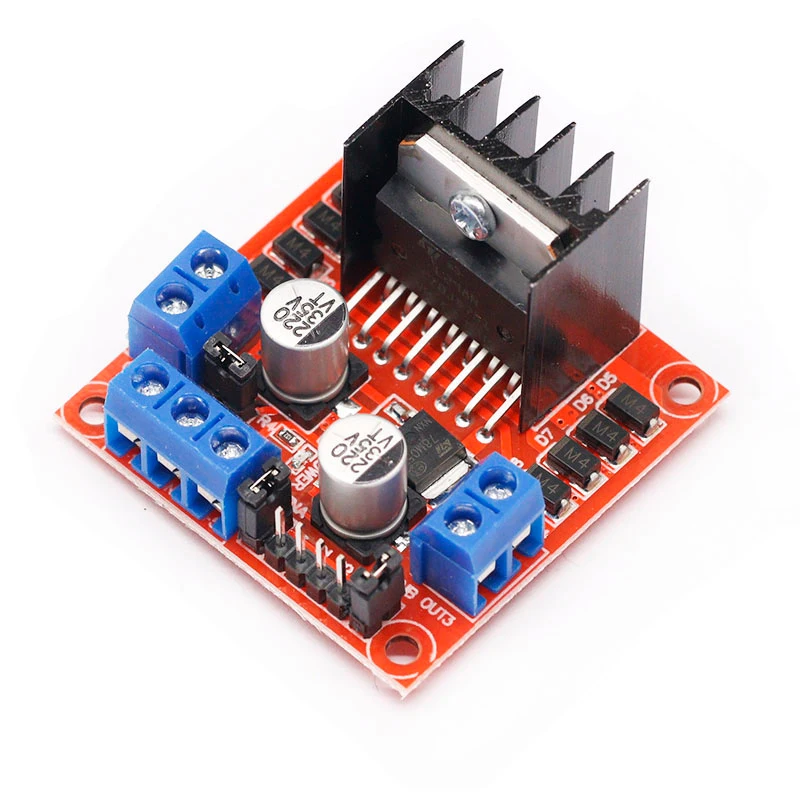 Драйвер двигателя имеет переменную скорость переключения, допускающую частоту ШИМ до 500 кГц, два варианта режима привода и встроенную защиту от пониженного напряжения и перегрева; наш оператор также добавляет защиту от обратного напряжения.
Драйвер двигателя имеет переменную скорость переключения, допускающую частоту ШИМ до 500 кГц, два варианта режима привода и встроенную защиту от пониженного напряжения и перегрева; наш оператор также добавляет защиту от обратного напряжения.
Эта крошечная коммутационная плата для DRV8801 от TI представляет собой современную альтернативу классическим драйверам двигателей, таким как L29.3D, SN754410 и L298N. Он может непрерывно подавать 1 А (2,8 А пик) на один двигатель и предлагает широкий диапазон рабочего напряжения от 8 В до 36 В. DRV8801 имеет простой двухконтактный интерфейс скорости/направления, обратную связь по току и встроенную — в защите от пониженного напряжения, перегрузки по току и перегрева.
Если вы хотите управлять двумя мощными двигателями в одном компактном блоке, эти двойные держатели драйверов двигателей VNh3SP30 идеально подходят для вас. С помощью этих плат легко запустить робота среднего размера с дифференциальным приводом в кратчайшие сроки.
Примечание: Драйверы двигателя VNh3SP30, используемые этой платой, больше не выпускаются ST. Мы настоятельно рекомендуем наш двойной носитель для более нового и лучшего VNH5019, который можно использовать в качестве альтернативы плате Arduino или отдельной плате.
Мы настоятельно рекомендуем наш двойной носитель для более нового и лучшего VNH5019, который можно использовать в качестве альтернативы плате Arduino или отдельной плате.
Если вы хотите управлять двумя мощными двигателями с помощью одного компактного устройства, эти двойные держатели драйверов двигателей VNh4SP30 идеально подходят для вас. С помощью этих плат легко запустить робота среднего размера с дифференциальным приводом в кратчайшие сроки.
Эта несущая плата для ИС драйвера двигателя ST VNh3SP30 работает от 5,5 до 16 В и может выдавать непрерывный ток 14 А (пиковое значение 30 А). Он работает с логическими уровнями 5 В, поддерживает ультразвуковую (до 20 кГц) ШИМ и имеет обратную связь по току. Наряду со встроенной защитой от обратного напряжения, перенапряжения, пониженного напряжения, перегрева и перегрузки по току эти функции делают этот продукт отличным драйвером двигателя общего назначения.
Примечание: Драйвер двигателя VNh3SP30, используемый этой платой, снят с производства ST.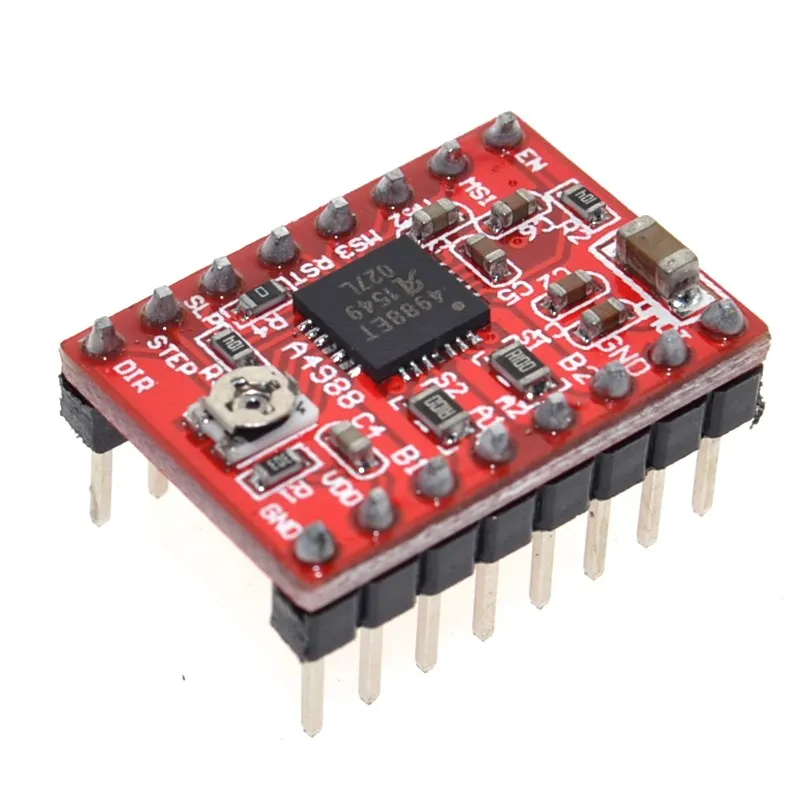 Мы настоятельно рекомендуем нашу несущую плату для нового и лучшего VNH5019.как альтернатива.
Мы настоятельно рекомендуем нашу несущую плату для нового и лучшего VNH5019.как альтернатива.
Эта несущая плата для ИС драйвера двигателя ST VNh4SP30 работает от 5,5 до 16 В и может обеспечить непрерывный ток 9 А (пиковое значение 30 А). Он предлагает встроенную защиту от обратного напряжения, перенапряжения, пониженного напряжения, перегрева и перегрузки по току и является отличным драйвером двигателя общего назначения.
Эта ИС драйвера двигателя от ST работает в диапазоне от 5,5 до 24 В и может обеспечить максимальный ток 30 А. Для получения дополнительной информации см. техническое описание VNH5019A-E (1 МБ pdf). Мы используем этот драйвер двигателя в нашем VNH5019.держатель драйвера двигателя и наш двойной экран драйвера двигателя VNH5019 для Arduino.
ВНх3СП30 — это усовершенствованная версия драйвера двигателя ВНх4СП30, отличающаяся измерением тока, расширенными возможностями привода и более высокой максимальной частотой ШИМ, равной 20 кГц.
Примечание: Этот драйвер больше не выпускается компанией ST.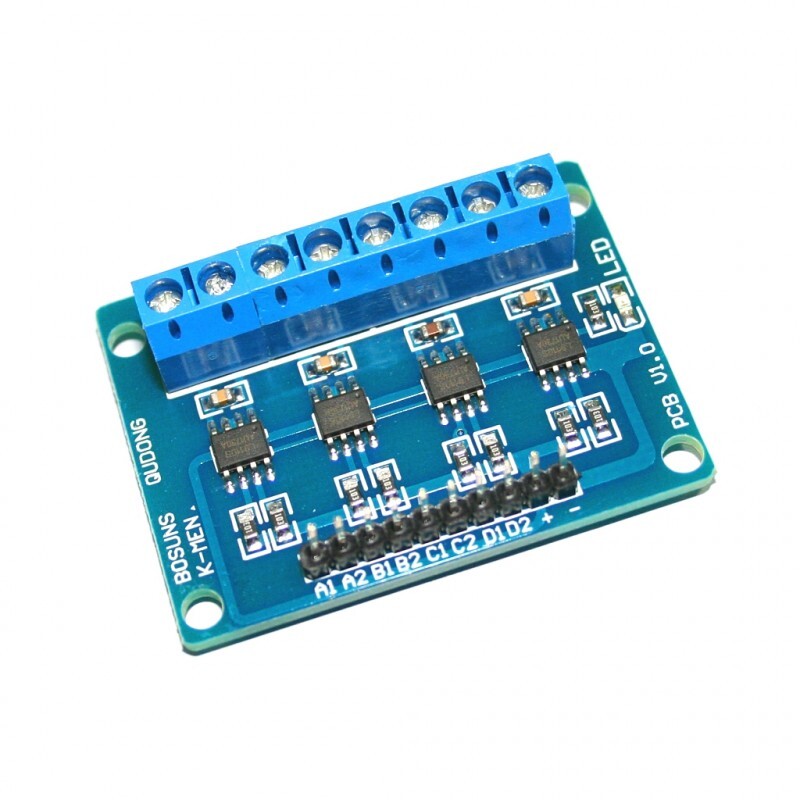 В качестве альтернативы мы рекомендуем более новый и очень похожий VNH5019.
В качестве альтернативы мы рекомендуем более новый и очень похожий VNH5019.
Микросхема VNh4SP30 представляет собой отличный Н-мостовой драйвер для двигателей, работающих от 6–16 В и потребляющих ток до 15 А. Микросхема способна выдерживать переходные процессы при 40 В, имеет пиковый ток 30 А и имеет различные Функции защиты от сбоев, такие как отключение при перегреве и перегрузке по току.
Pololu — VNH5019 Держатель привода мотора
Обзор
| Держатель привода мотора VNH5019, вид снизу с размерами. |
|---|
Этот модуль представляет собой компактную коммутационную плату для мощной ИС драйвера двигателя VNH5019 от ST, полностью интегрированного Н-моста, который можно использовать для двунаправленного управления скоростью одного коллекторного двигателя постоянного тока. Основные операции драйвера описаны ниже, но мы также рекомендуем внимательно прочитать VNH5019.техническое описание (1MB pdf) перед использованием этого продукта.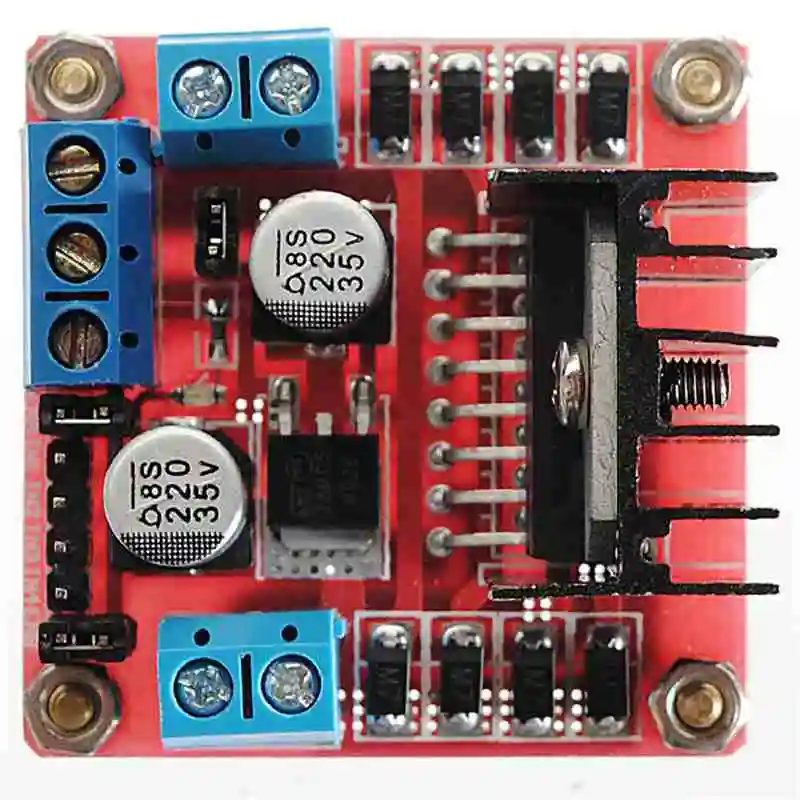 Плата включает в себя большинство компонентов типичной схемы приложений на странице 14 технического описания VNH5019, включая подтягивающие и токоограничивающие резисторы, а также полевой транзистор для защиты батареи от переполюсовки. Он поставляется полностью укомплектованным компонентами SMD, включая VNH5019, как показано на изображении продукта.
Плата включает в себя большинство компонентов типичной схемы приложений на странице 14 технического описания VNH5019, включая подтягивающие и токоограничивающие резисторы, а также полевой транзистор для защиты батареи от переполюсовки. Он поставляется полностью укомплектованным компонентами SMD, включая VNH5019, как показано на изображении продукта.
Характеристики
- Рабочее напряжение: 5,5–24 В 1
- Выходной ток: 12 А, непрерывный (максимум 30)
- 3V-совместимые входы
- Режим ШИМ до 20 кГц, который является ультразвуковым и обеспечивает более тихую работу двигателя
- Выход датчика тока, пропорциональный току двигателя (прибл. 140 мВ/А; активен только при работе H-моста)
- Светодиодные индикаторы двигателя (указывают, что делают выходы, даже если двигатель не подключен)
- Надежный:
- Защита от обратного напряжения до -16 В
- Выдерживает входное напряжение до 41 В
- Отключение при пониженном и повышенном напряжении
- Термическое отключение по стороне высокого и низкого давления
- Защита от короткого замыкания на землю и короткого замыкания на Vcc
1 Хотя защита от перенапряжения обычно срабатывает при напряжении 27 В, она может срабатывать при напряжении до 24 В, поэтому мы не рекомендуем использовать этот драйвер двигателя с батареями на 24 В, которые значительно превышают 24 В при полной зарядке.
Использование драйвера двигателя
Разъемы двигателя и питания двигателя находятся на одной стороне платы, а разъемы управления — на другой стороне. Питание двигателя подключается к большим контактам VIN и GND; оно должно быть между 5,5 и 24 В и иметь возможность обеспечивать потенциально высокие токи, которые потребуются двигателю. Источник питания логики (обычно 2,5–5 В) подключается к небольшим контактным площадкам VDD и GND на стороне управления платы и используется для питания внутренних подтягивающих устройств на линиях включения ENA и ENB. Любое управляющее входное напряжение выше 2,1 В гарантированно будет высоким, поэтому этот драйвер можно напрямую подключать к системам с напряжением 3,3 и 5 В.
На следующей схеме показаны минимальные соединения, необходимые для взаимодействия этого драйвера двигателя с микроконтроллером:
| Минимальная схема подключения микроконтроллера к шасси драйвера двигателя VNH5019. |
|---|
В этой конфигурации направление двигателя определяется состоянием выводов INA и INB, а скорость двигателя регулируется рабочим циклом сигнала ШИМ, подаваемого на вывод ШИМ драйвера. Вывод PWM на плате находится в низком положении, поэтому выходы драйвера двигателя по умолчанию фактически отключены; контакты INA и INB являются плавающими (они не подтянуты к какому-либо определенному напряжению по умолчанию). См. таблицы истинности в VNH5019.Техническое описание A-E для получения дополнительной информации о том, как выводы INA, INB и PWM влияют на выходы драйвера, OUTA и OUTB. Обратите внимание, что также возможно сохранить линию ввода-вывода микроконтроллера, напрямую управляя выводами INA и INB с помощью ШИМ, удерживая вывод PWM на высоком уровне (например, подключив его напрямую к VDD), но компромисс заключается в том, что это работает только при низком уровне. частоты (несколько сотен герц или меньше).
Эта плата оснащена светодиодными индикаторами двигателя, которые можно использовать для проверки правильности работы выходов драйвера двигателя перед фактическим подключением двигателя (это может быть особенно полезно при обнаружении проблем, связанных с недостаточным питанием). Яркость светодиода увеличивается с увеличением скорости двигателя, а цвет светодиода меняется в зависимости от направления.
Яркость светодиода увеличивается с увеличением скорости двигателя, а цвет светодиода меняется в зависимости от направления.
Распиновка
| ПИН | Состояние по умолчанию | Описание |
|---|---|---|
| ВИН | Точка подключения положительной стороны источника питания двигателя 5,5–24 В. Поскольку защита от перенапряжения может достигать 24 В, мы не рекомендуем использовать аккумуляторы на 24 В для VIN. | |
| ВДД | Точка подключения положительной стороны источника питания логики (обычно 2,5–5 В). Единственной функцией этого вывода является питание внутренних подтягивающих устройств на двух линиях включения, ENA и ENB. | |
| ВУТ | Этот контакт дает вам доступ к источнику питания двигателя после защиты от обратного напряжения MOSFET (см. схему платы ниже). Его можно использовать для подачи питания с защитой от переполюсовки на другие компоненты системы, но его не следует использовать для больших токов. Этот вывод следует использовать только как выход. Этот вывод следует использовать только как выход. |
|
| Земля | Точки заземления для питания логики и двигателя. Источник управления и драйвер двигателя должны иметь общую землю. | |
| УТА | Выход полумоста А (подключается к одной клемме двигателя постоянного тока). | |
| ВНЕШНИЙ | Выход полумоста B (подключается к другому выводу двигателя постоянного тока). | |
| ШИМ | НИЗКИЙ | Вход широтно-импульсной модуляции: сигнал ШИМ на этом контакте соответствует выходу ШИМ на выходах двигателя. |
| ИНА | ПЛАВАЮЩАЯ | Вход направления вращения двигателя A (ввод по часовой стрелке). |
| ИНБ | ПОПЛАВКА | Вход направления вращения двигателя B (ввод «против часовой стрелки»). |
| КС | Выход датчика тока. Напряжение на выводе составляет примерно 140 мВ на ампер выходного тока, когда вывод CS_DIS имеет низкий уровень или отключен. Показания измерения тока более точны при более высоких токах. Вывод CS предназначен для частот ШИМ 5 кГц и выше. Если вы используете частоту ШИМ ниже 5 кГц и хотите измерить ток, мы рекомендуем добавить дополнительный конденсатор между контактом CS и GND, чтобы сгладить сигнал. Например, если вы используете частоту ШИМ 490 Гц и хотите измерить ток, вам следует добавить конденсатор емкостью 1 мкФ (или больше) между CS и GND. (Обратите внимание, что хотя напряжение CS потенциально может превышать 3,3 В при высоких токах, схема измерения тока должна быть безопасной для использования со многими аналоговыми входами 3,3 В. Большинство микроконтроллеров имеют встроенные защитные диоды, которые ограничивают входное напряжение до безопасного значения, и поскольку схема CS имеет резистор 10 кОм, включенный последовательно с выходом, через этот диод будет протекать не более нескольких сотен микроампер.) Показания измерения тока более точны при более высоких токах. Вывод CS предназначен для частот ШИМ 5 кГц и выше. Если вы используете частоту ШИМ ниже 5 кГц и хотите измерить ток, мы рекомендуем добавить дополнительный конденсатор между контактом CS и GND, чтобы сгладить сигнал. Например, если вы используете частоту ШИМ 490 Гц и хотите измерить ток, вам следует добавить конденсатор емкостью 1 мкФ (или больше) между CS и GND. (Обратите внимание, что хотя напряжение CS потенциально может превышать 3,3 В при высоких токах, схема измерения тока должна быть безопасной для использования со многими аналоговыми входами 3,3 В. Большинство микроконтроллеров имеют встроенные защитные диоды, которые ограничивают входное напряжение до безопасного значения, и поскольку схема CS имеет резистор 10 кОм, включенный последовательно с выходом, через этот диод будет протекать не более нескольких сотен микроампер.) |
|
| ЭНА/ДИАГА | ВЫСОКИЙ | Комбинация входа включения/вывода диагностики для полумоста A. Когда драйвер работает нормально, этот контакт действует как вход разрешения, с логическим высоким уровнем, разрешающим полумост A, и низким логическим уровнем, отключающим полумост A. Когда драйвер возникает ошибка, микросхема переводит этот вывод в низкий уровень, и полумост A отключается. Этот контакт подключен к VDD через подтягивающий резистор на плате. Когда драйвер работает нормально, этот контакт действует как вход разрешения, с логическим высоким уровнем, разрешающим полумост A, и низким логическим уровнем, отключающим полумост A. Когда драйвер возникает ошибка, микросхема переводит этот вывод в низкий уровень, и полумост A отключается. Этот контакт подключен к VDD через подтягивающий резистор на плате. |
| ENB/DIAGB | ВЫСОКИЙ | Комбинация включения входа/вывода диагностики для полумоста B. См. описание ENA/DIAGA. |
| CS_DIS | НИЗКИЙ | Отключает выход датчика тока CS при высоком уровне. Можно оставить отключенным в большинстве приложений. |
Аппаратные средства в комплекте
20-контактная 0,1-дюймовая прямая разъемная вилка и две 2-контактные клеммные колодки 5 мм входят в комплект поставки драйвера двигателя, как показано на рисунке ниже. Вы можете использовать клеммные колодки для подключения двигателя и питания двигателя, или вы можете отломить секцию 8 × 1 0,1-дюймовой контактной полосы и припаять ее к меньшим сквозным отверстиям, которые граничат с четырьмя большими контактными площадками двигателя и двигателя. . Однако обратите внимание, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате.
. Однако обратите внимание, что клеммные колодки рассчитаны только на 16 А, а каждая пара штыревых контактов рассчитана только на суммарный ток 6 А, поэтому для приложений с большей мощностью толстые провода следует припаивать непосредственно к плате.
| Держатель привода двигателя VNH5019 с включенным оборудованием. |
|---|
Припайка разъемов 0,1″ к логическим соединениям позволяет использовать специальные кабели или макетные платы без пайки, либо провода можно припаять непосредственно к плате для более компактной установки. Соединения двигателя и питания двигателя не должны выполняться через макетную плату.
Драйвер двигателя включает электролитический силовой конденсатор емкостью 47 мкФ, и есть место для добавления дополнительных конденсаторов (например, для компенсации длинных проводов питания или повышения стабильности источника питания). Дополнительные силовые конденсаторы обычно не требуются, и в этот драйвер двигателя дополнительные конденсаторы не входят.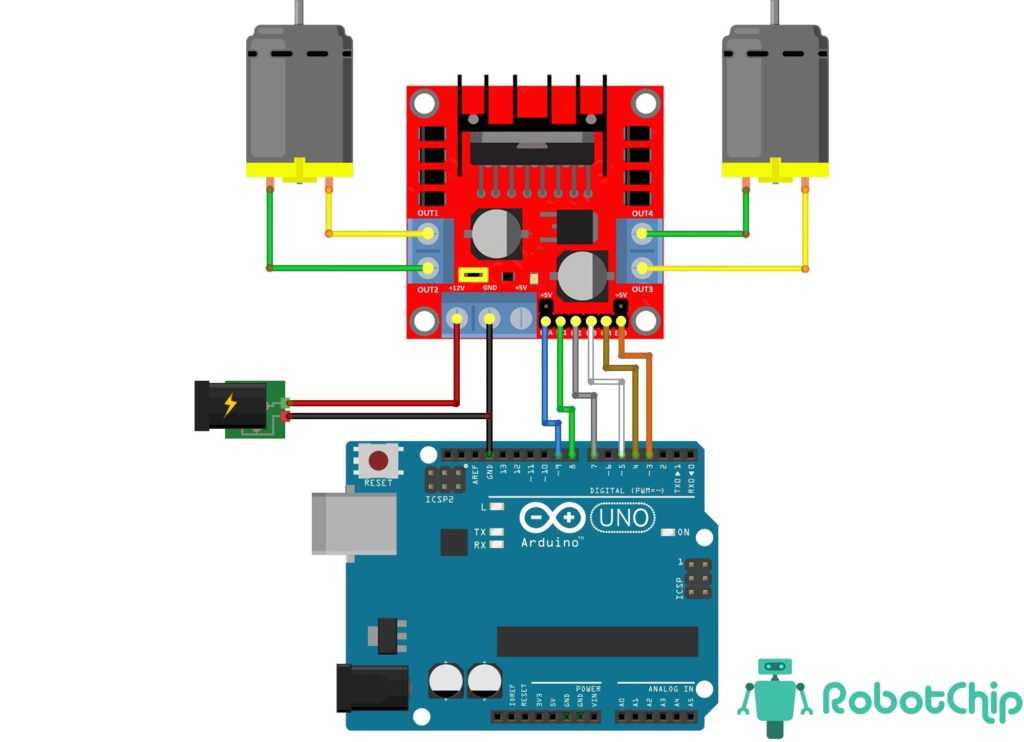
Два монтажных отверстия предназначены для использования с винтами № 2 (не входят в комплект).
Схематическая диаграмма
| Схематическая диаграмма шасси Pololu VNH5019. |
|---|
Эта схема также доступна для загрузки в формате pdf: VNH5019 несущей схемы (34k pdf)
на схеме выше), что приводит к выходному току (CS) приблизительно 210 мВ/А. Этот резистор теперь был изменен на 1k для лучшей совместимости с системами 3 В, обеспечивая выход CS примерно 140 мВ/А.
Сравнение ВНх4СП30, ВНх3СП30 и ВНХ5019
| Тепловизионное изображение нижней части держателя привода двигателя VNH5019 во время одного из наших текущих испытаний. |
|---|
В дополнение к этому держателю VNH5019 мы предлагаем несущие платы для двух аналогичных более старых драйверов двигателей от ST: VNh4SP30 и VNh3SP30. VNH5019является единственным из трех с практическим рабочим напряжением выше 16 В, и только он работает с логикой 3 В.
Текущие значения в приведенной ниже таблице (т. е. записи, к которым применяется сноска 3) являются результатами тестирования только одной или двух версий драйверов каждой версии, поэтому они не учитывают возможные различия между устройствами. Таким образом, значения следует рассматривать как грубые оценки производительности, а не как гарантии производительности. Хотя эти тесты, кажется, показывают, что VNh3SP30 работает немного холоднее и, следовательно, может обеспечивать более длительный ток, чем VNH5019., важно отметить, что три версии драйвера были протестированы в разное время в потенциально разных условиях, поэтому результаты не обязательно являются точными показателями относительной производительности.
В наших тестах мы заметили, что тепловая защита на VNH5019 срабатывала при более низкой температуре (153°C), чем на VNh3SP30 (170°C), что может частично объяснить более короткое время перегрева VNH5019. Однако мы также заметили, что температура VNH5019 несколько выше, чем у VNh3SP30 при использовании в тех же условиях: VNH5019достигла температуры 85°С через 3 минуты при 10 А, в то время как ВНх3СП30 достигла температуры 80°С.
В следующей таблице представлено сравнение трех драйверов:
| ВНх4СП30 | ВНх3СП30 | ВНХ5019 | |
|---|---|---|---|
| Рабочее напряжение: (1) | 5,5–16 В (2) | 5,5 – 16 В | 5,5 – 24 В |
| MOSFET Сопротивление во включенном состоянии (на ногу): | 34 мОм тип. | 19 мОм макс. | 18 мОм тип. |
| Максимальная частота ШИМ | 10 кГц | 20 кГц | 20 кГц |
| Чувствительность тока | нет данных | 0,13 В/А тип. | 0,14 В/А тип. |
| Отключение при перенапряжении | 36 В мин. (2) / 43 В тип. | 16 В мин. / 19 В тип. | 24 В мин. / 27 В тип. |
| Верхний порог логического входа | 3,25 В мин. | 3,25 В мин. | 2,1 В мин. |
| Время до перегрева при 20 А (3) | 8 с | 35 с | 20 с |
| Время до перегрева при 15 А (3) | 30 с | 150 с | 90 с |
| Ток для неограниченного времени работы (3) | 9А | 14 А | 12 А |
1 VNh4SP30 выдерживает входное напряжение до 40 В, а VNh3SP30 и VNH5019 — до 41 В, но отключение при перенапряжении срабатывает при более низком напряжении.
2 Хотя защита от перенапряжения в ВНх4СП30 не срабатывает до 36 В, по нашему опыту, сквозные токи делают работу ШИМ непрактичной при напряжении выше 16 В.
3 Типичные результаты использования плат-носителей драйверов двигателей Pololu со 100% рабочим циклом при комнатной температуре (без принудительного воздушного потока или отвода тепла за пределы несущей печатной платы).
Датчик тока
Выход датчика тока составляет приблизительно 140 мВ/А. Обратите внимание, что выход активен только во время работы Н-моста; он неактивен (низкий уровень), когда привод движется по инерции (выходные сигналы двигателя имеют высокий импеданс) или тормозит. Во время выбега цикла движения/выбега ток будет продолжать циркулировать через двигатель, но напряжение на выводе FB не будет точно отражать ток двигателя.
Учет рассеиваемой мощности в реальных условиях
Максимальный номинальный ток непрерывного тока ИС драйвера двигателя составляет 30 А. Однако микросхемы сами по себе будут перегреваться при более низких токах (типичные значения см. в таблице выше). Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхем драйвера двигателя, но производительность можно улучшить, добавив радиатор. В наших тестах мы смогли обеспечить короткие промежутки времени (порядка миллисекунд) 30 А и несколько секунд 20 А без перегрева. При токе 6 А чип становится едва заметно теплым на ощупь. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Однако микросхемы сами по себе будут перегреваться при более низких токах (типичные значения см. в таблице выше). Фактический ток, который вы можете подать, будет зависеть от того, насколько хорошо вы сможете охлаждать драйвер двигателя. Печатная плата носителя предназначена для отвода тепла от микросхем драйвера двигателя, но производительность можно улучшить, добавив радиатор. В наших тестах мы смогли обеспечить короткие промежутки времени (порядка миллисекунд) 30 А и несколько секунд 20 А без перегрева. При токе 6 А чип становится едва заметно теплым на ощупь. Для сильноточных установок провода двигателя и питания также следует припаивать напрямую, а не через прилагаемые клеммные колодки, которые рассчитаны на ток до 16 А.
Этот продукт может нагреть до такой степени, что обожжет вас задолго до того, как чип перегреется. Будьте осторожны при обращении с этим продуктом и другими компонентами, связанными с ним.
Многие контроллеры двигателей или регуляторы скорости могут иметь номинальный пиковый ток, значительно превышающий номинальный постоянный ток; это не относится к этим драйверам двигателей, которые имеют непрерывный номинальный ток 30 А и защиту от перегрузки по току, которая может срабатывать при 30 А (обычно 50 А).