Какие существуют основные типы электродвигателей. Как устроены двигатели постоянного и переменного тока. В чем заключается принцип работы различных видов электромоторов. Каковы преимущества и недостатки разных типов электродвигателей.
Основные типы электродвигателей
Электродвигатели можно разделить на две основные категории:
- Двигатели постоянного тока (DC)
- Двигатели переменного тока (AC)
Внутри этих категорий существует множество разновидностей электродвигателей, различающихся по конструкции и принципу действия.
Двигатели постоянного тока
Двигатели постоянного тока (DC) работают от источника постоянного напряжения. Их основные преимущества:
- Легкость регулировки скорости вращения в широком диапазоне
- Высокий крутящий момент при низких оборотах
- Компактные размеры при высокой мощности
Недостатки DC двигателей:
- Наличие щеточно-коллекторного узла, подверженного износу
- Искрение щеток, создающее помехи
- Более высокая стоимость по сравнению с AC двигателями
Основные типы DC двигателей:
- С постоянными магнитами
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С независимым возбуждением
- Универсальные коллекторные
Двигатели переменного тока
Двигатели переменного тока (AC) работают от источника переменного напряжения. Их основные преимущества:

- Простота конструкции и надежность
- Низкая стоимость
- Отсутствие коллектора
- Возможность работы напрямую от сети переменного тока
Недостатки AC двигателей:
- Сложность регулировки скорости вращения
- Меньший пусковой момент (для асинхронных)
Основные типы AC двигателей:
- Асинхронные (индукционные)
- Синхронные
- Шаговые
Асинхронные двигатели
Асинхронные двигатели — самый распространенный тип электродвигателей. В них ротор вращается асинхронно, то есть с отставанием от магнитного поля статора.
Устройство асинхронного двигателя:
- Статор с обмотками, создающими вращающееся магнитное поле
- Ротор с короткозамкнутой обмоткой типа «беличье колесо»
- Подшипниковые щиты
- Вал
- Корпус
Принцип работы асинхронного двигателя:
- В обмотках статора создается вращающееся магнитное поле
- Магнитное поле индуцирует ток в обмотке ротора
- Взаимодействие магнитных полей статора и ротора создает вращающий момент
- Ротор начинает вращаться, но с небольшим отставанием от поля статора
Синхронные двигатели
В синхронных двигателях ротор вращается синхронно с магнитным полем статора. Они имеют следующие особенности:

- Высокий КПД
- Возможность работы с высоким коэффициентом мощности
- Постоянная скорость вращения независимо от нагрузки
- Сложность запуска (требуется дополнительная система пуска)
Устройство синхронного двигателя:
- Статор с трехфазной обмоткой
- Ротор с обмоткой возбуждения или постоянными магнитами
- Контактные кольца для подачи постоянного тока в обмотку ротора
- Вал и подшипники
Принцип работы синхронного двигателя:
- Трехфазный ток в обмотках статора создает вращающееся магнитное поле
- Постоянный ток подается в обмотку ротора, создавая второе магнитное поле
- Взаимодействие полей статора и ротора создает вращающий момент
- Ротор вращается синхронно с полем статора
Шаговые двигатели
Шаговые двигатели отличаются дискретным характером вращения. Их ротор поворачивается на фиксированный угол (шаг) при подаче управляющего импульса. Основные особенности:
- Высокая точность позиционирования
- Возможность работы без датчика положения
- Фиксация ротора в заданном положении
- Невысокая скорость вращения
Устройство шагового двигателя:
- Статор с несколькими обмотками
- Ротор с постоянными магнитами или зубчатой конструкцией
- Вал и подшипники
Принцип работы шагового двигателя:
- На обмотки статора подаются импульсы тока в определенной последовательности
- Магнитное поле статора взаимодействует с полем ротора
- Ротор поворачивается на один шаг
- Процесс повторяется для следующего шага
Сравнение различных типов электродвигателей
Каждый тип электродвигателя имеет свои преимущества и недостатки, определяющие области их применения:
- DC двигатели: высокая динамика, широкий диапазон регулировки скорости, подходят для транспорта и промышленных приводов
- Асинхронные AC двигатели: простота, надежность, низкая стоимость, широко используются в промышленности и бытовой технике
- Синхронные AC двигатели: высокий КПД, постоянная скорость, применяются в мощных промышленных установках
- Шаговые двигатели: точное позиционирование, используются в станках с ЧПУ, роботах, принтерах
Современные тенденции в развитии электродвигателей
Основные направления совершенствования электродвигателей в настоящее время:
- Повышение энергоэффективности
- Применение новых магнитных материалов
- Интеграция электроники управления в конструкцию двигателя
- Разработка специализированных двигателей для конкретных применений
- Развитие технологий производства для снижения стоимости
Области применения различных типов электродвигателей
Выбор типа электродвигателя зависит от конкретного применения:
- Промышленные установки: асинхронные и синхронные AC двигатели
- Транспорт: DC двигатели, синхронные двигатели с постоянными магнитами
- Бытовая техника: универсальные коллекторные, асинхронные двигатели
- Станки с ЧПУ: шаговые двигатели, серводвигатели
- Робототехника: DC двигатели, шаговые двигатели
Правильный выбор типа электродвигателя позволяет оптимизировать характеристики и стоимость оборудования для конкретной задачи.
Классификация электродвигателей
Электрический двигатель или электромеханический преобразователь – это машина вращательного типа, преобразующая электрическую энергию в механическую. Образование и выделение тепла – побочный эффект работы электродвигателя.
Вращающий момент в электродвигателе может создаваться при перемагничивании ротора вследствие гистерезиса, либо при взаимодействии магнитных полей статора и ротора, возникающих в них при подаче тока. Электродвигатели первой группы называют гистерезисными, применяют очень редко. Основная масса двигателей, используемых в промышленности, относится к группе магнитоэлектрических.
- Трехфазный асинхронный электродвигатель
- Линейные электродвигатели
- Электродвигатель постоянного тока
- Устройство шагового двигателя
- Устройство сервомотора
В зависимости от типа потребляемой энергии магнитоэлектрические двигатели подразделяются на двигатели постоянного и переменного тока. Существует также немногочисленная группа универсальных двигателей, которые питаются обоими видами тока.
Существует также немногочисленная группа универсальных двигателей, которые питаются обоими видами тока.
Двигатели постоянного тока
По наличию щёточно-коллекторного узла двигатели постоянного тока делят на коллекторные и бесколлекторные. Щёточно-коллекторный узел предусмотрен для электрического соединения цепей статора и ротора. Этот узел электродвигателя является наиболее уязвимым, сложным в ремонте и обслуживании.
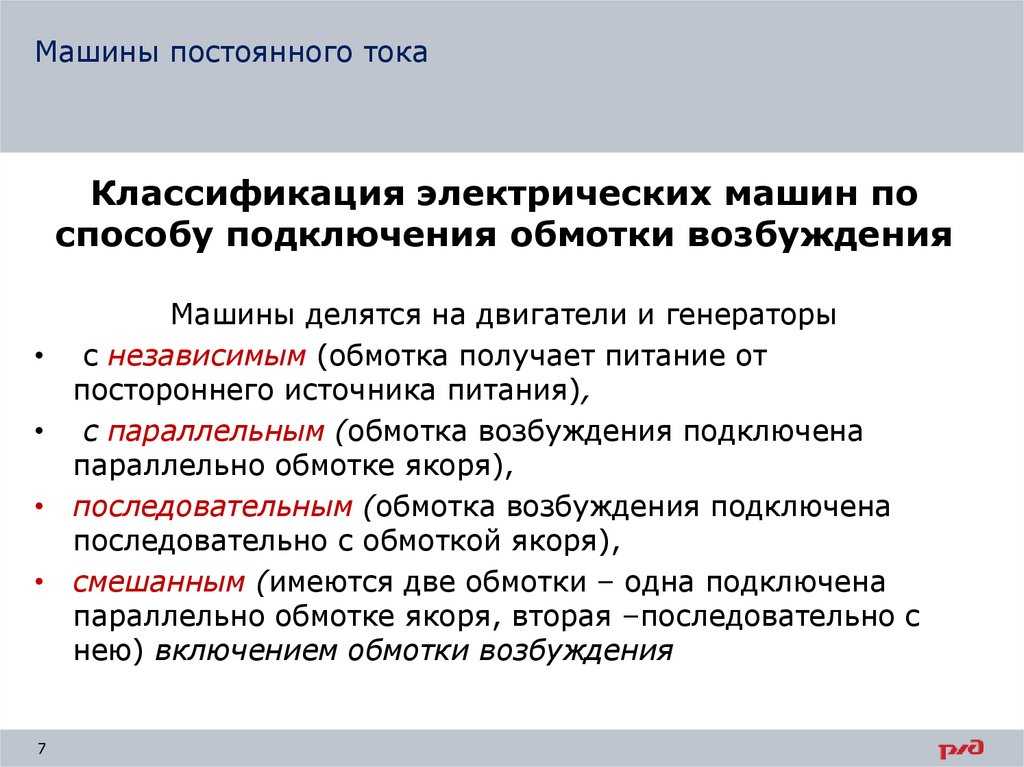
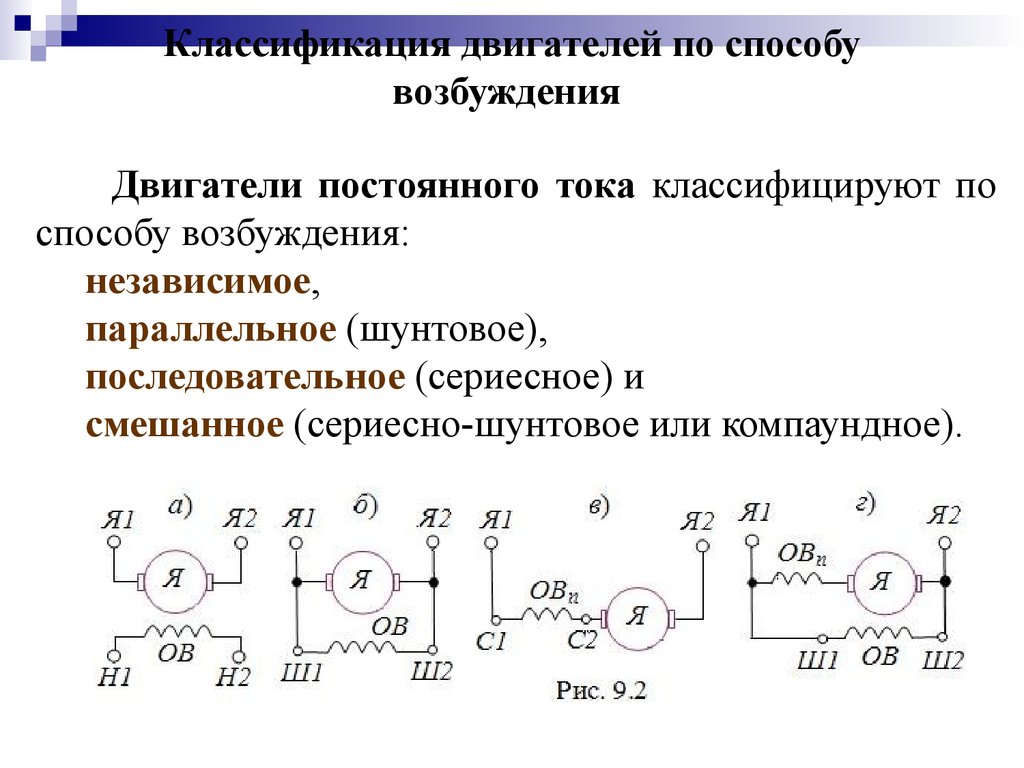
Внутри группы коллекторных двигателей существует деление на двигатели с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
В зависимости от особенностей взаимного подключения обмоток якоря и возбуждения внутри группы двигателей с самовозбуждением различают двигатели параллельного, последовательного и смешанного возбуждения.
Бесколлекторные или вентильные двигатели работают по тому же прицепу, что и синхронные двигатели постоянного тока. Представляют собой замкнутые системы, включающие силовой полупроводниковый преобразователь, преобразователь координат, датчик положения ротора.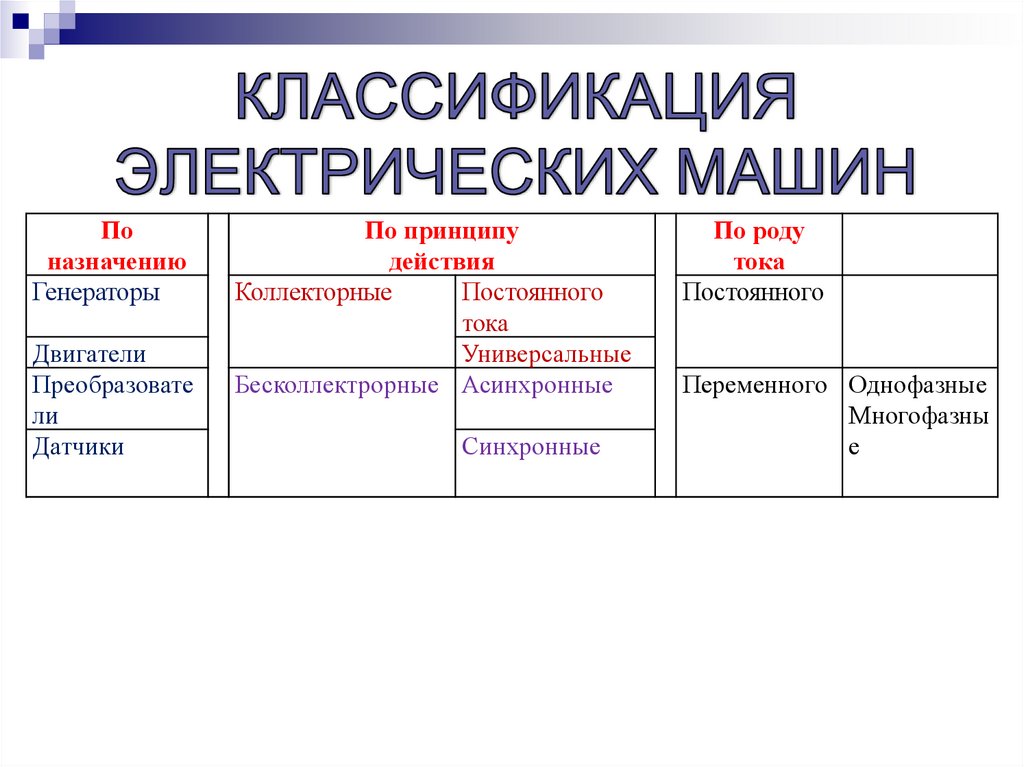
Электродвигатели переменного тока
Двигатели переменного тока питаются от сетей переменного тока и подразделяются на синхронные и асинхронные.
В синхронных электродвигателях скорости вращения ротора и движения первой гармоники магнитодвижущей силы статора совпадают. Этот тип двигателей применяется при высоких мощностях.
К группе синхронных двигателей относят вентильные реактивные и шаговые электродвигатели. Питание обмоток вентильных реактивных двигателей формируется с помощью полупроводниковых элементов. Отличительная особенность шаговых электродвигателей – дискретное (шаговое) угловое перемещение ротора при работе. Последовательное перемещение ротора происходит при переключении напряжения питания с одних обмоток на другие.
Наибольшее распространение в современной промышленности получили асинхронные электродвигатели. Частоты вращающего магнитного поля, создаваемого напряжением питания и вращения ротора в двигателях асинхронного типа всегда разнятся.
Двигатели переменного тока различаются по количеству фаз. По этому признаку выделяют одно-, двух-, трех- и многофазные двигатели. Однофазные двигатели могут иметь фазосдвигающую цепь, либо пусковую обмотку, либо запускаться вручную.
В электроинструментах и бытовых приборах применяются коллекторные универсальные электродвигатели, которые могут работать от источников постоянного и переменного тока. Универсальные двигатели производятся только с последовательными обмотками возбуждения, которые при подаче постоянного тока включаются полностью, а при подаче переменного – частично.
типы агрегатов, назначение асинхронного и синхронного оборудования
Электродвигатели представляют собой универсальные в использовании агрегаты, способные преобразовывать электричество в механическую энергию. Сегодня существуют различные типы и классификации электродвигателей, применяемых в бытовых и промышленных установках. Такая техника может различаться своим принципом работы, питанием от постоянного или переменного тока, мощностью и назначением.
- Принцип действия и особенности конструкции
- Сфера использования
- Классификация оборудования
- Магнитоэлектрические установки
- Синхронные электродвигатели
- Асинхронные модификации
Принцип действия и особенности конструкции
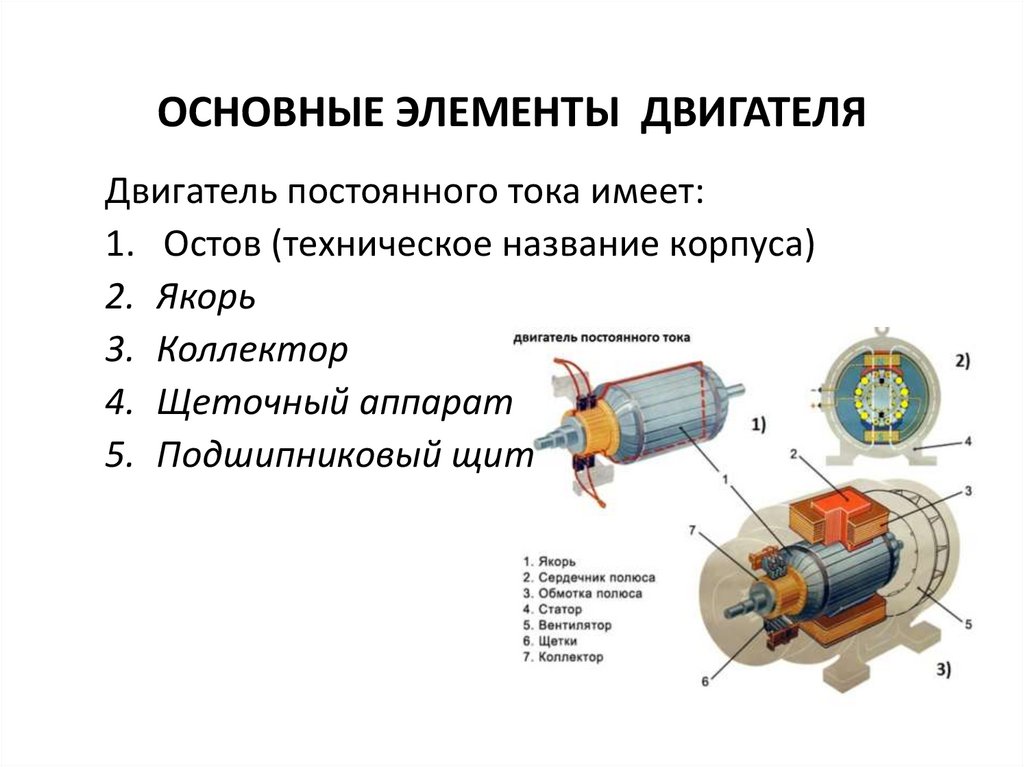
Устройство электродвигателя стандартно, что позволяет существенно упростить эксплуатацию и ремонт техники. Статор и ротор, которые являются основными элементами техники, находятся внутри проточки цилиндрической формы. При подаче напряжения на неподвижную обмотку статора возбуждается магнитное поле, что и приводит в движение ротор и вал электродвигателя.
Постоянное движение ротора поддерживается за счёт перекоммутации обмоток или путем создания в статоре вращающегося магнитного поля. Если первый способ поддержки вращения вала характерен для коллекторных модификаций агрегатов, то образование вращающегося магнитного поля присуще для трехфазных асинхронных моторов.
Корпус электрического двигателя может быть изготовлен из алюминиевого сплава или чугуна. В каждом конкретном случае выбор материала корпуса осуществляется исходя из сферы использования техники и ее необходимых параметров по весу.
В каждом конкретном случае выбор материала корпуса осуществляется исходя из сферы использования техники и ее необходимых параметров по весу.
Все двигатели изготавливаются с однотипными установочными размерами, что позволяет существенно упростить их монтаж и последующую эксплуатацию.
Сфера использования
Назначение электродвигателя чрезвычайно широко. Такие агрегаты используются для усиления мощности электросигналов, они способны преобразовывать постоянный ток в переменный, могут применяться в различных типах электромашин. Принято различать агрегаты, предназначенные для использования в промышленном оборудовании, машиностроении, на различных грузоподъёмных машинах и спецтехнике. Также большой популярностью пользуются маломощные электрические двигатели, которые с успехом применяются в различных бытовых инструментах и кухонной технике.
Классификация оборудования
На сегодняшний день существуют различные классификации электрических двигателей, которые отличаются по разным критериям и характеристикам. В зависимости от особенностей техники ее принято классифицировать:
В зависимости от особенностей техники ее принято классифицировать:
- По специфике вращающего момента различают магнитоэлектрические и гистерезисные агрегаты.
- По виду крепления принято выделять двигатели с горизонтальным и вертикальным расположением вала.
- По классу защиты от воздействия внешней среды различают защищенные, закрытые и взрывонепроницаемые.
В модификации гистерезисного типа вращение вала основывается на перемагничивании ротора. Такие двигатели были популярны в прошлом, однако сегодня их конструкция устарела, поэтому они практически не встречаются. Наибольшее распространение получили магнитоэлектрические агрегаты, способные работать от переменного или постоянного тока, а также модели универсального типа, которые одновременно питаются переменным и постоянным током.
Магнитоэлектрические установки
Использование магнитоэлектрических модификаций двигателей, работающих на постоянном токе, позволяет получить отличные динамические и эксплуатационные характеристики.
- с постоянными магнитами;
- с электромагнитами.
В последние годы наибольшей популярностью стали пользоваться модификации с электромагнитами, которые обладают большей мощностью, отличаются экономичностью в работе и позволяют быстро изменять параметры работы оборудования.
В коллекторных электродвигателях используется щеточный узел, обеспечивающий соединение вращающихся и неподвижных частей мотора. Такие агрегаты могут выполняться с независимым возбуждением и применением постоянных магнитов, но есть и такие, что имеют самовозбуждающийся тип со смешанным, последовательным или параллельным соединением. Коллекторные модификации отличаются посредственными показателями надежности. Они требуют грамотного и своевременного обслуживания.
Бесколлекторные вентильные агрегаты имеют замкнутую систему, которая работает по принципу синхронных устройств. Высококачественные бесколлекторные электродвигатели оснащаются датчиком считывания положения ротора, имеют преобразователь координат, на основании данных с которого и осуществляется работа устройства.
Высококачественные бесколлекторные электродвигатели оснащаются датчиком считывания положения ротора, имеют преобразователь координат, на основании данных с которого и осуществляется работа устройства.
Вентильные типы двигателей могут иметь различные размеры и мощность. Такие агрегаты используются в промышленном оборудовании. Также ими оснащаются аккумуляторные инструменты, различные игрушки и мобильные телефоны.
Синхронные электродвигатели
К синхронным электродвигателям переменного тока относятся модификации, у которых ротор вращается синхронно с генерируемым магнитным полем. Особенностью таких агрегатов является их высокая мощность, которая может достигать сотен киловатт. Основной сферой использования синхронного оборудования являются мощные промышленные установки, ветряные генераторы и гидроэлектростанции.
Принято различать несколько модификаций синхронных электродвигателей:
- шаговые;
- реактивные;
- с постоянными магнитами;
- реактивно гистерезисные;
- вентильные реактивные;
- с обмотками возбуждения;
- гибридные синхронные.

У шаговых синхронных двигателей с дискретным угловым движением вала положение ротора будет фиксироваться путём подачи напряжения на обмотки контура. Переход в другое положение вала осуществляется за счёт снятия питания с одних обмоток и последующей подачи напряжения на другие обмотки трансформатора.
Также широкое распространение получил вентильный реактивный электродвигатель, у которого обмотка выполнена из полупроводниковых элементов. Вентильные реактивные агрегаты отличаются увеличенной мощностью, при этом они могут полностью управляться электроникой, что позволяет как поддерживать минимальные обороты, так и быстро выходить на полную мощность с максимальной частотой оборотов. К преимуществам синхронных двигателей принято относить:
- стабильную скорость вращения;
- низкую чувствительность к перепадам напряжения в сети;
- возможность использования в качестве генератора мощности;
- минимальное потребление электроэнергии.

Однако и недостатки у синхронных устройств всё же имеются. К ним относятся сложности с запуском, трудности с обслуживанием, а также проблемы с регулировкой частоты вращения вала. Основное назначение таких устройств — это мощное промышленное оборудование, где ценится производительность агрегатов и их надежность.
Асинхронные модификации
У асинхронных двигателей переменного тока частота вращения ротора будет отличаться от показателей магнитного поля. Такие агрегаты называют также индукционными, что объясняется принципом генерации магнитного поля, которое возникает за счёт перемещения статора. Асинхронные модификации получили наибольшее распространение, что объясняется простотой их конструкции, надежностью, долговечностью, а также возможностью выполнения как сверхмощных промышленных установок, так и небольших электродвигателей, предназначенных для использования в бытовых инструментах.
В зависимости от типа электротока, с которым работают такие агрегаты, их принято разделять на три категории:
- однофазные;
- двухфазные;
- трехфазные.
Наибольшее распространение сегодня получили однофазные асинхронные двигатели, которые способны работать от бытовой электросети. Особенностью однофазных двигателей является наличие на статоре только одной рабочей обмотки и короткозамкнутого ротора. На обмотку статора подается переменный однофазный ток, приводящий во вращение ротор и вал двигателя. Сам ротор имеет цилиндрический сердечник с залитыми алюминием ячейками и открытыми вентиляционными лопастями. Однофазные двигатели с короткозамкнутым ротором используются в небольших по своей мощности устройствах, водяных насосах и комнатных вентиляторах.
Двухфазные асинхронные двигатели предназначены для использования в однофазной сети с переменным током. Их особенностью является наличие на статоре двух рабочих обмоток, расположенных перпендикулярно друг к другу. Во время работы агрегата на одну обмотку напрямую подаётся переменный ток, а на вторую — через соответствующий фазосдвигающий конденсатор. На выходе образуется крутящееся магнитное поле, которое упрощает запуск электромотора и в последующем поддерживает стабильно высокие обороты.
Во время работы агрегата на одну обмотку напрямую подаётся переменный ток, а на вторую — через соответствующий фазосдвигающий конденсатор. На выходе образуется крутящееся магнитное поле, которое упрощает запуск электромотора и в последующем поддерживает стабильно высокие обороты.
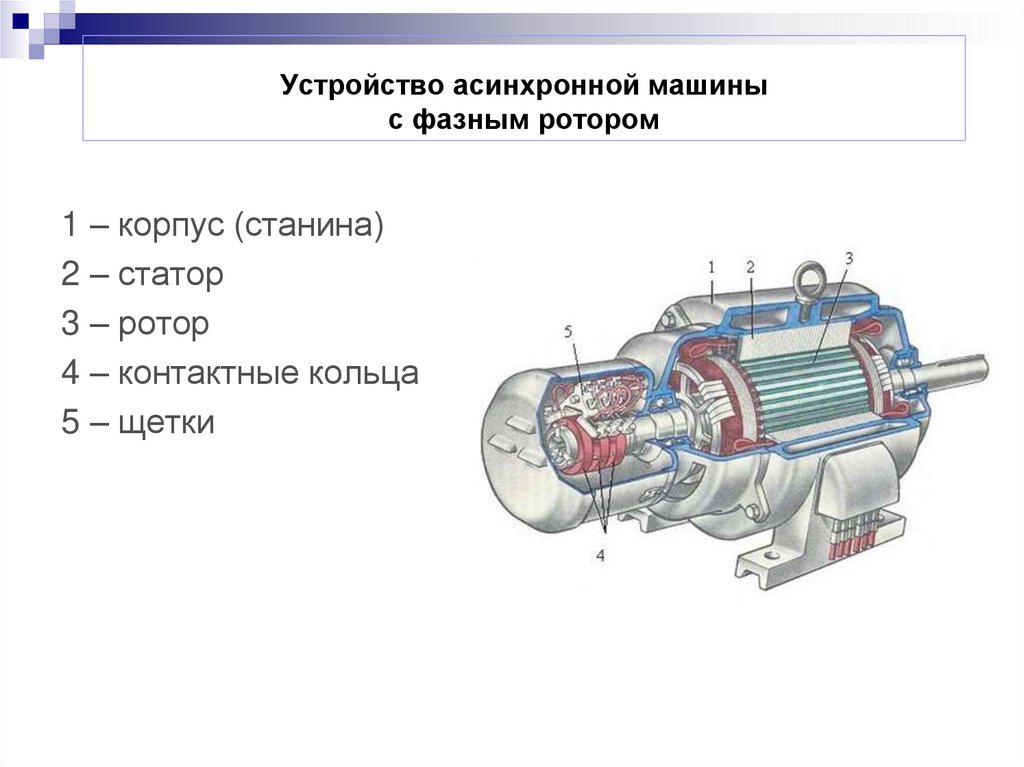
Трехфазные двигатели могут иметь короткозамкнутый и фазный ротор. Агрегаты оснащены тремя рабочими обмотками, расположенными на статоре параллельно друг другу. При включении двигателя в трехфазную сеть магнитное поле имеет сдвиг в пространстве относительно обмотки на 120 градусов. Наличие короткозамкнутого поля позволяет упростить запуск в работу устройства, при этом в последующем поддерживаются стабильные обороты. Модификации двигателей с фазным ротором отличаются увеличенной мощностью и используются преимущественно в промышленном оборудовании.
Преимуществами асинхронных электромоторов являются их устойчивость к скачкам напряжения и универсальность использования. Благодаря простоте конструкции существенно упрощается их последующее обслуживание, а сама техника чрезвычайно надежна и в процессе эксплуатации не доставляет каких-либо хлопот. В зависимости от своей модификации установки могут работать как от мощного источника электричества в трехфазной сети, так и от бытовой электросети, что позволяет применять их в различной бытовой технике и всевозможных электроприборах.
В зависимости от своей модификации установки могут работать как от мощного источника электричества в трехфазной сети, так и от бытовой электросети, что позволяет применять их в различной бытовой технике и всевозможных электроприборах.
Электродвигатели представляют собой простейшие и чрезвычайно надёжные устройства, которые широко используются в промышленности и быту. Существующие в настоящее время типы электродвигателей позволяют подобрать агрегат, который будет полностью соответствовать особенностям своей эксплуатации. С помощью таких моторов могут приводиться в движение мощные станки и оборудование, производительные насосы. Без их использования не обходится ни один бытовой электроприбор.
Классификация электродвигателей ~ Электрические ноу-хау
В предыдущей теме» Электрика
Основные компоненты двигателей « , я объяснил конструкцию и основные компоненты основных типов двигателей двигателей; Двигатели переменного и постоянного тока.
Сегодня я объясню различные типы электродвигателей в мире следующим образом.
Основные типы двигателей
Электродвигатели в целом подразделяются на две следующие категории:
- Двигатели переменного тока.
- Двигатели постоянного тока.
Внутри этих двух основных категорий есть подразделения, как показано на изображении ниже.
Типы двигателей
Примечания: В последнее время, с развитием экономичных и надежных силовых электронных компонентов, появилось множество способов проектирования двигателя, и классификации этих двигателей стали менее строгими, и появилось много других типов двигателей. Наша классификация двигателей будет максимально полной.
Первый: двигатели постоянного тока
| двигатели постоянного тока |
Системы питания постоянного тока не очень распространены в современной инженерной практике. Тем не менее, двигатели постоянного тока уже много лет используются в промышленности. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, подъемниками, экструдерами, судовыми установками, погрузочно-разгрузочными работами, бумагой, пластиком, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Тем не менее, двигатели постоянного тока уже много лет используются в промышленности. В сочетании с приводом постоянного тока двигатели постоянного тока обеспечивают очень точное управление. Двигатели постоянного тока могут использоваться с конвейерами, подъемниками, экструдерами, судовыми установками, погрузочно-разгрузочными работами, бумагой, пластиком, резиной, сталью, и текстильные приложения, автомобили, самолеты и портативная электроника, в приложениях управления скоростью.
Преимущества двигателей постоянного тока:
- Их скорость легко регулировать в широком диапазоне; исторически сложилось, что их характеристика крутящий момент-скорость настраивается легче, чем у всех категорий двигателей переменного тока. Вот почему большинство тяговых и серводвигателей были машинами постоянного тока. Например, двигатели для привода рельсовых транспортных средств до недавнего времени были исключительно машинами постоянного тока.
- Их уменьшенные габаритные размеры позволяют значительно сэкономить пространство, что позволяет производителям машин или установок не зависеть от преувеличенных размеров круглых двигателей.
Недостатки двигателей постоянного тока
- Так как им нужны щетки для соединения обмотки ротора. Происходит износ щеток, и он резко возрастает в условиях низкого давления. Поэтому их нельзя использовать в искусственных сердцах. При использовании в самолете щетки потребуют замены через один час работы.
- Искры от щеток могут привести к взрыву, если окружающая среда содержит взрывоопасные материалы.
- Радиочастотный шум от щеток может мешать расположенным поблизости телевизорам, электронным устройствам и т. д. Двигатели постоянного тока
- также дороже двигателей переменного тока.
Таким образом, во всех применениях двигателей постоянного тока используется механический переключатель или коммутатор для преобразования тока на клеммах, который является постоянным или постоянным, в переменный ток в якоре машины. Поэтому машины постоянного тока также называют коммутационными машинами.
Типы двигателей постоянного тока:
| Типы двигателей постоянного тока |
Двигатели постоянного тока делятся в основном на:
- Щеточные двигатели постоянного тока (BDC).
- Бесщеточные двигатели постоянного тока (BLDC).
1. A Щеточные двигатели постоянного тока
| Щеточные двигатели постоянного тока |
Коллекторный двигатель постоянного тока (BDC) представляет собой электродвигатель с внутренней коммутацией, предназначенный для работы от источника питания постоянного тока.
Области применения:
Коллекторные двигатели постоянного тока широко используются в самых разных областях: от игрушек до регулируемых с помощью кнопок автомобильных сидений.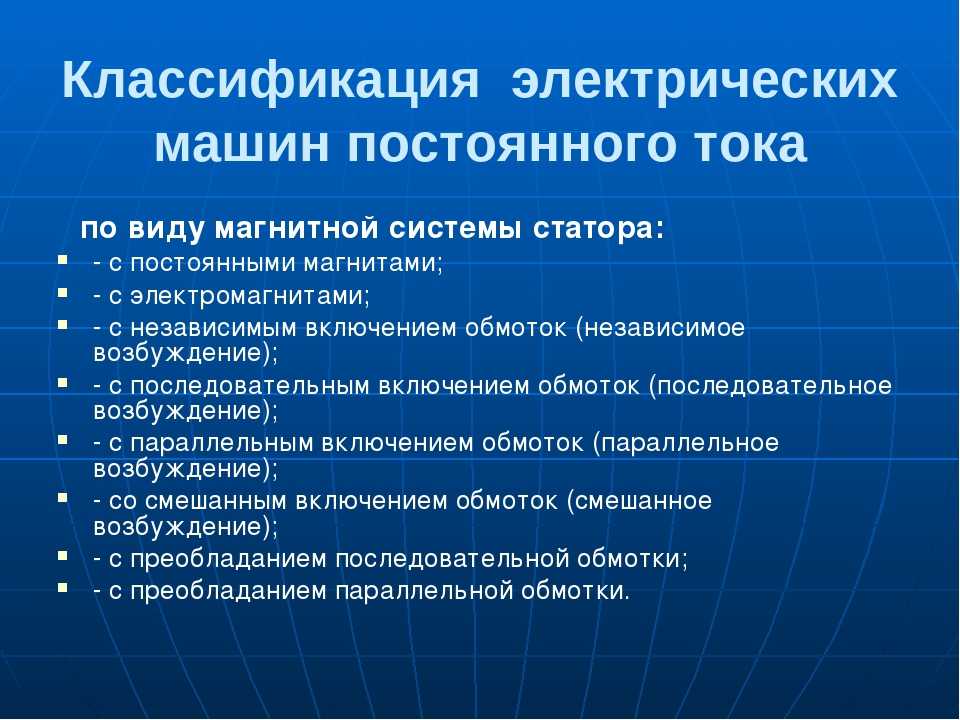
Advantages:
Brushed DC (BDC) motors are inexpensive, easy to drive, and are readily available in all sizes and shapes
Construction :
| Brushed Двигатель постоянного тока Конструкция |
Все двигатели BDC состоят из одних и тех же основных компонентов: статора, ротора, щеток и коллектора.
1- Статор
Статор создает стационарное магнитное поле, окружающее ротор. Это поле создается либо постоянными магнитами, либо электромагнитными обмотками.
2- Ротор
| Ротор (якорь) | 9005
 Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, генерируемым статором, заставляя ротор вращаться. Когда двигатель вращается, обмотки постоянно находятся под напряжением в разной последовательности, так что магнитные полюса, генерируемые ротором, не пересекают полюса, генерируемые в статоре. Это переключение поля в обмотках ротора называется коммутацией.
Магнитные полюса этого поля ротора будут притягиваться к противоположным полюсам, генерируемым статором, заставляя ротор вращаться. Когда двигатель вращается, обмотки постоянно находятся под напряжением в разной последовательности, так что магнитные полюса, генерируемые ротором, не пересекают полюса, генерируемые в статоре. Это переключение поля в обмотках ротора называется коммутацией. 3- Brushes and Commutator
|
Сегменты и щетки
В отличие от других типов электродвигателей (т. е. бесщеточных двигателей постоянного тока, асинхронных двигателей переменного тока), для двигателей BDC не требуется контроллер для переключения тока в обмотках двигателя. Вместо этого коммутация обмоток двигателя BDC выполняется механически. Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
е. бесщеточных двигателей постоянного тока, асинхронных двигателей переменного тока), для двигателей BDC не требуется контроллер для переключения тока в обмотках двигателя. Вместо этого коммутация обмоток двигателя BDC выполняется механически. Сегментированная медная втулка, называемая коммутатором, находится на оси двигателя BDC. Когда двигатель вращается, угольные щетки (движущиеся сбоку от коммутатора для подачи напряжения питания на двигатель) скользят по коммутатору, соприкасаясь с различными сегментами коммутатора. Сегменты прикреплены к разным обмоткам ротора, поэтому внутри двигателя создается динамическое магнитное поле при подаче напряжения на щетки двигателя. Важно отметить, что щетки и коллектор являются частями двигателя BDC, которые наиболее подвержены износу, поскольку они скользят относительно друг друга.
Принцип работы коммутатора:
| Принцип работы коммутатора |
Когда ротор вращается, клеммы коммутатора также поворачиваются и постоянно меняют полярность тока, который он получает от неподвижных щеток, прикрепленных к батарее.
Типы двигателей BDC:
| Типы двигателей постоянного тока |
Различные типы двигателей BDC отличаются конструкцией статора или способом подключения электромагнитных обмоток к источнику питания. Эти типы:
- Постоянный магнит.
- Шунтовая рана. Серия
- -рана.
- Составная рана.
- Двигатель постоянного тока с независимым возбуждением.
- Универсальный двигатель.
- Серводвигатели.
A- Permanent Magnet
| Permanent Magnet Motor |
A permanent magnet DC (PMDC) motor is a motor whose полюса сделаны из постоянных магнитов для создания поля статора.
Преимущества:
- Поскольку внешняя цепь возбуждения не требуется, отсутствуют потери в меди цепи возбуждения.
- Поскольку обмотки возбуждения не требуются, эти двигатели могут быть значительно меньше.
- Широко используется в приложениях с низким энергопотреблением.
- Обмотка возбуждения заменена на постоянный магнит (простая конструкция и меньше места).
- Нет требований к внешнему возбуждению.
Недостатки:
- Поскольку постоянные магниты создают меньшую плотность магнитного потока, чем внешние шунтирующие поля, такие двигатели имеют меньший индуктивный крутящий момент.
- Всегда существует риск размагничивания из-за сильного нагрева или реакции якоря (некоторые двигатели с постоянным током имеют встроенную обмотку, чтобы предотвратить это).
B- Шунт-ваунд
| Shunt Wound Motor 9005 |
Shunt Wound Motor Dc (Shwdc). арматура.
арматура.
Скорость практически постоянна и не зависит от нагрузки, поэтому подходит для коммерческих применений с низкой начальной нагрузкой, таких как центробежные насосы, станки, воздуходувки, поршневые насосы и т. д.
Преимущества:
- Ток в катушке возбуждения и якоре не зависят друг от друга. в результате эти двигатели имеют отличный контроль скорости.
- Потеря магнетизма не является проблемой для двигателей SHWDC, поэтому они, как правило, более надежны, чем двигатели PMDC.
- Скоростью можно управлять либо путем включения сопротивления последовательно с якорем (уменьшение скорости), либо путем включения сопротивления в ток возбуждения (увеличение скорости).
Недостатки:
- Коллекторные двигатели постоянного тока с параллельной обмоткой (SHWDC) имеют недостатки при реверсивном применении, поскольку направление обмотки относительно параллельной обмотки должно быть изменено на противоположное при изменении напряжения якоря.
 Здесь необходимо использовать реверсивные контакторы.
Здесь необходимо использовать реверсивные контакторы.
Двигатель серии C
| Двигатель серии C |
Коллекторные двигатели постоянного тока с последовательной обмоткой (SWDC) имеют обмотку возбуждения, включенную последовательно с якорем. Эти двигатели идеально подходят для приложений с высоким крутящим моментом, таких как тяговые транспортные средства (краны и подъемники, электропоезда, конвейеры, лифты, электромобили), поскольку ток как в статоре, так и в якоре увеличивается под нагрузкой.
Преимущества:
- Крутящий момент пропорционален I2, поэтому он обеспечивает самое высокое отношение крутящего момента к току по сравнению со всеми другими двигателями постоянного тока.
Недостатки:
- Недостатком двигателей SWDC является то, что они не имеют точного контроля скорости, как двигатели PMDC и SHWDC.
- Скорость ограничена 5000 об/мин.
- Следует избегать запуска последовательного двигателя без нагрузки, поскольку двигатель будет неконтролируемо ускоряться.
D- Двигатель с комбинированной обмоткой
| Двигатель с комбинированной обмоткой |
Двигатели с комбинированной обмоткой (CWDC) представляют собой комбинацию двигателей с параллельной и последовательной обмоткой.
В двигателях CWDC используется как последовательное, так и шунтирующее поле. Производительность двигателя CWDC представляет собой комбинацию двигателей SWDC и SHWDC. Двигатели CWDC имеют более высокий крутящий момент, чем двигатели SHWDC, и обеспечивают лучшее управление скоростью, чем двигатели SWDC.
Используется в таких областях, как прокатные станы, внезапные временные нагрузки, тяжелые станки, штампы и т. д.
д.
Преимущества:
- Этот двигатель имеет хороший пусковой момент и стабильную скорость.
Недостатки:
- Скорость холостого хода регулируется, в отличие от серийных двигателей.
E- Отдельно возбужденные DC Motor
| Отдельно возбужденные DC Motor |
В разделенном DC Motor Motor. двигатель-генератор, и на ток возбуждения не влияют изменения тока якоря. Двигатель постоянного тока с независимым возбуждением иногда использовался в тяговых двигателях постоянного тока для облегчения контроля проскальзывания колес.
F- Universal Motor
| Universal Motor |
Мотор универсальный мотор или DO Or Orcom источник.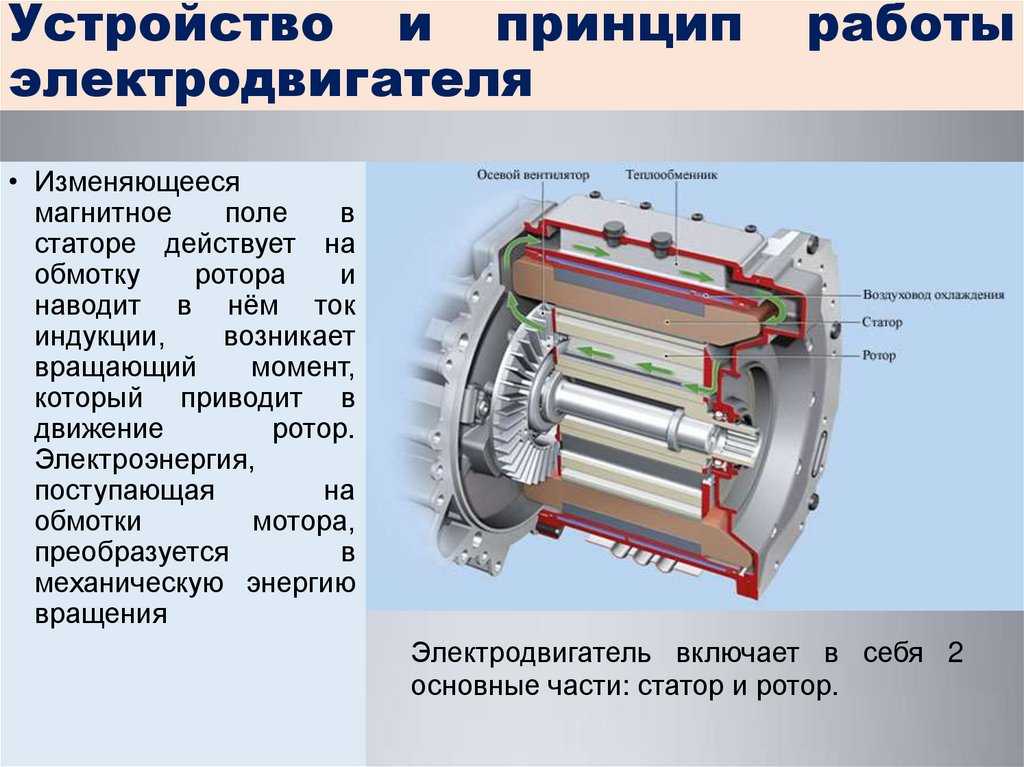 Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
Обмотки статора и ротора двигателя соединены последовательно через коммутатор ротора. Серийный двигатель предназначен для перемещения больших грузов с высоким крутящим моментом в таких приложениях, как двигатель крана или подъемный подъемник.
G- Servo Motors
| Servo Motors |
Servo Mortors- это Mehain Davices. в указанное положение. Серводвигатели предназначены для приложений, включающих управление положением, регулирование скорости и управление крутящим моментом.
|
Серводвигатель в основном состоит из двигателя постоянного тока, редуктора, датчика положения, который в основном представляет собой потенциометр, и управляющей электроники.
|
В следующей теме.0005 . Так что, пожалуйста, продолжайте следить.
Примечание: эти темы о двигателях в этом курсе EE-1: курс проектирования электрооборудования для начинающих предназначен только для начинающих, чтобы узнать общую базовую информацию о двигателях и насосах как типе силовых нагрузок. Но на других уровнях наших курсов по проектированию электрооборудования мы покажем и подробно объясним расчеты нагрузки двигателя и насоса.
Классификация электродвигателей по применению, технологии и NEMA
Связанные ресурсы: Motors
Классификация Электродвигатели в соответствии с применением, технологиями и NEMA
Электродвигатели, генераторы и приводы
. :
:
Электродвигатели переменного тока бывают трех основных типов: асинхронные, синхронные и с последовательным возбуждением.
определяется следующим образом.
Асинхронный двигатель NEMA :
Асинхронный двигатель — это асинхронная машина, в которой первичная обмотка на одном элементе (обычно
статор) подключается к источнику питания, а вторичная обмотка многофазная или короткозамкнутая
вторичная обмотка другого элемента (обычно ротора) несет наведенный ток.
Асинхронный двигатель с короткозамкнутым ротором NEMA :
Асинхронный двигатель с короткозамкнутым ротором представляет собой асинхронный двигатель, в котором вторичная цепь (беличья клетка
обмотка) состоит из ряда токопроводящих стержней, концы которых соединены металлическими кольцами или
пластины на каждом конце.
Асинхронный двигатель с фазным ротором NEMA :
Асинхронный двигатель с фазным ротором представляет собой асинхронный двигатель, в котором вторичная цепь состоит из
многофазная обмотка или катушки, выводы которых либо закорочены, либо замкнуты посредством соответствующих цепей.
Синхронный двигатель NEMA :
Синхронный двигатель представляет собой синхронную машину для использования в качестве двигателя.
NEMA Синхронный двигатель с возбуждением постоянным током :
Если не указано иное, обычно считается, что полюса возбуждения синхронного двигателя возбуждаются
постоянный ток.
NEMA Синхронный двигатель с постоянными магнитами :
Синхронный двигатель с постоянными магнитами представляет собой синхронный двигатель, в котором возбуждение возбуждения обеспечивается
с помощью постоянных магнитов.
NEMA Реактивный синхронный двигатель :
Реактивный синхронный двигатель представляет собой синхронный двигатель, аналогичный по конструкции асинхронному двигателю.
что элемент, несущий вторичную цепь, имеет циклическое изменение сопротивления, обеспечивающее эффект
явными полюсами, без постоянных магнитов или возбуждения постоянным током. Он запускается как асинхронный двигатель, т. обычно снабжен короткозамкнутой обмоткой, но работает нормально на синхронной скорости.
обычно снабжен короткозамкнутой обмоткой, но работает нормально на синхронной скорости.
Буквенные обозначения многофазных двигателей с короткозамкнутым ротором средних размеров
NEMA Design A :
Конструкция A Двигатель представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать пуск и развитие при полном напряжении.
крутящий момент заблокированного ротора при 60 Гц и 50
герц и имеющие проскальзывание при номинальной нагрузке менее 5 процентов.
NEMA Дизайн B :
Двигатель конструкции B представляет собой двигатель с короткозамкнутым ротором, рассчитанный на пуск при полном напряжении, развивающий блокировку ротора,
пробивной и тяговый крутящие моменты, достаточные для общего применения при 60 Гц и 50
герц и имеющие проскальзывание при номинальной нагрузке менее 5 процентов.
NEMA Дизайн C :
Двигатель конструкции C представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать запуск при полном напряжении, развивая заблокированный ротор. крутящий момент для специального применения с высоким крутящим моментом для 60 Гц и 12.35.2 для 50 Гц, и имеющий проскальзывание при номинальной нагрузке менее
5 процентов.
крутящий момент для специального применения с высоким крутящим моментом для 60 Гц и 12.35.2 для 50 Гц, и имеющий проскальзывание при номинальной нагрузке менее
5 процентов.
NEMA Дизайн D :
Двигатель конструкции D представляет собой двигатель с короткозамкнутым ротором, рассчитанный на то, чтобы выдерживать запуск при полном напряжении, развивая высокую
заблокированный крутящий момент ротора для 60
герц и 50 герц, и имеющих проскальзывание при номинальной нагрузке 5 процентов и более.
Однофазные двигатели NEMA
Конструкция NEMA N :
Двигатель конструкции N представляет собой однофазный небольшой двигатель, рассчитанный на пуск при полном напряжении и
ток заторможенного ротора.
NEMA Дизайн O :
Двигатель конструкции O представляет собой небольшой однофазный двигатель, рассчитанный на пуск при полном напряжении и
заблокированный ротор.
Однофазные двигатели средней мощности включают следующее:
Дизайн NEMA L :
Двигатель конструкции L представляет собой однофазный двигатель средней мощности, рассчитанный на пуск при полном напряжении и
развивать пробивной момент при токе заторможенного ротора.
Дизайн NEMA M :
Двигатель конструкции M представляет собой однофазный двигатель средней мощности, рассчитанный на пуск при полном напряжении и
развивать пробивной момент при токе заторможенного ротора.
Однофазные асинхронные двигатели с короткозамкнутым ротором классифицируются и определяются следующим образом:
Двухфазный двигатель NEMA :
Двухфазный двигатель представляет собой однофазный асинхронный двигатель, снабженный вспомогательной обмоткой, смещенной в
магнитное положение от основной обмотки и параллельно с ней.
Если не указано иное, предполагается, что вспомогательная цепь размыкается, когда двигатель достигает
заданная скорость. Термин «двигатель с расщепленной фазой», используемый без уточнения, описывает двигатель,
используется без импеданса, отличного от того, который предлагается самими обмотками двигателя, другие типы
отдельно определены.
Электродвигатель с пусковым сопротивлением NEMA :
Двигатель с резистивным пуском представляет собой двигатель с расщепленной фазой, в котором сопротивление подключено последовательно с
. вспомогательная обмотка. Вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.
вспомогательная обмотка. Вспомогательная цепь размыкается, когда двигатель достигает заданной скорости.
Конденсаторный двигатель NEMA :
Конденсаторный двигатель представляет собой однофазный асинхронный двигатель, основная обмотка которого расположена для непосредственного подключения к
источник питания и вспомогательная обмотка, соединенные последовательно с конденсатором. Есть три типа
конденсаторные двигатели следующим образом.
Конденсаторный пусковой двигатель NEMA :
Двигатель с конденсаторным пуском — это двигатель с конденсатором, в котором фаза конденсатора находится в цепи только во время
начальный период.
NEMA Двигатель с постоянным разделением конденсаторов :
Конденсаторный двигатель с постоянным разделением конденсаторов — это конденсаторный двигатель, имеющий одинаковое значение емкости для обоих
начальные и рабочие условия.
Двухзначный конденсаторный двигатель NEMA :
Двухзначный конденсаторный двигатель представляет собой конденсаторный двигатель, использующий различные значения эффективной емкости для пусковых и рабочих условий.
Электродвигатель с экранированными полюсами NEMA :
Двигатель с расщепленными полюсами представляет собой однофазный асинхронный двигатель, снабженный вспомогательной короткозамкнутой обмоткой.
или обмотки, смещенные в магнитном положении от основной обмотки.
Однофазные двигатели NEMA с фазным ротором :
Однофазные двигатели с фазным ротором определяются следующим образом:
Репульсный двигатель NEMA :
Отталкивающий двигатель – это однофазный двигатель,
мощности и обмотка ротора, подключенная к
и расположены так, что магнитная ось
обмотка. Этот тип двигателя имеет переменную скорость
Асинхронный двигатель NEMA с репульсным пуском :
Асинхронный двигатель с репульсным пуском представляет собой однотактный
но при заданной скорости обмотка ротора
аналог короткозамкнутой обмотки. Этот тип
асинхронный двигатель с постоянной скоростью вращения.
Репульсно-асинхронный двигатель NEMA :
Отталкивательно-асинхронный двигатель представляет собой форму отталкивания. дополнение к обмотке отталкивающего двигателя.
дополнение к обмотке отталкивающего двигателя.
Универсальные двигатели NEMA :
Универсальный двигатель — это двигатель с последовательным возбуждением, предназначенный для работы примерно с одинаковой скоростью и
выход на постоянный или однофазный переменный ток частотой не более 60 Гц
и примерно такое же среднеквадратичное напряжение.
Двигатель с последовательным возбуждением :
Двигатель с последовательным возбуждением представляет собой коллекторный двигатель, в котором цепь возбуждения и цепь якоря соединены между собой.
последовательно.
Компенсированный двигатель с последовательным возбуждением :
Компенсированный двигатель с последовательным возбуждением представляет собой двигатель с последовательным возбуждением и компенсирующей обмоткой возбуждения.
компенсационную обмотку возбуждения и последовательную обмотку возбуждения допускается объединять в одну обмотку возбуждения.
обмотка.
Генераторы переменного тока :
Генераторы переменного тока бывают двух основных типов: индукционные и синхронные, и определяются как
следующим образом:
Индукционный генератор :
Асинхронный генератор представляет собой асинхронную машину, приводимую в движение со скоростью выше синхронной от внешнего источника
механическая энергия для использования в качестве генератора.
Генератор с параллельным возбуждением :
Шунтовой генератор — это генератор постоянного тока, в котором цепь возбуждения включена либо в
параллельно цепи якоря или к отдельному источнику напряжения возбуждения.
Генератор с комбинированной обмоткой :
Генератор со сложной обмоткой — это генератор постоянного тока, который имеет две отдельные обмотки возбуждения — одну,
обычно преобладающее поле, подключенное как в генераторе с параллельной обмоткой, а другое, подключенное в
последовательно с якорной цепью.