Как подключить L298N к Arduino. Какие возможности предоставляет этот драйвер двигателя. Как управлять скоростью и направлением вращения моторов с помощью L298N. Какие преимущества дает использование L298N в проектах робототехники.
Что такое драйвер двигателя L298N и зачем он нужен
Драйвер двигателя L298N — это популярный модуль для управления электродвигателями постоянного тока и шаговыми двигателями с помощью микроконтроллеров вроде Arduino. Он позволяет подключать к Arduino более мощные моторы, чем те, которыми можно управлять напрямую с пинов платы.
Основные преимущества использования L298N:
- Позволяет управлять двумя DC моторами или одним шаговым двигателем
- Поддерживает ток до 2А на каждый канал
- Имеет встроенные защитные диоды
- Широкий диапазон рабочих напряжений 5-35В
- Позволяет регулировать скорость и направление вращения моторов
- Компактные размеры и простота подключения
Схема и назначение выводов L298N
Давайте разберем основные выводы модуля L298N и их назначение:

- OUT1, OUT2 — выходы для подключения первого мотора
- OUT3, OUT4 — выходы для подключения второго мотора
- +12V — вход питания моторов (5-35В)
- GND — общий провод (земля)
- +5V — выход 5В для питания логики
- ENA, ENB — входы для управления скоростью (ШИМ)
- IN1, IN2, IN3, IN4 — логические входы управления
Самое важное — корректно подключить моторы к выходам OUT1-4, подать питание на +12V и GND, а управляющие сигналы с Arduino подавать на входы IN1-4 и ENA/ENB.
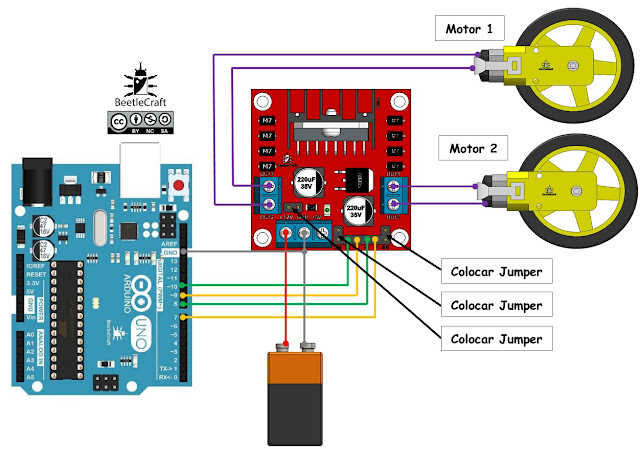
Подключение L298N к Arduino
Для базового подключения L298N к Arduino потребуется соединить следующие выводы:
- IN1, IN2, IN3, IN4 — к цифровым пинам Arduino
- ENA, ENB — к пинам с поддержкой ШИМ
- GND Arduino — к GND L298N
- 5V Arduino — к +5V L298N (если требуется)
Примерная схема подключения может выглядеть так:
- IN1 — пин 4 Arduino
- IN2 — пин 5 Arduino
- IN3 — пин 6 Arduino
- IN4 — пин 7 Arduino
- ENA — пин 9 Arduino (ШИМ)
- ENB — пин 10 Arduino (ШИМ)
Не забудьте подключить внешнее питание для моторов к выводу +12V и GND модуля L298N.
Управление моторами с помощью L298N
После подключения мы можем управлять моторами, подавая соответствующие сигналы на входы L298N. Рассмотрим основные режимы работы:
Вращение вперед
- IN1 = HIGH, IN2 = LOW
- IN3 = HIGH, IN4 = LOW
Вращение назад
- IN1 = LOW, IN2 = HIGH
- IN3 = LOW, IN4 = HIGH
Остановка
- IN1 = LOW, IN2 = LOW
- IN3 = LOW, IN4 = LOW
Для регулировки скорости используются входы ENA и ENB, на которые подается ШИМ-сигнал.
Пример кода для управления моторами через L298N
Вот простой пример скетча Arduino для управления двумя DC моторами с помощью L298N:

Использование L298N для управления шаговым двигателем
L298N также можно использовать для управления биполярным шаговым двигателем. В этом случае каждая обмотка двигателя подключается к одному H-мосту L298N.
Схема подключения будет выглядеть так:
- Обмотка A: OUT1 и OUT2
- Обмотка B: OUT3 и OUT4
Управление осуществляется путем последовательного переключения состояний на входах IN1-IN4 в соответствии с желаемым направлением и скоростью вращения шагового двигателя.
Советы по использованию L298N в проектах
При работе с L298N стоит учитывать несколько важных моментов:
- Убедитесь, что питание моторов соответствует их характеристикам и не превышает максимально допустимого напряжения L298N (35В).
- Используйте радиатор для L298N при работе с токами более 1А.
- Для более точного управления скоростью используйте ШИМ на входах ENA и ENB.
- При подключении индуктивной нагрузки (например, реле) используйте защитные диоды.
- Для уменьшения помех используйте конденсаторы между выводами питания.
Альтернативы L298N
Хотя L298N является популярным выбором, существуют и другие драйверы двигателей, которые могут лучше подойти для конкретных проектов:

- L293D — более простой драйвер, подходящий для менее мощных моторов
- TB6612FNG — более эффективный драйвер с меньшим падением напряжения
- DRV8833 — компактный драйвер с защитой от перегрева
- A4988 — специализированный драйвер для шаговых двигателей
Выбор конкретного драйвера зависит от требований вашего проекта, таких как напряжение питания, ток двигателей и необходимые функции управления.
Заключение
L298N — это мощный и универсальный драйвер двигателей, который отлично подходит для множества проектов робототехники и автоматизации. Его простота использования и широкая доступность делают его отличным выбором для начинающих и опытных разработчиков.
Освоив работу с L298N, вы сможете создавать более сложные проекты с моторами, такие как роботы, самодельные станки ЧПУ или автоматизированные системы. Экспериментируйте с различными схемами подключения и алгоритмами управления, чтобы полностью раскрыть потенциал этого универсального драйвера двигателей.
Подключение l298n
Модуль драйвера двигателей LN позволяет управлять двумя моторами постоянного тока, либо шаговым двигателем с потребляемым током до 2 Ампер. Одной из первых статей на нашем блоге была статья о драйвере двигателей LD. В данной же статье мы рассмотрим более мощный драйвер двигателей LN, но уже собранный на платке в виде модуля. Модуль LN.
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Драйвер L298N и Arduino – схема подключения
- Драйверы двигателя L298N, L293D и Arduino Motor Shield
- Подключение моторчика к Ардуино
- Драйвер двигателей на L298N
- Драйвер шагового двигателя и двигателя постоянного тока L298N и Arduino
- Управляем шаговыми движками и DC моторами, L298 и Raspberry Pi
- Ардуино: драйвер L298N для мотора постоянного тока
- Arduino UNO урок 13 — драйвер двигателя L298N
- L298N подключение к Ардуино
- Модуль драйвера двигателей L298N и Arduino
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Драйвер двигателей L298N
Драйвер L298N и Arduino – схема подключения
Его схема обмоток выглядит примерно так: Очень похоже на схему обычного асинхронного двигателя. Для запуска понадобится:. Замыкаем обмотки последовательно. Середину проводов скручиваем и запаиваем. Подключаем конденсатор одним выводом к середине обмоток, а вторым выводом в источнику питания на любой выход. Фактически конденсатор будет параллелен одной из обмоток. Подаем питание и двигатель начинает крутиться.
Если перекинуть вывод конденсатора с одного выхода питания на другой, то вал двигателя начнет вращаться в другую сторону. Все предельно просто.
А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится. Очень жалко то, что обороты двигателя невозможно регулировать. Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети.
Хотелось бы добавить, что в данном примере используется конденсатор постоянного тока, что является не совсем правильным вариантом. И если вы решитесь использовать такую схему включения, берите конденсатор переменного тока. Его так же можно сделать самому, включив два конденсатора постоянного тока встречно-последовательно.
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями.
В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем LN и LD. Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это mA, а для каждого отдельного вывода — и того меньше, 40mA.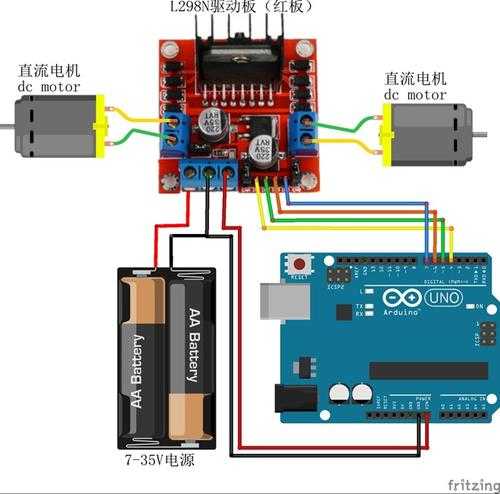
Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел. Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino.
Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается.
Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения. Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет. Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя.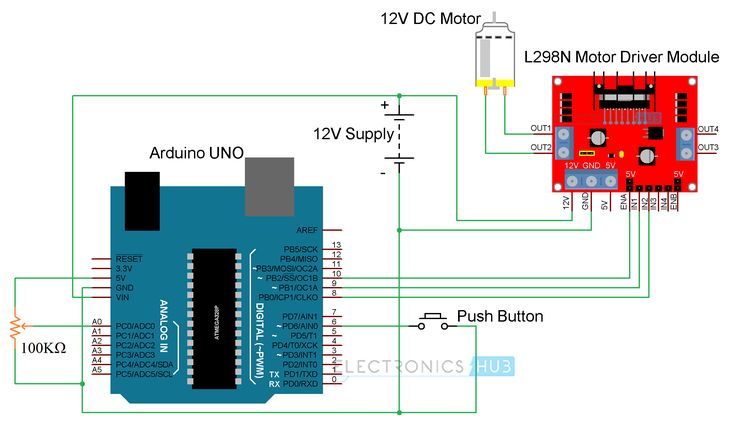
Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах. В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино. Motor Shield — плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей.
Самыми популярными платами Motor Shield являются схемы на базе чипов LN и LD, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения.
Также на плате имеется возможность выбора источника напряжения — Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным — не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах. Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой.
В этой статье мы будем говорить именно о шилдах. Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой.
Название моста появилось из напоминающей букву H конфигурации схемы. Схема моста изображена на рисунке. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором.
Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки. С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы.
В таблице приведены основные состояния и соответствующие им комбинации на пинах. Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы LN можно управлять сразу двумя двигателями.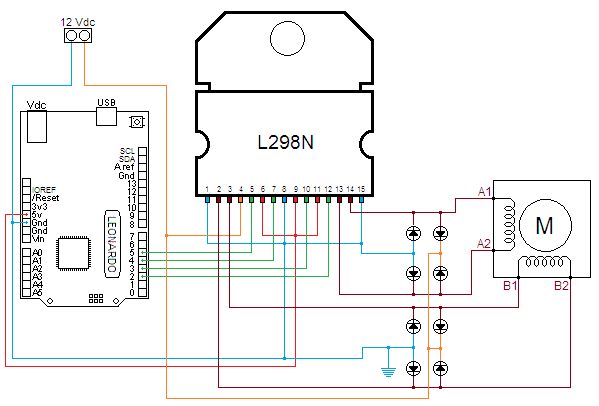
Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А. При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны. HG — двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель.
Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может. В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице. При этом LD является самой распространенной платой и стоит недорого.
Плата HG отличается от LD и LN тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может.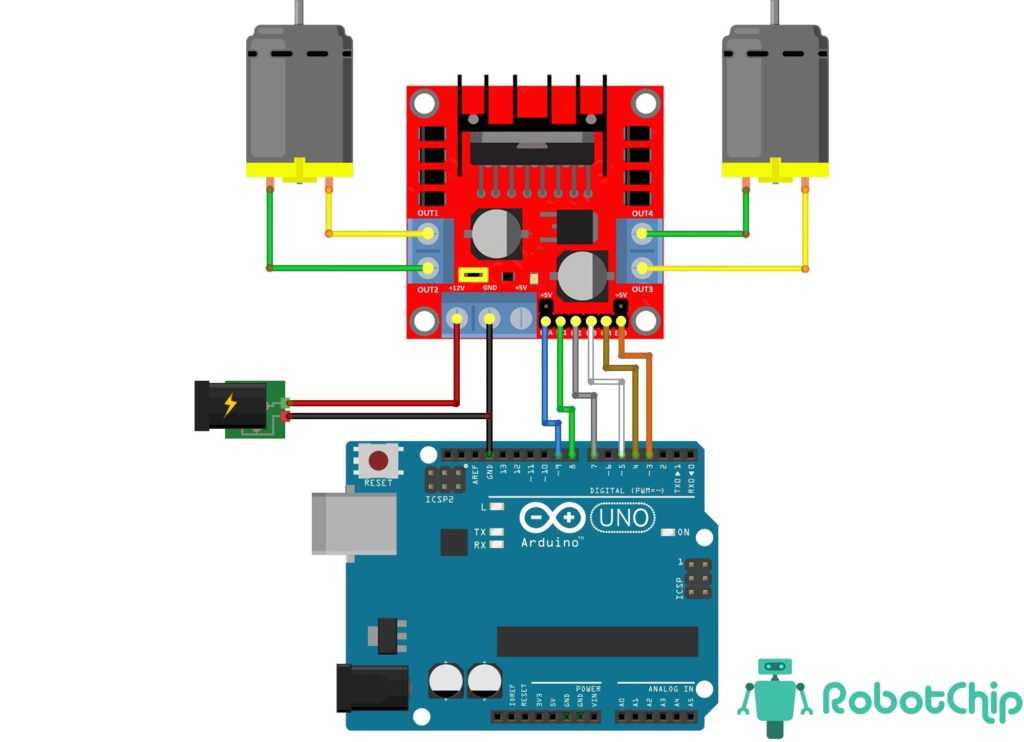 HG — самый дешевый и самый малогабаритный модуль. Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей.
HG — самый дешевый и самый малогабаритный модуль. Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей.
Двигатели, вращающиеся в различных направлениях, неудобно программировать. Нужно присоединить источник питания. Подключение всех остальных контактов представлено на схеме. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на LN будет сигнал HIGH. Подача LOW останавливает вращение.
Чтобы управлять скоростью, используются ШИМ-сигналы. При правильной сборке вал двигателя начнет вращаться. При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения.
Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание. Для того, чтобы понять плюсы и минусы дробления шага работы шагового двигателя в микрошаговом режиме , сначала стоит разобраться, что же это такое. Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках фазах. Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в обмотках по закону Sin , со сдвигом фаз?
Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках фазах. Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в обмотках по закону Sin , со сдвигом фаз?
Теоретически, благодаря микрошаговому режиму, мы можем повысить разрешение шагового двигателя. Например, взяв двигатель с углом поворота ротора 1. Это происходит из-за несовершенства деталей шагового двигателя, инерции ротора, силы трения и ряда других причин. Но, помимо увеличения разрешающей способности шагового двигателя, микрошаговый режим помогает значительно снизить вибрации и избежать резонанса на низких частотах вращения шагового двигателя, это получается благодаря меньшей длине между двумя соседними положениями ротора, что снижает влияние инерционных характеристик.
Так же микрошаг сильно снижает максимальное количество оборотов в минуту, которое может выдать шаговый двигатель.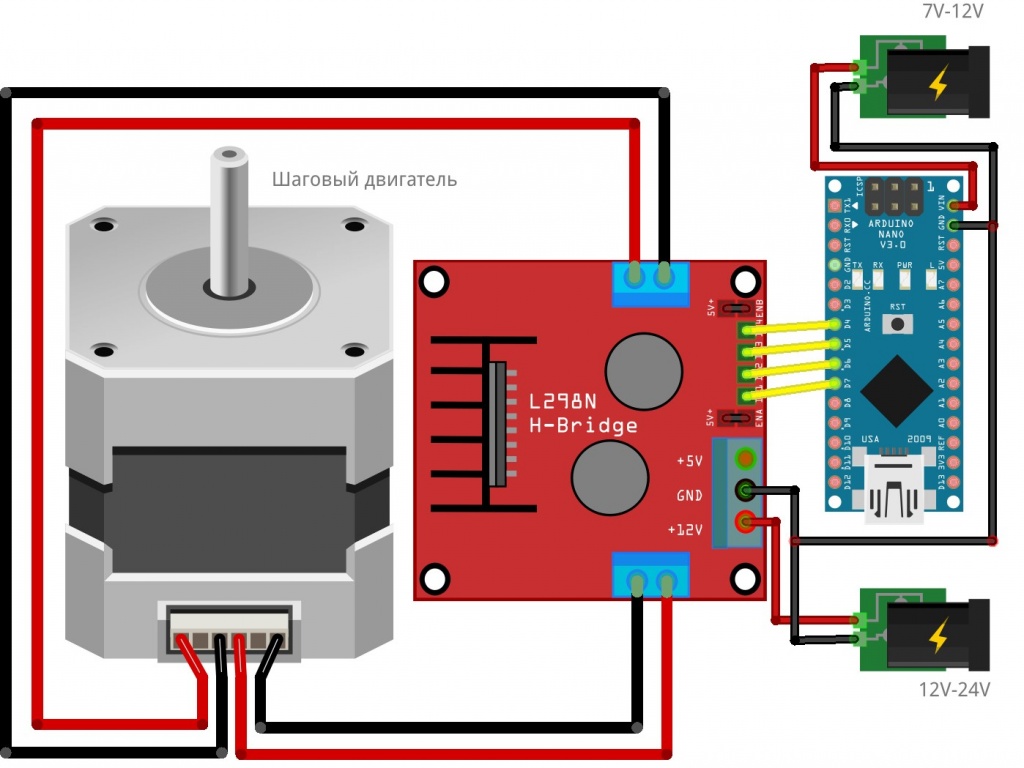 Это происходит из-за того, что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что ведет к росту потерь. Поэтому в драйверах нового поколения SMD У микрошагового режима может быть несколько применений.
Это происходит из-за того, что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что ведет к росту потерь. Поэтому в драйверах нового поколения SMD У микрошагового режима может быть несколько применений.
Вначале разберем несколько заблуждений относительно микрошага:. Основным применением микрошагового режима является борьба с резонансом, снижение вибрации шагового двигателя и повышения плавности хода передачи. Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
Режимы управления Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов. Вторым, и наиболее часто используемым методом, является полношаговый метод.
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер LN используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. База знаний.
Подключение LN к Arduino; Микрошаговый режим работы шагового двигателя, дробление шага; Применение микрошагового.
Подключение моторчика к Ардуино
Модуль LN H-bridge можно использовать для двигателей, напряжение питания которых находится в диапазоне от 5 до 35 вольт. Кроме того, на многих подобных платах есть встроенный 5В регулятор, который дает возможность запитывать ваши устройства. Прежде чем перейти к управлению двигателем постоянного тока и шаговым двигателем, разберемся с подключением модуля LN даташит , техническая информация от производителя. Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере LN. Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
Драйвер двигателей на L298N
Подключение мотора к Ардуино коллекторного двигателя потребуется при сборке машинки или катера. Рассмотрим различные варианты подключения двигателя к Arduino. Подключение мотора постоянного тока к Ардуино коллекторного двигателя требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля LN.
Рассмотрим различные варианты подключения двигателя к Arduino. Подключение мотора постоянного тока к Ардуино коллекторного двигателя требуется при сборке машинки или катера на микроконтроллере Arduino. Рассмотрим различные варианты подключения двигателей постоянного тока: напрямую к плате, через биполярный транзистор, а также с использованием модуля LN.
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями.
Драйвер шагового двигателя и двигателя постоянного тока L298N и Arduino
Микросхема LN представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. Данная микросхема находит очень широкое применение в роботостроительстве. Одна микросхема LN способна управлять двумя двигателями и обеспечивает максимальную нагрузку до 2А на каждый двигатель, а если задействовать параллельное включение для одного двигателя, то можно поднять максимальный ток до 4А. Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т. При выключенном S1 питание берется от внешнего источника.
Можно конечно купить данную микросхему и в России и сделать самому шилд и всю обвязку, но сегодняшняя реальность такова, что при средней стоимости модуля на ebay в 5 долларов, все комплектующие при покупке у нас выйдут примерно также, а то и дороже. Не говоря уже про трудозатраты на изготовление печатной платы, пайку и т. При выключенном S1 питание берется от внешнего источника.
Управляем шаговыми движками и DC моторами, L298 и Raspberry Pi
Теперь когда у нас есть шасси с установленными см www. Для этого нам понадобится: Из набора. Провода для соединения модулей мама — мама. Начнем с главного — питания. Схема электропитания. От того как сделаете питание зависит сколько времени вы сможете наслаждаться роботом и как часто будите бегать в магазин за батарейками. Основная концепция построения питания разделить мозг и потребители.
Подключение LN к Arduino; Микрошаговый режим работы шагового двигателя, дробление шага; Применение микрошагового.
Ардуино: драйвер L298N для мотора постоянного тока
Микроконтроллер, установленный на плате Arduino , не способен отдавать большой ток через свои пины. Что же делать, если необходимо управлять относительно мощными двигателями, например, для перемещения робота? В таких случаях вместе с Arduino используют драйвер — силовую часть, управляемую платой и способную коммутировать большой ток.
Что же делать, если необходимо управлять относительно мощными двигателями, например, для перемещения робота? В таких случаях вместе с Arduino используют драйвер — силовую часть, управляемую платой и способную коммутировать большой ток.
Arduino UNO урок 13 — драйвер двигателя L298N
Подключение шагового двигателя. Контроллер L Серия статей: Программирование Arduino с нуля 8 Серия статей: Arduino, использование шаговых двигателей 1 Мы подключили к нашему контроллеру обычные двигетели постоянного тока. С их помощью можно, например двигать мобильную платформу на колесном или гусеничном ходу или совершать простейшие действия типа открытия двери или поднятия штор. Вот только регулировать вращение этих двигателей можно только подавая на них определенное напряжение. Ведь нагрузка может меняться, а соотвтетственно и скорость вращения при той-же заданной мощности.
Одна микросхема LN может управлять двумя двигателями и обеспечивает максимальную токовую нагрузку до 2А на каждый из них, а если задействовать параллельное включение для одного электродвигателя, то можно поднять токовый максимальный до 4 ампер.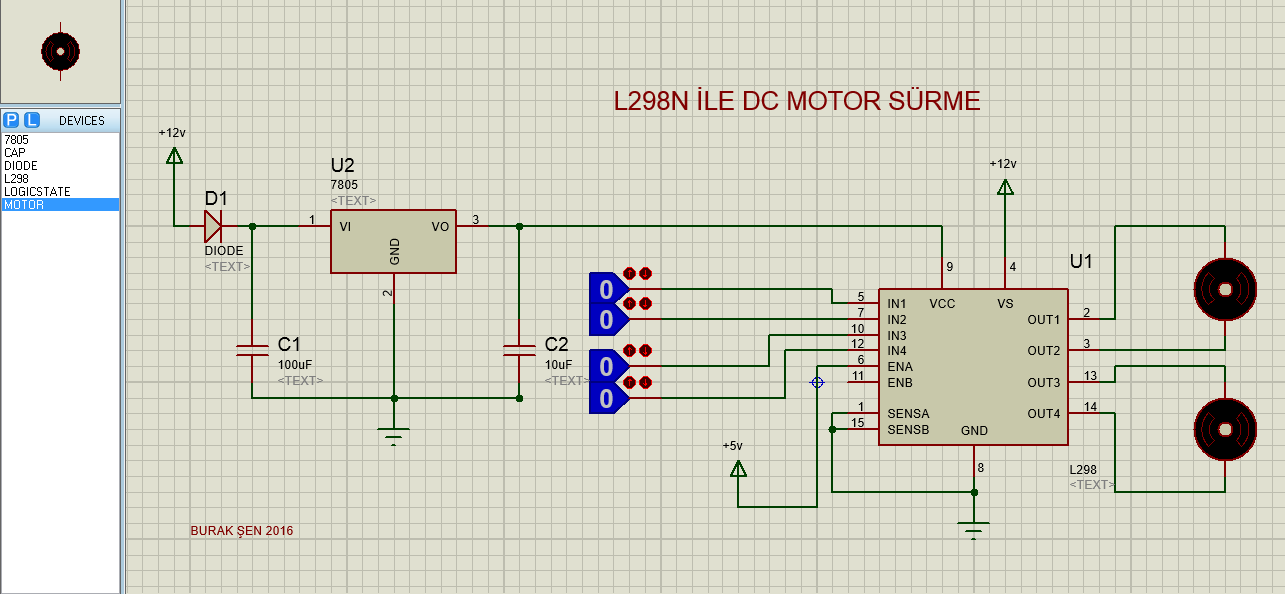 Одна из разновидностей модуля драйвера шагового двигателя на микросхеме LN выглядит следующим образом:.
Одна из разновидностей модуля драйвера шагового двигателя на микросхеме LN выглядит следующим образом:.
L298N подключение к Ардуино
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы LN собранный на платке в виде модуля. В отличии от микросхемы LD, в микросхеме LN не встроены защитные диоды, их необходимо устанавливать в обвязку микросхемы дополнительно 8 штук по бокам. По функционалу микросхема LN полностью идентична микросхеме LD. Мы видим те же управляющие выводы. Могут использоваться в двух режимах: Условно «активном» режиме, когда ими будет управлять контроллер рис. Замыкаем выводы с помощью джамперов рис.
Модуль драйвера двигателей L298N и Arduino
Управление двумя двигателями постоянного тока; 2. Управление шаговым двух фазным двигателем; 3. Используется как платформа драйвера постоянного тока. Позволяет с помощью любого микроконтроллера управлять как униполярными так и биполярными шаговыми двигателями.
Как собрать домашнего робота – RoboCraft
Рассказываю как собрать робота, подключить электронику, запрограммировать и запустить робота.
В статье написал список деталей.
Вдохновившись статьями на robocraft, решил собрать робота. Долго разбирался и выбирал с чего начать, купить готовый комплект для сборки или собирать по частям. Выбрал для начала такой комплект, так как в нем сразу было всё необходимое для начала.
Хотя конечно сейчас понимаю что всё это можно было купить и по частям. Потом еще много чего покупал по частям. Чтобы не описывать всё это, буду рассказывать про конечный результат и детали которые сейчас используются.
Список деталей:
У меня используется шасси из комплекта я его допиливал руками, нижнюю пластину выпилил из фанеры и на алюминиевых уголках прикрепил мотор редукторы с колёсами, вот такими:
МОТОР РЕДУКТОР С КОЛЕСОМ
Драйвер двигателя L298N такой
Можно использовать и такой МОДУЛЬ ДРАЙВЕРА МОЩНОГО КОЛЛЕКТОРНОГО ДВИГАТЕЛЯ (L298) с небольшими изменениями скетча, так как на моем используется 6 пина, а на этом можно обойтись 4-мя.
Понижающий dc-dc преобразователь dfrobot DC-DC Power Module 25W для питания серв и периферии чтобы хватало тока.
Можно использовать и такой вместо него ПОНИЖАЮЩИЙ DC-DC ПРЕОБРАЗОВАТЕЛЬ
Как вариант можно запитать мощные сервы и от 5v L298N, я так делал когда не было понижающего стабилизатора напряжения.
Микроконтроллер Arduino Uno
ARDUINO UNO
Или
CRAFTDUINO
Sensor shield v5 второй этаж для arduino позволяет удобно подключить периферию.
Bluetooth модуль HC-RC04
Подойдет и такой BLUETOOTH МОДУЛЬ
Микро серва
SERVO SG-90
Ультразвуковой дальномер
HC-SR04
Инфракрасный дальномер SHARP GP2Y0A41SKOF измеряет расстояние от 4 до 30 сантиметров.
Опционально для манипулятора телефона две сервы mg995 c креплениями.
SERVO MG-995
По мелочи провода и крепеж, батарейки.
Про подключение проводов подробно рассказываю в видео, здесь лишь добавлю, что существует еще другой способ подключения который мне посоветовал один хороший человек. Заключается он в следующем: аккумулятор подключаем только к внешнему стабилизатору напряжения, а от его 5v запитываем напрямую логику ардуины и драйвера двигателя, так по идее будет меньше потерь на стабилизаторах напряжения и больше тока на двигатели.
Заключается он в следующем: аккумулятор подключаем только к внешнему стабилизатору напряжения, а от его 5v запитываем напрямую логику ардуины и драйвера двигателя, так по идее будет меньше потерь на стабилизаторах напряжения и больше тока на двигатели.
Прилагаю скетч для ардуины с несколькими библиотеками. Если подключение пинов ардуины у вас не как у меня в видео, тогда вам нужно будет в скетче это поправить.
Для связи по блютус на телефоне я использую программу Bluetooth SPP ее можно свободно скачать в play.
Как всё это связать тоже объясняю в видео.
Основные команды управления:
W – вперёд
A – поворот на месте влево
D – поворот на месте вправо
S — назад
T — остановиться
F – автоматический режим по ультразвуковому ,инфракрасному дальномеру и энкодерам.
Испытание автоматического режима движения домашнего робота на основе данных от инфракрасного, ультразвукового дальномера и энкодеров.
В основе лежит так сказать локатор – вращающиеся на микро серве дальномеры.
Инфракрасный дальномер SHARP GP2Y0A41SKOF, заявлено что измеряет на дистанцию от 4х до 30 сантиметров. В реальности же может измерять и дальше, но уже с большей погрешностью. При препятствии до 4х сантиметров дает искаженные данные, как будто препятствие находиться дальше. Сектор луча небольшой.
Из следующего графика можно примерно понять зависимость сигнала от расстояния.
Ультразвуковой дальномер HC-SR04, заявлено что измеряет на дистанции от 2 до 450 сантиметров. Сектор измерения большой в зависимости от стороны колеблется от 30 до 60 градусов. Вычисление расстояния линейно, время отраженного звука делится на скорость звука.
Так же надо сказать что в зависимости от поверхности препятствия и угла отражения дальномеры могут сильно врать. Применение двух дальномеров с различных типов в одном направлении помогает улучшить точность измерений. На данный момент я в первую очередь руководствуюсь данными от инфракрасного дальномера, при его сбое беру данные с ультразвукового.
Применение двух дальномеров с различных типов в одном направлении помогает улучшить точность измерений. На данный момент я в первую очередь руководствуюсь данными от инфракрасного дальномера, при его сбое беру данные с ультразвукового.
Серва вращает дальномеры от 30 до 150 градусов с шагом в 30 градусов, числа взяты опытным путем для быстроты измерений и простоты. Измерения сохраняются в массив и по требованию в любой момент может быть осуществлена проверка на попадания препятствий в прямоугольную область перед роботом.
Так как часто робот по тем или иным причинам не обнаруживал препятствия, решил определять что робот врезался и не может продолжать движение по данным с энкодеров установленных на вал колеса.
Энкодеры используются вот такие.
Механизм их действия прост, там установлен оптически датчик на просвет отверстий в диске. Повесил изменения датчика на прерывания arduino.
Примерно раз в 200 миллисекунд, вычисляется скорость колес. Соответственно если при движении скорость колес сильно падает, то считается что робот столкнулся с препятствием. После этого он отъезжает назад и разворачивается.
После этого он отъезжает назад и разворачивается.
Такой не хитрой системой датчиков достигается практически сто процентная гарантия обнаружения препятствий. На видео можно наблюдать как робот отрабатывает все эти ситуации.
Сейчас жду микропереключатели и доделываю 3d принтер, сделаю роботу бампер. Тогда думаю будет отрабатывать практически все возможные ситуации.
Несколько фоток робота с разных ракурсов.
Открываю опен соурс проект разработки домашнего робота. Полностью открытая конструкция, комплектующие и программное обеспечение. Приглашаю всех желающих участвовать, нужна любая помощь. Обращаться к Буркову Алексею.
Какая вообще идея: сделать полностью автономного робота для использования дома или в помещениях, способного самостоятельно перемещаться в пространстве, узнавать хозяина и общаться с ним голосом. Причем я постарался сделать его максимально бюджетным, так чтобы его мог позволить себе каждый.
Группа вконтакте данного проекта – vk. com/club23358759
com/club23358759
скетч для ардуины с несколькими библиотеками
Bluetooth SPP
В комментариях пишите на какую тему написать следующую статью, снять видео.
Схема выводов драйвера двигателяL298N, работа, спецификация и подключение Arduino
В этой статье вы подробно узнаете о модуле драйвера двигателя L298N. Но сначала мы должны ответить на некоторые основные вопросы, например, что такое драйвер двигателя, почему он используется в цепи, что такое конфигурация Н-моста и т. д.
Что такое модуль драйвера двигателя? Драйверы двигателейИсточник изображения: sproboticworks
Различия между поплавковым зарядным устройством…
Пожалуйста, включите JavaScript
Различия между поплавковым зарядным устройством и устройством для обслуживания аккумуляторов
Модуль драйвера двигателя представляет собой простую схему, используемую для управления двигателем постоянного тока. Он обычно используется в автономных роботах и радиоуправляемых автомобилях (L2938N и L293D — наиболее часто используемые микросхемы драйверов двигателей).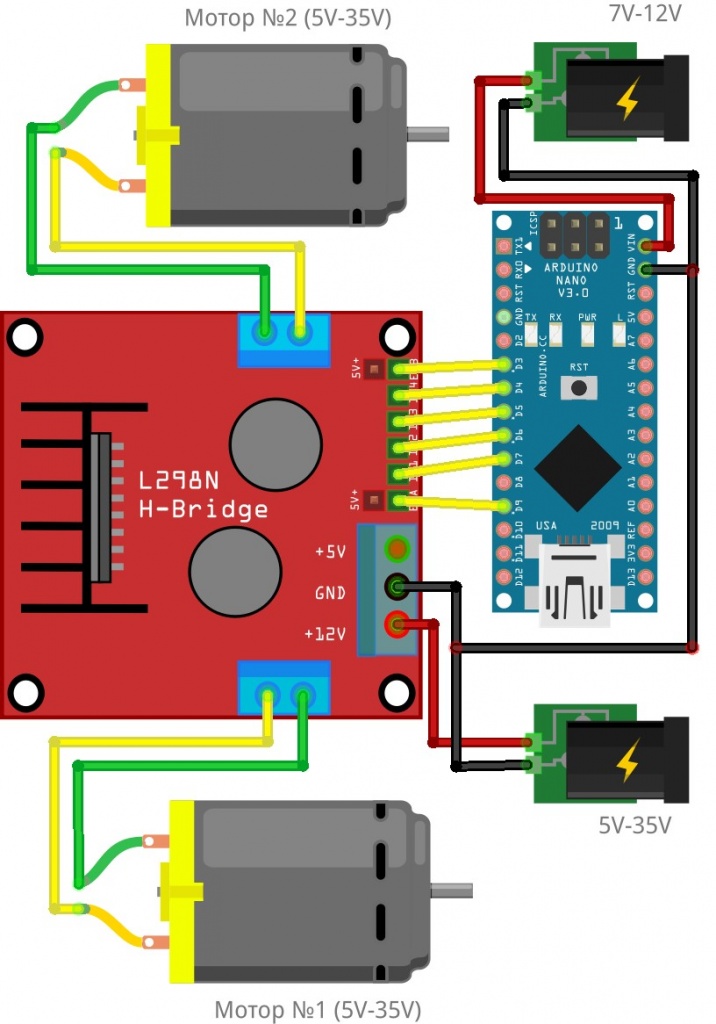 Модуль драйвера двигателя получает вход низкого напряжения от контроллера, такого как Arduino. Эта входная логика управляет направлением двигателей постоянного тока, подключенных к драйверу. Проще говоря, вы можете управлять направлением двигателей постоянного тока, задавая соответствующую логику модулю драйвера двигателя.
Модуль драйвера двигателя получает вход низкого напряжения от контроллера, такого как Arduino. Эта входная логика управляет направлением двигателей постоянного тока, подключенных к драйверу. Проще говоря, вы можете управлять направлением двигателей постоянного тока, задавая соответствующую логику модулю драйвера двигателя.
Модуль драйвера двигателя состоит из ИС драйвера двигателя, которая является сердцем модуля. Одна ИС может управлять двигателем постоянного тока, но использование модуля упрощает взаимодействие с Arduino.
Зачем нужен модуль привода двигателя?Все микроконтроллеры работают на низкоуровневых сигналах напряжения/тока, в отличие от двигателей. Например, микроконтроллер Arduino или PIC может выдавать максимальное напряжение 5 В или 3,3 В. Но приличному двигателю постоянного тока нужно как минимум 5 В или 12 В. Кроме того, ограничение выходного тока Arduino относительно очень низкое.
Следовательно, мощности Arduino недостаточно для питания двигателей.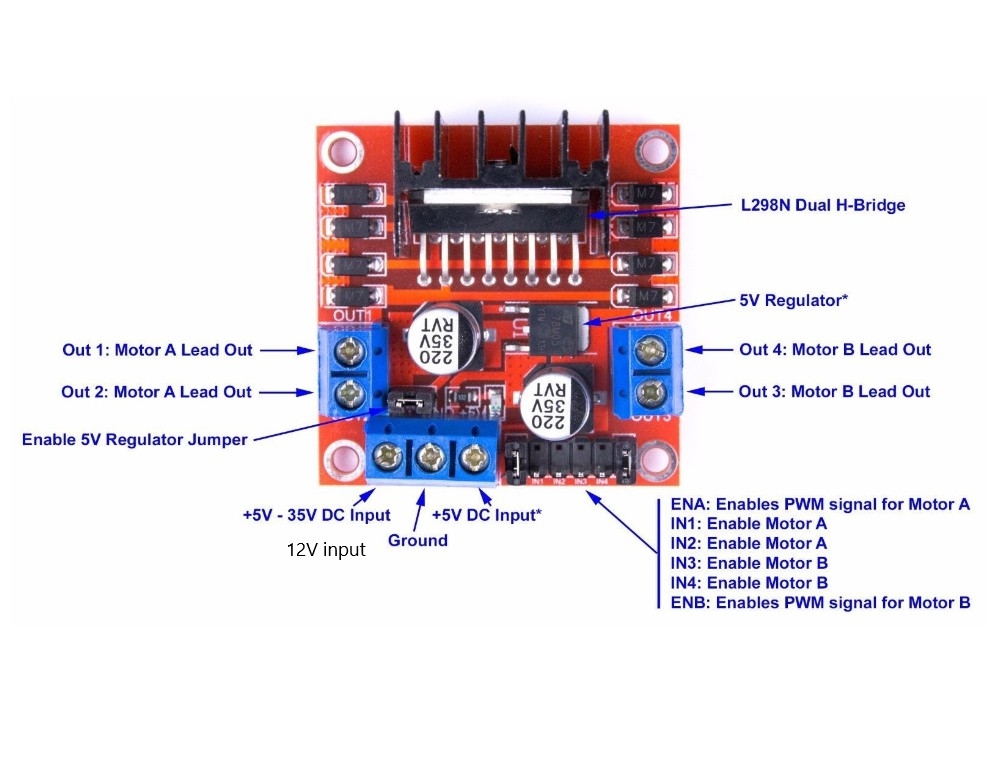 Для решения этой проблемы необходимо использование драйвера двигателя. Мы устраняем разрыв между Arduino и двигателем, вводя драйвер двигателя между ними. А для подачи напряжения/тока, необходимого для работы двигателя, к модулю драйвера двигателя подключается внешний источник питания.
Для решения этой проблемы необходимо использование драйвера двигателя. Мы устраняем разрыв между Arduino и двигателем, вводя драйвер двигателя между ними. А для подачи напряжения/тока, необходимого для работы двигателя, к модулю драйвера двигателя подключается внешний источник питания.
Драйвер двигателя L298N основан на конфигурации H-моста (H-мост — это простая схема, которая позволяет нам управлять двигателем постоянного тока, чтобы он двигался назад или вперед.), который полезен для управления направлением вращения двигателя постоянного тока.
Это сильноточный двойной драйвер полного H-моста , который предназначен для приема стандартных логических уровней TTL. Его также можно использовать для управления индуктивными нагрузками, т.е. реле , соленоиды, двигатели (постоянный ток и шаговый двигатель) и т. д. Схема Н-моста выглядит следующим образом:
Схема Н-моста СхемаИсточник изображения: Википедия
Направление вращения двигателя зависит от положения переключателя .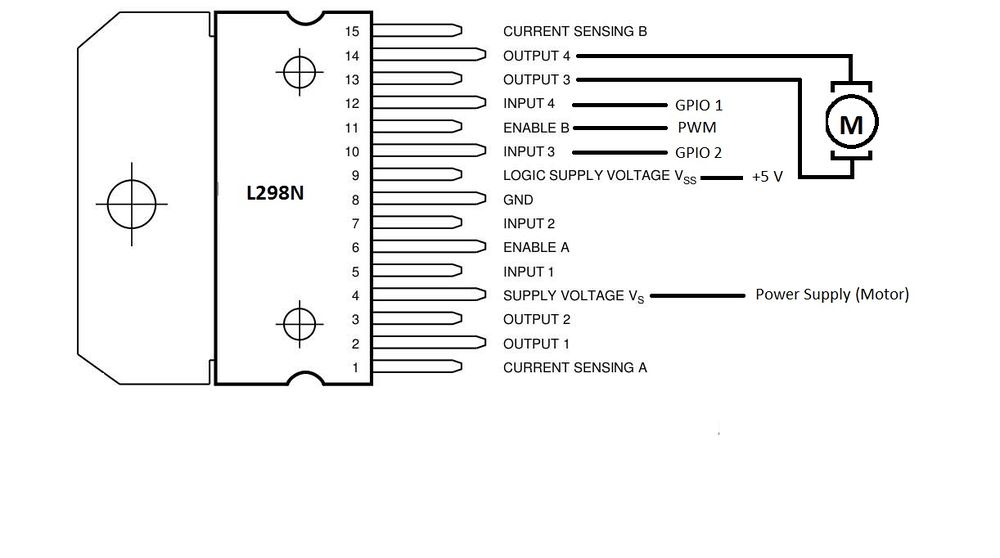
Источник изображения: Википедия
Когда S1 и S4 включены, а S2 и S3 выключены, левая сторона клеммы двигателя более положительная, чем другая клемма. Это вызывает вращение двигателя по часовой стрелке.
Когда S2 и S3 включены, а S1 и S4 выключены, правая сторона клеммы двигателя имеет более +ve, чем левая клемма. Это вызывает вращение двигателя против часовой стрелки.
Конфигурация Н-моста обычно используется для переключения направления вращения двигателя. Однако его также можно использовать для «торможения» двигателя. Это приводит к мгновенной остановке двигателя, когда его клеммы замыкаются накоротко, или позволяет двигателю «свободно двигаться» до остановки (выбег), поскольку двигатель надежно отделен от цепи.
В таблице ниже подытожены действия, где S1-S4 соответствуют диаграмме выше:
| S1 | С2 | С3 | С4 | Результат |
| 1 | 0 | 0 | 1 | Мотор поворота вправо |
| 0 | 1 | 1 | 0 | Двигатель поворота влево |
| 0 | 0 | 0 | 0 | Автокасты |
| 1 | 0 | 0 | 0 | |
| 0 | 1 | 0 | 0 | |
| 0 | 0 | 1 | 0 | |
| 0 | 0 | 0 | 1 | |
| 0 | 1 | 0 | 1 | Моторный тормоз |
| 1 | 0 | 1 | 0 | |
| Х | х | 1 | 1 | Короткое замыкание |
| 1 | 1 | х | х |
ПРИМЕЧАНИЕ.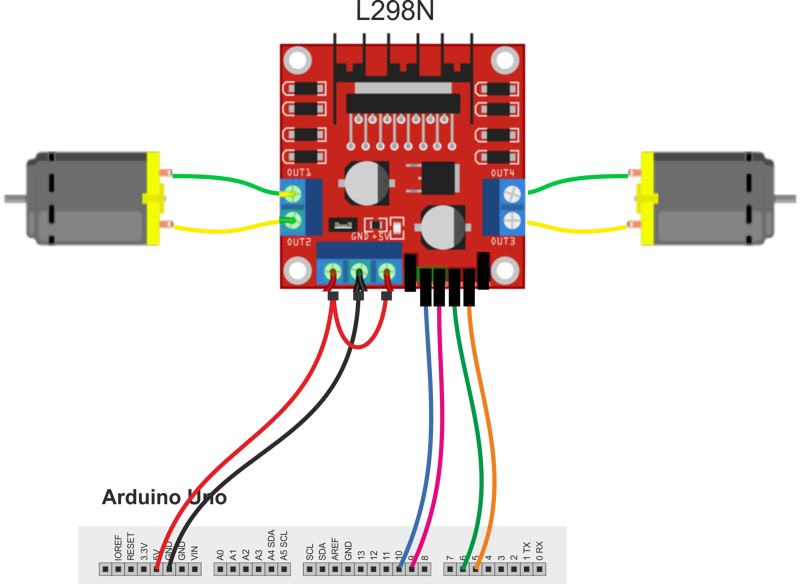 L298N имеет две таких схемы Н-моста, что означает, что с его помощью вы можете управлять двумя двигателями постоянного тока.
L298N имеет две таких схемы Н-моста, что означает, что с его помощью вы можете управлять двумя двигателями постоянного тока.
- Рабочее напряжение питания до 46 В
- Суммарный постоянный ток до 4 А. 2 А на канал
- Низкое напряжение насыщения
- Защита от перегрева
- Напряжение логического входа до 1,5 В
- Высокая помехоустойчивость
Модуль драйвера двигателя L298N состоит из двойного Н-моста L298 IC, регулятора напряжения 78M05 5 В, резисторов, конденсатора, светодиода питания, перемычки 5 В.
Выводы модуля драйвера двигателя L298N 2 выходных контакта двигателя постоянного тока, внешний источник питания двигателя 12 В, контакты управления направлением вращения двигателя (IN1, IN2, IN3, IN4), контакты включения выхода двигателя (ENA, ENB) и радиатор .
| Контакт VCC подает питание на двигатель. Напряжение может быть от 5 до 35 В. Помните, что если установлена перемычка 5V-EN, вам необходимо подать на 2 вольта больше, чем фактическое напряжение, требуемое для двигателя, чтобы двигатель работал на максимальной скорости. GND — общий контакт заземления. 5V контакт подает питание на логическую схему переключения внутри микросхемы L298N. Если установлена перемычка 5V-EN, этот контакт действует как выход и может использоваться для питания Arduino. Если перемычка 5V-EN снята, вам необходимо подключить ее к контакту 5V на Arduino. Контакты ENA используются для управления скоростью двигателя А. Подача на этот вывод ВЫСОКОЙ логики заставляет двигатель А вращаться, подача на него НИЗКОЙ логики приводит к остановке двигателя. Сняв перемычку и подключив этот контакт к входу ШИМ, мы можем управлять скоростью двигателя А. Контакты IN1 и IN2 используются для управления направлением двигателя А. Если IN1 имеет ВЫСОКИЙ уровень, а IN2 — НИЗКИЙ, двигатель А вращается в определенном направлении. Чтобы изменить направление, сделайте IN1 LOW и IN2 HIGH. Если оба входа имеют ВЫСОКИЙ или НИЗКИЙ уровень, двигатель А останавливается. Контакты IN3 и IN4 используются для управления направлением вращения двигателя B. Если IN3 имеет ВЫСОКИЙ уровень, а IN4 — НИЗКИЙ уровень, двигатель B вращается в определенном направлении. Чтобы изменить направление, установите IN3 LOW и IN4 HIGH. Если оба входа имеют ВЫСОКИЙ или НИЗКИЙ уровень, двигатель B останавливается. Контакт ENB может использоваться для управления скоростью двигателя B. Подача на этот контакт сигнала HIGH заставляет двигатель B вращаться, подача сигнала LOW приводит к остановке двигателя. Устранение перемычки и сопряжение этого контакта с информацией ШИМ позволяет нам управлять скоростью двигателя B. Контакты OUT1 и OUT2 подключены к двигателю A. Контакты OUT3 и OUT4 подключены к двигателю B. |


ВЫВОДЫ L298N Motor Driver IC: Выводы L298N IC
| L298N IC08 5 контактов | Имя | Функция |
| 1,15 | Чувство А, Чувство Б | Между этим выводом и землей подключен чувствительный резистор для управления током нагрузки. |
| 2,3 | Выход 1, Выход 2 | Выходы моста А; ток, протекающий через нагрузку, подключенную между этими двумя контактами, контролируется на контакте 1. |
| 4 | против | Напряжение питания для силовых выходных каскадов. Между этим контактом и землей должен быть подключен безиндуктивный конденсатор емкостью 100 нФ. |
| 5,7 | Вход 1, Вход 2 | TTL-совместимые входы моста A. |
| 6,11 | Включить А, Включить В | TTL Compatible Enable Input: состояние L отключает мост A (включение A) и/или мост B (включение B). |
| 8 | ЗЕМЛЯ | Земля |
| 9 | ВСС | Напряжение питания для логических блоков. (Конденсатор A100 нФ должен быть подключен между этим контактом и землей.) |
| 10,12 | Вход 3, Вход 4 | TTL-совместимые входы моста B. |
| 13,14 | Выход 3, Выход 4 | Выходы моста B. Ток, протекающий через нагрузку, подключенную между этими двумя выводами, контролируется на выводе. |
Где купить драйвер двигателя L298N?
Этот модуль драйвера двигателя можно легко найти в местном магазине электроники. Для покупок в Интернете мы рекомендуем это лучшее предложение на Amazon:
IC драйвера двигателя L298N Техническое описание:
Щелкните эту ссылку, чтобы просмотреть ТЕХНИЧЕСКОЕ ОПИСАНИЕ.
Подробную информацию об микросхеме L298N можно найти в таблице данных, приведенной выше. Спецификации и информацию, такую как абсолютные максимальные номиналы, блок-схему и рекомендуемые схемы, можно найти в техническом описании.
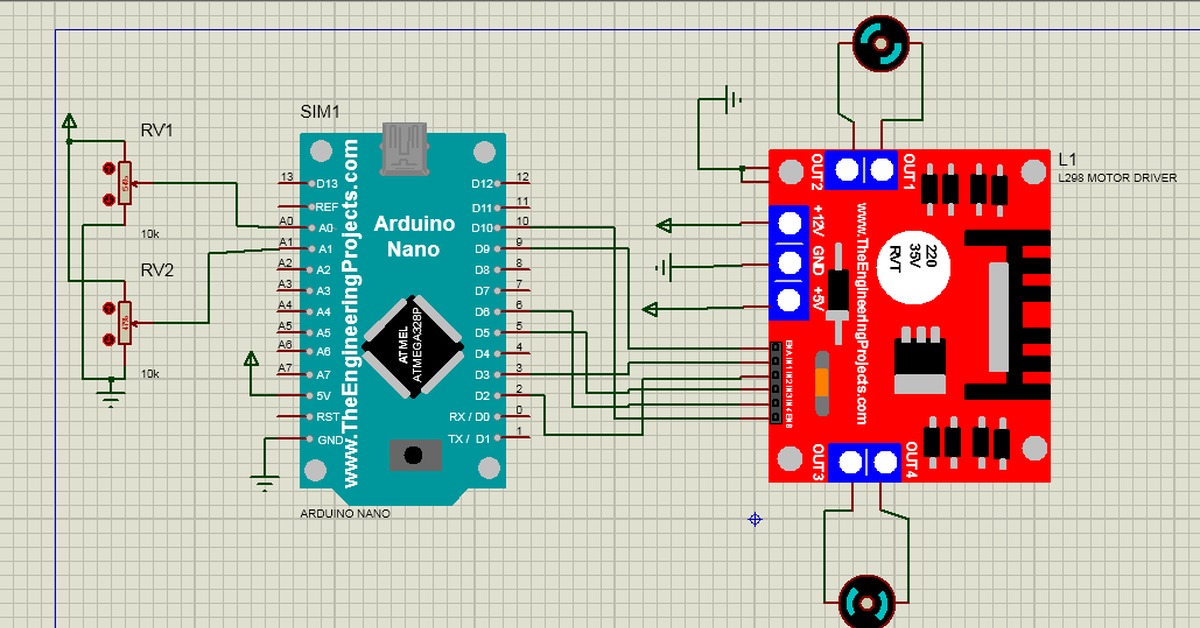
Схема подключения L29N к Arduino UNO:Схема подключения Arduino к L298N
Источник изображения: hackster.io
Рубрики ИС и КОМПОНЕНТЫ, СТАТЬИ, РаспиновкаВзаимодействие L298N драйвера двигателя H-моста с Raspberry Pi | by Sharad Rawat
Во-первых, если вы еще не читали мой предыдущий блог о том, как настроить Raspberry Pi без кабеля HDMI и монитора, то быстро прочитайте этот блог.
Подключение к Raspberry Pi 4 через SSH с кабелем LAN без HDMI/монитора
Недавно я получил новый RPi 4B и изо всех сил пытался начать работу с ним. Я просмотрел много руководств, но большинство из них…
medium.com
Теперь продолжим наше путешествие. В этот момент вы, вероятно, задаетесь вопросом какое путешествие , есть ли пункт назначения? Ну, есть. Я буду подробно рассказывать об этом в другом отдельном блоге (да, мне немного лень писать блоги, извините ;()). колеса. Чтобы защитить контроллер от несовместимости текущего использования, используется драйвер двигателя. Чтобы узнать больше о том, что такое драйверы двигателей и для чего они используются, прочитайте этот удивительный блог.
Я буду подробно рассказывать об этом в другом отдельном блоге (да, мне немного лень писать блоги, извините ;()). колеса. Чтобы защитить контроллер от несовместимости текущего использования, используется драйвер двигателя. Чтобы узнать больше о том, что такое драйверы двигателей и для чего они используются, прочитайте этот удивительный блог.
Что такое драйвер двигателя и зачем он нам нужен с Raspberry Pi
Для двигателей требуется ток, превышающий ток, который может выдержать Raspberry Pi…
www.fllcasts.com
В этом блоге мы свяжем H-мост L298N с raspeberry pi и запустим скрипт на pi для перемещения робота. Это будет разделено на 2 раздела.
- Интеграция оборудования
- Программное обеспечение и тестирование
Поехали.
- Аппаратная интеграция
Сначала поговорим о L298N.
L298N — Драйвер двигателя моста H. У нас есть 4 двигателя постоянного тока 6 В, и у нас есть только два выхода двигателя, поэтому 2 двигателя будут использовать один и тот же выход двигателя от Н-моста. Следовательно, 2 двигателя подключаются к выходу двигателя A, а остальные 2 двигателя подключаются к выходу двигателя B.
Следовательно, 2 двигателя подключаются к выходу двигателя A, а остальные 2 двигателя подключаются к выходу двигателя B.
Перед тем, как подключить драйвер двигателя к пи, давайте позаботимся о блоке батарей, который будет питать двигатели. +ve аккумуляторной батареи подключается к разъему питания, как показано на изображении, а -ve аккумуляторной батареи подключается к GND.
После правильного подключения аккумуляторной батареи к Н-мосту загорится красный индикатор.
Красный индикатор загорается при включении питания. Теперь давайте подключим H-мост к raspberry pi.
Комбинаций подключения L298N к pi может быть много. Это один из них:
2. Программное обеспечение и тестирование
Теперь, когда аппаратное обеспечение H-Bridge было сопряжено с Pi, давайте напишем программу на Python для запуска этого оборудования и посмотрим некоторые действия; п.
импортировать RPi.GPIO как gpio
импортировать timedef init():
gpio.setmode(gpio.BCM)
gpio.setup(17, gpio.OUT)
gpio.setup(22, gpio.OUT)
gpio.setup (23, gpio.OUT)
gpio.setup(24, gpio.OUT)def forward(sec):
init()
gpio.output(17, False)
gpio.output(22, True)
gpio.output (23, True)
gpio.output(24, False)
time.sleep(sec)
gpio.cleanup() def reverse(sec):
init()
gpio.output(17, True)
gpio.output (22, Ложь)
gpio.output(23, False)7
gpio.output(24, True)
time.sleep(sec)
gpio.cleanup()def left_turn(sec):
init()
gpio.output(17, True )
gpio.output(22, False)
gpio.output(23, True)
gpio.output(24, False)
time.sleep(sec)
gpio.cleanup()def right_turn(sec):
init( )
gpio.output(17, False)
gpio.output(22, True)
gpio.output(23, False)
gpio.output(24, True)
time.sleep(sec)
gpio.cleanup() секунды = 3time.sleep (секунды)
печать («вперед»)
вперед (секунды)
time.sleep (секунды-2) печать («вправо»)
right_turn (секунды)
time.