Как подключить гироскоп MPU-6050 к Arduino. Какие возможности дает этот датчик. Как считывать данные с акселерометра и гироскопа. Как использовать MPU-6050 в проектах робототехники.
Что такое MPU-6050 и для чего он используется
MPU-6050 — это популярный инерциальный измерительный модуль (IMU), который объединяет в себе 3-осевой акселерометр и 3-осевой гироскоп. Этот компактный датчик позволяет измерять линейное ускорение и угловую скорость по трем осям, что делает его незаменимым для многих проектов робототехники и электроники.
Основные возможности MPU-6050:
- Измерение ускорения по осям X, Y, Z
- Измерение угловой скорости вокруг осей X, Y, Z
- Встроенный датчик температуры
- Интерфейс I2C для подключения к микроконтроллерам
- Напряжение питания 3.3-5В
- Высокая чувствительность и точность измерений
MPU-6050 активно применяется в таких областях как:
- Стабилизация дронов и квадрокоптеров
- Создание систем навигации роботов
- Отслеживание движений в игровых контроллерах
- Измерение вибраций и ударных нагрузок
- Разработка носимой электроники
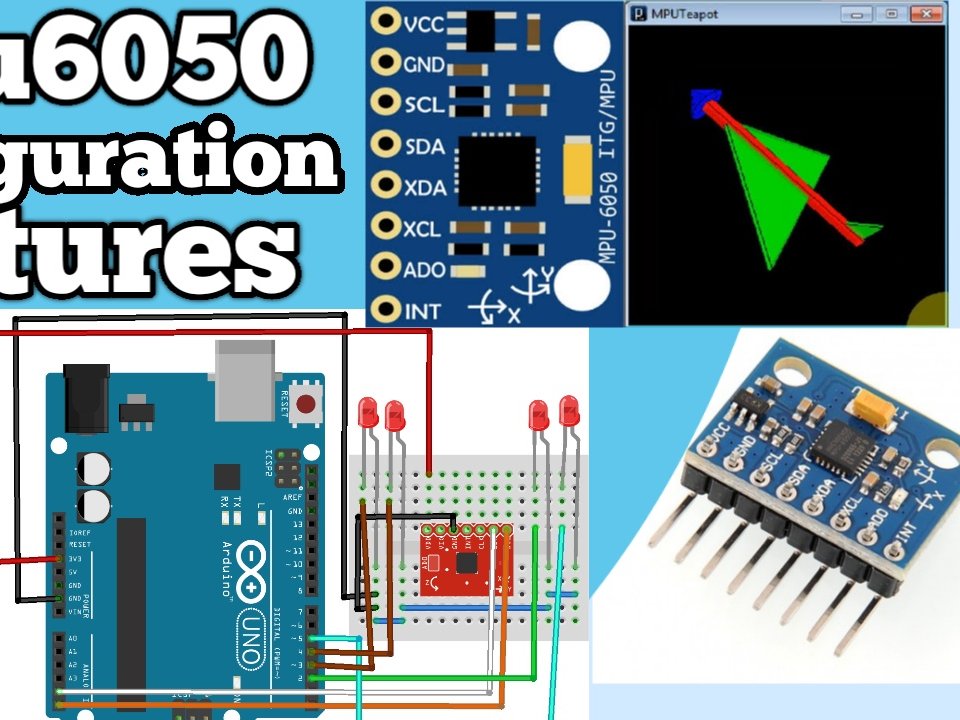
Подключение MPU-6050 к Arduino
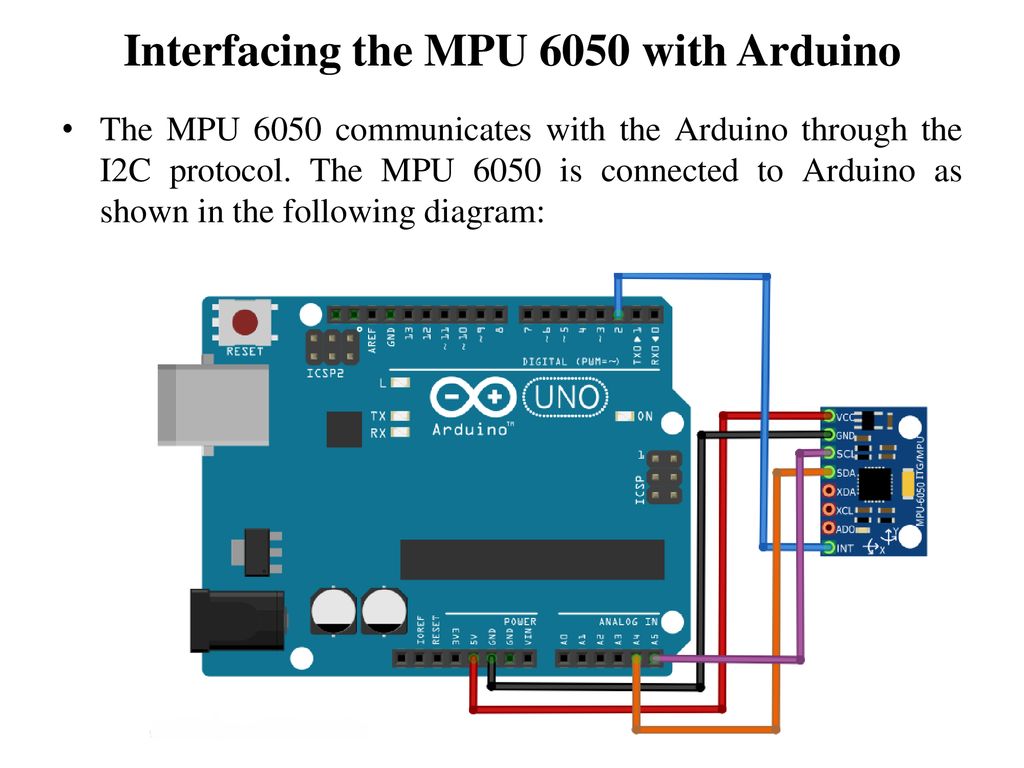
Подключение MPU-6050 к Arduino осуществляется по интерфейсу I2C, что требует всего 4 проводов. Схема подключения выглядит следующим образом:
- VCC MPU-6050 -> 5V Arduino
- GND MPU-6050 -> GND Arduino
- SCL MPU-6050 -> A5 Arduino
- SDA MPU-6050 -> A4 Arduino
Дополнительно можно подключить вывод INT MPU-6050 к цифровому пину Arduino для использования прерываний. Это позволит более эффективно считывать данные с датчика.
Программирование MPU-6050 на Arduino
Для работы с MPU-6050 на Arduino рекомендуется использовать библиотеку MPU6050. Она значительно упрощает процесс инициализации датчика и получения данных. Вот простой пример кода для считывания показаний акселерометра и гироскопа:
«`cpp #includeЭтот код инициализирует MPU-6050, проверяет подключение и в цикле считывает показания акселерометра и гироскопа, выводя их в последовательный порт.

Калибровка MPU-6050
- Размещение датчика на ровной неподвижной поверхности
- Сбор серии измерений в состоянии покоя
- Расчет среднего смещения для каждой оси
- Корректировка показаний на величину смещения
Вот пример простой функции для калибровки смещения нуля MPU-6050:
«`cpp void calibrateMPU6050(int16_t *axOffset, int16_t *ayOffset, int16_t *azOffset, int16_t *gxOffset, int16_t *gyOffset, int16_t *gzOffset) { int32_t axSum = 0, aySum = 0, azSum = 0; int32_t gxSum = 0, gySum = 0, gzSum = 0; int16_t ax, ay, az, gx, gy, gz; int samples = 1000; for(int i = 0; i < samples; i++) { mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); axSum += ax; aySum += ay; azSum += az; gxSum += gx; gySum += gy; gzSum += gz; delay(2); } *axOffset = axSum / samples; *ayOffset = aySum / samples; *azOffset = azSum / samples - 16384; // 1g в направлении оси Z *gxOffset = gxSum / samples; *gyOffset = gySum / samples; *gzOffset = gzSum / samples; } ``` После калибровки полученные значения смещения нужно вычитать из показаний датчика для получения откорректированных данных.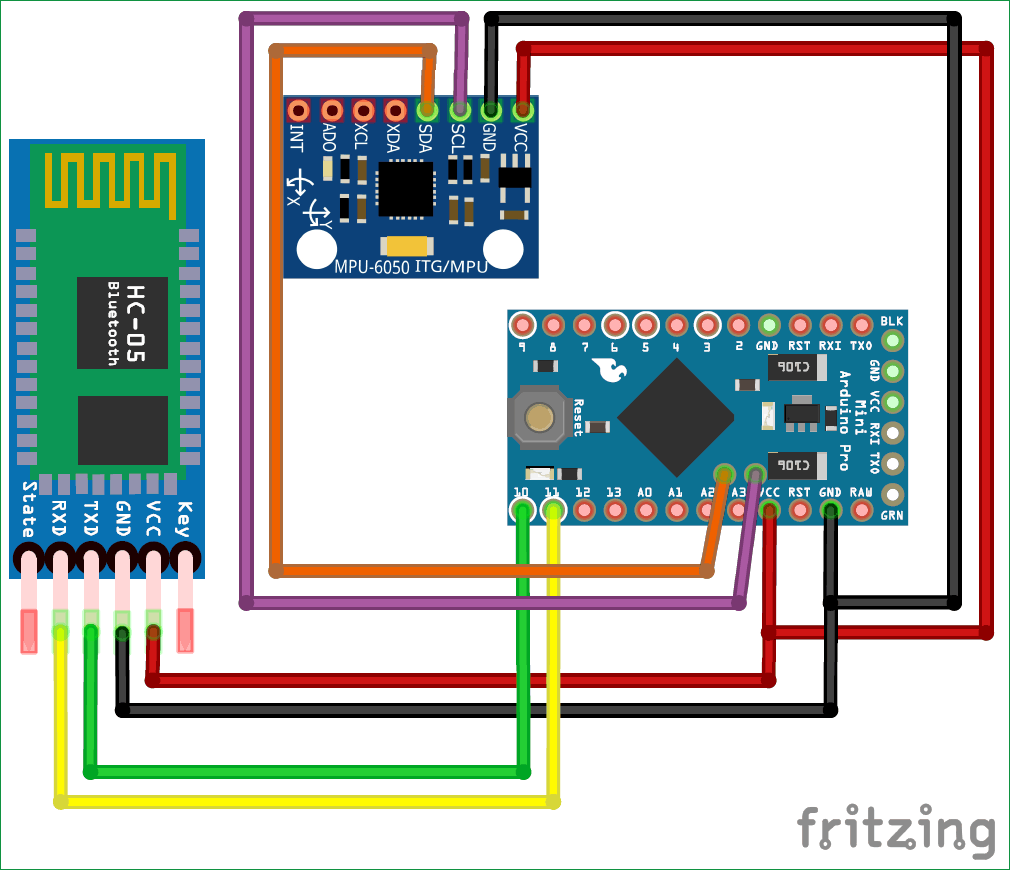
Вычисление углов наклона
Одно из основных применений MPU-6050 — определение углов наклона устройства. Для этого используются показания акселерометра. Углы наклона можно рассчитать по следующим формулам:
- Угол крена (roll) = atan2(ay, az) * 180/PI
- Угол тангажа (pitch) = atan2(-ax, sqrt(ay*ay + az*az)) * 180/PI
Вот пример функции для вычисления углов наклона:
«`cpp void calculateTiltAngles(int16_t ax, int16_t ay, int16_t az, float *roll, float *pitch) { *roll = atan2(ay, az) * 180/PI; *pitch = atan2(-ax, sqrt(ay*ay + az*az)) * 180/PI; } «`Применение фильтра Калмана
Для повышения точности определения ориентации устройства часто применяют фильтр Калмана. Этот алгоритм позволяет объединить данные акселерометра и гироскопа, компенсируя недостатки каждого из датчиков.
Основные преимущества использования фильтра Калмана:
- Снижение шума и вибраций в показаниях
- Компенсация дрейфа гироскопа
- Быстрая реакция на изменения ориентации
- Точное определение углов даже при длительной работе
Реализация фильтра Калмана требует дополнительных вычислений, но значительно улучшает качество получаемых данных.

Использование DMP в MPU-6050
MPU-6050 имеет встроенный процессор цифровой обработки движения (DMP — Digital Motion Processor). DMP может выполнять сложные вычисления и фильтрацию данных непосредственно на чипе, снижая нагрузку на основной микроконтроллер.Основные преимущества использования DMP:
- Получение готовых кватернионов ориентации
- Встроенная фильтрация и обработка данных
- Возможность получения данных через прерывания
- Снижение вычислительной нагрузки на Arduino
Для работы с DMP требуется использование специальных библиотек, таких как I2Cdev и MPU6050_6Axis_MotionApps20.
Заключение
MPU-6050 — это мощный и универсальный инерциальный датчик, который открывает широкие возможности для создания различных проектов робототехники и электроники. Правильное подключение, калибровка и обработка данных MPU-6050 позволяют получить точную информацию об ориентации и движении устройства в пространстве.
Ключевые моменты при работе с MPU-6050:
- Используйте библиотеки для упрощения взаимодействия с датчиком
- Проводите калибровку для устранения смещения нуля
- Применяйте фильтрацию данных для повышения точности
- Рассмотрите возможность использования DMP для сложных вычислений
- Экспериментируйте с различными алгоритмами обработки данных
С помощью MPU-6050 вы сможете реализовать множество интересных проектов, от простых измерителей наклона до сложных систем стабилизации и навигации.

Гіроскоп для Arduino і Raspberry Pi купити в Україні
Гіроскоп / Troyka-модуль
Ви ніколи не думали, з якою швидкістю обертається балерина виконуючи фуете? Звичайно, для вирішення цієї задачі можна було б використовувати простий магніт на її нозі і геркон. Але як же бути з повітряними гімнастами, адже вони можуть обертатися в трьох площинах? Визначити який гімнаст обертається швидше допоможе трехосевой гіроскоп.
Відеоогляд
Загальні відомості
Гіроскоп з лінійки Troyka-модулів виміряє кутову швидкість навколо власних осей X, Y, Z. Це властивість стати в нагоді для стабілізації літального апарату з літаковим кутах: тангаж, крен і рискання.
Модуль заснований на чіпі гіроскопаL3G4200D. Мікросхема має вбудований датчик температури для точної роботи сенсора навіть в екстремальних умовах.
Гіроскоп спільно з акселерометром застосовується для відстеження кута повороту в сучасному смартфоні.
Якщо вам необхідно визначити положення вашого девайса в просторі і немає бажання возитися з модулями окремо: зверніть увагу на IMU-сенсор 10 ступенів свободи, в якому ми розпаяли всі чіпи на одній платі.
Особливості
- Форм-фактор Troyka — практичне рішення для початківців та досвідчених мейкерів.
- Сумісність з напругою живлення і логіки 3,3–5 Ст.
Підключення
Гіроскоп підключається до електроніці через дві групи Troyka-контактів.
Контакти харчування
| Контакт | Функція | Підключення |
|---|---|---|
| V | Харчування | Підключіть до живлення мікроконтролера. |
| G | Земля | Підключіть до землі мікроконтролера. |
Контакти даних
| Контакт | Функція | Підключення |
|---|---|---|
| D | Дані шини I2C | Підключіть до піну SDA мікроконтролера. |
| C | Тактування шини I2C | Підключіть до піну SCL мікроконтролера. |
При підключенні до платформах форм-фактору Arduino R3 рекомендуємо використовувати Troyka Shield або Troyka Slot Shield. А для комп’ютерів Raspberry Pi передбачений Troyka HAT. Також модуль фізично сумісний з breadboard’ом.
Програмування
Гіроскоп спілкується з мікроконтролером через інтерфейс I2C. Для програмної роботи з датчиком використовуйте бібліотеки і функції, які полегшують складання коду програми.
- Бібліотека для Arduino
Комплектація
- 1× Гіроскоп / Troyka-модуль
- 2× Трипровідною шлейф
Характеристики
- Модель: Гіроскоп v1 / Troyka-модуль / AMP-B032
- Чіп: L3G4200D
- Вхідна напруга живлення Vcc: 3,3–5 В
- Споживаний струм Icc: до 10 мА
- Логічне напруга рівнів:
- Вхід: 3,3–5 В
- Вихід: 3,3–5 В
- Апаратний інтерфейс: Troyka-контакти S-V-G
- Програмний інтерфейс: I2C
- I2C-адреса:
- Без перемички: 0x68
- З перемичкою: 0x69
- Кількість ступенів свободи: 3 (X, Y, Z)
- Діапазон вимірювань: ±250 / ±500° / ±2000 °/з
- Чутливість: 8,7×10-3 °/с
- Розміри: 25,4×25,4 мм
Ресурси
- Що таке Troyka-модулі
- Керівництво по використанню
Бібліотеки
- Бібліотека для Arduino
Документація
- Datasheet на чіп гіроскопа L3G4200D
Подключение mpu 6050
Вставьте код как положено.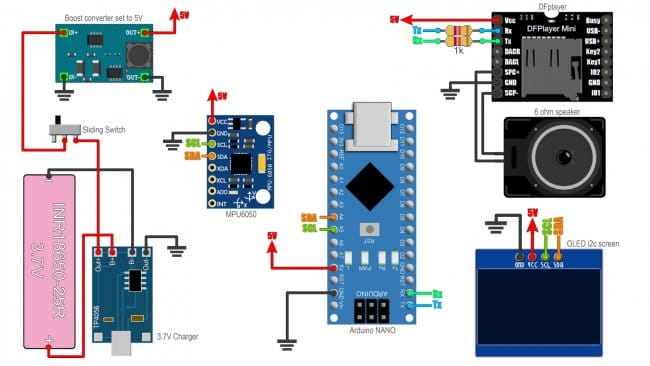
Поиск данных по Вашему запросу:
Подключение mpu 6050
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Гироскоп MPU-6050 + акселерометр Отзывы:
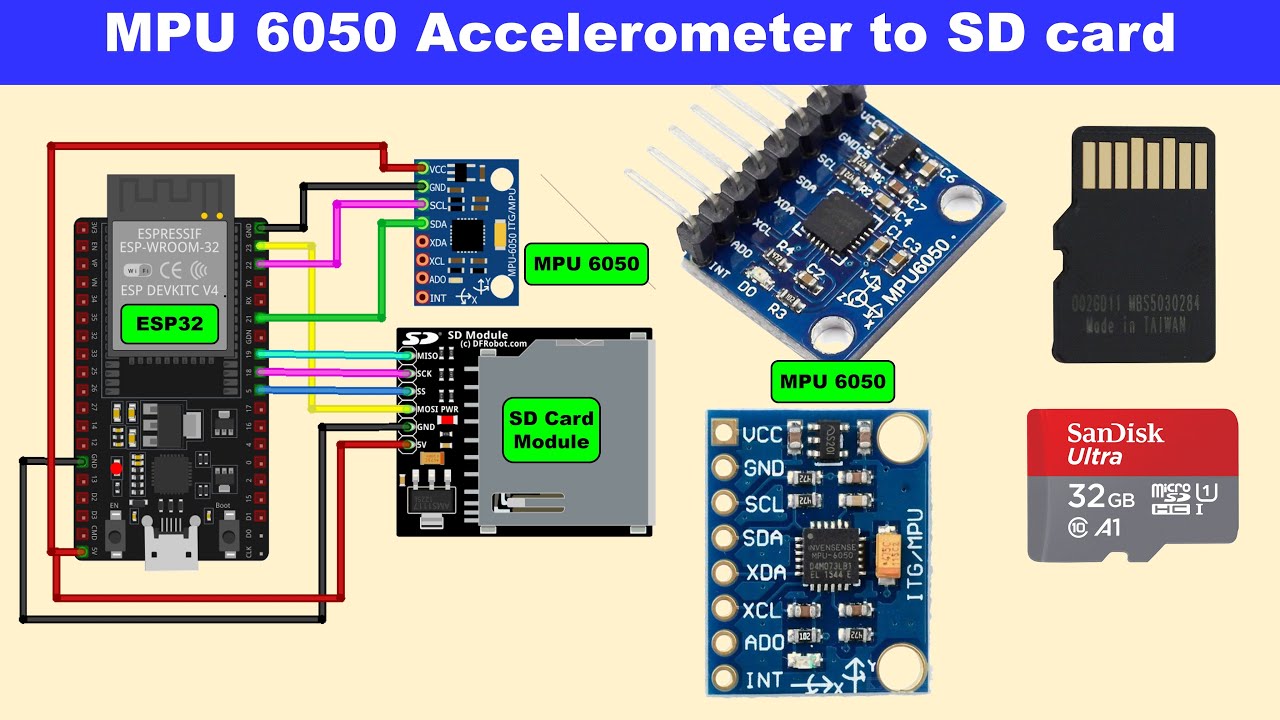
- Подключение гироскопа-акселерометра MPU6050 к Wemos d1
- Подключение Atmega8 с MPU6050
- Arduino и MPU6050 для определения угла наклона
- Акселерометр и гироскоп MPU6050
- Подключение 3х осевого гироскопа MPU-6050 к Arduino и 2 сервопривода
- Подключение гироскопа-акселерометра MPU6050 к Wemos d1
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: MPU-6050 — Гироскоп + акселeрометр
Гироскоп MPU-6050 + акселерометр Отзывы:
Тема в разделе » Схемотехника, компоненты, модули «, создана пользователем pyro , 17 апр Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. Вопросы по гироскопу MPU Тема в разделе » Схемотехника, компоненты, модули «, создана пользователем pyro , 17 апр Есть такая штука , и есть несколько вопросов по подключению.
Всегда первым делом ищите даташит на чип или устройство. После прочтения десятка даташитов вы начнете щелкать их как семечки. Как правило в даташитах все очень детально расписано. Поэтому, если научиться читать даташиты, большинство устройств можно будет подключать не копаясь в инете в поисках примеров.
Megakoteyka нравится это. С английским у меня очень туго. С пасибо за ссылки, но есть у меня даташит. Если бы он мне помог, я бы не тревожил вопросами.
Может кто то поможет мне, обьяснив все на понятном мне языке? Вы сформулируйте проблему развернуто. Поможем конечно. В качестве лирического отступления хотел бы высказаться еще относительно ноги INT. Я обратил внимание на то, что в большинстве проектов на Ардуино, в большинстве шилдов, и в большинстве библиотек, в том числе официальных, используется поллинг.
И практически нет работы с прерываниями. Как следствие, например, при использовании официальных библиотек затруднительно задействовать полностью вычислительные мощности микроконтроллера и использовать режимы сна. Простой пример: команда analogRead. В теле процедуры analogRead есть такие строки: Код Text :. Да, я понимаю, что при создании базовых библиотек Ардуино в жертву простоте принесли функциональность.
Это оправданно. На собственном опыте знаю. Когда-то я был чайником в в микроконтроллерах, абсолютным нулем со стерильным умом.
В том и красота Ардуины — в простоте и почти безграничной возможности углубляться в предмет сколь угодно глубоко, пока не обнаружишь то, что прячется в тени Бозона Хиггса.
Спасиб, очень интересная информация, правда не все понял. Залил скетч в Дуню вот отсюда. Товарищи помогите пожалуйста, имею сей девайс. И не как не могу его завести. Всё проблема наверно в том, что я все программирую в Simulink coder для stm32 через некие блок-схемы.
Соеденил с raspberry по шине i2c , ПО необходимое установил, гироскоп по команде i2cdetect виден. Artemka , 24 янв Вы должны войти или зарегистрироваться, чтобы ответить. Показать игнорируемое содержимое. Ваше имя или e-mail: У Вас уже есть учётная запись? Нет, зарегистрироваться сейчас. Да, мой пароль: Забыли пароль?
Подключение гироскопа-акселерометра MPU6050 к Wemos d1
GY рис. Гироскоп используется для измерения линейных ускорений, а акселерометр — угловых скоростей. Совместное использование акселерометра и гироскопа позволяет определить движение тела в трехмерном пространстве. После установки библиотек загрузим на плату Arduino скетч для отображения показаний акселерометра по одной из осей — оси x. Содержимое скетча показано в листинге 2. Для отображения данных выбираем в настройках Плоттер по последовательному соединению рис.
После установки библиотек загрузим на плату Arduino скетч для отображения показаний акселерометра по одной из осей — оси x. Содержимое скетча показано в листинге 2. Для отображения данных выбираем в настройках Плоттер по последовательному соединению рис.
Нужно отметить возможность MPU работать в мастер режиме I2C для AUX выводов, к которым можно подключить еще один.
Подключение Atmega8 с MPU6050
Модуль акселерометр-гироскоп GY это комбинация трех осевого гироскоп и акселерометр работающего в трех плоскостях. Построенный на архитектуре чипа MPU он спроектирован очень компактно и не займет много места в готовом устройстве. На плате размещены все необходимые элементы, в том числе и резисторы. Модуль управляться с микроконтроллером по средствам универсальной шины I2C, что значительно сокращает количество занятых выходов на микроконтроллере. Встроенный стабилизатор понижает входящее напряжение до 3. Библиотека для подключения акселерометра: MPU Данная программа считывает показания состояния акселерометра и гироскопа и выводит их в последовательный порт. Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino. Что бы прочитать данные из ком порта, выберите ниже используемый ардуиной COM порт, скорость и нажмите Connect.
Для прошивки Arduino uno r3 необходимо всего лишь выбрать в выпадающем списке ниже, Вашу плату, указать порт и нажать Run on Arduino. Что бы прочитать данные из ком порта, выберите ниже используемый ардуиной COM порт, скорость и нажмите Connect.
Arduino и MPU6050 для определения угла наклона
Технический рынок наполнен тысячами модулями датчиков, которые стоят недорого и используются в проектном конструировании. Перед этим модули связывают с программируемым микроконтроллером. Акселерометр — инструмент, использующийся для расчета разности между настоящим и гравитационным ускорением предмета. Датчик состоит из платы со встроенной микросхемой.
Может кто-то сталкивался с такой задачей как вывести информацию от MPU
Акселерометр и гироскоп MPU6050
Для того чтобы наше устройство могло отображать и записывать в лог ускорение и перегрузки во время разгона, мы подключим к нему популярный высокоточный модуль GY , на основе чипа MPU , являющегося трех-осевым гироскопом и трех-осевым акселерометром.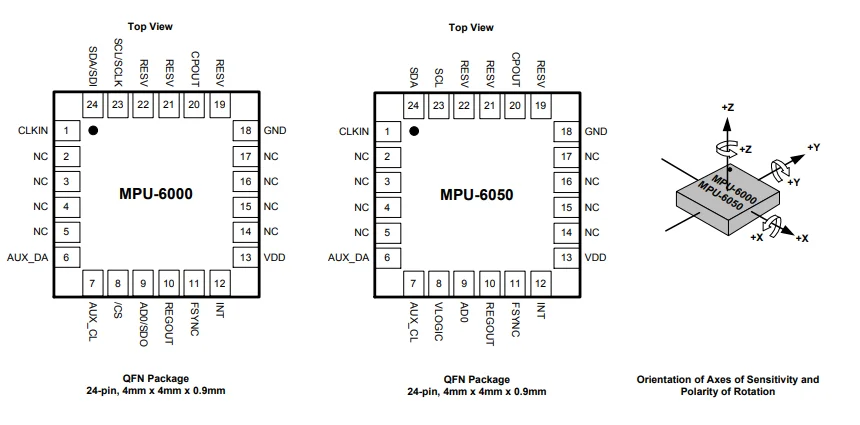 Гироскоп нам пока не понадобится, поэтому в этой части я буду рассказывать только про акселерометр. Скачать архив со скетчем: MPU Теперь, если вы откроете терминал com порта, то увидите примерно следующую картину: ускорение по трём осям, температура, углы положения по трем осям. Из даташита , мы знаем, что при настройке чувствительности акселерометра до 2g на каждую единицу g приходится единиц измерения датчика.
Гироскоп нам пока не понадобится, поэтому в этой части я буду рассказывать только про акселерометр. Скачать архив со скетчем: MPU Теперь, если вы откроете терминал com порта, то увидите примерно следующую картину: ускорение по трём осям, температура, углы положения по трем осям. Из даташита , мы знаем, что при настройке чувствительности акселерометра до 2g на каждую единицу g приходится единиц измерения датчика.
Подключение 3х осевого гироскопа MPU-6050 к Arduino и 2 сервопривода
Тема в разделе » Схемотехника, компоненты, модули «, создана пользователем pyro , 17 апр Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. Вопросы по гироскопу MPU Тема в разделе » Схемотехника, компоненты, модули «, создана пользователем pyro , 17 апр
Соединения выглядят хорошо. Модуль MPU имеет встроенный регулятор v.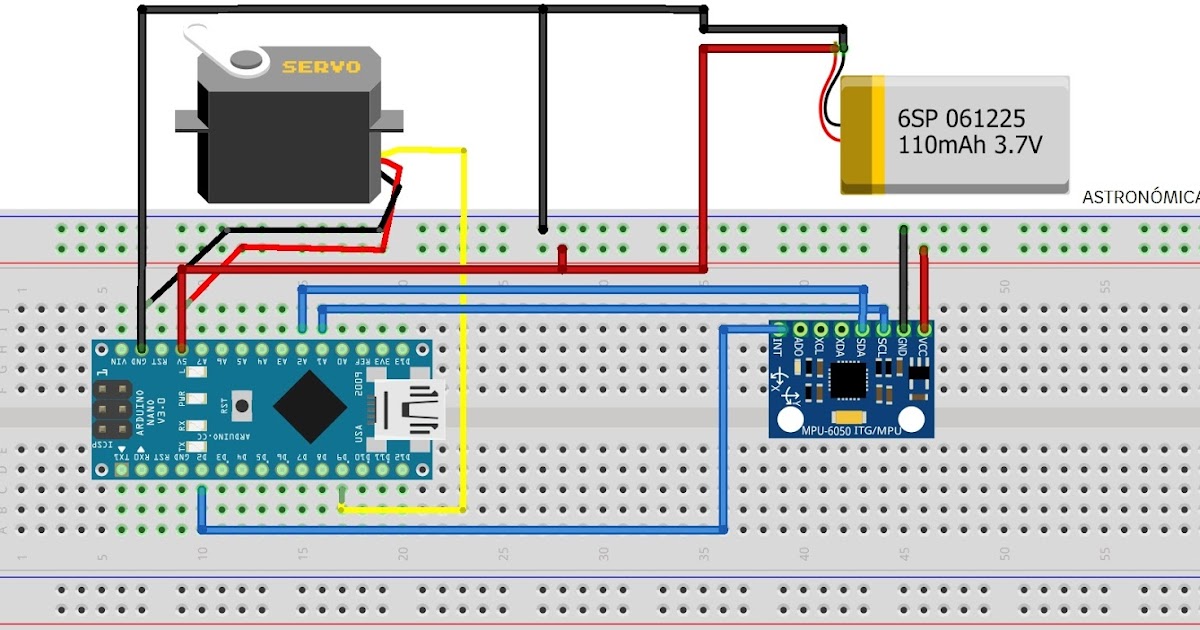 Модуль также имеет встроенные нагрузочные резисторы для связи.
Модуль также имеет встроенные нагрузочные резисторы для связи.
Подключение гироскопа-акселерометра MPU6050 к Wemos d1
Подключение mpu 6050
Подробная статья, чувствуется что автор хорошо владеет материалом. А не доводилось ли автору использовать MPU для вычисления траектории? Если такой опыт имеется, то прошу поделиться. Всё хорошо, но автору нужно быть корректнее.
Ардуино — популярнейшая система для одноимённых МК, позволяющая любому желающему, даже без специального образования, воплотить в жизнь проект, о котором он давно мечтал. Будь то автоматизированная теплица или простая система выключения света по хлопку в умном доме. Но естественно, сам микроконтроллер не способен выполнять все функции, и для этого к нему необходимо покупать датчики, коих на рынке более нескольких десятков разновидностей. Об одном из таких, а именно мы рассмотрим гироскоп Ардуино, и пойдёт речь.
Насмотрелся я в ютубе видосов про всякие гироскопы, ну и захотелось мне тоже с ними поиграться.
Для этого мини-проекта нам понадобятся:. Схема подключения датчика MPU к Ардуино выглядит следующим образом:. Далее подключаем сервоприводы:. Ниже представлены шаги сборки:. Вот и закончили мы со сборкой. Теперь осталось написать скетч, залить его на плату и готово! При наклоне по оси Y, будет вращаться один сервопривод.
Прежде чем приступить к рассмотрению модуля гироскопа и акселерометра, думаю, будет не лишним коротко разобраться что это такое. Гироскоп представляет собой устройство, реагирующее на изменение углов ориентации контролируемого тела. В классическом представлении это какой-то инерционный предмет, который быстро вращается на подвесах. Как результат вращающийся предмет всегда будет сохранять свое направление, а по положению подвесов можно определить угол отклонения.
Arduino 5-минутные уроки: Урок | Сообщество RobotShop
Проект
- 5-минутные уроки по Arduino: Урок 7 — Акселерометры, гироскопы, IMU
Введение
Добро пожаловать в 5-минутные учебные пособия RobotShop. Эта конкретная серия посвящена началу работы с Arduino и охватывает основные понятия, такие как базовая структура кода, взаимодействие с датчиками, исполнительными механизмами и многое другое. Акселерометры, гироскопы и IMU помогают определять линейное и угловое ускорение. В этом уроке рассматривается конкретный случай, когда датчик обеспечивает аналоговый выход, и описывается, для чего полезен каждый тип датчика. После завершения используйте оглавление, чтобы перейти к следующему уроку.
Эта конкретная серия посвящена началу работы с Arduino и охватывает основные понятия, такие как базовая структура кода, взаимодействие с датчиками, исполнительными механизмами и многое другое. Акселерометры, гироскопы и IMU помогают определять линейное и угловое ускорение. В этом уроке рассматривается конкретный случай, когда датчик обеспечивает аналоговый выход, и описывается, для чего полезен каждый тип датчика. После завершения используйте оглавление, чтобы перейти к следующему уроку.
-
5-минутные учебные пособия по Arduino: Урок 7 — Акселерометры, гироскопы, IMU
5-минутные учебные пособия по Arduino: Урок 7 — Акселерометры, гироскопы, IMU
5-минутные учебные пособия по Arduino: Урок 7 — Акселерометры, гироскопы, IMU
Меню уроков:
- Урок 1 – Загрузка/установка программного обеспечения и интерфейс
- Урок 2 – Базовый код
- Урок 3 – Датчики: потенциометры
- Урок 4 — Датчик: инфракрасное расстояние
- Урок 5 — Привод: серводвигатель
- Урок 6 — Сенсор: сила, изгиб, растяжение
- Урок 7 — датчик: акселерометр, гироскоп, IMU
- Урок 8 — Экран: Мост Уитстона и ЖК-дисплей
- Урок 9.
 Программирование платформ Arduino с использованием другой IDE
Программирование платформ Arduino с использованием другой IDE
Урок 7 Оборудование:
- Компьютер/ноутбук или нетбук
- Микроконтроллер Ардуино
- Адаптер USB-Serial (если ваш микроконтроллер не имеет USB-порта)
- Соответствующий USB-кабель (платы Arduino получают питание от USB-порта — аккумуляторов пока нет)
- Аналоговый акселерометр, гироскоп и/или IMU Разъемы
- (между IMU и Arduino
Акселерометры, гироскопы и IMU — невероятно полезные маленькие датчики, которые все больше и больше интегрируются в электронные устройства вокруг нас. Эти датчики используются в сотовых телефонах, игровых консолях, таких как беспроводной пульт дистанционного управления Wii, игрушках, самобалансирующихся роботах, костюмах для захвата движения и многом другом. Акселерометры используются в основном для измерения ускорения и наклона, гироскопы используются для измерения угловой скорости и ориентации, а IMU (которые сочетают в себе как акселерометры, так и гироскопы) используются для получения полного представления об ускорении, скорости, положении, ориентации и многом другом устройства.
При выборе акселерометра, гироскопа или IMU также важно учитывать тип выхода; в зависимости от типа датчика показания могут выводиться как:
- Последовательные данные (вывод Tx)
- I2C (ПДД, СКЛ)
- Аналог
- ТТЛ
- другие…
В этом уроке мы рассмотрим только аналоговый выход. Показанный ниже код включает в себя выходной сигнал для датчика с одной осью и коэффициенты для остальных значений.
Акселерометры измеряют ускорение по одной-трем линейным осям (x, y, z). Акселерометр с одной осью может измерять ускорение в любом направлении. Это может быть хорошо для ракеты, удара, поезда или другого сценария, когда устройство действительно движется в одном основном направлении. Зная ускорение и время, можно с помощью математики найти расстояние, пройденное объектом. На рынке все меньше и меньше одно- и двухосевых акселерометров, потому что трехосевой акселерометр может делать гораздо больше. Благодаря низкой себестоимости изготовления трехосные акселерометры ненамного дороже одно- или двухосных.
Ускорение свободного падения является постоянной величиной и фактически может быть измерено с помощью акселерометра. При размещении параллельно земле ускорение силы тяжести будет «ощущаться» только одной осью. Однако при наклоне это ускорение будет выглядеть как компоненты двух (или трех) осей. Вы можете получить представление о том, как использовать акселерометр для измерения наклона здесь и здесь.
Подключите акселерометр к Arduino; каждый выходной контакт подключается к одному из аналоговых контактов на Arduino, контакт Vin подключается к контакту 5 В на Arduino (прочитайте руководство пользователя, чтобы убедиться, что контакт Vin имеет напряжение 5 В, а не 3,3 В), а контакт GND подключается к контакт GND на Arduino. Обратите внимание, что нет необходимости в дополнительной электронике! Далее откройте пример скетча File -> Examples -> Sensors -> ADXL3xx. Загрузите в Arduino и посмотрите, как изменятся значения.
Чтобы правильно выбрать акселерометр, учитывайте максимальное линейное ускорение, которому будет подвергаться датчик.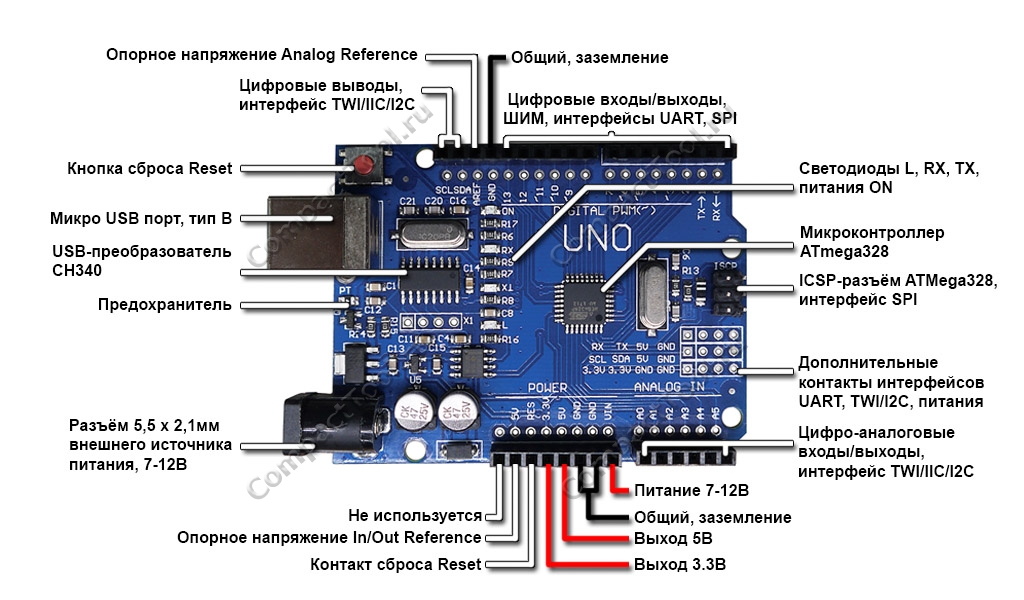 Если вы планируете добавить акселерометр к маленькому мобильному роботу, вы, скорее всего, будете использовать акселерометр 2g (даже это, вероятно, излишне), тогда как, если вы прикрепляете его к ракете, акселерометр 16g, вероятно, будет лучшим выбором. При подключении к 10-битному АЦП акселерометр 2g будет иметь точность 2/1024 = 0,002g, а акселерометр 16g будет иметь точность 16/1024 = 0,0156. Поэтому, если вам нужен только диапазон 2g, но вы покупаете акселерометр 16g, у вас будет только около 128 возможных показаний вместо полных 1024. И наоборот, если вы выберете акселерометр 2g, когда вам действительно нужен 16g, вы получите много «максимальных (1024)» показаний, так как ускорение «зашкаливает».
Если вы планируете добавить акселерометр к маленькому мобильному роботу, вы, скорее всего, будете использовать акселерометр 2g (даже это, вероятно, излишне), тогда как, если вы прикрепляете его к ракете, акселерометр 16g, вероятно, будет лучшим выбором. При подключении к 10-битному АЦП акселерометр 2g будет иметь точность 2/1024 = 0,002g, а акселерометр 16g будет иметь точность 16/1024 = 0,0156. Поэтому, если вам нужен только диапазон 2g, но вы покупаете акселерометр 16g, у вас будет только около 128 возможных показаний вместо полных 1024. И наоборот, если вы выберете акселерометр 2g, когда вам действительно нужен 16g, вы получите много «максимальных (1024)» показаний, так как ускорение «зашкаливает».
Гироскопы измеряют угловую скорость в α, β, γ (см. изображение ниже). Гироскопы можно использовать для стабилизации, а также для изменения направления и ориентации. В отличие от акселерометров, гироскопы не имеют фиксированной точки отсчета, а только измеряют изменения. Чтобы правильно выбрать гироскоп для ваших нужд, примите во внимание максимальную угловую скорость изменения (градусы в секунду), которой будет подвергаться ваш продукт. Пульт дистанционного управления, скорее всего, будет вращаться со скоростью менее 1 оборота в секунду (360 градусов в секунду), в то время как ракета, падающая с неба, может вращаться со скоростью 1500 градусов в секунду. При подключении к тому же микроконтроллеру (например, 10 бит) гироскоп на 360 град/с будет иметь точность 360/1024 = 0,35 град/с, тогда как гироскоп на 1500 град/с будет иметь точность 1500/1024 = 1,46. град/с. Поэтому, если вы выбрали гироскоп на 1500 град/с, когда вам нужен был только гироскоп на 360 град/с, вы получите только около 245 показаний, а не 1024.
Пульт дистанционного управления, скорее всего, будет вращаться со скоростью менее 1 оборота в секунду (360 градусов в секунду), в то время как ракета, падающая с неба, может вращаться со скоростью 1500 градусов в секунду. При подключении к тому же микроконтроллеру (например, 10 бит) гироскоп на 360 град/с будет иметь точность 360/1024 = 0,35 град/с, тогда как гироскоп на 1500 град/с будет иметь точность 1500/1024 = 1,46. град/с. Поэтому, если вы выбрали гироскоп на 1500 град/с, когда вам нужен был только гироскоп на 360 град/с, вы получите только около 245 показаний, а не 1024.
Предоставлено: Википедия
IMU (инерциальный измерительный блок) обычно состоит из акселерометра и гироскопа и используется для измерения ориентации объекта, скорости и т. д. Часто для повышения точности включаются дополнительные датчики (магнитные, температурные). Количество «степеней свободы» указывает на количество различных осей, измеряемых чипом. Например, объединение трехосного акселерометра с двухосевым гироскопом будет рассматриваться как IMU с 3 + 2 = 5 степенями свободы.
Дополнительные соображения
При использовании акселерометров, гироскопов или инерциальных измерительных блоков (IMU) для определения положения в пространстве важно учитывать, что существует несколько дополнительных факторов, влияющих на показания, основным препятствием является частота дискретизации. Микроконтроллерам требуется определенное время для считывания значений, предоставляемых им датчиком, и из-за этого значения между этими показаниями теряются. Существует несколько математических методов (популярным выбором является фильтр Калмана), которые пытаются это компенсировать. Второй источник ошибки заключается в том, что на показания часто влияют колебания температуры. В большинстве спецификаций, связанных с микроэлектромеханическими системами (МЭМС), делается попытка описать, как температура влияет на выходной сигнал.
Хотите узнать больше? Начните с материалов, бесплатно предоставляемых Analog Devices, производителями МЭМС-акселерометров, гироскопов и других датчиков.
Отметить эту публикацию
Спасибо, что помогаете поддерживать цивилизованность нашего сообщества!
Сообщить персоналу лично
Это спам
Это сообщение является рекламой или вандализмом. Это не полезно и не относится к текущей теме.
Вы пометили это как спам. Отменить flag.Flag Post
Начало работы с Arduino и MPU6050. Взаимодействие MPU-6050 с Arduino.
В этом проекте я покажу вам, как работает датчик MPU6050, а также как подключить Arduino к MPU6050. Мы будем соединять коммутационную плату MPU-6050 с Arduino UNO и считывать значения с акселерометра и гироскопа.
[adsense1]
Прежде чем приступить к проекту, вам необходимо понять некоторые основы работы датчика MPU6050. MPU-6050 — это датчик IMU, который содержит акселерометр MEMS (микроэлектромеханическая система) и гироскоп MEMS на одном чипе.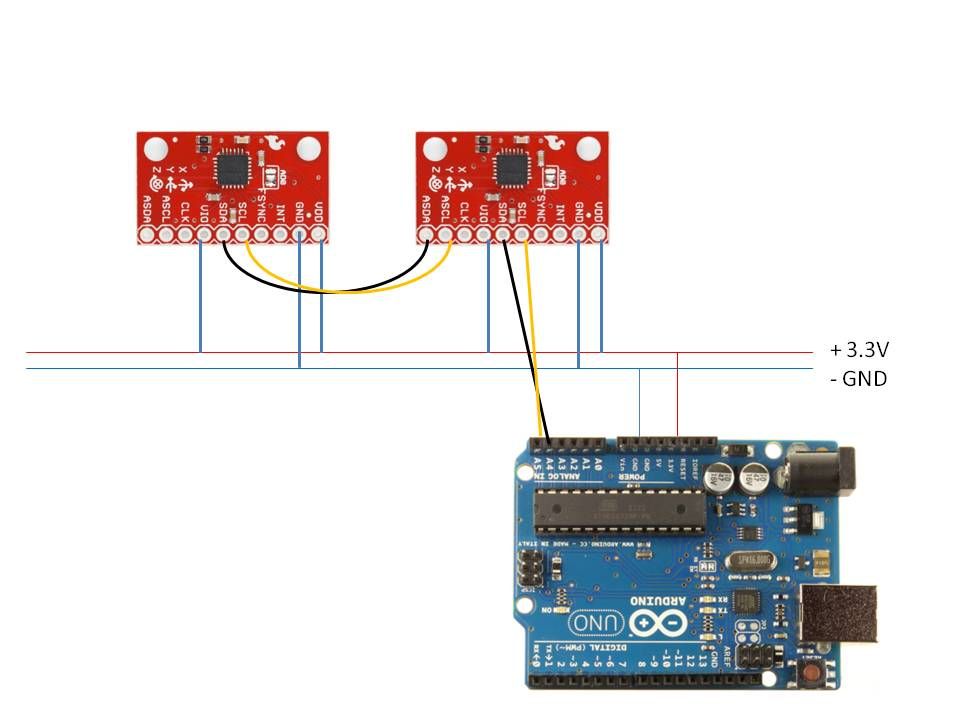
Здесь датчик IMU, где IMU означает инерциальную измерительную единицу, представляет собой устройство, которое измеряет удельную силу с помощью акселерометра, угловую скорость с помощью гироскопа и магнитное поле с помощью магнитометров.
Датчики IMU используются в самобалансирующихся роботах, самолетах, мобильных телефонах, планшетах, космических кораблях, спутниках, дронах, БПЛА (беспилотных летательных аппаратах) и т. д. для наведения, определения положения, определения ориентации, отслеживания движения и управления полетом.
Двумя распространенными IMU являются акселерометр ADXL 335 и MPU-6050. ADXL 335 содержит 3-осевой акселерометр.
В случае MPU-6050 это шестиосевое устройство отслеживания движения, которое сочетает в себе 3-осевой акселерометр и 3-осевой гироскоп на одном чипе. Мы увидим более подробную информацию о MPU6050 в следующем разделе.
Краткое описание
Знакомство с датчиком MPU6050
MPU-6050 — это шестиосевое устройство отслеживания движения, разработанное InvenSense. Ниже перечислены основные характеристики устройства MPU6050.
Ниже перечислены основные характеристики устройства MPU6050.
- Трехосевой акселерометр
- Трехосевой гироскоп
- Датчик температуры с цифровым выходом
- Шесть 16-разрядных АЦП (три для акселерометра и три для гироскопа)
- Встроенный цифровой процессор движения (DMP)
- Буфер FIFO 1024B
Шестиосевой MPU-6050 когда-то назывался устройством с 6 степенями свободы (шесть степеней свободы), поскольку он обеспечивает шесть выходных значений (три от акселерометра и три от гироскопа). MPU-6050 может обмениваться данными по протоколу I2C.
Цифровой процессор движения или DMP — это встроенный процессор, который может снизить вычислительную нагрузку от главного процессора, такого как Arduino, за счет получения и обработки данных от акселерометра, гироскопа и внешнего магнитометра.
[adsense2]
Взаимодействие MPU6050 с Arduino
Как упоминалось ранее, MPU6050 поддерживает только связь I2C и, следовательно, он должен быть подключен только к контактам I2C Arduino. Выводы I2C Arduino мультиплексированы с выводами аналогового ввода A4 и A5, т.е. A4 — это SDA, а A5 — это SCL.
Выводы I2C Arduino мультиплексированы с выводами аналогового ввода A4 и A5, т.е. A4 — это SDA, а A5 — это SCL.
Что касается MPU6050, мы использовали обычную коммутационную плату с восемью контактами. На изображении выше показано схематическое изображение платы MPU6050 Breakout.
Здесь мы будем использовать контакты SCL, SDA и INT для подключения к Arduino.
Необходимые компоненты
Оборудование
- Arduino UNO [Купить здесь]
- Разделительная плата MPU6050
- Соединительные провода
Программное обеспечение
- Arduino IDE
- Обработка (для 3D-визуализации)
Принципиальная схема
На следующем рисунке показана принципиальная схема интерфейса MPU6050 с Arduino UNO. Как упоминалось ранее, интерфейс между MPU6050 и Arduino должен быть реализован с использованием протокола I2C.
Следовательно, вывод SCL платы Arduino (A5) подключен к выводу SCL MPU6050.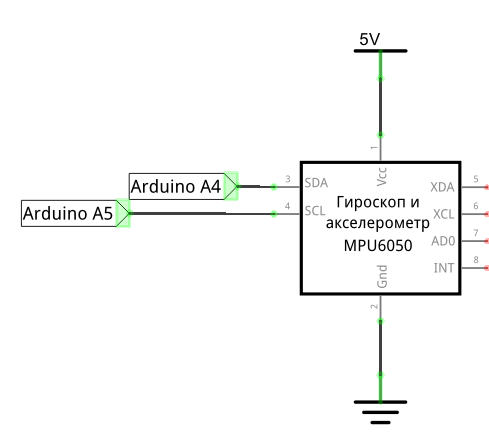 Точно так же вывод SDA платы Arduino (A4) подключается к выводу SDA платы MPU6050.
Точно так же вывод SDA платы Arduino (A4) подключается к выводу SDA платы MPU6050.
Кроме того, мы будем использовать функцию прерывания MPU6050, чтобы указать (или прервать) Arduino, когда 1024-байтовый буфер FIFO заполнен. Итак, подключите контакт INT MPU6050 к контакту внешнего прерывания 0 (INT0) Arduino UNO, т.е. к контакту 2.
ПРИМЕЧАНИЕ: В связи I2C MPU-6050 всегда действует как ведомое устройство.
Чтение необработанных значений с MPU6050
Перед загрузкой фактической программы мы сначала увидим простую программу для считывания необработанных значений с акселерометра, гироскопа и датчика температуры. Просто подключите провода SCL и SDA MPU6050 к соответствующим контактам I2C Arduino (A4 и A5) и загрузите следующий код.
Если вы откроете последовательный терминал, вы получите необработанные значения от акселерометра и гироскопа и откалиброванную температуру от датчика температуры. Данные выглядят примерно так.
Как видите, считывание необработанных значений с датчика MPU6050 несложно, но эти данные и нам необходимо выполнить дополнительные вычисления на основе этих данных, чтобы получить рысканье, тангаж и крен.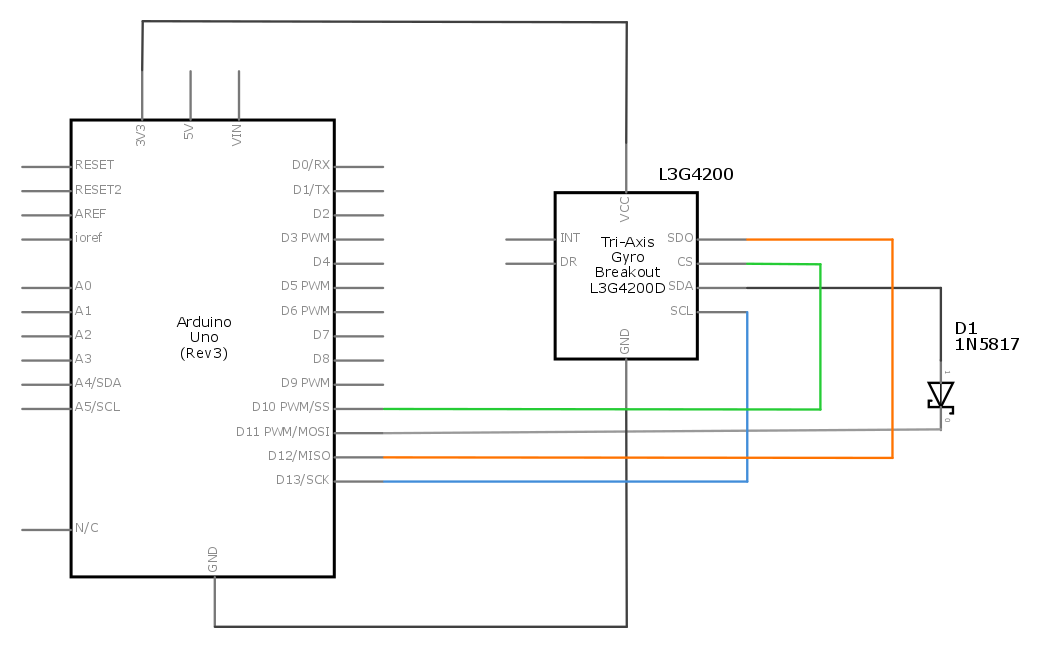
Я уже упоминал, что в датчике MPU6050 есть специальный процессор, называемый DMP или Digital Motion Processor, который встроен в тот же чип, что и акселерометр и гироскоп. Использование этого DMP заключается в том, что его можно запрограммировать с помощью встроенного программного обеспечения для выполнения сложных вычислений на основе данных с датчиков.
Но четкой документации по DMP со стороны InvenSense нет, и в результате мы упускаем возможности делать быстрые расчеты данных датчика непосредственно на чипе.
Джефф Роуберг и другие проделали отличную работу по обратному инжинирингу информации, связанной с DMP, из анализа сигналов I2C.
Загрузка кода в Arduino и тестирование MPU6050
Перед загрузкой кода нам необходимо загрузить две библиотеки для Arduino. Это I2Cdev и MPU6050. Ссылки для скачивания и официальные ссылки GitHub приведены ниже.
I2CDEV: Скачать библиотеку I2CDEV или посетите GitHub LICK
MPU6050: Скачать MPU6050 Библиотека или посетите Github Ссылка
Загрузить библиотеку MPU6050 и извлечь содержимое с помощью загруженного файла.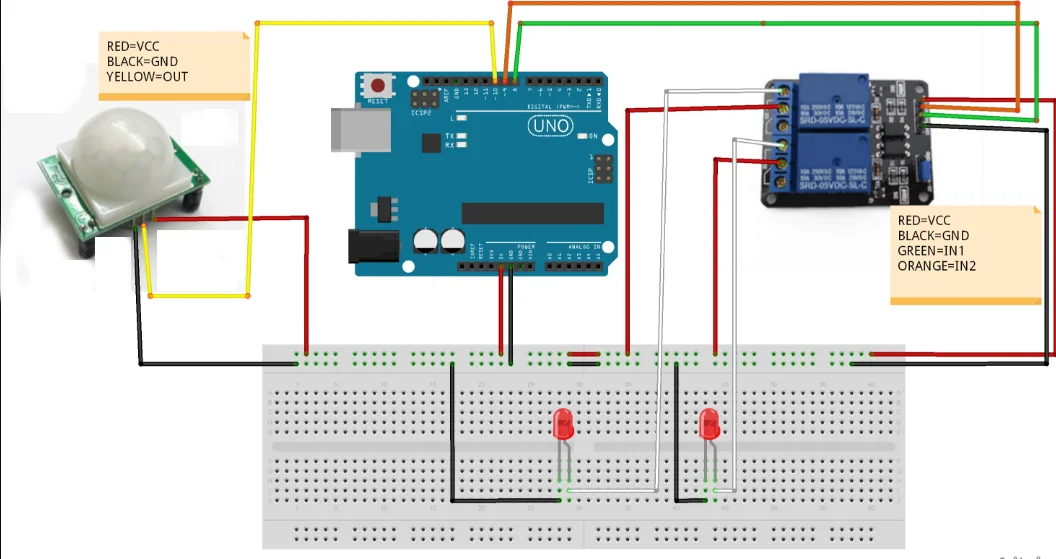 Вы получите папку с именем «MPU6050». Скопируйте эту папку и вставьте ее в папку библиотек Arduino.
Вы получите папку с именем «MPU6050». Скопируйте эту папку и вставьте ее в папку библиотек Arduino.
В моем случае он находится в «C:\Program Files (x86)\Arduino\libraries». Сделайте то же самое для библиотеки I2Cdev.
Если все в порядке, откройте Arduino IDE и перейдите по следующему пути: Файл -> Примеры -> MPU6050 -> Примеры -> MPU6050_DMP6 и откройте код примера MPU6050_DMP6.
Загрузите этот код в Arduino (при условии, что вы уже выполнили соединения в соответствии со схемой) и после загрузки кода откройте последовательный терминал.
Установите скорость передачи в последовательном терминале на 115200, и вы получите следующий текст.
« Инициализация DMP…
Инициализация устройств I2C…
Подключения устройства тестирования…
MPU6050 Успешное
Отправить любой символ для начала DMP Программное обеспечение и Demo:
050. не получают никаких данных или все еще получают мусорные данные, просто перезагрузите Arduino.
 Если вы посмотрите на последнее предложение, там написано «Отправьте любой символ, чтобы начать программирование и демонстрацию DMP». Итак, введите любой символ, например 1 или a, в серийный монитор и отправьте его. Как только вы нажмете Enter, вы сможете увидеть значения Yaw, Pitch и Roll (ypr) на последовательном мониторе.
Если вы посмотрите на последнее предложение, там написано «Отправьте любой символ, чтобы начать программирование и демонстрацию DMP». Итак, введите любой символ, например 1 или a, в серийный монитор и отправьте его. Как только вы нажмете Enter, вы сможете увидеть значения Yaw, Pitch и Roll (ypr) на последовательном мониторе.
ПРИМЕЧАНИЕ: В течение этого времени держите MPU6050 на устойчивой горизонтальной поверхности. Кроме того, подождите 10 секунд, пока значения от MPU6050 не стабилизируются.
3D-моделирование в Processing на основе значений Interfacing Arduino и MPU6050
На следующем этапе проекта мы рассмотрим 3D-моделирование датчика MPU6050 с использованием Processing IDE, где вы можете просмотреть 3D-представление данных из датчик. Processing — это язык программирования и интегрированная среда разработки, разработанные для электронного искусства и визуального дизайна. Фактически, среда разработки Arduino IDE также основана на языке программирования Processing.
Чтобы загрузить Processing IDE, перейдите по этой ССЫЛКЕ . Загрузите и установите Processing IDE по данной ссылке.
После скачивания Processing IDE и его установки (просто разархивируйте содержимое из загруженного zip-файла) вам необходимо скачать библиотеку для Processing под названием «Toxi». Вы можете загрузить библиотеку Toxi по этой ССЫЛКЕ .
Я выбрал файл «toxiclibs-complete-0020». После загрузки этого файла извлеките содержимое в папку с именем «toxiclibs-complete-0020».
Скопируйте эту папку и вставьте ее в папку библиотек Обработки. В моем случае это было «C:\Users\Ravi\Documents\Processing\libraries».
После копирования папки вы готовы к 3D-моделированию. Во-первых, вам нужно загрузить предыдущий код Arduino (MPU6050_DMP6) с небольшими изменениями.
Откройте MPU6050_DMP6 (пример программы, который мы загрузили ранее) в Arduino IDE. Прокрутите вниз до строки, которая говорит следующее.
# определить OUTPUT_READABLE_YAWPITCHROLL
Прокомментируйте эту строку, добавив перед ней двойную косую черту.
//#define OUTPUT_READABLE_YAWPITCHROLL
Также найдите строку с надписью //#define OUTPUT_TEAPOT и раскомментируйте ее, удалив двойную косую черту. Теперь вы можете загрузить код. Что мы изменили в коде, так это то, что вместо отправки данных на последовательный терминал мы перенаправляем их в Processing IDE.
Теперь откройте Processing IDE и нажмите File -> Open. Теперь перейдите в папку, в которой установлена библиотека MPU6050 для Arduino. Откройте пример обработки с именем «MPUTeapot».
В моем случае расположение этого примера — C:\Program Files (x86)\Arduino\libraries\MPU6050\Examples\MPU6050_DMP6\Processing\MPUTeapot.
В этой программе предусмотрен автоматический выбор номера ПОРТА, к которому подключен Arduino. Строка в коде, связанная с этим:
String portName = Serial.list()[0];
Другой способ указать номер ПОРТА Arduino — вручную ввести номер COM-порта. Для этого закомментируйте строку выше и раскомментируйте следующую строку и замените номер COM-порта соответствующим номером COM-порта, к которому подключен Arduino.