Как устроен сервопривод и из каких элементов он состоит. Каковы основные характеристики сервоприводов. Как подключить и управлять сервоприводом с помощью Arduino. Какие бывают типы сервоприводов и в чем их отличия. Как выбрать подходящий сервопривод для проекта.
Что такое сервопривод и как он устроен
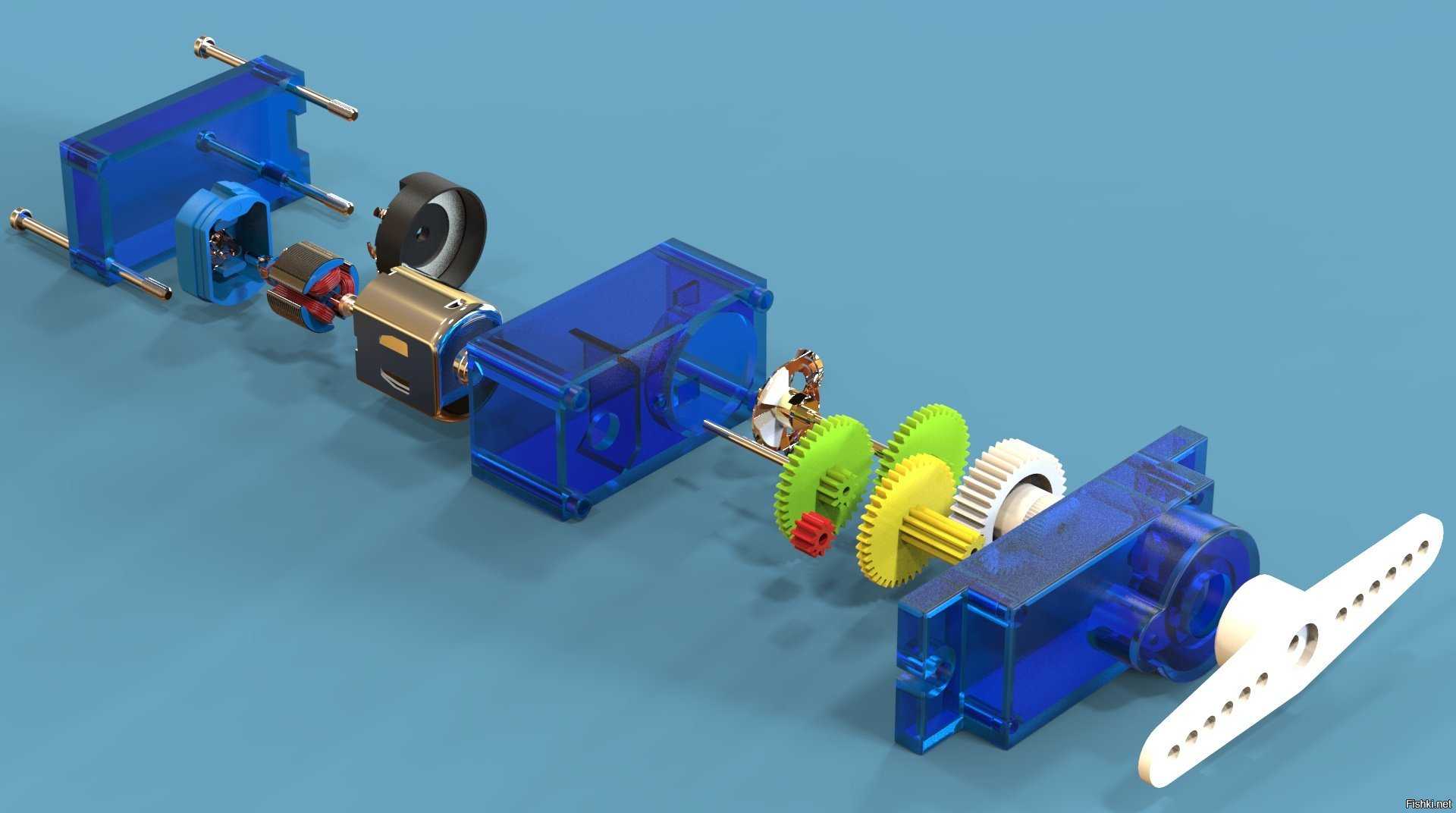
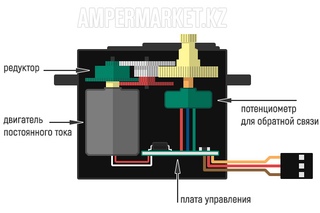
Сервопривод — это устройство, состоящее из электромотора, редуктора, датчика положения и схемы управления, которое способно точно поворачиваться на заданный угол и удерживать требуемое положение. Основные элементы сервопривода:
- Электромотор — преобразует электричество в механическое вращение
- Редуктор — снижает скорость вращения и увеличивает крутящий момент
- Датчик положения (позиционер) — определяет текущий угол поворота вала
- Плата управления — обрабатывает сигналы и управляет мотором
- Выходной вал — передает вращение на внешнее устройство
- Шлейф с проводами питания и управления
Благодаря такой конструкции сервопривод способен точно поворачиваться на заданный угол и удерживать его, что делает его незаменимым в робототехнике, моделизме и других областях.
Основные характеристики сервоприводов
При выборе сервопривода следует обратить внимание на следующие ключевые параметры:
Крутящий момент
Показывает, какой груз сервопривод способен удержать на определенном плече рычага. Измеряется в кг×см. Например, момент 5 кг×см означает, что сервопривод удержит груз 5 кг на рычаге длиной 1 см.
Скорость поворота
Измеряется как время поворота на 60°. Например, характеристика 0.1 с/60° говорит о том, что сервопривод поворачивается на 60° за 0.1 секунды.
Размер (форм-фактор)
Сервоприводы делятся на несколько стандартных размеров:
- Микро: 8-25 г, размеры около 22×15×25 мм
- Стандартный: 40-80 г, размеры около 40×20×37 мм
- Большой: 50-90 г, размеры около 49×25×40 мм
Типы сервоприводов и их отличия
Сервоприводы различаются по нескольким параметрам:
По типу управления
- Аналоговые — используют аналоговую схему управления
- Цифровые — имеют встроенный микропроцессор для управления
Цифровые сервоприводы обеспечивают более точное позиционирование и быстрый отклик, но потребляют больше энергии.
По материалу шестерен
- Пластиковые — легкие, недорогие, подходят для небольших нагрузок
- Карбоновые — прочные и долговечные, но дорогие
- Металлические — выдерживают максимальные нагрузки, но тяжелые и быстро изнашиваются
По типу мотора
- С коллекторным мотором — более простые и дешевые
- С бесколлекторным мотором — более эффективные и долговечные
Как подключить и управлять сервоприводом с Arduino
Подключение сервопривода к Arduino выполняется по трем проводам:
- Красный — питание 5В
- Черный — земля
- Желтый/белый — сигнальный провод (подключается к цифровому пину)
Для управления используется библиотека Servo. Пример простого скетча:
«`cpp #includeЭтот код будет поворачивать сервопривод на 0, 90 и 180 градусов с паузой в 1 секунду между поворотами.
Особенности работы с сервоприводами
При работе с сервоприводами следует учитывать некоторые нюансы:
Питание сервоприводов
Мощные сервоприводы могут потреблять ток более 100 мА. Arduino способна выдать до 500 мА, поэтому при использовании нескольких сервоприводов или мощных моделей рекомендуется использовать отдельный источник питания.
Ограничения по количеству сервоприводов
Стандартная библиотека Servo позволяет управлять не более чем 12 сервоприводами на большинстве плат Arduino (на Mega — до 48). При этом использование библиотеки блокирует работу ШИМ на пинах 9 и 10.Калибровка сервоприводов
Разные модели сервоприводов могут иметь небольшие отличия в диапазоне управляющих импульсов. Для точной работы рекомендуется экспериментально подобрать правильный диапазон для конкретного сервопривода.
Сервоприводы постоянного вращения
Помимо стандартных сервоприводов с ограниченным углом поворота существуют модели с возможностью непрерывного вращения. Их особенности:
- Могут вращаться на 360 градусов без остановки
- Управляющий сигнал задает не угол, а скорость и направление вращения
- Подходят для создания колесных роботов
Пример управления сервоприводом постоянного вращения:
 «`cpp
#include
«`cpp
#include Выбор сервопривода для проекта
- Требуемый крутящий момент
- Необходимая скорость поворота
- Точность позиционирования
- Размер и вес
- Напряжение питания
- Цена
Важно помнить, что не всегда нужен самый мощный и дорогой сервопривод. Главное — чтобы его характеристики соответствовали требованиям проекта.
Заключение
Сервоприводы — мощный и гибкий инструмент для создания подвижных механизмов в робототехнике и других областях. Понимание принципов их работы и особенностей управления позволяет эффективно использовать их возможности в различных проектах. При правильном выборе и подключении сервоприводы обеспечивают точное и надежное позиционирование, что делает их незаменимыми во многих приложениях.

подключение, управление, примеры работы [Амперка / Вики]
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.
Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.
Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал
Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками. Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода.
Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера.
Жёлтый — управляющий сигнал. Подключите к цифровому пину микроконтроллера.
Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат:
Для простых сервоприводов: значение угла поворота.
Для сервоприводов постоянного вращения: значения скорости и направления вращения.
Плата управления сравнивает это значение с показанием на датчике обратной связи.
На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Интерфейс управления
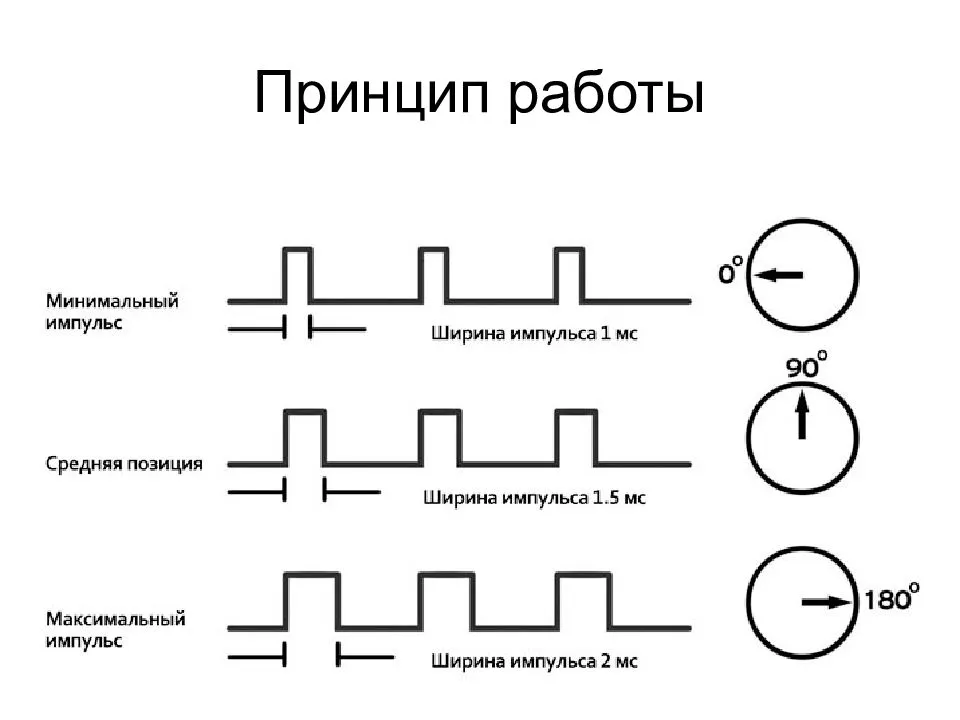
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче.

Если длины импульсов равны, электромотор останавливается.
Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.
544 мкс — для 0°
2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.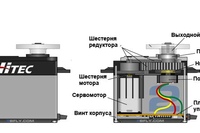
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
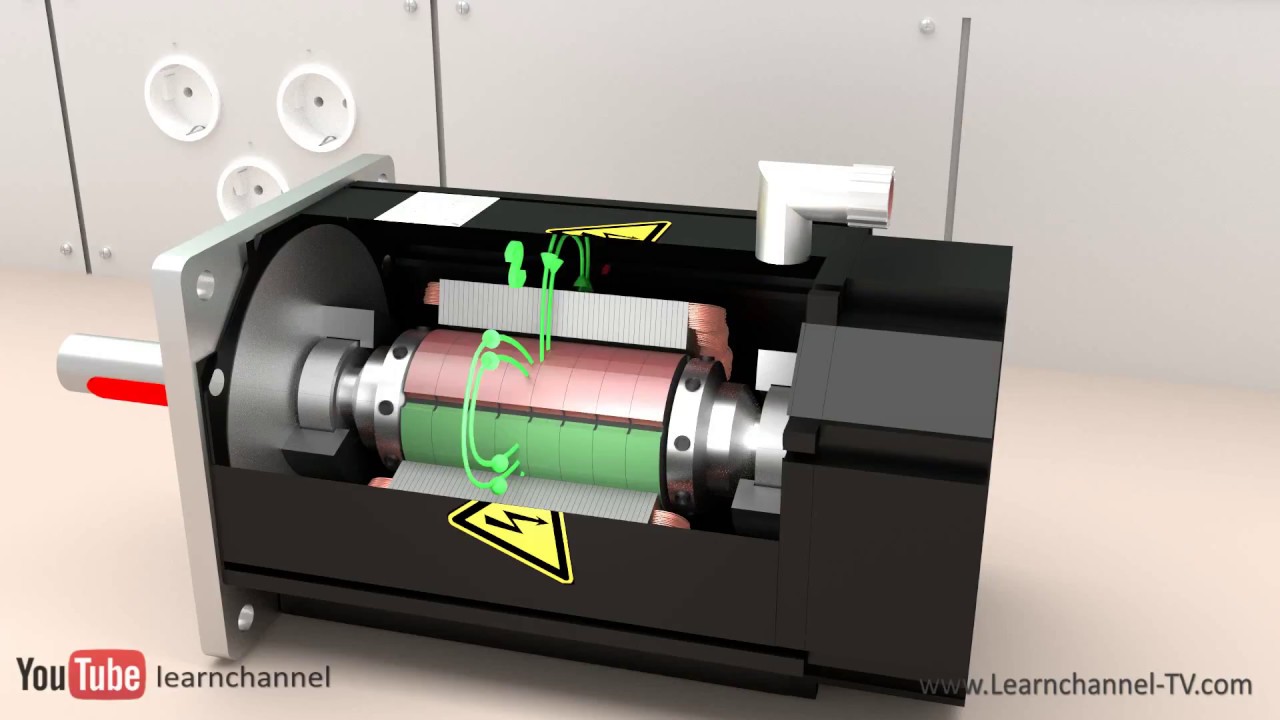
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
- servo_example.
 ino
ino // подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2.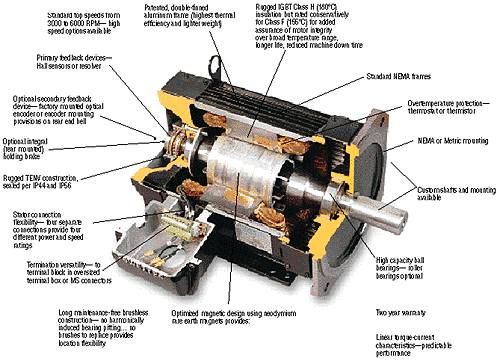 write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.
 h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Ресурсы
Сервоприводы: подключение, управление, примеры работы
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.
Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.
Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал
Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками.
Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода.
Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера.
Жёлтый — управляющий сигнал. Подключите к цифровому пину микроконтроллера.
Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат:
Для простых сервоприводов: значение угла поворота.

Для сервоприводов постоянного вращения: значения скорости и направления вращения.
Плата управления сравнивает это значение с показанием на датчике обратной связи.
На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче.
.gif)
Если длины импульсов равны, электромотор останавливается.
Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.
544 мкс — для 0°
2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
- servo_example.
 ino
ino // подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2. write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.
 h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Ресурсы
Принцип работы сервопривода, что такое сервопривод
Сервопривод – это привод, предназначенный для осуществления контроля (угол поворота вала, скорость вращения/движения и так далее) над различными объектами, находящимися в постоянном движении. Контроль производится в зависимости от заданных ему параметров извне.
Контроль производится в зависимости от заданных ему параметров извне.
Рисунок 1. Сервопривод
Данный механизм получил достаточно широкое применение в различных промышленных сферах. Например, чаще всего его можно увидеть в конструкциях станков/машин для создания таких материалов/предметов и их обработки как:
- Упаковки и бумага;
- Листовой металл;
- Обработка материалов;
- Транспортное оборудование;
- Стройматериалы.
Также они могут использоваться в управляющих элементах механических систем (заслонка/задвижка, багажник автомобиля и тому подобные механизмы). Сервопривод очень полезен, так как позволяет поддерживать необходимый вам параметр.
Устройство
Рисунок 2. Устройство сервопривода
Сервопривод включает в свой состав такие элементы как:
- Приводной механизм – к примеру, это может быть электромотор.
 Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент; - Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
- Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
- Блок питания – питает данный механизм.
Интересно, что самый простой управляющий блок чаще всего создаётся с использованием схемы сравнений значений на датчике и необходимых значений при подаче напряжения определённой полярности на привод.
Виды
Сервоприводы могут быть произведены в самых различных комплектациях. Эти устройства разделяют по принципу движения:
Вращательное
Представлено двумя вариациями: синхронной и асинхронной. Синхронный вариант помогает задать высокоточные параметры скорости вращения, углов поворота и ускорения. По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
По сравнению с асинхронным скорость набирают быстрее, поэтому и стоят больше;
Асинхронный привод отличается способностью поддержания с большой точностью необходимой скорости даже в условиях низких оборотов.
Линейное
Также делится на два варианта: плоские и круглые. Двигатели данного типа развивают достаточно высокое ускорение (70 метров в секунду).
Ещё их выделяют по способу действия:
- Электромеханические механизмы – формирование движений происходит за счёт электродвигателя с редуктором;
- Электрогидромеханические – у них любое движение создаётся с участием системы поршня-цилиндра. В сравнении с электромеханическим приводом они обладают отличительно высоким быстродействием.
Параметры
Абсолютно любой сервопривод классифицируется по следующим параметрам:
Поворотная скорость представляет собой конкретный временной промежуток, необходимый для изменения позиции вала и зависима от определённого напряжения.
Поворотный угол выходного вала. Обычно этот параметр равен 180, 360.
Крутящий момент является самым важным параметром работы механизма и регулируется в зависимости от напряжения.
Управление сервопривода зависит от его типа – цифровой он или аналоговый.
Питание. Чаще всего в моделях используют напряжение, варьирующееся от 4.8 до 7.2 вольт.
Материал. Для изготовления редуктора могут использовать различные материалы. Для шестерней используют металл, карбон, пластик. Металл отличается большой устойчивостью в условиях динамических нагрузок, но не долговечен. Пластик долговечен, но не устойчив в динамических нагрузках.
Размер. По этому параметру приводы делят на микро-, стандартные и большие (существуют и другие размеры, но эти самые распространенные).
Принцип работы сервопривода
Рисунок 3. Принцип работы сервопривода
Принцип работы сервопривода
Движение редукторного выходного вала, который связан сервоприводом с шестернями, происходит за счёт работы электродвигателя. Для регулирования оборотов предназначен редуктор. Для управления необходимыми механизмами вал соединяется непосредственно с ними.
Его положение контролирует специальный датчик (на них основано всё устройство), который преобразует угол поворота в электро-сигналы. Такой датчик носит название энкодера. Во время поворота бегунка сопротивление энкодера изменяется. Это изменение пропорционально зависимо от угла поворота датчика. Благодаря этому принципу работы механизм можно зафиксировать в нужной позиции.
Для поддержания отрицательной обратной связи используется электронная плата, которая обрабатывает сигналы, приходящие от энкодера. Она сравнивает параметры и определяет запускать или остановить электродвигатель.
Управление
Для того чтобы серводвигатель мог функционировать в нём используют специальную систему, основанную на G-кодах. Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Упомянутые коды представлены набором управляющих команд, которые заложены в программе.
Например, в системе ЧПУ сервопривод контактирует с инверторами, способными изменять напряжение, которое соответствует входному, в обмотке электромотора.
Вся система серводвигателя управляется/контролируется блоком управления, из которого поступают различные команды, например, передвижения по оси Х или У. После подачи команды в инверторе создаётся определённое напряжение, питающее привод. Затем серводвигатель начинает своё круговое движение, связанное с главным исполнительным элементом механизма и энкодером.
Энкодер создаёт множество импульсов, которые подсчитываются блоком, осуществляемыми управление устройством. Для каждой позиции исполнительного элемента в программе установлено определённое количество импульсов. Так под их влиянием либо подаётся напряжение на моторчик, либо прекращается.
Преимущества и недостатки
Приятной особенностью сервоприводов является их достаточно малый размер и вес, что позволяет устанавливать их в различные конструкции с лёгкостью. Также они отличаются своей почти полностью бесшумной работой, что очень важно при использовании данных устройств на определённых участках. Любой сервопривод можно настроить персонально под свои конкретные задачи.
Также они отличаются своей почти полностью бесшумной работой, что очень важно при использовании данных устройств на определённых участках. Любой сервопривод можно настроить персонально под свои конкретные задачи.
Благодаря сервоприводу можно осуществлять управление с отличительной большой точностью и стабильностью.
Из недостатков выделяется только сложность в их настройке и стоимости.
Подключение
Рисунок 4. Подключение сервопривода к системе Arduino
Подключение сервопривода осуществляется за счёт проводников в количестве трёх штук. Два проводника используются для подачи питания на электромотор, а оставшийся необходим для передачи сигналов от блока управления, которые приводят вал в нужную позицию.
Стоит отметить, что для того чтобы снизить вероятность огромных динамических нагрузок, которым может подвергаться электромотор, необходимо осуществлять как плавный разгон мотора, так и его торможение. Для этой цели создаются и используются более высокие по сложности микроконтроллеры, которые обеспечивают высокую точность в контроле и управлении положением рабочей детали.
Для этой цели создаются и используются более высокие по сложности микроконтроллеры, которые обеспечивают высокую точность в контроле и управлении положением рабочей детали.
Шаговый сервопривод
Понравилась статья? Расскажите друзьям: Оцените статью, для нас это очень важно:Проголосовавших: 6 чел.
Средний рейтинг: 4.3 из 5.
Как устроен сервопривод и принцип его работы описаны в блоге Planeta Hobby
Третий компонент аппаратуры управления – сервомашинка. В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
Определение сервопривода
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Опишем более простым языком, как работает сервопривод:
- Сервопривод получает импульсный сигнал – управляющее значение, которое определяет угол поворота качалки сервы,
- Блок управления начинает сравнение поступившего параметра со значением на своем датчике,
- В зависимости от результата сравнения БУ возвращает сигнал, который предопределяет, какое действие необходимо выполнить: повернуть, ускориться или замедлиться, чтобы сравниваемые показатели стали одинаковыми.

Устройство сервопривода
Большинство современных рулевых машинок построены по одному принципу и состоят из таких составных частей: выходной вал, шестерни редуктора, двигатель постоянного тока, потенциометр, печатная плата и управляющая электроника.
Редуктор вместе с мотором образуют привод. Чтобы трансформировать поступающее напряжение в механический поворот, нужен электродвигатель. Редуктор же – конструкция из шестеренок – преобразует крутящий момент и служит для понижения скорости вращения двигателя, так как часто она настолько большая, что совсем не годится для практического применения.
Вместе с включением и выключением электродвигателя вращается и выходной вал, к которому закрепляется качалка – ее, в свою очередь, крепят к рулю модели. Именно качалка будет задавать движение нашей модели, а для этого в устройстве сервопривода предусмотрен потенциометр – датчик, способный превратить угол поворота обратно в электро-сигнал.
Однако, одним из главных элементов является плата управления, которая представляет собой электронную схему. Именно она получает электрический импульс, анализирует полученный сигнал с данными потенциометра и включает/выключает электродвигатель. Вот как устроен сервопривод и работа его элементов.
Кстати, в качестве мотора в устройстве сервопривода могут использоваться коллекторные, коллекторные Coreless и бесколлекторные двигатели.
Управление сервоприводом. Принцип работы.
Сервопривод получает импульсные сигналы, которые проходят по специальному проводу от приемника. Частота таких сигналов составляет 20мс, а их продолжительность может варьироваться в пределах 0,8-2,2мс. Чтобы у вас появилось четкое представление, как все-таки сигнал трансформируется в перемещение качалки, нужно проанализировать стандартную схему сервы.
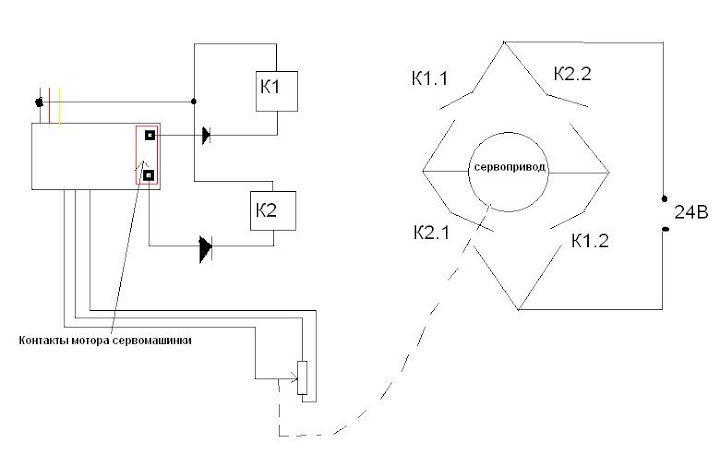
где, ГОП – генератор опонного импульса (к нему подсоединен потенциометр), К – компататор, УВХ – устройство выборки-хранения, М – электрический мотор, который охватывается диагональю силового моста.
Теперь разберём более подробно, как работает сервопривод. Итак, импульсный сигнал поступает от ресивера на компататор и в то же время активирует ГОП. Продолжительность опорного импульса связано с положением потенциометра, который соединен с выходным валом физически. Когда качалка находится в средней позиции, длина сигнала составляет 1,5мс, если же положение крайнее – 0,8 или 2,2 мс. Управляющий сигнал и опорный импульс анализируются компататором, который рассчитывает их разностную величину (рассчет ведется по длительности импульсов). Именно длина разностного импульса и определяет насколько «ожидаемое» и «фактическое» состояние руля совпадает. Полученный показатель сохраняется в качестве потенциала в УВХ. Сложно?
Принцип работы сервопривода в разных условиях
Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
Пилот меняет положения стика, тем самым увеличивая управляющий импульс. На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т.е. качалка удерживается в одном положении.
Мы разобрали работу сервопривода в упрощенном варианте. На самом деле существует множество нюансов по настройке и использования девайса, зная которые можно избежать поломок и неприятных ситуаций.
Теперь, зная, как устроен сервопривод, принцип его работы, можно отправляться и выбирать девайс для своей модели. Для этого вам нужно перейти в правильный раздел сайта «Planeta Hobby». Если же у вы не знаете, как правильно подобрать серву для своего самолета или авто, обращайтесь за советом нашего консультанта или читайте эту полезную статью.
что это такое, принцип работы, виды, для чего используется
Сервоприводы промышленного назначения оснащены специальными считывающими устройствами (датчиками), которые могут отслеживать те или иные параметры работы мотора. При этом качественный промышленный сервопривод должен сигнализировать оператору об изменениях в режиме работы. В идеале – еще и сам изменять режим своей работы в зависимости от поступившего на датчик сигнала.
Несомненными преимуществами современного промышленного сервопривода можно считать:
- низкий уровень шума работы;
- способность подбирать разрешающие параметры в соответствии с поставленными перед ним задачами;
- высокую точность и плавность изменения режимов работы на любой скорости;
- длительные сроки эксплуатации даже под самыми высокими нагрузками.
Однако имеется у данных устройств и минус – достаточно высокая сложность в конфигурировании системы.
Как работает
Промышленные сервоприводы должны увеличивать мощности при поступлении энергии извне, отличающейся от той, что требуется механизму. Это касается как постоянно уменьшенной энергии, так и ее нестабильности (подача с перепадами).
Важной конструктивной особенностью механизма является специальный замкнутый контур, который и применяется для осуществления управления приводом. Здесь реализован принцип возвращения сигнала с подконтрольных элементов системы. При этом обратные сигналы поступают с детектирующих устройств на систему управления. Та, в свою очередь, проводит их оценку, сравнение с теми параметрами, что были заданы конструкторами, а затем приводит в норму необходимые параметры работы.
Как правило, сервоприводы оснащены тремя проводниками:
- сигнальный провод – по нему и передаются управляющие импульсы;
- питающий провод;
- провод-заземлитель.
Разновидности сервоприводов промышленного назначения
Сегодня выпускается немало разновидностей сервоприводов. Их классификация будет зависеть, в первую очередь, от конструктивных особенностей.
Их классификация будет зависеть, в первую очередь, от конструктивных особенностей.
Обычно сервоприводы делят на синхронные и асинхронные. Каждый из них имеет свои особенности:
- сервоприводы синхронного типа позволяют с повышенной точностью устанавливать параметры углов поворота, числа оборотов и т.д. Они разгоняются быстрее асинхронных аналогов, но при этом более сложны в конструктивном плане и имеют более высокую стоимость;
- сервоприводы асинхронного типа, оборудованные датчиками скорости, позволяют задавать скорость вращения при любых оборотах вала.
Иногда можно встретить и другие основания для классификации данных устройств.
Где используется
Сервопривод используется в области производства и управления, где требуется обеспечить высокую точность позиционирования приводимых элементов в автоматизированных системах и стабильность их функционирования.
Например, устанавливают сервоприводы в:
- управляющих элементах механических систем;
- рабочих органах станков, в том числе, с числовым программным управлением;
- узлах современных роботов;
- промышленных швейных машинах;
- упаковочном оборудовании;
- подъемниках и транспортерах;
- функциональных опытных моделях.

Критерии выбора
Чтобы подобрать нужный сервопривод промышленного назначения, следует уделять внимание массе самых разных параметров:
- широта диапазонов регулирования;
- наличие функции стабилизации скоростей;
- стабилизация моментов вращения;
- способность переносить определенные перегрузки.
Правильно подобранные сервоприводы могут обеспечить высокую точность работы и оперативность управления режимами. Это необходимо в самых разных производственных сферах – на промышленных станках, подъемниках и т.д.
что это такое? Устройство, установка и принцип работы сервопривода
Многие задают вопрос: сервопривод — что это такое? Классическая конструкция сервопривода включает в себя двигатель, датчик позиционирования и трехконтурную управляющую систему (регуляция позиции, скорости и тока).
Слово «серво» имеет латинское происхождение «servus», дословно переводится как «раб», «помощник», «прислужник».
В машиностроительной отрасли устройства выступали в роли вспомогательных компонентов (привод подачи в станке, роботе и т.д.). Однако сегодня ситуация поменялась, и главное назначение сервопривода заключено в реализации в области сервомеханизмов.
Установка сервопривода оправдана в том случае, когда обычные преобразователи частоты регулируют точность работы в недостаточной мере.
Применение приборов высокого качества необходимо в оборудовании, отличающемся высоким уровнем производительности.
В этой статье будет рассказано про сервопривод, что это такое и как он функционирует.
Области использования устройства
В современном мире, когда автоматизация заняла прочные позиции во всех областях машиностроения, конструкция всех механизмов заметно унифицировалась. При этом применяются современные индивидуальные приводы.
Для того, чтобы понять, сервопривод, что это такое, следует знать сферу применения устройства.
Устройства содержат прецизионные конструкции поддержания скорости в промышленных роботах и станках с высокой точностью. Они монтируются на сверлильных оборудованиях, в различных системах транспорта и механизмах вспомогательного характера.
Они монтируются на сверлильных оборудованиях, в различных системах транспорта и механизмах вспомогательного характера.
Самое широкое применение приборы нашли в следующих сферах:
- изготовление бумаги и упаковок;
- изготовление листов из металла;
- обрабатывание материалов;
- производство транспортного оборудования;
- деревообрабатывающая промышленность;
- изготовление стройматериалов.
Сервоприводы на багажник автомобиля
Существует множество моделей сервоприводов для багажника машины от разных производителей. Рассмотрим функциональность такого устройства, как сервопривод багажника от отечественного производителя «Автозебра». Устройство рассчитано на российские автомобили, но не только. К примеру, оно может использоваться в автомобиле «Рено Логан».
По отзывам пользователей, эта конструкция отличается удобством. Она позволяет, не выходя из авто, осуществлять открывание и закрывание багажника.
Управление устройством осуществляет посредством кнопки, вмонтированной в салон автомобиля или же в брелок сигнализации.
Причина широкого использования прибора
Причиной частого применения сервоприводов стали:
- возможность получения управления, отличающегося высокой точностью и стабильным функционированием;
- широкий диапазон контроля скорости;
- высокий уровень устойчивости к помехам;
- маленький размер и вес устройства.
Принцип функционирования сервопривода
Как же работает устройство? Сервопривод, принцип работы которого основан на обратной связи с одним или более системными сигналами, регулирует объект. Выходной показатель устройства поступает на вход, где идет сравнение с задающим действием.
Особенности механизма
Устройство сервопривода обладает двумя основными особенностями:
- способностью повышать мощность;
- обеспечением обратной информационной связи.
Усиление требуется с той целью, что нужная на выходе энергия очень высока (поступает из внешнего источника), а на входе ее показатель незначителен.
Обратная связь — это не что иное, как контур с замкнутой схемой, в котором сигналы не согласованы на входе и выходе. Этот процесс применяется для управления.
Отсюда вытекает вывод: контур при прямом направлении служит передатчиком энергии, а при обратном направлении — передатчиком информации, которая нужна для точности управления.
Питание и цоколевка разъемов устройства
Сервопривод, принцип работы которого применим в радиоуправляемых конфигурациях, обычно обладает тремя проводами:
- Сигнализирующим. По нему осуществляется передача управляющего импульса. Как правило, провод окрашен в белый, желтый или же красный цвет.
- Питающим. Показатель его мощности составляет от 4,8 до 6 В. Зачастую, это красный провод.
- Заземляющим. Провод черный или коричневый.
Размеры приводов
По размерам агрегаты подразделяются на три категории:
- микроприводы;
- стандартные модификации;
- крупные устройства.
Встречаются сервоприводы и с другими показателями размеров, однако вышеперечисленные виды составляют 95% от всех устройств.
Основные характеристик изделия
Работа сервопривода характеризуется двумя основными показателями: скоростью поворота и усилия на валу. Первая величина служит показателем времени, которое измеряется в секундах. Усилие мерится в кг/см, то есть, какой уровень усилия развивает механизм от центра вращения.
Вообще данный параметр находится в зависимости от основного назначения устройства, а уже потом от числа передач редуктора и используемых в устройстве узлов.
Как уже упоминалось, сейчас выпускают механизмы, функционирующие при показателе напряжения питания от 4,8 до 6 В. Чаще этот показатель равен 6 В. Однако не все модели рассчитаны на широкий диапазон напряжений. Иногда двигатель сервопривода работает лишь при 4,8 В или же только при 6 В (последние конфигурации производятся крайне редко).
Аналоговые и цифровые модификации
Несколько лет тому назад все сервосхемы были аналоговыми. Сейчас появились и цифровые конструкции. В чем же разница их работы? Давайте обратимся к информации официального характера.
Из отчета фирмы Futaba следует, что за последнее десятилетие сервоприводы стали отличаться более хорошими техническими показателями, чем раньше, а также малыми размерами, высоким уровнем скорости вращения и показателем элементов кручения.
Последний виток развития — появление устройства на цифровой основе. Эти агрегаты обладают существенными преимуществами даже перед моторами коллекторного типа. Хотя имеются и некоторые минусы.
Внешне аналоговые и цифровые устройства неразличимы. Отличия фиксируются лишь на платах устройств. Вместо микросхемы на цифровом агрегате можно увидеть микропроцессор, анализирующий сигнал приемника. Он и управляет двигателем.
Совершенно неправильно говорить о том, что аналоговая и цифровая модификация в корне различаются при функционировании. Они могут обладать одинаковыми двигателями, механизмами и потенциометрами (переменными резисторами).
Основным отличием является способ переработки поступающего сигнала приемника и управление двигателем. В оба сервопривода поступает одинаковый по мощности сигнал радиоприемника.
Таким образом, становится понятно, сервопривод, что это такое?
Принцип работы аналоговой модификации
В аналоговой модификации полученный сигнал сравним с текущим положением сервомотора, а затем на двигатель поступает сигнал усилителя, вызывающий перемещение двигателя в заданную позицию Показатель частоты процесса составляет 50 раз за одну секунду. Это минимальный показатель времени реагирования. Если же вы отклоните ручку на передатчике, то на сервопривод начнут поступать короткие импульсы, промежуток между которыми станет равняться 20 м/сек. Между импульсами на мотор ничего не поступает, и воздействие извне может изменить функционирование устройства в любую сторону. Этот временной промежуток называется «мертвая зона».
Принцип работы цифровой конструкции
Цифровыми устройствами используется специальный процессор, функционирующий на высоких частотах. Он обрабатывает сигнал приемника и посылает импульсы управления в двигатель с показателем частоты в 300 раз в секунду. Так как показатель частоты значительно выше, то и реакция заметно быстрее и держит позицию лучше. Это вызывает оптимальное центрирование и высокий уровень кручения. Но такой метод требует больших затрат энергии, поэтому батарея, используемая в аналоговом механизме, в этой конструкции будет разряжаться намного быстрее.
Однако все пользователи, которые хоть однажды столкнулись с цифровой моделью, говорят о том, что ее различие с аналоговой конструкцией настолько значительно, что они никогда бы больше не употребляли последнюю.
Заключение
Вашим выбором станут цифровые аналоги, если вам требуются:
- высокий уровень разрешающей способности;
- минимальное количество «мертвых зон»;
- точный уровень позиционирования;
- быстрая реакция на команду;
- беспеременное усилие на валу при повороте;
- высокий уровень мощности.
Теперь вы знаете, что такое сервопривод и как его использовать.
Работа серводвигателей| Как работают серводвигатели
Как работают серводвигатели
Этот маленький мотор отличается высоким КПД и мощностью
Серводвигатели существуют уже давно и используются во многих приложениях. Они небольшие по размеру, но обладают большой мощностью и очень энергоэффективны. Эти особенности позволяют использовать их для управления игрушечными машинками, роботами и самолетами с дистанционным или радиоуправлением. Серводвигатели также используются в промышленных приложениях, робототехнике, поточном производстве, фармацевтике и пищевой промышленности.Но как работают маленькие ребята? Сервосистема встроена прямо в моторный блок и имеет позиционируемый вал, который обычно оснащен шестеренкой (как показано ниже). Двигатель управляется электрическим сигналом, который определяет величину перемещения вала.
Что внутри сервопривода?
Чтобы полностью понять, как работает сервопривод, вам нужно заглянуть под капот. Внутри находится довольно простая установка: небольшой двигатель постоянного тока, потенциометр и схема управления.Двигатель прикреплен шестернями к колесу управления. Когда двигатель вращается, сопротивление потенциометра изменяется, поэтому схема управления может точно регулировать, насколько велико движение и в каком направлении. Когда вал двигателя находится в желаемом положении, подача питания на двигатель прекращается. Если нет, двигатель поворачивают в соответствующем направлении. Желаемое положение передается посредством электрических импульсов по сигнальному проводу. Скорость двигателя пропорциональна разнице между его фактическим положением и желаемым положением.Таким образом, если двигатель находится рядом с желаемым положением, он будет вращаться медленно, иначе он будет вращаться быстро. Это называется пропорциональным управлением . Это означает, что двигатель будет работать ровно настолько, насколько это необходимо для выполнения поставленной задачи, очень эффективный маленький парень.
Как сервопривод управляется?
Внутренности серводвигателя (L) и сервопривода в сборе (R) Сервомашинкиуправляются путем отправки электрического импульса переменной ширины или широтно-импульсной модуляции (ШИМ) через провод управления.Есть минимальный импульс, максимальный пульс и частота повторения. Серводвигатель обычно может поворачиваться только на 90 ° в любом направлении, всего на 180 °. Нейтральное положение двигателя определяется как положение, в котором сервопривод имеет одинаковую величину потенциального вращения как по часовой стрелке, так и против часовой стрелки. ШИМ, отправленный на двигатель, определяет положение вала и на основе длительности импульса, отправляемого через провод управления; ротор повернется в нужное положение. Серводвигатель ожидает увидеть импульс каждые 20 миллисекунд (мс), и длина импульса будет определять, насколько далеко двигатель вращается.Например, импульс 1,5 мс заставит двигатель повернуться в положение 90 °. Менее 1,5 мс перемещает его против часовой стрелки в положение 0 °, а время более 1,5 мс поворачивает сервопривод по часовой стрелке к положению 180 °. Положение сервопривода с регулируемой шириной импульса
Когда эти сервоприводы получают команду двигаться, они перемещаются в позицию и удерживают ее. Если внешняя сила давит на сервопривод, когда сервопривод удерживает позицию, сервопривод будет сопротивляться выходу из этого положения.Максимальное усилие, которое может проявить сервопривод, называется номинальным крутящим моментом сервопривода .
Часто задаваемые вопросы о сервоприводах
Что такое сервопривод?
Как управлять сервоприводом?
В отличие от щеточных двигателей постоянного тока, сервоприводы не могут работать, просто подавая напряжение. Помимо подачи напряжения питания (по красному проводу) для двигателя, по сигнальному проводу (обычно желтому или белому) должен быть послан специальный сигнал, называемый ШИМ-сигналом.Этот сигнал может поступать из различных источников, таких как сервоконтроллеры, RC-приемники или Arduinos.
Сервоприводы
управляются посылкой им импульсов переменной ширины. Контрольный провод используется для отправки этого импульса. Параметры этого импульса таковы, что он имеет минимальный импульс, максимальный импульс и частоту повторения. Учитывая ограничения вращения сервопривода, нейтраль определяется как положение, в котором сервопривод имеет точно такое же количество потенциального вращения в направлении по часовой стрелке, как и в направлении против часовой стрелки.Важно отметить, что разные сервоприводы будут иметь разные ограничения на их вращение, но все они имеют нейтральное положение, и это положение всегда составляет около 1,5 миллисекунд (мс).
Угол определяется длительностью импульса, подаваемого на провод управления. Это называется широтно-импульсной модуляцией. Сервопривод ожидает увидеть импульс каждые 20 мс. Длина импульса определяет, насколько сильно вращается двигатель. Например, импульс 1,5 мс заставит двигатель повернуться в положение 90 градусов (нейтральное положение).
Когда этим сервоприводам будет дана команда двигаться, они переместятся в положение и удерживают это положение. Если внешняя сила давит на сервопривод, когда сервопривод удерживает позицию, сервопривод будет сопротивляться выходу из этого положения. Максимальное количество силы, которое может оказать сервопривод, — это номинальный крутящий момент сервопривода. Однако сервоприводы не будут оставаться на своем месте вечно; импульс положения должен быть повторен, чтобы сервопривод оставался на месте.
Когда на сервопривод отправляется импульс, который меньше 1.За 5 мс сервопривод поворачивается в положение и удерживает выходной вал на несколько градусов против часовой стрелки от нейтральной точки. Когда импульс шире 1,5 мс, происходит обратное. Минимальная ширина и максимальная ширина импульса, который заставит сервопривод повернуться в допустимое положение, являются функциями каждого сервопривода. Разные марки и даже разные сервоприводы одной марки будут иметь разные максимумы и минимумы. Обычно минимальный импульс имеет ширину около 1 мс, а максимальный — 2 мс.
Еще один параметр, который изменяется от сервопривода к сервоприводу, — это скорость поворота. Это время, которое требуется сервоприводу, чтобы перейти из одного положения в другое. Наихудшее время поворота — это когда сервопривод удерживает минимальное вращение и получает команду перейти на максимальное вращение. На сервоприводах с очень высоким крутящим моментом это может занять несколько секунд.
Цель этой информации — дать обзор того, как работают сервоприводы и как с ними взаимодействовать. Хотя мы предприняли шаги для обеспечения качества информации здесь, ServoCity не дает никаких гарантий относительно представленной информации.ServoCity не может нести ответственность за любое использование или неправильное использование предоставленной информации. Если у вас есть вопросы по этой информации, пишите на [email protected].
Как мне управлять сервоприводом от Arduino?
Как мне управлять сервоприводом с Raspberry Pi?
Хотя Raspberry Pis может выводить сигнал ШИМ, они часто не могут поддерживать чистый сигнал из-за отсутствия специального таймера. Если вы управляете сервоприводами с Raspberry Pi, мы настоятельно рекомендуем приобрести сервопривод для вашего Raspberry Pi.
Как включить сервопривод?
Наилучший способ запитать сервопривод — это использовать аккумулятор с напряжением в диапазоне напряжений, указанном в таблице спецификаций серво страниц. Обязательно используйте исправную батарею, которая может обеспечивать более чем достаточный ток. Поскольку ток втягивается, а не проталкивается, наличие большего тока, чем необходимо, не повредит сервоприводу (это все равно, что иметь больше газа, чем нужно, чтобы получить место в машине). Питание серводвигателя подается по красному проводу.Может быть полезно перерезать красный провод (или использовать X-Acto, чтобы вытащить разъем из корпуса), чтобы вы могли подавать питание отдельно от сигнала. Это позволит вам питать ваш приемник от другой батареи, чем ваш сервопривод, если им нужны другие напряжения. Это также позволит вам запитать двигатель сервопривода напрямую от батареи, в то время как сигнал поступает от Arduino, поскольку выводы Arduino не могут обрабатывать ток, необходимый сервоприводу (обычно они достигают максимума 40 мА).
Как отправить сигнал на большое расстояние?
Иногда при отправке сигнала на большое расстояние сигнал может ухудшаться из-за падения напряжения и электромагнитных помех (EMI).Усилитель сервосигнала может решить эти проблемы и упростить передачу сигнала на большое расстояние по проводу.
Как повернуть сервопривод на определенную величину (90 °, 180 °, непрерывно и т. Д.)?
При управлении с помощью системы радиоуправления большинство сервоприводов для хобби предлагают вращение на 90 ° (45 ° в любом направлении) прямо из коробки. Иногда это можно увеличить, если ваша радиосистема предлагает настройку конечной точки или ваш сервоконтроллер имеет перемычку на 180 °.Если вы используете цифровые сервоприводы Hitec, вы просто хотите приобрести ручной программатор, чтобы увеличить вращение. Если у вас есть аналоговый сервопривод Hitec или Futaba, который предлагает вращение только на 90 °, угол поворота иногда можно увеличить до 180 °, выполнив простую модификацию.
Примечание: Вы можете приобрести у нас сервоприводы Hitec, предварительно модифицированные на нашем собственном производственном предприятии, на отдельных страницах сервоприводов Hitec. Эта модификация аннулирует все гарантии ServoCity и Hitec.
Как заменить сервопривод?
Как измеряется скорость сервопривода?
Как измеряется крутящий момент сервопривода?
На что ссылается «направление» сервопривода?
Все сервоприводы будут вращаться по и против часовой стрелки. Направление вращения сервопривода зависит от сигнала, который он получает. Не все сервоприводы сразу после установки совпадают по направлению вращения.Если вы подключите сервопривод Hitec к приемнику радиоуправления или сервоконтроллеру и прикажете сервоприводу повернуться вправо (по часовой стрелке), он переместится вправо. Если вы затем подключите сервопривод Futaba к тому же ресиверу или сервоконтроллеру и скажете ему двигаться в том же направлении, что и сервопривод Hitec, он будет двигаться в противоположном направлении (против часовой стрелки). Это легко исправить с большинством систем радиоуправления, поскольку они имеют на передатчике функцию серво реверсирования
. Эта разница между производителями является причиной того, что каждый сервопривод будет иметь спецификацию, указывающую направление, в котором сервопривод будет двигаться с возрастающим сигналом ШИМ.
Что такое серво-сплайн?
Зубчатый выходной вал сервопривода обычно называют шлицем сервопривода. Для разбивки всех различных видов шлицевых сервоприводов на сервоприводы, которые мы продаем, ознакомьтесь с записью Servo Spline в нашем глоссарии.
Введение в серводвигатели — Курсы — Изучить
В этом руководстве мы предоставим техническую информацию о серводвигателях и о том, как они работают. Мы упростили настройку робота и работу с ним, однако есть много забавных и интересных вещей, которые можно узнать о том, как работает робот.Чем больше вы знаете, тем больше вы можете заставить своего робота делать!Содержание
Ответ № 1: Цифровой сверхмощный
Ответ № 2: Тише, контроль температуры, выдерживает острую нагрузку
Ответ № 3: Роботы Revolution и комплект разработчика
Что такое серводвигатель?
Серводвигатель (или сервопривод) — это поворотный привод, который позволяет точно контролировать угловое положение, скорость и ускорение.Сервоприводы можно найти во многих местах: от игрушек и домашней электроники до автомобилей и самолетов. Если у вас есть радиоуправляемая модель автомобиля, самолета или вертолета, вы используете как минимум несколько сервоприводов. Сервоприводы также появляются негласно в устройствах, которые мы используем каждый день. В электронных устройствах, таких как проигрыватели DVD и Blu-ray Disc TM , используются сервоприводы для выдвижения или втягивания лотков для дисков.
EZ-Robots использует сервоприводы, которые управляют движением суставов, панорамированием и наклоном, а также непрерывным вращательным движением.EZ-B v4 посылает электрический сигнал, который сообщает сервоприводу, какой позиции нужно достичь и как быстро туда попасть. Сервоприводы бывают разных форм и размеров для различных применений. Вам может понадобиться большая и мощная ручка для перемещения руки большого робота или крошечная, чтобы брови робота поднимались и опускались. Соединив многие из этих сервоприводов вместе, вы можете очень легко создавать роботов, которые выполняют сложные операции в реальном мире. В наших роботах Revolution используются два наиболее распространенных размера, как показано ниже.
Сервопривод против ШИМ
PWM означает широтно-импульсную модуляцию. ШИМ — это процесс быстрого включения и выключения цифрового напряжения для имитации диапазона напряжения. Например … Если цифровой выходной вывод микроконтроллера составляет 3,3 В, а ШИМ установлен на рабочий цикл 50%, выходное напряжение будет примерно 1,65 В. Это связано с тем, что микроконтроллер очень быстро включает и выключает цифровой вывод 3,3 В, что создает имитацию более низкого напряжения. Вы можете использовать ШИМ, например, для изменения яркости светодиода.
Сервопривод также использует ШИМ. «Кадр» серво-ШИМ-сигнала составляет 20 мс. Многие контроллеры, такие как библиотеки Arduino, не поддерживают спецификацию 20 мс, определенную для сервоприводов. Из-за этого перед производителями сервоприводов возникли проблемы при декодировании входящих сигналов ШИМ. Это вызвало необходимость в сервоприводах быть «умнее» за счет адаптации к необычной ШИМ, передаваемой плохо написанными библиотеками, которые не придерживаются Стандарта сервомашинной ШИМ. EZ-B соответствует стандартам серво ШИМ.
Как работает серводвигатель?
Простота сервопривода — одна из особенностей, делающих их такими надежными. Сердце сервопривода — это небольшой двигатель постоянного тока (DC), подобный тому, который вы можете найти в недорогой игрушке. Эти двигатели работают на электричестве от батареи и вращаются с высокой скоростью оборотов в минуту (оборотов в минуту), но выдают очень низкий крутящий момент (скручивающая сила, используемая для работа — вы прикладываете крутящий момент, открывая банку).Расположение шестерен принимает высокую скорость двигателя и замедляет ее, в то же время увеличивая крутящий момент. (Основной закон физики: работа = сила x расстояние.) Крошечный электродвигатель не имеет большого крутящего момента, но он может вращаться очень быстро (небольшая сила, большое расстояние). Конструкция шестерни внутри корпуса сервопривода преобразует выходную мощность в более низкую скорость вращения, но с большим крутящим моментом (большая сила, небольшое расстояние). Объем реальной работы такой же, только полезнее. Шестерни недорогого серводвигателя, как правило, делают из пластика, чтобы сделать его легче и дешевле.В сервоприводе, предназначенном для обеспечения большего крутящего момента для более тяжелых работ, шестерни сделаны из металла (например, в сервоприводах EZ-Robot) и их труднее повредить.
В маленьком двигателе постоянного тока подается питание от батареи, и двигатель вращается. Однако, в отличие от простого двигателя постоянного тока, вращающийся вал двигателя сервопривода замедляется с помощью шестерен. Датчик положения на конечной передаче подключен к небольшой печатной плате. Датчик сообщает этой плате, насколько повернут выходной вал сервопривода. Электронный входной сигнал от компьютера или радио в автомобиле с дистанционным управлением также подается на эту печатную плату.Электроника на печатной плате декодирует сигналы, чтобы определить, насколько пользователь хочет, чтобы сервопривод повернулся. Затем он сравнивает желаемое положение с фактическим положением и решает, в каком направлении вращать вал, чтобы он достиг желаемого положения.
| Рисунок 5. Печатная плата и двигатель постоянного тока в сервоприводе большой мощности. Вы заметили, как мало деталей на плате? Сервоприводы превратились в очень эффективную конструкцию за многие годы. |
Типы серводвигателей
Сервоприводыбывают разных размеров и трех основных типов: позиционное вращение, непрерывное вращение и линейное.
- Сервопривод позиционного вращения : это наиболее распространенный тип серводвигателя. Выходной вал вращается примерно на половину круга, или на 180 градусов. Он имеет физические упоры, размещенные в зубчатом механизме, чтобы предотвратить поворот за эти пределы для защиты датчика вращения. Эти обычные сервоприводы находятся в руках, ногах, конечностях EZ-Robot и т. Д.. Например, роботы JD или Six используют эти сервоприводы.
- Сервопривод непрерывного вращения : Он очень похож на обычный сервомотор позиционного вращения, за исключением того, что он может вращаться в любом направлении бесконечно. Управляющий сигнал, а не установка статического положения сервопривода, интерпретируется как направление и скорость вращения. Диапазон возможных команд заставляет сервопривод вращаться по часовой стрелке или против часовой стрелки по желанию с различной скоростью в зависимости от командного сигнала.Вы можете использовать сервопривод этого типа на радарной тарелке, если вы установили его на роботе. Или же вы можете использовать его в качестве приводного двигателя мобильного робота. EZ-Robot AdventureBot использует два сервопривода непрерывного вращения с колесами. Центр (90 градусов) — это центр положения СТОП непрерывного вращения. Чем дальше вы отклоняетесь от 90 градусов в любом направлении, тем больше регулируется скорость сервопривода непрерывного вращения в этом направлении.
- Линейный сервопривод : он также похож на описанный выше серводвигатель позиционного вращения, но с дополнительными шестернями (обычно зубчато-реечный механизм ) для изменения выходной мощности с круговой на возвратно-поступательную.Эти сервоприводы нелегко найти, но иногда их можно найти в хобби-магазинах, где они используются в качестве приводов в более крупных моделях самолетов.
Управление серводвигателем
Стандартный сервопривод — это то, что вы обычно найдете в игрушках R / C Hobby. Это высокоточные устройства, способные вращать вал до 180 градусов. С EZ-B и стандартным сервоприводом вы можете легко настроить, на сколько градусов нужно повернуть выходной вал.EZ-B SDK и EZ-Builder позаботятся об электрической связи с сервоприводом за вас.Стандартные сервоприводы можно использовать для головы или рук вашего робота.
Тем не менее, вот некоторая техническая информация о том, как работают сервоприводы. Сервопривод управляется импульсным управлением. Управляющий импульс представляет собой положительное напряжение длительностью от 1 до 2 мс, которое определяет угол поворота вала. Управляющий импульс повторяется каждые 18-25 мс.
EZ-B имеет синхронизацию менее 1 мс и более 2 мс для работы со всеми типами сервоприводов. Некоторые сервоприводы не соответствуют спецификациям и требуют необычного времени.При тестировании с вашим сервоприводом убедитесь, что вы распознали максимальные и минимальные значения и установили их в элементе управления. Если сервопривод пытается переместиться дальше своего максимального положения, он может быть поврежден. Кроме того, если сервопривод повернут слишком далеко, он будет потреблять много тока, и EZ-B может сброситься.
Вот тайминги для EZ-B …
Позиция 1 на v4
Положение 90 на v4
Положение 180 на v4
EZ-B v4 имеет высокую точность, которая обеспечивает 180 положений сервопривода.EZ-B v4 может управлять 24 сервоприводами одновременно, одновременно выполняя другие различные заданные пользователем задачи. Если ваши сервоприводы потребляют больше тока, чем указано в нашей спецификации, EZ-B может выйти из строя и перезагрузиться. Это называется перерывом в работе. Чтобы предотвратить отключение многих сервоприводов, используйте альтернативное питание. Посмотрите в руководстве, как это сделать.
EZ-Builder и EZ-SDK выполнят техническую работу за вас. Просто укажите положение сервопривода и вуаля!
Как работает сервопривод непрерывного вращения?
Сервопривод непрерывного вращения, как упоминалось ранее в этом уроке, будет вращать вал вращения непрерывно в любом направлении.Когда сервопривод принимает положение 90 градусов, которое является центром стандартного сервопривода, сервопривод непрерывного вращения прекращает вращение. Центр (90 градусов) — это центр положения СТОП непрерывного вращения. Чем дальше вы отклоняетесь от 90 градусов в любом направлении, тем больше регулируется скорость сервопривода непрерывного вращения в этом направлении. Сервопривод непрерывного вращения будет иметь открытый потенциометр (потенциометр), который позволит вам точно настроить положение СТОП с помощью небольшой отвертки. Щелкните здесь, чтобы просмотреть учебное пособие по калибровке сервопривода непрерывного вращения. 100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
83
82
81
80
Как измеряется крутящий момент?
Теперь, когда мы рассмотрели основы работы сервопривода, следующий вопрос — крутящий момент. Крутящий момент — это мощность сервопривода. Для разных приложений потребуется более высокий или более низкий крутящий момент.В большинстве случаев можно обойтись обычным сервоприводом со средним крутящим моментом. Средний крутящий момент пластикового сервопривода составляет 2-3 кг / см при 5 вольт, а сервоприводы EZ-Robot Heavy Duty намного больше (см. Информацию о сервоприводе).То, что часто упускают из виду, — это потребление энергии. Подумайте вот о чем: свободной энергии нет. Крутящий момент равен энергии, и наоборот. Сервоприводы EZ-Robot Heavy Duty потребуют больше энергии для их перемещения, чем более дешевые пластиковые. Если слишком много сервоприводов с высоким крутящим моментом подключено к EZ-B без достаточного источника питания, он отключится.Потемнение означает, что регулятор напряжения не успевает за потребляемым током, поэтому микрочип сам перезагружается из-за низкого тока. Не волнуйтесь, роботы Revolution питаются от мощного LiPo аккумулятора и поддерживают до 24 сервоприводов!
Итак, что означают цифры крутящего момента? Давайте предположим, что значение крутящего момента сервопривода составляло 50 унций на дюйм
Что ж, если бы на вашем сервоприводе был сервомеханизм длиной один дюйм, он мог бы создавать тянущее или толкающее усилие 50 унций на конце рычага сервопривода. перед срывом.Если бы у вас был сервомеханизм 1/2 дюйма, как вы думаете, какой была бы сила? Ага, 100 унций силы. Как насчет 2-дюймовой руки, 25 унций силы — легко, да?
Замена главного цилиндра и сервоблока
Двухконтурный цилиндр и сервопривод
Тандемный главный цилиндр, обслуживающий двухконтурную тормозную систему и установленный на вакуумном сервоприводе.Если главный цилиндр течет замените его. В цилиндр обычно устанавливается на перегородке, разделяющей двигатель и салон автомобиля.Может быть оснащен вакуум сервопривод Блок.
Главный цилиндр обычно подключается к тормозить педаль с помощью толкателя. На некоторых автомобилях, особенно тех, которые изначально были разработаны для левостороннего вождения, он может быть расположен сбоку от моторного отсека и соединен с педалью поперечной штангой.
Также необходимо заменить негерметичный или неисправный сервомеханизм. Это может быть неисправно, если педаль тормоза нажимается с трудом, а все другие неисправности тормоза устранены (см. Прокачка тормозов ).
Цилиндр одноконтурный
Главный цилиндр, обслуживающий одноконтурную тормозную систему, без сервопривода.Перед заменой проверьте состояние воздушный фильтр , что может быть причиной замедления работы. Его следует менять каждые три года, 36 000 миль или 60 000 км.
Перед отключением тормозные магистрали или электрические провода, например, к стоп-сигналу переключатель или сигнальной лампой уровня жидкости нарисуйте каждый подходит .Если у автомобиля сдвоенные тормозные магистрали, это жизненно важно. Пометьте их и соответственно пометьте корпус цилиндра.
Обратите внимание на положение шайб, втулок и педали. возвратные пружины . Проверьте, как толкатель прикреплен к педали тормоза — в рычаге педали может быть более одного отверстия.
Если вы опустошите тормозная жидкость из главного цилиндра, больше не используйте жидкость.
Подготовка к снятию главного цилиндра
Если резервуар можно отсоединить, снимите его с главного цилиндра.Если он не был опорожнен, закройте нижние выпускные отверстия пальцами, чтобы уловить капли.Тормозную жидкость можно слить из резервуар или оставлен и запечатан. Как правило, лучше слить всю систему.
Для опорожнения цилиндра откройте офсайд переднего колеса. кровоточить соска. Если в автомобиле установлена сплит-система, откройте также офсайдный ниппель заднего колеса. В случае сомнений откройте по очереди каждый спускной ниппель, сначала передний, затем задний.
Подставьте по банке под каждый сосок и насос педаль тормоза, пока цилиндр не опустеет.Не допускайте попадания тормозной жидкости на лакокрасочное покрытие автомобиля, так как она вызывает коррозию. Если немного случайно пролилось, немедленно вытрите его.
Если оставить главный цилиндр полным, тюлень отверстие сапуна в крышке сапуна скотчем. Или закрутите колпачок на тонкий лист пластика.
Небольшое количество жидкости все равно будет вытекать, поэтому подложите большое количество ветоши под цилиндр и тормозные магистрали.
На некоторых автомобилях бачок представляет собой отдельный блок, который можно отсоединить от цилиндра и установить на замену.
Если он полон, закройте отверстие сапуна, а при снятии резервуара быстро закройте нижние выпускные отверстия пальцами, чтобы уловить капли.
Отсоединение толкателя
Чтобы отсоединить толкатель, распрямите шплинт и вытащите его плоскогубцами. Вытолкните штифт в сторону.На большинстве автомобилей толкатель соединен с рычагом педали тормоза с помощью шпильки, которая удерживается на месте шплинтом или зажимом.
связь может быть настолько высоко над рычагом педали, что вам придется снять полку или панель отделки, чтобы добраться до нее.
Выпрямите шплинт и вытащите его плоскогубцами. Вытолкните штифт в сторону.
При повторной сборке используйте новый шплинт и убедитесь, что шток вставлен в правильное отверстие.
Если рычажный механизм труднодоступен, попробуйте протолкнуть штифт через полоску липкой ленты, затем оберните ленту вокруг пальца, чтобы удерживать ее, пока вы найдете отверстие.
Отсоединение толкателя VW
На некоторых старых автомобилях VW толкатель можно вынуть прямо из главного цилиндра. При повторной сборке, возможно, потребуется отрегулировать ее длину с помощью контргайки.На некоторых автомобилях VW толкатель можно вынуть прямо из главного цилиндра; его не нужно отсоединять от педали тормоза. Проверьте тип в руководстве по ремонту.
При повторной сборке может потребоваться отрегулировать длину толкателя.Ослабьте контргайку и поверните шток так, чтобы между шаровым концом штока и его посадкой в цилиндре оставался зазор примерно 1/25 дюйма (1 мм). поршень .
На автомобилях с тандемным главным цилиндром убедитесь, что регулировка упора педали позволяет педали полностью перемещаться, чтобы в случае отказа одной системы она могла работать с другой.
Снятие главного цилиндра
Пометьте тормозные трубки, ведущие к главному цилиндру, бирками, чтобы облегчить установку, затем отсоедините их.Отсоединить тормозные магистрали от главного цилиндра; закройте трубы, чтобы предотвратить проливание, или дайте жидкости стечь в емкость.
Отсоедините все электрические провода, например, от сигнальной лампы уровня жидкости или выключателя стоп-сигнала.
Возможно, вам также придется отсоединить любые другие части, которые мешают, например, воздушную заслонку или тросы газа.
Отверните болты, которыми главный цилиндр крепится к сервоприводу или перегородке.Как правило, главный цилиндр фиксируется двумя гайками и шпильки , или гайки и болты.Иногда есть также скоба, удерживающая его с внутренней стороны крыла.
На VW Beetles главный цилиндр находится внутри переднего багажного отделения и откручивается изнутри арки переднего колеса. Снимите колесо, чтобы добраться до гаек.
Снимите болты, удерживающие цилиндр, и снимите его, стараясь не уронить шайбы.
Часто цилиндр можно снять, оставив трубы на месте, как показано на рисунке, если они достаточно длинные, чтобы можно было переместить его в сторону.Будьте осторожны, чтобы не уронить шайбы. Проверьте наличие уплотнения между ним и сервоприводом.После установки нового главного цилиндра сначала вручную завинтите штуцеры, затем затяните их гаечным ключом, они легко перекручиваются с резьбой.
После завершения сборки залейте тормозную жидкость в пустой бачок. Независимо от того, опорожнен ли резервуар, прокачайте тормоза. Долейте резервуар.
Замена сервоблока
Отсоедините сервомеханизм от главного цилиндра.Проверьте состояние любого уплотнения между сервоприводом и цилиндром и при необходимости установите новое уплотнение.При замене только сервоагрегата можно будет снять главный цилиндр, не отсоединяя тормозные трубопроводы — они могут быть достаточно длинными, чтобы его можно было переместить в сторону.
Если да, то сливать жидкость из главного цилиндра нет. Если нет, отключите толкатель и снимите главный цилиндр, как описано.
Если между сервоприводом и главным цилиндром есть уплотнение, проверьте его состояние и при необходимости замените.
Не то, как вакуумный шланг подсоединяется к сервоприводу, а затем отсоединить его, ослабив хомут.Сделайте набросок того, как шток сервопривода соединен с педалью тормоза, и как вакуум шланг подключен к сервоприводу. Отключите их обоих.
Отверните сервомеханизм от кронштейна на перегородке и снимите его. Если есть прокладка между сервоприводом и переборкой проверьте, не изношена ли она; при необходимости обновить.
При установке нового блока проверьте состояние вакуумного шланга и при необходимости замените его.Убедитесь, что зажимы плотно прилегают.
Если главный цилиндр был отсоединен, удалите воздух из системы после завершения сборки.
Отсоедините сервомеханизм от главного цилиндра. Проверьте состояние любого уплотнения между сервоприводом и цилиндром и при необходимости установите новое уплотнение.
Обратите внимание на то, как сервомеханизм связан с педалью тормоза, а затем отсоедините его. Отверните серво блок от монтажного кронштейна. Извлеките сервомеханизм. Если между сервоприводом и его креплением есть прокладка, проверьте ее состояние и замените ее в случае износа.Обратите внимание, как вакуумный шланг подсоединен к сервоприводу, а затем отсоедините его, ослабив зажим шланга.
Обратите внимание на то, как сервомеханизм связан с педалью тормоза, а затем отсоедините его. Отвинтите серво блок от монтажного кронштейна. Извлеките сервомеханизм. Если между сервоприводом и его опорой есть прокладка, проверьте состояние и замените ее в случае износа.
Замена серво воздушного фильтра
Обычно вам не нужно снимать сервопривод, чтобы добраться до воздушного фильтра.Беритесь за него изнутри автомобиля или между задней частью устройства и перегородкой.На большинстве более поздних автомобилей присутствует войлочный воздух фильтр установлен на задней части сервоблока, охватывая толкатель.
Обычно нет необходимости снимать сервопривод для замены фильтра. Вы должны иметь возможность добраться до него либо между задней частью устройства и переборкой, либо изнутри автомобиля.
Используйте острый нож, чтобы разрезать новый войлочный фильтр по его радиусу, сделав наклонный надрез под углом примерно 45 градусов, чтобы подогнать его к толкателю.Фильтр закрыт резиновым чехлом. Сдвиньте манжету вдоль толкателя, чтобы открыть фильтр, и снимите фильтр.
Острым ножом разрежьте новый фильтр поперек радиус , делая надрез под углом примерно 45 градусов.
Наденьте фильтр на толкатель, поместите его в корпус и сожмите два конца фильтра вместе. Наденьте резиновый чехол на фильтр.
сервоприводов (7/13) | OpenTX университет
Мы рассмотрели много информации, которая собрана здесь, на экране Servos.Это было бы отличным временем для обзора «Важной информации о перемещении сервоприводов», которую мы разработали в начале класса, особенно концепций весов, пределов по умолчанию и расширенных пределов, влияния триммирования и субтриммера на конечные точки и уравнения для расчета сервопривода путешествовать. Вот ярлык, если вы хотите вернуться к этой информации, и вы можете использовать кнопку «Назад» в браузере, чтобы вернуться сюда.
Давайте проверим безопасность, прежде чем продолжить. Если ваш Rx установлен в модели, использующей электрическую летную мощность, пожалуйста, снимите опору, прежде чем мы продолжим.Я знаю, что вы, вероятно, делали это много раз и не пострадали; Я просто не хочу, чтобы этот урок никого обидел. Пожалуйста, удалите опору для остальной части нашего класса базовой настройки самолета.
Вот как выглядит верхняя часть нашего экрана сервопривода до того, как мы настроим поведение сервопривода:
OpenTX предоставляет линию для каждого из 32 возможных радиоканалов, и входы, которые мы настроили в Inputs, отображаются на каналах, которые мы назначили в Mixer. Каждая линия / канал управляет по крайней мере одним сервоприводом или другим устройством, таким как ESC, из этой позиции на приемнике.Каждая строка содержит 7 полей, которые определяют, как сервопривод / устройство будет реагировать на канал.
Досадная часть экрана Servos состоит в том, что почти все влияет почти на все остальное. Обычно вы желаете одного результата («Я хочу, чтобы мой самолет не катился вправо»). Вы предпринимаете соответствующее действие (добавляете триммер левого элерона). Вы получаете желаемый результат (самолет перестает катиться), но вы также получаете нежелательный не столь очевидный эффект («Я тоже не могу катиться влево, но правый бросок все еще хорош.”)
OpenTX дает вам больше гибкости в формировании поведения, чем любая другая радиостанция с закрытым исходным кодом, которую вы могли бы купить. В результате вам предоставляется выбор и показываются взаимодействия, которые большинство радиостанций с закрытым исходным кодом решают за вас, а затем скрывают взаимодействия. В этом разделе курса о сервоприводах мы помогаем вам «посчитать», если вы хотите точно настроить свой самолет в соответствии с вашими предпочтениями, а затем мы предлагаем упростить подходы к настройке, если вы хотите сказать: «К черту математику, я просто хочу, чтобы мой самолет полетел ».Суть в том, что чем больше ваш самолет построен прямым и квадратным, правильно сбалансирован и хорошо установлены органы управления, тем меньше вам потребуется дифферента и дополнительного триммирования, чтобы он хорошо летал. Многие из сложностей экрана сервоприводов призваны помочь исправить недостатки в самолете.
Начнем с малого — обрезки и субтриммера. Триммер и субтриммер имеют те же результаты, что и сервопривод, но субтриммер устанавливается на экране сервоприводов с самолетом на скамейке, а триммер регулируется с помощью кнопок триммирования Tx с самолетом в полете.Sub-Trim используется для достижения наилучшей механической геометрии физической настройки сервопривода / рычага / рычага / рупора, чтобы привести поверхности управления в их сбалансированное нейтральное состояние, когда ручки Tx и триммеры центрированы. Триммеры — это корректировки в полете для достижения прямого / горизонтального полета самолета.
Прежде чем продолжить, убедитесь, что все триммеры Tx отцентрированы, и перейдите к первому полю справа от названия линии на экране «Сервоприводы». Метка в верхней части экрана изменится, чтобы сообщить вам, что вы находитесь в поле дополнительной обрезки.Увеличение значения субтриммера перемещает эту контрольную поверхность к стороне «увеличивающегося сигнала» сервоцентра, а уменьшение значения перемещает ее на другую сторону. Обратите внимание, что возрастающий сигнал может быть вращением сервопривода по или против часовой стрелки в зависимости от других решений, включая выбор сервопривода. Отрегулируйте значение подрезки, чтобы центрировать поверхности управления. Если ваш субтриммер составляет более +/- 5%, взгляните на свою механическую настройку, чтобы увидеть, сможете ли вы улучшить центрирование контрольной поверхности без такого большого количества субтриммеров.
Если поведение субтриммера оставить в линейном режиме (подробнее об этом ниже), тогда субтриммер будет действовать так же, как удерживание стика на одной стороне от центра. Но так как ручка по-прежнему начинается из своего физического центра, если вы продолжите перемещать ручку до ее предела с этой стороны, то сигнал сервомакс выйдет раньше, чем ручка. Если вы переместите ручку в противоположную сторону, ручка остановится до того, как сервосигнал достигнет максимума. Что касается обрезанной стороны, у вас все еще есть полные 100% (512 мкс) сигнала, но он приходит раньше.В стороне от триммера у вас есть менее 100% сигнала, доступного сервоприводу на величину триммирования, переданного другой стороне. Таким образом, линейное добавление субтриммеров приводит к тому, что вы теряете кое-что с обеих сторон джойстика.
Последнее поле справа от каждой строки называется режимом дополнительной обрезки и показывает символ по умолчанию « ∆» . Этот выбор режима «снижает» чувствительность джойстика к сервоприводу и увеличивает ход сервопривода по мере необходимости, заставляя как стик, так и сервопривод достичь максимума вместе при предельных значениях по обе стороны от настроенной начальной точки.Это значение по умолчанию хорошо работает для простых настроек, то есть с несколькими сервоприводами, управляемыми Y-образным кабелем, или без сочетания других каналов с этим каналом управления. Переменная чувствительность прилипания к сервоприводу может вызвать неожиданные эффекты там, где в канале используются миксы и кривые, поэтому доступен альтернативный выбор ‘=’ для сохранения линейной зависимости за счет компромиссов, описанных выше для триммирования и субтриммера. .
Вы можете подумать: «Да здравствует глупость, просто сделайте новую точку центра ручки на 5% выше».На самом деле это доступно вам в поле «PPM center» справа в строке канала, которое показывает значение по умолчанию «100%» или «1500us», то есть центральную точку сервопривода, готовую к редактированию. Этот выбор иногда используется вместо субтриммера для достижения хорошей геометрии сервопривода. Подробнее об этом ниже.
Взаимосвязи резюмированы на следующем рисунке, подготовленном разработчиками OpenTX:
- Типы сервоприводов
Каждый вариант имеет свои преимущества и недостатки, поэтому он становится предпочтением пользователя, а не правильным / неправильным решением.Обратите внимание, что две кривые дополнительной обрезки (синяя и красная) показывают корректировку с одной стороны от центра, а сдвиг центра PPM (зеленый) показывает корректировку с другой стороны. Если этих вариантов недостаточно, пользовательские кривые доступны на экране сервоприводов, чтобы адаптировать реакцию сервопривода к вашим индивидуальным потребностям — расширенная функция, доступная в поле на экране слева от сдвига центра PPM.
Лично я предпочитаю использовать режим дополнительной обрезки с соотношением по умолчанию « ∆» , потому что if работает нормально и кажется нормальным.Если вы предпочитаете линейный отклик субтриммера «=», то регулировка геометрии сервопривода с сдвигом центра PPM также может быть рассмотрена в качестве опции. Просто убедитесь, что вы ограничиваете ход сервопривода до безопасных значений с любым из этих вариантов. Поиграйте с доступными комбинациями и решите для себя, что вам больше по душе.
Стоит повторить: если у вас хорошая сборка и установка оборудования, сложности обрезки и подрезки исчезают. Если ваша установка по какой-либо причине требует большого количества подрезки и / или подрезки, OpenTX обеспечивает неограниченную гибкость для настройки отклика сервопривода.
Последняя функция, связанная с триммером и субтриммером, расположена в самом низу экрана сервоприводов и довольно крутая. LP ENT в строке «Триммеры на субтриммеры» добавит все триммеры полета к их значениям субтриммера и сбросит триммеры на ноль. Это может быть удобно в полевых условиях после полёта по дифференту и балансировке, но представляет те же риски, описанные выше, при регулировке субтриммеров, особенно если триммеры были большими. Эта функция удовлетворяет потребности тех, кто предпочитает летать с обнуленным триммером.
Базовый самолет стр. 7 Экран сервоприводов 2
Эта невинно выглядящая стрелка, указывающая вправо, — это поле, которое меняет нормальное направление движения сервопривода. Перейдите к этому полю, и кнопка ENT переключит стрелку с обычного (стрелка вправо) на обратное (стрелка влево). Одним из источников возможной путаницы является то, что ход сервопривода также может быть отменен на экранах входов и микшера путем ввода отрицательных весов. Мы настоятельно рекомендуем изменить направление сервопривода в поле «Сервоприводы», потому что это с помощью весов в Inputs или Mixer может запутать отношения, определенные на этих экранах, а также привести к тому, что обрезки будут действовать противоположно соответствующему ручке управления.
Пришло время завершить экран сервоприводов, настроив наши отклонения управления высокой скоростью. Это делается по формуле:
мас.% Нетто на входе(до 100%) |
х |
мас.% Нетто в смесителе(чистая масса более 100% уменьшена до 100%) |
х |
% от предела хода сервопривода (до 100% или до 150% при расширенных пределах) |
= | Процент +/- 100% (512 мкс) хода до сервопривода |
Напомним, что пределы хода сервопривода по умолчанию останавливаются на 100%, если на экране настройки модели (2/13) не установлен флажок «Расширенные пределы», который допускает до 150%.В противном случае любое число меньше 100% (или 512 мкс) по умолчанию может быть введено в поле «% от ограничения хода сервопривода». На экране сервопривода есть два поля: одно для положительной стороны от центра и одно для отрицательной стороны. Если вы переместите джойстик для редактируемого элемента управления, пунктирная линия между этими двумя полями станет стрелкой, указывающей на поле для этой стороны джойстика. Отрегулируйте это поле ограничения сервопривода, чтобы получить максимальный ход управления, который вам нужен в высоких скоростях для данной поверхности управления.Не допускайте чрезмерного перемещения сервопривода или поверхности управления, чтобы не повредить оборудование. После регулировки отклонений Hi Rate, отклонения сервоприводов с уменьшенной скоростью уже определены настройками, которые вы ввели в Inputs.
Совет: помните, что опция одностороннего стика во входах? Это позволит вам рассматривать каждую сторону джойстика как разные входы с разными скоростями, экспозицией, серво-триммером, суб-триммером и ограничениями хода, если вам это действительно нужно. В противном случае пониженные ставки будут иметь одинаковый эффект на обеих сторонах данной ручки ввода.Да, разные скорости доступны с обеих сторон джойстика — еще одна расширенная функция, если вы действительно хотите тонкую настройку.
Напомним, что Монитор каналов всегда доступен для отображения эффектов пределов хода сервопривода, расширенных пределов, триммера и субтриммеров, когда вы работаете по строкам на экране сервоприводов. LP MENU — это короткий путь, а EXIT возвращает.
Давайте рассмотрим то, что мы узнали, и свяжем эти идеи вместе с цепочкой команд: что к чему.
Интерфейс сервоуправления подробно
В прошлый раз я дал базовое введение в простой импульсный интерфейс для отправки команд сервоприводам.В этом посте я хочу более подробно изучить некоторые детали и разветвления сервоинтерфейса. Я буду использовать 12-канальный сервоконтроллер Mini Maestro, который предлагает большую гибкость сервоуправления, и токовый пробник с моим осциллографом, чтобы проиллюстрировать отклики сервоприводов. Вот базовая настройка:
На этом крупном плане вы можете видеть, что у меня есть датчик тока на удлинительном кабеле сервопривода, поэтому я могу легко менять сервоприводы, не касаясь чего-либо еще:
Красный и черный зажимы в правом нижнем углу относятся к источнику переменного тока, а на нетбуке работает программное обеспечение Maestro Control Center, позволяющее быстро изменять ширину и частоту импульса сервоуправления.
Прежде чем мы перейдем к нескольким снимкам экрана, давайте рассмотрим основной сигнал, который мы отправляем сервоприводу. Сигнал представляет собой прямоугольную волну , что означает, что есть два уровня напряжения, между которыми мы переключаемся мгновенно (в реальной жизни переход должен занять некоторое время, но это время перехода настолько короткое, что мы можем приблизить его к нулю) :
Сигнал чередуется между нулевым вольт и импульсным напряжением, поэтому для характеристики формы сигнала необходимы только три параметра:
- Импульсное напряжение, В
- Ширина импульса, т
- Период импульса, T
Рассмотрим каждый из этих параметров.
Импульсное напряжение
Как мы видели в прошлый раз на выходных сигналах RC-приемника, импульсное напряжение может сильно отличаться. Современные приемники имеют сигналы 3,0 В, но многие сервоконтроллеры используют 5,0 В или более. По большей части, эта амплитуда сигнала не имеет большого значения, если она достаточно высока для сервопривода, чтобы регистрировать импульсы, а допустимый диапазон идеально подходит для непосредственного взаимодействия с микроконтроллером, который работает при 3,3 В или 5,0. В. Мы подключаем резисторы 220 Ом к выходам наших сервоконтроллеров, которые работают примерно на 5 Ом.0 В; резисторы защищают контакты в целом, но также предотвращают протекание слишком большого тока в случае, если сервопривод работает при более низком напряжении, чем сигнал, который он получает.
Ширина импульса
Ширина импульса обычно является наиболее важной частью интерфейса, и это то, что мы намеренно меняем, чтобы изменить команду на сервопривод. Общая идея проста: длительность импульса 1,5 мс — это то, что мы считаем «нейтральным»; увеличение ширины импульса заставит сервопривод двигаться в одном направлении, а уменьшение ширины импульса заставит сервопривод двигаться в другом направлении.Однако следует помнить о нескольких моментах:
- Нейтральная точка не обязательно является серединой абсолютного максимального диапазона сервопривода. Например, сервопривод, который может перемещаться на 180 градусов, может иметь выходной сигнал в точке 100 градусов для входного импульса 1,5 мс. В этом случае доступный диапазон будет составлять 80 градусов в одну сторону от нейтрали и 100 градусов в другую. Ширина импульса, соответствующая середине доступного диапазона, будет варьироваться от сервопривода к сервоприводу, даже для сервоприводов одной модели, поэтому, если вы заботитесь о максимальном диапазоне, вы можете иметь нейтральное значение в середине этого диапазона, вам придется откалибровать вашу систему для каждого сервопривода.
- Стандартного соответствия между шириной импульса и положением сервопривода нет. Вообще говоря, переход от 1,0 мс к 2,0 мс даст примерно 90 градусов движения сервопривода, но этот диапазон ширины импульса может соответствовать 100 градусам на одном сервоприводе и 80 градусам на другом сервоприводе. Это означает, что любой сервоконтроллер или библиотека сервоуправления, которую вы можете использовать, которая заявляет об абсолютных градусах, что-то скрывает от вас (или разработана кем-то, кто действительно не понимает интерфейс).Если вы меняете сервоприводы в своей конструкции, вам, возможно, придется внести соответствующие изменения в диапазон импульсов, которые вы посылаете на него, поэтому, если вы делаете свою собственную генерацию сервоимпульсов, рекомендуется иметь нейтральную точку и диапазон вашего сервопривода. параметризовано в вашем коде. (Подробнее об этом я расскажу в одном из следующих постов.)
- Точно так же не существует стандартной минимальной и максимальной ширины импульса. Если вы продолжите делать импульсы шире или уже, сервоприводы будут продолжать двигаться все дальше и дальше от нейтрального положения, пока не достигнут своих механических пределов и, возможно, разрушатся.Обычно это не проблема для приложений RC, поскольку когда-либо используется только половина механического диапазона, но если вы хотите использовать полный диапазон, вы должны откалибровать его и быть осторожными, чтобы не допустить сбоя сервопривода до предела.
- Направление вращения сервопривода для увеличения длительности импульса также не стандартизировано (также обычно не указывается). На моей диаграмме справа я показываю, что выходной сигнал движется по часовой стрелке по мере увеличения ширины импульса, но это может быть и наоборот.Мы можем ожидать, что соответствие между разными блоками одной и той же сервомодели останется неизменным, но направление движения сервопривода — это еще одна вещь, которую вы должны иметь возможность изменить в своей конструкции без особых усилий, чтобы у вас была возможность изменить сервопривод. модели.
- Интерфейс сервоуправления является аналоговым интерфейсом. Сигналы выглядят цифровыми, потому что у нас есть прямоугольные формы сигналов, и мы используем цифровые выходы микроконтроллера для их создания, но потому, что важно бесконечно регулируемое время, когда импульс высокий, сигнал аналоговый, и любое небольшое дрожание в ширине импульса вызовет соответствующее подергивание на выходе сервопривода.
- Хотя мы можем использовать некоторые аппаратные модули с широтно-импульсной модуляцией (ШИМ) в микроконтроллерах для генерации сигналов сервоуправления, и мы изменяем (модулируем) ширину импульса, нехорошо называть сигналы сигналами ШИМ, потому что это подразумевает актуальность рабочий цикл , который представляет собой процент времени включения (высокого уровня) сигнала. Как мы увидим далее, частота последовательности импульсов не влияет на положение сервопривода, если ширина импульса остается неизменной, поэтому изменение рабочего цикла не обязательно влияет на положение сервопривода.Точно так же мы могли бы поддерживать постоянный рабочий цикл, растягивая как t , так и T на одинаковую пропорциональную величину, и положение сервопривода изменилось бы, поскольку изменилась ширина импульса.
Период импульса
Типичный период импульса составляет около 20 мс, что соответствует частоте 50 Гц. Одним из непосредственных ответвлений частоты пульса является то, что она дает вам верхнюю границу того, насколько быстро вы можете давать сервоприводу новые команды. Большинство сервоприводов могут обрабатывать значительно более высокие частоты пульса, а некоторые специальные сервоприводы предназначены для поддержки частоты импульсов в несколько сотен герц.Однако более тонкая зависимость от частоты импульсов показывает существенное различие между аналоговыми и цифровыми сервоприводами, и этому будет уделено основное внимание в остальной части этой статьи.
Вот входной сигнал и ток, потребляемые Futaba S148, типичным стандартным аналоговым сервоприводом, подключенным к схеме, которую я показал ранее:
(Желтая кривая сверху — это управляющий сигнал; нижний зеленый сигнал — это ток, используемый сервоприводом.) Я слегка надавил на выходной вал, и мы видим, что каждый командный импульс является немедленно последовал импульс тока, когда сервопривод пытается оттолкнуть меня.По мере того, как я нажимал сильнее, сервопривод отодвигается на более длительное время после каждого командного импульса:
Я установил источник питания на 3,5 В, чтобы сервопривод не мог оттолкнуться так сильно, как мог, и, возможно, повредить себя. Если уменьшить частоту импульсов с 50 Гц до 20 Гц, мы увидим, что всплески тока также упадут до 20 Гц:
|
|
Сервопривод по-прежнему обычно работает на более низкой частоте импульсов, но рабочий цикл (процент времени, в течение которого он отталкивается) уменьшается, так что его крутящий момент также уменьшается. По мере того, как период импульсов становится еще длиннее, время между попытками исправить положение сервопривода соответственно увеличивается, а при низкой частоте импульсов, например, 10 Гц, выходной крутящий момент имеет достаточно пульсаций, которые легко ощутить.Уменьшение периода пульса имеет противоположный эффект; на частоте 100 Гц сервопривод отталкивает назад почти 50% времени даже при небольшом выходном сопротивлении, а при высокой механической нагрузке сервопривод отталкивает назад почти 100% времени:
|
|
Приятной особенностью этой общей работы аналоговых сервоприводов является то, что если вы перестанете посылать импульсы, сервоприводы перестанут пытаться удерживать положение и фактически выключатся: они больше не будут сопротивляться изменениям положения выхода (могут ли они механически обратное движение ручки — отдельная тема) и уменьшить их ток до минимального значения холостого хода.
Цифровые сервоприводыимеют внутренний микроконтроллер, который позволяет разработчикам сервоприводов гораздо больше гибкости в их реакции.Далее у меня есть соответствующие снимки экрана с относительно высокопроизводительного цифрового сервопривода GD-9257:
.Мы видим, что импульсы тока намного быстрее, чем импульсы управления; Кроме того, даже при небольшой выходной нагрузке пиковый ток превышает 1,5 А и составляет всего 3,5 В. При полном напряжении пики тока будут около 2,5 А, поэтому мы видим, что несколько сервоприводов могут быстро стать очень требовательной нагрузкой для мощности. поставка. При более высокой механической нагрузке особенно ясно, что производительность сервопривода не зависит от частоты импульсов:
|
|
Я пробовал другие сервоприводы, но в целом они вели себя одинаково. Еще одним немного более интересным устройством был высоковольтный сервопривод DS8325HV, который даже не работал при 3,5 В. При 5,0 В формы сигналов похожи на более ранние цифровые, но теперь скачки тока достигают 4 ампер:
|
|
Одно из самых интересных отличий цифровых сервоприводов не отображается на снимках экрана: некоторые цифровые сервоприводы продолжают удерживать самое последнее положение, даже если сигнал управления пропадает, а другие цифровые сервоприводы выключаются.Как обычно с продуктами RC, такое поведение не задокументировано и может иметь важные разветвления для робототехники и других проектов, не связанных с RC. Для приложений с низким энергопотреблением прекрасно иметь возможность выключать сервопривод, не посылая ему управляющие импульсы. С другой стороны, может быть неплохо, если сервопривод сохраняет свое положение, если у вас есть много сервоприводов для управления и вам не нужно часто обновлять их положение. Например, если у вас есть кинетическая скульптура из 30 сервоприводов, которая не нуждается в быстром перемещении, вы можете отправлять каждому сервоприводу отдельную команду каждые десять секунд и комфортно генерировать каждый сервоимпульс отдельно; с аналоговыми сервоприводами или сервоприводами, которые выключаются без сигнала, вы можете столкнуться с гораздо более сложной задачей генерации одновременных сервоимпульсов.
Я хочу показать вам последний забавный снимок экрана. Это возвращается к сервоприводу S148, но на этот раз захват осциллографа занимает более длительный период, поскольку сервопривод движется:
Первый управляющий импульс слева предназначен для нового положения сервопривода, и мы видим текущий скачок вверх, когда сервопривод начинает движение. Никакой механической нагрузки, кроме сервопривода, нет, поэтому ток снижается по мере увеличения выходной скорости. Когда сервопривод достигает места назначения, он немного отклоняется и меняет направление, что вызывает резкое повышение тока даже выше, чем начальный пусковой ток.
