Как подключить шаговый двигатель к Arduino. Какие компоненты нужны для управления шаговым двигателем. Как запрограммировать Arduino для управления шаговым двигателем. Какие режимы работы есть у шаговых двигателей. Как уменьшить вибрацию шагового двигателя.
Что такое шаговый двигатель и зачем он нужен
Шаговый двигатель — это особый тип электродвигателя, который преобразует электрические импульсы в дискретные механические перемещения. В отличие от обычных двигателей, вал шагового двигателя вращается не непрерывно, а пошагово. Это позволяет очень точно контролировать положение и скорость вращения вала.
Основные преимущества шаговых двигателей:
- Высокая точность позиционирования (до долей градуса)
- Возможность быстрого старта/остановки/реверса
- Высокий крутящий момент на низких скоростях
- Отсутствие эффекта накопления ошибки положения
- Возможность удержания позиции без подачи питания
Благодаря этим свойствам шаговые двигатели широко применяются в различных сферах:

- 3D-принтеры и ЧПУ-станки
- Роботы и автоматизированные системы
- Точные измерительные приборы
- Медицинское оборудование
- Оптические и лазерные системы
Типы шаговых двигателей
Существует два основных типа шаговых двигателей:
Биполярные шаговые двигатели
Биполярные двигатели имеют две независимые обмотки. Для работы требуется изменение направления тока в обмотках, поэтому схема управления более сложная. Обычно имеют 4 вывода.
Униполярные шаговые двигатели
Униполярные двигатели имеют одну обмотку с центральным отводом на каждую фазу. Это упрощает схему управления. Обычно имеют 5 или 6 выводов.
Что лучше выбрать для начала работы? Униполярные двигатели проще в управлении, но биполярные обеспечивают больший крутящий момент. Для многих проектов подойдут оба типа.
Необходимые компоненты для управления шаговым двигателем
Для управления шаговым двигателем с помощью Arduino понадобятся следующие компоненты:- Arduino (например, UNO или Nano)
- Шаговый двигатель
- Драйвер шагового двигателя (например, L293D или A4988)
- Источник питания для двигателя
- Соединительные провода
- Макетная плата (необязательно)
Важно помнить, что шаговый двигатель нельзя подключать напрямую к Arduino. Обязательно нужен драйвер, который будет управлять большими токами двигателя.

Подключение шагового двигателя к Arduino
Схема подключения может немного отличаться в зависимости от типа двигателя и используемого драйвера. Рассмотрим типовое подключение на примере биполярного двигателя и драйвера L293D:
- Подключите выводы драйвера L293D к пинам Arduino:
- Пин 1 (Enable) к 5V
- Пины 2, 7, 10, 15 (Inputs) к цифровым пинам Arduino
- Пин 16 (Vcc) к 5V
- Пины 4, 5, 12, 13 (Ground) к GND
- Соедините выводы шагового двигателя с выходами драйвера (пины 3, 6, 11, 14)
- Подключите внешний источник питания к пину 8 (Vs) драйвера и к двигателю
Обратите внимание на правильность подключения обмоток двигателя. Неправильное подключение может привести к некорректной работе или повреждению.
Программирование Arduino для управления шаговым двигателем
Для управления шаговым двигателем можно использовать стандартную библиотеку Stepper. Вот простой пример кода для вращения двигателя:
«`cpp #include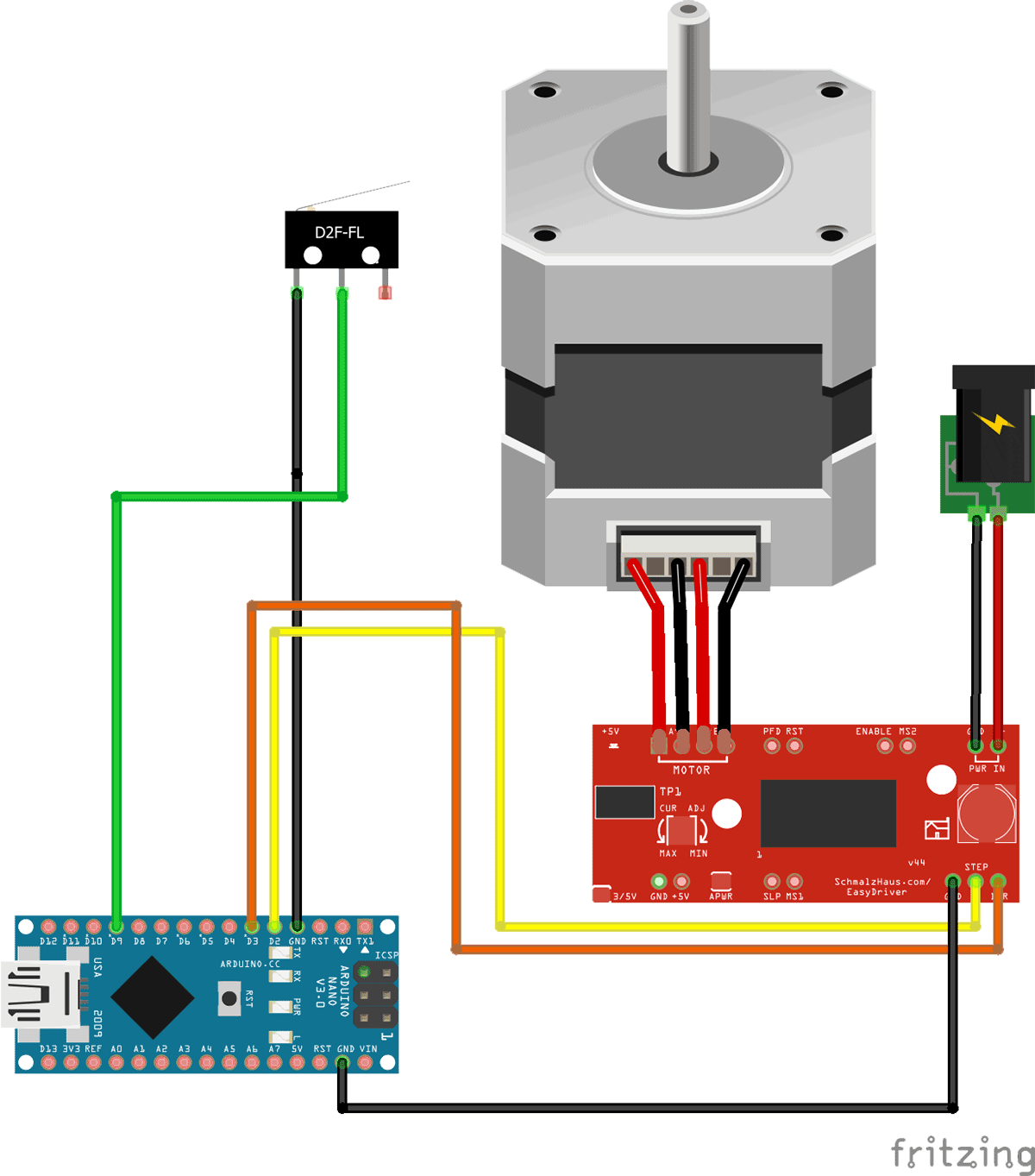
Режимы работы шаговых двигателей
Существует несколько режимов управления шаговыми двигателями:
Полношаговый режим (Full Step)
В этом режиме ротор двигателя поворачивается на полный шаг за каждый такт. Обеспечивает максимальный крутящий момент, но может вызывать вибрации на низких скоростях.
Полушаговый режим (Half Step)
Ротор поворачивается на половину шага за такт. Это увеличивает точность позиционирования в два раза и снижает вибрации, но уменьшает крутящий момент.
Микрошаговый режим (Microstepping)
Позволяет делить полный шаг на множество микрошагов (например, 1/8, 1/16, 1/32 шага). Обеспечивает очень плавное вращение и высокую точность, но требует более сложного драйвера.
Как уменьшить вибрацию шагового двигателя
Вибрация — частая проблема при работе с шаговыми двигателями. Вот несколько способов ее уменьшить:
- Использовать микрошаговый режим работы
- Подобрать оптимальную скорость вращения
- Обеспечить жесткое крепление двигателя
- Использовать демпфирующие элементы
- Выбрать качественный драйвер с функцией сглаживания тока
Экспериментируя с этими методами, можно значительно снизить уровень вибраций и шума при работе шагового двигателя.
Применение шаговых двигателей в проектах Arduino
Шаговые двигатели открывают широкие возможности для создания различных проектов на базе Arduino. Вот несколько интересных идей:
- Самодельный 3D-принтер или ЧПУ-станок
- Робот-манипулятор
- Система слежения за солнцем для солнечных панелей
- Автоматизированный телескоп
- Программируемая кормушка для животных
При работе над проектами с шаговыми двигателями важно учитывать их особенности, такие как точность позиционирования, крутящий момент и скорость вращения.
Заключение
Управление шаговыми двигателями с помощью Arduino открывает широкие возможности для создания точных механизмов и автоматизированных систем. Хотя начать работу с шаговыми двигателями может быть немного сложнее, чем с обычными DC-моторами, результат часто стоит затраченных усилий.
Экспериментируйте с различными режимами работы, оптимизируйте код и подбирайте подходящие компоненты — и вы сможете создавать впечатляющие проекты с использованием шаговых двигателей и Arduino.
Управление шаговым двигателем с помощью Arduino
В этой статье описано управление шаговым двигателем на Ардуино, снятым со старого принтера, с помощью контроллера Arduino.
Шаг 1: Шаговый двигатель
Две основных детали шагового двигателя – ротор и статор. Ротор – вращающаяся часть, она, собственно, и делает всю работу, а статор – неподвижная часть, в которую помещен ротор. В шаговом двигателе ротор – постоянный магнит. Статор состоит из нескольких катушек, которые становятся электромагнитами при прохождении через них тока. При прохождении импульса через обмотки катушек, электромагнитное поле взаимодействует с постоянным магнитом, в результате чего ротор двигается. Вращение ротора обеспечивается чередованием обмоток, на которые подается напряжение.
Шаговые двигатели обладают рядом преимуществ. Они недороги и просты в использовании. Если не подавать на обмотки напряжение, положение ротора фиксируется. Изменение направления вращения ротора происходит за счет изменения последовательности подачи импульсов на катушки.
Шаг 2: Список материалов
Показать еще 5 изображений
Для управления биполярным шаговым двигателем вам понадобятся:
- шаговый двигатель
- микроконтроллер Arduino
- изолированный медный провод
- стабилизатор тока
- транзистор
- Н-мост (мостовая схема драйвера)
- плата расширения MotorShield
Опционально:
- паяльник
- припой
- паяльный фен
- третья рука для пайки
- защитные очки
Шаг 3: Припаиваем провода
У большинства шаговых двигателей имеются четыре вывода, поэтому нужны четыре отрезка медного провода (цвет не имеет значения, я использовал отрезки разных цветов для наглядности). Эти выводы нужны для управления порядком работы катушек. Так как данный двигатель снят с принтера, то пайка проводов к нему была самой простой частью проекта.
Шаг 4: Скетч для Arduino
В контроллерах Arduino имеется предустановленная библиотека для шаговых двигателей. Вам нужно перейти во вкладку Файл – Примеры – Stepper — stepper_oneRevolution (File > Examples > Stepper >stepper_oneRevolution). Дальше вам нужно настроить количество шагов под свой конкретный двигатель (stepsPerRevolution). Поискав в интернете, я выяснил, что у моего двигателя 48 шагов на оборот. Библиотека Stepper чередует импульсы, посылаемые на обмотку катушек (проиллюстрировано в гиф-файле).
Вам нужно перейти во вкладку Файл – Примеры – Stepper — stepper_oneRevolution (File > Examples > Stepper >stepper_oneRevolution). Дальше вам нужно настроить количество шагов под свой конкретный двигатель (stepsPerRevolution). Поискав в интернете, я выяснил, что у моего двигателя 48 шагов на оборот. Библиотека Stepper чередует импульсы, посылаемые на обмотку катушек (проиллюстрировано в гиф-файле).
Шаг 5: Что такое Н-мост (мостовая схема драйвера)
Н-мост – схема, состоящая из четырех переключателей, чаще используются простые транзисторы. Транзистор – полупроводниковый ключ – включается при прохождении тока через один из пинов. Использование одного транзистора даст возможность контролировать только скорость, тогда как Н-мост дает еще и возможность контролировать направление вращения. Это происходит за счет того, что выключение разных переключателей позволяет току течь в разных направлениях, меняя тем самым полярность. Переключатели 1, 2, 3 и 4 никогда не должны включаться вместе, это вызовет короткое замыкание и может повредить устройство.
Н-мост не даст контроллеру перегореть при работе двигателя. Мотор создает сильное магнитное поле. Когда ток перестает поступать, энергия магнитного поля преобразуется в электрическую, это может повредить компоненты. Н-мост помогает защитить контроллер от повреждений. Никогда не подключайте двигатель напрямую к Arduino.
Н-мост легко собрать самим, а имеющиеся в продаже стоят недорого. В данном проекте используется Н-мост L293NE/SN754410.
Его распиновка:
- Пин 1 (1, 2EN) —> Мотор 1 Вкл/Выкл (HIGH/LOW)
- Пин 2 (1A) —> Мотор 1 Логический вывод1
- Пин 3 (1Y) —>Мотор 1 Штыревой вывод 1
- Пин 4 —>Земля
- Пин 5 —>Земля
- Пин 6 (2Y) —>Мотор 1 Штыревой вывод 2
- Пин 7 (2A) —> Мотор 1 Логический вывод 2
- Пин 8 (VCC2) —>Питание для двигателей
- Пин 9 —>Мотор 2 Вкл/Выкл (HIGH/LOW)
- Пин 10 —>Мотор 2 Логический вывод 1
- Пин 11 —>Мотор 2 Штыревой вывод 1
- Пин 12 —>Земля
- Пин 13 —>Земля
- Пин 14 —>Мотор 2 Штыревой вывод 2
- Пин 15 —>Мотор 2 Логический вывод 2
- Пин 16 (VCC1) —>Питание Н-моста (5 В)
Шаг 6: Подключение компонентов
4 штыревых вывода Н-моста должны подключаться к четырем выводам. 4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
4 логических вывода подключаются к Arduino (в этой статье это 8, 9, 10 и 11 выводы). На схеме видно, что для питания можно использовать внешний источник питания. Н-мост работает при напряжении в диапазоне 4,5-36 В.
Шаг 7: Загрузка кода и тест
Загрузите код в Arduino. Если вы ошиблись при подключении, мотор вместо вращения начнет вибрировать. Попробуйте разные скорости и направления вращения, чтобы понять, что вам нужно.
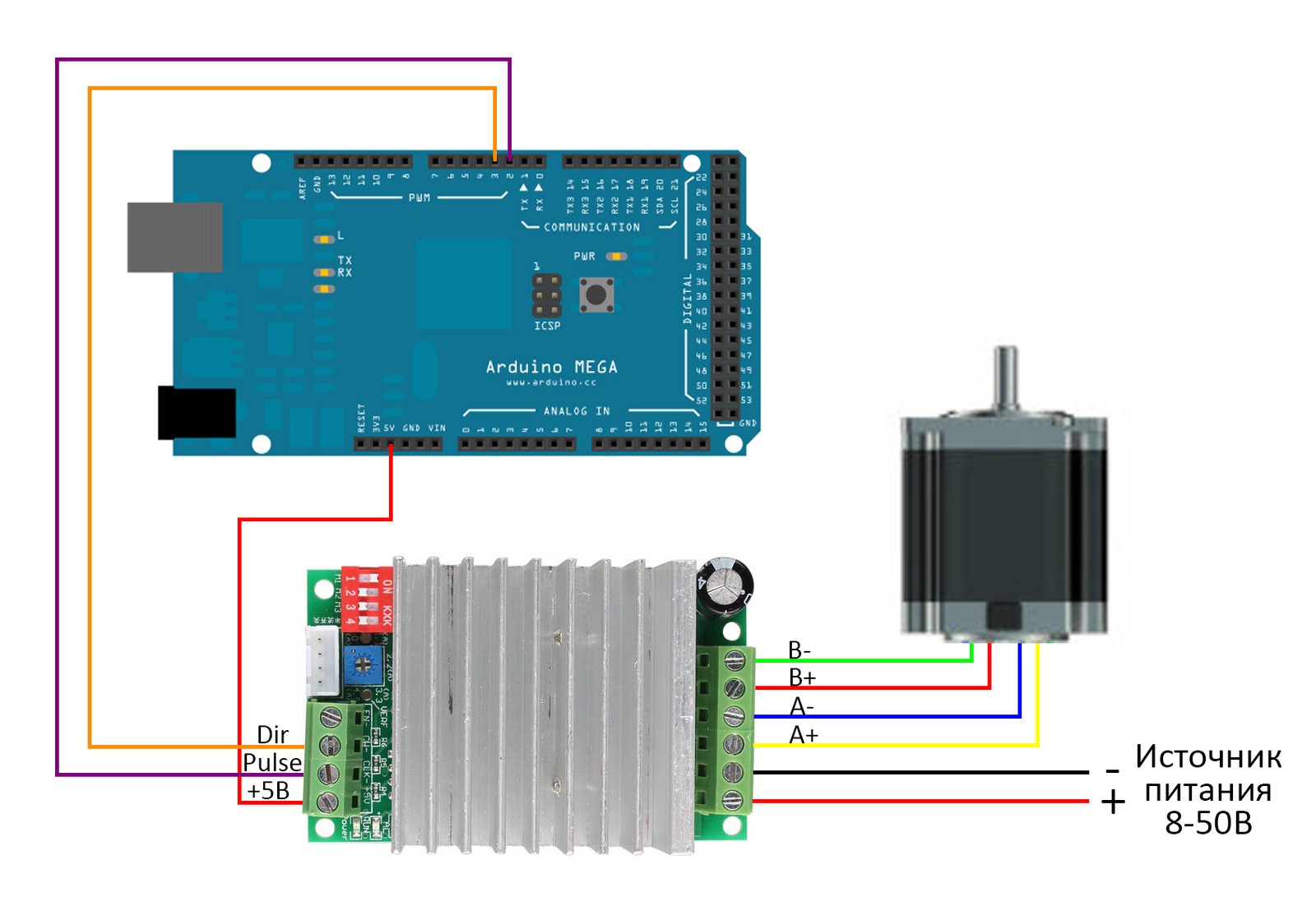
Управление шаговым двигателем с Arduino
Статьи
Устройство для управления роботизированными системами и автоматикой – Arduino – имеет интерфейсы ввода-вывода, а также встроенную программируемую плату. В зависимости от модели Ардуино имеет различное количество устройств ввода-вывода, набор периферии платформы также может отливаться.
Чем больше устройств внешней периферии установлено в составе Ардуины, тем большим функционалом он обладает: USB, Ethernet, GSM, card-reader и другие. Дополнительный аналоговый джойстик позволяет управлять системой более точно. Дополнительная плавность движений организуется при помощи регулировки движения по трем осям.
Дополнительный аналоговый джойстик позволяет управлять системой более точно. Дополнительная плавность движений организуется при помощи регулировки движения по трем осям.
Аппаратно вычислительная платформа Arduino
Программирование модуля производится на языке С++, что дает возможность использовать программирование шагового двигателя с ардуины как профессионалам, так и любителям.
Модуль управления Motor Shield
Отдельный модуль Motor Shield используется в составе Ардуино для управления шаговым двигателем. В зависимости от модели он поддерживает различные типы силовых установок:
- Постоянного тока
- Шаговые двигатели (биполярные и униполярные)
- Сервоприводы
При помощи этого устройства может быть подключено одновременно несколько силовых установок в различных комбинациях. Разные модели Motor Shield используют различные комбинации. Имейте ввиду, что для соединения Arduino и модуля потребуется отдельный переходник, поскольку штатные разъемы не обеспечивают абсолютной совместимости плат.
Микросхема (например L293D) является драйвером. Для управления силовой установки используется одновременно две микросхемы. Защита по напряжению организована посредствам обратных диодов.
Схема имеет силовую и слаботочную цепи питания. Силовая цепь может быть запитана от внешнего источника (6…24В) или от управляющей платы. Для слаботочной цепи предусматривается питание от стабилизированного источника 5В. Подключение внешнего питания осуществляется при установленном джемпере, в обратном случае может возникнуть замыкание.
Увеличить максимальное пороговое напряжение модуля управления с 25 до 36В возможно при помощи использования в составе микросхемы отдельных конденсаторов.
Программное обеспечение для Arduino
Платформа Ардуино уже имеет штатную библиотеку софта, которая находится в библиотеке Hardware. Тем не менее для работы с Motor Shield существуют дополнительные библиотеки, которые в значительно мере упрощают работу, а также предусматривают поддержку дополнительных режимов работы.
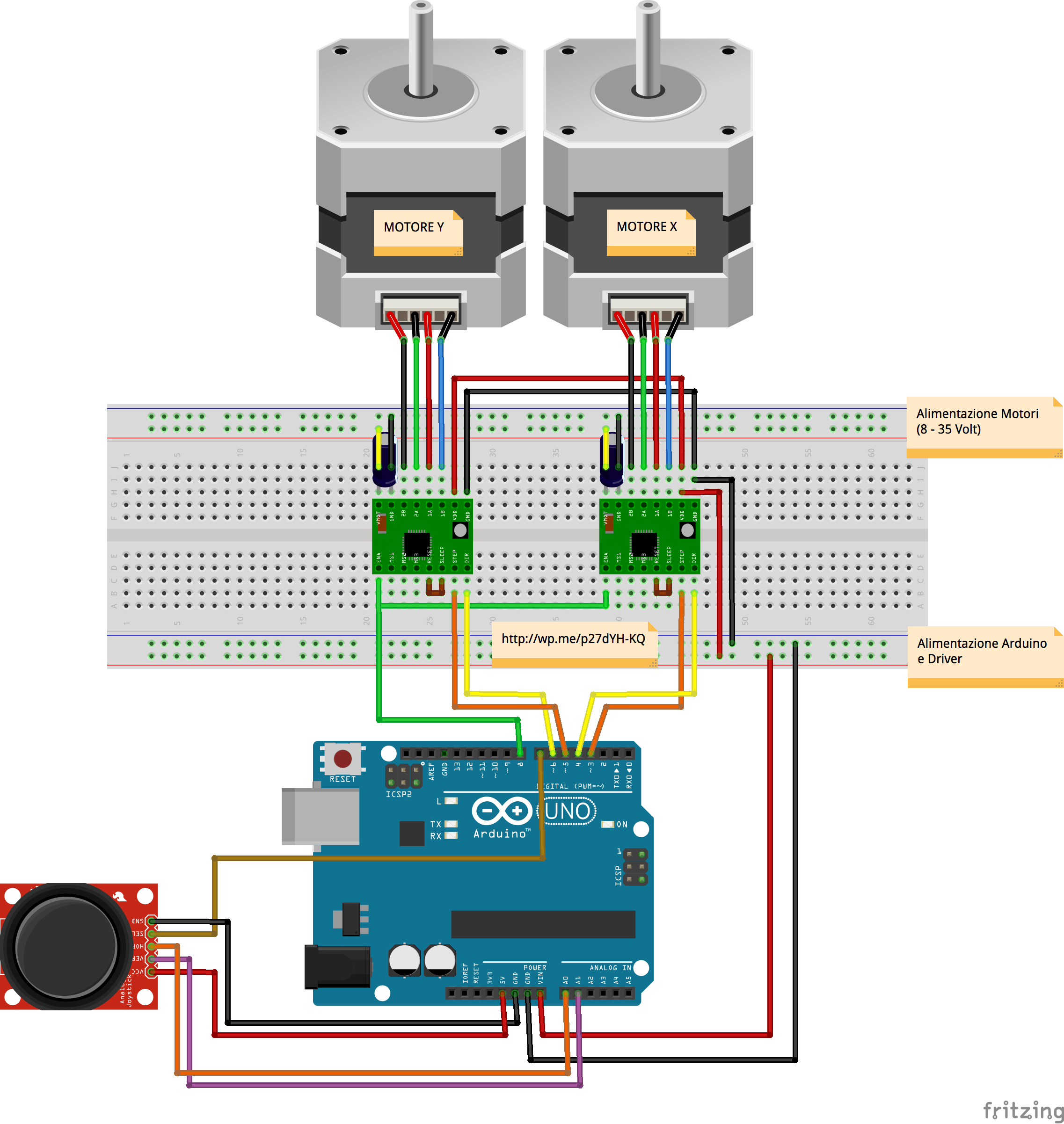
Управление шаговым двигателем постоянного тока с ардуины
Модуль поддерживает одновременную работу с несколькими силовыми установками, которые могут быть использованы в различных устройствах. Отдельная библиотека AFMotor используется для организации работы как шаговых, так и двигателей постоянного тока.
Выводы агрегата подключаются к Motor Shield и электрической цепи модуля GND. Количество шагов на оборот и номер канала задается командой Stepper. В зависимости от использования первых двух или третьего и четвертого канала при программировании используется команда 1 и 2 соответственно.
Скорость вращения ротора задается командой SetSpeed в оборотах в минуту. Используйте частоту вращения, рекомендованную для использующейся вами модели шагового двигателя. В случае программирования показания выше рекомендованного система самостоятельно снизит обороты до максимально возможных.
Индивидуальная настройка движения ротора программируется командой Step и предусматривает следующий функционал:
- Задание часа шагов
- Движение вперед и назад
- Типы шагов: при помощи одной обмотки, с помощью двух обмоток, чередование режима 1 и 2, микрошаг
Отключение силовой установки осуществляется через команду release.
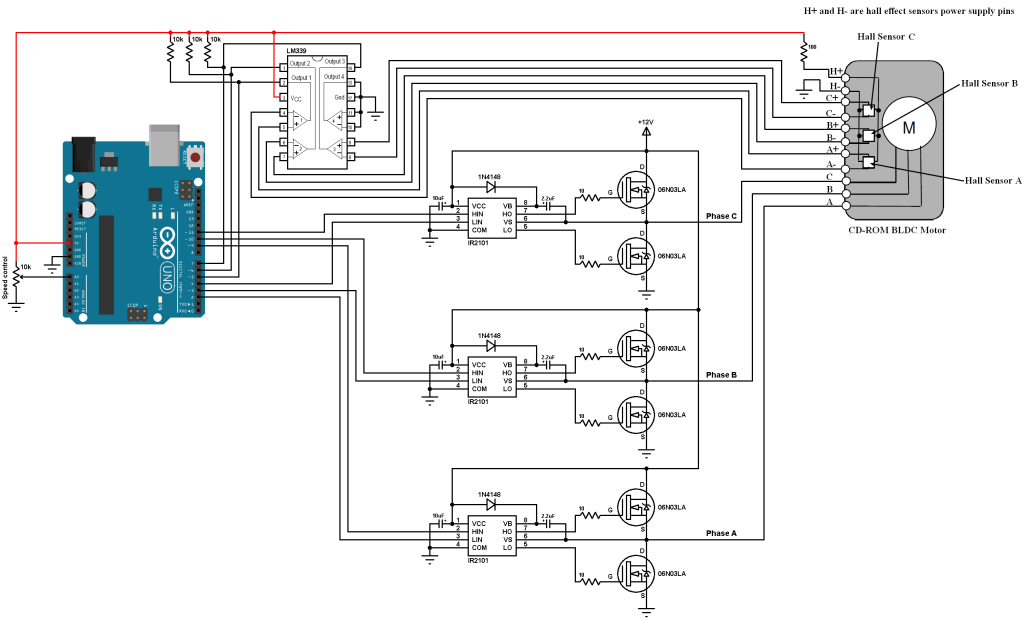
с помощью Arduino Управление шаговым двигателем
с помощью Arduino — это простой проект, в котором биполярный шаговый двигатель управляется с помощью Arduino UNO. Шаговый двигатель — это тип бесщеточного двигателя постоянного тока, который преобразует электрические импульсы в отдельные механические движения, т. е. вал шагового двигателя вращается дискретными шагами. Когда компьютер контролирует эти шаги, мы можем получить точное положение и контроль скорости.
[adsense1]
Из-за дискретного характера пошагового вращения шагового двигателя они часто используются в промышленной автоматизации, системах ЧПУ и т. д., где требуется точное движение.
В этом проекте мы разработали простую систему для управления шаговым двигателем с помощью Arduino. Мы использовали Arduino UNO в качестве основной управляющей части проекта для управления шагами шагового двигателя.
Выберите следующий набор проектов Arduino, которые вы хотите изучить, в Electronicshub : Проекты Arduino »
В следующих разделах приводится краткое введение в шаговые двигатели, схема проекта, а также объясняется работа проекта.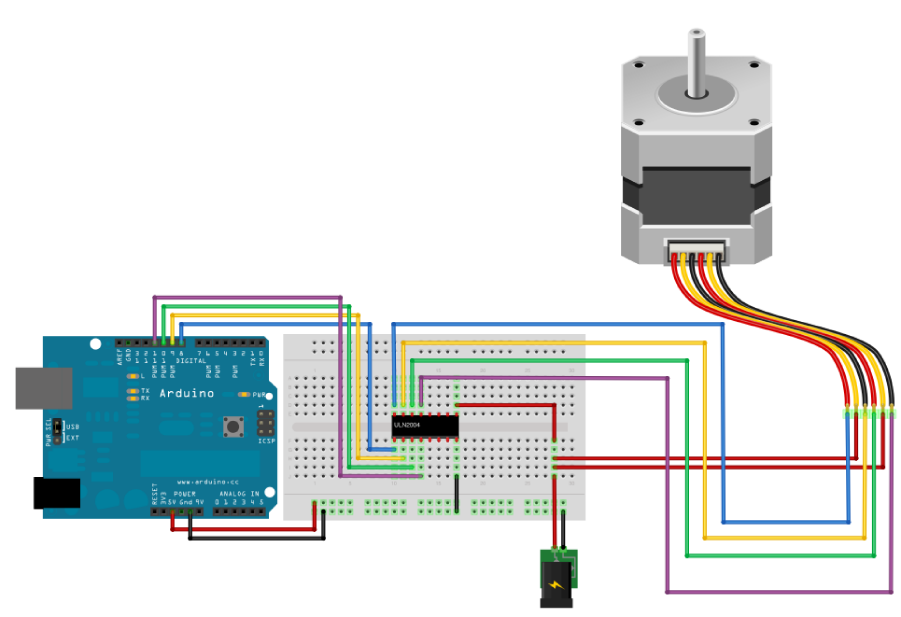 .
.
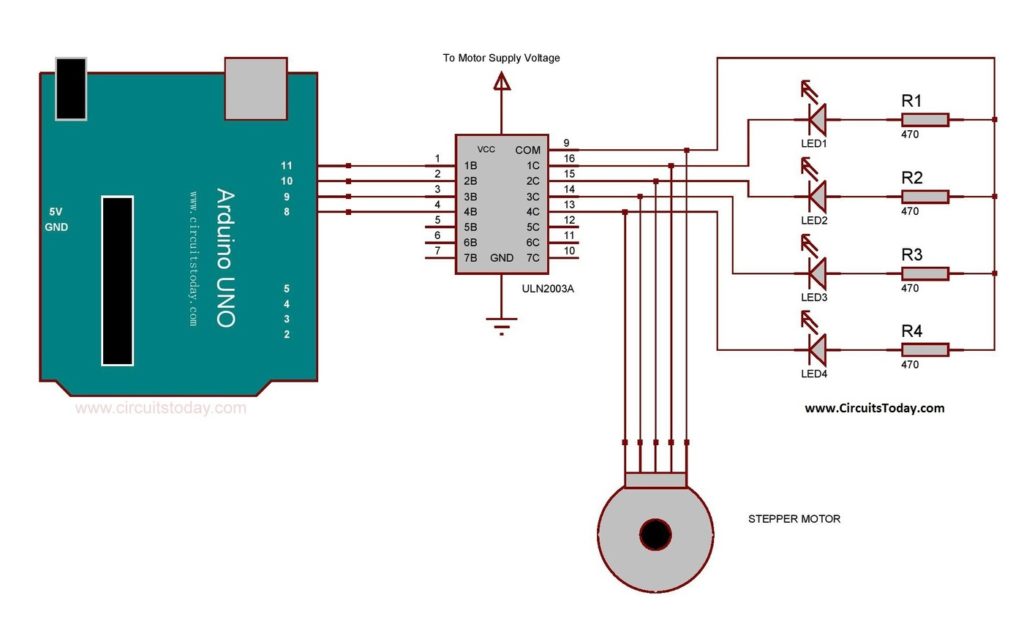
Принципиальная схема управления шаговым двигателем с помощью Arduino Необходимые компоненты
- Arduino UNO [Купить здесь]
- L293D ИС драйвера двигателя [Купить здесь]
- Биполярный шаговый двигатель
- Блок питания (подходит для вашего шагового двигателя)
- Макетная плата (макетная плата)
- Соединительные провода
[adsense2]
Краткое введение в шаговый двигатель
Как упоминалось ранее, шаговый двигатель — это тип двигателя постоянного тока, который вращается дискретными шагами. Благодаря своей уникальной конструкции шаговые двигатели могут управляться для точного позиционирования без какой-либо обратной связи.
Типичный шаговый двигатель имеет несколько катушек, разделенных на фазы. При последовательном включении каждой фазы ротор шагового двигателя вращается ступенчато.
В основном существует три типа шаговых двигателей: шаговые двигатели с переменным сопротивлением (VR), шаговые двигатели с постоянными магнитами (PM) и гибридные шаговые двигатели. В зависимости от обмотки статора шаговые двигатели также можно разделить на биполярные шаговые двигатели и униполярные шаговые двигатели.
В зависимости от обмотки статора шаговые двигатели также можно разделить на биполярные шаговые двигатели и униполярные шаговые двигатели.
Мы не будем вдаваться в подробности о типах шаговых двигателей, но важно определить, является ли ваш шаговый двигатель биполярным или униполярным. Это связано с тем, что метод управления для каждого из этих шаговых двигателей отличается от другого.
Например, схема драйвера униполярного шагового двигателя может быть реализована с помощью простой схемы на основе транзистора или микросхемы транзистора Дарлингтона, такой как ULN2003A. Но в случае биполярного шагового двигателя нам нужно реализовать драйвер H-мостового типа, такой как L29.ИС 3D-драйвера двигателя.
На следующем рисунке показаны биполярный шаговый двигатель, 6-проводной униполярный шаговый двигатель и 5-проводной униполярный шаговый двигатель.
Наиболее распространенный угол шага или количество шагов для шаговых двигателей составляет 1,8 0 или 200 шагов (оба они равны 1,8 0 x 200 = 360 0 ).
Как разработать схему управления шаговым двигателем?
В этом проекте мы использовали биполярный шаговый двигатель. Поэтому мы использовали микросхему драйвера двигателя L29.3D, который представляет собой Н-мостовой драйвер. Поскольку это биполярный шаговый двигатель, нам нужно подключить только 4 провода.
Итак, подключите два провода от одной катушки к выходам 1 и 2 L293D, а два других провода от второй катушки к выходам 3 и 4.
4 входа L293D Motor Diver IC получены от Arduino UNO. Поэтому подключите их к любому из 4 цифровых контактов ввода-вывода (здесь мы подключили их к контактам 2, 3, 4 и 5 Arduino UNO).
Узнайте требования к питанию вашего шагового двигателя и обеспечьте необходимый источник питания. Неправильный источник питания может привести к необратимому повреждению двигателя.
Управление шагами осуществляется с помощью компьютера с использованием последовательного монитора. Итак, убедитесь, что контакты RX и TX Arduino не используются в качестве цифрового ввода-вывода.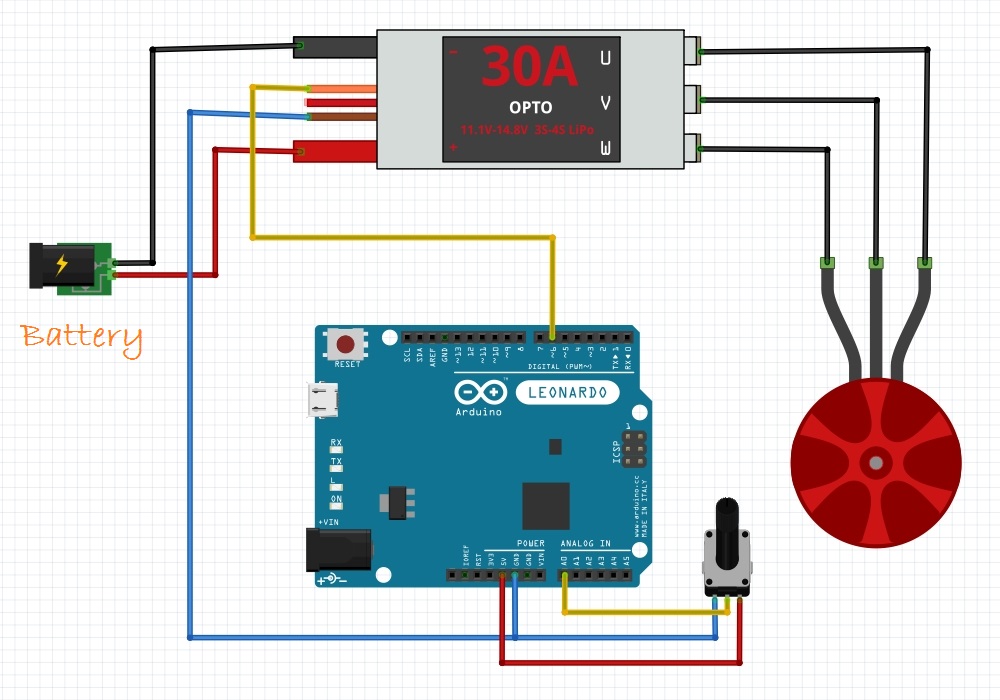 В качестве альтернативы мы можем управлять шагами или вращением двигателя с помощью аналогового входа через потенциометр.
В качестве альтернативы мы можем управлять шагами или вращением двигателя с помощью аналогового входа через потенциометр.
Работа над проектом
В этом проекте разработано простое управление шаговым двигателем с использованием Arduino UNO и ИС драйвера двигателя L293D. Работа проекта объясняется здесь.
Шаговый двигатель, используемый в этом проекте, представляет собой биполярный шаговый двигатель типа PMH (гибридный двигатель с постоянными магнитами). Поскольку это биполярный двигатель, есть только 4 провода, соответствующие концевым клеммам двух катушек. Эти 4 провода подключены к выходным контактам L29.ИС 3D-драйвера двигателя.
Чтобы управлять шаговым двигателем, мы будем использовать метод под названием «Полушаг». Двигатель, используемый в этом проекте, рассчитан на 200 шагов. С однофазным шаговым возбуждением, т. е. подачей питания только на одну фазу за раз, мы можем достичь нормального вращения в 200 шагов с наименьшим энергопотреблением.
Двухфазное шаговое возбуждение — еще один метод, при котором две фазы возбуждаются одновременно.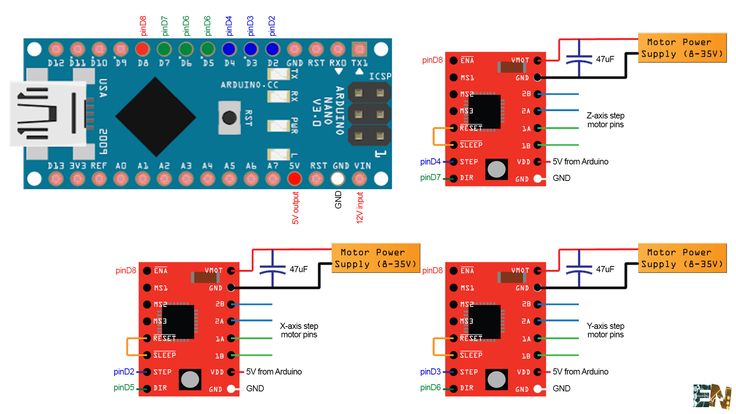 С помощью этой техники количество шагов не отличается от однофазного возбуждения, но крутящий момент и скорость значительно увеличиваются.
С помощью этой техники количество шагов не отличается от однофазного возбуждения, но крутящий момент и скорость значительно увеличиваются.
Но недостатком является то, что требуется вдвое больше энергии. На следующем изображении показана 4-ступенчатая работа однофазного и двухфазного методов возбуждения.
Существует еще одна техника, называемая полушагом. Это комбинация однофазного и двухфазного возбуждения. Количество шагов удваивается, т. е. можно достичь половины угла шага.
Таким образом, с полушагом мы можем получить удвоенное разрешение при более плавной работе. На изображении ниже показан 8-шаговый метод возбуждения «Полушаг».
Как упоминалось ранее, угол шага двигателя, используемого в этом проекте, составляет 1,80, т.е. 200 шагов для возбуждения полного шага. Чтобы увеличить разрешение (удвоить разрешение), мы будем использовать полушаговое возбуждение и добьемся счета в 400 шагов.
Чтобы контролировать шаги, мы будем использовать последовательный монитор.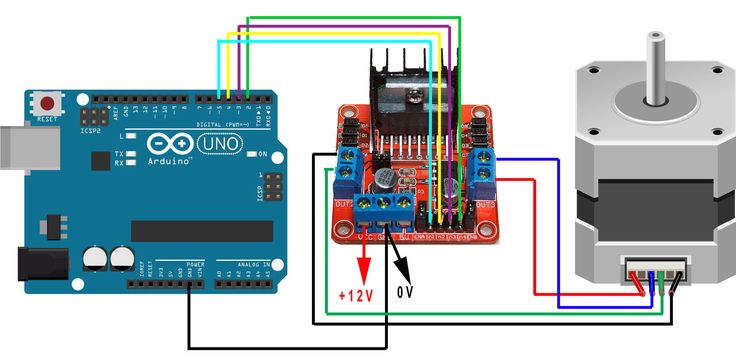 В программе для вращения по часовой стрелке назначается символ «+», а для вращения против часовой стрелки используется знак «–».
В программе для вращения по часовой стрелке назначается символ «+», а для вращения против часовой стрелки используется знак «–».
После выбора направления мы можем напрямую ввести количество шагов в диапазоне от 1 до 400.
Код
Приложения
- Проект демонстрирует работу шагового двигателя и управление шаговым двигателем с помощью Arduino. Шаговые двигатели обычно используются в роботах, станках с ЧПУ, промышленной автоматизации, небольших устройствах, таких как принтеры и т. д.
- Благодаря высокой точности и удерживающему моменту шаговые двигатели используются там, где требуется точное позиционирование.
Видео построения и вывода
Arduino — шаговый двигатель | Учебник по Ардуино
ПРЕДУПРЕЖДЕНИЕ
Это руководство в настоящее время обновляется.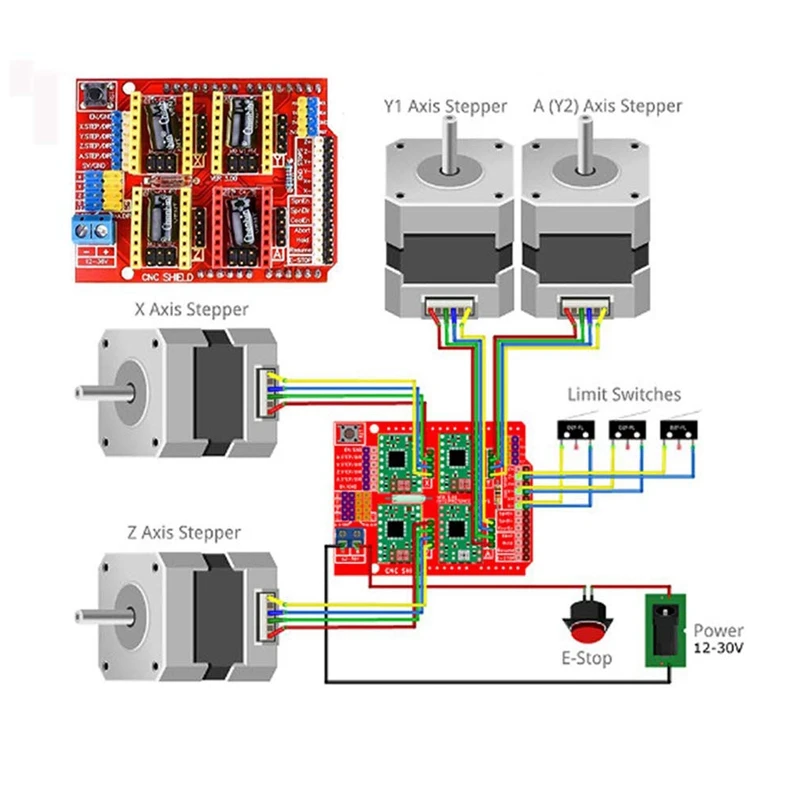
| 1 | × | Arduino UNO or Genuino UNO | |
| 1 | × | USB 2.0 cable type A/B | |
| 1 | × | Arduino Щит двигателя R3 | |
| 1 | × | Шаговый двигатель | |
| 1 | × | (дополнительно) Адаптер питания 9 В для Arduino |
Обратите внимание: это партнерские ссылки. Если вы покупаете компоненты по этим ссылкам, мы можем получить комиссию без каких-либо дополнительных затрат для вас. Мы ценим это.
Существует два типа шаговых двигателей: биполярный шаговый двигатель и униполярный шаговый двигатель. Они отличаются друг от друга внутренним устройством и принципом работы.
Невооруженным глазом они похожи друг на друга. Однако мы можем отличить их по количеству проводов. Биполярный двигатель обычно имеет четыре провода. Униполярный двигатель обычно имеет шесть проводов.
Униполярный двигатель обычно имеет шесть проводов.
Управление биполярным и униполярным шаговым двигателями отличается. К счастью, мы можем управлять униполярным шаговым двигателем, как если бы это был биполярный шаговый двигатель, используя четыре из шести проводов.
Шаговый двигатель требует больше энергии, чем может ему дать плата Arduino, поэтому для него вам понадобится другой блок питания. В идеале в паспорте или руководстве по шаговому двигателю указано напряжение источника питания.
Мы НЕ МОЖЕМ подключить шаговый двигатель напрямую к Arduino. Мы ДОЛЖНЫ подключаться через драйвер двигателя или контроллер двигателя.
Драйвер двигателя и контроллер двигателя могут быть:
-
Чип (например, SN754410)
-
Модуль (например, A4988)
-
Shield (например, Arduino Motor Shield Rev3, контроллер шагового двигателя PES-2605, Adafruit Motor/Stepper/Servo Shield)
Чтобы облегчить работу новичкам, мы рекомендуем использовать один из следующих шилдов:
-
Arduino Motor Shield Rev3: это официальный шилд от Arduino.
-
Контроллер шагового двигателя PES-2605: очень прост в использовании. Кроме того, его библиотека поддерживает различные функции. Он поддерживает метод микрошагов, который обеспечивает плавное движение шагового двигателя. Компания, производящая этот щит, хорошо предоставила документацию и учебные пособия. Однако, чтобы использовать этот щит, нам нужно использовать его вместе с шилдом PHPoC WiFi. Это НЕ добавляет трудностей, но увеличивает стоимость.
Если стоимость для вас не имеет значения, мы рекомендуем использовать контроллер шагового двигателя PES-2605.
Если вам нужно сэкономить, мы рекомендуем использовать Arduino Motor Shield Rev3.
-
Стек Arduino Motor Shield Rev3 на Arduino Uno
-
Подключите шаговый двигатель к Arduino Motor Shield Rev3
Этот образ создан с помощью Fritzing. Нажмите, чтобы увеличить изображение
-
Загрузите или скопируйте приведенный выше код и откройте с помощью Arduino IDE
-
Нажмите кнопку «Загрузить» в Arduino IDE, чтобы загрузить код в Arduino
-
Откройте Serial Monitor, чтобы увидеть результат:
Автопрокрутка Показать временную метку
Очистить вывод
9600 бод
Новая строка
Мы рассматриваем возможность создания видеоуроков. Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
Если вы считаете, что видеоуроки необходимы, подпишитесь на наш канал YouTube , чтобы дать нам мотивацию для создания видео.
НЕ беспокойтесь, если шаговый двигатель вибрирует во время движения. Это характеристика шагового двигателя. Мы можем уменьшить вибрацию, используя метод микрошагового управления.
Кроме того, из-за этой характеристики при правильном управлении шаговый двигатель может издавать музыкальные звуки, как если бы он был музыкальным инструментом. Вы можете увидеть этот проект на Arduino Project Hub.
-
Полный шаг: Единицей перемещения является один шаг, который эквивалентен значению градуса, указанному в техническом описании или руководстве по шаговому двигателю.
-
Полушаг: каждый полный шаг делится на два меньших шага. Единицей перемещения является половина полного шага. Этот метод позволяет двигателю двигаться с двойным разрешением.
-
Микрошаг: каждый полный шаг делит на множество меньших шагов. Единицей перемещения является часть полного шага.
 Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
Дробь может быть 1/4, 1/8, 1/16, 1/32 и даже больше. Этот метод позволяет двигателю двигаться с более высоким разрешением. Это также делает двигатель более плавным на низких скоростях. Чем больше дивиденд, тем выше разрешение и плавнее движение.
Например, если в спецификации двигателя указано 1,8 градуса/шаг:
-
Полный шаг: двигатель может двигаться с шагом 1,8 градуса/шаг <⇒ 200 шагов/оборот
-
Полушаг: Двигатель может двигаться с шагом 0,9 градуса/шаг <⇒ 400 шагов/оборот
-
Микрошаг: Двигатель может двигаться с шагом 0,45, 0,225, 1125, 0,05625 град/шаг <⇒ 800, 1600, 3200, 6400... шагов/оборот
Приведенный выше код использовал полношаговый метод управления.
Это расширенное использование. Новичкам не нужно обращать на это внимание. Это происходит в диапазоне скоростей, в котором скорость шага равна собственной частоте двигателя. Может быть слышно изменение шума двигателя, а также усиление вибрации.