Как устроен электродвигатель переменного тока. Какие бывают типы электродвигателей переменного тока. Как работает асинхронный и синхронный двигатель. Где применяются электродвигатели переменного тока. Каковы преимущества и недостатки двигателей переменного тока.
Принцип работы электродвигателя переменного тока
Электродвигатель переменного тока преобразует электрическую энергию в механическую, используя явление электромагнитной индукции. Его работа основана на взаимодействии вращающегося магнитного поля статора с током, индуцированным в обмотке ротора.
Основные части электродвигателя переменного тока:
- Статор — неподвижная часть с обмотками, создающими вращающееся магнитное поле
- Ротор — подвижная часть, в которой индуцируется ток под действием магнитного поля статора
- Подшипники — обеспечивают вращение ротора
- Корпус — защищает внутренние части двигателя
При подаче переменного тока на обмотки статора создается вращающееся магнитное поле. Оно индуцирует ток в обмотке ротора. Взаимодействие магнитного поля статора с током ротора создает вращающий момент, приводящий ротор в движение.

Типы электродвигателей переменного тока
Существует два основных типа электродвигателей переменного тока:
1. Асинхронные двигатели
В асинхронных двигателях ротор вращается с частотой, меньшей частоты вращения магнитного поля статора. Это обусловлено тем, что ток в роторе индуцируется только при наличии разности скоростей вращения поля статора и ротора.
Особенности асинхронных двигателей:
- Простая и надежная конструкция
- Низкая стоимость
- Высокий КПД (до 95%)
- Сложность регулирования скорости
2. Синхронные двигатели
В синхронных двигателях ротор вращается с той же частотой, что и магнитное поле статора. Это достигается за счет возбуждения ротора постоянным током.
Особенности синхронных двигателей:
- Высокий КПД (до 98%)
- Постоянная скорость вращения
- Возможность работы с высоким коэффициентом мощности
- Сложная конструкция
- Высокая стоимость
Конструкция асинхронного двигателя
Асинхронный двигатель состоит из следующих основных частей:
- Статор — цилиндрический корпус из электротехнической стали с пазами, в которые уложена трехфазная обмотка
- Ротор — вал с насаженным на него сердечником из электротехнической стали
- Короткозамкнутая обмотка ротора («беличья клетка») — алюминиевые или медные стержни, замкнутые по торцам кольцами
- Подшипниковые щиты
- Вентилятор охлаждения
- Клеммная коробка для подключения обмоток
Принцип работы асинхронного двигателя
Работа асинхронного двигателя происходит следующим образом:

- При подаче трехфазного напряжения на обмотку статора создается вращающееся магнитное поле
- Магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС
- Под действием ЭДС в обмотке ротора возникают токи
- Взаимодействие токов ротора с магнитным полем статора создает вращающий момент
- Ротор начинает вращаться в направлении вращения магнитного поля статора
Скорость вращения ротора всегда меньше скорости вращения магнитного поля статора. Разность этих скоростей называется скольжением.
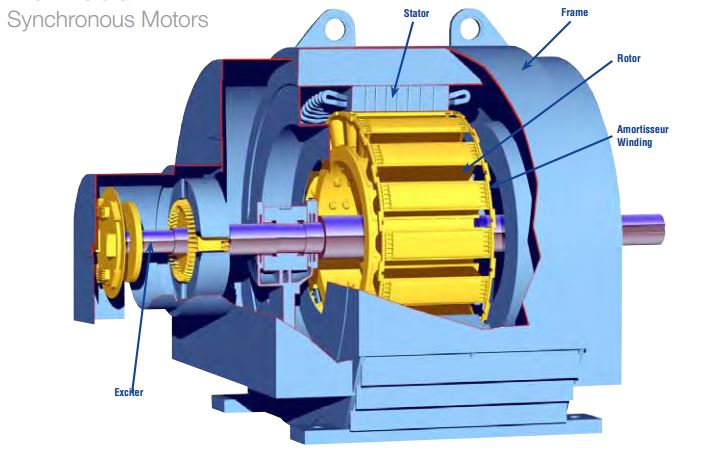
Конструкция синхронного двигателя
Синхронный двигатель имеет следующую конструкцию:
- Статор — аналогичен статору асинхронного двигателя
- Ротор — электромагнит, питаемый постоянным током
- Контактные кольца — для подвода постоянного тока к обмотке ротора
- Щетки — для съема тока с контактных колец
- Возбудитель — источник постоянного тока для питания обмотки ротора
Принцип работы синхронного двигателя
Синхронный двигатель работает следующим образом:
- На обмотку статора подается трехфазное напряжение, создающее вращающееся магнитное поле
- На обмотку ротора подается постоянный ток, создающий неподвижное относительно ротора магнитное поле
- Магнитные полюса ротора притягиваются к разноименным полюсам вращающегося поля статора
- Ротор начинает вращаться синхронно с магнитным полем статора
Скорость вращения ротора всегда равна скорости вращения магнитного поля статора.

Применение электродвигателей переменного тока
Электродвигатели переменного тока широко применяются в различных отраслях:
- Промышленность — приводы станков, насосов, вентиляторов, конвейеров
- Транспорт — тяговые двигатели электровозов, трамваев, троллейбусов
- Сельское хозяйство — привод сельхозмашин, насосов, вентиляторов
- Строительство — подъемные краны, бетономешалки
- Бытовая техника — стиральные машины, пылесосы, кухонные комбайны
Преимущества и недостатки электродвигателей переменного тока
- Высокий КПД (до 95-98%)
- Простота конструкции (особенно у асинхронных)
- Надежность и долговечность
- Низкая стоимость (асинхронные двигатели)
- Возможность работы напрямую от сети переменного тока
Недостатки:
- Сложность регулирования скорости (особенно у асинхронных)
- Низкий пусковой момент (у асинхронных)
- Потребление реактивной мощности
- Сложность реверса (изменения направления вращения)
Подключение электродвигателей переменного тока
Электродвигатели переменного тока могут подключаться к однофазной и трехфазной сети:
Подключение к однофазной сети
Однофазные двигатели имеют две обмотки — рабочую и пусковую. Для создания вращающегося магнитного поля пусковая обмотка подключается через фазосдвигающий конденсатор.
Подключение к трехфазной сети
Трехфазные двигатели подключаются напрямую к трехфазной сети. Обмотки статора могут соединяться по схеме «звезда» или «треугольник» в зависимости от напряжения сети.
При подключении важно правильно выбрать схему соединения обмоток и обеспечить защиту двигателя от перегрузок и коротких замыканий.
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
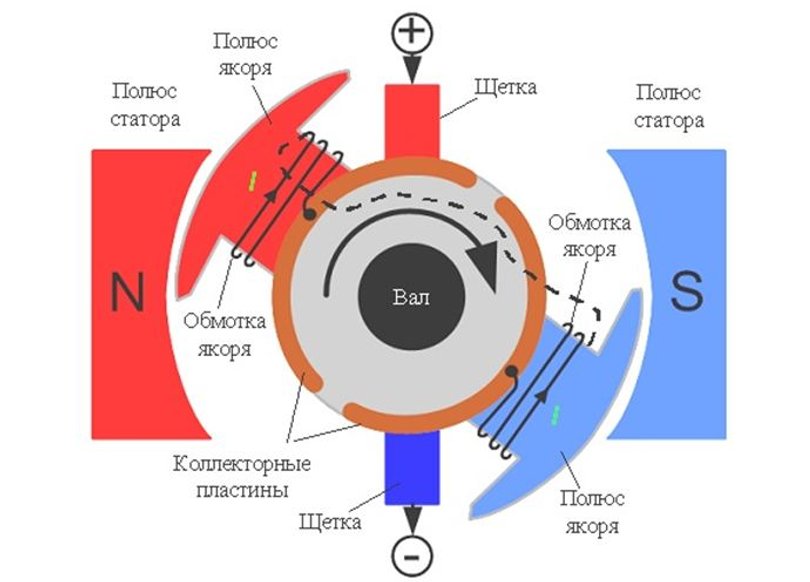
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя.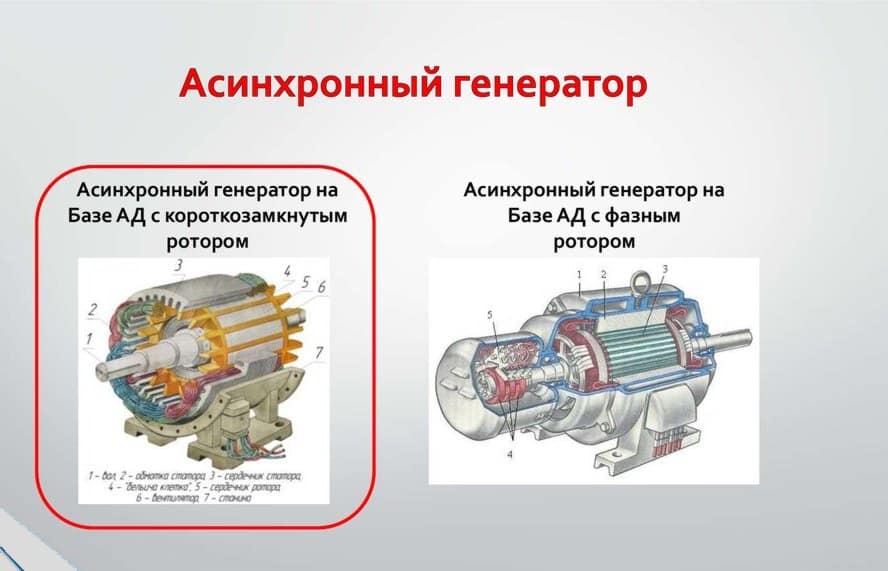
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.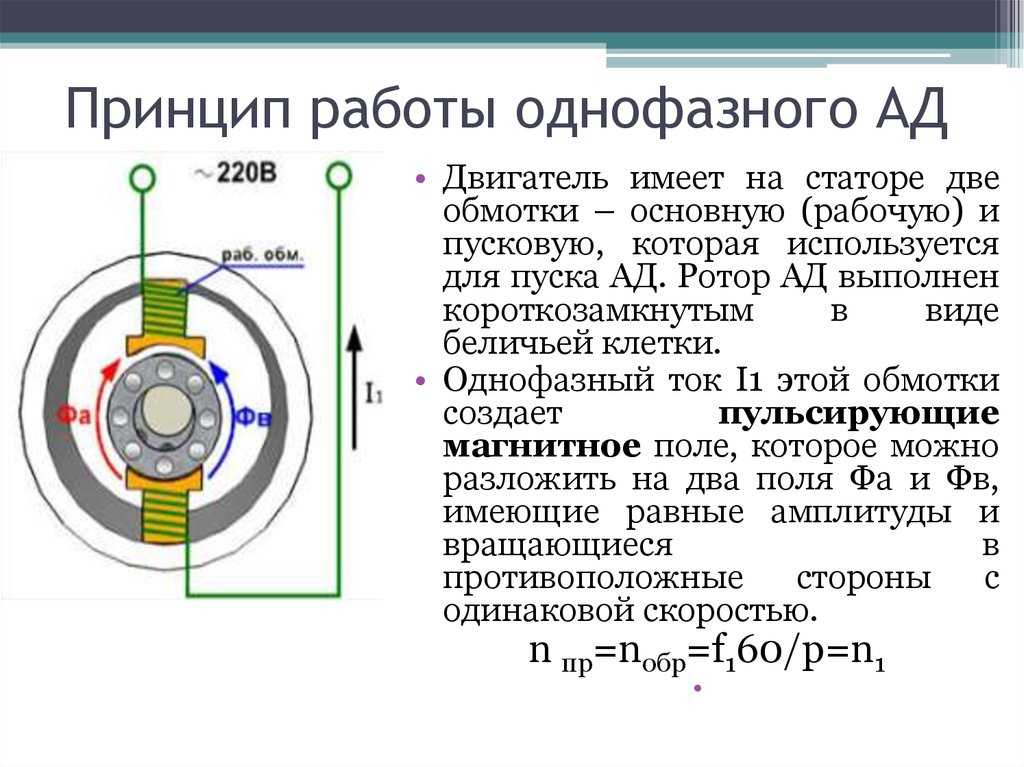
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принцип работы и устройство электродвигателя
Принцип работы электродвигателя
Рубрики статей
- Все
- Новости и новинки
- Новости компании
- Обзоры продукции
Отредактировано: 14. 01.2022
01.2022
Электродвигатели преобразуют электрическую энергию в механическую. Таким образом, электрические двигатели противоположны генераторам, которые преобразуют механическое движение в электрическую энергию. Существует множество различных типов и конструкций электродвигателей. Однако все электродвигатели основаны на сходном принципе работы.
Объяснение магнитных полей и силы Лоренца
Электродвигатель использует важнейшую силу природы — силу Лоренца. Как это работает и почему электродвигатель может это сделать, мы сначала объясним вам на основе упрощенных основ, прежде чем мы перейдем к конструкции.
Каждый магнит имеет два полюса: северный и южный. Магнитные силы всегда действуют с севера на юг и воздействуют на так называемые ферромагнитные материалы (кобальт, железо, никель). Твердые тела, такие как железо, всегда притягиваются к магниту. Однако, если есть два магнита, случается следующее: одни и те же полюса отталкиваются друг от друга (южный и южный, северный и северный полюса) — разные полюса притягиваются (южный и северный).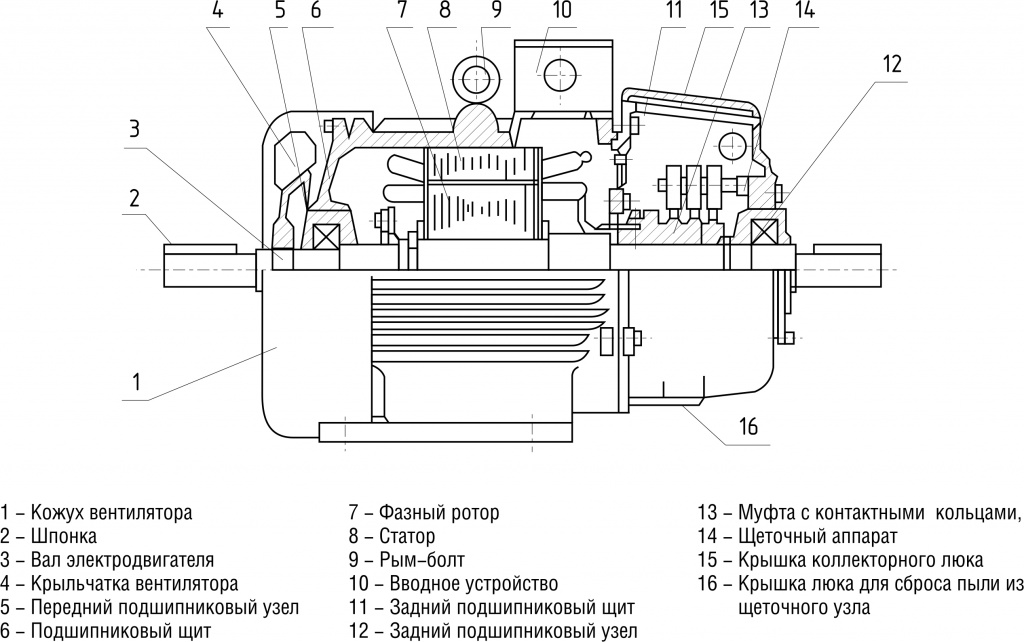
Электричество также имеет два разных полюса. Здесь есть плюс и минус. Это называется электрическим зарядом . Плюс означает, что частица имеет положительный заряд. Минус означает, что частица имеет отрицательный заряд.
Воздействие на заряд (плюс или минус) в магнитном поле называется силой Лоренца. Проще говоря, северный магнитный полюс отталкивает положительный заряд и притягивает отрицательный. Южный магнитный полюс притягивает положительный заряд и отталкивает отрицательный. Каждый электродвигатель основан на этом принципе. Он использует магнитное воздействие постоянного магнита на электромагнит (который находится под напряжением и имеет заряд).
Устройство и функции двигателя
Так называемый статор расположен под корпусом электродвигателя. Он состоит из стабильного магнитного поля (постоянный магнит). Это означает, что северный и южный полюса имеют фиксированное положение и не меняются. Ротор (лат. rotare = крутить) находится в самом двигателе, прикреплен к валу и поэтому может вращаться. Его электрическое магнитное поле постоянно меняется: северный и южный полюса меняются местами. Ротор окружен статором. Якорь представляет собой железный сердечник ротора. На него намотаны катушки ротора, по которым течет ток. С помощью этих катушек создается изменяющееся магнитное поле. Если якорь представляет собой постоянный магнит, то катушек нет.
Его электрическое магнитное поле постоянно меняется: северный и южный полюса меняются местами. Ротор окружен статором. Якорь представляет собой железный сердечник ротора. На него намотаны катушки ротора, по которым течет ток. С помощью этих катушек создается изменяющееся магнитное поле. Если якорь представляет собой постоянный магнит, то катушек нет.
Коммутатор (также называемый переключателем полюсов) сидит на валу ротора. Ток течет через него. Его задача — повернуть магнитное поле ротора и, таким образом, поменять местами полюса. Это всегда происходит при достижении определенного положения. К коммутатору присоединены скользящие контакты, питающие ротор электричеством. Если электродвигатель теперь находится под напряжением, в роторе создается магнитное поле. Только тогда он становится вращающимся электромагнитом.
По описанному выше принципу, что одноименные полюса всегда отталкиваются друг от друга, ротор начинает вращаться. Электромагнитное поле ротора всегда регулируется коммутатором таким образом, что северный полюс ротора и северный полюс статора (аналогично южному полюсу) обращены друг к другу. Проще говоря, через каждые пол-оборота меняется полярность ротора. В противном случае северный полюс и южный полюс были бы обращены друг к другу, и двигатель остановился бы.
Проще говоря, через каждые пол-оборота меняется полярность ротора. В противном случае северный полюс и южный полюс были бы обращены друг к другу, и двигатель остановился бы.
Существует также вариант электродвигателя без коммутатора. В двигателях переменного тока магнитное поле изменяется в соответствии со скоростью вращения ротора. Одни и те же полюса «автоматически» обращены друг к другу. В этом случае структура немного отличается. Тем не менее, основные части остаются.
Разновидности электродвигателей
На данный момент используют большое количество электродвигателей, которые отличаются конструкцией. В основном их делят по двум характеристикам.
Принцип электропитания:
- Переменного тока, когда двигатель работает, получая питание непосредственно от электросети.
- Постоянного тока, когда двигатель работает от источника постоянного тока (батареек, аккумуляторов и т.п.).
Принцип работы:
- Синхронный, вращение происходит в синхронизации с магнитным полем, вызывающим движение.
 У таких двигателей есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
У таких двигателей есть обмотки на роторе и щеточный механизм для подачи на них электрического тока. - Асинхронный, вращающийся ротор движется медленнее вращающегося магнитного поля в статоре. В таком двигателе нет щеток и обмоток на роторе, и он является одним из самых распространенных, что объясняется его простотой.
Если стоит выбор, где купить электродвигатель, выбирайте надёжного поставщика. Компания «АнЛан» занимает лидирующие позиции на рынке РФ с 2007 года. Разумная цена и европейское качество — то, что отличает продукцию компании от других организаций.
Копирование контента с сайта Anlan.ru возможно только при указании ссылки на источник.
© Все права защищены.
Рекомендуемые статьи
Компоненты структурированных кабельных систем СКС
24
March
2008
Российский рынок структурированных проводных систем является одним из самых конкурентоспособных отделов индустрии информационных технологий.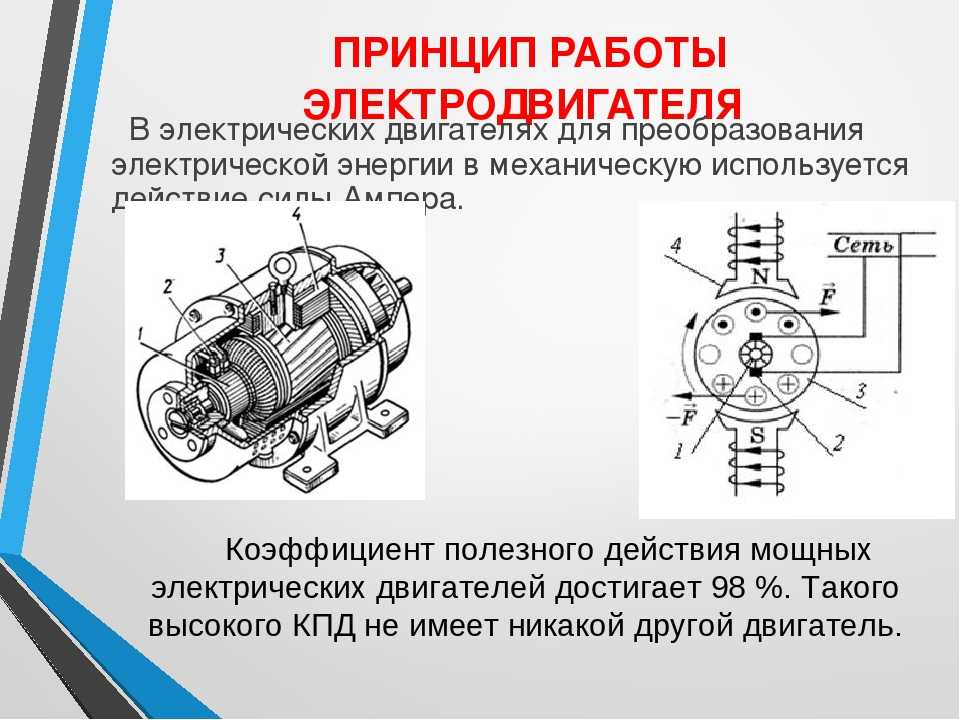
Открыть
Камеры видеонаблюдения и видеорегистраторы RVI
14
April
2021
В наш каталог добавлены камеры видеонаблюдения и видеорегистраторы RVI.
Открыть
Забивка кабелей – специальные инструменты
21
September
2015
Краткое содержание:
- Для чего нужна заделка?
- Универсальные наборы для заделки
Статья ознакомит вас с заделочными инструментами и специальными наборами инструментов.
Открыть
Новинка — полиамидные трубы, соответствующие директиве RoHS
09
March
2021
Компания ДКС выпустила новую серию полиамидных труб категории HB, соответствующих директиве RoHS. Трубы устойчивы к воздействию агрессивных веществ и вибрационным нагрузкам, они выдерживают даже суровые условия эксплуатации.
Открыть
Как работают и какие бывают сетевые коммутаторы
22
October
2021
Сети стали неотъемлемой частью многих сфер нашей жизни — будь то корпоративный контекст, цифровая коммуникация или вечер кино на диване у себя дома. Основным компонентом является сетевой коммутатор, который объединяет соответствующие устройства и, таким образом, поддерживает совместное использование ресурсов.
Основным компонентом является сетевой коммутатор, который объединяет соответствующие устройства и, таким образом, поддерживает совместное использование ресурсов.
Открыть
Как выбрать жесткий диск для систем видеонаблюдения?
17
December
2021
С ростом количества камер и видеопотоков с все более высоким разрешением, требования к используемым решениям для хранения данных возрастают. Поэтому производители жестких дисков предлагают специальные жесткие диски для видеонаблюдения.
Открыть
Рекомендуемые товары
IEK DRV056-A4-000-1-1510 Электродвигатель АИР DRIVE 3ф 56A4 380В 0.12кВт 1500об/мин 1081
IEK DRV056-A4-000-1-1510 Электродвигатель АИР DRIVE 3ф 56A4 380В 0.12кВт 1500об/мин 1081
Артикул: DRV056-A4-000-1-1510
Цена: 7 392,23 ₽
От 25 000 ₽ 7 392,23 ₽
От 100 000 ₽ 7 392,23 ₽
IEK DRV071-A8-000-2-0720 Электродвигатель АИР DRIVE 3ф 71A8 380В 0. 18кВт 750об/мин 2081
18кВт 750об/мин 2081
IEK DRV071-A8-000-2-0720 Электродвигатель АИР DRIVE 3ф 71A8 380В 0.18кВт 750об/мин 2081
Артикул: DRV071-A8-000-2-0720
Цена: 12 803,72 ₽
От 25 000 ₽ 12 803,72 ₽
От 100 000 ₽ 12 803,72 ₽
IEK DRV112-M4-005-5-1520 Электродвигатель АИР DRIVE 3ф 112M4 380В 5.5кВт 1500об/мин 2081
IEK DRV112-M4-005-5-1520 Электродвигатель АИР DRIVE 3ф 112M4 380В 5.5кВт 1500об/мин 2081
Артикул: DRV112-M4-005-5-1520
Цена: 41 180,65 ₽
От 25 000 ₽ 41 180,65 ₽
От 100 000 ₽ 41 180,65 ₽
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:
- Принцип преобразования энергии
- Виды двигателей и их устройство
- Асинхронные
- Синхронные
- История изобретения
- Подключение к однофазным и трехфазным источникам питания
- Преимущества и недостатки электрических двигателей переменного тока
- Применение
Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля.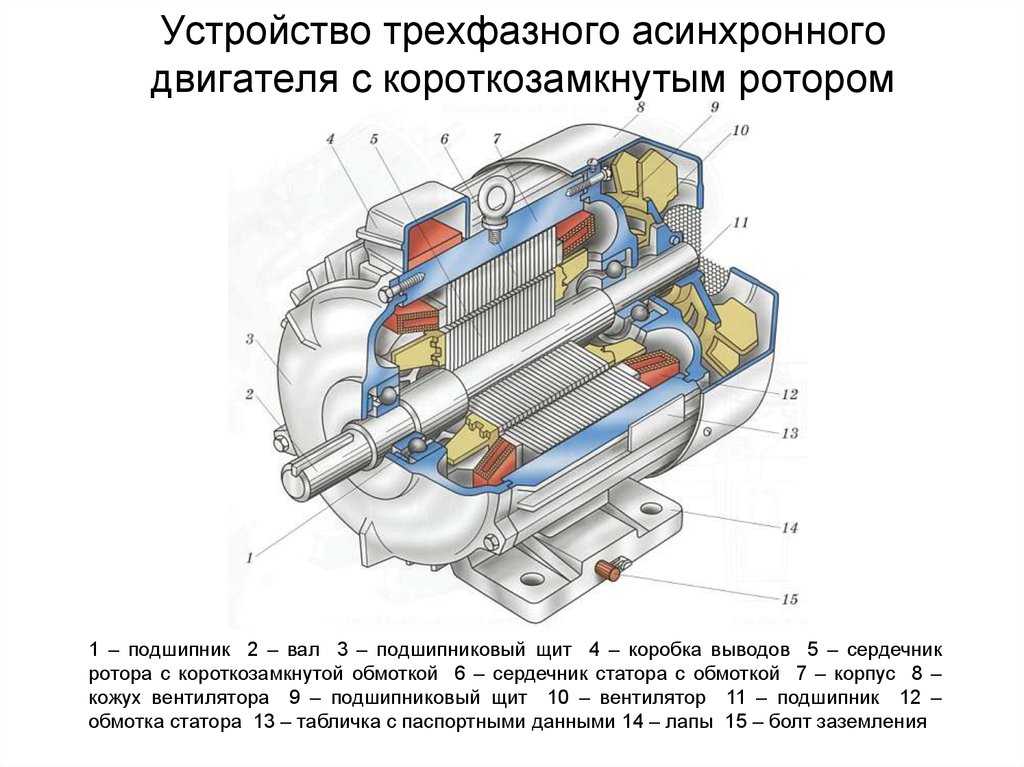 По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора.
 Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов).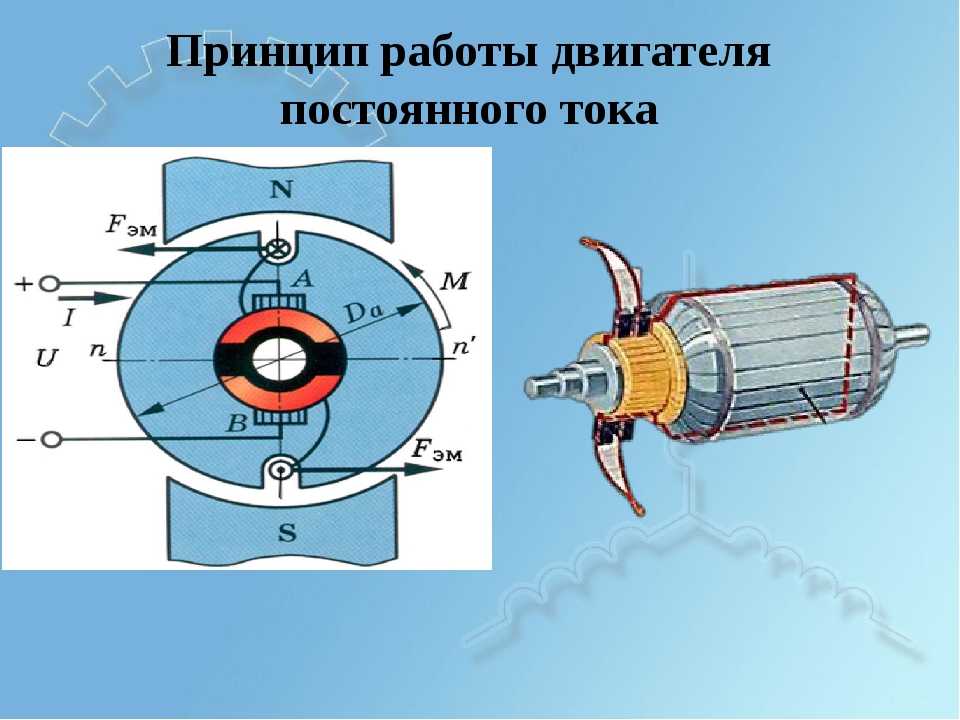 Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток.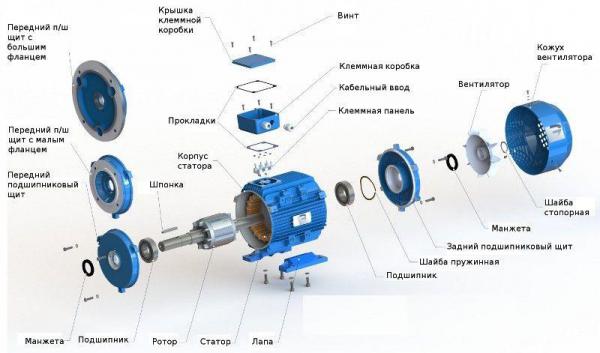 Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией.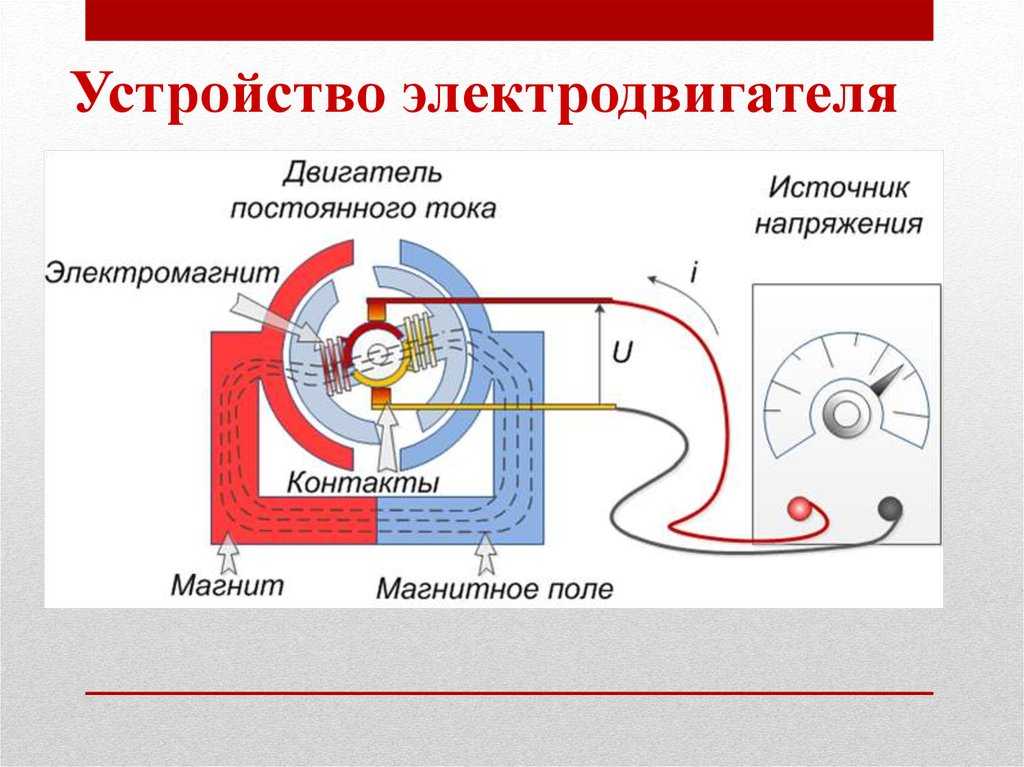 Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Устройство и принцип работы электродвигателя переменного тока
Содержание
- 1 Электрические двигатели: разновидности
- 1.1 Коллекторные двигатели
- 1.2 Асинхронные двигатели
- 1.3 Синхронные двигатели
- 2 Как работают электрические двигатели
- 2.1 Асинхронные двигатели
- 3 Работа синхронных двигателей
Двигатели электрические выпускают синхронные, асинхронные, коллекторные, каждому присущи особенности работы. Минус большой: сеть интернет дает скудные представления о различиях в работе, принципе действия. Можем читать обзоры про синхронные электродвигатели, не понять в итоге главного: нюансов! Почему на ГЭС используются такие генераторы, в быту моторов-зеркал не видно (двигатель переменного тока обратим)?
Электрические двигатели: разновидности
Сразу скажем, не ставили целью довести вниманию читателей исчерпывающую информацию по указанной теме.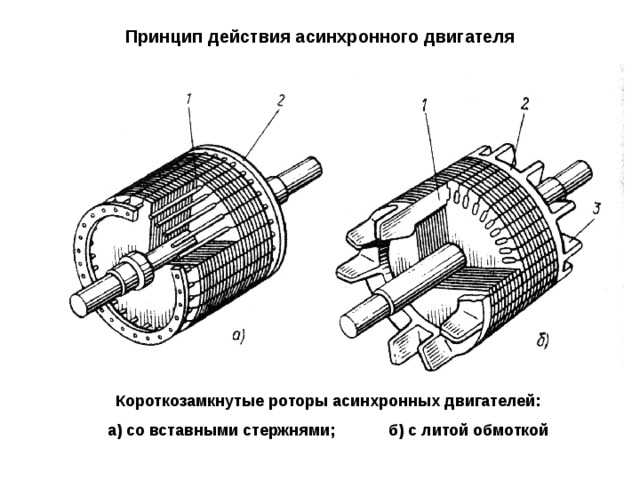 Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Невозможно объять необъятное. Будут рассматриваться случаи, опущенные литературой. Информация вроде выложен, систематизировать издателям недосуг. Поможем понять, как функционируют виды электродвигателей. Начнем простым перечислением.
Двигатель коллекторного типа
Коллекторные двигатели
Часто путают с синхронными. Обнаруживаются угольные щетки. Этим сходство ограничивается, частота вращения коллекторных двигателей меняется в широких пределах, каждый может лицезреть на примере стиральной машины. Управление скоростью осуществляется путем коммутации обмоток, подстройкой значения действующего напряжения (изменяется угол отсечки вольтажа промышленной частоты).
Главным отличием устройств является наличие коллектора. Своеобразная секционная конструкция, насаженная на вал. Составлена множеством катушек, равномерно идущих кругом. Коллектор обеспечивает последовательную коммутацию, чтобы поле постепенно двигалось вкруг вала. Цепляясь за статор, ротор начинает движение.
К недостаткам коллекторных двигателей причисляют хрупкость (для промышленности). В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
В быту тип устройств доминирующие. Простым путем осуществляется регулировка скорости (отсечкой части периода синусоиды). Коллекторных двигателей видим другие минусы/плюсы, упоминали ранее, сейчас изучим особенности. Наличие на валу секционированного барабана.
Можно поставить вместо него магнит, вращать поле статора? Да, получим синхронный двигатель (типичный пример – помпы стиральных машин). Можно питать обмотку постоянным током, вращать поле статора? Да, будет синхронный двигатель. Видите, коллектор однозначно дает понять тип устройства.
Асинхронные двигатели
Чаще применяются промышленностью. Получаем простоту конструкции, кучу плюшек. Ударопрочность, вибропрочность: отсутствие угольных щеток. Взамен получается кипа конструкций. Семейство самое многочисленное.
Асинхронный двигатель
Во-первых, ротор. Может быть короткозамкнутым, фазным. Первое означает: на вал насажена конструкция (для уменьшения веса силуминовая), где вставлены прожилки меди. Закорочено периметром двумя кольцами. Получается барабан, иногда называемый беличьей клеткой.
Получается барабан, иногда называемый беличьей клеткой.
Возникает поле под действием вращающейся ЭДС статора, в отличие от коллекторных запуск асинхронных двигателей постоянным током не производят. Вторичное отличие. Первичное назвали: к ротору не подходят контакты (исключая пусковой реостат), вал увенчан беличьей клеткой, вывод о принадлежности однозначный. Что касается фазных асинхронных машин, питание катушек ротора производится через токосъемные кольца. Вал подхватывается, постепенно набирает обороты.
Синхронные двигатели
Тип устройств, составить понятие о котором, согласно заметкам сети попросту невозможно. Отличие простое: поле настолько сильное, что захватывается без проблем, не проскальзывает, как в случае с асинхронными или (в меньшей степени) коллекторными двигателями. Обеспечивается постоянным магнитом чаще, либо обмотка возбуждения находится на роторе. Статор снабжается переменным напряжением нужной частоты.
Скорость вращения зависит от частоты сети питания. Полюсов только два, поэтому составляет 25 Гц (1500 об/мин). Черта, по которой можно предположить: видим синхронный двигатель – кратное, целое число. Ключевым является совпадение скорости вращения вала и частоты напряжения питания. Многое зависит от количества полюсов. Например, на ГЭС генераторы работают на частоте вала 1-2 Гц, промышленные 50 Гц получаются путем намотки многочисленных катушек статора, соединенных параллельно.
Как работают электрические двигатели
Асинхронные двигатели
Кратенько описали внешние отличия электрических двигателей, теперь пара слов по поводу устройства и функционирования. Асинхронные двигатели при помощи статора создают по оси вращающееся магнитное поле. Барабан беличьей клетки редко изготавливается из ферромагнитных материалов (если вообще имеет место быть). В противном случае нагрев вышел бы значительным. Фактически получается индукционная печь.
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки. Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных. Англичане делают проще – зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:
Работа двигателя переменного тока
- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.

- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Регулирование частоты напряжения питания.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов.
 Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.
Двигатель асинхронного типа
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели – генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода.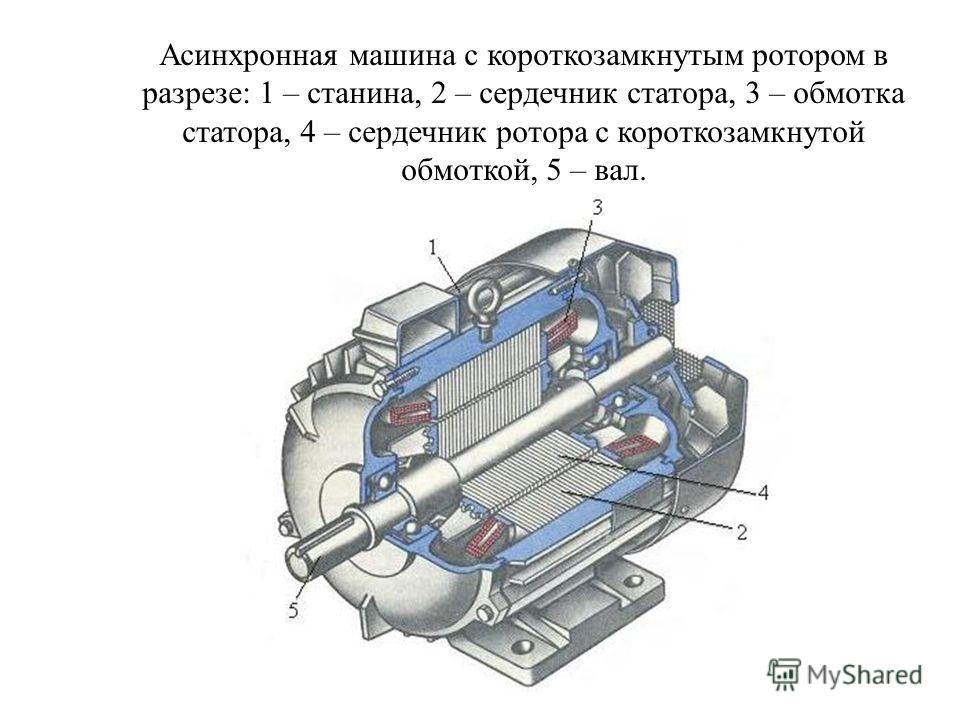 А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности – увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
как он устроен и работает
Электрический двигатель представляет собой особый преобразователь.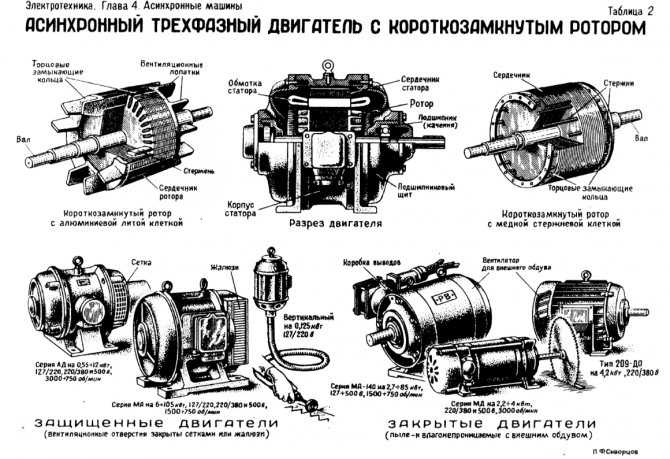 Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции. Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
Это машина, где электрическая энергия преобразуется и переходит в механическую. Принцип действия двигателя основан на электромагнитной индукции. Есть к тому же и электростатические двигатели. Можно без особых дополнений использовать двигатели на других принципах преобразования электричества в перемещении. Но немногие знают, как устроен и как работает электродвигатель.
- Принцип работы устройства
- Работа трехфазного асинхронного двигателя
- Современная классификация
- Основные особенности
- Агрегаты пульсирующего тока
- Модификации переменного тока
- Универсальное коллекторное оборудование
Принцип работы устройства
В составе электродвигателя переменного тока присутствуют неподвижные и подвижные части. К первым относят:
- статор;
- индуктор.
Статор находит применение для машин синхронного и асинхронного типа. Индуктор эксплуатируется в машинах постоянного тока. Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Подвижная часть состоит из ротора и якоря. Первый применяют для синхронных и асинхронных устройств, тогда как якорь используется для оборудования с постоянными показателями. Функция индуктора лежит на двигателях небольшой мощности. Здесь нередко используют постоянные магниты.
Говоря о том, как устроен электродвигатель, необходимо определить, к какому классу оборудования относится конкретная модель. В конструкции асинхронного двигателя ротор бывает:
- короткозамкнутым;
- фазным, то есть с обмоткой.
Последний тип используется, если требуется уменьшить пусковой ток и отрегулировать частоту вращения асинхронного электродвигателя. Обычно речь идет о крановых электродвигателях, повсеместно используемых в крановых установках.
Кран обладает подвижностью и применяется в машинах постоянного тока. Это может быть генератор либо двигатель, а также универсальный двигатель, функционирующие по тому же принципу. Его используют в электроинструменте.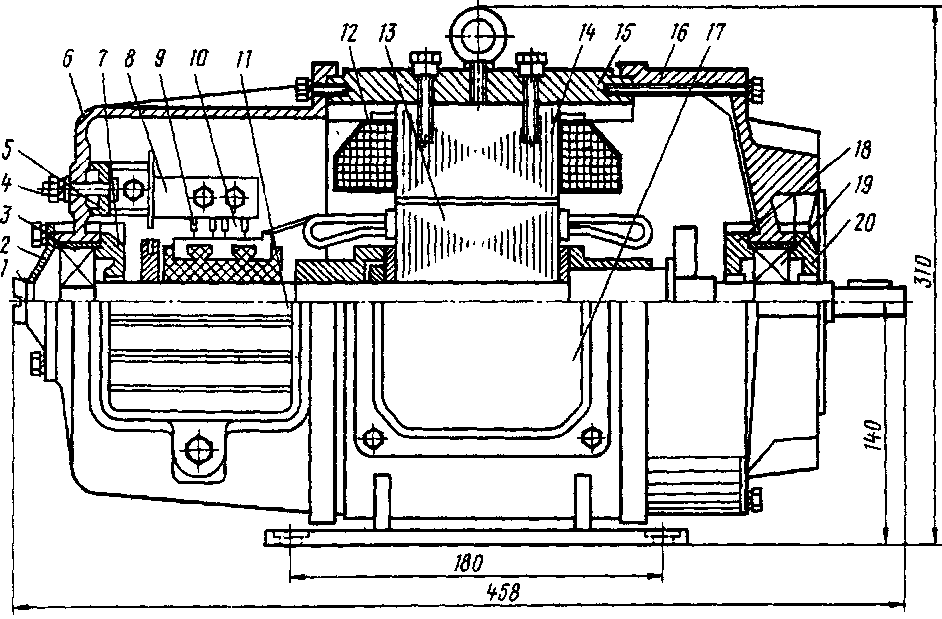 Фактически универсальный двигатель — это тот же двигатель с постоянными показателями, в котором происходит последовательное возбуждение. Отличие касается лишь расчётов обмоток. Здесь отсутствует реактивное сопротивление. Оно бывает:
Фактически универсальный двигатель — это тот же двигатель с постоянными показателями, в котором происходит последовательное возбуждение. Отличие касается лишь расчётов обмоток. Здесь отсутствует реактивное сопротивление. Оно бывает:
- емкостным;
- индуктивным.
Вот почему любой электроинструмент, если из него извлекается электронный блок, сможет работать и на постоянном токе. Но при этом напряжение в сети будет меньше. Принцип действия электродвигателя определяется сообразно тому, из каких компонентов он состоит и для каких целей предназначается.
Работа трехфазного асинхронного двигателя
Во время включения в сеть формируется вращающееся магнитное поле. Оно отмечается в статоре и проникает через короткозамкнутую обмотку ротора. В ней переходит в индукцию. После этого, в соответствии с законом Ампера, ротор начинает вращаться. Частота перемещения этого элемента зависит от частоты питающего напряжения и количества магнитных полюсов, представленных парами.
Разность между частотой вращения ротора и магнитного поля статора выражается в виде скольжения. Двигатель именуют асинхронным, потому что частота вращения магнитного поля у него сообразна с частотой вращения ротора. Синхронный двигатель имеет отличия в конструкции. Ротор дополняется магнитом постоянного типа либо электромагнитом. В нём имеются элементы, такие как для запуска беличья клетка и постоянные магниты. Также их роль могут выполнять электромагниты.
В асинхронном двигателе у магнитного поля статора частота вращения совпадает с аналогичным показателем у ротора. Для включения используют асинхронные электродвигатели вспомогательного типа либо ротор с короткозамкнутой обмоткой. Асинхронные двигатели смогли найти широкое применение во всех технических областях.
Особенно это актуально в отношении трехфазных двигателей, характеризующихся простотой конструкции. Они не только доступны по цене, но и надежнее в сравнении с электрическими. Ухода они не требуют почти никакого. Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
Название асинхронный, присвоенное им, обусловлено несинхронным вращением ротора в таком двигателе. Если отсутствует трехфазная сеть, такой двигатель может включаться в сеть однофазного тока.
В составе статора асинхронного электродвигателя присутствует пакет. В нём имеются лакированные листы электротехнической стали, чья толщина составляет 0,5 мм. У них есть пазы, куда уложена обмотка. Три фазы обмотки соединены друг с другом треугольником или звездой, которые смещены на 120 градусов пространственно.
Если речь идет о роторе электродвигателя, в котором имеются контактные кольца в пазах, здесь отмечается ситуация, похожая на обмотку статора. Это актуально, если он включён звездой либо начальные концы фаз соединены тремя контактными кольцами, зафиксированными на валу. Когда двигатель запущен, можно подключить реостат на фазы обмотки для контроля частоты вращения. После успешного разбега контактные кольца коротко замыкаются, а потому обмотка ротора выполняет те же функции, что и в случае с короткозамкнутым изделием.
Современная классификация
По принципу формирования вращающего момента двигатели электрического типа делят на магнитоэлектрические и гистерезисные. Последняя группа отличается тем, что вращающий момент здесь формируется вследствие гистерезиса при чрезмерном намагничивании ротора. Такие двигатели не считаются классическими и не так распространены в промышленности. Наибольшее распространение получили магнитоэлектрические модификации, которые делятся на две большие группы, согласно потребляемой энергии. Это двигатели переменного и постоянного тока. Выпускаются также универсальные модели, которые способны питаться обоими видами электрического тока.
Основные особенности
Было бы правильно называть эти устройства электрическими нефазными. Это обусловлено тем, что фазы переключаются здесь непосредственно в двигателе. За счет этого мотор питается постоянным, как и переменным типами тока, с одинаковым успехом. Эта группа делится по способу переключения фаз и присутствию обратной связи. Они бывают вентильными и коллекторными.
Они бывают вентильными и коллекторными.
Что касается типа возбуждения, коллекторные двигатели подразделяют на модели с самовозбуждением, моторы с независимым возбуждением от постоянных магнитов и электромагнитов. Первый тип, в свою очередь, классифицируется на моторы с последовательным, параллельным, смешанным возбуждением.
Бесколлекторные, или вентильные изделия, работают от электричества. В них переключение фаз происходит посредством специального электроблока, носящего название инвертора. Процесс этот может оснащаться обратной связью, когда пускают в ход датчик положения ротора либо без обратной связи. Такое устройство можно фактически позиционировать, как аналог асинхронного устройства.
Агрегаты пульсирующего тока
Такой двигатель является электрическим, и питание у него осуществляется пульсирующим электротоком. Конструкционные особенности его схожи с аналогичными особенностями у устройств постоянного тока. Конструктивные отличия его от двигателя с постоянными показателями состоят в присутствии шихтованных вставок для выпрямления переменного тока. Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Используют его на электровозах со специальными установками. Характерной особенностью является наличие компенсационной обмотки и значительного количества пар полюсов.
Модификации переменного тока
Двигатель представляет собой устройство, питание которого происходит с переменным током. Агрегаты эти бывают асинхронными и синхронными. Различие состоит в том, что в асинхронных машинах магнитодвижущая сила статора перемещается со скоростью вращения ротора. У асинхронного оборудования всегда наблюдается разница между скоростью вращения магнитного поля и ротора.
Синхронный электродвигатель работает от переменного тока. Ротор здесь вращается сообразно движению магнитного поля питающего напряжения. Синхронные электродвигатели делятся на модификации с обмотками возбуждения, с постоянными магнитами, а также на реактивные модификации, гистерезисные, шаговые, гибридные реактивные типы устройств.
Выделяют и так называемый реактивно-гистерезисный тип. Выпускают также модели с шаговыми агрегатами. Здесь определённое положение ротора фиксируется подачей питания на определенные зоны обмотки. Переход в другое положение достигается посредством снятия напряжения с одних обмоток и перемещения его в другие области. Вентильные реактивные модели электрического типа формируют питание обмоток посредством полупроводниковых элементов. Асинхронное устройство имеет частоту вращения ротора, отличную от частоты вращающегося магнитного поля. Она создается питающим напряжением. Такие модели получили на сегодня наибольшее распространение.
Выпускают также модели с шаговыми агрегатами. Здесь определённое положение ротора фиксируется подачей питания на определенные зоны обмотки. Переход в другое положение достигается посредством снятия напряжения с одних обмоток и перемещения его в другие области. Вентильные реактивные модели электрического типа формируют питание обмоток посредством полупроводниковых элементов. Асинхронное устройство имеет частоту вращения ротора, отличную от частоты вращающегося магнитного поля. Она создается питающим напряжением. Такие модели получили на сегодня наибольшее распространение.
Универсальное коллекторное оборудование
Такой агрегат может работать на переменном и постоянном токе. Изготавливают его с последовательной обмоткой возбуждения при показателях мощности до 200 Вт. Статор выполняется из особой электротехнической стали. Обмотка возбуждения осуществляется при постоянном показателе напряжения полностью и частично при переменном показателе. Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
Номинальное напряжение для переменного электротока составляют 127 и 220 В, аналогичные показатели для постоянного параметра равны 110 и 220 В. Находят применение в электроинструментах и бытовых аппаратах.
То, как работает электродвигатель, зависит от его принадлежности к тому или иному типу оборудования. Модификации переменного тока с питанием от промышленной сети 50 Гц не дают получить частоту вращения больше 3000 оборотов в минуту. Вот почему для получения значительных частот используют коллекторный мотор электрического типа. Он к тому же легче и меньше по размерам, нежели устройства с переменными показателями с аналогичной мощностью.
В их отношении используют специальные передаточные механизмы, преобразующие кинематические параметры механизма до приемлемых. При использовании преобразователей частоты и при наличии сети повышенной частоты двигатели переменного тока легче и меньше коллекторных изделий.
Ресурс асинхронных моделей с переменными показателями значительно выше, нежели у коллекторных. Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Определяется он состоянием подшипников и особенностями обмоточной изоляции.
Синхронный двигатель, у которого есть датчик положения ротора и инвертор, считается электронным аналогом коллекторного двигателя постоянного тока. Фактически он является коллекторным электродвигателем с последовательно включенными обмотками статора. Они идеально оптимизированы для работы с бытовой электросетью. Такую модель, независимо от полярности напряжения, можно вращать в одну сторону, так как последовательное соединение обмоток и ротора гарантирует смену полюсов из магнитных полей. Соответственно, результат остается направленным в одну сторону.
Статор из магнитного мягкого материала применим для работы на переменном токе. Это возможно, если сопротивление в перемагничивании у него незначительное. Чтобы снизить потери на вихревые токи, статор делают из изолированных пластин. Он получается наборным. Его особенностью является то, что потребляемый ток ограничивается за счёт индуктивного сопротивления обмоток. Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Соответственно, момент двигателя оценочно становится максимальным и варьируется от 3 до 5. Чтобы приблизить к механическим характеристикам двигатели общего назначения, применяются секционные обмотки. Они имеют отдельные выводы.
Примечательно, что для передвижения некоторыми видами бактерий используется электродвигатель из нескольких белковых молекул. Он способен трансформировать энергию электрического тока в форме движения протонов во вращении жгутика.
Синхронная модель возвратно-поступательного движения работает таким образом, что подвижная часть устройства оснащена постоянными магнитами. Они зафиксированы на шторке. Посредством неподвижных элементов постоянные магниты находятся под воздействием магнитного поля и проводят перемещение штока возвратно-поступательным методом.
Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т. е. 1000 об/мин (при 50 Гц). Обмотка шестиполюсного статора с одним проводником на полюс и фазу представлена на рис. 1, д). Число всех пазов на статоре равно утроенному произведению числа полюсов статора на число пазов, приходящееся на полюс и фазу.
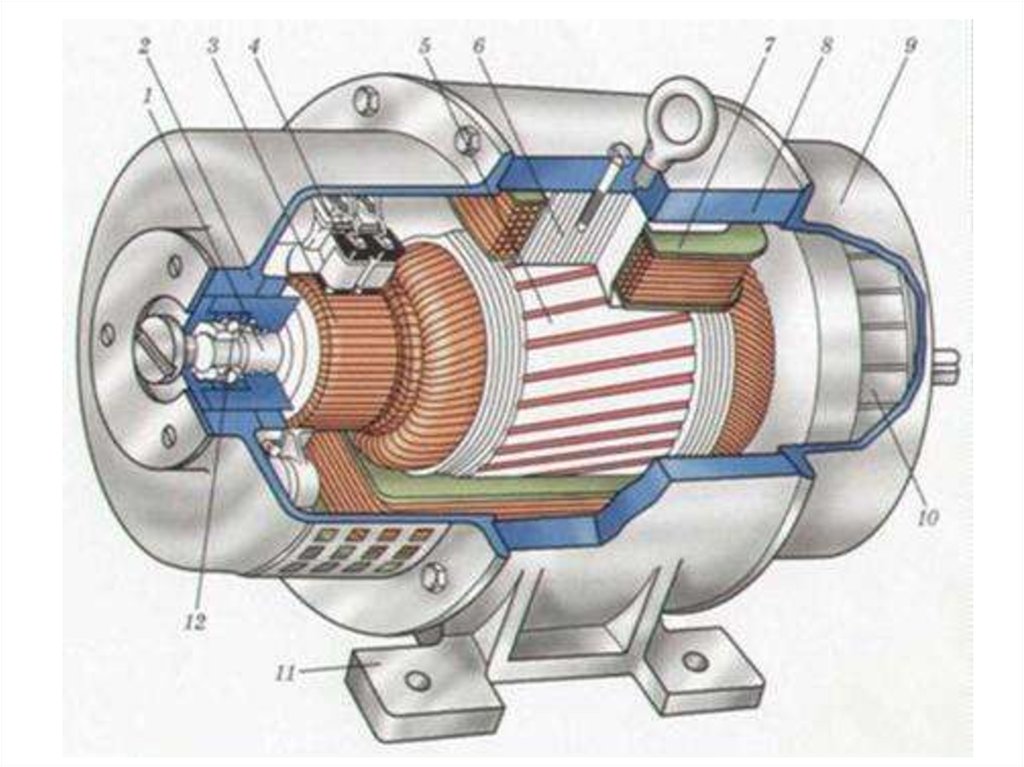
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором. Различие между этими электродвигателями заключается в устройстве ротора.
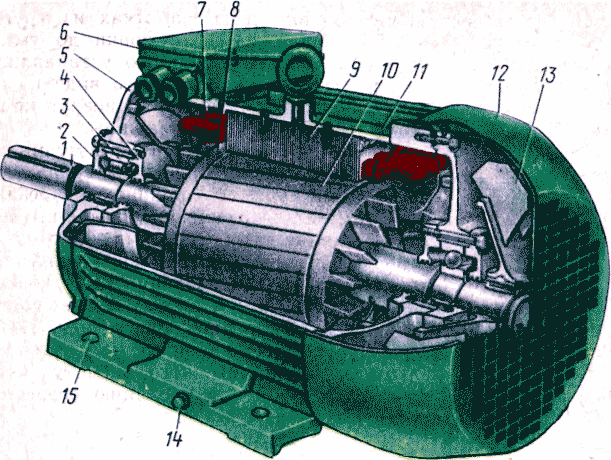
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Щетки, скользящие по поверхности колец ротора, все время имеют с ними хороший электрический контакт и соединены, таким образом, с обмотками ротора. Щетки соединены с трехфазным реостатом.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
Как работает электродвигатель?
Электродвигатель помогает преобразовывать электрическую энергию в механическую. Он основан на принципах электромагнетизма.
Для работы многих устройств требуются вращающиеся детали. Одним из таких используемых устройств является
электродвигатель.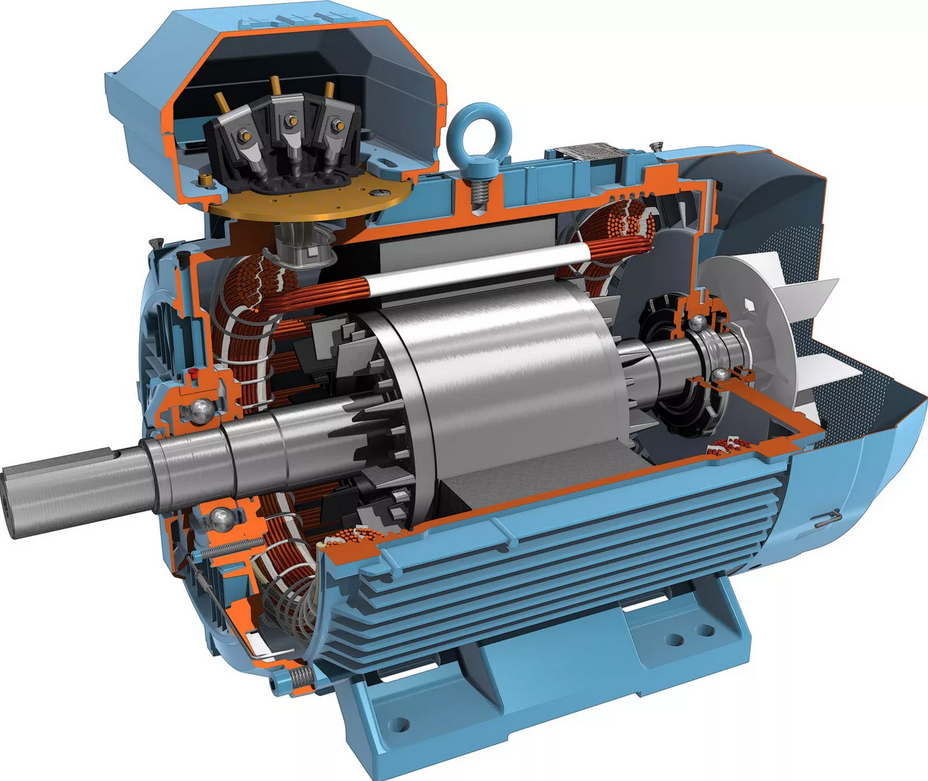 Электродвигатель представляет собой вращающееся устройство. Он играет роль в энергетике.
преобразование. Теории электродвигателей изучаются в физике.
Электродвигатель представляет собой вращающееся устройство. Он играет роль в энергетике.
преобразование. Теории электродвигателей изучаются в физике.
Электродвигатель является широко используемым инструментом. Он используется в повседневной жизни. Электродвигатель полезен для преобразования одного вида энергии в другой. Электрический двигатель используется в транспортных средствах, устройствах и т. д. Он работает по принципу электромагнетизм. Эта статья поможет вам понять работу, строительство, и т. д. электродвигателя.
Что такое электродвигатель?
Электродвигатель — это прибор, преобразующий энергию. Электродвигатель представляет собой тип вращающегося устройства. Он преобразует электрическую форму энергии в механическую. Он работает по принципу электромагнетизма. Он работает из-за взаимодействия между магнитным полем двигателя. Магнитное поле взаимодействует с электрическим током в проводах обмотки. Это взаимодействие создает силу в виде крутящего момента. Этот крутящий момент приложен к валу двигателя.
Этот крутящий момент приложен к валу двигателя.
Постоянный или переменный ток используется для питания электродвигателя. Постоянный ток передается батареями или выпрямителями. Переменный ток передается инверторами, электрическими генераторами и электрическими сетями. Электродвигатели классифицируются на основе многих факторов. Например, тип источника питания, области применения и т. д.
Принцип работы электродвигателя
Каждый инструмент имеет свой принцип. Принцип описывает теорию, по которой работает прибор. Электродвигатель также имеет определенный принцип. Принцип работы электродвигателя заключается в том, что при пропускании тока через прямоугольную катушку, помещенную в магнитное поле, к катушке прикладывается сила. Эта сила отвечает за непрерывное вращение двигателя.
Благодаря этому вращению происходит преобразование энергии. Простыми словами, принцип работы электродвигателя переносится на проводник с током. Этот проводник с током создает магнитное поле. Этот проводник с током расположен перпендикулярно направлению магнитного поля. Благодаря этому он испытывает силу.
Этот проводник с током расположен перпендикулярно направлению магнитного поля. Благодаря этому он испытывает силу.
Конструкция электродвигателя
Каждое устройство имеет уникальную конструкцию. Необходимо понимание конструкции. Вот объяснение конструкции электродвигателя.
Конструкция электродвигателя
-
Он имеет прямоугольную катушку провода ABCD.
-
У него сильный подковообразный магнит. Катушка ABCD расположена перпендикулярно этому магниту.
-
Концы катушки ABCD соединены с разъемными кольцами P и Q. Эти разъемные кольца играют роль коммутатора. Это помогает изменить направление тока.
-
Внутренняя часть разрезных колец изолирована. Он прикреплен к оси. Ось свободно вращается.
-
Внешняя сторона токопроводящих кромок разрезных колец соединена со стационарными щетками. Эти щетки X и Y соединены с аккумулятором. Это завершает схему.
Это общая конструкция электродвигателя.
Детали электродвигателя
Электродвигатель состоит из множества частей. Эти детали необходимы для бесперебойной работы двигателя. Вот описание основных частей электродвигателя.
Детали электродвигателя
-
Ротор: это движущаяся часть двигателя. Его роль заключается во вращении вала двигателя. Это вращение на валу производит механическую энергию. Ротарь также содержит проводник. По этому проводнику текут токи. Это также помогает в общении с магнитным полем, присутствующим в статоре.
-
Подшипники: Подшипники используются для поддержки вращателя. Это необходимо для активации оси ротора. С помощью них расширяется вал двигателя. Он распространяется до нагрузки двигателя.
-
Статор: это неактивная часть электромагнитной цепи двигателя. Он состоит из постоянного магнита и обмотки. Статор можно изготовить из тонких металлических листов. Их называют ламинатами. Они помогают уменьшить потери энергии.
-
Обмотки: Провода, проложенные внутри катушки электродвигателя, называются обмотками.
 Обычно они намотаны на гибкий железный магнитный сердечник. Это создает магнитные полюса при подаче тока.
Обычно они намотаны на гибкий железный магнитный сердечник. Это создает магнитные полюса при подаче тока.
Это были все важные части и их использование в электродвигателе.
Работа электродвигателя
Упомянутый электродвигатель представляет собой вращающееся устройство. Работа электродвигателя объясняет его механизм. Вот несколько шагов, которые объясняют работу электродвигателя.
Работа электродвигателя
-
Когда аккумулятор двигателя включен, в нем протекает ток. Ток течет через катушку AB от A к B. При этом направление магнитного поля с севера на юг. О правиле левой руки Флеминга сила действует вниз на AB. Подобно этому восходящая сила применяется к CD. Благодаря этому катушка вращается. AB движется вниз, а CD движется вверх.
-
Теперь обе катушки AB и CD поменялись местами. Теперь поток тока идет от C к D. А направление магнитного поля — с севера на юг. Катушка CD получает направленную вверх силу и движется вверх.
 Катушка AB движется вниз. Таким образом, обе катушки делают половину оборота.
Катушка AB движется вниз. Таким образом, обе катушки делают половину оборота. -
Электродвигателю для работы требуется полный оборот. Для этого направление тока меняется. Направление тока меняется с помощью коммутатора. Коммутатор имеет два разрезных кольца. Щетки также присоединены к его контуру.
-
Когда катушка начинает вращаться, кольца тоже вращаются. Как только катушка становится параллельной магнитному полю, щетки касаются зазора между кольцами. Из-за этого цепь разрывается.
-
Из-за инерции кольцо продолжает двигаться. Противоположный конец кольца подключается к положительному концу провода.
-
Разрезные кольца P и Q прикреплены к катушке CD и AB соответственно. Благодаря этому направление тока в цепи меняется на противоположное.
-
Катушка CD слева, катушка AB справа. Ток в катушке CD меняется на противоположный. Теперь ток течет от D к C. На AB действует восходящая сила, а на CD — направленная вниз сила.
 Это удерживает катушку во вращении.
Это удерживает катушку во вращении. -
Эта реверсия электрического тока происходит после каждого полуоборота. Это позволяет катушке вращаться до тех пор, пока батарея не будет отключена.
Это детальная работа электродвигателя.
Преимущества электродвигателя
Электродвигатель имеет множество преимуществ. Это лучше, чем другие устройства преобразования энергии. Есть много преимуществ использования электродвигателя. Вот некоторые из них:
-
Первоначальная стоимость электродвигателя довольно низкая. Это лучше, чем двигатели, использующие ископаемое топливо.
-
Электродвигатель имеет различные рабочие части. За счет этого электродвигатель имеет более длительный срок службы.
-
Двигатель требует меньше обслуживания. Электродвигатель имеет среднюю мощность 30 000 часов.
-
Электродвигатель имеет автоматическое управление. Он упрощает управление и имеет функции автоматического запуска и остановки.
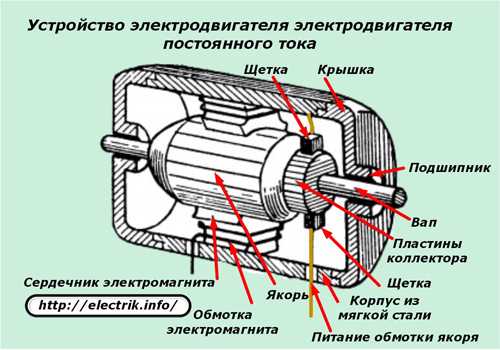 Кроме того, электрические двигатели очень эффективны.
Кроме того, электрические двигатели очень эффективны. -
Они не используют ископаемое топливо. Это потому, что им не нужно моторное масло.
Это различные преимущества электродвигателя. Благодаря этим преимуществам он является широко используемым инструментом для преобразования энергии.
Применение электродвигателя
Широко используется электродвигатель. Он получил много приложений. Эти приложения описывают использование электродвигателя. Электродвигатели являются неотъемлемой частью многих инструментов. Он имеет множество приложений. Некоторые из них:
-
Электродвигатель используется в воздуходувках, станках, электроинструментах, насосах и турбинах. Он также используется во вращающихся устройствах, таких как компрессоры, прокатные станы, вентиляторы, корабли, двигатели и т. д.
Применение электродвигателя
Электродвигатель также является обязательным компонентом многих устройств. К ним относятся отопительное и охлаждающее оборудование, различная бытовая техника, а также автомобили.
Вот несколько вариантов применения электродвигателя.
Заключение:
Электродвигатель является широко используемым инструментом. Его основная цель — преобразование энергии. Он эффективен в преобразовании электрической энергии в механическую форму энергии. Его функционирование можно объяснить принципами электромагнетизма.
Имеет различные части и уникальные конструкции. Это дешевле и эффективнее любого другого преобразователя энергии. Он имеет широкий спектр применения. Габаритный электродвигатель представляет собой эффективное устройство.
Двигатель, который может работать от источников переменного и постоянного тока, называется универсальным двигателем.
Электродвигатели, демонстрирующие преобразование энергии переменного тока в механическую, называются двигателями переменного тока. А те, которые показывают преобразование энергии постоянного тока в механическую, называются двигателями постоянного тока.
Нет. В вакууме электродвигатель будет работать некоторое время, а затем остановится, потому что смазочные материалы и изоляционные материалы испарятся из-за низкого давления и вакуума, это явление называется дегазацией.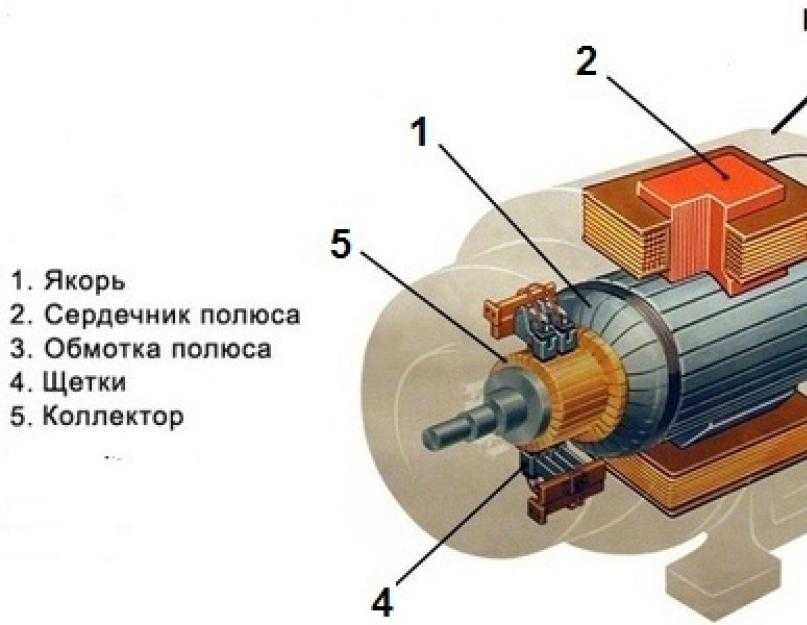
Электродвигатель: физика, эффективность и типы
Большинство из нас используют электродвигатели каждый день; питание электрической зубной щетки по утрам, вращение вентиляторов для охлаждения компьютера или запуск двигателя в автомобиле. Эти устройства преобразуют электрическую энергию в механическую и делают это с помощью всего одной движущейся части! В этой статье объясняются основные принципы работы электродвигателя, его компоненты, а также некоторые распространенные типы и области применения электродвигателей.
Электродвигатель Определение
Электродвигатель — это электромеханическое устройство, которое преобразует входную электрическую энергию в выходную механическую энергию. В двигателях постоянного тока это достигается в первую очередь за счет взаимодействия стационарного магнитного статора и электромагнитного ротора, создающего силу, это известно как моторный эффект.
Провод, по которому течет ток, создает магнитное поле вокруг провода. Когда это электромагнитное поле взаимодействует с другим магнитным полем, создаваемым постоянным магнитом или электромагнитом, на провод действует сила.
Когда это электромагнитное поле взаимодействует с другим магнитным полем, создаваемым постоянным магнитом или электромагнитом, на провод действует сила.
Величина силы зависит от напряженности постоянного магнитного поля, длины провода, проходящего через поле, и величины тока, определяемой уравнением моторного эффекта. Двигательный эффект наиболее силен, когда провод / ток и магнитное поле находятся под углом 90 ° друг к другу, при этом сила эффекта уменьшается до нуля, если провод и магнитное поле параллельны.
(слева) Схема моторного эффекта, показывающая взаимодействие провода с током с магнитным полем, воздействующим на провод. (справа) Левосторонний инструмент Флеминга — способ определения направления силы на проволоке. Изучайте умные оригиналы.
сила в ньютонах
плотность магнитного потока в теслах
сила тока в амперах
длина проводника в метрах с помощью которого можно легко определить направление силы, действующей на проводник с током в магнитном поле. Используя левую руку, держите большой, указательный и средний пальцы под прямым углом друг к другу, как показано выше. Затем укажите указательным пальцем в направлении магнитного поля (с севера на юг), а средним пальцем в направлении тока (+ к -). Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Используя левую руку, держите большой, указательный и средний пальцы под прямым углом друг к другу, как показано выше. Затем укажите указательным пальцем в направлении магнитного поля (с севера на юг), а средним пальцем в направлении тока (+ к -). Затем ваш большой палец указывает в направлении результирующей силы на проводе!
Типы электродвигателей
Существует бесчисленное множество различных вариантов конструкции электродвигателя для различных применений, но они делятся на две основные категории: двигатели переменного тока (AC) и двигатели постоянного тока (DC).
Двигатели постоянного тока
Простейшая форма двигателя постоянного тока состоит из стационарного магнитного поля и проводящей катушки, соединенной с коммутатором с разъемным кольцом, который подключается к источнику питания постоянного тока через щетки. На приведенной ниже диаграмме показан двигатель этого типа в исходном положении.
Схема, показывающая компоненты очень простого двигателя постоянного тока и то, как они создают вращательную силу вокруг оси двигателя. Росс Макдональд, StudySmarter Originals.
Росс Макдональд, StudySmarter Originals.
Теперь давайте пошагово рассмотрим, как работает двигатель постоянного тока:
-
Когда на щетки подается напряжение, коммутатор с разъемным кольцом передает это напряжение на катушку, которая создает ток в катушке. Катушка с током находится в магнитном поле, поэтому эффект двигателя создает противоположную силу на каждой стороне катушки, поскольку ток течет в противоположных направлениях. Это создает вращающую силу на катушке, и в этом примере двигатель начинает вращаться против часовой стрелки.
-
После поворота на 90 градусов от исходного положения коммутатор с разъемным кольцом меняет направление тока на обратное. Это приводит к тому, что сторона катушки в верхней части вращения теперь испытывает силу, направленную вниз, а сторона катушки в нижней части двигателя испытывает силу, направленную вверх. В сочетании с импульсом от начального вращения это продолжает ускорять катушку при вращении против часовой стрелки.

-
После поворота еще на 180° коммутатор с разъемным кольцом снова меняет направление тока и направление сил, действующих на катушку. Это ускоряет катушку на следующем полуобороте, и эта последовательность продолжается, пока двигатель вращается.
Коммутатор с разъемным кольцом используется для надежного переключения направления тока в катушке с той же скоростью, что и двигатель. Как видно на схеме выше, коммутатор с разъемным кольцом состоит из двух полуцилиндрических проводников, прикрепленных к каждому концу катушки двигателя. Щетки проводят ток от источника питания на две половины разъемного кольцевого коммутатора.
Когда двигатель вращается, коллектор с разрезным кольцом вращается вместе с ним. Поскольку щетки остаются неподвижными, это приводит к тому, что каждая сторона коллектора с разрезным кольцом контактирует с положительной щеткой на один полуоборот, а с отрицательной щеткой на другой полуоборот. Это приводит к тому, что полярность напряжения, подаваемого со щеток на катушку, меняется каждые пол-оборота, а также меняет направление тока.
Это приводит к тому, что полярность напряжения, подаваемого со щеток на катушку, меняется каждые пол-оборота, а также меняет направление тока.
Поскольку работа щеток и коллектора с разъемным кольцом зависит от физического скользящего контакта, часто это первая часть двигателя постоянного тока, которую необходимо заменить по мере износа щеток.
Существует три основных подхода к увеличению мощности двигателя постоянного тока:
-
Увеличение силы магнитного поля. Это увеличивает член в уравнении моторного эффекта, создавая большую силу на катушке.
-
Добавление дополнительных витков (петлей) в катушку. Это увеличивает общую длину катушки, увеличивая член в уравнении моторного эффекта и создавая большую силу.
-
Использование более высокого тока в катушке. Это увеличивает член в уравнении двигательного эффекта, создавая большую силу.
Производительность также можно улучшить, добавив железный сердечник к ротору электромагнита, как показано на более типичном двигателе постоянного тока ниже.
Схема типичного двигателя постоянного тока, показывающая катушку ротора с множеством контуров и железным сердечником для повышения производительности. Википедия.
Бесщеточный двигатель постоянного тока более совершенным типом. Как следует из названия, основное отличие этого типа двигателя заключается в том, что он не имеет коллектора с разрезным кольцом или щеточных компонентов. Вместо этого полярность напряжения питания постоянного тока изменяется в цифровом виде с помощью полупроводникового контроллера. Преимущество этого заключается в повышенной надежности, поскольку щетки в щеточных двигателях часто изнашиваются и требуют замены, а также в целом обеспечивает лучшую производительность.
Двигатели переменного тока
Двигатели переменного тока работают по тому же принципу, что и двигатели постоянного тока, но с некоторыми ключевыми отличиями. Как правило, обмотки катушки образуют статор (неподвижную часть) двигателя, а ротор представляет собой постоянный магнит или электромагнит.
В источнике питания переменного тока напряжение изменяется синусоидально от положительного к отрицательному, как показано ниже. Когда переменное напряжение подается на обмотки катушки статора электромагнита, переменное напряжение создает переменное магнитное поле. В двигателе переменного тока это переменное магнитное поле используется для создания вращающей силы на роторе и вращения двигателя. Коммутатор с разъемным кольцом больше не нужен, так как направление тока меняется на противоположное при подаче переменного тока.
(Вверху) — Синусоидальное изменение напряжения в сети переменного тока. (Внизу) — Соответствующая сила и направление магнитного поля, создаваемого электромагнитом с приложенным переменным напряжением. Росс Макдональд, StudySmarter Originals
Функции электродвигателей
Электродвигатели используются в бесчисленных устройствах, с которыми мы взаимодействуем каждый день. В бытовых устройствах обычно используется двигатель постоянного тока, если они питаются от батареи, и двигатель переменного тока, если они питаются от сети. Это делается для того, чтобы избежать преобразования источника питания с переменного тока на постоянный или наоборот, что снизит эффективность и увеличит стоимость из-за необходимых дополнительных компонентов. Ниже вы можете увидеть применение двигателей постоянного и переменного тока в повседневном использовании.
Это делается для того, чтобы избежать преобразования источника питания с переменного тока на постоянный или наоборот, что снизит эффективность и увеличит стоимость из-за необходимых дополнительных компонентов. Ниже вы можете увидеть применение двигателей постоянного и переменного тока в повседневном использовании.
Household DC Motors :
- Electric toothbrush
- Laptop cooling fan
- Remote-controlled car
- Battery-powered drill
- Vibration motor in a game controller
- Car starter motor
Household AC Motors :
- Вытяжка
- Кухонный миксер
- Пылесос
- Стиральная машина
- Микроволновая печь
Расчет мощности электродвигателя
При расчете мощности электродвигателя необходимо учитывать две переменные: выходную мощность и входную мощность.
Выходная мощность электродвигателя
Поскольку мощность равна энергии в секунду, мы можем рассчитать выходную механическую мощность двигателя, измерив время, необходимое для выполнения известного объема работы.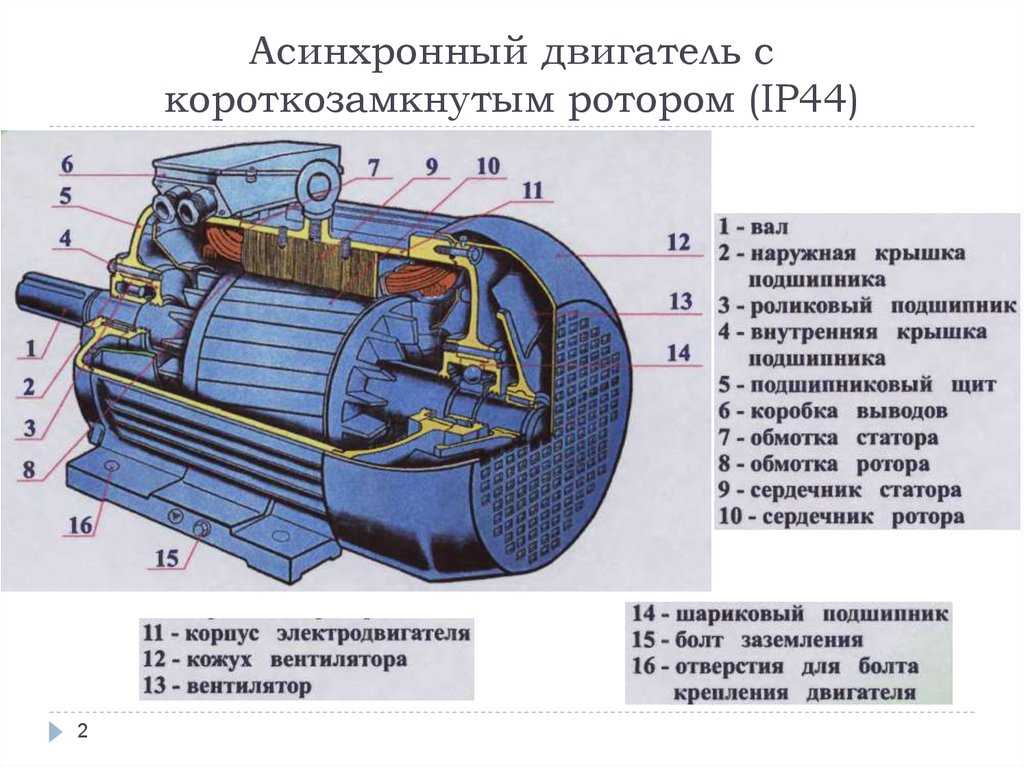 В простом эксперименте для этого можно было бы использовать двигатель, поднимающий массу, наматывая ее на веревку.
В простом эксперименте для этого можно было бы использовать двигатель, поднимающий массу, наматывая ее на веревку.
Мы знаем, что выполненная работа равна произведению силы на расстояние, на которое она приложена:
Механическая мощность двигателя (то есть выходная мощность двигателя) находится путем деления количества выполненной полезной работы на количество секунд, затраченных на выполнение этой работы.
Потребляемая мощность электродвигателя
Потребляемая мощность электродвигателя может быть найдена с помощью общего уравнения электрической мощности. Обратите внимание, что это можно сделать, потому что входная мощность электродвигателя представляет собой электрическую мощность.
КПД электродвигателя
Эффективность устройства — это способ измерения того, сколько вложенной энергии преобразуется в полезную выходную энергию. Общая формула КПД устройства:
Для электродвигателя входная мощность является электрической, а выходная — механической. Основным источником ненужной энергии в электродвигателе является тепло, которое производится как электрическим сопротивлением катушек проволоки, так и трением между движущимися и неподвижными компонентами.
Основным источником ненужной энергии в электродвигателе является тепло, которое производится как электрическим сопротивлением катушек проволоки, так и трением между движущимися и неподвижными компонентами.
КПД двигателя можно рассчитать, разделив полезную выходную механическую мощность на общую потребляемую электрическую мощность. Это преобразуется в процентную эффективность путем умножения на 100.
Поднятие веса на вертикальное расстояние требует работы. Двигатель тянет на на , чтобы поднять вес. Найти:
- Входная мощность двигателя.
- Выходная мощность двигателя.
- Эффективность двигателя.
Потребляемая мощность
Потребляемая мощность двигателя находится путем умножения напряжения на потребляемый ток:
Выходная мощность
Выходная мощность двигателя находится путем вычисления объема работы выполняется за время (в секундах), затраченное на выполнение работы:
КПД двигателя
КПД двигателя рассчитывается путем нахождения доли входной мощности, которая преобразуется двигателем в полезную выходную мощность. Чтобы найти КПД в процентах, умножаем соотношение на 100:
Чтобы найти КПД в процентах, умножаем соотношение на 100:
Электродвигатели – основные выводы
- Электродвигатели работают благодаря явлению, называемому моторным эффектом. Моторный эффект — это сила, действующая на проводник с током, когда он проходит через магнитное поле.
- Силу силы можно увеличить, увеличив либо напряженность магнитного поля, ток в проводе, либо длину провода в магнитном поле.
- В двигателе постоянного тока используется коммутатор с разъемным кольцом для изменения направления тока в проволочной катушке каждые пол-оборота. Это гарантирует, что сила, действующая на проволочную катушку, всегда продолжает ускорять вращение катушки и раскручивать двигатель.
- Двигатель переменного тока также использует эффект двигателя для вращения, но использует источник питания переменного тока для изменения направления тока вместо коммутатора с разъемным кольцом. Обычно двигатели переменного тока имеют обмотку катушки в статоре и ротор с постоянным магнитом или электромагнитом.
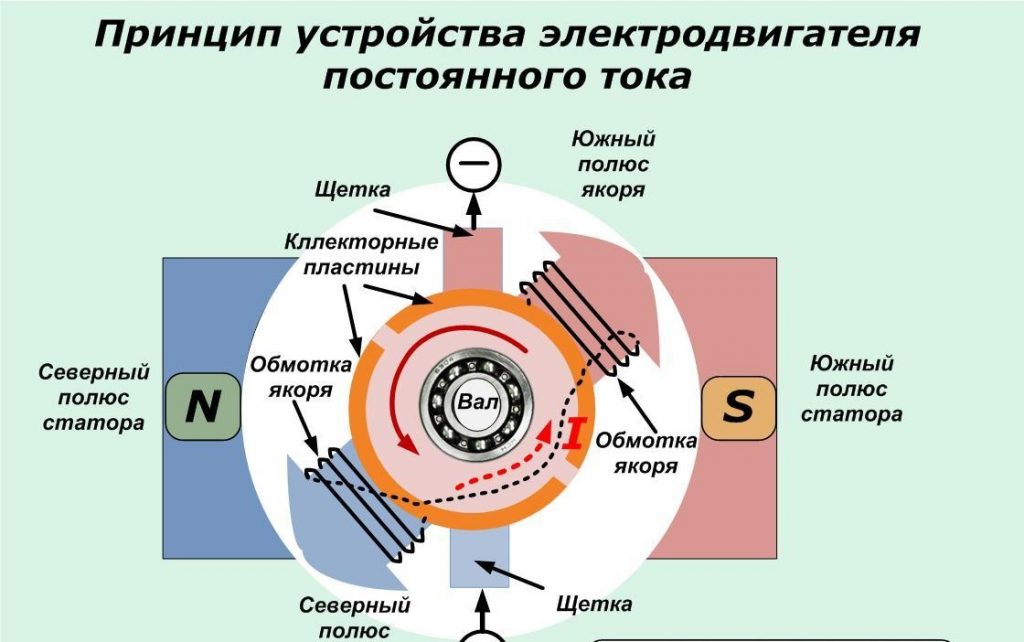
- КПД электродвигателя можно рассчитать, измерив, сколько входной энергии необходимо для выполнения известного объема работы.
20.2 Двигатели, генераторы и трансформаторы — физика
Раздел Цели обучения
К концу этого раздела вы сможете делать следующее:
- Объяснять, как работают электродвигатели, генераторы и трансформаторы
- Объясните, как коммерческая электроэнергия производится, передается и распределяется
Поддержка учителей
Поддержка учителей
Цели обучения в этом разделе помогут вашим учащимся освоить следующие стандарты:
- (5) Учащийся знает природу сил в физическом мире. Ожидается, что студент:
- (ГРАММ) исследовать и описывать взаимосвязь между электрическими и магнитными полями в таких приложениях, как генераторы, двигатели и трансформаторы.
Основные термины раздела
| электродвигатель | генератор | трансформатор |
Электродвигатели, генераторы и трансформаторы
Как мы узнали ранее, на проводник с током в магнитном поле действует сила — вспомним F=IℓBsinθF=IℓBsinθ .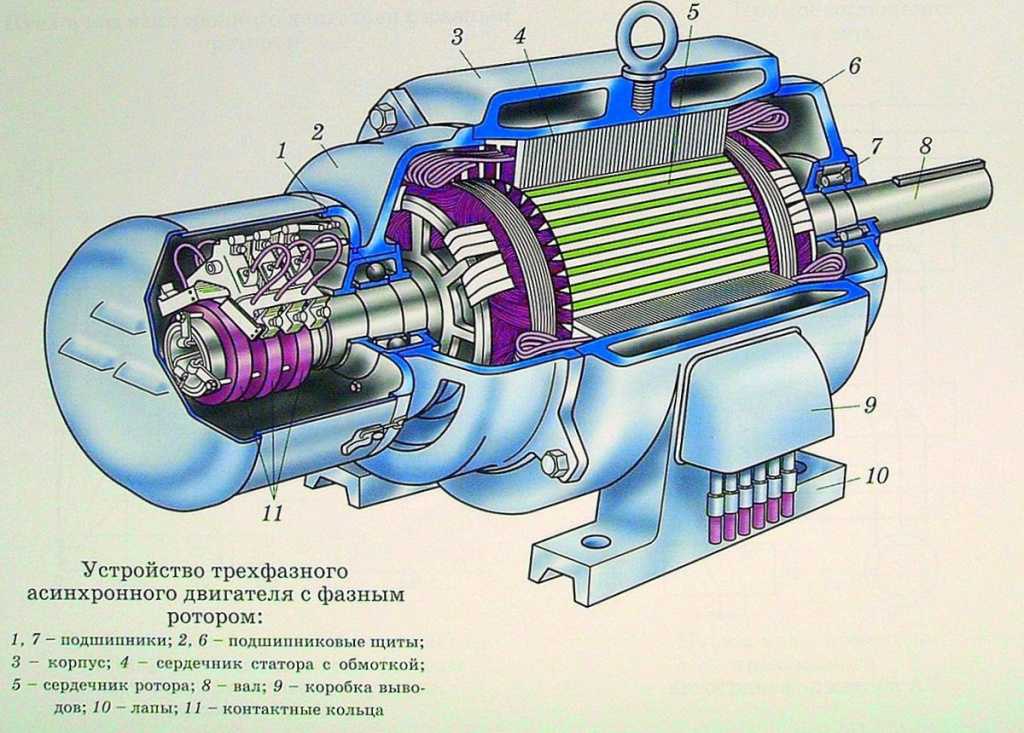 Электродвигатели, которые преобразуют электрическую энергию в механическую, являются наиболее распространенным приложением магнитной силы на проводах с током. Двигатели состоят из проволочных петель в магнитном поле. Когда ток проходит через петли, магнитное поле оказывает на петли крутящий момент, который вращает вал. При этом электрическая энергия преобразуется в механическую работу. На рис. 20.23 показан схематический чертеж электродвигателя.
Электродвигатели, которые преобразуют электрическую энергию в механическую, являются наиболее распространенным приложением магнитной силы на проводах с током. Двигатели состоят из проволочных петель в магнитном поле. Когда ток проходит через петли, магнитное поле оказывает на петли крутящий момент, который вращает вал. При этом электрическая энергия преобразуется в механическую работу. На рис. 20.23 показан схематический чертеж электродвигателя.
Рисунок 20.23 Крутящий момент в токовой петле. Вертикальная проволочная петля в горизонтальном магнитном поле прикреплена к вертикальному валу. Когда ток проходит через проволочную петлю, на нее действует крутящий момент, заставляющий вращать вал.
Давайте рассмотрим силу, действующую на каждый сегмент петли на рис. 20.23, чтобы найти крутящие моменты, возникающие вокруг оси вертикального вала, — это приведет к полезному уравнению для крутящего момента в петле. Считаем магнитное поле однородным на прямоугольной петле шириной w и высотой ℓ,ℓ, как показано на рисунке. Сначала рассмотрим силу, действующую на верхний сегмент петли. Для определения направления силы воспользуемся правилом правой руки. Ток идет слева направо внутрь страницы, а магнитное поле идет слева направо в плоскости страницы. Согните правые пальцы от текущего вектора к вектору магнитного поля, и ваш правый большой палец указывает вниз. Таким образом, сила на верхнем сегменте направлена вниз, что не создает крутящего момента на валу. Повторение этого анализа для нижнего сегмента — пренебрегая небольшим зазором, где выходят провода — показывает, что сила на нижнем сегменте направлена вверх, снова не создавая крутящего момента на валу.
Сначала рассмотрим силу, действующую на верхний сегмент петли. Для определения направления силы воспользуемся правилом правой руки. Ток идет слева направо внутрь страницы, а магнитное поле идет слева направо в плоскости страницы. Согните правые пальцы от текущего вектора к вектору магнитного поля, и ваш правый большой палец указывает вниз. Таким образом, сила на верхнем сегменте направлена вниз, что не создает крутящего момента на валу. Повторение этого анализа для нижнего сегмента — пренебрегая небольшим зазором, где выходят провода — показывает, что сила на нижнем сегменте направлена вверх, снова не создавая крутящего момента на валу.
Рассмотрим теперь левый вертикальный сегмент петли. Снова используя правило правой руки, мы находим, что сила, действующая на этот сегмент, перпендикулярна магнитному полю, как показано на рис. 20.23. Эта сила создает крутящий момент на валу. Повторение этого анализа на правом вертикальном сегменте петли показывает, что сила на этом сегменте направлена в направлении, противоположном силе на левом сегменте, таким образом создавая равный крутящий момент на валу. Таким образом, общий крутящий момент на валу вдвое превышает крутящий момент на одном из вертикальных сегментов петли.
Таким образом, общий крутящий момент на валу вдвое превышает крутящий момент на одном из вертикальных сегментов петли.
Чтобы найти величину крутящего момента при вращении проволочной петли, рассмотрите рис. 20.24, на котором показан вид проволочной петли сверху. Напомним, что крутящий момент определяется как τ=rFsinθ,τ=rFsinθ, где F — приложенная сила, r — расстояние от оси вращения до места приложения силы, а θ — угол между r и Ф . Обратите внимание, что при вращении петли ток в вертикальных сегментах петли всегда перпендикулярен магнитному полю. Таким образом, уравнение F=IℓBsinθF=IℓBsinθ дает величину силы на каждом вертикальном сегменте как F=IℓB.F=IℓB. Расстояние r от вала до места приложения этой силы составляет w /2, поэтому крутящий момент, создаваемый этой силой, равен
τsegment=rFsinθ=w/2IℓBsinθ=(w/2)IℓBsinθ.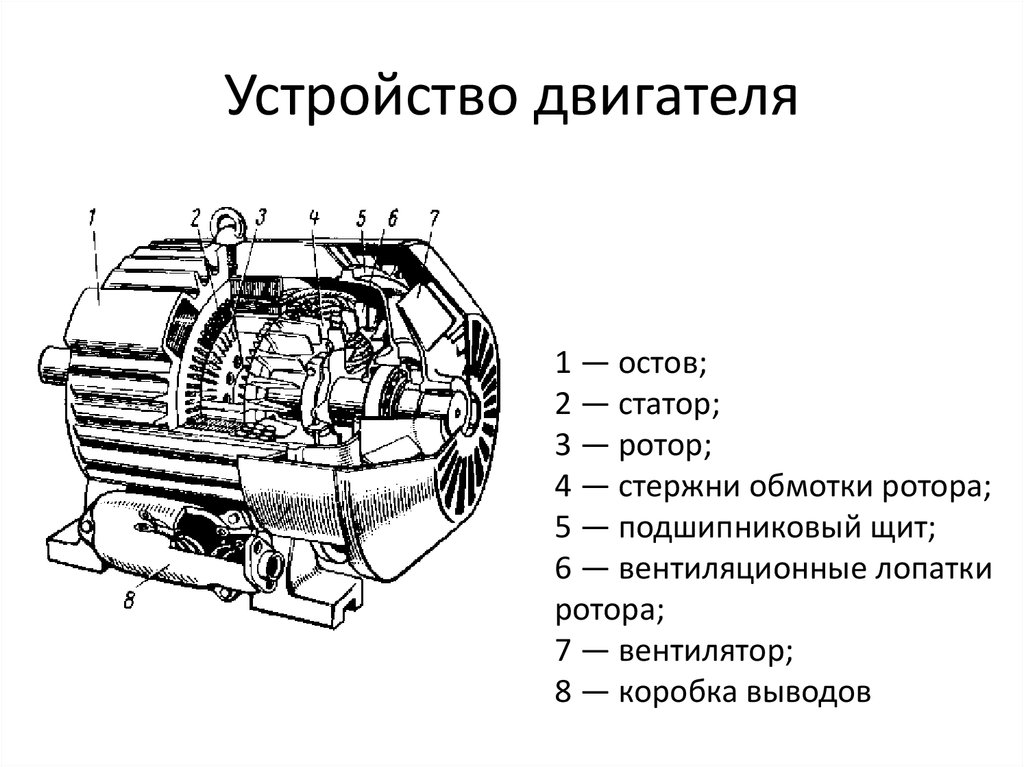
20.10
Поскольку есть два вертикальных сегмента, общий крутящий момент в два раза больше, или
τ=wIℓBsinθ.τ=wIℓBsinθ.
20.11
Если у нас есть многократная петля с Н витками, мы получаем Н раз больше крутящего момента одиночной петли. Используя тот факт, что площадь петли равна A=wℓ;A=wℓ; выражение для крутящего момента становится равным
τ=NIABsinθ.τ=NIABsinθ.
20,12
Это крутящий момент на петле с током в однородном магнитном поле. Можно показать, что это уравнение справедливо для петли любой формы.
Рисунок
20.24
Вид сверху на проволочную петлю с рис. 20.23. Магнитное поле создает силу F на каждом вертикальном сегменте проволочной петли, которая создает крутящий момент на валу. Обратите внимание, что токи Iin и IoutIin и Iout имеют одинаковую величину, потому что они оба представляют ток, протекающий в проводной петле, но IinIin течет в страницу, а IoutIout выходит из страницы.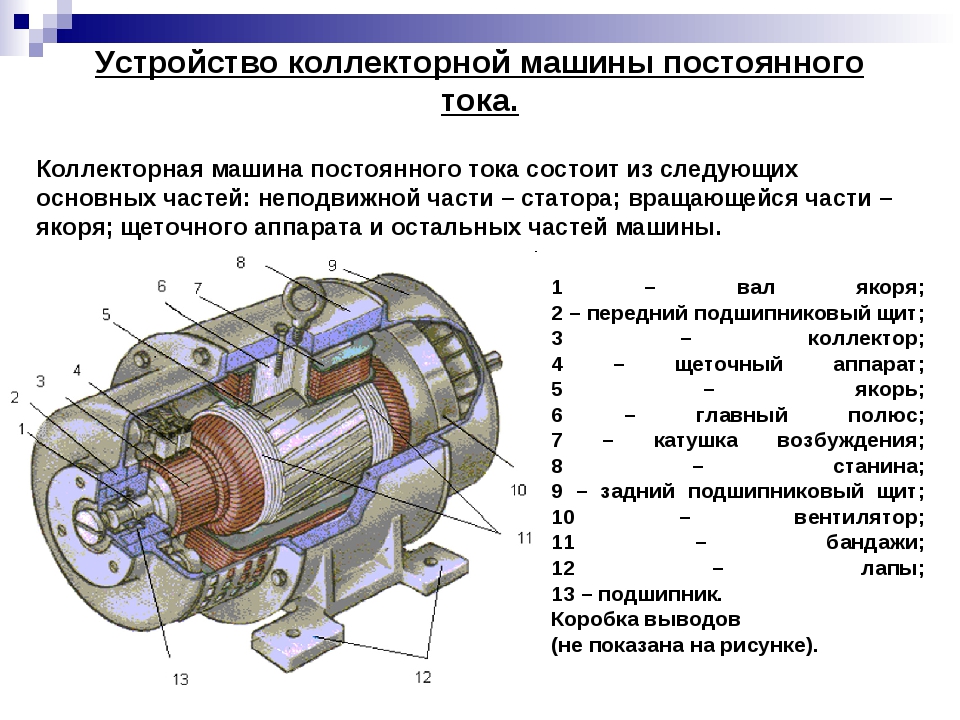
Из уравнения τ=NIABsinθ,τ=NIABsinθ видно, что крутящий момент равен нулю, когда θ=0,θ=0. По мере вращения проволочной петли крутящий момент увеличивается до максимального положительного крутящего момента wℓBwℓB, когда θ=90°.θ=90°. Затем крутящий момент снова уменьшается до нуля по мере того, как проволочная петля поворачивается до θ=180°.θ=180°. От θ=180°, θ=180° до θ=360°, θ=360°, крутящий момент отрицательный. Таким образом, крутящий момент меняет знак каждые пол-оборота, поэтому проволочная петля будет совершать возвратно-поступательные колебания.
Чтобы катушка продолжала вращаться в том же направлении, ток меняется на противоположный, когда катушка проходит через θ=0 и θ=180°, θ=0 и θ=180° с помощью автоматических переключателей, называемых щетки , как показано на рисунке 20.25.
Рисунок
20.25
(а) Поскольку угловой момент катушки переносит ее через θ = 0, θ = 0, щетки меняют направление тока, и крутящий момент остается по часовой стрелке. (b) Катушка непрерывно вращается по часовой стрелке, при этом ток меняется на противоположное каждые пол-оборота, чтобы поддерживать крутящий момент по часовой стрелке.
(b) Катушка непрерывно вращается по часовой стрелке, при этом ток меняется на противоположное каждые пол-оборота, чтобы поддерживать крутящий момент по часовой стрелке.
Рассмотрим теперь, что произойдет, если мы запустим двигатель в обратном направлении; то есть мы прикрепляем ручку к валу и механически заставляем катушку вращаться в магнитном поле, как показано на рис. 20.26. Согласно уравнению F=qvBsinθF=qvBsinθ, где θθ — угол между векторами v→v→ и B→—зарядыB→, заряды в проводах петли испытывают магнитную силу, поскольку они движутся в магнитном поле. Снова используя правило правой руки, когда мы сгибаем пальцы от вектора v→v→ к вектору B→B→, мы обнаруживаем, что заряды в верхнем и нижнем сегментах испытывают силу, перпендикулярную проводнику, которая не вызывает ток . Однако заряды в вертикальных проводах испытывают силы, параллельные проводу, в результате чего ток течет по проводу и через внешнюю цепь, если она подключена. Такое устройство, которое преобразует механическую энергию в электрическую, называется генератором.
Рисунок 20.26 Когда эта катушка поворачивается на четверть оборота, магнитный поток Φ изменяется от своего максимума до нуля, индуцируя ЭДС, которая пропускает ток через внешнюю цепь.
Поскольку ток индуцируется только в боковых проводах, мы можем найти ЭДС индукции, рассматривая только эти провода. Как поясняется в книге «Наведенный ток в проводе», ЭДС движения в прямом проводе, движущемся со скоростью v через магнитное поле B , равна E=Bℓv, E=Bℓv, где скорость перпендикулярна магнитному полю. В генераторе скорость составляет угол θθ с B (см. рис. 20.27), поэтому составляющая скорости, перпендикулярная B , равна vsinθ.vsinθ. Таким образом, в этом случае ЭДС, индуцированная на каждом вертикальном отрезке провода, равна E=Bℓvsinθ, E=Bℓvsinθ, и они имеют одинаковое направление. Суммарная ЭДС вокруг контура тогда равна
E=2Bℓvsinθ. E=2Bℓvsinθ.
E=2Bℓvsinθ.
20.13
Хотя это выражение справедливо, оно не дает ЭДС как функцию времени. Чтобы найти, как изменяется во времени ЭДС, предположим, что катушка вращается с постоянной угловой скоростью ω.ω. Угол θθ связан с угловой скоростью соотношением θ=ωt, θ=ωt, так что
E=2Bℓvsinωt.E=2Bℓvsinωt.
20,14
Напомним, что тангенциальная скорость v связана с угловой скоростью ωω соотношением v=rω.v=rω. Здесь r=w/2r=w/2, так что v=(w/2)ωv=(w/2)ω и
E=2Bℓ(w2ω)sinωt=Bℓwωsinωt.E=2Bℓ(w2ω)sinωt=Bℓwωsinωt.
20,15
Заметив, что площадь петли равна A=ℓwA=ℓw и учитывая N проволочных петель, находим, что
E=NABωsinωtE=NABωsinωt
20,16
— ЭДС, индуцируемая в катушке генератора N витков и площадок A вращающихся с постоянной угловой скоростью ωω в однородном магнитном поле B .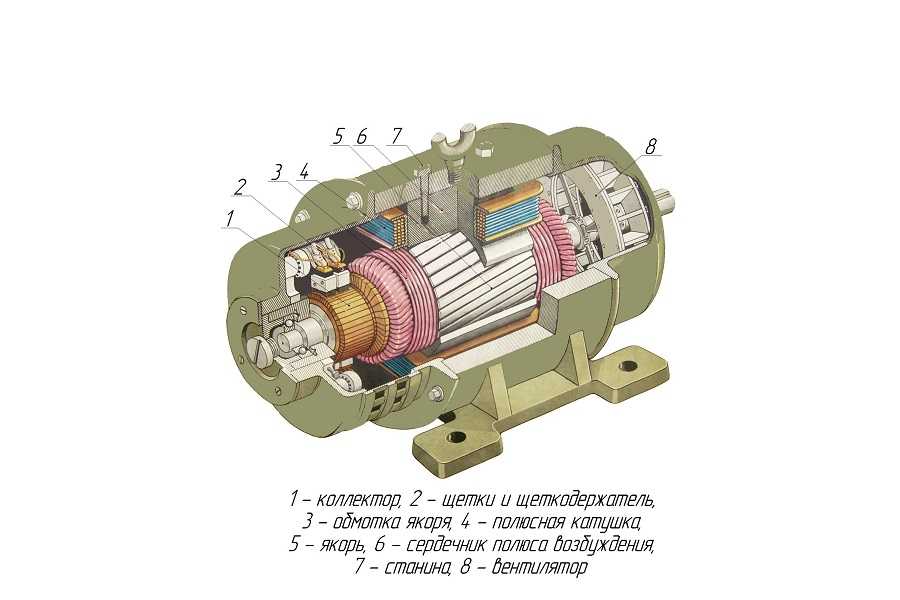 Это также может быть выражено как
Это также может быть выражено как
E=E0sinωtE=E0sinωt
20,17
где
E0=NABωE0=NABω
20,18
– максимальная (пиковая) ЭДС.
Рисунок 20.27 Мгновенная скорость вертикальных отрезков проволоки составляет угол θθ с магнитным полем. Скорость показана на рисунке зеленой стрелкой, указан угол θθ.
На рис. 20.28 показан генератор, подключенный к лампочке, и график зависимости ЭДС от времени. Обратите внимание, что ЭДС колеблется от положительного максимума E0E0 до отрицательного максимума -E0.-E0. Между ними ЭДС проходит через ноль, что означает, что в эти моменты через лампочку протекает нулевой ток. Таким образом, лампочка на самом деле вспыхивает и гаснет с частотой 2 f , потому что за период приходится два пересечения нуля. Поскольку переменный ток, подобный этому, используется в домах по всему миру, почему мы не замечаем мерцание света? В США частота переменного тока составляет 60 Гц, поэтому лампочки мигают с частотой 120 Гц. Это быстрее, чем частота обновления человеческого глаза, поэтому вы не замечаете мерцания огней. Кроме того, другие факторы препятствуют столь быстрому включению и выключению различных типов лампочек, поэтому светоотдача составляет немного сгладил .
Это быстрее, чем частота обновления человеческого глаза, поэтому вы не замечаете мерцания огней. Кроме того, другие факторы препятствуют столь быстрому включению и выключению различных типов лампочек, поэтому светоотдача составляет немного сгладил .
Рисунок 20.28 ЭДС генератора передается на лампочку с показанной системой колец и щеток. На графике показана зависимость ЭДС генератора от времени. E0E0 – пиковая ЭДС. Период равен T=1/f=2π/ω, T=1/f=2π/ω, где f — частота вращения катушки в магнитном поле.
Виртуальная физика
Генератор
Используйте эту симуляцию, чтобы узнать, как работает электрический генератор. Управляйте подачей воды, которая заставляет водяное колесо вращать магнит. Это индуцирует ЭДС в соседней проволочной катушке, которая используется для зажигания лампочки. Вы также можете заменить лампочку вольтметром, который позволяет увидеть полярность напряжения, которая меняется с положительной на отрицательную.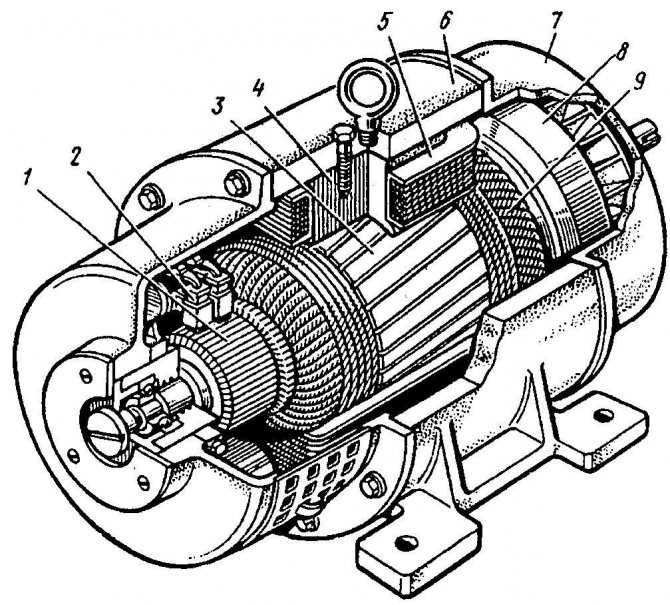
Проверка захвата
Установите количество проволочных петель равным трем, силу стержневого магнита примерно на 50 процентов и площадь петли на 100 процентов. Обратите внимание на максимальное напряжение на вольтметре. Предполагая, что одно основное деление вольтметра равно 5 В, каково максимальное напряжение при использовании только одной проволочной петли вместо трех проволочных?
- 5 В
- 15 В
- 125 В
- 53 В
В реальной жизни электрические генераторы выглядят совсем иначе, чем на рисунках в этом разделе, но принцип тот же. Источником механической энергии, вращающей змеевик, может быть падающая вода, гидроэнергетика, пар, образующийся при сжигании ископаемого топлива, или кинетическая энергия ветра. Рисунок 20.29показан вид в разрезе паровой турбины; пар движется по лопастям, соединенным с валом, который вращает катушку внутри генератора.
Рисунок
20.29
Генератор паровой турбины.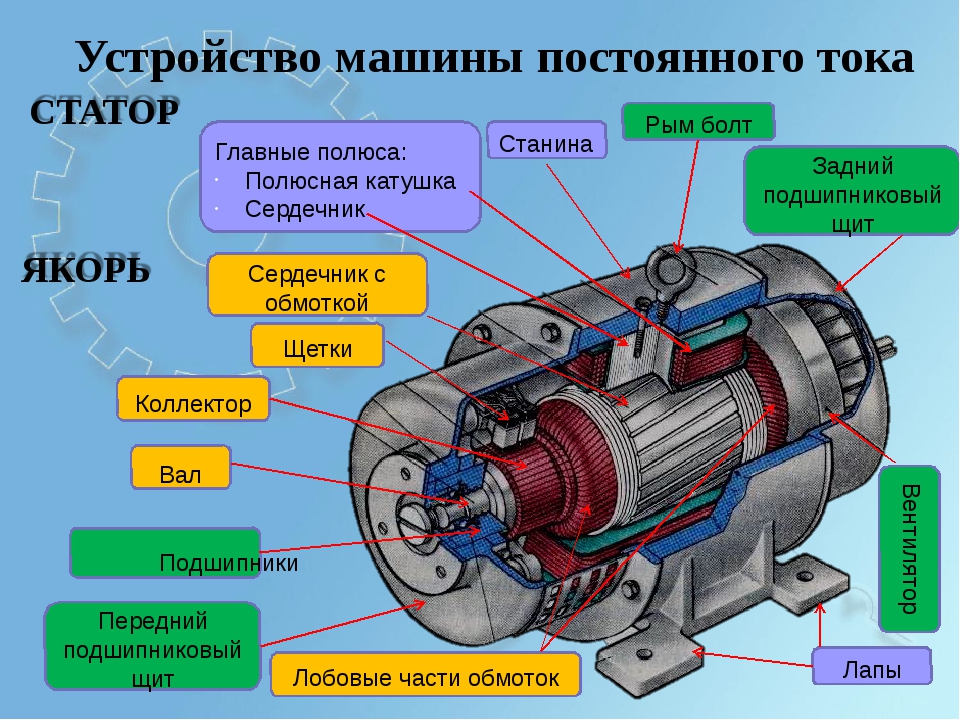 Пар, образующийся при сжигании угля, воздействует на лопатки турбины, вращая вал, соединенный с генератором. (кредит: Набонако, Викисклад)
Пар, образующийся при сжигании угля, воздействует на лопатки турбины, вращая вал, соединенный с генератором. (кредит: Набонако, Викисклад)
Другое очень полезное и распространенное устройство, использующее магнитную индукцию, называется трансформатором. Трансформаторы делают то, что следует из их названия — они преобразуют напряжение из одного значения в другое; термин напряжение используется, а не ЭДС, потому что трансформаторы имеют внутреннее сопротивление. Например, многие сотовые телефоны, ноутбуки, видеоигры, электроинструменты и небольшие бытовые приборы имеют встроенный трансформатор, который преобразует 120 В или 240 В переменного тока в любое напряжение, используемое устройством. На рис. 20.30 показаны два разных трансформатора. Обратите внимание на проволочные катушки, которые видны в каждом устройстве. Назначение этих катушек объясняется ниже.
Рисунок
20.30
Слева — обычный трансформатор с многослойным сердечником, который широко используется в электропередаче и электроприборах. Справа тороидальный трансформатор, который меньше трансформатора с многослойным сердечником при той же номинальной мощности, но его изготовление дороже из-за оборудования, необходимого для намотки проводов в форме пончика.
Справа тороидальный трансформатор, который меньше трансформатора с многослойным сердечником при той же номинальной мощности, но его изготовление дороже из-за оборудования, необходимого для намотки проводов в форме пончика.
На рис. 20.31 показан трансформатор с пластинчатой катушкой, основанный на законе индукции Фарадея и очень похожий по конструкции на аппарат, который Фарадей использовал для демонстрации того, что магнитные поля могут генерировать электрические токи. Две проволочные катушки называются первичной и вторичной катушками. При нормальном использовании входное напряжение подается на первичную обмотку, а вторичная создает преобразованное выходное напряжение. Железный сердечник не только улавливает магнитное поле, создаваемое первичной катушкой, но и его намагничивание увеличивает напряженность поля, что аналогично тому, как диэлектрик увеличивает напряженность электрического поля в конденсаторе. Поскольку входное напряжение переменного тока, через вторичную катушку проходит изменяющийся во времени магнитный поток, индуцирующий выходное напряжение переменного тока.
Рисунок 20.31 Типичная конструкция простого трансформатора состоит из двух катушек, намотанных на ферромагнитном сердечнике. Магнитное поле, создаваемое первичной катушкой, в основном ограничивается и усиливается сердечником, который передает его вторичной катушке. Любое изменение тока в первичной обмотке индуцирует ток во вторичной обмотке.
Для трансформатора, показанного на рис. 20.31, выходное напряжение VSVS со вторичной обмотки почти полностью зависит от входного напряжения VPVP на первичной обмотке и числа витков в первичной и вторичной обмотках. Закон индукции Фарадея для вторичной катушки дает ее индуцированное выходное напряжение VSVS равным
VS=-NSΔΦΔt,VS=-NSΔΦΔt,
20,19
где NSNS — число витков вторичной обмотки, а ΔΦ/ΔtΔΦ/Δt — скорость изменения магнитного потока. Выходное напряжение равно ЭДС индукции (VS = ES), (VS = ES) при условии, что сопротивление катушки мало — разумное предположение для трансформаторов. Площадь поперечного сечения катушек одинакова с каждой стороны, как и напряженность магнитного поля, поэтому ΔΦ/ΔtΔΦ/Δt одинаково с каждой стороны. Входное первичное напряжение VPVP также связано с изменением потока на
VP=-NPΔΦΔt.VP=-NPΔΦΔt.
20,20
Соотношение этих двух последних уравнений дает полезное соотношение
ВСВП=НСНП(3.07).ВСВП=НСНП(3.07).
20.21
Это известно как уравнение трансформатора. В нем просто говорится, что отношение вторичного напряжения к первичному напряжению в трансформаторе равно отношению количества витков во вторичной обмотке к количеству витков в первичной обмотке.
Передача электроэнергии
Трансформаторы широко используются в электроэнергетике для повышения напряжения (так называемые повышающие трансформаторы ) перед передачей на большие расстояния по высоковольтным проводам. Они также используются для снижения напряжения — называемые понижающими трансформаторами — для подачи электроэнергии в дома и на предприятия. Подавляющее большинство электроэнергии вырабатывается с помощью магнитной индукции, при которой проволочная катушка или медный диск вращаются в магнитном поле. Первичная энергия, необходимая для вращения катушек или диска, может быть обеспечена различными способами. Гидроэлектростанции используют кинетическую энергию воды для привода электрогенераторов. Угольные или атомные электростанции производят пар для привода паровых турбин, которые вращают змеевики. Другие источники первичной энергии включают ветер, приливы или волны на воде.
После выработки электроэнергии ее необходимо передать потребителю, что часто означает передачу мощности на сотни километров. Для этого напряжение силовой установки повышают повышающим трансформатором, то есть ступенчато, а ток уменьшается пропорционально т.к.
Pпередача=IпередачаVпередача⋅Pпередача=IпередачаVпередача⋅
20,22
Меньший ток IпередачаIпередача в проводах передачи уменьшает Джоулевые потери , то есть нагрев провода из-за протекания тока. Этот нагрев вызван малым, но отличным от нуля сопротивлением проводов передачи RwireRwire. Мощность, потерянная в окружающую среду за счет этого тепла, равна
Plost=Itransmitted2Rwire,Plost=Itransmitted2Rwire,
20,23
, что пропорционально току в квадрате в проводе передачи. Поэтому передаваемый ток Iпередача Iпередача должна быть как можно меньше и, следовательно, напряжение должно быть большим для передачи мощности Pпередачи⋅Pпередачи⋅
Напряжение от 120 до 700 кВ используется для передачи электроэнергии на большие расстояния. Напряжение повышается на выходе электростанции с помощью повышающего трансформатора, как показано на рис. 20.32.
Рисунок
20.32
Трансформаторы изменяют напряжение в нескольких точках системы распределения электроэнергии. Электроэнергия обычно вырабатывается при напряжении более 10 кВ и передается на большие расстояния при напряжении от 120 до 700 кВ для ограничения потерь энергии. Местное распределение электроэнергии в районы или предприятия проходит через подстанцию и передается на короткие расстояния при напряжении от 5 до 13 кВ. Оно снижено до 120, 240 или 480 В для обеспечения безопасности на объекте отдельного пользователя.
Как только электроэнергия поступает в населенный пункт или промышленный центр, напряжение на подстанции снижается до 5–30 кВ. Наконец, в отдельных домах или на предприятиях мощность снова снижается до 120, 240 или 480 В. Каждое повышающее и понижающее преобразование выполняется с помощью трансформатора, разработанного на основе закона индукции Фарадея. Мы прошли долгий путь с тех пор, как королева Елизавета спросила Фарадея, как можно использовать электричество.
Проверьте свое понимание
7.
Что такое электродвигатель?
-
Электродвигатель преобразует электрическую энергию в механическую.

-
Электродвигатель преобразует механическую энергию в электрическую.
-
Электродвигатель преобразует химическую энергию в механическую.
-
Электродвигатель преобразует механическую энергию в химическую.
8.
Что произойдет с крутящим моментом электродвигателя, если удвоить количество витков в двигателе?
-
Крутящий момент будет удвоен.
-
Крутящий момент уменьшился бы вдвое.
-
Крутящий момент увеличился бы в четыре раза.
-
Крутящий момент увеличился бы втрое.
9.
Что такое повышающий трансформатор?
-
Повышающий трансформатор уменьшает ток для передачи мощности на короткие расстояния с минимальными потерями.
-
Повышающий трансформатор увеличивает ток для передачи мощности на короткие расстояния с минимальными потерями.
-
Повышающий трансформатор повышает напряжение для передачи мощности на большие расстояния с минимальными потерями.
-
Повышающий трансформатор снижает напряжение для передачи мощности на короткие расстояния с минимальными потерями.
10.
Каким должно быть отношение числа выходных катушек к числу входных в повышающем трансформаторе, чтобы напряжение увеличилось в пять раз?
- Соотношение в пять раз больше.
- Соотношение 10-кратное.
- Соотношение 15-кратное.
- Соотношение 20-кратное.
Терминология электродвигателя-генератора, Терминология силовой электроники, Терминология магнитных подшипников, Терминология маховика, Терминология органического цикла Ренкина
Электродвигатель-генератор Терминология
PMSM двигатель : Бесщеточный электродвигатель переменного тока, аналогичный бесщеточному электродвигателю постоянного тока, в котором магнитное поле ротора создается постоянными магнитами, а не электромагнитами. Однако обмотки статора бесщеточных двигателей переменного тока представляют собой обмотки с синусоидальным распределением, а обмотки бесщеточного двигателя постоянного тока представляют собой катушки с явным возбуждением.
Прямой привод : Приводы, передающие мощность напрямую без зубчатых передач или других средств передачи мощности.
КПД (двигатель) : отношение выходной мощности к входной (эффективность преобразования энергии).
КПД (система) : общий КПД двигателя, органов управления, электрических кабелей, трансмиссии и ведомого оборудования. Это определяется путем перемножения эффективности отдельных компонентов.
Удельная мощность : отношение мощности к массе двигателя.
Константа крутящего момента : скорость, с которой крутящий момент увеличивается по отношению к току.
Противо-ЭДС (BEMF) : напряжение, возникающее при вращении двигателя с постоянными магнитами. Это пропорционально скорости двигателя и присутствует всякий раз, когда ротор вращается.
Неодимовый магнит : тип постоянного магнита с неодимом в структуре материала (NdB Fe).
Магнит из самария : тип постоянного магнита с самариевым кобальтом (SmCo) в структуре материала.
Температура Кюри : характерное свойство ферромагнитного материала, часто используемое в качестве точки отсчета для оценки магнитных свойств.
Ток размагничивания : Ток, при котором магниты двигателя начнут размагничиваться.
Потери в сердечнике : Потери в гистерезисе материала сердечника и потери на вихревые токи. Сердечник представляет собой магнитную сталь, вокруг которой построены обмотки двигателя.
Вихревой ток : Локализованные циркулирующие токи, индуцируемые в любом материале переменным магнитным потоком, вызывающие потери и нагрев.
Плотность потока : Плотность магнитного поля в любой точке пространства.
Магнитный поток : Мера количества магнетизма, принимая во внимание силу и протяженность магнитного поля.
Заметность : изменение индуктивности на клеммах двигателя в зависимости от положения ротора. Также называется заметностью индуктивности или магнитной заметностью.
Проницаемость : Мера того, насколько легко магнитное поле проходит через материал.
Насыщение : нелинейное свойство, при котором становится все труднее нагнетать дополнительный магнитный поток через материал.
Резольвер : устройство электромагнитной обратной связи, преобразующее угловое положение вала в аналоговые сигналы.
Терминология силовой электроники
Переменный ток (переменный ток) : Общедоступная электроэнергия, поставляемая генератором переменного тока и распределяемая в однофазной или трехфазной формах. Переменный ток меняет направление своего течения во времени (циклах).
Температура окружающей среды : Температура окружающей среды.
Ампер (Ампер) : Стандартная единица измерения электрического тока. Ток, создаваемый электродвижущей силой в один вольт в цепи с сопротивлением в один ом, равен одному амперу.
Обратная ЭДС : Электродвижущая сила, возникающая при прохождении проводника через магнитное поле. В двигателе он генерируется каждый раз, когда якорь движется в поле, независимо от того, находится двигатель под напряжением или нет. Термин «обратная» или «встречная» ЭДС относится к полярности напряжения и направлению тока, а не к напряжению питания и току двигателя под напряжением. Для получения подробной информации об обратной ЭДС нажмите здесь.
Константа противо-ЭДС (В/об/мин) : Константа, соответствующая соотношению между индуцированным напряжением в роторе и скоростью вращения. В бесколлекторных двигателях константа противо-ЭДС представляет собой константу, соответствующую соотношению между наведенным напряжением в фазах двигателя и скоростью вращения.
Мостовой выпрямитель (диод) : Диодный мостовой выпрямитель представляет собой неуправляемый двухполупериодный выпрямитель, который вырабатывает постоянное напряжение на выходе при подаче переменного напряжения на вход. Для получения подробной информации о мостовом диоде нажмите здесь.
Емкость : В качестве меры накопительного электрического потенциала конденсатора единицей измерения емкости является фарад, но типичные значения выражаются в микрофарадах.
Конденсатор : Устройство, накапливающее электрическую энергию.
Замкнутый контур : Описывает систему, в которой измеренное выходное значение сравнивается с желаемым входным значением и соответствующим образом корректируется (например, серводвигательная система).
Контроллер : используется для описания коллективной группы электроники, управляющей электрическим устройством (например, двигателем, приводом, индексатором и т. д.).
Преобразователь : Процесс преобразования переменного тока в постоянный или постоянного в переменный или постоянного в постоянный. Термин «преобразователь» может также относиться к процессу преобразования переменного тока в постоянный в переменный (например, в преобразователе частоты). «Преобразователь частоты», например преобразователь частоты, состоит из выпрямителя, промежуточной цепи постоянного тока, инвертора и блока управления.
Ток : Поток электронов через проводящий материал. Условно считается, что ток течет от положительного потенциала к отрицательному. Электроны, однако, на самом деле текут в противоположном направлении. Единицей измерения является Ампер.
Прямое управление крутящим моментом : Метод использования схемы регулирования тока для регулирования крутящего момента вместо скорости.
Привод : (также называемый приводом с регулируемой скоростью) Электронное устройство, которое может управлять скоростью, крутящим моментом, мощностью и направлением вращения двигателя переменного или постоянного тока.
Вихревые токи : Локализованные токи, индуцируемые в проводящем материале изменяющимся магнитным полем. Эти токи превращаются в потери (тепло), и их минимизация является важным фактором при проектировании двигателя.
Эффективность : Отношение выходной мощности к входной мощности, выраженное в процентах. В двигателях это отношение механической мощности к входной электрической, выраженное в процентах, то есть эффективность, с которой двигатель преобразует электрическую энергию в механическую.
ЭДС : обычно используемая в конструкции двигателя аббревиатура для обозначения электродвижущей силы, которая является еще одним термином для обозначения напряжения или разности потенциалов.
Обратная связь : Элемент системы управления, который выдает сигнал фактической работы для сравнения с заданным значением для установления сигнала ошибки, используемого схемой регулятора.
Ослабление поля : Действие по ослаблению силы магнитного поля во вращающемся механизме и, таким образом, уменьшению производимой обратной ЭДС. Следовательно, скорость, с которой может работать машина, может быть увеличена.
Фильтр : Устройство, пропускающее сигналы в желаемом частотном диапазоне и ослабляющее все остальные.
Частота : Частота — это количество повторений события в единицу времени. Типичной единицей измерения частоты является герц (Гц). Один Гц определяется как один цикл в секунду. Стандартная частота, используемая энергокомпаниями Северной Америки, составляет 60 Гц. Большая часть остального мира использует мощность 50 Гц.
Индуктивность : Индуктивность представляет собой отношение напряжения к скорости изменения тока. Единицей измерения индуктивности является Генри (Гн).
Катушка индуктивности : Катушка индуктивности представляет собой пассивный электрический компонент, который сопротивляется изменениям электрического тока, проходящего через него, создавая внутри своего сердечника изменяющееся во времени магнитное поле. Переменное магнитное поле индуцирует в проводнике напряжение, противодействующее изменению тока, которое его создало.
Инвертор : обычно описывает электронное устройство, которое преобразует напряжение постоянного тока в напряжение переменного тока.
Пластины : Стальная часть сердечника трансформатора или статора двигателя состоит из набора тонких пластин (листов), которые укладываются друг на друга и скрепляются вместе планками, заклепками или сваркой. Вместо сплошного куска используются пластины, чтобы уменьшить потери на вихревые токи.
Разомкнутый контур : Система управления без обратной связи.
Мощность : Работа, выполненная в единицу времени. Обычно измеряется в лошадиных силах или ваттах.
Коэффициент мощности : Коэффициент мощности представляет собой отношение реальной мощности (Вт) к полной мощности (ВА). В неискаженных системах переменного тока это также измерение разности фаз между напряжением и током. Он представлен косинусом угла этой разности фаз.
ШИМ : Широтно-импульсная модуляция. Аббревиатура, описывающая метод управления режимом переключения, используемый в приводах для управления напряжением и током двигателя. Этот метод управления используется в отличие от линейного или ступенчатого волнового управления и предлагает преимущества значительного повышения эффективности.
Выпрямитель : Устройство, преобразующее переменный ток в постоянный.
Сопротивление : Характеристики магнитного поля, которые сопротивляются потоку магнитных силовых линий через него.
Сопротивление : Это мера сопротивления току, протекающему через данную среду [Ом]. Вещества с высоким сопротивлением называются изоляторами, а вещества с низким сопротивлением — проводниками. Те, что находятся между ними, известны как полупроводники. Единицей является Ом.
Резистор : Устройство, которое сопротивляется протеканию электрического тока в целях эксплуатации, защиты или управления. Резисторы бывают двух видов — постоянные и переменные. Постоянный резистор имеет фиксированное значение в омах, а переменный резистор является регулируемым.
Разрешение : Наименьшее различимое приращение, на которое можно разделить величину (например, положение или скорость вала). Для энкодеров это количество уникальных электрически идентифицируемых положений, происходящих на 360 градусов вращения входного вала.
Среднеквадратичное значение тока : Среднеквадратичное значение тока. Среднеквадратичное значение (RMS) относится к наиболее распространенному математическому методу определения эффективного напряжения или тока волны переменного тока. В приложении с прерывистым рабочим циклом среднеквадратичное значение тока равно значению тока в установившемся режиме, который вызывает эквивалентный резистивный нагрев в течение длительного периода времени.
Постоянная скорости : Обратная константа противо-ЭДС. См. Постоянная противо-ЭДС.
Диапазон скоростей : Минимум и максимум, при которых электрическая машина должна безопасно работать в условиях нагрузки с постоянным или переменным крутящим моментом.
Регулирование скорости : В системах привода с регулируемой скоростью регулирование скорости измеряет способность двигателя и системы управления поддерживать постоянную заданную скорость, несмотря на изменения нагрузки от нуля до 100%. Она выражается в процентах от номинальной скорости системы привода при полной нагрузке.
Преобразователь : Устройство, преобразующее одну форму энергии в другую (например, механическую в электрическую). Кроме того, устройство, которое при активации сигналами от одной или нескольких систем или сред может подавать соответствующие сигналы в одну или несколько других систем или сред.
Транзистор : Твердотельное трехконтактное устройство, которое позволяет усиливать сигналы и может использоваться для переключения и управления.
Суммарные гармонические искажения (THD) : Измерение присутствующих гармонических искажений, определяемое как отношение суммы мощностей всех гармонических составляющих к мощности основной частоты. Для получения подробной информации о полном гармоническом искажении нажмите здесь.
Напряжение : Сила, вызывающая протекание тока в электрической цепи. Единицей является Вольт. 1. Вольт определяется как разность электрических потенциалов между двумя точками проводника, по которому течет постоянный ток силой один ампер, когда мощность, рассеиваемая между этими точками, составляет один ватт.
Ватт : Количество энергии, необходимое для поддержания силы тока в один ампер при напряжении в один вольт, когда они находятся в фазе друг с другом.
Работа : Сила, перемещающая объект на расстояние. Работа = сила х пройденный путь.
Терминология магнитного подшипника
Магнитный подшипник : тип подшипника, особенно для вращающихся валов, который использует электромагнитные силы для поддержки вала без механического контакта.
Активный магнитный подшипник (AMB) : Тип магнитного подшипника, в котором бесконтактная опора вала достигается за счет использования замкнутого контура управления. В таких подшипниках используются магнитные силы притяжения, при этом по крайней мере часть магнитной силы создается активно управляемыми электромагнитами. В состав АМП входят магнитный исполнительный механизм, датчик положения и контроллер магнитных подшипников (МБК) с устройством управления, усилителями мощности и источником питания. Большинство промышленных и коммерческих магнитных подшипников относятся к этому типу.
Пассивный магнитный подшипник : Тип магнитного подшипника, не требующий активного управления. Хотя существует большое разнообразие пассивных магнитных подшипников, они не нашли значительного коммерческого применения из-за низкой жесткости и низкой плотности силы на единицу площади поверхности.
Электромагнитный (ЭМ) магнитный подшипник со смещением : Тип АМП, в котором магнитное поле состоит из двух компонентов – постоянного поля смещения и переменного управляющего поля, при этом магнитное поле смещения создается электрическим током в катушка. Основная цель смещения — линеаризовать отношение приложенной силы к току катушки привода. Почти все коммерческие магнитные подшипники представляют собой AMB с электромагнитным смещением или AMB с постоянным магнитом (PM) (см. Ниже).
Подшипник со смещенным магнитом на постоянных магнитах (PM) : Тип AMB, в котором магнитное поле состоит из двух компонентов: постоянного поля смещения и переменного управляющего поля, при этом магнитное поле смещения создается постоянным магнитом ( ВЕЧЕРА). Как и в случае с EM Bias AMB (выше), основной целью смещения является линеаризация отношения приложенной силы к току катушки привода. Все коммерческие AMB являются либо AMB, предвзятыми к EM, либо AMB, предвзятыми к PM. Для получения подробной информации об активных магнитных подшипниках со смещением PM нажмите здесь.
Радиальный магнитный подшипник : Магнитный подшипник, в котором магнитные силы создают радиальную поддержку вала в двух ортогональных осях.
Осевой магнитный подшипник (или упорный подшипник) : Магнитный подшипник, в котором магнитные силы создают осевую поддержку вала.
Комбинированный радиальный и осевой магнитный подшипник (или комбинированный подшипник) : Магнитный подшипник, в котором магнитные силы обеспечивают как осевую, так и радиальную поддержку вала. Для получения подробной информации о подшипниках Combo нажмите здесь.
Контроллер магнитного подшипника (MBC) : электронное оборудование со всеми компонентами, необходимыми для работы системы AMB. MBC включает в себя источники электропитания, усилители мощности и компоненты обработки аналогового и/или цифрового управления. Все современные MBC теперь используют цифровое управление, поскольку оно обеспечивает наибольшую гибкость для использования с широким спектром машин, а также предоставляет широкий спектр возможностей ввода в эксплуатацию, диагностики и мониторинга. Для получения подробной информации о контроллере магнитных подшипников нажмите здесь.
Привод магнитного подшипника (или просто «Привод») : Устройство, способное создавать магнитные силы в магнитном подшипнике.
Магнитный датчик положения подшипника (или просто «датчик положения») : Устройство, способное определять смещение (положение) вала с широким диапазоном частот. В AMB информация от датчиков положения используется MBC для управления токами катушки привода и, следовательно, магнитной силой на валу. Чаще всего датчик положения будет включать сенсорную головку (преобразователь) в машине рядом с магнитным приводом и электроникой привода/демодуляции в MBC. Для получения подробной информации о датчиках положения нажмите здесь.
Датчик скорости вращения магнитного подшипника (или просто «Датчик скорости») : Датчик скорости — это устройство, способное измерять скорость вращения вала вокруг его оси вращения. Информация о скорости вала используется MBC, чтобы игнорировать синхронную составляющую изменений положения вала, что позволяет валу вращаться вокруг своего центра масс. Эта функция сводит к минимуму передачу вибрации вала из-за дисбаланса на корпус машины и снижает нагрузку на магнитные подшипники.
Система магнитных подшипников : Приводы, датчики положения, датчики скорости и контроллер магнитных подшипников вместе образуют полную систему управления, называемую системой магнитных подшипников или системой AMB, для управления положением вала в воздушном зазоре. Как правило, система магнитных подшипников имеет пять управляющих осей: четыре радиальные оси для управления поступательным движением и вращением в двух ортогональных плоскостях и одну осевую ось для управления поступательным движением в осевом направлении или направлении тяги. Для получения подробной информации о том, как эта система работает для управления положением вала, нажмите здесь.
Опорный подшипник (также вспомогательный подшипник или подшипник приземления) : Механические подшипники, такие как шарикоподшипники или стопорные кольца, используемые для поддержки вала и защиты компонентов от повреждения в случае отключения электроэнергии, есть это временная перегрузка магнитного подшипника или отказ какого-либо компонента системы АМП. Для получения подробной информации о опорных подшипниках нажмите здесь.
Левитация : Поддержка тела (ротора) в магнитном поле. Когда AMB активируется и управляет ротором до желаемого положения (уставки) с помощью магнитных сил, говорят, что ротор левитирует.
Магнитный центр AMB : Расположение в AMB, обычно вблизи геометрического центра, где силы магнитного притяжения уравновешены во всех направлениях и нет результирующей силы на валу, центрированном в этом положении.
Отрицательная жесткость магнитного подшипника (или просто «Отрицательная жесткость») : Жесткость положения привода из-за потока смещения при номинальном положении ротора без внешней нагрузки в АМП с электромагнитным или постоянным магнитным смещением. В обычной системе пружина/масса смещение массы из положения равновесия приводит к возникновению силы пружины, которая толкает массу обратно к равновесию – это положительная жесткость. В смещенном АМП без управления смещение массы (вала) из положения квазиравновесия в магнитном центре приводит к возникновению силы, которая тянет вал дальше от центра — это отрицательная жесткость. Из-за отрицательной жесткости АМП неустойчивы без регулирования по замкнутому контуру.
Электродвигатели и приводы с регулируемой скоростью
Электродвигатель обычно определяется как устройство, преобразующее электрическую энергию в механическую в форме вращения (крутящий момент и скорость). Привод с регулируемой скоростью — это электронное устройство, которое можно использовать для регулировки скорости вращения электродвигателя в соответствии с потребностями применения.
В ЕС используется около 8 миллиардов электродвигателей, которые потребляют почти 50 % электроэнергии, производимой в ЕС.
Этот сектор очень неоднороден, со значительным разнообразием технологий, приложений и размеров, начиная от крошечных двигателей, таких как те, которые приводят в действие вентиляторы охлаждения в компьютерах, до огромных двигателей в тяжелой промышленности.
Правила экодизайна электродвигателей и приводов с регулируемой скоростью обязательны для всех производителей и поставщиков, желающих продавать свою продукцию в ЕС.
Регламент об электродвигателях и приводах с регулируемой скоростью (ЕС) 2019/1781 вступает в силу с 1 июля 2021 г., заменяя Регламент об экодизайне электродвигателей (ЕС) № 640/2009.
Новый регламент имеет более широкую сферу применения и распространяется на односкоростные асинхронные двигатели с частотой 50 Гц, 60 Гц или 50/60 Гц
- с 2–8 полюсами
- с одной фазой или с тремя фазами
- номинальная мощность от 0,12 кВт до 1000 кВт
- номинальное напряжение от 50В до 1000В
- рассчитано на основе работы в непрерывном режиме и при прямом подключении к сети
Энергетическая эффективность электродвигателя рассчитывается как отношение механической выходной мощности к входной электрической мощности. Уровень энергоэффективности выражается в международных классах энергоэффективности (IE), где IE1 — самый низкий класс, а IE5 — самый высокий. В соответствии с действующим законодательством двигатели должны достигать уровня эффективности IE2, IE3 или IE4 в зависимости от их номинальной мощности и других характеристик. Например, трехфазные двигатели с номинальной мощностью от 0,75 кВт до 1000 кВт или ниже должны достичь уровня IE3 к июлю 2021 года. Двигатели мощностью от 75 кВт до 200 кВт должны соответствовать уровню IE4 по состоянию на июль 2023 года. ЕС занимает первое место. во всем мире, что делает уровень IE4 обязательным для некоторых категорий двигателей.
Некоторые двигатели, предназначенные для особых условий, исключены из этих правил, например те, которые погружаются в жидкость, например, в канализационные системы.
Регламент также устанавливает требования к эффективности приводов с регулируемой скоростью. Приводы с регулируемой скоростью имеют 2 уровня эффективности (IE1 и IE2), и норматив требует, чтобы все приводы в области применения соответствовали уровню IE2.
И двигатели, и приводы подчиняются информационным требованиям, таким как эффективность в различных точках нагрузки, с точки зрения скорости и крутящего момента. Это поможет инженерам оптимизировать эффективность всей системы.
Регламент (ЕС) 2019/1781 был изменен в 2021 году Регламентом Комиссии (ЕС) 2021/341, целью которого является уточнение и улучшение некоторых аспектов некоторых правил экодизайна, принятых в 2019 году.
Энергосбережение
Более эффективное Двигатель может обеспечить экономию от нескольких евро до нескольких десятков тысяч евро в течение всего срока службы, в зависимости от его мощности и характера использования.
Ожидалось, что более эффективные двигатели в соответствии с прежним регламентом к 2020 году принесут 57 ТВт-ч ежегодной экономии энергии в ЕС. к потреблению электроэнергии в Нидерландах. Это означает, что к 2030 году удастся избежать 40 миллионов тонн выбросов CO2 в год и что ежегодные счета за электроэнергию для домашних хозяйств и промышленности ЕС сократятся примерно на 20 миллиардов евро к 2030 году9. 0005
Кроме того, более широкое использование приводов с регулируемой скоростью в соответствующих приложениях, таких как насос, подающий расход воды, изменяющийся со временем, может обеспечить значительную экономию на уровне приложения. Это поощряется нормативными актами, требующими от производителей как двигателей, так и приводов предоставлять соответствующие данные об энергоэффективности в различных точках скорости/крутящего момента.
Международное сотрудничество
Электродвигатели составляют около 50% мирового потребления электроэнергии. Содействие внедрению на рынке эффективных двигателей и приводов является важным вкладом в борьбу с изменением климата. ЕС поддерживает Инициативу по развертыванию сверхэффективного оборудования и устройств (SEAD), объединяющую страны всего мира для сотрудничества в продвижении эффективных устройств. В настоящее время SEAD уделяет особое внимание электродвигателям, системам охлаждения, охлаждения и освещения и поставила цель удвоить эффективность этих продуктов, продаваемых по всему миру, к 2030 году, что недавно приветствовали министры G7. Этой цели способствуют новые нормативные требования ЕС, вступающие в силу с 1 июля. ЕС также является членом Приложения 4E Electric Motors Systems Международного энергетического агентства, которое направлено на повышение осведомленности во всем мире о потенциале эффективности систем двигателей и предоставляет рекомендации и инструменты для использования энергетических характеристик новых и существующих систем двигателей во всем мире.
Применение электродвигателей — электрические технологии
Электродвигатель — это машина, преобразующая электрическую энергию в механическую. Они являются самым важным инструментом в современной жизни. это помогает уменьшить усилия и расширить возможности выполнения задачи с использованием обычных возможностей. Двигатели эффективно сокращают трудозатраты и обеспечивают комфорт, удобство и безопасность, работая днем и ночью без каких-либо задержек. Двигатели потребляют более половины энергии, производимой в США в день. Вот некоторые из основных применений электродвигателей в эпоху современных технологий.
Связанные статьи:
- Однофазный асинхронный двигатель – конструкция, работа, типы и применение
- Трехфазный асинхронный двигатель – конструкция, работа, типы и применение
Содержание
Общие области применения электродвигателей
Ниже приведены различные варианты использования и применения двигателей переменного тока, двигателей постоянного тока и специальных двигателей в жилых и бытовых, а также коммерческих и промышленных целях.
HVAC
HVAC расшифровывается как отопление, вентиляция и кондиционирование воздуха. Это технология обеспечения теплового комфорта в любом помещении, например, в офисе, доме, автомобиле и т. д.
HVAC обеспечивает подачу свежего воздуха снаружи. Наружный воздух кондиционируется для охлаждения или обогрева различных частей здания или транспортного средства. Кондиционированный воздух нагнетается в воздуховоды с помощью вентиляторного двигателя.
Промышленная автоматизация
Используя двигатели, мы можем отказаться от использования труда или людей. Мы можем выполнять тяжелые задачи с высокой скоростью и без перерыва. Нет необходимости привлекать какую-либо рабочую силу. Большинство отраслей работают на автоматизированном оборудовании, чтобы работать без остановок. Они также необходимы для удовлетворения требований современного мира.
Они чрезвычайно эффективны, а автоматическое управление обеспечивает высокую производительность. Короче говоря, промышленная автоматизация — ничто без электродвигателей.
Преимущество в изменении климата
Электрический двигатель не требует топлива или какого-либо другого обслуживания, необходимого для любого двигателя. Использование электродвигателей в транспортных средствах и поездах позволяет нам использовать экологически чистую энергию или энергию многократного использования и сокращать выбросы опасных газов, влияющих на здоровье населения и экосистему.
Связанная статья: Типы электродвигателей – Классификация двигателей переменного и постоянного тока и специальных двигателей
Сельское хозяйство
Различные типы электродвигателей используются в сельском хозяйстве для исключения участия человека и повышения производительности. Они используются в каждой механической конструкции, используемой в сельском хозяйстве и сельском хозяйстве.
Различные виды машин используются в настоящее время для обработки почвы, вспахивания почвы, посадки, орошения, внесения удобрений и сбора урожая и т. д.
Они также используются для резки и упаковки этих овощей и фруктов, чтобы удовлетворить высокие требования рынка.
Компрессор
Воздушный компрессор — это механическое устройство, которое увеличивает давление газа за счет уменьшения его объема. Электродвигатель используется для нагнетания газа внутрь, увеличивая его давление, которое затем высвобождается через выпускное отверстие для совершения работы.
Компрессоры используются для очистки путем выпуска сжатого воздуха. Он также используется для наполнения газовых баллонов и шин. Сжатый газ можно использовать для очистки объектов на микроуровне. Он также используется в пистолетах для гвоздей.
Для окраски также требуется сжатый воздух, чтобы краска могла прочно прилипнуть к поверхности. Поэтому для покраски также используется воздушный компрессор.
Молочные фермы с сотнями коров, коз и овец требуют сотен рабочих, поскольку это такая трудоемкая работа. Воздушные компрессоры можно модифицировать для создания вакуумного всасывания в доильном аппарате, который отбирает молоко у коровы. Это повышает производительность, позволяя работникам работать с меньшими трудозатратами.
Статьи по теме:
- Разница между двигателями переменного и постоянного тока
- Разница между однофазным и трехфазным асинхронным двигателем
Нагнетатель
Нагнетатель — это оборудование, которое увеличивает скорость воздуха или газа. Он приводится в действие электродвигателем, который втягивает воздух с одной стороны и толкает его с высокой скоростью с другой стороны. Он используется в вытяжной системе или вентиляции, очистке от пыли или пылесосе.
Вентиляторы
Вентиляторы с электродвигателями используются для циркуляции воздуха в помещении. Он также используется для сушки вещей или людей. Он также используется для выпуска опасных паров или охлаждения электронных компонентов. Кроме того, вентилятор играет важную роль в HVAC.
Холодильное оборудование и Кондиционирование воздуха
Кондиционирование воздуха и холодильное оборудование означает охлаждение помещений. В основном он работает путем сжатия хладагента с помощью компрессора, который приводится в действие электродвигателем. его используют для сохранения продуктов путем поддержания температуры ниже нормы. Он также используется для изготовления льда из воды.
Насос
Насос используется для подачи жидкости. он не создает давления. Насос выталкивает воздух, создавая вакуум, который затем заполняется жидкостью. Они приводятся в действие электродвигателями, которые повышают эффективность и экономят время.
Насосы в основном используются для подъема воды (скважинные насосы и погружные двигатели) на поверхность, но они также используются в промышленности, особенно в нефтегазовой. Они используются в химической промышленности, где используются более умные электрические насосы.
Дробилка
Дробилка — это машина, которая используется для измельчения крупных камней в мелкие камни, песок или гравий. Электрический двигатель используется для выработки мощности дробления путем расщепления камней на более мелкие куски.
Дробилка в основном используется для подачи материала в строительных целях и при добыче полезных ископаемых. Он также обеспечивает порошкообразный материал для дальнейшей обработки.
Токарный станок
Токарный станок — это станок, который используется в металлообрабатывающей промышленности. Он вращает заготовку вокруг своей оси вращения. Он используется для резки, шлифования, сверления и придания любой заготовке желаемой формы. Он используется для проектирования компонентов, симметричных относительно оси.
Дрель
Сверлильный станок — это электроинструмент, используемый для проделывания отверстий. В нем используется электродвигатель, который питается либо от аккумулятора, либо от сети. Для сверления отверстий в пластике, дереве, металле, бетоне и т. д. используются сверла различных типов и мощности.
Электроинструменты
Электроинструменты представляют собой портативное ручное оборудование, которое питается от прикрепленной к ним батареи. Они предназначены для различных приложений. Например, шлифовальные машины, дрели, шлифовальные машины и т. д. Они экономят время и сокращают усилия. В большинстве электроинструментов используются электродвигатели.
Прокатный стан
Прокатный стан — это тяжелый инструмент со стальными роликами. Для вращения этих роликов используются электрические машины. Он используется для изменения формы или толщины любого металла или листа металла. Он также используется для увеличения твердости материала.
Бумажная фабрика
Бумажная фабрика производит бумагу, картон и другой древесноволокнистый картон с использованием различного оборудования. Имеются вальцовочные станки, режущие и прессовальные станки с приводом от электродвигателей.
Конвейер
Конвейер представляет собой механическую систему роликов или лент, которая используется для транспортировки или перемещения продуктов или материалов с минимальными усилиями. Это исключает использование рабочей силы, а также используется для подачи материала из одной машины в другую. Конвейерная система также повышает производительность отрасли.
Стиральная машина
Как следует из названия, она используется для стирки одежды. Есть электрическая машина, которая вращает одежду внутри машины. Он легко стирает одежду без помощи рук.
Сушильная машина
Сушильная машина быстро сушит одежду, вращая ее с такой скоростью, что капли воды выталкиваются из одежды. Помогает высушить одежду быстрее, чем обычно.
Статьи по теме:
- Разница между приводами переменного и постоянного тока
- Разница между устройством плавного пуска и частотно-регулируемым приводом
Лифт
Лифт или подъемник — это машина, которая перевозит пассажиров между этажами многоэтажного здания. Лифт имеет мощный двигатель, который вращает вал, натягивая тросы, соединенные с лифтом.
Помогает переносить людей с ограниченными возможностями, пациентов или снижает усилия при ходьбе по нескольким лестницам.
Эскалатор
Эскалатор — это лестница, которая перемещается вверх и вниз, перемещая людей между этажами. Электродвигатель приводит в движение цепочку лестниц, которая циркулирует.
Компьютерные дисковые накопители
Дисководы в компьютере, такие как CD-ROM или жесткий диск, имеют шпиндель, который вращается с очень высокой скоростью при надлежащем управлении. Двигатели BLDC используются для таких приложений, которые обеспечивают высокую скорость с контролем и долгим сроком службы. Кроме того, они менее шумные.
Принтеры и копировальные аппараты
Принтеры или фотокопировальные машины используются для печати документов. Они широко используются в офисах. У них есть несколько электродвигателей, которые работают синхронно для печати одного документа. В этих машинах в основном используется двигатель BLDC
Позиционирование
Серводвигатель и шаговый двигатель — это два разных типа электродвигателей, которые используются для точного позиционирования в системах управления. Он в основном используется в робототехнике и упаковочной промышленности.
Тяжелое оборудование
Тяжелое оборудование или механизмы относятся к тяжелым транспортным средствам, используемым в строительстве, таким как экскаваторы, бульдозеры, грейдеры, компакторы и т. д. Они используют гидравлический двигатель для перемещения шестерен, поршень обеспечивает низкую скорость и высокий крутящий момент. .
Подъемник
Подъемник — это устройство, используемое для легкого подъема, опускания или переноски тяжелых предметов с помощью цепи или троса. Он приводится в действие электрическим двигателем, который используется для натяжения или отпускания проволочного троса, окружающего его вал (соединенный с барабаном).
Это система шкивов, используемая для легкого ручного подъема очень тяжелых предметов.
Лебедки
Лебедка используется для натяжения, отпускания или регулировки натяжения тяжелого троса или троса. У него есть катушка, соединенная с валом двигателя, чтобы легко тянуть тяжелые провода. В основном они использовались на кораблях для тяги якоря и для горизонтальной тяги тяжелых предметов.
Роботы
Робот — это машина, способная выполнять любую задачу. Он может быть или не быть разработан в форме человека. Движение любой части робота достигается с помощью двигателей. Несколько двигателей работают последовательно для выполнения сложной задачи.
Универсальный двигатель (работает как на переменном, так и на постоянном токе) используется в таких приборах, как блендеры, пылесосы и фены. Они также используются в электроинструментах, таких как дрели-шлифовальные машины, шлифовальные машины и т. д., где желательны высокая скорость и малый вес.
Электрический двигатель имеет так много применений, что очень трудно назвать каждое из них. Проще говоря, все, что питается от электричества и движется, имеет внутри себя электрический двигатель. Проще говоря, электродвигатель является основой работающих отраслей промышленности и экономики из-за широкого применения задействованных в нем электродвигателей.
