Что такое высокомоментные электродвигатели. Как работают двигатели с постоянными магнитами. Какие преимущества дает технология прямого привода. Где применяются высокомоментные двигатели в промышленности.
Конструкция и принцип работы высокомоментных электродвигателей
Высокомоментные электродвигатели — это особый класс электрических машин, способных создавать большой крутящий момент при относительно низкой частоте вращения. Их ключевые особенности:
- Большой диаметр ротора относительно длины
- Повышенное число полюсов (часто более 30)
- Использование мощных постоянных магнитов (обычно из сплава неодим-железо-бор)
- Применение специальных схем обмоток статора
- Эффективное охлаждение, чаще всего жидкостное
Принцип действия основан на взаимодействии магнитного поля постоянных магнитов ротора с электромагнитным полем статора. За счет большого числа полюсов и оптимизированной конструкции достигается высокая плотность магнитного потока в воздушном зазоре, что обеспечивает создание значительного крутящего момента.
Преимущества высокомоментных двигателей с прямым приводом
Ключевое преимущество высокомоментных двигателей — возможность прямого привода без использования редукторов. Это дает ряд важных преимуществ:
- Исключение люфтов и повышение точности позиционирования
- Увеличение динамики привода за счет отсутствия механических передач
- Снижение шума и вибраций
- Уменьшение габаритов и массы привода
- Повышение энергоэффективности (отсутствуют потери в редукторе)
- Увеличение надежности и уменьшение объема техобслуживания
Всё это позволяет создавать высокоточные и динамичные системы электропривода для различных применений.
Особенности управления высокомоментными двигателями
Управление высокомоментными двигателями имеет ряд особенностей:
- Требуется высокоскоростная электронная коммутация обмоток
- Необходимы прецизионные датчики обратной связи по положению
- Важна широкая полоса пропускания системы управления
- Нужны алгоритмы подавления резонансов в механической части
- Требуется эффективное управление рекуперацией энергии при торможении
Современные сервоприводы обеспечивают все необходимые функции для реализации высокоточного управления такими двигателями.

Области применения высокомоментных электродвигателей
Основные сферы применения высокомоментных двигателей:
- Металлообрабатывающие станки с ЧПУ (приводы осей, шпиндели)
- Промышленные роботы и манипуляторы
- Экструдеры и литьевые машины для переработки пластмасс
- Печатные и упаковочные машины
- Подъемно-транспортное оборудование
- Ветрогенераторы
- Электротранспорт (мотор-колеса)
Благодаря своим преимуществам, высокомоментные двигатели находят все новые применения в различных отраслях промышленности.
Технология обмотки «Славянка» для асинхронных высокомоментных двигателей
Интересной альтернативой двигателям с постоянными магнитами являются асинхронные высокомоментные двигатели с обмоткой типа «Славянка». Их ключевые особенности:
- Повышенный пусковой момент (на 35% выше стандартного)
- Сниженные пусковые токи (на 35% ниже)
- Высокий КПД и коэффициент мощности в широком диапазоне нагрузок
- Улучшенные вибро-шумовые характеристики
- Повышенная перегрузочная способность
Такие двигатели могут стать хорошей заменой стандартным асинхронным двигателям в приводах с тяжелыми условиями пуска и переменной нагрузкой.

Сравнение высокомоментных двигателей с постоянными магнитами и асинхронных
Оба типа высокомоментных двигателей имеют свои преимущества:
| Параметр | С постоянными магнитами | Асинхронные («Славянка») |
|---|---|---|
| Максимальный момент | Выше | Ниже |
| КПД | Очень высокий | Высокий |
| Стоимость | Выше | Ниже |
| Простота управления | Требует сложных алгоритмов | Проще в управлении |
Выбор типа двигателя зависит от конкретных требований применения и экономических факторов.
Перспективы развития высокомоментных электродвигателей
Основные направления совершенствования высокомоментных двигателей:
- Повышение удельной мощности за счет новых магнитных материалов
- Улучшение тепловых характеристик, в том числе за счет применения новых способов охлаждения
- Снижение пульсаций момента для повышения плавности хода
- Интеграция датчиков и электроники управления непосредственно в конструкцию двигателя
- Разработка специализированных конструкций для конкретных применений
Развитие технологий высокомоментных двигателей позволит создавать все более эффективные и компактные электроприводы для широкого спектра промышленных применений.
Высокомоментные бесколлекторные двигатели с постоянными магнитами
Мощные и экономичные синхронные двигатели с постоянными магнитами работают без дополнительных передаточных элементов и обеспечивают очень высокий крутящий момент за счет более совершенной конструкции.
Многообразие конфигураций поставляемых электродвигателей позволяет решать самые разные задачи. Один из специальных типов двигателей, известный как высокомоментный безредукторный электродвигатель с постоянными магнитами (PM), характеризуется высоким отношением диаметра к длине и большим числом магнитных полюсов, что оптимизирует создание крутящего момента. Эти относительно низкоскоростные электродвигатели, обычно работающие с частотой ниже 1000 об/мин, предлагаются на рынке как в корпусном, так и в бескорпусном варианте.
Бесколлекторные (синхронные) безредукторные роторные двигатели (DDR) имеют ряд конструктивных особенностей, обеспечивающих выполнение заданных функций. Прямой (безредукторный) привод означает отсутствие элементов передачи мощности между двигателем и приводимой во вращение нагрузкой, что, в свою очередь, дает преимущества перемещения с высокой динамикой практически без люфта и превосходную жесткость при статических/динамических нагрузках. Все это обеспечивает прецизионное управление движением. Использование в роторе большого числа магнитных полюсов способствует созданию высоких крутящих моментов. Наблюдается тенденция к увеличению размеров двигателей с DDR (диаметр некоторых моделей уже превышает 1 метр), вместе с тем на рынке также предлагаются двигатели c меньшими габаритами. Пиковый крутящий момент на выходе, превышающий 20000 Нм, не является чем-то необычным.
Большой диаметр, большое число полюсов
В компании Bosch Rexroth Corp. отмечают другие преимущества высокомоментных двигателей DDR, такие как лучшее согласование с инерцией нагрузки, лёгкость управления, низкий уровень шума и рациональную конструкцию (см. диаграмму «Прямой привод упрощает конструкцию средств автоматизации»). Карл Рапп, руководитель отделения станкостроения Electric Drives & Controls Div. компании, подтверждает, что увеличение числа полюсных пар и диаметра ротора создаёт более высокий крутящий момент на выходе. Кроме того, оптимизация ориентации магнита, усовершенствование конфигурации пазов статора и технологии наматывания обмотки, а также конструкции воздушного зазора способны свести пульсации крутящего момента к минимуму. «Низкий уровень пульсаций крутящего момента требуется для обеспечения высокого качества операций шлифования/ хонингования, это качество также необходимо и в других областях применения», — говорит Рапп.

Технология, лежащая в основе высокомоментных двигателей прямого привода, позволяет упростить конструкцию станка и повысить точность перемещения. Это показано выше на примере делительно-поворотного стола. При этом исключается люфт в редукторе и приводном ремне.
В компании Danaher Motion также считают, что большой диаметр и повышенное число полюсов являются отличительными признаками высокомоментных электродвигателей прямого привода. «Крутящий момент квадратично зависит от диаметра и прямо пропорционально от длины ротора» — поясняет Том Инглэнд, директор по управлению производством компании. «Повышенное число полюсов, которое обеспечивает более высокое удельное содержание меди в обмотках, создающих крутящий момент, приводит к повышению эффективности магнитного поля», — констатирует Инглэнд.
Высокомоментные двигатели DDR предлагаются на рынке в двух классических вариантах. Вариант «бескорпусного» двигателя состоит из кольцеобразного ротора и набора элементов статора, которые заказчик должен встроить в конструкцию станка. По мнению Инглэнда должны быть также предусмотрены средства обратной связи и охлаждения, а также соединительные кабели, что требует выполнения существенного объема конструкторских и сборочно-монтажных работ. Тонкая кольцеобразная конструкция «бескорпусного» двигателя отличается применением полого входного вала большого размера. «Смонтированный в корпусе» двигатель DDR имеет корпус, подшипники, а также стандартный или полый вал. «Однако если станок уже оснащён подшипниками, смонтированный в корпусе двигатель не будет работать, поскольку непосредственное соединение трех (и более) подшипников на одной оси вызовет их повреждение», — продолжает он.
Недавно компания Danaher Motion реализовала другой подход, разработав третий, усовершенствованный вариант двигателя DDR, в основу которого, как сообщается, заложены преимущества предшествующих вариантов при одновременном исключении их недостатков. Под названием «кассетный DDR» (или CDDR) эти высокомоментные электродвигатели сохранили повышенное число полюсов и большой диметр, но не имеют подшипников. «Ротор устанавливается на подшипниках оборудования заказчика, что обеспечивает упрощенный монтаж при минимальном объеме конструкторской работы, а также возможность демонтажа двигателя без разборки станка,»- комментирует Инглэнд.
По мнению представителя компании Danaher, так сложилось исторически, что недостатком двигателей прямого привода всегда оставалась сложность их применения и стоимость. «Ситуация изменилась с внедрением технологии двигателей CDDR. Эта технология сделала доступными преимущества прямого привода как для простых механизмов, так и для классических, высокопроизводительных приложений сервоприводов», — заключает Инглэнд. Сегодня двигатели по технологии CDDR находят применение в упаковочном оборудовании, механизмах подачи прессов, в механизмах и оборудовании, используемых в перерабатывающей промышленности, в типографском и медицинском оборудовании.
Плотность крутящего момента, мощные магниты
В компании Siemens рассматривают конструкцию с высокой плотностью крутящего момента как неотъемлемую часть выпускаемых компанией высокомоментных двигателей. По словам Ральфа Бэрана, начальника производства серводвигателей и мехатронных устройств в подразделении Siemens Energy & Automation (E&A), плотность крутящего момента во многом зависит от силы постоянных магнитов. Компания Siemens использует магниты из сплава неодима, железа и бора (Nd-Fe-B) (которые считаются самыми мощными и доступными среди магнитов, изготовленных из редкоземельных металлов) в своих вмонтированных в корпус и бескорпусных (встраиваемых) высокомоментных двигателях.
Другим показателем высокой плотности крутящего момента является количество магнитных полюсов, предусмотренных конструктивным исполнением. Увеличение числа полюсов трансформируется в высокий крутящий момент на выходе, однако такая закономерность более действенна при малом числе полюсов. Например, существенное повышение крутящего момент может быть достигнуто при увеличении количества полюсов от четырех до восьми при сохранении постоянного объема двигателя, однако, по словам Бэрана, прирост крутящего момента будет гораздо меньше при изменении количества полюсов, скажем, от 32 до 46. «На основании практического опыта увеличение количества полюсов до 30 является хорошим способом повышения плотности крутящего момента»,- констатирует он. (Тем не менее, на рынке предлагаются бескорпусные высокомоментные двигатели с количеством полюсов, значительно превышающим 100.)
Компания Baumuller Nurnberg GmbH также уделяет большое внимание установлению оптимального соотношения между диаметром и длиной в конструкции своих многополюсных, синхронных, высокомоментных двигателей с постоянным магнитом серии DST. «В результате этого был достигнут устойчиво высокий крутящий момент в широком диапазоне скоростей», — говорит Марцел Мёллер, начальник производства электродвигателей.
В швейцарской компании ETEL S.A. отмечают, что наличие всё более эффективных средств моделирования и анализа упрощает разработку и оптимизацию двигателей. «Оптимизация конструкции двигателя приведет к максимальному повышению плотности потока за счет использования продуманной пластинчатой конструкции зубца и выбора материала пластин при одновременном сохранении возможности монтажа максимального количества материала обмоток, что необходимо для создания крутящего момента, перпендикулярного направлению магнитного потока»,- говорит Кевин Дерабас, президент ETEL S.A. в США. При этом он ссылается на конструкцию, запатентованную компанией ETEL S.A., с целью повышения «коэффициента заполнения» пластинчатых структур медными обмоточными проводами. Тем самым достигается коэффициент заполнения, равный 60% по сравнению с 30% для предыдущих конструкций. Компания ETEL S.A. изготавливает широкий спектр бескорпусных высокомоментных электродвигателей.
Особенности управления
По мнению компании Bosch Rexroth управление высокомоментными двигателями DDR осуществляется практически аналогично управлению другими бесколлекторными двигателями, однако требует определенных, специальных мер. Время срабатывания контуров управления (по току, скорости и положению) должно быть минимальным для достижения высокого уровня статической/динамической жёсткости. Интеллектуальные сервоприводы обеспечивают высокую скорость работы всех внутренних контуров (как правило, через каждые 0,25 мс). «Так как связка «привод + высокомоментный двигатель» обеспечивает подачу крутящего момента на обрабатываемую деталь, от нее непосредственно зависят точность и плавность обработки этой детали», — говорит Рапп. Как отмечалось выше, для точной механической обработки особо важное значение имеет снижение пульсации крутящего момента.
Для получения высокой степени жёсткости необходима более широкая полоса пропускания усилителя привода. «Высокая динамика способна возбудить механические гармоники, которые должны быть отфильтрованы усилителем за счет настроек фильтров, которые не должны вносить ограничения в характеристики», — предупреждает Рапп. Выбор стредств обратной связи также имеет принципиальное значение. Рекомендуется обратная связь с синусоидальным сигналом, поскольку интеллектуальные приводы извлекают из этого сигнала информацию об изменении скорости. «Следует избегать обратной связи последовательного типа, а также обратной связи с прямоугольным сигналом, поскольку это приводит к ограничению характеристик», — говорит Рапп.
Для работы бесколлекторных двигателей, оснащенных постоянными магнитами, требуется электронная коммутация (или переключение полюсов). Для высо-комоментных двигателей с DDR электронная коммутация не является простой процедурой, поскольку системы обратной связи полого вала являются чаще всего инкрементными, а не абсолютными, что требует от усилителя привода выполнения автоматической коррекции коммутации после каждого включения устройства управления. «Эта процедура ещё более усложняется при использовании двигателей с повышенным числом полюсов, так как расстояние между полюсами становится очень малым», — отмечает Рапп. Интеллектуальные приводы, например, привод IndraDrive компании Bosch Rexroth, предусматривают различные функции коммутации. Предпочтение отдается методу насыщения, поскольку его можно применять без механических перемещений в двигателе, объясняет он.
Бэран, представитель Siemens E&A, утверждает: «Физически высокомоментные двигатели имеют те же самые характеристики управления, что и другие бесколлекторные двигатели с постоянным магнитом. Тем не менее, исключение механических элементов из трансмиссии обеспечило избавление от люфта [«мертвого» хода] и от проблемы отсутствия механической жёсткости». Результатом этого явилось впечатляющее повышение механической жесткости трансмиссии.
Применительно к контроллеру это означает, что он может работать с большей скоростью без выхода за установленные пределы, что дает возможность его применения при повышенном уровне ускорения/торможения с более точным позиционированием и управлением траекторией, поясняет Бэран. «Опыт показал, что в отличие от традиционной комбинации «мотор-муфта-редуктор «,для станков, конструкция которых предусматривает использование прямого привода, можно добиться приблизительно десятикратного улучшения их динамики»,- говорит он.
Как сообщается, ввиду отсутствия редукторов и других механических элементов трансмиссии, двигатели DST с прямым приводом производства компании Baumuller имеют нулевой люфт, что обеспечивает высокую эффективность управления. Эта характерная особенность позволяет делать выводы о качестве соответствующего технологического процесса путем контроля крутящего момента и скорости двигателя, объясняет Мёллер. Изменения в эксплуатационных параметрах, например, изменения вязкости смазки, сопоставляются в контроллере с помощью компьютерных программ, в результате чего повышается эффективность управления системой и качество продукции. «Как правило, прямые приводы также повышают КПД всей системы и приводят к экономии энергии», — добавляет Мёллер.
Компания ETEL высказывает мнение о крайней необходимости хорошо демпфированного замкнутого сервоконтура для управления крутящим моментом двигателя, равно как и необходимости привода, способного справляться с энергией рекуперации во время быстрых торможений. Только благодаря конструкции прямого привода стало возможным «видеть» полный резонанс нагрузки и непосредственно отраженную инерцию. В случае аварийного останова электродвигатель быстро превращается в генератор, вырабатывающий большое количество рекуперированной энергии, которая должна при соответствующем управлении рассяться в приводе или поступить снова к источнику энергии, объясняет Дерабас.
Важность охлаждения
Большой крутящий момент вызывает выделение тепла в обмотках электродвигателя, которое должно отводиться во избежание его повреждения. «Охлаждение также сводит к минимуму температурное расширение статора, — констатирует Рапп. — Такое расширение может оказывать влияние на точность технологического процесса (вследствие увеличения размеров деталей), а также способно вызвать напряжённое состояние и повреждение элементов крепления двигателя». Поскольку двигатель встраивается в конструкцию станка, изготовители оборудования должны принимать во внимание различия в температурном расширении разнородных материалов с тем, чтобы предотвратить повреждение статора при его установке на станке. В компании Bosch Rexroth приводят пример одной из конструкций оборудования, которая допускала лишь частичную установку статора в посадочное отверстие станка. При отсутствии охлаждающей жидкости температурное расширение, возникшее на стороне статора за пределами станка, со временем вызвало растрескивание обмоток.
«Метод охлаждения и объем, выбор жидкости, сжатого воздуха или конвекции — всё это зависит в основном от потребляемой мощности или от средней загруженности, а также от анализа температурного расширения»,- добавляет Рапп.

Бескорпусные, высокомоментные двигатели IndraDyn T производства компании Bosch Rexroth состоят из кольцеобразного статора с трехфазными обмотками и ротора с постоянными магнитами. При скорости вращения 60 об/мин двигатель создает постоянный крутящий момент, равный 6300 Нм. На более низкой скорости пиковый крутящий момент равен 13800 Нм.
В компании Siemens также отмечают принципиальную роль охлаждения для повышения плотности крутящего момента. Самые большие тепловые потери происходят в обмотках статора бесколлекторных электродвигателей с PM, так как в роторе из-за отсутствия намагничивающих токов таких потерь нет. Одним из эффективных способов отвода тепла, вырабатываемого этими двигателями, является пропускание охлаждающей воды по трубам на минимальном расстоянии от обмоток статора, поясняет Бэран. «Испытания показали, что крутящий момент на выходе двигателя, спроектированного с расчетом на естественное воздушное охлаждение, может быть увеличен на 30% при условии его оптимизации под водяное охлаждение»,- отмечает он.
По данным компании ETEL реальная выходная мощность высокомоментных двигателей ограничена способностью удаления из обмоток тепла, вызванного их сопротивлением, а также тепловыми потерями на вихревые токи в пластинчатой структуре статора. (Потери на вихревые токи увеличиваются с ростом числа полюсов.) При невозможности отвода всего тепла увеличение температуры в обмотках в итоге приведет к разрушению изоляции, что повлечет за собой поступление тепла в ротор. Это тепло, в свою очередь, вызвать размагничивание высокомощных магнитов ротора, поясняет Дерабас. «Циркуляция воды на минимальном расстоянии от обмоток статора является эффективным средством с точки зрения экономии и теплоизоляции для максимального отвода тепла» — добавляет он. Вот почему на внешнем диаметре статора часто обнаруживаются кольцевые каналы, которые обеспечивают плотное расположение трубок охлаждения.

Вмонтированный в корпус высокомоментный двигатель прямого привода 1FW3 производства компании Siemens обеспечивает постоянный крутящий момент до 7000 Нм при скорости вращения 200 об/мин.

Высокомоментные двигатели серии DST производства компании Baumuller создают постоянный крутящий момент в диапазоне до 6130 Нм, обеспечивают степень защиты IP54 и включают в себя модели с полым валом (не показаны). Пиковый крутящий момент равен 13500 Нм. Варианты выбора обратной связи включают резольвер и синусно-косинусный преобразователь (дополнительная поставка).
Компания Baumuller встраивает водяное охлаждение в свои высокомоментные двигатели DST в качестве необходимой меры для достижения самого высокого крутящего момента. «Только так возможно достичь высокой плотности крутящего момента и одновременно высокой перегрузочной способности, — констатирует Мёллер. — Более того, встроенное водяное охлаждение обеспечивает более высокий класс защиты (IP54), что способствует соответствию двигателей DST жестким условиям промышленного применения». Кроме повышенной охлаждающей способности, другим неочевидным преимуществом водяного охлаждения является пониженный уровень шума. Компания Baumuller (и другие производители) отмечают, что высокомоментные двигатели DDR с водяным охлаждением работают тише, чем их аналоги, охлаждаемые вентиляторами.
Представитель компания Danaher Motion утверждает, что её кассетные двигатели CDDR имеют высокий КПД и способны заменить устройства с водяным охлаждением за счет внедрения герметичных, невентилируемых двигателей при существенном сокращении затрат. Тем не менее, для дальнейшего увеличения выходного крутящего момента этих двигателей в них можно добавить водяное или воздушное охлаждение.
Обзор областей применения
Несмотря на то, что высокомоментные электродвигатели DDR не относятся к изделиям крупносерийного производства, они имеют широкий диапазон применения. Станки, обрабатывающие центры, оборудование для обработки металлов давлением, агрегатные станки с делительно-поворотным столом, печатные линии, а также оборудование для обработки пластмасс — вот основные рынки этих двигателей. По данным компании Bosch Rexroth более экзотические сферы применения этих двигателей включают ветроэнергетику и использование энергии морских волн. Компания ETEL приводит пример использования этих двигателей в новом поколении подъемников, где замена гидравлических элементов позволяет снизить затраты на техническое обслуживание и упростить установку.
В компании Siemens отмечают использование высокомоментного двигателя 1FW3 (установленного в корпусе) и двигателя 1FW6 (встроенного типа) в составе многочисленных станков, а также для других производственных применений. Последние из упомянутых бескорпусных двигателей предназначены для встраивания в механизм пользователя, который обеспечивает установку двигателя на подшипники. Станки, оснащенные двигателями 1FW6, должны иметь энкодеры. Двигатели 1FW3, вмонтированные в корпус, содержат подшипники и энкодер. Они применяются в производстве изделий из пластмасс (в экструдерах, намоточных станках, в машинах для литья под давлением и т.д.), а также в бумажной и текстильной промышленности.
Компания Baumuller делает акцент на широком применении двигателей DST в частности в червячных и финишных приводах прессов для выдавливания пластмасс/машин для литья под давлением, а также в приводах цилиндров с печатной формой и офсетных цилиндров в полиграфической промышленности.
Одним словом, высокомоментные двигатели находят свою нишу там, где раньше применялись зубчатые передачи, цепи или приводные ремни, высказывается представитель компании ETEL.
Изготовители бесколлекторных высо-комоментных электродвигателей с прямым приводом и постоянными магнитами твердо убеждены в том, что производители оборудования могут добиться серьезных преимуществ в повышении производительности и качества при условии оптимизации их станочного оборудования под эти двигатели. Опыт, накопленный в Siemens E&A, показал реалистичность таких преимуществ. «В некоторых случаях производительность станков возросла на 50%, а их точность увеличилась примерно на 30%»- говорит Бэран.

Высокомоментный двигатель кассетного типа (CDDR) производства компании Danaher Motion (показан в разрезе) отличается обратной связью по положению и зажимной муфтой, которая крепится к валу станка пользователя. Двигатель имеет 46 магнитных полюсов и создает на выходе постоянный крутящий момент, равный 500 Нм при объёме 0,23 дм3.
В Siemens E&A называют дополнительные причины, по которым производителям оборудования следует применять эти высокомоментные двигатели. Они включают сокращённый объем технического обслуживания и меньшее количество запасных частей в силу малого количества деталей, использованных в конструкции этих двигателей, экономию энергии за счет более эффективной силовой передачи, а также экономию пространства за счет использования малогабаритных и компактных станков вместо станков, оснащенных комбинацией из мотора и редуктора.
Вконтакте
Google+
controlengrussia.com
Высокомоментные электродвигатели без использования постоянных магнитов
Высокомоментные электродвигатели со схемой обмотки Славянка без использования постоянных магнитов.
Высокомоментные электродвигатели со схемой обмотки Славянка без использования постоянных магнитов обладает уникальным соотношением мощности с энергопотреблением. Они рассчитаны для работы в условиях частых, тяжелых, затяжных пусков, больших (более 10%) падений питающего напряжения. В подавляющем большинстве случаев высокомоментные двигатели позволяют решить проблемы запуска двигателей без использования частотных регуляторов.
Купить товар
Описание
Преимущества
Сравнительные характеристики
Применение
Технические характеристики
Описание:
Асинхронный электродвигатель с обмоткой типа “Славянка” без использования постоянных магнитов обладает уникальным соотношением мощности с энергопотреблением.
Схема обмотки “Славянка” – это технология создания высокомоментных малошумных энергоэффективных асинхронных электродвигателей.
Высокомоментные электродвигатели со схемой обмотки “Славянка” по своим присоединительным размерам полностью соответствуют стандартным асинхронным электродвигателям, но, по желанию заказчика, могут поставляться и в исполнении с уменьшенными габаритами.
Такие высокомоментные двигатели рассчитаны для работы в условиях частых, тяжелых, затяжных пусков, больших (более 10%) падений питающего напряжения.
В подавляющем большинстве случаев высокомоментные двигатели позволяют решить проблемы запуска двигателей без использования частотных регуляторов. При работе совместно с частотным регулятором они обеспечивают механические характеристики недостижимые для других серий двигателей. При работе с регулярно меняющейся нагрузкой, при работе с неноминальной нагрузкой, при перепадах питающего напряжения двигатели позволяют снизить потребление электроэнергии на 50%.
Преимущества:
– имеют возможность эксплуатации как в режиме работы S1, так и в режиме работы S3,
– улучшены вибро-шумовые характеристики, в среднем уровень звука ниже на 5ДБ,
– имеют повышенную надежность сервис фактор 2,5,
– более высокий пусковой момент на 35%,
– меньшие пусковые токи на 35%,
– больший минимальный момент на 35%,
– больший максимальный момент на 20%,
– КПД и cos близкий к номинальному в диапазоне нагрузок от 25 до 150%,
– более «мягкая» механическая характеристика,
– большая перегрузочная способность,
– позволяют снизить электропотребление на 50% при работе с регулярно меняющейся нагрузкой, при работе с неноминальной нагрузкой, при перепадах питающего напряжения.
Сравнительные характеристики:
Сравнителные характеристики общепромышленных и высокомоментных электродвигателей со схемой обмотки “Славянка” представлены ниже.
1 – общепромышленные (со стандартной обмоткой)
2 – высокомоментные (со схемой обмотки “Славянка”)
Механическая характеристика:

График коэффициента мощности:

График КПД:

Применение:
– транспортные системы,
– подъемное оборудование,
– вентиляторы,
– насосы,
– компрессоры,
– редукторы,
– станки и т.д.
Высокомоментные электродвигатели выгодно использовать в любой сфере, заменяя ими обычные трехфазные асинхронные электродвигатели.
Технические характеристики:
Мощность: от 0,18 до 11 кВт.
Напряжения питания: любое до 1000 В.
Двигатели пригодны для эксплуатации в условиях климатических исполнений: У2, У1, УХЛ2, УХЛ1, Т2, Т1 по ГОСТ 15150.
Номинальные значения климатических факторов внешней среды по ГОСТ 15543.1 (п.2; 5,14) и ГОСТ 15150 (п.1,4), при этом:
– высота над уровнем моря не более 1200 м,
– запылённость воздуха не более 1,3 г/м3,
– окружающая среда не взрывоопасна, не содержит токопроводящей пыли, не содержит паров веществ, вредно влияющих на изоляцию.
Степень защиты двигателей: IP 55 и IP54 по ГОСТ 17494.
Двигатели могут быть оборудованы встроенной температурной защитой.
Группа механического воздействия по стойкости к воздействию механических внешних воздействующих факторов: М3по ГОСТ 17516.1 (п.1¸3; 6; 15).
Способ охлаждения двигателей IC0141 по ГОСТ 20459 (п.6).
Изоляция маслостойкая класса нагревостойкости F (155оС) или Н (180оС) по ГОСТ 8865 (п.1¸5).
Режим работы: продолжительный S1 и повторно-кратковременный S3 по ГОСТ 183. Повторно-кратковременный режим работы с ПВ от 0 % до 50 %. Допускается работа с ПВ от 50 % до 100 % в течение двух часов, но не чаще одного раза за 3 часа эксплуатации. Среднее количество пусков электродвигателя не более 30 в час. Количеством пусков в течение суток не более 200. Суммарное количество пусков в течение года не более 30000.
Двигатели при рабочей температуре выдерживают в течение 2 мин без повреждений и видимых остаточных деформаций повышение частоты вращения до 120% номинальной.
Двигатели выдерживают стоянку под током короткого замыкания после установившегося номинального режима работы при номинальном напряжении не менее 10 с.
Изоляция обмотки статора относительно корпуса и между обмотками выдерживает в течение 1 минуты испытательное напряжение 2500 В частоты 50 Гц.
Изоляция обмотки статора между смежными ее витками выдерживает в режиме холостого хода в течение 5 минут испытательное напряжение выше номинального значения на 50% с увеличенной частотой напряжения питания на 20%.
Двигатели выдерживают 50% перегрузку по току в течение 2 минут.
Двигатели, начиная с высоты вращения 80, имеют приспособления для подъема и транспортирования.
Двигатели имеют коробку выводов с двумя сальниковыми вводами, допускающую возможность поворота на 180º с целью подвода кабелей с двух сторон.
По способу защиты человека от поражения электрическим током двигатели имеют класс 1 по ГОСТ 12.2.007.0. В части пожаробезопасности двигатели соответствуют требованиям ГОСТ 12.1.004. Вероятность возникновения пожара не превышает 10-6 в год.




карта сайта
асинхронный электродвигатель 5 квт
подключение асинхронного электродвигателя на 220
асинхронный электродвигатель 3 квт
асинхронные электродвигатели каталог
асинхронный электродвигатель 220в купить
трехфазный асинхронный электродвигатель с короткозамкнутым ротором
схемы управления асинхронными электродвигателями
электродвигатель асинхронный б у
трехфазный ток асинхронный электродвигатель
электродвигатели асинхронные преобразователем
схема пуска асинхронного электродвигателя
электродвигатель асинхронный взрывозащищенный
электродвигатель асинхронный размеры
электродвигатель асинхронный 1 квт
подключить асинхронный электродвигатель
асинхронные электродвигатели видео
однофазные асинхронные электродвигатели купить
асинхронный электродвигатель 4 квт
электродвигатели асинхронные 220 вольт
электродвигатель асинхронный 2.2 квт
включение асинхронного электродвигателя
высокомоментные электродвигатели
неисправности асинхронных электродвигателей
асинхронный электродвигатель момент
электродвигатель асинхронный 4а
двухскоростные асинхронные электродвигатели
режимы работы асинхронных электродвигателей
асинхронный электродвигатель 2 2 квт
асинхронные реверсивные электродвигатели
регулятор оборотов асинхронного электродвигателя
привод асинхронного электродвигателя
продаем асинхронные электродвигатели
параметры асинхронных электродвигателей
асинхронный электродвигатель регулирование
таблица асинхронных электродвигателей
эксплуатация электродвигателей асинхронных
проверка асинхронного электродвигателя
асинхронный тяговый электродвигатель
асинхронный электродвигатель как генератор
асинхронный электродвигатель применение
устройство ротора асинхронного электродвигателя
частотное управление асинхронными электродвигателями
перемотка асинхронного электродвигателя
асинхронный электродвигатель назначение
асинхронные электродвигатели производители
подключение асинхронного электродвигателя на 380
электродвигатель асинхронный трехфазный типы
механическая характеристика асинхронного электродвигателя
асинхронный электродвигатель постоянного тока
конструкция асинхронного электродвигателя
схемы включения асинхронных электродвигателей
высокомоментные электродвигатели постоянного тока
тихоходные высокомоментные электродвигатели
высокомоментный электродвигатель купить
тихоходные высокомоментные электродвигатели siemens
схемы соединения обмоток высокомоментных электродвигателей
высокомоментные электродвигатели
Коэффициент востребованности 815
xn--80aaafltebbc3auk2aepkhr3ewjpa.xn--p1ai
Высокомоментные и малоинерционные двигатели постоянного тока — Студопедия.Нет
Высокомоментные двигатели постоянного тока
С развитием робототехники и гибких перестраиваемых систем в ряде электроприводов необходимы двигатели, способные работать при относительно низких частотах вращения, для случаев, когда необходимы относительно низкие скорости и значительных перегрузочных моментах. Разработаны высокомоментные двигатели.
Электромагнитный момент двигателя:
М=Се Ф Iя
Больший момент можно создать либо увеличивая магнитный поток возбуждения Ф, либо ток якоря Iя.
С развитием ферромагнитных материалов в последнее время появились относительно дешевые ферритовые магниты, обладающие большими силой, остаточной индукцией и удельной энергии.
Такие материалы позволили создать высокомоментные двигатели постоянного тока с возбуждением от постоянных магнитов. По своим пусковым, рабочим и регулировочным свойствам они практически не отличаются от двигателей с электромагнитным возбуждением, однако имеют больший поток Ф, более высокий КПД из-за отсутствия потери на возбуждение. Основной поток не зависит от изменения окружающей температуры. К таким двигателям относятся широко распространенная серия ДПМ.
Увеличить ток якоря Iя можно за счет другой конструкции машины. Вместо машин, у которых якорная обмотка находится в пазах якоря, появились машины с безпазовым якорем, собираемых из листов электротехнической стали без пазовых отверстий, т.е. имеющих гладкую поверхность. Катушки обмотки укладывают на поверхность гладкого якоря, и укрепляется эпоксидной смолой с ферромагнитным наполнителем и бандажами. В таких обмотках лучшее охлаждение, поэтому можно пропускать большой ток.
Кроме того, отсутствие зубцов, которые насыщаются быстрее, чем основной …. позволяет повысить индукцию в воздушном зазоре машины. Следовательно, можно увеличить магнитный поток и вращающий момент.
Т.о. увеличивая магнитный поток возбуждения и ток якоря, получают высокомоментные двигатели. К таким двигателям, например, относятся двигатели серии МИГ. Это двигатели с гладким безпазовым якорем.
Малоинерционные двигатели с печатной обмоткой якоря
Одним из важнейших требований, предъявленных малоинерционным электроприводам, является быстродействие. Быстродействие привода в значительной мере определяется быстродействием двигателя, которые тем выше, чем меньше момент инерции ротора.
Малоинерционные двигатели постоянного тока выпускаются в двух исполнениях: с полным немагнитным якорем и дисковым. Эти конструкции характерны только для микродвигателей (до 750 Вб) и отчасти малой мощности (до 2 кВт).
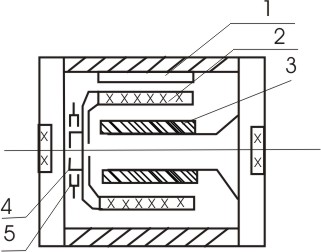
Якорь ДПО представляет собой укрепленный на валу тонкий диск из механически прочного и нагревостойкого изоляционного материала.
На обеих сторонах диска методов печатного монтажа нанесены плоские тонкие медные проводники обмотки.
Радиальные участки (1) проводников образуют активную зону обмотки. Изогнутые части 2 проводников вблизи кромки и центра дискового якоря, необходимые для соединения активных проводников, образуют лобовые части обмотки, которые, будучи нанесенными, на противоположные стороны диска, соединяются между собой через гальванизированные отверстия (3). Толщина печатного проводника значительно меньше его ширины. Поверхность печатных проводников, обращенная в сторону торцевых воздушного якоря сравнительно велика и лишена изоляции.
Поэтому охлаждение печатного проводника значительно лучше. В длительном режиме допустимая плотность тока в печатных обмотках составляет 30-40 А/мм2, а в импульсном 100-150 А/мм2. Магнитный поток возбуждения создается постоянными магнитами с полостными наконечниками установленными с одной стороны диска. С другой стороны устанавливается кольцо из магнитомягкого материала, являющейся второй частью магнитопровода.
Роль коллектора могут играть неизолированные участки проводников, находящиеся на поверхности диска, по которым скользят щетки.
Момент инерции дискового якоря значительно меньше момента инерции барабанного якоря, что является основным преимуществом рассматриваемых двигателей.
Один из недостатков этой конструкции двигателей является относительно быстрый износ диска из-за малой толщины плоской печатной обмотки, по которой скользят щетки.
Этот недостаток устраняется или снабжением двигателя запасным диском, либо изготовлением дискового якоря с коллектором.
Разновидностью двигателей с печатной обмоткой является двигатель с цилиндрическим якорем, который изготавливается в виде полного цилиндра из изоляционного материала, по обе стороны которого (наружной и внутренней) наносятся соединения между собой части линейчатых обмотки. Концы секущей обмотки выводятся к коллектору, расположенному на валу двигателя. Якорная обмотка может быть выполнена из медного провода и запрессовывается.
 Возбуждение двигателя осуществляется от расположенного внутри якоря двухполосного цилиндрического постоянного магнита.
Возбуждение двигателя осуществляется от расположенного внутри якоря двухполосного цилиндрического постоянного магнита.
3-постоянный магнит — внутренний статор
1-магнитный маятник- внешний статор
2-якорь — полый цилиндр
4- коллектор; 5-щетки
Благодаря такой конструкции эти двигатели имеют более высокий КПД, больший срок службы, и меньшую электромеханическую постоянную времени. Типичный представитель – двигатель серии ДПР.
Положительные качества исполнительных двигателей с дисковым и цилиндрическим якорем
1.Большая технологичность якоря (печатный).
2.Малый момент инерции.
3.Отсутствие потерь в стали двигателя, т.к. вращающийся якорь не имеет ферромагнитных частей.
4.Хорошая безыскровая коммутация в следствие малой самоиндукции и взаимоиндукции коммутируемых секций.
5.Хорошее охлаждение.
6.Высокий КПД при возбуждении от постоянных магнитов.
К недостаткам малоинерционных двигателей с печатными обмотками относятся:
1.Большой намагничивающий промежуток на пути магнитного потока;
2.Недостаточная механическая прочность якорей;
3.Ограничения числа витков (как следствие либо низкое питающее напряжение либо большие скорости).
studopedia.net
93.Высокомоментные электродвигатели
Электрические моментные двигатели постоянного тока широко используются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники.
Теория, разработка и применение этих двигателей в последние годы получили значительное развитие.
Разработчики различных систем управления при выборе исполнительного двигателя сталкиваются с рядом задач. Это –определение целесообразности применения моментных двигателей, которые наряду с крупными достоинствами нередко имеют значительно большие энергопотребление и массу, чем быстроходные двигатели с редуктором. Кроме того, это выбор структуры и значений параметров системы управления при условии сравнительно большой электромеханической постоянной времени. При проектировании моментных двигателей для конкретной системы необходимо выбирать технические данные на его разработку по известным характеристикам нагрузки и входного воздействия, а также, исходя из требований к системе, выбирать конструкцию двигателя, выполнять необходимые расчеты.
Целью настоящего проекта является разработка универсального лабораторного стенда для исследования высокомоментного двигателя.
1 ОСНОВНЫЕ ПОЛОЖЕНИЯ
Моментным двигателем (МД) называется электромеханический преобразователь, на вход которого подается электрический сигнал постоянного или переменного тока, а выходом является электромагнитный момент, при котором в рабочем режиме ротор либо неподвижен, либо вращается с весьма малой скоростью.
Рисунок 1
-
-
Область применения МД
-
-
-
-
В коррекционных устройствах гидросистем (для компенсации возмущающих моментов, вызывающих прецессию оси гироскопа).
-
В стабилизирующих устройствах (система управления положением разных более крупных объектов: антенна, прицел и т.п.).
-
В устройствах силовой компенсации (в системах с отрицательными о.с.).
-
Используются в качестве электрических пружин.
-
Используют в качестве натяжных устройств, чтобы регулировать или сохранять неизменной силу натяжения провода, ленты, цепи и т.п.
-
В качестве поворотных электромагнитов управляющих заслонками, клапанами, тормозными устройствами и т.п.
-
В тиристорных, транзисторных электроприводах (далее ЭП) и в приводах подач металлорежущих станков.
-
-
-
Основные требования к МДПМ
-
Заданный диапазон углов поворота ротора.
-
Заданная зависимость момента от положения ротора1.
-
Заданная зависимость момента от сигнала, подаваемого в ОУ. В большинстве случаев эта зависимость линейная.
-
Отношение, что особенно важно при маломощных источниках питания. С увеличением Mэм и размеров МДПМ потребляемая мощность на единицу момента обычно уменьшается.
-
При отсутствии тока в ОУ, остаточный момент должен быть весьма мал (вообще отсутствовать).
-
Tэм, Tэ должны быть как можно меньше. Большие постоянные времени снижают быстродействие и могут привести к неустойчивости следящей системы.
-
Чувствительность, определяемая наименьшей мощностью сигнала, на которую система начинает реагировать, должна быть высокой.
-
Масса и габариты ® min.
-
Устойчивость по отношению к внешним воздействиям (температура, вибрация, удары, давление, влажность, ускорение, радиация и т.п.).
-
Достоинства высокомоментного двигателя
-
Благодаря отсутствию обмотки возбуждения (ОВ) и потерь в этих обмотках машины с постоянными магнитами имеют по сравнению с машинами электромагнитного возбуждения более высокий КПД, облегченные условия охлаждения.
-
Малые габариты и масса.
-
Более стабильное возбуждение (поток постоянных магнитов не зависит ни от частоты вращения ни от напряжения ни от температуры).
-
Простота конструктивного исполнения, когда магнитная система представляет собой намагниченное определенным образом кольцо из магнитотвердого материала.
-
Наличие постоянных магнитов (ПМ) обеспечивает высокие значения углового ускорения в переходных режимах работы.
-
Наличие ПМ обеспечивает равномерный ход при малых частотах вращения.
-
Наличие ПМ обеспечивает способность выдерживать большую перегрузку по току без размагничивания магнитной системы.
-
Недостатки высокомоментного двигателя
-
Напряжение генераторов и частоту вращения двигателей невозможно регулировать изменением поля возбуждения.
-
При мощности более десятков ватт они уступают по габаритным размерам, массе и стоимости машинам электромагнитного возбуждения.
-
Материалы, входящие в состав сплавов для ПМ дефицитны.
-
Технология изготовления и намагничивания ПМ отличается большой сложностью.
-
Существенное размагничивающее действие МДС якоря.
-
Запрещается в МДПМ вытаскивать ротор без замены его на какое-нибудь металлическое тело таких же размеров.
1.5 Конструктивные разновидности высокомоментного двиателя
Следует отметить, что у некоторых МД с неограниченным углом поворота ротора частота вращения в установившемся режиме может оказаться довольно значительной (в таких случаях нельзя провести четкую грань между МД и тихоходным двигателем). Однако если этот МД используется в следящей системе, и он, работая в режиме частых пусков и реверсов, в основном вращается с малой частотой; следовательно, и в этом случае также можно считать, что энергия, подводимая из сети, почти полностью выделяется в виде тепла в обмотках. МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .
Если МД работает в режиме слежения, то его роль аналогична роли быстроходного исполнительного двигателя в сочетании с редуктором. Однако МД, нередко обладая большими, чем у редукторного привода, энергопотреблением, массой и электромеханической постоянной времени, имеет по сравнению с редукторным приводом весьма существенные преимущества. К ним относятся высокая разрешающая способность МД вследствие отсутствия неизбежных в редукторе МД постоянного тока широко применяются в качестве исполнительных элементов в современных системах автоматики, телемеханики, измерительной техники. Эти двигатели используются в гироскопах и акселерометрах, в приводах антенн, телескопов, фотоаппаратов, солнечных и звездных датчиков, роботов и манипуляторов; в автоматических построителях графиков; в качестве силовых компенсаторов в измерительных системах; в качестве элементов электрогидравлических и электропневматических приводов; в качестве электрических пружин поворотных электромагнитов и т. д. .
Если МД работает в режиме слежения, то его роль аналогична роли быстроходного исполнительного двигателя в сочетании с редуктором. Однако МД, нередко обладая большими, чем у редукторного привода, энергопотреблением, массой и электромеханической постоянной времени, имеет по сравнению с редукторным приводом весьма существенные преимущества. К ним относятся высокая разрешающая способность МД вследствие отсутствия неизбежных в редукторе люфтов и трений, стабильность механических свойств при изменении условии окружающей среды, высокая резонансная частота, возможность установки на одном валу и в общем корпусе с исполнительным механизмом, простота конструкции, более высокая надежность.
МД выпускаются на моменты от нескольких десятитысячных до нескольких тысяч ньютон-метров при потребляемой мощности от долей ватт до десятков киловатт, массе до сотен килограммов, длине до 0,3 м и выше и диаметре до 1,2 м.
Качество МД тем выше, чем больше отношения момента, развиваемого МД, к объему, массе, потребляемой мощности, мощности управления, чем меньше электромагнитная и электромеханическая постоянные времени, а также чем меньше остаточный момент (момент трогания) при нулевом сигнале, возникающий в МД вследствие трения, гистерезиса, неравномерности воздушного зазора, неоднородности магнитных материалов и несбалансированности ротора.
МД могут классифицироваться по их назначению, принципу действия, роду тока, а также по конструктивному выполнению: одноименнополюсные или разноименнополюсные, с радиальным воздушным зазором или торцевые, с неподвижной (барабанной, кольцевой) или подвижной обмоткой, с зубцовопазовой зоной или беспазовые (с гладким якорем), коллекторные или вентильные, с ограниченным или неограниченным углом поворота и т. д. .
Ниже приведены классификация МД в зависимости от их назначения и краткие сведения об областях их применения.
В гироскопах, акселерометрах и в других устройствах широко применяются коррекционные МД. В указанных устройствах, находящихся, например, на борту летательного аппарата (ЛА), ось ротора гироскопа под влиянием механических сопротивлений, изменения в процессе полета географических координат положения летательного аппарата и из-за вращения Земли может изменить свое положение относительно заданного. Задача коррекционного МД заключается в том, чтобы компенсировать соответствующие моменты, вызывая прецессию оси гироскопа, или создать прецессию оси, обеспечивающую неизменность положения оси гироскопа относительно неподвижной системы координат. Момент коррекционных МД невелик и обычно составляет от нескольких десятитысячных до нескольких тысячных, а иногда до нескольких сотых ньютон-метра. Для уменьшения компонента остаточного момента, вызванного гистерезисом, коррекционные МД постоянного тока с электромагнитным возбуждением в некоторых гироскопических системах снабжаются размагничивающими обмотками переменного тока.
В многочисленных системах управления положением различных более крупных объектов (антенны, телескопа, фотоаппарата, солнечного или звездного датчика, роботов, манипуляторов и т. д.) применяются стабилизирующие МД, развивающие значительно большие моменты. При отклонении объекта от заданного положения МД создает момент, воздействующий на какую-либо ось или платформу н возвращающий объект в нужное положение. Иногда такие МД одновременно выполняют функции поворотных элементов при переводе объекта из одного углового положения в другое.
Нередко МД используются в качестве силовых компенсаторов в измерительных системах с отрицательной обратной связью. Так, в некоторых манометрах изменение положения мембраны под влиянием повышения или понижения контролируемого давления преобразуется в электрический сигнал, который после усиления подается в обмотку управления (ОУ). При этом в МД возникает момент, удерживающий мембрану в нейтральном положении. По величине тока подаваемого в ОУ, можно судить о значении контролируемого давления.
В некоторых системах измерения и автоматики МД используются в качестве электрических пружин, заменяя собой механические. Нередко МД применяются в качестве натяжных устройств, позволяющих регулировать или сохранять неизменной силу натяжения ленты, пленки и т. д. Некоторые МД используются в автоматических построителях графиков.
МД широко применяются в различных пневмо- и гидросистемах, где oни обычно работают в пропорциональном режиме (на ротор МД помимо электромагнитной силы влияет противодействующая сила, создаваемая механической пружиной или электромагнитным способом, так что каждому значению сигнала, подаваемого в ОУ, соответствует определенное положение ротора).
Нередко МД используются в качестве поворотных (или линейных) электромагнитов, управляющих различными кранами, защелками и т. д. При подаче сигнала в ОУ такие МД обычно осуществляют перемещения, строго зафиксированные по значению.
Наконец, к МД относятся электромеханические узлы многих измерительных, оптических и других приборов, у которых момент, развиваемый двигателем, уравновешивается механической пружиной, а выходом прибора является угол поворота, зависящий от сигнала, подаваемого в ОУ.
В зависимости от принципа действия МД могут выполняться как момент двигатели с постоянными магнитами (магнитоэлектрические), как реактивные (с электромагнитным или комбинированным возбуждением) и как электродинамические. Принцип работы моментного двигателя с постоянными магнитами (МДПМ) основан на взаимодействии между током в ОУ и полем постоянного магнита (ПМ). Существенным достоинством МДПМ является сравнительно малое потребление мощности на единицу момента, так как основной магнитный поток этого двигателя обеспечивается с помощью ПМ. Зависимость электромагнитного момента МДПМ от сигнала, подаваемого в ОУ, близка к линейной. Обмотка управления МДПМ питается постоянным током; при изменении полярности питающего напряжения меняется знак момента. МДПМ без магнитно-мягких полюсных наконечников постоянных магнитов обладает малой электромагнитной постоянной времени, так как поток ОУ должен проходить через зоны большого магнитного сопротивления; в целях уменьшения электромагнитной постоянной времени (а также зубцовой пульсации момента) используют гладкий статор с беспазовой активной зоной. К недостаткам МДПМ следует отнести некоторую сложность конструкции.
Электромагнитный МД имеет явнополюсный ротор, выполненный из магнитно-мягкого материала, и по принципу действия является реактивным. При подаче тока в ОУ такого электродвигателя ротор начинает поворачиваться в сторону максимальной проводимости магнитному потоку. Принцип действия электромагнитного МД налагает ограничения на значение углового смещения ротора относительно статора, хотя при соответствующем конструктивном исполнении оно может достигать 150 градусов. Потребление мощности на единицу момента такого МД обычно больше, чем у МДПМ (за исключением электромагнитов с весьма малым углом поворота ротора). Конструктивно электромагнитный МД достаточно прост, однако обеспечить линейную зависимость его момента от сигнала, подаваемого в ОУ, невозможно. Нельзя осуществить и строгое постоянство момента по углу поворота ротора. Индуктивность ОУ велика, вследствие чего велика и электромагнитная постоянная времени. Знак момента не зависит от направления тока в ОУ, поэтому МД нередко нуждается в возвратной пружине или в сдвоенной конструкции. Питание ОУ может выполняться как постоянным, так н переменным током.
У поляризованного МД поток в зонах взаимодействия статора и ротора создается совместно с ПМ и ОУ. Явнополюсный ротор выполняется магнитно-мягким или же содержит ПМ. В одних воздушных зазорах моментных двигателей МДС ПМ и ОУ, а следовательно, и соответствующие индукции направлены согласно, а в других—встречно; в результате возникает реактивный вращающий момент, направленный в сторону уменьшения магнитного сопротивления тех воздушных зазоров, в которых индукции складываются. Питание ОУ осуществляется постоянным током: для реверсирования МД надо изменить направление тока в ОУ. Диапазон углов поворота ротора обычно составляет несколько градусов. При небольших отклонениях ротора от среднего положения момент пропорционален току ОУ и мало зависит от угла поворота ротора. Так как основная доля в суммарном потоке такого МД приходится на поток постоянного магнита, потребляемая мощность на единицу момента, а также электромагнитная постоянная времени значительно меньше, чем у электромагнитного МД.
Принцип действия электродинамических МД основан на взаимодействии двух обмоток с током, при этом если хотя бы одна из обмоток размещена на сердечнике из магнитно-мягкого материала, то МД называют ферродинамическими. Эти МД отличаются сравнительно большим потреблением мощности на единицу момента. Обмотки таких МД могут питаться как постоянным, так и переменным током. Зависимость момента от тока ОУ линейна. Для изменения знака момента МД, питаемого постоянным током, надо изменить полярность напряжения, подаваемого на ОУ, а момента МД, питаемого переменным током, — фазу этого напряжения.
Наибольшее распространение среди МД постоянного тока получили МДПМ.
МДПМ с ограниченным углом поворота ротора характеризуется тем, что ось МДС обмотки управления при различных положениях ротора меняет свое положение по отношению к оси ПМ.
Конструктивно МДПМ могут выполняться как нормального (ОУ размещается под индуктором), так и обращенного исполнения, при этом ОУ может находиться как на роторе, так и на статоре. Зависимость электромагнитного момента от сигнала, подаваемого в ОУ, достаточно близка к линейной. За счет полюсных наконечников или геометрии воздушного зазора можно в случае необходимости получить требуемую закономерность изменения момента по углу поворота ротора. В частности, можно добиться практической независимости момента от положения ротора при данном сигнале в ОУ. При разнополярном симметричном потоке в воздушном зазоре в МДПМ с р парами полюсов и условии независимости момента от положения ротора диапазон углов поворота ротора не может превышать 360°/2p (практически при р=1 не более 120— 130 градусов). При однополярном потоке соответствующий диапазон углов может достигать 260—270 градусов. Если угол поворота ротора не превышает нескольких градусов, то МДПМ может быть выполнен по типу обычного двигателя постоянного тока, но с питанием якорной обмотки через гибкие токопроводы.
МДПМ с неограниченным углом поворота ротора характеризуется тем, что ось МДС обмотки управления при различных положениях ротора сохраняет
почти неизменное положение по отношению к оси ПМ за счет коммутациитоков в секциях ОУ. Момент линейно зависит от сигнала в ОУ и почти не зависит от положения ротора.
Примером МДПМ с неограниченным углом поворота ротора может служить многополюсная магнитоэлектрическая коллекторная машина с обмоткой якоря волнового типа. Недостатки коллекторных электродвигателей, которые, как правило, связывают с малой надежностью щеточно-коллекторного узла и радиопомехами, вызываемыми искрением из-под щеток при коммутации секций, в отношении коллекторных МДПМ, работающих в заторможенном режиме, не так явно выражены. Применение волновой обмотки позволяет установить любое (вплоть до р) число пар щеток, что обеспечивает достаточно высокую надежность МД даже при значительных вибрациях и тряске. Естественная многофазностьколлекторных МДПМ делает их самыми точными (с точки зрения угловой стабильности момента) среди моментных приводов на постоянном токе.
В тех случаях, когда по условиям эксплуатации применение коллекторных МДПМ недопустимо, находят широкое применение вентильные МД, секции которых подключаются к сети с помощью полупроводниковых ключей (вентилей). Указанные электродвигатели имеют, как правило, обращенное исполнение с размещснием индуктора на роторе. Коммутация токов в секциях ОУ вентильных МДПМ может осуществляться как дискретно, так и непрерывно. Дискретная МДПМ может осуществляться как дискретно, так и непрерывно. Дискретная коммутация осуществляется с помощью датчиков положения ротора (датчиков Холла, трансформаторных, индукционных и др.), управляющих полупроводниковыми ключами, которые подключают к сети постоянного тока трех- или четырехфазную статорную обмотку. Однако у таких МД имеют место значительные пульсации момента по углу поворота ротора (достигающие 10—15 %), вызываемые как коммутационными процессами при переключении фаз, так и дискретными ми поворотами МДС статора. При увеличении количества тактов за один оборот ротора пульсации момента уменьшаются, однако возрастает число датчиков положения или усложняется схема. Непрерывная коммутация осуществляется с помощью синусно-косинусных вращающихся трансформаторов (СКВТ), управляющих токами ОУ МДПМ через фазочувствительные усилители-преобразователи (ФЧУП). В некоторых случаях для непрерывной коммутации используются датчики Холла или емкостные датчики.
Ротором МДПМ с ограниченным или неограниченным углом поворота может быть сама ОУ, размещенная на каркасе из немагнитного материала; в этом случае электромеханическая, а также электромагнитная постоянные времени МДПМ весьма малы, а момент, обусловленный гистерезисом или неравномерностью воздушного зазора, отсутствует. При этом в связи с большим воздушным зазором уменьшается индукция в зазоре и возрастает поток рассеяния.
1.6 Математическое описание ВМД в электромеханических системах
1.7 Принцип действия ВМД
Источником поля возбуждения в ВМД ПТ (МДПМ) является постоянный магнит. На обмотку статора (ротора) подводят постоянное напряжение.
Ток, протекающий в обмотке двигателя, взаимодействуя с магнитным полем постоянного магнита, создает вращающий момент. Когда Mэ>Mс двигатель начнет вращаться.
1.8 НАГРЕВ ДПТ.
При работе двигателя из-за потерь повышается его внутренняя температура. После запуска ЭД и приложения к нему постоянной нагрузки его температура возрастает по закону, близкому к экспоненциальному и достигает установившегося значения, как это показано на рисунке 1.8.1 .
Время, за которое температура достигает 63 процента от своего максимального значения называется тепловой постоянной времени.
Превышение температуры DТ определяется разностью между Тдв и Тохл.ср.:
Рисунок 1.8.1 — График роста температуры во время работы электродвигателя.
При значительном увеличении температуры ЭД происходит ускоренное старение его изоляции, а также могут выйти из строя подшипники и коллектор. Предельное DТ определяется классом изоляции двигателя согласно таблице 1.8.1 .
Свойства изоляции ухудшаются по трем основным причинам:
– За счет нагрева.
Связь между температурой и сроком службы изолятора апроксимируется следующими выражениями:
,
где L – срок службы, лет;
Q – температура изоляции, °С
а,m – константы, зависящие от материала.
– За счет нагрева.
Коэффициент поверхностного сопротивления уменьшается, а утечка тока увеличивается, когда поверхность электроизоляционного материала впитывает воду. При впитывании воды диэлектриком, уменьшается коэффициент его объемного сопротивления, а потери увеличиваются. Высокая влажность вызывает также химическую деформацию материала из-за растяжения, разбухания и роста плесени, что в свою очередь, способствует дальнейшему ухудшению свойств изоляции.
Таблица 1.8.1 – Классы изоляции
|
Класс изоляции |
DТ,°С |
Предельно допустимая температура, °С |
Материал изоляции |
|
A |
50-60 |
105 |
Хлопок, шелк, бумага, поливинил |
|
E |
65-75 |
120 |
Эмалевая или полистирольная пленка |
|
B |
70-80 |
130 |
Слюда, стекловолокно с соответствующим клеем |
|
F |
85-100 |
155 |
Стекловолокно и др. с температурно-резистивным клеем |
|
H |
105-125 |
180 |
Стекловолокно и др. с кремниевой смолой или с хорошо клеящимся материалом |
|
C |
— |
свыше 180 |
Керамические материалы |
– За счет циклического охлаждения и нагрева.
При циклическом нагреве и охлаждении свойства изоляции ухудшаются гораздо быстрее за счет механических напряжений от растяжения и сжатия, а также от нагрева.
Повышение температуры работающего двигателя продолжается до тех пор, пока выделяемое тепло не станет равным рассеиваему теплу.
Обозначим переменные:
Q – тепло, выделяемое двигателем;
С – средняя мощность двигателя;
Н – коэффициент теплового рассеивания;
DТ – превышение температуры;
t – время с момента пуска ЭД.
studfile.net
Двигатель постоянного тока: описание принципа работы, типы
В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:

Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.

В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.

Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.

Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока

Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.

Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя

Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:

и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).
Изменение направления движения двигателя постоянного тока
Хотя управление скоростью двигателя постоянного тока с помощью одного транзистора имеет много преимуществ, оно также имеет один главный недостаток: направление вращения всегда одинаковое, это «однонаправленная» схема. Во многих случаях нам необходимо управлять двигателем в обоих направлениях вперед и назад.
Для управления направлением двигателя постоянного тока необходимо поменять полярность питания постоянного тока, подаваемого на соединения двигателя, чтобы его вал вращался в противоположном направлении. Один очень простой и дешевый способ управления направлением вращения двигателя постоянного тока состоит в использовании различных переключателей, расположенных следующим образом:

В первом контуре используется одинарный двухполюсный, двухходовый переключатель (DPDT) для контроля полярности соединений двигателей. При переключении контактов подача на клеммы двигателя изменяется, и двигатель меняет направление. Второй контур немного сложнее и использует четыре однополюсных, одноходовых (SPST) переключателя, расположенных в «H» -конфигурации.
Механические переключатели расположены в виде пары переключений и должны работать в определенной комбинации для работы или остановки двигателя постоянного тока. Например, комбинация переключателей A + D управляет вращением вперед, в то время как переключатели B + C управляют вращением назад, как показано на рисунке. Комбинации переключателей A + B или C + D замыкают клеммы двигателя, вызывая его быстрое торможение. Тем не менее, использование переключателей таким образом имеет свои опасности, так как рабочие переключатели A + C или B + D вместе отключат источник питания.
В то время как две вышеупомянутые схемы будут очень хорошо работать для большинства небольших двигателей постоянного тока, мы действительно хотим использовать различные комбинации механических переключателей только для изменения направления вращения двигателя, НЕТ! Мы могли бы изменить ручные переключатели для набора электромеханических реле и иметь одну кнопку прямого или обратного хода или даже использовать твердотельный четырехпозиционный двусторонний переключатель CMOS 4066B.
Но еще один очень хороший способ достижения двунаправленного управления двигателем (а также его скоростью) состоит в том, чтобы подключить двигатель к схеме транзисторного типа H-моста, как показано ниже.
H-мостовая схема двигателя

Схема H-моста, приведенная выше, названа так потому, что базовая конфигурация четырех переключателей, либо электромеханических реле, либо транзисторов, напоминает букву «H» с двигателем, расположенным на центральной шине. Транзистор или МОП-транзистор является, вероятно, одним из наиболее часто используемых типов двунаправленных цепей управления двигателем постоянного тока. Он использует «комплементарные пары транзисторов» как NPN, так и PNP в каждой ветви, причем транзисторы попарно объединяются для управления двигателем.
Управляющий вход A управляет двигателем в одном направлении, т.е. вращением вперед, в то время как вход B управляет двигателем в другом направлении, т.е. обратным вращением. Затем переключение транзисторов «ВКЛ» или «ВЫКЛ» в их «диагональных парах» приводит к направленному управлению двигателем.
Например, когда транзистор TR1 включен, а транзистор TR2 выключен, точка A подключена к напряжению питания (+ Vcc), а если транзистор TR3 выключен, а транзистор TR4 включен, точка B подключена к 0 вольт (GND). Затем двигатель будет вращаться в одном направлении, соответствующем положению клеммы А двигателя и положительной клемме В двигателя.
Если состояния переключения меняются местами так, что TR1 — «ВЫКЛ», TR2 — «ВКЛ», TR3 — «ВКЛ» и TR4 — «ВЫКЛ», ток двигателя будет течь в противоположном направлении, вызывая вращение двигателя в противоположном направлении.
Затем, применяя противоположные логические уровни «1» или «0» к входам A и B, направление вращения двигателя можно регулировать следующим образом.
Таблица истинности H-моста
| Вход А | Вход B | Функция двигателя |
| TR1 и TR4 | TR2 и TR3 | |
| 0 | 0 | Двигатель остановлен (OFF) |
| 1 | 0 | Мотор вращается вперед |
| 0 | 1 | Мотор вращается задним ходом |
| 1 | 1 | НЕ ПОЛОЖЕНО |
Важно, чтобы никакая другая комбинация входов не допускалась, так как это может привести к короткому замыканию источника питания, то есть оба транзистора, TR1 и TR2, были включены в одно и то же время (предохранитель = взрыв!).
Как и в случае однонаправленного управления двигателем постоянного тока, как показано выше, скорость вращения двигателя также можно регулировать с помощью широтно-импульсной модуляции или ШИМ. Затем, комбинируя переключение Н-моста с ШИМ-управлением, можно точно контролировать направление и скорость двигателя.
Имеющиеся в продаже готовые ИС- декодеры, такие как четырехполупроводниковая ИС H-моста SN754410 или L298N с двумя H-мостами, доступны со всей необходимой встроенной логикой управления и безопасности, специально разработанные для двунаправленных цепей управления двигателем H-моста.
meanders.ru
Высокомоментный электродвигатель — Большая Энциклопедия Нефти и Газа, статья, страница 1
Высокомоментный электродвигатель
Cтраница 1
Высокомоментный электродвигатель — это электродвигатель постоянного тока, у которого вместо электромагнитного возбуждения используют возбуждение от постоянных магнитов. Высо-комоментные электродвигатели применяют в электроприводах подач станков с числовым программным управлением. Они позволяют получать большие крутящие моменты при непосредственном соединении с ходовым винтом без промежуточных передач. Благодаря наличию возбуждения от постоянных магнитов, эти двигатели выдерживают значительные перегрузки и отличаются высоким быстродействием, так как способны кратковременно развивать большой ( 50 — 20-кратный) крутящий момент при малых частотах вращения. Отсутствие обмотки возбуждения, нагревающейся при работе двигателя с электромагнитным возбуждением, обусловливает меньший нагрев двигателя с постоянными магнитами. [1]
Высокомоментные электродвигатели ( ВМЭД) — относительно тихоходные двигатели постоянного тока с возбуждением от постоянных магнитов. Эти двигатели применяются в замкнутых системах ЧПУ. Структурная схема привода подач с ВМЭД показана на рис. 17.26. В приводе подач станков с ЧПУ применяют беззазорные редукторы, передающие вращение от двигателя к ходовому винту. [3]
Весьма перспективно использование малоинерционных высокомоментных электродвигателей. [4]
Для точности позиционирования используются высокомоментные электродвигатели постоянного тока, которые соединяют непосредственно с винтом подач через бесшпоночные соединения, образуя жесткую передачу без кинематической цепи. Также используются электродвигатели, мощность которых в комплекте с гидроусилителями моментов служит для управления более мощными приводами и другие устройства. [5]
Следующим направлением является разработка новых малоинер-цнонных высокомоментных электродвигателей со сравнительно низкой номинальной частотой вращения ( 800 — 1200 об / мин) без обмоток возбуждения, в которых для создания магнитного поля возбуждения применяют постоянные магниты из магнитных материалов с высокой коэрцитивной силой. Это позволило значительно снизить потери, габариты, массу и получить высокую кратность тока и момента по отношению к номинальным без размагничивания основного поля двигателя, а также получить весьма низкие частоты вращения ( 0 1 об / мин) при равномерном вращении. [6]
Повысить качество систем управления можно, используя высокомоментные электродвигатели и исключив из кинематических схем ПМ круговых движений. Схемы рис. 3.2, а, в аналогичны схемам рис. 3.1, а, б, г. В схеме рис. 3.2, б ДС и ДП присоединены к ротору двигателя через точный приборный передаточный механизм. В качестве ДП используется ВТ. [7]
Приводами движений продольной и поперечной подач служат высокомоментные электродвигатели постоянного тока: для движения продольной подачи М2, для движения поперечной MS. Регулирование скоростей подач — бесступенчатое. [8]
Перемещения всех исполнительных органов станка осуществляются от высокомоментных электродвигателей с постоянными магнитами. [9]
Привод подач МС чаще всего состоит из высокомоментного электродвигателя постоянного тока с бесступенчатым регулированием. Электродвигатель через редуктор соединяется с парой винт — гайка качения. В крупных станках вместо редуктора используют двухступенчатые коробки скоростей с электромагнитными муфтами. Применяют и гидроприводы подач. [10]
В приводах движения подачи станков с ЧПУ используют высокомоментные электродвигатели серии ПБВ с возбуждением обмотки от постоянных магнитов или двигатели постоянного тока серии 2П или ПБС с электромагнитным возбуждением обмотки. [11]
В приводе буровых лебедок первого поколения морских установок использовались тихоходные высокомоментные электродвигатели, соединяемые с валом барабана напрямую, что позволяло использовать их одновременно в качестве тормозных машин при спуске бурильных и обсадных колонн. [13]
В последнее время значительное распространение получили мотор-редукторы, которые более экономичны, чем тихоходные высокомоментные электродвигатели, они имеют более высокие КПД и пусковой момент. [14]
Для следяще-регулируемых электроприводов металлорежущих станков с числовым программным управлением ( ЧПУ) выпускают специальные малоинерционные высокомоментные электродвигатели постоянного тока с возбуждением от постоянных магнитов типа ПБВ. В двигатели встроен датчик скорости. Эти двигатели допускают более чем семикратные кратковременные перегрузки по моменту и в следяще-регулируемых тнристорных электроприводах обеспечивают регулирование скорости в диапазоне 10000: 1 с минимальной скоростью, равной 0 01 рад / с. Использование таких высокомоментных широкорегулнруемых двигателей для приводов подач станков позволяет полностью исключить не только коробку подач, но и редуктор и соединить вал двигателя непосредственно с ходовым винтом механизма подачи, что упрощает его конструкцию. Такие электроприводы и преобразователи разработаны для главных приводов и приводов подач. Для приводов подач выпускают тиристорные электроприводы мощностью 0 1 — 11 кВт с регулированием скорости вниз от основной, изменяя напряжение на якоре двигателя. В приводах используют электрические двигатели серий СЛ, ПС, ПСТ, ПБСТ, 2П, ПГТ и с печатным якорем. Для электроприводов подач станков с ЧПУ выпускают следяще-регулируемые электроприводы мощностью 0 18 — 9 кВт с двигателями серий ПБВ и с печатным якорем. Эти приводы имеют следящую систему и регулируемый тиристор-ный преобразователь. [15]
Страницы: 1 2
www.ngpedia.ru
| Наименование | Характеристики | Назначение | Изображение |
|
Вентильный |
Момент на валу: 15 Н∙м Мощность: 100 Вт Напряжение: 27 В Точность позиционирования по углу: 1,6´ Встроенный датчик положения |
Системы |
|
|
Высокомоментный |
Момент на валу: 1 250 Н∙м Мощность: 100 кВт Частота вращения: 150-450 об/мин Наличие гидравлической развязки вала с корпусом привода |
Электродвижитель |
|
|
Высокомоментный |
Мощность: 500 кВт Момент на валу: 2 400 Н∙м Частота вращения: 500 об/мин |
Судовой двигатель |
|
|
Высокомоментный |
Момент на валу: 60 000 Н∙м Частота вращения: 180 об/мин Внешний диаметр статора: 900 мм Высота статора: 500 мм Диапазон рабочих температур: -10… +150°С |
Верхний |
smbdb.ru
