Как работает технология LIDAR. Какие компоненты нужны для создания самодельного 3D-сканера. Как собрать и настроить лидар в домашних условиях. На что способен самодельный 3D-сканер. Какие есть ограничения у DIY-решения.
Что такое LIDAR и как работает эта технология
LIDAR (Light Detection and Ranging) — это технология получения и обработки информации об удаленных объектах с помощью активных оптических систем. Принцип работы лидара основан на измерении времени, за которое луч света достигает объекта и отражается обратно к сенсору. Зная скорость света, можно точно рассчитать расстояние до объекта.
Ключевые особенности технологии LIDAR:
- Использует лазерное излучение в видимом, ультрафиолетовом или инфракрасном диапазоне
- Позволяет получать трехмерную картину окружающего пространства
- Обеспечивает высокую точность измерений (до нескольких миллиметров)
- Работает в любое время суток и при любых погодных условиях
Области применения лидарных систем
Технология LIDAR находит применение во многих сферах:
- Картография и геодезия — создание точных 3D-карт местности
- Беспилотные автомобили — обнаружение препятствий и построение маршрута
- Робототехника — навигация роботов в пространстве
- Археология — обнаружение древних сооружений под землей
- Лесное хозяйство — оценка объема и состояния лесных массивов
- Метеорология — исследование состава атмосферы
- Городское планирование — 3D-моделирование зданий и инфраструктуры
Компоненты для создания самодельного 3D-сканера
Для сборки простейшего лидара своими руками потребуются следующие компоненты:
- Веб-камера (например, D-Link DSB C320) — для захвата изображения
- Лампа или лазерная указка — для проецирования линии на объект
- Два перпендикулярных листа картона — для создания системы координат
- Arduino NANO — для управления сканером
- Модуль с датчиком VL53L0X — для измерения расстояния
- Потенциометр и резистор — для настройки
- Электродвигатель — для вращения зеркала на 360°
- Зеркало и магнит — для отражения луча и синхронизации
Принцип работы самодельного 3D-сканера
Алгоритм работы самодельного лидара:

- Лампа или лазер проецирует линию на сканируемый объект
- Веб-камера захватывает изображение освещенного объекта
- По искажению проецируемой линии определяется форма объекта
- Arduino обрабатывает данные с камеры и датчика расстояния
- Электродвигатель вращает зеркало для сканирования всего объекта
- Программное обеспечение строит 3D-модель по полученным точкам
Сборка и настройка самодельного лидара
Основные этапы создания 3D-сканера своими руками:
- Сборка механической части — крепление камеры, лампы, листов картона
- Подключение электронных компонентов к Arduino
- Настройка и калибровка камеры в 3D-редакторе (например, Maya)
- Программирование Arduino для управления сканером
- Разработка программного обеспечения для обработки данных
- Тестирование и отладка работы системы
Возможности и ограничения самодельного 3D-сканера
Преимущества DIY-решения:
- Низкая стоимость по сравнению с готовыми устройствами
- Возможность сканировать крупные объекты (например, автомобиль)
- Гибкость настройки под конкретные задачи
- Отсутствие ограничений по материалу сканируемых объектов
Недостатки самодельного лидара:

- Невысокая точность из-за использования бытовых компонентов
- Сложность калибровки и настройки системы
- Низкая скорость сканирования по сравнению с готовыми решениями
- Ограниченные возможности по сканированию мелких деталей
Перспективы развития технологии LIDAR
Основные тенденции в развитии лидарных систем:
- Уменьшение размеров и энергопотребления устройств
- Повышение разрешающей способности и дальности действия
- Снижение стоимости компонентов
- Интеграция с другими сенсорными технологиями
- Расширение сфер применения (медицина, виртуальная реальность и др.)
Альтернативные методы 3D-сканирования
Помимо лидарных систем, существуют и другие технологии 3D-сканирования:
- Фотограмметрия — построение 3D-модели по серии фотографий
- Структурированный свет — проецирование паттерна на объект
- Контактные сканеры — физическое ощупывание поверхности объекта
- Компьютерная томография — послойное сканирование объекта
Каждый метод имеет свои преимущества и недостатки, выбор зависит от конкретной задачи и требований к точности.
Конструирование LIDAR своими руками. Часть1 / Хабр
Данная статья посвящена изучению принципов и практической реализации технологии обнаружения и определения дальности с помощью активных оптических систем (LIDAR)
LIDAR – Light Detection and Ranging – технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, применяющих явления поглощения и рассеяния света в оптически прозрачных средах.
На сегодняшний день оптические локационные системы являются наиболее распространёнными системами, привлекающих к себе внимание учёных и практиков как инструменты, обеспечивающие максимальную информативность и точность при наблюдениях и дистанционных измерениях.
Оптическая локация, представляет собой совокупность методов обнаружения, измерения координат, а также распознавания формы удалённых объектов с помощью электромагнитных волн оптического диапазона. Одной из известных оптических локационных систем является технология LIDAR.
Целью статьи является, исследование различных областей применения оптических локационных систем, более глубокое познание в их использовании, огромнейшая ценность этих систем в наше время, их дальнейшие тенденции и возможности развития. А также статья направлена на выявление современной и актуальной технологии, работающей на основе оптических локационных систем.
Технология LIDAR
Лидары – лазерные локационные оптико-электронные системы (ОЭС) активного типа, предназначенные для активного дистанционного зондирования окружающей среды с целью получения информации для решения научных, производственных, экологических и метрологических задач.
Исторически, название «лидар» соответствует латинской аббревиатуре «LIDAR» английского выражения «light identification, detection and ranging», то есть оптическое распознавание, обнаружение и локация (определение местоположения).
Лидар работает, подсвечивая цель светом и может использовать свет видимого, ультрафиолетового или ближнего инфракрасного диапазонов. Принцип действия технологии прост. Объект (поверхность) освещается коротким световым импульсом, измеряется время, через которое сигнал вернется к источнику. Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени между передачей светового импульса и его отражением, исходя из постоянной скорости света равной 299792 км/с. Измеряя этот промежуток времени можно вычислить дистанцию между лидаром и отдельной частью объекта и, следовательно, построить изображение объекта на основе его положения относительно лидара.
Принцип действия технологии прост. Объект (поверхность) освещается коротким световым импульсом, измеряется время, через которое сигнал вернется к источнику. Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени между передачей светового импульса и его отражением, исходя из постоянной скорости света равной 299792 км/с. Измеряя этот промежуток времени можно вычислить дистанцию между лидаром и отдельной частью объекта и, следовательно, построить изображение объекта на основе его положения относительно лидара.
Технология существует с 1960-х годов, когда лазерные сканеры были установлены на самолетах. Лишь в конце 1980-х годов, с появлением коммерчески жизнеспособных систем GPS, данные с лидаров стали полезным инструментом для обеспечения точных геопространственных измерений.
Практическое применение
Система чаще всего используется для геодезических задач. Геодезия является одной из самых известных областей применения технологии. Съемка используется в областях строительства, городского планирования и изучения топографии региона. При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LIDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа. Цифровая модель рельефа может иметь любую текстуру в зависимости от области применения и плотности.
Геодезия является одной из самых известных областей применения технологии. Съемка используется в областях строительства, городского планирования и изучения топографии региона. При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LIDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа. Цифровая модель рельефа может иметь любую текстуру в зависимости от области применения и плотности.
Лазерное сканирование является популярным методом обнаружения риска наводнений, накопления углерода в лесном хозяйстве и мониторинга береговой эрозии.
На сегодняшний день наиболее распространёнными сферами использования системы лидар являются приложения для географического и атмосферного картографирования. Такие организации, как USGS (Геологическая служба США), NOAA (Национальное управление океанографии и атмосферы) и NASA, десятилетиями использовали лидар для создания карт Земли и космоса.
NASA разработало для международной космической станции инструмент под названием GEDI (исследование динамики глобальной экосистемы), который обеспечивает уникальное трехмерное изображение лесов Земли и помогает предоставить информацию об углеродном цикле, который ранее не был доступен. GEDI предоставляет жизненно важную информацию о влиянии деревьев на количество углерода в атмосфере. Используя эту информацию, ученые теперь могут определить точный уровень углерода, который хранится в лесах, и количество деревьев, которые необходимо посадить, чтобы компенсировать влияние выбросов парниковых газов.
Климатологи используют лидар, чтобы исследовать состав атмосферы и изучать облака, испарения и глобальное потепление.
Ботаники применяют эту технологию, чтобы измерить постоянно меняющиеся структуры лесов Земли.
Одним из наиболее распространённых применений является полицейское оборудование для измерения скорости автомобилей.
Портативные приборы гораздо чаще используют лазеры с длиной волны 905 нм, которые недорогие, безопасные и очень эффективные.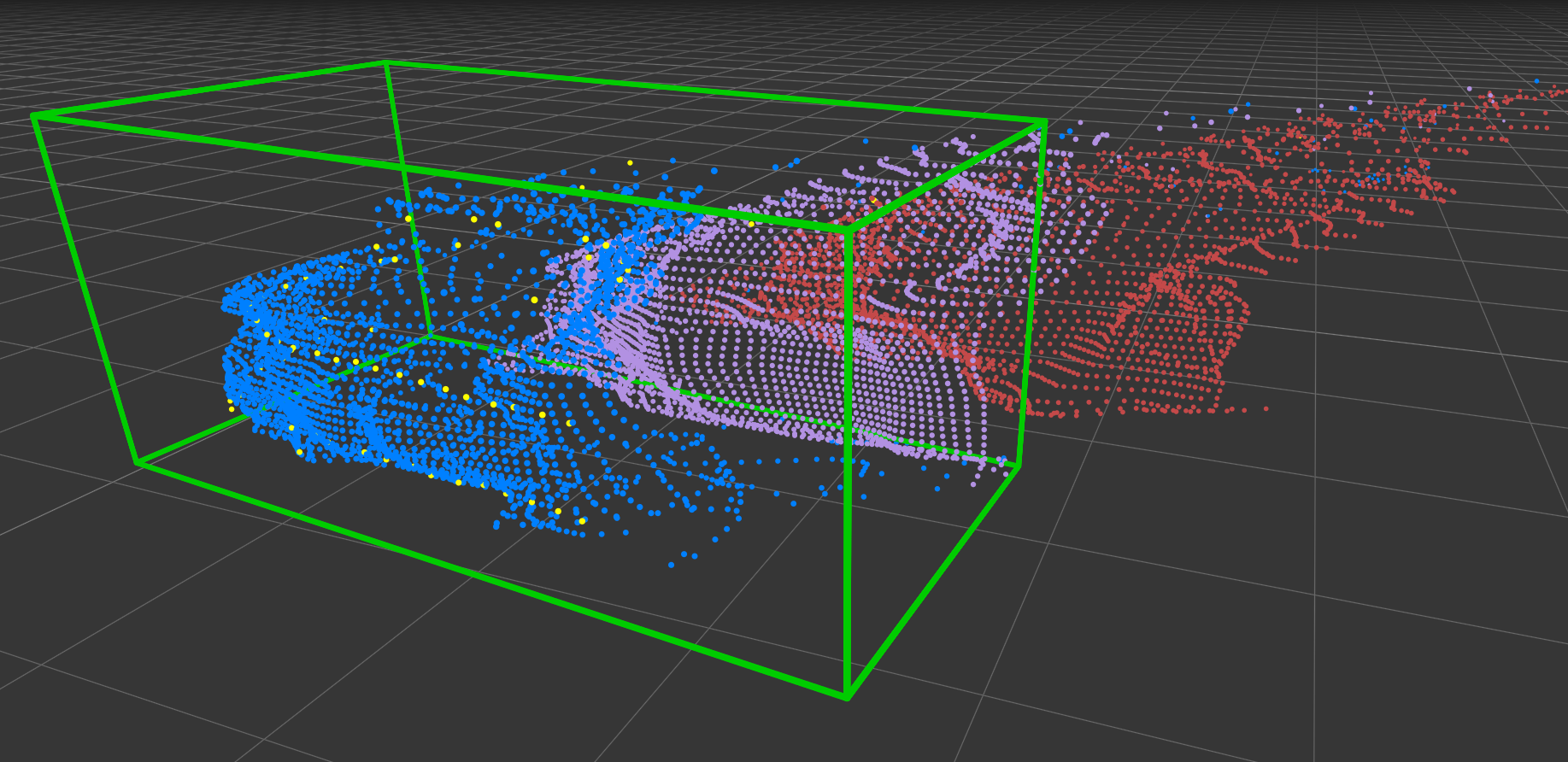
Лидар следует называть глазами автономного транспортного средства, поскольку он смотрит на окружение, вычисляет расстояние, определяет препятствия впереди, освещает объекты лазером, а затем создают цифровое изображение высокого разрешения. Он также используется для предотвращения столкновений, путем измерения расстояния между автомобилем и любым другим препятствием перед ним. Это делается путем установки модуля на бампер или крышу. Адаптивная система круиз-контроля в автономном автомобиле получает информацию от датчиков, с помощью которых она решает, когда включать тормоза, замедляться либо ускоряться.
Для исследования старых археологических раскопок, здесь лидар полезен из-за исключительной детализации, которую он может сделать. При этом экономится время, а также усилия археологов, позволяя им «воскрешать» объекты, которые раньше было практически невозможно создать. Потрясающие трехмерные изображения древнего города майя, были созданы двумя археологами с помощью лидара. Эта модель позволила совершенно по-другому взглянуть на структуру города и назначение отдельных зданий.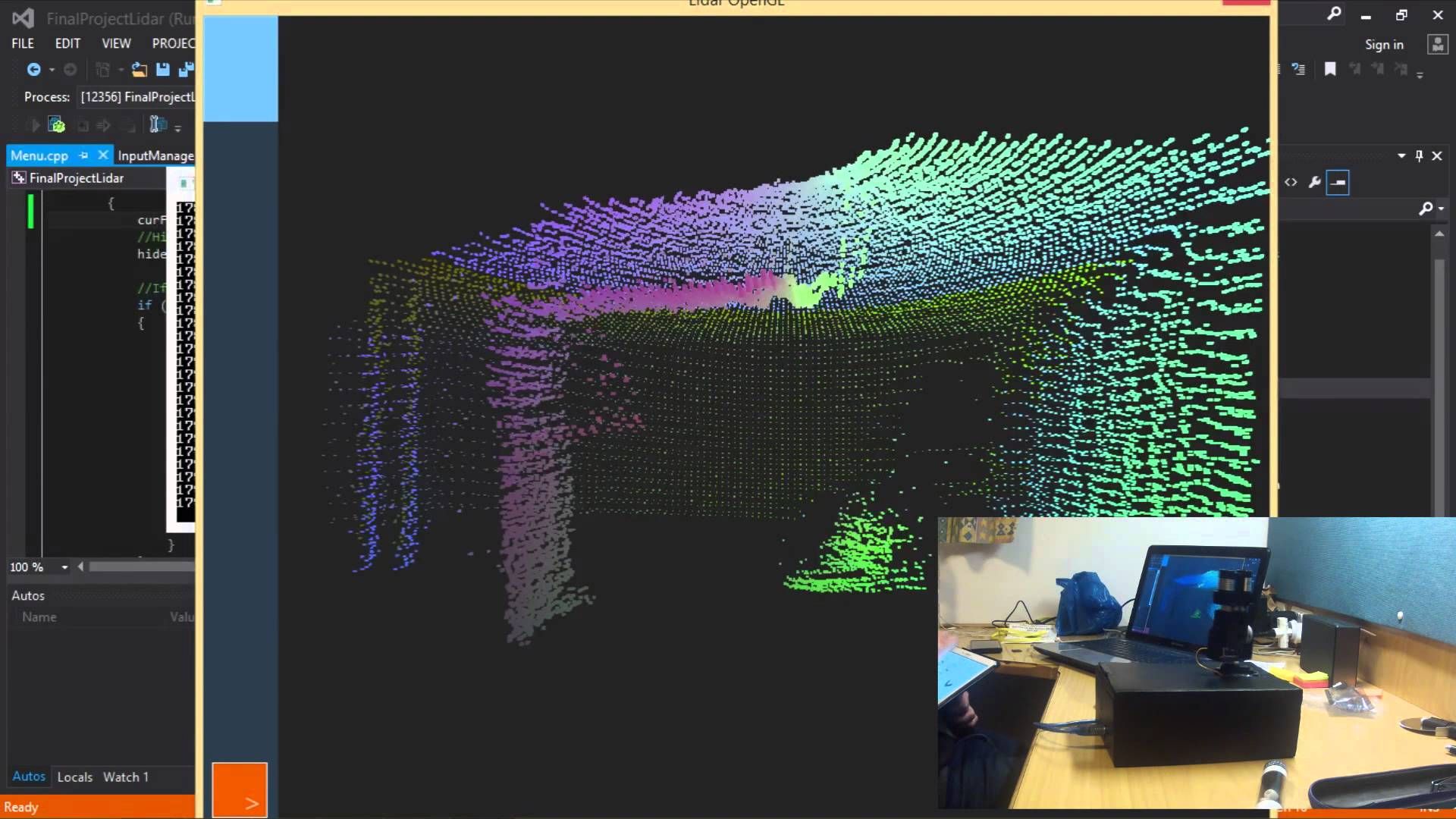
Проектирование прибора LIDAR
В этой статье будет пошагово описан процесс создания лидара своими руками. По характеристикам он несравним с коммерческими лидарами, но вполне подойдёт для небольшого простого робота, чтобы он мог обнаруживать и избегать препятствия на своём пути или более-менее точно строить карту помещения.
Схема практической реализации представлена на рисунках ниже.
Эскиз корпусаПодробный эскиз корпусаКорпус лидара можно сделать по-разному, но для проекта был разработан и выбран один из самых простых и удобных вариантов его изготовления. В нашем случает для его изготовления применялся 3D принтер. Корпус сделан так, что верхней части установлена подставка для электромотора, а также закреплены датчик Холла, магнит и зеркало (смотрите рисунки ниже).
Основной корпусОсновной корпусДатчики Холла представляют из себя твердотельные радиоэлементы, которые становятся все более популярными среди радиолюбителей и разработчиков радиоэлектронных устройств. Такие датчики являются абсолютно герметичными и представляют из себя простой радиоэлемент, они не боятся вибрации, пыли и влаги. Датчик Холла простыми словами – это радиоэлемент, который реагирует на внешнее магнитное поле.
Такие датчики являются абсолютно герметичными и представляют из себя простой радиоэлемент, они не боятся вибрации, пыли и влаги. Датчик Холла простыми словами – это радиоэлемент, который реагирует на внешнее магнитное поле.
Для вращения зеркала на 360° был использован электродвигатель, который может работать при питании от сети как постоянного, так и однофазного переменного тока.
Рисунок 6 — Вращение электродвигателяМагнит необходим для того, чтобы на него срабатывал датчик Холла и в этот момент в коде происходит установка переменной «угол» в некоторое значение. Если магнит по размерам позволяет наклеить его по центру под датчиком, это будет самый лучший вариант, т.к. при срабатывании переменной «угол» нужно будет присвоить значение 0. Если нет, магнит можно наклеить возле датчика. Тогда переменной «угол» нужно будет присвоить не 0, а соответствующее значение (на какой угол относительно магнита повёрнут датчик). Если магнит находится с противоположной стороны, нужно присвоить 180 ( в данном случае присваивается 180).
В нижней части корпуса располагаются такие компоненты, как:
Arduino NANO,
Модуль с датчиком VL53L0X,
Потенциометр на 10 кОМ,
Резистор на 10 кОМ.
Arduino — это компактная электронная плата, способная управлять различными датчиками, электродвигателями, индикацией, освещением, передавать и принимать данные.
VL53L0X использует технологию STS FlightSense для точного измерения времени, которое потребуется для испускаемых импульсов инфракрасного лазерного излучения, чтобы достичь ближайшего объекта и отразиться обратно на детектор.
Потенциометры — это регулируемые делители напряжения, которые предназначены для регулирования напряжения при неизменной величине тока, и выполненные по типу переменного резистора.
Заключение
В статье был описан процесс создания лидара своими руками.
На этом этапе мы заканчиваем конструирование лидара, во второй части статьи будет произведено программирование и создание 3D карты помещения.
3D Scanner собственными руками
Fiend3d
Высшее назначение математики состоит в том, чтобы находить скрытый порядок в хаосе, который нас окружает
Норберт Винер
Здравствуйте!
Этот материал про то, как собственными руками создать 3d Scanner. Я постараюсь на пальцах объяснить логику его работы.
Вдохновившись вот этим:
http://en.wikipedia.org/wiki/3d_scanner
захотелось тоже сделать себе такую штуковину. Точнее это один вариант решения этой задачи из бесчисленного множества. Это, конечно же, не будет сверхточным прибором, но я надеюсь, что вам будет интересно.
Что необходимо для того чтобы завести сканер:
1. Web-камера.
2. Лампа.
3. Два квадратных листа перпендикулярных друг другу.
Web-камеры сейчас стоят очень дешево: обошлась мне в 600 р. (D-Link DSB C320). Разумеется, что чем лучше камера, тем лучше результаты.
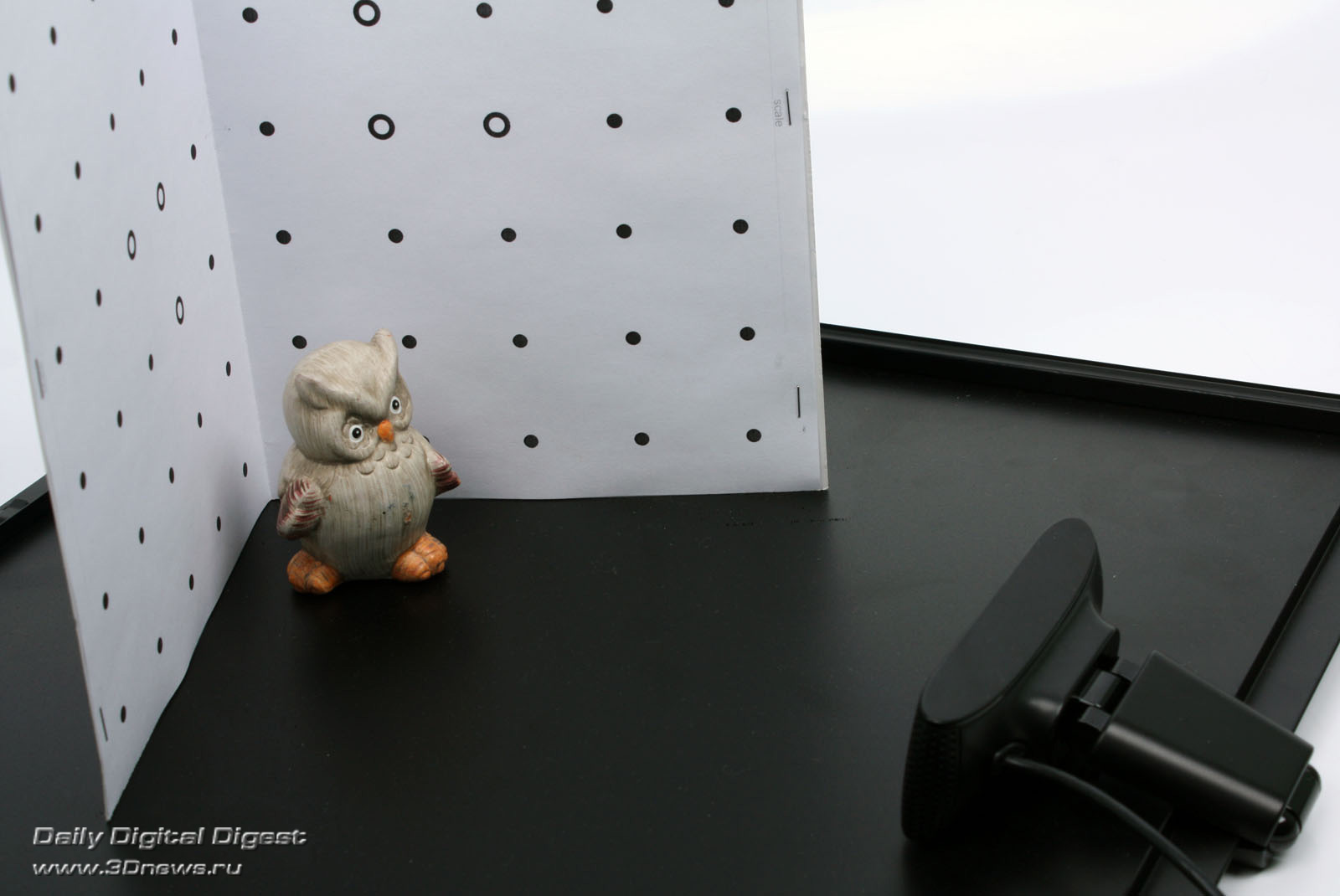
Я с гордостью представляю вам свой девайс:
Картонка для отбрасывания тени (должна быть плоской и отбрасывать тень в одной плоскости). Это будет имитировать работу лазера, который светит в плоскости, который вы тоже можете использовать, если он у вас есть (вы его можете заказать в интернете, он стоит около 20 у.е.). Естественно, лазер лучше лампы.
Теперь о принципе работы. Давайте посмотрим на эту картинку:
Мы видим, как падает тень. Линия тени должна быть чётко видна как на квадратных плоскостях, так и на сканируемом объекте. Угол ABC (как вы уже должны были догадаться) — прямой.
Давайте взглянем на то, что нам из этого нужно поближе:
Обратите внимание на линию пересечения с квадратными плоскостями и линию сканирования. Все точки на этих линиях лежат в одной плоскости. Если вы внимательно посмотрите на линию пересечения с плоскостями, то обнаружите, что они образуют три точки (A,B,C) пересечения с плоскостями. Значит, нам известны три точки из плоскости, в которой лежит линия сканирования (и линия пересечения).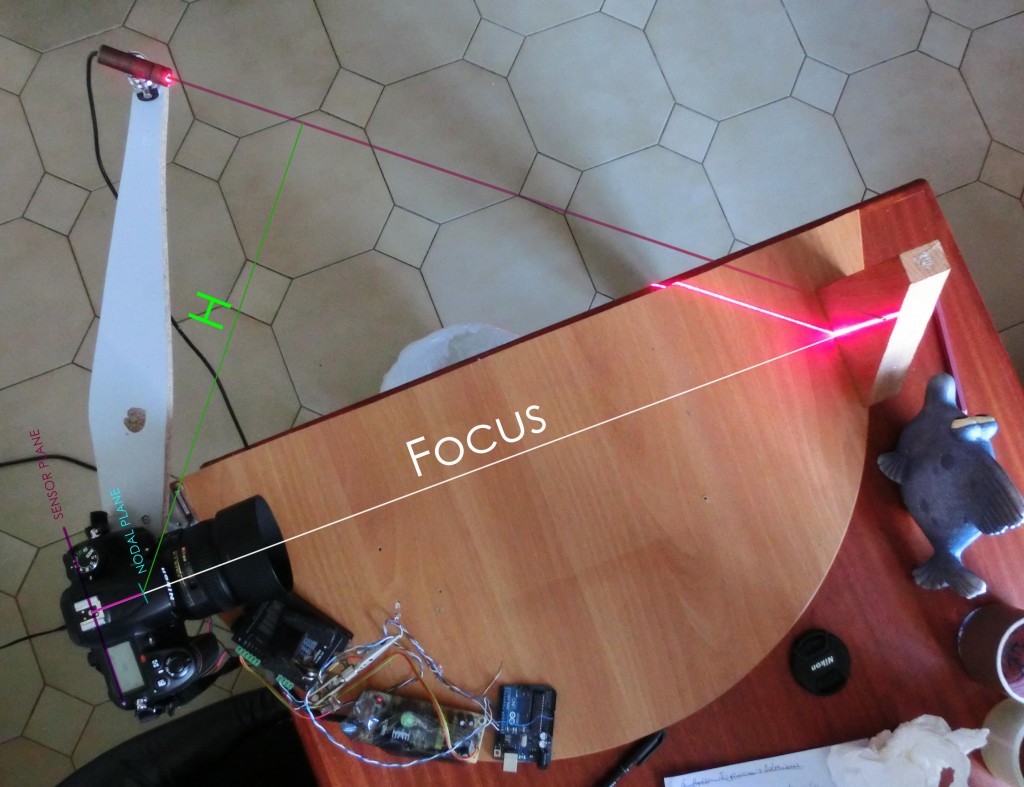
Зная координату камеры, можем испустить луч из камеры на линию сканирования. Пересечение с плоскостью тени и будут будущим 3d объектом.
Рассчитать координату камеры имея точки 0,1,2,3,4,5 очень трудно. Однако мы можем калибровать камеру вручную в 3д редакторе.
Я предпочитаю Maya и буду делать в ней и описывать всё на языке MEL.
Если вдуматься, то всё очень просто. Я даже полагаю, что человеческий мозг руководствуется теми же принципами, когда оценивает расстояние одним глазом. Если мы посчитаем картинку без тени, то предметы будут «висеть в воздухе», т.е. глазомер не может определить месторасположение объекта. Его координату можно вычислить только если объект движется … однако я загнался.
И так. Если вы не понимаете, что такое уравнение плоскости, то я постараюсь рассказать, как это понимаю я.
Несмотря на неоценимую мощь, плоскость описывается просто:
Ax + By + Cz + D = 0 (где A,B,C и D — постоянные, причём A,B и C одновременно не равны нулю)
Это общее уравнение плоскости. В прочем, в интернете вы можете много чего найти про плоскость.
В прочем, в интернете вы можете много чего найти про плоскость.
В справочниках очень сложно-звучащие определения. Лично я представляю себе плоскость в виде нормали и расстояния до плоскости от центра координат. Нормаль – это единичный вектор, а расстояние – это скаляр.
Представьте себе нормаль: она описывает плоскость, проходящую через центр координат, а потом подвиньте эту плоскость в направлении нормали на известное расстояние. Получается, что плоскость – это четыре скаляра или один вектор и скаляр.
На языке MEL плоскость можно описать так:
float $plane[4];
Это просто четыре числа. Получить их можно из трёх точек (три точки – это три вектора). Пример решения на MEL:
Выглядит громоздко, потому что я очень стараюсь комментировать подробно, но если вам что-то непонятно, то это простые действия над векторами. Обратитесь к любому справочнику (или даже к руководству Maya). Ничего сверхсложного здесь нет.
Как находить плоскость уже догадываемся. Теперь жизненно необходима позиция камеры. Чтобы рассчитать луч из камеры до линии сканирования.
Теперь жизненно необходима позиция камеры. Чтобы рассчитать луч из камеры до линии сканирования.
Калибровка камеры является очень сложной математической задачей. И я не решился мучить себя и (не дай бог) Вас этим занятием. Я подумал, что проще всего в ручную настроить камеру и снимать с неё координату.
Для этого создал сцену, в которой создал персональную камеру и каркас для подгона будущих точек, которые тоже будут назначаться вручную.
Калибровку камеры удобно совершать, когда картинка подгоняется к Resolution Gate.
Появилась позиция камеры. Теперь необходимо научиться рассчитывать пересечение луча с плоскостью. Для этого надо понимать, что такое луч. Луч – это два вектора. Один вектор — это координата старта луча (в нашем случае это камера), другой — это его направление. Направление, как и нормаль, — это единичный вектор (нормализованный вектор).
Направление, как и нормаль, — это единичный вектор (нормализованный вектор).
Можно долго на словах объяснять, как рассчитывать пересечение:
Как видите, решение весьма изящное:
Ну вот математика и кончилась.
Непосредственно сам процесс сканирования выглядит так:
Функция ( createScannerPoint ) создает точки (сферы) будущего объекта и помещает их в специальную группу (final_group), которую удобно проявлять и убирать из виду с помощью дополнительных кнопок на интерфейсе:
Если это можно назвать интерфейсом. А что тут собственно ещё такого придумаешь. Мне кажется, что код сложных интерфейсов крайне неудобно читать (даже если ты сам его написал), а это всё-таки ещё и урок.
Ресурсы:
1) Проект Maya 8.5 (ma)
2) Script
Запускаем проект майя и скрипт (source «3dScanner.mel»;).
Смотрим, как всё устроено: дёргаем локаторы. Теперь снимаем видео с web-камеры:
Подгоняем main_camera вместе с подключённым Image Plane (с включённым проигрыванием секвенции кадров из avi).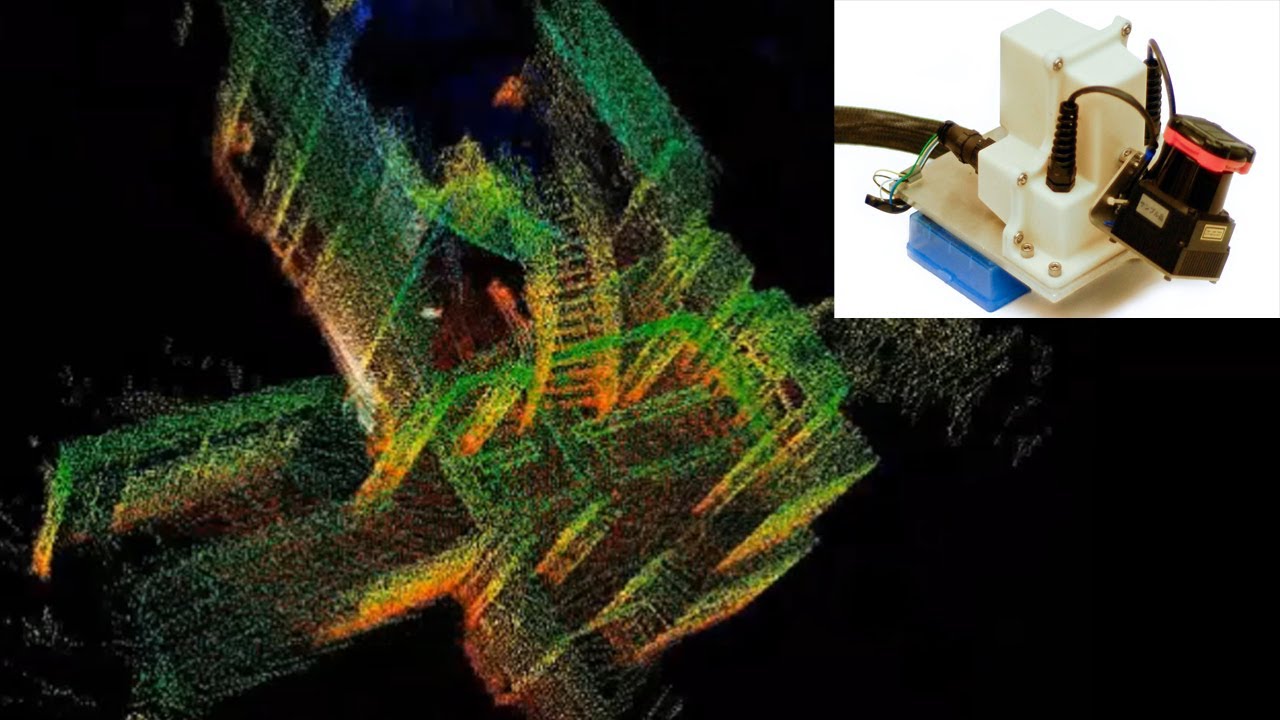 Как я уже говорил подгонять удобно по Resolution Gate:
Как я уже говорил подгонять удобно по Resolution Gate:
Чтобы повысить точность сначала воспользуйтесь alt и мышью, а потом Move Tool, Rotate Tool и чуть угол обзора подкрутить, если нужно. После подгона сделайте камере Lock ( в дополнительных инструментах окошка это делается одной кнопкой ).
У меня моя горе-цифромыльница умеет снимать максимум 640*480 и делает это ужасно. В принципе, можно использовать цифровой фотоаппарат или видеокамеру подключённые к компьютеру. Раз 640*480, то и в настройках Image Size должны быть эти числа.
Теперь, не нервничая, вручную двигаем прицел (target) по линии сканирования, не забывая перемещать локаторы, образующие плоскость тени (p1,p2,p3). Удобно также проставить на хот кей команду createScannerPoint или использовать кнопку G, после запуска команды из Script Editor.
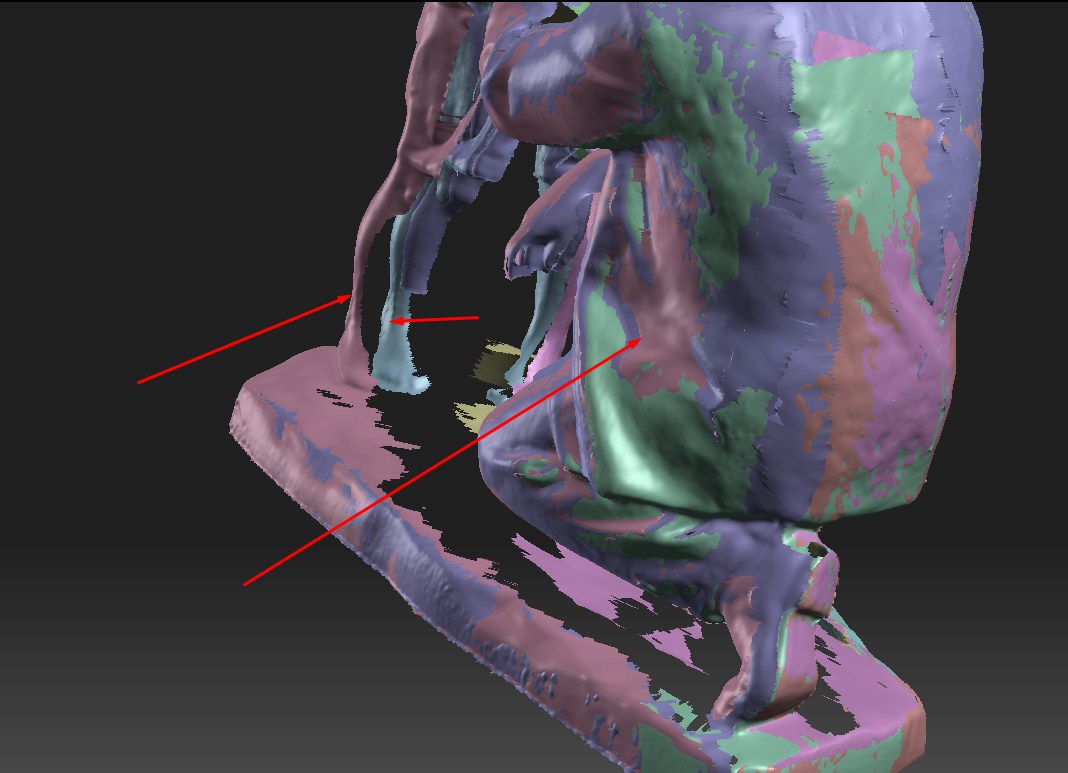
В итоге получаем набор из точек в трёх координатах. Чем точнее были ваши движения и техника, тем с меньшим шумом выглядит финальный результат.
На этом всё.
На самом деле меня очень сильно расстроило качество моей техники: мыленная и очень маленькая картинка, кадров в секунду катастрофически мало и монитор маловат у меня для точной работы. Самый облом – это лампа. Она даёт рассеянную тень в любом случае. Необходим специальный лазер (хоть он и стоит дёшево, но мой опыт общения с нашей почтой отбил желание его заказывать).
Вы можете из каждой сканированной линии делать NURBS кривую и по ним в итоге запустить loft поверхность. Или же написать скрипт, который строит сетку по полученным точкам, координаты которых вы можете снимать со сфер.
Урок построен так, что без понимания принципа работы отсканировать было бы трудновато. Не знаю, даже, хорошо это или плохо, но я подумал, что принцип тут интереснее реализации и на этом делал акцент урока (или статьи?). Короче говоря, сам не знаю, что я написал.
Надеюсь, что вам было интересно и спасибо за внимание.
694 0 850 38
27
2007-10-09
Я хотел бы добавить, что метод не имеет привязки к программе. Вы можете реализовать это в любом приложении 3д графики, имеющим встроенный интерпретатор.
Вы можете реализовать это в любом приложении 3д графики, имеющим встроенный интерпретатор.
2007-10-09
Может я конечно не много далек от тонкостей программирования сканеров, но мне чтот вообще не улыбнуло то что это все делается в самой майе, вопрос вытекает — а зачем вообще надо так издеваться над программой? если и так есть уже бесплатные программы с подобными возможностями и даже лучше, могу позавидовавть тока в одном — это в том что MEL знать это архи важно для майя, а так поставлю средний бал.
2007-10-10
Да интересно конечно же всё это, но на практике пользы мало…..
2007-10-10
Бесплатного софта для этого нет (они работают бесплатно, но не сохраняют ничего (без лицензии) и необходим лазер). И тот, что есть, имеет массу ограничений, хоть и стоит недорого.
Польза появляется, если использовать HD камеру и лазер. А их у меня нет. Точности моей web-камеры катастрофически не хватает. В связке с лампой особенно.
Но даже в таких условиях я могу отсканировать чайник. Для этого мне потребуется немного времени.
Если увеличить размер листов, достать очень яркую лампу (желательно лазер за 20 баксов), то можно отсканировать лицо человека. И в этом случае нету ограничения на материал (кожа просвечивается и может запутать алгоритмы поиска луча).
Вы сами можете судить о том, какого качества были мои исходники. И их доступности.
В платных (я про самые дешевые) девайсах (написано в инструкции) нужно ВВОДИТЬ координату камеры. Я считаю, что калибровка в Maya в тысячу раз удобнее, точнее и быстрее.
Хотел, чтобы было интересно. Всё же, я думаю, все понимают, что от настольной лампы ожидать большую пользу неразумно, но с ней весело играть :)
Описание построения поверхности по точкам заслуживает отдельной статьи. Я предложил лишь делать Loft по отсканированным кривым. Это должно сработать.
Для этого мне потребуется немного времени.
Если увеличить размер листов, достать очень яркую лампу (желательно лазер за 20 баксов), то можно отсканировать лицо человека. И в этом случае нету ограничения на материал (кожа просвечивается и может запутать алгоритмы поиска луча).
Вы сами можете судить о том, какого качества были мои исходники. И их доступности.
В платных (я про самые дешевые) девайсах (написано в инструкции) нужно ВВОДИТЬ координату камеры. Я считаю, что калибровка в Maya в тысячу раз удобнее, точнее и быстрее.
Хотел, чтобы было интересно. Всё же, я думаю, все понимают, что от настольной лампы ожидать большую пользу неразумно, но с ней весело играть :)
Описание построения поверхности по точкам заслуживает отдельной статьи. Я предложил лишь делать Loft по отсканированным кривым. Это должно сработать.
2007-10-10
Если вас это заинтересовало :)
То почитайте вот это
[url]http://www.vision.caltech.edu/bouguetj/index.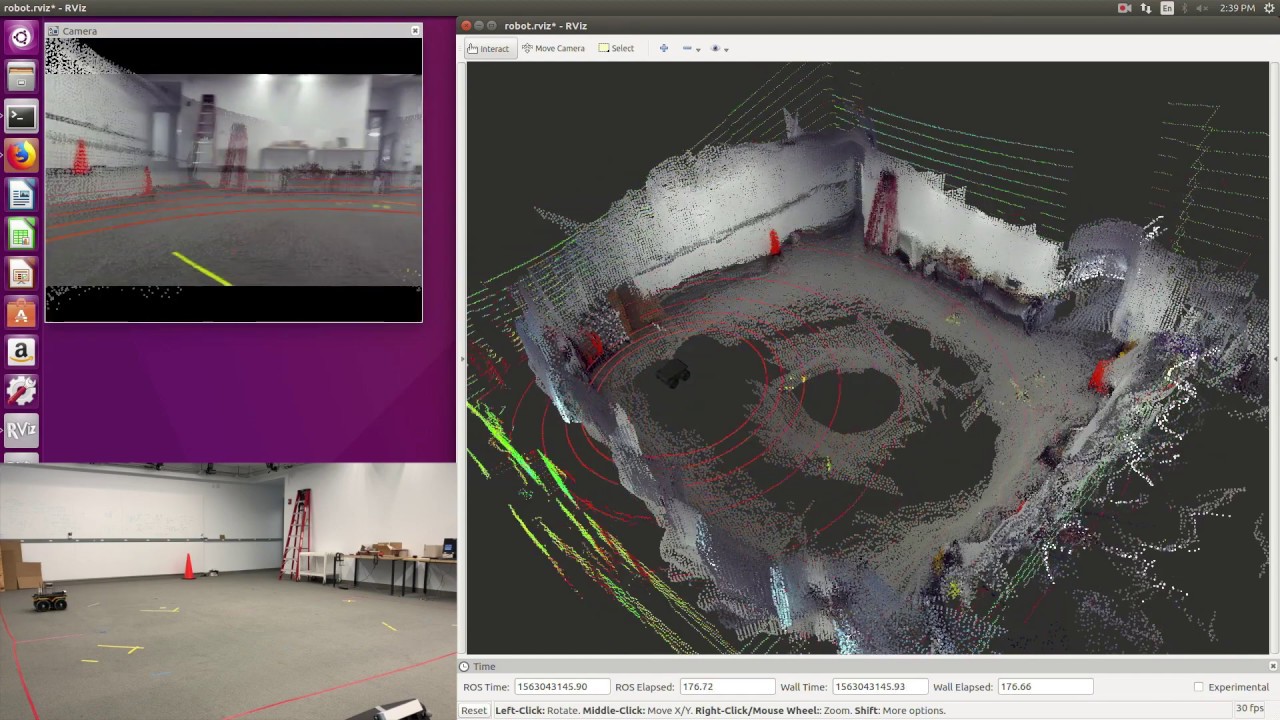 html[/url]
Решения на маленьких скриптах, очень гибки и изменяются под необходимые нужды за полчаса.
Обратите внимание на этот пример:
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car_anim.gif[/url]
Если найдёте такую же площадку с машиной, и проведёте замеры высоты стенки, то вы сможете смоделировать этот набросок в Maya (блендер, кси, 3дмакс…) и рассчитывать уравнение плоскости по тени, которую отбрасывает палка, которую он вручную перемещает. После того как калибровали в камеру.
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car6s.gif[/url]
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car4s.jpg[/url]
На мой взгляд, очень весело. Гибкость, которую предоставляют 3д редакторы сложно переоценить.
html[/url]
Решения на маленьких скриптах, очень гибки и изменяются под необходимые нужды за полчаса.
Обратите внимание на этот пример:
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car_anim.gif[/url]
Если найдёте такую же площадку с машиной, и проведёте замеры высоты стенки, то вы сможете смоделировать этот набросок в Maya (блендер, кси, 3дмакс…) и рассчитывать уравнение плоскости по тени, которую отбрасывает палка, которую он вручную перемещает. После того как калибровали в камеру.
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car6s.gif[/url]
[url]http://www.vision.caltech.edu/bouguetj/SunScan/images/car4s.jpg[/url]
На мой взгляд, очень весело. Гибкость, которую предоставляют 3д редакторы сложно переоценить.
2007-10-10
[quote]если и так есть уже бесплатные программы с подобными возможностями[/quote]
dimson3d, этот урок доказывает, что возможности Мауа практически безграничны.
Урок интересный и оригинальный. 5\5
Конечно на практике это мало где применимо, но всё же))
5\5
Конечно на практике это мало где применимо, но всё же))
2007-10-10
я всегда знал, что вы, товаристч, псих! В ИСКЛЮЧИТЕЛЬНО ХОРОШЕМ СМЫСЛЕ :)))))))) 5/5
2007-10-10
Ничего не понял. 5/5 🙂
2007-10-10
я , вроде, видел этот урок (похожий) где-то в другом месте не знаю кто был автар, но скрестим пальцы что вы, и что вы его не утащили:) а ваще качество получивших ся моделий не очень:)
2007-10-11
Не хорошо людей в плагиате обвинять. Ссылки на исходники я представил в начале статьи. Уверен, что видели вы не туториал, а платные программы.
2007-10-11
Это не совсем плагиат… Такого типа сканер был озвучен здесь же на render.ru. Но для него шла отдельныя программа и использвал он строительеый уровень (лазерный) Так что идея не его но молодец что перенёс в макс…. Хотя толку от этого мало.. Пограммы легко экспаритируют в *.3DS. Да и не акткально это… Чайник нарисовать 10 скунд, а если хочешь большего например голову получится с этого сканера такая лажа что смотреть страшно будет.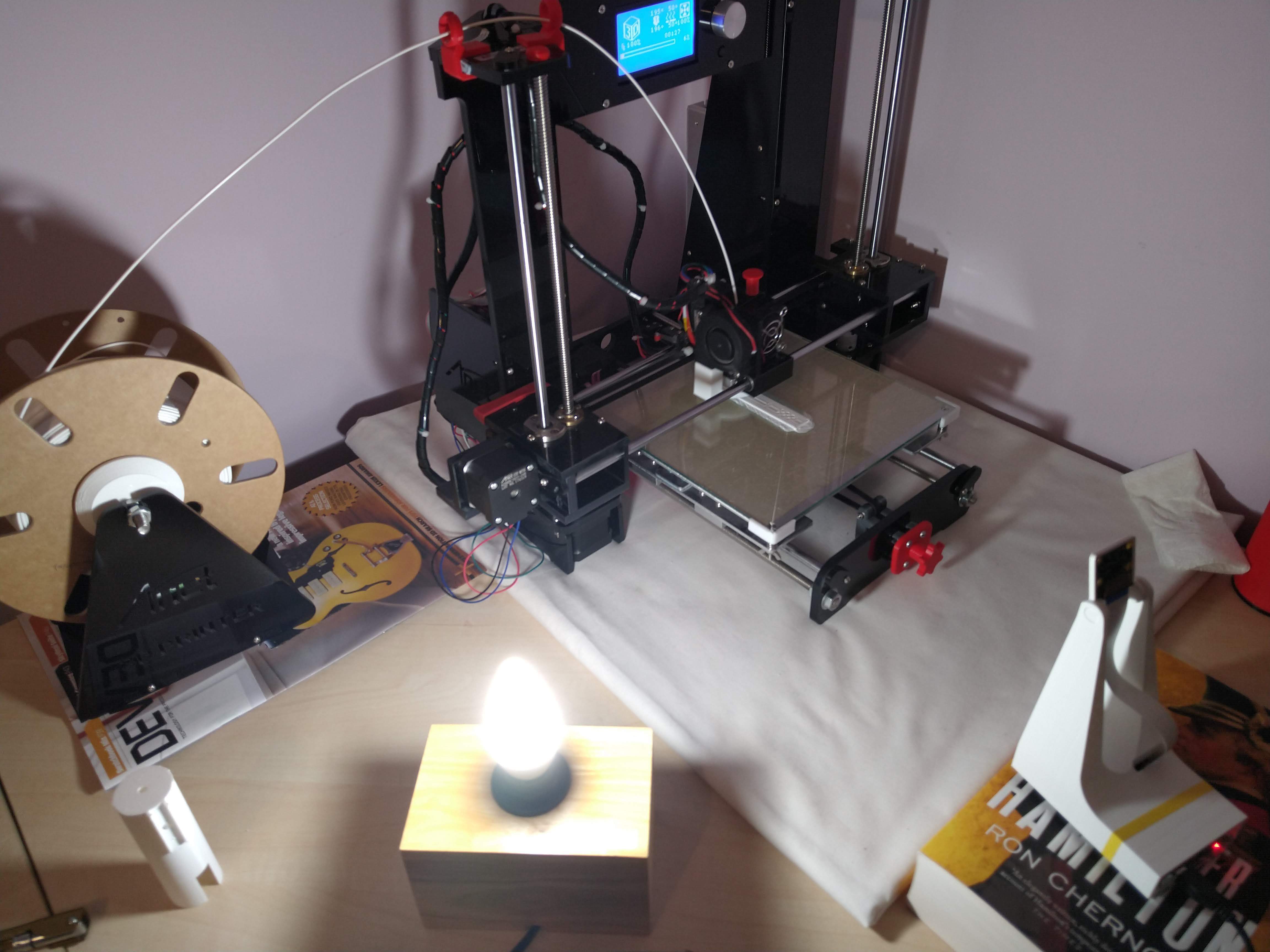 Я пока придерживаюсь дедовских методов, если надо чё та смаделить мы это пологончиками
Я пока придерживаюсь дедовских методов, если надо чё та смаделить мы это пологончиками
2007-10-11
Три недели писал эту статью. Несколько реализаций. Мне чертовки обидны обвинения. Не соревновался я с платными проектами: я писал статью про то как самому это реализовать и считаю, что справился с этой задачей.
2007-10-12
[quote]Три недели писал эту статью. Несколько реализаций. Мне чертовки обидны обвинения. Не соревновался я с платными проектами: я писал статью про то как самому это реализовать и считаю, что справился с этой задачей.[/quote]
Начало неплохое. Мне понравилось. И тема актуальная. Все-таки, если усовершенствовать систему, то может очень пригодиться в будущем.
Но данный урок я считаю незаконченным, т.к. присутствует только результат сканирования. А стоило бы продолжить до момента окончательного моделирования сканированного объекта. Поэтому с меня 5/4.
А то что урок писался три недели, то это еще немного. Я думаю те, кто делал похожие платные программы или скрипты, работали над этой темой не один месяц. А поэтому и качество у них лучше. И соревноваться с ними не надо. Если тебя такой принцип работы сканера устраивает, то не обязательно что это понравится другим.
Мой совет автору продолжать развивать тему и усовершенствовать технику сканирования. Ато надоело что все хорошее изобретается на Западе. Глядишь через пару лет скрипт превратиться в полноценный программный продукт. Чего я и желаю.
А поэтому и качество у них лучше. И соревноваться с ними не надо. Если тебя такой принцип работы сканера устраивает, то не обязательно что это понравится другим.
Мой совет автору продолжать развивать тему и усовершенствовать технику сканирования. Ато надоело что все хорошее изобретается на Западе. Глядишь через пару лет скрипт превратиться в полноценный программный продукт. Чего я и желаю.
2007-10-12
«Картонка для отбрасывания тени (должна быть плоской и отбрасывать тень в одной плоскости). Это будет имитировать работу лазера, который светит в плоскости, который вы тоже можете использовать, если он у вас есть (вы его можете заказать в интернете, он стоит около 20 у.е.). Естественно, лазер лучше лампы.»
Я в детсве от нечего делать просвечивал лазерной указкой через всё, что просвечиывалось и вот заметил интересную для данного случая особенность, что если перед лазерной укакой поместить пробирку из школьной хим. лаборатории, то лазерный лучь преламывается в плоскость, если вспомнить фильм «Чужой» в котором космический корабль сканировался.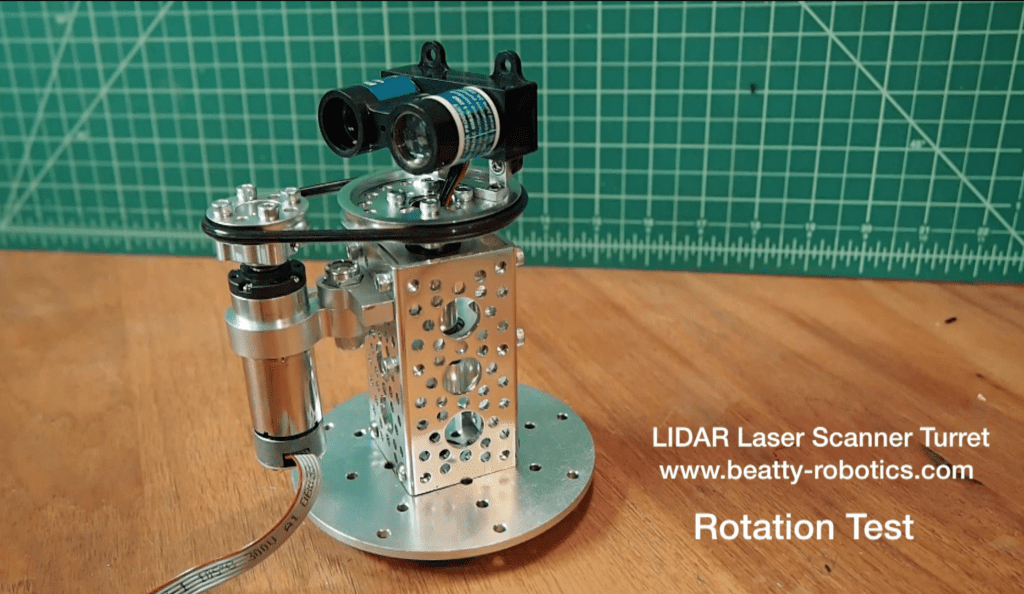 ..
В общем я хотел сказать, что выше указанный принцип можна довести до ума, вместо пробирки использывать какуе-то призму или пипетку и т.п. разместить на штатив и двигать с лёгкостью руки и не тратить 20$ на буржуйское устройство…
..
В общем я хотел сказать, что выше указанный принцип можна довести до ума, вместо пробирки использывать какуе-то призму или пипетку и т.п. разместить на штатив и двигать с лёгкостью руки и не тратить 20$ на буржуйское устройство…
2007-10-12
>Бесплатного софта для этого нет (они работают бесплатно, но не сохраняют ничего (без лицензии) твое заявление не соответствует действительности http://www.david-laserscanner.com/ прогарамма бесплатна, сохраняет в obj, дает весьма удовлетворительные результаты вместо предложенной автором статьи калибровки прогармма использует специальный шаблон, который значительно упрощает эту процедуру >И в этом случае нету ограничения на материал отсканируй стеклянный предмет
2007-10-12
кстати, упомянутая программа не только сохраняет в obj геометрию, но и захватывает текстуру, UV (все это в бесплатном модуле)
2007-10-12
>лазерный лучь преламывается в плоскость, если вспомнить фильм «Чужой» в котором космический корабль сканировался. ..
вот это очень инетресно!
а вообще, подойдет лазерный уровень — они дешевы и доступны
..
вот это очень инетресно!
а вообще, подойдет лазерный уровень — они дешевы и доступны
2007-10-12
Обваляю в муке и отсканирую %) ps У меня эта программа не запустилась. И я могу отсканировать автомобиль 🙂 Эта программа может отсканировать автомобиль при помощи забора? Прежде чем критиковать прочтите урок, пожалуйста, он ж е не про то совсем.
2007-10-12
Можно так же использовать солнечный свет и палку. В теории, если лазерную указку поместить на быстрый моторчик, то в кадре должна получаться линия %) (но не пробовал) Много чего можно придумать. Про это и хотел сказать.
2007-10-14
Как идея,интересна,правда, не ново.Понимаю что работы проделано не мало,но согласитесь,что «сыровато»… За старания 5/5
2007-10-15
Купил диск «Дежавю». В дополнениях было упоминание на 3d сканер LIDAR, который применяли для создания трехмерных помещений. Вот что пока накопал:
[url]http://www.fxguide.com/article114.html[/url]
Обратите на строку:
[quote]A Lidar scan was completed of a real church interior located in Los Angeles to serve as a guide for the look of the CG church. Pixel Magic’s 3D department modified the geometry of the Lidar scan in order to give the illusion of a 300ft height ceiling, and to add more detail where needed. Lighting of the virtual set was matched to a master clip of the real church interior.[/quote]
И еще:
[url]http://en.wikipedia.org/wiki/LIDAR[/url]
Pixel Magic’s 3D department modified the geometry of the Lidar scan in order to give the illusion of a 300ft height ceiling, and to add more detail where needed. Lighting of the virtual set was matched to a master clip of the real church interior.[/quote]
И еще:
[url]http://en.wikipedia.org/wiki/LIDAR[/url]
2007-10-16
>Обваляю в муке и отсканирую %) отмывать потом сам будешь? :) >И я могу отсканировать автомобиль 🙂 Эта программа может отсканировать автомобиль при помощи забора? в принципе, да по крайней мере человеческое тело в полный рост кто-то сканировал >Прежде чем критиковать прочтите урок, пожалуйста, он ж е не про то совсем кто ж критикует? просто ты сказал, что вот бесплатных программ нет, что они ничего не сохраняют — а я тебя поправил а так — довольно интересная статья
2007-10-16
У меня есть прикольная фигурка кошки. Подумал, что её было бы клёво отсканировать. Но она матово чёрная.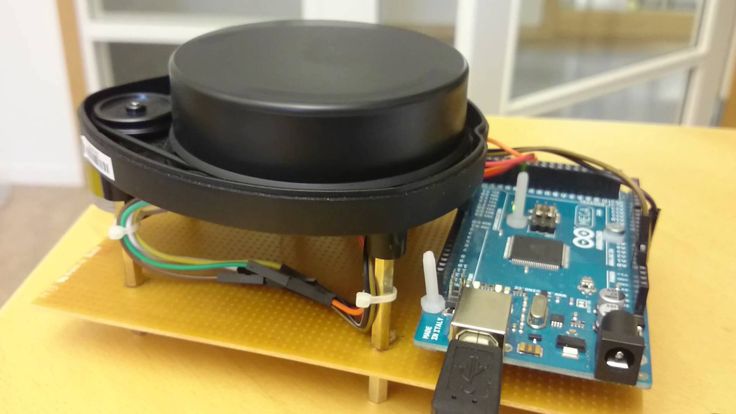 Чувствительности камеры не хватало, чтобы увидеть освещённую часть. Решил вывалять её в муке. Для этого растворил сахар чтобы она стала липкой и обвалял в муке. Фигня получилась %) нельзя это чудо было показывать тут. Хотя в принципе сработало бы.
Чувствительности камеры не хватало, чтобы увидеть освещённую часть. Решил вывалять её в муке. Для этого растворил сахар чтобы она стала липкой и обвалял в муке. Фигня получилась %) нельзя это чудо было показывать тут. Хотя в принципе сработало бы.
2007-10-17
Статья понравилась, сама идея сделать все в домашних условиях, планирую попробовать реализовать своими силами… благо на работе есть доступ к лазерным сканерам штрихкодов как одноплоскостным так и много плоскостным, да и камеры HiRes есть. Если что и получится и результат будет лучше то обязательно поделюсь опытом реализации.
2007-10-27
Народ а кто знает сколько стоит недорогой 3Д сканнер в Москве, например?
2007-12-24
Можно так же использовать солнечный свет и палку. В теории, если лазерную указку поместить на быстрый моторчик, то в кадре должна получаться линия %) (но не пробовал) Много чего можно придумать. Про это и хотел сказать. Ржу-нимагу….зачем на маторчик? Обыкновенную лазерную указку и стеклянную трубочку пойдёт даже от пипетки прикрепить их под 90градусов в форме буквы (Т) пропустить луч лазера через пипетку и будет вам ровная линия хоть комнату сканируйте!
2010-03-06
есть программы который по фотографиям очень качественно делают 3д модели и самое главное текстурят их. и никакого гемора.
и никакого гемора.
Lingkang Zhang » Самодельный 3D-лидар
Введение
Несмотря на то, что в наши дни лидары становятся дешевле, 3D-лидар все еще может стоить > 4000 долларов, например, VLP-16. Альтернативный подход заключается в создании 3D-лидара путем вращения 2D-лидара, такого как упомянутый в этой статье, с использованием 2D-лидара Hokuyo, который все еще довольно дорог и стоит несколько тысяч долларов.
В этой статье рассказывается о самодельном 3D-лидаре, изготовленном из очень дешевого 2D-лидара, серводвигателя и нескольких напечатанных на 3D-принтере деталей общей стоимостью около 100 долларов. Производительность проверяется путем выполнения 3D-картирования с использованием программного обеспечения LOAM.
Аппаратное обеспечение
Аппаратное обеспечение в целом довольно простое. Он включает в себя YDlidar X4, сервопривод с последовательной шиной Feetech STS3215, некоторые подшипники и напечатанные на 3D-принтере детали.
Преимущество использования этого сервопривода с последовательной шиной вместо обычного сервопривода с ШИМ для хобби заключается в том, что я могу легко контролировать скорость и получать обратную связь по углу, что упрощает реализацию программного обеспечения.
Я также сделал крепление, чтобы прикрепить его к мобильной платформе с двумя колесами с энкодерами и бортовым компьютером, чтобы я мог тестировать на нем программное обеспечение для 3D-картографии.
Программное обеспечение
Здесь в программном обеспечении используется ROS. Во-первых, мне нужно создать Tf-дерево, которое включает информацию об относительном положении данных лидарного сканирования по отношению к базе. Вот упрощенная древовидная диаграмма Tf системы.
После создания дерева Tf мне просто нужно опубликовать 2D лидарное сканирование в соответствующем кадре. Затем здесь используется пакет laser_geometry для преобразования данных 2D-лидарного сканирования в формат данных облака точек, чтобы данные можно было передавать в популярные программы для 3D-картографирования.
Видео
В этом видео показан рендеринг облака точек в Rviz. Обратите внимание, что на самом деле это не «отображение».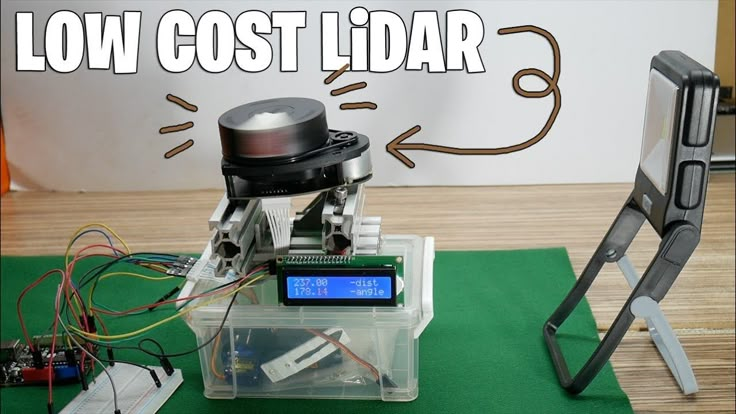 Я просто добавил задержки отображения всех данных лидарного сканирования, и они накапливались с течением времени. Одометрия колес также использовалась в демонстрации с мобильной платформой.
Я просто добавил задержки отображения всех данных лидарного сканирования, и они накапливались с течением времени. Одометрия колес также использовалась в демонстрации с мобильной платформой.
В этом видеоролике показано реальное трехмерное картографирование с помощью программного обеспечения LOAM, изначально созданного Ji Zhang et al. еще в 2014 году. Мне нужно было немного адаптировать программное обеспечение, чтобы оно работало должным образом. Исходное программное обеспечение использовало некоторые вычисления, чтобы определить, выполняется ли развертка (лидар вращается от одного конца к другому), в то время как мои данные слишком разрежены, чтобы сделать это, поэтому я модифицировал программное обеспечение, чтобы получать пустое сообщение, опубликованное из моей самодельной 3dlidar ROS. узел, чтобы определить, выполняется ли развертка.
узел, чтобы определить, выполняется ли развертка.
Заключение
В целом, проект достаточно успешен, и в нем реализовано базовое 3D-картографирование помещений. Система имеет два основных недостатка:
* во-первых, слишком низкая частота сканирования (около 10 Гц для 2D-сканирования), так как используется очень недорогой 2D-лидар
* во-вторых, отсутствует коррекция искажения данных 2D-лидара (в идеале это можно сделать с помощью IMU, установленного на лидаре), что мне нужно было очень медленно перемещать робота, чтобы правильно составить карту
6 Самодельные 3D-сканеры, которые можно собрать дома
Создать 3D-модель реального объекта можно очень быстро, если у вас дома есть 3D-сканер. Проблема в том, что покупать новые 3D-сканеры дорого.
Если вы ищете решение, почему бы не попробовать сделать дома недорогой 3D-сканер? Он может не создавать идеальные 3D-модели, но это экономически выгодная альтернатива покупке 3D-сканера.
Дешевле ли сделать самодельный 3D-сканер?
Стоимость покупки приличного 3D-сканера колеблется от 700 до 10 000 долларов в максимальном диапазоне. С другой стороны, сборка самодельного 3D-сканера может стоить менее 200 долларов, а некоторые даже всего 35 долларов.
В зависимости от разрешения вашего самодельного 3D-сканера вам все равно придется поработать над очисткой 3D-модели, чтобы ее можно было использовать для таких вещей, как 3D-печать, разработка игр или, возможно, прототипирование дизайна. Но в целом это все равно ускорит процесс проектирования по сравнению с созданием модели с нуля.
1. Дешевый 3D-сканер с 3D-печатью
Этот 3D-сканер построен с использованием 3D-печатных деталей, включая программное обеспечение с открытым исходным кодом и аппаратные файлы с открытым исходным кодом. Если вы решите установить максимум четыре лазера, то стоимость проекта составит от 35 до 50 долларов. После того, как он будет построен, обработка цифрового сканирования потребует некоторой работы, чтобы сгладить его.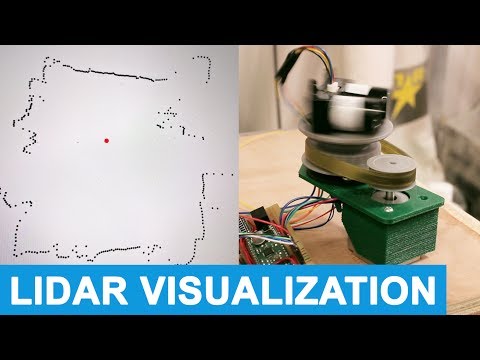 Но, учитывая его цену, попробовать стоит.
Но, учитывая его цену, попробовать стоит.
Файлы STL и полное руководство по сборке можно найти на Instructables. Помимо компонентов, напечатанных на 3D-принтере, вам понадобится от одного до четырех лазеров, шаговый двигатель, поворотный стол и Arduino Nano, чтобы собрать все это вместе. Одним из преимуществ этого проекта является то, что он много раз создавался создателями сообщества, в результате чего появилось множество изображений и отзывов, связанных с проектом, которые помогут заполнить любые пробелы.
2. Самодельный 3D-сканер с использованием цифровой зеркальной камеры
Другой вариант создания 3D-сканера — использование цифровой зеркальной камеры и метода, называемого фотограмметрией. По сути, это включает в себя получение множества изображений объекта под разными углами и объединение этих фотографий вместе в программе для создания 3D-модели.
Помимо цифровой зеркальной камеры вам понадобится Arduino, шаговый двигатель и драйвер, ЖК-экран и ИК-светодиод.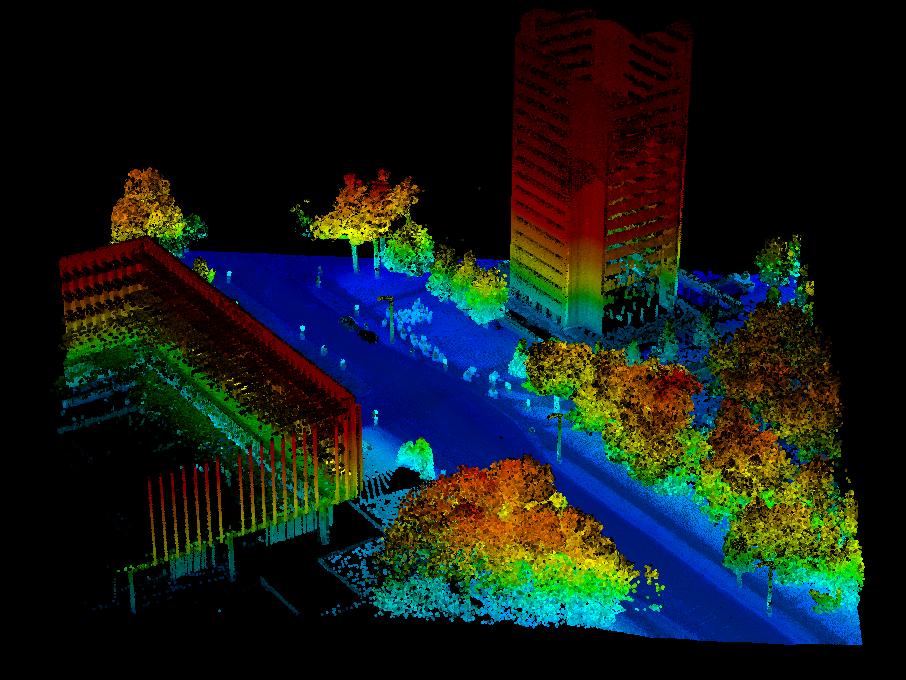 Целью аппаратного обеспечения является создание вращающейся платформы, которая перемещается на заданную величину, чтобы ваша камера могла сфотографировать объект очень детально и контролируемо. Вы можете найти отличное объяснение проекта на Instructables.
Целью аппаратного обеспечения является создание вращающейся платформы, которая перемещается на заданную величину, чтобы ваша камера могла сфотографировать объект очень детально и контролируемо. Вы можете найти отличное объяснение проекта на Instructables.
Настоящая сложность этого проекта заключается в обработке фотографий. Необходима хорошая программа фотограмметрии, и ее лицензия может стоить более 150 долларов. Доступно некоторое бесплатное программное обеспечение, но оно может иметь ограничения.
Если вам интересно, есть ли альтернативное решение, вы можете прочитать наше руководство о том, как превратить повседневные предметы в 3D-модели без 3D-сканера.
3. Оптический КТ/3D-сканер с Arduino
В этом проекте вы создадите 3D-сканер, который также может выполнять функции оптического КТ-сканера. Этот тип сканера подойдет, если у вас есть полупрозрачные объекты, такие как мармеладный мишка или долька апельсина. В противном случае вы можете использовать эту настройку с методом фотограмметрии для обычных 3D-сканирований.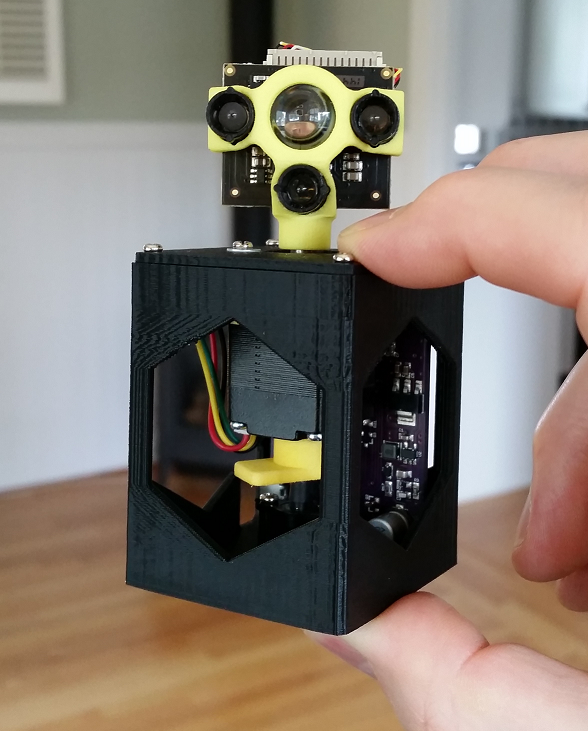
Все в этой сборке заключено в коробку. Это позволяет лучше контролировать освещение объекта для получения более четких изображений. Хотя это включает в себя некоторые работы по дереву и строительство, аппаратное обеспечение по-прежнему работает на скромном Arduino Nano, а также на дополнительных деталях, которые вы можете найти в любом хозяйственном магазине.
В Instructables доступно отличное руководство по сборке коробки, а также подробные сведения о создании элегантной панели управления для изменения параметров фотографии на ходу.
4. FabScan: 3D-сканер Raspberry Pi + Arduino
Этот 3D-сканер использует Raspberry Pi и Arduino для создания лазерного 3D-сканера. Что отличает эту сборку, так это то, что ею можно управлять удаленно через веб-браузер на телефоне.
Как и в других самодельных 3D-сканерах, шаговый двигатель и драйвер используются для вращения поворотного стола, удерживающего объект, который вы хотите отсканировать. Кроме того, вам понадобится линейный лазер и камера Raspberry Pi. Вы можете найти руководство и полный список компонентов на Instructables.
Вы можете найти руководство и полный список компонентов на Instructables.
В то время как создатели использовали коробку из МДФ, вырезанную лазером, вы можете так же легко использовать запасные части, лежащие в доме, для создания корпуса. В качестве альтернативы картон тоже может подойти, и покраска его в черный цвет поможет рассеять лазерный свет, чтобы он не мешал сканированию.
Как только вы хорошо отсканируете свой объект, вы можете заинтересоваться его 3D-печатью. У вас нет 3D-принтера? Вот наш выбор лучших 3D-принтеров.
5. Идеальный 3D-сканер размером с человека с Raspberry Pi
Хотя большинство самодельных 3D-сканеров предназначены для захвата небольших объектов, также можно построить 3D-сканер размером с человека. Способ сделать это с большим количеством Raspberry Pis, как вы можете видеть на Instructables.
Создатель этого проекта увеличил свой 3D-сканер, используя колоссальные 47 Raspberry Pi и камеру Raspberry Pi для каждого модуля. Цель состояла в том, чтобы с помощью метода фотограмметрии сфотографировать его объект со всех возможных ракурсов. Поскольку он хотел создать 3D-модель своего двухлетнего сына, все это должно было произойти мгновенно.
Поскольку он хотел создать 3D-модель своего двухлетнего сына, все это должно было произойти мгновенно.
Невероятно, но работает, и работает очень хорошо. Если у вас есть время и инвестиции, чтобы купить коробку, полную Raspberry Pis, вы не будете разочарованы, потому что результаты впечатляют. Производитель говорит, что вы можете использовать меньше изображений и камер и при этом получать хорошие результаты, особенно если вам нужно захватить только переднюю часть лица человека.
6. Автономный 3D-сканер
Возможно, вам нужен простой и компактный 3D-сканер, который можно изготовить за выходные. Если да, то этот проект вам подойдет. Этот 3D-сканер на Instructables разработан как «все в одном», что означает, что фотографии компилируются на борту, а файл STL сохраняется непосредственно на карту памяти. Вместо того, чтобы компилировать фотографии в отдельной программе фотограмметрии, этот 3D-сканер обрабатывает их за вас.
Хотя он не производит невероятно детализированных сканов, он позволяет быстро перенести 3D-модель прямо на 3D-печать.
