Как создать бесколлекторный двигатель с нуля. Какие преимущества у бесколлекторных моторов. Как правильно намотать обмотки и выбрать магниты. Как протестировать самодельный бесколлекторный двигатель. Какие характеристики можно получить у самодельного мотора.
Принцип работы бесколлекторного двигателя
Бесколлекторный двигатель (BLDC) — это разновидность электродвигателя, в котором коллекторно-щеточный узел заменен электронным коммутатором. Принцип его работы основан на взаимодействии магнитных полей постоянных магнитов и электромагнитов.
Основные компоненты бесколлекторного двигателя:
- Статор с обмотками
- Ротор с постоянными магнитами
- Датчики положения ротора
- Электронный контроллер
Электронный контроллер подает импульсы тока на обмотки статора в определенной последовательности, создавая вращающееся магнитное поле. Это поле взаимодействует с магнитным полем постоянных магнитов на роторе, заставляя его вращаться.

Преимущества бесколлекторных двигателей
Бесколлекторные двигатели имеют ряд существенных преимуществ по сравнению с коллекторными:
- Высокий КПД (до 90-95%)
- Большой крутящий момент
- Широкий диапазон регулировки скорости
- Высокая надежность и длительный срок службы
- Отсутствие искрения и радиопомех
- Низкий уровень шума и вибраций
Благодаря этим преимуществам бесколлекторные моторы широко применяются в радиоуправляемых моделях, электроинструменте, бытовой технике и промышленном оборудовании.
Конструкция самодельного бесколлекторного мотора
Для создания бесколлекторного двигателя своими руками потребуются следующие компоненты:
- Статор с обмотками
- Ротор с постоянными магнитами
- Вал ротора
- Подшипники
- Корпус двигателя
- Провода для обмоток
- Неодимовые магниты
- Электронный контроллер (ESC)
Ключевые моменты при конструировании:
- Статор должен иметь четное количество полюсов (обычно 12-14)
- Количество магнитов на роторе должно быть кратно числу полюсов статора
- Обмотки статора соединяются по схеме «звезда» или «треугольник»
- Магниты на роторе располагаются с чередованием полюсов
Намотка обмоток статора
Намотка обмоток — один из важнейших этапов создания бесколлекторного двигателя. От качества намотки зависят характеристики мотора.
Основные правила намотки:
- Используйте провод с эмалевой изоляцией подходящего сечения
- Наматывайте витки плотно и равномерно
- Количество витков должно быть одинаковым на всех полюсах
- Направление намотки чередуется от полюса к полюсу
- Концы обмоток надежно изолируйте
Выбор магнитов для ротора
Для ротора бесколлекторного двигателя обычно используются неодимовые магниты. Они обладают высокой остаточной индукцией и коэрцитивной силой.
При выборе магнитов нужно учитывать следующие параметры:
- Размер и форма магнитов (должны соответствовать размерам ротора)
- Количество магнитов (обычно 14-16 шт.)
- Марка сплава (N35, N42, N52 и т.д.)
- Максимальная рабочая температура
Важно правильно расположить магниты на роторе, чередуя северный и южный полюса. Для надежного крепления используйте специальный клей для магнитов.
Сборка и тестирование самодельного бесколлекторного мотора
После изготовления всех компонентов можно приступать к сборке двигателя:

- Установите подшипники на вал ротора
- Зафиксируйте магниты на роторе
- Установите статор в корпус двигателя
- Вставьте ротор в статор
- Подключите выводы обмоток
- Закрепите крышки корпуса
Для тестирования самодельного бесколлекторного мотора потребуется:
- Электронный регулятор скорости (ESC)
- Источник питания
- Пульт управления или сервотестер
- Тахометр для измерения оборотов
Начните тестирование на низких оборотах, постепенно увеличивая мощность. Проверьте нагрев двигателя, вибрации, шум. Измерьте максимальные обороты и потребляемый ток.
Характеристики самодельного бесколлекторного мотора
Характеристики самодельного бесколлекторного двигателя зависят от многих факторов: размеров, количества полюсов, намотки обмоток, используемых магнитов.
Типичные параметры самодельного мотора для радиоуправляемых моделей:
- Мощность: 500-1500 Вт
- Максимальные обороты: 20000-50000 об/мин
- КПД: 80-90%
- Рабочее напряжение: 7,4-14,8 В
- Максимальный ток: 30-100 А
Для точного определения характеристик двигателя рекомендуется провести стендовые испытания с измерением крутящего момента, мощности, КПД на различных режимах работы.
Применение самодельных бесколлекторных моторов
Самодельные бесколлекторные двигатели могут применяться в различных любительских проектах:
- Радиоуправляемые авиамодели
- Квадрокоптеры и дроны
- Радиоуправляемые автомодели
- Электровелосипеды
- Портативные электроинструменты
- Системы охлаждения компьютеров
При правильном проектировании и изготовлении самодельный бесколлекторный мотор может не уступать по характеристикам промышленным образцам. Это позволяет создавать уникальные конструкции с оптимальными параметрами для конкретной задачи.
Создание и тестирование бесколлекторного мотора / Habr
В этой статье мы хотели бы рассказать о том, как мы с нуля создали электрический мотор: от появления идеи и первого прототипа до полноценного мотора, прошедшего все испытания. Если данная статья покажется вам интересной, мы отдельно, более подробно, расскажем о наиболее заинтересовавших вас этапах нашей работы.
На картинке слева направо: ротор, статор, частичная сборка мотора, мотор в сборе
Вступление
Электрические моторы появились более 150 лет назад, однако за это время их конструкция не претерпела особых изменений: вращающийся ротор, медные обмотки статора, подшипники. С годами происходило лишь снижение веса электромоторов, увеличение КПД, а также точности управления скоростью. Сегодня, благодаря развитию современной электроники и появлению мощных магнитов на основе редкоземельных металлов, удаётся создавать как никогда мощные и в то же время компактные и легкие “Бесколлекторные” электромоторы. При этом, благодаря простоте своей конструкции они являются наиболее надежными среди когда-либо созданных электродвигателей. Про создание такого мотора и пойдет речь в данной статье.
Описание мотора
В “Бесколлекторных моторах” отсутствует знакомый всем по разборке электроинструмента элемент “Щетки”, роль которых заключается в передаче тока на обмотку вращающегося ротора. В бесколлекторных двигателях ток подается на обмотки не-двигающегося статора, который, создавая магнитное поле поочередно на отдельных своих полюсах, раскручивает ротор, на котором закреплены магниты.
Узнав мнение любителей радиоуправляемых моделей, в качестве задачи, мы выбрали мотор для гоночных машинок типоразмера “540”, как наиболее востребованного. Данный мотор имеет габариты 54мм в длину и 36мм в диаметре.
Ротор нового мотора мы сделали из единого неодимового магнита в форме цилиндра. Магнит эпоксидкой приклеили на вал выточенный из инструментальной стали на опытном производстве.

Статор мы вырезали лазером из набора пластин трансформаторной стали толщиной 0.5мм. Каждая пластина затем была тщательно покрыта лаком и затем из примерно 50 пластин склеивался готовый статор. Лаком пластины покрывались чтобы избежать замыкания между ними и исключить потери энергии на токах Фуко, которые могли бы возникнуть в статоре.

Корпус мотора был выполнен из двух алюминиевых частей в форме контейнера. Статор плотно входит в алюминиевый корпус и хорошо прилегает к стенкам. Такая конструкция обеспечивает хорошее охлаждение мотора.

Измерение характеристик
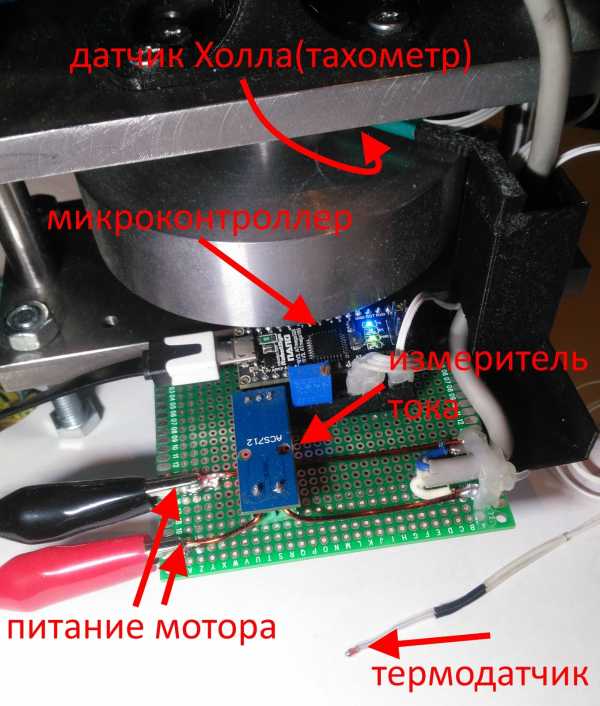
Для достижения максимальных характеристик своих разработок, необходимо проводить адекватную оценку и точное измерение характеристик. Для этого нами был спроектирован и собран специальный диностенд.

Основным элементом стенда является тяжёлый груз в виде шайбы. Во время измерений, мотор раскручивает данный груз и по угловой скорости и ускорению рассчитываются выходная мощность и момент мотора.
Для измерения скорости вращения груза используется пара магнитов на валу и магнитный цифровой датчик A3144 на основе эффекта холла. Конечно, можно было бы измерять обороты по импульсам непосредственно с обмоток мотора, поскольку данный мотор является синхронным. Однако вариант с датчиком является более надёжным и он будет работать даже на очень малых оборотах, на которых импульсы будут нечитаемы.
Кроме оборотов наш стенд способен измерять ещё несколько важных параметров:
- ток питания (до 30А) с помощью датчика тока на основе эффекта холла ACS712;
- напряжение питания. Измеряется непосредственно через АЦП микроконтроллера, через делитель напряжения;
- температуру внутри/снаружи мотора. Температура измеряется посредством полупроводникового термосопротивления;
Для сбора всех параметров с датчиков и передачи их на компьютер используется микроконтроллер серии AVR mega на плате Arduino nano. Общение микроконтроллера с компьютером осуществляется посредством COM порта. Для обработки показаний была написана специальная программа записывающая, усредняющая и демонстрирующая результаты измерений.
В результате наш стенд способен измерять в произвольный момент времени следующие характеристики мотора:
- потребляемый ток;
- потребляемое напряжение;
- потребляемая мощность;
- выходная мощность;
- обороты вала;
- момент на валу;
- КПД;
- мощность уходящая в тепло;
- температура внутри мотора.
Видео демонстрирующее работу стенда:
Результаты тестирования
Для проверки работоспособности стенда мы сначала испытали его на обычном коллекторном моторе R540-6022. Параметров для этого мотора известно достаточно мало, однако этого хватило, чтобы оценить результаты измерения, которые получились достаточно близкими к заводским.
Затем уже был испытан наш мотор. Естественно он смог показать лучшее КПД(65% против 45%) и при этом больший момент(1200 против 250 г на см), чем обычный мотор. Измерение температуры тоже дало достаточно хорошие результаты, во время тестирования мотор не нагревался выше 80 градусов.
Но на данный момент измерения пока не окончательны. Нам не удалось измерить мотор в полном диапазоне оборотов из-за ограничения мощности источника питания. Также предстоит сравнить наш мотор с аналогичными моторами конкурентов и испытать его “в бою”, поставив на гоночную радиоуправляемую машину и выступить на соревнованиях.
habr.com
«Бесколлекторные двигатели» ЛикБез и проектирование — Паркфлаер
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).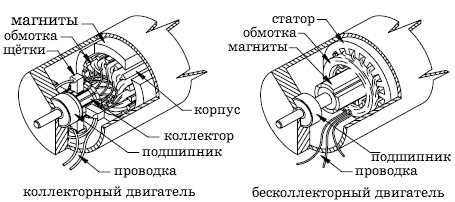
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
www.parkflyer.ru
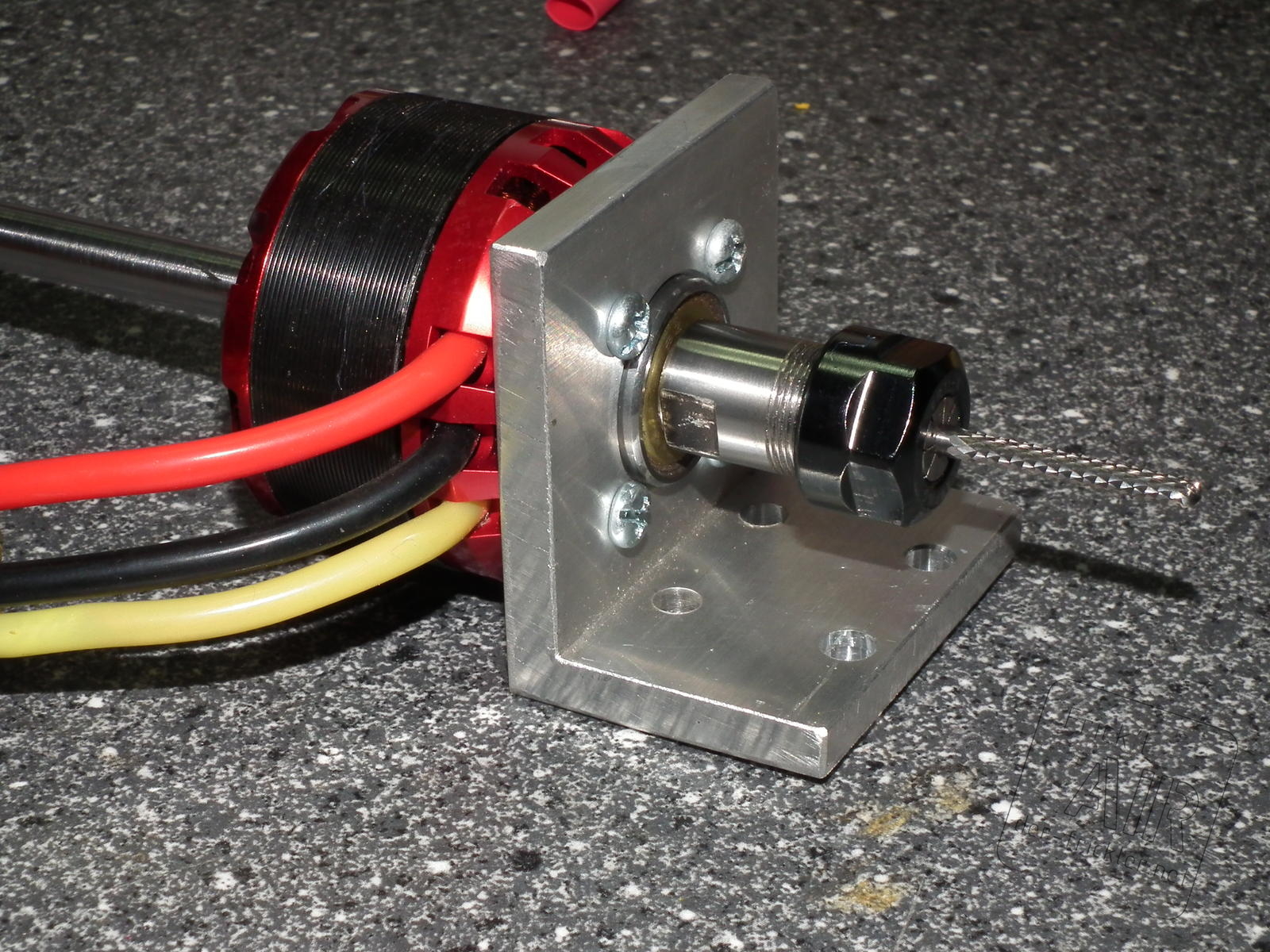
Бесколлекторный мотор GoolRC типоразмера 3660 для настольной сверлилки
Нестандартное использование бесколлекторного мотора, в любительских целях.Мотор 3660 мощный, позволяет устанавливать патроны на вал 5 мм.
Профильное назначение — двигатель для р/у машинок и прочей техники в масштабе 1:10, 1:8.
За подробностями под кат
Приветствую!
Сегодня будет немного рукоблудства на тему необычного использования модельных двигателей.
Содержание и быстрая навигация по тексту:
Введение и общая информация
Характеристики комплекта
Посылка, упаковка, комплект поставки
Внешний вид двигателя GoolRC 3660
Внешний вид ESC контроллера
Внешний вид сервомашинки
Использование и способ подключения
Заключение
Введение и общая информация
Наверх ▲
Бесколлекторный (или вентильный) двигатель — это разновидность электродвигателя переменного тока, у которого коллекторно-щеточный узел заменен бесконтактным полупроводниковым коммутатором, управляемым датчиком положения ротора. Иногда можно встретить такую аббревиатуру: BLDС — это brushless DC motor. Для простоты буду называть его двигатель-бесколлекторник или просто БК.
Бесколлекторные двигатели достаточно популярны из-за своей специфики: отсутствуют расходные материалы типа щеток, отсутствует угольная/металлическая пыль внутри от трения, отсутствуют искры (а это огромное направление взрыво и огне безопасных приводов/насосов). Используются начиная от вентиляторов и насосов заканчивая высокоточными приводами.
Основное применение в моделизме и любительских конструкциях: двигатели для радиоуправляемых моделей.
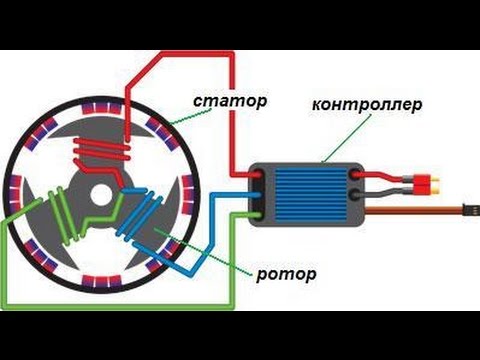
Общий смысл этих двигателей — три фазы и три обмотки (или несколько обмоток соединенных в три группы) управление которыми осуществляется сигналом в виде синусоиды или приближенной синусоиды по каждой из фаз, но с некоторым сдвигом. На рисунке простейшая иллюстрация работы трехфазного двигателя.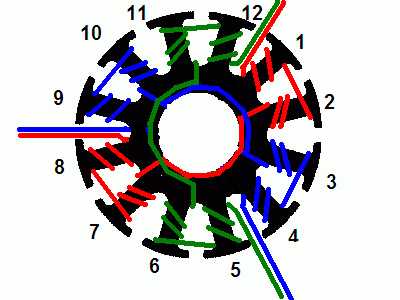
Соответственно, одним из специфичных моментов управления БК двигателями является применение специального контроллера-драйвера, который позволяет регулировать импульсы тока и напряжения по каждой фазе на обмотках двигателя, что в итоге дает стабильную работу в широком диапазоне напряжений. Это так называемые ESC контроллеры.
БК моторы для р/у техники бывают различных типоразмеров и исполнения. Одни из самых мощных это серии 22 мм, 36 мм и 40/42 мм. По конструкции они бывают с внешним ротором и внутренним (Outrunner, Inrunner). Моторы с внешним ротором по факту не имеют статичного корпуса (рубашки) и являются облегченными. Как правило, используют в авиамоделях, в квадракоптерах и т.п.
Двигатели с внешним статором проще сделать герметичными. Подобные применяют для р/у моделей, которые подвергаются внешним воздействиям тип грязи, пыли, влаги: багги, монстры, краулеры, водные р/у модели).
Например, двигатель типа 3660 можно запросто установить в р/у модель автомобиля типа багги или монстра и получить массу удовольствия.
Также отмечу различную компоновку самого статора: двигатели 3660 имеют 12 катушек, соединенных в три группы.
Это позволяет получить высокий момент на валу. Выглядит это примерно так.
Соединены катушки примерно вот так
Если разобрать двигатель и извлечь ротор, то можно увидеть катушки статора.
Вот что внутри 3660 серии
еще фото
Любительское применение подобным двигателей с высоким моментом — в самодельных конструкциях, где требуется малогабаритный мощный оборотистый двигатель. Это могут быть вентиляторы турбинного типа, шпиндели любительских станков и т.п.
Так вот, с целью установки в любительский станок для сверления и гравировки был взят набор бесколлекторного двигателя вместе с ESC контроллером
GoolRC 3660 3800KV Brushless Motor with ESC 60A Metal Gear Servo 9.0kg Set
Плюсом в наборе был сервопривод на 9 кг, что очень удобно для самоделок.
Общие требования при выборе мотора были следующие:
— Количество оборотов/вольт не менее 2000, так как планировалось использование с низковольтными источниками (7.4…12В).
— Диаметр вала 5мм. Рассматривал варианты с валом 3.175 мм (это серия 24 диаметра БК двигателей, например, 2435), но тогда бы пришлось докупать новый патрон ER11. Есть варианты еще мощнее, например, двигатели 4275 или 4076, с валом 5 мм, но они соответственно дороже.
Характеристики комплекта
Наверх ▲
Характеристики бесколлекторного мотора GoolRC 3660:
Модель: GoolRC 3660
Мощность: 1200W
Рабочее напряжение: до 13V
Предельный ток: 92A
Обороты на вольт (RPM/Volt): 3800KV
Максимальные обороты: до 50000
Диаметр корпуса: 36mm
Длина корпуса: 60mm
Длина вала: 17mm
Диаметр вала: 5mm
Размер установочных винтов: 6 шт * M3 (короткие, я использовал М3*6)
Коннекторы: 4mm позолоченные «бананы» male
Защита: от пыли и влаги
Характеристики ESC контроллера:
Модель: GoolRC ESC 60A
Продолжительный ток: 60A
Пиковый ток: 320A
Применяемый аккумуляторные батареи: 2-3S Li-Po / 4-9S Ni-Mh Ni-Cd
BEC: 5.8V / 3A
Коннекторы (Вход): T plug male
Коннекторы (вызод.): 4mm позолоченные «бананы» female
Размеры: 50 х 35 х 34mm (без учета длины кабелей)
Защита: от пыли и влаги
Характеристики сервомашинки:
Рабочее напряжение: 6.0V-7.2V
Скорость поворота (6.0V): 0.16sec/60° без нагрузки
Скорость поворота (7.2V): 0.14sec/60° без нагрузки
Момент удержания (6.0V): 9.0kg.cm
Момент удержания (7.2V): 10.0kg.cm
Размеры: 55 х 20 х 38mm (Д * Ш * В)
Параметры комплекта:
Размер упаковки: 10.5 х 8 х 6 см
Масса упаковки: 390 гр
Фирменная упаковка с логотипом GoolRC
Состав комплекта:
1 * GoolRC 3660 3800KV Motor
1 * GoolRC 60A ESC
1 * GoolRC 9KG Servo
1 * Информационный листок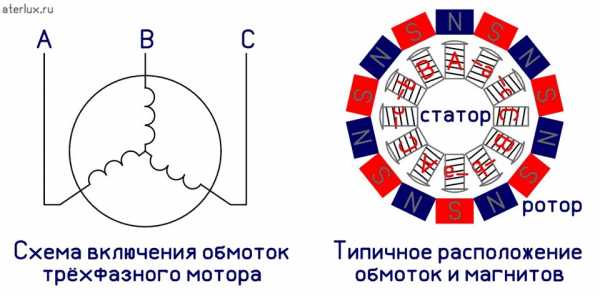
Размеры для справки и внешний вид двигателя GoolRC 3660 с указанием основных моментов
Посылка, упаковка, комплект поставки
Наверх ▲
Теперь несколько слов о самой посылке.
Посылка пришла в виде небольшого почтового пакета с коробкой внутри
Доставлялась альтернативной почтовой службой, не почтой России, о чем и гласит транспортная накладная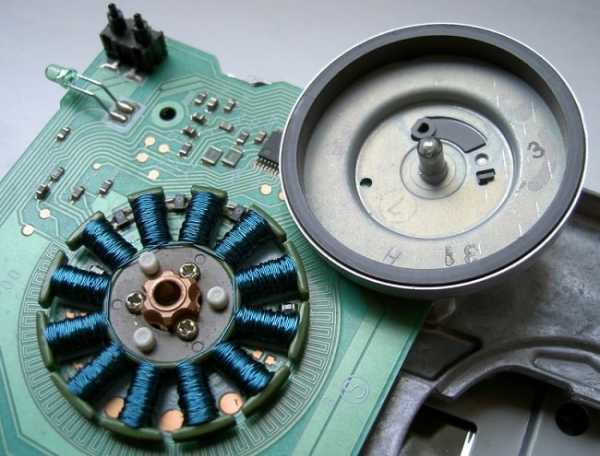
В посылке фирменная коробочка GoolRC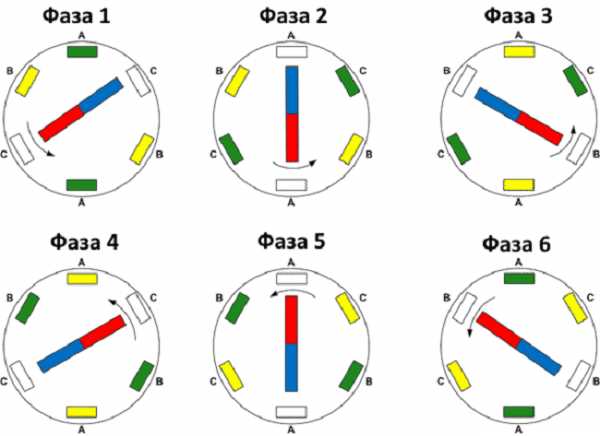
Внутри комплект бесколлекторного двигателя типоразмера 3660 (36х60 мм), ESC-контроллера для него и сервомашинки с комплектом
Теперь рассмотрим весь комплект по отдельным составляющим. Начнем с самого главного — с двигателя.
Внешний вид двигателя GoolRC 3660
Наверх ▲
БК двигатель GoolRC представляет собой цилиндр из алюминия, размеры 36 на 60 мм. С одной стороны выходят три толстых провода в силиконовой оплетке с «бананами», с другой стороны вал 5 мм. Ротор с двух сторон установлен на подшипниках качения. На корпусе присутствует маркировка модели
Еще фотография. Внешняя рубашка неподвижная, т.е. тип мотора Inrunner.
Маркировка на корпусе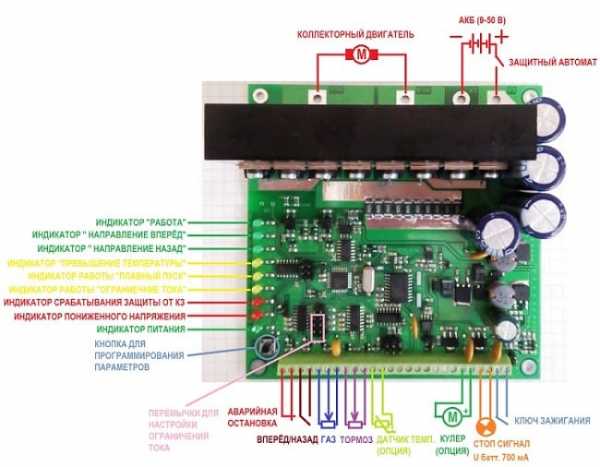
С заднего торца видно подшипник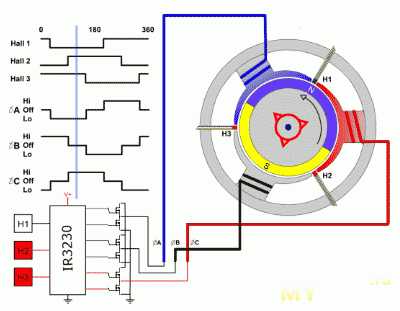
Заявлена защита от брызг и влаги
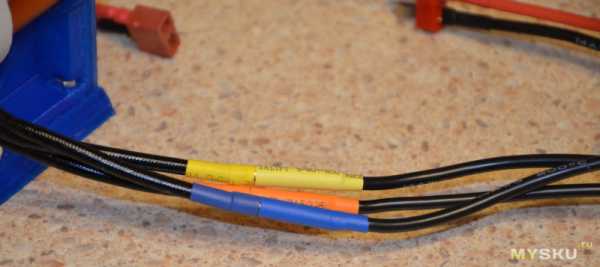
Выходят три толстых, коротких провода для подключения фаз: u v w. Если будете искать клеммы для подключения — это бананы 4 мм
Провода имеют термоусадку разного цвета: желтый, оранжевый и синий
Размеры мотора: диаметр и длина вала совпадают с заявленными: Вал 5х17 мм

Габариты корпуса двигателя 36х60 мм

Сравнение с коллекторным 775 двигателем
Сравнение с б/к шпинделем на 300Вт (и ценой около $100). Напоминаю, что у GoolRC 3660 заявлена пиковая мощность 1200Вт. Даже если использовать треть мощности, все равно это дешевле и больше, чем у этого шпинделя
Сравнение с другими модельными двигателями
Для корректной работы двигателя потребуется специальный ESC контроллер (который есть в комплекте)
Внешний вид ESC контроллера
Наверх ▲
ESC контроллер — это плата драйвера двигателя с преобразователем сигнала и мощными ключами. На простых моделях вместо корпуса используется термоусадка, на мощных — корпус с радиатором и активным охлаждением. 
На фото контроллер GoolRC ESC 60A по сравнению с «младшим» братом ESC 20A
Обратите внимание: присутствует тумблер выключения-выключения на отрезке провода, который можно встроить в корпус устройства/игрушки
Присутствует полный комплект разъемов: входные Т-коннекторы, 4 мм бананы-гнезда, 3-пиновый вход управляющего сигнала
Силовые бананы 4 мм — гнезда, маркируются аналогично по цветам: желтый, оранжевый и синий. При подключении перепутать можно только умышленно
Входные Т-коннекторы. Аналогично перепутать полярность можно если вы очень сильный)))))
На корпусе присутствует маркировка с названием и характеристиками, что очень удобно
Охлаждение активное, работает и регулируется автоматически.
Для оценки размеров приложил PCB ruller
Внешний вид сервомашинки
Наверх ▲
В наборе также присутствует сервомашинка GoolRC на 9 кг.
Плюс как и для любой другой сервомашинки в комплекте идет набор рычагов (двойной, крест, звезда, колесо) и крепежная фурнитура (понравилось, что есть проставки из латуни)
Макрофото вала сервомашинки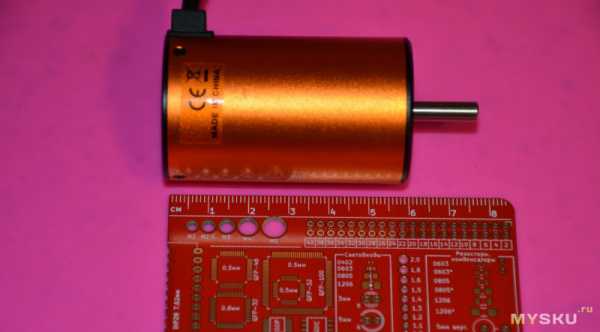
Пробуем закрепить крестообразный рычаг для фотографии
На самом деле интересно проверить заявленные зарактеристики — это металлический комплект шестерен внутри. Разбираем сервомашинку. Корпус сидит на герметике по кругу, а внутри присутствует обильная смазка. Шестерни и правда металлические. 
Фото платы управления сервой
Использование и способ подключения
Наверх ▲
Для чего все это затевалось: для того, чтобы попробовать БК двигатель как сверлилку/гравировалку. Все таки заявлена пиковая мощность 1200Вт.
Я выбрал проект сверлильного станка для подготовки печатных плат на thingiverse. Там есть множество проектов для изготовления светильного настольного станка. Как правило, все эти проекты малогабаритные и предназначены для установки небольшого двигателя постоянного тока. 
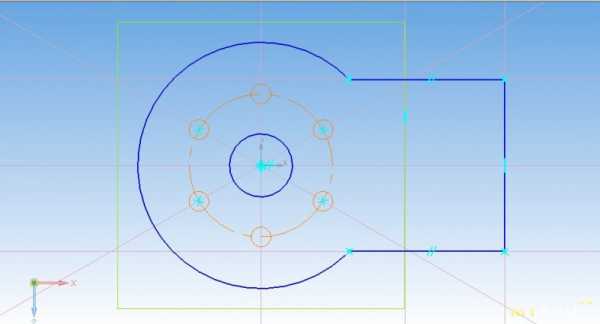
Я выбрал один из популярных проектов и доработал крепление в части держателей двигателя 3660 (родной двигатель был меньше и имел другие размеры креплений)
Привожу чертеж посадочных мест и габаритов двигателя 3660
В оригинале стоит более слабый двигатель. Вот эскиз крепления (6 отверстий для М3х6)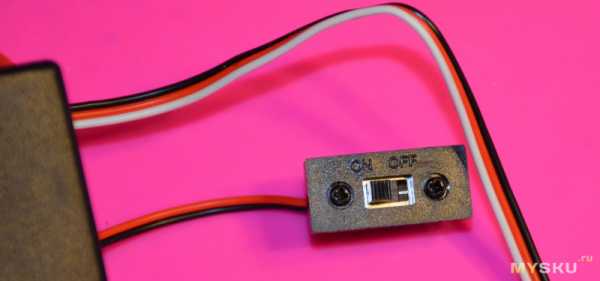
Скрин из программы для печати на принтере
Заодно напечатал и хомут для крепления сверху
Мотор 3660 с установленным цанговым патроном типа ER11 

Для подключения и проверки БК мотора потребуется собрать следующую схему: источник питания, сервотестер или плата управления, ESC-контроллер двигателя, двигатель.
Я использую самый простой сервотестер, он также дает нужный сигнал. Его можно использовать для включения и для регулировки оборотов двигателя
При желании можно подключить микроконтроллер (Ардуино и т.п.). Привожу схему из интернета с подключением аутраннера и 30А контроллера. Скетчи найти не проблема.
Соединяем все, по цветам.
Источник показывает, что холостой ток контроллера небольшой (0.26А)
Теперь сверлильный станок.
Собираем все и крепим на стойку

Для проверки собираю без корпуса, потом допечатаю корпус, куда можно установить штатный выключатель, крутилку сервотестера
Еще одно применение подобного 3660 БК двигателя — в качестве шпинделя станков для сверления и фрезеровки печатных плат

Про сам станок обзор доделаю чуть позже. Будет интересно проверить гравировку печатных плат с помощью GoolRC 3660
Заключение
Наверх ▲
Двигатель качественный, мощный, крутящий момент с запасом подойдет под любительские цели.
Конкретно живучесть подшипников при боковом усилии при фрезеровки/гравировки покажет время.
Определенно существует выгода применения модельных двигателей в любительских целях, а также простота работы и сборки конструкций на них по сравнению с шпинделями для ЧПУ, которые дороже и требуют специального оборудования (источники питания с регулировкой оборотов, драйверы, охлаждение и т.п.).
При заказе пользовался купоном SALE15 со скидкой 5% на все товары магазина.
Спасибо за внимание!
mysku.ru
Бесколлекторник своими руками — Паркфлаер
Здравствуйте. Всем доброго времени суток и всех с Новым годом! Хочу вам представить работу «Бесколлекторный двигатель», которая была подготовлена для участия в конкурсе мной и моими учениками станции юных техников.Изготовление бесколлекторного электродвигателя является актуальным, так как данные двигатели для авиа- и других моделей производят только в зарубежных странах, стоимость таких двигателей очень высока.
Этот двигатель был эксперементальным, на модель его так и не поставили, он так и остается выставочным экспонатом. Но были изготовлены другие двигатели, которые мы сейчас используем на моделях.
Использование заготовки, отлитой в муфельной печи, неодимовых магнитов, взятых с DVD-проигрывателей, CD-приводов, автомагнитол, вала вместе с подшипниками, взятых от старого видеомагнитофона,провода ПЭВ-2 1,05 позволили нам создать легкий, мощный и высокооборотистый бесколлекторный электродвигатель, который имеет следующие технические характеристики:
— масса двигателя: 190 грамм
— высота двигателя без вала: 40
— диаметр: 52 мм
— диаметр вала двигателя:6 мм
— количество используемых элементов питания при тестировании:3S-6S Li-Po
Цель разработки: изготовление двигателя с высоким КПД стоимостью изготовления ниже, чем приобретенный в магазине. Учитывая, что один двигатель — это лучше чем испорченный видеомагнитофон и десяток убитых CD- DVD-приводов, DVD- проигрывателей, так как весь этот хлам на станцию юных техников везут кучами, да и детишкам есть что покрутить.
Главное преимущество — отсутствие вращающихся контактов и переключающихся контактов вообще — а это главный источник потерь в электродвигателях на постоянных магнитах.
Как уже говорилось ранее, для изготовления данного двигателя нам потребовалась заготовка, которую мы отлили в муфельной печи. Получилась заготовка 60 мм в диаметре и 100мм высотой. На токарно-винторезном станке ТВ-4 обработали и выточили корпус двигателя. Так как чертежей не было, оттолкнулись от статора, который у нас имелся и от подшипников,плюс неодимовые магниты, зазор между магнитами и статором должны быть минимальными на сколько это возможно. Это скажется на мощности двигателя. Размеры магнитов должны выбираться исходя из размеров ротора и статора, толщина исходя из толщины уже существуещего магнита на роторе моторчика. Магниты должны быть установлены с чередованием полюсов S-N-S-N-S… Мы взяли 14 магнитов и разложили их в одну полоску на столе. Взяли 2 маркера разного цвета и все четные пометили одним цветом, нечетные — другим. Затем аккуратно по одной штучке, не переворачивая, именно так как они лежали приклеили их внутрь ротора.
Проверка качества намотки производится мультиметром. Провод не должен быть сломан или с поврежденной изоляцией. Сопротивление обмоток должно быть примерно одинаковым. Провода обмотки не должны быть закорочены между собой или на статор (в случае повреждения изоляции).
P.S. Если покупать все комплектующие — это может и невыгодно, но в нашем случае материал для сборки просто лежал без дела. Это списанные из других школ компьютеры, пылящиеся в подвале, сгоревшие DVD-проигрыватели, морально устаревшие автомагнитолы. И это все все в дело!!!!!!
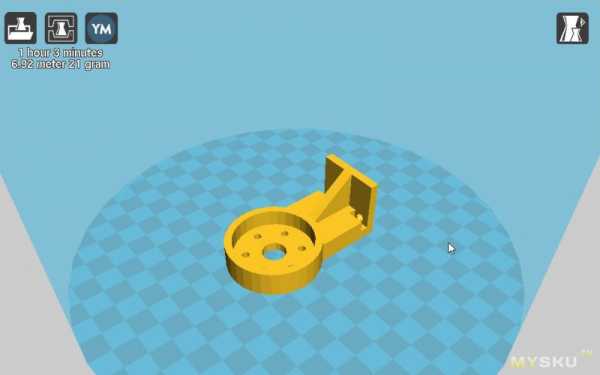
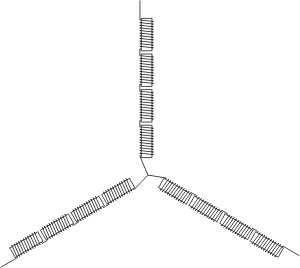
Схема намотки
И вот двигатель ожил. (Первое испытание).

Работа на выставке


www.parkflyer.ru
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД – это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
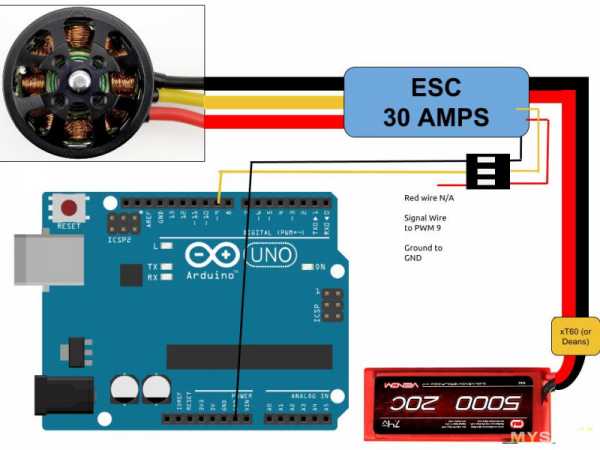 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководе Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
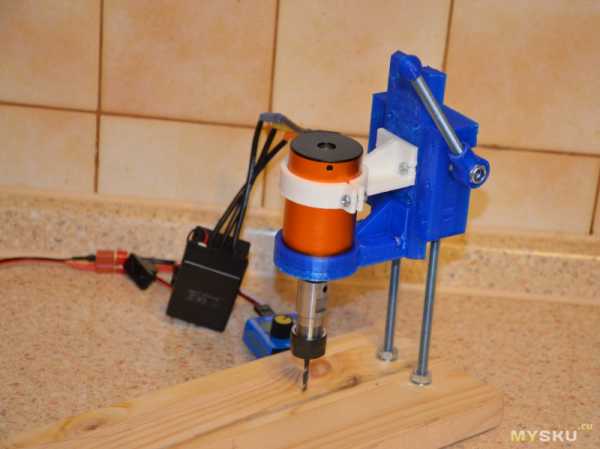 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» – отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» – положительный, «А» – отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
www.asutpp.ru
Перемотка бесколлекторного двигателя от авиамодели

Данная статья подробно описывает процесс перемотки электрического бесколлекторного мотора в домашних условиях. На первый взгляд этот процесс может показаться трудоемким и долгим, но если разобраться, то одна перемотка двигателя займет не больше часа.
Под перемотку попал двигатель FC 28-22 бесколлекторный Outrunner 1200kv
Материалы:
— Проволока (0,3 мм)
— Лак
— Термоусадка (2 мм и 5 мм)
Инструменты:
— Ножницы
— Кусачки
— Паяльник
— Припой и кислота
— Наждачка (надфиль)
— Зажигалка
Шаг 1. Подготовка двигателя и проволоки.
Снимаем с вала двигателя стопорную шайбу и вынимаем статор.

Сматываем старую обмотку со статора. Рекомендую посчитать количество витков на одном зубе. Диаметр старой проволоки можно узнать, намотав 10 витков на карандаш, измерить линейкой ширину этой намотки и разделить на 10.

Внимательно осматриваем зубы статора на наличие потертостей защитной эмали. При необходимости замазываем их лаком (можно даже лаком для ногтей).

Фломастером или маркером для дисков нумеруем зубы статора, чтобы не перепутать и не намотать проволоку не на тот зуб.

В данном случае проволока диаметром 0,3 мм будет мотаться в две жилы по 16 витков на один зуб. Это примерно 50 см сложенной вдвое проволоки на один зуб + 20 см на выводы.
Так как один провод мотается на 4 зуба с двумя выводами, а зубов всего 12, — нам нужно три двойных провода длиной около 2,5 метров. Лучше пусть будет с запасом, чем не хватит пары витков на последний зуб.
Шаг 2. Обматывание зубов статора.
Обматывание будет разделено на три этапа, по количеству проводов. Чтобы не запутываться в выводах проводов, можно отмечать их кусочками изоленты или пластыря с надписями.
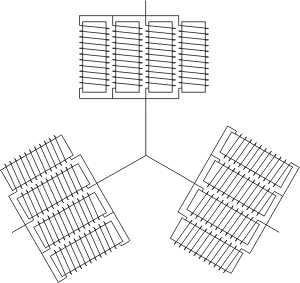
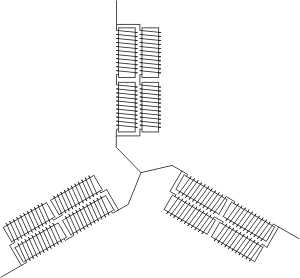
Я сознательно не прикладываю отдельные фотографии каждого обмотанного зуба – гораздо больше скажут и покажут цветные схемы.
Провод №1:
 Доставка новых самоделок на почту
Доставка новых самоделок на почту
Получайте на почту подборку новых самоделок. Никакого спама, только полезные идеи!
*Заполняя форму вы соглашаетесь на обработку персональных данных
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.usamodelkina.ru
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.


Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.

Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:

В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Обмотка трехфазного бесколлекторного двигателя выполняется медным проводом. Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.

Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).

Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.

В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.

Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов

Вариант обмотки на 12 зубов

В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
6 групп по 2 зуба

4 группы по 3 зуба

3 группы по 4 зуба

2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 – это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
Если ротор двигателя имеет два полюса, то при одном полном обороте магнитного поля на статоре, ротор совершает один полный оборот. При 4 полюсах, чтобы повернуть вал двигателя на один полный оборот потребуется два оборота магнитного поля на статоре. Чем больше количество полюсов ротора, тем больше потребуется электрических оборотов для вращения вала двигателя на один оборот. Например, имеем 42 магнита на роторе. Для того чтобы провернуть ротор на один оборот, потребуется 42/2=21 электрический оборот. Это свойство можно использовать как своеобразный редуктор. Подобрав необходимое количество полюсов, можно получить двигатель с желаемыми скоростными характеристиками. Кроме того, понимание этого процесса будет нам необходимо в будущем, при выборе параметров регулятора.
Датчики положения
Устройство двигателей без датчиков отличается от двигателей с датчиками только отсутствием последних. Других принципиальных отличий нет. Наиболее распространены датчики положения, работающие на основе эффекта Холла. Датчики реагируют на магнитное поле, их располагают, как правило, на статоре таким образом, чтобы на них воздействовали магниты ротора. Угол между датчиками должен быть 120 градусов.

Имеется в виду “электрических” градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.

На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Каждый двигатель рассчитывается под определенные требования и имеет следующие основные характеристики:
- Режим работы на который рассчитан двигатель: длительный или кратковременный. Длительный режим работы подразумевает, что двигатель может работать часами. Такие двигатели рассчитываются таким образом, чтобы теплоотдача в окружающую среду была выше тепловыделения самого двигателя. В этом случае он не будет разогреваться. Пример: вентиляция, привод эскалатора или конвейера. Кратковременный – подразумевает, что двигатель будет включаться на короткий период, за который не успеет разогреться до максимальной температуры, после чего следует длительный период, за время которого двигатель успевает остыть. Пример: привод лифта, электробритвы, фены.
- Сопротивление обмотки двигателя. Сопротивление обмотки двигателя влияет на КПД двигателя. Чем меньше сопротивление, тем выше КПД. Измерив сопротивление, можно выяснить наличие межвиткового замыкания в обмотке. Сопротивление обмотки двигателя составляет тысячные доли Ома. Для его измерения требуется специальный прибор или специальная методика измерения.
- Максимальное рабочее напряжение. Максимальное напряжение, которое способна выдержать обмотка статора. Максимальное напряжение взаимосвязано со следующим параметром.
- Максимальные обороты. Иногда указывают не максимальные обороты, а Kv – количество оборотов двигателя на один вольт без нагрузки на валу. Умножив этот показатель на максимальное напряжение, получим максимальные обороты двигателя без нагрузки на валу.
- Максимальный ток. Максимально допустимый ток обмотки. Как правило, указывается и время, в течение которого двигатель может выдержать указанный ток. Ограничение максимального тока связано с возможным перегревом обмотки. Поэтому при низких температурах окружающей среды реальное время работы с максимальным током будет больше, а в жару двигатель сгорит раньше.
- Максимальная мощность двигателя. Напрямую связана с предыдущим параметром. Это пиковая мощность, которую двигатель может развить на небольшой период времени, обычно – несколько секунд. При длительной работе на максимальной мощности неизбежен перегрев двигателя и выход его из строя.
- Номинальная мощность. Мощность, которую двигатель может развивать на протяжении всего времени включения.
- Угол опережения фазы (timing). Обмотка статора имеет некоторую индуктивность, которая затормаживает рост тока в обмотке. Ток достигнет максимума через некоторое время. Для того, чтобы компенсировать эту задержку переключение фаз выполняют с некоторым опережением. Аналогично зажиганию в двигателе внутреннего сгорания, где выставляется угол опережения зажигания с учетом времени воспламенения топлива.
Так же следует обратить внимание на то, что при номинальной нагрузке Вы не получите максимальных оборотов на валу двигателя. Kv указывается для не загруженного двигателя. При питании двигателя от батарей следует учесть “проседание” питающего напряжения под нагрузкой, что в свою очередь также снизит максимальные обороты двигателя.
Звезда и Треугольник
Обмотки бесколлекторного двигателя соединяют по схеме звезда или треугольник (дельта).
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Литература
Design and Prototyping Methods for Brushless Motors and Motor Control
by Shane W. Colton
Вентильные электрические двигатели и приводы на их основе
Овчинников И.Е.
Статьи по бесколлекторным моторам:
www.avislab.com